
回転駆動装置及び画像形成装置
【課題】エンコーダセンサによって検出した回転速度に含まれる誤差成分を除去するためのデジタル演算処理に要する演算負荷及びメモリ資源の低減を図る。
【解決手段】前記モータ側ギアと前記駆動対象側ギアとのギア比が整数となるように両ギ
アの歯数を設定する共に、前記駆動対象物の1回転当たり前記エンコーダセンサから出力
されるパルス数が前記駆動対象側ギアの歯数の整数倍となるように前記エンコーダ板を設
定する。
【解決手段】前記モータ側ギアと前記駆動対象側ギアとのギア比が整数となるように両ギ
アの歯数を設定する共に、前記駆動対象物の1回転当たり前記エンコーダセンサから出力
されるパルス数が前記駆動対象側ギアの歯数の整数倍となるように前記エンコーダ板を設
定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転駆動装置及び画像形成装置に関する。
【背景技術】
【0002】
プリンタやコピー機等の画像形成装置で使用されるドラムユニット等の回転駆動装置では、駆動対象物(例えば感光体ドラム)の回転動力を得るためにモータを用いているが、このモータの回転数及びトルクの都合上、モータ軸からギアを介して駆動対象物へ回転動力を伝達する構成を採用することが一般的である。
【0003】
このような構成を採用する場合、駆動対象物の回転軸にエンコーダ板を取り付け、エンコーダセンサ(例えば光センサ)によって検出した駆動対象物の回転速度をCPU等の制御部にフィードバックすることにより、駆動対象物の回転速度を一定に保つようにモータ制御を行う。エンコーダのパルス数については位相の精度や制御点によって必要な数量が決定されており、CPU等の制御部ではより高精度な回転性能を得るために様々なフィルタリング処理や補正処理などのデジタル演算処理を行っている。
【0004】
例えば、デジタル演算処理におけるフィルタリング処理としては、駆動対象物の回転軸に対するエンコーダ板の取り付け誤差(偏芯)に起因して生じる偏芯成分(エンコーダセンサによって検出した回転速度に含まれる、駆動対象物の回転軸の1回転当たり1周期の正弦波状の誤差成分)や、駆動対象物の回転軸とモータの回転軸とを連結するギア部の噛合いによる振動に起因するギア一歯成分(エンコーダセンサによって検出した回転速度に含まれる、ギア1歯当たり1周期の正弦波状の誤差成分)を除去するためにデジタルコムフィルタを用いる。また、デジタル演算処理における補正処理としては、モータの軸芯ズレに起因して生じる偏芯成分(エンコーダセンサによって検出した回転速度に含まれる、モータピニオンの1回転当たり1周期の正弦波状の誤差成分)を、予めメモリに記憶していた補正値を使用してフィードフォワードにより相殺する。
【特許文献1】特開2005−345906号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記のようなデジタル演算処理はCPUやDSP等の制御部で行われるが、精度向上のためにより高次の演算が必要となり、演算処理に要する時間が長くなったり(制御部の演算負荷が増大する)、演算処理に要するメモリ資源が増大するという問題がある。
【0006】
本発明は、上述した事情に鑑みてなされたものであり、エンコーダセンサによって検出した回転速度に含まれる誤差成分を除去するためのデジタル演算処理に要する演算負荷及びメモリ資源の低減を図ることの可能な回転駆動装置及び画像形成装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明は、回転駆動装置に係る第1の解決手段として、
駆動対象物の回転軸に設けられたエンコーダ板及び当該エンコーダ板の回転速度に応じた
パルス信号を出力するエンコーダセンサを有するエンコーダと、前記駆動対象物を回転駆
動するモータと、前記モータの回転軸に設けられたモータ側ギアと、当該モータ側ギアと
噛合うと共に前記駆動対象物の回転軸に設けられた駆動対象側ギアと、前記エンコーダセ
ンサの出力信号を基に前記モータをフィードバック制御する制御部とを備える回転駆動装
置であって、前記モータ側ギアと前記駆動対象側ギアとのギア比が整数となるように両ギ
アの歯数が設定されていると共に、前記駆動対象物の1回転当たり前記エンコーダセンサ
から出力されるパルス数が前記駆動対象側ギアの歯数の整数倍となるように前記エンコー
ダ板が設定されていることを特徴とする。
【0008】
また、回転駆動装置に係る第2の解決手段として、上記第1の解決手段において、前記駆動対象物の1回転につき前記エンコーダセンサから出力されるパルス数が前記駆動対象側ギアの歯数の整数倍且つ偶数となるように前記エンコーダ板が設定されていることを特徴とする。
【0009】
また、本発明は、画像形成装置に係る第1の解決手段として、駆動対象物の回転軸に設けられたエンコーダ板及び当該エンコーダ板の回転速度に応じたパルス信号を出力するエンコーダセンサを有するエンコーダと、前記駆動対象物を回転駆動するモータと、前記モータの回転軸に設けられたモータ側ギアと、当該モータ側ギアと噛合うと共に前記駆動対象物の回転軸に設けられた駆動対象側ギアと、前記エンコーダセンサの出力信号を基に前記モータをフィードバック制御すると共に電子写真方式による画像形成動作を統合制御する制御部とを備える画像形成装置であって、前記モータ側ギアと前記駆動対象側ギアとのギア比が整数となるように両ギアの歯数が設定されていると共に、前記駆動対象物の1回転当たり前記エンコーダセンサから出力されるパルス数が前記駆動対象側ギアの歯数の整数倍となるように前記エンコーダ板が設定されていることを特徴とする。
【0010】
また、画像形成装置に係る第2の解決手段として、上記第1の解決手段において、前記駆動対象物の1回転につき前記エンコーダセンサから出力されるパルス数が前記駆動対象側ギアの歯数の整数倍且つ偶数となるように前記エンコーダ板が設定されていることを特徴とする。
【0011】
また、画像形成装置に係る第3の解決手段として、上記第1または第2の解決手段において、前記駆動対象物は感光体ドラムであることを特徴とする。
【発明の効果】
【0012】
本発明によれば、前記モータ側ギアと前記駆動対象側ギアとのギア比が整数となるように両ギアの歯数が設定されていると共に、前記駆動対象物の1回転当たり前記エンコーダセンサから出力されるパルス数が前記駆動対象側ギアの歯数の整数倍となるように設定されているため、エンコーダセンサによって検出した回転速度に含まれる誤差成分を除去するためのデジタル演算処理に要する演算負荷及びメモリ資源の低減を図ることが可能となる。
【発明を実施するための最良の形態】
【0013】
以下、図面を参照して、本発明の一実施形態について説明する。
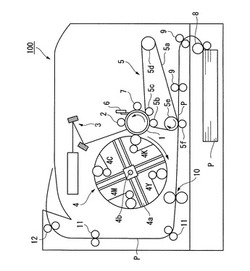
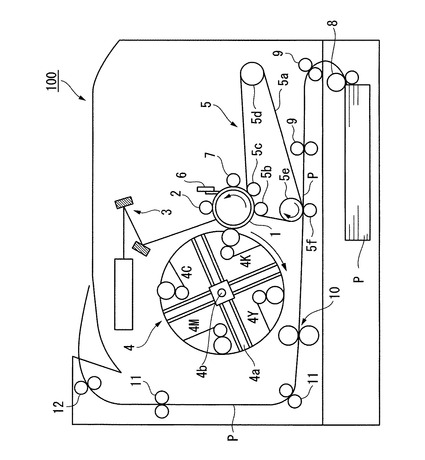
図1は、本実施形態に係る画像形成装置100の概略構成図である。本実施形態に係る画像形成装置100は、例えば電子写真方式を用いたフルカラープリンタであり、感光体ドラム1、帯電部2、露光部3、現像部4、転写部5、クリーニングブレード6、摺擦ローラ7、給紙ローラ8、用紙搬送ローラ9、定着ユニット10、用紙搬送ローラ11及び排紙ローラ12から概略構成されている。
【0014】
感光体ドラム1は、その表面に静電潜像を形成するための回転感光体である。詳細は後述するが、この感光体ドラム1は、その回転軸がDCブラシレスモータの回転軸とギアを介して連結されており、DCブラシレスモータによって回転駆動されるものである。帯電部2は、感光体ドラム1の上方に設置されており、感光体ドラム1の表面を一様に帯電させるものである。露光部3はレーザ照射ユニットから構成されており、帯電部2によって帯電された感光体ドラム1の表面にレーザ光を照射することにより、静電潜像を形成するものである。
【0015】
現像部4は、静電潜像が形成された感光体ドラム1の表面に各色のトナーを供給してトナー像を形成するものである。具体的には、この現像部4は、ロータリラック4aと、このロータリラック4aの円周方向に90度間隔で配設された、イエロー用トナーを供給する現像器4Y、マゼンタ用トナーを供給する現像器4M、シアン用トナーを供給する現像器4C、ブラック用トナーを供給する現像器4Kとから構成されている。ロータリラック4aは、回転軸4bを中心に回転しながら各色の現像器4Y、4M、4C、4Kを感光体ドラム1に対向する現像位置に順次移動させて現像(トナー供給)を行わせるものである。
【0016】
転写部5は、感光体ドラム1のトナー像を用紙Pに転写するものであり、中間転写ベルト5a、一次転写ローラ5b及び5c、駆動ローラ5d、二次転写対向ローラ5e、二次転写ローラ5fから構成されている。中間転写ベルト5aは、一次転写ローラ5b及び5c、駆動ローラ5d、二次転写対向ローラ5eにエンドレス状に巻きかけられ、駆動ローラ5dによって駆動されており、感光体ドラム1に形成されたトナー像が転写され一時的に保持される転写体の役割を担っている。二次転写ローラ5fは、中間転写ベルト5aの外周面において二次転写対向ローラ5eに対向する位置に配置され、中間転写ベルト5aに一次転写されたトナー像を用紙Pに二次転写する役割を担っている。
【0017】
