
固体撮像装置、カメラ、車両及び監視装置
【課題】高いエピポーラ性と、2つのカメラの撮像特性の同一性と、信号出力タイミングの同期性とを実現することができる固体撮像装置を提供する。
【解決手段】本発明に係る固体撮像装置は、行列状に配置された複数の光電変換素子111を備える撮像部110と、第1の周波数帯域の光を集光する第1集光部150と、第1集光部150と離間して設けられ、第2の周波数帯域の光を集光する第2集光部151と、第1集光部150が集光した光及び第2集光部151が集光した光を撮像部110に入射する光入射部と、複数の光電変換素子111に含まれる複数の第1光電変換素子上に形成され、第1の周波数帯域に含まれる第3の周波数帯域の光を透過する第1のフィルタ158と、複数の光電変換素子に含まれる複数の第2光電変換素子上に形成され、第2の周波数帯域に含まれる第4の周波数帯域の光を透過する第2のフィルタ159とを備える。
【解決手段】本発明に係る固体撮像装置は、行列状に配置された複数の光電変換素子111を備える撮像部110と、第1の周波数帯域の光を集光する第1集光部150と、第1集光部150と離間して設けられ、第2の周波数帯域の光を集光する第2集光部151と、第1集光部150が集光した光及び第2集光部151が集光した光を撮像部110に入射する光入射部と、複数の光電変換素子111に含まれる複数の第1光電変換素子上に形成され、第1の周波数帯域に含まれる第3の周波数帯域の光を透過する第1のフィルタ158と、複数の光電変換素子に含まれる複数の第2光電変換素子上に形成され、第2の周波数帯域に含まれる第4の周波数帯域の光を透過する第2のフィルタ159とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、固体撮像装置、カメラ、車両及び監視装置に関し、特に、独立した複数の光入射経路から入射した光を撮像し、複数の映像信号を出力する固体撮像装置に関する。
【背景技術】
【0002】
立体映像の撮像、又は、被写体までの距離に関する情報(以下、「距離情報」と記す。)を伴った映像情報を得るために、2つの撮像領域を備えるカメラが用いられている。距離情報を伴う映像情報を出力するカメラは、車載用カメラとして用いることで、前方の障害の大きさ及び距離の検知し、ドライバに警告を発することができる。さらに、障害物の検知にともない、自動的にエンジン、ブレーキ及びステアリング等を制御することで、障害物への衝突を回避することができる。さらに、車内に設けたカメラにより、乗員の大きさ(大人又は子供等)、及び乗員の頭部の位置等を検知し、エアバックのOpenスピード及び圧力等を制御することができる。
【0003】
また、距離情報を伴う映像情報を出力するカメラは、監視カメラ及びTV電話等のカメラとして用いた場合には、所定の距離内の被写体のみを撮像及び表示することで、映像情報のデータ量の削減及び視認性の向上を実現することができる。
【0004】
従来の立体映像の撮像を行うカメラとしては、2台のカメラを備えるステレオカメラが知られている。
【0005】
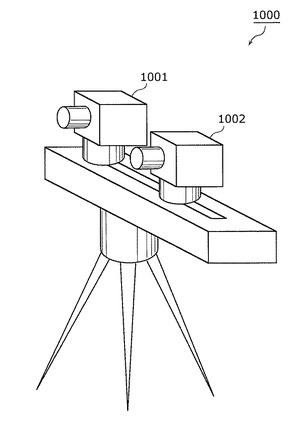
図18は、従来の立体映像を撮像する固体撮像装置の構成を示す図である。
図18に示す固体撮像装置1000は、ステレオカメラであり、カメラ1001及び1002を備える。カメラ1001及び1002は所定の距離を隔てて設置される。カメラ1001及び1002が撮像した映像信号より、立体映像が生成される。
【0006】
図18に示す従来の固体撮像装置1000は、2台のカメラ1001及び1002を用いるため、カメラ1001及び1002における製造ばらつき等の影響により、十分なエピポーラ性を保てない(2台のカメラが撮像した映像信号に位置的なズレが生じる)という問題と、2台のカメラ1001及び1002の撮像特性が同一ではないという問題と、2台のカメラから出力される信号の出力タイミングに時間的遅延が生じるという問題とにより、距離情報を算出するために多大な調整工数及び信号処理工程を必要とする。
【0007】
上記問題に対して、1チップのLSI(Large Scale Integration)として、2つの撮像領域を備えるステレオカメラが知られている(例えば、特許文献1参照。)。
【0008】
特許文献1記載のステレオカメラは、被写体を撮像する2つの撮像領域を1チップ化することにより、2つの撮像領域の製造ばらつきの影響を低減することができる。
【特許文献1】特開平9−74572号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、ステレオカメラ等の立体映像の撮像、又は、距離情報を伴った映像情報を出力するカメラにおいては、より高いエピポーラ性(2つの撮像領域が撮像した映像信号のばらつきが少ない状態)と、2つのカメラの撮像特性の同一性と、信号出力タイミングの同期性とを実現することが好ましい。
【0010】
そこで、本発明は、高いエピポーラ性と、2つのカメラの撮像特性の同一性と、信号出力タイミングの同期性とを実現することができる固体撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するために、本発明に係る固体撮像装置は、行列状に配置された複数の光電変換素子を備える撮像部と、第1の周波数帯域の光を集光する第1集光部と、前記第1集光部と離間して設けられ、前記第1の周波数帯域と異なる第2の周波数帯域の光を集光する第2集光部と、前記第1集光部が集光した光及び前記第2集光部が集光した光を前記撮像部に入射する光入射部と、前記複数の光電変換素子に含まれる複数の第1光電変換素子上に形成され、前記第1の周波数帯域に含まれる第3の周波数帯域の光を透過する第1のフィルタと、前記複数の光電変換素子に含まれる複数の第2光電変換素子上に形成され、前記第2の周波数帯域に含まれる第4の周波数帯域の光を透過する第2のフィルタとを備える。
【0012】
この構成によれば、本発明に係る固体撮像装置は、離間して設けられた第1集光部及び第2集光部で集光された光を単一の撮像部で光電変換し、2つの映像信号を出力することができる。これにより、2つの映像信号を出力する撮像部の位置が物理的に近いので、出力する2つの映像信号のばらつきを低減することができる。すなわち、出力する2つの映像信号のエピポーラ性と、撮像特性の同一性と、信号出力タイミングの同期性とを向上させることができる。さらに、第1集光部により集光された第1の周波数帯域の光は、第2のフィルタにより遮断されるので、第2光電変換素子には照射されない。よって、第2光電変換素子に対する第1の周波数帯域の光の干渉を低減することができる。また、第2集光部により集光された第2の周波数帯域の光は、第1のフィルタにより遮断されるので、第1光電変換素子には照射されない。よって、第1光電変換素子に対する第2の周波数帯域の光の干渉を低減することができる。これにより、離間して設けられた第1集光部及び第2集光部で集光された光を、単一の撮像部で容易に撮像することができる。さらに、視差方向のチップ長を抑えることができ、視差方向に対する垂直方向の領域が少なくてよい場合(垂直方向の解像度が低くてもよい場合)には、2つの撮像領域を隣接するよう配置したときよりもチップの縦横比を1に近づけることができる。これにより、反りなどの影響が低減される。また、円形のウェハーからの取れ数も改善される。
【0013】
また、前記固体撮像装置は、さらに、前記複数の第1光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を第1映像信号として出力し、前記複数の第2光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を第2映像信号として出力する出力手段と、前記出力手段が出力する前記第1映像信号及び前記第2映像信号から、被写体までの距離に関する情報を算出する算出手段を備えてもよい。
【0014】
この構成によれば、本発明に係る固体撮像装置は、第1映像信号及び第2映像信号と、被写体までの距離の情報とを外部に出力することができる。
【0015】
また、前記算出手段は、前記出力手段が出力する前記第1映像信号及び前記第2映像信号を保持する第1保持手段と、前記第1保持手段が保持する前記第1映像信号及び前記第2映像信号から、前記被写体に対する視差を算出する視差算出手段と、前記視差算出手段が算出した前記視差を保持する第2保持手段とを備えてもよい。
【0016】
この構成によれば、本発明に係る固体撮像装置は、第1映像信号及び第2映像信号と、視差とを外部に出力することができる。
【0017】
また、前記視差算出手段は、前記第1保持手段が保持する前記第1映像信号のm(1以上の整数)行の画素を行方向に所定の画素分ずらす処理を所定の回数繰り返すずらし手段と、前記ずらし手段による所定の回数の前記処理毎に、前記づらし手段がずらしたm行の映像信号と、前記第1保持手段が保持する前記第2映像信号のm行とに含まれる各画素の信号レベルの差分の絶対値を算出する差分算出手段と、前記ずらし手段による所定の回数の前記処理毎に、前記差分算出手段が算出した差分の絶対値の、n(1以上の整数)列毎の和を算出する加算手段と、前記ずらし手段による所定の回数の前記処理毎に、前記加算手段が算出した和が、前記第2保持手段が保持している和より小さい場合に、前記加算手段が算出した和と、前記ずらし手段による前記処理が実行された回数とを前記第2保持手段に保持する制御手段とを備え、前記第2保持手段は、前記ずらし手段による所定の回数の前記処理が終了した後に、保持する前記処理が実行された回数を、前記視差として出力してもよい。
【0018】
この構成によれば、映像信号のm行×n列毎に対する視差を算出することができる。
また、前記視差算出手段は、外部から入力されたm1(1以上の整数)行×n1(1以上の整数)列毎に、前記視差を算出し、前記ずらし手段は、前記第1保持手段が保持する前記第1映像信号のm1行の画素を行方向に所定の画素分ずらす処理を所定の回数繰り返し、前記差分算出手段は、前記ずらし手段による所定の回数の前記処理毎に、前記づらし手段がずらしたm1行の映像信号と、前記第1保持手段が保持する前記第2映像信号のm1行とに含まれる各画素の信号レベルの差分の絶対値を算出し、前記加算手段は、前記ずらし手段による所定の回数の前記処理毎に、前記差分算出手段が算出した差分絶対値の、n1列毎の和を算出してもよい。
【0019】
この構成によれば、外部から視差算出を行うブロック単位(m1行×n1列)を任意に設定することができる。
【0020】
また、前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、前記行列状に配置された複数の光電変換素子の各行には、前記第1光電変換素子と前記第2光電変換素子とのいずれか一方のみが配置されてもよい。
【0021】
この構成によれば、限られたチップサイズのなかで、第1光電変換素子及び第2光電変換素子の行方向の配置数を多くすることができる。すなわち、第1映像信号及び第2映像信号の視差方向(行方向)の解像度を増加させることができる。よって、算出される視差の精度を向上させることができる。
【0022】
また、前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、前記第1光電変換素子と前記第2光電変換素子とは、1以上の行毎に交互に配置されてもよい。
【0023】
この構成によれば、限られたチップサイズのなかで、第1光電変換素子及び第2光電変換素子の行方向の配置数が多くすることができる。すなわち、第1映像信号及び第2映像信号の視差方向(行方向)の解像度を増加させることができる。よって、算出される視差の精度を向上させることができる。さらに、互いに対応する第1光電変換素子と第2光電変換素子との配置位置を近くすることができるので、第1映像信号と第2映像信号のばらつきを低減することができる。
【0024】
また、前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、前記行列状に配置された複数の光電変換素子の各行には、前記第1光電変換素子と前記第2光電変換素子とのいずれか一方のみが配置され、前記第1光電変換素子と前記第2光電変換素子とは、m行毎に交互に配置されてもよい。
【0025】
この構成によれば、限られたチップサイズのなかで、第1光電変換素子及び第2光電変換素子の行方向の配置数が多くすることができる。すなわち、第1映像信号及び第2映像信号の視差方向(行方向)の解像度を増加させることができる。よって、算出される視差の精度を向上させることができる。さらに、互いに対応する第1光電変換素子と第2光電変換素子との配置位置を近くすることができるので、第1映像信号と第2映像信号のばらつきを低減することができる。さらに、視差算出手段で行われる視差算出処理の行の単位(m行)と同じ行毎に交互に、第1光電変換素子と第2光電変換素子とが配置される。これにより、行列状に配置される複数の光電変換素子の行を順次インクリメントしながら、映像信号を出力する場合でも、出力された第1映像信号及び第2映像信号から視差を順次算出することができる。すなわち、視差算出手段による視差算出の処理を効率よく、かつ高速に行うことができる。さらに、最小で、第1保持手段及び第2保持手段にそれぞれm行の第1映像信号、第2映像信号及び視差を保持すればよいので、第1保持手段及び第2保持手段の記憶容量を削減することができる。
【0026】
また、前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、前記固体撮像装置は、さらに、前記第1映像信号の画像と、前記第2映像信号の画像との列方向の画素のズレを示す値であるズレ値を保持するズレ値保持手段を備え、前記視差算出手段は、前記第1保持手段が保持する前記第1映像信号及び前記第2映像信号のうち一方の前記ズレ値に応じた行と、前記第1保持手段が保持する前記第1映像信号及び前記第2映像信号のうち他方とから視差を算出してもよい。
【0027】
この構成によれば、ズレ値保持手段が保持するズレ値に応じて、視差算出手段は、撮像部が出力する第1映像信号と第2映像信号との列方向のズレを補正することができる。よって、第1映像信号と第2撮像信号とのエピポーラ性を向上させることができる。
【0028】
また、前記撮像部は、前記第1光電変換素子の行を選択する第1行選択手段と、前記第2光電変換素子の行を選択する第2行選択手段とを備え、前記出力手段は、前記第1行選択手段により行選択された前記第1光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を前記第1映像信号として出力し、前記第2行選択手段により選択された前記第2光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を前記第2映像信号として出力し、前記固体撮像装置は、さらに、前記ズレ値保持手段が保持する前記ズレ値に応じた行から前記第1行選択手段又は前記第2行選択手段による行の選択を開始させる行制御手段を備えてもよい。
【0029】
この構成によれば、行制御手段による第1行選択手段又は第2行選択手段が行選択を開始する行を変更するだけの容易な制御で、第1映像信号と第2映像信号との列方向のズレを補正することができる。
【0030】
また、前記固体撮像装置は、さらに、前記第1映像信号及び前記第2映像信号から、前記ズレ値を算出するズレ値算出手段を備え、前記ズレ値保持手段は、前記ズレ値算出手段が算出した前記ズレ値を保持してもよい。
【0031】
この構成によれば、製品出荷後の、任意のタイミング(電源投入時、所定の時間毎、又は外部操作に応じたタイミング等)で、ズレ値を算出し、算出したズレ値に応じた補正を行うことができる。これにより、設置環境等による動作条件の変化、及び経時変化等により特性(ズレ値)が変化した場合にも、最適な補正を行うことができる。
【0032】
また、前記出力手段は、各列の前記光電変換素子が光電変換した信号電荷を、それぞれデジタル信号に変換し前記第1映像信号又は前記第2映像信号として出力する複数の変換手段を備えてもよい。
【0033】
この構成によれば、各行の光電変換素子に蓄積された信号電荷を同時にデジタル信号に変換し(A/D変換し)、出力することができる。よって、映像信号の読出しを高速に行うことができる。
【0034】
また、前記第1保持手段は、少なくともm行の前記第1映像信号及び前記第2映像信号を保持してもよい。
【0035】
この構成によれば、第1保持手段及び第2保持手段の記憶容量を削減することができる。これにより、固体撮像装置の小型化及びコスト低減を行うことができる。
【0036】
また、前記第1保持手段は、少なくとも2×m行の前記第1映像信号及び前記第2映像信号を保持し、前記第2保持手段は、m行単位の少なくとも2×m行の前記視差算出手段が算出した前記視差を保持し、前記視差算出手段は、前記2×m行のうち一方のm行の前記第1映像信号及び前記第2映像信号と、該m行の第1映像信号及び第2映像信号に対応するm行の視差とが出力されている間に、前記2×m行のうち他方のm行の前記第1映像信号及び前記第2映像信号から、m行の視差を算出してもよい。
【0037】
この構成によれば、第1保持手段及び第2保持手段の記憶容量を削減することができる。これにより、固体撮像装置の小型化及びコスト低減を行うことができる。さらに、一方のm行の視差を算出している間に、他方のm行の映像信号(第1映像信号及び第2映像信号)と距離情報とを出力することができる。これにより、フレームレートを高めることができる。
【0038】
また、前記算出手段は、さらに、前記第2保持手段が保持する前記視差と、所定の範囲とを比較し、前記視差が所定の範囲に含まれない場合には、該視差に対応する前記第1映像信号及び前記第2映像信号を所定の画像に置き換えて出力する置き換え手段を備えてもよい。
【0039】
この構成によれば、視差の値が所定の範囲外の場合(例えば、被写体が離れている場合)には、対応する画像を黒塗り等に置き換えることで、所定の距離内の対象物(被写体)のみが表示された画像が出力される。
【0040】
また、前記第1のフィルタ及び前記第2のフィルタは、誘電体で構成される第1誘電体層及び第2誘電体層と、前記第1誘電体層と前記第2誘電体層との間に形成される絶縁体で構成される絶縁体層とを備え、前記絶縁体層の光学膜厚は、前記第1誘電体層及び前記第2誘電体層の光学膜厚と異なってもよい。
【0041】
この構成によれば、第1のフィルタ及び第2のフィルタに、耐光性及び耐熱性に優れた多層膜干渉フィルタが用いられる。これにより、無機材料のみを用いてフィルタを構成することができる。フィルタを無機材料のみで構成することで、高温及び高照射下で使用しても退色現象を生じない。よって、車載用途として車両の外部、エンジンルーム内又は車室内等の場所にも搭載することができる。
【0042】
また、前記固体撮像装置は、さらに、前記第1周波数帯域及び前記第2周波数帯域を含む周波数帯域の光を被写体に照射する光源を備えてもよい。
【0043】
この構成によれば、光源が被写体に照射した光の反射光を撮像部で受光することができる。これにより、夜間及び暗所での撮像を行うことができる。
【0044】
また、前記第1周波数帯域及び前記第2周波数帯域は、近赤外領域に含まれてもよい。
この構成によれば、近赤外領域の光を用いて、被写体の撮像を行うことができる。これにより、車載カメラ等として本発明の固体撮像装置を用いた場合に、視認性の向上と、対向車両及び歩行者に対する眩惑の防止とを実現することができる。
【0045】
また、本発明に係るカメラは、前記固体撮像装置を備える。
この構成によれば、撮像部が出力する第1映像信号と第2映像信号とのエピポーラ性が向上することにより、撮像部が出力する第1映像信号及び第2映像信号から、撮像した被写体への距離を容易かつ高精度に算出することができる。よって、高精度の距離情報を算出できるカメラを実現することができる。
【0046】
また、本発明に係る車両は、前記カメラを備える。
この構成によれば、撮像部が出力する第1映像信号と第2映像信号とのエピポーラ性が向上することにより、撮像部が出力する第1映像信号及び第2映像信号から、撮像した被写体への距離を容易かつ高精度に算出することができる。よって、高精度の距離情報を算出できるカメラを備える車両を実現することができる。
【0047】
また、本発明に係る監視装置は、前記カメラを備える。
この構成によれば、撮像部が出力する第1映像信号と第2映像信号とのエピポーラ性が向上することにより、撮像部が出力する第1映像信号及び第2映像信号から、撮像した被写体への距離を容易かつ高精度に算出することができる。よって、高精度の距離情報を算出できるカメラを備える監視装置を実現することができる。
