
圃場内利用コンベアー搬送装置
【課題】 従来のコンベアーは、圃場に持ち込み利用するには、一枚の圃場でも、凸凹、うねり、土質の軟弱があり、傾斜畑も多く、平行維持は困難である。本発明は主に畝の谷に設置し、頻繁に移設しながら利用することに価値があり、傾斜角度調整手段、連結延長手段、搬送方向変更手段、傾斜畑に対応する手段、畝又は畝上の作物を跨ぎ、多くの利用阻害要因を克服して、一基2基3基と一直線に連結して設置する必要がある。
【解決手段】 傾斜調整手段、脚幅を調整手段、同脚垂直長さ調整手段、タイヤの転動方向を変更する手段、コンベアー旋回手段、スライド手段、ローラーコンベアー上を走行する動力式押し台車、等々で解決する。
【解決手段】 傾斜調整手段、脚幅を調整手段、同脚垂直長さ調整手段、タイヤの転動方向を変更する手段、コンベアー旋回手段、スライド手段、ローラーコンベアー上を走行する動力式押し台車、等々で解決する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、圃場内に持ち込み、作業道及び畝間を移動しながら、圃場内全面と作業道又は農道(農道は道交法上公道に分類されており、以下、一般公道を含む意味で表示)間を結び、空容器の搬入、収穫物の搬出等の搬送に利用する圃場内利用コンベアー搬送装置に関する。
【背景技術】
【0002】
従来のコンベアー装置は、工場内又は物流基地等で、固い床面に直接設置するか、架台又は専用の支持脚に固定して用い、一度傾きの調整をすると、頻繁に再調整する事は無く、また、其の様に開発・発展してきたものである。
【0003】
作業現場で簡易に設置、2基3基4基と複数基連結して使用する場合もあるが、一度設置して傾斜の調整をすると、作業完了まで頻繁に移設することや、傾斜角度を再調整することは少ない。
【0004】
圃場で利用する例で、農道の傍の圃場内に集めた収穫物を、動力駆動するベルトコンベアーで斜め上方に搬送し、運送トラックに積み込む例や、荷台がリフトアップする機能を有する車両で収穫物を圃場より搬出してきて、公道に留め置きの運送トラックに積み替えする際に、リフトアプした車両から、ローラーコンベアーを利用してトラックに送り込む例があるが、いずれも、圃場内全面での利用には至っていない。
【0005】
圃場内で利用する例として、一般的には1基3メートルの長さのローラーコンベアーを使用するが、2基3基4基と連結して利用の場合は収穫した後の畝の上に並べるか、プラスチック空箱の底面を上にして架台として利用、当該架台上にコンベアーを直列に並べて利用する場合も有る。
【0006】
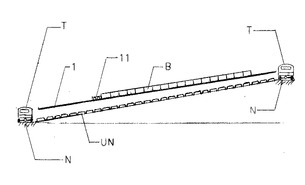
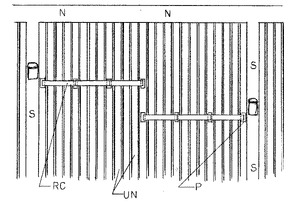
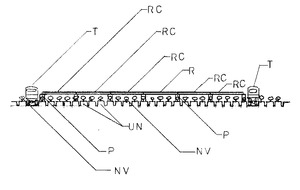
以下、図16、図17により従来の技術で、出荷サイズに成長したものを選抜収穫する圃場内利用例を説明する。未収穫作物が邪魔に成るので、プラスチックの空箱Pの底面を上にして台として畝の上に設置し、当該台の上にローラーコンベアーRCを3基直列に配列した例で、作業道に乗り入れたトラックの方向に搬出する。畝の高さは不均一で、畝上面の凸凹とあいまって、コンベアーの長手方向(物品の搬送方向を表わし、以下このように表現する)及び同短手方向(長手方向と直行する平面方向表わし、以下このように表現する)の水平設置は時間と手間を要し、未収穫の作物が邪魔になって一直線の通りが悪い場合が多く、連結部で折れたり、捻りがでたり、片方が開いたりするので、人力の介添えを必要とする場合が多く、収穫が進むと共に移動し、延長する必要が有る本装置を利用する事は、現実面で困難が多く、人力、一輪車、運搬専用車を利用している。
【発明の概要】
【発明が解決しようとする課題】
【0007】
以上に述べた従来のコンベアーを圃場内で利用するに必要な基本的な要件は、長手方向及び短手方向の水平維持及び、個人差が有るが、腰の高さを中心に作業可能な高さ保持である。実務上無動力・重力式コンベアー(ローラーコンベアー、ボールコンベアー等)の場合は搬送方向に下り勾配にするほうが人力で押す労力が省略できて望ましいが、置くと直ぐに動き出し、作業の妨げとなる場合も有るが、コンベアーを両方向平行に保ち、コンベアー上に沢山の搬送物を載せた後、長手方向に傾斜させれば、荷物は重力で搬送できる、が例えば傾斜畑での利用で、斜面に平行に設置すると、勝手に動き出して搬送物が加速しすぎる危険がある。また、1基2基3基と直列に連結して使用する場合の必要な要件は、連結端部が重なったり短かったりする事無く、また折れることなく簡単・迅速に一直線に連結(強固に連結する場合と、両端がフリーに連続する場合がある)できることであるが、主に畝溝や作業道に平行して移動する本発明の装置が移動していく方向と物品の搬送方向は、同じ圃場内にあっても変化する場合が多く、当該装置自体が畝を越えて斜め又は直角に移動する必要も発生する。また、コンベアー1基の長さが畝幅のピッチの整数倍に一致する事は稀で、複数基連結使用の場合、コンベアー本体連結端部が重なったり短い場合が多々発生する。一方作業現場では、同じ作物でも産地により生産方法が異なり、土質にも関連するが畝の高さ及び畝の幅、畝溝の幅が異なり、同じ産地で同じ生産者で同じ作物でも定植の時期の違いで畝幅が異なる地域もあり、作物が違えば、また異なる条件となる。一般的には畑は水田と異なり、傾斜地が多く、一枚の畑でも傾斜角度は均一ではなくうねっており、しかも土の表面は凸凹で、土質軟弱の度合いも異なり、雨が降ると土壌条件は更に変化していく。また、畑と農道に段差が有る場合も多く、出入り口が一箇所しかない場合などもあり、正に圃場の条件は千変万化である。一斉収穫する場合と選抜収穫する場合とでは、本装置の使用条件が異なる。更に、コンベアー本体の作業する人々に対する高さは、個人差はあるが、腰の高さ付近が最適であり、作業者の方に傾くほうが望ましい作業状態である。但し、一直線に連結できない場合は、人力(人力のみにより場合と、ボールコンベアーを併用して搬送方向を変える場合などがある)により次のコンベアーに積み替え作業する事を積極的に取り入れる事とし、また、コンベアーの連結部分が重なって、且つ、高いほうから低い方向に搬送する場合は、重なったまま使用する方法を選択する事も多々発生する。但し、動力駆動コンベアー(ベルトコンベアー等)の長手方向の傾きは、高さ制限以外、余り問題は発生しない。
【0008】
本発明は、このような従来のコンベアーが有する利用上の必要条件を整え、圃場が有する阻害条件を、多数の問題解決手段の結合の効果で克服しようとするものであり、新たに可能と成った機能を積極活用して、圃場内搬送作業を省力かすることを目的とするものである。
【課題を解決するための手段】
【0009】
そして、本発明は上記目的を達成するために,コンベアー本体の長手方向及び短手方向の傾斜角度調整手段を有するコンベアー本体を支持する主支持台を、圃場内に直接設置して前記主支持台を支持する従支持台とを旋回手段を有して連結する構成とした。
【0010】
また、第2の課題解決手段は、従支持台の圃場に接地する脚又はタイヤの水平方向の幅調整手段、垂直方向の支持長さ(高さ)調整手段、及び、タイヤを利用する場合は、タイヤの転動方向を少なくとも180度変更調整可能な手段を有する構成としたものである。