クリーニングブレード6は、感光体ドラム1の表面に残留した残留現像剤などの付着物をクリーニングするものであり、例えばウレタンゴムを感光体ドラム1に圧接している。摺擦ローラ7は、感光体ドラム1の表面に当接して、トナーを回収したり吐き出したりするバッファの機能を有している。この摺擦ローラ7は、金属シャフトの周りを発泡ゴムで覆った構成となっており、バネ(図示略)により感光体ドラム1に付勢されている。
【0018】
給紙ローラ8は、用紙カセットに積載された用紙Pを1枚ずつ給紙するためのローラである。この給紙ローラ8によって給紙された用紙Pは、用紙搬送ローラ9によって二次転写対向ローラ5eと二次転写ローラ5fとの間に搬送されてトナー像が転写された後、定着ユニット10に搬送される。定着ユニット10は、回転自在に配設された定着体たる加熱ローラ10aと、加熱ローラ10aに圧接しながら回転する加圧体たる加圧ローラ10bとから構成されている。この定着ユニット10に搬送された用紙Pは、加熱ローラ10aと加圧ローラ10bとの間を通過する際に表裏両面から一定の温度、圧力で加熱及び加圧される。これにより、用紙P上のトナー像は溶融して定着し、用紙Pにフルカラー画像が形成される。定着処理後の用紙Pは、用紙搬送ローラ11によって排紙ローラ12に搬送され、排紙ローラ12によって外部に設置された排紙トレイに排紙される。
【0019】
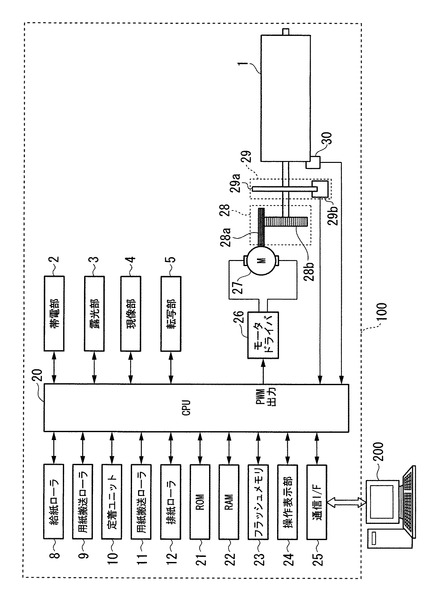
図2は、上述した画像形成装置100の機能ブロック構成図である。なお、この図2において、図1と同じ構成要素には同一符号を付し、説明を省略する。図2において、符号20はCPU(Central Processing Unit:制御部)、符号21はROM(Read Only Memory)、符号22はRAM(Random Access Memory)、符号23はフラッシュメモリ、符号24は操作表示部、符号25は通信I/F、符号26はモータドライバ、符号27はDCブラシレスモータ、符号28はギア部、符号29はエンコーダ、符号30は基準位置センサである。また、符号200は、外部から画像形成装置100へ印刷指示するためのPC(Personal Computer)である。
【0020】
CPU20は、ROM21に記憶されている制御プログラムを実行し、フラッシュメモリ23に記憶されている画像データ、操作表示部24から入力される操作信号、エンコーダ29(詳細にはエンコーダセンサ29b)から入力されるパルス信号、基準位置センサ30から入力される基準位置信号、通信I/F25を介してPC200から受信した印刷指示信号及び印刷用画像データ(つまり印刷ジョブ)に基づいて、画像形成装置100内部の各機能部(感光体ドラム1、帯電部2、露光部3、現像部4、転写部5、給紙ローラ8、用紙搬送ローラ9、定着ユニット10、用紙搬送ローラ11及び排紙ローラ12を含む)を統合制御するものである。
【0021】
このCPU20は、感光体ドラム1の回転駆動制御として、エンコーダ29(詳細にはエンコーダセンサ29b)から割込み入力されるパルス信号をソフトウェアカウンタによってカウントすることにより、感光体ドラム1の回転速度を検出し、当該検出した回転速度が予め設定されている目標回転速度と一致するように(言い換えれば目標回転速度と回転速度との速度偏差量が零となるように)PID演算を行い、当該PID演算によって得られる操作量に応じたPWM(Pulse Width Modulation)信号をモータドライバ26に出力する機能(つまりDCブラシレスモータ27をPID制御する機能)を有している。
【0022】
ROM21は、CPU20で使用される制御プログラムやその他の設定データ(例えばPID制御で用いられる目標回転速度や比例ゲイン定数Kp、積分ゲイン定数Ki、微分ゲイン定数Kdなど)を記憶する不揮発性メモリである。RAM22は、CPU20が制御プログラムを実行して各種動作を行う際に、データの一時保存先に用いられる揮発性のワーキングメモリである。フラッシュメモリ23は、PC200から送信される画像データを記憶するために用いられる書き換え可能な不揮発性メモリである。
【0023】
操作表示部24は、例えばタッチパネルによって構成されており、CPU20の制御の下、各種操作キーや各種情報を報知する画面を表示すると共に、タッチパネル上に表示される各種操作キーの操作入力情報を操作信号としてCPU20に出力する。通信I/F25は、画像形成装置100(詳しくはCPU20)と外部のPC200との間で通信を行うためのインタフェースであり、LAN(Local Area Network)等のネットワークによってPC200と接続されている。
【0024】
モータドライバ26は、CPU20から入力されるPWM信号に応じて、DCブラシレスモータ27に印加する直流駆動電圧をオン/オフする半導体スイッチング素子を備えており、PWM信号と同一のデューティ比を有する直流駆動電圧をDCブラシレスモータ27に供給する。DCブラシレスモータ27は、モータドライバ26から供給される直流駆動電圧によって回転動作するモータであり、その回転軸はギア部28を介して感光体ドラム1の回転軸と連結されている。
【0025】
ギア部28は、DCブラスレスモータ27の回転軸に設けられたピニオン28a(モータ側ギア)と、当該ピニオン28aと噛合うと共に感光体ドラム1の回転軸に設けられたギア28b(駆動対象側ギア)とから構成されている。
【0026】
エンコーダ29は、感光体ドラム1の回転軸に設けられ、感光体ドラム1と同期回転するエンコーダ板29aと、エンコーダ板29aを挟み込むように配置されたエンコーダセンサ(例えば光センサ)29bとから構成されており、エンコーダセンサ29bはエンコーダ板29aの周方向に沿って複数形成されているスリットが光を通過した際に矩形波状のパルス信号を出力する。つまり、エンコーダセンサ29bは、感光体ドラム1の回転速度に応じたパルス信号をCPU20に出力する。
【0027】
基準位置センサ30は、例えば光センサであり、感光体ドラム1の円周方向の1箇所に設けられた基準マークが光を通過した際に矩形波状のパルス信号(基準位置信号)をCPU20に出力する。つまり、この基準位置センサ30は、感光体ドラム1が1回転する毎に1パルスの基準位置信号を出力する。CPU20は、この基準位置信号を基に感光体ドラム1が1回転した期間を把握することができる。
【0028】
なお、上記の構成要素の内、少なくともCPU20、ROM21、RAM22、フラッシュメモリ23、モータドライバ26、DCブラシレスモータ27、ギア部28、エンコーダ29、基準位置センサ30及び感光体ドラム1は、回転駆動装置を構成するものである。
【0029】
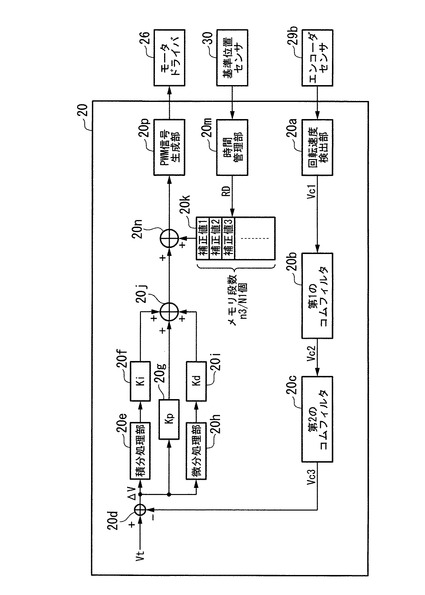
図3は、CPU20におけるPID制御に関するデジタル演算処理を表す機能ブロック
図である。この図3において、回転速度検出部20aは、エンコーダセンサ29bから割
込み入力されるパルス信号をソフトウェアカウンタによってカウントすることにより、感
光体ドラム1の回転速度Vc1を検出する。
【0030】
第1のコムフィルタ20bは、回転速度検出部20aによって検出された回転速度V
c1に含まれる、感光体ドラム1の回転軸に対するエンコーダ板29aの取り付け誤差(
偏芯)に起因して生じる偏芯成分(感光体ドラム1の回転軸の1回転当たり1周期の正弦
波状の誤差成分)を除去する。なお、以下では、エンコーダ板29aの偏芯成分除去後の
回転速度をVc2とする。第2のコムフィルタ20cは、回転速度Vc2に含まれる、感
光体ドラム1の回転軸とDCブラシレスモータの回転軸とを連結するギア部28の噛合い
による振動に起因するギア1歯成分(ギア28bの1歯周期当たり1周期の正弦波状の誤
差成分)を除去する。なお、以下では、ギア一歯成分除去後の回転速度をVc3とする。
【0031】
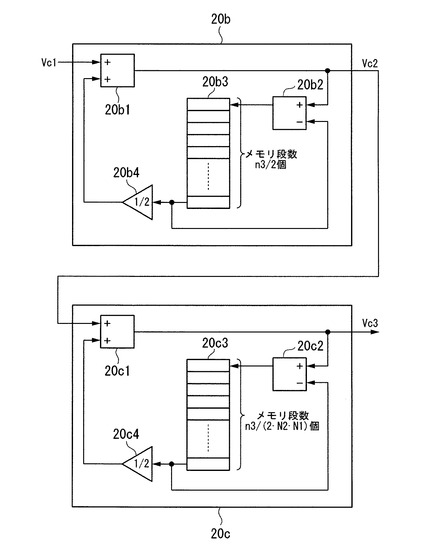
図4に、上記の第1のコムフィルタ20b及び第2のコムフィルタ20cの詳細な機能ブロックを示す。この図4に示すように、第1のコムフィルタ20bにおいて、加算処理部20b1は、回転速度検出部20aによって検出された回転速度Vc1と乗算処理部20b4の演算値との加算処理を行う。なお、この加算処理部20b1の加算値が回転速度Vc2となる。減算処理部20b2は、加算処理部20b1の加算値(回転速度Vc2)から遅延処理部20b3の出力値を減算し、その減算値を遅延処理部20b3の入力値とする。
【0032】
遅延処理部20b3は、FIFO(First-In First-Out)により、減算処理部20b2
の減算値を順次格納すると共に最初に格納した減算値から順次出力する。この遅延処理部
20b3にて減算値を順次格納するために使用されるメモリ段数は、コムフィルタの特性
パラメータである入力信号(ここでは回転速度Vc1)の遅延量に応じて設定されている。
つまり、このメモリ段数(遅延量)は、回転速度Vc1に含まれるエンコーダ板29aの
偏芯成分を除去可能な値に設定されている。乗算処理部20b4は、遅延処理部20b3
の出力値にデータ正規化用の1/2を乗算するものである。
【0033】
一方、図4に示すように、第2のコムフィルタ20cも第1のコムフィルタ20bと同
様な機能ブロックである、加算処理部20c1、減算処理部20c2、遅延処理部20c
3及び乗算処理部20c4から構成されている。ここで、第2のコムフィルタ20cが第
