
回転駆動装置および電波レンズアンテナ装置
【課題】 小型化と動作精度の向上との両立を図ることが可能な回転駆動装置および電波レンズアンテナ装置を提供すること。
【解決手段】 それぞれが出力端を有しており、かつ互いに独立に軸回転する外筒軸5および内筒軸4を備えており、外筒軸5の出力端の回転駆動力を駆動源として一対のルネベルグレンズ21を駆動するとともに、外筒軸5および内筒軸4の出力端の回転数差によって生じる回転駆動力によって一対のフィード22を駆動する
【解決手段】 それぞれが出力端を有しており、かつ互いに独立に軸回転する外筒軸5および内筒軸4を備えており、外筒軸5の出力端の回転駆動力を駆動源として一対のルネベルグレンズ21を駆動するとともに、外筒軸5および内筒軸4の出力端の回転数差によって生じる回転駆動力によって一対のフィード22を駆動する
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、たとえばレーダー装置に用いられるものであって、被駆動体に独立して2軸の動作をさせうる回転駆動装置、およびその回転駆動装置を備える電波レンズアンテナ装置に関する。
【背景技術】
【0002】
たとえば気象観測において、マイクロ波などの高周波電波を対象物に向けて送信し、この対象物からの反射波を受信することにより、上記対象物の大きさや形状、距離、移動速度などの検知が行われている。このような検知を行う手段として、電波レンズと放射器を用いたレーダー装置が提案されている(たとえば、特許文献1)。
【0003】
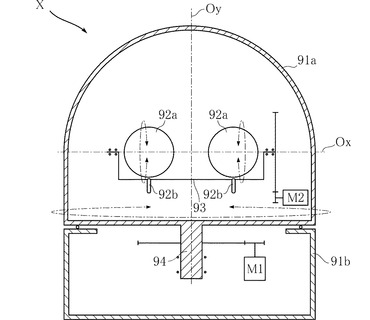
図8は、従来のレーダー装置の一例を示している。同図に示されたレーダー装置Xは、レドーム91aに収納された一対のルネベルグレンズ92aおよび一対のフィード92bを備えている。一対のルネベルグレンズ92aは、エレベーション軸Oxに沿って並べられている。一対のルネベルグレンズ92aおよび一対のフィード92bは、レドーム91aとともに、アジマス軸Oy周りに回転可能とされている。レドーム91aは、モータ室91bに支持されている。モータ室91bには、モータM1が収容されている。モータM1は、レドーム91aから延びる回転軸体94を駆動する駆動源である。一方、フィード92bは、回転軸体93に支持されて、エレベーション軸Ox周りに回転可能とされている。回転軸体93には、駆動源としてのモータM2が連結されている。レーダー装置Xを用いた気象観測においては、レドーム91a全体をアジマス軸Oy周りに回転させながら、一対のフィード92bを一対のルネベルグレンズ92aに対してエレベーション軸Ox周りに回転させることにより、水平方位0〜360度、水平面からの仰角0〜90度の観測が可能とされている。
【0004】
しかしながら、レーダー装置Xにおいては、一対のルネベルグレンズ92aおよび一対のフィード92bとともに、モータM2、およびこれらをカバーするレドーム91aを、アジマス軸Oyを中心として一括して回転させる必要がある。これらの回転部分は相当の慣性を有するため、駆動源としてのモータM1は、高出力であるものが求められる。また、モータM2への給電経路を、回転体である回転軸体94を介して確保する必要がある。さらに、レドーム91a内にモータM2とこれに付随する回転機構部品とを収容する必要があるため、レドーム91aひいてはレーダー装置X全体が大型化してしまうという不具合があった。また、正確な検知のためには、フィード92bの回転位置を正確に把握することが不可欠である。このためには、レドーム91a内にフィード92bの回転位置を検出するためのセンサ(図示略)などを配置することが強いられる。これにより、レドーム91aの大型化がさらに増長されることとなる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−181114号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、上記した事情のもとで考え出されたものであって、小型化と動作精度の向上との両立を図ることが可能な回転駆動装置およびその回転駆動装置を備えた電波レンズアンテナ装置を提供することをその課題とする。
【課題を解決するための手段】
【0007】
本発明によって提供される回転駆動装置は、それぞれが出力端を有しており、かつ互いに独立に軸回転する第1および第2回転軸体を備えており、上記第1回転軸体の出力端の回転駆動力を駆動源として第1被駆動体を駆動するとともに、上記第1および第2回転軸体の出力端の回転数差によって生じる回転駆動力によって第2被駆動体を駆動することを特徴としている。
【0008】
このような構成によれば、上記第1回転軸体および上記第2回転軸体は、一方が他方によって回転させられる関係とはなっていない。このため、上記第1回転軸体および上記第2回転軸体を駆動するための駆動源などを上記第1中心軸周りに回転させる必要が無い。これにより、小型化および動作精度の向上を図ることができる。
【0009】
本発明の好ましい実施の形態においては、上記第1回転軸体が第1中心軸周りに回転し、上記第1回転軸体の回転によって上記第1および第2被駆動体を上記第1中心軸周りに回転させ、上記第1回転軸体および上記第2回転軸体の回転数差に応じて、上記第1中心軸を中心軸とする円筒座標系の径方向に延びる第2中心軸周りに上記第2被駆動体を回転させる。
【0010】
本発明の好ましい実施の形態においては、上記第2中心軸は、上記第1被駆動体を貫通している。
【0011】
本発明の好ましい実施の形態においては、上記第1回転軸体によって支持されており、かつ上記第2中心軸に対して平行に配置された第3回転軸体をさらに備えており、上記第2回転軸体と上記第2被駆動体とは、上記第3回転軸体を介して連結されている。
【0012】
本発明の好ましい実施の形態においては、上記第1回転軸体と上記第2回転軸体とは、一方が他方の内部に挿通された断面同心円状とされている。
【0013】
本発明の好ましい実施の形態においては、上記第2回転軸体は、ベベルギアを介して上記第3回転軸体に連結されている。
【0014】
本発明の好ましい実施の形態においては、上記第1回転軸体および上記第2回転軸体のさらに内部に挿通されており、上記第1回転軸体とともに上記第1中心軸周りに回転する回転接続子を有する給電軸をさらに備える。
【0015】
本発明の好ましい実施の形態においては、上記第1回転軸体および上記第2回転軸体のいずれか一方に連結された第1モータと、上記第1モータに連結された入力軸、上記第1回転軸体および上記第2回転軸体のいずれか他方に連結された出力軸、および上記出力軸の回転数と上記入力軸の回転数とに差を生じさせる差動軸を有する差動減速器と、上記差動減速器の上記差動軸に連結された第2モータと、をさらに備える。
【0016】
本発明の好ましい実施の形態においては、上記第2モータの回転量を検出する回転量検出手段をさらに備える。
【0017】
本発明の好ましい実施の形態においては、上記第1回転軸体および上記第2回転軸体のいずれか一方に連結された第1モータと、上記第1回転軸体および上記第2回転軸体の他方に連結された第2モータと、をさらに備える。
