
固定式ケーブルクレーンの運転方法
【課題】2基のケーブルクレーンでの合吊り運転を確実に行うことができ、広い範囲での吊荷の荷降ろしが可能となる固定式ケーブルクレーンの運転方法を提供すること。
【解決手段】1号固定式ケーブルクレーン1および2号固定式ケーブルクレーン3を並列に設置する。そして、ウェブ59に吊り穴61を有するI型鋼57を、1号固定式ケーブルクレーン1の1号吊具17と2号固定式ケーブルクレーン3の2号吊具19とに架け渡して吊り下げ、任意の吊り穴61に第3の吊具65を設置して吊荷67を吊る。さらに、1号位置検出器35および2号位置検出器41により、1号吊具17および2号吊具19の位置信号を検出し、これらの位置信号と1号固定式ケーブルクレーン1の動作信号とに基づいて、1号吊具17と2号吊具19とが同期して移動するように2号固定式ケーブルクレーン3に動作信号を出力する。
【解決手段】1号固定式ケーブルクレーン1および2号固定式ケーブルクレーン3を並列に設置する。そして、ウェブ59に吊り穴61を有するI型鋼57を、1号固定式ケーブルクレーン1の1号吊具17と2号固定式ケーブルクレーン3の2号吊具19とに架け渡して吊り下げ、任意の吊り穴61に第3の吊具65を設置して吊荷67を吊る。さらに、1号位置検出器35および2号位置検出器41により、1号吊具17および2号吊具19の位置信号を検出し、これらの位置信号と1号固定式ケーブルクレーン1の動作信号とに基づいて、1号吊具17と2号吊具19とが同期して移動するように2号固定式ケーブルクレーン3に動作信号を出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、固定式ケーブルクレーンの運転方法に関するものである。
【背景技術】
【0002】
従来、ダム工事等の土木工事において、各種のケーブルクレーンが用いられている。ケーブルクレーンは、ニ点間に張り渡した主索上をトロリが横行する形式のクレーンであり、主索の両端の位置が固定されている固定式ケーブルクレーン(例えば、特許文献1の従来技術参照)、主索の片端または両端の位置が移動する走行式及び軌索式ケーブルクレーンなどがある。固定式ケーブルクレーンは、主索の両端の位置が固定されているため、吊荷は、主索の直下に荷降ろしされる。
【0003】
工事において使用するクレーンの種類や数は、工事内容や現場の条件に応じて決定される。2基の固定式ケーブルクレーンを併設して使用する際、クレーンの定格荷重以上の吊荷を運搬する場合には、2基での合吊りが行われている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許4131092号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、2基の固定式ケーブルクレーンを用いて合吊りを行う場合、クレーンのオペレータ及び信号員の技量や、クレーンの仕様の違い、無線の途切れ等によって、2基のクレーンの吊具の位置に誤差が生じる場合がある。2基の吊具の位置に誤差が生じると、玉掛けが外れ、吊荷が落下する危険性がある。特に、2基のクレーンが離れて設置されている場合には、オペレータの目視のみによる合吊り運転は困難である。
【0006】
また、固定式ケーブルクレーンを用いた場合、主索の直下以外の場所に吊荷を降ろすためには、主索の直下に仮置きした後、ラフタークレーン等で吊りなおし、目的の場所へ移動する必要がある。ラフタークレーン等の走行・据付場所を確保できない場合には、吊荷の運搬が困難となる。
【0007】
さらに、ケーブルクレーンは、主索のたわみによるバウンド等の影響があるため、精密な作業にはあまり適していない。
【課題を解決するための手段】
【0008】
本発明は、前述した問題点に鑑みてなされたもので、その目的とすることは、2基のケーブルクレーンでの合吊り運転を確実に行うことができ、広い範囲での吊荷の荷降ろしが可能となる固定式ケーブルクレーンの運転方法を提供することである。
【0009】
前述した目的を達成するために、本発明は、並列に配置された第1の固定式ケーブルクレーンおよび第2の固定式ケーブルクレーンの運転方法であって、前記第1の固定式ケーブルクレーンの吊具および前記第2の固定式ケーブルクレーンの吊具の位置信号を検出し、前記位置信号と前記第1の固定式ケーブルクレーンの動作信号とに基づいて、前記第1の固定式ケーブルクレーンの吊具と前記第2の固定式ケーブルクレーンの吊具とが同期して移動するように前記第2の固定式ケーブルクレーンに動作信号を出力することを特徴とする固定式ケーブルクレーンの運転方法である。
【0010】
位置信号とは、横行位置および巻き位置に関する信号であり、動作信号とは、横行速度および巻き速度に関する信号である。
【0011】
本発明では、例えば、ウェブに吊り穴を有する第1のI型鋼を、第1の固定式ケーブルクレーンの吊具と第2の固定式ケーブルクレーンの吊具とに架け渡して吊り下げ、吊り穴に第3の吊具を設置して吊荷を吊る。また、必要に応じて、第1のI型鋼を、第1の固定式ケーブルクレーンの吊具の側に張り出すように架け渡して吊り下げ、第1のI型鋼の張り出し部分に吊荷を吊る際には、第1のI型鋼が水平に保持されるように第1のI型鋼にカウンターウェイトを吊る。
【0012】
本発明では、第1のI型鋼に代えて、電動ホイストおよび角度検出器を設置した第2のI型鋼を第1の固定式ケーブルクレーンの吊具と第2の固定式ケーブルクレーンの吊具とに架け渡して吊り下げてもよい。この場合、電動ホイストに第4の吊具を設置して吊荷を吊る。そして、電動ホイストが第2のI型鋼に沿って横行することによって生じる第1の固定式ケーブルクレーンの吊具と第2の固定式ケーブルクレーンの吊具との高低差を角度検出器を用いて検出し、第2のI型鋼が水平に保持されるように第2の固定式ケーブルクレーンの吊具の位置を微調整する。
