
回転2軸運動の同期精度の診断方法
【課題】回転2軸運動の同期精度を低コストで簡単に診断できる方法を提供する。
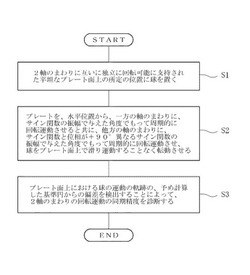
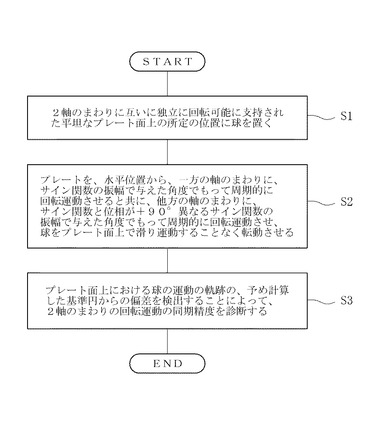
【解決手段】2軸のまわりに互いに独立に回転可能に支持された平坦なプレート面上の所定の位置に球を置く(S1)。プレートを、水平位置から、2軸のうちの一方の軸のまわりに、サイン関数の振幅で与えた角度でもって周期的に回転運動させるとともに、2軸のうちの他方の軸のまわりに、前記サイン関数と位相が+90°異なるサイン関数の振幅で与えた角度でもって周期的に回転運動させることによって、球をプレート面上において滑り運動することなく転動させる(S2)。プレート面上における球の運動の軌跡の、予め計算した基準円からの偏差を検出することによって、2軸のまわりの回転運動の同期精度を診断する(S3)。
【解決手段】2軸のまわりに互いに独立に回転可能に支持された平坦なプレート面上の所定の位置に球を置く(S1)。プレートを、水平位置から、2軸のうちの一方の軸のまわりに、サイン関数の振幅で与えた角度でもって周期的に回転運動させるとともに、2軸のうちの他方の軸のまわりに、前記サイン関数と位相が+90°異なるサイン関数の振幅で与えた角度でもって周期的に回転運動させることによって、球をプレート面上において滑り運動することなく転動させる(S2)。プレート面上における球の運動の軌跡の、予め計算した基準円からの偏差を検出することによって、2軸のまわりの回転運動の同期精度を診断する(S3)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転2軸運動、すなわち、直交する2軸のまわりの回転運動の同期精度を診断する方法に関する。
【背景技術】
【0002】
従来、金型等の工業製品に使用される部品の加工には、直交する並進3軸を備えた3軸制御マシニングセンタが使用されており、3軸制御マシニングセンタの任意の2軸の同期制御の精度を診断するためには、DBB(Double Ball Bar)法が一般に用いられている。
【0003】
DBB法によれば、トランスデューサを内蔵し、伸縮するバーが3軸制御マシニングセンタの2軸に保持されるとともに、円運動指令が与えられる。そして、3軸制御マシニングセンタが動作する間のバーの伸縮変化量が測定されることで、円運動に生じる半径方向の距離変動、すなわち基準円からの偏差が検出され、それによって2軸の同期制御の精度が診断される。
【0004】
また、近年、部品のより複雑な加工に対応するため、並進3軸に回転2軸を加えた5軸制御マシニングセンタが普及しつつある(例えば、特許文献1参照)。
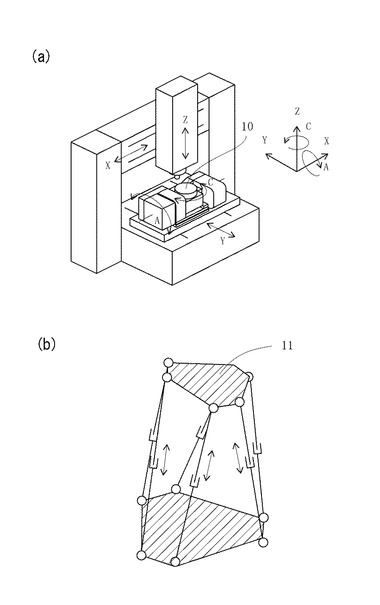
図10aは、5軸制御立形マシニングセンサの1例を示す斜視図である。図10aに示すように、5軸制御立形マシニングセンタは、3軸制御立形マシニングセンタのテーブル上に、回転軸であるA軸およびC軸をもつ傾斜円テーブル10を搭載したものである。そして、5軸制御立形マシニングセンタは、回転2軸を割り出して(固定して)並進3軸で加工する動作モード、回転1軸のみ割り出して並進3軸と回転1軸で加工する動作モード、および、回転2軸と並進3軸を同時に動作させて加工する動作モード等で動作し得る。
【0005】
しかしながら、DBB法によれば、5軸制御立形マシニングセンタの、回転2軸(A軸およびC軸)のうちのいずれか一方を含む3軸の同期運動の精度を診断することはできるが、回転2軸運動の同期精度を診断することができなかった(例えば、特許文献2参照)。
そして、回転2軸運動の同期精度を診断するには、高価な高精度ジャイロセンサーを用いる等の、非常にコストのかかる方法しかなかった。また、たとえDBB法を発展させることで回転2軸運動の同期精度の診断が可能になったとしても、DBB法の実施にも高価なセンサーが必要であり、コストがかかるという問題があった。
【0006】
また、この回転2軸運動の同期精度の診断は、5軸制御マシニングセンタだけでなく、図10bに示すようなパラレルメカニズムにおいても、そのエンドプレート11を運動させるような場合に、必要であった。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2008−73813号公報
【特許文献2】特開2004−219132号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
したがって、本発明の課題は、回転2軸運動の同期精度を低コストで簡単に診断できる方法を提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決するため、本発明は、直交する2軸のまわりの回転運動の同期精度を診断する方法であって、(1)前記2軸のまわりに互いに独立に回転可能に支持された平坦なプレート面上の所定の位置に球を置き、(2)前記プレートを、水平位置から、前記2軸のうちの一方の軸のまわりに、サイン関数の振幅で与えた角度でもって周期的に回転運動させるとともに、前記2軸のうちの他方の軸のまわりに、前記サイン関数と位相が+90°異なるサイン関数の振幅で与えた角度でもって周期的に回転運動させることによって、前記球を前記プレート面上において滑り運動することなく転動させ、(3)前記プレート面上における前記球の運動の軌跡の、予め計算した基準円からの偏差を検出することによって、前記2軸のまわりの回転運動の同期精度を診断することを特徴とする方法を構成したものである。
【0010】
上記構成において、前記プレート面上における前記球の運動の軌跡が楕円となり、前記楕円の長軸および短軸が前記2軸に整合するとき、前記2軸のまわりの回転運動の振幅に誤差が生じているものと判定し、前記振幅の誤差が前記楕円の長軸および短軸の長さの差と比例関係にあることに基づき、前記振幅の誤差を定量的に検出することができる。
【0011】
あるいは、前記プレート面上における前記球の運動の軌跡が楕円となり、かつ、前記楕円の長軸または短軸が前記2軸に整合しないとき、前記2軸のまわりの回転運動の振幅および位相差に誤差が生じているか、または前記2軸のまわりの回転運動の位相差のみに誤差が生じているものと判定し、前記位相差の誤差が、前記長軸または前記短軸が前記2軸のうちの近い方の軸となす角度と比例関係にあることに基づき、前記位相差の誤差を定量的に検出することもできる。