【0018】
本発明の他の観点によれば、上記の回転駆動装置を備えた電波レンズアンテナ装置が提供される。この電波レンズアンテナ装置は、誘電体を用いて比誘電率が半径方向に所定の割合で変化するように形成された電波レンズと、上記電波レンズの焦点部にあわせて配置された一次放射器とをさらに備え、上記第1被駆動体である電波レンズ、および上記第2被駆動体である一次放射器は、アジマス軸である第1中心軸を回転中心とする上記第1回転軸体により、アジマス軸周りに回転可能に支持され、上記一次放射器はさらに、エレベーション軸であり上記電波レンズの中心を通る第2中心軸周りに回転可能に支持される。
【0019】
このような構成によれば、アジマス軸周りおよびエレベーション軸周りの回転を独立的に制御しながら、レドームを回転部分に含めることが不要になるため、電波レンズおよび一次放射器をアジマス軸周りに回転させる回転部分の総重量を軽減でき、その結果、スキャン速度を高速化できる。
【0020】
本発明の好ましい実施の形態において、電波レンズアンテナ装置は、上記電波レンズおよび一次放射器をカバーするレドームをさらに備え、上記レドームは、モータ室上に固定して支持され、上記第1回転軸体は、上記レドームと上記モータ室との間の隔壁に設けられた開口に挿通される。
【0021】
本発明のその他の特徴および利点は、添付図面を参照して以下に行う詳細な説明によって、より明らかとなろう。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態に基づく回転駆動装置を用いたレーダー装置を示す全体概略図である。
【図2】図1に示す回転駆動装置の外筒軸、内筒軸、給電軸を示す要部断面図である。
【図3】図1に示す回転駆動装置を示す要部平面図である。
【図4】図1に示す回転駆動装置を示す要部側面図である。
【図5】図1に示す回転駆動装置を示す要部正面図である。
【図6】図1に示す回転駆動装置を示す要部正面図である。
【図7】本発明の他の実施形態に基づく回転駆動装置を用いたレーダー装置を示す全体概略図である。
【図8】従来の回転駆動装置を用いたレーダー装置の一例を示す全体概略図である。
【発明を実施するための形態】
【0023】
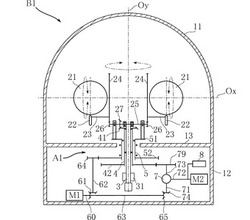
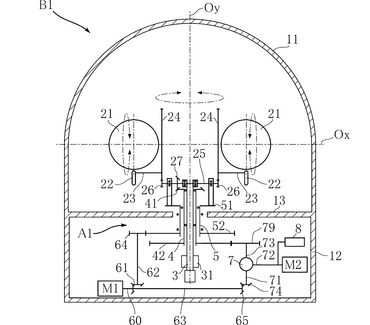
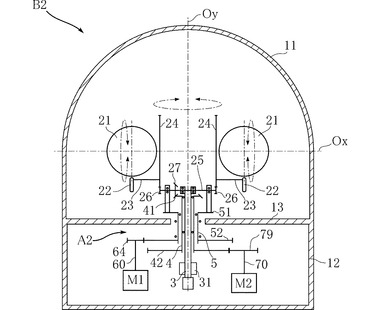
図1は、本発明の一実施形態に基づく回転駆動装置を用いたレーダー装置を示している。本実施形態の回転駆動装置A1は、エレベーションロッド25、給電軸3、内筒軸4、外筒軸5、差動減速器7、およびモータM1,M2を備えている。この回転駆動装置A1は、レドーム11、モータ室12、一対のルネベルグレンズ21、一対のフィード22とともに、レーダー装置B1を構成している。レーダー装置B1は、たとえば降水域の大きさや降水量などの気象観測に用いられるバイスタティック方式の小型気象レーダーである。小型気象レーダーは、大型気象レーダーと較べると、観測到達距離は短くなるが、スキャン速度を高速化し易い。
【0024】
レドーム11は、FRP(Fiber Reinforced Plastics)で成形されるのが一般的である。レドーム11には、高発泡材やハニカム等のコア材をFRPで挟み込んだサンドイッチ構造が採用されることもある。レドーム11は、屋外に配置されるレーダー装置B1のアンテナを台風などの強風から保護したり防水したりするのに用いられ、強度確保のため一定の重量を有することになる。レドーム11の上部は、電波を極力垂直に入射させて透過特性を良好にすると共に雨粒や雪が落ち易いようドーム状とされ、下部は円筒形状とされる。レドーム11は、一対のルネベルグレンズ21、一対のフィード22およびエレベーションロッド25を収容している。上記円筒形状部分の中心軸がアジマス軸Oy、径方向軸がエレベーション軸Oxとされている。モータ室12は、レドーム11の下端に繋がる円筒形状とされており、差動減速器7、およびモータM1,M2を収容している。レドーム11とモータ室12とは、隔壁13を介して互いに一体的に繋がっている。モータM1,M2をモータ室12に収容するとともにレドーム11を非回転部に固定することで、回転部分の総重量を軽減でき、小型気象レーダーとしても高速な回転が可能となる。
【0025】
一対のルネベルグレンズ21は、誘電体レンズの一種であり、本発明で言う電波レンズの一例に相当する。ルネベルグレンズ21は、球形とされ、その中心からの距離に応じて比誘電率が変化するように形成されており、たとえばポリエチレン樹脂、ポリプロピレン樹脂、ポリスチレン樹脂などの発泡体からなる。このような構成により、ルネベルグレンズ21は、ほぼ全方位において明瞭な焦点が存在する電波レンズとなっている。一対のルネベルグレンズ21は、エレベーション軸Ox方向に並んで配置されており、外筒軸5によって支持されている。
【0026】
一対のフィード22は、マイクロ波などの高周波電波の送受信に用いられる放射器の一例に相当し、一対のルネベルグレンズ21と合わせて一対のアンテナを構成する。たとえば一方が送信用、他方が受信用のアンテナとして用いられる。フィード22は、ルネベルグレンズ21の焦点に配置されている。発信側のフィード22からは、ルネベルグレンズ21の中心に向けて高周波電波が放射され、ルネベルグレンズ21から平面波として放射される。対象物によって反射された高周波電波(平面波)は、ルネベルグレンズ21によって、焦点位置に配置された受信側のフィード22に集められ、そのフィード22によってピックアップされる。フィード22は、ホーンアンテナ、マイクロストリップアンテナ、スパイラルアンテナ、スロットアンテナなど波長オーダのアンテナであればよく、小型にできる。
【0027】
一対のフィード22は、ブラケット23を介してギア24に支持されている。ギア24は、エレベーション軸Ox周りに回転する。ギア24は、エレベーションロッド25の両端に取り付けられたギア26と噛み合っている。エレベーションロッド25は、エレベーション軸Oxと平行な軸周りに回転可能に支持されている。エレベーションロッド25が回転すると、それに応じて一対のフィード22が、一対のルネベルグレンズ21を中心としてエレベーション軸Ox周りに回転する。
【0028】
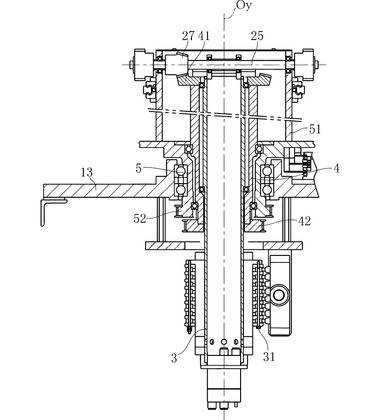
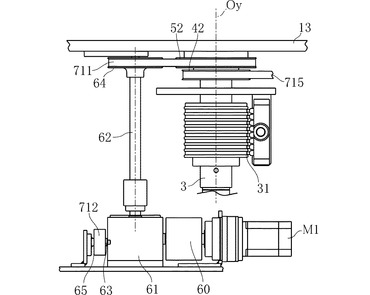
隔壁13には、外筒軸5、内筒軸4、および給電軸3が貫通する開口が設けられている。図1および図2に示すように、外筒軸5、内筒軸4、および給電軸3は、アジマス軸Oyを中心軸として互いに同心円状に配置されている。外筒軸5は、レドーム11に対してアジマス軸Oy周りに回転可能に支持されており、サポート51を介してエレベーションロッド25を支持している。これにより、外筒軸5がアジマス軸Oy周りに回転すると、内筒軸4の状態によらず、一対のルネベルグレンズ21および一対のフィード22が一体となってアジマス軸Oy周りに回転する。
【0029】