【発明の効果】
【0048】
本発明は、高いエピポーラ性と、2つのカメラの撮像特性の同一性と、信号出力タイミングの同期性とを実現することができる固体撮像装置を提供することができる。
【発明を実施するための最良の形態】
【0049】
以下、本発明に係る固体撮像装置の実施の形態について、図面を参照しながら詳細に説明する。
【0050】
(実施の形態1)
本発明の実施の形態1に係る固体撮像装置は、単一の撮像領域で撮像した2つの映像信号から、被写体までの距離の情報を算出する。これにより、個別の撮像領域で撮像した2つの映像信号を用いる場合に比べ、2つの映像信号の位置的なばらつきを低減することができる。よって、2つの映像信号のエピポーラ性を向上させることができる。
【0051】
まず、本実施の形態に係る固体撮像装置の構成を説明する。
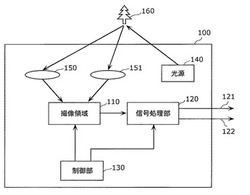
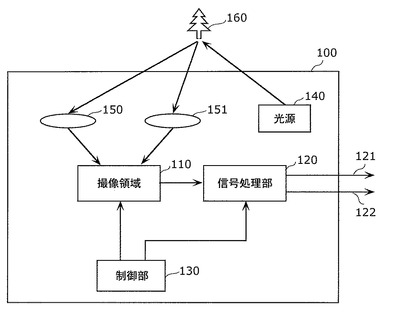
図1は、本発明の実施の形態1に係る固体撮像装置の構成を示す図である。
【0052】
図1に示す固体撮像装置100は、撮像の被写体160の映像情報及び距離情報を出力する。固体撮像装置100は、例えば、車両に搭載された近赤外領域の光(以下、「近赤外光」と記す。)を用いた暗視機能を有するカメラである。固体撮像装置100は、撮像領域110と、信号処理部120と、制御部130と、光源140と、レンズ150及び151とを備える。
【0053】
光源140は、近赤外光(波長700nm〜1100nm)を被写体160に照射する。光源140は、例えば、LED(発光ダイオード)又は半導体レーザで構成される。
【0054】
レンズ150及び151は、被写体160からの反射光を撮像領域110に集光する。レンズ151は、レンズ150と水平方向に離間して設けられる。
【0055】
撮像領域110は、CMOSイメージセンサであり、入射光に応じた映像信号を出力する。撮像領域110被写体160からの反射光を電気信号に変換し、変換した電気信号を2つの映像信号(左画像及び右画像)として出力する。具体的には、撮像領域110は、レンズ150で集光された光を電気信号に変換し、変換した電気信号を左画像として出力する。撮像領域110は、レンズ151で集光された光を電気信号に変換し、変換した電気信号を右画像として出力する。
【0056】
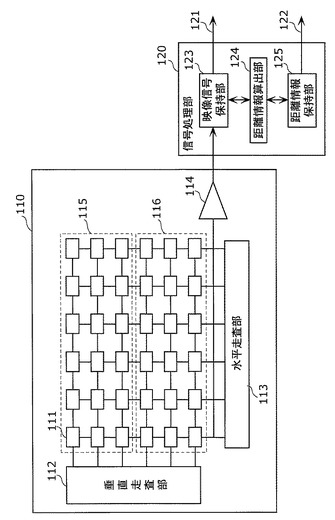
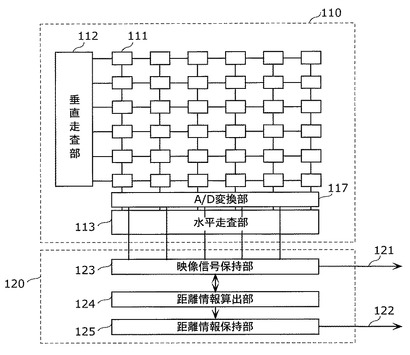
図2は、撮像領域110及び信号処理部120の構成を示す図である。撮像領域110は、複数の光電変換素子111と、垂直走査部112と、水平走査部113と、A/D変換部114とを備える。
【0057】
複数の光電変換素子111は、半導体基板上に行列状に配置される。複数の光電変換素子111は、受光量に応じた信号電荷を蓄積する。複数の光電変換素子111は、第1撮像領域115又は第2撮像領域116に含まれる。例えば、第1撮像領域115に含まれる光電変換素子111と、第2撮像領域116に含まれる光電変換素子111とは、同数である。第1撮像領域115に含まれる複数の光電変換素子111は、レンズ150で集光された光を光電変換する。第2撮像領域116に含まれる複数の光電変換素子111は、レンズ151で集光された光を光電変換する。なお、行列状に配置される複数の光電変換素子111の行方向は水平方向に対応し、列方向は垂直方向に対応する。
【0058】
垂直走査部112は、複数の光電変換素子111のうち各行に対応する光電変換素子111を順次選択する。
【0059】
水平走査部113は、複数の光電変換素子111のうち各列に対応する光電変換素子111を順次選択する。
【0060】
A/D変換部114は、垂直走査部112により行を選択され、かつ水平走査部113に列を選択された光電変換素子111に蓄積された信号電荷を、電圧又は電流に変換し、変換した電圧又は電流を映像信号として出力する。すなわち、A/D変換部114は、光電変換素子111に蓄積された信号電荷に基づくアナログ信号を、デジタル信号に変換し映像信号として出力する。また、A/D変換部114が出力する映像信号は、第1撮像領域115に含まれる光電変換素子111に蓄積された信号電荷を電圧又は電流に変換した左画像に対応する映像信号と、第2撮像領域116に含まれる光電変換素子111に蓄積された信号電荷を電圧又は電流に変換した右画像に対応する映像信号とが含まれる。
【0061】
制御部130は、撮像領域110及び信号処理部120を制御する。具体的には、制御部130は、垂直走査部112の行の選択を開始させる垂直同期信号と、水平走査部113の列の選択を開始させる水平同期信号と、垂直走査部112の駆動タイミングを制御する電荷蓄積制御信号とを生成する。電荷蓄積制御信号は、複数の光電変換素子111の電荷蓄積時間(露光時間)を制御するための信号である。
【0062】
信号処理部120は、被写体までの距離情報を、撮像領域110が出力する左画像と右画像とから算出し、映像信号121及び距離情報122を外部に出力する。信号処理部120は、映像信号保持部123と、距離情報算出部124と、距離情報保持部125とを備える。
【0063】
映像信号保持部123は、撮像領域110が出力する映像信号である左画像及び右画像を保持する。また、映像信号保持部123は、保持する映像信号121を外部に出力する。
【0064】
距離情報算出部124は、映像信号保持部123が保持する左画像及び右画像から、被写体までの距離情報である視差を算出する。
【0065】
距離情報保持部125は、距離情報算出部124が算出した距離情報(視差)を保持する。また、距離情報保持部125は、保持する距離情報122を外部に出力する。
【0066】
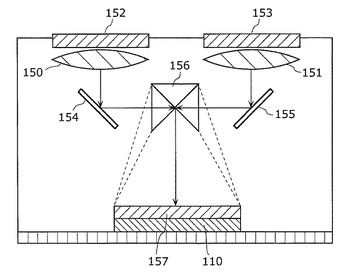
図3は、撮像領域110の断面構造を模式的に示す図である。図3に示すように、固体撮像装置100は、さらに、フィルタ152、153及び157と。ミラー154及び155と、ダイクロックミラー156とを備える。フィルタ152、153及び157は、例えば、多層膜干渉フィルタである。
【0067】
被写体160からの反射光は、フィルタ152、レンズ150、ミラー154、ダイクロックミラー156及びフィルタ157からなる光入射経路により、撮像領域110に入射される。また、被写体160からの反射光は、フィルタ153、レンズ151、ミラー155、ダイクロックミラー156及びフィルタ157からなる光入射経路により、撮像領域110に入射される。
【0068】
フィルタ152は、レンズ150の上部に形成され、第1の周波数帯域の光のみを透過する。フィルタ153は、レンズ151の上部に形成され、第1の周波数帯域と異なる第2の周波数帯域の光のみを透過する。ミラー154は、レンズ150が集光した光をダイクロックミラー156に反射する。ミラー155は、レンズ151が集光した光をダイクロックミラー156に反射する。ダイクロックミラー156は、ミラー154及びミラー155からの光を撮像領域110に反射する。すなわち、フィルタ152及びレンズ150により、第1の周波数帯域の光が集光される。フィルタ153及びレンズ151により、第2の周波数帯域の光が集光される。ミラー154、155及びダイクロックミラー156により、集光された第1の周波数帯域の光及び第2の周波数帯域の光が撮像領域110に入射される。フィルタ157は、撮像領域110上に形成される。ここで、第1の周波数帯域及び第2の周波数帯域は、近赤外領域(波長700nm〜1100nm)内の、互いに重複しない異なる周波数帯域である。例えば、第1の周波数帯域は、波長750nm〜850nmの周波数帯域であり、第2の周波数帯域は、波長950nm〜1050nmの周波数帯域である。
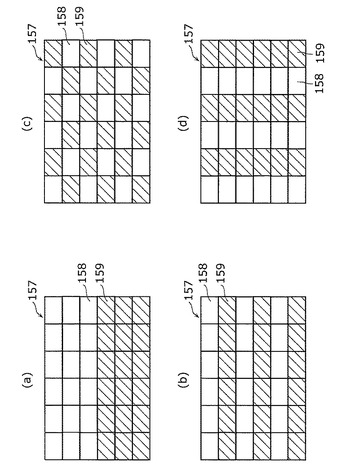
【0069】
図4は、フィルタ157を上面から見た構成を模式的に示す図である。フィルタ157は、第1の周波数帯域の光のみを透過する第1のフィルタ158と、第2の周波数帯域の光のみを透過する第2のフィルタ159とを含む。第1のフィルタ158は、第1撮像領域115に含まれる光電変換素子111上に形成される。第2のフィルタ159は、第2撮像領域116に含まれる光電変換素子111上に形成される。例えば、図4(a)に示すように、第1のフィルタ158と第2のフィルタ159とは、行列状に配置された複数の光電変換素子111が形成される領域を列方向(垂直方向)に分割するように配置される。具体的には、第1のフィルタ158は、行列状に配置される複数の光電変換素子111のうち上半分の行(6×6画素の場合は、上方向の3行)の光電変換素子111上に形成される。また、第2のフィルタ159は、行列状に配置される複数の光電変換素子111のうち下半分の行(6×6画素の場合は、下方向の3行)の光電変換素子111上に形成される。
【0070】
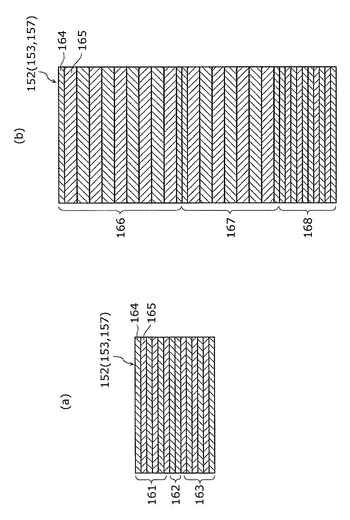
図5は、フィルタ152の断面構造を模式的に示す図である。なお、フィルタ153及び157の断面構造も図5と同様である。
【0071】
図5(a)に示すフィルタ152は、上部反射層161と、スペーサ層162と、下部反射層163とを備える。スペーサ層162は下部反射層163上に積層され、上部反射層161は、スペーサ層162上に積層される。
【0072】
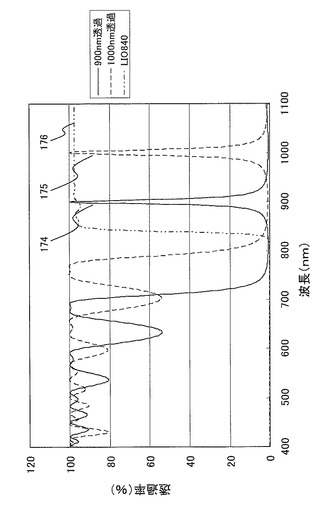
上部反射層161及び下部反射層163は、3層の高屈折率材料で構成される層164と、3層の低屈折率材料で構成される層165とを、交互に積層した構造である。高屈折率材料で構成される層164は、例えば、酸化チタンTiO2(屈折率2.5)で構成される。低屈折率材料で構成される層165は、例えば、酸化シリコンSiO2(屈折率1.45)で構成される。スペーサ層162は、高屈折率材料で構成され、例えば、酸化チタンTiO2(屈折率2.5)で構成される。また、フィルタ152は、スペーサ層162を中心にして、光学膜厚λ/4(λ:設定中心波長)の多層膜構造の上部反射層161及び下部反射層163が対称となるように配置される。このような層構造により、反射帯域中に透過帯域領域が選択的に形成され、さらにスペーサ層162の膜厚を変化させることによって、その透過ピーク波長を変化させることができる。
【0073】
図6は、図5(a)に示すフィルタ152の光の波長に対する光の透過率の計算結果を示す図である。なお、透過率の計算には誘電体多層膜干渉フィルタにおいて広く知られている特性マトリクス法を用いた。図6に示すように、例えば、TiO2層164を90nmとし、SiO2層165を155nmとすることで、実線174で示す特性の設定中心波長900nmの多層膜干渉フィルタを構成することができる。また、TiO2層164を99nmとし、SiO2層165を171nmとすることで、破線175で示す設定中心波長1000nmの多層膜干渉フィルタを構成することができる。ここで、スペーサ層162は、光学膜厚をλ/2としている。また、図6に示すように、図5(a)に示すフィルタ152は、短波長帯(波長800nm以下)の光を透過する特性を有するが、短波長カット光学フィルタ(例えば朝日分光(株)LIO840等:図6の二点鎖線176)を併用することで、波長900nm又は1000nmの光のみを透過することができる。
【0074】
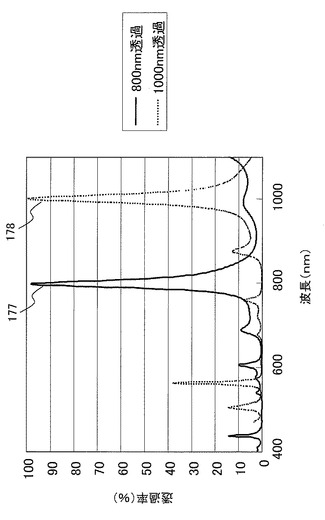
なお、フィルタ152の構成は、図5(b)に示すように、所定の膜厚及び層数のTiO2層とSiO2層とを積層した、上部反射層166と、スペーサ層167と、下部反射層168とを構成してもよい。
【0075】
図7は、図5(b)に示すフィルタ152の光の波長に対する光の透過率の計算結果を示す図である。図7に示すように、上部反射層166と、スペーサ層167と、下部反射層168との膜厚及び層数を最適化することにより、実線177で示す特性の設定中心波長800nmの多層膜干渉フィルタ及び破線178で示す設定中心波長1000nmの多層膜干渉フィルタを構成することができる。
【0076】
なお、高屈折率材料で構成される層164は、酸化チタンTiO2で構成されるとしたが、窒化シリコン(SiN)、酸化タンタル(Ta2O5)、又は酸化ジルコニウム(ZrO2)等で構成してもよい。また、低屈折率材料で構成される層165は、酸化シリコンSiO2で構成されるとしたが用いたが、高屈折率材料として用いる誘電体と比較して屈折率が低ければ、酸化シリコンSiO2以外の材料を用いてもよい。
【0077】
また、上述した設定中心波長、スペーサ層の膜厚、ペア数は1例であり、所望の分光特性に合わせて設定すればよい。
【0078】
このように、誘電体多層膜干渉フィルタを用いることで、フィルタを通常の半導体プロセスで作製可能となり、従来の顔料フィルタのように固体撮像装置の受光部や配線部などを形成した後に、通常の半導体プロセスとは異なる工程、いわゆるオンチッププロセスでフィルタを形成する必要がない。よって、プロセスの安定化、及び生産性向上に伴う低コスト化を実現することができる。
【0079】
さらに、誘電体多層膜干渉フィルタを用いることにより、無機材料のみを用いてフィルタを構成することができる。これにより、高温及び高照射下で使用しても退色現象を生じないことから、車載用途として車両の外部、エンジンルーム内又は車室内等の場所にも搭載することができる。
【0080】
次に、本実施の形態に係る固体撮像装置100の動作を説明する。
光源140から照射された近赤外光は、被写体160で反射される。被写体160で反射した反射光は、フィルタ152により第1の周波数帯域の光のみが透過し、レンズ150で集光され、ミラー154で反射され、ダイクロックミラー156で反射され、フィルタ157を介して撮像領域110に照射される。撮像領域110に照射される第1の周波数帯域の光は、第1のフィルタ158を透過し、第1撮像領域115の光電変換素子111に入射する。また、被写体160で反射した反射光は、フィルタ153により第2の周波数帯域の光のみが透過し、レンズ151で集光され、ミラー155で反射され、ダイクロックミラー156で反射され、フィルタ157を介して撮像領域110に照射される。撮像領域110に照射される第2の周波数帯域の光は、第2のフィルタ159を透過し、第2撮像領域116の光電変換素子111に入射する。このように、撮像領域110上に第1のフィルタ158及び第2のフィルタ159を含むフィルタ157を備えることにより、フィルタ152を介してレンズ150で集光された第1の周波数帯域の光は、第2のフィルタ159で遮断されるので第2撮像領域116には入射せず第1撮像領域115にのみ入射する。また、フィルタ153を介してレンズ151で集光された第2の周波数帯域の光は、第1のフィルタ158で遮断されるので第1撮像領域115には入射せず第2撮像領域116にのみ入射する。すなわち、本発明の実施の形態1に係る固体撮像装置100は、第1撮像領域115及び第2撮像領域116に入射する光の干渉を防止することができる。また、フィルタ152、153及び157を備えることで、遮光板等を設けなくともよいので、構造を簡略化することができる。これにより、単一のCMOSイメージセンサで、2つのレンズから入射した光を互いに干渉させることなく容易に撮像することができる。
【0081】
第1撮像領域115に含まれる複数の光電変換素子111は、レンズ150で集光された第1の周波数帯域の光の入射光量に応じた信号電荷を蓄積する。第2撮像領域116に含まれる複数の光電変換素子111は、レンズ151で集光された第2の周波数帯域の光の入射光量に応じた信号電荷を蓄積する。制御部130は、垂直走査部112の行の選択を開始させる垂直同期信号と、水平走査部113の列の選択を開始させる水平同期信号と、垂直走査部112の駆動タイミングを制御する電荷蓄積制御信号とを生成する。垂直走査部112は、制御部130からの垂直同期信号により、行列状に配置された光電変換素子111の行を順次選択する。水平走査部113は、制御部130からの水平同期信号により、行列状に配置された光電変換素子111の列を順次選択する。A/D変換部114は、垂直走査部112により行を選択され、かつ水平走査部113に列を選択された光電変換素子111に蓄積された信号電荷を順次デジタル信号に変換し、デジタル化した映像信号を出力する。
【0082】
このように、本発明の実施の形態1に係る固体撮像装置100は、単一のCMOSイメージセンサで撮像した2つの映像信号(左画像及び右画像)を出力する。これにより、異なるCMOSイメージセンサで撮像した映像信号に比べて、ばらつきを低減し、エピポーラ性と、撮像特性の同一性と、信号出力タイミングの同期性とを向上させることができる。ここで、エピポーラ性が高いとは、2つの映像信号の垂直方向の位置的なずれ(差分)が少ないことを意味する。
【0083】
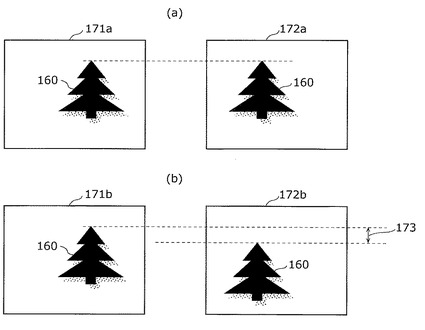
図8は、撮像領域110が出力する映像信号の画像の一例を示す図である。図8において、画像171a及び171bは、第1撮像領域115で撮像された左画像であり、画像172a及び172bは、第2撮像領域116で撮像された右画像である。例えば、被写体160を撮像した場合、撮像領域110は、図8(a)に示す画像171a及び172aを出力する。
【0084】
映像信号保持部123は、撮像領域110が出力した左画像の映像信号及び右画像の映像信号を保持する。距離情報算出部124は、映像信号保持部123が保持する左画像の映像信号及び右画像の映像信号から、被写体160の距離情報を算出する。
【0085】
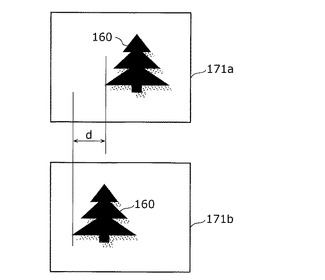
図9は、図8(a)に示す画像に対する距離情報算出部124の処理を説明するための図である。距離情報算出部124は、左画像171aと、右画像172aから被写体160の視差dを算出する。視差dは、左画像171aと、右画像172aにおける被写体160の水平方向のズレ(差分)である。例えば、距離情報算出部124は、左画像171aと、右画像172aの各行のデータを比較し、一致するか否かを判定する。次に、右画像172aの各行のデータを右側にシフトさせ、シフトさせたデータが左画像171aと一致するか否かを判定する。右画像172aの各行のデータを右側にシフトする動作及び左画像171aと一致を判定する処理を繰り返す。信号処理部120は、各行の左画像171aと右画像172aがもっとも類似したときの右画像172aのシフト数を視差dとして算出する。具体的には、距離情報算出部124は、映像信号保持部123が保持する左画像のm行(m:1以上の整数)の画素を行方向に所定の画素分ずらす処理を所定の回数繰り返す。距離情報算出部124は、所定の回数の処理毎に、ずらしたm行の左画像と、映像信号保持部123が保持する右画像のm行とに含まれる各画素の信号レベルの差分の絶対値を算出する。距離情報算出部124は、所定の回数の処理毎に、算出した差分の絶対値、n列(n:1以上の整数)毎の和を算出する。距離情報算出部124は、所定の回数の前記処理毎に、算出した和が、距離情報保持部125が保持している和より小さい場合に、算出した和と、ずらし処理が実行された回数とを距離情報保持部125に保持する。距離情報保持部125は、距離情報算出部124による所定の回数のずらし処理が終了した後に、保持する処理が実行された回数を、視差として外部に出力する。例えば、距離情報算出部124のずらし処理によるずらし量(通常1画素)をn画素とし、ずらし処理が実行された回数をN回とし、画素ピッチをPxとした場合には、視差ZはZ=n×N×Pxで算出される。なお、距離情報算出部124のずらし処理によるずらし量は、外部からの入力により設定されてもよい。これにより、任意のずらし量を設定し、視差の精度及び処理時間を任意に設定することができる。
【0086】
以下に、信号処理部120の具体的な動作を説明する。
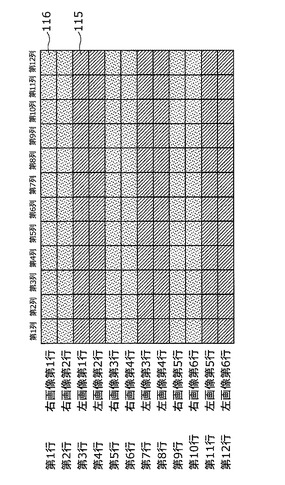
図10は、撮像領域110の左画像及び右画像の光電変換に用いられる光電変換素子111の配置の一例を示す図である。図10に示すように、12行×12列の光電変換素子111に対し、左画像を撮像する第1撮像領域115と、右画像を撮像する第2撮像領域116とが、2行毎に交互に配置された場合の信号処理部120の動作を説明する。図10に示すように、複数の光電変換素子111の第1行及び第2行が、第2撮像領域116の第1行及び第2行に対応し、複数の光電変換素子111の第3行及び第4行が、第1撮像領域115の第1行及び第2行に対応し、複数の光電変換素子111の第5行及び第6行が、第2撮像領域116の第3行及び第4行に対応し、複数の光電変換素子111の第7行及び第8行が、第1撮像領域115の第3行及び第4行に対応し、複数の光電変換素子111の第9行及び第10行が、第2撮像領域116の第5行及び第6行に対応し、複数の光電変換素子111の第11行及び第12行が、第1撮像領域115の第5行及び第6行に対応する。
