
回転電機
【課題】スリップリングとブラシの摺動部に発生した磨耗粉の再付着によりブラシやスリップリングに異常磨耗が発生するのを防止する。
【解決手段】気流制御板97u−1がスリップリング周方向に関して互いに隣接するブラシ96u−3,96u−1間の位置で保持板101−1に保持されている。スリップリング回転方向後側のブラシ96u−3とスリップリング95uの摺動部に発生した摩耗粉は、気流に乗ってスリップリング回転方向前側へ飛散するが、気流制御板97u−1によりスリップリング回転方向前側への飛散が妨げられ、捕捉面99u−1で捕捉されることで、スリップリング回転方向前側のブラシ96u−1とスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。
【解決手段】気流制御板97u−1がスリップリング周方向に関して互いに隣接するブラシ96u−3,96u−1間の位置で保持板101−1に保持されている。スリップリング回転方向後側のブラシ96u−3とスリップリング95uの摺動部に発生した摩耗粉は、気流に乗ってスリップリング回転方向前側へ飛散するが、気流制御板97u−1によりスリップリング回転方向前側への飛散が妨げられ、捕捉面99u−1で捕捉されることで、スリップリング回転方向前側のブラシ96u−1とスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転電機に関し、特に、回転子に回転子導体が配設され、スリップリング及びブラシを介して回転子導体に電流が流れる回転電機に関する。
【背景技術】
【0002】
この種の回転電機を備える動力伝達装置の関連技術が下記特許文献1に開示されている。特許文献1による動力伝達装置は、巻線が配設されエンジンに機械的に連結された第1ロータと、第1ロータの巻線と電磁気的に結合する磁石が配設され駆動軸に機械的に連結された第2ロータと、第2ロータの磁石と電磁気的に結合する巻線が配設されたステータと、第1ロータの巻線と電気的に接続されたスリップリングと、スリップリングと電気的に接触するブラシと、バッテリーとステータの巻線との間で電力を授受可能に制御する第1インバータと、スリップリング及びブラシを介してバッテリーと第1ロータの巻線との間で電力を授受可能に制御する第2インバータと、を備える。特許文献1においては、第1ロータに伝達されたエンジンからの動力は、第1ロータの巻線と第2ロータの磁石との電磁気結合によって第2ロータに伝達されるため、エンジンの動力により駆動軸を駆動することができる。さらに、第2インバータを介してバッテリーと第1ロータの巻線との間で電力の授受が可能になるため、第2インバータにより第1ロータの巻線の電力を制御することで、駆動軸の回転速度を制御することができる。その場合において、第1ロータの回転速度が第2ロータの回転速度よりも高いときは、第1ロータの巻線の発電電力が第2インバータを介してバッテリー側へ供給され、第1ロータの回転速度が第2ロータの回転速度よりも低いときは、バッテリーの電力が第2インバータを介して第1ロータの巻線に供給される。さらに、ステータの巻線と第2ロータの磁石との電磁気結合によって、バッテリー側から第1インバータを介してステータの巻線に供給された電力を用いて第2ロータに動力を発生させて駆動軸を駆動することができるため、第1インバータによりステータの巻線への電力供給を制御することで、駆動軸に伝達されるトルクを制御することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平9−56010号公報
【特許文献2】特開平9−182353号公報
【特許文献3】特開2009−73472号公報
【特許文献4】特開2009−274536号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1において、スリップリングとブラシの電気的接触を安定化させるためには、複数のブラシがスリップリングの外周面をそれぞれ異なる周方向位置で押圧することで、複数のブラシからスリップリングに作用する押圧力を平衡化させることが望ましい。ただし、スリップリングがブラシに対し摺動しながら回転する際には、スリップリングとブラシの摺動部に磨耗粉が発生し、摺動部に発生した磨耗粉が、スリップリングの回転に伴って発生する気流に乗ってスリップリング回転方向前側へ飛散する。スリップリング回転方向後側のブラシとスリップリングの摺動部に発生した磨耗粉が、スリップリングの回転に伴う気流に乗ってスリップリング回転方向前側へ飛散して、スリップリング回転方向前側のブラシとスリップリングの摺動部に噛み込んで再付着すると、ブラシやスリップリングに異常磨耗が発生しやすくなり、スリップリングとブラシの電気的接触不良を招きやすくなる。
【0005】
特許文献2の交流発電機においては、冷却ファンの回転に伴って発生する負圧によりスリップリングとブラシの摺動部に発生した磨耗粉の排出を図っている。しかし、吸入口である開口部は、スリップリングよりも大径の位置に大きな開口面積をもって配置されており、吸入抵抗が低いため、スリップリングの側を通過する空気量が少なくなり、磨耗粉の排出に十分な空気量を得ることが困難となる。また、冷却ファンの回転による損失が発生する。
【0006】
本発明は、スリップリングとブラシの摺動部に発生した磨耗粉の再付着によりブラシやスリップリングに異常磨耗が発生するのを防止することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係る回転電機は、上述した目的を達成するために以下の手段を採った。
【0008】
本発明に係る回転電機は、回転軸に取り付けられ、回転子導体が配設された回転子と、回転軸に取り付けられ、回転子導体に電気的に接続されたスリップリングと、スリップリング周方向に関して互いに間隔をおいて保持部材に保持された複数のブラシであって、その各々がスリップリングの外周面に電気的に接触する複数のブラシと、スリップリング周方向に関して互いに隣接するブラシ間の位置で保持部材に保持され、スリップリング回転方向後側のブラシとスリップリングの摺動部からスリップリング回転方向前側へ飛散した摩耗粉を捕捉面で捕捉してスリップリング回転方向前側のブラシとスリップリングの摺動部への付着を防止するための摩耗粉捕捉部材と、を備えることを要旨とする。
【0009】
本発明の一態様では、摩耗粉捕捉部材は、前記スリップリング回転方向後側のブラシより前記スリップリング回転方向前側のブラシに近い位置で保持部材に保持されていることが好適である。
【0010】
本発明の一態様では、摩耗粉捕捉部材は、前記スリップリング回転方向前側のブラシより前記スリップリング回転方向後側のブラシに近い位置で保持部材に保持されていることが好適である。
【0011】
本発明の一態様では、保持部材は、ブラシ及び摩耗粉捕捉部材より回転軸方向の一方側に配置され、摩耗粉捕捉部材の捕捉面は、回転軸方向に対してその一方側から他方側にかけてスリップリング回転方向へ傾斜していることが好適である。
【0012】
本発明の一態様では、複数のスリップリングが回転軸方向に関して互いに間隔をおいて回転軸に取り付けられ、前記複数のブラシと前記摩耗粉捕捉部材が各スリップリング毎に対応して設けられ、保持部材とスリップリングが回転軸方向に関してその一方側から他方側にかけて交互に配置され、各摩耗粉捕捉部材の捕捉面は、回転軸方向に対してその一方側から他方側にかけてスリップリング回転方向へ傾斜しており、回転軸方向に関して最も一方側のスリップリングより他方側に配置された保持部材には、当該保持部材に対して回転軸方向の一方側に隣接する摩耗粉捕捉部材の捕捉面で捕捉された摩耗粉を回転軸方向の他方側へ排出するための摩耗粉排出口が当該捕捉面に臨んで形成されていることが好適である。
【0013】
本発明の一態様では、回転軸方向に関して摩耗粉排出口の形成された保持部材を挟んで隣接する摩耗粉捕捉部材の一方側が他方側よりスリップリング回転方向後側に配置され、保持部材の摩耗粉排出口を通って回転軸方向の他方側へ排出された磨耗粉が、当該保持部材に対して回転軸方向の他方側に隣接する摩耗粉捕捉部材の捕捉面で捕捉されることが好適である。
【0014】
本発明の一態様では、回転軸方向に関して最も一方側のスリップリングより他方側に配置された保持部材には、通風口がスリップリング周方向に関して前記スリップリング回転方向後側のブラシと摩耗粉排出口との間の位置に形成されていることが好適である。
【0015】
本発明の一態様では、交流電流が流れることで回転磁界を発生可能な固定子導体が配設された固定子と、前記回転子導体が配設された回転子である第1回転子に対し相対回転可能であり、回転子導体に交流電流が流れることで発生した回転磁界が作用するのに応じて第1回転子との間にトルクが作用し、固定子導体で発生した回転磁界が作用するのに応じて固定子との間にトルクが作用する第2回転子と、をさらに備えることが好適である。
【発明の効果】
【0016】
本発明によれば、スリップリング回転方向後側のブラシとスリップリングの摺動部からスリップリング回転方向前側へ飛散した摩耗粉を、スリップリング周方向に関して互いに隣接するブラシ間の位置で保持された摩耗粉捕捉部材の捕捉面で捕捉して、スリップリング回転方向前側のブラシとスリップリングの摺動部への付着を防止することができるので、ブラシやスリップリングに異常磨耗が発生するのを防止することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施形態に係る回転電機を備えるハイブリッド駆動装置の概略構成を示す図である。
【図2】本発明の実施形態に係る回転電機の概略構成を示す図である。
【図3】本発明の実施形態に係る回転電機の概略構成を示す図である。
【図4】入力側ロータ28、出力側ロータ18、及びステータ16の構成例を示す図である。
【図5】本発明の実施形態に係る回転電機の概略構成を示す図である。
【図6】本発明の実施形態に係る回転電機の概略構成を示す図である。
【図7】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図8】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図9】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図10】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図11】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図12】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図13】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図14】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図15】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図16】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【発明を実施するための形態】
【0018】
以下、本発明を実施するための形態(以下実施形態という)を図面に従って説明する。
【0019】
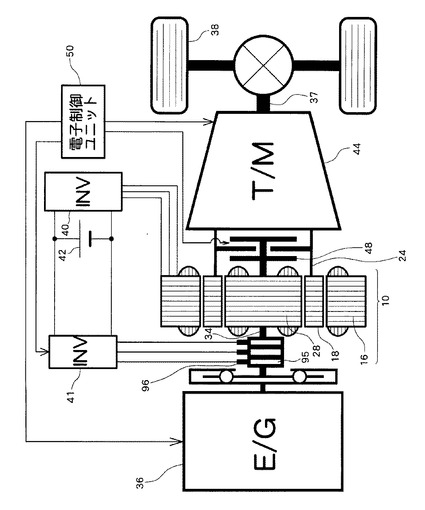
図1〜3は、本発明の実施形態に係る回転電機10を備えるハイブリッド駆動装置の構成の概略を示す図であり、図1は全体構成の概略を示し、図2,3は回転電機10の構成の概略を示す。本実施形態に係るハイブリッド駆動装置は、動力(機械的動力)を発生可能な原動機として設けられたエンジン(内燃機関)36と、エンジン36と駆動軸37(車輪38)との間に設けられ、変速比の変更が可能な変速機(機械式変速機)44と、エンジン36と変速機44との間に設けられ、動力(機械的動力)の発生及び発電が可能な回転電機10と、を備える。なお、本実施形態に係るハイブリッド駆動装置については、例えば車両を駆動するための動力出力装置として用いることができる。
【0020】
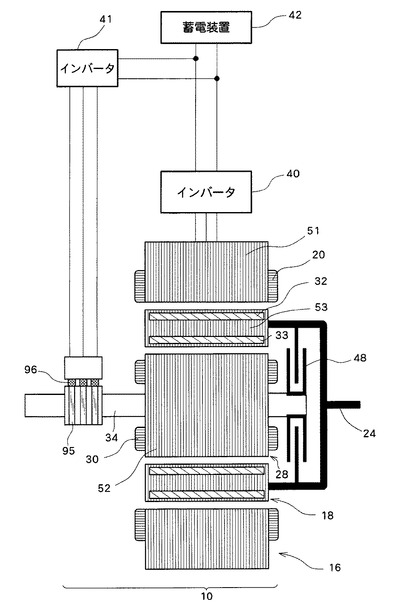
回転電機10は、ケースハウジングに固定されたステータ16と、ステータ16に対し相対回転可能な第1ロータ28と、ロータ回転軸と直交する径方向においてステータ16及び第1ロータ28と所定の空隙を空けて対向し、ステータ16及び第1ロータ28に対し相対回転可能な第2ロータ18と、スリップリング95及びブラシ96と、を有する。ステータ16は、第1ロータ28より径方向外側の位置に第1ロータ28と間隔を空けて配置されており、第2ロータ18は、径方向においてステータ16と第1ロータ28との間の位置に配置されている。つまり、第1ロータ28は第2ロータ18より径方向内側の位置で第2ロータ18と対向配置されており、ステータ16は第2ロータ18より径方向外側の位置で第2ロータ18と対向配置されている。第1ロータ28は回転電機10の入力軸34(第1回転軸)に取り付けられ、入力軸34はエンジン36と機械的に連結されていることで、入力軸34(第1ロータ28)にはエンジン36からの動力が伝達される。一方、第2ロータ18は回転電機10の出力軸24(第2回転軸)に取り付けられ、出力軸24は変速機44を介して駆動軸37と機械的に連結されていることで、駆動軸37(車輪38)には出力軸24(第2ロータ18)からの動力が変速機44で変速されてから伝達される。なお、以下の説明では、第1ロータ28を入力側ロータとし、第2ロータ18を出力側ロータとする。
【0021】
入力側ロータ28は、ロータコア(第1回転子鉄心)52と、ロータコア52にその周方向に沿って配設された複数相(例えば3相)のロータ巻線30と、を含む。複数相のロータ巻線30に複数相(例えば3相)の交流電流が流れることで、ロータ巻線30は、ロータ周方向に回転する回転磁界を発生することができる。
【0022】
ステータ16は、ステータコア(固定子鉄心)51と、ステータコア51にその周方向に沿って配設された複数相(例えば3相)のステータ巻線20と、を含む。複数相のステータ巻線20に複数相(例えば3相)の交流電流が流れることで、ステータ巻線20は、ステータ周方向に回転する回転磁界を発生することができる。
【0023】
出力側ロータ18は、ロータコア(第2回転子鉄心)53と、ロータコア53にその周方向に沿って配設され界磁束を発生する永久磁石32,33と、を含む。永久磁石32は、ロータコア53の外周部にステータ16(ステータコア51)と対向して配設されており、永久磁石33は、ロータコア53の内周部に入力側ロータ28(ロータコア52)と対向して配設されている。ここでは、永久磁石32,33を一体化することも可能である。
【0024】
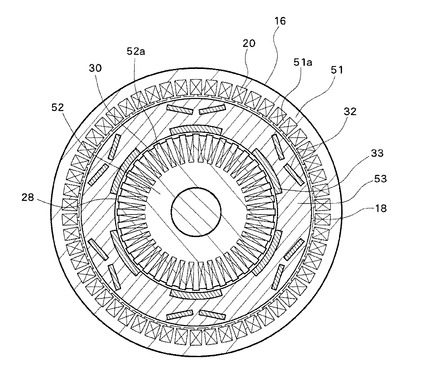
入力側ロータ28、出力側ロータ18、及びステータ16のより詳細な構成例を図4に示す。図4に示す例では、入力側ロータ28、出力側ロータ18、及びステータ16が同心円状に配置されている。ステータ16のステータコア51には、径方向内側へ(出力側ロータ18へ向けて)突出した複数のティース51aがステータ周方向に沿って間隔をおいて配列されており、各ステータ巻線20がこれらのティース51aに巻回されていることで、磁極が構成される。入力側ロータ28のロータコア52には、径方向外側へ(出力側ロータ18へ向けて)突出した複数のティース52aがロータ周方向に沿って間隔をおいて配列されており、各ロータ巻線30がこれらのティース52aに巻回されていることで、磁極が構成される。ステータ16のティース51aと出力側ロータ18の永久磁石32とが出力側ロータ18の回転中心軸(入力側ロータ28の回転中心軸と一致する)に直交する径方向に対向配置されており、入力側ロータ28のティース52aと出力側ロータ18の永久磁石33とがこの径方向に対向配置されている。ステータ巻線20の巻回軸及びロータ巻線30の巻回軸は、この径方向(入力側ロータ28と出力側ロータ18が対向する方向)に一致している。永久磁石32,33はロータ周方向に間隔をおいて配列されており、さらに、永久磁石32はロータコア53内にV字状に埋設されている。ただし、永久磁石32,33については、出力側ロータ18の表面(外周面または内周面)に露出していてもよいし、出力側ロータ18内(ロータコア53内)に埋設されていてもよい。
