
圧縮機
【課題】 複数のセンサからの信号に基づいて圧縮機の運転制御を行う制御装置を備えた圧縮機において,センサ毎に異常の程度を判定し,異常の程度及びセンサに関連する要素,例えば運転上の重要性等に鑑みて,異常の補正もしくは圧縮機の停止といった制御を適切に行うことが可能な圧縮機を提供すること。
【解決手段】 センサによる検出値と予め定められた規定値とを比較して異常の程度を判定し,前記センサに関連する要素を判別すると共に,前記センサの異常の程度及び前記センサに関連する要素に応じて運転制御を行う圧縮機として構成されている。
【解決手段】 センサによる検出値と予め定められた規定値とを比較して異常の程度を判定し,前記センサに関連する要素を判別すると共に,前記センサの異常の程度及び前記センサに関連する要素に応じて運転制御を行う圧縮機として構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は,圧縮機の制御に関するものであり,特に圧縮機の運転に関する信頼性を確保するための新しい機能に関するものである。
【背景技術】
【0002】
圧縮機には,安定した圧力及び温度の圧縮ガスを供給先に供給することが求められる。前記圧縮機は工場などのユーティリティー設備として利用され,上述したような安定した圧力及び温度の圧縮ガスの供給が果たせないと,工場の稼動に支障をきたす。従って前記圧縮機では吸い込み側及び吐出側に,圧力を検知するための圧力センサ,温度を検出するための温度センサといった種々のセンサが設置され,また,圧縮機には制御装置が設けられており,前記センサによる検出値は定期的に前記制御装置へと送られ,前記制御装置はそれらの検出値を基に前記圧縮機の運転制御を行う。更に近年は圧縮機の高機能化に伴い,運転上必要なセンサに加え,データ処理や保守管理を便利にするためのセンサも装備されるようになりつつある。
【0003】
前述のとおり,前記圧縮機の運転制御は種々のセンサによる検出値に従って行われるため,センサの検出値には高い精度が求められる。例えば,前記圧縮機の吐出側に設置された圧力センサが,実際の圧力よりも低い圧力を検知した場合には,前記圧力センサから送られてきた実際の圧力よりも低い圧力のデータに従って制御装置による前記圧縮機の運転制御が行われ,前記圧縮機は所望の圧力よりも高い圧力のガスを吐出しようとする。所望の圧力より高い圧力のガスを吐出すると,前記圧縮機を駆動する電動機は過負荷になり,その状態が継続されると電動機コイルの焼損や軸受けの破損を引き起こす不具合が生じる。
逆に実際の圧力よりも高い圧力を検知した場合には,前記圧縮機は所望の圧力よりも低い圧力のガスを吐出しようとする。この場合は前記圧縮機により圧縮されたガスを使用する側の機器に異常が生じることになる。
上述のように,前記圧縮機で用いられる種々のセンサには常に良好な精度が求められるため,センサ自体の異常の判定や,検出値の狂い等の異常が発見された場合に,センサの検出値を補正することは,圧縮機を稼動する上で非常に重要な作業である。
センサの異常を判定する手法としては,センサから前記制御部への検出値の転送が途絶えた場合をセンサの異常と判定する手法が,従来から広く知られ,用いられている。ところがこの手法は,センサの完全な故障や,センサから制御装置までを結ぶ信号線の断線といった事態のみを異常と判定するものでしかない。従ってセンサの検出値に誤差が生じた場合でも,異常との判定がなされないまま運転が継続されることになり,センサの異常を判定する手法としては不十分であることがわかる。
そこで検出器の精度の確認及び補正を行う手法として,特許文献1が知られている。特許文献1では,二つの受圧部に加わる圧力の差を検知し,圧力の差に相当する出力DC電圧を出力する差圧センサに対して,一方の重圧部には検出圧Aを印加し,他方の受圧部には切替弁により検出圧A又は検出圧Bのいずれかを切替えて印加できるようにし,前記二つの受圧部に検出圧Aを印加して強制的に差圧ゼロの状態を作り出し,このときの差圧センサの出力DC電圧をセンサ出力の誤差出力信号電圧とすることを特徴とする圧力センサ補正装置と,それを適用した送風機制御装置を開示している。
