
圧縮機の駆動トルク演算装置及び可変容量圧縮機の容量制御システム
【課題】汎用性が高く、かつ冷凍サイクルの効率を低下させることなく、圧縮機の駆動トルクを正確に演算可能な駆動トルク演算装置を提供する。
【解決手段】圧縮機、放熱器、膨張装置、蒸発器を順次接続してなる冷凍サイクルに適用される圧縮機の駆動トルク演算装置であって、エンジンECU400は、駆動トルク演算手段412において、膨張装置を通過する冷媒の質量流量Grを変数として含む演算式により圧縮機の駆動トルクを演算する。
【解決手段】圧縮機、放熱器、膨張装置、蒸発器を順次接続してなる冷凍サイクルに適用される圧縮機の駆動トルク演算装置であって、エンジンECU400は、駆動トルク演算手段412において、膨張装置を通過する冷媒の質量流量Grを変数として含む演算式により圧縮機の駆動トルクを演算する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エアコンシステムに使用される圧縮機のトルクを演算する技術に関する。
【背景技術】
【0002】
例えば車両エアコンシステムに用いられる圧縮機の駆動トルクは、エンジンにとって大きな負荷となっており、このため圧縮機の駆動トルクを演算または検知することは従来から重要な技術課題であった。特に可変容量圧縮機では、高外気温度領域において最大吐出容量で動作している場合と、低外気温度領域において吐出容量制御状態で動作している場合とで圧縮機の駆動トルクが大きく変化するため、圧縮機の駆動トルクを演算または検知することが必要とされている。圧縮機の駆動トルクを正確に演算または検知できない場合には、例えば車両アイドリング時において、エンジン回転速度の安定した制御が困難となるばかりでなく、エンジンストールに至る虞がある。
【0003】
圧縮機の駆動トルクTrは、以下の式(1)〜(3)により、圧縮仕事Lから理論的に求めることができる。
【0004】
【数2】

【0005】
ここで、Ncは圧縮機の回転速度、ηmは機械効率、nはポリトロープ指数、Grは冷媒質量流量、Psは吸入圧力、Vsは吸入冷媒比体積、Pdは吐出圧力、ηvは体積効率、Vcは容積である。
上記の式(1)〜(3)により圧縮機のトルクを求める方法では、可変容量圧縮機のように容積Vcが変化するようなものでは、冷媒質量流量Grを正確に演算または検知することは困難であった。
【0006】
そこで、特許文献1に記載されているように、容量制御弁のソレノイドの通電量と外気温度とから圧縮機のトルクを演算する方法が開発されている。この方法では、容積Vcが変化して吸入圧力Psが変動する場合でも圧縮機の駆動トルクの演算が可能であり、更には検知手段を削減することも可能であってコストダウンを図ることができる。
また、特許文献2には、圧縮機の吐出室と凝縮器との間に絞りを設けるとともに、絞りの上流側と下流側との差圧を機械的に検知する差圧検知手段を備え、この差圧検知手段が検知した差圧に基づいて自律的に弁開度調整可能とし、更には差圧検知手段の設定差圧を変更可能な電磁アクチュエータを備えた容量制御弁を有する可変容量圧縮機が記載されており、この容量制御弁において、電磁アクチュエータのコイルに流れる電流を変数として圧縮機の駆動トルクを演算する方法が記載されている。この方法では、冷媒流量(冷媒吐出量)が差圧検知手段で検知される差圧ΔPの関数であり、また差圧ΔPはコイルの電流Iの関数であるため、冷媒流量を簡易な方法で検知でき、駆動トルクの演算が容易となる利点がある。
【特許文献1】特開平10−38717号公報
【特許文献2】特開2001−317467号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載の方法では、ソレノイドの通電量と外気温度のみから駆動トルクを簡易的に演算しており、演算精度を十分に確保することが困難であった。
一方、特許文献2に記載の方法は、現在主流となっている吸入圧力が所定値になるように吐出容量を自律制御する可変容量圧縮機には適用できず、ソレノイドのない固定容量圧縮機にも適用できない。即ち、特許文献2に記載の方法では圧縮機のトルク演算方法としては汎用性が低いという問題点がある。また、特許文献2に記載の方法では、圧縮機の吐出室と凝縮器との間に絞りを設けることから、圧力損失が増加し、冷凍サイクルの効率が低下してしまう。更には、差圧ΔPに基づいて吐出容量をフィードバック制御する可変容量圧縮機にこの方法を採用すると、冷媒の循環量が不足している状態で圧縮機を運転させたときに、差圧ΔPが目標値に達することができず、吐出容量が加速的に増大し、常に最大容量で動作する虞もある。
【0008】
そこで、本願は上述した事情に基づいてなされ、圧縮機の構造に拘わらず広く適用可能であるとともに、冷凍サイクルの効率を低下させることなく、圧縮機の駆動トルクを正確に演算可能な駆動トルク演算装置を提供することを目的としている。
【課題を解決するための手段】
【0009】
上記の目的を達成するべく、本発明によれば、圧縮機、放熱器、膨張装置、蒸発器を順次接続してなる冷凍サイクルに適用される圧縮機の駆動トルク演算装置であって、前記膨張装置を通過する冷媒の質量流量を変数として含む演算式により前記圧縮機の駆動トルクを演算することを特徴とする圧縮機の駆動トルク演算装置が提供される(請求項1)。
好ましくは、前記膨張装置を通過する冷媒の質量流量Grを次式により演算する(請求項2)。
【0010】
【数3】
【0011】
ここで、ρは前記膨張装置の入口冷媒密度、Pexp1は前記膨張装置の入口圧力、Pexp2は前記膨張装置の出口圧力、Kは係数である。
好ましくは、前記駆動トルクを演算する演算式は、更に前記圧縮機の吐出圧力領域の圧力、吸入圧力領域の圧力及び前記圧縮機の回転速度を変数として含む(請求項3)。
好ましくは、前記冷凍サイクルの高圧領域での圧力である高圧圧力を検出する高圧圧力検知手段が備えられ、前記膨張装置の入口圧力を前記高圧圧力検知手段により検知された高圧圧力を変数として演算する(請求項4)。
【0012】
好ましくは、前記高圧圧力検知手段を前記高圧領域におけるガス領域に設置する(請求項5)。
好ましくは、前記冷凍サイクルの低圧領域での圧力である低圧圧力を検知する低圧圧力検知手段を備え、前記膨張装置の出口圧力を前記低圧圧力検知手段により検知された低圧圧力を変数として演算する(請求項6)。
【0013】
好ましくは、前記圧縮機は、冷媒が吸入される吸入圧力領域と、該吸入された冷媒を圧縮する圧縮機構と、該圧縮された冷媒が吐出される吐出圧力領域と、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量機構と、当該可変容量機構を作動させる制御圧力を蓄える制御圧力室と、前記吸入圧力領域の圧力を検知する検知部材を有する弁機構と、前記弁機構に電磁力を作用させるソレノイドとから構成されて前記制御圧力室の圧力を変更する容量制御弁とを具備し、外部情報を検知する外部情報検知手段により検知された外部情報に基づいて前記容量制御弁の開度を調整し、前記制御圧力室の圧力を変化させて前記可変容量機構を作動させ、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量圧縮機であって、前記吸入圧力検知部材が前記低圧圧力検知手段を構成し、前記吸入圧力領域の圧力を前記ソレノイドの通電量またはこれに相当する制御信号を変数として演算し、該演算された前記吸入圧力領域の圧力を変数として前記膨張装置の出口圧力を演算する(請求項7)。
【0014】
好ましくは、前記圧縮機は、冷媒が吸入される吸入圧力領域と、該吸入された冷媒を圧縮する圧縮機構と、該圧縮された冷媒が吐出される吐出圧力領域と、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量機構と、該可変容量機構を作動させる制御圧力を蓄える制御圧力室と、前記吐出圧力領域の圧力を受ける第1受圧面と、該第1受圧面に作用する前記吐出圧力領域の圧力と対向する方向に前記吸入圧力領域の圧力を受ける第2受圧面とが形成された感圧部材を有する弁機構と、前記感圧部材に作用する前記吐出圧力領域の圧力による力と対抗する方向に前記弁機構に電磁力を作用させるソレノイドとから構成されて前記制御圧力室の圧力を変更する容量制御弁とを具備し、外部情報を検知する外部情報検知手段により検知された外部情報に基づいて前記容量制御弁の開度を調整し、前記制御圧力室の圧力を変化させて前記可変容量機構を作動させ、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量圧縮機であって、前記吸入圧力領域の圧力は、前記高圧圧力検知手段により検知された高圧圧力と、前記ソレノイドの通電量またはこれに相当する制御信号と、を変数として演算し、該演算された前記吸入圧力領域の圧力を変数として前記膨張装置の出口圧力を演算する(請求項8)。
【0015】
好ましくは、前記膨張装置の入口圧力及び前記膨張装置の出口圧力を演算する演算式は、更に前記冷凍サイクルの熱負荷情報及び前記圧縮機の回転数の少なくともいずれか1つの外部情報を変数として演算する(請求項9)。
好ましくは、前記膨張装置の入口冷媒密度は、前記膨張装置の入口冷媒温度及び前記高圧圧力検知手段により検知された高圧圧力の少なくともいずれか1つを変数として演算する(請求項10)。
【0016】
好ましくは、前記膨張装置は弁機構を有し、前記係数Kを前記弁機構の開口面積を変数として演算し、前記弁機構の開口面積を前記冷凍サイクルの熱負荷情報及び前記圧縮機の回転数の少なくともいずれか1つの外部情報を変数として演算する(請求項11)。
好ましくは、前記圧縮機は外部駆動源により駆動され、前記駆動トルク演算装置は、演算した前記圧縮機の駆動トルクを前記外部駆動源の制御装置に出力する(請求項12)。
【0017】
また、冷媒が吸入される吸入圧力領域と、該吸入された冷媒を圧縮する圧縮機構と、該圧縮された冷媒が吐出される吐出圧力領域と、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量機構と、当該可変容量機構を作動させる制御圧力を蓄える制御圧力室と、前記制御圧力室の圧力を変更する容量制御弁とを具備し、外部情報を検知する外部情報検知手段により検知された外部情報に基づいて前記容量制御弁の開度を調整し、前記制御圧力室の圧力を変化させて前記可変容量機構を作動させ、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量圧縮機の容量制御システムであって、前記容量制御システムは、請求項1〜12のいずれか1項に記載の駆動トルク演算装置と、前記圧縮機の吐出容量制御の目標となる駆動トルクを設定する目標トルク設定手段とを備え、前記駆動トルク演算装置で演算された前記圧縮機の駆動トルクが、前記目標トルク設定手段で設定された目標トルクに近づくように前記容量制御弁の開度を調整することを特徴とする可変容量圧縮機の容量制御システムが提供される(請求項13)。
【発明の効果】
【0018】
本発明の請求項1の圧縮機の駆動トルク演算装置では、膨張装置を通過する冷媒の質量流量を冷凍サイクルでの冷媒循環量として駆動トルクを演算するので、圧縮機の構造に拘わらず正確に駆動トルクを演算することができる。
請求項2の圧縮機の駆動トルク演算装置では、冷媒の質量流量が正確に求められ、簡素な構成で駆動トルクの演算精度を向上させることができる。
【0019】
また、膨張装置の減圧作用を利用して冷媒循環量を演算するので、駆動トルクの演算を行う為に冷凍サイクルに新たに絞りを設ける必要がなく、冷凍サイクルの効率低下を防止することができる。更に膨張装置の入口圧力と出口圧力との差圧を用いて冷媒循環量を演算することから、差圧を十分に大きく取ることができ、特に可変容量圧縮機のように吐出流量が小さくなる場合でも差圧を検出でき、低吐出容量時の冷媒循環量の演算を可能とすることができる。
【0020】
請求項3の圧縮機の駆動トルク演算装置では、圧縮機の吐出圧力領域の圧力、吸入圧力領域の圧力及び圧縮機の回転速度を変数として含むことで、圧縮機の駆動トルクの演算精度を向上させることができる。
請求項4の圧縮機の駆動トルク演算装置では、膨張装置の入口圧力の演算精度を確保することができる。
【0021】
請求項5の圧縮機の駆動トルク演算装置では、ガス領域における高圧圧力の素早い変化に応答して冷媒循環量が演算可能となり、過渡運転時での圧縮機の駆動トルクの演算精度を向上させることができる。
請求項6の圧縮機の駆動トルク演算装置では、膨張装置の出口圧力の演算精度を確保することができる。
【0022】
請求項7の圧縮機の駆動トルク演算装置では、容量制御弁の検知部材が低圧圧力検知手段を兼ねているため、駆動トルク演算装置の簡素化を図ることができる。また、圧縮機側の吸入圧力領域の圧力変化に同期して冷媒循環量を演算可能となり、圧縮機の駆動トルクの演算精度を向上させることができる。
請求項8の圧縮機の駆動トルク演算装置では、高圧圧力検知手段と容量制御弁の感圧部材とで吸入圧力領域の圧力及び膨張装置の出口圧力を演算するため、駆動トルク演算装置の簡素化を図ることができる。また、圧縮機側の吐出圧力領域の圧力変化に同期して冷媒循環量を演算可能となり、圧縮機の駆動トルクの演算精度を向上させることができる。
【0023】
請求項9の圧縮機の駆動トルク演算装置では、膨張装置の入口圧力及び出口圧力の演算精度が向上し、圧縮機の駆動トルクの演算精度を向上させることができる。
請求項10の圧縮機の駆動トルク演算装置では、膨張装置の入口冷媒温度の演算精度が向上し、圧縮機の駆動トルクの演算精度を向上させることができる。
請求項11の圧縮機の駆動トルク演算装置では、弁機構を有する膨張装置の冷媒循環量の演算精度が向上し、圧縮機の駆動トルクの演算精度を向上させることができる。
【0024】
請求項12の圧縮機の駆動トルク演算装置では、圧縮機の駆動トルク演算精度が向上するため、外部駆動源の作動制御の安定化に寄与できる。
請求項13の圧縮機の駆動トルク演算装置では、エンジン負荷に応じて圧縮機の正確な駆動トルク制御が可能となり、エンジンとの協調制御が可能となる。
【発明を実施するための最良の形態】
【0025】
図1は、車両用エアコンシステムの冷凍サイクルの概略構成図である。
図1に示すように、車両用エアコンシステムの冷凍サイクル1は、作動流体としての冷媒(例えばR134a)が循環する循環路5を備える。循環路5には、冷媒の流動方向で順番に、圧縮機100、放熱器(凝縮器)10、膨張装置(固定オリフィス)20、蒸発器30、液体状の冷媒を貯留するアキュムレータ40が介挿されている。圧縮機100は、冷媒の吸入工程、吸入した冷媒の圧縮工程及び圧縮した冷媒の吐出工程からなる一連のプロセスを行い、循環路5に冷媒を循環させる。
【0026】
蒸発器30は、車両用空調システムの空気回路の一部をも構成している。蒸発器30を通過する空気流は、蒸発器30内の冷媒によって気化熱を奪われて冷却される。冷媒は、例えばR134aのように高圧領域で凝縮する特性を有している。
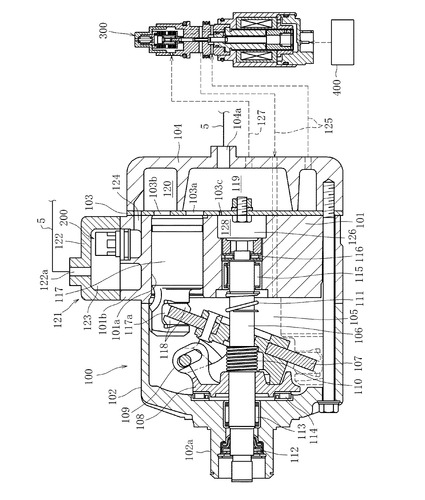
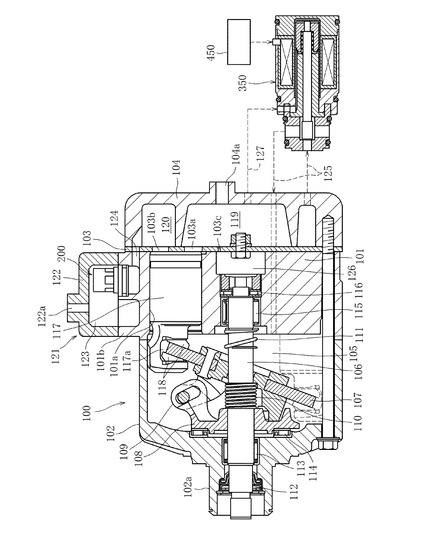
図2は、圧縮機100の構造を示す断面図である。
圧縮機100は、斜板式のクラッチレス可変容量圧縮機であり、複数のシリンダボア101aを備えたシリンダーブロック101と、シリンダーブロック101の一端に連結されたフロントハウジング102と、シリンダーブロック101の他端にバルブプレート103を介して連結されたリアハウジング104とを備えている。
【0027】
シリンダーブロック101とフロントハウジング102とによってクランク室105が規定され、クランク室105内を縦断して駆動軸106が延びている。駆動軸106は、クランク室105内に配置された環状の斜板107を貫通し、斜板107は、駆動軸106に固定されたロータ108と連結部109を介してヒンジ結合されている。従って、斜板107は、駆動軸106に沿って移動しながら傾動可能である。
【0028】
ロータ108と斜板107との間には、駆動軸106の周囲に、斜板107を最小傾角に向けて付勢するコイルばね110が装着される一方、斜板107を挟んで反対側、即ち斜板107とシリンダーブロック101との間には、駆動軸106の周囲に、斜板107を最大傾角に向けて付勢するコイルばね111が装着されている。
駆動軸106は、フロントハウジング102の外側に突出したボス部102a内を貫通して、その先端が外側まで延在している。駆動軸106とボス部102aとの間には、軸封装置112が挿入されており、フロントハウジング102の内部と外部とを遮断している。駆動軸106はラジアル方向及びスラスト方向にベアリング113,114,115,116によって回転自在に支持されている。駆動軸106は、ボス部102aから突出した先端にエンジン等の外部駆動源から駆動力が伝達されて、回転駆動される。
【0029】
シリンダボア101a内にはピストン117が配置され、ピストン117には、クランク室105内に突出したテール部が一体に形成されている。テール部に形成された凹所117a内には一対のシュー118が配置され、シュー118は斜板107の外周部に対し挟み込むように摺接している。従って、シュー118を介して、ピストン117と斜板107とは互いに連動し、駆動軸106の回転によりピストン117がシリンダボア101a内を往復動する。
【0030】
