
図書保管管理装置及び図書保管管理方法
【課題】書棚に対してコンテナ等を確実に搬入し搬出することができる図書保管管理装置及び図書保管管理方法を提供する。
【解決手段】書棚11に収容されるコンテナ12と、コンテナに付着されコンテナの識別情報と書棚におけるコンテナが収容される位置情報を格納する記憶素子と、コンテナを書棚に搬入する、または、書棚からコンテナを搬出する搬送手段15と、搬送手段に設けられコンテナに付着された記憶素子が格納する情報を読み取り、または、記憶素子に情報を書き込む読取書込部と、読取書込部により記憶素子に対して位置情報を書込み、または、識別情報および位置情報を読み出すことによりコンテナを管理し、コンテナを書棚に搬入、または、搬出するべく搬送手段を制御する制御部をもつ図書保管管理装置。
【解決手段】書棚11に収容されるコンテナ12と、コンテナに付着されコンテナの識別情報と書棚におけるコンテナが収容される位置情報を格納する記憶素子と、コンテナを書棚に搬入する、または、書棚からコンテナを搬出する搬送手段15と、搬送手段に設けられコンテナに付着された記憶素子が格納する情報を読み取り、または、記憶素子に情報を書き込む読取書込部と、読取書込部により記憶素子に対して位置情報を書込み、または、識別情報および位置情報を読み出すことによりコンテナを管理し、コンテナを書棚に搬入、または、搬出するべく搬送手段を制御する制御部をもつ図書保管管理装置。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、コンテナに取り付けられた無線タグ等の記憶媒体に格納した位置情報により書棚へのコンテナの格納場所を管理する図書保管管理装置及び方法に関する。
【背景技術】
【0002】
周知のように、近年、多量の蔵書を有する大規模図書館等にあっては、図書の収容効率の高い閉架書庫方式が採用される傾向にある。そして、このような閉架書庫に対する図書の取り出しや返却に要する作業の能率向上を図るために、自動入出庫システムが導入されてきている。
【0003】
この自動入出庫システムは、貸し出しが要求された図書を書庫から取り出してカウンターまで搬送し、その図書に対する貸し出し登録を行なう作業や、返却された図書に対する貸し出し登録を削除し、その図書を書庫まで戻して収容位置を記録する作業等を自動化して、閉架書庫に対する図書の取り出し及び返却作業を、正確かつ迅速に実行することができるようにしたものである。
【0004】
すなわち、この種の自動入出庫システムにおいては、保管されている多量の図書の管理を容易にするために、各図書それぞれにバーコードや無線タグ等を付している。また、各図書は、複数冊毎にコンテナに収容されており、書庫に対してコンテナ単位で入出庫されるようになされている。
【0005】
そして、図書の取り出し(貸し出し)が要求された場合には、その図書の収容されたコンテナが書庫から自動出庫されてステーションまで搬送され、図書館員は、ステーションに搬送されてきたコンテナの中から要求された図書を取り出して、図書に貼付されたバーコードラベル又は、RFIDタグ等を読み取り、利用者に渡し、ここに、図書の貸し出しが行なわれる。
【0006】
また、図書の返却が要求された場合には、その返却図書を収容すべきコンテナが書庫から自動出庫されステーションに取り出される。図書館員は、図書に貼付されたバーコードラベル又は、RFIDタグ等を読み取り、ステーションに取り出されたコンテナに返却された図書を収容させた後にそのコンテナを書庫に入庫させ、ここに、図書の返却が行なわれる。
【0007】
このような自動入出庫システムを備えた図書保管管理装置において、特に肝要なことは書庫へコンテナを搬入する際に、そのコンテナの搬入先に既に他のコンテナが収容されているか否かを正確に判別して、二重入庫のような事故の発生を未然に防止するための対策を施すことである。
【0008】
特許文献1は、荷検知センサを設けることで、格納場所に荷が存在するかどうかを判断する技術を開示している。
【0009】
特許文献2も、荷物を検知するための光学センサを用意し、センサからの信号により、荷物が存在するかどうかを判断する技術を開示している。
【0010】
特許文献3も、荷検知センサや測距センサを使用して、荷物が存在するかどうかを判断する技術を開示している。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2007−276897号公報
【特許文献2】特開2005−306499号公報
【特許文献3】特開2007−055720号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献1乃至3においては、棚にコンテナや荷物が存在するかどうかを判断するための光学センサや測距センサを用いているが、感度調整や角度調整に時間がかかってしまう。また、スタッカクレーンの停止位置のズレやコンテナの汚れ具合等による誤認識により、荷同士の衝突という重大事故に繋がるケースも発生する。
【0013】
本発明は、誤認識のない容易なコンテナ確認を行なうことができる図書保管管理装置及び図書保管管理方法を提供することを目的とする。
【課題を解決するための手段】
【0014】
課題を解決するための一実施形態は、
書棚に収容されるコンテナと、
前記コンテナに付着され、前記コンテナの識別情報と前記書棚における前記コンテナが収容される位置情報を格納する記憶素子と、
前記コンテナを前記書棚に搬入する、または、前記書棚から前記コンテナを搬出する搬送手段と、
前記搬送手段に設けられ、前記コンテナに付着された記憶素子が格納する情報を読み取り、または、前記記憶素子に情報を書き込む読取書込部と、
前記読取書込部により前記記憶素子に対して前記位置情報を書込み、または、前記識別情報および前記位置情報を読み出すことにより前記コンテナを管理し、前記コンテナを前記書棚に搬入、または、搬出するべく前記搬送手段を制御する制御部と、
を具備することを特徴とする図書保管管理装置である。
【0015】
また、課題を解決するための他の一実施形態は、
書棚に収容されるコンテナと、前記コンテナに付着され、前記コンテナの識別情報と前記書棚における前記コンテナが収容される位置情報を格納する記憶素子に対し、
前記識別情報を書込み、または、前記識別情報および前記位置情報を読み出すことにより前記コンテナを管理して、前記コンテナを前記書棚に搬入し、または、搬出する図書保管管理方法である。
【発明の効果】
【0016】
コンテナの識別情報とロケーション情報(位置情報)を記憶させる無線タグをコンテナに取り付けて、コンテナ搬入、搬出の際に、この無線タグの位置情報を書き込み、識別情報、位置情報を読み出すことにより、コンテナの存在や棚における位置を容易かつ確実に認識することで、例えばコンテナ同士の衝突を未然に回避することができる。
【図面の簡単な説明】
【0017】
【図1】この発明の実施の形態を示すもので、図書自動管理システムの全体的な構成を説明するために示す斜視図。
【図2】同実施の形態におけるコンテナとこのコンテナに取り付けられる無線タグとの関係を説明するために示す斜視図。
【図3】同実施の形態における2階ステーションの詳細な構成を説明するために示す斜視図。
【図4】同実施の形態における図書自動管理システムの統括制御盤の詳細を説明するために示すブロック構成図。
【図5】同実施の形態における図書自動管理システムのゲート状のタグリーダ/ライタと周辺回路を示す説明図。
【図6】同実施の形態における図書自動管理システムの書棚群の一例を示す説明図。
【図7】同実施の形態における図書自動管理システムのコンテナ搬出の動作の一例を説明するために示すフローチャート。
【図8】同実施の形態における図書自動管理システムのコンテナ搬入の動作の一例を説明するために示すフローチャート。
【図9】同実施の形態における図書自動管理システムにおいてトレイをペア単位で搬出する一例を示す説明図。
【図10】同実施の形態における図書自動管理システムにおいてトレイをペア単位で搬入する一例を示す説明図。
【図11】同実施の形態における図書自動管理システムにおいてトレイをペア単位で搬入する一例を示す説明図。
【発明を実施するための形態】
【0018】
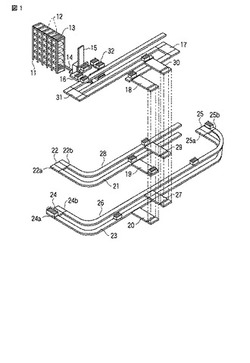
以下、この発明の実施の形態について図面を参照して詳細に説明する。図1は、この実施の形態で説明する図書自動管理システムの全体的な構成を示している。すなわち、図1において、符号11は書棚である。
【0019】
この書棚11は、例えば図書館の3階の書棚内に設置されている。この書棚11には、複数のコンテナ12が収容されている。これらコンテナ12には、詳細は後述するが、それぞれ、複数の図書13を収容している。
【0020】
上記書棚11の前面には、レール14に案内されて走行可能なスタッカクレーン15が設置されている。このスタッカクレーン15は、図書13の出庫時に、書棚11から所望のコンテナ12を取り出して出庫用ラックステーション16に搬送する。
【0021】
この出庫用ラックステーション16に搬送されたコンテナ12は、搬送コンベア17を介してコンテナ搬出口18に搬送された後、図示しない垂直搬送機を介して、2階向コンテナ搬入口19または1階向コンテナ搬入口20に選択的に搬送される。
【0022】
そして、2階向コンテナ搬入口19に搬送されたコンテナ12は、搬送コンベア21を介して、カウンターである2階のステーション22のコンテナ受入部22aに搬送される。また、1階向コンテナ搬入口20に搬送されたコンテナ12は、搬送コンベア23を介して、カウンターである1階ステーション24または25のコンテナ受入部24a,25aに搬送される。