【0013】
本発明では、第1の固定式ケーブルクレーンの吊具および第2の固定式ケーブルクレーンの吊具の位置信号と第1の固定式ケーブルクレーンの動作信号とに基づいて、第1の固定式ケーブルクレーンの吊具と第2の固定式ケーブルクレーンの吊具とが同期して移動するように第2の固定式ケーブルクレーンに動作信号を出力する。よって、第1の固定式ケーブルクレーンに対する操作により、第1の固定式ケーブルクレーンの吊具および第2の固定式ケーブルクレーンの吊具が同時に動作し、2基のケーブルクレーンでの合吊り運転を確実に行うことができる。
【0014】
また、I型鋼を、第1の固定式ケーブルクレーンの吊具と第2の固定式ケーブルクレーンの吊具とに架け渡して吊り下げ、I型鋼に第3の吊具や電動ホイストを取り付けることにより、広い範囲での吊荷の荷降ろしが可能となる。
【発明の効果】
【0015】
本発明によれば、2基のケーブルクレーンでの合吊り運転を確実に行うことができ、広い範囲での吊荷の荷降ろしが可能となる固定式ケーブルクレーンの運転方法を提供できる。
【図面の簡単な説明】
【0016】
【図1】2基の固定式ケーブルクレーンの概要を示す図
【図2】2基の固定式ケーブルクレーンの入出力概略図
【図3】ノッチとバイナリ信号の対応関係を示す図
【図4】ダム12の垂直断面図
【図5】1号吊具17よび2号吊具19に吊り穴61を有するI型鋼57を吊り下げた状態を示す図
【図6】I型鋼57の張り出し部分87に吊荷67を吊った状態を示す図
【図7】1号吊具17よび2号吊具19に電動ホイスト71を有するI型鋼83を吊り下げた状態を示す図
【発明を実施するための形態】
【0017】
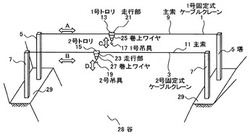
以下、図面に基づいて、本発明の第1の実施の形態について詳細に説明する。図1は、2基の固定式ケーブルクレーンの概要を示す図である。第1の実施の形態では、図1に示すように、第1の固定式ケーブルクレーンである1号固定式ケーブルクレーン1、第2の固定式ケーブルクレーンである2号固定式ケーブルクレーン3が、ダムの建設予定地である谷28の上方に並列に設置される。1号固定式ケーブルクレーン1は、建設予定のダム12(図4)の軸より下流に、2号固定式ケーブルクレーン3は、さらに下流に設置される。
【0018】
1号固定式ケーブルクレーン1は、一対の塔5、主索9、1号トロリ13等からなる。塔5は、谷28の左岸および右岸に設けられた基礎29上に固定される。主索9は、対向する塔5の間に懸架される。1号トロリ13は、走行部21、巻上ワイヤ25、第1の固定式ケーブルクレーンの吊具である1号吊具17、図示しない複数のワイヤやウインチ等からなる。走行部21は、図示しないワイヤやウインチにより、矢印Aに示すように主索9に沿って横行する。1号吊具17は、巻上ワイヤ25により、走行部21に吊り下げられる。1号吊具17は、巻上ワイヤ25や図示しないウインチにより、矢印Cに示すように上下方向に移動する。
【0019】
2号固定式ケーブルクレーン3は、一対の塔7、主索11、2号トロリ15等からなる。塔7は、谷28の左岸および右岸に設けられた基礎29上に固定される。主索11は、対向する塔7の間に懸架される。2号トロリ15は、走行部23、巻上ワイヤ27、第2の固定式ケーブルクレーンの吊具である2号吊具19、図示しない複数のワイヤやウインチ等からなる。走行部23は、図示しないワイヤやウインチにより、矢印Bに示すように主索11に沿って横行する。2号吊具19は、巻上ワイヤ27により、走行部23に吊り下げられる。2号吊具19は、巻上ワイヤ27や図示しないウインチにより、矢印Dに示すように上下方向に移動する。
【0020】
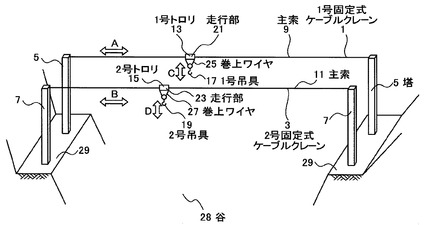
図2は、2基の固定式ケーブルクレーンの入出力概略図を示す。図3は、ノッチとバイナリ信号の対応関係を示す図である。1号固定式ケーブルクレーン1、2号固定式ケーブルクレーン3は、通常は手動により独立して制御される。通常の手動運転の場合は、図2に示すように、1号操作部31(操作レバー)からノッチ信号を出力し、矢印45に示すように1号制御盤33に動作信号を入力する。この動作信号は、1号トロリ13の横行速度および巻き速度に関する信号である。動作信号は、矢印47に示すように1号制御盤33から1号トロリ13に動作として出力される。
【0021】
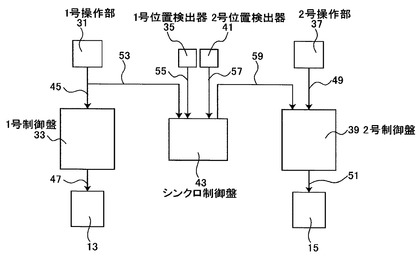
2号操作部37(操作レバー)はアブソリュートエンコーダであり、10ビットのバイナリ信号を出力し、矢印49に示すように2号制御盤39に動作信号を入力する。この動作信号は、2号トロリ15の横行速度および巻き速度に関する信号である。動作信号は、矢印51に示すように2号制御盤39から2号トロリ15に動作として出力される。2号操作部37(操作レバー)のバイナリ信号は、1号操作部31(操作レバー)のノッチに対して、図3に示す数字を出力する。
【0022】
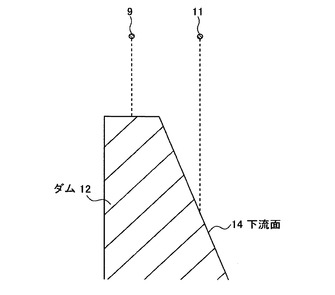
図4は、ダム12の垂直断面図である。ダム12を構築する際には、1号固定式ケーブルクレーン1と2号固定式ケーブルクレーン3とを用いてコンクリート等を運搬する。図4に示すように、1号固定式ケーブルクレーン1、2号固定式ケーブルクレーン3の荷降ろし位置は、それぞれ主索9、主索11の直下である。そのため、2号固定式ケーブルクレーン3は、ダム12の下流面14が主索11の直下まで構築された後は、荷降ろしができず、単独での使用が不可能となる。