内筒軸4は、外筒軸5の内部に挿通されており、外筒軸5とは独立して、アジマス軸Oy周りに回転可能とされている。内筒軸4の上端には、ベベルギア41が設けられている。このベベルギア41は、エレベーションロッド25に設けられたベベルギア27と噛み合っている。
【0030】
外筒軸5と内筒軸4との回転数がまったく同じであれば、ベベルギア41とベベルギア27とは、相対回転が生じない。この場合、エレベーションロッド25はエレベーション軸Oxと平行な軸周りには回転しない。このため、一対のフィード22は、一対のルネベルグレンズ21に対して静止している。一方、外筒軸5と内筒軸4との回転数に差がある場合、ベベルギア41とベベルギア27とに相対回転が生じる。この場合、エレベーションロット25は、エレベーション軸Oxと平行な軸周りに回転する。このため、一対のフィード22は、一対のルネベルグレンズ21に対してエレベーション軸Ox周りに相対回転する。
【0031】
給電軸3は、フィード22への給電に用いられるものであり、内筒軸4の内部に挿通されている。本実施形態においては、給電軸3は、外筒軸5とともにアジマス軸Oy周りに回転する。給電軸3の下端には、給電子としてのスリップリング31が設けられている。スリップリング31は、モータ室12内に設けられた固定側の給電部から、回転しうるフィード22に対して給電するための導通部品である。
【0032】
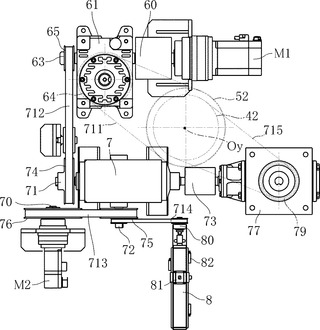
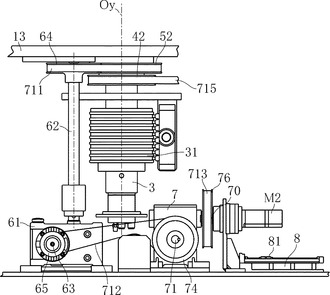
図1に示すように、モータ室12には、2つのモータM1,M2が配置されている。図3〜図5に示すように、モータM1の出力軸60は、ウォームギア61が連結されている。ウォームギア61は、出力軸62,63を有する。出力軸62は、ウォームギア61から真上方向に延びており、その上端にプーリ64が設けられている。プーリ64と外筒軸5に設けられたプーリ52とには、ベルト711が掛けられている。これにより、出力軸62の回転によって外筒軸5が回転する。出力軸63には、プーリ65が設けられている。
【0033】
差動減速器7は、入力軸71、出力軸73、および差動軸72を有している。差動減速器7は、入力軸71の回転数と出力軸73との回転数に、差動軸72の回転数に応じた差を生じさせる。たとえば、入力軸71の回転数をN1、出力軸73の回転数をN3、差動軸72の回転数をN2とすると、N3=N1/C1±N2/C2(C1,C2はいずれも定数)の関係を有する。差動軸72が正転すると、出力軸73の回転数N3が入力軸71の回転数N1よりも大となり、差動軸72が逆転すると、出力軸73の回転数N3が入力軸71の回転数N1よりも小となる。差動軸72が静止している場合は、出力軸73の回転数N3と入力軸71の回転数N1とは同一となる。
【0034】
入力軸71に設けられたプーリ74とプーリ65とには、ベルト712が掛けられている。これにより、モータM1によって入力軸71が回転させられる。図3および図6に示すように、差動軸72にはプーリ75が設けられ、モータM2の出力軸70には、プーリ76が設けられている。プーリ75とプーリ76とには、ベルト713が掛けられている。これにより、モータM2によって、差動軸72が回転させられる。出力軸73はウォームギア77に連結されている。ウォームギア77は、真上方向に延びる出力軸78を有している。出力軸78には、プーリ79が設けられている。そして、プーリ79と内筒軸4に設けられたプーリ42とには、ベルト715が掛けられている。これにより、差動減速器7の出力軸73が回転すると、内筒軸4が回転する。
【0035】
図1、図3、および図4に示すように、モータM2の近傍には、エレベーションセンサユニット8が配置されている。エレベーションセンサユニット8は、入力軸80、移動体81、およびセンサ82を備えている。入力軸80と差動軸72とは、それぞれに設けられたプーリおよびベルト714を介して連動して回転する。移動体81は、たとえば入力軸80に連結されたボールネジのナット部分である。入力軸80が回転すると、その回転方向および量に応じて移動体81が直線移動する。センサ82は、移動体81の直線移動軌道における位置を検出する。移動体81の位置を検出することにより、差動軸72の回転方向と回転量を検知することができる。
【0036】
次に、回転駆動装置A1およびレーダー装置B1の作用について説明する。
【0037】
レーダー装置B1を用いた気象観測をする場合、回転駆動装置A1においては、まず、一対のルネベルグレンズ21と一対のフィード22とをアジマス軸Oy周りに一体的に回転させる。これは、モータM1によって外筒5を回転させることによって行う。このとき、モータM2を静止させておくと、内筒軸4が外筒軸5と同じ回転数で回転する。この場合、一対のフィード22は、一対のルネベルグレンズ21に対して相対回転しない。アジマス軸Oy周りの回転によって水平方位の0〜360度の全方位を対象とした観測が可能となる。次に、アジマス軸Oy周りの回転に加えて、一対のフィード22をルネベルグレンズ21を中心としてエレベーション軸Ox周りに回転させる。これにより、各水平方位での仰角0から90度の観測が可能となる。このときには、モータM2を回転させることにより、外筒軸5の回転数と内筒軸4の回転数とに差を生じさせる。この回転数差に応じて一対のフィード22が一対のルネベルグレンズ21を中心としてエレベーション軸Ox周りに回転する。モータM2を適宜正転、逆転させることにより、レーダー装置B1は、観測地点から望む天空の全領域を対象として気象観測を行うことができる。
【0038】
上述したとおり、一対のルネベルグレンズ21と一対のフィード22とをアジマス軸Oy周りに回転させつつ、一対のフィード22をさらにエレベーション軸Ox周りに回転可能であるにも関わらず、2つのモータM1,M2は、いずれもモータ室12内に固定されており、回転しない。言い換えると、アジマス軸Oy周りに回転するものは、一対のルネベルグレンズ21、一対のフィード22、およびエレベーションロッド25といった必要最小限の構成部品のみである。さらに、レドーム11は、アジマス軸Oy周りに回転することなく、モータ室12と一体的に、固定されたままでよい。このため、レーダー装置B1の回転部分の慣性を小さくすることが可能であり、駆動源としてのモータM1を低出力化することができる。また、レドーム11内にモータM1,M2などを配置する必要が無い。これにより、レドーム11、ひいてはレーダー装置B1の小型化を図ることができる。また、レーダー装置B1のスキャン速度を向上させ易い。
【0039】
一対のフィード22をエレベーション軸Ox周りに回転させるためには、一対のフィード22を回転させたい分だけモータM2を回転させれば済む。すなわち、モータM2の回転方向と、一対のフィード22の回転方向が一致しており、また、モータM2の回転量と一対のフィード22の回転量が比例関係となる。このため、モータM2の回転を正確に制御しさえすれば、一対のフィード22を一対のルネベルグレンズ21に対して所望の位置に正確に配置することが可能である。これは、レーダー装置B1の観測精度を高めるのに適している。