【0023】
一方、1階ステーション24または25のコンテナ受入部24a,25aにあるコンテナ12は、コンテナ排出部24b,25bに移送され、搬送コンベア26を介して、1階向コンテナ搬出口27に搬送される。
【0024】
また、2階のステーション22のコンテナ受入部22aにあるコンテナ12は、コンテナ排出部22bに移送され、搬送コンベア28を介して、2階向コンテナ搬出口29に搬送される。
【0025】
このように、1階向コンテナ搬出口27または2階向コンテナ搬出口29に搬送されたコンテナ12は、図示しない垂直搬送機を介して、3階のコンテナ搬入口30に搬送される。このコンテナ搬入口30に搬送されたコンテナ12は、搬送コンベア31を介して、入庫用ラックステーション32に搬送された後、スタッカクレーン15により書棚11に入庫される。
【0026】
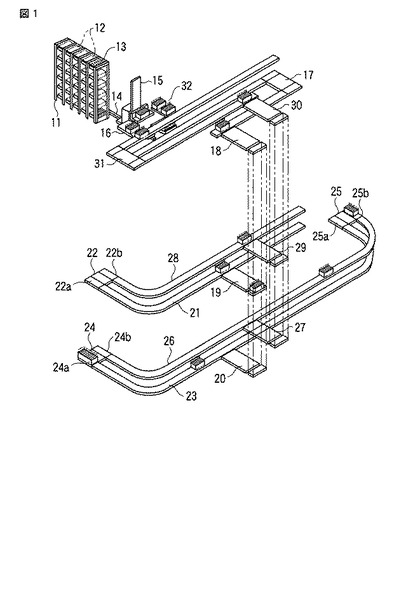
ここで、上記コンテナ12には、図2に示すように、複数の図書13が、その背表紙を同一方向に向けた状態で、厚み方向に1列に並んで収容されるようになっている。また、各図書13には、無線タグ33がそれぞれ付着されている。これら無線タグ33には、バーコードも記載されている。
【0027】
すなわち、無線タグ33には、図書13毎に固有の図書コードが予め書き込まれている。そして、この無線タグ33の表面に、バーコードリーダ65等で読み取り可能なバーコードが印字されたラベルが貼付されている。
【0028】
また、各コンテナ12にも、それぞれ固有の識別コードである無線タグ41が付されており、コンテナ12の識別コードと、そのコンテナ12の書棚11内における位置情報と、そのコンテナ12に収容されている全ての図書13の図書コードが対応付けられ、図書情報として管理されている。
【0029】
2階のステーション22または1階ステーション24,25等において、コンテナ12に対して図書13の取り出しや返却が行なわれる際には、コンテナ12から取り出された図書13やコンテナ12に入庫する図書13の無線タグ33(またはバーコード)から図書コードが読み取られて、元の図書情報が更新されるようになっている。
【0030】
ただし、このバーコードラベルは、図書13の無線タグ33とは別の箇所(図書13を開かないで見える位置)に貼付されていてもよい。この場合、無線タグ33の付される位置は、図書13のどこでもよいことになる。
【0031】
これら記憶素子である無線タグ33に記憶されている図書コード、または、無線タグ33の表面または図書13上に設けられた記憶素子であるバーコードラベルに記載されている図書コードは、後述するステーションに設置されるバーコードリーダ65等またはカウンター台34上の平置きアンテナをもつ無線タグリーダ/ライタ37により検出されるものである。
【0032】
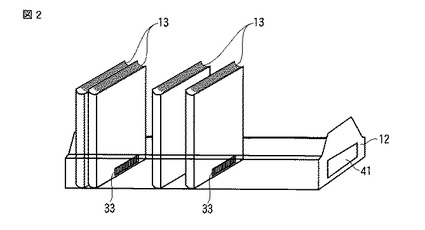
次に、図3は、上記2階のステーション22の詳細を示している。なお、1階ステーション24,25については、2階のステーション22と同様な構成であるため、その説明を省略する。すなわち、この2階のステーション22には、カウンター台34が設置されている。
【0033】
このカウンター台34の裏側には、前記コンテナ受入部22aとコンテナ排出部22bとが配置されている。そして、搬送コンベア21を介して2階のステーション22に搬送されてきたコンテナ12は、コンテナ受入部22aで受け入れられた後、コンテナ排出部22bに移送されて保持される。
【0034】
また、上記カウンター台34には、コンテナ排出部22bに対応する部分に開口部34aが形成されている。そして、図書館員は、この開口部34aを介することにより、コンテナ排出部22bに保持されたコンテナ12に対して、図書13の取り出しや返却を行なうことができる。
【0035】
この場合、カウンター台34の開口部34aからは、コンテナ12内に厚み方向に1列になって収容されている図書13の背表示が露出されることになる。そして、このコンテナ排出部22bに保持されたコンテナ12は、搬送コンベア28を介して2階向コンテナ搬出口29に搬送される。
【0036】
さらに、上記カウンター台34上には、図書館員が図書13の貸し出しまたは返却に関する種々の操作を行なうとともに、操作案内や必要な表示を行なうための入力タッチパネル式の表示パネル35と、図書に貼付されたバーコードラベルを読み取るバーコードリーダ65等および無線タグ33の図書コードを読み取る無線タグリーダ/ライタ37が設置されている。
【0037】
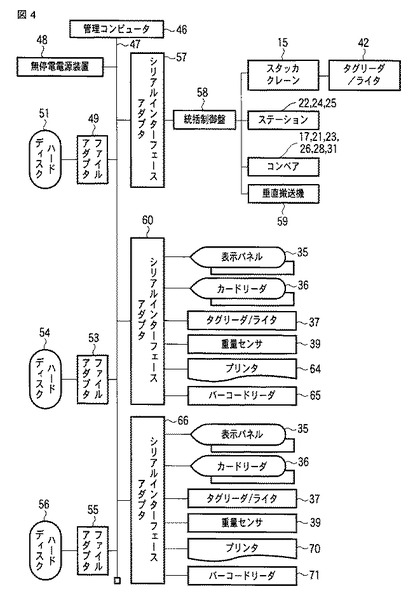
次に、図4は、上記のような図書自動管理システムに使用される制御系を示している。すなわち、図4において、符号46は管理コンピュータである。この管理コンピュータ46は、図示しないCPU等の制御部を有している。管理コンピュータ46は、バスライン47を介して無停電電源装置48が接続されている。
【0038】
また、この管理コンピュータ46には、バスライン47からファイルアダプタ49を経て、システムの制御プログラムが記憶されたハードディスク51が接続されている。
【0039】
さらに、この管理コンピュータ46には、バスライン47からファイルアダプタ53を経て、上記した図書情報の記憶されたハードディスク54が接続されている。また、この管理コンピュータ46には、バスライン47からファイルアダプタ55を経て、バックアップ情報の記憶されたハードディスク56が接続される。
【0040】
一方、上記管理コンピュータ46には、バスライン47からシリアルインターフェースアダプタ57を経て、統括制御盤58が接続されている。この統括制御盤58は、スタッカクレーン15、2階のステーション22及び1階ステーション24,25、搬送コンベア17,21,23,26,28,31、垂直搬送機59等の動作を統括的に管理している。
【0041】
また、スタッカクレーン15には、コンテナ12に貼付された無線タグ41に対しデータの書き込みおよび読み出しを行なうタグリーダ/ライタ42が接続されている。
【0042】
また、上記管理コンピュータ46には、バスライン47からシリアルインターフェースアダプタ60を経て、表示パネル35、カウンター台に平置きされた無線タグリーダ/ライタ37、利用者に図書13の貸出票を発行するためのプリンタ64及びバーコードリーダ65が接続されている。
【0043】
そして、これら表示パネル35、カウンター台に平置きされた無線タグリーダ/ライタ37、プリンタ64及びバーコードリーダ65等は、2階のステーション22に設置されている。
【0044】
さらに、上記管理コンピュータ46には、バスライン47からシリアルインターフェースアダプタ66を経て、表示パネル35、カウンター台に平置きされた無線タグリーダ/ライタ37、プリンタ70及びバーコードリーダ71が接続されている。そして、これら表示パネル35、カウンター台に平置きされた無線タグリーダ/ライタ37、プリンタ70及びバーコードリーダ71等は、1階ステーション24,25にそれぞれ設置されている。
【0045】
ここで、図5は、上記統括制御盤58の詳細を示している。すなわち、上記バスライン47は、シリアルインターフェースアダプタ57を経た後、入出力回路58aを介して制御回路58bに接続される。この制御回路58bは、入出力回路58cを介して、各制御対象であるスタッカクレーン15、2階のステーション22及び1階ステーション24,25、搬送コンベア17,21,23,26,28,31、垂直搬送機59をそれぞれ統括的に管理している。また、上記入出力回路58aには、通信記憶部58dが接続されている。
【0046】
そして、上記スタッカクレーン15、2階のステーション22及び1階ステーション24,25、搬送コンベア17,21,23,26,28,31、垂直搬送機59等の制御対象は、それぞれ、入出力回路58cからの制御信号を受ける制御回路72a〜72dと、この制御回路72a〜72dの制御に基づいて制御対象を駆動させる駆動回路73a〜73dと、制御対象の位置等を検出するための検出器74a〜74dとを有している。
【0047】
また、図6は、書棚11とスタッカクレーン15との関係の一例を示している。この例では、書棚11がスタッカクレーン15からみて手前側と奥側とにそれぞれコンテナ12を収容することができるようになっている。そして、スタッカクレーン15は、管理コンピュータ46および統括制御盤58の制御により、書棚11の任意のロケーションにコンテナを移動することができる。
【0048】
(コンテナの搬出と搬入)
上記のような構成となされた図書自動管理システムにおいて、以下、その特徴的なコンテナ排出およびコンテナ搬入処理について、図7および図8のフローチャートと、図9乃至図11の説明図を参照して説明する。すなわち、図書自動管理システムにおいて、コンテナ12は、書棚11から搬出処理され、また、書棚11へと搬入処理がなされる。初めに、一般的なコンテナ搬出およびコンテナ搬入について、フローチャートを用いて説明する。
【0049】
・コンテナ搬入
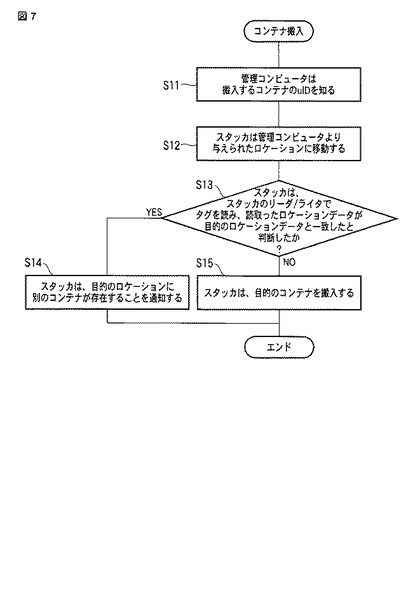