【0025】
クラッチ48は、エンジン36と変速機44との間に、回転電機10(入力側ロータ28及び出力側ロータ18)に対し並列に設けられている。クラッチ48の係合/解放により、入力側ロータ28と出力側ロータ18との機械的係合/その解除を選択的に行うことが可能である。クラッチ48を係合させて、入力側ロータ28と出力側ロータ18とを機械的に係合させることで、入力側ロータ28と出力側ロータ18とが一体となって等しい回転速度で回転する。一方、クラッチ48を解放して、入力側ロータ28と出力側ロータ18との機械的係合を解除することで、入力側ロータ28と出力側ロータ18との回転速度差が許容される。ここでのクラッチ48は、例えば油圧や電磁力を利用して係合/解放を切り替えることが可能であり、さらに、クラッチ48に供給する油圧力や電磁力を調整することで締結力を調整することもできる。
【0026】
直流電源として設けられた充放電可能な蓄電装置42は、例えば二次電池により構成することができ、電気エネルギーを蓄える。インバータ40は、スイッチング素子と、スイッチング素子に対し逆並列接続されたダイオード(整流素子)とを備える公知の構成により実現可能であり、スイッチング素子のスイッチング動作により蓄電装置42からの直流電力を交流(例えば3相交流)に変換して、ステータ巻線20の各相に供給することが可能である。さらに、インバータ40は、ステータ巻線20の各相に流れる交流電流を直流に変換して、電気エネルギーを蓄電装置42に回収する方向の電力変換も可能である。このように、インバータ40は、蓄電装置42とステータ巻線20との間で双方向の電力変換を行うことが可能である。
【0027】
スリップリング95は、ロータ回転軸方向に関して入力側ロータ28と間隔をおいて入力軸34に取り付けられていることで、入力側ロータ28と機械的に連結されており、さらに、ロータ巻線30の各相と電気的に接続されている。回転が固定されたブラシ96は、スリップリング95に押し付けられて電気的に接触する。スリップリング95は、ブラシ96に対し摺動しながら(ブラシ96との電気的接触を維持しながら)、入力側ロータ28とともに回転する。ブラシ96は、インバータ41と電気的に接続されている。インバータ41は、スイッチング素子と、スイッチング素子に対し逆並列接続されたダイオード(整流素子)とを備える公知の構成により実現可能であり、スイッチング素子のスイッチング動作により蓄電装置42からの直流電力を交流(例えば3相交流)に変換して、ブラシ96及びスリップリング95を介してロータ巻線30の各相に供給することが可能である。さらに、インバータ41は、ロータ巻線30の各相に流れる交流電流を直流に変換する方向の電力変換も可能である。その際には、ロータ巻線30の交流電力がスリップリング95及びブラシ96により取り出され、この取り出された交流電力がインバータ41で直流に変換される。インバータ41で直流に変換された電力は、インバータ40で交流に変換されてからステータ巻線20の各相へ供給可能である。つまり、インバータ40は、インバータ41からの直流電力と蓄電装置42からの直流電力とのいずれか(少なくとも一方)を交流に変換してステータ巻線20の各相へ供給することが可能である。また、インバータ41で直流に変換された電力を蓄電装置42に回収することも可能である。このように、インバータ41は、蓄電装置42及びインバータ40のいずれかとロータ巻線30との間で双方向の電力変換を行うことが可能である。
【0028】
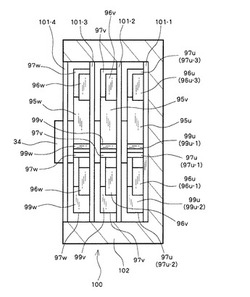
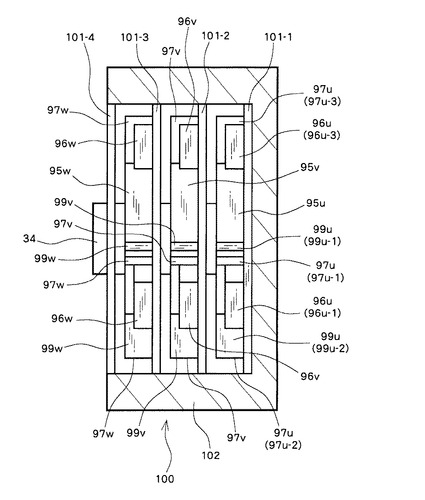
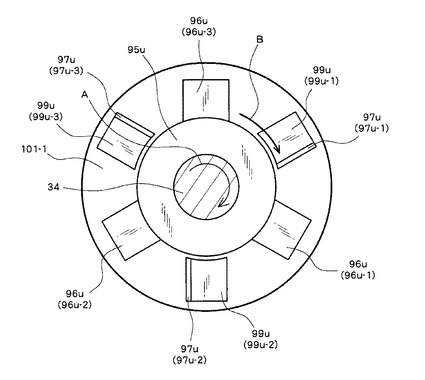
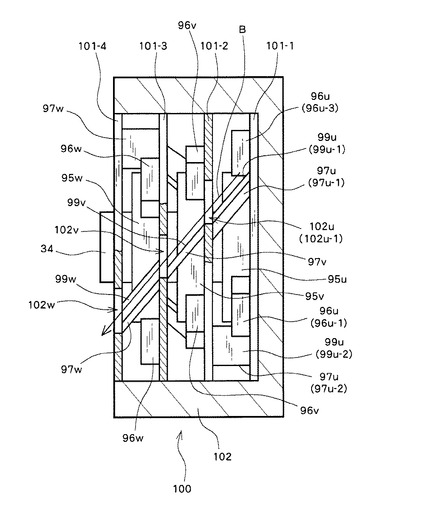
スリップリング95及びブラシ96のより詳細な構成例を図5,6に示す。図5,6に示す例では、ロータ巻線30の各相(u相、v相、w相)毎に対応して設けられた複数のスリップリング95u,95v,95wがロータ回転軸方向に関して互いに間隔をおいて(等間隔で)入力軸34に取り付けられ、各スリップリング95u,95v,95w毎に対応して設けられた複数のブラシ96u,96v,96wがブラシケース100内に収容されている。ブラシケース100は、ロータ回転軸方向に関して互いに間隔をおいて(等間隔で)配置された複数の電気絶縁性の保持板101−1〜101−4と、各保持板101−1〜101−4の外周に接合され、ブラシ96u,96v,96wの外周囲を取り囲む電気絶縁性の周壁102とを含んで構成される。保持板101−1〜101−4とスリップリング95u,95v,95wがロータ回転軸方向に関して交互に配置され、ロータ回転軸方向の一方側(図5の右側)から他方側(図5の左側)にかけて、保持板101−1、スリップリング95u、保持板101−2、スリップリング95v、保持板101−3、スリップリング95w、保持板101−4の順に配置されている。以下の説明において、複数(3つ)のブラシ96uを区別する必要があるときは、以降96u−1,96u−2,96u−3の符号を用いて説明する。
【0029】
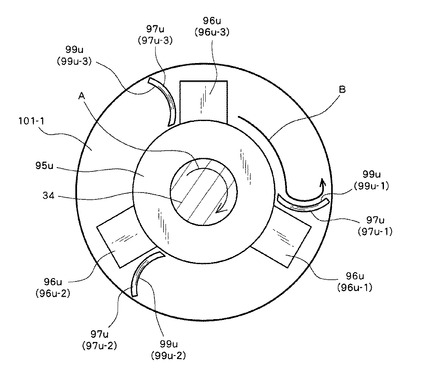
図6に示すように、スリップリング95uの外周には、複数のブラシ96u−1〜96u−3がスリップリング周方向に関して互いに間隔をおいて(等間隔で)配列され、各ブラシ96u−1〜96u−3がスリップリング95uの外周面に電気的に接触する。ブラシ96u−1〜96u−3は、ロータ回転軸方向の一方側に隣接して配置された保持板101−1に保持されている。複数のブラシ96u−1〜96u−3がスリップリング95uの外周面をそれぞれ異なる周方向位置で押圧することで、複数のブラシ96u−1〜96u−3からスリップリング95uに作用する押圧力の平衡化を図ることが可能となり、スリップリング95uとブラシ96u−1〜96u−3との電気的接触を安定化させることが可能となる。同様に、スリップリング95vの外周には、複数のブラシ96vがスリップリング周方向に関して互いに間隔をおいて(等間隔で)配列され、各ブラシ96vがスリップリング95vの外周面に電気的に接触し、スリップリング95wの外周には、複数のブラシ96wがスリップリング周方向に関して互いに間隔をおいて(等間隔で)配列され、各ブラシ96wがスリップリング95wの外周面に電気的に接触する。ブラシ96vはロータ回転軸方向の一方側に隣接して配置された保持板101−2に保持され、ブラシ96wはロータ回転軸方向の一方側に隣接して配置された保持板101−3に保持されている。図5,6に示す例では、スリップリング周方向に関する各ブラシ96u,96v,96wの位置は互いに一致している。
【0030】
電子制御ユニット50は、インバータ40のスイッチング素子のスイッチング動作を制御してインバータ40での電力変換を制御することで、ステータ巻線20の各相に流れる交流電流を制御する。そして、電子制御ユニット50は、インバータ41のスイッチング素子のスイッチング動作を制御してインバータ41での電力変換を制御することで、ロータ巻線30の各相に流れる交流電流を制御する。そして、電子制御ユニット50は、クラッチ48の係合/解放を切り替えることで、入力側ロータ28と出力側ロータ18との機械的係合/その解除を切り替える制御も行う。さらに、電子制御ユニット50は、エンジン36の運転状態の制御、及び変速機44の変速比の制御も行う。
【0031】
インバータ40のスイッチング動作により複数相のステータ巻線20に複数相(例えば3相)の交流電流が流れることで、ステータ巻線20は、ステータ周方向に回転する回転磁界を発生する。そして、ステータ巻線20で発生した回転磁界と永久磁石32で発生した界磁束との電磁気相互作用(吸引及び反発作用)により、出力側ロータ18にトルク(磁石トルク)を作用させることができ、出力側ロータ18を回転駆動することができる。つまり、蓄電装置42からインバータ40を介してステータ巻線20に供給された電力を出力側ロータ18の動力(機械的動力)に変換することができ、ステータ16及び出力側ロータ18を同期電動機(PMモータ部)として機能させることができる。さらに、出力側ロータ18の動力をステータ巻線20の電力に変換してインバータ40を介して蓄電装置42に回収することも可能である。このように、ステータ16のステータ巻線20と出力側ロータ18の永久磁石32とが電磁気的に結合されていることで、ステータ巻線20で発生する回転磁界を出力側ロータ18に作用させて、ステータ16と出力側ロータ18との間にトルク(磁石トルク)を作用させることができる。さらに、例えば図4に示すように、永久磁石32間に突極部として磁性体(強磁性体)がステータ16(ティース51a)と対向して配置されている例や、永久磁石32が出力側ロータ18内(ロータコア53内)に埋設されている例では、ステータ16の発生する回転磁界が出力側ロータ18に作用するのに応じて、磁石トルクに加えてリラクタンストルクもステータ16と出力側ロータ18との間に作用する。電子制御ユニット50は、インバータ40のスイッチング動作により例えばステータ巻線20に流す交流電流の振幅や位相角を制御することで、ステータ16と出力側ロータ18との間に作用するトルクを制御することができる。
【0032】
また、入力側ロータ28が出力側ロータ18に対し相対回転して入力側ロータ28(ロータ巻線30)と出力側ロータ18(永久磁石33)との間に回転差が生じるのに伴ってロータ巻線30に誘導起電力が発生し、この誘導起電力に起因してロータ巻線30に誘導電流(交流電流)が流れることで回転磁界が生じる。そして、ロータ巻線30の誘導電流により生じる回転磁界と永久磁石33の界磁束との電磁気相互作用によっても、出力側ロータ18にトルクを作用させることができ、出力側ロータ18を回転駆動することができる。このように、入力側ロータ28のロータ巻線30と出力側ロータ18の永久磁石33とが電磁気的に結合されていることで、ロータ巻線30で発生する回転磁界が出力側ロータ18に作用するのに応じて、入力側ロータ28と出力側ロータ18との間にトルク(磁石トルク)が作用する。そのため、入力側ロータ28と出力側ロータ18との間で動力(機械的動力)を伝達することができ、入力側ロータ28及び出力側ロータ18を誘導電磁カップリング部として機能させることができる。
【0033】
ロータ巻線30の誘導電流により入力側ロータ28と出力側ロータ18との間にトルク(電磁カップリングトルク)を発生させる際には、電子制御ユニット50は、ロータ巻線30に誘導電流が流れるのを許容するように、インバータ41のスイッチング動作を行う。その際には、電子制御ユニット50は、インバータ41のスイッチング動作によりロータ巻線30に流れる交流電流を制御することで、入力側ロータ28と出力側ロータ18との間に作用する電磁カップリングトルクを制御することができる。一方、電子制御ユニット50は、インバータ41のスイッチング素子をオフ状態に維持してスイッチング動作を停止させることで、ロータ巻線30に誘導電流が流れなくなり、入力側ロータ28と出力側ロータ18との間にトルクは作用しなくなる。
【0034】
次に、本実施形態に係るハイブリッド駆動装置の動作について説明する。
【0035】
エンジン36が動力を発生している場合は、エンジン36の動力が入力側ロータ28に伝達され、入力側ロータ28がエンジン回転方向に回転駆動する。クラッチ48が解放されている状態で、入力側ロータ28の回転速度が出力側ロータ18の回転速度より高くなると、ロータ巻線30に誘導起電力が発生する。電子制御ユニット50は、ロータ巻線30に誘導電流が流れるのを許容するように、インバータ41のスイッチング動作を行う。これによって、ロータ巻線30の誘導電流と永久磁石33の界磁束との電磁気相互作用により入力側ロータ28から出力側ロータ18にエンジン回転方向の電磁カップリングトルクが作用して出力側ロータ18がエンジン回転方向に回転駆動する。このように、入力側ロータ28に伝達されたエンジン36からの動力は、入力側ロータ28のロータ巻線30と出力側ロータ18の永久磁石33との電磁気結合によって、出力側ロータ18へ伝達される。出力側ロータ18に伝達された動力は、変速機44で変速されてから駆動軸37(車輪38)へ伝達されることで、車両の前進駆動等、負荷の正転駆動に用いられる。したがって、エンジン36の動力を用いて車輪38を正転方向に回転駆動することができ、車両を前進方向に駆動することができる。さらに、入力側ロータ28と出力側ロータ18との回転差を許容することができるため、車輪38の回転が停止してもエンジン36がストールすることはない。そのため、回転電機10を発進装置として機能させることができ、摩擦クラッチやトルクコンバータ等の発進装置を別に設ける必要がなくなる。
【0036】
さらに、ロータ巻線30に発生した交流電力は、スリップリング95及びブラシ96を介して取り出される。取り出された交流電力はインバータ41で直流に変換される。そして、インバータ40のスイッチング動作により、インバータ41からの直流電力がインバータ40で交流に変換されてからステータ巻線20に供給されることで、ステータ巻線20に交流電流が流れ、ステータ16に回転磁界が形成される。このステータ16の回転磁界と出力側ロータ18の永久磁石32の界磁束との電磁気相互作用によっても、出力側ロータ18にエンジン回転方向のトルクを作用させることができる。これによって、出力側ロータ18のエンジン回転方向のトルクを増幅させるトルク増幅機能を実現することができる。また、インバータ41からの直流電力を蓄電装置42に回収することも可能である。
【0037】
さらに、蓄電装置42からステータ巻線20へ電力供給するようにインバータ40のスイッチング動作を制御することで、エンジン36の動力を用いて車輪38を正転方向に回転駆動するとともに、ステータ巻線20への供給電力を用いて発生させた出力側ロータ18の動力により車輪38の正転方向の回転駆動をアシストすることができる。また、負荷の減速運転時には、電子制御ユニット50は、ステータ巻線20から蓄電装置42へ電力回収するようにインバータ40のスイッチング動作を制御することで、負荷の動力をステータ巻線20と永久磁石32との電磁気結合によってステータ巻線20の電力に変換して蓄電装置42に回収することができる。
【0038】
また、クラッチ48を係合して入力側ロータ28と出力側ロータ18とを機械的に連結することで、ロータ巻線30に交流電流が流れず入力側ロータ28と出力側ロータ18との間にトルクが作用しなくても、エンジン36からの動力をクラッチ48を介して駆動軸37(車輪38)へ伝達することができる。これによって、入力側ロータ28と出力側ロータ18との間のすべりに伴ってロータ巻線30に誘導電流が流れることで生じるジュール損失を抑えることが可能となる。
【0039】
また、エンジン36の動力を用いずに回転電機10の動力を用いて負荷を駆動する(車輪38を回転駆動する)EV(Electric Vehicle)走行を行う場合は、電子制御ユニット50は、インバータ40のスイッチング動作を制御することで、負荷の駆動制御を行う。例えば、電子制御ユニット50は、蓄電装置42からの直流電力を交流に変換してステータ巻線20へ供給するように、インバータ40のスイッチング動作を制御することで、ステータ巻線20への供給電力をステータ巻線20と永久磁石32との電磁気結合によって出力側ロータ18の動力に変換し、駆動軸37(車輪38)を回転駆動する。このように、エンジン36が動力を発生していなくても、ステータ巻線20への電力供給により車輪38を回転駆動することができる。なお、EV走行を行う場合は、クラッチ48を解放状態に制御する。