【0040】
また、エレベーションセンサユニット8によってモータM2の回転を検知することにより、一対のフィード22の回転方向および回転量を正確に把握することが可能である。このように、エレベーションセンサユニット8は、一対のフィード22の位置検出を行うものでありながら、一対のフィード22とは隔離されたモータ室12内に配置されている。これは、一対のフィード22の位置検出を正確に行うとともに、レドーム11の小型化を図るのに有利である。
【0041】
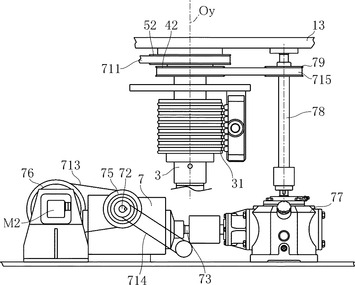
図7は、本発明の他の実施形態に基づく回転駆動装置を用いたレーダー装置を示している。なお、本図において、上記実施形態と同一または類似の要素には、上記実施形態と同一の符号を付している。本実施形態の回転駆動装置A2は、レーダー装置B2の駆動手段として用いられており、外筒軸5および内筒軸4を駆動するための機構が、上述した回転駆動装置A1と異なっている。
【0042】
本実施形態においては、モータM1の出力軸60に設けられたプーリ64と外筒軸5のプーリ52とが図示しないベルトによって連結されている。一方、モータM2の出力軸70に設けられたプーリ79と内筒軸4のプーリ42とが図示しないベルトによって連結されている。
【0043】
本実施形態において、一対のルネベルグレンズ21と一対のフィード22とをアジマス軸Oy周りに一体的に回転させるには、モータM1,M2を同期回転させ、双方の回転数を同一とする。これにより、外筒軸5の回転数と内筒軸4の回転数とに差が生じないため、一対のフィード22は一対のルネベルグレンズ21に対して回転しない。次に、アジマス軸Oy周りの回転に加えて、一対のフィード22をルネベルグレンズ21を中心としてエレベーション軸Ox周りに回転させるには、モータM1の回転数に対してモータM2の回転数を増減させる。すなわち、モータM2の回転数を相対的に増やすと、一対のフィード22がエレベーション軸Ox周りに正転し、モータM2の回転数を相対的に減らすと、一対のフィード22がエレベーション軸Ox周りに逆転する。このように、モータM1の回転数に対するモータM2の回転数を制御することにより、一対のフィード22のエレベーション軸Ox周りの回転を制御することができる。
【0044】
本実施形態によっても、レドーム11に収容すべき構成部品を削減することが可能であり、レーダー装置B2の小型化と観測精度の向上とを両立することができる。さらには、レーダー装置B2のスキャン速度を向上させ易い。また、外筒軸5および内筒軸4を駆動するための機構が複雑化することを抑制することができる。
【0045】
本発明に係るレーダー装置は、上述した実施形態に限定されるものではない。本発明に係るレーダー装置の各部の具体的な構成は、種々に設計変更自在である。上述の実施形態では、気象レーダー装置として本発明を説明したが、これに限られるものではない。例えば通信用のアンテナ装置に本発明を適用することも可能である。
【産業上の利用可能性】
【0046】
本発明は、小型化と動作精度の向上との両立を図ることが可能であり、気象レーダーなど様々な用途で利用可能である。
【符号の説明】
【0047】
A1,A2 回転駆動装置
B1,B2 レーダー装置
M1 (第1)モータ
M2 (第2)モータ
Ox エレベーション軸(第2中心軸)
Oy アジマス軸(第1中心軸)
3 給電軸
4 内筒軸(第2回転軸体)
5 外筒軸(第1回転軸体)
7 差動減速器
8 エレベーションセンサユニット
11 レドーム
12 モータ室
21 ルネベルグレンズ(第1被駆動体)
22 フィード(第2被駆動体)
23 ブラケット
24 ギア
25 エレベーションロッド(第3回転軸体)
26 ギア
27 べベルギア
31 スリップリング(給電子)
41 べベルギア
42 プーリ
51 サポート
52 プーリ
60 出力軸
61 ウォームギア
62,63 出力軸
64,65 プーリ
70 出力軸
71 入力軸
72 差動軸
73 出力軸
74,75,76 プーリ
77 ウォームギア
78 出力軸
79 プーリ
711〜715 ベルト
81 移動体
82 センサ
【技術分野】
【0001】
本発明は、たとえばレーダー装置に用いられるものであって、被駆動体に独立して2軸の動作をさせうる回転駆動装置、およびその回転駆動装置を備える電波レンズアンテナ装置に関する。
【背景技術】
【0002】
たとえば気象観測において、マイクロ波などの高周波電波を対象物に向けて送信し、この対象物からの反射波を受信することにより、上記対象物の大きさや形状、距離、移動速度などの検知が行われている。このような検知を行う手段として、電波レンズと放射器を用いたレーダー装置が提案されている(たとえば、特許文献1)。
【0003】
図8は、従来のレーダー装置の一例を示している。同図に示されたレーダー装置Xは、レドーム91aに収納された一対のルネベルグレンズ92aおよび一対のフィード92bを備えている。一対のルネベルグレンズ92aは、エレベーション軸Oxに沿って並べられている。一対のルネベルグレンズ92aおよび一対のフィード92bは、レドーム91aとともに、アジマス軸Oy周りに回転可能とされている。レドーム91aは、モータ室91bに支持されている。モータ室91bには、モータM1が収容されている。モータM1は、レドーム91aから延びる回転軸体94を駆動する駆動源である。一方、フィード92bは、回転軸体93に支持されて、エレベーション軸Ox周りに回転可能とされている。回転軸体93には、駆動源としてのモータM2が連結されている。レーダー装置Xを用いた気象観測においては、レドーム91a全体をアジマス軸Oy周りに回転させながら、一対のフィード92bを一対のルネベルグレンズ92aに対してエレベーション軸Ox周りに回転させることにより、水平方位0〜360度、水平面からの仰角0〜90度の観測が可能とされている。
【0004】
しかしながら、レーダー装置Xにおいては、一対のルネベルグレンズ92aおよび一対のフィード92bとともに、モータM2、およびこれらをカバーするレドーム91aを、アジマス軸Oyを中心として一括して回転させる必要がある。これらの回転部分は相当の慣性を有するため、駆動源としてのモータM1は、高出力であるものが求められる。また、モータM2への給電経路を、回転体である回転軸体94を介して確保する必要がある。さらに、レドーム91a内にモータM2とこれに付随する回転機構部品とを収容する必要があるため、レドーム91aひいてはレーダー装置X全体が大型化してしまうという不具合があった。また、正確な検知のためには、フィード92bの回転位置を正確に把握することが不可欠である。このためには、レドーム91a内にフィード92bの回転位置を検出するためのセンサ(図示略)などを配置することが強いられる。これにより、レドーム91aの大型化がさらに増長されることとなる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−181114号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、上記した事情のもとで考え出されたものであって、小型化と動作精度の向上との両立を図ることが可能な回転駆動装置およびその回転駆動装置を備えた電波レンズアンテナ装置を提供することをその課題とする。
