
圧縮機の車載構造
【課題】車両の上下振動に対する車載リニアモータの信頼性を向上させる。
【解決手段】リニアモータ固定子80、および、リニアモータ固定子80により発生する磁界によって直線状に往復移動するリニアモータ可動子82を含むリニアモータ70と、リニアモータ可動子82に固定されるピストン軸55と、ピストン軸55の端部に設けられ、シリンダ52内で往復移動して冷媒ガスの圧縮および膨張を行うピストン54とを備える圧縮機56の車載構造であって、リニアモータ可動子82の移動方向が水平方向に沿うように圧縮機56を車両に搭載することを特徴とする。
【解決手段】リニアモータ固定子80、および、リニアモータ固定子80により発生する磁界によって直線状に往復移動するリニアモータ可動子82を含むリニアモータ70と、リニアモータ可動子82に固定されるピストン軸55と、ピストン軸55の端部に設けられ、シリンダ52内で往復移動して冷媒ガスの圧縮および膨張を行うピストン54とを備える圧縮機56の車載構造であって、リニアモータ可動子82の移動方向が水平方向に沿うように圧縮機56を車両に搭載することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、圧縮機の車載構造に関し、特に、リニアモータを駆動源として備える圧縮機の車載構造に関する。
【背景技術】
【0002】
昨今、車載の二次電池から電力を供給し、その電力により車載のモータを駆動して走行用動力を得る電気自動車(以下、EVということがある)がCO2を排出しないゼロエミッションの観点から注目されている。走行用動力源としてエンジンとモータとを併用するハイブリッド電気自動車(以下、HEVということがある)も普及が急拡大しつつある。
【0003】
上記のような電気自動車やハイブリッド車に搭載されるモータは、限られた狭いスペースに搭載されるために小型で且つ高出力であることが求められ、その出力性能を維持するにはモータの温度上昇を抑制すること、より具体的にはステータコイルの冷却が不可欠である。
【0004】
これに関連する先行技術文献として、特開2000−125512号公報(特許文献1)には、コイルエンド接触冷却型回転電機が開示されている。この回転電機では、ステータコイルの少なくともコイルエンドを、厚さ方向がステータコアの径方向に一致する姿勢でステータコアの端面から突出する細板状導体からなる各軸方向突出部を互いに径方向に重ねて構成している。そして、このコイルエンドの径方向最外側または径方向最内側の細板状導体の平坦な主面に電気絶縁されつつ直接に密着する平坦な冷却面を有する良熱伝導性の冷却部材を設けることによりコイルエンド部2dの冷却性を向上することが記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2000−125512号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、上記EVやHEVに搭載されるモータとして、超電導モータを用いることが考えられる。超電導モータは、超電導線材からなる複数のコイルを有しており、このコイルを所定の極低温(例えば70K)に冷却して電流、厳密には直流電流を流すと電気抵抗が実質的にゼロになることから、モータひいてはEV等の低電費化を図るうえで有望である。
【0007】
超電導モータを動力源として搭載するには、超電導線材からなるコイルを極低温にまで冷却可能な冷凍機を車載する必要がある。しかし、この冷凍機についても搭載スペースの制限等の理由から、小型で高い冷凍性能であることが求められる。
【0008】
上記のような冷凍機として、例えば蓄冷型冷凍機、スターリング冷凍機などが用いられる。このスターリング冷凍機は、リニアモータよりシリンダ内で往復駆動されるピストンを含む圧縮機と、圧縮機内において圧縮および膨張が繰り返される圧縮ガスである例えばヘリウムガスが内部に流出入する蓄冷部とを備える。
【0009】
上記のようなスターリング冷凍機が車載された場合、例えば、車両が悪路を比較的高速で走行したとき車体には上下方向の周期的な振動が生じることがある。このときの振動周波数が上記スターリング冷凍機の圧縮機内におけるリニアモータのリニアモータ可動子およびピストン等からなる振動系の往復振動周波数に相当した場合には、共振により振幅が著しく大きくなって破損につながるおそれがある。
【0010】
本発明の目的は、車体の上下振動によって圧縮機を構成するリニアモータが破損しないように圧縮機を車両に搭載する車載構造を提供することにある。
【課題を解決するための手段】
【0011】
本発明に係る圧縮機の車載構造は、リニアモータ固定子、および、前記リニアモータ固定子により発生する磁界によって直線状に往復移動するリニアモータ可動子を含むリニアモータと、前記リニアモータ可動子に固定されるピストン軸と、前記ピストン軸の端部に設けられ、シリンダ内で往復移動して冷媒ガスの圧縮および膨張を行うピストンとを備える圧縮機の車載構造であって、車両が水平面上に置かれたときに前記リニアモータ可動子の移動方向が水平方向に沿うように前記圧縮機を前記車両に搭載することを特徴とするものである。
【0012】
ここで水平方向とは、完全なる水平方向である場合に限らず、水平方向に対して所定角度傾斜している場合も含むものとし、上記所定角度は±30度であることが好ましく、±10度であることがより好ましい。
【0013】
本発明に係る圧縮機の車載構造において、前記リニアモータ可動子の移動方向が前記車両の進行方向と直交する方向に沿うように前記圧縮機が前記車両に搭載されていてもよい。ここで直交方向とは、車両の進行方向に対して完全に90度をなして交差する方向に限らず、90度を含む所定角度範囲で前記車両進行方向と交差する方向も含むものとし、上記所定角度範囲は60〜120度であることが好ましい。
【0014】
また、本発明に係る圧縮機の車載構造では、前記リニアモータ可動子を貫通して固定される前記ピストン軸は前記リニアモータ可動子の軸方向両側において、前記リニアモータを収容するモータハウジング内壁に固定されたフレクシャベアリングによってそれぞれ支持されていてもよい。
【0015】
さらに、本発明に係る圧縮機の車載構造において、前記圧縮機は、前記車両の動力源である超電導モータの超電導線材からなるコイルを冷却するための蓄冷型冷凍機の一部を構成してもよい。この場合、前記冷凍機の圧縮機が前記超電導モータのモータケースの外周側壁上に一体に取り付けられていてもよい。
【発明の効果】
【0016】
本発明に係る圧縮機の車載構造によれば、例えば車両が悪路を比較的高速で走行したとき等に上下方向の振動が車体に継続して加わっても、リニアモータ可動子、ピストン軸およびピストンを含む振動系の往復移動方向が水平方向であるため、上記車体の上下方向振動が上記振動系を共振させることがなく、そのためリニアモータが破損するのを抑制でき、リニアモータを駆動源とする圧縮機、この圧縮機により冷却される超電導モータ、および、超電導モータを動力源とする電動車両の車体振動に対する信頼性が向上する。
【図面の簡単な説明】
【0017】
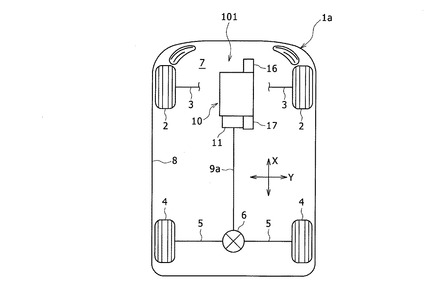
【図1】本発明の一実施形態である圧縮機の車載構造を適用した電気自動車の概略構成図である。
【図2】図1に示す超電導モータの軸方向に沿った断面図(一部側面を含む)である。
【図3】図2におけるA−A線断面図である。
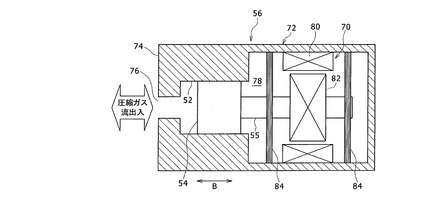
【図4】冷凍機の圧縮部の縦断面図(一部側面を含む)である。
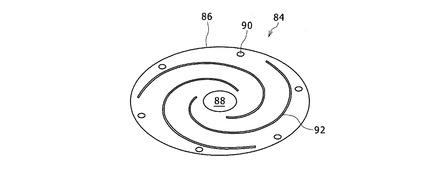
【図5】図4に示す圧縮部に含まれるフレクシャベアリングを示す斜視図である。
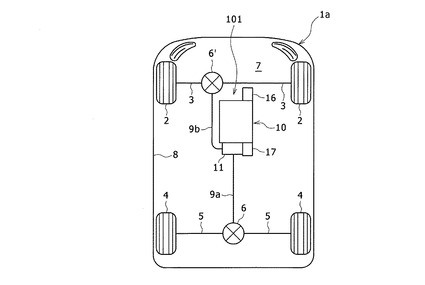
【図6】本発明の別実施形態である圧縮機の車載構造を適用した電気自動車の概略構成図である。
【図7】図6に示す電気自動車の変形例を示す概略構成図である。
【発明を実施するための形態】
【0018】
以下に、本発明に係る実施の形態について添付図面を参照しながら詳細に説明する。この説明において、具体的な形状、材料、数値、方向等は、本発明の理解を容易にするための例示であって、用途、目的、仕様等にあわせて適宜変更することができる。
【0019】
以下の説明では、電動車両として電気自動車を例に説明するが、本発明はハイブリッド車両等の他の電動車両に適用されてもよい。
【0020】
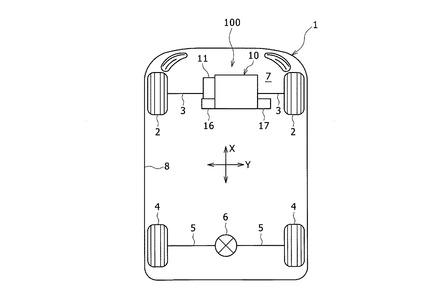
図1は本発明の一実施形態である圧縮機の車載構造100を採用した電気自動車1の概略構成を示す。図1において、矢印X方向が車両進行方向すなわち車両前後方向を示し、車両進行方向と直交する矢印Y方向が車両左右方向すなわち車幅方向を示す。また、図1において、紙面に沿う方向が車両が水平面上の置かれたときの水平方向であり、紙面に垂直な方向が鉛直方向である。