【0012】
上記構成において、前記球は、球状の芯体および前記芯体の外面を取り巻く外被とからなる2層構造を有していることが好ましく、より好ましくは、前記芯体は、金属等の高密度の材料から形成され、前記外被は、ゴム等の柔軟な材料から形成される。
さらに、前記外被がゴムからなっている場合には、前記プレートはアクリル板からなっていることが好ましい。
【発明の効果】
【0013】
本発明によれば、回転2軸のまわりに互いに独立に回転可能に支持された平坦なプレート面上に球を置き、該プレートを、該2軸のまわりに互いに位相が90°ずれたサイン関数の振幅で与えた角度で周期的に回転運動させ、プレート面上における球の運動の軌跡の基準円からの偏差を検出することで、回転2軸運動の同期精度を診断するようにしたので、従来のような高価なDBBや高精度ジャイロセンサーを使用することなく、極めて簡単にかつ低コストで診断が行える。
【図面の簡単な説明】
【0014】
【図1】本発明による方法のフロー図である。
【図2】水平位置にあるプレート面上の所定位置に球を置いた状態を示す斜視図である。
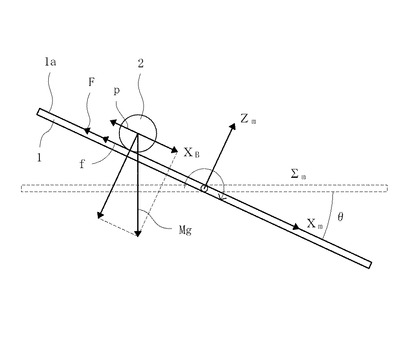
【図3】図2をy軸方向に見た側面図であり、プレートをx軸方向に角度θ傾斜させた状態を示す図である。
【図4】球を転がり振り子運動させる実験の一連のプロセスを示す写真である。
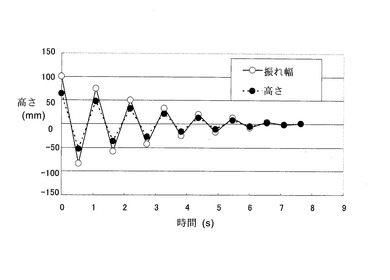
【図5】球を転がり振り子運動させたときの、振り子運動の端での球の高さおよび振れ幅の測定値をプロットしたグラフである。
【図6】球を傾斜したプレート面上で転がしたときの、傾斜角と、球が所定の距離転がるまでの時間の測定値をプロットしたグラフである。
【図7】プレート面上における球の運動の軌跡を例示する平面図である。
【図8】2軸回転運動の振幅に誤差が生じている場合の、振幅の誤差と、プレート上の球の楕円軌道の長軸および短軸の長さの差との関係を示すグラフである。
【図9】2軸回転運動の振幅および位相差の両方、または位相差のみに誤差が生じている場合の、位相差の誤差と、プレート上の球の楕円軌道の長軸がx軸となす角度との関係を示すグラフである。
【図10】(a)は、5軸制御立形マシニングセンタの1例を示す斜視図であり、(b)は、パラレルメカニズムの1例を示す斜視図である。
【発明を実施するための形態】
【0015】
以下、添付図面を参照して本発明の好ましい実施例について説明する。図1は、本発明による方法のフロー図である。図1を参照して、本発明によれば、まず、図2に示すように、回転運動の同期精度を診断すべき2軸3、4のまわりに互いに独立に回転可能に支持された平坦なプレート面1a上の所定の位置に球2を置く(図1のS1)。なお、図2中、2軸3、4にそれぞれx軸およびy軸を設定した。
【0016】
この場合、球2は、球状の芯体および芯体の外面を取り巻く外被とからなる2層構造を有していることが好ましく、より好ましくは、芯体は、金属等の高密度の材料から形成され、外被は、ゴム等の柔軟な材料から形成される。
さらに、外被がゴムからなっている場合には、プレート1はアクリル板からなっていることが好ましい。
なお、この実施例では、球2として、コンピュータのマウスに組み込まれるマウスボール(直径22mm、質量31g、ゴム製外被)を使用し、プレート1として、アクリル板を使用する。
【0017】
次いで、プレート1を、水平位置から、2軸のうちの一方の軸(例えばy軸)のまわりに、サイン関数の振幅で与えた角度θ=θ0sinωt(ここで、θ0は水平位置からの最大回転角であり、ωは角速度であり、tは時間である。)でもって周期的に回転運動させるとともに、2軸のうちの他方の軸(例えばx軸)のまわりに、前記サイン関数と位相が+90°異なるサイン関数の振幅で与えた角度θ’=θ0sin(ωt+90°)でもって周期的に回転運動させることによって、球2をプレート面1a上において滑り運動することなく転動させる(図1のS2)。
【0018】
こうして、球2は、プレート1のy軸のまわりの回転運動により、zx平面上で見たとき、プレート面1a上において単振動するとともに、プレート1のx軸のまわりの回転運動により、yz平面上で見たとき、プレート面1a上において、前記単振動よりも+90°位相がずれて単振動する。その結果、xy平面上で見たとき、球2はプレート面1a上で円軌道を描いて転動する。
【0019】
この場合、θ0およびωの値は、球2の円軌道が予め決定された基準円となるように決定する。このθ0およびωの値の決定方法は次のとおりである。
今、図2において、プレート1をx軸およびy軸のまわりに上記回転運動をさせる場合について考える。図3は、プレート1を、x軸のまわりには固定し、y軸のまわりに回転させ、x方向に角度θだけ傾斜させた状態を示した図である。
【0020】
図3において、プレート1に固定された座標系をΣm(XmYmZm座標系)とし、球2の重心位置に固定された座標系をΣB(XBYBZB座標系)とする。また、球2に作用する力は、摩擦力fと、遠心力pと、重力Mgであるとする。なお、図3中、Fは、摩擦力fと遠心力pの合力を表している。
【0021】
このとき、プレート面1a上を転がる球2の運動方程式は、球2は密度が一定の中実体としてゴム製外被の影響を無視し、さらに、θ(t)=θ0sinωt(図3の水平位置から時計回りに測定したθの値を正とする。)とし、また、球2の速度に比例した減衰項を加えて、次式のようになる。
【数1】

ここで、mXBは座標系Σmから見た座標系ΣBのX座標であり、Mは球2の質量であり、gは重力加速度であり、Dは減衰係数である。
【0022】
また、球2の重心のまわりの回転運動に対する運動方程式は、次のようになる。
【数2】
ここで、Iは球2の中心のまわりの慣性モーメントであり、rは球2の半径である。
【0023】
式(2)を、
【数3】
と変形し、式(1)と式(3)から、
【数4】
を得る。
【0024】
また、球2は滑ることなく転動することから、次式が成立する。
【数5】
ここで、rは球2の半径であり、φは球2の回転角である。
そして、式(5)を時間tで微分することによって、
【数6】
を得る。
【0025】