【0023】
2号固定式ケーブルクレーン3を単独で使用しない場合、1号固定式ケーブルクレーン1と2号固定式ケーブルクレーン3とは、必要に応じて、合吊り運転を行うために同時に制御して運転される。同時に制御して運転する場合は、図2に示す矢印49の指令系統を切断し、2号固定式ケーブルクレーン3の独立運転を終了する。そして、図2に示すように、1号操作部31(操作レバー)から出力した動作信号を、矢印45、矢印53に示すように1号制御盤33、シンクロ制御盤43に入力する。この動作信号は、1号トロリ13の横行速度および巻き速度に関する信号である。1号制御盤33に入力された動作信号は、矢印47に示すように1号トロリ13に出力される。
【0024】
また、1号位置検出器35により1号吊具17の位置・高さを検出し、矢印55に示すようにシンクロ制御盤43に位置信号を入力する。この位置信号は、1号吊具17の横行位置および巻き位置に関する信号である。同時に、2号位置検出器41により2号吊具19の位置・高さを検出し、矢印57に示すようにシンクロ制御盤43に位置信号を入力する。この位置信号は、2号吊具19の横行位置および巻き位置に関する信号である。
【0025】
シンクロ制御盤43は、1号操作部31(操作レバー)から受け取った動作信号と、1号位置検出器35から受け取った位置信号と、2号位置検出器41から受け取った位置信号とに基づき、PID制御をして、1号吊具17と2号吊具19とが同期して移動するように最適な動作信号を出力する。動作信号は、矢印59に示すように2号制御盤39に入力される。2号制御盤39に入力された動作信号は、矢印51に示すように2号トロリ15に出力される。
【0026】
1号固定式ケーブルクレーン1と2号固定式ケーブルクレーン3とを同時に制御して運転する際には、2号固定式ケーブルクレーン3に対する速度指令の急激な変動を防止するため、ノッチ信号に対するバイナリ信号の変動範囲を前後20に限定する。例えば、1号操作部31で1ノッチの指令を出した場合、図3に示すように1ノッチに対応するバイナリ信号は34であるので、2号制御盤39から出力するバイナリ信号は、14〜54の間とする。
【0027】
なお、通常の手動運転とシンクロ制御盤43を用いた同時運転との切り替えや、1号吊具17と2号吊具19との誤差の表示等は、タッチパネル等の表示画面を用いて行われる。
【0028】
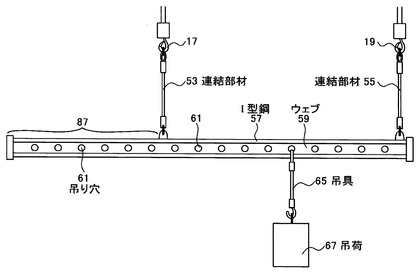
図5は、1号吊具17よび2号吊具19に吊り穴61を有するI型鋼57を吊り下げた状態を示す図である。1号固定式ケーブルクレーン1と2号固定式ケーブルクレーン3とを同時に制御して合吊り運転する場合、必要に応じて、図5に示すように、1号固定式ケーブルクレーン1の1号吊具17、2号固定式ケーブルクレーン3の2号吊具19に、第1のI型鋼であるI型鋼57を架け渡して吊り下げる。1号吊具17、2号吊具19は、それぞれ、I型鋼57に取り付けられた連結部材53、連結部材55に連結される。I型鋼57は、1号吊具17の側に張り出すように架け渡して吊り下げられる。
【0029】
I型鋼57は、ウェブ59に吊り穴61を有する。I型鋼57は、任意の吊り穴61に第3の吊具である吊具65が設置される。吊具65は、例えば、ワイヤとシャックルからなる。吊具65を設置する吊り穴61を自由に選択することにより、吊具65に吊り下げた吊荷67を、主索9や主索11の直下以外の場所に降ろすことが可能となる。なお、図5に示すように、1号吊具17と2号吊具19との間の位置の吊り穴61に吊具65を設置して吊荷67を吊る場合、図6に示すようなカウンターウェイト69は不要である。
【0030】
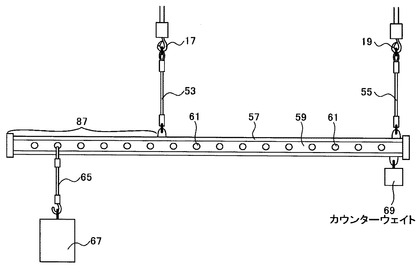
図6は、I型鋼57の張り出し部分87に吊荷67を吊った状態を示す図である。図6では、I型鋼57の張り出し部分87、すなわち、1号吊具17と2号吊具19との間から外れた位置の吊り穴61に吊具65が設置される。図6に示すように、I型鋼57の張り出し部分87に設置された吊具65に吊荷67を吊り下げる場合、I型鋼57を水平に保持するために、他方にカウンターウェイト69を吊る。
【0031】
このように、第1の実施の形態によれば、1号固定式ケーブルクレーン1の操作によって2号固定式ケーブルクレーン3が同時に動作するように制御して運転することにより、2基のケーブルクレーンによる合吊り運転を確実に行うことができる。また、I型鋼57の任意の吊り穴61に吊具65を設置することにより、吊荷67の荷降ろし範囲を拡大することができる。
【0032】
次に、第2の実施の形態について説明する。第2の実施の形態で使用する1号固定式ケーブルクレーン1、2号固定式ケーブルクレーン3は、第1の実施の形態と同一のものである。
【0033】
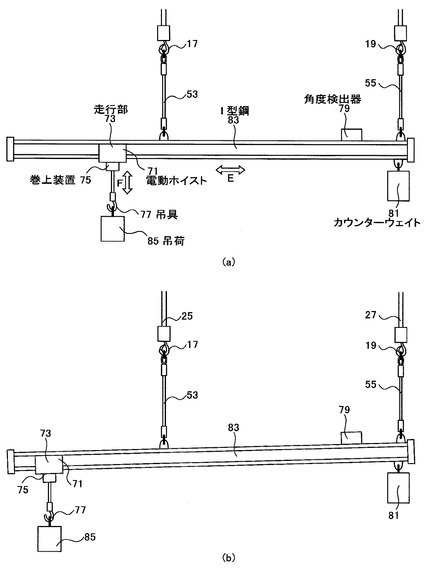
図7は、1号吊具17よび2号吊具19に電動ホイスト71を有するI型鋼83を吊り下げた状態を示す図である。図7の(a)図は、I型鋼83が水平に保たれた状態を示す。
【0034】
第2の実施の形態では、1号固定式ケーブルクレーン1と2号固定式ケーブルクレーン3とを同時に制御して運転する場合に、図5および図6に示すI型鋼57のかわりに、図7の(a)図に示すように、1号固定式ケーブルクレーン1の1号吊具17、2号固定式ケーブルクレーン3の2号吊具19に、第2のI型鋼であるI型鋼83を架け渡して吊り下げる。1号吊具17、2号吊具19は、それぞれ、I型鋼83に取り付けられた連結部材53、連結部材55に連結される。I型鋼83は、1号吊具17の側に張り出すように架け渡して吊り下げられる。