【0021】
電気自動車1は、走行用動力源として超電導モータ12を搭載している。超電導モータ10のロータシャフト18(図2参照)は、超電導モータ10と一体に設けられたトランスミッション11を介して、2つの前輪2にそれぞれ連結されるフロント車軸3に接続されている。これにより、超電導モータ10のロータシャフト18から出力される回転動力がトランスミッション11およびフロント車軸3を介して前輪2に伝達されるようになっている。
【0022】
また、電気自動車1は、2つの後輪4と、各後輪4にそれぞれ接続されるリア車軸5と、リア車軸5が連結されるリアディファレンシャルギヤ6とを備える。2つの後輪4は、電気自動車1の走行時に従動回転することになる。
【0023】
超電導モータ10は、電気自動車1の前部に位置するエンジンコンパートメント7内に搭載されている。超電導モータ10は、図示しないブラケットやマウント等の取付部材を介して車体8に対して固定されている。すなわち電気自動車10は、FF(フロントエンジン・フロントドライブ)車である。
【0024】
超電導モータ10は、第1および第2の冷凍機16,17を一体に備えている。各冷凍機16,17は、リニアモータを内蔵した圧縮部をそれぞれ有しており、電動車両1が水平面上に置かれたときに各圧縮部のリニアモータ可動子の移動方向が水平方向に沿うよう上記圧縮機を電気自動車に搭載した車載構造100を採用している。次に、図2,3を参照して超電導モータ10について詳細に説明する。
【0025】
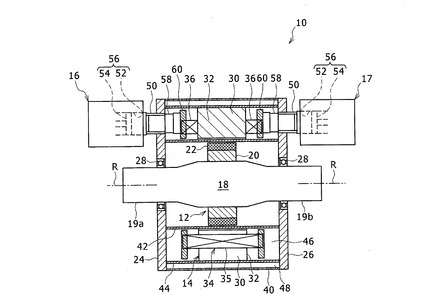
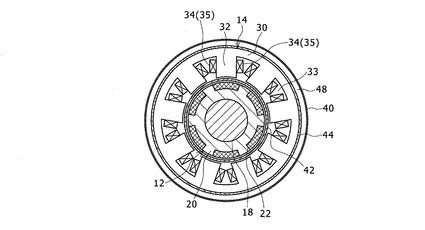
図2,3に示すように、超電導モータ10は、回転可能に支持されたロータ12と、ロータ12の外周を覆って設けられる略円筒状のステータ14と、超電導モータ10の軸方向両端面に固定された2つの冷凍機16,17とを備える。ここでの説明において、ロータ12の中心を貫通するロータシャフト18の回転中心軸Rに関し、これに沿う方向を軸方向といい、回転中心軸Rと直交する放射方向を径方向といい、回転中心軸Rを中心点として前記放射方向を含む平面上に描かれる円形に沿う方向を周方向という。
【0026】
ロータ12は、例えば電磁鋼板を積層してカシメや溶接等により一体に構成される円筒状のロータコア20と、ロータコア20の中心穴を貫通して固定された丸棒鋼材等からなるロータシャフト18とを含む。ロータコア20の外周面には、複数(本実施形態では6つ又は6箇所)の永久磁石22が露出した状態で周方向に等間隔に固定されている。ただし、ロータコア20に設けられる永久磁石は、外周面に露出していなくてもよく、外周面近傍の内部に埋設されてもよい。
【0027】
ロータ12のロータシャフト18は、その両端部19a,19bにおいて、超電導モータ10の軸方向両端面を形成する円盤状のエンドプレート24,26に固定された軸受部材28によって回転可能に支持されている。これにより、ステータ14の内部に回転磁界が形成されると、これに伴ってロータコア20の永久磁石22がひきつけられて、ロータ12が回転駆動されるようになっている。
【0028】
ステータ14は、略円筒状をなす固定子鉄心であるステータコア30を含む。ステータコア30の内周部には、径方向内側へ突出する複数(本実施形態では9つ)のティース部32が周方向に等間隔に形成されている。ステータコア30は、例えば複数の略円環状の電磁鋼板を軸方向に積層してカシメ、接着、溶接等によって一体に組み付けて構成されることができる。ただし、ステータコア30は、各々1つのティース部を有する9つの分割ステータコアを円環状に連ねて配置してその外側から筒状の締結部材により締め付けることによって構成されてもよい。この場合、分割ステータコアは、圧粉磁心により形成されることができる。
【0029】
ステータコア30のティース部32には、超電導線材からなるコイル34が巻装されている。超電導線材は、断面形状が円形状でもよいし、あるいは、矩形状であってもよい。また、超電導線材には、例えば、イットリウム系超電導材料やビスマス系超電導材料が好適に用いられる。ただし、超電導線材を構成する超電導材料は、これらに限定されるものではなく、他の公知の超電導材料、あるいは、将来開発される、より高温で超電導特性を発現する超電導材料であってもよい。
【0030】
コイル34を構成する超電導線材は、絶縁被覆されていてもよい。これにより、コイル34として密着して巻回されたときに各ターン間での電気絶縁が確保される。ただし、超電導線材が絶縁被覆されていない場合、コイル34に形成するときに絶縁紙や絶縁フィルム等を挟みながらコイル状に巻くことで各ターン間の電気絶縁が確保されてもよい。
【0031】
コイル34は、隣接するティース部32間に形成されるスロット内に位置する部分35と、ステータコア30の軸方向両端面から外側へそれぞれ突出するコイルエンド部36とを含む。各コイル34は、2つ置きごとのコイル34と直列接続されてU,V,Wの各相コイルを構成する。各相コイルの一方端は、図示しない中性点において互いに接続され、各相コイルの他方端は図示しない各相電流導入端子にそれぞれ接続されている。
【0032】
超電導モータ10は、円筒状のモータケース40を有している。モータケース40内に、ロータ12およびステータ14が収容されている。モータケース40の軸方向の両端部は、エンドプレート24,26の外周縁部に気密状態で連結されている。モータケース40およびエンドプレート24,26は、例えばステンレス等の非磁性材料から形成される。なお、モータケース40は、エンドプレート24または26と一体のものとして形成されてもよい。
【0033】
モータケース40内には、各々円筒状をなす内筒部材42および外筒部材44がロータ12と同心上に配置されている。内筒部材42および外筒部材44の軸方向両端部は、エンドプレート24,26の内面に気密状態を保持可能に連結されている。内筒部材42は、磁界の通過を妨げず且つ非導電性である非金属材料により形成されるのが好ましい。一方、外筒部材44は、低熱伝導率材料(例えばFRP等)で形成されるのが好ましく、低熱伝導率の非磁性材料で形成されるのがより好ましい。
【0034】
内筒部材42は、ロータ12のロータコア20よりも若干大きい内径を有し、ロータコア20の外周面との間に周方向に一様な隙間が形成されている。また、内筒部材42と外筒部材44との間には、筒状空間からなる第1真空室46が形成されている。第1真空室46内には、コイル34を含むステータ14が収容されている。ステータ14のステータコア30の外周面が、外筒部材44の内周面上に密着して固定されている。
【0035】
第1真空室46は、冷凍機16,17を含めて超電導モータ10が組み立てられた後に、エンドプレート24,26の少なくとも何れかに形成された図示しない空気抜き穴から真空引きされて、真空状態に維持される。このように、熱伝導率が低い内筒部材42および外筒部材44で区画形成し、かつ、内部を真空とすることで、第1真空室46内に収容されたコイル34を含むステータ14への断熱性を高めることができる。
【0036】
さらに、外筒部材44とモータケース40との間には、筒状空間からなる第2真空室48が形成されている。第2真空室48もまた、第1真空室46と同様に真空状態になっている。これにより、第1真空室46内に収容されたコイル34を含むステータ14が第2真空室48によってモータ外部と隔てられることで、コイル34を含むステータ14に対する断熱効果をより一層高めることができる。
【0037】
超電導モータ10において、軸方向の一端側に位置するエンドプレート24には第1の冷凍機16が設けられ、軸方向の他端側に位置するエンドプレート26には第2の冷凍機17が設けられている。第1および第2の冷凍機16,17は、気密状態を確保しつつエンドプレート24,26の貫通穴の周囲に固定された筒状のブラケット50を介してそれぞれ取り付けられている。このように2つの冷凍機16,17を超電導モータの一部として一体に設けることで、車載する際に必要となるスペースをできるだけ小さくすることができる。
【0038】
なお、ここでは2つの冷凍機16,17を超電導モータ10の各エンドプレート24,26にそれぞれ設けるものとして説明するが、1つの冷凍機のみを含むように超電導モータが構成されてもよい。
【0039】
第1および第2の冷凍機16,17は、シリンダ52内でピストン54が直線的に往復移動して冷媒ガス(例えば、Heガス)の圧縮および膨張を繰り返し行うガス圧縮機(以下、単に圧縮機という)56をそれぞれ有する。また、第1および第2の冷凍機16,17は、筒状のブラケット50内からエンドプレート24,26の貫通穴を介して第1真空室46まで延伸した段付き柱状外形状を有する冷却部58をそれぞれ備える。冷却部58の平坦な先端面は、伝熱部材60を介してコイルエンド部36にそれぞれ接触している。ここで、コイルエンド部36と伝熱部材60との間、および、伝熱部材60と冷却部58との間の少なくともいずれか一方に絶縁紙等の絶縁部材を介在させて、コイル34と冷凍機16,17間の電気絶縁が確保されてもよい。