リアハウジング104には、吸入室119(吸入圧力領域)及び吐出室120(吐出圧力領域)が区画形成され、吸入室119は、バルブプレート103に設けられた吸入孔103aを介してシリンダボア101aと連通可能である。吐出室120は、バルブプレート103に設けられた吐出孔103bを介してシリンダボア101aと連通している。なお、吸入孔103a及び吐出孔103bは、図示しない吸入弁及び吐出弁によってそれぞれ開閉される。
【0031】
シリンダーブロック101の外側にはマフラ121が設けられている。マフラを構成をするマフラケーシング122は、シリンダーブロック101に一体に形成されたマフラベース101bに図示しないシール部材を介して接合されている。マフラケーシング122及びマフラベース101bはマフラ空間123を規定し、マフラ空間123は、リアハウジング104、バルブプレート103及びマフラベース101bを貫通する吐出通路124を介して吐出室120と連通している。
【0032】
マフラケーシング122には吐出ポート122aが形成され、マフラ空間123には、吐出通路124と吐出ポート122aとの間を遮るように逆止弁200が配置されている。具体的には、逆止弁200は、吐出通路124側の圧力とマフラ空間123側の圧力との圧力差に応じて開閉し、この圧力差が所定値より小さい場合閉作動し、圧力差が所定値より大きい場合は開作動する。
【0033】
吐出室120は、吐出通路124、マフラ空間123及び吐出ポート122aを介して循環路5の往路部分と連通可能であり、この連通は逆止弁200によって断続される。一方、吸入室119は、リアハウジング104に設けられた吸入ポート104aを介して循環路5の復路部分と連通している。
リアハウジング104には、容量制御弁(電磁制御弁)300が接続されており、容量制御弁300は、吐出室120とクランク室105とを連通する給気通路125に介装されている。給気通路125の一部は、吐出室120とクランク室105との間を連通するようにリアハウジング104からバルブプレート103を経てシリンダーブロック101にまで亘っている。
【0034】
一方、吸入室119は、クランク室105と抽気通路126を介して連通している。抽気通路126は、駆動軸106とベアリング115,116との隙間、空間128及びバルブプレート103に形成された固定オリフィス103cからなる。
また、容量制御弁300は、感圧通路127を通じて、給気通路125とは独立して吸入室119に接続されている。容量制御弁300は、クランク室105への吐出ガス導入量を調整してクランク室105内の圧力を変化させることで、圧縮機100の吐出容量を変化させる機能を有する。容量制御弁300には、圧縮機100の外部に設けられたエアコンECU400が接続され、エアコンECU400から供給される制御電流Iに基づいて作動制御される。
【0035】
図3は、本発明の第1実施形態に係る容量制御弁300の構造を示す断面図である。
図3に示すように、容量制御弁300は、弁ユニットと弁ユニットを開閉作動させる駆動ユニットとからなる。弁ユニットは、円筒状の弁ケーシング301を有し、内部に感圧室302、弁室306が軸方向に並んで形成されている。弁ケーシング301の外周面には、通孔301a、通孔301c及び通孔301dが形成されている。感圧室302は通孔301a及び感圧通路127を介して吸入室119と連通している。弁室306は、通孔301c及び給気通路125の上流側部分を介して吐出室120と連通している。通孔301dは、給気通路125の下流側部分を介してクランク室105と連通している。弁室306と通孔301dとは弁ケーシング301の中央で軸方向に延びる弁孔301bにより連通可能となっている。
【0036】
感圧室302内には、ベローズ303が配設されている。ベローズ303は、内部を真空にしてバネが内蔵され、弁ケーシング301の軸方向に変位可能に配置されており、感圧室302内、即ち吸入室119内の圧力である吸入圧力Psを受圧する機能を有する。
弁ケーシング301には、感圧ロッド304が軸方向に摺動可能に支持されている。感圧ロッド304は、一端がベローズ303に当接している一方、他端には円柱状の弁体304aが一体成形されている。弁体304aは、ベローズ303の伸縮に応じて移動し弁孔301bを開閉する機能を有する。
【0037】
ベローズ303は、感圧ロッド304とは反対側の端部がベローズガイド313により支持されている。ベローズガイド313は、圧力設定部材314に摺動可能に支持されている。圧力設定部材314は、一端が閉塞された筒状に形成されており、弁ケーシング301に軸方向に圧入固定されている。圧力設定部材314とベローズガイド313との間には、ベローズ303を感圧ロッド304に向かって(開弁方向に)押圧する強制解放バネ315が配設されている。
【0038】
駆動ユニットは円筒状のソレノイドケーシング310を有し、ソレノイドケーシング310は弁ケーシング301の他端に同軸的に連結されている。ソレノイドケーシング310内には、筒状のソレノイド312が収容されている。またソレノイドケーシング310内には、同心上に円筒状の固定コア305が収容かつ固定され、固定コア305は、弁ケーシング301からソレノイド312の内部をその中央まで延びている。固定コア305は、弁ケーシング301と反対側の端部が、一端が閉塞した筒状のスリーブ311によって囲まれて閉塞している。スリーブ311と固定コア305との間には、軸方向に所定の隙間を有して可動コア307が収納されている。
【0039】
固定コア305の弁ユニット側の端部には、中央を貫通する孔の一部として支持孔305aが形成され、支持孔305aには弁体304aの一端が摺動可能に挿入され弁体304aを支持する。
固定コア305にはソレノイドロッド308が挿入されており、ソレノイドロッド308の一端は弁体304aに固定され、他端は固定コア305から突出して可動コア307に固定されている。可動コア307とスリーブ311との間には、可動コア307を固定コア305側に向かって(閉弁方向に)押圧するばね309が設けられている。
【0040】
可動コア307、固定コア305及びソレノイドケーシング310は磁性材料で形成され、磁気回路を構成する。スリーブ311は非磁性材料のステンレス系材料で形成されている。
スリーブ311の内部の空間は、通孔301eを介して感圧室302と連通している。したがって、弁体304aの他端側の面には吸入圧力Psによる力が作用する。
【0041】
弁孔301bの断面積と支持孔305aに支持される弁体304aの断面積が略同等に設定されている。したがって、弁体304aには、開方向及び閉方向に吐出圧力Pdによる力が作用しない。また、感圧ロッド304の断面積も弁孔301bの断面積と略同等に設定されており、弁体304aには開方向及び閉方向に夫々通孔301d内の圧力、即ちクランク室105内の圧力であるクランク圧力Pcによる力が作用して、これらを互いに打ち消し合っている。
【0042】
したがって容量制御弁300の吸入圧力制御特性は、実質的に吐出圧力Pd及びクランク圧力Pcの影響を受けず、ソレノイド312の通電量(制御電流)Iに基づいて制御対象となる吸入圧力Psを一義的に決定できる。図4は、ソレノイド312の通電量(制御電流)と吸入圧力Psとの関係を示すグラフである。
詳しくは、容量制御弁300の弁体304aに作用する力は、ソレノイド312による電磁力F(I)の他に、ばね309による付勢力fs1、ベローズ303による付勢力fs2(ベローズ303内のばね及び強制開放バネ315による付勢力)、吸入圧力Psによる付勢力であって、その関係は、ベローズ303の有効受圧面積をSbとすると、式(4)で表される。そして、この式(4)を、吸入圧力Psを求める式に変形すると、式(5)となる。
【0043】
【数4】
【0044】
ここでSbは定数であり、ばね309による付勢力fs1及びベローズ303による付勢力fs2は変位に基づいて決定されるので、式(5)からソレノイドの制御電流Iに基づいて制御対象となる吸入圧力Psが一義的に決定されることが判明される。
次に、圧縮機100の動作について説明する。
車両エンジン作動状態でエアコン非作動時には、エアコンECU400は容量制御弁300のソレノイド312へ電流を供給せず、強制開放バネ315の付勢力により弁体304aが強制開放されて圧縮機100の吐出容量は最小となる。このとき、逆止弁200が閉じるようにその内部のばねの付勢力が設定されており、その結果凝縮器10側への冷媒循環は遮断される。最小の吐出容量で吐出室120に吐出された冷媒は容量制御弁300を含む吐出室120とクランク室105との連通路125を経てクランク室105に流入し、さらにクランク室105から、ベアリング115、116と駆動軸106との隙間を抜け、固定オリフィス103cを介して吸入室119に戻る内部循環回路を循環している。
【0045】
エアコンを作動開始すると、容量制御弁300のソレノイド312へ所定の電流が流れ、吐出室120とクランク室105との連通路125が遮断されるため、クランク圧力Pcが低下して吸入圧力Psと同等となり、斜板107の傾角が増大して、ピストンストロークが増大する。これにより、吐出室120の圧力が高まり、逆止弁200の前後差圧が所定値を超えると逆止弁200が開弁して圧縮冷媒が凝縮器10側に流れる。そして、圧縮機100の作動時には、エアコンECU400は、容量制御弁300のソレノイド312へ所定の電流を通電し、図4に示す所定の吸入圧力を維持するように圧縮機100の吐出容量が制御される。
【0046】
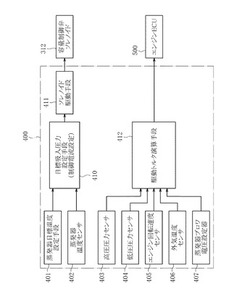
図5はエアコンECU400における本発明の特徴部分の構成を示したブロック図である。
エアコンECU400は、目標吸入圧力設定手段410、ソレノイド駆動手段411、エンジンの駆動トルク演算手段412及び各種センサ、設定手段から構成されている。
上記各種センサとしては、蒸発器温度センサ402、高圧圧力センサ403、低圧圧力センサ404、エンジン回転速度センサ405、外気温度センサ406が用いられる。蒸発器温度センサ402は、通風経路の蒸発器30出口に設置され、蒸発器出口空気温度Teを検知する。高圧圧力センサ403は、凝縮器10の入口側に設置され、圧縮機100の吐出室120から膨張装置20の入口までの高圧領域における冷媒圧力である高圧圧力PHを検知する。低圧圧力センサ404は、アキュムレータ40の入口側に設置され、圧縮機100の吸入室119から膨張装置20の出口までの低圧領域における冷媒圧力である低圧圧力PLを検知する。エンジン回転速度センサ405は、エンジン回転速度を検出するものであって、所定のプーリ比を掛けて圧縮機100の駆動速度の情報として使用する。エンジン回転速度センサ405からのエンジン回転速度情報は、エンジンECU500を経由して入力される。外気温度センサ406は、例えば通風経路の蒸発機30入口に設置され、外気温度Taを検知する。
【0047】
エアコンECU400には、上記設定手段として、蒸発器目標温度設定手段401及び蒸発器ブロワ電圧設定器407が用いられている。蒸発器目標温度設定手段401は、図示しない温度設定器から入力した車室内設定温度と外部情報に基づいて、圧縮機100の吐出容量制御の最終目標値となる蒸発器出口での空気の目標温度Tesを設定する。蒸発器ブロワ電圧設定器407は蒸発器30の送風量を決定するブロワ電圧VLを設定する。
【0048】
目標吸入圧力設定手段410は、蒸発器目標温度設定手段401で設定された目標温度Tesと、蒸発器温度センサ402で検知された実際の蒸発器出口空気温度Teとの偏差を演算し、この偏差を縮小するように圧縮機100の目標吸入圧力Pss、即ち吐出容量制御信号としての容量制御弁300への制御電流Iを設定する。
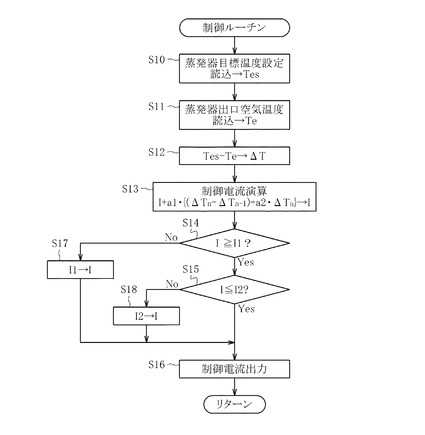
目標吸入圧力設定手段410における制御電流Iの設定要領を図6を用いて詳述する。図6は、制御電流Iの設定制御手順を示すフローチャートである。
【0049】
先ずステップ10では、蒸発器目標温度設定手段401で設定された目標温度Tesを読み込む。そして、ステップS11に進む。
ステップS11では、蒸発器温度センサ402で検知された蒸発器出口空気温度Teを読み込む。そして、ステップS12に進む。
ステップS12では、ステップ10で読み込んだ目標温度TesとステップS11で読み込んだ蒸発器出口空気温度Teとの差ΔTを求める。そして、S13に進む。
【0050】
ステップS13では、制御電流Iを演算する。詳しくは、制御電流I(In)は式(6)により求められる。なお、a1、a2は定数であり、適宜設定される。
In=In−1+a1・((ΔTn−ΔTn−1)+a2・ΔTn)・・・(6)
そして、ステップS14に進む。
ステップS14では、制御電流Iが所定値I1以上であるか否かを判別する。所定値I1以上である場合は、ステップS15に進む。
【0051】
ステップS15では、制御電流Iが所定値I2以下であるか否かを判別する。所定値I2以下である場合は、ステップS16に進む。
ステップS16では、制御電流Iをソレノイド駆動手段411に出力する。そして本ルーチンをリターンする。
一方、ステップS14において制御電流Iが所定値I1未満であると判定した場合は、ステップS17に進む。
【0052】
ステップS17では、所定値I1を制御電流Iとして書き換える。そしてステップS16に進む。
ステップS15において制御電流Iが所定値I2より大きいと判定した場合、ステップS18に進む。
ステップS18では、所定値I2を制御電流Iとして書き換える。そしてステップS16に進む。
【0053】
以上のように、目標吸入圧力設定手段410では、目標温度Tesと実際の温度である蒸発器出口空気温度Teとの差が縮小するようにPI制御により制御電流Iを制御する。制御電流Iは予め定められた範囲内(I1≦I≦I2)で設定される。
ソレノイド駆動手段411は、目標吸入圧力設定手段410で設定された制御電流Iに基づいて容量制御弁300のソレノイド312を駆動する。制御電流Iは所定の駆動周波数(例えば400〜500Hz)のPWM(パルス幅変調)により、デューティ比を変更することにより調整される。
【0054】
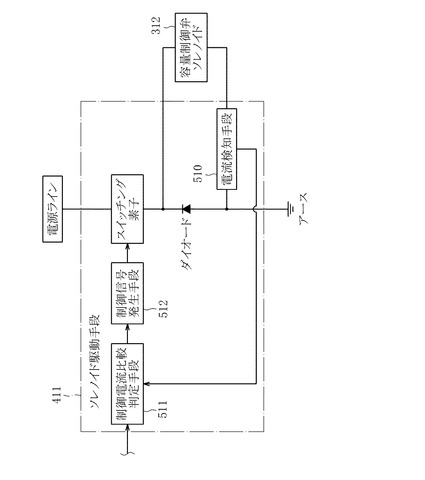
図7は、ソレノイド駆動手段411の詳細構成図である。
ソレノイド駆動手段411は、図7に示すように、電流検知手段510、制御電流比較判定手段511、制御信号発生手段512、スイッチング素子及びダイオードにより構成されている。電流検知手段510は、容量制御弁300のソレノイド312に実際に流れている実電流を検出する。制御電流比較判定手段511は、目標吸入圧力設定手段410から入力した制御電流Iと電流検知手段510により検出した実電流とを比較する。制御信号発生手段512は、制御電流比較判定手段511により比較された結果に基づいて、スイッチング素子を制御する制御信号を発生する。スイッチング素子は、制御信号発生手段512からの制御信号に基づいて、電源ラインからソレノイド312に供給される電流を制御する。即ち、ソレノイド駆動手段411は、ソレノイド312に供給される電流が目標吸入圧力設定手段410で設定された制御電流Iとなるようにフィードバック制御する。
【0055】
以上からエアコンECU400の空調制御は、蒸発器目標温度設定手段401で設定された目標温度Tesに、蒸発器温度センサ402で検知された蒸発器出口空気温度Teが近づくように目標吸入圧力Pss、延いては制御電流Iを設定し、結果として圧縮機100の吐出容量を制御するものである。
エアコンECU400の駆動トルク演算手段412は、高圧圧力センサ403、低圧圧力センサ404、エンジン回転速度センサ405の各センサで検知された外部情報に基づいて圧縮機100の駆動トルクTrを演算し、エンジンECU500に出力する。エンジンECU500は圧縮機100の駆動トルク情報を参照してエンジンを最適な運転状態に制御する。
【0056】
駆動トルク演算手段412において、圧縮機100の駆動トルクTrは以下の式(7)により求められる。
【0057】
【数5】
【0058】
ここで、Ncは圧縮機100の回転速度、ηmは機械効率、nはポリトロープ指数、Grは冷媒質量流量、Psは吸入圧力、Vsは吸入冷媒比体積、Pdは吐出圧力、ηvは体積効率である。
上記式(7)では、冷媒質量流量Grを圧縮機100のピストン押しのけ量から算出するのではなく、膨張装置20を通過する冷媒質量流量として計算することを特徴としている。このように、質量流量から計算すれば、圧力変動に拘わらず、冷凍サイクルの如何なる位置で測定した情報をもとに演算可能である。したがって、各種圧縮機に広く採用することができる。
【0059】
膨張装置20を通過する冷媒質量流量Grは、以下の式(8)により求められる。
【0060】
【数6】
【0061】
ρは膨張装置20の入口での冷媒密度、Pexp1は膨張装置20の入口圧力、Pexp2は膨張装置20の出口圧力、Kは係数であり、膨張装置20の流量係数Cと開口面積Aを含んでいる(K∝C・A)。
ここで、高圧圧力センサ403で検知された圧力をPHとすれば、膨張装置20の入口圧力Pexp1は、凝縮器10及び凝縮器10から膨張装置20に至る配管での損失を考慮して、Pexp1=f1(PH)で演算される。また、低圧圧力センサ405で検知された圧力をPLとすれば、膨張装置20の出口圧力Pexp2は、蒸発器30及び凝縮器30から膨張装置20に至る配管での損失を考慮して、Pexp2=f2(PL)で演算される。