【0011】
また、第3の課題解決手段は、コンベアー本体が、当該本体を支持する主支持台に対し、長手方向にスライドする手段を有する構造とし、主支持台との支持位置を変更できるようにした。
【0012】
また、第4の課題解決手段は、無動力・重力式コンベアーを利用する場合、当該コンベアー本体に、長手方向に平行な両端面の片側又は両側に落下防止ガイドを設け、当該落下防止ガイドと短手方向の傾斜を変える機能を併用して利用する落下防止兼摩擦抵抗ガイドを設けた。
【0013】
また、第5の課題解決手段は、ローラーコンベアーを利用する場合、ローラーに噛み合いながらローラーコンベアー上を長手方向に走行する手段を有する動力式押し台車を配置した。
【0014】
また、第6の課題解決手段は、主支持台と従支持台の間に、主支持台が従支持台に対し、垂直方向に上下移動する上下移動支持台を配設し、当該上下移動支持台と従支持台を旋回手段を有して連結した。
【0015】
また、第7の課題解決手段は、コンベアー本体の片方端又は両端の下面で短手方向の中心を支持する一本足の脚を設け、同脚は長さ(高さ)調節手段を有し、かつ、ユニバーサル機能を有して取り付けた。
【0016】
また、第8の課題解決手段は、ボールコンベアーを主支持台に配設し、主支持台と従支持台を旋回機能を省略して配設し、ボールコンベアー上面に、搬送物の流れの方向を変える方向変換ガイド板を同面上で移設可能にして設けた。
【0017】
第1の課題解決手段による作用は、後述する従支持台で調整した高さ及び同従支持台の水平を元に、移動の度に、生ずる傾きの変化を再調整し、作業の利便性に合わせて積極的に二つの傾斜角度を変更する事を可能にする。旋回機能は、圃場内移動する場合に、搬送方向の角度を任意に選択できる。また、2基3基4基と連結して使用する場合は、畝立てのピッチが問題で、コンベアー本体一基の長さが当該ピッチの整数倍であることはまれで、連結端部に長さの過不足を生じると連結の妨げとなるが、例えば2基を畝と直角方向に、重なる部分を最小にして配置した後、1基を移動させながら2基を旋回させると、重なる部分がゼロとなる畝とコンベアー長手方向の角度が二つあり、一直線に連結する事ができる。
【0018】
また、第2の課題解決手段による作用は、畝幅、畝溝幅、畝の高さ、畝上の作物の有無、及び作業に最適な従支持台、即ち主支持台の高さを調整する効果を発揮し、傾斜畑に有っては、従支持台、即ち主支持台の大まかな水平を調整保持できる。また、異なる畝幅を跨いで利用可能で、タイヤ利用の場合は走行方向を転換できる。
【0019】
また、第3の課題解決手段による作用は、2基3基4基と連結して利用する場合、畝立てのピッチが問題で、一基の長さが当該ピッチの整数倍であることはまれで、連結端部に長さの過不足を生じ連結の妨げとなるが、例えば2基を畝と直角方向に配置し、連結端が重複又は短い場合はスライドさせて簡単に前記課題を解決する効果を発揮する。前述の旋回機能による連結と異なり、畝立て方向に対する搬送方向の角度は任意に選択できる効果も発揮する。
【0020】
また、第4の課題解決手段による作用は、無動力・重力式コンベアーを利用する場合、長手方向に傾斜が残る状態で短手方向は水平の場合は、当該コンベアーに載せた荷物は長手方向の下り方向に動き始めるが、動くと困る場合はストッパーを掛けるか人手で押さえておく必要が有るが、落下防止兼摩擦抵抗ガイドを設けることで、短手方向に若干(経験による)傾斜させ、角度を調節して、当該ガイドと荷物が適度の摩擦抵抗の元に接触しておれば、落下防止、長手方向の移動防止、及び、作業者の方に傾けていると作業がしやすくでき、コンベアーに載せた後水平にすれば、重力で動き出し、無人で搬送できる。
【0021】
また、第5の課題解決手段による作用は、無動力のローラーコンベアーを利用する場合、当該コンベアー上を走行する手段を有する動力式押し台車を利用する事で、コンベアーが長手方向に水平のときは搬送方向に荷物を押し、傾斜のある場合で、搬送方向が上りの場合は押し上げ、下りの場合は押しながら下がり、同台車が停止中は、傾斜方向に重力で移動する事を阻止するストッパー役に利用できる。
【0022】
また、第6の課題解決手段による作用は、無動力・重力式コンベアー利用の場合、同コンベアー本体の高さ調整手段により、作業者に対する最適な高さを、従支持体が有する同機能とは別に提供できる。また、平坦な圃場で利用する場合で、かつ、長手方向に傾斜を付けて2基3基4基と連結利用する場合は、傾斜方向及び平行の切り替えが行える。また傾斜畑では高いほうに配置する基を順次低くして、傾斜を緩くするか水平、又は逆勾配に調整利用できる。但し、動力式コンベアーにあっては、作業者に最適な高さ調整にのみ有用である。
【0023】
また、第7の課題解決手段による作用は、コンベアー本体の片側端又は両端の下面で短手方向の中心に垂直加重を受ける一本足の脚を設け、同脚をユニバーサル機構で連結し、脚の長さを伸縮可能にする事で、当該コンベアー本体の傾きや同端部の高さに対応して垂直加重を受け、当該コンベアーの単位長さ当たりの負荷を大きくする事が出来る。また、ユニバーサル機構は当該脚をコンベアー本体下面に格納するに便利である。更に、長手方向の角度維持機能も発揮する。
【0024】
また、第8の課題解決手段による作用は、コンベアー本体連結部で搬送方向に折れが生ずる場合、人手による積み替え作業が必要と成るが、人手を省略して、任意に搬送方向を変更できる。
【発明の効果】
【0025】
上述したように本発明の圃場内利用コンベアー装置は、コンベアー本体の長手及び短手方向の傾きを、気泡式水平器等を基準に調整可能で、旋回機能で搬送方向も変更容易で、また、旋回機能は2基3基4基と直列に連結容易な圃場内利用コンベアー搬送装置を提供できる。
【0026】
また、従支持台は、同支持台の高さ調整を調整し、傾斜畑にあっては水平に調整し、畝を跨いで設置する脚及びタイヤの水平距離幅を調整し、タイヤの転動方向を変更して、畝を斜め又は直角に移動できる効果を発揮する。
【0027】
また、スライド手段は、畝幅に影響を受けず、かつ、前述の二つの角度しか選べない旋回機能利用による連結の場合と異なり、搬送方向は任意に選択できて、2基3基4基と複数基連結を容易にする効果を発揮する。
【0028】
また、落下防止兼抵抗ガイドは、作業者の利便性を目的にコンベアー本体を短手方向に傾斜をさせ際に、落下防止に寄与し、また、無動力・重力式コンベアーを利用する場合で長手方向に傾斜して短手方向は平行の場合、ストッパーを用いるか人手で押さえないと、荷物が自重で傾斜方向に動くが、短手方向に傾斜をさせ落下防止兼抵抗ガイドと接触させて動きを抑制できる効果を発揮する。
【0029】
また、無動力重力式ローラーコンベアー上を走行する押し台車は、コンベアーを水平に設置した場合はもとより、傾斜している場合でも、搬送方向が上りの場合は押し上げ、下りの場合は押しながら下がり、ストッパーの役目も果たすことができ、作業者の歩行数を低減する効果を発揮する。
【0030】