1のコムフィルタ20bと異なる点は、加算処理部20c1が第1のコムフィルタ20b
の出力値である回転速度Vc2を入力とし、加算処理の結果である回転速度Vc3を出力
値とする点と、遅延処理部20c3にて減算処理部20c2の減算値を順次格納するため
に使用されるメモリ段数(遅延量)は、回転速度Vc2に含まれる、ギア1歯成分を除去
可能な値に設定されている点である。
【0034】
以下、図3に戻って説明を続ける。
速度偏差算出部20dは、感光体ドラム1の目標回転速度Vtと回転速度Vc3との差(速度偏差量)ΔVを算出する。積分処理部20eは、速度偏差算出部20dにて算出される速度偏差量ΔVの積分処理を行う。積分ゲイン乗算部20fは、積分処理部20eによる積分処理結果に積分ゲイン定数Kiを乗算する。比例ゲイン乗算部20gは、速度偏差算出部20dにて算出される速度偏差量ΔVに比例ゲイン定数Kpを乗算する。微分処理部20hは、速度偏差算出部20dにて算出される速度偏差量ΔVの微分処理を行う。微分ゲイン乗算部20iは、微分処理部20hによる微分処理結果に微分ゲイン定数Kdを乗算する。加算処理部20jは、積分ゲイン乗算部20f、比例ゲイン乗算部20g及び微分ゲイン乗算部20iのそれぞれの演算値を加算し、その加算値をDCブラシレスモータ27に対する操作量Cont1とする。
【0035】
補正用メモリ20kは、DCブラシレスモータ27の軸芯ズレに起因して生じる偏芯成分(エンコーダセンサ28bによって検出した回転速度Vc1に含まれる、ピニオン28aの1回転当たり1周期の正弦波状の誤差成分)を補正するための補正値を予め記憶しているメモリである。なお、この補正値はピニオン28aの回転位置と対応付けられて複数設定されており、補正用メモリ20mではピニオン28aの回転位置に対応するアドレスにその回転位置に応じた補正値が格納されている。また、この補正用メモリ20kは、時間管理部20mから入力されるリードアドレスRDに対応するメモリ領域に格納されている補正値をフィードフォワード部20nに出力する。
【0036】
時間管理部20mは、基準位置センサ30から割込み入力される基準位置信号の入力時点(つまり感光体ドラム1の1回転期間の開始時点)を基準として経過時間を監視し、ある経過時間に対応するピニオン28aの回転位置に応じたアドレスをリードアドレスRDとして補正用メモリ20kに出力する。フィードフォワード部20nは、加算処理部20jの演算結果である操作量Cont1に補正用メモリ20kから出力される補正値を加算し、その加算結果を最終的な操作量Cont2とする。PWM信号生成部20pは、フィードフォワード部20nから得られる操作量Cont2に応じたPWM信号を生成して、モータドライバ26に出力する。
以上が、CPU20におけるPID制御に関するデジタル演算処理を表す機能ブロックの説明である。
【0037】
ところで、上記のように構成された本実施形態に係る画像形成装置100では、ピニオン28aとギア28bとのギア比が整数となるように両ギアの歯数が設定されていると共に、感光体ドラム1の1回転当たりエンコーダセンサ29bから出力されるパルス数がギア28bの歯数の整数倍且つ偶数となるように、エンコーダ板29aのスリット数が設定されていることを特徴としている。
【0038】
具体的には、ピニオン28aの歯数をn1、ギア28bの歯数をn2、ピニオン28a
とギア28bとのギア比をN1、エンコーダ板29aのスリット数(感光体ドラム1の1
回転当たりエンコーダセンサ29bから出力されるパルス数)をn3とすると、下記関係
式(1)及び(2)が成立する。
n2=N1・n1 (N1は整数) ・・・・・(1)
n3=N2・n2 (N2は整数、n3は偶数) ・・・・・(2)
このように設定した場合、ギア28bの1回転(つまり感光体ドラム1の1回転)当た
りエンコーダセンサ29bから出力されるパルス数はn3となり、ギア28bの1歯周期
当たりエンコーダセンサ29bから出力されるパルス数はn3/(N2・N1)となり、
ピニオン28aの1回転(つまりDCブラスレスモータ27の1回転)当たりエンコーダ
センサ29bから出力されるパルス数はn3/N1となる。
【0039】
上記関係式(1)及び(2)が成立するように、ピニオン28a及びギア28bの歯数
(n1、n2)、及びエンコーダ板29aのスリット数n3を設定することにより、上述
した補正用メモリ20mのメモリ段数を低減することができ、その結果、CPU20の演
算負荷を低減することが可能となる。また、第1のコムフィルタ20b及び第2のコムフ
ィルタ20cの設計が容易となる。
【0040】
以下、このような効果が得られる理由について、画像形成装置100(特にCPU2
0)の動作と共に説明する。
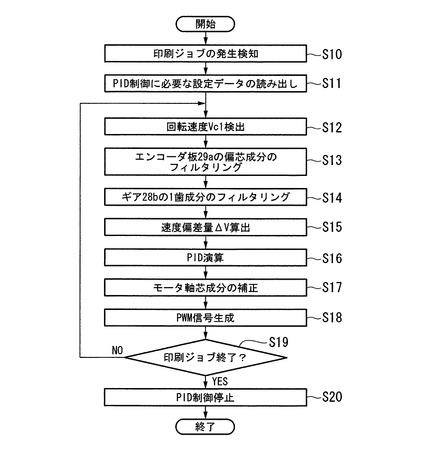
図5は、CPU20の動作を表すフローチャートである。この図5に示すように、CPU20は、PC200から印刷指示信号及び印刷用画像データを受信して、印刷ジョブの発生を検知すると(ステップS10)、ROM21からPID制御で用いられる設定データ(感光体ドラム1の目標回転速度Vt、比例ゲイン定数Kp、積分ゲイン定数Ki、微分ゲイン定数Kd)を読み出す(ステップS11)。
【0041】
そして、CPU20(回転速度検出部20a)は、エンコーダセンサ29bから割込み入力されるパルス信号をソフトウェアカウンタによってカウントすることにより、感光体ドラム1の回転速度Vc1を検出する(ステップS12)。この回転速度Vc1は、エンコーダセンサ29bから入力される1パルス毎に、その1パルスに対応する今回値として得られるものである。また、この回転速度Vc1の検出処理と並列的に、CPU20(時間管理部20m)は、基準位置センサ30から割込み入力される基準位置信号の入力時点(つまり感光体ドラム1の1回転期間の開始時点)を基準として経過時間の監視を開始する。
【0042】
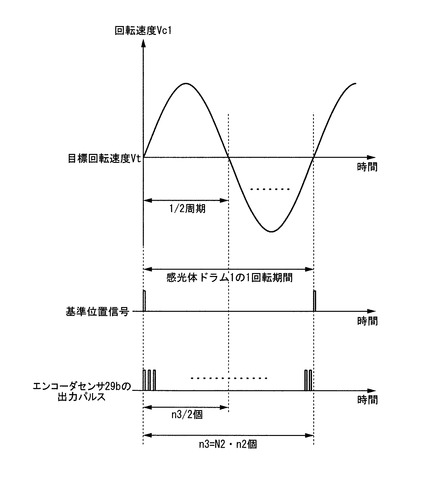
図6は、感光体ドラム1の1回転期間において、エンコーダセンサ29bの出力信号
から得られる回転速度Vc1の検出結果と基準位置信号とエンコーダセンサ29bから出力されるパルス数n3との対応関係を表したものである。この図6に示すように、回転速度Vc1には、感光体ドラム1の回転軸に対するエンコーダ板29aの取り付け誤差(偏芯)に起因して生じる偏芯成分(感光体ドラム1の回転軸の1回転当たり1周期の正弦波状の誤差成分)が含まれている。
【0043】
続いて、CPU20(第1のコムフィルタ20b)は、図6に示すような回転速度Vc1に含まれるエンコーダ板29aの偏芯成分を除去する(ステップS13)。図6に示すような周期を有するエンコーダ板29aの偏芯成分を第1のコムフィルタ20bで除去するためには、コムフィルタの特性パラメータである入力信号(ここでは回転速度Vc1)の遅延量を、エンコーダ板29aの偏芯成分の1/2周期(言い換えれば感光体ドラム1の1回転周期の1/2周期)に設定すれば良い。つまり、第1のコムフィルタ20bにおける遅延処理部20b3のメモリ段数をn3/2個に設定すれば良い。ここで、上述したように、エンコーダセンサ29bから出力されるパルス数(エンコーダ板29aのスリット数)n3が偶数となるように設定しているため、第1のコムフィルタ20bの設計を容易にすることができる。
【0044】
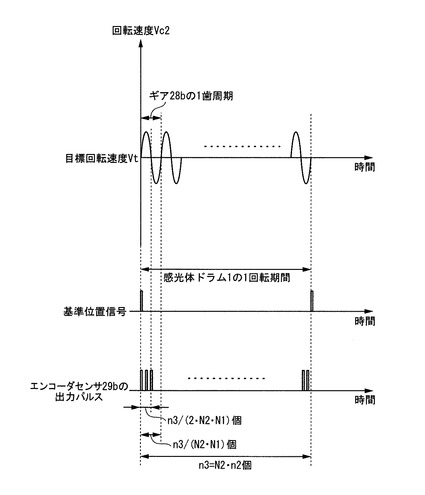
続いて、CPU20(第2のコムフィルタ20c)は、エンコーダ板29aの偏芯成分除去後の回転速度Vc2に含まれるギア28bの1歯成分を除去する(ステップS14)。
図7は、感光体ドラム1の1回転期間において、回転速度Vc2と基準位置信号とエンコーダセンサ29bから出力されるパルス数n3との対応関係を表したものである。図7に示すように、回転速度Vc2には、感光体ドラム1の回転軸とDCブラシレスモータの回転軸とを連結するギア部28の噛合いによる振動に起因するギア1歯成分(ギア28bの1歯周期当たり1周期の正弦波状の誤差成分)が含まれている。
【0045】
上述したように、本実施形態に係る画像形成装置100では、上記関係式(1)及び(2)が成立するように設定しているため、ギア28bの1歯周期当たりエンコーダセンサ29bから出力されるパルス数はn3/(N2・N1)となる。言い換えれば、回転速度Vc2に含まれるギア28bの1歯成分の1周期は、n3/(N2・N1)に相当することになる。従って、図7に示すような周期を有するギア28bの1歯成分を第2のコムフィルタ20cで除去するためには、コムフィルタの特性パラメータである入力信号(ここでは回転速度Vc2)の遅延量を、ギア28bの1歯成分の1/2周期に設定すれば良い。つまり、第2のコムフィルタ20cにおける遅延処理部20c3のメモリ段数をn3/(2・N2・N1)個に設定すれば良い。ここで、上述したように、エンコーダセンサ29bから出力されるパルス数(エンコーダ板29aのスリット数)n3が偶数となるように設定しているため、第2のコムフィルタ20cの設計を容易にすることができる。
【0046】