【0040】
第1および第2の冷凍機16,17は、超電導線材からなるコイル34が超電導特性を発現する所望の極低温(例えば、約70K)まで冷却可能な冷却性能を有し、ピストン54のストロークを制御することによって冷却温度を調節することができる。電気自動車1の走行用動力源として搭載される超電導モータ10は、設置スペースの制約や車両重量の軽量化のため冷凍機16,17は小型で軽量のものであることが好ましい。例えば、第1および第2の冷凍機16,17には、蓄冷型スターリング冷凍機が好適に用いられる。ただし、設置スペースおよび重量の制約が緩い場合、例えば、超電導モータ10が電車や船舶等の大型の移動体の動力源として、あるいは、設置位置が固定された機械の動力源として用いられる場合には、上記のような冷却性能を有する冷凍機であれば、体格が大きくて重い冷凍機であっても構わない。
【0041】
第1および第2の冷凍機16,17は、各ピストン54の移動方向が同一直線上となるように対向配置されている。すなわち、第1および第2の冷凍機16,17は、軸方向に対向して設けられている。そして、第1および第2の冷凍機16,17では、各ピストン54が互いに反対方向に移動するように圧縮機56を駆動する。換言すれば、第1および第2の冷凍機16,17において、ピストン54による圧縮ストロークと膨張ストロークとが互いに同期するように駆動される。このような配置および駆動にすることで、ピストン54の移動によって第1および第2の冷凍機16,17が超電導モータ10に及ぼす回転モーメントが相殺されて、振動や騒音を抑制できる。
【0042】
なお、上記では第1および第2の冷凍機16,17を各エンドプレート24,26上に固定するものとして説明したが、これに限定されず、各冷凍機16,17の圧縮機56をモータケース40の外周側壁上に固定し、各圧縮機56からそれぞれ延伸する圧縮ガス流路管を各冷凍機16,17の冷却部58にそれぞれ接続する構成としてもよい。このようにすれば、超電導モータ10の軸方向の幅を小さくすることができ、車両搭載性が向上する。
【0043】
第1の冷凍機16の冷却部58の軸方向先端面が接触する伝熱部材60は、例えば熱伝導性が良好な金属板で形成され、周方向に連なった円環状をなして軸方向一方側に位置する全てのコイルエンド部36に接触している。一方、第2の冷凍機17の冷却部58の軸方向先端面が接触する伝熱部材60は、例えば熱伝導性が良好な金属板で形成され、周方向に連なった円環状をなして、軸方向他方側に位置する全てのコイルエンド部36に接触している。これにより、各冷凍機16,17の冷却部58が伝熱部材60を介してコイルエンド部36から吸熱してコイル34を冷却することができる。
【0044】
伝熱部材60のコイル対向面には、コイルエンド部36が嵌合する凹部または溝が形成されている。このようにすることで、コイルエンド部36と伝熱部材60との接触面積が増加し、コイル34の冷却効率を上げることができる。
【0045】
また、伝熱部材60は、絶縁性樹脂材料を成型することによってコイルエンド部36に一体に形成されてもよい。これにより、コイル34と冷凍機16,17の冷却部58間の電気絶縁性がより向上する。この場合、伝熱部材60の熱伝導性を良好にするために、金属製の粒子または粉末を上記絶縁性樹脂材料に分散させるのが好ましい。
【0046】
このように本実施形態の超電導モータ10では、2つの冷凍機16,17によって、熱容量が大きいステータコア30を介在させることなく、コイル34を軸方向両側から効率よく迅速に所望の極低温まで冷却することができる。そのため、超電導モータ10の始動時間の短時間化、および、冷凍機の消費電力の低減を図れる。
【0047】
また、本実施形態の超電導モータ10では、第1および第2の冷凍機16,17は、各ピストン54の移動方向が同一直線上となるように配置され、かつ、各ピストン54が互いに反対方向に移動するように圧縮機56が駆動されることで、ピストン54の移動によって第1および第2の冷凍機16,17が超電導モータ10に及ぼす回転モーメントが相殺されて振動や騒音を抑制できる。
【0048】
続いて、図4,5を参照して第1および第2の冷凍機16,17の圧縮機56について詳細に説明する。ここでは第2の冷凍機17の圧縮機56を例に説明するが、第1の冷凍機56の圧縮機56も同一構成を有している。
【0049】
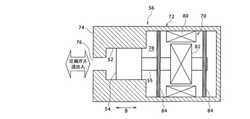
上述したように圧縮機56は、円筒状空間を内包するシリンダ52と、シリンダ52内で矢印B方向に沿って直線状に往復移動する円柱状のピストン54とを備える。ピストン54は、シリンダ52の内径よりも若干小径に形成されており、後述するようにシリンダ内面との間に若干の隙間を形成しつつ非接触状態でシリンダ52内を往復移動可能なように設計されている。
【0050】
シリンダ52は、ピストン54を駆動するためのリニアモータ70を収容するモータハウジング72内に形成されている。モータハウジング72の矢印B方向の一方側端面74には、圧縮される冷媒ガスが流出入する開口部76がシリンダ52と連通して形成されている。
【0051】
上記リニアモータ70は、モータハウジング72内において上記シリンダ52に対して上記開口部76とは反対側に形成されたモータ収容室78内に配置されている。リニアモータ70は、リニアモータ固定子82と、リニアモータ可動子82とを含んで構成されている。リニアモータ固定子80は、モータ収容室78内の内壁に対してねじ止め等の手段によって固定されている。リニアモータ固定子80の内周部には、複数のコイルが巻装されている。これらのコイルに通電することによって、リニアモータ固定子80の内側には、矢印B方向に移動する磁界が形成されるようになっている。
【0052】
一方、リニアモータ固定子80の内側には、リニアモータ可動子82が非接触状態に配置されている。リニアモータ可動子82は、永久磁石を含んで構成される永久磁石型可動子であってもよいし、あるいは、コイル通電によって励磁される電磁気型可動子であってもよい。このようなリニアモータ可動子82は、リニアモータ固定子80により形成される移動磁界に対する反発力および引付力によって、直線状に往復駆動されるようになっている。
【0053】
リニアモータ可動子82の中心部分には、ピストン軸55が貫通して固定されている。リニアモータ可動子82とピストン軸55との固定方法は、溶接、カシメ、ねじ止め等の種々の手段が採用可能である。ピストン軸55の一端部(図4中の左側端部)には、ピストン54が連結されている。ピストン軸55は、リニアモータ可動子82を間にしてその両側において、板ばね84によってそれぞれ支持されている。ピスト軸55は、板ばね84に対して固定されている。具体的には、ピストン軸55に対して外装された板ばね84は、溶接、カシメ、ねじ止め等の種々の手段によってピストン軸55の外周面上に固定されることができる。
【0054】
板ばね84は、図5に示すような例えば薄鋼板からなる円板状の板ばねであるフレクシャベアリング86を複数枚重ね合わせて構成されている。フレクシャベアリング86は、中心部にピストン軸取付穴88が形成されるとともに、外周縁部に複数の固定穴90が周方向に均等配置で形成されている。これらの固定穴90に挿通されるボルトと必要に応じて前記ボルトに螺合するナットとによって、複数枚のフレクシャベアリング86からなる板ばね84はモータ収容室78の内壁に対して固定されている。
【0055】
また、フレクシャベアリング86には、ピストン軸取付穴88を取り囲んで3本の渦巻状のスリット92が周方向に均等配置で形成されている。これらのスリット92の数、幅、長さ、形状等は、板ばね84について所望の面内ばね定数および面直交ばね定数が得られるように適宜に設計される。ここで、面内ばね定数は、中心取付穴88に固定された、ピストン54、ピストン軸55およびリニアモータ可動子82を含む振動系を板ばね86の中心位置にシリンダ52に対して同軸状に保持するための弾性定数であり、他方、面直交ばね定数は、リニアモータ70による駆動によって往復移動するピストン54等からなる振動系の共振状態が確保されるように設定される弾性定数である。
【0056】
上記板ばね84の面内ばね定数は、圧縮機56内のリニアモータ可動子82の往復移動方向、すなわちシリンダ52内のピストン54の往復移動方向が水平方向に沿うように圧縮機56を含む超電導モータ10が車両1に搭載されたとき、すなわち、図4において矢印B方向が水平方向に沿うように圧縮機56が車載されたときに、シリンダ内面とピストン外周面との間に若干の隙間が形成されるように設定されている。また、板ばね84の面直交ばね定数は、上記のように圧縮機56のピストン稼働方向が水平方向に沿うように配置された状態で、リニアモータ70を最大ストローク量で継続的に駆動した場合でも板ばね84が破損しないことを考慮して設定される。