また、従支持台の高さ調整機能とは別に、コンベアー本体の高さ調整機能を設けると、圃場が平坦な場合、従支持台で調整した高さを基準に、補助的に高さを変更調整し、作業者に最適な高さを提供できる。また無動力・重力式コンベアー利用で、空箱を圃場に搬入し、収穫箱を搬出する場合等に、長手方向の傾斜を切り替えて、自重で搬送させる傾きを変更調整する効果を発揮し、圃場が傾斜畑の場合は傾斜及び高さを調整した従支持台を基準に、補助的に高さを調整し、従支持台で完了できない傾斜の残り角度を穏やかにしたり、平行にしたり、逆勾配にする効果を発揮する。一枚の畑でも、凸凹でうねりのある圃場を移動しながら利用する本装置は、常に調整の必要が有り、従来と異なり、格段と簡単容易に調整が出来る。
【0031】
また、一本足の脚はコンベアー本体の長手方向の傾き、短手方向の傾き及び同端部の高さに順応して垂直加重を受けてコンベアー本体の単位長さ当たりの負荷を大きくし、長手方向の傾斜角度保持機能を有し、当該コンベアー下面に格納を容易にする効果を発揮する。
【0032】
また、ボールコンベアーを搬送方向変更の連結部に配し、同コンベアー上面に搬送方向変更ガイド板を移設可能に設け、搬送方向を選択自由に変更できる効果を発揮する。
【図面の簡単な説明】
【0033】
【図1】本発明の実施形態を示す搬送装置の主支持台の概略配置側面図
【図2】同搬送装置の主支持台の概略配置正面図
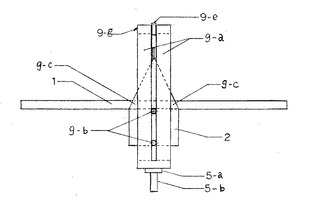
【図3】同搬送装置の従支持台の部分断面の概略配置側面図
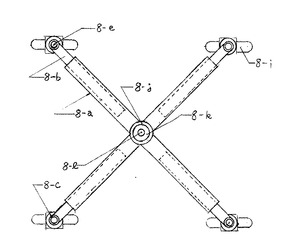
【図4】同搬送装置の従支持台の概略配置平面図
【図5】同搬送装置で吊り上げ上下動式1例目の概略配置側面図
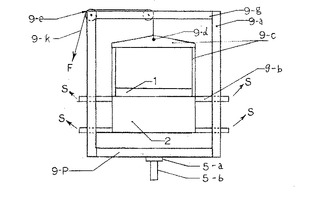
【図6】同搬送装置で吊り上げ上下動式1例目の概略配置正面図
【図7】同搬送装置で吊り上げ上下動式2例目の概略配置正面図
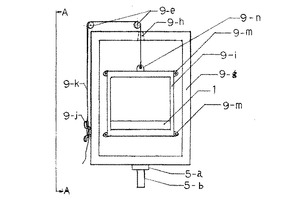
【図8】同搬送装置で吊り上げ上下動式2例目の概略配置側面図(矢視A−A)
【図9】ローラーコンベアー短手方向を作業者方向に角度α傾け正面図
【図10】1本足の脚の正面図
【図11】1本足の脚の側面図
【図12】押し台車の車輪と噛み合うローラーの部分断面の側面図
【図13】傾斜畑で傾斜の残った連結コンベアー上の箱を押し台車で押す側面図
【図14】ボールコンベアーで搬送方向を転換する平面配置図
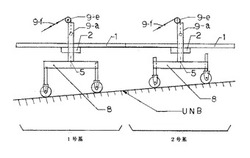
【図15】傾斜畑で本発明の搬送装置2基を連結した概略側面図
【図16】従来のローラーコンベアー3基を直列に並べた概観平面図
【図17】従来のローラーコンベアー3基を直列に並べた概観側面図
【発明を実施するための形態】
【0034】
以下、本発明の実施の形態を図1〜図15に基づいて説明する。
【0035】
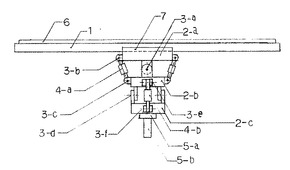
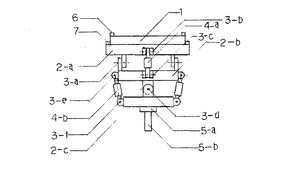
図においては、1はコンベアー本体、2はコンベアー本体を支持する主支持台で、スライド支持台2−a、長手方向傾斜調整台2−b、短手方向傾斜調整台2−cで構成し、支持ブラケット及び回動支持ピン3で連結しているが、3者の上下の位置関係は入れ替えてもよい。コンベアー本体長手方向の傾きは、回動中心3―aと一対のコンベアー本体長手方向の傾き調整具4−aを伸縮させて、作業の総ての段階で変更調整可能である。また、コンベアー本体短手方向の傾きは、回動中心3―dと一対のコンベアー本体短手方向の傾き調整具4―bを伸縮させて、作業の総ての段階で変更調整可能である。更に主支持台下部に設けた旋回軸5を中心に、コンベアー本体は旋回可能で、搬送方向を作業の総ての段階で変更することが出来る。
【0036】
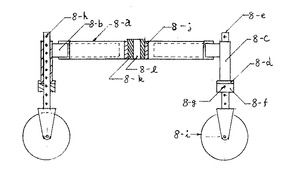
8は、圃場内に直接接地して主支持台を支持する従支持台で、従支持台中心に軸受け8−kを設け、旋回軸5は旋回軸穴8−mにカン合する。水平方向伸縮フレーム8―bは主フレーム8―aに対して伸縮する事で、脚又はタイヤの水平距離を調整して畝幅に合わせる事が出来る。また、垂直方向伸縮フレーム8―eは垂直方向支持フレーム8―cに対して伸縮する事で、主フレーム8―aの高さ調整を可能とし、また傾斜畑では、垂直方向伸縮フレーム高さを個別に調整して、主フレーム8―aを平行に調整できる。タイヤ利用の場合、通常は畝溝に沿って移動するが、本装置自体を圃場に搬入する際や、畝を斜め又は直角に移動する際に、タイヤの転動方向を変更して移動を可能にした。
【0037】
9は主支持台吊り上げ式門型支持台で、回転軸5の上に門型支持台下部横梁9−pを設け、同横梁両端上向きに、主支持台上下動ガイド及びスイングガイド兼用吊り上げ支柱9―aを配設し、当該支柱の上部梁9−g中心より主支持台吊り上げロープ9―kで主支持台の吊り上げブラケット9―cを台付けフック穴9―dを介して吊り上げる事で、主支持台の吊り上げブラケット9―cと連結している主支持台2を吊り上げる。9―bは主支持台の上下動ガイド及びスイングガイド棒で、主支持台上下動ガイド及びスイングガイド兼用吊り上げ支柱9―aと当該ガイド棒9―bにガイドされながら自由に主支持台は上下し、かつ、従支持台8の短手方向の傾きを自重で水平に戻そうと作用し、強制的に傾けた後、例えば支柱9―aとガイド棒9―bを固定すれば、必要に応じ作業に望ましい角度を選択できる。即ち、ロープ吊り上げ方式は、コンベアー本体の高さ調節機能を有し、かつ、短手方向の傾き調整機能を有しているので、短手方向傾斜調整台2−cの機能を果たし、主支持台2から短手方向傾斜調整台2−cを省略できる。
【0038】
また、主支持台吊り上げ具9−iは主支持台2と主支持台の吊り上げブラケット9―cを一体化し、スライド機能のみを残したもので、当該具9−iの六面の角8箇所に主支持台横引きロープ取り付けブラケット9―mを設け、同ブラケット9―mと主支持台吊り上げ式門型支柱の任意の箇所とを主支持台横引きロープ9―fで結び、引っ張る方向と強さを加減して、コンベアー本体の長手及び短手方向の傾斜角度を調整する。即ちこの例の吊り上げ方式は、ロープで吊り上げる事で、長手及び短手方向の傾斜角度調整機能及び、支柱9―gに干渉されない範囲で旋回機能を果たすことが出来き、主支持台2から長手方向傾斜調整台2−b、短手方向傾斜調整台2−c及び旋回機能を省略できる。但し、本例では主支持台吊り上げ式門型支柱9―gの如く、門型で表記したが、コ型でも良く、また、吊り上げ方式ではなく、押し上げ手段で主支持台2を上下させる方法でもよい。
【0039】
ここで、Vは収穫物を表わし、ローラーコンベアー本体を短手方向、且つ作業者の方向に角度α傾けた状態では、作業者はコンベアー上の箱Bに詰める作業、又は収穫物Vを詰めた箱Bをコンベアー上に載せる作業は、角度αが、ゼロまたはマイナスの場合よりも楽に行える。また、長手方向に傾斜が残り、かつ角度αがゼロの状態で前記作業を行う場合、箱Bは下り勾配に動き出すが、角度αを設けて調整し、箱Bを落下防止兼摩擦抵抗ガイド6に接触させる事で、前記の作業性の向上及び箱Bは下り勾配に動き出すことを防止することを可能にする。
【0040】