初めに、コンテナ搬入処理を図7のフローチャートを用いて説明する。スタッカクレーン15は、ステーションにおいて、搬入すべきコンテナ12をスタッカクレーン15の荷台上に積み込み、荷台上のタグリーダ/ライタ42を用いて荷台上に積み込まれたコンテナ12の無線タグ41のユニークIDを読み取り、管理コンピュータ46に通知する。管理コンピュータ46は、ユニークIDに対応するロケーションを予め与えられたデータ等から決定し(ステップS11)、スタッカクレーン15にロケーションを通知する。スタッカクレーン15は上記のロケーションに移動する(ステップS12)。スタッカクレーン15は、リーダ/ライタ42で情報を読み取り、積み込まれたコンテナ12のユニークID以外で、読み取りができたロケーションデータが移動の目標のロケーションデータと一致するかどうかを判断する(ステップS13)。スタッカクレーン15は、リーダ/ライタ42で無線タグ41を読んだ結果、積み込まれたコンテナ12のユニークID以外で、読み取りができたロケーションデータが移動の目標のロケーションデータと一致したと判断した場合は、目標のロケーションに別のコンテナが存在することを管理コンピュータ46に通知し、表示パネル35等に表示することでユーザ等に通知する(ステップS14)。また、スタッカクレーン15は、読み取りができたロケーションデータが、積み込まれたコンテナ12のユニークID以外で、移動の目標のロケーションデータと一致しなかったと判断した場合は、コンテナ12を目標の書棚11のロケーションに搬入する(ステップS15)。このとき、スタッカクレーン15は、スタッカクレーン15に付加したタグリーダ/ライタ42で無線タグ41の位置情報を現在の位置に書き換える。
【0050】
・コンテナ搬出
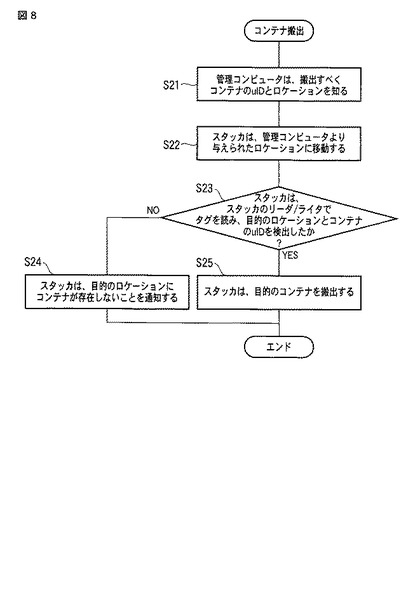
次に、コンテナ搬出処理を図8のフローチャートを用いて説明する。管理コンピュータ46は、コンテナ搬出のために、コンテナ12のu(ユニーク)IDと搬出先である書棚11のロケーションを決定する(ステップS21)。次に、管理コンピュータ46は、統括制御盤58を介し、スタッカクレーン15の制御によってコンテナ12を与えられたロケーションに移動させる(ステップS22)。スタッカクレーン15は、スタッカクレーン15に付加したタグリーダ/ライタ42で無線タグ41の情報を読み出し、目的のロケーションとコンテナのuIDが検出できたかどうかを判断する(ステップS23)。スタッカクレーン15が目的のロケーションとコンテナのuIDを検出しなければ、スタッカクレーン15は、管理コンピュータ46に通知し、表示パネル35等に表示することでユーザに通知する(ステップS24)。スタッカクレーン15が目的のロケーションとコンテナのuIDを検出した場合は、スタッカクレーン15は、目標のコンテナ12を書棚11のロケーションから搬出する(ステップS25)。
【0051】
このように、本発明に係る図書自動管理システムによれば、コンテナ12の搬入、搬出において、コンテナ12に取り付けた無線タグ41の位置情報の読み取り・書き換えにより管理するものである。これにより、コンテナの存在や棚における位置を容易かつ確実に認識することができる。従って、管理機を使用しないオフライン又は手動操作を行ったとしても、データ管理上の誤操作が防止できる。これにより、管理コンピュータがダウンした場合の運用や、管理コンピュータのメンテナンス等を容易に行なえるようになる。すなわち、コンテナ自身がロケーションデータを持っているため、管理コンピュータと実際のコンテナ12の位置との不整合を防止することができる。
【0052】
また、書棚11にコンテナ12を格納する時、その場所に他のコンテナ12が既に格納されているか否かを確認することにより、二重にコンテナを書棚11に格納することがなくなるため、コンテナ同士の衝突を防止することができる。
【0053】
また、従来、書棚にコンテナがあるか否かを光電センサで行っているが、感度調整や角度調整等の調整に時間が掛かっていた。更に、スタッカクレーンの停止位置のズレやコンテナの汚れ具合等による誤認識により、衝突という重大事故に繋がったケースも発生していた。しかし、本発明に係る図書自動管理システムによれば、無線によりデータを読み出して確認するため、調整も容易であり、誤認識の発生もない。
【0054】
また、後述するWコンテナ運用においては、格納位置の確認のみならずペアであるか否かの確認も行なえるため、より正確な保管管理が可能となる。
【0055】
(具体的なコンテナの搬送例)
次に、図9乃至図11の例を用いて、具体的なコンテナの搬送例を説明する。
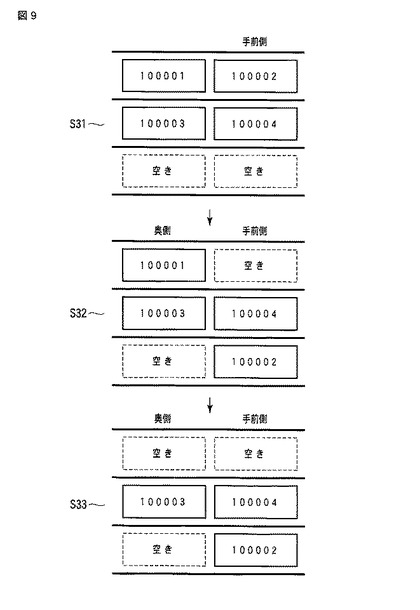
ここで、一例として、図9に示すように、書棚において隣り合う複数のコンテナをペアとして管理運用する。これにより、一方のコンテナが認識できればもう一方のコンテナの所在が容易に認識できるようになる。すなわち、コンテナ格納をフリーロケーション管理とした場合、データが誤るとコンテナの所在を見つけ出すことは容易ではない。しかし、コンテナをユニークID[100001]、[100002]のペア、ユニークID[100003]、[100004]のペアのごとく、常にペアで扱うことにより、容易に認識が可能となる。ここで、
・コンテナのペア識別はタグに割り付けられたuID(ユニークID)により行う
・タグに書き込むロケーションデータは、「列−連−段−手前・奥」とする
・手前、奥両方にコンテナがない空きスペースを1小間分設ける
ことによって、ペアのコンテナの運用を確実にすることができる。
【0056】
以下に、ペアのコンテナの運用によって、ユニークID[100001]、[100003]の順にコンテナの搬出を行い、ユニークID[100003]、[100001]の順にコンテナの搬入を行なう場合を図9乃至図11を用いて詳細に説明する。
【0057】
本発明に係る図書自動管理システムによれば、動作前状態において、以下のような手順で処理が進められる。図9のステップS31、S32において、スタッカクレーン15が、ユニークID[100001]のコンテナ12を搬出するために,ユニークID[100002]のコンテナ12を移動する場合の手順は、以下のとおりである。
【0058】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42で読み出す
(3)スタッカクレーン15は、取出す場所に目的のコンテナがあることを確認
(4)コンテナが目的のものなら、スタッカクレーン15にコンテナ12を積んで搬送
(5)コンテナが異なるものであれば、表示パネル35等に異常と表示する
(6)スタッカクレーン15が目的地である書棚11に到着する
(7)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(8)スタッカクレーン15は、格納する場所にコンテナが存在しないことを確認
(9)格納する場所が空きなら、無線タグ41にロケーションを書き込み、スタッカクレーン15によりコンテナを格納する
(10)格納する場所に他のコンテナが存在すれば、表示パネル35等に異常と表示する
図9のステップS32において、スタッカクレーン15が、ユニークID[100001]のコンテナ12を搬出する場合の手順は、以下のとおりである。
【0059】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42で読み出す
(3)スタッカクレーン15は、取出す場所に目的のコンテナがあることを確認
このとき、手前側に無いことも確認する
(4)コンテナが目的のものなら、スタッカクレーン15にコンテナ12を積んで搬送
(5)コンテナが異なるものであれば、表示パネル35等に異常と表示する
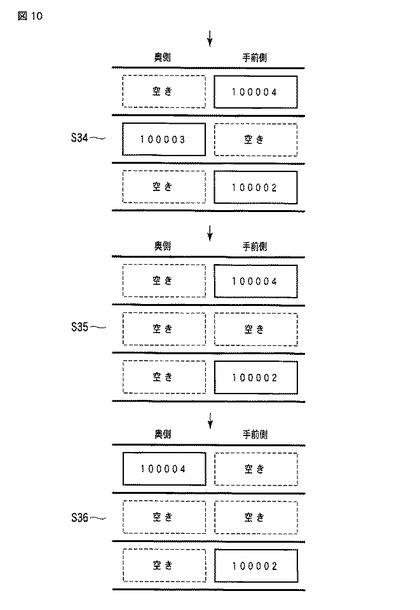
図9のステップS33、図10のステップS34において、スタッカクレーン15が、ユニークID[100003]のコンテナ12を搬出するためにユニークID[100004]のコンテナ12を移動する場合の手順は、以下のとおりである。
【0060】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(3)スタッカクレーン15は、取出す場所に目的のコンテナがあることを確認
(4)コンテナが目的のものなら、スタッカクレーン15にコンテナ12を積んで搬送
(5)コンテナが異なるものであれば、表示パネル35等に異常と表示する
(6)スタッカクレーン15が目的地である書棚11に到着する
(7)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(8)スタッカクレーン15は、格納する場所にコンテナが存在しないことを確認
(9)格納する場所が空きなら、無線タグ41にロケーションを書き込み、スタッカクレーン15によりコンテナを格納する
(10)格納する場所に他のコンテナが存在すれば、表示パネル35等に異常と表示する
図10のステップS34において、スタッカクレーン15が、ユニークID[100003]のコンテナ12を搬出する場合の手順は、以下のとおりである。
【0061】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(3)スタッカクレーン15は、取出す場所に目的のコンテナがあることを確認
このとき、手前側に無いことも確認する
(4)コンテナが目的のものなら、スタッカクレーン15にコンテナ12を積んで搬送
(5)コンテナが異なるものであれば、表示パネル35等に異常と表示する
図10のステップS35、S36において、スタッカクレーン15が、ユニークID[100004]のコンテナ12を奥に移動する場合の手順は、以下のとおりである。
【0062】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(3)スタッカクレーン15は、取出す場所に目的のコンテナがあることを確認