式(6)、並びに、密度が一様な球体の慣性モーメントI=(2/5)Mr2を式(4)に代入すれば、球2の運動方程式として、
【数7】
または、DM=D/Mとして、
【数8】
を得る。
【0026】
プレート1を、y軸のまわりには固定し、x軸のまわりに回転させた場合も、(9)式において、θ’=θ’0sin(ωt+90°)である点を除いて、上記と同様である。
こうして、θが十分に小さい場合を考えると、X−Y平面上における球2の運動方程式は、
【数9】
となる。
【0027】
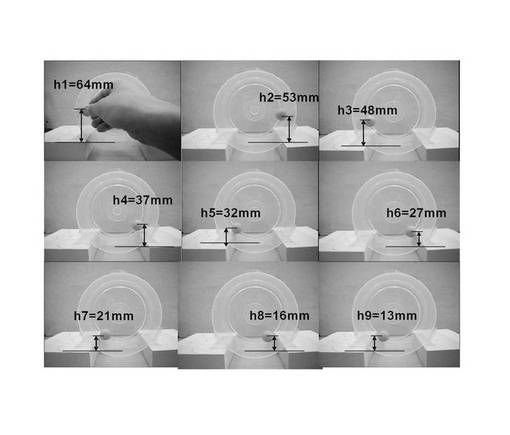
次に、減衰係数Dを実測する。これは、次のようにして行う。プレート1と同じ材料から形成された(この実施例では、アクリル製の)円筒(直径128mm)を横にするとともに、円筒の内壁面上に球2を配置して、転がり振り子を形成する。そして、図4に示すように、球2を手で持ち、円筒内壁面の初期位置h1(高さ64mm=円筒の半径R)に静止させた状態から、手を離し、球2を内壁面上で振り子運動させる。そして、球2が振り子運動の端に到達する毎に、その時の球2の高さh2、h3、h4、・・・hnを測定し、また、振れ幅b0、b0’、b1、b1’、・・・(ダッシュ記号は復路であることを示す)を測定する。測定結果を、図5のグラフに示した。図5のグラフにおいて、縦軸は、高さまたは振れ幅(mm)を表し、横軸は、経過時間(s)を表す。また、●は高さを、○は振れ幅をそれぞれ表す。
【0028】
また、この実験において、転がり振り子の周期を測定した結果、0.53秒の実測値を得た。一方、球2が滑ることなく転動するとして、理論計算で得られたこの転がり振り子の周期は、0.546秒であり、このことから、振り子運動の間に、球2は滑ることなく転動していたことが確認できた。
【0029】
そして、次の式(12)、(13)に従って、減衰係数Dを求める。
【数10】
ここで、δは対数減衰率であり、ζは減衰比である。また、mは球2の質量であり、kκ=5Mg/[7(R−r)]、ここで、Rは円筒の半径であり、rは球2の半径である。
計算の結果、この実験では、減衰係数D=0.053を得た。
【0030】
なお、上記式(12)、(13)は、球2に遠心力が作用しない場合の計算式であるから、球2に作用する遠心力による影響が反映されるように、上記実験で得られた減衰係数Dの値を補正する。この補正は、上記式(9)〜(11)を用いて数値計算することによって行う。
すなわち、球2の半径およびプレート1のサイズも考慮して、基準円の半径を予め決定し(例えば、100mm)、式(9)に適当なDの値(D=0.053の補正値)を代入して数値計算し、球2が基準円を描くような減衰係数Dの値を求めるとともに、θ0(水平位置からの最大回転角。以下「最大傾斜角」とよぶ)およびω(角速度)の値を決定する。
【0031】
この数値計算により、球2に作用する遠心力も考慮に入れた減衰係数として、D=0.016を得る。一方、θ0およびωについては、基準円の半径の1つの値に対し、θ0とωの組は無数に存在するので、それらの組のうち、現実の状況にあった適当なものを決定する。
【0032】
この場合、まず最大傾斜角θ0の許容される数値範囲を次のようにして決定する。
今、図2において、プレート1をx軸方向に角度θだけ傾斜させた場合、球2の初期速度をゼロとして、球2の移動距離L、球2の重心の斜面方向の加速度a、時間tは、次式を満たす。
【0033】
【数11】
【0034】
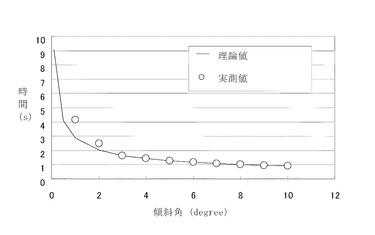
そして、実際にプレート1を傾斜させて球2をx軸方向に転がし、L=60cmに達するまでの時間tを実測するとともに、この実測値を、式(14)、(15)に従って求めた理論値と比較する。図6は、実測値と理論値との比較の結果を示したグラフである。図6のグラフにおいて、縦軸および横軸は、それぞれL=60cmに達するまでの時間(s)および傾斜角(°)であり、○は実測値を、実線は理論値をそれぞれ表す。
図6のグラフから、傾斜角θが小さい場合には、実測値と理論値は一致しないことがわかる。これは、球2が蛇行運動すること等による。しかし、傾斜角θが2°以上になると、球2が安定した転がり運動をするようになり、実測値と理論値がほぼ一致するようになる。
【0035】
実験の結果から、最大傾斜角θ0は2°以上であることが好ましいことがわかった。
なお、プレート1のx軸方向の長さ、およびy軸のまわりの回転速度(角速度ω)には制限があるので、最大傾斜角θ0があまり大きすぎると、球2をプレート面1a上でx軸方向に単振動させることができなくなる。この点を考慮して、最大傾斜角θ0の好ましい数値範囲は2°〜15°と決定した。
【0036】
そして、2°〜15°の範囲内にある適当な最大傾斜角θ0の値を決定し、それに対応するωの値を決定する。例えば、基準円の半径=100mm、最大傾斜角θ0=3°、ω=0.5rad/s(周期T=4.0sに相当)と決定する。
【0037】
こうして、球2をプレート面1a上に置き、xz平面およびyz平面において、それぞれ単振動させることによって、球2がプレート面1a上において円軌道を描いて転動するようにする。
そして、プレート面1a上における球2の運動の軌跡の基準円からの偏差を検出することによって、2軸のまわりの回転運動の同期精度を診断する(図1のS3)。
【0038】
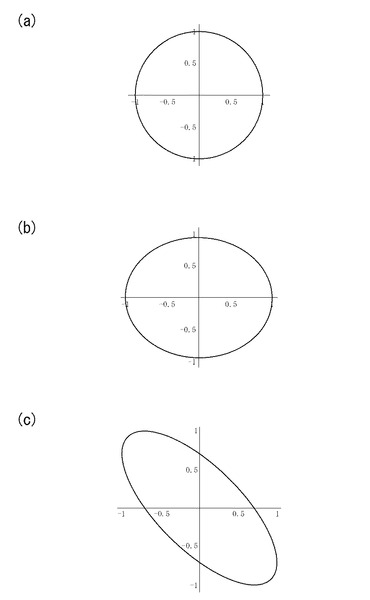
すなわち、図7aに示すように、球2の運動の軌跡が円となり、かつ基準円に一致またはほぼ一致する場合には、回転2軸運動の同期誤差は生じていないものと判定される。
また、図7bに示すように、球2の運動の軌跡が楕円となり、かつその楕円の長軸および短軸がx軸およびy軸に整合する場合には、同期誤差、すなわち、回転2軸運動の最大傾斜角(振幅)θ0に誤差が生じているものと判定される。
【0039】
この場合、同期誤差が一定であれば、回転2軸運動の最大傾斜角(振幅)θ0の誤差は、楕円の長軸および短軸の長さの差に比例するので、この比例関係に基づいて、回転2軸運動の最大傾斜角(振幅)θ0の誤差を定量的に診断することもできる。
【0040】
また、図7cに示すように、球2の運動の軌跡が楕円となり、かつその楕円の長軸および短軸がx軸およびy軸に整合しない場合には、同期誤差、すなわち、回転2軸運動の最大傾斜角(振幅)θ0および位相差αに誤差が生じているか、または位相差αのみに誤差が生じているものと判定される。