【特許文献1】特許第2751756号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら,特許文献1は差圧センサに関する補正を開示するのみで,差圧センサ以外の補正手段については開示されていない。また,切替弁を用いているので装置全体が大型化してしまう問題点がある。
また,検出器の検出誤差が余りにも大きいと,より根本的な故障が検出器に発生していると判断せねばならない。その場合は前記検出器の検出値を補正するのでは不十分であり,一旦圧縮機を停止させ,検出器の修理もしくは交換などを行わねばならない。
さらに,圧縮機には圧縮機の運転上必要不可欠なセンサとそうでないセンサがあり,後者のセンサで異常があった場合でも圧縮機を停止させると,圧縮機の運転維持に関する信頼性や効率が低下する。また,運転上必要不可欠なセンサに関しても,検出値の誤差が圧縮機の信頼性に影響を与えない程度に小さければ,検出値の補正を行うのみで十分である。従って検出値の小さな誤差で圧縮機の停止を行うと,やはり圧縮機の運転維持に関する信頼性が低下する。また圧縮機を停止させ,センサを検査する際に,その検査結果やセンサの重要度に応じてセンサの補正を行うか,また補正を行わず補正の必要性を示した警告を発するか,等の異なった対応を行うことが圧縮機の管理上好ましいが,従来技術ではそのような細かな対応がなされていない。
従って,本発明は上記事情に鑑みてなされたものであり,その目的とするところは,センサ毎に異常の程度を判定し,異常の程度及びセンサに関連する要素,例えば運転上の重要性等に鑑みて,異常の補正もしくは圧縮機の停止といった制御を適切に行うことが可能な圧縮機を提供することにある。
【課題を解決するための手段】
【0005】
上記目的を達成するために本発明は,センサによる検出値と予め定められた規定値とを比較して異常の程度を判定し,前記センサに関連する要素を判別すると共に,前記センサの異常の程度及び前記センサに関連する要素に応じて運転制御を行う圧縮機として構成されている。
前記規定値を複数段階に設定しておき,前記複数段階に設定された前記規定値と,前記センサによる検出値を比較することにより前記センサの異常の程度を判定することが考えられる。例えば,前記規定値が第1〜第3の3段階の範囲を規定するものであり,異常程度判定手段が,前記センサからの検出値が前記第1の範囲にあるときはセンサに異常なしとし,前記第2の範囲にあるときは軽異常とし,前記第3の範囲にあるときは重異常と判定する構成が考えられる。また,前記センサに関連する要素の具体例として,前記センサが前記圧縮機の運転上の重要性であることが考えられる。
【0006】
前記圧縮機の停止後から所定時間の経過を検知した後に,前記センサによる検出値と前記規定値とを比較して異常の程度の判定を行い,同様に前記センサに関連する要素を判別する場合が考えられる。
前記所定時間は,前記圧縮機の吸い込み側もしくは吐出側の圧力を検出する圧力センサによる検出値が,予め定められた所定の値になるのを検知したことで経過したものと考えても良い。また,前記圧縮機の回転数を検出する回転数センサによる検出値がゼロ値になるのを検知することにより,所定時間の経過を検知しても良い。同様に前記圧縮機を駆動する電動モータに通電する電流値を検出する電流センサによる検出値がゼロ値になるのを検知することにより,所定時間の経過を検知するものであっても良い。
【0007】
前記センサの異常の程度及び前記センサの重要性に応じた前記圧縮機の運転制御として,例えば,前記センサが軽異常と判定された場合,または前記センサが重異常と判定された場合であって,且つ該センサが重要なセンサでないと判別された場合に,前記制御装置が該センサの検出値が補正されるものであるのが望ましい。また,前記センサが重異常と判定された場合であって,且つ重要なセンサであると判別された場合に,前記圧縮機の運転停止を継続するのが望ましい。
【0008】