また、10は一本足の脚で、10−aはユニバーサル連結部、10−bは脚の伸縮部で、コンベアー本体1の端部下面の短手方向の中央に設け、10−eは脚先端の接地面積を大きくするフランジ、10−fは脚接地位置のズレを止めるスパイクである。当該脚10は、無負荷状態でコンベアー本体1の姿勢を決めた後、当該コンベアー本体の二つの傾斜角度及び高さに順応して垂直に設置し、垂直加重を受けることでコンベアー本体の単位長さの負荷を大きくすると同時に、長手方向の傾斜角保持の役割も果たすことが出来る。
【0041】
また、11は動力式押し台車で、1―bはローラーコンベアーのローラー、動力式押し台車の駆動輪11−bは、前述のローラー1−bに噛み合いながら進む駆動輪で、同ローラー上を走行し、搬送方向が水への場合は押し、上り勾配の場合は押し上げ、下り勾配の場合は押しながら下がり、停止中はストッパー役を果たすことが出来る。
【0042】
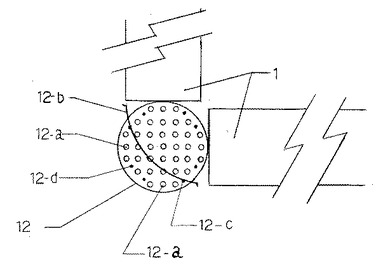
また、12はボールコンベアー本体で、12−bは搬送方向転換ガイド板、12−cは同板12−bに取り付けた支持支柱で、ボールコンベアー本体12の上面に設けた差込穴12−dに差込、同板12−bの角度決めと固定を行う。これなの機能は極めて簡単に搬送方向を変換できる。
【0043】
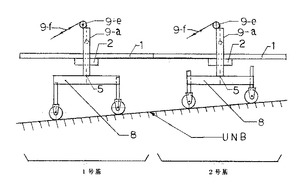
以下、上記構成の動作を図15で説明する。傾斜畑に本発明の圃場内利用コンベアー装置(無動力・重力式)を二基連結使用する場合で、一号基二号基の従支持台8は傾斜に合わせ、脚部を段違いに調整し、両基の高さは可能な限り同じとする。次に両基を連結し、高さ調整手段吊り上げロープ9−kで作業者に最適の高さと水平を調整する。重力を利用して傾斜方向に搬送する場合は片方又は両基の高さ調整機能で傾斜を付ける。作業が進むと順次移動するが、圃場の条件変化に対応して傾きや高さを調整し、搬送方向が折れる場合は、人力により積み替えるかボールコンベアー12を利用し、搬送距離に応じて複数基導入する。但し、以上例示してきたコンベアーの支持点はコンベアー本体1の中心を基準に記載したが、片方の端部を支持する片持ち支持を排除するものではない。
【符号の説明】
【0044】
1 コンベアー本体
1―a ローラーコンベアー本体フレーム
1―b ローラー
1―c ローラー支持軸
2 主支持台
2―a スライド支持台
2―b 長手方向傾斜調整支持台
2―c 短手方向傾斜調整支持台
2―d 主支持台吊り下げ式門型支持台
3 支持ブラケット及び回動支持ピン
3―a コンベアー本体長手方向の傾き回動中心
3―b コンベアー本体長手方向の傾き調整具の上部連結
3―c コンベアー本体長手方向の傾き調整具の下部連結
3―d コンベアー本体短手方向の傾き回動中心
3―e コンベアー本体短手方向の傾き調整具の上部連結
3―f コンベアー本体短手方向の傾き調整具の下部連結
4―a コンベアー本体長手方向の傾き調整具
4―b コンベアー本体短手方向の傾き調整具
5 旋回軸
5―a 垂直加重受けスラスト軸
5―b 旋回軸中心を保持する回転軸
6 落下防止兼摩擦抵抗ガイド
7 コンベアー本体脱落防止ガイド
8 従支持台
8―a 主フレーム
8―b 水平方向伸縮フレーム
8―c 垂直方向支持フレーム
8―d 垂直方向支持フレーム下部、高さ調整リング受けフランジ
8―e 垂直方向伸縮フレーム
8―f 高さ調整リング
8―g 高さ調整リング位置決めピン穴及びピン
8―h 垂直方向伸縮フレーム高さ調整ピン穴
8―i タイヤ(脚の図は省略した)
8―j 軸受箱
8―k 軸受
8―m 旋回軸ピン穴
9 主支持台吊り上げ式門型支持台
9―a 主支持台上下動ガイド及びスイングガイド兼用吊り上げ支柱
9―b 主支持台の上下動ガイド及びスイングガイド棒
9―c 主支持台の吊り上げブラケット
9―d 台付ロープ取り付け穴
9―e 滑車
9―f 主支持横引きロープ
9―g 主支持台吊り上げ式門型支柱上部横梁
9―h 主支持台吊り上げロープ貫通穴
9―i 主支持台吊り上げ具
9―j ロープ固縛角型具
9―k 主支持台吊り上げ高さ調整ロープ
9―m 主支持台横引きロープ取り付けブラケット(8箇所)
9―n 主支持台吊り上げロープ取り付けブラケット
9−p 主支持台吊り上げ式門型支柱下部横梁
10 一本足の脚
10−a ユニバーサル連結部
10−b 脚伸縮部
10−c 脚長位置決めピン
10−d 脚長位置決めピン穴
10−e 接地面積増大フランジ
10−f スパイク
11 押し台車
11−a 押し台車の押し面
11−b 押し台車の駆動輪
11−c ローラーコンベアーのローラー
11−d 押し台車の底面
12 ボールコンベアー本体
12−a ボール
12−b 搬送方向転換ガイド板
12−c 搬送方向転換ガイド板支持支柱
12−d 搬送方向転換ガイド板支持支柱差込穴
V 収穫した野菜
NV 未収穫野菜(畝上に残っている)
B 収穫した野菜を入れる箱
α ローラーコンベアー本体が水平に対する短手方向の傾斜角度
N 農道
S 作業道
T トラック
UN 畝
UNB 畝溝底
P プラスチックの空箱
RC 従来のローラーコンベアー
【技術分野】
【0001】
本発明は、圃場内に持ち込み、作業道及び畝間を移動しながら、圃場内全面と作業道又は農道(農道は道交法上公道に分類されており、以下、一般公道を含む意味で表示)間を結び、空容器の搬入、収穫物の搬出等の搬送に利用する圃場内利用コンベアー搬送装置に関する。
【背景技術】
【0002】
従来のコンベアー装置は、工場内又は物流基地等で、固い床面に直接設置するか、架台又は専用の支持脚に固定して用い、一度傾きの調整をすると、頻繁に再調整する事は無く、また、其の様に開発・発展してきたものである。
【0003】
作業現場で簡易に設置、2基3基4基と複数基連結して使用する場合もあるが、一度設置して傾斜の調整をすると、作業完了まで頻繁に移設することや、傾斜角度を再調整することは少ない。
【0004】
圃場で利用する例で、農道の傍の圃場内に集めた収穫物を、動力駆動するベルトコンベアーで斜め上方に搬送し、運送トラックに積み込む例や、荷台がリフトアップする機能を有する車両で収穫物を圃場より搬出してきて、公道に留め置きの運送トラックに積み替えする際に、リフトアプした車両から、ローラーコンベアーを利用してトラックに送り込む例があるが、いずれも、圃場内全面での利用には至っていない。
【0005】
圃場内で利用する例として、一般的には1基3メートルの長さのローラーコンベアーを使用するが、2基3基4基と連結して利用の場合は収穫した後の畝の上に並べるか、プラスチック空箱の底面を上にして架台として利用、当該架台上にコンベアーを直列に並べて利用する場合も有る。
【0006】
以下、図16、図17により従来の技術で、出荷サイズに成長したものを選抜収穫する圃場内利用例を説明する。未収穫作物が邪魔に成るので、プラスチックの空箱Pの底面を上にして台として畝の上に設置し、当該台の上にローラーコンベアーRCを3基直列に配列した例で、作業道に乗り入れたトラックの方向に搬出する。畝の高さは不均一で、畝上面の凸凹とあいまって、コンベアーの長手方向(物品の搬送方向を表わし、以下このように表現する)及び同短手方向(長手方向と直行する平面方向表わし、以下このように表現する)の水平設置は時間と手間を要し、未収穫の作物が邪魔になって一直線の通りが悪い場合が多く、連結部で折れたり、捻りがでたり、片方が開いたりするので、人力の介添えを必要とする場合が多く、収穫が進むと共に移動し、延長する必要が有る本装置を利用する事は、現実面で困難が多く、人力、一輪車、運搬専用車を利用している。