【0041】
この場合、同期誤差が一定であれば、回転2軸運動の位相差αの誤差は、楕円の長軸または短軸が回転2軸のうちの近い方の軸となす角度に比例するので、この比例関係に基づいて、回転2軸運動の位相差αの誤差を定量的に診断することもできる。
【0042】
(実験)
本発明の効果を実験によって確認した。
[実験1]
回転2軸運動し得るロボット(安川電機製双腕ロボットMOTOMAN-DIA10)に、上述のアクリル板からなるプレート1を取付け、プレート1上に上述の球2(マウスボール[直径22mm、質量31g、ゴム製外皮])を置き、2軸(x軸、y軸)の最大傾斜角がθ0+θ’0=6°の条件を満たし、2軸の位相差α=90°、周期T=3.3s、基準円の半径R=100mmとなるように回転2軸運動させ、時間経過に伴う球2の運動の軌跡をカメラで撮影した。また、プレート1にジャイロセンサーを配置して、回転2軸運動している間のプレート1の各軸に関する傾斜角度を測定した。
【0043】
カメラで撮影した画像から、球2の運動の軌跡が楕円となり、かつ楕円の長軸および短軸がx軸およびy軸に整合すること、並びに、Δθ=θ0−θ’0の値の変化につれて、楕円の長軸と短軸の比率が変化することが確認できた。
そして、カメラで撮影した画像とジャイロセンサーの測定値とに基づき、Δθ=θ0−θ’0と、それに対応する球2の楕円軌道の長軸および短軸の長さの差との関係を調べた。
一方、式(9)〜(11)を用い、D=0.016(DM=0.5)、θ0+θ’0=6°、T=3.3s、R=100mmの条件でシミュレーションを行い、Δθ=θ0−θ’0と、対応する楕円の長軸および短軸の長さの差との関係を調べた。
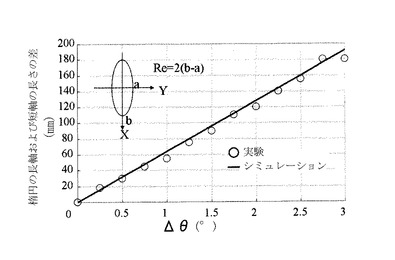
実験およびシミュレーションの結果を図8のグラフに示す。
【0044】
図8のグラフにおいて、縦軸は楕円の長軸および短軸の長さの差(mm)を、横軸はΔθ(°)をそれぞれ表している。また、グラフ中、○印は実験の結果を表し、実線はシミュレーションの結果を表している。
図8のグラフから、同期誤差が一定である場合、回転2軸運動の最大傾斜角(振幅)の誤差Δθは、球2の楕円軌道の長軸および短軸の長さの差と比例関係にあることが確認できた。
【0045】
[実験2]
実験1の場合と同じロボット、プレート1および球2を使用し、プレート1にはジャイロセンサーを配置し、2軸(x軸、y軸)の最大傾斜角がθ0+θ’0=6°の条件を満たし、周期T=3.3s、基準円の半径R=100mmとなり、2軸の回転運動の位相差αが90°から次第にずれるように回転2軸運動させ、時間経過に伴う球2の運動の軌跡をカメラで撮影した。また、プレート1にジャイロセンサーを配置して、回転2軸運動している間のプレート1の各軸に関する傾斜角を測定した。
【0046】
カメラで撮影した画像から、球2の運動の軌跡が楕円となり、かつ楕円の長軸および短軸がx軸およびy軸に整合しないこと、並びに、Δα=90°−αの値の変化につれて、楕円の長軸のx軸に対する傾斜角が変化することが確認できた。
そして、カメラで撮影した画像に基づき、Δα=90°−αと、それに対応する球2の楕円軌道の長軸がx軸となす角度βとの関係を調べた。
一方、式(9)〜(11)を用い、D=0.016(DM=0.5)、θ0+θ’0=6°、T=3.3s、R=100mmの条件でシミュレーションを行い、Δα=90°−αと、対応する楕円の長軸がx軸となす角度βとの関係を調べた。
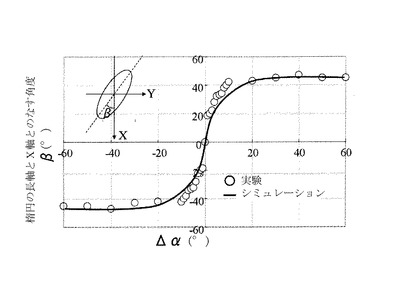
実験およびシミュレーションの結果を図9のグラフに示す。
【0047】
図9のグラフにおいて、縦軸は楕円の長軸がx軸となす角度β(°)を、横軸はΔα(°)をそれぞれ表している。また、グラフ中、○印は実験の結果を表し、実線はシミュレーションの結果を表している。
図9のグラフから、同期誤差が一定である場合、回転2軸運動の位相差の誤差Δαが0°〜約45°の範囲内においては、位相差の誤差Δαは、球2の楕円軌道の長軸がx軸となす角度と比例関係にあることが確認できた。
【符号の説明】
【0048】
1 プレート
1a プレート面
2 球
3 一方の回転軸
4 他方の回転軸
10 傾斜円テーブル
11 エンドプレート
【技術分野】
【0001】
本発明は、回転2軸運動、すなわち、直交する2軸のまわりの回転運動の同期精度を診断する方法に関する。
【背景技術】
【0002】
従来、金型等の工業製品に使用される部品の加工には、直交する並進3軸を備えた3軸制御マシニングセンタが使用されており、3軸制御マシニングセンタの任意の2軸の同期制御の精度を診断するためには、DBB(Double Ball Bar)法が一般に用いられている。
【0003】
DBB法によれば、トランスデューサを内蔵し、伸縮するバーが3軸制御マシニングセンタの2軸に保持されるとともに、円運動指令が与えられる。そして、3軸制御マシニングセンタが動作する間のバーの伸縮変化量が測定されることで、円運動に生じる半径方向の距離変動、すなわち基準円からの偏差が検出され、それによって2軸の同期制御の精度が診断される。
【0004】
また、近年、部品のより複雑な加工に対応するため、並進3軸に回転2軸を加えた5軸制御マシニングセンタが普及しつつある(例えば、特許文献1参照)。
図10aは、5軸制御立形マシニングセンサの1例を示す斜視図である。図10aに示すように、5軸制御立形マシニングセンタは、3軸制御立形マシニングセンタのテーブル上に、回転軸であるA軸およびC軸をもつ傾斜円テーブル10を搭載したものである。そして、5軸制御立形マシニングセンタは、回転2軸を割り出して(固定して)並進3軸で加工する動作モード、回転1軸のみ割り出して並進3軸と回転1軸で加工する動作モード、および、回転2軸と並進3軸を同時に動作させて加工する動作モード等で動作し得る。
【0005】
しかしながら、DBB法によれば、5軸制御立形マシニングセンタの、回転2軸(A軸およびC軸)のうちのいずれか一方を含む3軸の同期運動の精度を診断することはできるが、回転2軸運動の同期精度を診断することができなかった(例えば、特許文献2参照)。
そして、回転2軸運動の同期精度を診断するには、高価な高精度ジャイロセンサーを用いる等の、非常にコストのかかる方法しかなかった。また、たとえDBB法を発展させることで回転2軸運動の同期精度の診断が可能になったとしても、DBB法の実施にも高価なセンサーが必要であり、コストがかかるという問題があった。