【0040】
また、エンジン36を始動する場合は、電子制御ユニット50は、蓄電装置42からの直流電力をインバータ41で交流に変換してスリップリング95及びブラシ96を介してロータ巻線30へ供給するように、インバータ41のスイッチング動作を制御することで、ロータ巻線30への供給電力を用いてエンジン36のクランキングを行うことができる。エンジン36のクランキングの際には、入力側ロータ28の回転磁界と出力側ロータ18の永久磁石33の界磁束との電磁気相互作用によりエンジン36に繋がる入力側ロータ28にトルクを作用させるが、出力側ロータ18もその反力トルクを受けることになる。そのため、EV走行時にエンジン36を始動する場合は、蓄電装置42からステータ巻線20へ電力供給して出力側ロータ18にこの反力トルクを打ち消すトルクを作用させるようにインバータ40のスイッチング動作を制御することで、ステータ巻線20への供給電力を用いて出力側ロータ18を回転駆動することができる。なお、エンジン36を始動する場合は、クラッチ48を解放状態に制御する。
【0041】
本実施形態において、エンジン36の動力を車輪38へ伝達する際には、スリップリング95u,95v,95wがブラシ96u,96v,96wに対し摺動しながら回転することで、スリップリング95u,95v,95wとブラシ96u,96v,96wの摺動部に磨耗粉が発生する。摺動部に発生した磨耗粉は、スリップリング95u,95v,95wの回転に伴って発生する気流に乗ってスリップリング回転方向前側へ飛散する(入力軸34及びスリップリング95u,95v,95wの回転方向を図6の矢印Aに示す)。図5,6に示す構成例において、スリップリング回転方向後側のブラシ(例えばブラシ96u−1)とスリップリング95uの摺動部に発生した磨耗粉が、スリップリング95uの回転に伴う気流に乗ってスリップリング回転方向前側へ飛散して、スリップリング回転方向前側のブラシ(例えばブラシ96u−2)とスリップリング95uの摺動部に噛み込んで再付着すると、ブラシ96u−2やスリップリング95uに異常磨耗が発生しやすくなり、ブラシ96u−2とスリップリング95uの電気的接触不良を招きやすくなる。
【0042】
これに対して本実施形態では、スリップリング95u,95v,95wとブラシ96u,96v,96wの摺動部からスリップリング回転方向前側へ飛散した摩耗粉を捕捉するための摩耗粉捕捉部材として、複数の電気絶縁性の気流制御板97u,97v,97wが設けられている。以下の説明において、複数(3つ)の気流制御板97uを区別する必要があるときは、以降97u−1,97u−2,97u−3の符号を用いて説明する。図5,6に示すように、気流制御板97u−1は、スリップリング周方向に関して互いに隣接するブラシ96u−3,96u−1間の位置で保持板101−1に保持され、気流制御板97u−m(mは2または3)は、スリップリング周方向に関して互いに隣接するブラシ96u−(m−1),96u−m間の位置で保持板101−1に保持されている。図5,6に示す例では、気流制御板97u−1は、スリップリング周方向に隣接するブラシ96u−3,96u−1のうち、スリップリング回転方向後側のブラシ96u−3よりスリップリング回転方向前側のブラシ96u−1に近い位置で保持板101−1に保持され、気流制御板97u−mは、スリップリング周方向に隣接するブラシ96u−(m−1),96u−mのうち、スリップリング回転方向後側のブラシ96u−(m−1)よりスリップリング回転方向前側のブラシ96u−mに近い位置で保持板101−1に保持されている。各気流制御板97u−1〜97u−3(スリップリング回転方向後側の捕捉面99u−1〜99u−3)は、径方向の両端部より中央部がスリップリング回転方向前側へ窪んだ状態で湾曲して形成されている。各気流制御板97u−1〜97u−3の径方向内側の端部は、スリップリング95uの外周面と接触しない程度の微小空隙をあけてスリップリング95uの外周面に近接配置されている。図5,6に示す例では、ブラシ96u及び気流制御板97uの個数がそれぞれ3つであるが、ブラシ96u及び気流制御板97uの個数は任意に設定することが可能である。
【0043】
同様に、気流制御板97vがスリップリング周方向に関して互いに隣接するブラシ96v間の位置(スリップリング回転方向前側に隣接するブラシ96vに近い位置)で保持板101−2に保持され、気流制御板97wがスリップリング周方向に関して互いに隣接するブラシ96w間の位置(スリップリング回転方向前側に隣接するブラシ96wに近い位置)で保持板101−3に保持されている。そして、各気流制御板97v,97w(スリップリング回転方向後側の捕捉面99v,99w)は、径方向の両端部より中央部がスリップリング回転方向前側へ窪んだ状態で湾曲して形成され、各気流制御板97v,97wの径方向内側の端部は、スリップリング95v,95wの外周面と接触しない程度の微小空隙をあけてスリップリング95v,95wの外周面に近接配置されている。図5,6に示す例では、スリップリング周方向に関する各気流制御板97u,97v,97wの位置は互いに一致している。
【0044】
図5,6に示す構成例では、スリップリング95uの外周囲には、スリップリング95uの回転に伴って気流が発生するが、スリップリング周方向に隣接するブラシ96u−3,96u−1間の気流については、図6の矢印Bに示すように、スリップリング回転方向の速度成分が気流制御板97u−1により妨げられ、捕捉面99u−1に沿って曲げられることで、径方向外側への速度成分が増加する。そのため、スリップリング回転方向後側のブラシ96u−3とスリップリング95uの摺動部に発生した摩耗粉は、気流に乗ってスリップリング回転方向前側へ飛散するが、気流制御板97u−1によりスリップリング回転方向前側への飛散が妨げられ、捕捉面99u−1で捕捉される。これによって、スリップリング回転方向後側のブラシ96u−3とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉が、スリップリング回転方向前側のブラシ96u−1とスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。そして、スリップリング周方向に隣接するブラシ96u−(m−1),96u−m間の気流についても、スリップリング回転方向の速度成分が気流制御板97u−mにより妨げられ、捕捉面99u−mに沿って曲げられることで、径方向外側への速度成分が増加する。そのため、スリップリング回転方向後側のブラシ96u−(m−1)とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−mによりスリップリング回転方向前側への飛散が妨げられ、捕捉面99u−mで捕捉されることで、スリップリング回転方向前側のブラシ96u−mとスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。
【0045】
したがって、本実施形態によれば、ブラシ96uとスリップリング95uの異常磨耗を防止することができるとともに、ブラシ96uとスリップリング95uの電気的接触不良を防止することができる。その結果、ブラシ96uとスリップリング95uの磨耗量を低減することができ、ブラシ96uとスリップリング95uの耐久性を向上させることができる。さらに、気流制御板97uにより気流を制御することで、ブラシ96uとスリップリング95uの冷却効果も得ることができる。なお、スリップリング回転方向前側のブラシ(例えばブラシ96u−m)とスリップリング95uの摺動部への摩耗粉の再付着をより確実に防止するためには、気流制御板97u−mをブラシ96u−mのスリップリング回転方向後側に極力近接させて配置することが好ましい。
【0046】
同様に、スリップリング回転方向後側のブラシ96v,96wとスリップリング95v,95wの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97v,97wによりスリップリング回転方向前側への飛散が妨げられ、捕捉面99v,99wで捕捉されることで、スリップリング回転方向前側のブラシ96v,96wとスリップリング95v,95wの摺動部に噛み込んで再付着するのを防止することができる。なお、気流制御板97v,97wについても、スリップリング回転方向前側のブラシ96v,96wとスリップリング95v,95wの摺動部への摩耗粉の再付着をより確実に防止するためには、スリップリング回転方向前側に隣接するブラシ96v,96wに極力近接させて配置することが好ましい。
【0047】
次に、本実施形態の他の構成例について説明する。
【0048】
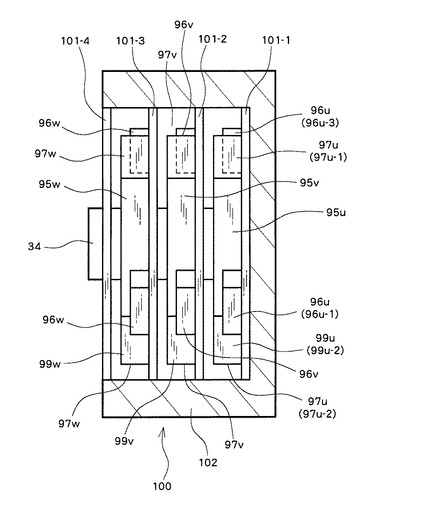
図7,8に示す構成例では、図5,6に示す構成例と比較して、気流制御板97u−1は、スリップリング周方向に隣接するブラシ96u−3,96u−1のうち、スリップリング回転方向前側のブラシ96u−1よりスリップリング回転方向後側のブラシ96u−3に近い位置で保持板101−1に保持され、気流制御板97u−m(mは2または3)は、スリップリング周方向に隣接するブラシ96u−(m−1),96u−mのうち、スリップリング回転方向前側のブラシ96u−mよりスリップリング回転方向後側のブラシ96u−(m−1)に近い位置で保持板101−1に保持されている。同様に、気流制御板97vがスリップリング回転方向後側に隣接するブラシ96vに近い位置で保持板101−2に保持され、気流制御板97wがスリップリング回転方向後側に隣接するブラシ96wに近い位置で保持板101−3に保持されている。図7,8に示す例でも、スリップリング周方向に関する各気流制御板97u,97v,97wの位置は互いに一致している。
【0049】
図7,8に示す構成例でも、スリップリング周方向に隣接するブラシ96u−3,96u−1間の気流については、図8の矢印Bに示すように、スリップリング回転方向の速度成分が気流制御板97u−1により妨げられ、捕捉面99u−1に沿って曲げられることで、径方向外側への速度成分が増加する。そのため、スリップリング回転方向後側のブラシ96u−3とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−1によりスリップリング回転方向前側への飛散が妨げられ、捕捉面99u−1で捕捉されることで、スリップリング回転方向前側のブラシ96u−1とスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。そして、スリップリング周方向に隣接するブラシ96u−(m−1),96u−m間の気流についても、スリップリング回転方向の速度成分が気流制御板97u−mにより妨げられるため、スリップリング回転方向後側のブラシ96u−(m−1)とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−mによりスリップリング回転方向前側への飛散が妨げられ、捕捉面99u−mで捕捉されることで、スリップリング回転方向前側のブラシ96u−mとスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。同様に、スリップリング回転方向後側のブラシ96v,96wとスリップリング95v,95wの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97v,97wによりスリップリング回転方向前側への飛散が妨げられ、捕捉面99v,99wで捕捉されることで、スリップリング回転方向前側のブラシ96v,96wとスリップリング95v,95wの摺動部に噛み込んで再付着するのを防止することができる。なお、スリップリング回転方向後側のブラシ(例えばブラシ96u−(m−1))とスリップリング95uの摺動部から飛散した摩耗粉をより確実に捕捉するためには、気流制御板97u−mをブラシ96u−(m−1)のスリップリング回転方向前側に極力近接させて配置することが好ましく、気流制御板97v,97wについても、スリップリング回転方向後側のブラシ96v,96wとスリップリング95v,95wの摺動部から飛散した摩耗粉をより確実に捕捉するためには、スリップリング回転方向後側に隣接するブラシ96v,96wに極力近接させて配置することが好ましい。
【0050】
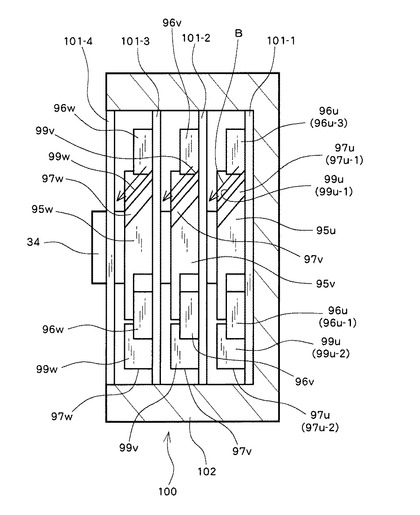
また、図9,10に示す構成例では、図5,6に示す構成例と比較して、各気流制御板97u−1〜97u−3(捕捉面99u−1〜99u−3)は、ロータ回転軸方向に対してその一方側(図9の右側)から他方側(図9の左側)にかけてスリップリング回転方向へ傾斜して形成されている。同様に、各気流制御板97v,97w(捕捉面99v,99w)も、ロータ回転軸方向に対してその一方側から他方側にかけてスリップリング回転方向へ傾斜して形成されている。図9,10に示す例では、スリップリング周方向に関する各気流制御板97u,97v,97wの位置は互いに一致しており、各気流制御板97u,97v,97w(捕捉面99u,99v,99w)のロータ回転軸方向に対する傾斜角度は互いに等しい。気流制御板(例えば気流制御板97u−m)については、スリップリング回転方向後側のブラシ96u−(m−1)よりスリップリング回転方向前側のブラシ96u−mに近い位置に配置することも可能であるし、スリップリング回転方向前側のブラシ96u−mよりスリップリング回転方向後側のブラシ96u−(m−1)に近い位置に配置することも可能である(気流制御板97v,97wについても同様である)。
【0051】
図9,10に示す構成例によれば、スリップリング周方向に隣接するブラシ96u−3,96u−1間の気流については、図9,10の矢印Bに示すように、スリップリング回転方向の速度成分が気流制御板97u−1により妨げられ、捕捉面99u−1に沿って曲げられることで、ロータ回転軸方向の他方側への速度成分が増加する。そのため、スリップリング回転方向後側のブラシ96u−3とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−1の捕捉面99u−1によりスリップリング回転方向前側への飛散が妨げられて捕捉され、捕捉面99u−1に沿って移動することで、スリップリング回転方向前側のブラシ96u−1とスリップリング95uの摺動部に対してロータ回転軸方向の他方側にずれた位置に堆積する。これによって、スリップリング回転方向前側へ飛散した摩耗粉がスリップリング回転方向前側のブラシ96u−1とスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。そして、スリップリング周方向に隣接するブラシ96u−(m−1),96u−m間の気流も、気流制御板97u−mの捕捉面99u−mに沿って曲げられるため、スリップリング回転方向後側のブラシ96u−(m−1)とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−mの捕捉面99u−mに沿って移動することで、スリップリング回転方向前側のブラシ96u−mとスリップリング95uの摺動部に対してロータ回転軸方向の他方側にずれた位置に堆積する。同様に、スリップリング回転方向後側のブラシ96v,96wとスリップリング95v,95wの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97v,97wの捕捉面99v,99wに沿って移動して、スリップリング回転方向前側のブラシ96v,96wとスリップリング95v,95wの摺動部に対してロータ回転軸方向の他方側にずれた位置に堆積することで、スリップリング回転方向前側のブラシ96v,96wとスリップリング95v,95wの摺動部に噛み込んで再付着するのを防止することができる。