【0087】
まず、A/D変換部114は、右画像の第1行(複数の光電変換素子111の第1行)に対応する光電変換素子111の蓄積電荷をA/D変換し、映像信号保持部123に保持する。次に、A/D変換部114は、右画像の第2行(複数の光電変換素子111の第2行)に対応する光電変換素子111の蓄積電荷をA/D変換し、映像信号保持部123に保持する。次に、A/D変換部114は、左画像の第1行(複数の光電変換素子111の第3行)に対応する光電変換素子111の蓄積電荷をA/D変換し、映像信号保持部123に保持する。次に、A/D変換部114は、右画像の第2行(複数の光電変換素子111の第4行)に対応する光電変換素子111の蓄積電荷をA/D変換し、映像信号保持部123に保持する。
【0088】
次に、距離情報算出部124は、映像信号保持部123が保持する右画像及び左画像の第1行及び第2行の映像信号から、視差を算出する。
【0089】
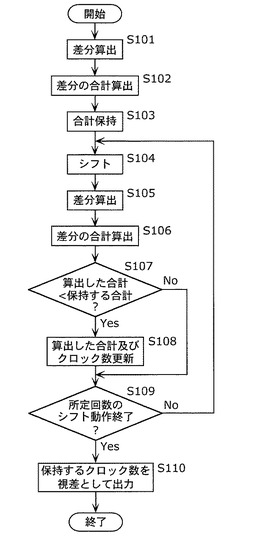
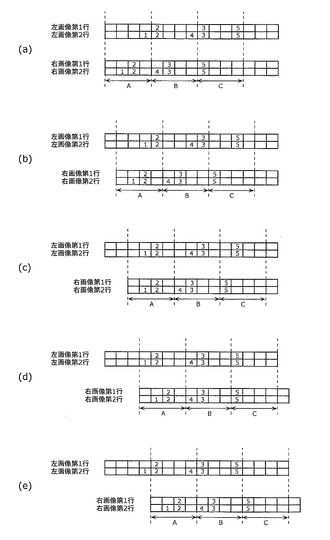
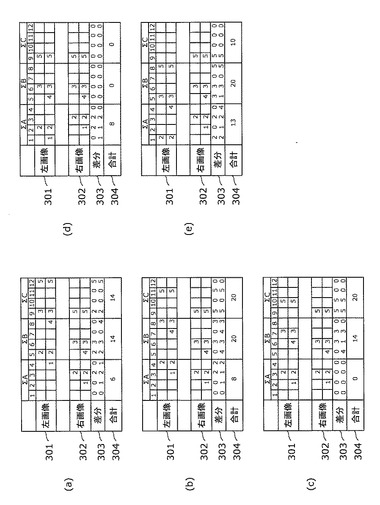
図11は、信号処理部120による視差の算出の処理の流れを示すフローチャートである。図12及び図13は、距離情報算出部124による、視差の算出処理を説明するための図である。図12(a)に示すような右画像及び左画像の映像信号が読み出され、映像信号保持部123に保持された場合について説明する。なお、図中の枠内の数値は、映像信号の信号レベルを示し、例えば、入射光の輝度に対応した値である。
【0090】
距離情報算出部124は、例えば、2行の映像信号の12列の映像信号を4列毎の3つの領域A、B及びCに分割し、それぞれの領域に対して、視差を算出する。すなわち、距離情報算出部124は、2行×4列の画素毎に視差を算出する。まず、距離情報算出部124は、図13(a)に示すように、左画像の各画素の信号レベル301と、右画像の各画素の信号レベル302の差分の絶対値303を算出する(S101)。次に、距離情報算出部124は、各領域A、B及びCにおける差分の絶対値303の合計値304を算出する(S102)。例えば、図13(a)に示すように、各領域A、B及びCの合計値304として「6」、「14」及び「14」が算出される。距離情報算出部124は、算出した合計値304を距離情報保持部125に保持する(S103)。
【0091】
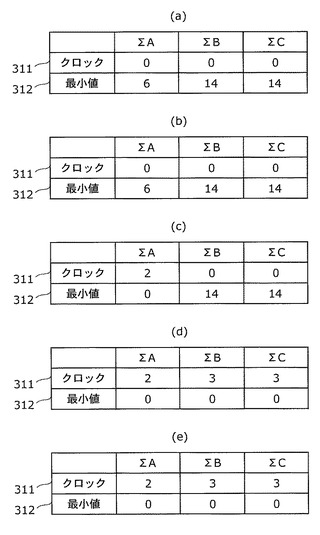
図14は、信号処理部120の視差の算出処理において、距離情報保持部125に保持されるデータの一例を示す図である。距離情報算出部124により、図13(a)に示す合計値304が算出された場合、距離情報保持部125に、図14(a)に示すクロック数311として「0」が保持され、各領域A、B及びCの合計値304の最小値312として「6」、「14」及び「14」が保持される。ここで、クロック数311は、左画像のシフト動作が行われた回数に対応する。
【0092】
次に、距離情報算出部124は、図12(b)に示すように、左画像を左方向(又は右画像を右方向)に1画素シフトさせる(S104)。距離情報算出部124は、右画像と、シフトさせた左画像との差分の絶対値を算出する(S105)。距離情報算出部124は、各領域A、B及びCにおける差分の絶対値303の合計値304を算出する(S106)。例えば、図13(b)に示すように、各領域A、B及びCの合計値304として「8」、「20」及び「20」が算出される。
【0093】
次に、距離情報算出部124は、距離情報保持部125に保持される各領域A、B及びCの合計値の最小値312(図14(a))と、算出した合計値304とを比較する。算出した各領域の合計値「8」、「20」及び「20」は、距離情報保持部125に保持される各領域の合計値「6」、「14」及び「14」より大きいので(S107でNo)、距離情報算出部124は、距離情報保持部125に保持されるクロック数311及び差分の合計値の最小値312を変更せずに、保持する。よって、距離情報保持部125には、図14(a)に示すクロック数311及び差分の合計値の最小値312が保持される(図14(b))。
【0094】
次に、距離情報算出部124は、所定の回数のシフト動作が行われたか否かを判定する。なお、ここでは、所定の回数が「4」の場合について説明する。シフト回数は「1」であり所定の回数(4回)のシフト動作が行われていないので(S109でNo)、距離情報算出部124は、図12(c)に示すように、左画像を左方向に1画素シフトさせる(S104)。距離情報算出部124は、右画像と、シフトさせた左画像との差分の絶対値を算出する(S105)。距離情報算出部124は、各領域A、B及びCにおける差分の絶対値303の合計値304を算出する(S106)。例えば、図13(c)に示すように、各領域A、B及びCの合計値304として「0」、「14」及び「20」が算出される。
【0095】
次に、距離情報算出部124は、距離情報保持部125に保持される各領域A、B及びCの合計値の最小値312(図14(b))と、算出した合計値304とを比較する。算出した領域Aの合計値「0」は、距離情報保持部125に保持される領域Aの合計値「6」より小さいので(S107でYes)、距離情報算出部124は、距離情報保持部125に保持される領域Aのクロック数311を、現在のクロック数(シフト回数)「2」に更新し、差分の合計値の最小値312を算出した合計値「0」に更新する。また、算出した領域Bの合計値「14」は、距離情報保持部125に保持される領域Bの合計値「14」と等しく、算出した領域Cの合計値「20」は、距離情報保持部125に保持される領域Cの合計値「14」より大きいので(S107でNo)、距離情報算出部124は、距離情報保持部125に保持される領域B及びCのクロック数311及び差分の合計値の最小値312を変更せずに、保持する。よって、距離情報保持部125には、図14(c)に示すクロック数311及び差分の合計値の最小値312が保持される。なお、距離情報算出部124が算出した合計値304と、距離情報保持部125に保持される合計値の最小値312が等しい場合に、距離情報保持部125に保持されるクロック数311を更新してもよい。
【0096】
シフト回数は「2」であり、所定の回数(4回)のシフト動作が行われていないので(S109でNo)、距離情報算出部124は、図12(d)に示すように、左画像を左方向に1画素シフトさせる(S104)。距離情報算出部124は、右画像と、シフトさせた左画像との差分の絶対値を算出する(S105)。距離情報算出部124は、各領域A、B及びCにおける差分の絶対値303の合計値304を算出する(S106)。例えば、図13(d)に示すように、各領域A、B及びCの合計値304として「8」、「0」及び「0」が算出される。
【0097】
次に、距離情報算出部124は、距離情報保持部125に保持される各領域A、B及びCの合計値の最小値312(図14(c))と、算出した合計値304とを比較する。算出した領域Aの合計値「8」は、距離情報保持部125に保持される領域Aの合計値「0」より大きいので(S107でNo)、距離情報算出部124は、距離情報保持部125に保持される領域Aのクロック数311及び差分の合計値の最小値312を変更せずに、保持する。また、算出した領域B及びCの合計値「0」及び「0」は、距離情報保持部125に保持される領域B及びCの合計値「14」及び「14」より小さいので(S107でYes)、距離情報算出部124は、距離情報保持部125に保持される領域B及びCのクロック数311を、現在のクロック数(シフト回数)を「3」に更新し、差分の合計値の最小値312を算出した合計値「0」に更新する。よって、距離情報保持部125には、図14(d)に示すクロック数311及び差分の合計値の最小値312が保持される。
【0098】
シフト数は「3」であり、所定の回数(4回)のシフト動作が行われていないので(S109でNo)、距離情報算出部124は、図12(e)に示すように、左画像を左方向に1画素シフトさせる(S104)。距離情報算出部124は、右画像と、シフトさせた左画像との差分の絶対値を算出する(S105)。距離情報算出部124は、各領域A、B及びCにおける差分の絶対値303の合計値304を算出する(S106)。例えば、図13(e)に示すように、各領域A、B及びCの合計値304として「13」、「20」及び「10」が算出される。
【0099】
次に、距離情報算出部124は、距離情報保持部125に保持される各領域A、B及びCの合計値(図14(d))と、算出した合計値304とを比較する。算出した各領域の合計値「13」、「20」及び「10」は、距離情報保持部125に保持される各領域の合計値「0」、「0」及び「0」より大きいので(S107でNo)、距離情報算出部124は、距離情報保持部125に保持される各領域のクロック数311及び差分の合計値の最小値312を変更せずに、保持する。よって、距離情報保持部125には、図14(e)に示すクロック数311及び差分の合計値の最小値312が保持される。
【0100】
シフト数は「4」であり、所定の回数(4回)のシフト動作が行われたので(S109でYes)、距離情報保持部125は、保持するクロック数311を、視差として出力する。
【0101】
次に、信号処理部120は、右画像及び左画像の第3行及び第4行の映像信号を読出し、読出した映像信号に対して同様の視差算出処理を行う。さらに、信号処理部120は、右画像及び左画像の第5行及び第6行の映像信号を読出し、読出した映像信号に対して同様の視差算出処理を行う。
【0102】
以上の処理により、信号処理部120は、右画像及び左画像から2行×4列の画素毎に視差を算出し出力する。ここで、信号処理部120において、2行毎に視差を算出する場合には、図10に示すように2行毎に、右画像及び左画像に用いる光電変換素子111を配置することで、読み出した映像信号に対して、順次視差の算出処理を行うことができる。よって、信号処理部120による視差の算出処理を遅延なく高速に行うことができる。
【0103】
さらに、読み出した映像信号に対して順次視差の算出処理を行い、映像信号及び視差を算出することで、映像信号保持部123の記憶容量を削減することができる。すなわち、映像信号保持部123は、少なくとも距離情報算出部124による視差の算出単位(上記例では2行)の右画像及び左画像のデータを保持すればよい。また、距離情報保持部125は、少なくとも距離情報算出部124による視差の算出単位(上記例では2行)の視差を保持すればよい。なお、映像信号保持部123は、複数の視差の算出単位(例えば、視差算出単位の2倍)の右画像及び左画像のデータを保持し、距離情報保持部125は、複数の視差算出単位の視差を保持してもよい。これにより、距離情報算出部124は、映像信号保持部123に保持されている2行分の右画像及び左画像の映像信号と、距離情報保持部125に保持されている該映像信号に対応する2行分の視差とが出力されている間に、他の2行分の右画像及び左画像から、視差を算出することができる。これにより、フレームレートを高めることができる。
【0104】
なお、信号処理部120は、映像信号121及び距離情報122をパラレルに出力してもよいし、共通の端子からシリアルに出力してもよい。さらに、信号処理部120は、映像信号121及び距離情報(視差)122とを個別に出力しているが、左画像又は右画像に視差の情報を付与して出力してもよい。さらに、左画像及び右画像を合成して出力してもよい。さらに、信号処理部120は、算出した視差とから固体撮像装置100から被写体160への距離を算出し、距離情報122として出力してもよい。
【0105】
また、上記説明では、12行×12列の光電変換素子111が配置された場合について説明したが、光電変換素子111の数(画素数)は、これに限定されるものではない。
【0106】
また、上記説明では、2行×4列の画素毎に、視差を算出する例について説明したが、視差を算出する画素の範囲は、これに限定されるものではない。また、m行×n列(m及びnは、1以上の整数)の画素毎に視差を算出する場合には、第1撮像領域及び第2撮像領域の配置を、m行毎のストライプ状にすることで、視差の算出処理を遅延なく高速に行うことができる。
【0107】
また、上記説明では、ステップS101及びS105において、左画像と右画像との各画素の信号レベルの差分の絶対値を算出し、ステップS102及びS106において、各画素の差分の合計値を算出しているが、以下の処理に置き換えてもよい。各領域A、B及びC毎に、左画像の複数の画素の信号レベルを加算し、上述した信号レベル301に置き換える。右画像も同様に、各領域A、B及びC毎に、複数の画素の信号レベルを加算し、上述した信号レベル302に置き換える。各領域A、B及びC毎に、差分の絶対値を算出し、上述した合計値304に置き換えて、その後、同様の処理を行ってもよい。これにより、細密な高画素の撮像素子を用いた場合に、一定の距離情報の精度を保ちながら計算処理量を削減することができる。
【0108】
また、上記説明では、ステップS104において1画素ずつシフトさせる処理を行ったが複数画素ずつシフトさせる処理を行ってもよい。
【0109】
ここで、図8(b)に示すように、左画像171bと、右画像172bとが垂直方向にズレが生じている(エピポーラ性が悪い)場合、一致を比較する各行において、ズレにより画像が一致しないため、距離情報算出部124の視差dの算出処理における精度が低下する。本発明の実施の形態1に係る固体撮像装置100では、上述したように、単一のCMOSイメージセンサで右画像と左画像とを撮像することで、右画像と左画像との水平方向及び垂直方向のズレを低減することができる。これにより、視差dの算出精度を向上させることができる。また、撮像面において高いエピポーラ性が得られるとともに、右画像及び左画像の光電変換特性も同じであるため視差dを精度高く容易に算出することができる。
【0110】
また、本発明の実施の形態1に係る固体撮像装置100において、図4(a)に示すように、フィルタ157は、複数の光電変換素子111が配置される領域を水平方向に二分する第1のフィルタ158及び第2のフィルタ159を含む。これにより、複数の光電変換素子111が配置される領域を垂直方向に分割するように第1のフィルタ158及び第2のフィルタ159を形成する場合に比べて、撮像領域110が出力する左画像及び右画像の水平方向の画素数を増加させることができる。ここで、距離情報算出部124による視差dの算出処理において、視差dの算出に用いる映像信号の水平方向の解像度が高いほうが、より高い精度の視差dを算出することができる。よって、撮像領域110が出力する映像信号の水平方向の画素数を増加させることで、距離情報算出部124が算出する視差dの精度を向上させることができる。なお、水平方向の解像度を増加させるためには、行列状に配置された複数の光電変換素子111の各行に、第1のフィルタ158と第2のフィルタ159とのいずれか一方のみが配置されればよい。例えば、フィルタ157の第1のフィルタ158及び第2のフィルタ159は、図4(b)に示すように、1行毎に交互に配置されてもよい。すなわち、水平方向のストライプ状であってもよい。さらに、第1のフィルタ158及び第2のフィルタ159は、複数行毎に交互に配置されてもよい。また、図4(c)に示すように、第1のフィルタ158及び第2のフィルタ159を格子状に配置してもよい。また、図4(d)に示すように、第1のフィルタ158及び第2のフィルタ159を垂直方向のストライプ状に配置してもよい。
【0111】
なお、上記説明において、フィルタ152はレンズ150の上部に形成され、フィルタ153は、レンズ151の上部に形成されるとしたが、フィルタ152はレンズ150の下部(レンズ150とミラー154との間)に形成され、フィルタ153は、レンズ151の下部(レンズ151とミラー155との間)に形成されてもよい。
【0112】
また、上記説明において、撮像領域110及び信号処理部120の構成として、図2に示す構成を説明したが、図15に示す構成としてもよい。図15は、本発明の実施の形態1に係る固体撮像装置100の撮像領域110及び信号処理部120の変形例の構成を示す図である。例えば、図15に示すように、撮像領域110は、行列状に配置された光電変換素子111の各列の光電変換素子111が光電変換した信号電荷をそれぞれデジタル信号に変換するA/D変換部117を備えてもよい。すなわち、A/D変換部117は、各行に配置された複数の光電変換素子111が光電変換した信号電荷を同時にA/D変換する機能を有する。各列の信号電荷をデジタル信号に変換するA/D変換部117を備えることにより、高速にA/D変換を行うことができる。これにより、撮像領域110からの読出し処理を高速に行うことができる。また、各行の信号電荷を同時に読み出すことができるので、信号処理部120における行単位の視差算出処理を効率よく行うことができる。
【0113】
また、上記説明において、レンズ150及び151が集光した光を撮像領域110に入射する構造として、図3に示すミラー154、155及びダイクロックミラー156とを備える構造を説明したが、レンズ150及び151が集光した光を撮像領域110に入射する構造であればよく、図3に示す構造に限定されるものではない。例えば、ダイクロックミラー156の代わりに、ミラー154で反射された光を撮像領域110上に反射するミラーと、ミラー155で反射された光を撮像領域110上に反射するミラーとを備えてもよい。
【0114】
また、上記説明では、第1の周波数帯域と、第2の周波数帯域とは、互いに重複しない異なる周波数帯域であるとしたが、第1の周波数帯域の一部と、第2の周波数帯域の一部とが重複してもよい。例えば、フィルタ152が透過する周波数帯域の透過率が50%以下の領域が、フィルタ153が透過する周波数帯域の一部に含まれてもよい。
【0115】
また、上記説明において、第1のフィルタ158は、第1の周波数帯域の光のみを透過するとしたが、第1の周波数帯域に含まれる周波数帯域のみを透過してもよい。すなわち、フィルタ152は、第1の周波数帯域(例えば、波長750nm〜850nm)の光のみを透過し、第1のフィルタ158は、第1の周波数帯域に含まれる周波数帯域(例えば、波長770nm〜830nm)の光のみを透過してもよい。さらに、第1のフィルタ158は、透過率が低い周波数帯域として、第1の周波数帯域に含まれない周波数帯域を透過してもよい。例えば、第1のフィルタ158は、透過率30%以下であれば、第1の周波数帯域(例えば、波長750nm〜850nm)に含まれない帯域を含む広帯域な周波数特性(例えば、波長700nm〜900nm)を有してもよい。
【0116】
同様に、第2のフィルタ159は、第2の周波数帯域に含まれる周波数帯域のみを透過してもよい。さらに、第2のフィルタ159は、透過率が低い周波数帯域として、第2の周波数帯域に含まれない周波数帯域を透過してもよい。
【0117】
また、上記説明において、信号処理部120は、撮像領域110で撮像された右画像及び左画像を出力するとしたが、算出した視差に基づき右画像及び左画像の一部を置き換えて出力してもよい。例えば、信号処理部120は、距離情報保持部125が保持する視差と、所定の範囲とを比較し、視差が所定の範囲に含まれない場合には、該視差に対応する右画像及び左画像を所定の画像(所定の画素信号又は固定値(黒又は白等))に置き換えて出力してもよい。これにより、視差の値が所定の範囲外の場合(例えば、被写体が離れている場合)には、対応する画像を黒塗り等に置き換えることで、所定の距離内の対象物(被写体)のみが表示された画像が出力される。
【0118】
(実施の形態2)
本発明の実施の形態2に係る固体撮像装置は、撮像領域が出力する右画像と左画像との垂直方向のずれを補正する機能を有する。これにより、右画像と左画像とに垂直方向のずれがある場合でも、高いエピポーラ性を実現し、視差の算出を高精度で行うことができる。
【0119】
まず、本発明の実施の形態2に係る固体撮像装置の構成を説明する。
図16は、本発明の実施の形態2に係る固体撮像装置の構成を示す図である。なお、図1と同様の要素には同一の符号を付しており、詳細な説明は省略する。