【0006】
また、この回転2軸運動の同期精度の診断は、5軸制御マシニングセンタだけでなく、図10bに示すようなパラレルメカニズムにおいても、そのエンドプレート11を運動させるような場合に、必要であった。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2008−73813号公報
【特許文献2】特開2004−219132号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
したがって、本発明の課題は、回転2軸運動の同期精度を低コストで簡単に診断できる方法を提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決するため、本発明は、直交する2軸のまわりの回転運動の同期精度を診断する方法であって、(1)前記2軸のまわりに互いに独立に回転可能に支持された平坦なプレート面上の所定の位置に球を置き、(2)前記プレートを、水平位置から、前記2軸のうちの一方の軸のまわりに、サイン関数の振幅で与えた角度でもって周期的に回転運動させるとともに、前記2軸のうちの他方の軸のまわりに、前記サイン関数と位相が+90°異なるサイン関数の振幅で与えた角度でもって周期的に回転運動させることによって、前記球を前記プレート面上において滑り運動することなく転動させ、(3)前記プレート面上における前記球の運動の軌跡の、予め計算した基準円からの偏差を検出することによって、前記2軸のまわりの回転運動の同期精度を診断することを特徴とする方法を構成したものである。
【0010】
上記構成において、前記プレート面上における前記球の運動の軌跡が楕円となり、前記楕円の長軸および短軸が前記2軸に整合するとき、前記2軸のまわりの回転運動の振幅に誤差が生じているものと判定し、前記振幅の誤差が前記楕円の長軸および短軸の長さの差と比例関係にあることに基づき、前記振幅の誤差を定量的に検出することができる。
【0011】
あるいは、前記プレート面上における前記球の運動の軌跡が楕円となり、かつ、前記楕円の長軸または短軸が前記2軸に整合しないとき、前記2軸のまわりの回転運動の振幅および位相差に誤差が生じているか、または前記2軸のまわりの回転運動の位相差のみに誤差が生じているものと判定し、前記位相差の誤差が、前記長軸または前記短軸が前記2軸のうちの近い方の軸となす角度と比例関係にあることに基づき、前記位相差の誤差を定量的に検出することもできる。
【0012】
上記構成において、前記球は、球状の芯体および前記芯体の外面を取り巻く外被とからなる2層構造を有していることが好ましく、より好ましくは、前記芯体は、金属等の高密度の材料から形成され、前記外被は、ゴム等の柔軟な材料から形成される。
さらに、前記外被がゴムからなっている場合には、前記プレートはアクリル板からなっていることが好ましい。
【発明の効果】
【0013】
本発明によれば、回転2軸のまわりに互いに独立に回転可能に支持された平坦なプレート面上に球を置き、該プレートを、該2軸のまわりに互いに位相が90°ずれたサイン関数の振幅で与えた角度で周期的に回転運動させ、プレート面上における球の運動の軌跡の基準円からの偏差を検出することで、回転2軸運動の同期精度を診断するようにしたので、従来のような高価なDBBや高精度ジャイロセンサーを使用することなく、極めて簡単にかつ低コストで診断が行える。
【図面の簡単な説明】
【0014】
【図1】本発明による方法のフロー図である。
【図2】水平位置にあるプレート面上の所定位置に球を置いた状態を示す斜視図である。
【図3】図2をy軸方向に見た側面図であり、プレートをx軸方向に角度θ傾斜させた状態を示す図である。
【図4】球を転がり振り子運動させる実験の一連のプロセスを示す写真である。
【図5】球を転がり振り子運動させたときの、振り子運動の端での球の高さおよび振れ幅の測定値をプロットしたグラフである。
【図6】球を傾斜したプレート面上で転がしたときの、傾斜角と、球が所定の距離転がるまでの時間の測定値をプロットしたグラフである。
【図7】プレート面上における球の運動の軌跡を例示する平面図である。
【図8】2軸回転運動の振幅に誤差が生じている場合の、振幅の誤差と、プレート上の球の楕円軌道の長軸および短軸の長さの差との関係を示すグラフである。
【図9】2軸回転運動の振幅および位相差の両方、または位相差のみに誤差が生じている場合の、位相差の誤差と、プレート上の球の楕円軌道の長軸がx軸となす角度との関係を示すグラフである。
【図10】(a)は、5軸制御立形マシニングセンタの1例を示す斜視図であり、(b)は、パラレルメカニズムの1例を示す斜視図である。
【発明を実施するための形態】
【0015】
以下、添付図面を参照して本発明の好ましい実施例について説明する。図1は、本発明による方法のフロー図である。図1を参照して、本発明によれば、まず、図2に示すように、回転運動の同期精度を診断すべき2軸3、4のまわりに互いに独立に回転可能に支持された平坦なプレート面1a上の所定の位置に球2を置く(図1のS1)。なお、図2中、2軸3、4にそれぞれx軸およびy軸を設定した。
【0016】
この場合、球2は、球状の芯体および芯体の外面を取り巻く外被とからなる2層構造を有していることが好ましく、より好ましくは、芯体は、金属等の高密度の材料から形成され、外被は、ゴム等の柔軟な材料から形成される。
さらに、外被がゴムからなっている場合には、プレート1はアクリル板からなっていることが好ましい。
なお、この実施例では、球2として、コンピュータのマウスに組み込まれるマウスボール(直径22mm、質量31g、ゴム製外被)を使用し、プレート1として、アクリル板を使用する。
【0017】
次いで、プレート1を、水平位置から、2軸のうちの一方の軸(例えばy軸)のまわりに、サイン関数の振幅で与えた角度θ=θ0sinωt(ここで、θ0は水平位置からの最大回転角であり、ωは角速度であり、tは時間である。)でもって周期的に回転運動させるとともに、2軸のうちの他方の軸(例えばx軸)のまわりに、前記サイン関数と位相が+90°異なるサイン関数の振幅で与えた角度θ’=θ0sin(ωt+90°)でもって周期的に回転運動させることによって、球2をプレート面1a上において滑り運動することなく転動させる(図1のS2)。