【0057】
なお、上記においてモータハウジング72は、シリンダ52および開口部76が形成されたシリンダ形成部分と、モータ収容室78が内部に形成されたモータ収容室形成部分とに分割して構成されてもよい。また、上記モータ収容室形成部分は、両端が開口した円筒状部材と、この円筒状部材の一方開口部を閉じる円板状のエンドプレート部材とによって構成されてもよい。このようにモータハウジング72を分割形成することで、リニアモータ70、ピストン54、ピストン軸55および板ばね84を含む圧縮機56の組立易さが向上する。
【0058】
図2を再び参照すると、第1および第2の冷凍機16,17の各圧縮機56は、ピストン54の往復移動方向がロータコアシャフト18の回転中心軸Rと平行になるように超電導モータ10に対して取り付けられている。そして、図1を再び参照すると、この超電導モータ10が電気自動車1の車体8に対して、ロータシャフト18の回転中心軸Rが水平方向に沿うとともに車両進行方向と直交する姿勢で搭載されている。すなわち、本実施形態の圧縮機56の車載構造100では、車両1が水平面上の置かれたときに圧縮機56のリニアモータ可動子82の往復移動方向(矢印B方向)が水平方向に沿うと共に車両進行方向(矢印X方向)と直交するように圧縮機56が車両1に搭載されている。ここで「水平方向」とは、完全なる水平方向である場合に限らず、水平方向に対して所定角度傾斜している場合も含まれるものとし、上記所定角度は±30度であることが好ましく、±10度であることがより好ましい。また、上記「車両進行方向と直交する」とは、車両進行方向に対して完全に90度をなして交差する方向に限らず、90度を含む所定角度範囲で車両進行方向と交差する方向を含むものとし、上記所定角度範囲は60〜120度であることが好ましい。
【0059】
このような車載構造100により超電導モータ10が搭載された電気自動車1では、例えば悪路を比較的高速で走行したとき等に上下方向の周期的な振動が車体8に継続して加わっても、リニアモータ可動子82、ピストン軸55およびピストン54を含む振動系の往復移動方向が水平方向であるため、上記車体8の上下方向振動が上記振動系を共振させることがない。また、上記のように面内ばね定数が設定された、フレクシャベアリング86からなる板ばね84によって、車両上下振動時に圧縮機56の上記振動系の荷重をしっかりと受け止めることができる。そのため、リニアモータ70が破損するのを抑制でき、リニアモータ70を駆動源とする圧縮機56、この圧縮機56を含む冷凍機16,17により冷却される超電導モータ10、および、超電導モータ10を動力源とする電気自動車1の車体振動に対する信頼性が向上する。
【0060】
また、電気自動車1が加減速したときに車両進行方向の加速度が圧縮機56の上記振動系に作用することになるが、本実施形態の車載構造100では圧縮機56のリニアモータ可動子82の往復移動方向が車両進行方向と直交する方向に沿うように圧縮機56が車載されているため、このような車両進行方向の加速度変化による振動が圧縮機56の振動系に共振を生じさせることもない。
【0061】
ここで、もし電気自動車1において車両進行方向に周期的な振動が生じたとしても、その振動周波数は圧縮機56のリニアモータ70の振動周波数(例えば数十ヘルツ)に比べて極めて小さい値になると考えられる。そのため、後述するようにリニアモータ70のリニアモータ可動子82の移動方向が車両前後方向に沿うように圧縮機56が搭載されたとしても、車両前後方向の振動によってリニアモータ70が共振により破損するおそれはない。さらには、電気自動車1の旋回時に車幅方向の遠心力(いわゆる横G)が圧縮機56の振動系に作用することになるが、このような遠心力が圧縮機56の振動系を共振させるような振動として作用することはまずあり得ないので圧縮機の車載構造100において無視できるものである。
【0062】
次に、図6を参照して別実施形態の圧縮機の車載構造101を適用した電気自動車1aについて説明する。ここでは上述した電気自動車1と同一または類似の構成要素には同一または類似の符合を付して重複することとなる説明を援用により省略する。
【0063】
図6は電気自動車1a概略構成を示す。電気自動車1aにおける圧縮機の車載構造101では、圧縮機56のリニアモータ可動子82の往復移動方向が、水平方向に沿うとともに車両進行方向(矢印X方向)と平行になるように圧縮機56が車体8に搭載されている。そして、超電導モータ10のロータシャフト18は、トランスミッション11に連結されたリアドライブシャフト9aを介してリアディフェレンシャルギヤ6に接続されている。すなわち、ここでの電気自動車1aはFR(フロントエンジン・リアドライブ)車であり、2つの前輪2に接続されるフロント車軸3は、図示しない車両前部のフロントディフェレンシャルギヤにそれぞれ連結されている。これ以外の構成については上記電気自動車1の場合と同様である。
【0064】
このようにリニアモータ可動子82の往復移動方向が水平方向に沿うと共に車両進行方向と平行になるように圧縮機56を車載した場合にも、上記と同様の作用効果を奏することができる。すなわち、車両上下振動によってリニアモータ70が破損するのを抑制でき、リニアモータ70を駆動源とする圧縮機56、この圧縮機56を含む冷凍機16,17により冷却される超電導モータ10、および、超電導モータ10を動力源とする電気自動車1の車体振動に対する信頼性が向上する。また、車両前後方向の振動によってリニアモータ70が共振により破損するおそれもない。
【0065】
次に、図7を参照して、図6に示す電気自動車1aの変形例について説明する。この電気自動車1aは、4WD車(4輪駆動車)であり、トランスミッション11に連結されたフロントドライブシャフト9bがフロントディフェレンシャルギヤ6´に接続されている。これ以外の構成は、上記圧縮機の車載構造101を含めて上記電気自動車1aと同様である。この変形例の電気自動車1aによっても上記と同様の作用効果を奏することができる。
【0066】
なお、上記圧縮機の車載構造101のように、圧縮機56のリニアモータ可動子82の往復移動方向が水平方向に沿うとともに車両進行方向と平行になるように圧縮機56が車載される場合には、電気自動車1aの挙動特性(例えば、サスペンションばね定数、ピッチ角、ロール剛性等)を、車両前後方向の振動が圧縮機56の振動系に共振を生じさせないように設計してもよい。
【符号の説明】
【0067】
1,1a 電気自動車、2 前輪、3 フロント車軸、4 後輪、5 リア車軸、6 リアディフェレンシャルギヤ、6´ フロントディフェレンシャルギヤ、7 エンジンコンパートメント、8 車体、9a リアドライブシャフト、9b フロントドライブシャフト、10 超電導モータ、12 ロータ、14 ステータ、16 第1の冷凍機、17 第2の冷凍機、18 ロータシャフト、19a,19b 端部、20 ロータコア、22 永久磁石、24,26 エンドプレート、28 軸受部材、30 ステータコア、32 ティース部、33 スロット、34 コイル、35 スロット内に位置するコイル部分、36 コイルエンド部、40 モータケース、42 内筒部材、44 外筒部材、46 第1真空室、48 第2真空室、50 ブラケット、52 シリンダ、54 ピストン、55 ピストン軸、56 ガス圧縮機、58 冷却部、60 伝熱部材、70 リニアモータ、72 モータハウジング、74 ハウジング端面、76 開口部、78 モータ収容室、80 リニアモータ固定子、82 リニアモータ可動子、84 板ばね、86 フレクシャベアリング、88 ピストン軸取付穴、90 固定穴、92 スリット。
【技術分野】
【0001】
本発明は、圧縮機の車載構造に関し、特に、リニアモータを駆動源として備える圧縮機の車載構造に関する。
【背景技術】
【0002】
昨今、車載の二次電池から電力を供給し、その電力により車載のモータを駆動して走行用動力を得る電気自動車(以下、EVということがある)がCO2を排出しないゼロエミッションの観点から注目されている。走行用動力源としてエンジンとモータとを併用するハイブリッド電気自動車(以下、HEVということがある)も普及が急拡大しつつある。
【0003】
上記のような電気自動車やハイブリッド車に搭載されるモータは、限られた狭いスペースに搭載されるために小型で且つ高出力であることが求められ、その出力性能を維持するにはモータの温度上昇を抑制すること、より具体的にはステータコイルの冷却が不可欠である。
【0004】