続いて、CPU20(速度偏差算出部20d)は、ギア28bの1歯成分除去後の回転速度Vc3と目標回転速度Vtとの速度偏差量ΔVを算出する(ステップS15)。そして、CPU20(積分処理部20e、積分ゲイン乗算部20f、比例ゲイン乗算部20g、微分処理部20h、微分ゲイン乗算部20i及び加算処理部20j)は、速度偏差量ΔVが零となるように、比例ゲイン定数Kp、積分ゲイン定数Ki、微分ゲイン定数Kdを用いてPID演算を行って操作量Cont1を算出する(ステップS16)。
【0047】
続いて、CPU20(フィードフォワード部20n)は、操作量Cont1に補正用メモリ20kから出力される補正値を加算することにより、DCブラシレスモータ27の軸芯ズレに起因して生じる偏芯成分を除去(補正)する(ステップS17)。ここで、CPU20(時間管理部20m)は、基準位置信号を基に感光体ドラム1の1回転周期の開始時点からの経過時間を監視しており、ある経過時間に対応するピニオン28aの回転位置に応じたリードアドレスRDを補正用メモリ20kに出力し、補正用メモリ20kは、リードアドレスRDに対応するメモリ領域に格納されている補正値をフィードフォワード部20nに出力するという処理を並列的に行っている。
【0048】
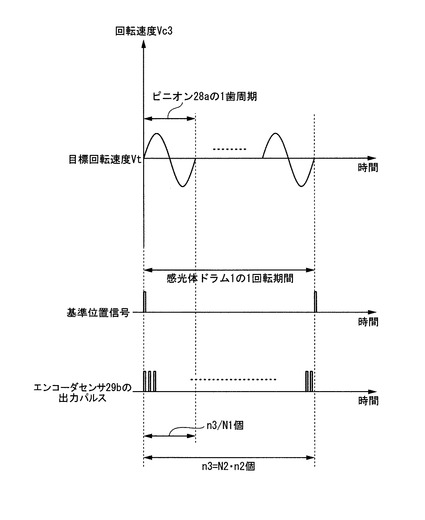
図8は、感光体ドラム1の1回転期間において、回転速度Vc3と基準位置信号とエンコーダセンサ29bから出力されるパルス数n3との対応関係を表したものである。図8に示すように、回転速度Vc3には、DCブラシレスモータ27の軸芯ズレに起因して生じる偏芯成分(ピニオン28aの1回転当たり1周期の正弦波状の誤差成分)が含まれている。操作量Cont1は、この回転速度Vc3を基に演算されたものであるため、当然このDCブラシレスモータ27の偏芯成分を含んでいる。
【0049】
上述したように、本実施形態に係る画像形成装置100では、上記関係式(1)及び(2)が成立するように設定しているため、ピニオン28aの1回転周期当たりエンコーダセンサ29bから出力されるパルス数はn3/N1となる。言い換えれば、回転速度Vc3に含まれるDCブラシレスモータ27の偏芯成分の1周期は、n3/N1に相当することになる。従って、図8に示すような周期を有するDCブラシレスモータ27の偏芯成分を補正するための補正値はn3/N1個あれば足り(つまり補正用メモリ20kのメモリ段数もn3/N1個あれば良い)、このn3/N1個の補正値を感光体ドラム1の1回転につきN1回繰り返し使用することにより、感光体ドラム1の1回転周期内に含まれるDCブラシレスモータ27の偏芯成分を除去することができる。
【0050】
続いて、CPU20(PWM信号生成部20p)は、上記補正処理後の操作量Cont2に応じたPWM信号を生成してモータドライバ26に出力することにより、DCブラシレスモータ27のPID制御を行う(ステップS18)。そして、CPU20は、印刷ジョブが終了したか否かを判定し(ステップS19)、印刷ジョブが終了していない場合(「No」)、ステップS12の処理に戻る。CPU20は、印刷ジョブが終了するまでの期間(つまりステップS19で印刷ジョブの終了判定が発生するまでの期間)は、ステップS12〜S19の処理をループすることにより、感光体ドラム1の回転速度Vc1の検出結果に含まれる各種の誤差成分を除去及び補正しつつ、PID制御を継続する。
【0051】
また、図5には図示していないが、CPU20は、感光体ドラム1が目標回転速度Vtに安定すると、給紙ローラ8及び用紙搬送ローラ9を制御することにより、用紙カセットから用紙Pを二次転写対向ローラ5eと二次転写ローラ5fとの間に搬送すると共に、帯電部2、露光部3、現像部4、転写部5を制御することにより、感光体ドラム1に形成したトナー像を用紙Pに転写し、さらに定着ユニット10を制御して用紙P上のトナーを定着させた後、用紙搬送ローラ11及び排紙ローラ12を制御して、フルカラー画像が形成(印刷)された用紙Pを排紙トレイに排紙する、という画像形成処理を並列的に行っている。
【0052】
このような画像形成処理により印刷ジョブが終了し、ステップS19において、印刷ジョブが終了したと判定された場合(「Yes」)、CPU20は、DCブラシレスモータ27のPID制御を停止して感光体ドラム1の回転駆動制御を終了する(ステップS20)。
【0053】
以上のように、本実施形態に係る画像形成装置100によれば、エンコーダセンサ29bの出力パルス信号を基に検出した回転速度Vc1に含まれる誤差成分を施すデジタル演算処理に要するメモリ資源(特に補正用メモリ20k)の低減及び演算負荷の低減を図ることが可能である。また、フィルタリング処理で使用する第1のコムフィルタ20b及び第2のコムフィルタ20cの設計を容易にすることができる。
【0054】
なお、本発明は上記実施形態に限定されず、以下のような変形例が考えられる。
(1)上記実施形態では、感光体ドラム1の1回転当たりエンコーダセンサ29bから出力されるパルス数がギア28bの歯数n3の整数倍且つ偶数となるように、エンコーダ板29aのスリット数n3を設定したが、例えばエンコーダ板29aの偏芯成分、ギア28bの1歯成分のフィルタリング処理にコムフィルタを使用しない場合は、感光体ドラム1の1回転当たりエンコーダセンサ29bから出力されるパルス数がギア28bの歯数n3の整数倍となるように、エンコーダ板29aのスリット数n3を設定しても良い。このように設定することにより、少なくともDCブラシレスモータ27の偏芯成分を補正するための補正値を格納する補正用メモリ20kのメモリ段数を低減できるとい効果は得られる。
【0055】
(2)上記実施形態では、駆動対象物として感光体ドラム1を例示して説明したが、他の駆動対象物であってエンコーダによって回転速度を検出するものであれば本発明を適用することができる。また、上記実施形態では、画像形成装置100としてプリンタを例示して説明したが、この他、コピー機、プリンタ及びFAX等の機能を有する複合機や、コピー機、FAX等の単体のOA機器などにも本発明を適用することができる。
【図面の簡単な説明】
【0056】
【図1】本発明の一実施形態に係る画像形成装置100の構成概略図である。
【図2】本発明の一実施形態に係る画像形成装置100の機能ブロック図である。
【図3】本発明の一実施形態に係る画像形成装置100におけるCPU20の詳細な機能ブロック図である。
【図4】本発明の一実施形態に係る画像形成装置100におけるCPU20の第1のコムフィルタ20b及び第2のコムフィルタ20cの詳細な機能ブロック図である。
【図5】本発明の一実施形態に係る画像形成装置100(CPU20)の動作に関するフローチャートである。
【図6】本発明の一実施形態に係る画像形成装置100の動作に関する第1説明図である。
【図7】本発明の一実施形態に係る画像形成装置100の動作に関する第2説明図である。
【図8】本発明の一実施形態に係る画像形成装置100の動作に関する第3説明図である。
【符号の説明】
【0057】
100…画像形成装置、1…感光体ドラム、2…帯電部、3…露光部、4…現像部、5…転写部、6…クリーニングブレード、7…摺擦ローラ、8…給紙ローラ、9…用紙搬送ローラ、10…定着ユニット、11…用紙搬送ローラ、12…排紙ローラ、20…CPU(Central Processing Unit)、21…ROM(Read Only Memory)、22…RAM(Random Access Memory)、23…フラッシュメモリ、24…操作表示部、25…通信I/F、26…モータドライバ、27…DCブラシレスモータ、28…ギア部、29…エンコーダ、30…基準位置センサ、200…PC(Personal Computer)
【技術分野】
【0001】
本発明は、回転駆動装置及び画像形成装置に関する。
【背景技術】
【0002】
プリンタやコピー機等の画像形成装置で使用されるドラムユニット等の回転駆動装置では、駆動対象物(例えば感光体ドラム)の回転動力を得るためにモータを用いているが、このモータの回転数及びトルクの都合上、モータ軸からギアを介して駆動対象物へ回転動力を伝達する構成を採用することが一般的である。
【0003】
このような構成を採用する場合、駆動対象物の回転軸にエンコーダ板を取り付け、エンコーダセンサ(例えば光センサ)によって検出した駆動対象物の回転速度をCPU等の制御部にフィードバックすることにより、駆動対象物の回転速度を一定に保つようにモータ制御を行う。エンコーダのパルス数については位相の精度や制御点によって必要な数量が決定されており、CPU等の制御部ではより高精度な回転性能を得るために様々なフィルタリング処理や補正処理などのデジタル演算処理を行っている。
【0004】
例えば、デジタル演算処理におけるフィルタリング処理としては、駆動対象物の回転軸に対するエンコーダ板の取り付け誤差(偏芯)に起因して生じる偏芯成分(エンコーダセンサによって検出した回転速度に含まれる、駆動対象物の回転軸の1回転当たり1周期の正弦波状の誤差成分)や、駆動対象物の回転軸とモータの回転軸とを連結するギア部の噛合いによる振動に起因するギア一歯成分(エンコーダセンサによって検出した回転速度に含まれる、ギア1歯当たり1周期の正弦波状の誤差成分)を除去するためにデジタルコムフィルタを用いる。また、デジタル演算処理における補正処理としては、モータの軸芯ズレに起因して生じる偏芯成分(エンコーダセンサによって検出した回転速度に含まれる、モータピニオンの1回転当たり1周期の正弦波状の誤差成分)を、予めメモリに記憶していた補正値を使用してフィードフォワードにより相殺する。