【課題を解決するための手段】
【0007】
本発明によって提供される回転駆動装置は、それぞれが出力端を有しており、かつ互いに独立に軸回転する第1および第2回転軸体を備えており、上記第1回転軸体の出力端の回転駆動力を駆動源として第1被駆動体を駆動するとともに、上記第1および第2回転軸体の出力端の回転数差によって生じる回転駆動力によって第2被駆動体を駆動することを特徴としている。
【0008】
このような構成によれば、上記第1回転軸体および上記第2回転軸体は、一方が他方によって回転させられる関係とはなっていない。このため、上記第1回転軸体および上記第2回転軸体を駆動するための駆動源などを上記第1中心軸周りに回転させる必要が無い。これにより、小型化および動作精度の向上を図ることができる。
【0009】
本発明の好ましい実施の形態においては、上記第1回転軸体が第1中心軸周りに回転し、上記第1回転軸体の回転によって上記第1および第2被駆動体を上記第1中心軸周りに回転させ、上記第1回転軸体および上記第2回転軸体の回転数差に応じて、上記第1中心軸を中心軸とする円筒座標系の径方向に延びる第2中心軸周りに上記第2被駆動体を回転させる。
【0010】
本発明の好ましい実施の形態においては、上記第2中心軸は、上記第1被駆動体を貫通している。
【0011】
本発明の好ましい実施の形態においては、上記第1回転軸体によって支持されており、かつ上記第2中心軸に対して平行に配置された第3回転軸体をさらに備えており、上記第2回転軸体と上記第2被駆動体とは、上記第3回転軸体を介して連結されている。
【0012】
本発明の好ましい実施の形態においては、上記第1回転軸体と上記第2回転軸体とは、一方が他方の内部に挿通された断面同心円状とされている。
【0013】
本発明の好ましい実施の形態においては、上記第2回転軸体は、ベベルギアを介して上記第3回転軸体に連結されている。
【0014】
本発明の好ましい実施の形態においては、上記第1回転軸体および上記第2回転軸体のさらに内部に挿通されており、上記第1回転軸体とともに上記第1中心軸周りに回転する回転接続子を有する給電軸をさらに備える。
【0015】
本発明の好ましい実施の形態においては、上記第1回転軸体および上記第2回転軸体のいずれか一方に連結された第1モータと、上記第1モータに連結された入力軸、上記第1回転軸体および上記第2回転軸体のいずれか他方に連結された出力軸、および上記出力軸の回転数と上記入力軸の回転数とに差を生じさせる差動軸を有する差動減速器と、上記差動減速器の上記差動軸に連結された第2モータと、をさらに備える。
【0016】
本発明の好ましい実施の形態においては、上記第2モータの回転量を検出する回転量検出手段をさらに備える。
【0017】
本発明の好ましい実施の形態においては、上記第1回転軸体および上記第2回転軸体のいずれか一方に連結された第1モータと、上記第1回転軸体および上記第2回転軸体の他方に連結された第2モータと、をさらに備える。
【0018】
本発明の他の観点によれば、上記の回転駆動装置を備えた電波レンズアンテナ装置が提供される。この電波レンズアンテナ装置は、誘電体を用いて比誘電率が半径方向に所定の割合で変化するように形成された電波レンズと、上記電波レンズの焦点部にあわせて配置された一次放射器とをさらに備え、上記第1被駆動体である電波レンズ、および上記第2被駆動体である一次放射器は、アジマス軸である第1中心軸を回転中心とする上記第1回転軸体により、アジマス軸周りに回転可能に支持され、上記一次放射器はさらに、エレベーション軸であり上記電波レンズの中心を通る第2中心軸周りに回転可能に支持される。
【0019】
このような構成によれば、アジマス軸周りおよびエレベーション軸周りの回転を独立的に制御しながら、レドームを回転部分に含めることが不要になるため、電波レンズおよび一次放射器をアジマス軸周りに回転させる回転部分の総重量を軽減でき、その結果、スキャン速度を高速化できる。
【0020】
本発明の好ましい実施の形態において、電波レンズアンテナ装置は、上記電波レンズおよび一次放射器をカバーするレドームをさらに備え、上記レドームは、モータ室上に固定して支持され、上記第1回転軸体は、上記レドームと上記モータ室との間の隔壁に設けられた開口に挿通される。
【0021】
本発明のその他の特徴および利点は、添付図面を参照して以下に行う詳細な説明によって、より明らかとなろう。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態に基づく回転駆動装置を用いたレーダー装置を示す全体概略図である。
【図2】図1に示す回転駆動装置の外筒軸、内筒軸、給電軸を示す要部断面図である。
【図3】図1に示す回転駆動装置を示す要部平面図である。
【図4】図1に示す回転駆動装置を示す要部側面図である。
【図5】図1に示す回転駆動装置を示す要部正面図である。
【図6】図1に示す回転駆動装置を示す要部正面図である。
【図7】本発明の他の実施形態に基づく回転駆動装置を用いたレーダー装置を示す全体概略図である。
【図8】従来の回転駆動装置を用いたレーダー装置の一例を示す全体概略図である。
【発明を実施するための形態】
【0023】
図1は、本発明の一実施形態に基づく回転駆動装置を用いたレーダー装置を示している。本実施形態の回転駆動装置A1は、エレベーションロッド25、給電軸3、内筒軸4、外筒軸5、差動減速器7、およびモータM1,M2を備えている。この回転駆動装置A1は、レドーム11、モータ室12、一対のルネベルグレンズ21、一対のフィード22とともに、レーダー装置B1を構成している。レーダー装置B1は、たとえば降水域の大きさや降水量などの気象観測に用いられるバイスタティック方式の小型気象レーダーである。小型気象レーダーは、大型気象レーダーと較べると、観測到達距離は短くなるが、スキャン速度を高速化し易い。
【0024】
レドーム11は、FRP(Fiber Reinforced Plastics)で成形されるのが一般的である。レドーム11には、高発泡材やハニカム等のコア材をFRPで挟み込んだサンドイッチ構造が採用されることもある。レドーム11は、屋外に配置されるレーダー装置B1のアンテナを台風などの強風から保護したり防水したりするのに用いられ、強度確保のため一定の重量を有することになる。レドーム11の上部は、電波を極力垂直に入射させて透過特性を良好にすると共に雨粒や雪が落ち易いようドーム状とされ、下部は円筒形状とされる。レドーム11は、一対のルネベルグレンズ21、一対のフィード22およびエレベーションロッド25を収容している。上記円筒形状部分の中心軸がアジマス軸Oy、径方向軸がエレベーション軸Oxとされている。モータ室12は、レドーム11の下端に繋がる円筒形状とされており、差動減速器7、およびモータM1,M2を収容している。レドーム11とモータ室12とは、隔壁13を介して互いに一体的に繋がっている。モータM1,M2をモータ室12に収容するとともにレドーム11を非回転部に固定することで、回転部分の総重量を軽減でき、小型気象レーダーとしても高速な回転が可能となる。