【発明の概要】
【発明が解決しようとする課題】
【0007】
以上に述べた従来のコンベアーを圃場内で利用するに必要な基本的な要件は、長手方向及び短手方向の水平維持及び、個人差が有るが、腰の高さを中心に作業可能な高さ保持である。実務上無動力・重力式コンベアー(ローラーコンベアー、ボールコンベアー等)の場合は搬送方向に下り勾配にするほうが人力で押す労力が省略できて望ましいが、置くと直ぐに動き出し、作業の妨げとなる場合も有るが、コンベアーを両方向平行に保ち、コンベアー上に沢山の搬送物を載せた後、長手方向に傾斜させれば、荷物は重力で搬送できる、が例えば傾斜畑での利用で、斜面に平行に設置すると、勝手に動き出して搬送物が加速しすぎる危険がある。また、1基2基3基と直列に連結して使用する場合の必要な要件は、連結端部が重なったり短かったりする事無く、また折れることなく簡単・迅速に一直線に連結(強固に連結する場合と、両端がフリーに連続する場合がある)できることであるが、主に畝溝や作業道に平行して移動する本発明の装置が移動していく方向と物品の搬送方向は、同じ圃場内にあっても変化する場合が多く、当該装置自体が畝を越えて斜め又は直角に移動する必要も発生する。また、コンベアー1基の長さが畝幅のピッチの整数倍に一致する事は稀で、複数基連結使用の場合、コンベアー本体連結端部が重なったり短い場合が多々発生する。一方作業現場では、同じ作物でも産地により生産方法が異なり、土質にも関連するが畝の高さ及び畝の幅、畝溝の幅が異なり、同じ産地で同じ生産者で同じ作物でも定植の時期の違いで畝幅が異なる地域もあり、作物が違えば、また異なる条件となる。一般的には畑は水田と異なり、傾斜地が多く、一枚の畑でも傾斜角度は均一ではなくうねっており、しかも土の表面は凸凹で、土質軟弱の度合いも異なり、雨が降ると土壌条件は更に変化していく。また、畑と農道に段差が有る場合も多く、出入り口が一箇所しかない場合などもあり、正に圃場の条件は千変万化である。一斉収穫する場合と選抜収穫する場合とでは、本装置の使用条件が異なる。更に、コンベアー本体の作業する人々に対する高さは、個人差はあるが、腰の高さ付近が最適であり、作業者の方に傾くほうが望ましい作業状態である。但し、一直線に連結できない場合は、人力(人力のみにより場合と、ボールコンベアーを併用して搬送方向を変える場合などがある)により次のコンベアーに積み替え作業する事を積極的に取り入れる事とし、また、コンベアーの連結部分が重なって、且つ、高いほうから低い方向に搬送する場合は、重なったまま使用する方法を選択する事も多々発生する。但し、動力駆動コンベアー(ベルトコンベアー等)の長手方向の傾きは、高さ制限以外、余り問題は発生しない。
【0008】
本発明は、このような従来のコンベアーが有する利用上の必要条件を整え、圃場が有する阻害条件を、多数の問題解決手段の結合の効果で克服しようとするものであり、新たに可能と成った機能を積極活用して、圃場内搬送作業を省力かすることを目的とするものである。
【課題を解決するための手段】
【0009】
そして、本発明は上記目的を達成するために,コンベアー本体の長手方向及び短手方向の傾斜角度調整手段を有するコンベアー本体を支持する主支持台を、圃場内に直接設置して前記主支持台を支持する従支持台とを旋回手段を有して連結する構成とした。
【0010】
また、第2の課題解決手段は、従支持台の圃場に接地する脚又はタイヤの水平方向の幅調整手段、垂直方向の支持長さ(高さ)調整手段、及び、タイヤを利用する場合は、タイヤの転動方向を少なくとも180度変更調整可能な手段を有する構成としたものである。
【0011】
また、第3の課題解決手段は、コンベアー本体が、当該本体を支持する主支持台に対し、長手方向にスライドする手段を有する構造とし、主支持台との支持位置を変更できるようにした。
【0012】
また、第4の課題解決手段は、無動力・重力式コンベアーを利用する場合、当該コンベアー本体に、長手方向に平行な両端面の片側又は両側に落下防止ガイドを設け、当該落下防止ガイドと短手方向の傾斜を変える機能を併用して利用する落下防止兼摩擦抵抗ガイドを設けた。
【0013】
また、第5の課題解決手段は、ローラーコンベアーを利用する場合、ローラーに噛み合いながらローラーコンベアー上を長手方向に走行する手段を有する動力式押し台車を配置した。
【0014】
また、第6の課題解決手段は、主支持台と従支持台の間に、主支持台が従支持台に対し、垂直方向に上下移動する上下移動支持台を配設し、当該上下移動支持台と従支持台を旋回手段を有して連結した。
【0015】
また、第7の課題解決手段は、コンベアー本体の片方端又は両端の下面で短手方向の中心を支持する一本足の脚を設け、同脚は長さ(高さ)調節手段を有し、かつ、ユニバーサル機能を有して取り付けた。
【0016】
また、第8の課題解決手段は、ボールコンベアーを主支持台に配設し、主支持台と従支持台を旋回機能を省略して配設し、ボールコンベアー上面に、搬送物の流れの方向を変える方向変換ガイド板を同面上で移設可能にして設けた。
【0017】
第1の課題解決手段による作用は、後述する従支持台で調整した高さ及び同従支持台の水平を元に、移動の度に、生ずる傾きの変化を再調整し、作業の利便性に合わせて積極的に二つの傾斜角度を変更する事を可能にする。旋回機能は、圃場内移動する場合に、搬送方向の角度を任意に選択できる。また、2基3基4基と連結して使用する場合は、畝立てのピッチが問題で、コンベアー本体一基の長さが当該ピッチの整数倍であることはまれで、連結端部に長さの過不足を生じると連結の妨げとなるが、例えば2基を畝と直角方向に、重なる部分を最小にして配置した後、1基を移動させながら2基を旋回させると、重なる部分がゼロとなる畝とコンベアー長手方向の角度が二つあり、一直線に連結する事ができる。
【0018】
また、第2の課題解決手段による作用は、畝幅、畝溝幅、畝の高さ、畝上の作物の有無、及び作業に最適な従支持台、即ち主支持台の高さを調整する効果を発揮し、傾斜畑に有っては、従支持台、即ち主支持台の大まかな水平を調整保持できる。また、異なる畝幅を跨いで利用可能で、タイヤ利用の場合は走行方向を転換できる。
【0019】
また、第3の課題解決手段による作用は、2基3基4基と連結して利用する場合、畝立てのピッチが問題で、一基の長さが当該ピッチの整数倍であることはまれで、連結端部に長さの過不足を生じ連結の妨げとなるが、例えば2基を畝と直角方向に配置し、連結端が重複又は短い場合はスライドさせて簡単に前記課題を解決する効果を発揮する。前述の旋回機能による連結と異なり、畝立て方向に対する搬送方向の角度は任意に選択できる効果も発揮する。
【0020】