【特許文献1】特開2005−345906号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記のようなデジタル演算処理はCPUやDSP等の制御部で行われるが、精度向上のためにより高次の演算が必要となり、演算処理に要する時間が長くなったり(制御部の演算負荷が増大する)、演算処理に要するメモリ資源が増大するという問題がある。
【0006】
本発明は、上述した事情に鑑みてなされたものであり、エンコーダセンサによって検出した回転速度に含まれる誤差成分を除去するためのデジタル演算処理に要する演算負荷及びメモリ資源の低減を図ることの可能な回転駆動装置及び画像形成装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明は、回転駆動装置に係る第1の解決手段として、
駆動対象物の回転軸に設けられたエンコーダ板及び当該エンコーダ板の回転速度に応じた
パルス信号を出力するエンコーダセンサを有するエンコーダと、前記駆動対象物を回転駆
動するモータと、前記モータの回転軸に設けられたモータ側ギアと、当該モータ側ギアと
噛合うと共に前記駆動対象物の回転軸に設けられた駆動対象側ギアと、前記エンコーダセ
ンサの出力信号を基に前記モータをフィードバック制御する制御部とを備える回転駆動装
置であって、前記モータ側ギアと前記駆動対象側ギアとのギア比が整数となるように両ギ
アの歯数が設定されていると共に、前記駆動対象物の1回転当たり前記エンコーダセンサ
から出力されるパルス数が前記駆動対象側ギアの歯数の整数倍となるように前記エンコー
ダ板が設定されていることを特徴とする。
【0008】
また、回転駆動装置に係る第2の解決手段として、上記第1の解決手段において、前記駆動対象物の1回転につき前記エンコーダセンサから出力されるパルス数が前記駆動対象側ギアの歯数の整数倍且つ偶数となるように前記エンコーダ板が設定されていることを特徴とする。
【0009】
また、本発明は、画像形成装置に係る第1の解決手段として、駆動対象物の回転軸に設けられたエンコーダ板及び当該エンコーダ板の回転速度に応じたパルス信号を出力するエンコーダセンサを有するエンコーダと、前記駆動対象物を回転駆動するモータと、前記モータの回転軸に設けられたモータ側ギアと、当該モータ側ギアと噛合うと共に前記駆動対象物の回転軸に設けられた駆動対象側ギアと、前記エンコーダセンサの出力信号を基に前記モータをフィードバック制御すると共に電子写真方式による画像形成動作を統合制御する制御部とを備える画像形成装置であって、前記モータ側ギアと前記駆動対象側ギアとのギア比が整数となるように両ギアの歯数が設定されていると共に、前記駆動対象物の1回転当たり前記エンコーダセンサから出力されるパルス数が前記駆動対象側ギアの歯数の整数倍となるように前記エンコーダ板が設定されていることを特徴とする。
【0010】
また、画像形成装置に係る第2の解決手段として、上記第1の解決手段において、前記駆動対象物の1回転につき前記エンコーダセンサから出力されるパルス数が前記駆動対象側ギアの歯数の整数倍且つ偶数となるように前記エンコーダ板が設定されていることを特徴とする。
【0011】
また、画像形成装置に係る第3の解決手段として、上記第1または第2の解決手段において、前記駆動対象物は感光体ドラムであることを特徴とする。
【発明の効果】
【0012】
本発明によれば、前記モータ側ギアと前記駆動対象側ギアとのギア比が整数となるように両ギアの歯数が設定されていると共に、前記駆動対象物の1回転当たり前記エンコーダセンサから出力されるパルス数が前記駆動対象側ギアの歯数の整数倍となるように設定されているため、エンコーダセンサによって検出した回転速度に含まれる誤差成分を除去するためのデジタル演算処理に要する演算負荷及びメモリ資源の低減を図ることが可能となる。
【発明を実施するための最良の形態】
【0013】
以下、図面を参照して、本発明の一実施形態について説明する。
図1は、本実施形態に係る画像形成装置100の概略構成図である。本実施形態に係る画像形成装置100は、例えば電子写真方式を用いたフルカラープリンタであり、感光体ドラム1、帯電部2、露光部3、現像部4、転写部5、クリーニングブレード6、摺擦ローラ7、給紙ローラ8、用紙搬送ローラ9、定着ユニット10、用紙搬送ローラ11及び排紙ローラ12から概略構成されている。
【0014】
感光体ドラム1は、その表面に静電潜像を形成するための回転感光体である。詳細は後述するが、この感光体ドラム1は、その回転軸がDCブラシレスモータの回転軸とギアを介して連結されており、DCブラシレスモータによって回転駆動されるものである。帯電部2は、感光体ドラム1の上方に設置されており、感光体ドラム1の表面を一様に帯電させるものである。露光部3はレーザ照射ユニットから構成されており、帯電部2によって帯電された感光体ドラム1の表面にレーザ光を照射することにより、静電潜像を形成するものである。
【0015】
現像部4は、静電潜像が形成された感光体ドラム1の表面に各色のトナーを供給してトナー像を形成するものである。具体的には、この現像部4は、ロータリラック4aと、このロータリラック4aの円周方向に90度間隔で配設された、イエロー用トナーを供給する現像器4Y、マゼンタ用トナーを供給する現像器4M、シアン用トナーを供給する現像器4C、ブラック用トナーを供給する現像器4Kとから構成されている。ロータリラック4aは、回転軸4bを中心に回転しながら各色の現像器4Y、4M、4C、4Kを感光体ドラム1に対向する現像位置に順次移動させて現像(トナー供給)を行わせるものである。
【0016】
転写部5は、感光体ドラム1のトナー像を用紙Pに転写するものであり、中間転写ベルト5a、一次転写ローラ5b及び5c、駆動ローラ5d、二次転写対向ローラ5e、二次転写ローラ5fから構成されている。中間転写ベルト5aは、一次転写ローラ5b及び5c、駆動ローラ5d、二次転写対向ローラ5eにエンドレス状に巻きかけられ、駆動ローラ5dによって駆動されており、感光体ドラム1に形成されたトナー像が転写され一時的に保持される転写体の役割を担っている。二次転写ローラ5fは、中間転写ベルト5aの外周面において二次転写対向ローラ5eに対向する位置に配置され、中間転写ベルト5aに一次転写されたトナー像を用紙Pに二次転写する役割を担っている。
【0017】
クリーニングブレード6は、感光体ドラム1の表面に残留した残留現像剤などの付着物をクリーニングするものであり、例えばウレタンゴムを感光体ドラム1に圧接している。摺擦ローラ7は、感光体ドラム1の表面に当接して、トナーを回収したり吐き出したりするバッファの機能を有している。この摺擦ローラ7は、金属シャフトの周りを発泡ゴムで覆った構成となっており、バネ(図示略)により感光体ドラム1に付勢されている。
【0018】
給紙ローラ8は、用紙カセットに積載された用紙Pを1枚ずつ給紙するためのローラである。この給紙ローラ8によって給紙された用紙Pは、用紙搬送ローラ9によって二次転写対向ローラ5eと二次転写ローラ5fとの間に搬送されてトナー像が転写された後、定着ユニット10に搬送される。定着ユニット10は、回転自在に配設された定着体たる加熱ローラ10aと、加熱ローラ10aに圧接しながら回転する加圧体たる加圧ローラ10bとから構成されている。この定着ユニット10に搬送された用紙Pは、加熱ローラ10aと加圧ローラ10bとの間を通過する際に表裏両面から一定の温度、圧力で加熱及び加圧される。これにより、用紙P上のトナー像は溶融して定着し、用紙Pにフルカラー画像が形成される。定着処理後の用紙Pは、用紙搬送ローラ11によって排紙ローラ12に搬送され、排紙ローラ12によって外部に設置された排紙トレイに排紙される。
【0019】
図2は、上述した画像形成装置100の機能ブロック構成図である。なお、この図2において、図1と同じ構成要素には同一符号を付し、説明を省略する。図2において、符号20はCPU(Central Processing Unit:制御部)、符号21はROM(Read Only Memory)、符号22はRAM(Random Access Memory)、符号23はフラッシュメモリ、符号24は操作表示部、符号25は通信I/F、符号26はモータドライバ、符号27はDCブラシレスモータ、符号28はギア部、符号29はエンコーダ、符号30は基準位置センサである。また、符号200は、外部から画像形成装置100へ印刷指示するためのPC(Personal Computer)である。
【0020】
CPU20は、ROM21に記憶されている制御プログラムを実行し、フラッシュメモリ23に記憶されている画像データ、操作表示部24から入力される操作信号、エンコーダ29(詳細にはエンコーダセンサ29b)から入力されるパルス信号、基準位置センサ30から入力される基準位置信号、通信I/F25を介してPC200から受信した印刷指示信号及び印刷用画像データ(つまり印刷ジョブ)に基づいて、画像形成装置100内部の各機能部(感光体ドラム1、帯電部2、露光部3、現像部4、転写部5、給紙ローラ8、用紙搬送ローラ9、定着ユニット10、用紙搬送ローラ11及び排紙ローラ12を含む)を統合制御するものである。
【0021】