【0120】
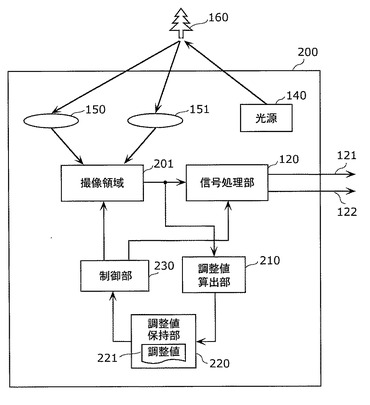
図16に示す固体撮像装置200は、図1に示す固体撮像装置100に対して、撮像領域201及び制御部230の構成と、調整値算出部210及び調整値保持部220を備える点とが異なる。
【0121】
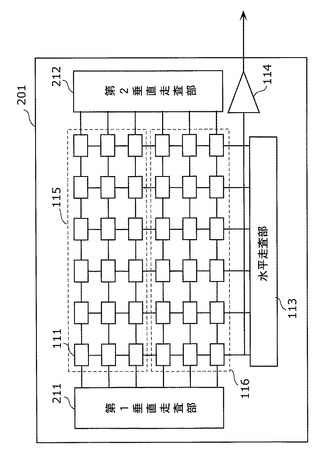
図17は、撮像領域201の構成を示す図である。撮像領域201は、複数の光電変換素子111と、第1垂直走査部211と、第2垂直走査部212と、水平走査部113と、A/D変換部114とを備える。なお、図2と同様の要素には、同一の符号を付している。
【0122】
複数の光電変換素子111は、半導体基板上に行列状に配置される。複数の光電変換素子111は、受光量に応じた信号電荷を蓄積する。複数の光電変換素子111は、第1撮像領域115又は第2撮像領域116に含まれる。第1撮像領域115に含まれる複数の光電変換素子111は、レンズ150で集光された光を光電変換する。第2撮像領域116に含まれる複数の光電変換素子111は、レンズ151で集光された光を光電変換する。
【0123】
第1垂直走査部211は、第1撮像領域115の複数の光電変換素子111のうち各行に対応する光電変換素子111を順次選択する。第2垂直走査部212は、第2撮像領域116の複数の光電変換素子111のうち各行に対応する光電変換素子111を順次選択する。
【0124】
水平走査部113は、複数の光電変換素子111のうち各列に対応する光電変換素子111を順次選択する。
【0125】
A/D変換部114は、第1垂直走査部211又は第2垂直走査部212により行を選択され、かつ水平走査部113に列を選択された光電変換素子111に蓄積された信号電荷を、電圧又は電流に変換し、変換した電圧又は電流を映像信号として出力する。具体的には、A/D変換部114は、第1垂直走査部211により行選択された第1撮像領域115に含まれる光電変換素子111が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を左画像として出力する。A/D変換部114は、第2垂直走査部212により選択された第2撮像領域に含まれる光電変換素子111が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を右画像として出力する。
【0126】
調整値算出部210は、撮像領域201が出力する右画像及び左画像から、右画像と左画像との垂直方向のズレを算出する。具体的には、調整値算出部210は、左画像に対する、右画像の垂直方向の画素のズレを示す値である調整値221を算出する。例えば、図8(b)に示す左画像171b及び右画像172bの例では、調整値算出部210は、左画像171bと右画像172bとの垂直方向のズレ173を算出する。例えば、調整値算出部210は、左画像171bと、右画像172bとの画像データからそれぞれが一致する特異点を抽出し、画素データのYアドレスの差分を調整値221として出力する。例えば、調整値算出部210は、左画像171bと、右画像172bのデータを比較し、一致するか否かを判定する。次に、調整値算出部210は、右画像172bのデータを下側にシフトさせ、シフトさせたデータが左画像171bと一致するか否かを判定する。調整値算出部210は、右画像172bのデータを下側に所定の回数シフトする動作毎に、左画像171bと一致を判定する処理を行う。次に、調整値算出部210は、下側へシフトする前の右画像172bのデータを上側にシフトさせ、シフトさせたデータが左画像171bと一致するか否かを判定する。調整値算出部210は、右画像172bのデータを上側に所定の回数シフトする動作毎に、左画像171bと一致を判定する処理を行う。所定の回数の一致判定処理の後、調整値算出部210は、最も画像が一致したシフト回数を調整値221として出力する。なお、調整値算出部210による左画像171b及び右画像172bの一致判定処理は、左画像171b及び右画像172bの所定の列毎に行ってもよい。
【0127】
調整値算出部210は、例えば、固体撮像装置200の電源投入時に上述した調整値221の算出処理を行う。なお、調整値算出部210は、所定の時間毎、又は外部からの操作に応じて、上述した調整値221の算出処理を行ってもよい。
【0128】
調整値保持部220は、調整値算出部210が算出した調整値221を保持する。
制御部230は、調整値保持部220が保持する調整値221に応じた行から、撮像領域201の第1垂直走査部211の行選択を開始させる第1行制御信号と、第2垂直走査部212の行選択を開始させる第2行制御信号とを生成する。
【0129】
次に、本発明の実施の形態2に係る固体撮像装置200の動作を説明する。
例えば、図10に示すように、12行×12列の光電変換素子111に対し、左画像を撮像する第1撮像領域115と、右画像を撮像する第2撮像領域116とが、2行毎に交互に配置された場合の動作を説明する。また、図8(b)に示すように左画像171b及び右画像172bが垂直方向にずれている場合の動作を説明する。なお、図8(b)において、左画像171bが、右画像172bより上側に2画素分ずれているとする。
【0130】
調整値算出部210は、左画像171b及び右画像172bから、左画像に対する、右画像の垂直方向の画素のズレを示す値である調整値221を算出する。図8(b)に示す例では、例えば、調整値221として「2」が算出される。調整値算出部210は、算出した調整値221を調整値保持部220に保持する。
【0131】
制御部230は、調整値保持部220が保持する調整値221の値「2」より、左画像を撮像する第1撮像領域115の行選択を行う第1垂直走査部211に、通常の行選択を開始する行(左画像の第1行)から行選択を開始させる第1行制御信号を出力する。また、制御部230は、右画像を撮像する第2撮像領域116の行選択を行う第2垂直走査部212に、通常の行選択を開始する行に補正値の値「2」を加算した行(右画像の第3行)から行選択を開始させる第2行制御信号を出力する。
【0132】
制御部230が出力する第1行制御信号及び第2行制御信号により、撮像領域201は、右画像の第3行の信号電荷に対応する映像信号を読出し、次に右画像の第4行の信号電荷に対応する映像信号を読出し、次に左画像の第1行の信号電荷に対応する映像信号を読出し、次に左画像の第2行の信号電荷に対応する映像信号を読み出す。信号処理部120は、読み出された右画像の第3行及び第4行と、左画像の第1行及び第2行とから、視差を算出する。なお、信号処理部120による視差の算出処理は、実施の形態1と同様であり、詳細な説明は省略する。
【0133】
以上の動作により、本発明の実施の形態2に係る固体撮像装置200は、撮像領域201が出力する右画像及び左画像の垂直方向のズレを算出し、算出したズレに基づき、撮像領域201の行選択を開始する行を変更する。これにより、垂直方向のズレを補正した右画像及び左画像を出力することができる。よって、右画像と左画像とのエピポーラ性を向上させ、信号処理部120が算出する視差の精度を向上させることができる。
【0134】
なお、上記説明において、撮像領域201は、図17に示すように第1垂直走査部211と第2垂直走査部212とを備えるとしたが、単一の垂直走査部が調整値221に応じて、出力する左画像及び右画像のズレがなくなるように、行を選択してもよい。
【0135】
また、上記説明において、制御部230が、調整値保持部220が保持する調整値221に応じた行から、撮像領域201の第1垂直走査部211の行選択を開始させる第1行制御信号と、第2垂直走査部212の行選択を開始させる第2行制御信号とを生成することで、ズレを補正するとしたが、信号処理部120においてズレの補正を行ってもよい。例えば、距離情報算出部124は、映像信号保持部123が保持する右画像及び左画像のうち一方の調整値221に応じた行と、映像信号保持部123が保持する右画像及び左画像のうち他方とから視差を算出してもよい。すなわち、距離情報算出部124は、右画像及び左画像に垂直方向のズレが生じている場合には、映像信号保持部123に保持されている右画像及び左画像を調整値221に応じて補正し、補正した右画像及び左画像に対して視差の算出を行う。なお、右画像及び左画像の補正は、距離情報算出部124が視差を算出する際に行ってもよいし、撮像領域110から出力される右画像及び左画像を補正し映像信号保持部123に保持してもよし、映像信号保持部123に保持されている右画像及び左画像に補正を行い映像信号保持部123が保持しているデータを更新してもよい。
【0136】
また、上記説明において、調整値算出部210が、調整値221を算出するとしたが、調整値221は、外部から入力されてもよい。例えば、出荷時等に、外部の装置が、固体撮像装置200から出力された映像信号から調整値221を算出し、算出した調整値221を固体撮像装置200に入力し、調整値保持部220に保持してもよい。なお、外部から調整値221を入力する場合には、固体撮像装置200は、調整値算出部210を備えなくともよい。
【0137】
また、上記実施の形態1及び2における説明では、本発明を車両に搭載された近赤外光を用いた暗視機能を有するカメラに適用した実施例について説明したが、車両に搭載された近赤外光を用いた暗視機能を有するカメラ以外にも、撮像被写体までの距離情報を出力するカメラとして適用することができる。例えば、本発明に係る固体撮像装置は、監視装置に用いられるカメラ及びTV電話のカメラ等に適用することができる。
【0138】
また、上記実施の形態1及び2における説明では、固体撮像装置は、近赤外光を照射する光源140を備えるとしたが、光源140は、近赤外光以外の光を照射してもよい。例えば、光源140は、可視光を照射してもよい。この場合、上述した第1の周波数帯域及び第2の周波数帯域は、可視光内の、互いに重複しない異なる周波数帯域であればよい。さらに、暗視機能を必要としない場合には、固体撮像装置は、光源140を備えなくともよい。
【産業上の利用可能性】
【0139】
本発明は、固体撮像装置に適用でき、特に、車載用のカメラ、監視カメラ及びTV電話のカメラ等に適用できる。
【図面の簡単な説明】
【0140】
【図1】本発明の実施の形態1に係る固体撮像装置の構成を示す図である。
【図2】本発明の実施の形態1に係る固体撮像装置の撮像領域及び信号処理部の構成を示す図である。
【図3】本発明の実施の形態1に係る固体撮像装置の撮像領域の断面構造を模式的に示す図である。
【図4】本発明の実施の形態1に係る固体撮像装置のフィルタ157を上面から見た構成を模式的に示す図である。
【図5】本発明の実施の形態1に係る固体撮像装置のフィルタの断面構造を模して気的に示す図である。
【図6】本発明の実施の形態1に係る固体撮像装置のフィルタの光の波長に対する光の透過率を示す図である。
【図7】本発明の実施の形態1に係る固体撮像装置のフィルタの光の波長に対する光の透過率を示す図である。
【図8】本発明の実施の形態1に係る固体撮像装置の撮像領域が出力する映像信号の一例を示す図である。
【図9】本発明の実施の形態1に係る固体撮像装置の信号処理部の処理を説明するための図である。
【図10】本発明の実施の形態1に係る固体撮像装置の左画像及び右画像の光電変換に用いられる光電変換素子の配置の一例を示す図である。
【図11】本発明の実施の形態1に係る固体撮像装置の信号処理部による距離情報の算出の処理の流れを示すフローチャートである。
【図12】本発明の実施の形態1に係る固体撮像装置の距離情報算出部による距離情報の算出処理を説明するための図である。
【図13】本発明の実施の形態1に係る固体撮像装置の距離情報算出部による距離情報の算出処理を説明するための図である。
【図14】本発明の実施の形態1に係る固体撮像装置の距離情報算出部の距離情報の算出処理において距離情報保持部に保持されるデータの一例を示す図である。
【図15】本発明の実施の形態1に係る固体撮像装置の撮像領域及び信号処理部の変形例の構成を示す図である。
【図16】本発明の実施の形態2に係る固体撮像装置の構成を示す図である。
【図17】本発明の実施の形態2に係る固体撮像装置の撮像領域及び信号処理部の構成を示す図である。
【図18】従来の固体撮像装置の構成を示す図である。
【符号の説明】
【0141】
100、200、1000 固体撮像装置
110、201 撮像領域
111 光電変換素子
112 垂直走査部
113 水平走査部
114、117 A/D変換部
115 第1撮像領域
116 第2撮像領域
120 信号処理部
121 映像信号
122 距離情報
123 映像信号保持部
124 距離情報算出部
125 距離情報保持部
130、230 制御部
140 光源
150、151 レンズ
152、153、157 フィルタ
154、155 ミラー
156 ダイクロックミラー
158 第1のフィルタ
159 第2のフィルタ
160 被写体
161、166 上部反射層
162、167 スペーサ層
163、168 下部反射層
164 TiO2層
165 SiO2層
171a、171b 左画像
172a、172b 右画像
210 調整値算出部
211 第1垂直走査部
212 第2垂直走査部
220 調整値保持部
221 調整値
1001、1002 カメラ
【技術分野】
【0001】
本発明は、固体撮像装置、カメラ、車両及び監視装置に関し、特に、独立した複数の光入射経路から入射した光を撮像し、複数の映像信号を出力する固体撮像装置に関する。
【背景技術】
【0002】
立体映像の撮像、又は、被写体までの距離に関する情報(以下、「距離情報」と記す。)を伴った映像情報を得るために、2つの撮像領域を備えるカメラが用いられている。距離情報を伴う映像情報を出力するカメラは、車載用カメラとして用いることで、前方の障害の大きさ及び距離の検知し、ドライバに警告を発することができる。さらに、障害物の検知にともない、自動的にエンジン、ブレーキ及びステアリング等を制御することで、障害物への衝突を回避することができる。さらに、車内に設けたカメラにより、乗員の大きさ(大人又は子供等)、及び乗員の頭部の位置等を検知し、エアバックのOpenスピード及び圧力等を制御することができる。
【0003】
また、距離情報を伴う映像情報を出力するカメラは、監視カメラ及びTV電話等のカメラとして用いた場合には、所定の距離内の被写体のみを撮像及び表示することで、映像情報のデータ量の削減及び視認性の向上を実現することができる。
【0004】
従来の立体映像の撮像を行うカメラとしては、2台のカメラを備えるステレオカメラが知られている。
【0005】
図18は、従来の立体映像を撮像する固体撮像装置の構成を示す図である。
図18に示す固体撮像装置1000は、ステレオカメラであり、カメラ1001及び1002を備える。カメラ1001及び1002は所定の距離を隔てて設置される。カメラ1001及び1002が撮像した映像信号より、立体映像が生成される。
【0006】
図18に示す従来の固体撮像装置1000は、2台のカメラ1001及び1002を用いるため、カメラ1001及び1002における製造ばらつき等の影響により、十分なエピポーラ性を保てない(2台のカメラが撮像した映像信号に位置的なズレが生じる)という問題と、2台のカメラ1001及び1002の撮像特性が同一ではないという問題と、2台のカメラから出力される信号の出力タイミングに時間的遅延が生じるという問題とにより、距離情報を算出するために多大な調整工数及び信号処理工程を必要とする。
【0007】
上記問題に対して、1チップのLSI(Large Scale Integration)として、2つの撮像領域を備えるステレオカメラが知られている(例えば、特許文献1参照。)。
【0008】
特許文献1記載のステレオカメラは、被写体を撮像する2つの撮像領域を1チップ化することにより、2つの撮像領域の製造ばらつきの影響を低減することができる。
【特許文献1】特開平9−74572号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、ステレオカメラ等の立体映像の撮像、又は、距離情報を伴った映像情報を出力するカメラにおいては、より高いエピポーラ性(2つの撮像領域が撮像した映像信号のばらつきが少ない状態)と、2つのカメラの撮像特性の同一性と、信号出力タイミングの同期性とを実現することが好ましい。
【0010】
そこで、本発明は、高いエピポーラ性と、2つのカメラの撮像特性の同一性と、信号出力タイミングの同期性とを実現することができる固体撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するために、本発明に係る固体撮像装置は、行列状に配置された複数の光電変換素子を備える撮像部と、第1の周波数帯域の光を集光する第1集光部と、前記第1集光部と離間して設けられ、前記第1の周波数帯域と異なる第2の周波数帯域の光を集光する第2集光部と、前記第1集光部が集光した光及び前記第2集光部が集光した光を前記撮像部に入射する光入射部と、前記複数の光電変換素子に含まれる複数の第1光電変換素子上に形成され、前記第1の周波数帯域に含まれる第3の周波数帯域の光を透過する第1のフィルタと、前記複数の光電変換素子に含まれる複数の第2光電変換素子上に形成され、前記第2の周波数帯域に含まれる第4の周波数帯域の光を透過する第2のフィルタとを備える。
【0012】
この構成によれば、本発明に係る固体撮像装置は、離間して設けられた第1集光部及び第2集光部で集光された光を単一の撮像部で光電変換し、2つの映像信号を出力することができる。これにより、2つの映像信号を出力する撮像部の位置が物理的に近いので、出力する2つの映像信号のばらつきを低減することができる。すなわち、出力する2つの映像信号のエピポーラ性と、撮像特性の同一性と、信号出力タイミングの同期性とを向上させることができる。さらに、第1集光部により集光された第1の周波数帯域の光は、第2のフィルタにより遮断されるので、第2光電変換素子には照射されない。よって、第2光電変換素子に対する第1の周波数帯域の光の干渉を低減することができる。また、第2集光部により集光された第2の周波数帯域の光は、第1のフィルタにより遮断されるので、第1光電変換素子には照射されない。よって、第1光電変換素子に対する第2の周波数帯域の光の干渉を低減することができる。これにより、離間して設けられた第1集光部及び第2集光部で集光された光を、単一の撮像部で容易に撮像することができる。さらに、視差方向のチップ長を抑えることができ、視差方向に対する垂直方向の領域が少なくてよい場合(垂直方向の解像度が低くてもよい場合)には、2つの撮像領域を隣接するよう配置したときよりもチップの縦横比を1に近づけることができる。これにより、反りなどの影響が低減される。また、円形のウェハーからの取れ数も改善される。
【0013】
また、前記固体撮像装置は、さらに、前記複数の第1光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を第1映像信号として出力し、前記複数の第2光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を第2映像信号として出力する出力手段と、前記出力手段が出力する前記第1映像信号及び前記第2映像信号から、被写体までの距離に関する情報を算出する算出手段を備えてもよい。
【0014】
この構成によれば、本発明に係る固体撮像装置は、第1映像信号及び第2映像信号と、被写体までの距離の情報とを外部に出力することができる。
【0015】
また、前記算出手段は、前記出力手段が出力する前記第1映像信号及び前記第2映像信号を保持する第1保持手段と、前記第1保持手段が保持する前記第1映像信号及び前記第2映像信号から、前記被写体に対する視差を算出する視差算出手段と、前記視差算出手段が算出した前記視差を保持する第2保持手段とを備えてもよい。
【0016】
この構成によれば、本発明に係る固体撮像装置は、第1映像信号及び第2映像信号と、視差とを外部に出力することができる。
【0017】
また、前記視差算出手段は、前記第1保持手段が保持する前記第1映像信号のm(1以上の整数)行の画素を行方向に所定の画素分ずらす処理を所定の回数繰り返すずらし手段と、前記ずらし手段による所定の回数の前記処理毎に、前記づらし手段がずらしたm行の映像信号と、前記第1保持手段が保持する前記第2映像信号のm行とに含まれる各画素の信号レベルの差分の絶対値を算出する差分算出手段と、前記ずらし手段による所定の回数の前記処理毎に、前記差分算出手段が算出した差分の絶対値の、n(1以上の整数)列毎の和を算出する加算手段と、前記ずらし手段による所定の回数の前記処理毎に、前記加算手段が算出した和が、前記第2保持手段が保持している和より小さい場合に、前記加算手段が算出した和と、前記ずらし手段による前記処理が実行された回数とを前記第2保持手段に保持する制御手段とを備え、前記第2保持手段は、前記ずらし手段による所定の回数の前記処理が終了した後に、保持する前記処理が実行された回数を、前記視差として出力してもよい。