また、第4の課題解決手段による作用は、無動力・重力式コンベアーを利用する場合、長手方向に傾斜が残る状態で短手方向は水平の場合は、当該コンベアーに載せた荷物は長手方向の下り方向に動き始めるが、動くと困る場合はストッパーを掛けるか人手で押さえておく必要が有るが、落下防止兼摩擦抵抗ガイドを設けることで、短手方向に若干(経験による)傾斜させ、角度を調節して、当該ガイドと荷物が適度の摩擦抵抗の元に接触しておれば、落下防止、長手方向の移動防止、及び、作業者の方に傾けていると作業がしやすくでき、コンベアーに載せた後水平にすれば、重力で動き出し、無人で搬送できる。
【0021】
また、第5の課題解決手段による作用は、無動力のローラーコンベアーを利用する場合、当該コンベアー上を走行する手段を有する動力式押し台車を利用する事で、コンベアーが長手方向に水平のときは搬送方向に荷物を押し、傾斜のある場合で、搬送方向が上りの場合は押し上げ、下りの場合は押しながら下がり、同台車が停止中は、傾斜方向に重力で移動する事を阻止するストッパー役に利用できる。
【0022】
また、第6の課題解決手段による作用は、無動力・重力式コンベアー利用の場合、同コンベアー本体の高さ調整手段により、作業者に対する最適な高さを、従支持体が有する同機能とは別に提供できる。また、平坦な圃場で利用する場合で、かつ、長手方向に傾斜を付けて2基3基4基と連結利用する場合は、傾斜方向及び平行の切り替えが行える。また傾斜畑では高いほうに配置する基を順次低くして、傾斜を緩くするか水平、又は逆勾配に調整利用できる。但し、動力式コンベアーにあっては、作業者に最適な高さ調整にのみ有用である。
【0023】
また、第7の課題解決手段による作用は、コンベアー本体の片側端又は両端の下面で短手方向の中心に垂直加重を受ける一本足の脚を設け、同脚をユニバーサル機構で連結し、脚の長さを伸縮可能にする事で、当該コンベアー本体の傾きや同端部の高さに対応して垂直加重を受け、当該コンベアーの単位長さ当たりの負荷を大きくする事が出来る。また、ユニバーサル機構は当該脚をコンベアー本体下面に格納するに便利である。更に、長手方向の角度維持機能も発揮する。
【0024】
また、第8の課題解決手段による作用は、コンベアー本体連結部で搬送方向に折れが生ずる場合、人手による積み替え作業が必要と成るが、人手を省略して、任意に搬送方向を変更できる。
【発明の効果】
【0025】
上述したように本発明の圃場内利用コンベアー装置は、コンベアー本体の長手及び短手方向の傾きを、気泡式水平器等を基準に調整可能で、旋回機能で搬送方向も変更容易で、また、旋回機能は2基3基4基と直列に連結容易な圃場内利用コンベアー搬送装置を提供できる。
【0026】
また、従支持台は、同支持台の高さ調整を調整し、傾斜畑にあっては水平に調整し、畝を跨いで設置する脚及びタイヤの水平距離幅を調整し、タイヤの転動方向を変更して、畝を斜め又は直角に移動できる効果を発揮する。
【0027】
また、スライド手段は、畝幅に影響を受けず、かつ、前述の二つの角度しか選べない旋回機能利用による連結の場合と異なり、搬送方向は任意に選択できて、2基3基4基と複数基連結を容易にする効果を発揮する。
【0028】
また、落下防止兼抵抗ガイドは、作業者の利便性を目的にコンベアー本体を短手方向に傾斜をさせ際に、落下防止に寄与し、また、無動力・重力式コンベアーを利用する場合で長手方向に傾斜して短手方向は平行の場合、ストッパーを用いるか人手で押さえないと、荷物が自重で傾斜方向に動くが、短手方向に傾斜をさせ落下防止兼抵抗ガイドと接触させて動きを抑制できる効果を発揮する。
【0029】
また、無動力重力式ローラーコンベアー上を走行する押し台車は、コンベアーを水平に設置した場合はもとより、傾斜している場合でも、搬送方向が上りの場合は押し上げ、下りの場合は押しながら下がり、ストッパーの役目も果たすことができ、作業者の歩行数を低減する効果を発揮する。
【0030】
また、従支持台の高さ調整機能とは別に、コンベアー本体の高さ調整機能を設けると、圃場が平坦な場合、従支持台で調整した高さを基準に、補助的に高さを変更調整し、作業者に最適な高さを提供できる。また無動力・重力式コンベアー利用で、空箱を圃場に搬入し、収穫箱を搬出する場合等に、長手方向の傾斜を切り替えて、自重で搬送させる傾きを変更調整する効果を発揮し、圃場が傾斜畑の場合は傾斜及び高さを調整した従支持台を基準に、補助的に高さを調整し、従支持台で完了できない傾斜の残り角度を穏やかにしたり、平行にしたり、逆勾配にする効果を発揮する。一枚の畑でも、凸凹でうねりのある圃場を移動しながら利用する本装置は、常に調整の必要が有り、従来と異なり、格段と簡単容易に調整が出来る。
【0031】
また、一本足の脚はコンベアー本体の長手方向の傾き、短手方向の傾き及び同端部の高さに順応して垂直加重を受けてコンベアー本体の単位長さ当たりの負荷を大きくし、長手方向の傾斜角度保持機能を有し、当該コンベアー下面に格納を容易にする効果を発揮する。
【0032】
また、ボールコンベアーを搬送方向変更の連結部に配し、同コンベアー上面に搬送方向変更ガイド板を移設可能に設け、搬送方向を選択自由に変更できる効果を発揮する。
【図面の簡単な説明】
【0033】
【図1】本発明の実施形態を示す搬送装置の主支持台の概略配置側面図
【図2】同搬送装置の主支持台の概略配置正面図
【図3】同搬送装置の従支持台の部分断面の概略配置側面図
【図4】同搬送装置の従支持台の概略配置平面図
【図5】同搬送装置で吊り上げ上下動式1例目の概略配置側面図
【図6】同搬送装置で吊り上げ上下動式1例目の概略配置正面図
【図7】同搬送装置で吊り上げ上下動式2例目の概略配置正面図
【図8】同搬送装置で吊り上げ上下動式2例目の概略配置側面図(矢視A−A)
【図9】ローラーコンベアー短手方向を作業者方向に角度α傾け正面図
【図10】1本足の脚の正面図
【図11】1本足の脚の側面図
【図12】押し台車の車輪と噛み合うローラーの部分断面の側面図
【図13】傾斜畑で傾斜の残った連結コンベアー上の箱を押し台車で押す側面図
【図14】ボールコンベアーで搬送方向を転換する平面配置図
【図15】傾斜畑で本発明の搬送装置2基を連結した概略側面図
【図16】従来のローラーコンベアー3基を直列に並べた概観平面図
【図17】従来のローラーコンベアー3基を直列に並べた概観側面図
【発明を実施するための形態】
【0034】
以下、本発明の実施の形態を図1〜図15に基づいて説明する。
【0035】
図においては、1はコンベアー本体、2はコンベアー本体を支持する主支持台で、スライド支持台2−a、長手方向傾斜調整台2−b、短手方向傾斜調整台2−cで構成し、支持ブラケット及び回動支持ピン3で連結しているが、3者の上下の位置関係は入れ替えてもよい。コンベアー本体長手方向の傾きは、回動中心3―aと一対のコンベアー本体長手方向の傾き調整具4−aを伸縮させて、作業の総ての段階で変更調整可能である。また、コンベアー本体短手方向の傾きは、回動中心3―dと一対のコンベアー本体短手方向の傾き調整具4―bを伸縮させて、作業の総ての段階で変更調整可能である。更に主支持台下部に設けた旋回軸5を中心に、コンベアー本体は旋回可能で、搬送方向を作業の総ての段階で変更することが出来る。
【0036】