このとき、奥側に無いことも確認する
(4)コンテナが目的のもので奥側にコンテナが存在しなければ、スタッカクレーン15は、無線タグ41にロケーションを書き込みコンテナ12を奥に移動
(5)コンテナが異なるもの又は、奥にコンテナが存在した場合は、表示パネル35等に異常と表示する
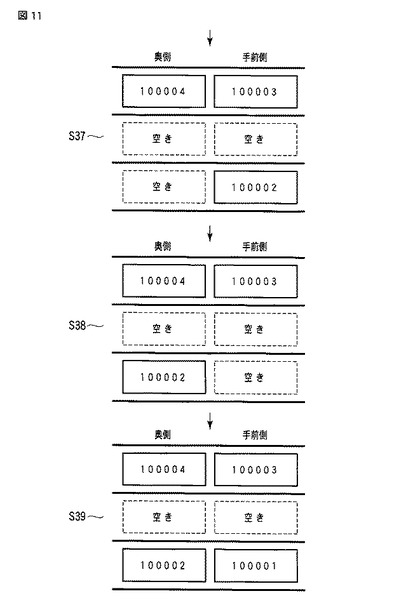
図10のステップS36、図11のステップS37において、スタッカクレーン15が、ユニークID[100003]のコンテナ12を返却する場合の手順は、以下のとおりである。
【0063】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(3)スタッカクレーン15は、返却する場所にコンテナが存在しないことと奥側にコンテナが存在することを確認
(4)奥側にコンテナが存在し返却する場所が空きなら、無線タグ41にロケーションを書き込み、スタッカクレーン15によりコンテナ12を格納する
(5)奥側にコンテナが存在しない、又は返却する場所に他のコンテナが存在する場合、表示パネル35等に異常と表示する
このユニークID[100003]の移動により、図11のステップS37に示すように、ペアのコンテナであるユニークID[100003]と[100004]がペアの状態で棚に移動されたことになる。
【0064】
図11のステップS37、S38において、スタッカクレーン15が、ユニークID[100002]のコンテナ12を奥に移動する場合の手順は、以下のとおりである。
【0065】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(3)スタッカクレーン15は、取り出す場所に目的のコンテナがあることを確認
このとき、奥側に無いことも確認する
(4)コンテナが目的のもので奥側にコンテナが存在しなければ、スタッカクレーン15は、無線タグ41にロケーションを書き込みコンテナ12を奥に移動
(5)コンテナが異なるもの又は、奥にコンテナが存在した場合は、表示パネル35等に異常と表示する
図11のステップS38、S39において、スタッカクレーン15が、ユニークID[100001]のコンテナ12を返却する場合の手順は、以下のとおりである。
【0066】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(3)スタッカクレーン15は、返却する場所にコンテナが存在しないことと奥側にコンテナが存在することを確認
(4)奥側にコンテナが存在し返却する場所が空きなら、無線タグ41にロケーションを書き込み、スタッカクレーン15によりコンテナ12を格納する
(5)奥側にコンテナが存在しない、又は返却する場所に他のコンテナが存在する場合は、表示パネル35等に異常を表示する
このユニークID[100001]の移動により、図11のステップS39に示すように、ペアのコンテナであるユニークID[100001]と[100002]がペアの状態で棚に移動されたことになる。すなわち、ペア関係を崩さずに、ユニークID[100001]、[100003]の順にコンテナの搬出を行い、ユニークID[100003]、[100001]の順にコンテナの搬入を行なうことができる。
【0067】
以上、本発明に係る図書保管管理装置及び図書保管管理方法によれば、システム的にはフリーロケーション管理でありながら、ロケーション管理がスタンドアロンで可能となるシステムを提供することができる。
【0068】
また、この発明は上記した実施の形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を種々変形して具体化することができる。また、上記した実施の形態に開示されている複数の構成要素を適宜に組み合わせることにより、種々の発明を形成することができる。例えば、実施の形態に示される全構成要素から幾つかの構成要素を削除しても良いものである。さらに、異なる実施の形態に係る構成要素を適宜組み合わせても良いものである。
【符号の説明】
【0069】
11…書棚、12…コンテナ、13,13a,13b.13c…図書、14…レール、15…スタッカクレーン、16…出庫用ラックステーション、17…搬送コンベア、18…コンテナ搬出口、19…2階向コンテナ搬入口、20…1階向コンテナ搬入口、21…搬送コンベア、22…2階ステーション、23…搬送コンベア、24,25…1階ステーション、26…搬送コンベア、27…1階向コンテナ搬出口、28…搬送コンベア、29…2階向コンテナ搬出口、30…コンテナ搬入口、31…搬送コンベア、32…入庫用ラックステーション、33…無線タグ、33a…発振回路、33b…CPU、33c…EEPROM、33d…RF回路、33e…共振コイル、34…カウンター台、34a…開口部、35…表示装置、37a…無線タグリーダ/ライタ、38…シャッタ、40、41…アンテナコイル、42〜44…RF回路、45…通信制御回路、45a…通信記憶部、46…管理コンピュータ、47…バスライン、48…無停電電源装置、49…ファイルアダプタ、51…ハードディスク、53…ファイルアダプタ、54…ハードディスク、55…ファイルアダプタ、56…ハードディスク、57…シリアルインターフェースアダプタ、58…統括制御盤、58a…入出力回路、58b…制御回路、58c…入出力回路、58d…通信記憶部、59…垂直搬送機、60…シリアルインターフェースアダプタ、64…プリンタ、65…バーコードリーダ、66…シリアルインターフェースアダプタ、70…プリンタ、71…バーコードリーダ、72a〜72d…制御回路、73a〜73d…駆動回路、74a〜74d…検出器。
【技術分野】
【0001】
この発明は、コンテナに取り付けられた無線タグ等の記憶媒体に格納した位置情報により書棚へのコンテナの格納場所を管理する図書保管管理装置及び方法に関する。
【背景技術】
【0002】
周知のように、近年、多量の蔵書を有する大規模図書館等にあっては、図書の収容効率の高い閉架書庫方式が採用される傾向にある。そして、このような閉架書庫に対する図書の取り出しや返却に要する作業の能率向上を図るために、自動入出庫システムが導入されてきている。
【0003】
この自動入出庫システムは、貸し出しが要求された図書を書庫から取り出してカウンターまで搬送し、その図書に対する貸し出し登録を行なう作業や、返却された図書に対する貸し出し登録を削除し、その図書を書庫まで戻して収容位置を記録する作業等を自動化して、閉架書庫に対する図書の取り出し及び返却作業を、正確かつ迅速に実行することができるようにしたものである。
【0004】
すなわち、この種の自動入出庫システムにおいては、保管されている多量の図書の管理を容易にするために、各図書それぞれにバーコードや無線タグ等を付している。また、各図書は、複数冊毎にコンテナに収容されており、書庫に対してコンテナ単位で入出庫されるようになされている。
【0005】
そして、図書の取り出し(貸し出し)が要求された場合には、その図書の収容されたコンテナが書庫から自動出庫されてステーションまで搬送され、図書館員は、ステーションに搬送されてきたコンテナの中から要求された図書を取り出して、図書に貼付されたバーコードラベル又は、RFIDタグ等を読み取り、利用者に渡し、ここに、図書の貸し出しが行なわれる。
【0006】
また、図書の返却が要求された場合には、その返却図書を収容すべきコンテナが書庫から自動出庫されステーションに取り出される。図書館員は、図書に貼付されたバーコードラベル又は、RFIDタグ等を読み取り、ステーションに取り出されたコンテナに返却された図書を収容させた後にそのコンテナを書庫に入庫させ、ここに、図書の返却が行なわれる。
【0007】
このような自動入出庫システムを備えた図書保管管理装置において、特に肝要なことは書庫へコンテナを搬入する際に、そのコンテナの搬入先に既に他のコンテナが収容されているか否かを正確に判別して、二重入庫のような事故の発生を未然に防止するための対策を施すことである。
【0008】
特許文献1は、荷検知センサを設けることで、格納場所に荷が存在するかどうかを判断する技術を開示している。
【0009】
特許文献2も、荷物を検知するための光学センサを用意し、センサからの信号により、荷物が存在するかどうかを判断する技術を開示している。
【0010】
特許文献3も、荷検知センサや測距センサを使用して、荷物が存在するかどうかを判断する技術を開示している。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2007−276897号公報
【特許文献2】特開2005−306499号公報
【特許文献3】特開2007−055720号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献1乃至3においては、棚にコンテナや荷物が存在するかどうかを判断するための光学センサや測距センサを用いているが、感度調整や角度調整に時間がかかってしまう。また、スタッカクレーンの停止位置のズレやコンテナの汚れ具合等による誤認識により、荷同士の衝突という重大事故に繋がるケースも発生する。
【0013】
本発明は、誤認識のない容易なコンテナ確認を行なうことができる図書保管管理装置及び図書保管管理方法を提供することを目的とする。
【課題を解決するための手段】
【0014】
課題を解決するための一実施形態は、
書棚に収容されるコンテナと、
前記コンテナに付着され、前記コンテナの識別情報と前記書棚における前記コンテナが収容される位置情報を格納する記憶素子と、