【0018】
この構成によれば、映像信号のm行×n列毎に対する視差を算出することができる。
また、前記視差算出手段は、外部から入力されたm1(1以上の整数)行×n1(1以上の整数)列毎に、前記視差を算出し、前記ずらし手段は、前記第1保持手段が保持する前記第1映像信号のm1行の画素を行方向に所定の画素分ずらす処理を所定の回数繰り返し、前記差分算出手段は、前記ずらし手段による所定の回数の前記処理毎に、前記づらし手段がずらしたm1行の映像信号と、前記第1保持手段が保持する前記第2映像信号のm1行とに含まれる各画素の信号レベルの差分の絶対値を算出し、前記加算手段は、前記ずらし手段による所定の回数の前記処理毎に、前記差分算出手段が算出した差分絶対値の、n1列毎の和を算出してもよい。
【0019】
この構成によれば、外部から視差算出を行うブロック単位(m1行×n1列)を任意に設定することができる。
【0020】
また、前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、前記行列状に配置された複数の光電変換素子の各行には、前記第1光電変換素子と前記第2光電変換素子とのいずれか一方のみが配置されてもよい。
【0021】
この構成によれば、限られたチップサイズのなかで、第1光電変換素子及び第2光電変換素子の行方向の配置数を多くすることができる。すなわち、第1映像信号及び第2映像信号の視差方向(行方向)の解像度を増加させることができる。よって、算出される視差の精度を向上させることができる。
【0022】
また、前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、前記第1光電変換素子と前記第2光電変換素子とは、1以上の行毎に交互に配置されてもよい。
【0023】
この構成によれば、限られたチップサイズのなかで、第1光電変換素子及び第2光電変換素子の行方向の配置数が多くすることができる。すなわち、第1映像信号及び第2映像信号の視差方向(行方向)の解像度を増加させることができる。よって、算出される視差の精度を向上させることができる。さらに、互いに対応する第1光電変換素子と第2光電変換素子との配置位置を近くすることができるので、第1映像信号と第2映像信号のばらつきを低減することができる。
【0024】
また、前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、前記行列状に配置された複数の光電変換素子の各行には、前記第1光電変換素子と前記第2光電変換素子とのいずれか一方のみが配置され、前記第1光電変換素子と前記第2光電変換素子とは、m行毎に交互に配置されてもよい。
【0025】
この構成によれば、限られたチップサイズのなかで、第1光電変換素子及び第2光電変換素子の行方向の配置数が多くすることができる。すなわち、第1映像信号及び第2映像信号の視差方向(行方向)の解像度を増加させることができる。よって、算出される視差の精度を向上させることができる。さらに、互いに対応する第1光電変換素子と第2光電変換素子との配置位置を近くすることができるので、第1映像信号と第2映像信号のばらつきを低減することができる。さらに、視差算出手段で行われる視差算出処理の行の単位(m行)と同じ行毎に交互に、第1光電変換素子と第2光電変換素子とが配置される。これにより、行列状に配置される複数の光電変換素子の行を順次インクリメントしながら、映像信号を出力する場合でも、出力された第1映像信号及び第2映像信号から視差を順次算出することができる。すなわち、視差算出手段による視差算出の処理を効率よく、かつ高速に行うことができる。さらに、最小で、第1保持手段及び第2保持手段にそれぞれm行の第1映像信号、第2映像信号及び視差を保持すればよいので、第1保持手段及び第2保持手段の記憶容量を削減することができる。
【0026】
また、前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、前記固体撮像装置は、さらに、前記第1映像信号の画像と、前記第2映像信号の画像との列方向の画素のズレを示す値であるズレ値を保持するズレ値保持手段を備え、前記視差算出手段は、前記第1保持手段が保持する前記第1映像信号及び前記第2映像信号のうち一方の前記ズレ値に応じた行と、前記第1保持手段が保持する前記第1映像信号及び前記第2映像信号のうち他方とから視差を算出してもよい。
【0027】
この構成によれば、ズレ値保持手段が保持するズレ値に応じて、視差算出手段は、撮像部が出力する第1映像信号と第2映像信号との列方向のズレを補正することができる。よって、第1映像信号と第2撮像信号とのエピポーラ性を向上させることができる。
【0028】
また、前記撮像部は、前記第1光電変換素子の行を選択する第1行選択手段と、前記第2光電変換素子の行を選択する第2行選択手段とを備え、前記出力手段は、前記第1行選択手段により行選択された前記第1光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を前記第1映像信号として出力し、前記第2行選択手段により選択された前記第2光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を前記第2映像信号として出力し、前記固体撮像装置は、さらに、前記ズレ値保持手段が保持する前記ズレ値に応じた行から前記第1行選択手段又は前記第2行選択手段による行の選択を開始させる行制御手段を備えてもよい。
【0029】
この構成によれば、行制御手段による第1行選択手段又は第2行選択手段が行選択を開始する行を変更するだけの容易な制御で、第1映像信号と第2映像信号との列方向のズレを補正することができる。
【0030】
また、前記固体撮像装置は、さらに、前記第1映像信号及び前記第2映像信号から、前記ズレ値を算出するズレ値算出手段を備え、前記ズレ値保持手段は、前記ズレ値算出手段が算出した前記ズレ値を保持してもよい。
【0031】
この構成によれば、製品出荷後の、任意のタイミング(電源投入時、所定の時間毎、又は外部操作に応じたタイミング等)で、ズレ値を算出し、算出したズレ値に応じた補正を行うことができる。これにより、設置環境等による動作条件の変化、及び経時変化等により特性(ズレ値)が変化した場合にも、最適な補正を行うことができる。
【0032】
また、前記出力手段は、各列の前記光電変換素子が光電変換した信号電荷を、それぞれデジタル信号に変換し前記第1映像信号又は前記第2映像信号として出力する複数の変換手段を備えてもよい。
【0033】
この構成によれば、各行の光電変換素子に蓄積された信号電荷を同時にデジタル信号に変換し(A/D変換し)、出力することができる。よって、映像信号の読出しを高速に行うことができる。
【0034】
また、前記第1保持手段は、少なくともm行の前記第1映像信号及び前記第2映像信号を保持してもよい。
【0035】
この構成によれば、第1保持手段及び第2保持手段の記憶容量を削減することができる。これにより、固体撮像装置の小型化及びコスト低減を行うことができる。
【0036】
また、前記第1保持手段は、少なくとも2×m行の前記第1映像信号及び前記第2映像信号を保持し、前記第2保持手段は、m行単位の少なくとも2×m行の前記視差算出手段が算出した前記視差を保持し、前記視差算出手段は、前記2×m行のうち一方のm行の前記第1映像信号及び前記第2映像信号と、該m行の第1映像信号及び第2映像信号に対応するm行の視差とが出力されている間に、前記2×m行のうち他方のm行の前記第1映像信号及び前記第2映像信号から、m行の視差を算出してもよい。
【0037】
この構成によれば、第1保持手段及び第2保持手段の記憶容量を削減することができる。これにより、固体撮像装置の小型化及びコスト低減を行うことができる。さらに、一方のm行の視差を算出している間に、他方のm行の映像信号(第1映像信号及び第2映像信号)と距離情報とを出力することができる。これにより、フレームレートを高めることができる。
【0038】
また、前記算出手段は、さらに、前記第2保持手段が保持する前記視差と、所定の範囲とを比較し、前記視差が所定の範囲に含まれない場合には、該視差に対応する前記第1映像信号及び前記第2映像信号を所定の画像に置き換えて出力する置き換え手段を備えてもよい。
【0039】
この構成によれば、視差の値が所定の範囲外の場合(例えば、被写体が離れている場合)には、対応する画像を黒塗り等に置き換えることで、所定の距離内の対象物(被写体)のみが表示された画像が出力される。
【0040】
また、前記第1のフィルタ及び前記第2のフィルタは、誘電体で構成される第1誘電体層及び第2誘電体層と、前記第1誘電体層と前記第2誘電体層との間に形成される絶縁体で構成される絶縁体層とを備え、前記絶縁体層の光学膜厚は、前記第1誘電体層及び前記第2誘電体層の光学膜厚と異なってもよい。
【0041】
この構成によれば、第1のフィルタ及び第2のフィルタに、耐光性及び耐熱性に優れた多層膜干渉フィルタが用いられる。これにより、無機材料のみを用いてフィルタを構成することができる。フィルタを無機材料のみで構成することで、高温及び高照射下で使用しても退色現象を生じない。よって、車載用途として車両の外部、エンジンルーム内又は車室内等の場所にも搭載することができる。
【0042】
また、前記固体撮像装置は、さらに、前記第1周波数帯域及び前記第2周波数帯域を含む周波数帯域の光を被写体に照射する光源を備えてもよい。
【0043】
この構成によれば、光源が被写体に照射した光の反射光を撮像部で受光することができる。これにより、夜間及び暗所での撮像を行うことができる。
【0044】
また、前記第1周波数帯域及び前記第2周波数帯域は、近赤外領域に含まれてもよい。
この構成によれば、近赤外領域の光を用いて、被写体の撮像を行うことができる。これにより、車載カメラ等として本発明の固体撮像装置を用いた場合に、視認性の向上と、対向車両及び歩行者に対する眩惑の防止とを実現することができる。
【0045】
また、本発明に係るカメラは、前記固体撮像装置を備える。
この構成によれば、撮像部が出力する第1映像信号と第2映像信号とのエピポーラ性が向上することにより、撮像部が出力する第1映像信号及び第2映像信号から、撮像した被写体への距離を容易かつ高精度に算出することができる。よって、高精度の距離情報を算出できるカメラを実現することができる。
【0046】
また、本発明に係る車両は、前記カメラを備える。
この構成によれば、撮像部が出力する第1映像信号と第2映像信号とのエピポーラ性が向上することにより、撮像部が出力する第1映像信号及び第2映像信号から、撮像した被写体への距離を容易かつ高精度に算出することができる。よって、高精度の距離情報を算出できるカメラを備える車両を実現することができる。
【0047】
また、本発明に係る監視装置は、前記カメラを備える。
この構成によれば、撮像部が出力する第1映像信号と第2映像信号とのエピポーラ性が向上することにより、撮像部が出力する第1映像信号及び第2映像信号から、撮像した被写体への距離を容易かつ高精度に算出することができる。よって、高精度の距離情報を算出できるカメラを備える監視装置を実現することができる。
【発明の効果】
【0048】
本発明は、高いエピポーラ性と、2つのカメラの撮像特性の同一性と、信号出力タイミングの同期性とを実現することができる固体撮像装置を提供することができる。
【発明を実施するための最良の形態】
【0049】
以下、本発明に係る固体撮像装置の実施の形態について、図面を参照しながら詳細に説明する。
【0050】
(実施の形態1)
本発明の実施の形態1に係る固体撮像装置は、単一の撮像領域で撮像した2つの映像信号から、被写体までの距離の情報を算出する。これにより、個別の撮像領域で撮像した2つの映像信号を用いる場合に比べ、2つの映像信号の位置的なばらつきを低減することができる。よって、2つの映像信号のエピポーラ性を向上させることができる。
【0051】
まず、本実施の形態に係る固体撮像装置の構成を説明する。
図1は、本発明の実施の形態1に係る固体撮像装置の構成を示す図である。
【0052】
図1に示す固体撮像装置100は、撮像の被写体160の映像情報及び距離情報を出力する。固体撮像装置100は、例えば、車両に搭載された近赤外領域の光(以下、「近赤外光」と記す。)を用いた暗視機能を有するカメラである。固体撮像装置100は、撮像領域110と、信号処理部120と、制御部130と、光源140と、レンズ150及び151とを備える。
【0053】
光源140は、近赤外光(波長700nm〜1100nm)を被写体160に照射する。光源140は、例えば、LED(発光ダイオード)又は半導体レーザで構成される。
【0054】
レンズ150及び151は、被写体160からの反射光を撮像領域110に集光する。レンズ151は、レンズ150と水平方向に離間して設けられる。
【0055】
撮像領域110は、CMOSイメージセンサであり、入射光に応じた映像信号を出力する。撮像領域110被写体160からの反射光を電気信号に変換し、変換した電気信号を2つの映像信号(左画像及び右画像)として出力する。具体的には、撮像領域110は、レンズ150で集光された光を電気信号に変換し、変換した電気信号を左画像として出力する。撮像領域110は、レンズ151で集光された光を電気信号に変換し、変換した電気信号を右画像として出力する。
【0056】
図2は、撮像領域110及び信号処理部120の構成を示す図である。撮像領域110は、複数の光電変換素子111と、垂直走査部112と、水平走査部113と、A/D変換部114とを備える。
【0057】
複数の光電変換素子111は、半導体基板上に行列状に配置される。複数の光電変換素子111は、受光量に応じた信号電荷を蓄積する。複数の光電変換素子111は、第1撮像領域115又は第2撮像領域116に含まれる。例えば、第1撮像領域115に含まれる光電変換素子111と、第2撮像領域116に含まれる光電変換素子111とは、同数である。第1撮像領域115に含まれる複数の光電変換素子111は、レンズ150で集光された光を光電変換する。第2撮像領域116に含まれる複数の光電変換素子111は、レンズ151で集光された光を光電変換する。なお、行列状に配置される複数の光電変換素子111の行方向は水平方向に対応し、列方向は垂直方向に対応する。
【0058】
垂直走査部112は、複数の光電変換素子111のうち各行に対応する光電変換素子111を順次選択する。
【0059】
水平走査部113は、複数の光電変換素子111のうち各列に対応する光電変換素子111を順次選択する。
【0060】
A/D変換部114は、垂直走査部112により行を選択され、かつ水平走査部113に列を選択された光電変換素子111に蓄積された信号電荷を、電圧又は電流に変換し、変換した電圧又は電流を映像信号として出力する。すなわち、A/D変換部114は、光電変換素子111に蓄積された信号電荷に基づくアナログ信号を、デジタル信号に変換し映像信号として出力する。また、A/D変換部114が出力する映像信号は、第1撮像領域115に含まれる光電変換素子111に蓄積された信号電荷を電圧又は電流に変換した左画像に対応する映像信号と、第2撮像領域116に含まれる光電変換素子111に蓄積された信号電荷を電圧又は電流に変換した右画像に対応する映像信号とが含まれる。
【0061】
制御部130は、撮像領域110及び信号処理部120を制御する。具体的には、制御部130は、垂直走査部112の行の選択を開始させる垂直同期信号と、水平走査部113の列の選択を開始させる水平同期信号と、垂直走査部112の駆動タイミングを制御する電荷蓄積制御信号とを生成する。電荷蓄積制御信号は、複数の光電変換素子111の電荷蓄積時間(露光時間)を制御するための信号である。
【0062】
信号処理部120は、被写体までの距離情報を、撮像領域110が出力する左画像と右画像とから算出し、映像信号121及び距離情報122を外部に出力する。信号処理部120は、映像信号保持部123と、距離情報算出部124と、距離情報保持部125とを備える。
【0063】
映像信号保持部123は、撮像領域110が出力する映像信号である左画像及び右画像を保持する。また、映像信号保持部123は、保持する映像信号121を外部に出力する。
【0064】
距離情報算出部124は、映像信号保持部123が保持する左画像及び右画像から、被写体までの距離情報である視差を算出する。
【0065】
距離情報保持部125は、距離情報算出部124が算出した距離情報(視差)を保持する。また、距離情報保持部125は、保持する距離情報122を外部に出力する。
【0066】
図3は、撮像領域110の断面構造を模式的に示す図である。図3に示すように、固体撮像装置100は、さらに、フィルタ152、153及び157と。ミラー154及び155と、ダイクロックミラー156とを備える。フィルタ152、153及び157は、例えば、多層膜干渉フィルタである。
【0067】
被写体160からの反射光は、フィルタ152、レンズ150、ミラー154、ダイクロックミラー156及びフィルタ157からなる光入射経路により、撮像領域110に入射される。また、被写体160からの反射光は、フィルタ153、レンズ151、ミラー155、ダイクロックミラー156及びフィルタ157からなる光入射経路により、撮像領域110に入射される。
【0068】
フィルタ152は、レンズ150の上部に形成され、第1の周波数帯域の光のみを透過する。フィルタ153は、レンズ151の上部に形成され、第1の周波数帯域と異なる第2の周波数帯域の光のみを透過する。ミラー154は、レンズ150が集光した光をダイクロックミラー156に反射する。ミラー155は、レンズ151が集光した光をダイクロックミラー156に反射する。ダイクロックミラー156は、ミラー154及びミラー155からの光を撮像領域110に反射する。すなわち、フィルタ152及びレンズ150により、第1の周波数帯域の光が集光される。フィルタ153及びレンズ151により、第2の周波数帯域の光が集光される。ミラー154、155及びダイクロックミラー156により、集光された第1の周波数帯域の光及び第2の周波数帯域の光が撮像領域110に入射される。フィルタ157は、撮像領域110上に形成される。ここで、第1の周波数帯域及び第2の周波数帯域は、近赤外領域(波長700nm〜1100nm)内の、互いに重複しない異なる周波数帯域である。例えば、第1の周波数帯域は、波長750nm〜850nmの周波数帯域であり、第2の周波数帯域は、波長950nm〜1050nmの周波数帯域である。
【0069】
図4は、フィルタ157を上面から見た構成を模式的に示す図である。フィルタ157は、第1の周波数帯域の光のみを透過する第1のフィルタ158と、第2の周波数帯域の光のみを透過する第2のフィルタ159とを含む。第1のフィルタ158は、第1撮像領域115に含まれる光電変換素子111上に形成される。第2のフィルタ159は、第2撮像領域116に含まれる光電変換素子111上に形成される。例えば、図4(a)に示すように、第1のフィルタ158と第2のフィルタ159とは、行列状に配置された複数の光電変換素子111が形成される領域を列方向(垂直方向)に分割するように配置される。具体的には、第1のフィルタ158は、行列状に配置される複数の光電変換素子111のうち上半分の行(6×6画素の場合は、上方向の3行)の光電変換素子111上に形成される。また、第2のフィルタ159は、行列状に配置される複数の光電変換素子111のうち下半分の行(6×6画素の場合は、下方向の3行)の光電変換素子111上に形成される。
【0070】
図5は、フィルタ152の断面構造を模式的に示す図である。なお、フィルタ153及び157の断面構造も図5と同様である。
【0071】
図5(a)に示すフィルタ152は、上部反射層161と、スペーサ層162と、下部反射層163とを備える。スペーサ層162は下部反射層163上に積層され、上部反射層161は、スペーサ層162上に積層される。
【0072】