8は、圃場内に直接接地して主支持台を支持する従支持台で、従支持台中心に軸受け8−kを設け、旋回軸5は旋回軸穴8−mにカン合する。水平方向伸縮フレーム8―bは主フレーム8―aに対して伸縮する事で、脚又はタイヤの水平距離を調整して畝幅に合わせる事が出来る。また、垂直方向伸縮フレーム8―eは垂直方向支持フレーム8―cに対して伸縮する事で、主フレーム8―aの高さ調整を可能とし、また傾斜畑では、垂直方向伸縮フレーム高さを個別に調整して、主フレーム8―aを平行に調整できる。タイヤ利用の場合、通常は畝溝に沿って移動するが、本装置自体を圃場に搬入する際や、畝を斜め又は直角に移動する際に、タイヤの転動方向を変更して移動を可能にした。
【0037】
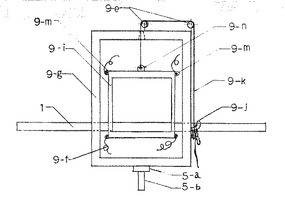
9は主支持台吊り上げ式門型支持台で、回転軸5の上に門型支持台下部横梁9−pを設け、同横梁両端上向きに、主支持台上下動ガイド及びスイングガイド兼用吊り上げ支柱9―aを配設し、当該支柱の上部梁9−g中心より主支持台吊り上げロープ9―kで主支持台の吊り上げブラケット9―cを台付けフック穴9―dを介して吊り上げる事で、主支持台の吊り上げブラケット9―cと連結している主支持台2を吊り上げる。9―bは主支持台の上下動ガイド及びスイングガイド棒で、主支持台上下動ガイド及びスイングガイド兼用吊り上げ支柱9―aと当該ガイド棒9―bにガイドされながら自由に主支持台は上下し、かつ、従支持台8の短手方向の傾きを自重で水平に戻そうと作用し、強制的に傾けた後、例えば支柱9―aとガイド棒9―bを固定すれば、必要に応じ作業に望ましい角度を選択できる。即ち、ロープ吊り上げ方式は、コンベアー本体の高さ調節機能を有し、かつ、短手方向の傾き調整機能を有しているので、短手方向傾斜調整台2−cの機能を果たし、主支持台2から短手方向傾斜調整台2−cを省略できる。
【0038】
また、主支持台吊り上げ具9−iは主支持台2と主支持台の吊り上げブラケット9―cを一体化し、スライド機能のみを残したもので、当該具9−iの六面の角8箇所に主支持台横引きロープ取り付けブラケット9―mを設け、同ブラケット9―mと主支持台吊り上げ式門型支柱の任意の箇所とを主支持台横引きロープ9―fで結び、引っ張る方向と強さを加減して、コンベアー本体の長手及び短手方向の傾斜角度を調整する。即ちこの例の吊り上げ方式は、ロープで吊り上げる事で、長手及び短手方向の傾斜角度調整機能及び、支柱9―gに干渉されない範囲で旋回機能を果たすことが出来き、主支持台2から長手方向傾斜調整台2−b、短手方向傾斜調整台2−c及び旋回機能を省略できる。但し、本例では主支持台吊り上げ式門型支柱9―gの如く、門型で表記したが、コ型でも良く、また、吊り上げ方式ではなく、押し上げ手段で主支持台2を上下させる方法でもよい。
【0039】
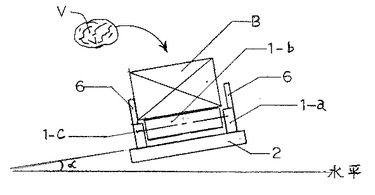
ここで、Vは収穫物を表わし、ローラーコンベアー本体を短手方向、且つ作業者の方向に角度α傾けた状態では、作業者はコンベアー上の箱Bに詰める作業、又は収穫物Vを詰めた箱Bをコンベアー上に載せる作業は、角度αが、ゼロまたはマイナスの場合よりも楽に行える。また、長手方向に傾斜が残り、かつ角度αがゼロの状態で前記作業を行う場合、箱Bは下り勾配に動き出すが、角度αを設けて調整し、箱Bを落下防止兼摩擦抵抗ガイド6に接触させる事で、前記の作業性の向上及び箱Bは下り勾配に動き出すことを防止することを可能にする。
【0040】
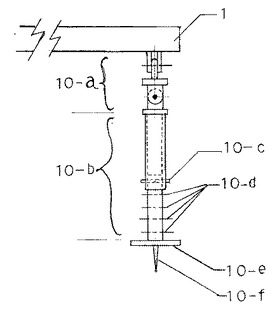
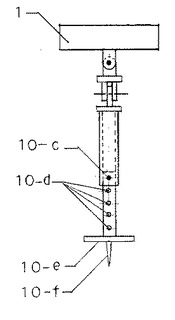
また、10は一本足の脚で、10−aはユニバーサル連結部、10−bは脚の伸縮部で、コンベアー本体1の端部下面の短手方向の中央に設け、10−eは脚先端の接地面積を大きくするフランジ、10−fは脚接地位置のズレを止めるスパイクである。当該脚10は、無負荷状態でコンベアー本体1の姿勢を決めた後、当該コンベアー本体の二つの傾斜角度及び高さに順応して垂直に設置し、垂直加重を受けることでコンベアー本体の単位長さの負荷を大きくすると同時に、長手方向の傾斜角保持の役割も果たすことが出来る。
【0041】
また、11は動力式押し台車で、1―bはローラーコンベアーのローラー、動力式押し台車の駆動輪11−bは、前述のローラー1−bに噛み合いながら進む駆動輪で、同ローラー上を走行し、搬送方向が水への場合は押し、上り勾配の場合は押し上げ、下り勾配の場合は押しながら下がり、停止中はストッパー役を果たすことが出来る。
【0042】
また、12はボールコンベアー本体で、12−bは搬送方向転換ガイド板、12−cは同板12−bに取り付けた支持支柱で、ボールコンベアー本体12の上面に設けた差込穴12−dに差込、同板12−bの角度決めと固定を行う。これなの機能は極めて簡単に搬送方向を変換できる。
【0043】
以下、上記構成の動作を図15で説明する。傾斜畑に本発明の圃場内利用コンベアー装置(無動力・重力式)を二基連結使用する場合で、一号基二号基の従支持台8は傾斜に合わせ、脚部を段違いに調整し、両基の高さは可能な限り同じとする。次に両基を連結し、高さ調整手段吊り上げロープ9−kで作業者に最適の高さと水平を調整する。重力を利用して傾斜方向に搬送する場合は片方又は両基の高さ調整機能で傾斜を付ける。作業が進むと順次移動するが、圃場の条件変化に対応して傾きや高さを調整し、搬送方向が折れる場合は、人力により積み替えるかボールコンベアー12を利用し、搬送距離に応じて複数基導入する。但し、以上例示してきたコンベアーの支持点はコンベアー本体1の中心を基準に記載したが、片方の端部を支持する片持ち支持を排除するものではない。
【符号の説明】
【0044】
1 コンベアー本体
1―a ローラーコンベアー本体フレーム
1―b ローラー
1―c ローラー支持軸
2 主支持台
2―a スライド支持台
2―b 長手方向傾斜調整支持台
2―c 短手方向傾斜調整支持台
2―d 主支持台吊り下げ式門型支持台
3 支持ブラケット及び回動支持ピン
3―a コンベアー本体長手方向の傾き回動中心
3―b コンベアー本体長手方向の傾き調整具の上部連結
3―c コンベアー本体長手方向の傾き調整具の下部連結
3―d コンベアー本体短手方向の傾き回動中心
3―e コンベアー本体短手方向の傾き調整具の上部連結
3―f コンベアー本体短手方向の傾き調整具の下部連結
4―a コンベアー本体長手方向の傾き調整具
4―b コンベアー本体短手方向の傾き調整具
5 旋回軸
5―a 垂直加重受けスラスト軸
5―b 旋回軸中心を保持する回転軸
6 落下防止兼摩擦抵抗ガイド
7 コンベアー本体脱落防止ガイド
8 従支持台
8―a 主フレーム
8―b 水平方向伸縮フレーム
8―c 垂直方向支持フレーム
8―d 垂直方向支持フレーム下部、高さ調整リング受けフランジ
8―e 垂直方向伸縮フレーム
8―f 高さ調整リング
8―g 高さ調整リング位置決めピン穴及びピン
8―h 垂直方向伸縮フレーム高さ調整ピン穴
8―i タイヤ(脚の図は省略した)
8―j 軸受箱
8―k 軸受
8―m 旋回軸ピン穴
9 主支持台吊り上げ式門型支持台
9―a 主支持台上下動ガイド及びスイングガイド兼用吊り上げ支柱
9―b 主支持台の上下動ガイド及びスイングガイド棒
9―c 主支持台の吊り上げブラケット
9―d 台付ロープ取り付け穴
9―e 滑車
9―f 主支持横引きロープ
9―g 主支持台吊り上げ式門型支柱上部横梁
9―h 主支持台吊り上げロープ貫通穴