【0035】
I型鋼83は、2号吊具19側の端部付近に、角度検出器79が取り付けられる。また、I型鋼83は、電動ホイスト71が取り付けられる。電動ホイスト71は、走行部73、巻上装置75、第4の吊具である吊具77等からなる。走行部73は、矢印Eに示すようにI型鋼83に沿って横行する。巻上装置75は、吊具77を、矢印Fに示すように上下方向に移動させる。さらに、I型鋼83は、2号吊具19側の端部付近に、カウンターウェイト81が取り付けられる。
【0036】
第2の実施の形態では、I型鋼83に電動ホイスト71、角度検出器79、カウンターウェイト81を取り付けることにより、テルハとする。電動ホイスト71をI型鋼83に沿って移動させることにより、吊具77に吊り下げた吊荷85を、主索9や主索11の直下以外の場所に降ろすことが可能となる。テルハの操作は、吊荷85の荷降ろし場所にいる信号員が無線により目視で行うため、スライド型枠や内部構造物を移動させるような微調整を要する作業が可能となる。
【0037】
図7の(b)図は、1号吊具17と2号吊具19とに高低差が生じた状態を示す。電動ホイスト71がI型鋼83に沿って移動すると、1号吊具17と2号吊具19とにかかる荷重の変動により、ワイヤのたわみ具合が変化するため、巻上ワイヤ25と巻上ワイヤ27の長さが同じでも、1号吊具17と2号吊具19との位置が変動し、I型鋼83が水平でなくなる。
【0038】
角度検出器79は、I型鋼83の角度を検出し、図2に示すシンクロ制御盤43に無線により入力する。シンクロ制御盤43は、1号吊具17と2号吊具19とに高低差が生じた場合、角度検出器79の信号を加味して、2号吊具19の位置すなわち巻上ワイヤ27の巻具合を微調整することで、I型鋼83を水平に保つ。
【0039】
第2の実施の形態によれば、第1の実施の形態と同様に、1号固定式ケーブルクレーン1の操作によって2号固定式ケーブルクレーン3が同時に動作するように制御して運転することにより、2基のケーブルクレーンによる合吊り運転を確実に行うことができる。また、I型鋼83に電動ホイスト71を取り付けることにより、吊荷85の荷降ろし範囲を拡大することができるうえ、微調整が必要な精密作業にも対応可能となる。
【0040】
なお、第1および第2の実施の形態では、ダム12の建設現場を例として説明したが、本発明は、ダム以外の建造物の建設現場でも適用できる。また、1号固定式ケーブルクレーン1の操作レバーはノッチによる出力方式とし、2号固定式ケーブルクレーン3の操作レバーはアブソリュートエンコーダとしたが、2基の操作レバーの仕様はこの限りではない。
【0041】
第1の実施の形態のI型鋼57、第2の実施の形態のI型鋼83の吊下げ方法は、図5から図7に示す方法に限らず、I型鋼57、I型鋼83を1号吊具17および2号吊具19に確実に吊り下げられる方法であればよい。また、第1の実施の形態、第2の実施の形態では、I型鋼57、I型鋼83を吊具17の側に張り出すように架け渡して吊り下げたが、I型鋼の吊り下げ位置はこれに限らない。I型鋼は、吊具の位置から張り出さないように架け渡してもよい。
【0042】
以上、添付図を参照しながら、本発明の実施の形態を説明したが、本発明の技術的範囲は、前述した実施の形態に左右されない。当業者であれば、特許請求の範囲に記載された技術的思想の範疇内において各種の変更例または修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【符号の説明】
【0043】
1………1号固定式ケーブルクレーン
3………12号固定式ケーブルクレーン
9、11………主索
13………1号トロリ
15………2号トロリ
17………1号吊具
19………2号吊具
57、83………I型鋼
59………ウェブ
61………吊り穴
65、77………吊具
69、81………カウンターウェイト
71………電動ホイスト
79………角度検出器
87………張り出し部
【技術分野】
【0001】
本発明は、固定式ケーブルクレーンの運転方法に関するものである。
【背景技術】
【0002】
従来、ダム工事等の土木工事において、各種のケーブルクレーンが用いられている。ケーブルクレーンは、ニ点間に張り渡した主索上をトロリが横行する形式のクレーンであり、主索の両端の位置が固定されている固定式ケーブルクレーン(例えば、特許文献1の従来技術参照)、主索の片端または両端の位置が移動する走行式及び軌索式ケーブルクレーンなどがある。固定式ケーブルクレーンは、主索の両端の位置が固定されているため、吊荷は、主索の直下に荷降ろしされる。
【0003】
工事において使用するクレーンの種類や数は、工事内容や現場の条件に応じて決定される。2基の固定式ケーブルクレーンを併設して使用する際、クレーンの定格荷重以上の吊荷を運搬する場合には、2基での合吊りが行われている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許4131092号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、2基の固定式ケーブルクレーンを用いて合吊りを行う場合、クレーンのオペレータ及び信号員の技量や、クレーンの仕様の違い、無線の途切れ等によって、2基のクレーンの吊具の位置に誤差が生じる場合がある。2基の吊具の位置に誤差が生じると、玉掛けが外れ、吊荷が落下する危険性がある。特に、2基のクレーンが離れて設置されている場合には、オペレータの目視のみによる合吊り運転は困難である。