上部反射層161及び下部反射層163は、3層の高屈折率材料で構成される層164と、3層の低屈折率材料で構成される層165とを、交互に積層した構造である。高屈折率材料で構成される層164は、例えば、酸化チタンTiO2(屈折率2.5)で構成される。低屈折率材料で構成される層165は、例えば、酸化シリコンSiO2(屈折率1.45)で構成される。スペーサ層162は、高屈折率材料で構成され、例えば、酸化チタンTiO2(屈折率2.5)で構成される。また、フィルタ152は、スペーサ層162を中心にして、光学膜厚λ/4(λ:設定中心波長)の多層膜構造の上部反射層161及び下部反射層163が対称となるように配置される。このような層構造により、反射帯域中に透過帯域領域が選択的に形成され、さらにスペーサ層162の膜厚を変化させることによって、その透過ピーク波長を変化させることができる。
【0073】
図6は、図5(a)に示すフィルタ152の光の波長に対する光の透過率の計算結果を示す図である。なお、透過率の計算には誘電体多層膜干渉フィルタにおいて広く知られている特性マトリクス法を用いた。図6に示すように、例えば、TiO2層164を90nmとし、SiO2層165を155nmとすることで、実線174で示す特性の設定中心波長900nmの多層膜干渉フィルタを構成することができる。また、TiO2層164を99nmとし、SiO2層165を171nmとすることで、破線175で示す設定中心波長1000nmの多層膜干渉フィルタを構成することができる。ここで、スペーサ層162は、光学膜厚をλ/2としている。また、図6に示すように、図5(a)に示すフィルタ152は、短波長帯(波長800nm以下)の光を透過する特性を有するが、短波長カット光学フィルタ(例えば朝日分光(株)LIO840等:図6の二点鎖線176)を併用することで、波長900nm又は1000nmの光のみを透過することができる。
【0074】
なお、フィルタ152の構成は、図5(b)に示すように、所定の膜厚及び層数のTiO2層とSiO2層とを積層した、上部反射層166と、スペーサ層167と、下部反射層168とを構成してもよい。
【0075】
図7は、図5(b)に示すフィルタ152の光の波長に対する光の透過率の計算結果を示す図である。図7に示すように、上部反射層166と、スペーサ層167と、下部反射層168との膜厚及び層数を最適化することにより、実線177で示す特性の設定中心波長800nmの多層膜干渉フィルタ及び破線178で示す設定中心波長1000nmの多層膜干渉フィルタを構成することができる。
【0076】
なお、高屈折率材料で構成される層164は、酸化チタンTiO2で構成されるとしたが、窒化シリコン(SiN)、酸化タンタル(Ta2O5)、又は酸化ジルコニウム(ZrO2)等で構成してもよい。また、低屈折率材料で構成される層165は、酸化シリコンSiO2で構成されるとしたが用いたが、高屈折率材料として用いる誘電体と比較して屈折率が低ければ、酸化シリコンSiO2以外の材料を用いてもよい。
【0077】
また、上述した設定中心波長、スペーサ層の膜厚、ペア数は1例であり、所望の分光特性に合わせて設定すればよい。
【0078】
このように、誘電体多層膜干渉フィルタを用いることで、フィルタを通常の半導体プロセスで作製可能となり、従来の顔料フィルタのように固体撮像装置の受光部や配線部などを形成した後に、通常の半導体プロセスとは異なる工程、いわゆるオンチッププロセスでフィルタを形成する必要がない。よって、プロセスの安定化、及び生産性向上に伴う低コスト化を実現することができる。
【0079】
さらに、誘電体多層膜干渉フィルタを用いることにより、無機材料のみを用いてフィルタを構成することができる。これにより、高温及び高照射下で使用しても退色現象を生じないことから、車載用途として車両の外部、エンジンルーム内又は車室内等の場所にも搭載することができる。
【0080】
次に、本実施の形態に係る固体撮像装置100の動作を説明する。
光源140から照射された近赤外光は、被写体160で反射される。被写体160で反射した反射光は、フィルタ152により第1の周波数帯域の光のみが透過し、レンズ150で集光され、ミラー154で反射され、ダイクロックミラー156で反射され、フィルタ157を介して撮像領域110に照射される。撮像領域110に照射される第1の周波数帯域の光は、第1のフィルタ158を透過し、第1撮像領域115の光電変換素子111に入射する。また、被写体160で反射した反射光は、フィルタ153により第2の周波数帯域の光のみが透過し、レンズ151で集光され、ミラー155で反射され、ダイクロックミラー156で反射され、フィルタ157を介して撮像領域110に照射される。撮像領域110に照射される第2の周波数帯域の光は、第2のフィルタ159を透過し、第2撮像領域116の光電変換素子111に入射する。このように、撮像領域110上に第1のフィルタ158及び第2のフィルタ159を含むフィルタ157を備えることにより、フィルタ152を介してレンズ150で集光された第1の周波数帯域の光は、第2のフィルタ159で遮断されるので第2撮像領域116には入射せず第1撮像領域115にのみ入射する。また、フィルタ153を介してレンズ151で集光された第2の周波数帯域の光は、第1のフィルタ158で遮断されるので第1撮像領域115には入射せず第2撮像領域116にのみ入射する。すなわち、本発明の実施の形態1に係る固体撮像装置100は、第1撮像領域115及び第2撮像領域116に入射する光の干渉を防止することができる。また、フィルタ152、153及び157を備えることで、遮光板等を設けなくともよいので、構造を簡略化することができる。これにより、単一のCMOSイメージセンサで、2つのレンズから入射した光を互いに干渉させることなく容易に撮像することができる。
【0081】
第1撮像領域115に含まれる複数の光電変換素子111は、レンズ150で集光された第1の周波数帯域の光の入射光量に応じた信号電荷を蓄積する。第2撮像領域116に含まれる複数の光電変換素子111は、レンズ151で集光された第2の周波数帯域の光の入射光量に応じた信号電荷を蓄積する。制御部130は、垂直走査部112の行の選択を開始させる垂直同期信号と、水平走査部113の列の選択を開始させる水平同期信号と、垂直走査部112の駆動タイミングを制御する電荷蓄積制御信号とを生成する。垂直走査部112は、制御部130からの垂直同期信号により、行列状に配置された光電変換素子111の行を順次選択する。水平走査部113は、制御部130からの水平同期信号により、行列状に配置された光電変換素子111の列を順次選択する。A/D変換部114は、垂直走査部112により行を選択され、かつ水平走査部113に列を選択された光電変換素子111に蓄積された信号電荷を順次デジタル信号に変換し、デジタル化した映像信号を出力する。
【0082】
このように、本発明の実施の形態1に係る固体撮像装置100は、単一のCMOSイメージセンサで撮像した2つの映像信号(左画像及び右画像)を出力する。これにより、異なるCMOSイメージセンサで撮像した映像信号に比べて、ばらつきを低減し、エピポーラ性と、撮像特性の同一性と、信号出力タイミングの同期性とを向上させることができる。ここで、エピポーラ性が高いとは、2つの映像信号の垂直方向の位置的なずれ(差分)が少ないことを意味する。
【0083】
図8は、撮像領域110が出力する映像信号の画像の一例を示す図である。図8において、画像171a及び171bは、第1撮像領域115で撮像された左画像であり、画像172a及び172bは、第2撮像領域116で撮像された右画像である。例えば、被写体160を撮像した場合、撮像領域110は、図8(a)に示す画像171a及び172aを出力する。
【0084】
映像信号保持部123は、撮像領域110が出力した左画像の映像信号及び右画像の映像信号を保持する。距離情報算出部124は、映像信号保持部123が保持する左画像の映像信号及び右画像の映像信号から、被写体160の距離情報を算出する。
【0085】
図9は、図8(a)に示す画像に対する距離情報算出部124の処理を説明するための図である。距離情報算出部124は、左画像171aと、右画像172aから被写体160の視差dを算出する。視差dは、左画像171aと、右画像172aにおける被写体160の水平方向のズレ(差分)である。例えば、距離情報算出部124は、左画像171aと、右画像172aの各行のデータを比較し、一致するか否かを判定する。次に、右画像172aの各行のデータを右側にシフトさせ、シフトさせたデータが左画像171aと一致するか否かを判定する。右画像172aの各行のデータを右側にシフトする動作及び左画像171aと一致を判定する処理を繰り返す。信号処理部120は、各行の左画像171aと右画像172aがもっとも類似したときの右画像172aのシフト数を視差dとして算出する。具体的には、距離情報算出部124は、映像信号保持部123が保持する左画像のm行(m:1以上の整数)の画素を行方向に所定の画素分ずらす処理を所定の回数繰り返す。距離情報算出部124は、所定の回数の処理毎に、ずらしたm行の左画像と、映像信号保持部123が保持する右画像のm行とに含まれる各画素の信号レベルの差分の絶対値を算出する。距離情報算出部124は、所定の回数の処理毎に、算出した差分の絶対値、n列(n:1以上の整数)毎の和を算出する。距離情報算出部124は、所定の回数の前記処理毎に、算出した和が、距離情報保持部125が保持している和より小さい場合に、算出した和と、ずらし処理が実行された回数とを距離情報保持部125に保持する。距離情報保持部125は、距離情報算出部124による所定の回数のずらし処理が終了した後に、保持する処理が実行された回数を、視差として外部に出力する。例えば、距離情報算出部124のずらし処理によるずらし量(通常1画素)をn画素とし、ずらし処理が実行された回数をN回とし、画素ピッチをPxとした場合には、視差ZはZ=n×N×Pxで算出される。なお、距離情報算出部124のずらし処理によるずらし量は、外部からの入力により設定されてもよい。これにより、任意のずらし量を設定し、視差の精度及び処理時間を任意に設定することができる。
【0086】
以下に、信号処理部120の具体的な動作を説明する。
図10は、撮像領域110の左画像及び右画像の光電変換に用いられる光電変換素子111の配置の一例を示す図である。図10に示すように、12行×12列の光電変換素子111に対し、左画像を撮像する第1撮像領域115と、右画像を撮像する第2撮像領域116とが、2行毎に交互に配置された場合の信号処理部120の動作を説明する。図10に示すように、複数の光電変換素子111の第1行及び第2行が、第2撮像領域116の第1行及び第2行に対応し、複数の光電変換素子111の第3行及び第4行が、第1撮像領域115の第1行及び第2行に対応し、複数の光電変換素子111の第5行及び第6行が、第2撮像領域116の第3行及び第4行に対応し、複数の光電変換素子111の第7行及び第8行が、第1撮像領域115の第3行及び第4行に対応し、複数の光電変換素子111の第9行及び第10行が、第2撮像領域116の第5行及び第6行に対応し、複数の光電変換素子111の第11行及び第12行が、第1撮像領域115の第5行及び第6行に対応する。
【0087】
まず、A/D変換部114は、右画像の第1行(複数の光電変換素子111の第1行)に対応する光電変換素子111の蓄積電荷をA/D変換し、映像信号保持部123に保持する。次に、A/D変換部114は、右画像の第2行(複数の光電変換素子111の第2行)に対応する光電変換素子111の蓄積電荷をA/D変換し、映像信号保持部123に保持する。次に、A/D変換部114は、左画像の第1行(複数の光電変換素子111の第3行)に対応する光電変換素子111の蓄積電荷をA/D変換し、映像信号保持部123に保持する。次に、A/D変換部114は、右画像の第2行(複数の光電変換素子111の第4行)に対応する光電変換素子111の蓄積電荷をA/D変換し、映像信号保持部123に保持する。
【0088】
次に、距離情報算出部124は、映像信号保持部123が保持する右画像及び左画像の第1行及び第2行の映像信号から、視差を算出する。
【0089】
図11は、信号処理部120による視差の算出の処理の流れを示すフローチャートである。図12及び図13は、距離情報算出部124による、視差の算出処理を説明するための図である。図12(a)に示すような右画像及び左画像の映像信号が読み出され、映像信号保持部123に保持された場合について説明する。なお、図中の枠内の数値は、映像信号の信号レベルを示し、例えば、入射光の輝度に対応した値である。
【0090】
距離情報算出部124は、例えば、2行の映像信号の12列の映像信号を4列毎の3つの領域A、B及びCに分割し、それぞれの領域に対して、視差を算出する。すなわち、距離情報算出部124は、2行×4列の画素毎に視差を算出する。まず、距離情報算出部124は、図13(a)に示すように、左画像の各画素の信号レベル301と、右画像の各画素の信号レベル302の差分の絶対値303を算出する(S101)。次に、距離情報算出部124は、各領域A、B及びCにおける差分の絶対値303の合計値304を算出する(S102)。例えば、図13(a)に示すように、各領域A、B及びCの合計値304として「6」、「14」及び「14」が算出される。距離情報算出部124は、算出した合計値304を距離情報保持部125に保持する(S103)。
【0091】
図14は、信号処理部120の視差の算出処理において、距離情報保持部125に保持されるデータの一例を示す図である。距離情報算出部124により、図13(a)に示す合計値304が算出された場合、距離情報保持部125に、図14(a)に示すクロック数311として「0」が保持され、各領域A、B及びCの合計値304の最小値312として「6」、「14」及び「14」が保持される。ここで、クロック数311は、左画像のシフト動作が行われた回数に対応する。
【0092】
次に、距離情報算出部124は、図12(b)に示すように、左画像を左方向(又は右画像を右方向)に1画素シフトさせる(S104)。距離情報算出部124は、右画像と、シフトさせた左画像との差分の絶対値を算出する(S105)。距離情報算出部124は、各領域A、B及びCにおける差分の絶対値303の合計値304を算出する(S106)。例えば、図13(b)に示すように、各領域A、B及びCの合計値304として「8」、「20」及び「20」が算出される。
【0093】
次に、距離情報算出部124は、距離情報保持部125に保持される各領域A、B及びCの合計値の最小値312(図14(a))と、算出した合計値304とを比較する。算出した各領域の合計値「8」、「20」及び「20」は、距離情報保持部125に保持される各領域の合計値「6」、「14」及び「14」より大きいので(S107でNo)、距離情報算出部124は、距離情報保持部125に保持されるクロック数311及び差分の合計値の最小値312を変更せずに、保持する。よって、距離情報保持部125には、図14(a)に示すクロック数311及び差分の合計値の最小値312が保持される(図14(b))。
【0094】
次に、距離情報算出部124は、所定の回数のシフト動作が行われたか否かを判定する。なお、ここでは、所定の回数が「4」の場合について説明する。シフト回数は「1」であり所定の回数(4回)のシフト動作が行われていないので(S109でNo)、距離情報算出部124は、図12(c)に示すように、左画像を左方向に1画素シフトさせる(S104)。距離情報算出部124は、右画像と、シフトさせた左画像との差分の絶対値を算出する(S105)。距離情報算出部124は、各領域A、B及びCにおける差分の絶対値303の合計値304を算出する(S106)。例えば、図13(c)に示すように、各領域A、B及びCの合計値304として「0」、「14」及び「20」が算出される。
【0095】
次に、距離情報算出部124は、距離情報保持部125に保持される各領域A、B及びCの合計値の最小値312(図14(b))と、算出した合計値304とを比較する。算出した領域Aの合計値「0」は、距離情報保持部125に保持される領域Aの合計値「6」より小さいので(S107でYes)、距離情報算出部124は、距離情報保持部125に保持される領域Aのクロック数311を、現在のクロック数(シフト回数)「2」に更新し、差分の合計値の最小値312を算出した合計値「0」に更新する。また、算出した領域Bの合計値「14」は、距離情報保持部125に保持される領域Bの合計値「14」と等しく、算出した領域Cの合計値「20」は、距離情報保持部125に保持される領域Cの合計値「14」より大きいので(S107でNo)、距離情報算出部124は、距離情報保持部125に保持される領域B及びCのクロック数311及び差分の合計値の最小値312を変更せずに、保持する。よって、距離情報保持部125には、図14(c)に示すクロック数311及び差分の合計値の最小値312が保持される。なお、距離情報算出部124が算出した合計値304と、距離情報保持部125に保持される合計値の最小値312が等しい場合に、距離情報保持部125に保持されるクロック数311を更新してもよい。
【0096】
シフト回数は「2」であり、所定の回数(4回)のシフト動作が行われていないので(S109でNo)、距離情報算出部124は、図12(d)に示すように、左画像を左方向に1画素シフトさせる(S104)。距離情報算出部124は、右画像と、シフトさせた左画像との差分の絶対値を算出する(S105)。距離情報算出部124は、各領域A、B及びCにおける差分の絶対値303の合計値304を算出する(S106)。例えば、図13(d)に示すように、各領域A、B及びCの合計値304として「8」、「0」及び「0」が算出される。
【0097】
次に、距離情報算出部124は、距離情報保持部125に保持される各領域A、B及びCの合計値の最小値312(図14(c))と、算出した合計値304とを比較する。算出した領域Aの合計値「8」は、距離情報保持部125に保持される領域Aの合計値「0」より大きいので(S107でNo)、距離情報算出部124は、距離情報保持部125に保持される領域Aのクロック数311及び差分の合計値の最小値312を変更せずに、保持する。また、算出した領域B及びCの合計値「0」及び「0」は、距離情報保持部125に保持される領域B及びCの合計値「14」及び「14」より小さいので(S107でYes)、距離情報算出部124は、距離情報保持部125に保持される領域B及びCのクロック数311を、現在のクロック数(シフト回数)を「3」に更新し、差分の合計値の最小値312を算出した合計値「0」に更新する。よって、距離情報保持部125には、図14(d)に示すクロック数311及び差分の合計値の最小値312が保持される。
【0098】
シフト数は「3」であり、所定の回数(4回)のシフト動作が行われていないので(S109でNo)、距離情報算出部124は、図12(e)に示すように、左画像を左方向に1画素シフトさせる(S104)。距離情報算出部124は、右画像と、シフトさせた左画像との差分の絶対値を算出する(S105)。距離情報算出部124は、各領域A、B及びCにおける差分の絶対値303の合計値304を算出する(S106)。例えば、図13(e)に示すように、各領域A、B及びCの合計値304として「13」、「20」及び「10」が算出される。
【0099】
次に、距離情報算出部124は、距離情報保持部125に保持される各領域A、B及びCの合計値(図14(d))と、算出した合計値304とを比較する。算出した各領域の合計値「13」、「20」及び「10」は、距離情報保持部125に保持される各領域の合計値「0」、「0」及び「0」より大きいので(S107でNo)、距離情報算出部124は、距離情報保持部125に保持される各領域のクロック数311及び差分の合計値の最小値312を変更せずに、保持する。よって、距離情報保持部125には、図14(e)に示すクロック数311及び差分の合計値の最小値312が保持される。
【0100】
シフト数は「4」であり、所定の回数(4回)のシフト動作が行われたので(S109でYes)、距離情報保持部125は、保持するクロック数311を、視差として出力する。
【0101】
次に、信号処理部120は、右画像及び左画像の第3行及び第4行の映像信号を読出し、読出した映像信号に対して同様の視差算出処理を行う。さらに、信号処理部120は、右画像及び左画像の第5行及び第6行の映像信号を読出し、読出した映像信号に対して同様の視差算出処理を行う。
【0102】
以上の処理により、信号処理部120は、右画像及び左画像から2行×4列の画素毎に視差を算出し出力する。ここで、信号処理部120において、2行毎に視差を算出する場合には、図10に示すように2行毎に、右画像及び左画像に用いる光電変換素子111を配置することで、読み出した映像信号に対して、順次視差の算出処理を行うことができる。よって、信号処理部120による視差の算出処理を遅延なく高速に行うことができる。
【0103】