【0018】
こうして、球2は、プレート1のy軸のまわりの回転運動により、zx平面上で見たとき、プレート面1a上において単振動するとともに、プレート1のx軸のまわりの回転運動により、yz平面上で見たとき、プレート面1a上において、前記単振動よりも+90°位相がずれて単振動する。その結果、xy平面上で見たとき、球2はプレート面1a上で円軌道を描いて転動する。
【0019】
この場合、θ0およびωの値は、球2の円軌道が予め決定された基準円となるように決定する。このθ0およびωの値の決定方法は次のとおりである。
今、図2において、プレート1をx軸およびy軸のまわりに上記回転運動をさせる場合について考える。図3は、プレート1を、x軸のまわりには固定し、y軸のまわりに回転させ、x方向に角度θだけ傾斜させた状態を示した図である。
【0020】
図3において、プレート1に固定された座標系をΣm(XmYmZm座標系)とし、球2の重心位置に固定された座標系をΣB(XBYBZB座標系)とする。また、球2に作用する力は、摩擦力fと、遠心力pと、重力Mgであるとする。なお、図3中、Fは、摩擦力fと遠心力pの合力を表している。
【0021】
このとき、プレート面1a上を転がる球2の運動方程式は、球2は密度が一定の中実体としてゴム製外被の影響を無視し、さらに、θ(t)=θ0sinωt(図3の水平位置から時計回りに測定したθの値を正とする。)とし、また、球2の速度に比例した減衰項を加えて、次式のようになる。
【数1】
ここで、mXBは座標系Σmから見た座標系ΣBのX座標であり、Mは球2の質量であり、gは重力加速度であり、Dは減衰係数である。
【0022】
また、球2の重心のまわりの回転運動に対する運動方程式は、次のようになる。
【数2】
ここで、Iは球2の中心のまわりの慣性モーメントであり、rは球2の半径である。
【0023】
式(2)を、
【数3】
と変形し、式(1)と式(3)から、
【数4】
を得る。
【0024】
また、球2は滑ることなく転動することから、次式が成立する。
【数5】
ここで、rは球2の半径であり、φは球2の回転角である。
そして、式(5)を時間tで微分することによって、
【数6】
を得る。
【0025】
式(6)、並びに、密度が一様な球体の慣性モーメントI=(2/5)Mr2を式(4)に代入すれば、球2の運動方程式として、
【数7】
または、DM=D/Mとして、
【数8】
を得る。
【0026】
プレート1を、y軸のまわりには固定し、x軸のまわりに回転させた場合も、(9)式において、θ’=θ’0sin(ωt+90°)である点を除いて、上記と同様である。
こうして、θが十分に小さい場合を考えると、X−Y平面上における球2の運動方程式は、
【数9】
となる。
【0027】
次に、減衰係数Dを実測する。これは、次のようにして行う。プレート1と同じ材料から形成された(この実施例では、アクリル製の)円筒(直径128mm)を横にするとともに、円筒の内壁面上に球2を配置して、転がり振り子を形成する。そして、図4に示すように、球2を手で持ち、円筒内壁面の初期位置h1(高さ64mm=円筒の半径R)に静止させた状態から、手を離し、球2を内壁面上で振り子運動させる。そして、球2が振り子運動の端に到達する毎に、その時の球2の高さh2、h3、h4、・・・hnを測定し、また、振れ幅b0、b0’、b1、b1’、・・・(ダッシュ記号は復路であることを示す)を測定する。測定結果を、図5のグラフに示した。図5のグラフにおいて、縦軸は、高さまたは振れ幅(mm)を表し、横軸は、経過時間(s)を表す。また、●は高さを、○は振れ幅をそれぞれ表す。
【0028】
また、この実験において、転がり振り子の周期を測定した結果、0.53秒の実測値を得た。一方、球2が滑ることなく転動するとして、理論計算で得られたこの転がり振り子の周期は、0.546秒であり、このことから、振り子運動の間に、球2は滑ることなく転動していたことが確認できた。
【0029】
そして、次の式(12)、(13)に従って、減衰係数Dを求める。
【数10】
ここで、δは対数減衰率であり、ζは減衰比である。また、mは球2の質量であり、kκ=5Mg/[7(R−r)]、ここで、Rは円筒の半径であり、rは球2の半径である。
計算の結果、この実験では、減衰係数D=0.053を得た。
【0030】
なお、上記式(12)、(13)は、球2に遠心力が作用しない場合の計算式であるから、球2に作用する遠心力による影響が反映されるように、上記実験で得られた減衰係数Dの値を補正する。この補正は、上記式(9)〜(11)を用いて数値計算することによって行う。
すなわち、球2の半径およびプレート1のサイズも考慮して、基準円の半径を予め決定し(例えば、100mm)、式(9)に適当なDの値(D=0.053の補正値)を代入して数値計算し、球2が基準円を描くような減衰係数Dの値を求めるとともに、θ0(水平位置からの最大回転角。以下「最大傾斜角」とよぶ)およびω(角速度)の値を決定する。
【0031】
この数値計算により、球2に作用する遠心力も考慮に入れた減衰係数として、D=0.016を得る。一方、θ0およびωについては、基準円の半径の1つの値に対し、θ0とωの組は無数に存在するので、それらの組のうち、現実の状況にあった適当なものを決定する。
【0032】
この場合、まず最大傾斜角θ0の許容される数値範囲を次のようにして決定する。
今、図2において、プレート1をx軸方向に角度θだけ傾斜させた場合、球2の初期速度をゼロとして、球2の移動距離L、球2の重心の斜面方向の加速度a、時間tは、次式を満たす。
【0033】
【数11】
【0034】
そして、実際にプレート1を傾斜させて球2をx軸方向に転がし、L=60cmに達するまでの時間tを実測するとともに、この実測値を、式(14)、(15)に従って求めた理論値と比較する。図6は、実測値と理論値との比較の結果を示したグラフである。図6のグラフにおいて、縦軸および横軸は、それぞれL=60cmに達するまでの時間(s)および傾斜角(°)であり、○は実測値を、実線は理論値をそれぞれ表す。
図6のグラフから、傾斜角θが小さい場合には、実測値と理論値は一致しないことがわかる。これは、球2が蛇行運動すること等による。しかし、傾斜角θが2°以上になると、球2が安定した転がり運動をするようになり、実測値と理論値がほぼ一致するようになる。
【0035】