【0062】
さらに、膨張装置20の入口での冷媒密度ρは、膨張装置20の入口における冷媒の飽和温度Texp1を変数として演算可能であるが、飽和温度Texp1は膨張装置20の入口圧力Pexp1で演算できるため、結局ρ=f3(Pexp1)=f3(f1(PH))で演算され、膨張装置20の入口の冷媒密度ρは高圧圧力センサ403で検知された高圧圧力PHから演算される。
【0063】
したがって膨張装置20を通過する冷媒質量流量Grは、高圧圧力センサ403で検知された高圧圧力PH、低圧圧力センサ404で検知された低圧圧力PLによって演算可能となる。
さらに、吐出圧力Pdは、吐出室120と高圧圧力センサ403が設置されている間の圧力損失を考慮して、Pd=f4(PH)で演算される。また吸入圧力Psは、吸入室119と低圧圧力センサ404が設置されている間の圧力損失を考慮して、Ps=f6(PL)で演算される。
【0064】
なお、これらの圧力損失は、例えば熱負荷情報として外気温度センサ406で検知される外気温度Ta及び蒸発器ブロワ電圧設定器407で設定されるブロワ電圧VLと、圧縮機回転速度Ncを変数として補正すればよく、Ta、VL、Ncが増大したときに圧力損失が増加するように補正すればよい。即ち、Pexp1、Pd、Pexp2、Psは次式(9)〜(12)で演算される。
Pexp1=f1(PH)=f1(PH、Ta、VL、Nc)・・・(9)
Pd=f4(PH、Ta、VL、Nc)・・・(10)
Pexp2=f2(PL)=f2(PL、Ta、VL、Nc)・・・(11)
Ps=f5(PL)=f5(PL、Ta、VL、Nc)・・・(12)
また、圧縮機回転速度Ncは、エンジン回転速度センサ405で検知されたエンジン回転速度Neに所定のプーリ比Rを掛けて、Nc=R・Neで演算される。なお、機械効率ηm
はあらかじめ定められた係数である。また吸入室119内の冷媒の比体積Vsは吸入圧力PsからVs=f6(Ps)で演算される。
【0065】
以上から、圧縮機100の駆動トルクは、高圧圧力センサ403、低圧圧力センサ404、エンジン回転速度センサ405、外気温度センサ406、蒸発器ブロワ電圧設定器407の各センサの出力信号により演算可能となり、これをエンジンECU500に出力することにより、適正なエンジン回転速度に制御され、特にアイドリング時のエンジン回転速度制御の安定化に寄与できる。
【0066】
図8は、本発明の第2実施形態のエアコンECU420の構成を示したブロック図である。
本発明の第2実施形態は、上述した第1実施形態のエアコンECU400をエアコンECU420に置き換えたものである。以下、第1実施形態と異なる点を説明する。
エアコンECU420は、エアコンECU400から低圧圧力センサ404を削除し、低圧圧力センサ404により検知される低圧圧力PLの代用として、目標吸入圧力設定手段410で設定された目標吸入圧力Pssを駆動トルク演算手段421に入力し、駆動トルクTrを演算する。
【0067】
圧縮機100は吸入圧力領域の圧力を制御するものであり、吸入圧力Psは図4に示すようにソレノイド312の制御電流Iから一義的に決定され、式(5)から演算される。そして、膨張装置20の出口圧力Pexp2は、吸入室119から蒸発器30を挟んで膨張装置20の出口領域に至る圧力損失を考慮して演算すれば、低圧圧力センサ404は削除可能となる。
【0068】
したがって、第2実施形態では、駆動トルク演算手段421において、第1実施形態におけるPexp2=f2(PL)の代わりにPexp2=f7(Ps)とし、Ps=f6(PL)の代わりに式(5)を用いて、式(7)及び式(8)により駆動トルクTrが演算される。
第2実施形態では、吐出圧力Pdと吸入圧力Psとから冷媒質量流量Grを演算するため、圧縮機100側の圧力変化に同期して膨脹装置の冷媒質量流量を演算可能となり、圧縮機100の駆動トルクの演算精度向上に寄与する。
【0069】
次に図9〜図14を用いて本願の第3実施形態について説明する。
図9は第3実施形態での圧縮機100の構造を示す断面図である。図9に示すように、第3実施形態は、第1実施形態に対して圧縮機100の本体の構成は同一であるものの、これに付属する容量制御弁350と容量制御弁を作動制御するエアコンECUが異なっている。
【0070】
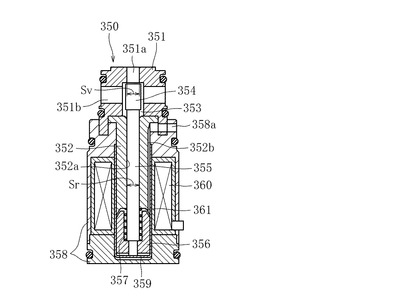
図10は第3実施形態での容量制御弁350の構造を示す断面図である。
図10に示すように、容量制御弁350はベローズのない容量制御弁であり、円筒状の弁ケーシング351の内部には弁室353が形成されている。弁ケーシング351の外周面には連通孔351bが形成されているとともに、弁ケーシング351の先端中央部には軸方向に延びる弁孔351aが形成されている。弁室353は、弁孔351a及び給気通路125の上流側部分を介して吐出室120と連通しているとともに、連通孔351b及び給気通路125の下流側部分を介してクランク室105と連通している。
【0071】
弁室353内に収納された弁体354は、その一端で弁孔351aを開閉する機能を有する。弁体354の他端は、固定コア352に軸方向に摺動可能に挿入されたソレノイドロッド355の一端に固定されている。ソレノイドロッド355の他端に固定された可動コア356と固定コア352との間には開放バネ357が設けられており、開放バネ357は可動コア356を固定コア352から遠ざかる方向(開弁方向)に付勢させる。
【0072】
ソレノイドハウジング358の外周面には、連通孔358aが形成されている。ソレノイドハウジング358と固定コア352との間には連通溝352bが形成されており、連通溝352bは、固定コア352及び可動コア356を覆うスリーブ359の内部の可動コア収納部分である空間361と連通孔358aとを連通する。連通孔358aは、感圧通路127を介して吸入室119と連通しており、ソレノイドロッド355には吸入圧力Psが作用する。したがって、弁体354の一端側(第1受圧面)には吐出圧力Pdが作用する一方、他端側(第2受圧面)にはソレノイドロッド355を介して吸入圧力Psが作用し、弁体354とソレノイドロッド355との一体構成物が感圧部材として機能する。弁体354が弁孔351aを閉じたときの弁体354の受圧面積(シール面積)Svと、挿通孔352aに支持されたソレノイドロッド355の断面積Srとが同等に設定されており、したがって、弁体354に作用する力は、開放バネ357による付勢力をfsとすると、以下の式(13)の関係が成り立つ。そして、式(13)を変形してPsについて求めると、式(14)となる。
【0073】
【数7】
【0074】
したがって、吐出圧力Pdと電磁力F(I)が決定されれば吸入圧力Psが決定することが判明する。
つまり、制御対象としての目標吸入圧力Pssを予め設定し、変動する吐出圧力Pdの情報が判れば、電磁力F(I)延いては電流Iを演算できる。そして、ソレノイド360への通電量をこの演算値Iに基づいて調整すれば、目標吸入圧力Pssを維持するように弁体354が動作してクランク圧力Pcを調整し、圧縮機100の吐出容量制御が可能となる。
【0075】
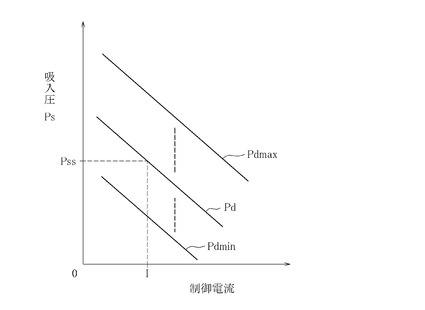
図11は、制御電流と吸入圧力Psとの関係を示すグラフである。図11に示すように、吐出圧力Pdの状況に応じて吸入圧力制御範囲をスライドできることが容量制御弁350の特徴であり、これにより熱負荷の高い領域でも吐出容量制御が可能となる。また、式(14)からシール面積Svを小さく設定すれば小さな電磁力でも吸入圧力制御範囲を拡大できることが判明され、これらの相乗効果により第1実施形態の容量制御弁300に対して吸入圧力制御範囲を大幅に拡大できる。つまり本実施形態では、吸入圧力Psを制御対象としても、熱負荷の高い領域で圧縮機100の起動直後から吐出容量制御を可能とするものである。なお、ソレノイド360への通電量を0とすると、開放バネ357の付勢力により弁体354は弁孔351aを強制開放する。これにより、吐出室120から冷媒がクランク室105に導入され、圧縮機100の吐出容量は最小となる。
【0076】
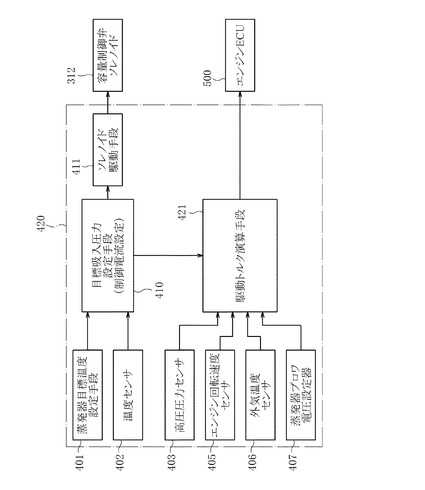
図12は、エアコンECU450の構成図である。
エアコンECU450は、第2実施形態のエアコンECU420に対し、目標吸入圧力設定手段及び駆動トルク演算手段が異なり、更に制御信号演算手段452が追加されている。
目標吸入圧力設定手段451は、蒸発器目標温度設定手段401で設定された目標温度Tesと、蒸発器温度センサ402で検知された実際の温度である蒸発器出口空気温度Teとの偏差を演算し、この偏差を縮小するように目標吸入圧力Pssを設定する。
【0077】
制御信号演算手段452は、目標吸入圧力設定手段451で設定された目標吸入圧力Pssと吐出圧力Pdとから式(14)により、ソレノイド360への通電量Iを演算する。ここで、吐出圧力Pdは、吐出室120と高圧圧力センサ403が設置されている間の圧力損失を考慮して、Pd=f4(PH)で演算される。
駆動トルク演算手段453は、高圧圧力センサ403で検知された高圧圧力PH、エンジン回転速度センサ405で検知されたエンジン回転速度Ne、制御信号演算手段で演算された制御電流Iとから圧縮機100の駆動トルクTrを演算する。
【0078】
駆動トルクTrの演算は、第1実施形態及び第2実施形態と同様に、式(7)及び式(8)から求められる。ここで、またPd=f4(PH)であるので、吸入圧力Psは制御電流Iと高圧圧力PHとの関数となる。また、膨脹装置20の出口に至る圧力損失を考慮して、膨張装置20の出口圧力Pexp2は、Pexp2=f7(Ps)により演算可能となり、低圧圧力センサ404が不要となる。
【0079】
また、式(14)を変形すると、式(15)となる。
【0080】
【数8】
【0081】
したがって、Pd−Psが制御電流Iの関数となる。膨脹装置20の入口出口の圧力差Pexp1−Pexp2は、Pd−Psから圧力損失を考慮して演算可能であることから、Pexp1−Pexp2=f8(I)として、制御電流Iから直接演算してもよい。
図13は、エンジンECU450での制御電流Iの設定手順を示すフローチャートである。
【0082】
先ずステップ100では、フラッグF1=0に設定する。そして、ステップS101に進む。
ステップS101では、熱負荷情報に基づく圧力損失補正後の吐出圧力Pd(=f4(PH、Ta、VL、Nc))を読み込む。そして、ステップS102に進む。
ステップS102では、フラッグF1=0であるか否かを判別する。F1=0である場合は、ステップS103に進む。
【0083】
ステップS103では、タイマーを0からスタートさせる。そして、ステップS104に進む。
ステップS104では、フラッグF1=0に設定する。そして、ステップS105に進む。
ステップS105では、制御対象となる目標吸入圧力Pssを設定する。そして、ステップS106に進む。
【0084】
ステップS106では、制御電流Iを演算する。詳しくは、詳しくは、制御電流Iは次式(16)により求められる。なお、式(16)は、式(14)において、電磁力F(I)を電流の1次関数とおいて変形したものである(b1、b2は定数)。
I=b1・(Pd−Pss)+b2・・・(16)
そして、ステップS107に進む。
【0085】
ステップS107では、制御電流Iが所定値I3以上であるか否かを判別する。所定値I3以上である場合は、ステップS110に進む。
ステップS110では、制御電流Iが所定値I4以下であるか否かを判別する。所定値I4以下である場合は、ステップS109に進む。
ステップS109では、制御電流Iを出力する。そしてステップS101に戻る。
【0086】
一方、ステップS107において制御電流Iが所定値I3未満であると判定した場合は、ステップS108に進む。
ステップS108では、所定値I3をIとして設定する。そして、ステップS109に進む。
ステップS110において制御電流Iが所定値I4より大きいと判定した場合は、ステップS111に進む。
【0087】
ステップS111では、所定値I4をIとして設定する。そしてステップS109に進む。
ステップS102において、フラッグF1=0でない(F1=1である)と判定した場合は、ステップS112に進む。
ステップS112では、タイマー値tが所定値t1以下であるか否かを判別する。タイマー値tが所定値t1以下である場合は、ステップS106に進む。タイマー値tが所定値t1より大きい場合はステップS113に進む。
【0088】
ステップS113では、タイマーをリセットし、t=0に設定する。そして、ステップS114に進む。
ステップS114では、フラッグF1=0に設定する。そして、ステップS106に進む。
以上の制御により、所定の目標吸入圧力Pssを維持するように常時吐出圧力Pdを読み込み、変動する吐出圧力Pdに応じて制御電流Iを、I3からI4の範囲内で調整するものである。目標吸入圧力Pssは所定時間t1毎に更新される。
【0089】
図14は、図13でのステップS105における目標吸入圧力Pssの設定手順を示すフローチャートである。
ステップS105の目標吸入圧力Pssの設定サブルーチンが実行されると、まず、ステップS200として、蒸発器目標温度設定手段401で設定された蒸発器出口空気温度の目標値Tesを読み込む。そして、ステップS201に進む。
【0090】
ステップS201では、蒸発器温度センサ402により検出した蒸発器出口空気温度Teを読み込む。そして、ステップS202に進む。
ステップS202では、ステップS200で読み込んだ蒸発器出口空気温度の目標値TesとステップS201で読み込んだ蒸発器出口空気温度との偏差ΔT(=Tes−Te)を演算する。そして、ステップS203に進む。
【0091】
ステップS203では、目標吸入圧力Pssを演算する。詳しくは、目標吸入圧力Pssは式(17)により求められる。なお、式(17)におけるc1、c2は定数であり、あらかじめ適宜設定される。
Pssn=Pssn−1+c1・[(ΔTn−ΔTn−1)+c2・ΔTn]・・・(17)
そして、ステップ204に進む
ステップS204では、ステップS203で演算された目標吸入圧力Pssが所定値Ps1以上であるか否かを判別する。所定値Ps1以上である場合は、ステップS206に進む。
【0092】
ステップS206では、ステップS203で演算された目標吸入圧力Pssが所定値Ps2以下であるか否かを判別する。所定値Ps2以下である場合は、本ルーチンを終了して、メインルーチンへ戻る。
一方、ステップS204において目標吸入圧力Pssが所定値Ps1未満であると判定した場合は、ステップS205に進む。
【0093】
ステップS205では、所定値Ps1を目標吸入圧力Pssとして書き換える。そして本ルーチンを終了して、メインルーチンへ戻る。
ステップS206において目標吸入圧力Pssが所定値Ps2より大きいと判定した場合、ステップS207に進む。
ステップS207では、所定値Ps2を目標吸入圧力Pssとして書き換える。そして本ルーチンを終了して、メインルーチンへ戻る。
【0094】
以上のように、目標吸入圧力設定手段451では、蒸発器目標温度設定手段で設定された目標温度Tesと蒸発器温度センサ402で検知された温度Teとの差に基づいて目標吸入圧力Pssを設定し、蒸発器出口空気温度Teが目標温度Tesに近づくように目標吸入圧力Pssを演算して、吐出容量を制御するものである。目標吸入圧力Pssは予め定められた範囲内(Ps1≦Pss≦Ps2)で設定される。なお、目標温度Tesは車室内の空調状態に応じて変更される。
【0095】
第3実施形態では、第2実施形態と同様に、吐出圧力Pdと吸入圧力Psから冷媒循環量を演算するため、圧縮機100側の圧力変化に同期して冷媒循環量が演算可能となり、圧縮機100の駆動トルクの演算精度向上に寄与する。
図15は、本発明の第4実施形態のエアコンECU480の構成を示したブロック図である。
【0096】
本発明の第4実施形態のエアコンECU480は、上述した第2実施形態のエアコンECU420をベースとし、目標吸入圧力設定手段481において、空調制御を実行する第1制御モードと、トルク制御を実行する第2制御モードを備えていることを特徴とする。
本実施形態の圧縮機100は、第1実施形態の圧縮機100と同一の構成である。容量制御弁300は、第1実施形態の容量制御弁300と同一の構造ではあるが、吸入圧力Pdを受圧するベローズ303の有効面積Sbを容量制御弁300のものより大幅に小さく設定している。
【0097】
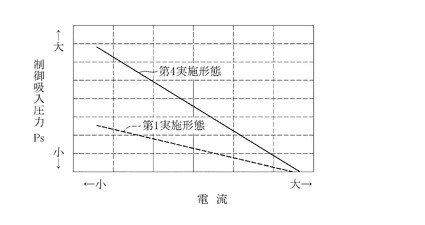
図16は、第4実施形態の容量制御弁300でのソレノイドの通電量と吸入圧力との関係を示すグラフである。
図16に示すように、第4実施形態では、吸入圧力制御範囲が大幅に拡大される。したがって、殆どの運転条件で吐出容量制御が可能となる。
第4実施形態の目標吸入圧力設定手段481は、蒸発器目標温度設定手段で設定された目標温度Tesと蒸発器温度センサ402で検知された温度Teとの偏差を演算し、この偏差が縮小するように目標吸入圧力Pssを演算して制御電流Iを制御する第1制御(空調制御)モードを有する。第1制御モードの制御フローは、上述した図6に示す制御フローと同一である。