これに関連する先行技術文献として、特開2000−125512号公報(特許文献1)には、コイルエンド接触冷却型回転電機が開示されている。この回転電機では、ステータコイルの少なくともコイルエンドを、厚さ方向がステータコアの径方向に一致する姿勢でステータコアの端面から突出する細板状導体からなる各軸方向突出部を互いに径方向に重ねて構成している。そして、このコイルエンドの径方向最外側または径方向最内側の細板状導体の平坦な主面に電気絶縁されつつ直接に密着する平坦な冷却面を有する良熱伝導性の冷却部材を設けることによりコイルエンド部2dの冷却性を向上することが記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2000−125512号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、上記EVやHEVに搭載されるモータとして、超電導モータを用いることが考えられる。超電導モータは、超電導線材からなる複数のコイルを有しており、このコイルを所定の極低温(例えば70K)に冷却して電流、厳密には直流電流を流すと電気抵抗が実質的にゼロになることから、モータひいてはEV等の低電費化を図るうえで有望である。
【0007】
超電導モータを動力源として搭載するには、超電導線材からなるコイルを極低温にまで冷却可能な冷凍機を車載する必要がある。しかし、この冷凍機についても搭載スペースの制限等の理由から、小型で高い冷凍性能であることが求められる。
【0008】
上記のような冷凍機として、例えば蓄冷型冷凍機、スターリング冷凍機などが用いられる。このスターリング冷凍機は、リニアモータよりシリンダ内で往復駆動されるピストンを含む圧縮機と、圧縮機内において圧縮および膨張が繰り返される圧縮ガスである例えばヘリウムガスが内部に流出入する蓄冷部とを備える。
【0009】
上記のようなスターリング冷凍機が車載された場合、例えば、車両が悪路を比較的高速で走行したとき車体には上下方向の周期的な振動が生じることがある。このときの振動周波数が上記スターリング冷凍機の圧縮機内におけるリニアモータのリニアモータ可動子およびピストン等からなる振動系の往復振動周波数に相当した場合には、共振により振幅が著しく大きくなって破損につながるおそれがある。
【0010】
本発明の目的は、車体の上下振動によって圧縮機を構成するリニアモータが破損しないように圧縮機を車両に搭載する車載構造を提供することにある。
【課題を解決するための手段】
【0011】
本発明に係る圧縮機の車載構造は、リニアモータ固定子、および、前記リニアモータ固定子により発生する磁界によって直線状に往復移動するリニアモータ可動子を含むリニアモータと、前記リニアモータ可動子に固定されるピストン軸と、前記ピストン軸の端部に設けられ、シリンダ内で往復移動して冷媒ガスの圧縮および膨張を行うピストンとを備える圧縮機の車載構造であって、車両が水平面上に置かれたときに前記リニアモータ可動子の移動方向が水平方向に沿うように前記圧縮機を前記車両に搭載することを特徴とするものである。
【0012】
ここで水平方向とは、完全なる水平方向である場合に限らず、水平方向に対して所定角度傾斜している場合も含むものとし、上記所定角度は±30度であることが好ましく、±10度であることがより好ましい。
【0013】
本発明に係る圧縮機の車載構造において、前記リニアモータ可動子の移動方向が前記車両の進行方向と直交する方向に沿うように前記圧縮機が前記車両に搭載されていてもよい。ここで直交方向とは、車両の進行方向に対して完全に90度をなして交差する方向に限らず、90度を含む所定角度範囲で前記車両進行方向と交差する方向も含むものとし、上記所定角度範囲は60〜120度であることが好ましい。
【0014】
また、本発明に係る圧縮機の車載構造では、前記リニアモータ可動子を貫通して固定される前記ピストン軸は前記リニアモータ可動子の軸方向両側において、前記リニアモータを収容するモータハウジング内壁に固定されたフレクシャベアリングによってそれぞれ支持されていてもよい。
【0015】
さらに、本発明に係る圧縮機の車載構造において、前記圧縮機は、前記車両の動力源である超電導モータの超電導線材からなるコイルを冷却するための蓄冷型冷凍機の一部を構成してもよい。この場合、前記冷凍機の圧縮機が前記超電導モータのモータケースの外周側壁上に一体に取り付けられていてもよい。
【発明の効果】
【0016】
本発明に係る圧縮機の車載構造によれば、例えば車両が悪路を比較的高速で走行したとき等に上下方向の振動が車体に継続して加わっても、リニアモータ可動子、ピストン軸およびピストンを含む振動系の往復移動方向が水平方向であるため、上記車体の上下方向振動が上記振動系を共振させることがなく、そのためリニアモータが破損するのを抑制でき、リニアモータを駆動源とする圧縮機、この圧縮機により冷却される超電導モータ、および、超電導モータを動力源とする電動車両の車体振動に対する信頼性が向上する。
【図面の簡単な説明】
【0017】
【図1】本発明の一実施形態である圧縮機の車載構造を適用した電気自動車の概略構成図である。
【図2】図1に示す超電導モータの軸方向に沿った断面図(一部側面を含む)である。
【図3】図2におけるA−A線断面図である。
【図4】冷凍機の圧縮部の縦断面図(一部側面を含む)である。
【図5】図4に示す圧縮部に含まれるフレクシャベアリングを示す斜視図である。
【図6】本発明の別実施形態である圧縮機の車載構造を適用した電気自動車の概略構成図である。
【図7】図6に示す電気自動車の変形例を示す概略構成図である。
【発明を実施するための形態】
【0018】
以下に、本発明に係る実施の形態について添付図面を参照しながら詳細に説明する。この説明において、具体的な形状、材料、数値、方向等は、本発明の理解を容易にするための例示であって、用途、目的、仕様等にあわせて適宜変更することができる。
【0019】
以下の説明では、電動車両として電気自動車を例に説明するが、本発明はハイブリッド車両等の他の電動車両に適用されてもよい。
【0020】
図1は本発明の一実施形態である圧縮機の車載構造100を採用した電気自動車1の概略構成を示す。図1において、矢印X方向が車両進行方向すなわち車両前後方向を示し、車両進行方向と直交する矢印Y方向が車両左右方向すなわち車幅方向を示す。また、図1において、紙面に沿う方向が車両が水平面上の置かれたときの水平方向であり、紙面に垂直な方向が鉛直方向である。
【0021】
電気自動車1は、走行用動力源として超電導モータ12を搭載している。超電導モータ10のロータシャフト18(図2参照)は、超電導モータ10と一体に設けられたトランスミッション11を介して、2つの前輪2にそれぞれ連結されるフロント車軸3に接続されている。これにより、超電導モータ10のロータシャフト18から出力される回転動力がトランスミッション11およびフロント車軸3を介して前輪2に伝達されるようになっている。
【0022】
また、電気自動車1は、2つの後輪4と、各後輪4にそれぞれ接続されるリア車軸5と、リア車軸5が連結されるリアディファレンシャルギヤ6とを備える。2つの後輪4は、電気自動車1の走行時に従動回転することになる。
【0023】
超電導モータ10は、電気自動車1の前部に位置するエンジンコンパートメント7内に搭載されている。超電導モータ10は、図示しないブラケットやマウント等の取付部材を介して車体8に対して固定されている。すなわち電気自動車10は、FF(フロントエンジン・フロントドライブ)車である。
【0024】
超電導モータ10は、第1および第2の冷凍機16,17を一体に備えている。各冷凍機16,17は、リニアモータを内蔵した圧縮部をそれぞれ有しており、電動車両1が水平面上に置かれたときに各圧縮部のリニアモータ可動子の移動方向が水平方向に沿うよう上記圧縮機を電気自動車に搭載した車載構造100を採用している。次に、図2,3を参照して超電導モータ10について詳細に説明する。
【0025】
図2,3に示すように、超電導モータ10は、回転可能に支持されたロータ12と、ロータ12の外周を覆って設けられる略円筒状のステータ14と、超電導モータ10の軸方向両端面に固定された2つの冷凍機16,17とを備える。ここでの説明において、ロータ12の中心を貫通するロータシャフト18の回転中心軸Rに関し、これに沿う方向を軸方向といい、回転中心軸Rと直交する放射方向を径方向といい、回転中心軸Rを中心点として前記放射方向を含む平面上に描かれる円形に沿う方向を周方向という。
【0026】
ロータ12は、例えば電磁鋼板を積層してカシメや溶接等により一体に構成される円筒状のロータコア20と、ロータコア20の中心穴を貫通して固定された丸棒鋼材等からなるロータシャフト18とを含む。ロータコア20の外周面には、複数(本実施形態では6つ又は6箇所)の永久磁石22が露出した状態で周方向に等間隔に固定されている。ただし、ロータコア20に設けられる永久磁石は、外周面に露出していなくてもよく、外周面近傍の内部に埋設されてもよい。