【0006】
また、固定式ケーブルクレーンを用いた場合、主索の直下以外の場所に吊荷を降ろすためには、主索の直下に仮置きした後、ラフタークレーン等で吊りなおし、目的の場所へ移動する必要がある。ラフタークレーン等の走行・据付場所を確保できない場合には、吊荷の運搬が困難となる。
【0007】
さらに、ケーブルクレーンは、主索のたわみによるバウンド等の影響があるため、精密な作業にはあまり適していない。
【課題を解決するための手段】
【0008】
本発明は、前述した問題点に鑑みてなされたもので、その目的とすることは、2基のケーブルクレーンでの合吊り運転を確実に行うことができ、広い範囲での吊荷の荷降ろしが可能となる固定式ケーブルクレーンの運転方法を提供することである。
【0009】
前述した目的を達成するために、本発明は、並列に配置された第1の固定式ケーブルクレーンおよび第2の固定式ケーブルクレーンの運転方法であって、前記第1の固定式ケーブルクレーンの吊具および前記第2の固定式ケーブルクレーンの吊具の位置信号を検出し、前記位置信号と前記第1の固定式ケーブルクレーンの動作信号とに基づいて、前記第1の固定式ケーブルクレーンの吊具と前記第2の固定式ケーブルクレーンの吊具とが同期して移動するように前記第2の固定式ケーブルクレーンに動作信号を出力することを特徴とする固定式ケーブルクレーンの運転方法である。
【0010】
位置信号とは、横行位置および巻き位置に関する信号であり、動作信号とは、横行速度および巻き速度に関する信号である。
【0011】
本発明では、例えば、ウェブに吊り穴を有する第1のI型鋼を、第1の固定式ケーブルクレーンの吊具と第2の固定式ケーブルクレーンの吊具とに架け渡して吊り下げ、吊り穴に第3の吊具を設置して吊荷を吊る。また、必要に応じて、第1のI型鋼を、第1の固定式ケーブルクレーンの吊具の側に張り出すように架け渡して吊り下げ、第1のI型鋼の張り出し部分に吊荷を吊る際には、第1のI型鋼が水平に保持されるように第1のI型鋼にカウンターウェイトを吊る。
【0012】
本発明では、第1のI型鋼に代えて、電動ホイストおよび角度検出器を設置した第2のI型鋼を第1の固定式ケーブルクレーンの吊具と第2の固定式ケーブルクレーンの吊具とに架け渡して吊り下げてもよい。この場合、電動ホイストに第4の吊具を設置して吊荷を吊る。そして、電動ホイストが第2のI型鋼に沿って横行することによって生じる第1の固定式ケーブルクレーンの吊具と第2の固定式ケーブルクレーンの吊具との高低差を角度検出器を用いて検出し、第2のI型鋼が水平に保持されるように第2の固定式ケーブルクレーンの吊具の位置を微調整する。
【0013】
本発明では、第1の固定式ケーブルクレーンの吊具および第2の固定式ケーブルクレーンの吊具の位置信号と第1の固定式ケーブルクレーンの動作信号とに基づいて、第1の固定式ケーブルクレーンの吊具と第2の固定式ケーブルクレーンの吊具とが同期して移動するように第2の固定式ケーブルクレーンに動作信号を出力する。よって、第1の固定式ケーブルクレーンに対する操作により、第1の固定式ケーブルクレーンの吊具および第2の固定式ケーブルクレーンの吊具が同時に動作し、2基のケーブルクレーンでの合吊り運転を確実に行うことができる。
【0014】
また、I型鋼を、第1の固定式ケーブルクレーンの吊具と第2の固定式ケーブルクレーンの吊具とに架け渡して吊り下げ、I型鋼に第3の吊具や電動ホイストを取り付けることにより、広い範囲での吊荷の荷降ろしが可能となる。
【発明の効果】
【0015】
本発明によれば、2基のケーブルクレーンでの合吊り運転を確実に行うことができ、広い範囲での吊荷の荷降ろしが可能となる固定式ケーブルクレーンの運転方法を提供できる。
【図面の簡単な説明】
【0016】
【図1】2基の固定式ケーブルクレーンの概要を示す図
【図2】2基の固定式ケーブルクレーンの入出力概略図
【図3】ノッチとバイナリ信号の対応関係を示す図
【図4】ダム12の垂直断面図
【図5】1号吊具17よび2号吊具19に吊り穴61を有するI型鋼57を吊り下げた状態を示す図
【図6】I型鋼57の張り出し部分87に吊荷67を吊った状態を示す図
【図7】1号吊具17よび2号吊具19に電動ホイスト71を有するI型鋼83を吊り下げた状態を示す図
【発明を実施するための形態】
【0017】
以下、図面に基づいて、本発明の第1の実施の形態について詳細に説明する。図1は、2基の固定式ケーブルクレーンの概要を示す図である。第1の実施の形態では、図1に示すように、第1の固定式ケーブルクレーンである1号固定式ケーブルクレーン1、第2の固定式ケーブルクレーンである2号固定式ケーブルクレーン3が、ダムの建設予定地である谷28の上方に並列に設置される。1号固定式ケーブルクレーン1は、建設予定のダム12(図4)の軸より下流に、2号固定式ケーブルクレーン3は、さらに下流に設置される。
【0018】
1号固定式ケーブルクレーン1は、一対の塔5、主索9、1号トロリ13等からなる。塔5は、谷28の左岸および右岸に設けられた基礎29上に固定される。主索9は、対向する塔5の間に懸架される。1号トロリ13は、走行部21、巻上ワイヤ25、第1の固定式ケーブルクレーンの吊具である1号吊具17、図示しない複数のワイヤやウインチ等からなる。走行部21は、図示しないワイヤやウインチにより、矢印Aに示すように主索9に沿って横行する。1号吊具17は、巻上ワイヤ25により、走行部21に吊り下げられる。1号吊具17は、巻上ワイヤ25や図示しないウインチにより、矢印Cに示すように上下方向に移動する。