さらに、読み出した映像信号に対して順次視差の算出処理を行い、映像信号及び視差を算出することで、映像信号保持部123の記憶容量を削減することができる。すなわち、映像信号保持部123は、少なくとも距離情報算出部124による視差の算出単位(上記例では2行)の右画像及び左画像のデータを保持すればよい。また、距離情報保持部125は、少なくとも距離情報算出部124による視差の算出単位(上記例では2行)の視差を保持すればよい。なお、映像信号保持部123は、複数の視差の算出単位(例えば、視差算出単位の2倍)の右画像及び左画像のデータを保持し、距離情報保持部125は、複数の視差算出単位の視差を保持してもよい。これにより、距離情報算出部124は、映像信号保持部123に保持されている2行分の右画像及び左画像の映像信号と、距離情報保持部125に保持されている該映像信号に対応する2行分の視差とが出力されている間に、他の2行分の右画像及び左画像から、視差を算出することができる。これにより、フレームレートを高めることができる。
【0104】
なお、信号処理部120は、映像信号121及び距離情報122をパラレルに出力してもよいし、共通の端子からシリアルに出力してもよい。さらに、信号処理部120は、映像信号121及び距離情報(視差)122とを個別に出力しているが、左画像又は右画像に視差の情報を付与して出力してもよい。さらに、左画像及び右画像を合成して出力してもよい。さらに、信号処理部120は、算出した視差とから固体撮像装置100から被写体160への距離を算出し、距離情報122として出力してもよい。
【0105】
また、上記説明では、12行×12列の光電変換素子111が配置された場合について説明したが、光電変換素子111の数(画素数)は、これに限定されるものではない。
【0106】
また、上記説明では、2行×4列の画素毎に、視差を算出する例について説明したが、視差を算出する画素の範囲は、これに限定されるものではない。また、m行×n列(m及びnは、1以上の整数)の画素毎に視差を算出する場合には、第1撮像領域及び第2撮像領域の配置を、m行毎のストライプ状にすることで、視差の算出処理を遅延なく高速に行うことができる。
【0107】
また、上記説明では、ステップS101及びS105において、左画像と右画像との各画素の信号レベルの差分の絶対値を算出し、ステップS102及びS106において、各画素の差分の合計値を算出しているが、以下の処理に置き換えてもよい。各領域A、B及びC毎に、左画像の複数の画素の信号レベルを加算し、上述した信号レベル301に置き換える。右画像も同様に、各領域A、B及びC毎に、複数の画素の信号レベルを加算し、上述した信号レベル302に置き換える。各領域A、B及びC毎に、差分の絶対値を算出し、上述した合計値304に置き換えて、その後、同様の処理を行ってもよい。これにより、細密な高画素の撮像素子を用いた場合に、一定の距離情報の精度を保ちながら計算処理量を削減することができる。
【0108】
また、上記説明では、ステップS104において1画素ずつシフトさせる処理を行ったが複数画素ずつシフトさせる処理を行ってもよい。
【0109】
ここで、図8(b)に示すように、左画像171bと、右画像172bとが垂直方向にズレが生じている(エピポーラ性が悪い)場合、一致を比較する各行において、ズレにより画像が一致しないため、距離情報算出部124の視差dの算出処理における精度が低下する。本発明の実施の形態1に係る固体撮像装置100では、上述したように、単一のCMOSイメージセンサで右画像と左画像とを撮像することで、右画像と左画像との水平方向及び垂直方向のズレを低減することができる。これにより、視差dの算出精度を向上させることができる。また、撮像面において高いエピポーラ性が得られるとともに、右画像及び左画像の光電変換特性も同じであるため視差dを精度高く容易に算出することができる。
【0110】
また、本発明の実施の形態1に係る固体撮像装置100において、図4(a)に示すように、フィルタ157は、複数の光電変換素子111が配置される領域を水平方向に二分する第1のフィルタ158及び第2のフィルタ159を含む。これにより、複数の光電変換素子111が配置される領域を垂直方向に分割するように第1のフィルタ158及び第2のフィルタ159を形成する場合に比べて、撮像領域110が出力する左画像及び右画像の水平方向の画素数を増加させることができる。ここで、距離情報算出部124による視差dの算出処理において、視差dの算出に用いる映像信号の水平方向の解像度が高いほうが、より高い精度の視差dを算出することができる。よって、撮像領域110が出力する映像信号の水平方向の画素数を増加させることで、距離情報算出部124が算出する視差dの精度を向上させることができる。なお、水平方向の解像度を増加させるためには、行列状に配置された複数の光電変換素子111の各行に、第1のフィルタ158と第2のフィルタ159とのいずれか一方のみが配置されればよい。例えば、フィルタ157の第1のフィルタ158及び第2のフィルタ159は、図4(b)に示すように、1行毎に交互に配置されてもよい。すなわち、水平方向のストライプ状であってもよい。さらに、第1のフィルタ158及び第2のフィルタ159は、複数行毎に交互に配置されてもよい。また、図4(c)に示すように、第1のフィルタ158及び第2のフィルタ159を格子状に配置してもよい。また、図4(d)に示すように、第1のフィルタ158及び第2のフィルタ159を垂直方向のストライプ状に配置してもよい。
【0111】
なお、上記説明において、フィルタ152はレンズ150の上部に形成され、フィルタ153は、レンズ151の上部に形成されるとしたが、フィルタ152はレンズ150の下部(レンズ150とミラー154との間)に形成され、フィルタ153は、レンズ151の下部(レンズ151とミラー155との間)に形成されてもよい。
【0112】
また、上記説明において、撮像領域110及び信号処理部120の構成として、図2に示す構成を説明したが、図15に示す構成としてもよい。図15は、本発明の実施の形態1に係る固体撮像装置100の撮像領域110及び信号処理部120の変形例の構成を示す図である。例えば、図15に示すように、撮像領域110は、行列状に配置された光電変換素子111の各列の光電変換素子111が光電変換した信号電荷をそれぞれデジタル信号に変換するA/D変換部117を備えてもよい。すなわち、A/D変換部117は、各行に配置された複数の光電変換素子111が光電変換した信号電荷を同時にA/D変換する機能を有する。各列の信号電荷をデジタル信号に変換するA/D変換部117を備えることにより、高速にA/D変換を行うことができる。これにより、撮像領域110からの読出し処理を高速に行うことができる。また、各行の信号電荷を同時に読み出すことができるので、信号処理部120における行単位の視差算出処理を効率よく行うことができる。
【0113】
また、上記説明において、レンズ150及び151が集光した光を撮像領域110に入射する構造として、図3に示すミラー154、155及びダイクロックミラー156とを備える構造を説明したが、レンズ150及び151が集光した光を撮像領域110に入射する構造であればよく、図3に示す構造に限定されるものではない。例えば、ダイクロックミラー156の代わりに、ミラー154で反射された光を撮像領域110上に反射するミラーと、ミラー155で反射された光を撮像領域110上に反射するミラーとを備えてもよい。
【0114】
また、上記説明では、第1の周波数帯域と、第2の周波数帯域とは、互いに重複しない異なる周波数帯域であるとしたが、第1の周波数帯域の一部と、第2の周波数帯域の一部とが重複してもよい。例えば、フィルタ152が透過する周波数帯域の透過率が50%以下の領域が、フィルタ153が透過する周波数帯域の一部に含まれてもよい。
【0115】
また、上記説明において、第1のフィルタ158は、第1の周波数帯域の光のみを透過するとしたが、第1の周波数帯域に含まれる周波数帯域のみを透過してもよい。すなわち、フィルタ152は、第1の周波数帯域(例えば、波長750nm〜850nm)の光のみを透過し、第1のフィルタ158は、第1の周波数帯域に含まれる周波数帯域(例えば、波長770nm〜830nm)の光のみを透過してもよい。さらに、第1のフィルタ158は、透過率が低い周波数帯域として、第1の周波数帯域に含まれない周波数帯域を透過してもよい。例えば、第1のフィルタ158は、透過率30%以下であれば、第1の周波数帯域(例えば、波長750nm〜850nm)に含まれない帯域を含む広帯域な周波数特性(例えば、波長700nm〜900nm)を有してもよい。
【0116】
同様に、第2のフィルタ159は、第2の周波数帯域に含まれる周波数帯域のみを透過してもよい。さらに、第2のフィルタ159は、透過率が低い周波数帯域として、第2の周波数帯域に含まれない周波数帯域を透過してもよい。
【0117】
また、上記説明において、信号処理部120は、撮像領域110で撮像された右画像及び左画像を出力するとしたが、算出した視差に基づき右画像及び左画像の一部を置き換えて出力してもよい。例えば、信号処理部120は、距離情報保持部125が保持する視差と、所定の範囲とを比較し、視差が所定の範囲に含まれない場合には、該視差に対応する右画像及び左画像を所定の画像(所定の画素信号又は固定値(黒又は白等))に置き換えて出力してもよい。これにより、視差の値が所定の範囲外の場合(例えば、被写体が離れている場合)には、対応する画像を黒塗り等に置き換えることで、所定の距離内の対象物(被写体)のみが表示された画像が出力される。
【0118】
(実施の形態2)
本発明の実施の形態2に係る固体撮像装置は、撮像領域が出力する右画像と左画像との垂直方向のずれを補正する機能を有する。これにより、右画像と左画像とに垂直方向のずれがある場合でも、高いエピポーラ性を実現し、視差の算出を高精度で行うことができる。
【0119】
まず、本発明の実施の形態2に係る固体撮像装置の構成を説明する。
図16は、本発明の実施の形態2に係る固体撮像装置の構成を示す図である。なお、図1と同様の要素には同一の符号を付しており、詳細な説明は省略する。
【0120】
図16に示す固体撮像装置200は、図1に示す固体撮像装置100に対して、撮像領域201及び制御部230の構成と、調整値算出部210及び調整値保持部220を備える点とが異なる。
【0121】
図17は、撮像領域201の構成を示す図である。撮像領域201は、複数の光電変換素子111と、第1垂直走査部211と、第2垂直走査部212と、水平走査部113と、A/D変換部114とを備える。なお、図2と同様の要素には、同一の符号を付している。
【0122】
複数の光電変換素子111は、半導体基板上に行列状に配置される。複数の光電変換素子111は、受光量に応じた信号電荷を蓄積する。複数の光電変換素子111は、第1撮像領域115又は第2撮像領域116に含まれる。第1撮像領域115に含まれる複数の光電変換素子111は、レンズ150で集光された光を光電変換する。第2撮像領域116に含まれる複数の光電変換素子111は、レンズ151で集光された光を光電変換する。
【0123】
第1垂直走査部211は、第1撮像領域115の複数の光電変換素子111のうち各行に対応する光電変換素子111を順次選択する。第2垂直走査部212は、第2撮像領域116の複数の光電変換素子111のうち各行に対応する光電変換素子111を順次選択する。
【0124】
水平走査部113は、複数の光電変換素子111のうち各列に対応する光電変換素子111を順次選択する。
【0125】
A/D変換部114は、第1垂直走査部211又は第2垂直走査部212により行を選択され、かつ水平走査部113に列を選択された光電変換素子111に蓄積された信号電荷を、電圧又は電流に変換し、変換した電圧又は電流を映像信号として出力する。具体的には、A/D変換部114は、第1垂直走査部211により行選択された第1撮像領域115に含まれる光電変換素子111が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を左画像として出力する。A/D変換部114は、第2垂直走査部212により選択された第2撮像領域に含まれる光電変換素子111が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を右画像として出力する。
【0126】
調整値算出部210は、撮像領域201が出力する右画像及び左画像から、右画像と左画像との垂直方向のズレを算出する。具体的には、調整値算出部210は、左画像に対する、右画像の垂直方向の画素のズレを示す値である調整値221を算出する。例えば、図8(b)に示す左画像171b及び右画像172bの例では、調整値算出部210は、左画像171bと右画像172bとの垂直方向のズレ173を算出する。例えば、調整値算出部210は、左画像171bと、右画像172bとの画像データからそれぞれが一致する特異点を抽出し、画素データのYアドレスの差分を調整値221として出力する。例えば、調整値算出部210は、左画像171bと、右画像172bのデータを比較し、一致するか否かを判定する。次に、調整値算出部210は、右画像172bのデータを下側にシフトさせ、シフトさせたデータが左画像171bと一致するか否かを判定する。調整値算出部210は、右画像172bのデータを下側に所定の回数シフトする動作毎に、左画像171bと一致を判定する処理を行う。次に、調整値算出部210は、下側へシフトする前の右画像172bのデータを上側にシフトさせ、シフトさせたデータが左画像171bと一致するか否かを判定する。調整値算出部210は、右画像172bのデータを上側に所定の回数シフトする動作毎に、左画像171bと一致を判定する処理を行う。所定の回数の一致判定処理の後、調整値算出部210は、最も画像が一致したシフト回数を調整値221として出力する。なお、調整値算出部210による左画像171b及び右画像172bの一致判定処理は、左画像171b及び右画像172bの所定の列毎に行ってもよい。
【0127】
調整値算出部210は、例えば、固体撮像装置200の電源投入時に上述した調整値221の算出処理を行う。なお、調整値算出部210は、所定の時間毎、又は外部からの操作に応じて、上述した調整値221の算出処理を行ってもよい。
【0128】
調整値保持部220は、調整値算出部210が算出した調整値221を保持する。
制御部230は、調整値保持部220が保持する調整値221に応じた行から、撮像領域201の第1垂直走査部211の行選択を開始させる第1行制御信号と、第2垂直走査部212の行選択を開始させる第2行制御信号とを生成する。
【0129】
次に、本発明の実施の形態2に係る固体撮像装置200の動作を説明する。
例えば、図10に示すように、12行×12列の光電変換素子111に対し、左画像を撮像する第1撮像領域115と、右画像を撮像する第2撮像領域116とが、2行毎に交互に配置された場合の動作を説明する。また、図8(b)に示すように左画像171b及び右画像172bが垂直方向にずれている場合の動作を説明する。なお、図8(b)において、左画像171bが、右画像172bより上側に2画素分ずれているとする。
【0130】
調整値算出部210は、左画像171b及び右画像172bから、左画像に対する、右画像の垂直方向の画素のズレを示す値である調整値221を算出する。図8(b)に示す例では、例えば、調整値221として「2」が算出される。調整値算出部210は、算出した調整値221を調整値保持部220に保持する。
【0131】
制御部230は、調整値保持部220が保持する調整値221の値「2」より、左画像を撮像する第1撮像領域115の行選択を行う第1垂直走査部211に、通常の行選択を開始する行(左画像の第1行)から行選択を開始させる第1行制御信号を出力する。また、制御部230は、右画像を撮像する第2撮像領域116の行選択を行う第2垂直走査部212に、通常の行選択を開始する行に補正値の値「2」を加算した行(右画像の第3行)から行選択を開始させる第2行制御信号を出力する。
【0132】
制御部230が出力する第1行制御信号及び第2行制御信号により、撮像領域201は、右画像の第3行の信号電荷に対応する映像信号を読出し、次に右画像の第4行の信号電荷に対応する映像信号を読出し、次に左画像の第1行の信号電荷に対応する映像信号を読出し、次に左画像の第2行の信号電荷に対応する映像信号を読み出す。信号処理部120は、読み出された右画像の第3行及び第4行と、左画像の第1行及び第2行とから、視差を算出する。なお、信号処理部120による視差の算出処理は、実施の形態1と同様であり、詳細な説明は省略する。
【0133】
以上の動作により、本発明の実施の形態2に係る固体撮像装置200は、撮像領域201が出力する右画像及び左画像の垂直方向のズレを算出し、算出したズレに基づき、撮像領域201の行選択を開始する行を変更する。これにより、垂直方向のズレを補正した右画像及び左画像を出力することができる。よって、右画像と左画像とのエピポーラ性を向上させ、信号処理部120が算出する視差の精度を向上させることができる。
【0134】
なお、上記説明において、撮像領域201は、図17に示すように第1垂直走査部211と第2垂直走査部212とを備えるとしたが、単一の垂直走査部が調整値221に応じて、出力する左画像及び右画像のズレがなくなるように、行を選択してもよい。
【0135】
また、上記説明において、制御部230が、調整値保持部220が保持する調整値221に応じた行から、撮像領域201の第1垂直走査部211の行選択を開始させる第1行制御信号と、第2垂直走査部212の行選択を開始させる第2行制御信号とを生成することで、ズレを補正するとしたが、信号処理部120においてズレの補正を行ってもよい。例えば、距離情報算出部124は、映像信号保持部123が保持する右画像及び左画像のうち一方の調整値221に応じた行と、映像信号保持部123が保持する右画像及び左画像のうち他方とから視差を算出してもよい。すなわち、距離情報算出部124は、右画像及び左画像に垂直方向のズレが生じている場合には、映像信号保持部123に保持されている右画像及び左画像を調整値221に応じて補正し、補正した右画像及び左画像に対して視差の算出を行う。なお、右画像及び左画像の補正は、距離情報算出部124が視差を算出する際に行ってもよいし、撮像領域110から出力される右画像及び左画像を補正し映像信号保持部123に保持してもよし、映像信号保持部123に保持されている右画像及び左画像に補正を行い映像信号保持部123が保持しているデータを更新してもよい。
【0136】
また、上記説明において、調整値算出部210が、調整値221を算出するとしたが、調整値221は、外部から入力されてもよい。例えば、出荷時等に、外部の装置が、固体撮像装置200から出力された映像信号から調整値221を算出し、算出した調整値221を固体撮像装置200に入力し、調整値保持部220に保持してもよい。なお、外部から調整値221を入力する場合には、固体撮像装置200は、調整値算出部210を備えなくともよい。
【0137】
また、上記実施の形態1及び2における説明では、本発明を車両に搭載された近赤外光を用いた暗視機能を有するカメラに適用した実施例について説明したが、車両に搭載された近赤外光を用いた暗視機能を有するカメラ以外にも、撮像被写体までの距離情報を出力するカメラとして適用することができる。例えば、本発明に係る固体撮像装置は、監視装置に用いられるカメラ及びTV電話のカメラ等に適用することができる。
【0138】
また、上記実施の形態1及び2における説明では、固体撮像装置は、近赤外光を照射する光源140を備えるとしたが、光源140は、近赤外光以外の光を照射してもよい。例えば、光源140は、可視光を照射してもよい。この場合、上述した第1の周波数帯域及び第2の周波数帯域は、可視光内の、互いに重複しない異なる周波数帯域であればよい。さらに、暗視機能を必要としない場合には、固体撮像装置は、光源140を備えなくともよい。
【産業上の利用可能性】
【0139】
本発明は、固体撮像装置に適用でき、特に、車載用のカメラ、監視カメラ及びTV電話のカメラ等に適用できる。
【図面の簡単な説明】
【0140】
【図1】本発明の実施の形態1に係る固体撮像装置の構成を示す図である。
【図2】本発明の実施の形態1に係る固体撮像装置の撮像領域及び信号処理部の構成を示す図である。
【図3】本発明の実施の形態1に係る固体撮像装置の撮像領域の断面構造を模式的に示す図である。
【図4】本発明の実施の形態1に係る固体撮像装置のフィルタ157を上面から見た構成を模式的に示す図である。
【図5】本発明の実施の形態1に係る固体撮像装置のフィルタの断面構造を模して気的に示す図である。
【図6】本発明の実施の形態1に係る固体撮像装置のフィルタの光の波長に対する光の透過率を示す図である。