【0052】
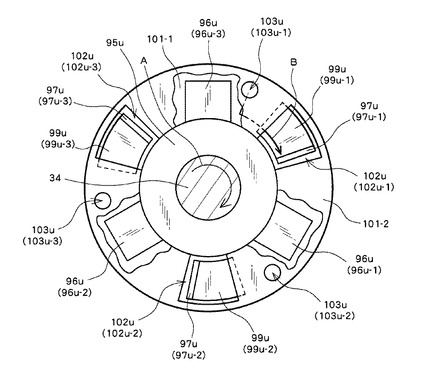
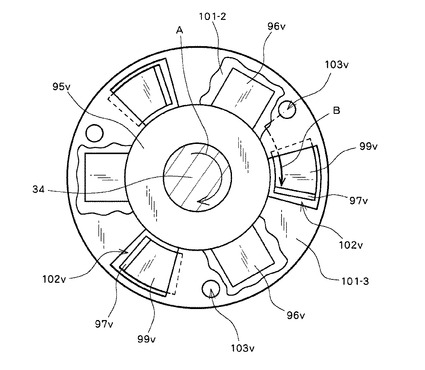
また、図11,12に示す構成例では、図9,10に示す構成例と比較して、スリップリング95uに対してロータ回転軸方向の他方側(図11の左側)に隣接する保持部材101−2には、ロータ回転軸方向の一方側(図11の右側)に隣接する気流制御板97u−1〜97u−3の捕捉面99u−1〜99u−3に臨んで、摩耗粉排出口102u−1〜102u−3がそれぞれ形成されている。同様に、スリップリング95vに対してロータ回転軸方向の他方側に隣接する保持部材101−3には、ロータ回転軸方向の一方側に隣接する気流制御板97vの捕捉面99vに臨んで摩耗粉排出口102vが形成され、スリップリング95wに対してロータ回転軸方向の他方側に隣接する保持部材101−4には、ロータ回転軸方向の一方側に隣接する気流制御板97wの捕捉面99wに臨んで摩耗粉排出口102wが形成されている。さらに、保持部材101−2には、通風口103u−1がスリップリング周方向に関してスリップリング回転方向後側のブラシ96u−3と摩耗粉排出口102u−1との間の位置に形成され、通風口103u−m(mは2または3)がスリップリング周方向に関してスリップリング回転方向後側のブラシ96u−(m−1)と摩耗粉排出口102u−mとの間の位置に形成されている。同様に、保持部材101−3には、通風口103vがスリップリング周方向に関してスリップリング回転方向後側のブラシ96vと摩耗粉排出口102vとの間の位置に形成され、保持部材101−4には、通風口103wがスリップリング周方向に関してスリップリング回転方向後側のブラシ96wと摩耗粉排出口102wとの間の位置に形成されている。図11,12に示す例では、スリップリング周方向に関する各摩耗粉排出口102u,102v,102wの位置は互いに一致しており、スリップリング周方向に関する各通風口103u,103v,103wの位置は互いに一致している。このように、ロータ回転軸方向に関して最も一方側(図11の右側)のスリップリング95uより他方側(図11の左側)に配置された保持部材101−2〜101−4には、摩耗粉排出口102u,102v,102wが、回転軸方向の一方側に隣接する気流制御板97u,97v,97wの捕捉面99u,99v,99wに臨んでそれぞれ形成され、通風口103u,103v,103wが、スリップリング周方向に関してスリップリング回転方向後側のブラシ96u,96v,96wと摩耗粉排出口102u,102v,102wとの間の位置にそれぞれ形成されている。
【0053】
図11,12に示す構成例によれば、スリップリング周方向に隣接するブラシ96u−3,96u−1間の気流については、図11,12の矢印Bに示すように、気流制御板97u−1の捕捉面99u−1に沿って曲げられることで、ロータ回転軸方向の他方側(摩耗粉排出口102u−1側)への速度成分が増加し、捕捉面99u−1に臨む摩耗粉排出口102u−1を通過する。その際には、図11,12の矢印Bに示すように、通風口103w,103v,103u−1を通って気流が導入される。そのため、スリップリング回転方向後側のブラシ96u−3とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−1の捕捉面99u−1に沿って移動して、摩耗粉排出口102u−1を通ってロータ回転軸方向の他方側へ排出される。これによって、スリップリング回転方向前側へ飛散した摩耗粉がスリップリング回転方向前側のブラシ96u−1とスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。そして、スリップリング周方向に隣接するブラシ96u−(m−1),96u−m間の気流も、気流制御板97u−mの捕捉面99u−mに沿って摩耗粉排出口102u−m側へ曲げられ、捕捉面99u−mに臨む摩耗粉排出口102u−mを通過するため、スリップリング回転方向後側のブラシ96u−(m−1)とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−mの捕捉面99u−mに沿って移動して、摩耗粉排出口102u−mを通ってロータ回転軸方向の他方側へ排出される。その際には、通風口103w,103v,103u−mを通って気流が導入される。同様に、スリップリング回転方向後側のブラシ96v,96wとスリップリング95v,95wの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97v,97wの捕捉面99v,99wに沿って移動して、捕捉面99v,99wに臨む摩耗粉排出口102v,102wを通ってロータ回転軸方向の他方側へ排出されることで、スリップリング回転方向前側のブラシ96v,96wとスリップリング95v,95wの摺動部に噛み込んで再付着するのを防止することができる。その際には、図11の矢印Bに示すように、通風口103w,103vを通って気流が導入される。
【0054】
また、図13〜16に示す構成例では、図11,12に示す構成例と比較して、各ブラシ96u,96v,96wがスリップリング周方向に関する位置を互いにずらして配置されている。より具体的には、ロータ回転軸方向に関して保持部材101−2を挟んで隣接するブラシ96u,96vのうち、一方側(図13の右側)に位置するブラシ96uが他方側(図13の左側)に位置するブラシ96vよりスリップリング回転方向後側に配置され、ロータ回転軸方向に関して保持部材101−3を挟んで隣接するブラシ96v,96wのうち、一方側に位置するブラシ96vが他方側に位置するブラシ96wよりスリップリング回転方向後側に配置されている。そして、各気流制御板97u,97v,97w(捕捉面99u,99v,99w)がスリップリング周方向に関する位置を互いにずらして配置され、各摩耗粉排出口102u,102v,102wもスリップリング周方向に関する位置を互いにずらして配置されている。より具体的には、ロータ回転軸方向に関して保持部材101−2を挟んで隣接する気流制御板97u,97v(捕捉面99u,99v)のうち、一方側に位置する気流制御板97u(捕捉面99u)が他方側に位置する気流制御板97v(捕捉面99v)よりスリップリング回転方向後側に配置され、ロータ回転軸方向に関して保持部材101−3を挟んで隣接する気流制御板97v,97w(捕捉面99v,99w)のうち、一方側に位置する気流制御板97v(捕捉面99v)が他方側に位置する気流制御板97w(捕捉面99w)よりスリップリング回転方向後側に配置されている。そして、各摩耗粉排出口102u,102v,102wが各捕捉面99u,99v,99wに臨んで配置されるように、摩耗粉排出口102uが摩耗粉排出口102vよりスリップリング回転方向後側に配置され、摩耗粉排出口102vが摩耗粉排出口102wよりスリップリング回転方向後側に配置されている。さらに、各通風口103u,103w,103vもスリップリング周方向に関する位置を互いにずらして配置されており、通風口103uが通風口103vよりスリップリング回転方向後側に配置され、通風口103vが通風口103wよりスリップリング回転方向後側に配置されている。このように、ブラシ96u,96v,96w、気流制御板97u,97v,97w(捕捉面99u,99v,99w)、摩耗粉排出口102u,102v,102w、及び通風口103u,103w,103vは、回転軸方向に関して他方側に配置されたものほど、スリップリング回転方向前側に配置されている。
【0055】
図13〜16に示す構成例によれば、スリップリング周方向に隣接するブラシ96u−3,96u−1間の気流については、図13,14の矢印Bに示すように、気流制御板97u−1の捕捉面99u−1に沿って摩耗粉排出口102u−1側へ曲げられることで、摩耗粉排出口102u−1を通過し、さらに、気流制御板97vの捕捉面99vに沿って流れる。そのため、スリップリング回転方向後側のブラシ96u−3とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−1の捕捉面99u−1に沿って移動して、摩耗粉排出口102u−1を通ってロータ回転軸方向の他方側へ排出され、さらに、保持部材101−2に対して回転軸方向の他方側に隣接する気流制御板97vの捕捉面99vで再捕捉される。これによって、スリップリング回転方向前側へ飛散した摩耗粉がスリップリング回転方向前側のブラシ96u−1とスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。そして、スリップリング周方向に隣接するブラシ96u−(m−1),96u−m間の気流も、気流制御板97u−mの捕捉面99u−mに沿って摩耗粉排出口102u−m側へ曲げられ、摩耗粉排出口102u−mを通過して気流制御板97vの捕捉面99vに沿って流れるため、スリップリング回転方向後側のブラシ96u−(m−1)とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−mの捕捉面99u−mに沿って移動して、摩耗粉排出口102u−mを通ってロータ回転軸方向の他方側へ排出され、気流制御板97vの捕捉面99vで再捕捉される。
【0056】
さらに、スリップリング回転方向後側のブラシ96vとスリップリング95vの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、図13,15の矢印Bに示すように、摩耗粉排出口102u−1〜102u−3のいずれかを通過した摩耗粉とともに、気流制御板97vの捕捉面99vに沿って移動して、摩耗粉排出口102vを通ってロータ回転軸方向の他方側へ排出され、保持部材101−3に対して回転軸方向の他方側に隣接する気流制御板97wの捕捉面99wで再捕捉される。さらに、スリップリング回転方向後側のブラシ96wとスリップリング95wの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、図13,16の矢印Bに示すように、摩耗粉排出口102vを通過した摩耗粉とともに、気流制御板97wの捕捉面99wに沿って移動して、摩耗粉排出口102wを通ってロータ回転軸方向の他方側(ブラシケース100外部)へ排出される。これによって、スリップリング回転方向前側へ飛散した摩耗粉がスリップリング回転方向前側のブラシ96v,96wとスリップリング95v,95wの摺動部に噛み込んで再付着するのを防止することができ、摩耗粉を効率よくブラシケース100外部へ排出することができる。
【0057】
本実施形態では、回転電機10の入力軸34と出力軸24とを入れ替えることもでき、第2ロータ18を入力軸34に機械的に連結し、第1ロータ28を出力軸24に機械的に連結することもできる。すなわち、第2ロータ18がエンジン36に機械的に連結され、第1ロータ28が車輪38に機械的に連結されていてもよい。この場合は、エンジン36からの動力が入力軸34に連結された第2ロータ18に伝達され、出力軸24に連結された第1ロータ28からの動力が車輪38に伝達されるため、第2ロータ18が入力側ロータとなり、第1ロータ28が出力側ロータとなる。
【0058】
また、本実施形態の構成は、ステータ16が省略され、ロータ巻線30が配設された第1ロータ28と第2ロータ18との間にトルクが作用する回転電機に対しても適用可能である。また、本実施形態の構成は、第2ロータ18が省略され、ステータ16とロータ巻線30が配設された第1ロータ28との間にトルクが作用する回転電機に対しても適用可能である。また、本実施形態の構成は、スリップリング95及びブラシ96を介してロータ巻線30に直流電流が流れる回転電機に対しても適用可能であり、その場合は、スリップリング95及びブラシ96がそれぞれ2つずつ設けられる。このように、本実施形態の構成は、回転子に回転子導体が配設され、スリップリング及びブラシを介して回転子導体に電流が流れる回転電機に対して適用可能である。
【0059】
以上、本発明を実施するための形態について説明したが、本発明はこうした実施形態に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【符号の説明】
【0060】
10 回転電機、16 ステータ、18 第2ロータ(出力側ロータ)、20 ステータ巻線、24 出力軸、28 第1ロータ(入力側ロータ)、30 ロータ巻線、32,33 永久磁石、34 入力軸、36 エンジン、37 駆動軸、38 車輪、40,41 インバータ、42 蓄電装置、44 変速機、48 クラッチ、50 電子制御ユニット、95(95u,95v,95w) スリップリング、96(96u−1,96u−2,96u−3,96v,96w) ブラシ、97u−1,97u−2,97u−3,97v,97w 気流制御板、99u−1,99u−2,99u−3,99v,99w 捕捉面、100 ブラシケース、101−1〜101−4 保持板、102u−1,102u−2,102u−3,102v,102w 摩耗粉排出口、103u−1,103u−2,103u−3,103v,103w 通風口。
【技術分野】
【0001】
本発明は、回転電機に関し、特に、回転子に回転子導体が配設され、スリップリング及びブラシを介して回転子導体に電流が流れる回転電機に関する。
【背景技術】
【0002】
この種の回転電機を備える動力伝達装置の関連技術が下記特許文献1に開示されている。特許文献1による動力伝達装置は、巻線が配設されエンジンに機械的に連結された第1ロータと、第1ロータの巻線と電磁気的に結合する磁石が配設され駆動軸に機械的に連結された第2ロータと、第2ロータの磁石と電磁気的に結合する巻線が配設されたステータと、第1ロータの巻線と電気的に接続されたスリップリングと、スリップリングと電気的に接触するブラシと、バッテリーとステータの巻線との間で電力を授受可能に制御する第1インバータと、スリップリング及びブラシを介してバッテリーと第1ロータの巻線との間で電力を授受可能に制御する第2インバータと、を備える。特許文献1においては、第1ロータに伝達されたエンジンからの動力は、第1ロータの巻線と第2ロータの磁石との電磁気結合によって第2ロータに伝達されるため、エンジンの動力により駆動軸を駆動することができる。さらに、第2インバータを介してバッテリーと第1ロータの巻線との間で電力の授受が可能になるため、第2インバータにより第1ロータの巻線の電力を制御することで、駆動軸の回転速度を制御することができる。その場合において、第1ロータの回転速度が第2ロータの回転速度よりも高いときは、第1ロータの巻線の発電電力が第2インバータを介してバッテリー側へ供給され、第1ロータの回転速度が第2ロータの回転速度よりも低いときは、バッテリーの電力が第2インバータを介して第1ロータの巻線に供給される。さらに、ステータの巻線と第2ロータの磁石との電磁気結合によって、バッテリー側から第1インバータを介してステータの巻線に供給された電力を用いて第2ロータに動力を発生させて駆動軸を駆動することができるため、第1インバータによりステータの巻線への電力供給を制御することで、駆動軸に伝達されるトルクを制御することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平9−56010号公報
【特許文献2】特開平9−182353号公報
【特許文献3】特開2009−73472号公報