【0098】
さらに、目標吸入圧力設定手段481は、エンジンECU500から指令される目標トルクTrsと、トルク演算手段421で演算された駆動トルクTrとの偏差を演算し、この偏差を縮小するように目標吸入圧力つまり制御電流Iを設定する第2制御(トルク制御)モードを有する。制御電流Iは、予め定められた範囲内(I1≦I≦I2)で設定される。
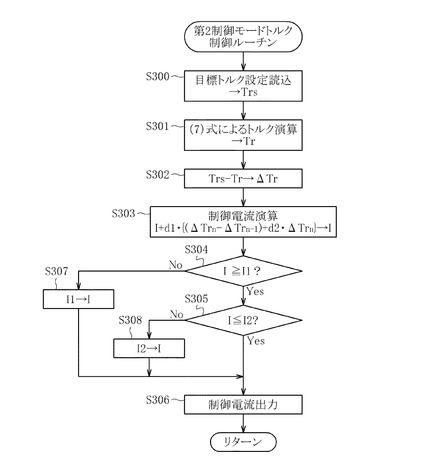
図17は、第2制御モードでの制御手順を示すフローチャートである。
【0099】
図17に示すように、第2制御モードが実行開始すると、ステップS300では、目標トルク設定手段406で設定された目標トルクTrsを読み込む。そして、ステップS301に進む。
ステップS301では、前述の式(7)により駆動トルクTrを演算する。そして、ステップS302に進む。
【0100】
ステップS302では、ステップ301で読み込んだ目標トルクTrsとステップS302で読み込んだ駆動トルクTrとの差ΔTrを求める。そして、ステップS303に進む。 ステップS303では、制御電流Iを演算する。詳しくは、制御電流I(In)は式(18)により求められる。なお、式(18)において、d1、d2は定数であり、適宜設定される。
In=In−1+d1・[(ΔTrn−ΔTrn−1)+d2・ΔTrn]・・・(18)
そして、ステップS304に進む。
【0101】
ステップS304では、ステップS303で求められた制御電流Iが所定値I1以上であるか否かを判別する。所定値I1以上である場合は、ステップS305に進む。
ステップS305では、制御電流Iが所定値I2以下であるか否かを判別する。所定値I2以下である場合は、ステップS306に進む。
ステップS306では、制御電流Iをソレノイド駆動手段411に出力する。そして本ルーチンを終了してメインルーチンに戻る。
【0102】
一方、ステップS304において制御電流Iが所定値I1未満であると判定した場合は、ステップS307に進む。
ステップS307では、所定値I1を制御電流Iとして書き換える。そしてステップS306に進む。
ステップS305において制御電流Iが所定値I2より大きいと判定した場合、ステップS308に進む。
【0103】
ステップS308では、所定値I2を制御電流Iとして書き換える。そしてステップS306に進む。
以上のように、目標トルクTrsと駆動トルクTrとの差が縮小するようにPI制御により制御電流Iを演算する。制御電流Iは予め定められた上下限の範囲(I1≦I≦I2)で設定される。
【0104】
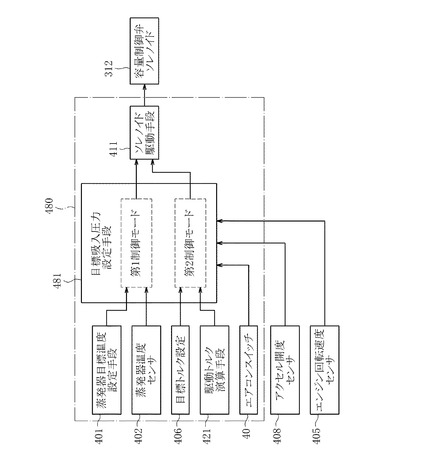
目標吸入圧力設定手段481には、例えばエアコンスイッチ409のON/OFF設定、車両の加速情報(例えばアクセル開度センサ408から入力したアクセル開度、スロットル開度等)、エンジン回転速度情報が入力され、図18に示すように、これらの情報が所定の条件を満たすときに、第2制御モード(トルク制御)を選択し、それ以外のときは第1制御モード(空調制御)を選択する。
【0105】
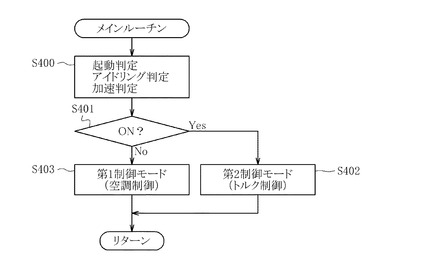
図18は、目標吸入圧力設定手段481でのモード切替制御手順を示すフローチャートである。
本ルーチンでは、ステップS400において、上記起動判定、加速判定及びアイドリング判定を実行する。詳しくは、以下の条件1)〜3)を満たすか否かを判定する。
1)エアコンスイッチ409がOFFからONに切り換えられたか(起動判定)。
2)車両が加速状態であるか、例えばアクセル開度が所定値以上か(加速判定)。
3)車両がアイドリング状態であるか、例えば、アクセル開度ゼロでエンジン回転速度が所定値以下か(アイドリング判定)。そして、ステップS401に進む。
【0106】
ステップS401では、ステップS400における起動判定、加速判定及びアイドリング判定の条件をいずれか1つでも満たしていた(ONである)場合は、ステップS402に進む。
ステップS402では、第2制御モードを実行する。そして、本ルーチンをリターンする。
【0107】
一方、ステップS401において、ステップS400における各条件がいずれも満たされていない場合は、ステップS403に進む。
ステップS403では、第1制御モードを実行する。そして、本ルーチンをリターンする。
以上により、第4実施形態によれば、圧縮機100の駆動トルクが所定値になるように、吐出容量制御ができるため、エンジン負荷の状況に応じて圧縮機100のトルクを調整でき、エンジンとの協調制御が可能となる。なお、トルク制御は第4実施形態に限定されず、図9〜図14に示す第3実施形態をベースとしても実行可能であり、その他の外部信号により吐出容量制御が可能な可変容量圧縮機でも実行できる。
【0108】
また、本実施形態では目標トルクTrsはエンジンECU500から指令されるとしたが、例えばエンジンECU側の負荷情報をエアコンECU480が受けて目標トルクTrsを設定してもよい。また、エアコンECU480が目標トルクTrsを設定し、その目標トルクTrsをエンジンECU500に出力してもよい。
また蒸発器目標温度設定手段401で設定された目標温度Tesと、蒸発器温度センサ402で検知された実際の温度Teとの偏差を演算し、この偏差を縮小するように目標トルクを設定して空調制御を行ってもよい。
【0109】
本発明は、以上の実施形態に限定されるものではなく、種々の変形が可能である。
例えば、以上の実施形態では、冷凍サイクルの膨張装置20として、固定オリフィスが用いられているが、可変オリフィス、温度膨張弁、電子制御弁等の弁機構を備えた膨張装置にしてもよい。この場合、弁機構の開口面積が変化するため、式(8)の係数Kは、開口面積の関数となるが、例えば熱負荷情報(外気温度、蒸発器ブロワ電圧、Pd、Ps、Pd−Ps等)や圧縮機回転速度センサ等の既存のセンサで検出可能とされる情報を代用変数として演算してもよい。
【0110】
また、式(8)の係数Kを膨張装置の流量係数の関数としてもよい。また、弁機構を備えた膨張装置においては流量係数を開口面積に応じて変化させてもよい。また、係数Kを開口面積、流量係数以外の変数の関数として演算した冷媒循環量と実際の冷媒循環量とが一致するように補正してもよい。
高圧圧力センサや低圧圧力センサの代わりに温度センサを用いて、温度情報から間接的に膨張装置の入口圧力及び出口圧力を検知してもよい。これにより、センサのコストを低減することができる。
【0111】
膨張装置の入口出口の圧力差に応答する弁機構と、弁機構に電磁力を作用させるソレノイドを備えた膨張装置を使用し、膨張装置の入口出口の圧力差を、膨張装置のソレノイドの通電量またはこれに相当する制御信号を用いて演算してもよい。
膨脹装置の入口冷媒密度を膨脹装置の入口温度から演算してもよい。
また、二酸化炭素を冷媒とする冷凍サイクルのように、冷媒を超臨界状態にして運転するものでは、膨脹装置の入口冷媒密度を膨脹装置の入口温度と膨脹装置の入口圧力とから演算してもよい。また、膨脹装置の入口の冷媒密度を膨脹装置の入口圧力から演算してもよい。
【0112】
圧縮器の駆動トルク演算式は変数として、少なくとも膨脹装置を通過する冷媒質量流量を変数として含んでいればよく、式(7)に限定されない。また、式(7)から機械効率ηmを削除して、機械損失に相当する項を式(7)に負荷してもよい。
第2実施形態及び第3実施形態においては、Psは制御電流の関数として演算されるが、例えば最大吐出容量で動作している状態では、実際のPsが制御電流から演算されたPsより大きくなる場合が想定される。このような場合トルク演算精度が悪化するので、例えば最大吐出容量状態での吐出圧力Psを推定して制御電流Iから演算された吐出圧力Psと比較し、最大吐出容量か吐出容量制御状態か判定し、その判定結果により最大吐出容量状態でのトルク演算式または吐出容量制御状態のトルク演算式を選択するという方法を行なってもよい。
【0113】
あるいは、制御電流Iから演算された吐出圧力Psが、推定された最大吐出容量状態でのP吐出圧力Psより低ければ、最大吐出容量状態での吐出圧力Psに相当する制御電流に変更して実際の吐出圧力Psと一致させる方法を行ってもよい。
熱負荷情報としては、上記実施形態のように外気温度Taや蒸発器ブロワ電圧を採用する他に、外気湿度、高圧領域の圧力及び温度、低圧領域の圧力及び温度、高圧領域と低圧領域との圧力差、日射量、エアコン各種設定(エアコンON/OFF設定、内外気切換ドア位置、社内温度設定、吹き出し口位置、エアミックスドア位置)、車内温度/湿度、蒸発器入口空気温度及び湿度、蒸発器の冷却状態を表す温度/圧力等を採用してもよい。これらを多く用いることで、精度の向上を図ることができる。
【0114】
圧縮機回転速度は、エンジン回転速度を検知して演算したが、直接圧縮機回転速度を検知すること、また車速とギヤシフト位置から間接的に演算してもよい。
また、本発明の構成をエアコンECUとコンプECUあるいはエンジンECU内に設けてもよい。
以上の実施形態では、圧縮機として、斜板式のクラッチレス可変容量圧縮機を採用したが、これに限らず、例えば固定容量圧縮機、スクロールあるいはベーン構造の可変容量圧縮機等、種々の構造の圧縮機に本発明を適用することができる。
【0115】
また、冷媒としては、R134aに限定されず、二酸化炭素やその他の新冷媒を使用してもよい。
【図面の簡単な説明】
【0116】
【図1】車両用エアコンシステムの冷凍サイクルの概略構成図である。
【図2】圧縮機の構造を示す断面図である。
【図3】本発明の第1実施形態に係る容量制御弁の構造を示す断面図である。
【図4】ソレノイドの通電量と吸入圧力との関係を示すグラフである。
【図5】第1実施形態のエアコンECUの構成を示すブロック図である。
【図6】制御電流Iの設定制御手順を示すフローチャートである。
【図7】ソレノイド駆動手段の詳細構成図である。
【図8】第2実施形態のエアコンECUの構成を示すブロック図である。
【図9】第3実施形態での圧縮機の構造を示す断面図である。
【図10】第3実施形態での容量制御弁の構造を示す断面図である。
【図11】制御電流と吸入圧力との関係を示すグラフである。
【図12】第3実施形態のエアコンECUの構成を示すブロック図である。
【図13】エンジンECUでの制御電流の設定手順を示すフローチャートである。
【図14】目標吸入圧力Pの設定手順を示すフローチャートである。
【図15】第4実施形態のエアコンECUの構成を示すブロック図である。
【図16】第4実施形態でのソレノイドの通電量と吸入圧力との関係を示すグラフである。
【図17】第2制御モードでの制御手順を示すフローチャートである。
【図18】モード切替制御手順を示すフローチャートである。
【符号の説明】
【0117】
1 冷凍サイクル
10 放熱器
20 膨脹装置
30 蒸発器
100 圧縮機
105 クランク室
107 斜板
117 ピストン
119 吸入室
120 吐出室
300 容量制御弁
304a 弁体
314 ソレノイド
400 エアコンECU
402 蒸発器温度センサ
403 高圧圧力センサ
404 低圧圧力センサ
405 エンジン回転速度センサ
406 外気温度センサ
500 エンジンECU
【技術分野】
【0001】
本発明は、エアコンシステムに使用される圧縮機のトルクを演算する技術に関する。
【背景技術】
【0002】
例えば車両エアコンシステムに用いられる圧縮機の駆動トルクは、エンジンにとって大きな負荷となっており、このため圧縮機の駆動トルクを演算または検知することは従来から重要な技術課題であった。特に可変容量圧縮機では、高外気温度領域において最大吐出容量で動作している場合と、低外気温度領域において吐出容量制御状態で動作している場合とで圧縮機の駆動トルクが大きく変化するため、圧縮機の駆動トルクを演算または検知することが必要とされている。圧縮機の駆動トルクを正確に演算または検知できない場合には、例えば車両アイドリング時において、エンジン回転速度の安定した制御が困難となるばかりでなく、エンジンストールに至る虞がある。
【0003】
圧縮機の駆動トルクTrは、以下の式(1)〜(3)により、圧縮仕事Lから理論的に求めることができる。
【0004】
【数2】
【0005】
ここで、Ncは圧縮機の回転速度、ηmは機械効率、nはポリトロープ指数、Grは冷媒質量流量、Psは吸入圧力、Vsは吸入冷媒比体積、Pdは吐出圧力、ηvは体積効率、Vcは容積である。
上記の式(1)〜(3)により圧縮機のトルクを求める方法では、可変容量圧縮機のように容積Vcが変化するようなものでは、冷媒質量流量Grを正確に演算または検知することは困難であった。
【0006】
そこで、特許文献1に記載されているように、容量制御弁のソレノイドの通電量と外気温度とから圧縮機のトルクを演算する方法が開発されている。この方法では、容積Vcが変化して吸入圧力Psが変動する場合でも圧縮機の駆動トルクの演算が可能であり、更には検知手段を削減することも可能であってコストダウンを図ることができる。
また、特許文献2には、圧縮機の吐出室と凝縮器との間に絞りを設けるとともに、絞りの上流側と下流側との差圧を機械的に検知する差圧検知手段を備え、この差圧検知手段が検知した差圧に基づいて自律的に弁開度調整可能とし、更には差圧検知手段の設定差圧を変更可能な電磁アクチュエータを備えた容量制御弁を有する可変容量圧縮機が記載されており、この容量制御弁において、電磁アクチュエータのコイルに流れる電流を変数として圧縮機の駆動トルクを演算する方法が記載されている。この方法では、冷媒流量(冷媒吐出量)が差圧検知手段で検知される差圧ΔPの関数であり、また差圧ΔPはコイルの電流Iの関数であるため、冷媒流量を簡易な方法で検知でき、駆動トルクの演算が容易となる利点がある。
【特許文献1】特開平10−38717号公報
【特許文献2】特開2001−317467号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載の方法では、ソレノイドの通電量と外気温度のみから駆動トルクを簡易的に演算しており、演算精度を十分に確保することが困難であった。
一方、特許文献2に記載の方法は、現在主流となっている吸入圧力が所定値になるように吐出容量を自律制御する可変容量圧縮機には適用できず、ソレノイドのない固定容量圧縮機にも適用できない。即ち、特許文献2に記載の方法では圧縮機のトルク演算方法としては汎用性が低いという問題点がある。また、特許文献2に記載の方法では、圧縮機の吐出室と凝縮器との間に絞りを設けることから、圧力損失が増加し、冷凍サイクルの効率が低下してしまう。更には、差圧ΔPに基づいて吐出容量をフィードバック制御する可変容量圧縮機にこの方法を採用すると、冷媒の循環量が不足している状態で圧縮機を運転させたときに、差圧ΔPが目標値に達することができず、吐出容量が加速的に増大し、常に最大容量で動作する虞もある。
【0008】
そこで、本願は上述した事情に基づいてなされ、圧縮機の構造に拘わらず広く適用可能であるとともに、冷凍サイクルの効率を低下させることなく、圧縮機の駆動トルクを正確に演算可能な駆動トルク演算装置を提供することを目的としている。
【課題を解決するための手段】
【0009】
上記の目的を達成するべく、本発明によれば、圧縮機、放熱器、膨張装置、蒸発器を順次接続してなる冷凍サイクルに適用される圧縮機の駆動トルク演算装置であって、前記膨張装置を通過する冷媒の質量流量を変数として含む演算式により前記圧縮機の駆動トルクを演算することを特徴とする圧縮機の駆動トルク演算装置が提供される(請求項1)。
好ましくは、前記膨張装置を通過する冷媒の質量流量Grを次式により演算する(請求項2)。
【0010】
【数3】
【0011】
ここで、ρは前記膨張装置の入口冷媒密度、Pexp1は前記膨張装置の入口圧力、Pexp2は前記膨張装置の出口圧力、Kは係数である。
好ましくは、前記駆動トルクを演算する演算式は、更に前記圧縮機の吐出圧力領域の圧力、吸入圧力領域の圧力及び前記圧縮機の回転速度を変数として含む(請求項3)。
好ましくは、前記冷凍サイクルの高圧領域での圧力である高圧圧力を検出する高圧圧力検知手段が備えられ、前記膨張装置の入口圧力を前記高圧圧力検知手段により検知された高圧圧力を変数として演算する(請求項4)。
【0012】
好ましくは、前記高圧圧力検知手段を前記高圧領域におけるガス領域に設置する(請求項5)。
好ましくは、前記冷凍サイクルの低圧領域での圧力である低圧圧力を検知する低圧圧力検知手段を備え、前記膨張装置の出口圧力を前記低圧圧力検知手段により検知された低圧圧力を変数として演算する(請求項6)。
【0013】
好ましくは、前記圧縮機は、冷媒が吸入される吸入圧力領域と、該吸入された冷媒を圧縮する圧縮機構と、該圧縮された冷媒が吐出される吐出圧力領域と、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量機構と、当該可変容量機構を作動させる制御圧力を蓄える制御圧力室と、前記吸入圧力領域の圧力を検知する検知部材を有する弁機構と、前記弁機構に電磁力を作用させるソレノイドとから構成されて前記制御圧力室の圧力を変更する容量制御弁とを具備し、外部情報を検知する外部情報検知手段により検知された外部情報に基づいて前記容量制御弁の開度を調整し、前記制御圧力室の圧力を変化させて前記可変容量機構を作動させ、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量圧縮機であって、前記吸入圧力検知部材が前記低圧圧力検知手段を構成し、前記吸入圧力領域の圧力を前記ソレノイドの通電量またはこれに相当する制御信号を変数として演算し、該演算された前記吸入圧力領域の圧力を変数として前記膨張装置の出口圧力を演算する(請求項7)。