このCPU20は、感光体ドラム1の回転駆動制御として、エンコーダ29(詳細にはエンコーダセンサ29b)から割込み入力されるパルス信号をソフトウェアカウンタによってカウントすることにより、感光体ドラム1の回転速度を検出し、当該検出した回転速度が予め設定されている目標回転速度と一致するように(言い換えれば目標回転速度と回転速度との速度偏差量が零となるように)PID演算を行い、当該PID演算によって得られる操作量に応じたPWM(Pulse Width Modulation)信号をモータドライバ26に出力する機能(つまりDCブラシレスモータ27をPID制御する機能)を有している。
【0022】
ROM21は、CPU20で使用される制御プログラムやその他の設定データ(例えばPID制御で用いられる目標回転速度や比例ゲイン定数Kp、積分ゲイン定数Ki、微分ゲイン定数Kdなど)を記憶する不揮発性メモリである。RAM22は、CPU20が制御プログラムを実行して各種動作を行う際に、データの一時保存先に用いられる揮発性のワーキングメモリである。フラッシュメモリ23は、PC200から送信される画像データを記憶するために用いられる書き換え可能な不揮発性メモリである。
【0023】
操作表示部24は、例えばタッチパネルによって構成されており、CPU20の制御の下、各種操作キーや各種情報を報知する画面を表示すると共に、タッチパネル上に表示される各種操作キーの操作入力情報を操作信号としてCPU20に出力する。通信I/F25は、画像形成装置100(詳しくはCPU20)と外部のPC200との間で通信を行うためのインタフェースであり、LAN(Local Area Network)等のネットワークによってPC200と接続されている。
【0024】
モータドライバ26は、CPU20から入力されるPWM信号に応じて、DCブラシレスモータ27に印加する直流駆動電圧をオン/オフする半導体スイッチング素子を備えており、PWM信号と同一のデューティ比を有する直流駆動電圧をDCブラシレスモータ27に供給する。DCブラシレスモータ27は、モータドライバ26から供給される直流駆動電圧によって回転動作するモータであり、その回転軸はギア部28を介して感光体ドラム1の回転軸と連結されている。
【0025】
ギア部28は、DCブラスレスモータ27の回転軸に設けられたピニオン28a(モータ側ギア)と、当該ピニオン28aと噛合うと共に感光体ドラム1の回転軸に設けられたギア28b(駆動対象側ギア)とから構成されている。
【0026】
エンコーダ29は、感光体ドラム1の回転軸に設けられ、感光体ドラム1と同期回転するエンコーダ板29aと、エンコーダ板29aを挟み込むように配置されたエンコーダセンサ(例えば光センサ)29bとから構成されており、エンコーダセンサ29bはエンコーダ板29aの周方向に沿って複数形成されているスリットが光を通過した際に矩形波状のパルス信号を出力する。つまり、エンコーダセンサ29bは、感光体ドラム1の回転速度に応じたパルス信号をCPU20に出力する。
【0027】
基準位置センサ30は、例えば光センサであり、感光体ドラム1の円周方向の1箇所に設けられた基準マークが光を通過した際に矩形波状のパルス信号(基準位置信号)をCPU20に出力する。つまり、この基準位置センサ30は、感光体ドラム1が1回転する毎に1パルスの基準位置信号を出力する。CPU20は、この基準位置信号を基に感光体ドラム1が1回転した期間を把握することができる。
【0028】
なお、上記の構成要素の内、少なくともCPU20、ROM21、RAM22、フラッシュメモリ23、モータドライバ26、DCブラシレスモータ27、ギア部28、エンコーダ29、基準位置センサ30及び感光体ドラム1は、回転駆動装置を構成するものである。
【0029】
図3は、CPU20におけるPID制御に関するデジタル演算処理を表す機能ブロック
図である。この図3において、回転速度検出部20aは、エンコーダセンサ29bから割
込み入力されるパルス信号をソフトウェアカウンタによってカウントすることにより、感
光体ドラム1の回転速度Vc1を検出する。
【0030】
第1のコムフィルタ20bは、回転速度検出部20aによって検出された回転速度V
c1に含まれる、感光体ドラム1の回転軸に対するエンコーダ板29aの取り付け誤差(
偏芯)に起因して生じる偏芯成分(感光体ドラム1の回転軸の1回転当たり1周期の正弦
波状の誤差成分)を除去する。なお、以下では、エンコーダ板29aの偏芯成分除去後の
回転速度をVc2とする。第2のコムフィルタ20cは、回転速度Vc2に含まれる、感
光体ドラム1の回転軸とDCブラシレスモータの回転軸とを連結するギア部28の噛合い
による振動に起因するギア1歯成分(ギア28bの1歯周期当たり1周期の正弦波状の誤
差成分)を除去する。なお、以下では、ギア一歯成分除去後の回転速度をVc3とする。
【0031】
図4に、上記の第1のコムフィルタ20b及び第2のコムフィルタ20cの詳細な機能ブロックを示す。この図4に示すように、第1のコムフィルタ20bにおいて、加算処理部20b1は、回転速度検出部20aによって検出された回転速度Vc1と乗算処理部20b4の演算値との加算処理を行う。なお、この加算処理部20b1の加算値が回転速度Vc2となる。減算処理部20b2は、加算処理部20b1の加算値(回転速度Vc2)から遅延処理部20b3の出力値を減算し、その減算値を遅延処理部20b3の入力値とする。
【0032】
遅延処理部20b3は、FIFO(First-In First-Out)により、減算処理部20b2
の減算値を順次格納すると共に最初に格納した減算値から順次出力する。この遅延処理部
20b3にて減算値を順次格納するために使用されるメモリ段数は、コムフィルタの特性
パラメータである入力信号(ここでは回転速度Vc1)の遅延量に応じて設定されている。
つまり、このメモリ段数(遅延量)は、回転速度Vc1に含まれるエンコーダ板29aの
偏芯成分を除去可能な値に設定されている。乗算処理部20b4は、遅延処理部20b3
の出力値にデータ正規化用の1/2を乗算するものである。
【0033】
一方、図4に示すように、第2のコムフィルタ20cも第1のコムフィルタ20bと同
様な機能ブロックである、加算処理部20c1、減算処理部20c2、遅延処理部20c
3及び乗算処理部20c4から構成されている。ここで、第2のコムフィルタ20cが第
1のコムフィルタ20bと異なる点は、加算処理部20c1が第1のコムフィルタ20b
の出力値である回転速度Vc2を入力とし、加算処理の結果である回転速度Vc3を出力
値とする点と、遅延処理部20c3にて減算処理部20c2の減算値を順次格納するため
に使用されるメモリ段数(遅延量)は、回転速度Vc2に含まれる、ギア1歯成分を除去
可能な値に設定されている点である。
【0034】
以下、図3に戻って説明を続ける。
速度偏差算出部20dは、感光体ドラム1の目標回転速度Vtと回転速度Vc3との差(速度偏差量)ΔVを算出する。積分処理部20eは、速度偏差算出部20dにて算出される速度偏差量ΔVの積分処理を行う。積分ゲイン乗算部20fは、積分処理部20eによる積分処理結果に積分ゲイン定数Kiを乗算する。比例ゲイン乗算部20gは、速度偏差算出部20dにて算出される速度偏差量ΔVに比例ゲイン定数Kpを乗算する。微分処理部20hは、速度偏差算出部20dにて算出される速度偏差量ΔVの微分処理を行う。微分ゲイン乗算部20iは、微分処理部20hによる微分処理結果に微分ゲイン定数Kdを乗算する。加算処理部20jは、積分ゲイン乗算部20f、比例ゲイン乗算部20g及び微分ゲイン乗算部20iのそれぞれの演算値を加算し、その加算値をDCブラシレスモータ27に対する操作量Cont1とする。
【0035】
補正用メモリ20kは、DCブラシレスモータ27の軸芯ズレに起因して生じる偏芯成分(エンコーダセンサ28bによって検出した回転速度Vc1に含まれる、ピニオン28aの1回転当たり1周期の正弦波状の誤差成分)を補正するための補正値を予め記憶しているメモリである。なお、この補正値はピニオン28aの回転位置と対応付けられて複数設定されており、補正用メモリ20mではピニオン28aの回転位置に対応するアドレスにその回転位置に応じた補正値が格納されている。また、この補正用メモリ20kは、時間管理部20mから入力されるリードアドレスRDに対応するメモリ領域に格納されている補正値をフィードフォワード部20nに出力する。
【0036】
時間管理部20mは、基準位置センサ30から割込み入力される基準位置信号の入力時点(つまり感光体ドラム1の1回転期間の開始時点)を基準として経過時間を監視し、ある経過時間に対応するピニオン28aの回転位置に応じたアドレスをリードアドレスRDとして補正用メモリ20kに出力する。フィードフォワード部20nは、加算処理部20jの演算結果である操作量Cont1に補正用メモリ20kから出力される補正値を加算し、その加算結果を最終的な操作量Cont2とする。PWM信号生成部20pは、フィードフォワード部20nから得られる操作量Cont2に応じたPWM信号を生成して、モータドライバ26に出力する。
以上が、CPU20におけるPID制御に関するデジタル演算処理を表す機能ブロックの説明である。
【0037】
ところで、上記のように構成された本実施形態に係る画像形成装置100では、ピニオン28aとギア28bとのギア比が整数となるように両ギアの歯数が設定されていると共に、感光体ドラム1の1回転当たりエンコーダセンサ29bから出力されるパルス数がギア28bの歯数の整数倍且つ偶数となるように、エンコーダ板29aのスリット数が設定されていることを特徴としている。