【特許文献4】特開2009−274536号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1において、スリップリングとブラシの電気的接触を安定化させるためには、複数のブラシがスリップリングの外周面をそれぞれ異なる周方向位置で押圧することで、複数のブラシからスリップリングに作用する押圧力を平衡化させることが望ましい。ただし、スリップリングがブラシに対し摺動しながら回転する際には、スリップリングとブラシの摺動部に磨耗粉が発生し、摺動部に発生した磨耗粉が、スリップリングの回転に伴って発生する気流に乗ってスリップリング回転方向前側へ飛散する。スリップリング回転方向後側のブラシとスリップリングの摺動部に発生した磨耗粉が、スリップリングの回転に伴う気流に乗ってスリップリング回転方向前側へ飛散して、スリップリング回転方向前側のブラシとスリップリングの摺動部に噛み込んで再付着すると、ブラシやスリップリングに異常磨耗が発生しやすくなり、スリップリングとブラシの電気的接触不良を招きやすくなる。
【0005】
特許文献2の交流発電機においては、冷却ファンの回転に伴って発生する負圧によりスリップリングとブラシの摺動部に発生した磨耗粉の排出を図っている。しかし、吸入口である開口部は、スリップリングよりも大径の位置に大きな開口面積をもって配置されており、吸入抵抗が低いため、スリップリングの側を通過する空気量が少なくなり、磨耗粉の排出に十分な空気量を得ることが困難となる。また、冷却ファンの回転による損失が発生する。
【0006】
本発明は、スリップリングとブラシの摺動部に発生した磨耗粉の再付着によりブラシやスリップリングに異常磨耗が発生するのを防止することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係る回転電機は、上述した目的を達成するために以下の手段を採った。
【0008】
本発明に係る回転電機は、回転軸に取り付けられ、回転子導体が配設された回転子と、回転軸に取り付けられ、回転子導体に電気的に接続されたスリップリングと、スリップリング周方向に関して互いに間隔をおいて保持部材に保持された複数のブラシであって、その各々がスリップリングの外周面に電気的に接触する複数のブラシと、スリップリング周方向に関して互いに隣接するブラシ間の位置で保持部材に保持され、スリップリング回転方向後側のブラシとスリップリングの摺動部からスリップリング回転方向前側へ飛散した摩耗粉を捕捉面で捕捉してスリップリング回転方向前側のブラシとスリップリングの摺動部への付着を防止するための摩耗粉捕捉部材と、を備えることを要旨とする。
【0009】
本発明の一態様では、摩耗粉捕捉部材は、前記スリップリング回転方向後側のブラシより前記スリップリング回転方向前側のブラシに近い位置で保持部材に保持されていることが好適である。
【0010】
本発明の一態様では、摩耗粉捕捉部材は、前記スリップリング回転方向前側のブラシより前記スリップリング回転方向後側のブラシに近い位置で保持部材に保持されていることが好適である。
【0011】
本発明の一態様では、保持部材は、ブラシ及び摩耗粉捕捉部材より回転軸方向の一方側に配置され、摩耗粉捕捉部材の捕捉面は、回転軸方向に対してその一方側から他方側にかけてスリップリング回転方向へ傾斜していることが好適である。
【0012】
本発明の一態様では、複数のスリップリングが回転軸方向に関して互いに間隔をおいて回転軸に取り付けられ、前記複数のブラシと前記摩耗粉捕捉部材が各スリップリング毎に対応して設けられ、保持部材とスリップリングが回転軸方向に関してその一方側から他方側にかけて交互に配置され、各摩耗粉捕捉部材の捕捉面は、回転軸方向に対してその一方側から他方側にかけてスリップリング回転方向へ傾斜しており、回転軸方向に関して最も一方側のスリップリングより他方側に配置された保持部材には、当該保持部材に対して回転軸方向の一方側に隣接する摩耗粉捕捉部材の捕捉面で捕捉された摩耗粉を回転軸方向の他方側へ排出するための摩耗粉排出口が当該捕捉面に臨んで形成されていることが好適である。
【0013】
本発明の一態様では、回転軸方向に関して摩耗粉排出口の形成された保持部材を挟んで隣接する摩耗粉捕捉部材の一方側が他方側よりスリップリング回転方向後側に配置され、保持部材の摩耗粉排出口を通って回転軸方向の他方側へ排出された磨耗粉が、当該保持部材に対して回転軸方向の他方側に隣接する摩耗粉捕捉部材の捕捉面で捕捉されることが好適である。
【0014】
本発明の一態様では、回転軸方向に関して最も一方側のスリップリングより他方側に配置された保持部材には、通風口がスリップリング周方向に関して前記スリップリング回転方向後側のブラシと摩耗粉排出口との間の位置に形成されていることが好適である。
【0015】
本発明の一態様では、交流電流が流れることで回転磁界を発生可能な固定子導体が配設された固定子と、前記回転子導体が配設された回転子である第1回転子に対し相対回転可能であり、回転子導体に交流電流が流れることで発生した回転磁界が作用するのに応じて第1回転子との間にトルクが作用し、固定子導体で発生した回転磁界が作用するのに応じて固定子との間にトルクが作用する第2回転子と、をさらに備えることが好適である。
【発明の効果】
【0016】
本発明によれば、スリップリング回転方向後側のブラシとスリップリングの摺動部からスリップリング回転方向前側へ飛散した摩耗粉を、スリップリング周方向に関して互いに隣接するブラシ間の位置で保持された摩耗粉捕捉部材の捕捉面で捕捉して、スリップリング回転方向前側のブラシとスリップリングの摺動部への付着を防止することができるので、ブラシやスリップリングに異常磨耗が発生するのを防止することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施形態に係る回転電機を備えるハイブリッド駆動装置の概略構成を示す図である。
【図2】本発明の実施形態に係る回転電機の概略構成を示す図である。
【図3】本発明の実施形態に係る回転電機の概略構成を示す図である。
【図4】入力側ロータ28、出力側ロータ18、及びステータ16の構成例を示す図である。
【図5】本発明の実施形態に係る回転電機の概略構成を示す図である。
【図6】本発明の実施形態に係る回転電機の概略構成を示す図である。
【図7】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図8】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図9】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図10】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図11】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図12】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図13】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図14】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図15】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【図16】本発明の実施形態に係る回転電機の他の概略構成を示す図である。
【発明を実施するための形態】
【0018】
以下、本発明を実施するための形態(以下実施形態という)を図面に従って説明する。
【0019】
図1〜3は、本発明の実施形態に係る回転電機10を備えるハイブリッド駆動装置の構成の概略を示す図であり、図1は全体構成の概略を示し、図2,3は回転電機10の構成の概略を示す。本実施形態に係るハイブリッド駆動装置は、動力(機械的動力)を発生可能な原動機として設けられたエンジン(内燃機関)36と、エンジン36と駆動軸37(車輪38)との間に設けられ、変速比の変更が可能な変速機(機械式変速機)44と、エンジン36と変速機44との間に設けられ、動力(機械的動力)の発生及び発電が可能な回転電機10と、を備える。なお、本実施形態に係るハイブリッド駆動装置については、例えば車両を駆動するための動力出力装置として用いることができる。
【0020】
回転電機10は、ケースハウジングに固定されたステータ16と、ステータ16に対し相対回転可能な第1ロータ28と、ロータ回転軸と直交する径方向においてステータ16及び第1ロータ28と所定の空隙を空けて対向し、ステータ16及び第1ロータ28に対し相対回転可能な第2ロータ18と、スリップリング95及びブラシ96と、を有する。ステータ16は、第1ロータ28より径方向外側の位置に第1ロータ28と間隔を空けて配置されており、第2ロータ18は、径方向においてステータ16と第1ロータ28との間の位置に配置されている。つまり、第1ロータ28は第2ロータ18より径方向内側の位置で第2ロータ18と対向配置されており、ステータ16は第2ロータ18より径方向外側の位置で第2ロータ18と対向配置されている。第1ロータ28は回転電機10の入力軸34(第1回転軸)に取り付けられ、入力軸34はエンジン36と機械的に連結されていることで、入力軸34(第1ロータ28)にはエンジン36からの動力が伝達される。一方、第2ロータ18は回転電機10の出力軸24(第2回転軸)に取り付けられ、出力軸24は変速機44を介して駆動軸37と機械的に連結されていることで、駆動軸37(車輪38)には出力軸24(第2ロータ18)からの動力が変速機44で変速されてから伝達される。なお、以下の説明では、第1ロータ28を入力側ロータとし、第2ロータ18を出力側ロータとする。
【0021】
入力側ロータ28は、ロータコア(第1回転子鉄心)52と、ロータコア52にその周方向に沿って配設された複数相(例えば3相)のロータ巻線30と、を含む。複数相のロータ巻線30に複数相(例えば3相)の交流電流が流れることで、ロータ巻線30は、ロータ周方向に回転する回転磁界を発生することができる。
【0022】
ステータ16は、ステータコア(固定子鉄心)51と、ステータコア51にその周方向に沿って配設された複数相(例えば3相)のステータ巻線20と、を含む。複数相のステータ巻線20に複数相(例えば3相)の交流電流が流れることで、ステータ巻線20は、ステータ周方向に回転する回転磁界を発生することができる。
【0023】
出力側ロータ18は、ロータコア(第2回転子鉄心)53と、ロータコア53にその周方向に沿って配設され界磁束を発生する永久磁石32,33と、を含む。永久磁石32は、ロータコア53の外周部にステータ16(ステータコア51)と対向して配設されており、永久磁石33は、ロータコア53の内周部に入力側ロータ28(ロータコア52)と対向して配設されている。ここでは、永久磁石32,33を一体化することも可能である。
【0024】
入力側ロータ28、出力側ロータ18、及びステータ16のより詳細な構成例を図4に示す。図4に示す例では、入力側ロータ28、出力側ロータ18、及びステータ16が同心円状に配置されている。ステータ16のステータコア51には、径方向内側へ(出力側ロータ18へ向けて)突出した複数のティース51aがステータ周方向に沿って間隔をおいて配列されており、各ステータ巻線20がこれらのティース51aに巻回されていることで、磁極が構成される。入力側ロータ28のロータコア52には、径方向外側へ(出力側ロータ18へ向けて)突出した複数のティース52aがロータ周方向に沿って間隔をおいて配列されており、各ロータ巻線30がこれらのティース52aに巻回されていることで、磁極が構成される。ステータ16のティース51aと出力側ロータ18の永久磁石32とが出力側ロータ18の回転中心軸(入力側ロータ28の回転中心軸と一致する)に直交する径方向に対向配置されており、入力側ロータ28のティース52aと出力側ロータ18の永久磁石33とがこの径方向に対向配置されている。ステータ巻線20の巻回軸及びロータ巻線30の巻回軸は、この径方向(入力側ロータ28と出力側ロータ18が対向する方向)に一致している。永久磁石32,33はロータ周方向に間隔をおいて配列されており、さらに、永久磁石32はロータコア53内にV字状に埋設されている。ただし、永久磁石32,33については、出力側ロータ18の表面(外周面または内周面)に露出していてもよいし、出力側ロータ18内(ロータコア53内)に埋設されていてもよい。
【0025】
クラッチ48は、エンジン36と変速機44との間に、回転電機10(入力側ロータ28及び出力側ロータ18)に対し並列に設けられている。クラッチ48の係合/解放により、入力側ロータ28と出力側ロータ18との機械的係合/その解除を選択的に行うことが可能である。クラッチ48を係合させて、入力側ロータ28と出力側ロータ18とを機械的に係合させることで、入力側ロータ28と出力側ロータ18とが一体となって等しい回転速度で回転する。一方、クラッチ48を解放して、入力側ロータ28と出力側ロータ18との機械的係合を解除することで、入力側ロータ28と出力側ロータ18との回転速度差が許容される。ここでのクラッチ48は、例えば油圧や電磁力を利用して係合/解放を切り替えることが可能であり、さらに、クラッチ48に供給する油圧力や電磁力を調整することで締結力を調整することもできる。
【0026】
直流電源として設けられた充放電可能な蓄電装置42は、例えば二次電池により構成することができ、電気エネルギーを蓄える。インバータ40は、スイッチング素子と、スイッチング素子に対し逆並列接続されたダイオード(整流素子)とを備える公知の構成により実現可能であり、スイッチング素子のスイッチング動作により蓄電装置42からの直流電力を交流(例えば3相交流)に変換して、ステータ巻線20の各相に供給することが可能である。さらに、インバータ40は、ステータ巻線20の各相に流れる交流電流を直流に変換して、電気エネルギーを蓄電装置42に回収する方向の電力変換も可能である。このように、インバータ40は、蓄電装置42とステータ巻線20との間で双方向の電力変換を行うことが可能である。
【0027】
スリップリング95は、ロータ回転軸方向に関して入力側ロータ28と間隔をおいて入力軸34に取り付けられていることで、入力側ロータ28と機械的に連結されており、さらに、ロータ巻線30の各相と電気的に接続されている。回転が固定されたブラシ96は、スリップリング95に押し付けられて電気的に接触する。スリップリング95は、ブラシ96に対し摺動しながら(ブラシ96との電気的接触を維持しながら)、入力側ロータ28とともに回転する。ブラシ96は、インバータ41と電気的に接続されている。インバータ41は、スイッチング素子と、スイッチング素子に対し逆並列接続されたダイオード(整流素子)とを備える公知の構成により実現可能であり、スイッチング素子のスイッチング動作により蓄電装置42からの直流電力を交流(例えば3相交流)に変換して、ブラシ96及びスリップリング95を介してロータ巻線30の各相に供給することが可能である。さらに、インバータ41は、ロータ巻線30の各相に流れる交流電流を直流に変換する方向の電力変換も可能である。その際には、ロータ巻線30の交流電力がスリップリング95及びブラシ96により取り出され、この取り出された交流電力がインバータ41で直流に変換される。インバータ41で直流に変換された電力は、インバータ40で交流に変換されてからステータ巻線20の各相へ供給可能である。つまり、インバータ40は、インバータ41からの直流電力と蓄電装置42からの直流電力とのいずれか(少なくとも一方)を交流に変換してステータ巻線20の各相へ供給することが可能である。また、インバータ41で直流に変換された電力を蓄電装置42に回収することも可能である。このように、インバータ41は、蓄電装置42及びインバータ40のいずれかとロータ巻線30との間で双方向の電力変換を行うことが可能である。
【0028】