【0014】
好ましくは、前記圧縮機は、冷媒が吸入される吸入圧力領域と、該吸入された冷媒を圧縮する圧縮機構と、該圧縮された冷媒が吐出される吐出圧力領域と、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量機構と、該可変容量機構を作動させる制御圧力を蓄える制御圧力室と、前記吐出圧力領域の圧力を受ける第1受圧面と、該第1受圧面に作用する前記吐出圧力領域の圧力と対向する方向に前記吸入圧力領域の圧力を受ける第2受圧面とが形成された感圧部材を有する弁機構と、前記感圧部材に作用する前記吐出圧力領域の圧力による力と対抗する方向に前記弁機構に電磁力を作用させるソレノイドとから構成されて前記制御圧力室の圧力を変更する容量制御弁とを具備し、外部情報を検知する外部情報検知手段により検知された外部情報に基づいて前記容量制御弁の開度を調整し、前記制御圧力室の圧力を変化させて前記可変容量機構を作動させ、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量圧縮機であって、前記吸入圧力領域の圧力は、前記高圧圧力検知手段により検知された高圧圧力と、前記ソレノイドの通電量またはこれに相当する制御信号と、を変数として演算し、該演算された前記吸入圧力領域の圧力を変数として前記膨張装置の出口圧力を演算する(請求項8)。
【0015】
好ましくは、前記膨張装置の入口圧力及び前記膨張装置の出口圧力を演算する演算式は、更に前記冷凍サイクルの熱負荷情報及び前記圧縮機の回転数の少なくともいずれか1つの外部情報を変数として演算する(請求項9)。
好ましくは、前記膨張装置の入口冷媒密度は、前記膨張装置の入口冷媒温度及び前記高圧圧力検知手段により検知された高圧圧力の少なくともいずれか1つを変数として演算する(請求項10)。
【0016】
好ましくは、前記膨張装置は弁機構を有し、前記係数Kを前記弁機構の開口面積を変数として演算し、前記弁機構の開口面積を前記冷凍サイクルの熱負荷情報及び前記圧縮機の回転数の少なくともいずれか1つの外部情報を変数として演算する(請求項11)。
好ましくは、前記圧縮機は外部駆動源により駆動され、前記駆動トルク演算装置は、演算した前記圧縮機の駆動トルクを前記外部駆動源の制御装置に出力する(請求項12)。
【0017】
また、冷媒が吸入される吸入圧力領域と、該吸入された冷媒を圧縮する圧縮機構と、該圧縮された冷媒が吐出される吐出圧力領域と、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量機構と、当該可変容量機構を作動させる制御圧力を蓄える制御圧力室と、前記制御圧力室の圧力を変更する容量制御弁とを具備し、外部情報を検知する外部情報検知手段により検知された外部情報に基づいて前記容量制御弁の開度を調整し、前記制御圧力室の圧力を変化させて前記可変容量機構を作動させ、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量圧縮機の容量制御システムであって、前記容量制御システムは、請求項1〜12のいずれか1項に記載の駆動トルク演算装置と、前記圧縮機の吐出容量制御の目標となる駆動トルクを設定する目標トルク設定手段とを備え、前記駆動トルク演算装置で演算された前記圧縮機の駆動トルクが、前記目標トルク設定手段で設定された目標トルクに近づくように前記容量制御弁の開度を調整することを特徴とする可変容量圧縮機の容量制御システムが提供される(請求項13)。
【発明の効果】
【0018】
本発明の請求項1の圧縮機の駆動トルク演算装置では、膨張装置を通過する冷媒の質量流量を冷凍サイクルでの冷媒循環量として駆動トルクを演算するので、圧縮機の構造に拘わらず正確に駆動トルクを演算することができる。
請求項2の圧縮機の駆動トルク演算装置では、冷媒の質量流量が正確に求められ、簡素な構成で駆動トルクの演算精度を向上させることができる。
【0019】
また、膨張装置の減圧作用を利用して冷媒循環量を演算するので、駆動トルクの演算を行う為に冷凍サイクルに新たに絞りを設ける必要がなく、冷凍サイクルの効率低下を防止することができる。更に膨張装置の入口圧力と出口圧力との差圧を用いて冷媒循環量を演算することから、差圧を十分に大きく取ることができ、特に可変容量圧縮機のように吐出流量が小さくなる場合でも差圧を検出でき、低吐出容量時の冷媒循環量の演算を可能とすることができる。
【0020】
請求項3の圧縮機の駆動トルク演算装置では、圧縮機の吐出圧力領域の圧力、吸入圧力領域の圧力及び圧縮機の回転速度を変数として含むことで、圧縮機の駆動トルクの演算精度を向上させることができる。
請求項4の圧縮機の駆動トルク演算装置では、膨張装置の入口圧力の演算精度を確保することができる。
【0021】
請求項5の圧縮機の駆動トルク演算装置では、ガス領域における高圧圧力の素早い変化に応答して冷媒循環量が演算可能となり、過渡運転時での圧縮機の駆動トルクの演算精度を向上させることができる。
請求項6の圧縮機の駆動トルク演算装置では、膨張装置の出口圧力の演算精度を確保することができる。
【0022】
請求項7の圧縮機の駆動トルク演算装置では、容量制御弁の検知部材が低圧圧力検知手段を兼ねているため、駆動トルク演算装置の簡素化を図ることができる。また、圧縮機側の吸入圧力領域の圧力変化に同期して冷媒循環量を演算可能となり、圧縮機の駆動トルクの演算精度を向上させることができる。
請求項8の圧縮機の駆動トルク演算装置では、高圧圧力検知手段と容量制御弁の感圧部材とで吸入圧力領域の圧力及び膨張装置の出口圧力を演算するため、駆動トルク演算装置の簡素化を図ることができる。また、圧縮機側の吐出圧力領域の圧力変化に同期して冷媒循環量を演算可能となり、圧縮機の駆動トルクの演算精度を向上させることができる。
【0023】
請求項9の圧縮機の駆動トルク演算装置では、膨張装置の入口圧力及び出口圧力の演算精度が向上し、圧縮機の駆動トルクの演算精度を向上させることができる。
請求項10の圧縮機の駆動トルク演算装置では、膨張装置の入口冷媒温度の演算精度が向上し、圧縮機の駆動トルクの演算精度を向上させることができる。
請求項11の圧縮機の駆動トルク演算装置では、弁機構を有する膨張装置の冷媒循環量の演算精度が向上し、圧縮機の駆動トルクの演算精度を向上させることができる。
【0024】
請求項12の圧縮機の駆動トルク演算装置では、圧縮機の駆動トルク演算精度が向上するため、外部駆動源の作動制御の安定化に寄与できる。
請求項13の圧縮機の駆動トルク演算装置では、エンジン負荷に応じて圧縮機の正確な駆動トルク制御が可能となり、エンジンとの協調制御が可能となる。
【発明を実施するための最良の形態】
【0025】
図1は、車両用エアコンシステムの冷凍サイクルの概略構成図である。
図1に示すように、車両用エアコンシステムの冷凍サイクル1は、作動流体としての冷媒(例えばR134a)が循環する循環路5を備える。循環路5には、冷媒の流動方向で順番に、圧縮機100、放熱器(凝縮器)10、膨張装置(固定オリフィス)20、蒸発器30、液体状の冷媒を貯留するアキュムレータ40が介挿されている。圧縮機100は、冷媒の吸入工程、吸入した冷媒の圧縮工程及び圧縮した冷媒の吐出工程からなる一連のプロセスを行い、循環路5に冷媒を循環させる。
【0026】
蒸発器30は、車両用空調システムの空気回路の一部をも構成している。蒸発器30を通過する空気流は、蒸発器30内の冷媒によって気化熱を奪われて冷却される。冷媒は、例えばR134aのように高圧領域で凝縮する特性を有している。
図2は、圧縮機100の構造を示す断面図である。
圧縮機100は、斜板式のクラッチレス可変容量圧縮機であり、複数のシリンダボア101aを備えたシリンダーブロック101と、シリンダーブロック101の一端に連結されたフロントハウジング102と、シリンダーブロック101の他端にバルブプレート103を介して連結されたリアハウジング104とを備えている。
【0027】
シリンダーブロック101とフロントハウジング102とによってクランク室105が規定され、クランク室105内を縦断して駆動軸106が延びている。駆動軸106は、クランク室105内に配置された環状の斜板107を貫通し、斜板107は、駆動軸106に固定されたロータ108と連結部109を介してヒンジ結合されている。従って、斜板107は、駆動軸106に沿って移動しながら傾動可能である。
【0028】
ロータ108と斜板107との間には、駆動軸106の周囲に、斜板107を最小傾角に向けて付勢するコイルばね110が装着される一方、斜板107を挟んで反対側、即ち斜板107とシリンダーブロック101との間には、駆動軸106の周囲に、斜板107を最大傾角に向けて付勢するコイルばね111が装着されている。
駆動軸106は、フロントハウジング102の外側に突出したボス部102a内を貫通して、その先端が外側まで延在している。駆動軸106とボス部102aとの間には、軸封装置112が挿入されており、フロントハウジング102の内部と外部とを遮断している。駆動軸106はラジアル方向及びスラスト方向にベアリング113,114,115,116によって回転自在に支持されている。駆動軸106は、ボス部102aから突出した先端にエンジン等の外部駆動源から駆動力が伝達されて、回転駆動される。
【0029】
シリンダボア101a内にはピストン117が配置され、ピストン117には、クランク室105内に突出したテール部が一体に形成されている。テール部に形成された凹所117a内には一対のシュー118が配置され、シュー118は斜板107の外周部に対し挟み込むように摺接している。従って、シュー118を介して、ピストン117と斜板107とは互いに連動し、駆動軸106の回転によりピストン117がシリンダボア101a内を往復動する。
【0030】
リアハウジング104には、吸入室119(吸入圧力領域)及び吐出室120(吐出圧力領域)が区画形成され、吸入室119は、バルブプレート103に設けられた吸入孔103aを介してシリンダボア101aと連通可能である。吐出室120は、バルブプレート103に設けられた吐出孔103bを介してシリンダボア101aと連通している。なお、吸入孔103a及び吐出孔103bは、図示しない吸入弁及び吐出弁によってそれぞれ開閉される。
【0031】
シリンダーブロック101の外側にはマフラ121が設けられている。マフラを構成をするマフラケーシング122は、シリンダーブロック101に一体に形成されたマフラベース101bに図示しないシール部材を介して接合されている。マフラケーシング122及びマフラベース101bはマフラ空間123を規定し、マフラ空間123は、リアハウジング104、バルブプレート103及びマフラベース101bを貫通する吐出通路124を介して吐出室120と連通している。
【0032】
マフラケーシング122には吐出ポート122aが形成され、マフラ空間123には、吐出通路124と吐出ポート122aとの間を遮るように逆止弁200が配置されている。具体的には、逆止弁200は、吐出通路124側の圧力とマフラ空間123側の圧力との圧力差に応じて開閉し、この圧力差が所定値より小さい場合閉作動し、圧力差が所定値より大きい場合は開作動する。
【0033】
吐出室120は、吐出通路124、マフラ空間123及び吐出ポート122aを介して循環路5の往路部分と連通可能であり、この連通は逆止弁200によって断続される。一方、吸入室119は、リアハウジング104に設けられた吸入ポート104aを介して循環路5の復路部分と連通している。
リアハウジング104には、容量制御弁(電磁制御弁)300が接続されており、容量制御弁300は、吐出室120とクランク室105とを連通する給気通路125に介装されている。給気通路125の一部は、吐出室120とクランク室105との間を連通するようにリアハウジング104からバルブプレート103を経てシリンダーブロック101にまで亘っている。
【0034】
一方、吸入室119は、クランク室105と抽気通路126を介して連通している。抽気通路126は、駆動軸106とベアリング115,116との隙間、空間128及びバルブプレート103に形成された固定オリフィス103cからなる。
また、容量制御弁300は、感圧通路127を通じて、給気通路125とは独立して吸入室119に接続されている。容量制御弁300は、クランク室105への吐出ガス導入量を調整してクランク室105内の圧力を変化させることで、圧縮機100の吐出容量を変化させる機能を有する。容量制御弁300には、圧縮機100の外部に設けられたエアコンECU400が接続され、エアコンECU400から供給される制御電流Iに基づいて作動制御される。
【0035】
図3は、本発明の第1実施形態に係る容量制御弁300の構造を示す断面図である。
図3に示すように、容量制御弁300は、弁ユニットと弁ユニットを開閉作動させる駆動ユニットとからなる。弁ユニットは、円筒状の弁ケーシング301を有し、内部に感圧室302、弁室306が軸方向に並んで形成されている。弁ケーシング301の外周面には、通孔301a、通孔301c及び通孔301dが形成されている。感圧室302は通孔301a及び感圧通路127を介して吸入室119と連通している。弁室306は、通孔301c及び給気通路125の上流側部分を介して吐出室120と連通している。通孔301dは、給気通路125の下流側部分を介してクランク室105と連通している。弁室306と通孔301dとは弁ケーシング301の中央で軸方向に延びる弁孔301bにより連通可能となっている。
【0036】
感圧室302内には、ベローズ303が配設されている。ベローズ303は、内部を真空にしてバネが内蔵され、弁ケーシング301の軸方向に変位可能に配置されており、感圧室302内、即ち吸入室119内の圧力である吸入圧力Psを受圧する機能を有する。
弁ケーシング301には、感圧ロッド304が軸方向に摺動可能に支持されている。感圧ロッド304は、一端がベローズ303に当接している一方、他端には円柱状の弁体304aが一体成形されている。弁体304aは、ベローズ303の伸縮に応じて移動し弁孔301bを開閉する機能を有する。
【0037】
ベローズ303は、感圧ロッド304とは反対側の端部がベローズガイド313により支持されている。ベローズガイド313は、圧力設定部材314に摺動可能に支持されている。圧力設定部材314は、一端が閉塞された筒状に形成されており、弁ケーシング301に軸方向に圧入固定されている。圧力設定部材314とベローズガイド313との間には、ベローズ303を感圧ロッド304に向かって(開弁方向に)押圧する強制解放バネ315が配設されている。
【0038】
駆動ユニットは円筒状のソレノイドケーシング310を有し、ソレノイドケーシング310は弁ケーシング301の他端に同軸的に連結されている。ソレノイドケーシング310内には、筒状のソレノイド312が収容されている。またソレノイドケーシング310内には、同心上に円筒状の固定コア305が収容かつ固定され、固定コア305は、弁ケーシング301からソレノイド312の内部をその中央まで延びている。固定コア305は、弁ケーシング301と反対側の端部が、一端が閉塞した筒状のスリーブ311によって囲まれて閉塞している。スリーブ311と固定コア305との間には、軸方向に所定の隙間を有して可動コア307が収納されている。
【0039】
固定コア305の弁ユニット側の端部には、中央を貫通する孔の一部として支持孔305aが形成され、支持孔305aには弁体304aの一端が摺動可能に挿入され弁体304aを支持する。
固定コア305にはソレノイドロッド308が挿入されており、ソレノイドロッド308の一端は弁体304aに固定され、他端は固定コア305から突出して可動コア307に固定されている。可動コア307とスリーブ311との間には、可動コア307を固定コア305側に向かって(閉弁方向に)押圧するばね309が設けられている。
【0040】
可動コア307、固定コア305及びソレノイドケーシング310は磁性材料で形成され、磁気回路を構成する。スリーブ311は非磁性材料のステンレス系材料で形成されている。
スリーブ311の内部の空間は、通孔301eを介して感圧室302と連通している。したがって、弁体304aの他端側の面には吸入圧力Psによる力が作用する。
【0041】
弁孔301bの断面積と支持孔305aに支持される弁体304aの断面積が略同等に設定されている。したがって、弁体304aには、開方向及び閉方向に吐出圧力Pdによる力が作用しない。また、感圧ロッド304の断面積も弁孔301bの断面積と略同等に設定されており、弁体304aには開方向及び閉方向に夫々通孔301d内の圧力、即ちクランク室105内の圧力であるクランク圧力Pcによる力が作用して、これらを互いに打ち消し合っている。
【0042】
したがって容量制御弁300の吸入圧力制御特性は、実質的に吐出圧力Pd及びクランク圧力Pcの影響を受けず、ソレノイド312の通電量(制御電流)Iに基づいて制御対象となる吸入圧力Psを一義的に決定できる。図4は、ソレノイド312の通電量(制御電流)と吸入圧力Psとの関係を示すグラフである。