【0038】
具体的には、ピニオン28aの歯数をn1、ギア28bの歯数をn2、ピニオン28a
とギア28bとのギア比をN1、エンコーダ板29aのスリット数(感光体ドラム1の1
回転当たりエンコーダセンサ29bから出力されるパルス数)をn3とすると、下記関係
式(1)及び(2)が成立する。
n2=N1・n1 (N1は整数) ・・・・・(1)
n3=N2・n2 (N2は整数、n3は偶数) ・・・・・(2)
このように設定した場合、ギア28bの1回転(つまり感光体ドラム1の1回転)当た
りエンコーダセンサ29bから出力されるパルス数はn3となり、ギア28bの1歯周期
当たりエンコーダセンサ29bから出力されるパルス数はn3/(N2・N1)となり、
ピニオン28aの1回転(つまりDCブラスレスモータ27の1回転)当たりエンコーダ
センサ29bから出力されるパルス数はn3/N1となる。
【0039】
上記関係式(1)及び(2)が成立するように、ピニオン28a及びギア28bの歯数
(n1、n2)、及びエンコーダ板29aのスリット数n3を設定することにより、上述
した補正用メモリ20mのメモリ段数を低減することができ、その結果、CPU20の演
算負荷を低減することが可能となる。また、第1のコムフィルタ20b及び第2のコムフ
ィルタ20cの設計が容易となる。
【0040】
以下、このような効果が得られる理由について、画像形成装置100(特にCPU2
0)の動作と共に説明する。
図5は、CPU20の動作を表すフローチャートである。この図5に示すように、CPU20は、PC200から印刷指示信号及び印刷用画像データを受信して、印刷ジョブの発生を検知すると(ステップS10)、ROM21からPID制御で用いられる設定データ(感光体ドラム1の目標回転速度Vt、比例ゲイン定数Kp、積分ゲイン定数Ki、微分ゲイン定数Kd)を読み出す(ステップS11)。
【0041】
そして、CPU20(回転速度検出部20a)は、エンコーダセンサ29bから割込み入力されるパルス信号をソフトウェアカウンタによってカウントすることにより、感光体ドラム1の回転速度Vc1を検出する(ステップS12)。この回転速度Vc1は、エンコーダセンサ29bから入力される1パルス毎に、その1パルスに対応する今回値として得られるものである。また、この回転速度Vc1の検出処理と並列的に、CPU20(時間管理部20m)は、基準位置センサ30から割込み入力される基準位置信号の入力時点(つまり感光体ドラム1の1回転期間の開始時点)を基準として経過時間の監視を開始する。
【0042】
図6は、感光体ドラム1の1回転期間において、エンコーダセンサ29bの出力信号
から得られる回転速度Vc1の検出結果と基準位置信号とエンコーダセンサ29bから出力されるパルス数n3との対応関係を表したものである。この図6に示すように、回転速度Vc1には、感光体ドラム1の回転軸に対するエンコーダ板29aの取り付け誤差(偏芯)に起因して生じる偏芯成分(感光体ドラム1の回転軸の1回転当たり1周期の正弦波状の誤差成分)が含まれている。
【0043】
続いて、CPU20(第1のコムフィルタ20b)は、図6に示すような回転速度Vc1に含まれるエンコーダ板29aの偏芯成分を除去する(ステップS13)。図6に示すような周期を有するエンコーダ板29aの偏芯成分を第1のコムフィルタ20bで除去するためには、コムフィルタの特性パラメータである入力信号(ここでは回転速度Vc1)の遅延量を、エンコーダ板29aの偏芯成分の1/2周期(言い換えれば感光体ドラム1の1回転周期の1/2周期)に設定すれば良い。つまり、第1のコムフィルタ20bにおける遅延処理部20b3のメモリ段数をn3/2個に設定すれば良い。ここで、上述したように、エンコーダセンサ29bから出力されるパルス数(エンコーダ板29aのスリット数)n3が偶数となるように設定しているため、第1のコムフィルタ20bの設計を容易にすることができる。
【0044】
続いて、CPU20(第2のコムフィルタ20c)は、エンコーダ板29aの偏芯成分除去後の回転速度Vc2に含まれるギア28bの1歯成分を除去する(ステップS14)。
図7は、感光体ドラム1の1回転期間において、回転速度Vc2と基準位置信号とエンコーダセンサ29bから出力されるパルス数n3との対応関係を表したものである。図7に示すように、回転速度Vc2には、感光体ドラム1の回転軸とDCブラシレスモータの回転軸とを連結するギア部28の噛合いによる振動に起因するギア1歯成分(ギア28bの1歯周期当たり1周期の正弦波状の誤差成分)が含まれている。
【0045】
上述したように、本実施形態に係る画像形成装置100では、上記関係式(1)及び(2)が成立するように設定しているため、ギア28bの1歯周期当たりエンコーダセンサ29bから出力されるパルス数はn3/(N2・N1)となる。言い換えれば、回転速度Vc2に含まれるギア28bの1歯成分の1周期は、n3/(N2・N1)に相当することになる。従って、図7に示すような周期を有するギア28bの1歯成分を第2のコムフィルタ20cで除去するためには、コムフィルタの特性パラメータである入力信号(ここでは回転速度Vc2)の遅延量を、ギア28bの1歯成分の1/2周期に設定すれば良い。つまり、第2のコムフィルタ20cにおける遅延処理部20c3のメモリ段数をn3/(2・N2・N1)個に設定すれば良い。ここで、上述したように、エンコーダセンサ29bから出力されるパルス数(エンコーダ板29aのスリット数)n3が偶数となるように設定しているため、第2のコムフィルタ20cの設計を容易にすることができる。
【0046】
続いて、CPU20(速度偏差算出部20d)は、ギア28bの1歯成分除去後の回転速度Vc3と目標回転速度Vtとの速度偏差量ΔVを算出する(ステップS15)。そして、CPU20(積分処理部20e、積分ゲイン乗算部20f、比例ゲイン乗算部20g、微分処理部20h、微分ゲイン乗算部20i及び加算処理部20j)は、速度偏差量ΔVが零となるように、比例ゲイン定数Kp、積分ゲイン定数Ki、微分ゲイン定数Kdを用いてPID演算を行って操作量Cont1を算出する(ステップS16)。
【0047】
続いて、CPU20(フィードフォワード部20n)は、操作量Cont1に補正用メモリ20kから出力される補正値を加算することにより、DCブラシレスモータ27の軸芯ズレに起因して生じる偏芯成分を除去(補正)する(ステップS17)。ここで、CPU20(時間管理部20m)は、基準位置信号を基に感光体ドラム1の1回転周期の開始時点からの経過時間を監視しており、ある経過時間に対応するピニオン28aの回転位置に応じたリードアドレスRDを補正用メモリ20kに出力し、補正用メモリ20kは、リードアドレスRDに対応するメモリ領域に格納されている補正値をフィードフォワード部20nに出力するという処理を並列的に行っている。
【0048】
図8は、感光体ドラム1の1回転期間において、回転速度Vc3と基準位置信号とエンコーダセンサ29bから出力されるパルス数n3との対応関係を表したものである。図8に示すように、回転速度Vc3には、DCブラシレスモータ27の軸芯ズレに起因して生じる偏芯成分(ピニオン28aの1回転当たり1周期の正弦波状の誤差成分)が含まれている。操作量Cont1は、この回転速度Vc3を基に演算されたものであるため、当然このDCブラシレスモータ27の偏芯成分を含んでいる。
【0049】
上述したように、本実施形態に係る画像形成装置100では、上記関係式(1)及び(2)が成立するように設定しているため、ピニオン28aの1回転周期当たりエンコーダセンサ29bから出力されるパルス数はn3/N1となる。言い換えれば、回転速度Vc3に含まれるDCブラシレスモータ27の偏芯成分の1周期は、n3/N1に相当することになる。従って、図8に示すような周期を有するDCブラシレスモータ27の偏芯成分を補正するための補正値はn3/N1個あれば足り(つまり補正用メモリ20kのメモリ段数もn3/N1個あれば良い)、このn3/N1個の補正値を感光体ドラム1の1回転につきN1回繰り返し使用することにより、感光体ドラム1の1回転周期内に含まれるDCブラシレスモータ27の偏芯成分を除去することができる。
【0050】
続いて、CPU20(PWM信号生成部20p)は、上記補正処理後の操作量Cont2に応じたPWM信号を生成してモータドライバ26に出力することにより、DCブラシレスモータ27のPID制御を行う(ステップS18)。そして、CPU20は、印刷ジョブが終了したか否かを判定し(ステップS19)、印刷ジョブが終了していない場合(「No」)、ステップS12の処理に戻る。CPU20は、印刷ジョブが終了するまでの期間(つまりステップS19で印刷ジョブの終了判定が発生するまでの期間)は、ステップS12〜S19の処理をループすることにより、感光体ドラム1の回転速度Vc1の検出結果に含まれる各種の誤差成分を除去及び補正しつつ、PID制御を継続する。
【0051】
また、図5には図示していないが、CPU20は、感光体ドラム1が目標回転速度Vtに安定すると、給紙ローラ8及び用紙搬送ローラ9を制御することにより、用紙カセットから用紙Pを二次転写対向ローラ5eと二次転写ローラ5fとの間に搬送すると共に、帯電部2、露光部3、現像部4、転写部5を制御することにより、感光体ドラム1に形成したトナー像を用紙Pに転写し、さらに定着ユニット10を制御して用紙P上のトナーを定着させた後、用紙搬送ローラ11及び排紙ローラ12を制御して、フルカラー画像が形成(印刷)された用紙Pを排紙トレイに排紙する、という画像形成処理を並列的に行っている。