【0019】
2号固定式ケーブルクレーン3は、一対の塔7、主索11、2号トロリ15等からなる。塔7は、谷28の左岸および右岸に設けられた基礎29上に固定される。主索11は、対向する塔7の間に懸架される。2号トロリ15は、走行部23、巻上ワイヤ27、第2の固定式ケーブルクレーンの吊具である2号吊具19、図示しない複数のワイヤやウインチ等からなる。走行部23は、図示しないワイヤやウインチにより、矢印Bに示すように主索11に沿って横行する。2号吊具19は、巻上ワイヤ27により、走行部23に吊り下げられる。2号吊具19は、巻上ワイヤ27や図示しないウインチにより、矢印Dに示すように上下方向に移動する。
【0020】
図2は、2基の固定式ケーブルクレーンの入出力概略図を示す。図3は、ノッチとバイナリ信号の対応関係を示す図である。1号固定式ケーブルクレーン1、2号固定式ケーブルクレーン3は、通常は手動により独立して制御される。通常の手動運転の場合は、図2に示すように、1号操作部31(操作レバー)からノッチ信号を出力し、矢印45に示すように1号制御盤33に動作信号を入力する。この動作信号は、1号トロリ13の横行速度および巻き速度に関する信号である。動作信号は、矢印47に示すように1号制御盤33から1号トロリ13に動作として出力される。
【0021】
2号操作部37(操作レバー)はアブソリュートエンコーダであり、10ビットのバイナリ信号を出力し、矢印49に示すように2号制御盤39に動作信号を入力する。この動作信号は、2号トロリ15の横行速度および巻き速度に関する信号である。動作信号は、矢印51に示すように2号制御盤39から2号トロリ15に動作として出力される。2号操作部37(操作レバー)のバイナリ信号は、1号操作部31(操作レバー)のノッチに対して、図3に示す数字を出力する。
【0022】
図4は、ダム12の垂直断面図である。ダム12を構築する際には、1号固定式ケーブルクレーン1と2号固定式ケーブルクレーン3とを用いてコンクリート等を運搬する。図4に示すように、1号固定式ケーブルクレーン1、2号固定式ケーブルクレーン3の荷降ろし位置は、それぞれ主索9、主索11の直下である。そのため、2号固定式ケーブルクレーン3は、ダム12の下流面14が主索11の直下まで構築された後は、荷降ろしができず、単独での使用が不可能となる。
【0023】
2号固定式ケーブルクレーン3を単独で使用しない場合、1号固定式ケーブルクレーン1と2号固定式ケーブルクレーン3とは、必要に応じて、合吊り運転を行うために同時に制御して運転される。同時に制御して運転する場合は、図2に示す矢印49の指令系統を切断し、2号固定式ケーブルクレーン3の独立運転を終了する。そして、図2に示すように、1号操作部31(操作レバー)から出力した動作信号を、矢印45、矢印53に示すように1号制御盤33、シンクロ制御盤43に入力する。この動作信号は、1号トロリ13の横行速度および巻き速度に関する信号である。1号制御盤33に入力された動作信号は、矢印47に示すように1号トロリ13に出力される。
【0024】
また、1号位置検出器35により1号吊具17の位置・高さを検出し、矢印55に示すようにシンクロ制御盤43に位置信号を入力する。この位置信号は、1号吊具17の横行位置および巻き位置に関する信号である。同時に、2号位置検出器41により2号吊具19の位置・高さを検出し、矢印57に示すようにシンクロ制御盤43に位置信号を入力する。この位置信号は、2号吊具19の横行位置および巻き位置に関する信号である。
【0025】
シンクロ制御盤43は、1号操作部31(操作レバー)から受け取った動作信号と、1号位置検出器35から受け取った位置信号と、2号位置検出器41から受け取った位置信号とに基づき、PID制御をして、1号吊具17と2号吊具19とが同期して移動するように最適な動作信号を出力する。動作信号は、矢印59に示すように2号制御盤39に入力される。2号制御盤39に入力された動作信号は、矢印51に示すように2号トロリ15に出力される。
【0026】
1号固定式ケーブルクレーン1と2号固定式ケーブルクレーン3とを同時に制御して運転する際には、2号固定式ケーブルクレーン3に対する速度指令の急激な変動を防止するため、ノッチ信号に対するバイナリ信号の変動範囲を前後20に限定する。例えば、1号操作部31で1ノッチの指令を出した場合、図3に示すように1ノッチに対応するバイナリ信号は34であるので、2号制御盤39から出力するバイナリ信号は、14〜54の間とする。
【0027】
なお、通常の手動運転とシンクロ制御盤43を用いた同時運転との切り替えや、1号吊具17と2号吊具19との誤差の表示等は、タッチパネル等の表示画面を用いて行われる。
【0028】
図5は、1号吊具17よび2号吊具19に吊り穴61を有するI型鋼57を吊り下げた状態を示す図である。1号固定式ケーブルクレーン1と2号固定式ケーブルクレーン3とを同時に制御して合吊り運転する場合、必要に応じて、図5に示すように、1号固定式ケーブルクレーン1の1号吊具17、2号固定式ケーブルクレーン3の2号吊具19に、第1のI型鋼であるI型鋼57を架け渡して吊り下げる。1号吊具17、2号吊具19は、それぞれ、I型鋼57に取り付けられた連結部材53、連結部材55に連結される。I型鋼57は、1号吊具17の側に張り出すように架け渡して吊り下げられる。
【0029】