【0025】
一対のルネベルグレンズ21は、誘電体レンズの一種であり、本発明で言う電波レンズの一例に相当する。ルネベルグレンズ21は、球形とされ、その中心からの距離に応じて比誘電率が変化するように形成されており、たとえばポリエチレン樹脂、ポリプロピレン樹脂、ポリスチレン樹脂などの発泡体からなる。このような構成により、ルネベルグレンズ21は、ほぼ全方位において明瞭な焦点が存在する電波レンズとなっている。一対のルネベルグレンズ21は、エレベーション軸Ox方向に並んで配置されており、外筒軸5によって支持されている。
【0026】
一対のフィード22は、マイクロ波などの高周波電波の送受信に用いられる放射器の一例に相当し、一対のルネベルグレンズ21と合わせて一対のアンテナを構成する。たとえば一方が送信用、他方が受信用のアンテナとして用いられる。フィード22は、ルネベルグレンズ21の焦点に配置されている。発信側のフィード22からは、ルネベルグレンズ21の中心に向けて高周波電波が放射され、ルネベルグレンズ21から平面波として放射される。対象物によって反射された高周波電波(平面波)は、ルネベルグレンズ21によって、焦点位置に配置された受信側のフィード22に集められ、そのフィード22によってピックアップされる。フィード22は、ホーンアンテナ、マイクロストリップアンテナ、スパイラルアンテナ、スロットアンテナなど波長オーダのアンテナであればよく、小型にできる。
【0027】
一対のフィード22は、ブラケット23を介してギア24に支持されている。ギア24は、エレベーション軸Ox周りに回転する。ギア24は、エレベーションロッド25の両端に取り付けられたギア26と噛み合っている。エレベーションロッド25は、エレベーション軸Oxと平行な軸周りに回転可能に支持されている。エレベーションロッド25が回転すると、それに応じて一対のフィード22が、一対のルネベルグレンズ21を中心としてエレベーション軸Ox周りに回転する。
【0028】
隔壁13には、外筒軸5、内筒軸4、および給電軸3が貫通する開口が設けられている。図1および図2に示すように、外筒軸5、内筒軸4、および給電軸3は、アジマス軸Oyを中心軸として互いに同心円状に配置されている。外筒軸5は、レドーム11に対してアジマス軸Oy周りに回転可能に支持されており、サポート51を介してエレベーションロッド25を支持している。これにより、外筒軸5がアジマス軸Oy周りに回転すると、内筒軸4の状態によらず、一対のルネベルグレンズ21および一対のフィード22が一体となってアジマス軸Oy周りに回転する。
【0029】
内筒軸4は、外筒軸5の内部に挿通されており、外筒軸5とは独立して、アジマス軸Oy周りに回転可能とされている。内筒軸4の上端には、ベベルギア41が設けられている。このベベルギア41は、エレベーションロッド25に設けられたベベルギア27と噛み合っている。
【0030】
外筒軸5と内筒軸4との回転数がまったく同じであれば、ベベルギア41とベベルギア27とは、相対回転が生じない。この場合、エレベーションロッド25はエレベーション軸Oxと平行な軸周りには回転しない。このため、一対のフィード22は、一対のルネベルグレンズ21に対して静止している。一方、外筒軸5と内筒軸4との回転数に差がある場合、ベベルギア41とベベルギア27とに相対回転が生じる。この場合、エレベーションロット25は、エレベーション軸Oxと平行な軸周りに回転する。このため、一対のフィード22は、一対のルネベルグレンズ21に対してエレベーション軸Ox周りに相対回転する。
【0031】
給電軸3は、フィード22への給電に用いられるものであり、内筒軸4の内部に挿通されている。本実施形態においては、給電軸3は、外筒軸5とともにアジマス軸Oy周りに回転する。給電軸3の下端には、給電子としてのスリップリング31が設けられている。スリップリング31は、モータ室12内に設けられた固定側の給電部から、回転しうるフィード22に対して給電するための導通部品である。
【0032】
図1に示すように、モータ室12には、2つのモータM1,M2が配置されている。図3〜図5に示すように、モータM1の出力軸60は、ウォームギア61が連結されている。ウォームギア61は、出力軸62,63を有する。出力軸62は、ウォームギア61から真上方向に延びており、その上端にプーリ64が設けられている。プーリ64と外筒軸5に設けられたプーリ52とには、ベルト711が掛けられている。これにより、出力軸62の回転によって外筒軸5が回転する。出力軸63には、プーリ65が設けられている。
【0033】
差動減速器7は、入力軸71、出力軸73、および差動軸72を有している。差動減速器7は、入力軸71の回転数と出力軸73との回転数に、差動軸72の回転数に応じた差を生じさせる。たとえば、入力軸71の回転数をN1、出力軸73の回転数をN3、差動軸72の回転数をN2とすると、N3=N1/C1±N2/C2(C1,C2はいずれも定数)の関係を有する。差動軸72が正転すると、出力軸73の回転数N3が入力軸71の回転数N1よりも大となり、差動軸72が逆転すると、出力軸73の回転数N3が入力軸71の回転数N1よりも小となる。差動軸72が静止している場合は、出力軸73の回転数N3と入力軸71の回転数N1とは同一となる。
【0034】
入力軸71に設けられたプーリ74とプーリ65とには、ベルト712が掛けられている。これにより、モータM1によって入力軸71が回転させられる。図3および図6に示すように、差動軸72にはプーリ75が設けられ、モータM2の出力軸70には、プーリ76が設けられている。プーリ75とプーリ76とには、ベルト713が掛けられている。これにより、モータM2によって、差動軸72が回転させられる。出力軸73はウォームギア77に連結されている。ウォームギア77は、真上方向に延びる出力軸78を有している。出力軸78には、プーリ79が設けられている。そして、プーリ79と内筒軸4に設けられたプーリ42とには、ベルト715が掛けられている。これにより、差動減速器7の出力軸73が回転すると、内筒軸4が回転する。
【0035】
図1、図3、および図4に示すように、モータM2の近傍には、エレベーションセンサユニット8が配置されている。エレベーションセンサユニット8は、入力軸80、移動体81、およびセンサ82を備えている。入力軸80と差動軸72とは、それぞれに設けられたプーリおよびベルト714を介して連動して回転する。移動体81は、たとえば入力軸80に連結されたボールネジのナット部分である。入力軸80が回転すると、その回転方向および量に応じて移動体81が直線移動する。センサ82は、移動体81の直線移動軌道における位置を検出する。移動体81の位置を検出することにより、差動軸72の回転方向と回転量を検知することができる。
【0036】
次に、回転駆動装置A1およびレーダー装置B1の作用について説明する。
【0037】