【0027】
ロータ12のロータシャフト18は、その両端部19a,19bにおいて、超電導モータ10の軸方向両端面を形成する円盤状のエンドプレート24,26に固定された軸受部材28によって回転可能に支持されている。これにより、ステータ14の内部に回転磁界が形成されると、これに伴ってロータコア20の永久磁石22がひきつけられて、ロータ12が回転駆動されるようになっている。
【0028】
ステータ14は、略円筒状をなす固定子鉄心であるステータコア30を含む。ステータコア30の内周部には、径方向内側へ突出する複数(本実施形態では9つ)のティース部32が周方向に等間隔に形成されている。ステータコア30は、例えば複数の略円環状の電磁鋼板を軸方向に積層してカシメ、接着、溶接等によって一体に組み付けて構成されることができる。ただし、ステータコア30は、各々1つのティース部を有する9つの分割ステータコアを円環状に連ねて配置してその外側から筒状の締結部材により締め付けることによって構成されてもよい。この場合、分割ステータコアは、圧粉磁心により形成されることができる。
【0029】
ステータコア30のティース部32には、超電導線材からなるコイル34が巻装されている。超電導線材は、断面形状が円形状でもよいし、あるいは、矩形状であってもよい。また、超電導線材には、例えば、イットリウム系超電導材料やビスマス系超電導材料が好適に用いられる。ただし、超電導線材を構成する超電導材料は、これらに限定されるものではなく、他の公知の超電導材料、あるいは、将来開発される、より高温で超電導特性を発現する超電導材料であってもよい。
【0030】
コイル34を構成する超電導線材は、絶縁被覆されていてもよい。これにより、コイル34として密着して巻回されたときに各ターン間での電気絶縁が確保される。ただし、超電導線材が絶縁被覆されていない場合、コイル34に形成するときに絶縁紙や絶縁フィルム等を挟みながらコイル状に巻くことで各ターン間の電気絶縁が確保されてもよい。
【0031】
コイル34は、隣接するティース部32間に形成されるスロット内に位置する部分35と、ステータコア30の軸方向両端面から外側へそれぞれ突出するコイルエンド部36とを含む。各コイル34は、2つ置きごとのコイル34と直列接続されてU,V,Wの各相コイルを構成する。各相コイルの一方端は、図示しない中性点において互いに接続され、各相コイルの他方端は図示しない各相電流導入端子にそれぞれ接続されている。
【0032】
超電導モータ10は、円筒状のモータケース40を有している。モータケース40内に、ロータ12およびステータ14が収容されている。モータケース40の軸方向の両端部は、エンドプレート24,26の外周縁部に気密状態で連結されている。モータケース40およびエンドプレート24,26は、例えばステンレス等の非磁性材料から形成される。なお、モータケース40は、エンドプレート24または26と一体のものとして形成されてもよい。
【0033】
モータケース40内には、各々円筒状をなす内筒部材42および外筒部材44がロータ12と同心上に配置されている。内筒部材42および外筒部材44の軸方向両端部は、エンドプレート24,26の内面に気密状態を保持可能に連結されている。内筒部材42は、磁界の通過を妨げず且つ非導電性である非金属材料により形成されるのが好ましい。一方、外筒部材44は、低熱伝導率材料(例えばFRP等)で形成されるのが好ましく、低熱伝導率の非磁性材料で形成されるのがより好ましい。
【0034】
内筒部材42は、ロータ12のロータコア20よりも若干大きい内径を有し、ロータコア20の外周面との間に周方向に一様な隙間が形成されている。また、内筒部材42と外筒部材44との間には、筒状空間からなる第1真空室46が形成されている。第1真空室46内には、コイル34を含むステータ14が収容されている。ステータ14のステータコア30の外周面が、外筒部材44の内周面上に密着して固定されている。
【0035】
第1真空室46は、冷凍機16,17を含めて超電導モータ10が組み立てられた後に、エンドプレート24,26の少なくとも何れかに形成された図示しない空気抜き穴から真空引きされて、真空状態に維持される。このように、熱伝導率が低い内筒部材42および外筒部材44で区画形成し、かつ、内部を真空とすることで、第1真空室46内に収容されたコイル34を含むステータ14への断熱性を高めることができる。
【0036】
さらに、外筒部材44とモータケース40との間には、筒状空間からなる第2真空室48が形成されている。第2真空室48もまた、第1真空室46と同様に真空状態になっている。これにより、第1真空室46内に収容されたコイル34を含むステータ14が第2真空室48によってモータ外部と隔てられることで、コイル34を含むステータ14に対する断熱効果をより一層高めることができる。
【0037】
超電導モータ10において、軸方向の一端側に位置するエンドプレート24には第1の冷凍機16が設けられ、軸方向の他端側に位置するエンドプレート26には第2の冷凍機17が設けられている。第1および第2の冷凍機16,17は、気密状態を確保しつつエンドプレート24,26の貫通穴の周囲に固定された筒状のブラケット50を介してそれぞれ取り付けられている。このように2つの冷凍機16,17を超電導モータの一部として一体に設けることで、車載する際に必要となるスペースをできるだけ小さくすることができる。
【0038】
なお、ここでは2つの冷凍機16,17を超電導モータ10の各エンドプレート24,26にそれぞれ設けるものとして説明するが、1つの冷凍機のみを含むように超電導モータが構成されてもよい。
【0039】
第1および第2の冷凍機16,17は、シリンダ52内でピストン54が直線的に往復移動して冷媒ガス(例えば、Heガス)の圧縮および膨張を繰り返し行うガス圧縮機(以下、単に圧縮機という)56をそれぞれ有する。また、第1および第2の冷凍機16,17は、筒状のブラケット50内からエンドプレート24,26の貫通穴を介して第1真空室46まで延伸した段付き柱状外形状を有する冷却部58をそれぞれ備える。冷却部58の平坦な先端面は、伝熱部材60を介してコイルエンド部36にそれぞれ接触している。ここで、コイルエンド部36と伝熱部材60との間、および、伝熱部材60と冷却部58との間の少なくともいずれか一方に絶縁紙等の絶縁部材を介在させて、コイル34と冷凍機16,17間の電気絶縁が確保されてもよい。
【0040】
第1および第2の冷凍機16,17は、超電導線材からなるコイル34が超電導特性を発現する所望の極低温(例えば、約70K)まで冷却可能な冷却性能を有し、ピストン54のストロークを制御することによって冷却温度を調節することができる。電気自動車1の走行用動力源として搭載される超電導モータ10は、設置スペースの制約や車両重量の軽量化のため冷凍機16,17は小型で軽量のものであることが好ましい。例えば、第1および第2の冷凍機16,17には、蓄冷型スターリング冷凍機が好適に用いられる。ただし、設置スペースおよび重量の制約が緩い場合、例えば、超電導モータ10が電車や船舶等の大型の移動体の動力源として、あるいは、設置位置が固定された機械の動力源として用いられる場合には、上記のような冷却性能を有する冷凍機であれば、体格が大きくて重い冷凍機であっても構わない。
【0041】
第1および第2の冷凍機16,17は、各ピストン54の移動方向が同一直線上となるように対向配置されている。すなわち、第1および第2の冷凍機16,17は、軸方向に対向して設けられている。そして、第1および第2の冷凍機16,17では、各ピストン54が互いに反対方向に移動するように圧縮機56を駆動する。換言すれば、第1および第2の冷凍機16,17において、ピストン54による圧縮ストロークと膨張ストロークとが互いに同期するように駆動される。このような配置および駆動にすることで、ピストン54の移動によって第1および第2の冷凍機16,17が超電導モータ10に及ぼす回転モーメントが相殺されて、振動や騒音を抑制できる。
【0042】
なお、上記では第1および第2の冷凍機16,17を各エンドプレート24,26上に固定するものとして説明したが、これに限定されず、各冷凍機16,17の圧縮機56をモータケース40の外周側壁上に固定し、各圧縮機56からそれぞれ延伸する圧縮ガス流路管を各冷凍機16,17の冷却部58にそれぞれ接続する構成としてもよい。このようにすれば、超電導モータ10の軸方向の幅を小さくすることができ、車両搭載性が向上する。
【0043】
第1の冷凍機16の冷却部58の軸方向先端面が接触する伝熱部材60は、例えば熱伝導性が良好な金属板で形成され、周方向に連なった円環状をなして軸方向一方側に位置する全てのコイルエンド部36に接触している。一方、第2の冷凍機17の冷却部58の軸方向先端面が接触する伝熱部材60は、例えば熱伝導性が良好な金属板で形成され、周方向に連なった円環状をなして、軸方向他方側に位置する全てのコイルエンド部36に接触している。これにより、各冷凍機16,17の冷却部58が伝熱部材60を介してコイルエンド部36から吸熱してコイル34を冷却することができる。