I型鋼57は、ウェブ59に吊り穴61を有する。I型鋼57は、任意の吊り穴61に第3の吊具である吊具65が設置される。吊具65は、例えば、ワイヤとシャックルからなる。吊具65を設置する吊り穴61を自由に選択することにより、吊具65に吊り下げた吊荷67を、主索9や主索11の直下以外の場所に降ろすことが可能となる。なお、図5に示すように、1号吊具17と2号吊具19との間の位置の吊り穴61に吊具65を設置して吊荷67を吊る場合、図6に示すようなカウンターウェイト69は不要である。
【0030】
図6は、I型鋼57の張り出し部分87に吊荷67を吊った状態を示す図である。図6では、I型鋼57の張り出し部分87、すなわち、1号吊具17と2号吊具19との間から外れた位置の吊り穴61に吊具65が設置される。図6に示すように、I型鋼57の張り出し部分87に設置された吊具65に吊荷67を吊り下げる場合、I型鋼57を水平に保持するために、他方にカウンターウェイト69を吊る。
【0031】
このように、第1の実施の形態によれば、1号固定式ケーブルクレーン1の操作によって2号固定式ケーブルクレーン3が同時に動作するように制御して運転することにより、2基のケーブルクレーンによる合吊り運転を確実に行うことができる。また、I型鋼57の任意の吊り穴61に吊具65を設置することにより、吊荷67の荷降ろし範囲を拡大することができる。
【0032】
次に、第2の実施の形態について説明する。第2の実施の形態で使用する1号固定式ケーブルクレーン1、2号固定式ケーブルクレーン3は、第1の実施の形態と同一のものである。
【0033】
図7は、1号吊具17よび2号吊具19に電動ホイスト71を有するI型鋼83を吊り下げた状態を示す図である。図7の(a)図は、I型鋼83が水平に保たれた状態を示す。
【0034】
第2の実施の形態では、1号固定式ケーブルクレーン1と2号固定式ケーブルクレーン3とを同時に制御して運転する場合に、図5および図6に示すI型鋼57のかわりに、図7の(a)図に示すように、1号固定式ケーブルクレーン1の1号吊具17、2号固定式ケーブルクレーン3の2号吊具19に、第2のI型鋼であるI型鋼83を架け渡して吊り下げる。1号吊具17、2号吊具19は、それぞれ、I型鋼83に取り付けられた連結部材53、連結部材55に連結される。I型鋼83は、1号吊具17の側に張り出すように架け渡して吊り下げられる。
【0035】
I型鋼83は、2号吊具19側の端部付近に、角度検出器79が取り付けられる。また、I型鋼83は、電動ホイスト71が取り付けられる。電動ホイスト71は、走行部73、巻上装置75、第4の吊具である吊具77等からなる。走行部73は、矢印Eに示すようにI型鋼83に沿って横行する。巻上装置75は、吊具77を、矢印Fに示すように上下方向に移動させる。さらに、I型鋼83は、2号吊具19側の端部付近に、カウンターウェイト81が取り付けられる。
【0036】
第2の実施の形態では、I型鋼83に電動ホイスト71、角度検出器79、カウンターウェイト81を取り付けることにより、テルハとする。電動ホイスト71をI型鋼83に沿って移動させることにより、吊具77に吊り下げた吊荷85を、主索9や主索11の直下以外の場所に降ろすことが可能となる。テルハの操作は、吊荷85の荷降ろし場所にいる信号員が無線により目視で行うため、スライド型枠や内部構造物を移動させるような微調整を要する作業が可能となる。
【0037】
図7の(b)図は、1号吊具17と2号吊具19とに高低差が生じた状態を示す。電動ホイスト71がI型鋼83に沿って移動すると、1号吊具17と2号吊具19とにかかる荷重の変動により、ワイヤのたわみ具合が変化するため、巻上ワイヤ25と巻上ワイヤ27の長さが同じでも、1号吊具17と2号吊具19との位置が変動し、I型鋼83が水平でなくなる。
【0038】
角度検出器79は、I型鋼83の角度を検出し、図2に示すシンクロ制御盤43に無線により入力する。シンクロ制御盤43は、1号吊具17と2号吊具19とに高低差が生じた場合、角度検出器79の信号を加味して、2号吊具19の位置すなわち巻上ワイヤ27の巻具合を微調整することで、I型鋼83を水平に保つ。
【0039】
第2の実施の形態によれば、第1の実施の形態と同様に、1号固定式ケーブルクレーン1の操作によって2号固定式ケーブルクレーン3が同時に動作するように制御して運転することにより、2基のケーブルクレーンによる合吊り運転を確実に行うことができる。また、I型鋼83に電動ホイスト71を取り付けることにより、吊荷85の荷降ろし範囲を拡大することができるうえ、微調整が必要な精密作業にも対応可能となる。
【0040】
なお、第1および第2の実施の形態では、ダム12の建設現場を例として説明したが、本発明は、ダム以外の建造物の建設現場でも適用できる。また、1号固定式ケーブルクレーン1の操作レバーはノッチによる出力方式とし、2号固定式ケーブルクレーン3の操作レバーはアブソリュートエンコーダとしたが、2基の操作レバーの仕様はこの限りではない。
【0041】
第1の実施の形態のI型鋼57、第2の実施の形態のI型鋼83の吊下げ方法は、図5から図7に示す方法に限らず、I型鋼57、I型鋼83を1号吊具17および2号吊具19に確実に吊り下げられる方法であればよい。また、第1の実施の形態、第2の実施の形態では、I型鋼57、I型鋼83を吊具17の側に張り出すように架け渡して吊り下げたが、I型鋼の吊り下げ位置はこれに限らない。I型鋼は、吊具の位置から張り出さないように架け渡してもよい。
【0042】
以上、添付図を参照しながら、本発明の実施の形態を説明したが、本発明の技術的範囲は、前述した実施の形態に左右されない。当業者であれば、特許請求の範囲に記載された技術的思想の範疇内において各種の変更例または修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【符号の説明】