レーダー装置B1を用いた気象観測をする場合、回転駆動装置A1においては、まず、一対のルネベルグレンズ21と一対のフィード22とをアジマス軸Oy周りに一体的に回転させる。これは、モータM1によって外筒5を回転させることによって行う。このとき、モータM2を静止させておくと、内筒軸4が外筒軸5と同じ回転数で回転する。この場合、一対のフィード22は、一対のルネベルグレンズ21に対して相対回転しない。アジマス軸Oy周りの回転によって水平方位の0〜360度の全方位を対象とした観測が可能となる。次に、アジマス軸Oy周りの回転に加えて、一対のフィード22をルネベルグレンズ21を中心としてエレベーション軸Ox周りに回転させる。これにより、各水平方位での仰角0から90度の観測が可能となる。このときには、モータM2を回転させることにより、外筒軸5の回転数と内筒軸4の回転数とに差を生じさせる。この回転数差に応じて一対のフィード22が一対のルネベルグレンズ21を中心としてエレベーション軸Ox周りに回転する。モータM2を適宜正転、逆転させることにより、レーダー装置B1は、観測地点から望む天空の全領域を対象として気象観測を行うことができる。
【0038】
上述したとおり、一対のルネベルグレンズ21と一対のフィード22とをアジマス軸Oy周りに回転させつつ、一対のフィード22をさらにエレベーション軸Ox周りに回転可能であるにも関わらず、2つのモータM1,M2は、いずれもモータ室12内に固定されており、回転しない。言い換えると、アジマス軸Oy周りに回転するものは、一対のルネベルグレンズ21、一対のフィード22、およびエレベーションロッド25といった必要最小限の構成部品のみである。さらに、レドーム11は、アジマス軸Oy周りに回転することなく、モータ室12と一体的に、固定されたままでよい。このため、レーダー装置B1の回転部分の慣性を小さくすることが可能であり、駆動源としてのモータM1を低出力化することができる。また、レドーム11内にモータM1,M2などを配置する必要が無い。これにより、レドーム11、ひいてはレーダー装置B1の小型化を図ることができる。また、レーダー装置B1のスキャン速度を向上させ易い。
【0039】
一対のフィード22をエレベーション軸Ox周りに回転させるためには、一対のフィード22を回転させたい分だけモータM2を回転させれば済む。すなわち、モータM2の回転方向と、一対のフィード22の回転方向が一致しており、また、モータM2の回転量と一対のフィード22の回転量が比例関係となる。このため、モータM2の回転を正確に制御しさえすれば、一対のフィード22を一対のルネベルグレンズ21に対して所望の位置に正確に配置することが可能である。これは、レーダー装置B1の観測精度を高めるのに適している。
【0040】
また、エレベーションセンサユニット8によってモータM2の回転を検知することにより、一対のフィード22の回転方向および回転量を正確に把握することが可能である。このように、エレベーションセンサユニット8は、一対のフィード22の位置検出を行うものでありながら、一対のフィード22とは隔離されたモータ室12内に配置されている。これは、一対のフィード22の位置検出を正確に行うとともに、レドーム11の小型化を図るのに有利である。
【0041】
図7は、本発明の他の実施形態に基づく回転駆動装置を用いたレーダー装置を示している。なお、本図において、上記実施形態と同一または類似の要素には、上記実施形態と同一の符号を付している。本実施形態の回転駆動装置A2は、レーダー装置B2の駆動手段として用いられており、外筒軸5および内筒軸4を駆動するための機構が、上述した回転駆動装置A1と異なっている。
【0042】
本実施形態においては、モータM1の出力軸60に設けられたプーリ64と外筒軸5のプーリ52とが図示しないベルトによって連結されている。一方、モータM2の出力軸70に設けられたプーリ79と内筒軸4のプーリ42とが図示しないベルトによって連結されている。
【0043】
本実施形態において、一対のルネベルグレンズ21と一対のフィード22とをアジマス軸Oy周りに一体的に回転させるには、モータM1,M2を同期回転させ、双方の回転数を同一とする。これにより、外筒軸5の回転数と内筒軸4の回転数とに差が生じないため、一対のフィード22は一対のルネベルグレンズ21に対して回転しない。次に、アジマス軸Oy周りの回転に加えて、一対のフィード22をルネベルグレンズ21を中心としてエレベーション軸Ox周りに回転させるには、モータM1の回転数に対してモータM2の回転数を増減させる。すなわち、モータM2の回転数を相対的に増やすと、一対のフィード22がエレベーション軸Ox周りに正転し、モータM2の回転数を相対的に減らすと、一対のフィード22がエレベーション軸Ox周りに逆転する。このように、モータM1の回転数に対するモータM2の回転数を制御することにより、一対のフィード22のエレベーション軸Ox周りの回転を制御することができる。
【0044】
本実施形態によっても、レドーム11に収容すべき構成部品を削減することが可能であり、レーダー装置B2の小型化と観測精度の向上とを両立することができる。さらには、レーダー装置B2のスキャン速度を向上させ易い。また、外筒軸5および内筒軸4を駆動するための機構が複雑化することを抑制することができる。
【0045】
本発明に係るレーダー装置は、上述した実施形態に限定されるものではない。本発明に係るレーダー装置の各部の具体的な構成は、種々に設計変更自在である。上述の実施形態では、気象レーダー装置として本発明を説明したが、これに限られるものではない。例えば通信用のアンテナ装置に本発明を適用することも可能である。
【産業上の利用可能性】
【0046】
本発明は、小型化と動作精度の向上との両立を図ることが可能であり、気象レーダーなど様々な用途で利用可能である。
【符号の説明】
【0047】
A1,A2 回転駆動装置
B1,B2 レーダー装置
M1 (第1)モータ
M2 (第2)モータ
Ox エレベーション軸(第2中心軸)
Oy アジマス軸(第1中心軸)
3 給電軸
4 内筒軸(第2回転軸体)
5 外筒軸(第1回転軸体)
7 差動減速器
8 エレベーションセンサユニット
11 レドーム
12 モータ室
21 ルネベルグレンズ(第1被駆動体)
22 フィード(第2被駆動体)
23 ブラケット
24 ギア
25 エレベーションロッド(第3回転軸体)
26 ギア
27 べベルギア
31 スリップリング(給電子)
41 べベルギア
42 プーリ
51 サポート
52 プーリ
60 出力軸
61 ウォームギア
62,63 出力軸
64,65 プーリ
70 出力軸
71 入力軸
72 差動軸
73 出力軸
74,75,76 プーリ
77 ウォームギア
78 出力軸
79 プーリ
711〜715 ベルト
81 移動体
82 センサ
【特許請求の範囲】
【請求項1】
それぞれが出力端を有しており、かつ互いに独立に軸回転する第1および第2回転軸体を備えており、
上記第1回転軸体の出力端の回転駆動力を駆動源として第1被駆動体を駆動するとともに、
上記第1および第2回転軸体の出力端の回転数差によって生じる回転駆動力によって第2被駆動体を駆動することを特徴とする、回転駆動装置。
【請求項2】
上記第1回転軸体が第1中心軸周りに回転し、上記第1回転軸体の回転によって上記第1および第2被駆動体を上記第1中心軸周りに回転させ、