【0044】
伝熱部材60のコイル対向面には、コイルエンド部36が嵌合する凹部または溝が形成されている。このようにすることで、コイルエンド部36と伝熱部材60との接触面積が増加し、コイル34の冷却効率を上げることができる。
【0045】
また、伝熱部材60は、絶縁性樹脂材料を成型することによってコイルエンド部36に一体に形成されてもよい。これにより、コイル34と冷凍機16,17の冷却部58間の電気絶縁性がより向上する。この場合、伝熱部材60の熱伝導性を良好にするために、金属製の粒子または粉末を上記絶縁性樹脂材料に分散させるのが好ましい。
【0046】
このように本実施形態の超電導モータ10では、2つの冷凍機16,17によって、熱容量が大きいステータコア30を介在させることなく、コイル34を軸方向両側から効率よく迅速に所望の極低温まで冷却することができる。そのため、超電導モータ10の始動時間の短時間化、および、冷凍機の消費電力の低減を図れる。
【0047】
また、本実施形態の超電導モータ10では、第1および第2の冷凍機16,17は、各ピストン54の移動方向が同一直線上となるように配置され、かつ、各ピストン54が互いに反対方向に移動するように圧縮機56が駆動されることで、ピストン54の移動によって第1および第2の冷凍機16,17が超電導モータ10に及ぼす回転モーメントが相殺されて振動や騒音を抑制できる。
【0048】
続いて、図4,5を参照して第1および第2の冷凍機16,17の圧縮機56について詳細に説明する。ここでは第2の冷凍機17の圧縮機56を例に説明するが、第1の冷凍機56の圧縮機56も同一構成を有している。
【0049】
上述したように圧縮機56は、円筒状空間を内包するシリンダ52と、シリンダ52内で矢印B方向に沿って直線状に往復移動する円柱状のピストン54とを備える。ピストン54は、シリンダ52の内径よりも若干小径に形成されており、後述するようにシリンダ内面との間に若干の隙間を形成しつつ非接触状態でシリンダ52内を往復移動可能なように設計されている。
【0050】
シリンダ52は、ピストン54を駆動するためのリニアモータ70を収容するモータハウジング72内に形成されている。モータハウジング72の矢印B方向の一方側端面74には、圧縮される冷媒ガスが流出入する開口部76がシリンダ52と連通して形成されている。
【0051】
上記リニアモータ70は、モータハウジング72内において上記シリンダ52に対して上記開口部76とは反対側に形成されたモータ収容室78内に配置されている。リニアモータ70は、リニアモータ固定子82と、リニアモータ可動子82とを含んで構成されている。リニアモータ固定子80は、モータ収容室78内の内壁に対してねじ止め等の手段によって固定されている。リニアモータ固定子80の内周部には、複数のコイルが巻装されている。これらのコイルに通電することによって、リニアモータ固定子80の内側には、矢印B方向に移動する磁界が形成されるようになっている。
【0052】
一方、リニアモータ固定子80の内側には、リニアモータ可動子82が非接触状態に配置されている。リニアモータ可動子82は、永久磁石を含んで構成される永久磁石型可動子であってもよいし、あるいは、コイル通電によって励磁される電磁気型可動子であってもよい。このようなリニアモータ可動子82は、リニアモータ固定子80により形成される移動磁界に対する反発力および引付力によって、直線状に往復駆動されるようになっている。
【0053】
リニアモータ可動子82の中心部分には、ピストン軸55が貫通して固定されている。リニアモータ可動子82とピストン軸55との固定方法は、溶接、カシメ、ねじ止め等の種々の手段が採用可能である。ピストン軸55の一端部(図4中の左側端部)には、ピストン54が連結されている。ピストン軸55は、リニアモータ可動子82を間にしてその両側において、板ばね84によってそれぞれ支持されている。ピスト軸55は、板ばね84に対して固定されている。具体的には、ピストン軸55に対して外装された板ばね84は、溶接、カシメ、ねじ止め等の種々の手段によってピストン軸55の外周面上に固定されることができる。
【0054】
板ばね84は、図5に示すような例えば薄鋼板からなる円板状の板ばねであるフレクシャベアリング86を複数枚重ね合わせて構成されている。フレクシャベアリング86は、中心部にピストン軸取付穴88が形成されるとともに、外周縁部に複数の固定穴90が周方向に均等配置で形成されている。これらの固定穴90に挿通されるボルトと必要に応じて前記ボルトに螺合するナットとによって、複数枚のフレクシャベアリング86からなる板ばね84はモータ収容室78の内壁に対して固定されている。
【0055】
また、フレクシャベアリング86には、ピストン軸取付穴88を取り囲んで3本の渦巻状のスリット92が周方向に均等配置で形成されている。これらのスリット92の数、幅、長さ、形状等は、板ばね84について所望の面内ばね定数および面直交ばね定数が得られるように適宜に設計される。ここで、面内ばね定数は、中心取付穴88に固定された、ピストン54、ピストン軸55およびリニアモータ可動子82を含む振動系を板ばね86の中心位置にシリンダ52に対して同軸状に保持するための弾性定数であり、他方、面直交ばね定数は、リニアモータ70による駆動によって往復移動するピストン54等からなる振動系の共振状態が確保されるように設定される弾性定数である。
【0056】
上記板ばね84の面内ばね定数は、圧縮機56内のリニアモータ可動子82の往復移動方向、すなわちシリンダ52内のピストン54の往復移動方向が水平方向に沿うように圧縮機56を含む超電導モータ10が車両1に搭載されたとき、すなわち、図4において矢印B方向が水平方向に沿うように圧縮機56が車載されたときに、シリンダ内面とピストン外周面との間に若干の隙間が形成されるように設定されている。また、板ばね84の面直交ばね定数は、上記のように圧縮機56のピストン稼働方向が水平方向に沿うように配置された状態で、リニアモータ70を最大ストローク量で継続的に駆動した場合でも板ばね84が破損しないことを考慮して設定される。
【0057】
なお、上記においてモータハウジング72は、シリンダ52および開口部76が形成されたシリンダ形成部分と、モータ収容室78が内部に形成されたモータ収容室形成部分とに分割して構成されてもよい。また、上記モータ収容室形成部分は、両端が開口した円筒状部材と、この円筒状部材の一方開口部を閉じる円板状のエンドプレート部材とによって構成されてもよい。このようにモータハウジング72を分割形成することで、リニアモータ70、ピストン54、ピストン軸55および板ばね84を含む圧縮機56の組立易さが向上する。
【0058】
図2を再び参照すると、第1および第2の冷凍機16,17の各圧縮機56は、ピストン54の往復移動方向がロータコアシャフト18の回転中心軸Rと平行になるように超電導モータ10に対して取り付けられている。そして、図1を再び参照すると、この超電導モータ10が電気自動車1の車体8に対して、ロータシャフト18の回転中心軸Rが水平方向に沿うとともに車両進行方向と直交する姿勢で搭載されている。すなわち、本実施形態の圧縮機56の車載構造100では、車両1が水平面上の置かれたときに圧縮機56のリニアモータ可動子82の往復移動方向(矢印B方向)が水平方向に沿うと共に車両進行方向(矢印X方向)と直交するように圧縮機56が車両1に搭載されている。ここで「水平方向」とは、完全なる水平方向である場合に限らず、水平方向に対して所定角度傾斜している場合も含まれるものとし、上記所定角度は±30度であることが好ましく、±10度であることがより好ましい。また、上記「車両進行方向と直交する」とは、車両進行方向に対して完全に90度をなして交差する方向に限らず、90度を含む所定角度範囲で車両進行方向と交差する方向を含むものとし、上記所定角度範囲は60〜120度であることが好ましい。
【0059】
このような車載構造100により超電導モータ10が搭載された電気自動車1では、例えば悪路を比較的高速で走行したとき等に上下方向の周期的な振動が車体8に継続して加わっても、リニアモータ可動子82、ピストン軸55およびピストン54を含む振動系の往復移動方向が水平方向であるため、上記車体8の上下方向振動が上記振動系を共振させることがない。また、上記のように面内ばね定数が設定された、フレクシャベアリング86からなる板ばね84によって、車両上下振動時に圧縮機56の上記振動系の荷重をしっかりと受け止めることができる。そのため、リニアモータ70が破損するのを抑制でき、リニアモータ70を駆動源とする圧縮機56、この圧縮機56を含む冷凍機16,17により冷却される超電導モータ10、および、超電導モータ10を動力源とする電気自動車1の車体振動に対する信頼性が向上する。