詳しくは、容量制御弁300の弁体304aに作用する力は、ソレノイド312による電磁力F(I)の他に、ばね309による付勢力fs1、ベローズ303による付勢力fs2(ベローズ303内のばね及び強制開放バネ315による付勢力)、吸入圧力Psによる付勢力であって、その関係は、ベローズ303の有効受圧面積をSbとすると、式(4)で表される。そして、この式(4)を、吸入圧力Psを求める式に変形すると、式(5)となる。
【0043】
【数4】
【0044】
ここでSbは定数であり、ばね309による付勢力fs1及びベローズ303による付勢力fs2は変位に基づいて決定されるので、式(5)からソレノイドの制御電流Iに基づいて制御対象となる吸入圧力Psが一義的に決定されることが判明される。
次に、圧縮機100の動作について説明する。
車両エンジン作動状態でエアコン非作動時には、エアコンECU400は容量制御弁300のソレノイド312へ電流を供給せず、強制開放バネ315の付勢力により弁体304aが強制開放されて圧縮機100の吐出容量は最小となる。このとき、逆止弁200が閉じるようにその内部のばねの付勢力が設定されており、その結果凝縮器10側への冷媒循環は遮断される。最小の吐出容量で吐出室120に吐出された冷媒は容量制御弁300を含む吐出室120とクランク室105との連通路125を経てクランク室105に流入し、さらにクランク室105から、ベアリング115、116と駆動軸106との隙間を抜け、固定オリフィス103cを介して吸入室119に戻る内部循環回路を循環している。
【0045】
エアコンを作動開始すると、容量制御弁300のソレノイド312へ所定の電流が流れ、吐出室120とクランク室105との連通路125が遮断されるため、クランク圧力Pcが低下して吸入圧力Psと同等となり、斜板107の傾角が増大して、ピストンストロークが増大する。これにより、吐出室120の圧力が高まり、逆止弁200の前後差圧が所定値を超えると逆止弁200が開弁して圧縮冷媒が凝縮器10側に流れる。そして、圧縮機100の作動時には、エアコンECU400は、容量制御弁300のソレノイド312へ所定の電流を通電し、図4に示す所定の吸入圧力を維持するように圧縮機100の吐出容量が制御される。
【0046】
図5はエアコンECU400における本発明の特徴部分の構成を示したブロック図である。
エアコンECU400は、目標吸入圧力設定手段410、ソレノイド駆動手段411、エンジンの駆動トルク演算手段412及び各種センサ、設定手段から構成されている。
上記各種センサとしては、蒸発器温度センサ402、高圧圧力センサ403、低圧圧力センサ404、エンジン回転速度センサ405、外気温度センサ406が用いられる。蒸発器温度センサ402は、通風経路の蒸発器30出口に設置され、蒸発器出口空気温度Teを検知する。高圧圧力センサ403は、凝縮器10の入口側に設置され、圧縮機100の吐出室120から膨張装置20の入口までの高圧領域における冷媒圧力である高圧圧力PHを検知する。低圧圧力センサ404は、アキュムレータ40の入口側に設置され、圧縮機100の吸入室119から膨張装置20の出口までの低圧領域における冷媒圧力である低圧圧力PLを検知する。エンジン回転速度センサ405は、エンジン回転速度を検出するものであって、所定のプーリ比を掛けて圧縮機100の駆動速度の情報として使用する。エンジン回転速度センサ405からのエンジン回転速度情報は、エンジンECU500を経由して入力される。外気温度センサ406は、例えば通風経路の蒸発機30入口に設置され、外気温度Taを検知する。
【0047】
エアコンECU400には、上記設定手段として、蒸発器目標温度設定手段401及び蒸発器ブロワ電圧設定器407が用いられている。蒸発器目標温度設定手段401は、図示しない温度設定器から入力した車室内設定温度と外部情報に基づいて、圧縮機100の吐出容量制御の最終目標値となる蒸発器出口での空気の目標温度Tesを設定する。蒸発器ブロワ電圧設定器407は蒸発器30の送風量を決定するブロワ電圧VLを設定する。
【0048】
目標吸入圧力設定手段410は、蒸発器目標温度設定手段401で設定された目標温度Tesと、蒸発器温度センサ402で検知された実際の蒸発器出口空気温度Teとの偏差を演算し、この偏差を縮小するように圧縮機100の目標吸入圧力Pss、即ち吐出容量制御信号としての容量制御弁300への制御電流Iを設定する。
目標吸入圧力設定手段410における制御電流Iの設定要領を図6を用いて詳述する。図6は、制御電流Iの設定制御手順を示すフローチャートである。
【0049】
先ずステップ10では、蒸発器目標温度設定手段401で設定された目標温度Tesを読み込む。そして、ステップS11に進む。
ステップS11では、蒸発器温度センサ402で検知された蒸発器出口空気温度Teを読み込む。そして、ステップS12に進む。
ステップS12では、ステップ10で読み込んだ目標温度TesとステップS11で読み込んだ蒸発器出口空気温度Teとの差ΔTを求める。そして、S13に進む。
【0050】
ステップS13では、制御電流Iを演算する。詳しくは、制御電流I(In)は式(6)により求められる。なお、a1、a2は定数であり、適宜設定される。
In=In−1+a1・((ΔTn−ΔTn−1)+a2・ΔTn)・・・(6)
そして、ステップS14に進む。
ステップS14では、制御電流Iが所定値I1以上であるか否かを判別する。所定値I1以上である場合は、ステップS15に進む。
【0051】
ステップS15では、制御電流Iが所定値I2以下であるか否かを判別する。所定値I2以下である場合は、ステップS16に進む。
ステップS16では、制御電流Iをソレノイド駆動手段411に出力する。そして本ルーチンをリターンする。
一方、ステップS14において制御電流Iが所定値I1未満であると判定した場合は、ステップS17に進む。
【0052】
ステップS17では、所定値I1を制御電流Iとして書き換える。そしてステップS16に進む。
ステップS15において制御電流Iが所定値I2より大きいと判定した場合、ステップS18に進む。
ステップS18では、所定値I2を制御電流Iとして書き換える。そしてステップS16に進む。
【0053】
以上のように、目標吸入圧力設定手段410では、目標温度Tesと実際の温度である蒸発器出口空気温度Teとの差が縮小するようにPI制御により制御電流Iを制御する。制御電流Iは予め定められた範囲内(I1≦I≦I2)で設定される。
ソレノイド駆動手段411は、目標吸入圧力設定手段410で設定された制御電流Iに基づいて容量制御弁300のソレノイド312を駆動する。制御電流Iは所定の駆動周波数(例えば400〜500Hz)のPWM(パルス幅変調)により、デューティ比を変更することにより調整される。
【0054】
図7は、ソレノイド駆動手段411の詳細構成図である。
ソレノイド駆動手段411は、図7に示すように、電流検知手段510、制御電流比較判定手段511、制御信号発生手段512、スイッチング素子及びダイオードにより構成されている。電流検知手段510は、容量制御弁300のソレノイド312に実際に流れている実電流を検出する。制御電流比較判定手段511は、目標吸入圧力設定手段410から入力した制御電流Iと電流検知手段510により検出した実電流とを比較する。制御信号発生手段512は、制御電流比較判定手段511により比較された結果に基づいて、スイッチング素子を制御する制御信号を発生する。スイッチング素子は、制御信号発生手段512からの制御信号に基づいて、電源ラインからソレノイド312に供給される電流を制御する。即ち、ソレノイド駆動手段411は、ソレノイド312に供給される電流が目標吸入圧力設定手段410で設定された制御電流Iとなるようにフィードバック制御する。
【0055】
以上からエアコンECU400の空調制御は、蒸発器目標温度設定手段401で設定された目標温度Tesに、蒸発器温度センサ402で検知された蒸発器出口空気温度Teが近づくように目標吸入圧力Pss、延いては制御電流Iを設定し、結果として圧縮機100の吐出容量を制御するものである。
エアコンECU400の駆動トルク演算手段412は、高圧圧力センサ403、低圧圧力センサ404、エンジン回転速度センサ405の各センサで検知された外部情報に基づいて圧縮機100の駆動トルクTrを演算し、エンジンECU500に出力する。エンジンECU500は圧縮機100の駆動トルク情報を参照してエンジンを最適な運転状態に制御する。
【0056】
駆動トルク演算手段412において、圧縮機100の駆動トルクTrは以下の式(7)により求められる。
【0057】
【数5】
【0058】
ここで、Ncは圧縮機100の回転速度、ηmは機械効率、nはポリトロープ指数、Grは冷媒質量流量、Psは吸入圧力、Vsは吸入冷媒比体積、Pdは吐出圧力、ηvは体積効率である。
上記式(7)では、冷媒質量流量Grを圧縮機100のピストン押しのけ量から算出するのではなく、膨張装置20を通過する冷媒質量流量として計算することを特徴としている。このように、質量流量から計算すれば、圧力変動に拘わらず、冷凍サイクルの如何なる位置で測定した情報をもとに演算可能である。したがって、各種圧縮機に広く採用することができる。
【0059】
膨張装置20を通過する冷媒質量流量Grは、以下の式(8)により求められる。
【0060】
【数6】
【0061】
ρは膨張装置20の入口での冷媒密度、Pexp1は膨張装置20の入口圧力、Pexp2は膨張装置20の出口圧力、Kは係数であり、膨張装置20の流量係数Cと開口面積Aを含んでいる(K∝C・A)。
ここで、高圧圧力センサ403で検知された圧力をPHとすれば、膨張装置20の入口圧力Pexp1は、凝縮器10及び凝縮器10から膨張装置20に至る配管での損失を考慮して、Pexp1=f1(PH)で演算される。また、低圧圧力センサ405で検知された圧力をPLとすれば、膨張装置20の出口圧力Pexp2は、蒸発器30及び凝縮器30から膨張装置20に至る配管での損失を考慮して、Pexp2=f2(PL)で演算される。
【0062】
さらに、膨張装置20の入口での冷媒密度ρは、膨張装置20の入口における冷媒の飽和温度Texp1を変数として演算可能であるが、飽和温度Texp1は膨張装置20の入口圧力Pexp1で演算できるため、結局ρ=f3(Pexp1)=f3(f1(PH))で演算され、膨張装置20の入口の冷媒密度ρは高圧圧力センサ403で検知された高圧圧力PHから演算される。
【0063】
したがって膨張装置20を通過する冷媒質量流量Grは、高圧圧力センサ403で検知された高圧圧力PH、低圧圧力センサ404で検知された低圧圧力PLによって演算可能となる。
さらに、吐出圧力Pdは、吐出室120と高圧圧力センサ403が設置されている間の圧力損失を考慮して、Pd=f4(PH)で演算される。また吸入圧力Psは、吸入室119と低圧圧力センサ404が設置されている間の圧力損失を考慮して、Ps=f6(PL)で演算される。
【0064】
なお、これらの圧力損失は、例えば熱負荷情報として外気温度センサ406で検知される外気温度Ta及び蒸発器ブロワ電圧設定器407で設定されるブロワ電圧VLと、圧縮機回転速度Ncを変数として補正すればよく、Ta、VL、Ncが増大したときに圧力損失が増加するように補正すればよい。即ち、Pexp1、Pd、Pexp2、Psは次式(9)〜(12)で演算される。
Pexp1=f1(PH)=f1(PH、Ta、VL、Nc)・・・(9)
Pd=f4(PH、Ta、VL、Nc)・・・(10)
Pexp2=f2(PL)=f2(PL、Ta、VL、Nc)・・・(11)
Ps=f5(PL)=f5(PL、Ta、VL、Nc)・・・(12)
また、圧縮機回転速度Ncは、エンジン回転速度センサ405で検知されたエンジン回転速度Neに所定のプーリ比Rを掛けて、Nc=R・Neで演算される。なお、機械効率ηm
はあらかじめ定められた係数である。また吸入室119内の冷媒の比体積Vsは吸入圧力PsからVs=f6(Ps)で演算される。
【0065】
以上から、圧縮機100の駆動トルクは、高圧圧力センサ403、低圧圧力センサ404、エンジン回転速度センサ405、外気温度センサ406、蒸発器ブロワ電圧設定器407の各センサの出力信号により演算可能となり、これをエンジンECU500に出力することにより、適正なエンジン回転速度に制御され、特にアイドリング時のエンジン回転速度制御の安定化に寄与できる。
【0066】
図8は、本発明の第2実施形態のエアコンECU420の構成を示したブロック図である。
本発明の第2実施形態は、上述した第1実施形態のエアコンECU400をエアコンECU420に置き換えたものである。以下、第1実施形態と異なる点を説明する。
エアコンECU420は、エアコンECU400から低圧圧力センサ404を削除し、低圧圧力センサ404により検知される低圧圧力PLの代用として、目標吸入圧力設定手段410で設定された目標吸入圧力Pssを駆動トルク演算手段421に入力し、駆動トルクTrを演算する。
【0067】
圧縮機100は吸入圧力領域の圧力を制御するものであり、吸入圧力Psは図4に示すようにソレノイド312の制御電流Iから一義的に決定され、式(5)から演算される。そして、膨張装置20の出口圧力Pexp2は、吸入室119から蒸発器30を挟んで膨張装置20の出口領域に至る圧力損失を考慮して演算すれば、低圧圧力センサ404は削除可能となる。
【0068】
したがって、第2実施形態では、駆動トルク演算手段421において、第1実施形態におけるPexp2=f2(PL)の代わりにPexp2=f7(Ps)とし、Ps=f6(PL)の代わりに式(5)を用いて、式(7)及び式(8)により駆動トルクTrが演算される。
第2実施形態では、吐出圧力Pdと吸入圧力Psとから冷媒質量流量Grを演算するため、圧縮機100側の圧力変化に同期して膨脹装置の冷媒質量流量を演算可能となり、圧縮機100の駆動トルクの演算精度向上に寄与する。
【0069】
次に図9〜図14を用いて本願の第3実施形態について説明する。
図9は第3実施形態での圧縮機100の構造を示す断面図である。図9に示すように、第3実施形態は、第1実施形態に対して圧縮機100の本体の構成は同一であるものの、これに付属する容量制御弁350と容量制御弁を作動制御するエアコンECUが異なっている。
【0070】
図10は第3実施形態での容量制御弁350の構造を示す断面図である。
図10に示すように、容量制御弁350はベローズのない容量制御弁であり、円筒状の弁ケーシング351の内部には弁室353が形成されている。弁ケーシング351の外周面には連通孔351bが形成されているとともに、弁ケーシング351の先端中央部には軸方向に延びる弁孔351aが形成されている。弁室353は、弁孔351a及び給気通路125の上流側部分を介して吐出室120と連通しているとともに、連通孔351b及び給気通路125の下流側部分を介してクランク室105と連通している。
【0071】
弁室353内に収納された弁体354は、その一端で弁孔351aを開閉する機能を有する。弁体354の他端は、固定コア352に軸方向に摺動可能に挿入されたソレノイドロッド355の一端に固定されている。ソレノイドロッド355の他端に固定された可動コア356と固定コア352との間には開放バネ357が設けられており、開放バネ357は可動コア356を固定コア352から遠ざかる方向(開弁方向)に付勢させる。
【0072】
ソレノイドハウジング358の外周面には、連通孔358aが形成されている。ソレノイドハウジング358と固定コア352との間には連通溝352bが形成されており、連通溝352bは、固定コア352及び可動コア356を覆うスリーブ359の内部の可動コア収納部分である空間361と連通孔358aとを連通する。連通孔358aは、感圧通路127を介して吸入室119と連通しており、ソレノイドロッド355には吸入圧力Psが作用する。したがって、弁体354の一端側(第1受圧面)には吐出圧力Pdが作用する一方、他端側(第2受圧面)にはソレノイドロッド355を介して吸入圧力Psが作用し、弁体354とソレノイドロッド355との一体構成物が感圧部材として機能する。弁体354が弁孔351aを閉じたときの弁体354の受圧面積(シール面積)Svと、挿通孔352aに支持されたソレノイドロッド355の断面積Srとが同等に設定されており、したがって、弁体354に作用する力は、開放バネ357による付勢力をfsとすると、以下の式(13)の関係が成り立つ。そして、式(13)を変形してPsについて求めると、式(14)となる。
【0073】
【数7】
【0074】
したがって、吐出圧力Pdと電磁力F(I)が決定されれば吸入圧力Psが決定することが判明する。
つまり、制御対象としての目標吸入圧力Pssを予め設定し、変動する吐出圧力Pdの情報が判れば、電磁力F(I)延いては電流Iを演算できる。そして、ソレノイド360への通電量をこの演算値Iに基づいて調整すれば、目標吸入圧力Pssを維持するように弁体354が動作してクランク圧力Pcを調整し、圧縮機100の吐出容量制御が可能となる。
【0075】