上記第1回転軸体および上記第2回転軸体の回転数差に応じて、上記第1中心軸を中心軸とする円筒座標系の径方向に延びる第2中心軸周りに上記第2被駆動体を回転させる、請求項1に記載の回転駆動装置。
【請求項3】
上記第2中心軸は、上記第1被駆動体を貫通している、請求項2に記載の回転駆動装置。
【請求項4】
上記第1回転軸体によって支持されており、かつ上記第2中心軸に対して平行に配置された第3回転軸体をさらに備えており、
上記第2回転軸体と上記第2被駆動体とは、上記第3回転軸体を介して連結されている、請求項3に記載の回転駆動装置。
【請求項5】
上記第1回転軸体と上記第2回転軸体とは、一方が他方の内部に挿通された断面同心円状とされている、請求項4に記載の回転駆動装置。
【請求項6】
上記第2回転軸体は、ベベルギアを介して上記第3回転軸体に連結されている、請求項5に記載の回転駆動装置。
【請求項7】
上記第1回転軸体および上記第2回転軸体のさらに内部に挿通されており、上記第1回転軸体とともに上記第1中心軸周りに回転する回転接続子を有する給電軸をさらに備える、請求項5または6に記載の回転駆動装置。
【請求項8】
上記第1回転軸体および上記第2回転軸体のいずれか一方に連結された第1モータと、
上記第1モータに連結された入力軸、上記第1回転軸体および上記第2回転軸体のいずれか他方に連結された出力軸、および上記出力軸の回転数と上記入力軸の回転数とに差を生じさせる差動軸を有する差動減速器と、
上記差動減速器の上記差動軸に連結された第2モータと、
をさらに備える、請求項1ないし7のいずれかに記載の回転駆動装置。
【請求項9】
上記第2モータの回転量を検出する回転量検出手段をさらに備える、請求項8に記載の回転駆動装置。
【請求項10】
上記第1回転軸体および上記第2回転軸体のいずれか一方に連結された第1モータと、
上記第1回転軸体および上記第2回転軸体の他方に連結された第2モータと、
をさらに備える、請求項1ないし7のいずれかに記載の回転駆動装置。
【請求項11】
請求項1ないし10のいずれかに記載の回転駆動装置と、
誘電体を用いて比誘電率が半径方向に所定の割合で変化するように形成された電波レンズと、
上記電波レンズの焦点部にあわせて配置された一次放射器とを備え、
上記第1被駆動体である電波レンズ、および上記第2被駆動体である一次放射器は、アジマス軸である第1中心軸を回転中心とする上記第1回転軸体により、アジマス軸周りに回転可能に支持され、
上記一次放射器はさらに、エレベーション軸であり上記電波レンズの中心を通る第2中心軸周りに回転可能に支持される、電波レンズアンテナ装置。
【請求項12】
上記電波レンズおよび一次放射器をカバーするレドームをさらに備え、
上記レドームは、モータ室上に固定して支持され、
上記第1回転軸体は、上記レドームと上記モータ室との間の隔壁に設けられた開口に挿通された、請求項11に記載の電波レンズアンテナ装置。
【請求項1】
それぞれが出力端を有しており、かつ互いに独立に軸回転する第1および第2回転軸体を備えており、
上記第1回転軸体の出力端の回転駆動力を駆動源として第1被駆動体を駆動するとともに、
上記第1および第2回転軸体の出力端の回転数差によって生じる回転駆動力によって第2被駆動体を駆動することを特徴とする、回転駆動装置。
【請求項2】
上記第1回転軸体が第1中心軸周りに回転し、上記第1回転軸体の回転によって上記第1および第2被駆動体を上記第1中心軸周りに回転させ、
上記第1回転軸体および上記第2回転軸体の回転数差に応じて、上記第1中心軸を中心軸とする円筒座標系の径方向に延びる第2中心軸周りに上記第2被駆動体を回転させる、請求項1に記載の回転駆動装置。
【請求項3】
上記第2中心軸は、上記第1被駆動体を貫通している、請求項2に記載の回転駆動装置。
【請求項4】
上記第1回転軸体によって支持されており、かつ上記第2中心軸に対して平行に配置された第3回転軸体をさらに備えており、
上記第2回転軸体と上記第2被駆動体とは、上記第3回転軸体を介して連結されている、請求項3に記載の回転駆動装置。
【請求項5】
上記第1回転軸体と上記第2回転軸体とは、一方が他方の内部に挿通された断面同心円状とされている、請求項4に記載の回転駆動装置。
【請求項6】
上記第2回転軸体は、ベベルギアを介して上記第3回転軸体に連結されている、請求項5に記載の回転駆動装置。
【請求項7】
上記第1回転軸体および上記第2回転軸体のさらに内部に挿通されており、上記第1回転軸体とともに上記第1中心軸周りに回転する回転接続子を有する給電軸をさらに備える、請求項5または6に記載の回転駆動装置。
【請求項8】
上記第1回転軸体および上記第2回転軸体のいずれか一方に連結された第1モータと、
上記第1モータに連結された入力軸、上記第1回転軸体および上記第2回転軸体のいずれか他方に連結された出力軸、および上記出力軸の回転数と上記入力軸の回転数とに差を生じさせる差動軸を有する差動減速器と、
上記差動減速器の上記差動軸に連結された第2モータと、
をさらに備える、請求項1ないし7のいずれかに記載の回転駆動装置。
【請求項9】
上記第2モータの回転量を検出する回転量検出手段をさらに備える、請求項8に記載の回転駆動装置。
【請求項10】
上記第1回転軸体および上記第2回転軸体のいずれか一方に連結された第1モータと、
上記第1回転軸体および上記第2回転軸体の他方に連結された第2モータと、
をさらに備える、請求項1ないし7のいずれかに記載の回転駆動装置。
【請求項11】
請求項1ないし10のいずれかに記載の回転駆動装置と、
誘電体を用いて比誘電率が半径方向に所定の割合で変化するように形成された電波レンズと、
上記電波レンズの焦点部にあわせて配置された一次放射器とを備え、
上記第1被駆動体である電波レンズ、および上記第2被駆動体である一次放射器は、アジマス軸である第1中心軸を回転中心とする上記第1回転軸体により、アジマス軸周りに回転可能に支持され、
上記一次放射器はさらに、エレベーション軸であり上記電波レンズの中心を通る第2中心軸周りに回転可能に支持される、電波レンズアンテナ装置。
【請求項12】
上記電波レンズおよび一次放射器をカバーするレドームをさらに備え、
上記レドームは、モータ室上に固定して支持され、
上記第1回転軸体は、上記レドームと上記モータ室との間の隔壁に設けられた開口に挿通された、請求項11に記載の電波レンズアンテナ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−10245(P2012−10245A)
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願番号】特願2010−146183(P2010−146183)
【出願日】平成22年6月28日(2010.6.28)
【出願人】(000153672)株式会社住友金属ファインテック (35)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願日】平成22年6月28日(2010.6.28)
【出願人】(000153672)株式会社住友金属ファインテック (35)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]