実験の結果から、最大傾斜角θ0は2°以上であることが好ましいことがわかった。
なお、プレート1のx軸方向の長さ、およびy軸のまわりの回転速度(角速度ω)には制限があるので、最大傾斜角θ0があまり大きすぎると、球2をプレート面1a上でx軸方向に単振動させることができなくなる。この点を考慮して、最大傾斜角θ0の好ましい数値範囲は2°〜15°と決定した。
【0036】
そして、2°〜15°の範囲内にある適当な最大傾斜角θ0の値を決定し、それに対応するωの値を決定する。例えば、基準円の半径=100mm、最大傾斜角θ0=3°、ω=0.5rad/s(周期T=4.0sに相当)と決定する。
【0037】
こうして、球2をプレート面1a上に置き、xz平面およびyz平面において、それぞれ単振動させることによって、球2がプレート面1a上において円軌道を描いて転動するようにする。
そして、プレート面1a上における球2の運動の軌跡の基準円からの偏差を検出することによって、2軸のまわりの回転運動の同期精度を診断する(図1のS3)。
【0038】
すなわち、図7aに示すように、球2の運動の軌跡が円となり、かつ基準円に一致またはほぼ一致する場合には、回転2軸運動の同期誤差は生じていないものと判定される。
また、図7bに示すように、球2の運動の軌跡が楕円となり、かつその楕円の長軸および短軸がx軸およびy軸に整合する場合には、同期誤差、すなわち、回転2軸運動の最大傾斜角(振幅)θ0に誤差が生じているものと判定される。
【0039】
この場合、同期誤差が一定であれば、回転2軸運動の最大傾斜角(振幅)θ0の誤差は、楕円の長軸および短軸の長さの差に比例するので、この比例関係に基づいて、回転2軸運動の最大傾斜角(振幅)θ0の誤差を定量的に診断することもできる。
【0040】
また、図7cに示すように、球2の運動の軌跡が楕円となり、かつその楕円の長軸および短軸がx軸およびy軸に整合しない場合には、同期誤差、すなわち、回転2軸運動の最大傾斜角(振幅)θ0および位相差αに誤差が生じているか、または位相差αのみに誤差が生じているものと判定される。
【0041】
この場合、同期誤差が一定であれば、回転2軸運動の位相差αの誤差は、楕円の長軸または短軸が回転2軸のうちの近い方の軸となす角度に比例するので、この比例関係に基づいて、回転2軸運動の位相差αの誤差を定量的に診断することもできる。
【0042】
(実験)
本発明の効果を実験によって確認した。
[実験1]
回転2軸運動し得るロボット(安川電機製双腕ロボットMOTOMAN-DIA10)に、上述のアクリル板からなるプレート1を取付け、プレート1上に上述の球2(マウスボール[直径22mm、質量31g、ゴム製外皮])を置き、2軸(x軸、y軸)の最大傾斜角がθ0+θ’0=6°の条件を満たし、2軸の位相差α=90°、周期T=3.3s、基準円の半径R=100mmとなるように回転2軸運動させ、時間経過に伴う球2の運動の軌跡をカメラで撮影した。また、プレート1にジャイロセンサーを配置して、回転2軸運動している間のプレート1の各軸に関する傾斜角度を測定した。
【0043】
カメラで撮影した画像から、球2の運動の軌跡が楕円となり、かつ楕円の長軸および短軸がx軸およびy軸に整合すること、並びに、Δθ=θ0−θ’0の値の変化につれて、楕円の長軸と短軸の比率が変化することが確認できた。
そして、カメラで撮影した画像とジャイロセンサーの測定値とに基づき、Δθ=θ0−θ’0と、それに対応する球2の楕円軌道の長軸および短軸の長さの差との関係を調べた。
一方、式(9)〜(11)を用い、D=0.016(DM=0.5)、θ0+θ’0=6°、T=3.3s、R=100mmの条件でシミュレーションを行い、Δθ=θ0−θ’0と、対応する楕円の長軸および短軸の長さの差との関係を調べた。
実験およびシミュレーションの結果を図8のグラフに示す。
【0044】
図8のグラフにおいて、縦軸は楕円の長軸および短軸の長さの差(mm)を、横軸はΔθ(°)をそれぞれ表している。また、グラフ中、○印は実験の結果を表し、実線はシミュレーションの結果を表している。
図8のグラフから、同期誤差が一定である場合、回転2軸運動の最大傾斜角(振幅)の誤差Δθは、球2の楕円軌道の長軸および短軸の長さの差と比例関係にあることが確認できた。
【0045】
[実験2]
実験1の場合と同じロボット、プレート1および球2を使用し、プレート1にはジャイロセンサーを配置し、2軸(x軸、y軸)の最大傾斜角がθ0+θ’0=6°の条件を満たし、周期T=3.3s、基準円の半径R=100mmとなり、2軸の回転運動の位相差αが90°から次第にずれるように回転2軸運動させ、時間経過に伴う球2の運動の軌跡をカメラで撮影した。また、プレート1にジャイロセンサーを配置して、回転2軸運動している間のプレート1の各軸に関する傾斜角を測定した。
【0046】
カメラで撮影した画像から、球2の運動の軌跡が楕円となり、かつ楕円の長軸および短軸がx軸およびy軸に整合しないこと、並びに、Δα=90°−αの値の変化につれて、楕円の長軸のx軸に対する傾斜角が変化することが確認できた。
そして、カメラで撮影した画像に基づき、Δα=90°−αと、それに対応する球2の楕円軌道の長軸がx軸となす角度βとの関係を調べた。
一方、式(9)〜(11)を用い、D=0.016(DM=0.5)、θ0+θ’0=6°、T=3.3s、R=100mmの条件でシミュレーションを行い、Δα=90°−αと、対応する楕円の長軸がx軸となす角度βとの関係を調べた。
実験およびシミュレーションの結果を図9のグラフに示す。
【0047】
図9のグラフにおいて、縦軸は楕円の長軸がx軸となす角度β(°)を、横軸はΔα(°)をそれぞれ表している。また、グラフ中、○印は実験の結果を表し、実線はシミュレーションの結果を表している。
図9のグラフから、同期誤差が一定である場合、回転2軸運動の位相差の誤差Δαが0°〜約45°の範囲内においては、位相差の誤差Δαは、球2の楕円軌道の長軸がx軸となす角度と比例関係にあることが確認できた。
【符号の説明】
【0048】
1 プレート
1a プレート面
2 球
3 一方の回転軸
4 他方の回転軸
10 傾斜円テーブル
11 エンドプレート
【特許請求の範囲】
【請求項1】
直交する2軸のまわりの回転運動の同期精度を診断する方法であって、
(1)前記2軸のまわりに互いに独立に回転可能に支持された平坦なプレート面上の所定の位置に球を置き、