【0060】
また、電気自動車1が加減速したときに車両進行方向の加速度が圧縮機56の上記振動系に作用することになるが、本実施形態の車載構造100では圧縮機56のリニアモータ可動子82の往復移動方向が車両進行方向と直交する方向に沿うように圧縮機56が車載されているため、このような車両進行方向の加速度変化による振動が圧縮機56の振動系に共振を生じさせることもない。
【0061】
ここで、もし電気自動車1において車両進行方向に周期的な振動が生じたとしても、その振動周波数は圧縮機56のリニアモータ70の振動周波数(例えば数十ヘルツ)に比べて極めて小さい値になると考えられる。そのため、後述するようにリニアモータ70のリニアモータ可動子82の移動方向が車両前後方向に沿うように圧縮機56が搭載されたとしても、車両前後方向の振動によってリニアモータ70が共振により破損するおそれはない。さらには、電気自動車1の旋回時に車幅方向の遠心力(いわゆる横G)が圧縮機56の振動系に作用することになるが、このような遠心力が圧縮機56の振動系を共振させるような振動として作用することはまずあり得ないので圧縮機の車載構造100において無視できるものである。
【0062】
次に、図6を参照して別実施形態の圧縮機の車載構造101を適用した電気自動車1aについて説明する。ここでは上述した電気自動車1と同一または類似の構成要素には同一または類似の符合を付して重複することとなる説明を援用により省略する。
【0063】
図6は電気自動車1a概略構成を示す。電気自動車1aにおける圧縮機の車載構造101では、圧縮機56のリニアモータ可動子82の往復移動方向が、水平方向に沿うとともに車両進行方向(矢印X方向)と平行になるように圧縮機56が車体8に搭載されている。そして、超電導モータ10のロータシャフト18は、トランスミッション11に連結されたリアドライブシャフト9aを介してリアディフェレンシャルギヤ6に接続されている。すなわち、ここでの電気自動車1aはFR(フロントエンジン・リアドライブ)車であり、2つの前輪2に接続されるフロント車軸3は、図示しない車両前部のフロントディフェレンシャルギヤにそれぞれ連結されている。これ以外の構成については上記電気自動車1の場合と同様である。
【0064】
このようにリニアモータ可動子82の往復移動方向が水平方向に沿うと共に車両進行方向と平行になるように圧縮機56を車載した場合にも、上記と同様の作用効果を奏することができる。すなわち、車両上下振動によってリニアモータ70が破損するのを抑制でき、リニアモータ70を駆動源とする圧縮機56、この圧縮機56を含む冷凍機16,17により冷却される超電導モータ10、および、超電導モータ10を動力源とする電気自動車1の車体振動に対する信頼性が向上する。また、車両前後方向の振動によってリニアモータ70が共振により破損するおそれもない。
【0065】
次に、図7を参照して、図6に示す電気自動車1aの変形例について説明する。この電気自動車1aは、4WD車(4輪駆動車)であり、トランスミッション11に連結されたフロントドライブシャフト9bがフロントディフェレンシャルギヤ6´に接続されている。これ以外の構成は、上記圧縮機の車載構造101を含めて上記電気自動車1aと同様である。この変形例の電気自動車1aによっても上記と同様の作用効果を奏することができる。
【0066】
なお、上記圧縮機の車載構造101のように、圧縮機56のリニアモータ可動子82の往復移動方向が水平方向に沿うとともに車両進行方向と平行になるように圧縮機56が車載される場合には、電気自動車1aの挙動特性(例えば、サスペンションばね定数、ピッチ角、ロール剛性等)を、車両前後方向の振動が圧縮機56の振動系に共振を生じさせないように設計してもよい。
【符号の説明】
【0067】
1,1a 電気自動車、2 前輪、3 フロント車軸、4 後輪、5 リア車軸、6 リアディフェレンシャルギヤ、6´ フロントディフェレンシャルギヤ、7 エンジンコンパートメント、8 車体、9a リアドライブシャフト、9b フロントドライブシャフト、10 超電導モータ、12 ロータ、14 ステータ、16 第1の冷凍機、17 第2の冷凍機、18 ロータシャフト、19a,19b 端部、20 ロータコア、22 永久磁石、24,26 エンドプレート、28 軸受部材、30 ステータコア、32 ティース部、33 スロット、34 コイル、35 スロット内に位置するコイル部分、36 コイルエンド部、40 モータケース、42 内筒部材、44 外筒部材、46 第1真空室、48 第2真空室、50 ブラケット、52 シリンダ、54 ピストン、55 ピストン軸、56 ガス圧縮機、58 冷却部、60 伝熱部材、70 リニアモータ、72 モータハウジング、74 ハウジング端面、76 開口部、78 モータ収容室、80 リニアモータ固定子、82 リニアモータ可動子、84 板ばね、86 フレクシャベアリング、88 ピストン軸取付穴、90 固定穴、92 スリット。
【特許請求の範囲】
【請求項1】
リニアモータ固定子、および、前記リニアモータ固定子により発生する磁界によって直線状に往復移動するリニアモータ可動子を含むリニアモータと、前記リニアモータ可動子に固定されるピストン軸と、前記ピストン軸の端部に設けられ、シリンダ内で往復移動して冷媒ガスの圧縮および膨張を行うピストンとを備える圧縮機の車載構造であって、
前記リニアモータ可動子の移動方向が水平方向に沿うように前記圧縮機を車両に搭載することを特徴とする圧縮機の車載構造。
【請求項2】
請求項1に記載の圧縮機の車載構造において、
前記リニアモータ可動子の移動方向が前記車両の進行方向と直交する方向に沿うように前記圧縮機が前記車両に搭載されていることを特徴とする圧縮機の車載構造。
【請求項3】
請求項1または2に記載の圧縮機の車載構造において、
前記リニアモータ可動子を貫通して固定される前記ピストン軸は前記リニアモータ可動子の軸方向両側において、前記リニアモータを収容するモータハウジング内壁に固定されたフレクシャベアリングによってそれぞれ支持されていることを特徴とする圧縮機の車載構造。
【請求項4】
請求項1〜3のいずれか一項に記載の圧縮機の車載構造において、
前記圧縮機は、前記車両の動力源である超電導モータの超電導線材からなるコイルを冷却するための蓄冷型冷凍機の一部を構成することを特徴とする圧縮機の車載構造。
【請求項5】
請求項4に記載の圧縮機の車載構造において、
前記冷凍機の圧縮機が前記超電導モータのモータケースの外周側壁上に一体に取り付けられていることを特徴とする圧縮機の車載構造。
【請求項1】
リニアモータ固定子、および、前記リニアモータ固定子により発生する磁界によって直線状に往復移動するリニアモータ可動子を含むリニアモータと、前記リニアモータ可動子に固定されるピストン軸と、前記ピストン軸の端部に設けられ、シリンダ内で往復移動して冷媒ガスの圧縮および膨張を行うピストンとを備える圧縮機の車載構造であって、
前記リニアモータ可動子の移動方向が水平方向に沿うように前記圧縮機を車両に搭載することを特徴とする圧縮機の車載構造。
【請求項2】
請求項1に記載の圧縮機の車載構造において、
前記リニアモータ可動子の移動方向が前記車両の進行方向と直交する方向に沿うように前記圧縮機が前記車両に搭載されていることを特徴とする圧縮機の車載構造。
【請求項3】
請求項1または2に記載の圧縮機の車載構造において、
前記リニアモータ可動子を貫通して固定される前記ピストン軸は前記リニアモータ可動子の軸方向両側において、前記リニアモータを収容するモータハウジング内壁に固定されたフレクシャベアリングによってそれぞれ支持されていることを特徴とする圧縮機の車載構造。
【請求項4】
請求項1〜3のいずれか一項に記載の圧縮機の車載構造において、
前記圧縮機は、前記車両の動力源である超電導モータの超電導線材からなるコイルを冷却するための蓄冷型冷凍機の一部を構成することを特徴とする圧縮機の車載構造。
【請求項5】
請求項4に記載の圧縮機の車載構造において、
前記冷凍機の圧縮機が前記超電導モータのモータケースの外周側壁上に一体に取り付けられていることを特徴とする圧縮機の車載構造。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−240731(P2011−240731A)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2010−112065(P2010−112065)
【出願日】平成22年5月14日(2010.5.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成22年5月14日(2010.5.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
[ Back to top ]