【0052】
このような画像形成処理により印刷ジョブが終了し、ステップS19において、印刷ジョブが終了したと判定された場合(「Yes」)、CPU20は、DCブラシレスモータ27のPID制御を停止して感光体ドラム1の回転駆動制御を終了する(ステップS20)。
【0053】
以上のように、本実施形態に係る画像形成装置100によれば、エンコーダセンサ29bの出力パルス信号を基に検出した回転速度Vc1に含まれる誤差成分を施すデジタル演算処理に要するメモリ資源(特に補正用メモリ20k)の低減及び演算負荷の低減を図ることが可能である。また、フィルタリング処理で使用する第1のコムフィルタ20b及び第2のコムフィルタ20cの設計を容易にすることができる。
【0054】
なお、本発明は上記実施形態に限定されず、以下のような変形例が考えられる。
(1)上記実施形態では、感光体ドラム1の1回転当たりエンコーダセンサ29bから出力されるパルス数がギア28bの歯数n3の整数倍且つ偶数となるように、エンコーダ板29aのスリット数n3を設定したが、例えばエンコーダ板29aの偏芯成分、ギア28bの1歯成分のフィルタリング処理にコムフィルタを使用しない場合は、感光体ドラム1の1回転当たりエンコーダセンサ29bから出力されるパルス数がギア28bの歯数n3の整数倍となるように、エンコーダ板29aのスリット数n3を設定しても良い。このように設定することにより、少なくともDCブラシレスモータ27の偏芯成分を補正するための補正値を格納する補正用メモリ20kのメモリ段数を低減できるとい効果は得られる。
【0055】
(2)上記実施形態では、駆動対象物として感光体ドラム1を例示して説明したが、他の駆動対象物であってエンコーダによって回転速度を検出するものであれば本発明を適用することができる。また、上記実施形態では、画像形成装置100としてプリンタを例示して説明したが、この他、コピー機、プリンタ及びFAX等の機能を有する複合機や、コピー機、FAX等の単体のOA機器などにも本発明を適用することができる。
【図面の簡単な説明】
【0056】
【図1】本発明の一実施形態に係る画像形成装置100の構成概略図である。
【図2】本発明の一実施形態に係る画像形成装置100の機能ブロック図である。
【図3】本発明の一実施形態に係る画像形成装置100におけるCPU20の詳細な機能ブロック図である。
【図4】本発明の一実施形態に係る画像形成装置100におけるCPU20の第1のコムフィルタ20b及び第2のコムフィルタ20cの詳細な機能ブロック図である。
【図5】本発明の一実施形態に係る画像形成装置100(CPU20)の動作に関するフローチャートである。
【図6】本発明の一実施形態に係る画像形成装置100の動作に関する第1説明図である。
【図7】本発明の一実施形態に係る画像形成装置100の動作に関する第2説明図である。
【図8】本発明の一実施形態に係る画像形成装置100の動作に関する第3説明図である。
【符号の説明】
【0057】
100…画像形成装置、1…感光体ドラム、2…帯電部、3…露光部、4…現像部、5…転写部、6…クリーニングブレード、7…摺擦ローラ、8…給紙ローラ、9…用紙搬送ローラ、10…定着ユニット、11…用紙搬送ローラ、12…排紙ローラ、20…CPU(Central Processing Unit)、21…ROM(Read Only Memory)、22…RAM(Random Access Memory)、23…フラッシュメモリ、24…操作表示部、25…通信I/F、26…モータドライバ、27…DCブラシレスモータ、28…ギア部、29…エンコーダ、30…基準位置センサ、200…PC(Personal Computer)
【特許請求の範囲】
【請求項1】
駆動対象物の回転軸に設けられたエンコーダ板及び当該エンコーダ板の回転速度に応じ
たパルス信号を出力するエンコーダセンサを有するエンコーダと、前記駆動対象物を回転
駆動するモータと、前記モータの回転軸に設けられたモータ側ギアと、当該モータ側ギア
と噛合うと共に前記駆動対象物の回転軸に設けられた駆動対象側ギアと、前記エンコーダ
センサの出力信号を基に前記モータをフィードバック制御する制御部とを備える回転駆動
装置であって、
前記モータ側ギアと前記駆動対象側ギアとのギア比が整数となるように両ギアの歯数が
設定されていると共に、前記駆動対象物の1回転当たり前記エンコーダセンサから出力さ
れるパルス数が前記駆動対象側ギアの歯数の整数倍となるように前記エンコーダ板が設定
されていることを特徴とする回転駆動装置。
【請求項2】
前記駆動対象物の1回転につき前記エンコーダセンサから出力されるパルス数が前記駆
動対象側ギアの歯数の整数倍且つ偶数となるように前記エンコーダ板が設定されているこ
とを特徴とする請求項1記載の回転駆動装置。
【請求項3】
駆動対象物の回転軸に設けられたエンコーダ板及び当該エンコーダ板の回転速度に応じ
たパルス信号を出力するエンコーダセンサを有するエンコーダと、前記駆動対象物を回転
駆動するモータと、前記モータの回転軸に設けられたモータ側ギアと、当該モータ側ギア
と噛合うと共に前記駆動対象物の回転軸に設けられた駆動対象側ギアと、前記エンコーダ
センサの出力信号を基に前記モータをフィードバック制御すると共に電子写真方式による
画像形成動作を統合制御する制御部とを備える画像形成装置であって、
前記モータ側ギアと前記駆動対象側ギアとのギア比が整数となるように両ギアの歯数が
設定されていると共に、前記駆動対象物の1回転当たり前記エンコーダセンサから出力さ
れるパルス数が前記駆動対象側ギアの歯数の整数倍となるように前記エンコーダ板が設定
されていることを特徴とする画像形成装置。
【請求項4】
前記駆動対象物の1回転につき前記エンコーダセンサから出力されるパルス数が前記駆
動対象側ギアの歯数の整数倍且つ偶数となるように前記エンコーダ板が設定されているこ
とを特徴とする請求項3記載の画像形成装置。
【請求項5】
前記駆動対象物は感光体ドラムであること特徴とする請求項3または4に記載の画像形成装置。
【請求項1】
駆動対象物の回転軸に設けられたエンコーダ板及び当該エンコーダ板の回転速度に応じ
たパルス信号を出力するエンコーダセンサを有するエンコーダと、前記駆動対象物を回転
駆動するモータと、前記モータの回転軸に設けられたモータ側ギアと、当該モータ側ギア
と噛合うと共に前記駆動対象物の回転軸に設けられた駆動対象側ギアと、前記エンコーダ
センサの出力信号を基に前記モータをフィードバック制御する制御部とを備える回転駆動
装置であって、
前記モータ側ギアと前記駆動対象側ギアとのギア比が整数となるように両ギアの歯数が
設定されていると共に、前記駆動対象物の1回転当たり前記エンコーダセンサから出力さ
れるパルス数が前記駆動対象側ギアの歯数の整数倍となるように前記エンコーダ板が設定
されていることを特徴とする回転駆動装置。
【請求項2】
前記駆動対象物の1回転につき前記エンコーダセンサから出力されるパルス数が前記駆
動対象側ギアの歯数の整数倍且つ偶数となるように前記エンコーダ板が設定されているこ
とを特徴とする請求項1記載の回転駆動装置。
【請求項3】
駆動対象物の回転軸に設けられたエンコーダ板及び当該エンコーダ板の回転速度に応じ
たパルス信号を出力するエンコーダセンサを有するエンコーダと、前記駆動対象物を回転
駆動するモータと、前記モータの回転軸に設けられたモータ側ギアと、当該モータ側ギア
と噛合うと共に前記駆動対象物の回転軸に設けられた駆動対象側ギアと、前記エンコーダ
センサの出力信号を基に前記モータをフィードバック制御すると共に電子写真方式による
画像形成動作を統合制御する制御部とを備える画像形成装置であって、
前記モータ側ギアと前記駆動対象側ギアとのギア比が整数となるように両ギアの歯数が
設定されていると共に、前記駆動対象物の1回転当たり前記エンコーダセンサから出力さ
れるパルス数が前記駆動対象側ギアの歯数の整数倍となるように前記エンコーダ板が設定
されていることを特徴とする画像形成装置。
【請求項4】
前記駆動対象物の1回転につき前記エンコーダセンサから出力されるパルス数が前記駆
動対象側ギアの歯数の整数倍且つ偶数となるように前記エンコーダ板が設定されているこ
とを特徴とする請求項3記載の画像形成装置。
【請求項5】
前記駆動対象物は感光体ドラムであること特徴とする請求項3または4に記載の画像形成装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−236975(P2009−236975A)
【公開日】平成21年10月15日(2009.10.15)
【国際特許分類】
【出願番号】特願2008−79403(P2008−79403)
【出願日】平成20年3月26日(2008.3.26)
【出願人】(000006150)京セラミタ株式会社 (13,173)
【Fターム(参考)】
【公開日】平成21年10月15日(2009.10.15)
【国際特許分類】
【出願日】平成20年3月26日(2008.3.26)
【出願人】(000006150)京セラミタ株式会社 (13,173)
【Fターム(参考)】
[ Back to top ]