また,前記センサの検査が前記圧縮機の運転中に行われる場合も考えられる。このようなとき,前記圧縮機が前記センサの検査結果を記憶しておくための判定結果記憶手段を有する場合が考えられる。例えば,前記圧縮機の運転中に行われる検査によって,前記センサが軽異常であると判定された場合に,または前記センサが重異常と判定された場合であって,且つ該センサが前記圧縮機の運転上必要不可欠なセンサでないと判別された場合に,前記判定結果記憶手段にそれらの検査結果が記録され,前期判定結果記憶手段に記憶された判定結果に従って,前記圧縮機の運転停止中に該センサの検出値を補正する場合が考えられる。
【0009】
また,前記センサが重異常と判定された場合であって,且つ該センサが前記圧縮機の運転上必要不可欠なセンサであると判別された場合に,前記圧縮機が運転している場合には前記圧縮機の運転の停止を行うのが望ましい。更に,検査時には前記センサとは同種の予備センサを前記圧縮機に装着し,当該予備センサの検出値に従って前記センサの検査を行う場合も考えられる。
【発明の効果】
【0010】
本発明によれば,前記センサ毎に異常の程度を判定することが可能であり,前記センサ毎の異常の程度,及び前記圧縮機の運転における前記センサ毎の関連要素を考慮した上で,例えば,重要性の高いセンサに大きな異常が生じた場合は運転を停止する,重要性の高いセンサに小さな異常が生じた場合は運転を停止せずに前記重要性の高いセンサの出力を補正する,重要性の低いセンサに異常を生じた場合は運転を停止せずに,前記重要性の低いセンサの出力を補正する,などといった適切な制御が行われる。
従って不必要な場合にまで前記圧縮機の運転を停止させることがなく,あるいは一旦センサの検査のために運転を停止させた圧縮機を,不必要に長く運転を停止したままで保持させることがなく,運転の信頼性を損なうことが無い。
【0011】
前記圧縮機を停止してから所定時間が経過すると,いくつかのセンサの検出値は,予め期待される値に収束すると予想できる。従ってセンサの異常の程度の判定及びセンサの関連要素の判別は,前記時間経過検知手段によって所定時間の経過の検知がなされた後に,センサの検出値と予め期待される値に従って定められた規定値とを比較することで,センサの異常の程度を確実に判定することが可能である。
【0012】
前記圧縮機の吸い込み側もしくは吐出側の圧力を検出する圧力センサ,前記圧縮機の回転数を検出する回転数センサ,前記圧縮機を駆動する電動モータに通電する電流値を検出する電流センサ等の検出値は,前記圧縮機を停止してから所定時間が経過した後は予め期待される値に収束すると予想できる。これらのセンサの精度及び信頼度が極めて高く,異常が生じないことがわかっている状況では,所定時間は前記圧縮機を停止後これらのセンサが予め期待される値に収束するまでの時間とし,前記時間経過検知手段は,これらのセンサの値と予め期待される値から定められた所定の値とを比較することにより,所定時間の経過を検知することが可能である。
例えば前記電流センサの精度及び信頼度が極めて高い場合,前記電流センサの検出値は,前記圧縮機を停止してからしばらくするとゼロになることが期待できるので,前記所定の値及び所定時間を,それぞれゼロ値,前記圧縮機を停止直後から前記電流センサの検出値がゼロになるまでの時間,のように定め,前記電流センサの検出値がゼロになったのを前記時間経過検知手段に検知させれば,確実に前記圧縮機の停止後について所定時間の経過が検知される。
【発明を実施するための最良の形態】
【0013】
以下添付図面を参照しながら,本発明の実施の形態について説明し,本発明の理解に供する。尚,以下の実施の形態は,本発明を具体化した一例であって,本発明の技術的範囲を限定する性格のものではない。
ここに,図1は本発明の実施の形態に係る圧縮機の構成及び情報伝達のブロック図である。図2は本発明の実施の形態に係る圧縮機における各センサの検査の流れを示すフロー図である。図3は本発明の実施例に係る圧縮機における各センサの検査の流れを示すフロー図である。
【0014】
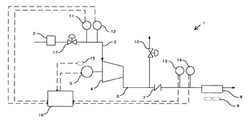