前記コンテナを前記書棚に搬入する、または、前記書棚から前記コンテナを搬出する搬送手段と、
前記搬送手段に設けられ、前記コンテナに付着された記憶素子が格納する情報を読み取り、または、前記記憶素子に情報を書き込む読取書込部と、
前記読取書込部により前記記憶素子に対して前記位置情報を書込み、または、前記識別情報および前記位置情報を読み出すことにより前記コンテナを管理し、前記コンテナを前記書棚に搬入、または、搬出するべく前記搬送手段を制御する制御部と、
を具備することを特徴とする図書保管管理装置である。
【0015】
また、課題を解決するための他の一実施形態は、
書棚に収容されるコンテナと、前記コンテナに付着され、前記コンテナの識別情報と前記書棚における前記コンテナが収容される位置情報を格納する記憶素子に対し、
前記識別情報を書込み、または、前記識別情報および前記位置情報を読み出すことにより前記コンテナを管理して、前記コンテナを前記書棚に搬入し、または、搬出する図書保管管理方法である。
【発明の効果】
【0016】
コンテナの識別情報とロケーション情報(位置情報)を記憶させる無線タグをコンテナに取り付けて、コンテナ搬入、搬出の際に、この無線タグの位置情報を書き込み、識別情報、位置情報を読み出すことにより、コンテナの存在や棚における位置を容易かつ確実に認識することで、例えばコンテナ同士の衝突を未然に回避することができる。
【図面の簡単な説明】
【0017】
【図1】この発明の実施の形態を示すもので、図書自動管理システムの全体的な構成を説明するために示す斜視図。
【図2】同実施の形態におけるコンテナとこのコンテナに取り付けられる無線タグとの関係を説明するために示す斜視図。
【図3】同実施の形態における2階ステーションの詳細な構成を説明するために示す斜視図。
【図4】同実施の形態における図書自動管理システムの統括制御盤の詳細を説明するために示すブロック構成図。
【図5】同実施の形態における図書自動管理システムのゲート状のタグリーダ/ライタと周辺回路を示す説明図。
【図6】同実施の形態における図書自動管理システムの書棚群の一例を示す説明図。
【図7】同実施の形態における図書自動管理システムのコンテナ搬出の動作の一例を説明するために示すフローチャート。
【図8】同実施の形態における図書自動管理システムのコンテナ搬入の動作の一例を説明するために示すフローチャート。
【図9】同実施の形態における図書自動管理システムにおいてトレイをペア単位で搬出する一例を示す説明図。
【図10】同実施の形態における図書自動管理システムにおいてトレイをペア単位で搬入する一例を示す説明図。
【図11】同実施の形態における図書自動管理システムにおいてトレイをペア単位で搬入する一例を示す説明図。
【発明を実施するための形態】
【0018】
以下、この発明の実施の形態について図面を参照して詳細に説明する。図1は、この実施の形態で説明する図書自動管理システムの全体的な構成を示している。すなわち、図1において、符号11は書棚である。
【0019】
この書棚11は、例えば図書館の3階の書棚内に設置されている。この書棚11には、複数のコンテナ12が収容されている。これらコンテナ12には、詳細は後述するが、それぞれ、複数の図書13を収容している。
【0020】
上記書棚11の前面には、レール14に案内されて走行可能なスタッカクレーン15が設置されている。このスタッカクレーン15は、図書13の出庫時に、書棚11から所望のコンテナ12を取り出して出庫用ラックステーション16に搬送する。
【0021】
この出庫用ラックステーション16に搬送されたコンテナ12は、搬送コンベア17を介してコンテナ搬出口18に搬送された後、図示しない垂直搬送機を介して、2階向コンテナ搬入口19または1階向コンテナ搬入口20に選択的に搬送される。
【0022】
そして、2階向コンテナ搬入口19に搬送されたコンテナ12は、搬送コンベア21を介して、カウンターである2階のステーション22のコンテナ受入部22aに搬送される。また、1階向コンテナ搬入口20に搬送されたコンテナ12は、搬送コンベア23を介して、カウンターである1階ステーション24または25のコンテナ受入部24a,25aに搬送される。
【0023】
一方、1階ステーション24または25のコンテナ受入部24a,25aにあるコンテナ12は、コンテナ排出部24b,25bに移送され、搬送コンベア26を介して、1階向コンテナ搬出口27に搬送される。
【0024】
また、2階のステーション22のコンテナ受入部22aにあるコンテナ12は、コンテナ排出部22bに移送され、搬送コンベア28を介して、2階向コンテナ搬出口29に搬送される。
【0025】
このように、1階向コンテナ搬出口27または2階向コンテナ搬出口29に搬送されたコンテナ12は、図示しない垂直搬送機を介して、3階のコンテナ搬入口30に搬送される。このコンテナ搬入口30に搬送されたコンテナ12は、搬送コンベア31を介して、入庫用ラックステーション32に搬送された後、スタッカクレーン15により書棚11に入庫される。
【0026】
ここで、上記コンテナ12には、図2に示すように、複数の図書13が、その背表紙を同一方向に向けた状態で、厚み方向に1列に並んで収容されるようになっている。また、各図書13には、無線タグ33がそれぞれ付着されている。これら無線タグ33には、バーコードも記載されている。
【0027】
すなわち、無線タグ33には、図書13毎に固有の図書コードが予め書き込まれている。そして、この無線タグ33の表面に、バーコードリーダ65等で読み取り可能なバーコードが印字されたラベルが貼付されている。
【0028】
また、各コンテナ12にも、それぞれ固有の識別コードである無線タグ41が付されており、コンテナ12の識別コードと、そのコンテナ12の書棚11内における位置情報と、そのコンテナ12に収容されている全ての図書13の図書コードが対応付けられ、図書情報として管理されている。
【0029】
2階のステーション22または1階ステーション24,25等において、コンテナ12に対して図書13の取り出しや返却が行なわれる際には、コンテナ12から取り出された図書13やコンテナ12に入庫する図書13の無線タグ33(またはバーコード)から図書コードが読み取られて、元の図書情報が更新されるようになっている。
【0030】
ただし、このバーコードラベルは、図書13の無線タグ33とは別の箇所(図書13を開かないで見える位置)に貼付されていてもよい。この場合、無線タグ33の付される位置は、図書13のどこでもよいことになる。
【0031】
これら記憶素子である無線タグ33に記憶されている図書コード、または、無線タグ33の表面または図書13上に設けられた記憶素子であるバーコードラベルに記載されている図書コードは、後述するステーションに設置されるバーコードリーダ65等またはカウンター台34上の平置きアンテナをもつ無線タグリーダ/ライタ37により検出されるものである。
【0032】
次に、図3は、上記2階のステーション22の詳細を示している。なお、1階ステーション24,25については、2階のステーション22と同様な構成であるため、その説明を省略する。すなわち、この2階のステーション22には、カウンター台34が設置されている。
【0033】
このカウンター台34の裏側には、前記コンテナ受入部22aとコンテナ排出部22bとが配置されている。そして、搬送コンベア21を介して2階のステーション22に搬送されてきたコンテナ12は、コンテナ受入部22aで受け入れられた後、コンテナ排出部22bに移送されて保持される。
【0034】
また、上記カウンター台34には、コンテナ排出部22bに対応する部分に開口部34aが形成されている。そして、図書館員は、この開口部34aを介することにより、コンテナ排出部22bに保持されたコンテナ12に対して、図書13の取り出しや返却を行なうことができる。
【0035】
この場合、カウンター台34の開口部34aからは、コンテナ12内に厚み方向に1列になって収容されている図書13の背表示が露出されることになる。そして、このコンテナ排出部22bに保持されたコンテナ12は、搬送コンベア28を介して2階向コンテナ搬出口29に搬送される。
【0036】
さらに、上記カウンター台34上には、図書館員が図書13の貸し出しまたは返却に関する種々の操作を行なうとともに、操作案内や必要な表示を行なうための入力タッチパネル式の表示パネル35と、図書に貼付されたバーコードラベルを読み取るバーコードリーダ65等および無線タグ33の図書コードを読み取る無線タグリーダ/ライタ37が設置されている。
【0037】
次に、図4は、上記のような図書自動管理システムに使用される制御系を示している。すなわち、図4において、符号46は管理コンピュータである。この管理コンピュータ46は、図示しないCPU等の制御部を有している。管理コンピュータ46は、バスライン47を介して無停電電源装置48が接続されている。
【0038】
また、この管理コンピュータ46には、バスライン47からファイルアダプタ49を経て、システムの制御プログラムが記憶されたハードディスク51が接続されている。
【0039】
さらに、この管理コンピュータ46には、バスライン47からファイルアダプタ53を経て、上記した図書情報の記憶されたハードディスク54が接続されている。また、この管理コンピュータ46には、バスライン47からファイルアダプタ55を経て、バックアップ情報の記憶されたハードディスク56が接続される。
【0040】