スリップリング95及びブラシ96のより詳細な構成例を図5,6に示す。図5,6に示す例では、ロータ巻線30の各相(u相、v相、w相)毎に対応して設けられた複数のスリップリング95u,95v,95wがロータ回転軸方向に関して互いに間隔をおいて(等間隔で)入力軸34に取り付けられ、各スリップリング95u,95v,95w毎に対応して設けられた複数のブラシ96u,96v,96wがブラシケース100内に収容されている。ブラシケース100は、ロータ回転軸方向に関して互いに間隔をおいて(等間隔で)配置された複数の電気絶縁性の保持板101−1〜101−4と、各保持板101−1〜101−4の外周に接合され、ブラシ96u,96v,96wの外周囲を取り囲む電気絶縁性の周壁102とを含んで構成される。保持板101−1〜101−4とスリップリング95u,95v,95wがロータ回転軸方向に関して交互に配置され、ロータ回転軸方向の一方側(図5の右側)から他方側(図5の左側)にかけて、保持板101−1、スリップリング95u、保持板101−2、スリップリング95v、保持板101−3、スリップリング95w、保持板101−4の順に配置されている。以下の説明において、複数(3つ)のブラシ96uを区別する必要があるときは、以降96u−1,96u−2,96u−3の符号を用いて説明する。
【0029】
図6に示すように、スリップリング95uの外周には、複数のブラシ96u−1〜96u−3がスリップリング周方向に関して互いに間隔をおいて(等間隔で)配列され、各ブラシ96u−1〜96u−3がスリップリング95uの外周面に電気的に接触する。ブラシ96u−1〜96u−3は、ロータ回転軸方向の一方側に隣接して配置された保持板101−1に保持されている。複数のブラシ96u−1〜96u−3がスリップリング95uの外周面をそれぞれ異なる周方向位置で押圧することで、複数のブラシ96u−1〜96u−3からスリップリング95uに作用する押圧力の平衡化を図ることが可能となり、スリップリング95uとブラシ96u−1〜96u−3との電気的接触を安定化させることが可能となる。同様に、スリップリング95vの外周には、複数のブラシ96vがスリップリング周方向に関して互いに間隔をおいて(等間隔で)配列され、各ブラシ96vがスリップリング95vの外周面に電気的に接触し、スリップリング95wの外周には、複数のブラシ96wがスリップリング周方向に関して互いに間隔をおいて(等間隔で)配列され、各ブラシ96wがスリップリング95wの外周面に電気的に接触する。ブラシ96vはロータ回転軸方向の一方側に隣接して配置された保持板101−2に保持され、ブラシ96wはロータ回転軸方向の一方側に隣接して配置された保持板101−3に保持されている。図5,6に示す例では、スリップリング周方向に関する各ブラシ96u,96v,96wの位置は互いに一致している。
【0030】
電子制御ユニット50は、インバータ40のスイッチング素子のスイッチング動作を制御してインバータ40での電力変換を制御することで、ステータ巻線20の各相に流れる交流電流を制御する。そして、電子制御ユニット50は、インバータ41のスイッチング素子のスイッチング動作を制御してインバータ41での電力変換を制御することで、ロータ巻線30の各相に流れる交流電流を制御する。そして、電子制御ユニット50は、クラッチ48の係合/解放を切り替えることで、入力側ロータ28と出力側ロータ18との機械的係合/その解除を切り替える制御も行う。さらに、電子制御ユニット50は、エンジン36の運転状態の制御、及び変速機44の変速比の制御も行う。
【0031】
インバータ40のスイッチング動作により複数相のステータ巻線20に複数相(例えば3相)の交流電流が流れることで、ステータ巻線20は、ステータ周方向に回転する回転磁界を発生する。そして、ステータ巻線20で発生した回転磁界と永久磁石32で発生した界磁束との電磁気相互作用(吸引及び反発作用)により、出力側ロータ18にトルク(磁石トルク)を作用させることができ、出力側ロータ18を回転駆動することができる。つまり、蓄電装置42からインバータ40を介してステータ巻線20に供給された電力を出力側ロータ18の動力(機械的動力)に変換することができ、ステータ16及び出力側ロータ18を同期電動機(PMモータ部)として機能させることができる。さらに、出力側ロータ18の動力をステータ巻線20の電力に変換してインバータ40を介して蓄電装置42に回収することも可能である。このように、ステータ16のステータ巻線20と出力側ロータ18の永久磁石32とが電磁気的に結合されていることで、ステータ巻線20で発生する回転磁界を出力側ロータ18に作用させて、ステータ16と出力側ロータ18との間にトルク(磁石トルク)を作用させることができる。さらに、例えば図4に示すように、永久磁石32間に突極部として磁性体(強磁性体)がステータ16(ティース51a)と対向して配置されている例や、永久磁石32が出力側ロータ18内(ロータコア53内)に埋設されている例では、ステータ16の発生する回転磁界が出力側ロータ18に作用するのに応じて、磁石トルクに加えてリラクタンストルクもステータ16と出力側ロータ18との間に作用する。電子制御ユニット50は、インバータ40のスイッチング動作により例えばステータ巻線20に流す交流電流の振幅や位相角を制御することで、ステータ16と出力側ロータ18との間に作用するトルクを制御することができる。
【0032】
また、入力側ロータ28が出力側ロータ18に対し相対回転して入力側ロータ28(ロータ巻線30)と出力側ロータ18(永久磁石33)との間に回転差が生じるのに伴ってロータ巻線30に誘導起電力が発生し、この誘導起電力に起因してロータ巻線30に誘導電流(交流電流)が流れることで回転磁界が生じる。そして、ロータ巻線30の誘導電流により生じる回転磁界と永久磁石33の界磁束との電磁気相互作用によっても、出力側ロータ18にトルクを作用させることができ、出力側ロータ18を回転駆動することができる。このように、入力側ロータ28のロータ巻線30と出力側ロータ18の永久磁石33とが電磁気的に結合されていることで、ロータ巻線30で発生する回転磁界が出力側ロータ18に作用するのに応じて、入力側ロータ28と出力側ロータ18との間にトルク(磁石トルク)が作用する。そのため、入力側ロータ28と出力側ロータ18との間で動力(機械的動力)を伝達することができ、入力側ロータ28及び出力側ロータ18を誘導電磁カップリング部として機能させることができる。
【0033】
ロータ巻線30の誘導電流により入力側ロータ28と出力側ロータ18との間にトルク(電磁カップリングトルク)を発生させる際には、電子制御ユニット50は、ロータ巻線30に誘導電流が流れるのを許容するように、インバータ41のスイッチング動作を行う。その際には、電子制御ユニット50は、インバータ41のスイッチング動作によりロータ巻線30に流れる交流電流を制御することで、入力側ロータ28と出力側ロータ18との間に作用する電磁カップリングトルクを制御することができる。一方、電子制御ユニット50は、インバータ41のスイッチング素子をオフ状態に維持してスイッチング動作を停止させることで、ロータ巻線30に誘導電流が流れなくなり、入力側ロータ28と出力側ロータ18との間にトルクは作用しなくなる。
【0034】
次に、本実施形態に係るハイブリッド駆動装置の動作について説明する。
【0035】
エンジン36が動力を発生している場合は、エンジン36の動力が入力側ロータ28に伝達され、入力側ロータ28がエンジン回転方向に回転駆動する。クラッチ48が解放されている状態で、入力側ロータ28の回転速度が出力側ロータ18の回転速度より高くなると、ロータ巻線30に誘導起電力が発生する。電子制御ユニット50は、ロータ巻線30に誘導電流が流れるのを許容するように、インバータ41のスイッチング動作を行う。これによって、ロータ巻線30の誘導電流と永久磁石33の界磁束との電磁気相互作用により入力側ロータ28から出力側ロータ18にエンジン回転方向の電磁カップリングトルクが作用して出力側ロータ18がエンジン回転方向に回転駆動する。このように、入力側ロータ28に伝達されたエンジン36からの動力は、入力側ロータ28のロータ巻線30と出力側ロータ18の永久磁石33との電磁気結合によって、出力側ロータ18へ伝達される。出力側ロータ18に伝達された動力は、変速機44で変速されてから駆動軸37(車輪38)へ伝達されることで、車両の前進駆動等、負荷の正転駆動に用いられる。したがって、エンジン36の動力を用いて車輪38を正転方向に回転駆動することができ、車両を前進方向に駆動することができる。さらに、入力側ロータ28と出力側ロータ18との回転差を許容することができるため、車輪38の回転が停止してもエンジン36がストールすることはない。そのため、回転電機10を発進装置として機能させることができ、摩擦クラッチやトルクコンバータ等の発進装置を別に設ける必要がなくなる。
【0036】
さらに、ロータ巻線30に発生した交流電力は、スリップリング95及びブラシ96を介して取り出される。取り出された交流電力はインバータ41で直流に変換される。そして、インバータ40のスイッチング動作により、インバータ41からの直流電力がインバータ40で交流に変換されてからステータ巻線20に供給されることで、ステータ巻線20に交流電流が流れ、ステータ16に回転磁界が形成される。このステータ16の回転磁界と出力側ロータ18の永久磁石32の界磁束との電磁気相互作用によっても、出力側ロータ18にエンジン回転方向のトルクを作用させることができる。これによって、出力側ロータ18のエンジン回転方向のトルクを増幅させるトルク増幅機能を実現することができる。また、インバータ41からの直流電力を蓄電装置42に回収することも可能である。
【0037】
さらに、蓄電装置42からステータ巻線20へ電力供給するようにインバータ40のスイッチング動作を制御することで、エンジン36の動力を用いて車輪38を正転方向に回転駆動するとともに、ステータ巻線20への供給電力を用いて発生させた出力側ロータ18の動力により車輪38の正転方向の回転駆動をアシストすることができる。また、負荷の減速運転時には、電子制御ユニット50は、ステータ巻線20から蓄電装置42へ電力回収するようにインバータ40のスイッチング動作を制御することで、負荷の動力をステータ巻線20と永久磁石32との電磁気結合によってステータ巻線20の電力に変換して蓄電装置42に回収することができる。
【0038】
また、クラッチ48を係合して入力側ロータ28と出力側ロータ18とを機械的に連結することで、ロータ巻線30に交流電流が流れず入力側ロータ28と出力側ロータ18との間にトルクが作用しなくても、エンジン36からの動力をクラッチ48を介して駆動軸37(車輪38)へ伝達することができる。これによって、入力側ロータ28と出力側ロータ18との間のすべりに伴ってロータ巻線30に誘導電流が流れることで生じるジュール損失を抑えることが可能となる。
【0039】
また、エンジン36の動力を用いずに回転電機10の動力を用いて負荷を駆動する(車輪38を回転駆動する)EV(Electric Vehicle)走行を行う場合は、電子制御ユニット50は、インバータ40のスイッチング動作を制御することで、負荷の駆動制御を行う。例えば、電子制御ユニット50は、蓄電装置42からの直流電力を交流に変換してステータ巻線20へ供給するように、インバータ40のスイッチング動作を制御することで、ステータ巻線20への供給電力をステータ巻線20と永久磁石32との電磁気結合によって出力側ロータ18の動力に変換し、駆動軸37(車輪38)を回転駆動する。このように、エンジン36が動力を発生していなくても、ステータ巻線20への電力供給により車輪38を回転駆動することができる。なお、EV走行を行う場合は、クラッチ48を解放状態に制御する。
【0040】
また、エンジン36を始動する場合は、電子制御ユニット50は、蓄電装置42からの直流電力をインバータ41で交流に変換してスリップリング95及びブラシ96を介してロータ巻線30へ供給するように、インバータ41のスイッチング動作を制御することで、ロータ巻線30への供給電力を用いてエンジン36のクランキングを行うことができる。エンジン36のクランキングの際には、入力側ロータ28の回転磁界と出力側ロータ18の永久磁石33の界磁束との電磁気相互作用によりエンジン36に繋がる入力側ロータ28にトルクを作用させるが、出力側ロータ18もその反力トルクを受けることになる。そのため、EV走行時にエンジン36を始動する場合は、蓄電装置42からステータ巻線20へ電力供給して出力側ロータ18にこの反力トルクを打ち消すトルクを作用させるようにインバータ40のスイッチング動作を制御することで、ステータ巻線20への供給電力を用いて出力側ロータ18を回転駆動することができる。なお、エンジン36を始動する場合は、クラッチ48を解放状態に制御する。
【0041】
本実施形態において、エンジン36の動力を車輪38へ伝達する際には、スリップリング95u,95v,95wがブラシ96u,96v,96wに対し摺動しながら回転することで、スリップリング95u,95v,95wとブラシ96u,96v,96wの摺動部に磨耗粉が発生する。摺動部に発生した磨耗粉は、スリップリング95u,95v,95wの回転に伴って発生する気流に乗ってスリップリング回転方向前側へ飛散する(入力軸34及びスリップリング95u,95v,95wの回転方向を図6の矢印Aに示す)。図5,6に示す構成例において、スリップリング回転方向後側のブラシ(例えばブラシ96u−1)とスリップリング95uの摺動部に発生した磨耗粉が、スリップリング95uの回転に伴う気流に乗ってスリップリング回転方向前側へ飛散して、スリップリング回転方向前側のブラシ(例えばブラシ96u−2)とスリップリング95uの摺動部に噛み込んで再付着すると、ブラシ96u−2やスリップリング95uに異常磨耗が発生しやすくなり、ブラシ96u−2とスリップリング95uの電気的接触不良を招きやすくなる。
【0042】
これに対して本実施形態では、スリップリング95u,95v,95wとブラシ96u,96v,96wの摺動部からスリップリング回転方向前側へ飛散した摩耗粉を捕捉するための摩耗粉捕捉部材として、複数の電気絶縁性の気流制御板97u,97v,97wが設けられている。以下の説明において、複数(3つ)の気流制御板97uを区別する必要があるときは、以降97u−1,97u−2,97u−3の符号を用いて説明する。図5,6に示すように、気流制御板97u−1は、スリップリング周方向に関して互いに隣接するブラシ96u−3,96u−1間の位置で保持板101−1に保持され、気流制御板97u−m(mは2または3)は、スリップリング周方向に関して互いに隣接するブラシ96u−(m−1),96u−m間の位置で保持板101−1に保持されている。図5,6に示す例では、気流制御板97u−1は、スリップリング周方向に隣接するブラシ96u−3,96u−1のうち、スリップリング回転方向後側のブラシ96u−3よりスリップリング回転方向前側のブラシ96u−1に近い位置で保持板101−1に保持され、気流制御板97u−mは、スリップリング周方向に隣接するブラシ96u−(m−1),96u−mのうち、スリップリング回転方向後側のブラシ96u−(m−1)よりスリップリング回転方向前側のブラシ96u−mに近い位置で保持板101−1に保持されている。各気流制御板97u−1〜97u−3(スリップリング回転方向後側の捕捉面99u−1〜99u−3)は、径方向の両端部より中央部がスリップリング回転方向前側へ窪んだ状態で湾曲して形成されている。各気流制御板97u−1〜97u−3の径方向内側の端部は、スリップリング95uの外周面と接触しない程度の微小空隙をあけてスリップリング95uの外周面に近接配置されている。図5,6に示す例では、ブラシ96u及び気流制御板97uの個数がそれぞれ3つであるが、ブラシ96u及び気流制御板97uの個数は任意に設定することが可能である。
【0043】