9―i 主支持台吊り上げ具
9―j ロープ固縛角型具
9―k 主支持台吊り上げ高さ調整ロープ
9―m 主支持台横引きロープ取り付けブラケット(8箇所)
9―n 主支持台吊り上げロープ取り付けブラケット
9−p 主支持台吊り上げ式門型支柱下部横梁
10 一本足の脚
10−a ユニバーサル連結部
10−b 脚伸縮部
10−c 脚長位置決めピン
10−d 脚長位置決めピン穴
10−e 接地面積増大フランジ
10−f スパイク
11 押し台車
11−a 押し台車の押し面
11−b 押し台車の駆動輪
11−c ローラーコンベアーのローラー
11−d 押し台車の底面
12 ボールコンベアー本体
12−a ボール
12−b 搬送方向転換ガイド板
12−c 搬送方向転換ガイド板支持支柱
12−d 搬送方向転換ガイド板支持支柱差込穴
V 収穫した野菜
NV 未収穫野菜(畝上に残っている)
B 収穫した野菜を入れる箱
α ローラーコンベアー本体が水平に対する短手方向の傾斜角度
N 農道
S 作業道
T トラック
UN 畝
UNB 畝溝底
P プラスチックの空箱
RC 従来のローラーコンベアー
【特許請求の範囲】
【請求項1】
1基のコンベアーにあって、当該コンベアー本体は長手方向及び短手方向に傾斜角度調整手段を有してコンベアー本体を支持する主支持台上に配設し、かつ、当該主支持台は、少なくとも3本の脚又は3本のタイヤを有して圃場内に設置又は移動する従支持台上に配設し、当該主支持台と従支持台とは旋回手段を有して連結される事を特徴とする圃場内利用コンベアー搬送装置。
【請求項2】
請求項1に記載の圃場内利用コンベアー搬送装置の従支持台にあって、当該支持台の脚及びタイヤを支持するフレームが水平方向に伸縮手段を有し、また、脚又はタイヤを支持する垂直フレームは垂直方向に伸縮手段を有し、かつ、タイヤを利用する場合は当該タイヤの転動方向が少なくとも180度変更可能な手段を有する主支持台で構成する事を特徴とする圃場内利用コンベアー搬送装置。
【請求項3】
請求項1又は2に記載の圃場内利用コンベアー搬送装置にあって、コンベアー本体が、当該主支持台に対し、長手方向にスライドする手段を有する事を特徴とする圃場内利用コンベアー搬送装置。
【請求項4】
請求項1、2又は3に記載の圃場内利用コンベアー搬送装置にあって、前記コンベアーを無動力・重力式コンベアーに限定利用する場合、コンベアー本体の長手方向に平行な両端面の片側又は両側に落下防止ガイドを設け、当該落下防止ガイドは落下防止兼摩擦抵抗ガイドとして利用する事を特徴とする圃場内利用コンベアー搬送装置。
【請求項5】
請求項1、2、3又は4に記載の圃場内利用コンベアー搬送装置にあって、前記コンベアーをローラーコンベアーに限定利用する場合、ローラーに噛み合いながらローラーコンベアー上を走行する手段を有する動力式押し台車を配設する事を特徴とする圃場内利用コンベアー搬送装置。
【請求項6】
請求項1、2、3、4又は5に記載の圃場内利用コンベアー搬送装置にあって、当該装置のコンベアー本体が当該従支持台に対し上下して、高さ調整手段を有することを特徴とする圃場内利用コンベアー搬送装置。
【請求項7】
請求項1、2、3、4、5又は6に記載の圃場内利用コンベアー搬送装置にあって、コンベアー本体両端又は片端の短手方向中央下面に、伸縮手段を有し、かつ、ユニバーサル機構を介して取り付ける一本足の脚を配設することを特徴とする圃場内利用コンベアー搬送装置。
【請求項8】
請求項1、2又は6に記載の圃場内利用コンベアー搬送装置にあって、当該装置にボールコンベアーを利用する場合に、各ボールは少なくとも4角の多角形(円形を含む)のコンベアー本体上面に配設し、主支持台と従支持台との連結は、旋回手段を省略して、直接連結し、ローラーコンベアー上面に方向変更ガイドを移設可能に設けることを特徴とする圃場内利用コンベアー搬送装置。
【請求項1】
1基のコンベアーにあって、当該コンベアー本体は長手方向及び短手方向に傾斜角度調整手段を有してコンベアー本体を支持する主支持台上に配設し、かつ、当該主支持台は、少なくとも3本の脚又は3本のタイヤを有して圃場内に設置又は移動する従支持台上に配設し、当該主支持台と従支持台とは旋回手段を有して連結される事を特徴とする圃場内利用コンベアー搬送装置。
【請求項2】
請求項1に記載の圃場内利用コンベアー搬送装置の従支持台にあって、当該支持台の脚及びタイヤを支持するフレームが水平方向に伸縮手段を有し、また、脚又はタイヤを支持する垂直フレームは垂直方向に伸縮手段を有し、かつ、タイヤを利用する場合は当該タイヤの転動方向が少なくとも180度変更可能な手段を有する主支持台で構成する事を特徴とする圃場内利用コンベアー搬送装置。
【請求項3】
請求項1又は2に記載の圃場内利用コンベアー搬送装置にあって、コンベアー本体が、当該主支持台に対し、長手方向にスライドする手段を有する事を特徴とする圃場内利用コンベアー搬送装置。
【請求項4】
請求項1、2又は3に記載の圃場内利用コンベアー搬送装置にあって、前記コンベアーを無動力・重力式コンベアーに限定利用する場合、コンベアー本体の長手方向に平行な両端面の片側又は両側に落下防止ガイドを設け、当該落下防止ガイドは落下防止兼摩擦抵抗ガイドとして利用する事を特徴とする圃場内利用コンベアー搬送装置。
【請求項5】
請求項1、2、3又は4に記載の圃場内利用コンベアー搬送装置にあって、前記コンベアーをローラーコンベアーに限定利用する場合、ローラーに噛み合いながらローラーコンベアー上を走行する手段を有する動力式押し台車を配設する事を特徴とする圃場内利用コンベアー搬送装置。
【請求項6】
請求項1、2、3、4又は5に記載の圃場内利用コンベアー搬送装置にあって、当該装置のコンベアー本体が当該従支持台に対し上下して、高さ調整手段を有することを特徴とする圃場内利用コンベアー搬送装置。
【請求項7】
請求項1、2、3、4、5又は6に記載の圃場内利用コンベアー搬送装置にあって、コンベアー本体両端又は片端の短手方向中央下面に、伸縮手段を有し、かつ、ユニバーサル機構を介して取り付ける一本足の脚を配設することを特徴とする圃場内利用コンベアー搬送装置。
【請求項8】
請求項1、2又は6に記載の圃場内利用コンベアー搬送装置にあって、当該装置にボールコンベアーを利用する場合に、各ボールは少なくとも4角の多角形(円形を含む)のコンベアー本体上面に配設し、主支持台と従支持台との連結は、旋回手段を省略して、直接連結し、ローラーコンベアー上面に方向変更ガイドを移設可能に設けることを特徴とする圃場内利用コンベアー搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−158439(P2012−158439A)
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願番号】特願2011−19789(P2011−19789)
【出願日】平成23年2月1日(2011.2.1)
【出願人】(711001147)
【Fターム(参考)】
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願日】平成23年2月1日(2011.2.1)
【出願人】(711001147)
【Fターム(参考)】
[ Back to top ]