一方、上記管理コンピュータ46には、バスライン47からシリアルインターフェースアダプタ57を経て、統括制御盤58が接続されている。この統括制御盤58は、スタッカクレーン15、2階のステーション22及び1階ステーション24,25、搬送コンベア17,21,23,26,28,31、垂直搬送機59等の動作を統括的に管理している。
【0041】
また、スタッカクレーン15には、コンテナ12に貼付された無線タグ41に対しデータの書き込みおよび読み出しを行なうタグリーダ/ライタ42が接続されている。
【0042】
また、上記管理コンピュータ46には、バスライン47からシリアルインターフェースアダプタ60を経て、表示パネル35、カウンター台に平置きされた無線タグリーダ/ライタ37、利用者に図書13の貸出票を発行するためのプリンタ64及びバーコードリーダ65が接続されている。
【0043】
そして、これら表示パネル35、カウンター台に平置きされた無線タグリーダ/ライタ37、プリンタ64及びバーコードリーダ65等は、2階のステーション22に設置されている。
【0044】
さらに、上記管理コンピュータ46には、バスライン47からシリアルインターフェースアダプタ66を経て、表示パネル35、カウンター台に平置きされた無線タグリーダ/ライタ37、プリンタ70及びバーコードリーダ71が接続されている。そして、これら表示パネル35、カウンター台に平置きされた無線タグリーダ/ライタ37、プリンタ70及びバーコードリーダ71等は、1階ステーション24,25にそれぞれ設置されている。
【0045】
ここで、図5は、上記統括制御盤58の詳細を示している。すなわち、上記バスライン47は、シリアルインターフェースアダプタ57を経た後、入出力回路58aを介して制御回路58bに接続される。この制御回路58bは、入出力回路58cを介して、各制御対象であるスタッカクレーン15、2階のステーション22及び1階ステーション24,25、搬送コンベア17,21,23,26,28,31、垂直搬送機59をそれぞれ統括的に管理している。また、上記入出力回路58aには、通信記憶部58dが接続されている。
【0046】
そして、上記スタッカクレーン15、2階のステーション22及び1階ステーション24,25、搬送コンベア17,21,23,26,28,31、垂直搬送機59等の制御対象は、それぞれ、入出力回路58cからの制御信号を受ける制御回路72a〜72dと、この制御回路72a〜72dの制御に基づいて制御対象を駆動させる駆動回路73a〜73dと、制御対象の位置等を検出するための検出器74a〜74dとを有している。
【0047】
また、図6は、書棚11とスタッカクレーン15との関係の一例を示している。この例では、書棚11がスタッカクレーン15からみて手前側と奥側とにそれぞれコンテナ12を収容することができるようになっている。そして、スタッカクレーン15は、管理コンピュータ46および統括制御盤58の制御により、書棚11の任意のロケーションにコンテナを移動することができる。
【0048】
(コンテナの搬出と搬入)
上記のような構成となされた図書自動管理システムにおいて、以下、その特徴的なコンテナ排出およびコンテナ搬入処理について、図7および図8のフローチャートと、図9乃至図11の説明図を参照して説明する。すなわち、図書自動管理システムにおいて、コンテナ12は、書棚11から搬出処理され、また、書棚11へと搬入処理がなされる。初めに、一般的なコンテナ搬出およびコンテナ搬入について、フローチャートを用いて説明する。
【0049】
・コンテナ搬入
初めに、コンテナ搬入処理を図7のフローチャートを用いて説明する。スタッカクレーン15は、ステーションにおいて、搬入すべきコンテナ12をスタッカクレーン15の荷台上に積み込み、荷台上のタグリーダ/ライタ42を用いて荷台上に積み込まれたコンテナ12の無線タグ41のユニークIDを読み取り、管理コンピュータ46に通知する。管理コンピュータ46は、ユニークIDに対応するロケーションを予め与えられたデータ等から決定し(ステップS11)、スタッカクレーン15にロケーションを通知する。スタッカクレーン15は上記のロケーションに移動する(ステップS12)。スタッカクレーン15は、リーダ/ライタ42で情報を読み取り、積み込まれたコンテナ12のユニークID以外で、読み取りができたロケーションデータが移動の目標のロケーションデータと一致するかどうかを判断する(ステップS13)。スタッカクレーン15は、リーダ/ライタ42で無線タグ41を読んだ結果、積み込まれたコンテナ12のユニークID以外で、読み取りができたロケーションデータが移動の目標のロケーションデータと一致したと判断した場合は、目標のロケーションに別のコンテナが存在することを管理コンピュータ46に通知し、表示パネル35等に表示することでユーザ等に通知する(ステップS14)。また、スタッカクレーン15は、読み取りができたロケーションデータが、積み込まれたコンテナ12のユニークID以外で、移動の目標のロケーションデータと一致しなかったと判断した場合は、コンテナ12を目標の書棚11のロケーションに搬入する(ステップS15)。このとき、スタッカクレーン15は、スタッカクレーン15に付加したタグリーダ/ライタ42で無線タグ41の位置情報を現在の位置に書き換える。
【0050】
・コンテナ搬出
次に、コンテナ搬出処理を図8のフローチャートを用いて説明する。管理コンピュータ46は、コンテナ搬出のために、コンテナ12のu(ユニーク)IDと搬出先である書棚11のロケーションを決定する(ステップS21)。次に、管理コンピュータ46は、統括制御盤58を介し、スタッカクレーン15の制御によってコンテナ12を与えられたロケーションに移動させる(ステップS22)。スタッカクレーン15は、スタッカクレーン15に付加したタグリーダ/ライタ42で無線タグ41の情報を読み出し、目的のロケーションとコンテナのuIDが検出できたかどうかを判断する(ステップS23)。スタッカクレーン15が目的のロケーションとコンテナのuIDを検出しなければ、スタッカクレーン15は、管理コンピュータ46に通知し、表示パネル35等に表示することでユーザに通知する(ステップS24)。スタッカクレーン15が目的のロケーションとコンテナのuIDを検出した場合は、スタッカクレーン15は、目標のコンテナ12を書棚11のロケーションから搬出する(ステップS25)。
【0051】
このように、本発明に係る図書自動管理システムによれば、コンテナ12の搬入、搬出において、コンテナ12に取り付けた無線タグ41の位置情報の読み取り・書き換えにより管理するものである。これにより、コンテナの存在や棚における位置を容易かつ確実に認識することができる。従って、管理機を使用しないオフライン又は手動操作を行ったとしても、データ管理上の誤操作が防止できる。これにより、管理コンピュータがダウンした場合の運用や、管理コンピュータのメンテナンス等を容易に行なえるようになる。すなわち、コンテナ自身がロケーションデータを持っているため、管理コンピュータと実際のコンテナ12の位置との不整合を防止することができる。
【0052】
また、書棚11にコンテナ12を格納する時、その場所に他のコンテナ12が既に格納されているか否かを確認することにより、二重にコンテナを書棚11に格納することがなくなるため、コンテナ同士の衝突を防止することができる。
【0053】
また、従来、書棚にコンテナがあるか否かを光電センサで行っているが、感度調整や角度調整等の調整に時間が掛かっていた。更に、スタッカクレーンの停止位置のズレやコンテナの汚れ具合等による誤認識により、衝突という重大事故に繋がったケースも発生していた。しかし、本発明に係る図書自動管理システムによれば、無線によりデータを読み出して確認するため、調整も容易であり、誤認識の発生もない。
【0054】
また、後述するWコンテナ運用においては、格納位置の確認のみならずペアであるか否かの確認も行なえるため、より正確な保管管理が可能となる。
【0055】
(具体的なコンテナの搬送例)
次に、図9乃至図11の例を用いて、具体的なコンテナの搬送例を説明する。
ここで、一例として、図9に示すように、書棚において隣り合う複数のコンテナをペアとして管理運用する。これにより、一方のコンテナが認識できればもう一方のコンテナの所在が容易に認識できるようになる。すなわち、コンテナ格納をフリーロケーション管理とした場合、データが誤るとコンテナの所在を見つけ出すことは容易ではない。しかし、コンテナをユニークID[100001]、[100002]のペア、ユニークID[100003]、[100004]のペアのごとく、常にペアで扱うことにより、容易に認識が可能となる。ここで、
・コンテナのペア識別はタグに割り付けられたuID(ユニークID)により行う
・タグに書き込むロケーションデータは、「列−連−段−手前・奥」とする
・手前、奥両方にコンテナがない空きスペースを1小間分設ける
ことによって、ペアのコンテナの運用を確実にすることができる。
【0056】
以下に、ペアのコンテナの運用によって、ユニークID[100001]、[100003]の順にコンテナの搬出を行い、ユニークID[100003]、[100001]の順にコンテナの搬入を行なう場合を図9乃至図11を用いて詳細に説明する。
【0057】
本発明に係る図書自動管理システムによれば、動作前状態において、以下のような手順で処理が進められる。図9のステップS31、S32において、スタッカクレーン15が、ユニークID[100001]のコンテナ12を搬出するために,ユニークID[100002]のコンテナ12を移動する場合の手順は、以下のとおりである。
【0058】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42で読み出す