同様に、気流制御板97vがスリップリング周方向に関して互いに隣接するブラシ96v間の位置(スリップリング回転方向前側に隣接するブラシ96vに近い位置)で保持板101−2に保持され、気流制御板97wがスリップリング周方向に関して互いに隣接するブラシ96w間の位置(スリップリング回転方向前側に隣接するブラシ96wに近い位置)で保持板101−3に保持されている。そして、各気流制御板97v,97w(スリップリング回転方向後側の捕捉面99v,99w)は、径方向の両端部より中央部がスリップリング回転方向前側へ窪んだ状態で湾曲して形成され、各気流制御板97v,97wの径方向内側の端部は、スリップリング95v,95wの外周面と接触しない程度の微小空隙をあけてスリップリング95v,95wの外周面に近接配置されている。図5,6に示す例では、スリップリング周方向に関する各気流制御板97u,97v,97wの位置は互いに一致している。
【0044】
図5,6に示す構成例では、スリップリング95uの外周囲には、スリップリング95uの回転に伴って気流が発生するが、スリップリング周方向に隣接するブラシ96u−3,96u−1間の気流については、図6の矢印Bに示すように、スリップリング回転方向の速度成分が気流制御板97u−1により妨げられ、捕捉面99u−1に沿って曲げられることで、径方向外側への速度成分が増加する。そのため、スリップリング回転方向後側のブラシ96u−3とスリップリング95uの摺動部に発生した摩耗粉は、気流に乗ってスリップリング回転方向前側へ飛散するが、気流制御板97u−1によりスリップリング回転方向前側への飛散が妨げられ、捕捉面99u−1で捕捉される。これによって、スリップリング回転方向後側のブラシ96u−3とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉が、スリップリング回転方向前側のブラシ96u−1とスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。そして、スリップリング周方向に隣接するブラシ96u−(m−1),96u−m間の気流についても、スリップリング回転方向の速度成分が気流制御板97u−mにより妨げられ、捕捉面99u−mに沿って曲げられることで、径方向外側への速度成分が増加する。そのため、スリップリング回転方向後側のブラシ96u−(m−1)とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−mによりスリップリング回転方向前側への飛散が妨げられ、捕捉面99u−mで捕捉されることで、スリップリング回転方向前側のブラシ96u−mとスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。
【0045】
したがって、本実施形態によれば、ブラシ96uとスリップリング95uの異常磨耗を防止することができるとともに、ブラシ96uとスリップリング95uの電気的接触不良を防止することができる。その結果、ブラシ96uとスリップリング95uの磨耗量を低減することができ、ブラシ96uとスリップリング95uの耐久性を向上させることができる。さらに、気流制御板97uにより気流を制御することで、ブラシ96uとスリップリング95uの冷却効果も得ることができる。なお、スリップリング回転方向前側のブラシ(例えばブラシ96u−m)とスリップリング95uの摺動部への摩耗粉の再付着をより確実に防止するためには、気流制御板97u−mをブラシ96u−mのスリップリング回転方向後側に極力近接させて配置することが好ましい。
【0046】
同様に、スリップリング回転方向後側のブラシ96v,96wとスリップリング95v,95wの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97v,97wによりスリップリング回転方向前側への飛散が妨げられ、捕捉面99v,99wで捕捉されることで、スリップリング回転方向前側のブラシ96v,96wとスリップリング95v,95wの摺動部に噛み込んで再付着するのを防止することができる。なお、気流制御板97v,97wについても、スリップリング回転方向前側のブラシ96v,96wとスリップリング95v,95wの摺動部への摩耗粉の再付着をより確実に防止するためには、スリップリング回転方向前側に隣接するブラシ96v,96wに極力近接させて配置することが好ましい。
【0047】
次に、本実施形態の他の構成例について説明する。
【0048】
図7,8に示す構成例では、図5,6に示す構成例と比較して、気流制御板97u−1は、スリップリング周方向に隣接するブラシ96u−3,96u−1のうち、スリップリング回転方向前側のブラシ96u−1よりスリップリング回転方向後側のブラシ96u−3に近い位置で保持板101−1に保持され、気流制御板97u−m(mは2または3)は、スリップリング周方向に隣接するブラシ96u−(m−1),96u−mのうち、スリップリング回転方向前側のブラシ96u−mよりスリップリング回転方向後側のブラシ96u−(m−1)に近い位置で保持板101−1に保持されている。同様に、気流制御板97vがスリップリング回転方向後側に隣接するブラシ96vに近い位置で保持板101−2に保持され、気流制御板97wがスリップリング回転方向後側に隣接するブラシ96wに近い位置で保持板101−3に保持されている。図7,8に示す例でも、スリップリング周方向に関する各気流制御板97u,97v,97wの位置は互いに一致している。
【0049】
図7,8に示す構成例でも、スリップリング周方向に隣接するブラシ96u−3,96u−1間の気流については、図8の矢印Bに示すように、スリップリング回転方向の速度成分が気流制御板97u−1により妨げられ、捕捉面99u−1に沿って曲げられることで、径方向外側への速度成分が増加する。そのため、スリップリング回転方向後側のブラシ96u−3とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−1によりスリップリング回転方向前側への飛散が妨げられ、捕捉面99u−1で捕捉されることで、スリップリング回転方向前側のブラシ96u−1とスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。そして、スリップリング周方向に隣接するブラシ96u−(m−1),96u−m間の気流についても、スリップリング回転方向の速度成分が気流制御板97u−mにより妨げられるため、スリップリング回転方向後側のブラシ96u−(m−1)とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−mによりスリップリング回転方向前側への飛散が妨げられ、捕捉面99u−mで捕捉されることで、スリップリング回転方向前側のブラシ96u−mとスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。同様に、スリップリング回転方向後側のブラシ96v,96wとスリップリング95v,95wの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97v,97wによりスリップリング回転方向前側への飛散が妨げられ、捕捉面99v,99wで捕捉されることで、スリップリング回転方向前側のブラシ96v,96wとスリップリング95v,95wの摺動部に噛み込んで再付着するのを防止することができる。なお、スリップリング回転方向後側のブラシ(例えばブラシ96u−(m−1))とスリップリング95uの摺動部から飛散した摩耗粉をより確実に捕捉するためには、気流制御板97u−mをブラシ96u−(m−1)のスリップリング回転方向前側に極力近接させて配置することが好ましく、気流制御板97v,97wについても、スリップリング回転方向後側のブラシ96v,96wとスリップリング95v,95wの摺動部から飛散した摩耗粉をより確実に捕捉するためには、スリップリング回転方向後側に隣接するブラシ96v,96wに極力近接させて配置することが好ましい。
【0050】
また、図9,10に示す構成例では、図5,6に示す構成例と比較して、各気流制御板97u−1〜97u−3(捕捉面99u−1〜99u−3)は、ロータ回転軸方向に対してその一方側(図9の右側)から他方側(図9の左側)にかけてスリップリング回転方向へ傾斜して形成されている。同様に、各気流制御板97v,97w(捕捉面99v,99w)も、ロータ回転軸方向に対してその一方側から他方側にかけてスリップリング回転方向へ傾斜して形成されている。図9,10に示す例では、スリップリング周方向に関する各気流制御板97u,97v,97wの位置は互いに一致しており、各気流制御板97u,97v,97w(捕捉面99u,99v,99w)のロータ回転軸方向に対する傾斜角度は互いに等しい。気流制御板(例えば気流制御板97u−m)については、スリップリング回転方向後側のブラシ96u−(m−1)よりスリップリング回転方向前側のブラシ96u−mに近い位置に配置することも可能であるし、スリップリング回転方向前側のブラシ96u−mよりスリップリング回転方向後側のブラシ96u−(m−1)に近い位置に配置することも可能である(気流制御板97v,97wについても同様である)。
【0051】
図9,10に示す構成例によれば、スリップリング周方向に隣接するブラシ96u−3,96u−1間の気流については、図9,10の矢印Bに示すように、スリップリング回転方向の速度成分が気流制御板97u−1により妨げられ、捕捉面99u−1に沿って曲げられることで、ロータ回転軸方向の他方側への速度成分が増加する。そのため、スリップリング回転方向後側のブラシ96u−3とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−1の捕捉面99u−1によりスリップリング回転方向前側への飛散が妨げられて捕捉され、捕捉面99u−1に沿って移動することで、スリップリング回転方向前側のブラシ96u−1とスリップリング95uの摺動部に対してロータ回転軸方向の他方側にずれた位置に堆積する。これによって、スリップリング回転方向前側へ飛散した摩耗粉がスリップリング回転方向前側のブラシ96u−1とスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。そして、スリップリング周方向に隣接するブラシ96u−(m−1),96u−m間の気流も、気流制御板97u−mの捕捉面99u−mに沿って曲げられるため、スリップリング回転方向後側のブラシ96u−(m−1)とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−mの捕捉面99u−mに沿って移動することで、スリップリング回転方向前側のブラシ96u−mとスリップリング95uの摺動部に対してロータ回転軸方向の他方側にずれた位置に堆積する。同様に、スリップリング回転方向後側のブラシ96v,96wとスリップリング95v,95wの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97v,97wの捕捉面99v,99wに沿って移動して、スリップリング回転方向前側のブラシ96v,96wとスリップリング95v,95wの摺動部に対してロータ回転軸方向の他方側にずれた位置に堆積することで、スリップリング回転方向前側のブラシ96v,96wとスリップリング95v,95wの摺動部に噛み込んで再付着するのを防止することができる。
【0052】
また、図11,12に示す構成例では、図9,10に示す構成例と比較して、スリップリング95uに対してロータ回転軸方向の他方側(図11の左側)に隣接する保持部材101−2には、ロータ回転軸方向の一方側(図11の右側)に隣接する気流制御板97u−1〜97u−3の捕捉面99u−1〜99u−3に臨んで、摩耗粉排出口102u−1〜102u−3がそれぞれ形成されている。同様に、スリップリング95vに対してロータ回転軸方向の他方側に隣接する保持部材101−3には、ロータ回転軸方向の一方側に隣接する気流制御板97vの捕捉面99vに臨んで摩耗粉排出口102vが形成され、スリップリング95wに対してロータ回転軸方向の他方側に隣接する保持部材101−4には、ロータ回転軸方向の一方側に隣接する気流制御板97wの捕捉面99wに臨んで摩耗粉排出口102wが形成されている。さらに、保持部材101−2には、通風口103u−1がスリップリング周方向に関してスリップリング回転方向後側のブラシ96u−3と摩耗粉排出口102u−1との間の位置に形成され、通風口103u−m(mは2または3)がスリップリング周方向に関してスリップリング回転方向後側のブラシ96u−(m−1)と摩耗粉排出口102u−mとの間の位置に形成されている。同様に、保持部材101−3には、通風口103vがスリップリング周方向に関してスリップリング回転方向後側のブラシ96vと摩耗粉排出口102vとの間の位置に形成され、保持部材101−4には、通風口103wがスリップリング周方向に関してスリップリング回転方向後側のブラシ96wと摩耗粉排出口102wとの間の位置に形成されている。図11,12に示す例では、スリップリング周方向に関する各摩耗粉排出口102u,102v,102wの位置は互いに一致しており、スリップリング周方向に関する各通風口103u,103v,103wの位置は互いに一致している。このように、ロータ回転軸方向に関して最も一方側(図11の右側)のスリップリング95uより他方側(図11の左側)に配置された保持部材101−2〜101−4には、摩耗粉排出口102u,102v,102wが、回転軸方向の一方側に隣接する気流制御板97u,97v,97wの捕捉面99u,99v,99wに臨んでそれぞれ形成され、通風口103u,103v,103wが、スリップリング周方向に関してスリップリング回転方向後側のブラシ96u,96v,96wと摩耗粉排出口102u,102v,102wとの間の位置にそれぞれ形成されている。
【0053】
図11,12に示す構成例によれば、スリップリング周方向に隣接するブラシ96u−3,96u−1間の気流については、図11,12の矢印Bに示すように、気流制御板97u−1の捕捉面99u−1に沿って曲げられることで、ロータ回転軸方向の他方側(摩耗粉排出口102u−1側)への速度成分が増加し、捕捉面99u−1に臨む摩耗粉排出口102u−1を通過する。その際には、図11,12の矢印Bに示すように、通風口103w,103v,103u−1を通って気流が導入される。そのため、スリップリング回転方向後側のブラシ96u−3とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−1の捕捉面99u−1に沿って移動して、摩耗粉排出口102u−1を通ってロータ回転軸方向の他方側へ排出される。これによって、スリップリング回転方向前側へ飛散した摩耗粉がスリップリング回転方向前側のブラシ96u−1とスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。そして、スリップリング周方向に隣接するブラシ96u−(m−1),96u−m間の気流も、気流制御板97u−mの捕捉面99u−mに沿って摩耗粉排出口102u−m側へ曲げられ、捕捉面99u−mに臨む摩耗粉排出口102u−mを通過するため、スリップリング回転方向後側のブラシ96u−(m−1)とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−mの捕捉面99u−mに沿って移動して、摩耗粉排出口102u−mを通ってロータ回転軸方向の他方側へ排出される。その際には、通風口103w,103v,103u−mを通って気流が導入される。同様に、スリップリング回転方向後側のブラシ96v,96wとスリップリング95v,95wの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97v,97wの捕捉面99v,99wに沿って移動して、捕捉面99v,99wに臨む摩耗粉排出口102v,102wを通ってロータ回転軸方向の他方側へ排出されることで、スリップリング回転方向前側のブラシ96v,96wとスリップリング95v,95wの摺動部に噛み込んで再付着するのを防止することができる。その際には、図11の矢印Bに示すように、通風口103w,103vを通って気流が導入される。