図11は、制御電流と吸入圧力Psとの関係を示すグラフである。図11に示すように、吐出圧力Pdの状況に応じて吸入圧力制御範囲をスライドできることが容量制御弁350の特徴であり、これにより熱負荷の高い領域でも吐出容量制御が可能となる。また、式(14)からシール面積Svを小さく設定すれば小さな電磁力でも吸入圧力制御範囲を拡大できることが判明され、これらの相乗効果により第1実施形態の容量制御弁300に対して吸入圧力制御範囲を大幅に拡大できる。つまり本実施形態では、吸入圧力Psを制御対象としても、熱負荷の高い領域で圧縮機100の起動直後から吐出容量制御を可能とするものである。なお、ソレノイド360への通電量を0とすると、開放バネ357の付勢力により弁体354は弁孔351aを強制開放する。これにより、吐出室120から冷媒がクランク室105に導入され、圧縮機100の吐出容量は最小となる。
【0076】
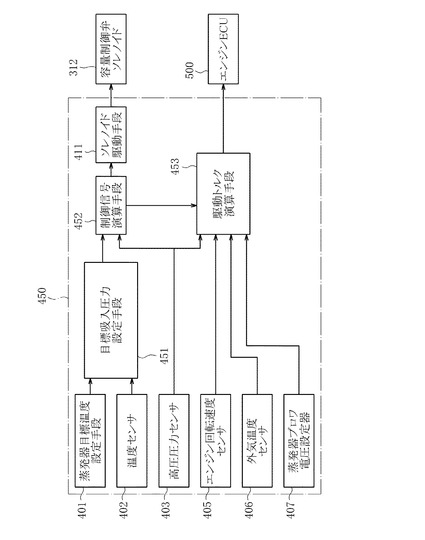
図12は、エアコンECU450の構成図である。
エアコンECU450は、第2実施形態のエアコンECU420に対し、目標吸入圧力設定手段及び駆動トルク演算手段が異なり、更に制御信号演算手段452が追加されている。
目標吸入圧力設定手段451は、蒸発器目標温度設定手段401で設定された目標温度Tesと、蒸発器温度センサ402で検知された実際の温度である蒸発器出口空気温度Teとの偏差を演算し、この偏差を縮小するように目標吸入圧力Pssを設定する。
【0077】
制御信号演算手段452は、目標吸入圧力設定手段451で設定された目標吸入圧力Pssと吐出圧力Pdとから式(14)により、ソレノイド360への通電量Iを演算する。ここで、吐出圧力Pdは、吐出室120と高圧圧力センサ403が設置されている間の圧力損失を考慮して、Pd=f4(PH)で演算される。
駆動トルク演算手段453は、高圧圧力センサ403で検知された高圧圧力PH、エンジン回転速度センサ405で検知されたエンジン回転速度Ne、制御信号演算手段で演算された制御電流Iとから圧縮機100の駆動トルクTrを演算する。
【0078】
駆動トルクTrの演算は、第1実施形態及び第2実施形態と同様に、式(7)及び式(8)から求められる。ここで、またPd=f4(PH)であるので、吸入圧力Psは制御電流Iと高圧圧力PHとの関数となる。また、膨脹装置20の出口に至る圧力損失を考慮して、膨張装置20の出口圧力Pexp2は、Pexp2=f7(Ps)により演算可能となり、低圧圧力センサ404が不要となる。
【0079】
また、式(14)を変形すると、式(15)となる。
【0080】
【数8】
【0081】
したがって、Pd−Psが制御電流Iの関数となる。膨脹装置20の入口出口の圧力差Pexp1−Pexp2は、Pd−Psから圧力損失を考慮して演算可能であることから、Pexp1−Pexp2=f8(I)として、制御電流Iから直接演算してもよい。
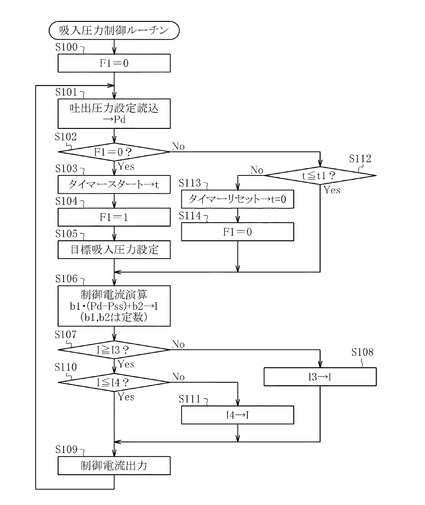
図13は、エンジンECU450での制御電流Iの設定手順を示すフローチャートである。
【0082】
先ずステップ100では、フラッグF1=0に設定する。そして、ステップS101に進む。
ステップS101では、熱負荷情報に基づく圧力損失補正後の吐出圧力Pd(=f4(PH、Ta、VL、Nc))を読み込む。そして、ステップS102に進む。
ステップS102では、フラッグF1=0であるか否かを判別する。F1=0である場合は、ステップS103に進む。
【0083】
ステップS103では、タイマーを0からスタートさせる。そして、ステップS104に進む。
ステップS104では、フラッグF1=0に設定する。そして、ステップS105に進む。
ステップS105では、制御対象となる目標吸入圧力Pssを設定する。そして、ステップS106に進む。
【0084】
ステップS106では、制御電流Iを演算する。詳しくは、詳しくは、制御電流Iは次式(16)により求められる。なお、式(16)は、式(14)において、電磁力F(I)を電流の1次関数とおいて変形したものである(b1、b2は定数)。
I=b1・(Pd−Pss)+b2・・・(16)
そして、ステップS107に進む。
【0085】
ステップS107では、制御電流Iが所定値I3以上であるか否かを判別する。所定値I3以上である場合は、ステップS110に進む。
ステップS110では、制御電流Iが所定値I4以下であるか否かを判別する。所定値I4以下である場合は、ステップS109に進む。
ステップS109では、制御電流Iを出力する。そしてステップS101に戻る。
【0086】
一方、ステップS107において制御電流Iが所定値I3未満であると判定した場合は、ステップS108に進む。
ステップS108では、所定値I3をIとして設定する。そして、ステップS109に進む。
ステップS110において制御電流Iが所定値I4より大きいと判定した場合は、ステップS111に進む。
【0087】
ステップS111では、所定値I4をIとして設定する。そしてステップS109に進む。
ステップS102において、フラッグF1=0でない(F1=1である)と判定した場合は、ステップS112に進む。
ステップS112では、タイマー値tが所定値t1以下であるか否かを判別する。タイマー値tが所定値t1以下である場合は、ステップS106に進む。タイマー値tが所定値t1より大きい場合はステップS113に進む。
【0088】
ステップS113では、タイマーをリセットし、t=0に設定する。そして、ステップS114に進む。
ステップS114では、フラッグF1=0に設定する。そして、ステップS106に進む。
以上の制御により、所定の目標吸入圧力Pssを維持するように常時吐出圧力Pdを読み込み、変動する吐出圧力Pdに応じて制御電流Iを、I3からI4の範囲内で調整するものである。目標吸入圧力Pssは所定時間t1毎に更新される。
【0089】
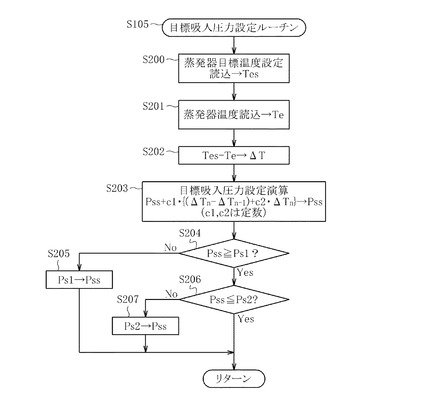
図14は、図13でのステップS105における目標吸入圧力Pssの設定手順を示すフローチャートである。
ステップS105の目標吸入圧力Pssの設定サブルーチンが実行されると、まず、ステップS200として、蒸発器目標温度設定手段401で設定された蒸発器出口空気温度の目標値Tesを読み込む。そして、ステップS201に進む。
【0090】
ステップS201では、蒸発器温度センサ402により検出した蒸発器出口空気温度Teを読み込む。そして、ステップS202に進む。
ステップS202では、ステップS200で読み込んだ蒸発器出口空気温度の目標値TesとステップS201で読み込んだ蒸発器出口空気温度との偏差ΔT(=Tes−Te)を演算する。そして、ステップS203に進む。
【0091】
ステップS203では、目標吸入圧力Pssを演算する。詳しくは、目標吸入圧力Pssは式(17)により求められる。なお、式(17)におけるc1、c2は定数であり、あらかじめ適宜設定される。
Pssn=Pssn−1+c1・[(ΔTn−ΔTn−1)+c2・ΔTn]・・・(17)
そして、ステップ204に進む
ステップS204では、ステップS203で演算された目標吸入圧力Pssが所定値Ps1以上であるか否かを判別する。所定値Ps1以上である場合は、ステップS206に進む。
【0092】
ステップS206では、ステップS203で演算された目標吸入圧力Pssが所定値Ps2以下であるか否かを判別する。所定値Ps2以下である場合は、本ルーチンを終了して、メインルーチンへ戻る。
一方、ステップS204において目標吸入圧力Pssが所定値Ps1未満であると判定した場合は、ステップS205に進む。
【0093】
ステップS205では、所定値Ps1を目標吸入圧力Pssとして書き換える。そして本ルーチンを終了して、メインルーチンへ戻る。
ステップS206において目標吸入圧力Pssが所定値Ps2より大きいと判定した場合、ステップS207に進む。
ステップS207では、所定値Ps2を目標吸入圧力Pssとして書き換える。そして本ルーチンを終了して、メインルーチンへ戻る。
【0094】
以上のように、目標吸入圧力設定手段451では、蒸発器目標温度設定手段で設定された目標温度Tesと蒸発器温度センサ402で検知された温度Teとの差に基づいて目標吸入圧力Pssを設定し、蒸発器出口空気温度Teが目標温度Tesに近づくように目標吸入圧力Pssを演算して、吐出容量を制御するものである。目標吸入圧力Pssは予め定められた範囲内(Ps1≦Pss≦Ps2)で設定される。なお、目標温度Tesは車室内の空調状態に応じて変更される。
【0095】
第3実施形態では、第2実施形態と同様に、吐出圧力Pdと吸入圧力Psから冷媒循環量を演算するため、圧縮機100側の圧力変化に同期して冷媒循環量が演算可能となり、圧縮機100の駆動トルクの演算精度向上に寄与する。
図15は、本発明の第4実施形態のエアコンECU480の構成を示したブロック図である。
【0096】
本発明の第4実施形態のエアコンECU480は、上述した第2実施形態のエアコンECU420をベースとし、目標吸入圧力設定手段481において、空調制御を実行する第1制御モードと、トルク制御を実行する第2制御モードを備えていることを特徴とする。
本実施形態の圧縮機100は、第1実施形態の圧縮機100と同一の構成である。容量制御弁300は、第1実施形態の容量制御弁300と同一の構造ではあるが、吸入圧力Pdを受圧するベローズ303の有効面積Sbを容量制御弁300のものより大幅に小さく設定している。
【0097】
図16は、第4実施形態の容量制御弁300でのソレノイドの通電量と吸入圧力との関係を示すグラフである。
図16に示すように、第4実施形態では、吸入圧力制御範囲が大幅に拡大される。したがって、殆どの運転条件で吐出容量制御が可能となる。
第4実施形態の目標吸入圧力設定手段481は、蒸発器目標温度設定手段で設定された目標温度Tesと蒸発器温度センサ402で検知された温度Teとの偏差を演算し、この偏差が縮小するように目標吸入圧力Pssを演算して制御電流Iを制御する第1制御(空調制御)モードを有する。第1制御モードの制御フローは、上述した図6に示す制御フローと同一である。
【0098】
さらに、目標吸入圧力設定手段481は、エンジンECU500から指令される目標トルクTrsと、トルク演算手段421で演算された駆動トルクTrとの偏差を演算し、この偏差を縮小するように目標吸入圧力つまり制御電流Iを設定する第2制御(トルク制御)モードを有する。制御電流Iは、予め定められた範囲内(I1≦I≦I2)で設定される。
図17は、第2制御モードでの制御手順を示すフローチャートである。
【0099】
図17に示すように、第2制御モードが実行開始すると、ステップS300では、目標トルク設定手段406で設定された目標トルクTrsを読み込む。そして、ステップS301に進む。
ステップS301では、前述の式(7)により駆動トルクTrを演算する。そして、ステップS302に進む。
【0100】
ステップS302では、ステップ301で読み込んだ目標トルクTrsとステップS302で読み込んだ駆動トルクTrとの差ΔTrを求める。そして、ステップS303に進む。 ステップS303では、制御電流Iを演算する。詳しくは、制御電流I(In)は式(18)により求められる。なお、式(18)において、d1、d2は定数であり、適宜設定される。
In=In−1+d1・[(ΔTrn−ΔTrn−1)+d2・ΔTrn]・・・(18)
そして、ステップS304に進む。
【0101】
ステップS304では、ステップS303で求められた制御電流Iが所定値I1以上であるか否かを判別する。所定値I1以上である場合は、ステップS305に進む。
ステップS305では、制御電流Iが所定値I2以下であるか否かを判別する。所定値I2以下である場合は、ステップS306に進む。
ステップS306では、制御電流Iをソレノイド駆動手段411に出力する。そして本ルーチンを終了してメインルーチンに戻る。
【0102】
一方、ステップS304において制御電流Iが所定値I1未満であると判定した場合は、ステップS307に進む。
ステップS307では、所定値I1を制御電流Iとして書き換える。そしてステップS306に進む。
ステップS305において制御電流Iが所定値I2より大きいと判定した場合、ステップS308に進む。
【0103】
ステップS308では、所定値I2を制御電流Iとして書き換える。そしてステップS306に進む。
以上のように、目標トルクTrsと駆動トルクTrとの差が縮小するようにPI制御により制御電流Iを演算する。制御電流Iは予め定められた上下限の範囲(I1≦I≦I2)で設定される。
【0104】
目標吸入圧力設定手段481には、例えばエアコンスイッチ409のON/OFF設定、車両の加速情報(例えばアクセル開度センサ408から入力したアクセル開度、スロットル開度等)、エンジン回転速度情報が入力され、図18に示すように、これらの情報が所定の条件を満たすときに、第2制御モード(トルク制御)を選択し、それ以外のときは第1制御モード(空調制御)を選択する。
【0105】
図18は、目標吸入圧力設定手段481でのモード切替制御手順を示すフローチャートである。
本ルーチンでは、ステップS400において、上記起動判定、加速判定及びアイドリング判定を実行する。詳しくは、以下の条件1)〜3)を満たすか否かを判定する。
1)エアコンスイッチ409がOFFからONに切り換えられたか(起動判定)。
2)車両が加速状態であるか、例えばアクセル開度が所定値以上か(加速判定)。
3)車両がアイドリング状態であるか、例えば、アクセル開度ゼロでエンジン回転速度が所定値以下か(アイドリング判定)。そして、ステップS401に進む。
【0106】
ステップS401では、ステップS400における起動判定、加速判定及びアイドリング判定の条件をいずれか1つでも満たしていた(ONである)場合は、ステップS402に進む。
ステップS402では、第2制御モードを実行する。そして、本ルーチンをリターンする。
【0107】
一方、ステップS401において、ステップS400における各条件がいずれも満たされていない場合は、ステップS403に進む。
ステップS403では、第1制御モードを実行する。そして、本ルーチンをリターンする。
以上により、第4実施形態によれば、圧縮機100の駆動トルクが所定値になるように、吐出容量制御ができるため、エンジン負荷の状況に応じて圧縮機100のトルクを調整でき、エンジンとの協調制御が可能となる。なお、トルク制御は第4実施形態に限定されず、図9〜図14に示す第3実施形態をベースとしても実行可能であり、その他の外部信号により吐出容量制御が可能な可変容量圧縮機でも実行できる。
【0108】
また、本実施形態では目標トルクTrsはエンジンECU500から指令されるとしたが、例えばエンジンECU側の負荷情報をエアコンECU480が受けて目標トルクTrsを設定してもよい。また、エアコンECU480が目標トルクTrsを設定し、その目標トルクTrsをエンジンECU500に出力してもよい。
また蒸発器目標温度設定手段401で設定された目標温度Tesと、蒸発器温度センサ402で検知された実際の温度Teとの偏差を演算し、この偏差を縮小するように目標トルクを設定して空調制御を行ってもよい。
【0109】
本発明は、以上の実施形態に限定されるものではなく、種々の変形が可能である。
例えば、以上の実施形態では、冷凍サイクルの膨張装置20として、固定オリフィスが用いられているが、可変オリフィス、温度膨張弁、電子制御弁等の弁機構を備えた膨張装置にしてもよい。この場合、弁機構の開口面積が変化するため、式(8)の係数Kは、開口面積の関数となるが、例えば熱負荷情報(外気温度、蒸発器ブロワ電圧、Pd、Ps、Pd−Ps等)や圧縮機回転速度センサ等の既存のセンサで検出可能とされる情報を代用変数として演算してもよい。
【0110】
また、式(8)の係数Kを膨張装置の流量係数の関数としてもよい。また、弁機構を備えた膨張装置においては流量係数を開口面積に応じて変化させてもよい。また、係数Kを開口面積、流量係数以外の変数の関数として演算した冷媒循環量と実際の冷媒循環量とが一致するように補正してもよい。
高圧圧力センサや低圧圧力センサの代わりに温度センサを用いて、温度情報から間接的に膨張装置の入口圧力及び出口圧力を検知してもよい。これにより、センサのコストを低減することができる。
【0111】
膨張装置の入口出口の圧力差に応答する弁機構と、弁機構に電磁力を作用させるソレノイドを備えた膨張装置を使用し、膨張装置の入口出口の圧力差を、膨張装置のソレノイドの通電量またはこれに相当する制御信号を用いて演算してもよい。
膨脹装置の入口冷媒密度を膨脹装置の入口温度から演算してもよい。
また、二酸化炭素を冷媒とする冷凍サイクルのように、冷媒を超臨界状態にして運転するものでは、膨脹装置の入口冷媒密度を膨脹装置の入口温度と膨脹装置の入口圧力とから演算してもよい。また、膨脹装置の入口の冷媒密度を膨脹装置の入口圧力から演算してもよい。
【0112】
圧縮器の駆動トルク演算式は変数として、少なくとも膨脹装置を通過する冷媒質量流量を変数として含んでいればよく、式(7)に限定されない。また、式(7)から機械効率ηmを削除して、機械損失に相当する項を式(7)に負荷してもよい。
第2実施形態及び第3実施形態においては、Psは制御電流の関数として演算されるが、例えば最大吐出容量で動作している状態では、実際のPsが制御電流から演算されたPsより大きくなる場合が想定される。このような場合トルク演算精度が悪化するので、例えば最大吐出容量状態での吐出圧力Psを推定して制御電流Iから演算された吐出圧力Psと比較し、最大吐出容量か吐出容量制御状態か判定し、その判定結果により最大吐出容量状態でのトルク演算式または吐出容量制御状態のトルク演算式を選択するという方法を行なってもよい。