(3)スタッカクレーン15は、取出す場所に目的のコンテナがあることを確認
(4)コンテナが目的のものなら、スタッカクレーン15にコンテナ12を積んで搬送
(5)コンテナが異なるものであれば、表示パネル35等に異常と表示する
(6)スタッカクレーン15が目的地である書棚11に到着する
(7)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(8)スタッカクレーン15は、格納する場所にコンテナが存在しないことを確認
(9)格納する場所が空きなら、無線タグ41にロケーションを書き込み、スタッカクレーン15によりコンテナを格納する
(10)格納する場所に他のコンテナが存在すれば、表示パネル35等に異常と表示する
図9のステップS32において、スタッカクレーン15が、ユニークID[100001]のコンテナ12を搬出する場合の手順は、以下のとおりである。
【0059】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42で読み出す
(3)スタッカクレーン15は、取出す場所に目的のコンテナがあることを確認
このとき、手前側に無いことも確認する
(4)コンテナが目的のものなら、スタッカクレーン15にコンテナ12を積んで搬送
(5)コンテナが異なるものであれば、表示パネル35等に異常と表示する
図9のステップS33、図10のステップS34において、スタッカクレーン15が、ユニークID[100003]のコンテナ12を搬出するためにユニークID[100004]のコンテナ12を移動する場合の手順は、以下のとおりである。
【0060】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(3)スタッカクレーン15は、取出す場所に目的のコンテナがあることを確認
(4)コンテナが目的のものなら、スタッカクレーン15にコンテナ12を積んで搬送
(5)コンテナが異なるものであれば、表示パネル35等に異常と表示する
(6)スタッカクレーン15が目的地である書棚11に到着する
(7)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(8)スタッカクレーン15は、格納する場所にコンテナが存在しないことを確認
(9)格納する場所が空きなら、無線タグ41にロケーションを書き込み、スタッカクレーン15によりコンテナを格納する
(10)格納する場所に他のコンテナが存在すれば、表示パネル35等に異常と表示する
図10のステップS34において、スタッカクレーン15が、ユニークID[100003]のコンテナ12を搬出する場合の手順は、以下のとおりである。
【0061】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(3)スタッカクレーン15は、取出す場所に目的のコンテナがあることを確認
このとき、手前側に無いことも確認する
(4)コンテナが目的のものなら、スタッカクレーン15にコンテナ12を積んで搬送
(5)コンテナが異なるものであれば、表示パネル35等に異常と表示する
図10のステップS35、S36において、スタッカクレーン15が、ユニークID[100004]のコンテナ12を奥に移動する場合の手順は、以下のとおりである。
【0062】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(3)スタッカクレーン15は、取出す場所に目的のコンテナがあることを確認
このとき、奥側に無いことも確認する
(4)コンテナが目的のもので奥側にコンテナが存在しなければ、スタッカクレーン15は、無線タグ41にロケーションを書き込みコンテナ12を奥に移動
(5)コンテナが異なるもの又は、奥にコンテナが存在した場合は、表示パネル35等に異常と表示する
図10のステップS36、図11のステップS37において、スタッカクレーン15が、ユニークID[100003]のコンテナ12を返却する場合の手順は、以下のとおりである。
【0063】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(3)スタッカクレーン15は、返却する場所にコンテナが存在しないことと奥側にコンテナが存在することを確認
(4)奥側にコンテナが存在し返却する場所が空きなら、無線タグ41にロケーションを書き込み、スタッカクレーン15によりコンテナ12を格納する
(5)奥側にコンテナが存在しない、又は返却する場所に他のコンテナが存在する場合、表示パネル35等に異常と表示する
このユニークID[100003]の移動により、図11のステップS37に示すように、ペアのコンテナであるユニークID[100003]と[100004]がペアの状態で棚に移動されたことになる。
【0064】
図11のステップS37、S38において、スタッカクレーン15が、ユニークID[100002]のコンテナ12を奥に移動する場合の手順は、以下のとおりである。
【0065】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(3)スタッカクレーン15は、取り出す場所に目的のコンテナがあることを確認
このとき、奥側に無いことも確認する
(4)コンテナが目的のもので奥側にコンテナが存在しなければ、スタッカクレーン15は、無線タグ41にロケーションを書き込みコンテナ12を奥に移動
(5)コンテナが異なるもの又は、奥にコンテナが存在した場合は、表示パネル35等に異常と表示する
図11のステップS38、S39において、スタッカクレーン15が、ユニークID[100001]のコンテナ12を返却する場合の手順は、以下のとおりである。
【0066】
(1)スタッカクレーン15が目的地である書棚11に到着する
(2)ユニークIDとロケーションデータをタグリーダ/ライタ42により読み出す
(3)スタッカクレーン15は、返却する場所にコンテナが存在しないことと奥側にコンテナが存在することを確認
(4)奥側にコンテナが存在し返却する場所が空きなら、無線タグ41にロケーションを書き込み、スタッカクレーン15によりコンテナ12を格納する
(5)奥側にコンテナが存在しない、又は返却する場所に他のコンテナが存在する場合は、表示パネル35等に異常を表示する
このユニークID[100001]の移動により、図11のステップS39に示すように、ペアのコンテナであるユニークID[100001]と[100002]がペアの状態で棚に移動されたことになる。すなわち、ペア関係を崩さずに、ユニークID[100001]、[100003]の順にコンテナの搬出を行い、ユニークID[100003]、[100001]の順にコンテナの搬入を行なうことができる。
【0067】
以上、本発明に係る図書保管管理装置及び図書保管管理方法によれば、システム的にはフリーロケーション管理でありながら、ロケーション管理がスタンドアロンで可能となるシステムを提供することができる。
【0068】
また、この発明は上記した実施の形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を種々変形して具体化することができる。また、上記した実施の形態に開示されている複数の構成要素を適宜に組み合わせることにより、種々の発明を形成することができる。例えば、実施の形態に示される全構成要素から幾つかの構成要素を削除しても良いものである。さらに、異なる実施の形態に係る構成要素を適宜組み合わせても良いものである。
【符号の説明】
【0069】
11…書棚、12…コンテナ、13,13a,13b.13c…図書、14…レール、15…スタッカクレーン、16…出庫用ラックステーション、17…搬送コンベア、18…コンテナ搬出口、19…2階向コンテナ搬入口、20…1階向コンテナ搬入口、21…搬送コンベア、22…2階ステーション、23…搬送コンベア、24,25…1階ステーション、26…搬送コンベア、27…1階向コンテナ搬出口、28…搬送コンベア、29…2階向コンテナ搬出口、30…コンテナ搬入口、31…搬送コンベア、32…入庫用ラックステーション、33…無線タグ、33a…発振回路、33b…CPU、33c…EEPROM、33d…RF回路、33e…共振コイル、34…カウンター台、34a…開口部、35…表示装置、37a…無線タグリーダ/ライタ、38…シャッタ、40、41…アンテナコイル、42〜44…RF回路、45…通信制御回路、45a…通信記憶部、46…管理コンピュータ、47…バスライン、48…無停電電源装置、49…ファイルアダプタ、51…ハードディスク、53…ファイルアダプタ、54…ハードディスク、55…ファイルアダプタ、56…ハードディスク、57…シリアルインターフェースアダプタ、58…統括制御盤、58a…入出力回路、58b…制御回路、58c…入出力回路、58d…通信記憶部、59…垂直搬送機、60…シリアルインターフェースアダプタ、64…プリンタ、65…バーコードリーダ、66…シリアルインターフェースアダプタ、70…プリンタ、71…バーコードリーダ、72a〜72d…制御回路、73a〜73d…駆動回路、74a〜74d…検出器。
【特許請求の範囲】
【請求項1】
書棚に収容されるコンテナと、
前記コンテナに付着され、前記コンテナの識別情報と前記書棚における前記コンテナが収容される位置情報を格納する記憶素子と、
前記コンテナを前記書棚に搬入する、または、前記書棚から前記コンテナを搬出する搬送手段と、
前記搬送手段に設けられ、前記コンテナに付着された記憶素子が格納する情報を読み取り、または、前記記憶素子に情報を書き込む読取書込部と、