【0043】
1………1号固定式ケーブルクレーン
3………12号固定式ケーブルクレーン
9、11………主索
13………1号トロリ
15………2号トロリ
17………1号吊具
19………2号吊具
57、83………I型鋼
59………ウェブ
61………吊り穴
65、77………吊具
69、81………カウンターウェイト
71………電動ホイスト
79………角度検出器
87………張り出し部
【特許請求の範囲】
【請求項1】
並列に配置された第1の固定式ケーブルクレーンおよび第2の固定式ケーブルクレーンの運転方法であって、
前記第1の固定式ケーブルクレーンの吊具および前記第2の固定式ケーブルクレーンの吊具の位置信号を検出し、前記位置信号と前記第1の固定式ケーブルクレーンの動作信号とに基づいて、前記第1の固定式ケーブルクレーンの吊具と前記第2の固定式ケーブルクレーンの吊具とが同期して移動するように前記第2の固定式ケーブルクレーンに動作信号を出力することを特徴とする固定式ケーブルクレーンの運転方法。
【請求項2】
前記位置信号は、横行位置および巻き位置に関する信号であり、
前記動作信号は、横行速度および巻き速度に関する信号であることを特徴とする請求項1記載の固定式ケーブルクレーンの運転方法。
【請求項3】
ウェブに吊り穴を有する第1のI型鋼を、前記第1の固定式ケーブルクレーンの吊具と前記第2の固定式ケーブルクレーンの吊具とに架け渡して吊り下げ、前記吊り穴に第3の吊具を設置して吊荷を吊ることを特徴とする請求項1または請求項2に記載の固定式ケーブルクレーンの運転方法。
【請求項4】
前記第1のI型鋼を、前記第1の固定式ケーブルクレーンの吊具の側に張り出すように架け渡して吊り下げ、
前記第1のI型鋼の張り出し部分に前記吊荷を吊る際には、前記第1のI型鋼が水平に保持されるように前記第1のI型鋼にカウンターウェイトを吊ることを特徴とする請求項3記載の固定式ケーブルクレーンの運転方法。
【請求項5】
前記第1のI型鋼に代えて、電動ホイストおよび角度検出器を設置した第2のI型鋼を前記第1の固定式ケーブルクレーンの吊具と前記第2の固定式ケーブルクレーンの吊具とに架け渡して吊り下げ、
前記電動ホイストに第4の吊具を設置して吊荷を吊り、
前記電動ホイストが前記第2のI型鋼に沿って横行することによって生じる前記第1の固定式ケーブルクレーンの吊具と前記第2の固定式ケーブルクレーンの吊具との高低差を前記角度検出器を用いて検出し、前記第2のI型鋼が水平に保持されるように前記第2の固定式ケーブルクレーンの吊具の位置を微調整することを特徴とする請求項3または請求項4に記載の固定式ケーブルクレーンの運転方法。
【請求項1】
並列に配置された第1の固定式ケーブルクレーンおよび第2の固定式ケーブルクレーンの運転方法であって、
前記第1の固定式ケーブルクレーンの吊具および前記第2の固定式ケーブルクレーンの吊具の位置信号を検出し、前記位置信号と前記第1の固定式ケーブルクレーンの動作信号とに基づいて、前記第1の固定式ケーブルクレーンの吊具と前記第2の固定式ケーブルクレーンの吊具とが同期して移動するように前記第2の固定式ケーブルクレーンに動作信号を出力することを特徴とする固定式ケーブルクレーンの運転方法。
【請求項2】
前記位置信号は、横行位置および巻き位置に関する信号であり、
前記動作信号は、横行速度および巻き速度に関する信号であることを特徴とする請求項1記載の固定式ケーブルクレーンの運転方法。
【請求項3】
ウェブに吊り穴を有する第1のI型鋼を、前記第1の固定式ケーブルクレーンの吊具と前記第2の固定式ケーブルクレーンの吊具とに架け渡して吊り下げ、前記吊り穴に第3の吊具を設置して吊荷を吊ることを特徴とする請求項1または請求項2に記載の固定式ケーブルクレーンの運転方法。
【請求項4】
前記第1のI型鋼を、前記第1の固定式ケーブルクレーンの吊具の側に張り出すように架け渡して吊り下げ、
前記第1のI型鋼の張り出し部分に前記吊荷を吊る際には、前記第1のI型鋼が水平に保持されるように前記第1のI型鋼にカウンターウェイトを吊ることを特徴とする請求項3記載の固定式ケーブルクレーンの運転方法。
【請求項5】
前記第1のI型鋼に代えて、電動ホイストおよび角度検出器を設置した第2のI型鋼を前記第1の固定式ケーブルクレーンの吊具と前記第2の固定式ケーブルクレーンの吊具とに架け渡して吊り下げ、
前記電動ホイストに第4の吊具を設置して吊荷を吊り、
前記電動ホイストが前記第2のI型鋼に沿って横行することによって生じる前記第1の固定式ケーブルクレーンの吊具と前記第2の固定式ケーブルクレーンの吊具との高低差を前記角度検出器を用いて検出し、前記第2のI型鋼が水平に保持されるように前記第2の固定式ケーブルクレーンの吊具の位置を微調整することを特徴とする請求項3または請求項4に記載の固定式ケーブルクレーンの運転方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−111609(P2012−111609A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−262773(P2010−262773)
【出願日】平成22年11月25日(2010.11.25)
【出願人】(000001373)鹿島建設株式会社 (1,387)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月25日(2010.11.25)
【出願人】(000001373)鹿島建設株式会社 (1,387)
【Fターム(参考)】
[ Back to top ]