【0054】
また、図13〜16に示す構成例では、図11,12に示す構成例と比較して、各ブラシ96u,96v,96wがスリップリング周方向に関する位置を互いにずらして配置されている。より具体的には、ロータ回転軸方向に関して保持部材101−2を挟んで隣接するブラシ96u,96vのうち、一方側(図13の右側)に位置するブラシ96uが他方側(図13の左側)に位置するブラシ96vよりスリップリング回転方向後側に配置され、ロータ回転軸方向に関して保持部材101−3を挟んで隣接するブラシ96v,96wのうち、一方側に位置するブラシ96vが他方側に位置するブラシ96wよりスリップリング回転方向後側に配置されている。そして、各気流制御板97u,97v,97w(捕捉面99u,99v,99w)がスリップリング周方向に関する位置を互いにずらして配置され、各摩耗粉排出口102u,102v,102wもスリップリング周方向に関する位置を互いにずらして配置されている。より具体的には、ロータ回転軸方向に関して保持部材101−2を挟んで隣接する気流制御板97u,97v(捕捉面99u,99v)のうち、一方側に位置する気流制御板97u(捕捉面99u)が他方側に位置する気流制御板97v(捕捉面99v)よりスリップリング回転方向後側に配置され、ロータ回転軸方向に関して保持部材101−3を挟んで隣接する気流制御板97v,97w(捕捉面99v,99w)のうち、一方側に位置する気流制御板97v(捕捉面99v)が他方側に位置する気流制御板97w(捕捉面99w)よりスリップリング回転方向後側に配置されている。そして、各摩耗粉排出口102u,102v,102wが各捕捉面99u,99v,99wに臨んで配置されるように、摩耗粉排出口102uが摩耗粉排出口102vよりスリップリング回転方向後側に配置され、摩耗粉排出口102vが摩耗粉排出口102wよりスリップリング回転方向後側に配置されている。さらに、各通風口103u,103w,103vもスリップリング周方向に関する位置を互いにずらして配置されており、通風口103uが通風口103vよりスリップリング回転方向後側に配置され、通風口103vが通風口103wよりスリップリング回転方向後側に配置されている。このように、ブラシ96u,96v,96w、気流制御板97u,97v,97w(捕捉面99u,99v,99w)、摩耗粉排出口102u,102v,102w、及び通風口103u,103w,103vは、回転軸方向に関して他方側に配置されたものほど、スリップリング回転方向前側に配置されている。
【0055】
図13〜16に示す構成例によれば、スリップリング周方向に隣接するブラシ96u−3,96u−1間の気流については、図13,14の矢印Bに示すように、気流制御板97u−1の捕捉面99u−1に沿って摩耗粉排出口102u−1側へ曲げられることで、摩耗粉排出口102u−1を通過し、さらに、気流制御板97vの捕捉面99vに沿って流れる。そのため、スリップリング回転方向後側のブラシ96u−3とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−1の捕捉面99u−1に沿って移動して、摩耗粉排出口102u−1を通ってロータ回転軸方向の他方側へ排出され、さらに、保持部材101−2に対して回転軸方向の他方側に隣接する気流制御板97vの捕捉面99vで再捕捉される。これによって、スリップリング回転方向前側へ飛散した摩耗粉がスリップリング回転方向前側のブラシ96u−1とスリップリング95uの摺動部に噛み込んで再付着するのを防止することができる。そして、スリップリング周方向に隣接するブラシ96u−(m−1),96u−m間の気流も、気流制御板97u−mの捕捉面99u−mに沿って摩耗粉排出口102u−m側へ曲げられ、摩耗粉排出口102u−mを通過して気流制御板97vの捕捉面99vに沿って流れるため、スリップリング回転方向後側のブラシ96u−(m−1)とスリップリング95uの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、気流制御板97u−mの捕捉面99u−mに沿って移動して、摩耗粉排出口102u−mを通ってロータ回転軸方向の他方側へ排出され、気流制御板97vの捕捉面99vで再捕捉される。
【0056】
さらに、スリップリング回転方向後側のブラシ96vとスリップリング95vの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、図13,15の矢印Bに示すように、摩耗粉排出口102u−1〜102u−3のいずれかを通過した摩耗粉とともに、気流制御板97vの捕捉面99vに沿って移動して、摩耗粉排出口102vを通ってロータ回転軸方向の他方側へ排出され、保持部材101−3に対して回転軸方向の他方側に隣接する気流制御板97wの捕捉面99wで再捕捉される。さらに、スリップリング回転方向後側のブラシ96wとスリップリング95wの摺動部から気流に乗ってスリップリング回転方向前側へ飛散した摩耗粉は、図13,16の矢印Bに示すように、摩耗粉排出口102vを通過した摩耗粉とともに、気流制御板97wの捕捉面99wに沿って移動して、摩耗粉排出口102wを通ってロータ回転軸方向の他方側(ブラシケース100外部)へ排出される。これによって、スリップリング回転方向前側へ飛散した摩耗粉がスリップリング回転方向前側のブラシ96v,96wとスリップリング95v,95wの摺動部に噛み込んで再付着するのを防止することができ、摩耗粉を効率よくブラシケース100外部へ排出することができる。
【0057】
本実施形態では、回転電機10の入力軸34と出力軸24とを入れ替えることもでき、第2ロータ18を入力軸34に機械的に連結し、第1ロータ28を出力軸24に機械的に連結することもできる。すなわち、第2ロータ18がエンジン36に機械的に連結され、第1ロータ28が車輪38に機械的に連結されていてもよい。この場合は、エンジン36からの動力が入力軸34に連結された第2ロータ18に伝達され、出力軸24に連結された第1ロータ28からの動力が車輪38に伝達されるため、第2ロータ18が入力側ロータとなり、第1ロータ28が出力側ロータとなる。
【0058】
また、本実施形態の構成は、ステータ16が省略され、ロータ巻線30が配設された第1ロータ28と第2ロータ18との間にトルクが作用する回転電機に対しても適用可能である。また、本実施形態の構成は、第2ロータ18が省略され、ステータ16とロータ巻線30が配設された第1ロータ28との間にトルクが作用する回転電機に対しても適用可能である。また、本実施形態の構成は、スリップリング95及びブラシ96を介してロータ巻線30に直流電流が流れる回転電機に対しても適用可能であり、その場合は、スリップリング95及びブラシ96がそれぞれ2つずつ設けられる。このように、本実施形態の構成は、回転子に回転子導体が配設され、スリップリング及びブラシを介して回転子導体に電流が流れる回転電機に対して適用可能である。
【0059】
以上、本発明を実施するための形態について説明したが、本発明はこうした実施形態に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【符号の説明】
【0060】
10 回転電機、16 ステータ、18 第2ロータ(出力側ロータ)、20 ステータ巻線、24 出力軸、28 第1ロータ(入力側ロータ)、30 ロータ巻線、32,33 永久磁石、34 入力軸、36 エンジン、37 駆動軸、38 車輪、40,41 インバータ、42 蓄電装置、44 変速機、48 クラッチ、50 電子制御ユニット、95(95u,95v,95w) スリップリング、96(96u−1,96u−2,96u−3,96v,96w) ブラシ、97u−1,97u−2,97u−3,97v,97w 気流制御板、99u−1,99u−2,99u−3,99v,99w 捕捉面、100 ブラシケース、101−1〜101−4 保持板、102u−1,102u−2,102u−3,102v,102w 摩耗粉排出口、103u−1,103u−2,103u−3,103v,103w 通風口。
【特許請求の範囲】
【請求項1】
回転軸に取り付けられ、回転子導体が配設された回転子と、
回転軸に取り付けられ、回転子導体に電気的に接続されたスリップリングと、
スリップリング周方向に関して互いに間隔をおいて保持部材に保持された複数のブラシであって、その各々がスリップリングの外周面に電気的に接触する複数のブラシと、
スリップリング周方向に関して互いに隣接するブラシ間の位置で保持部材に保持され、スリップリング回転方向後側のブラシとスリップリングの摺動部からスリップリング回転方向前側へ飛散した摩耗粉を捕捉面で捕捉してスリップリング回転方向前側のブラシとスリップリングの摺動部への付着を防止するための摩耗粉捕捉部材と、
を備える、回転電機。
【請求項2】
請求項1に記載の回転電機であって、
摩耗粉捕捉部材は、前記スリップリング回転方向後側のブラシより前記スリップリング回転方向前側のブラシに近い位置で保持部材に保持されている、回転電機。
【請求項3】
請求項1に記載の回転電機であって、
摩耗粉捕捉部材は、前記スリップリング回転方向前側のブラシより前記スリップリング回転方向後側のブラシに近い位置で保持部材に保持されている、回転電機。
【請求項4】
請求項1〜3のいずれか1に記載の回転電機であって、
保持部材は、ブラシ及び摩耗粉捕捉部材より回転軸方向の一方側に配置され、
摩耗粉捕捉部材の捕捉面は、回転軸方向に対してその一方側から他方側にかけてスリップリング回転方向へ傾斜している、回転電機。
【請求項5】
請求項1〜3のいずれか1に記載の回転電機であって、
複数のスリップリングが回転軸方向に関して互いに間隔をおいて回転軸に取り付けられ、
前記複数のブラシと前記摩耗粉捕捉部材が各スリップリング毎に対応して設けられ、
保持部材とスリップリングが回転軸方向に関してその一方側から他方側にかけて交互に配置され、
各摩耗粉捕捉部材の捕捉面は、回転軸方向に対してその一方側から他方側にかけてスリップリング回転方向へ傾斜しており、
回転軸方向に関して最も一方側のスリップリングより他方側に配置された保持部材には、当該保持部材に対して回転軸方向の一方側に隣接する摩耗粉捕捉部材の捕捉面で捕捉された摩耗粉を回転軸方向の他方側へ排出するための摩耗粉排出口が当該捕捉面に臨んで形成されている、回転電機。
【請求項6】
請求項5に記載の回転電機であって、
回転軸方向に関して摩耗粉排出口の形成された保持部材を挟んで隣接する摩耗粉捕捉部材の一方側が他方側よりスリップリング回転方向後側に配置され、
保持部材の摩耗粉排出口を通って回転軸方向の他方側へ排出された磨耗粉が、当該保持部材に対して回転軸方向の他方側に隣接する摩耗粉捕捉部材の捕捉面で捕捉される、回転電機。
【請求項7】
請求項5または6に記載の回転電機であって、
回転軸方向に関して最も一方側のスリップリングより他方側に配置された保持部材には、通風口がスリップリング周方向に関して前記スリップリング回転方向後側のブラシと摩耗粉排出口との間の位置に形成されている、回転電機。
【請求項8】
請求項1〜7のいずれか1に記載の回転電機であって、
交流電流が流れることで回転磁界を発生可能な固定子導体が配設された固定子と、
前記回転子導体が配設された回転子である第1回転子に対し相対回転可能であり、回転子導体に交流電流が流れることで発生した回転磁界が作用するのに応じて第1回転子との間にトルクが作用し、固定子導体で発生した回転磁界が作用するのに応じて固定子との間にトルクが作用する第2回転子と、
をさらに備える、回転電機。
【請求項1】
回転軸に取り付けられ、回転子導体が配設された回転子と、
回転軸に取り付けられ、回転子導体に電気的に接続されたスリップリングと、
スリップリング周方向に関して互いに間隔をおいて保持部材に保持された複数のブラシであって、その各々がスリップリングの外周面に電気的に接触する複数のブラシと、
スリップリング周方向に関して互いに隣接するブラシ間の位置で保持部材に保持され、スリップリング回転方向後側のブラシとスリップリングの摺動部からスリップリング回転方向前側へ飛散した摩耗粉を捕捉面で捕捉してスリップリング回転方向前側のブラシとスリップリングの摺動部への付着を防止するための摩耗粉捕捉部材と、
を備える、回転電機。
【請求項2】
請求項1に記載の回転電機であって、
摩耗粉捕捉部材は、前記スリップリング回転方向後側のブラシより前記スリップリング回転方向前側のブラシに近い位置で保持部材に保持されている、回転電機。
【請求項3】
請求項1に記載の回転電機であって、
摩耗粉捕捉部材は、前記スリップリング回転方向前側のブラシより前記スリップリング回転方向後側のブラシに近い位置で保持部材に保持されている、回転電機。
【請求項4】
請求項1〜3のいずれか1に記載の回転電機であって、
保持部材は、ブラシ及び摩耗粉捕捉部材より回転軸方向の一方側に配置され、
摩耗粉捕捉部材の捕捉面は、回転軸方向に対してその一方側から他方側にかけてスリップリング回転方向へ傾斜している、回転電機。
【請求項5】
請求項1〜3のいずれか1に記載の回転電機であって、
複数のスリップリングが回転軸方向に関して互いに間隔をおいて回転軸に取り付けられ、
前記複数のブラシと前記摩耗粉捕捉部材が各スリップリング毎に対応して設けられ、
保持部材とスリップリングが回転軸方向に関してその一方側から他方側にかけて交互に配置され、
各摩耗粉捕捉部材の捕捉面は、回転軸方向に対してその一方側から他方側にかけてスリップリング回転方向へ傾斜しており、
回転軸方向に関して最も一方側のスリップリングより他方側に配置された保持部材には、当該保持部材に対して回転軸方向の一方側に隣接する摩耗粉捕捉部材の捕捉面で捕捉された摩耗粉を回転軸方向の他方側へ排出するための摩耗粉排出口が当該捕捉面に臨んで形成されている、回転電機。
【請求項6】
請求項5に記載の回転電機であって、
回転軸方向に関して摩耗粉排出口の形成された保持部材を挟んで隣接する摩耗粉捕捉部材の一方側が他方側よりスリップリング回転方向後側に配置され、
保持部材の摩耗粉排出口を通って回転軸方向の他方側へ排出された磨耗粉が、当該保持部材に対して回転軸方向の他方側に隣接する摩耗粉捕捉部材の捕捉面で捕捉される、回転電機。
【請求項7】
請求項5または6に記載の回転電機であって、
回転軸方向に関して最も一方側のスリップリングより他方側に配置された保持部材には、通風口がスリップリング周方向に関して前記スリップリング回転方向後側のブラシと摩耗粉排出口との間の位置に形成されている、回転電機。
【請求項8】
請求項1〜7のいずれか1に記載の回転電機であって、
交流電流が流れることで回転磁界を発生可能な固定子導体が配設された固定子と、
前記回転子導体が配設された回転子である第1回転子に対し相対回転可能であり、回転子導体に交流電流が流れることで発生した回転磁界が作用するのに応じて第1回転子との間にトルクが作用し、固定子導体で発生した回転磁界が作用するのに応じて固定子との間にトルクが作用する第2回転子と、
をさらに備える、回転電機。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】

【図12】

【図13】
【図14】
【図15】
【図16】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−222843(P2012−222843A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−82494(P2011−82494)
【出願日】平成23年4月4日(2011.4.4)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月4日(2011.4.4)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
[ Back to top ]