(2)前記プレートを、水平位置から、前記2軸のうちの一方の軸のまわりに、サイン関数の振幅で与えた角度でもって周期的に回転運動させるとともに、前記2軸のうちの他方の軸のまわりに、前記サイン関数と位相が+90°異なるサイン関数の振幅で与えた角度でもって周期的に回転運動させることによって、前記球を前記プレート面上において滑り運動することなく転動させ、
(3)前記プレート面上における前記球の運動の軌跡の、予め計算した基準円からの偏差を検出することによって、前記2軸のまわりの回転運動の同期精度を診断することを特徴とする方法。
【請求項2】
前記プレート面上における前記球の運動の軌跡が楕円となり、前記楕円の長軸および短軸が前記2軸に整合するとき、前記2軸のまわりの回転運動の振幅に誤差が生じているものと判定し、前記振幅の誤差が前記楕円の長軸および短軸の長さの差と比例関係にあることに基づき、前記振幅の誤差を定量的に検出することを特徴とする請求項1に記載の方法。
【請求項3】
前記プレート面上における前記球の運動の軌跡が楕円となり、かつ、前記楕円の長軸または短軸が前記2軸に整合しないとき、前記2軸のまわりの回転運動の振幅および位相差に誤差が生じているか、または前記2軸のまわりの回転運動の位相差のみに誤差が生じているものと判定し、前記位相差の誤差が、前記長軸または前記短軸が前記2軸のうちの近い方の軸となす角度と比例関係にあることに基づき、前記位相差の誤差を定量的に検出することを特徴とする請求項1に記載の方法。
【請求項4】
前記プレートの前記水平位置からの最大回転角は、2°〜15°であることを特徴とする請求項1〜請求項3のいずれかに記載の方法。
【請求項5】
前記球は、球状の芯体および前記芯体の外面を取り巻く外被とからなる2層構造を有していることを特徴とする請求項1〜請求項4のいずれかに記載の方法。
【請求項6】
前記芯体は高密度の材料から形成され、前記外被は柔軟な材料から形成されることを特徴とする請求項5に記載の方法。
【請求項7】
前記外被はゴムからなっていることを特徴とする請求項5または請求項6に記載の方法。
【請求項8】
前記芯体は、金属からなっていることを特徴とする請求項5〜請求項7のいずれかに記載の方法。
【請求項9】
前記プレートはアクリル板からなっていることを特徴とする請求項7または請求項8に記載の方法。
【請求項1】
直交する2軸のまわりの回転運動の同期精度を診断する方法であって、
(1)前記2軸のまわりに互いに独立に回転可能に支持された平坦なプレート面上の所定の位置に球を置き、
(2)前記プレートを、水平位置から、前記2軸のうちの一方の軸のまわりに、サイン関数の振幅で与えた角度でもって周期的に回転運動させるとともに、前記2軸のうちの他方の軸のまわりに、前記サイン関数と位相が+90°異なるサイン関数の振幅で与えた角度でもって周期的に回転運動させることによって、前記球を前記プレート面上において滑り運動することなく転動させ、
(3)前記プレート面上における前記球の運動の軌跡の、予め計算した基準円からの偏差を検出することによって、前記2軸のまわりの回転運動の同期精度を診断することを特徴とする方法。
【請求項2】
前記プレート面上における前記球の運動の軌跡が楕円となり、前記楕円の長軸および短軸が前記2軸に整合するとき、前記2軸のまわりの回転運動の振幅に誤差が生じているものと判定し、前記振幅の誤差が前記楕円の長軸および短軸の長さの差と比例関係にあることに基づき、前記振幅の誤差を定量的に検出することを特徴とする請求項1に記載の方法。
【請求項3】
前記プレート面上における前記球の運動の軌跡が楕円となり、かつ、前記楕円の長軸または短軸が前記2軸に整合しないとき、前記2軸のまわりの回転運動の振幅および位相差に誤差が生じているか、または前記2軸のまわりの回転運動の位相差のみに誤差が生じているものと判定し、前記位相差の誤差が、前記長軸または前記短軸が前記2軸のうちの近い方の軸となす角度と比例関係にあることに基づき、前記位相差の誤差を定量的に検出することを特徴とする請求項1に記載の方法。
【請求項4】
前記プレートの前記水平位置からの最大回転角は、2°〜15°であることを特徴とする請求項1〜請求項3のいずれかに記載の方法。
【請求項5】
前記球は、球状の芯体および前記芯体の外面を取り巻く外被とからなる2層構造を有していることを特徴とする請求項1〜請求項4のいずれかに記載の方法。
【請求項6】
前記芯体は高密度の材料から形成され、前記外被は柔軟な材料から形成されることを特徴とする請求項5に記載の方法。
【請求項7】
前記外被はゴムからなっていることを特徴とする請求項5または請求項6に記載の方法。
【請求項8】
前記芯体は、金属からなっていることを特徴とする請求項5〜請求項7のいずれかに記載の方法。
【請求項9】
前記プレートはアクリル板からなっていることを特徴とする請求項7または請求項8に記載の方法。
【図1】

【図2】

【図3】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図4】
【図2】
【図3】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図4】
【公開番号】特開2012−101348(P2012−101348A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2011−222764(P2011−222764)
【出願日】平成23年10月7日(2011.10.7)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 2011年9月5日に公益社団法人精密工学会が発行した「2011年度精密工学会秋季大会 学術講演会 講演論文集」において発表
【出願人】(503027931)学校法人同志社 (346)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成23年10月7日(2011.10.7)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 2011年9月5日に公益社団法人精密工学会が発行した「2011年度精密工学会秋季大会 学術講演会 講演論文集」において発表
【出願人】(503027931)学校法人同志社 (346)
【Fターム(参考)】
[ Back to top ]