前記読取書込部により前記記憶素子に対して前記位置情報を書込み、または、前記識別情報および前記位置情報を読み出すことにより前記コンテナを管理し、前記コンテナを前記書棚に搬入、または、搬出するべく前記搬送手段を制御する制御部と、
を具備することを特徴とする図書保管管理装置。
【請求項2】
前記制御部は、前記コンテナの識別情報により前記書棚における前記位置情報を伴った前記書棚への前記コンテナの搬入命令を受けると、前記搬送手段により前記コンテナを前記書棚における前記位置情報が示す位置まで搬送し、前記読取書込部により前記記憶素子の前記識別情報および前記位置情報が読み取れないことによって前記書棚における前記位置情報が示す位置に他のコンテナの記憶素子が存在しないことを認識した後に、前記コンテナを前記書棚における前記位置情報が示す位置に搬入するべく前記搬送手段を制御することを特徴とする請求項1記載の図書保管管理装置。
【請求項3】
前記制御部は、前記書棚における前記位置情報と前記コンテナの識別情報とを伴った前記書棚からの前記コンテナの搬出命令を受けると、前記搬送手段により前記コンテナを前記書棚から搬出するべく前記位置情報が示す位置まで移動し、
前記読取書込部で前記コンテナの識別情報および前記位置情報を読み取ることによって前記書棚における前記位置情報が示す位置に前記搬出すべきコンテナの記憶素子が存在することを認識した後に、前記コンテナを前記書棚における前記位置情報が示す位置から搬出するべく前記搬送手段を制御することを特徴とする請求項1記載の図書保管管理装置。
【請求項4】
前記制御部は、前記コンテナの搬入命令を受けて前記コンテナを前記書棚における前記位置情報が示す位置に搬入した際に、前記読取書込部により前記コンテナの前記記憶素子に前記書棚における前記コンテナの収容される位置情報を書き込むことを特徴とする請求項1記載の図書保管管理装置。
【請求項5】
前記制御部は、前記コンテナを複数用意してこれをペアとし、このペアのコンテナを前記コンテナが収容される位置情報の一つに対応付け、その後、前記書棚において、このペアのコンテナを常に隣り合うように搬入することを特徴とする請求項1記載の図書保管管理装置。
【請求項6】
前記記憶素子に格納される位置情報は、前記書棚における、列、連、段、手前・奥に関する情報であることを特徴とする請求項1記載の図書保管管理装置。
【請求項7】
書棚に収容されるコンテナと、前記コンテナに付着され、前記コンテナの識別情報と前記書棚における前記コンテナが収容される位置情報を格納する記憶素子に対し、
前記位置情報を書込み、または、前記識別情報および前記位置情報を読み出すことにより前記コンテナを管理して、前記コンテナを前記書棚に搬入し、または、搬出する図書保管管理方法。
【請求項8】
前記管理方法は、前記コンテナの識別情報より前記書棚における前記位置情報を伴った前記書棚への前記コンテナの搬入命令を受けると、前記コンテナを前記書棚における前記位置情報が示す位置まで搬送し、前記記憶素子の前記識別情報および前記位置情報が読み取れないことによって前記書棚における前記位置情報が示す位置に他のコンテナの記憶素子が存在しないことを認識した後に、前記コンテナを前記書棚における前記位置情報が示す位置に搬入することを特徴とする請求項7記載の図書保管管理方法。
【請求項9】
前記管理方法は、前記書棚における前記位置情報と前記コンテナの識別情報とを伴った前記書棚からの前記コンテナの搬出命令を受けると、前記コンテナを前記書棚から搬出するべく前記位置情報が示す位置まで移動し、
前記コンテナの識別情報および前記位置情報を読み取ることによって前記書棚における前記位置情報が示す位置に前記搬出すべきコンテナの記憶素子が存在することを認識した後に、前記コンテナを前記書棚における前記位置情報が示す位置から搬出することを特徴とする請求項7記載の図書保管管理方法。
【請求項10】
前記管理方法は、前記コンテナを複数用意してこれをペアとし、このペアのコンテナを前記コンテナが収容される位置情報の一つに対応付け、その後、前記書棚において、このペアのコンテナを常に隣り合うように搬入することを特徴とする請求項7記載の図書保管管理方法。
【請求項1】
書棚に収容されるコンテナと、
前記コンテナに付着され、前記コンテナの識別情報と前記書棚における前記コンテナが収容される位置情報を格納する記憶素子と、
前記コンテナを前記書棚に搬入する、または、前記書棚から前記コンテナを搬出する搬送手段と、
前記搬送手段に設けられ、前記コンテナに付着された記憶素子が格納する情報を読み取り、または、前記記憶素子に情報を書き込む読取書込部と、
前記読取書込部により前記記憶素子に対して前記位置情報を書込み、または、前記識別情報および前記位置情報を読み出すことにより前記コンテナを管理し、前記コンテナを前記書棚に搬入、または、搬出するべく前記搬送手段を制御する制御部と、
を具備することを特徴とする図書保管管理装置。
【請求項2】
前記制御部は、前記コンテナの識別情報により前記書棚における前記位置情報を伴った前記書棚への前記コンテナの搬入命令を受けると、前記搬送手段により前記コンテナを前記書棚における前記位置情報が示す位置まで搬送し、前記読取書込部により前記記憶素子の前記識別情報および前記位置情報が読み取れないことによって前記書棚における前記位置情報が示す位置に他のコンテナの記憶素子が存在しないことを認識した後に、前記コンテナを前記書棚における前記位置情報が示す位置に搬入するべく前記搬送手段を制御することを特徴とする請求項1記載の図書保管管理装置。
【請求項3】
前記制御部は、前記書棚における前記位置情報と前記コンテナの識別情報とを伴った前記書棚からの前記コンテナの搬出命令を受けると、前記搬送手段により前記コンテナを前記書棚から搬出するべく前記位置情報が示す位置まで移動し、
前記読取書込部で前記コンテナの識別情報および前記位置情報を読み取ることによって前記書棚における前記位置情報が示す位置に前記搬出すべきコンテナの記憶素子が存在することを認識した後に、前記コンテナを前記書棚における前記位置情報が示す位置から搬出するべく前記搬送手段を制御することを特徴とする請求項1記載の図書保管管理装置。
【請求項4】
前記制御部は、前記コンテナの搬入命令を受けて前記コンテナを前記書棚における前記位置情報が示す位置に搬入した際に、前記読取書込部により前記コンテナの前記記憶素子に前記書棚における前記コンテナの収容される位置情報を書き込むことを特徴とする請求項1記載の図書保管管理装置。
【請求項5】
前記制御部は、前記コンテナを複数用意してこれをペアとし、このペアのコンテナを前記コンテナが収容される位置情報の一つに対応付け、その後、前記書棚において、このペアのコンテナを常に隣り合うように搬入することを特徴とする請求項1記載の図書保管管理装置。
【請求項6】
前記記憶素子に格納される位置情報は、前記書棚における、列、連、段、手前・奥に関する情報であることを特徴とする請求項1記載の図書保管管理装置。
【請求項7】
書棚に収容されるコンテナと、前記コンテナに付着され、前記コンテナの識別情報と前記書棚における前記コンテナが収容される位置情報を格納する記憶素子に対し、
前記位置情報を書込み、または、前記識別情報および前記位置情報を読み出すことにより前記コンテナを管理して、前記コンテナを前記書棚に搬入し、または、搬出する図書保管管理方法。
【請求項8】
前記管理方法は、前記コンテナの識別情報より前記書棚における前記位置情報を伴った前記書棚への前記コンテナの搬入命令を受けると、前記コンテナを前記書棚における前記位置情報が示す位置まで搬送し、前記記憶素子の前記識別情報および前記位置情報が読み取れないことによって前記書棚における前記位置情報が示す位置に他のコンテナの記憶素子が存在しないことを認識した後に、前記コンテナを前記書棚における前記位置情報が示す位置に搬入することを特徴とする請求項7記載の図書保管管理方法。
【請求項9】
前記管理方法は、前記書棚における前記位置情報と前記コンテナの識別情報とを伴った前記書棚からの前記コンテナの搬出命令を受けると、前記コンテナを前記書棚から搬出するべく前記位置情報が示す位置まで移動し、
前記コンテナの識別情報および前記位置情報を読み取ることによって前記書棚における前記位置情報が示す位置に前記搬出すべきコンテナの記憶素子が存在することを認識した後に、前記コンテナを前記書棚における前記位置情報が示す位置から搬出することを特徴とする請求項7記載の図書保管管理方法。
【請求項10】
前記管理方法は、前記コンテナを複数用意してこれをペアとし、このペアのコンテナを前記コンテナが収容される位置情報の一つに対応付け、その後、前記書棚において、このペアのコンテナを常に隣り合うように搬入することを特徴とする請求項7記載の図書保管管理方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−265076(P2010−265076A)
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願番号】特願2009−117614(P2009−117614)
【出願日】平成21年5月14日(2009.5.14)
【出願人】(000229759)日本ファイリング株式会社 (21)
【Fターム(参考)】
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願日】平成21年5月14日(2009.5.14)
【出願人】(000229759)日本ファイリング株式会社 (21)
【Fターム(参考)】
[ Back to top ]