【図7】本発明の実施の形態1に係る固体撮像装置のフィルタの光の波長に対する光の透過率を示す図である。
【図8】本発明の実施の形態1に係る固体撮像装置の撮像領域が出力する映像信号の一例を示す図である。
【図9】本発明の実施の形態1に係る固体撮像装置の信号処理部の処理を説明するための図である。
【図10】本発明の実施の形態1に係る固体撮像装置の左画像及び右画像の光電変換に用いられる光電変換素子の配置の一例を示す図である。
【図11】本発明の実施の形態1に係る固体撮像装置の信号処理部による距離情報の算出の処理の流れを示すフローチャートである。
【図12】本発明の実施の形態1に係る固体撮像装置の距離情報算出部による距離情報の算出処理を説明するための図である。
【図13】本発明の実施の形態1に係る固体撮像装置の距離情報算出部による距離情報の算出処理を説明するための図である。
【図14】本発明の実施の形態1に係る固体撮像装置の距離情報算出部の距離情報の算出処理において距離情報保持部に保持されるデータの一例を示す図である。
【図15】本発明の実施の形態1に係る固体撮像装置の撮像領域及び信号処理部の変形例の構成を示す図である。
【図16】本発明の実施の形態2に係る固体撮像装置の構成を示す図である。
【図17】本発明の実施の形態2に係る固体撮像装置の撮像領域及び信号処理部の構成を示す図である。
【図18】従来の固体撮像装置の構成を示す図である。
【符号の説明】
【0141】
100、200、1000 固体撮像装置
110、201 撮像領域
111 光電変換素子
112 垂直走査部
113 水平走査部
114、117 A/D変換部
115 第1撮像領域
116 第2撮像領域
120 信号処理部
121 映像信号
122 距離情報
123 映像信号保持部
124 距離情報算出部
125 距離情報保持部
130、230 制御部
140 光源
150、151 レンズ
152、153、157 フィルタ
154、155 ミラー
156 ダイクロックミラー
158 第1のフィルタ
159 第2のフィルタ
160 被写体
161、166 上部反射層
162、167 スペーサ層
163、168 下部反射層
164 TiO2層
165 SiO2層
171a、171b 左画像
172a、172b 右画像
210 調整値算出部
211 第1垂直走査部
212 第2垂直走査部
220 調整値保持部
221 調整値
1001、1002 カメラ
【特許請求の範囲】
【請求項1】
行列状に配置された複数の光電変換素子を備える撮像部と、
第1の周波数帯域の光を集光する第1集光部と、
前記第1集光部と離間して設けられ、前記第1の周波数帯域と異なる第2の周波数帯域の光を集光する第2集光部と、
前記第1集光部が集光した光及び前記第2集光部が集光した光を前記撮像部に入射する光入射部と、
前記複数の光電変換素子に含まれる複数の第1光電変換素子上に形成され、前記第1の周波数帯域に含まれる第3の周波数帯域の光を透過する第1のフィルタと、
前記複数の光電変換素子に含まれる複数の第2光電変換素子上に形成され、前記第2の周波数帯域に含まれる第4の周波数帯域の光を透過する第2のフィルタとを備える
ことを特徴とする固体撮像装置。
【請求項2】
前記固体撮像装置は、さらに、
前記複数の第1光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を第1映像信号として出力し、前記複数の第2光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を第2映像信号として出力する出力手段と、
前記出力手段が出力する前記第1映像信号及び前記第2映像信号から、被写体までの距離に関する情報を算出する算出手段を備える
ことを特徴とする請求項1記載の固体撮像装置。
【請求項3】
前記算出手段は、
前記出力手段が出力する前記第1映像信号及び前記第2映像信号を保持する第1保持手段と、
前記第1保持手段が保持する前記第1映像信号及び前記第2映像信号から、前記被写体に対する視差を算出する視差算出手段と、
前記視差算出手段が算出した前記視差を保持する第2保持手段とを備える
ことを特徴とする請求項2記載の固体撮像装置。
【請求項4】
前記視差算出手段は、
前記第1保持手段が保持する前記第1映像信号のm(1以上の整数)行の画素を行方向に所定の画素分ずらす処理を所定の回数繰り返すずらし手段と、
前記ずらし手段による所定の回数の前記処理毎に、前記づらし手段がずらしたm行の映像信号と、前記第1保持手段が保持する前記第2映像信号のm行とに含まれる各画素の信号レベルの差分の絶対値を算出する差分算出手段と、
前記ずらし手段による所定の回数の前記処理毎に、前記差分算出手段が算出した差分の絶対値の、n(1以上の整数)列毎の和を算出する加算手段と、
前記ずらし手段による所定の回数の前記処理毎に、前記加算手段が算出した和が、前記第2保持手段が保持している和より小さい場合に、前記加算手段が算出した和と、前記ずらし手段による前記処理が実行された回数とを前記第2保持手段に保持する制御手段とを備え、
前記第2保持手段は、前記ずらし手段による所定の回数の前記処理が終了した後に、保持する前記処理が実行された回数を、前記視差として出力する
ことを特徴とする請求項3記載の固体撮像装置。
【請求項5】
前記視差算出手段は、外部から入力されたm1(1以上の整数)行×n1(1以上の整数)列毎に、前記視差を算出し、
前記ずらし手段は、前記第1保持手段が保持する前記第1映像信号のm1行の画素を行方向に所定の画素分ずらす処理を所定の回数繰り返し、
前記差分算出手段は、前記ずらし手段による所定の回数の前記処理毎に、前記づらし手段がずらしたm1行の映像信号と、前記第1保持手段が保持する前記第2映像信号のm1行とに含まれる各画素の信号レベルの差分の絶対値を算出し、
前記加算手段は、前記ずらし手段による所定の回数の前記処理毎に、前記差分算出手段が算出した差分絶対値の、n1列毎の和を算出する
ことを特徴とする請求項4記載の固体撮像装置。
【請求項6】
前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、
前記行列状に配置された複数の光電変換素子の各行には、前記第1光電変換素子と前記第2光電変換素子とのいずれか一方のみが配置される
ことを特徴とする請求項1〜5のいずれか1項に記載の固体撮像装置。
【請求項7】
前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、
前記第1光電変換素子と前記第2光電変換素子とは、1以上の行毎に交互に配置される
ことを特徴とする請求項6記載の固体撮像装置。
【請求項8】
前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、
前記行列状に配置された複数の光電変換素子の各行には、前記第1光電変換素子と前記第2光電変換素子とのいずれか一方のみが配置され、
前記第1光電変換素子と前記第2光電変換素子とは、m行毎に交互に配置される
ことを特徴とする請求項4記載の固体撮像装置。
【請求項9】
前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、
前記固体撮像装置は、さらに、
前記第1映像信号の画像と、前記第2映像信号の画像との列方向の画素のズレを示す値であるズレ値を保持するズレ値保持手段を備え、
前記視差算出手段は、前記第1保持手段が保持する前記第1映像信号及び前記第2映像信号のうち一方の前記ズレ値に応じた行と、前記第1保持手段が保持する前記第1映像信号及び前記第2映像信号のうち他方とから視差を算出する
ことを特徴とする請求項3記載の固体撮像装置。
【請求項10】
前記撮像部は、
前記第1光電変換素子の行を選択する第1行選択手段と、
前記第2光電変換素子の行を選択する第2行選択手段とを備え、
前記出力手段は、前記第1行選択手段により行選択された前記第1光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を前記第1映像信号として出力し、前記第2行選択手段により選択された前記第2光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を前記第2映像信号として出力し、
前記固体撮像装置は、さらに、
前記ズレ値保持手段が保持する前記ズレ値に応じた行から前記第1行選択手段又は前記第2行選択手段による行の選択を開始させる行制御手段を備える
ことを特徴とする請求項1〜8のいずれか1項に記載の固体撮像装置。
【請求項11】
前記固体撮像装置は、さらに、
前記第1映像信号及び前記第2映像信号から、前記ズレ値を算出するズレ値算出手段を備え、
前記ズレ値保持手段は、前記ズレ値算出手段が算出した前記ズレ値を保持する
ことを特徴とする請求項9又は10記載の固体撮像装置。
【請求項12】
前記出力手段は、各列の前記光電変換素子が光電変換した信号電荷を、それぞれデジタル信号に変換し前記第1映像信号又は前記第2映像信号として出力する複数の変換手段を備える
ことを特徴とする請求項4記載の固体撮像装置。
【請求項13】
前記第1保持手段は、少なくともm行の前記第1映像信号及び前記第2映像信号を保持する
ことを特徴とする請求項4記載の固体撮像装置。
【請求項14】
前記第1保持手段は、少なくとも2×m行の前記第1映像信号及び前記第2映像信号を保持し、
前記第2保持手段は、m行単位の少なくとも2×m行の前記視差算出手段が算出した前記視差を保持し、
前記視差算出手段は、前記2×m行のうち一方のm行の前記第1映像信号及び前記第2映像信号と、該m行の第1映像信号及び第2映像信号に対応するm行の視差とが出力されている間に、前記2×m行のうち他方のm行の前記第1映像信号及び前記第2映像信号から、m行の視差を算出する
ことを特徴とする請求項4記載の固体撮像装置。
【請求項15】
前記算出手段は、さらに、
前記第2保持手段が保持する前記視差と、所定の範囲とを比較し、前記視差が所定の範囲に含まれない場合には、該視差に対応する前記第1映像信号及び前記第2映像信号を所定の画像に置き換えて出力する置き換え手段を備える
ことを特徴とする請求項3記載の固体撮像装置。
【請求項16】
前記第1のフィルタ及び前記第2のフィルタは、
第1誘電体層及び第2誘電体層と、
前記第1誘電体層と前記第2誘電体層との間に形成される絶縁体で構成される絶縁体層とを備え、
前記絶縁体層の光学膜厚は、前記第1誘電体層及び前記第2誘電体層の光学膜厚と異なる
ことを特徴とする請求項1〜15のいずれか1項に記載の固体撮像装置。
【請求項17】
前記固体撮像装置は、さらに、
前記第1周波数帯域及び前記第2周波数帯域を含む周波数帯域の光を被写体に照射する光源を備える
ことを特徴とする請求項1〜16のいずれか1項に記載の固体撮像装置。
【請求項18】
前記第1周波数帯域及び前記第2周波数帯域は、近赤外領域に含まれる
ことを特徴とする請求項1〜17のいずれか1項に記載の固体撮像装置。
【請求項19】
請求項1〜18のいずれか1項に記載の固体撮像装置を備える
ことを特徴とするカメラ。
【請求項20】
請求項19記載のカメラを備える
ことを特徴とする車両。
【請求項21】
請求項19記載のカメラを備える
ことを特徴とする監視装置。
【請求項1】
行列状に配置された複数の光電変換素子を備える撮像部と、
第1の周波数帯域の光を集光する第1集光部と、
前記第1集光部と離間して設けられ、前記第1の周波数帯域と異なる第2の周波数帯域の光を集光する第2集光部と、
前記第1集光部が集光した光及び前記第2集光部が集光した光を前記撮像部に入射する光入射部と、
前記複数の光電変換素子に含まれる複数の第1光電変換素子上に形成され、前記第1の周波数帯域に含まれる第3の周波数帯域の光を透過する第1のフィルタと、
前記複数の光電変換素子に含まれる複数の第2光電変換素子上に形成され、前記第2の周波数帯域に含まれる第4の周波数帯域の光を透過する第2のフィルタとを備える
ことを特徴とする固体撮像装置。
【請求項2】
前記固体撮像装置は、さらに、
前記複数の第1光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を第1映像信号として出力し、前記複数の第2光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を第2映像信号として出力する出力手段と、
前記出力手段が出力する前記第1映像信号及び前記第2映像信号から、被写体までの距離に関する情報を算出する算出手段を備える
ことを特徴とする請求項1記載の固体撮像装置。
【請求項3】
前記算出手段は、
前記出力手段が出力する前記第1映像信号及び前記第2映像信号を保持する第1保持手段と、
前記第1保持手段が保持する前記第1映像信号及び前記第2映像信号から、前記被写体に対する視差を算出する視差算出手段と、
前記視差算出手段が算出した前記視差を保持する第2保持手段とを備える
ことを特徴とする請求項2記載の固体撮像装置。
【請求項4】
前記視差算出手段は、
前記第1保持手段が保持する前記第1映像信号のm(1以上の整数)行の画素を行方向に所定の画素分ずらす処理を所定の回数繰り返すずらし手段と、
前記ずらし手段による所定の回数の前記処理毎に、前記づらし手段がずらしたm行の映像信号と、前記第1保持手段が保持する前記第2映像信号のm行とに含まれる各画素の信号レベルの差分の絶対値を算出する差分算出手段と、
前記ずらし手段による所定の回数の前記処理毎に、前記差分算出手段が算出した差分の絶対値の、n(1以上の整数)列毎の和を算出する加算手段と、
前記ずらし手段による所定の回数の前記処理毎に、前記加算手段が算出した和が、前記第2保持手段が保持している和より小さい場合に、前記加算手段が算出した和と、前記ずらし手段による前記処理が実行された回数とを前記第2保持手段に保持する制御手段とを備え、
前記第2保持手段は、前記ずらし手段による所定の回数の前記処理が終了した後に、保持する前記処理が実行された回数を、前記視差として出力する
ことを特徴とする請求項3記載の固体撮像装置。
【請求項5】
前記視差算出手段は、外部から入力されたm1(1以上の整数)行×n1(1以上の整数)列毎に、前記視差を算出し、
前記ずらし手段は、前記第1保持手段が保持する前記第1映像信号のm1行の画素を行方向に所定の画素分ずらす処理を所定の回数繰り返し、
前記差分算出手段は、前記ずらし手段による所定の回数の前記処理毎に、前記づらし手段がずらしたm1行の映像信号と、前記第1保持手段が保持する前記第2映像信号のm1行とに含まれる各画素の信号レベルの差分の絶対値を算出し、
前記加算手段は、前記ずらし手段による所定の回数の前記処理毎に、前記差分算出手段が算出した差分絶対値の、n1列毎の和を算出する
ことを特徴とする請求項4記載の固体撮像装置。
【請求項6】
前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、
前記行列状に配置された複数の光電変換素子の各行には、前記第1光電変換素子と前記第2光電変換素子とのいずれか一方のみが配置される
ことを特徴とする請求項1〜5のいずれか1項に記載の固体撮像装置。
【請求項7】
前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、
前記第1光電変換素子と前記第2光電変換素子とは、1以上の行毎に交互に配置される
ことを特徴とする請求項6記載の固体撮像装置。
【請求項8】
前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、
前記行列状に配置された複数の光電変換素子の各行には、前記第1光電変換素子と前記第2光電変換素子とのいずれか一方のみが配置され、
前記第1光電変換素子と前記第2光電変換素子とは、m行毎に交互に配置される
ことを特徴とする請求項4記載の固体撮像装置。
【請求項9】
前記第1集光部と前記第2集光部とは、前記行列状に配置された複数の光電変換素子の行方向に離間して設けられ、
前記固体撮像装置は、さらに、
前記第1映像信号の画像と、前記第2映像信号の画像との列方向の画素のズレを示す値であるズレ値を保持するズレ値保持手段を備え、
前記視差算出手段は、前記第1保持手段が保持する前記第1映像信号及び前記第2映像信号のうち一方の前記ズレ値に応じた行と、前記第1保持手段が保持する前記第1映像信号及び前記第2映像信号のうち他方とから視差を算出する
ことを特徴とする請求項3記載の固体撮像装置。
【請求項10】
前記撮像部は、
前記第1光電変換素子の行を選択する第1行選択手段と、
前記第2光電変換素子の行を選択する第2行選択手段とを備え、
前記出力手段は、前記第1行選択手段により行選択された前記第1光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を前記第1映像信号として出力し、前記第2行選択手段により選択された前記第2光電変換素子が光電変換した信号電荷を電圧又は電流に変換し、変換した電圧又は電流を前記第2映像信号として出力し、
前記固体撮像装置は、さらに、
前記ズレ値保持手段が保持する前記ズレ値に応じた行から前記第1行選択手段又は前記第2行選択手段による行の選択を開始させる行制御手段を備える
ことを特徴とする請求項1〜8のいずれか1項に記載の固体撮像装置。
【請求項11】
前記固体撮像装置は、さらに、
前記第1映像信号及び前記第2映像信号から、前記ズレ値を算出するズレ値算出手段を備え、
前記ズレ値保持手段は、前記ズレ値算出手段が算出した前記ズレ値を保持する
ことを特徴とする請求項9又は10記載の固体撮像装置。
【請求項12】
前記出力手段は、各列の前記光電変換素子が光電変換した信号電荷を、それぞれデジタル信号に変換し前記第1映像信号又は前記第2映像信号として出力する複数の変換手段を備える
ことを特徴とする請求項4記載の固体撮像装置。
【請求項13】
前記第1保持手段は、少なくともm行の前記第1映像信号及び前記第2映像信号を保持する
ことを特徴とする請求項4記載の固体撮像装置。
【請求項14】
前記第1保持手段は、少なくとも2×m行の前記第1映像信号及び前記第2映像信号を保持し、
前記第2保持手段は、m行単位の少なくとも2×m行の前記視差算出手段が算出した前記視差を保持し、
前記視差算出手段は、前記2×m行のうち一方のm行の前記第1映像信号及び前記第2映像信号と、該m行の第1映像信号及び第2映像信号に対応するm行の視差とが出力されている間に、前記2×m行のうち他方のm行の前記第1映像信号及び前記第2映像信号から、m行の視差を算出する
ことを特徴とする請求項4記載の固体撮像装置。
【請求項15】
前記算出手段は、さらに、
前記第2保持手段が保持する前記視差と、所定の範囲とを比較し、前記視差が所定の範囲に含まれない場合には、該視差に対応する前記第1映像信号及び前記第2映像信号を所定の画像に置き換えて出力する置き換え手段を備える
ことを特徴とする請求項3記載の固体撮像装置。
【請求項16】
前記第1のフィルタ及び前記第2のフィルタは、
第1誘電体層及び第2誘電体層と、
前記第1誘電体層と前記第2誘電体層との間に形成される絶縁体で構成される絶縁体層とを備え、
前記絶縁体層の光学膜厚は、前記第1誘電体層及び前記第2誘電体層の光学膜厚と異なる
ことを特徴とする請求項1〜15のいずれか1項に記載の固体撮像装置。
【請求項17】
前記固体撮像装置は、さらに、
前記第1周波数帯域及び前記第2周波数帯域を含む周波数帯域の光を被写体に照射する光源を備える
ことを特徴とする請求項1〜16のいずれか1項に記載の固体撮像装置。
【請求項18】
前記第1周波数帯域及び前記第2周波数帯域は、近赤外領域に含まれる
ことを特徴とする請求項1〜17のいずれか1項に記載の固体撮像装置。
【請求項19】
請求項1〜18のいずれか1項に記載の固体撮像装置を備える
ことを特徴とするカメラ。
【請求項20】
請求項19記載のカメラを備える
ことを特徴とする車両。
【請求項21】
請求項19記載のカメラを備える
ことを特徴とする監視装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2008−153931(P2008−153931A)
【公開日】平成20年7月3日(2008.7.3)
【国際特許分類】
【出願番号】特願2006−339762(P2006−339762)
【出願日】平成18年12月18日(2006.12.18)
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
【公開日】平成20年7月3日(2008.7.3)
【国際特許分類】
【出願日】平成18年12月18日(2006.12.18)
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]