【0113】
あるいは、制御電流Iから演算された吐出圧力Psが、推定された最大吐出容量状態でのP吐出圧力Psより低ければ、最大吐出容量状態での吐出圧力Psに相当する制御電流に変更して実際の吐出圧力Psと一致させる方法を行ってもよい。
熱負荷情報としては、上記実施形態のように外気温度Taや蒸発器ブロワ電圧を採用する他に、外気湿度、高圧領域の圧力及び温度、低圧領域の圧力及び温度、高圧領域と低圧領域との圧力差、日射量、エアコン各種設定(エアコンON/OFF設定、内外気切換ドア位置、社内温度設定、吹き出し口位置、エアミックスドア位置)、車内温度/湿度、蒸発器入口空気温度及び湿度、蒸発器の冷却状態を表す温度/圧力等を採用してもよい。これらを多く用いることで、精度の向上を図ることができる。
【0114】
圧縮機回転速度は、エンジン回転速度を検知して演算したが、直接圧縮機回転速度を検知すること、また車速とギヤシフト位置から間接的に演算してもよい。
また、本発明の構成をエアコンECUとコンプECUあるいはエンジンECU内に設けてもよい。
以上の実施形態では、圧縮機として、斜板式のクラッチレス可変容量圧縮機を採用したが、これに限らず、例えば固定容量圧縮機、スクロールあるいはベーン構造の可変容量圧縮機等、種々の構造の圧縮機に本発明を適用することができる。
【0115】
また、冷媒としては、R134aに限定されず、二酸化炭素やその他の新冷媒を使用してもよい。
【図面の簡単な説明】
【0116】
【図1】車両用エアコンシステムの冷凍サイクルの概略構成図である。
【図2】圧縮機の構造を示す断面図である。
【図3】本発明の第1実施形態に係る容量制御弁の構造を示す断面図である。
【図4】ソレノイドの通電量と吸入圧力との関係を示すグラフである。
【図5】第1実施形態のエアコンECUの構成を示すブロック図である。
【図6】制御電流Iの設定制御手順を示すフローチャートである。
【図7】ソレノイド駆動手段の詳細構成図である。
【図8】第2実施形態のエアコンECUの構成を示すブロック図である。
【図9】第3実施形態での圧縮機の構造を示す断面図である。
【図10】第3実施形態での容量制御弁の構造を示す断面図である。
【図11】制御電流と吸入圧力との関係を示すグラフである。
【図12】第3実施形態のエアコンECUの構成を示すブロック図である。
【図13】エンジンECUでの制御電流の設定手順を示すフローチャートである。
【図14】目標吸入圧力Pの設定手順を示すフローチャートである。
【図15】第4実施形態のエアコンECUの構成を示すブロック図である。
【図16】第4実施形態でのソレノイドの通電量と吸入圧力との関係を示すグラフである。
【図17】第2制御モードでの制御手順を示すフローチャートである。
【図18】モード切替制御手順を示すフローチャートである。
【符号の説明】
【0117】
1 冷凍サイクル
10 放熱器
20 膨脹装置
30 蒸発器
100 圧縮機
105 クランク室
107 斜板
117 ピストン
119 吸入室
120 吐出室
300 容量制御弁
304a 弁体
314 ソレノイド
400 エアコンECU
402 蒸発器温度センサ
403 高圧圧力センサ
404 低圧圧力センサ
405 エンジン回転速度センサ
406 外気温度センサ
500 エンジンECU
【特許請求の範囲】
【請求項1】
圧縮機、放熱器、膨張装置、蒸発器を順次接続してなる冷凍サイクルに適用される圧縮機の駆動トルク演算装置であって、
前記膨張装置を通過する冷媒の質量流量を変数として含む演算式により前記圧縮機の駆動トルクを演算することを特徴とする圧縮機の駆動トルク演算装置。
【請求項2】
前記膨張装置を通過する冷媒の質量流量Grは次式により演算されることを特徴とする請求項1に記載の圧縮機の駆動トルク演算装置。
【数1】
ここで、ρは前記膨張装置の入口冷媒密度、Pexp1は前記膨張装置の入口圧力、Pexp2は前記膨張装置の出口圧力、Kは係数である。
【請求項3】
前記駆動トルクを演算する演算式は、更に前記圧縮機の吐出圧力領域の圧力、吸入圧力領域の圧力及び前記圧縮機の回転速度を変数として含むことを特徴とする請求項2に記載の圧縮機の駆動トルク演算装置。
【請求項4】
前記冷凍サイクルの高圧領域での圧力である高圧圧力を検出する高圧圧力検知手段が備えられ、前記膨張装置の入口圧力は前記高圧圧力検知手段により検知された高圧圧力を変数として演算されることを特徴とする請求項2または3に記載の圧縮機の駆動トルク演算装置。
【請求項5】
前記高圧圧力検知手段は前記高圧領域におけるガス領域に設置されていることを特徴とする請求項4に記載の圧縮機の駆動トルク演算装置。
【請求項6】
前記冷凍サイクルの低圧領域での圧力である低圧圧力を検知する低圧圧力検知手段が備えられ、前記膨張装置の出口圧力は前記低圧圧力検知手段により検知された低圧圧力を変数として演算されることを特徴とする請求項2〜5のいずれか1つに記載の圧縮機の駆動トルク演算装置。
【請求項7】
前記圧縮機は、冷媒が吸入される吸入圧力領域と、該吸入された冷媒を圧縮する圧縮機構と、該圧縮機構により圧縮された冷媒が吐出される吐出圧力領域と、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量機構と、該可変容量機構を作動させる制御圧力を蓄える制御圧力室と、前記吸入圧力領域の圧力を検知する検知部材を有する弁機構と前記弁機構に電磁力を作用させるソレノイドとから構成されて前記制御圧力室の圧力を変更する容量制御弁とを具備し、外部情報検知手段により検知された外部情報に基づいて前記容量制御弁の開度を調整し、前記制御圧力室の圧力を変化させて前記可変容量機構を作動させ、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量圧縮機であって、
前記検知部材が前記低圧圧力検知手段を構成し、前記吸入圧力領域の圧力は前記ソレノイドの通電量またはこれに相当する制御信号を変数として演算され、該演算された前記吸入圧力領域の圧力を変数として前記膨張装置の出口圧力が演算されることを特徴とする請求項6に記載の圧縮機の駆動トルク演算装置。
【請求項8】
前記圧縮機は、冷媒が吸入される吸入圧力領域と、該吸入された冷媒を圧縮する圧縮機構と、該圧縮機構により圧縮された冷媒が吐出される吐出圧力領域と、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量機構と、該可変容量機構を作動させる制御圧力を蓄える制御圧力室と、前記吐出圧力領域の圧力を受ける第1受圧面と、該第1受圧面に作用する前記吐出圧力領域の圧力と対向する方向に前記吸入圧力領域の圧力を受ける第2受圧面とが形成された感圧部材を有する弁機構と、前記感圧部材に作用する前記吐出圧力領域の圧力による力と対抗する方向に前記弁機構に電磁力を作用させるソレノイドとから構成されて前記制御圧力室の圧力を変更する容量制御弁とを具備し、外部情報を検知する外部情報検知手段により検知された外部情報に基づいて前記容量制御弁の開度を調整し、前記制御圧力室の圧力を変化させて前記可変容量機構を作動させ、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量圧縮機であって、
前記吸入圧力領域の圧力は前記高圧圧力検知手段により検知された高圧圧力及び前記ソレノイドの通電量またはこれに相当する制御信号とを変数として演算され、該演算された前記吸入圧力領域の圧力を変数として前記膨張装置の出口圧力が演算されることを特徴とする請求項2〜5のいずれか1つに記載の圧縮機の駆動トルク演算装置。
【請求項9】
前記膨張装置の入口圧力及び前記膨張装置の出口圧力を演算する演算式は、更に前記冷凍サイクルの熱負荷情報及び前記圧縮機の回転速度の少なくともいずれか1つの外部情報を変数として演算されることを特徴とする請求項4〜8のいずれか1つに記載の圧縮機の駆動トルク演算装置。
【請求項10】
前記膨張装置の入口冷媒密度は、前記膨張装置の入口冷媒温度及び前記高圧圧力検知手段により検知された高圧圧力の少なくともいずれか1つを変数として演算されることを特徴とする請求項2〜9のいずれか1つに記載の圧縮機の駆動トルク演算装置。
【請求項11】
前記膨張装置は弁機構を有し、前記係数Kは前記弁機構の開口面積を変数として演算され、前記弁機構の開口面積は前記冷凍サイクルの熱負荷情報及び前記圧縮機の回転数の少なくともいずれか1つの外部情報を変数として演算されることを特徴とする請求項2〜10のいずれか1つに記載の圧縮機の駆動トルク演算装置。
【請求項12】
前記圧縮機は外部駆動源により駆動され、前記駆動トルク演算装置は、演算した前記圧縮機の駆動トルクを前記外部駆動源の制御装置に出力することを特徴とする請求項1〜11のいずれか1つに記載の圧縮機の駆動トルク演算装置。
【請求項13】
冷媒が吸入される吸入圧力領域と、該吸入された冷媒を圧縮する圧縮機構と、該圧縮された冷媒が吐出される吐出圧力領域と、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量機構と、当該可変容量機構を作動させる制御圧力を蓄える制御圧力室と、前記制御圧力室の圧力を変更する容量制御弁とを具備し、外部情報を検知する外部情報検知手段により検知された外部情報に基づいて前記容量制御弁の開度を調整し、前記制御圧力室の圧力を変化させて前記可変容量機構を作動させ、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量圧縮機の容量制御システムであって、
前記容量制御システムは、請求項1〜12のいずれか1項に記載の駆動トルク演算装置
と、前記圧縮機の吐出容量制御の目標となる駆動トルクを設定する目標トルク設定手段とを備え、前記駆動トルク演算装置で演算された前記圧縮機の駆動トルクが、前記目標トルク設定手段で設定された目標トルクに近づくように前記容量制御弁の開度を調整することを特徴とする可変容量圧縮機の容量制御システム。
【請求項1】
圧縮機、放熱器、膨張装置、蒸発器を順次接続してなる冷凍サイクルに適用される圧縮機の駆動トルク演算装置であって、
前記膨張装置を通過する冷媒の質量流量を変数として含む演算式により前記圧縮機の駆動トルクを演算することを特徴とする圧縮機の駆動トルク演算装置。
【請求項2】
前記膨張装置を通過する冷媒の質量流量Grは次式により演算されることを特徴とする請求項1に記載の圧縮機の駆動トルク演算装置。
【数1】
ここで、ρは前記膨張装置の入口冷媒密度、Pexp1は前記膨張装置の入口圧力、Pexp2は前記膨張装置の出口圧力、Kは係数である。
【請求項3】
前記駆動トルクを演算する演算式は、更に前記圧縮機の吐出圧力領域の圧力、吸入圧力領域の圧力及び前記圧縮機の回転速度を変数として含むことを特徴とする請求項2に記載の圧縮機の駆動トルク演算装置。
【請求項4】
前記冷凍サイクルの高圧領域での圧力である高圧圧力を検出する高圧圧力検知手段が備えられ、前記膨張装置の入口圧力は前記高圧圧力検知手段により検知された高圧圧力を変数として演算されることを特徴とする請求項2または3に記載の圧縮機の駆動トルク演算装置。
【請求項5】
前記高圧圧力検知手段は前記高圧領域におけるガス領域に設置されていることを特徴とする請求項4に記載の圧縮機の駆動トルク演算装置。
【請求項6】
前記冷凍サイクルの低圧領域での圧力である低圧圧力を検知する低圧圧力検知手段が備えられ、前記膨張装置の出口圧力は前記低圧圧力検知手段により検知された低圧圧力を変数として演算されることを特徴とする請求項2〜5のいずれか1つに記載の圧縮機の駆動トルク演算装置。
【請求項7】
前記圧縮機は、冷媒が吸入される吸入圧力領域と、該吸入された冷媒を圧縮する圧縮機構と、該圧縮機構により圧縮された冷媒が吐出される吐出圧力領域と、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量機構と、該可変容量機構を作動させる制御圧力を蓄える制御圧力室と、前記吸入圧力領域の圧力を検知する検知部材を有する弁機構と前記弁機構に電磁力を作用させるソレノイドとから構成されて前記制御圧力室の圧力を変更する容量制御弁とを具備し、外部情報検知手段により検知された外部情報に基づいて前記容量制御弁の開度を調整し、前記制御圧力室の圧力を変化させて前記可変容量機構を作動させ、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量圧縮機であって、
前記検知部材が前記低圧圧力検知手段を構成し、前記吸入圧力領域の圧力は前記ソレノイドの通電量またはこれに相当する制御信号を変数として演算され、該演算された前記吸入圧力領域の圧力を変数として前記膨張装置の出口圧力が演算されることを特徴とする請求項6に記載の圧縮機の駆動トルク演算装置。
【請求項8】
前記圧縮機は、冷媒が吸入される吸入圧力領域と、該吸入された冷媒を圧縮する圧縮機構と、該圧縮機構により圧縮された冷媒が吐出される吐出圧力領域と、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量機構と、該可変容量機構を作動させる制御圧力を蓄える制御圧力室と、前記吐出圧力領域の圧力を受ける第1受圧面と、該第1受圧面に作用する前記吐出圧力領域の圧力と対向する方向に前記吸入圧力領域の圧力を受ける第2受圧面とが形成された感圧部材を有する弁機構と、前記感圧部材に作用する前記吐出圧力領域の圧力による力と対抗する方向に前記弁機構に電磁力を作用させるソレノイドとから構成されて前記制御圧力室の圧力を変更する容量制御弁とを具備し、外部情報を検知する外部情報検知手段により検知された外部情報に基づいて前記容量制御弁の開度を調整し、前記制御圧力室の圧力を変化させて前記可変容量機構を作動させ、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量圧縮機であって、
前記吸入圧力領域の圧力は前記高圧圧力検知手段により検知された高圧圧力及び前記ソレノイドの通電量またはこれに相当する制御信号とを変数として演算され、該演算された前記吸入圧力領域の圧力を変数として前記膨張装置の出口圧力が演算されることを特徴とする請求項2〜5のいずれか1つに記載の圧縮機の駆動トルク演算装置。
【請求項9】
前記膨張装置の入口圧力及び前記膨張装置の出口圧力を演算する演算式は、更に前記冷凍サイクルの熱負荷情報及び前記圧縮機の回転速度の少なくともいずれか1つの外部情報を変数として演算されることを特徴とする請求項4〜8のいずれか1つに記載の圧縮機の駆動トルク演算装置。
【請求項10】
前記膨張装置の入口冷媒密度は、前記膨張装置の入口冷媒温度及び前記高圧圧力検知手段により検知された高圧圧力の少なくともいずれか1つを変数として演算されることを特徴とする請求項2〜9のいずれか1つに記載の圧縮機の駆動トルク演算装置。
【請求項11】
前記膨張装置は弁機構を有し、前記係数Kは前記弁機構の開口面積を変数として演算され、前記弁機構の開口面積は前記冷凍サイクルの熱負荷情報及び前記圧縮機の回転数の少なくともいずれか1つの外部情報を変数として演算されることを特徴とする請求項2〜10のいずれか1つに記載の圧縮機の駆動トルク演算装置。
【請求項12】
前記圧縮機は外部駆動源により駆動され、前記駆動トルク演算装置は、演算した前記圧縮機の駆動トルクを前記外部駆動源の制御装置に出力することを特徴とする請求項1〜11のいずれか1つに記載の圧縮機の駆動トルク演算装置。
【請求項13】
冷媒が吸入される吸入圧力領域と、該吸入された冷媒を圧縮する圧縮機構と、該圧縮された冷媒が吐出される吐出圧力領域と、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量機構と、当該可変容量機構を作動させる制御圧力を蓄える制御圧力室と、前記制御圧力室の圧力を変更する容量制御弁とを具備し、外部情報を検知する外部情報検知手段により検知された外部情報に基づいて前記容量制御弁の開度を調整し、前記制御圧力室の圧力を変化させて前記可変容量機構を作動させ、前記圧縮機構から吐出される冷媒の吐出容量を調整する可変容量圧縮機の容量制御システムであって、
前記容量制御システムは、請求項1〜12のいずれか1項に記載の駆動トルク演算装置
と、前記圧縮機の吐出容量制御の目標となる駆動トルクを設定する目標トルク設定手段とを備え、前記駆動トルク演算装置で演算された前記圧縮機の駆動トルクが、前記目標トルク設定手段で設定された目標トルクに近づくように前記容量制御弁の開度を調整することを特徴とする可変容量圧縮機の容量制御システム。
【図1】


【図2】
【図3】

【図4】

【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2009−63179(P2009−63179A)
【公開日】平成21年3月26日(2009.3.26)
【国際特許分類】
【出願番号】特願2007−228938(P2007−228938)
【出願日】平成19年9月4日(2007.9.4)
【出願人】(000001845)サンデン株式会社 (1,791)
【Fターム(参考)】
【公開日】平成21年3月26日(2009.3.26)
【国際特許分類】
【出願日】平成19年9月4日(2007.9.4)
【出願人】(000001845)サンデン株式会社 (1,791)
【Fターム(参考)】
[ Back to top ]