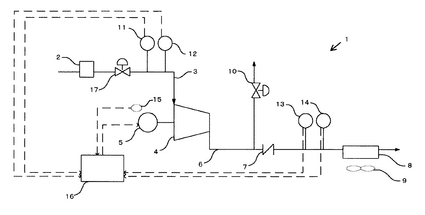
図1に示されるように,この実施形態に係る圧縮機1は,ガスを前記圧縮機に吸入するための吸い込みフィルタ2を有する。前記吸い込みフィルタ2により吸入されたガスは,圧縮機吸い込み配管3を通過し,圧縮機本体4へと導かれる。前記圧縮機本体4は電動機5と連結されており,前記電動機5が駆動されることにより,前記圧縮機本体4においてガスの圧縮が行われる。圧縮されたガスは,圧縮機吐出配管6により圧縮ガスを使用する機器へと導かれる。そのときガスが逆流を起こさないように,前記圧縮機吐出配管6の中途には逆止弁7が設けられている。更に前記圧縮機吐出配管6には,吐出ガス温度の調整のため,冷却器8及び冷却ファン9が設けられている。さらに前記圧縮機吐出配管6は,自身の内部気圧を大気圧に戻すための放気弁10を備えている。
【0015】
前記圧縮機吸い込み配管3では,吸い込み圧力センサ11及び吸い込み温度センサ12により,吸入するガスの温度及び圧力が検出される。同様に前記圧縮機吐出配管6には,吐出圧力センサ13及び吐出温度センサ14により,前記圧縮機本体4で圧縮されたガスの温度及び圧力が検出される。また,前記電動機5内部の回路を流れる電流の値は,電流センサ15によって検出される。各センサ11〜15による検出値は,前記検出値に応じた出力の信号として制御装置16に送られ,それらの信号に応じて前記制御装置16による前記圧縮機1の制御が行われる。
例えば,前記吐出圧力センサ13が所望の圧力よりも高い圧力を検出した場合,検出した高い圧力に応じた信号が前記制御装置16に送られ,吸入するガスの量を減らすために吸気調整弁17を閉じる制御が行われる。
【0016】
前記圧縮機1が停止した後しばらくすると,全てのセンサの検出値はそれぞれ一定の値に収束する。例えば前記圧縮機1の運転が停止されると同時に,前記吸い込みフィルタ2からガスの吸入が行われなくなり,前記吸気調整弁17及び前記放気弁10が開放され,所定時間が経過すると前記圧縮機吸い込み配管3の内部,及び前記圧縮機吐出配管6の内部で前記圧縮機本体4から前記逆止弁7までの領域は大気圧と等しくなり,異常がなければ前記吸い込み圧力センサ11は大気圧を検出する。
【0017】
同様に,前記圧縮機吐出配管6の内部で前記逆止弁7から前記冷却器8までの領域(つまり,前記吐出圧力センサ13及び前記吐出温度センサ14が配置されている領域)においても予め既知の圧力に安定することが知られており,異常がなければ前記吐出圧力センサ13は,予め既知の圧力を一定の値として検出する。ただし,それぞれのセンサが検出する一定の値は,当然ながらセンサの異常の有無及び異常の程度によって異なる。例えば,前記吐出圧力センサ13は所定時間が経過後,予め既知の圧力を検出するべきであるが,前記吐出圧力センサ13に誤差が生じている場合には予め既知の圧力からずれた値を検出する。例えば,前記吐出圧力センサ13が検出する圧力の範囲が0〜10MPaであるとする。圧力が0MPaであるとき0Vの電圧値を出力するものとすると,その場合を「0%の出力」と呼ぶ。同様に圧力が10MPaであるとき10Vの電圧値を出力するものとすると,その場合を「100%の出力」と呼ぶ。
【0018】
異常の程度の判定方法を,前記吐出圧力センサ13を例にとって説明する。前記圧縮機1が停止してから所定時間が経過した後,前記圧縮機吐出配管6内部の前記逆止弁7から前記冷却器8までの領域は,予め既知の圧力に等しくなっている。同様に前記吐出圧力センサ13による検出値は,予め既知の圧力を検出値のゼロ点に定めた場合,該圧力に相当する値の0MPaになっているはずで,同様に前記吐出圧力センサ13の出力は0Vになるはずである。ところが,前記吐出圧力センサ13のゼロ点にずれが生じ,前記吐出圧力センサ13の出力が,異常の無い状態における「0%の状態」(0V)から「+5%」(0.5V)へと誤差が生じていた場合には,前記吐出圧力センサ13は該圧力を0.5MPaと検出し,同様に出力は0.5Vとなる。
従って,検出されるべき値(0MPa)からずれた値が検出され,ずれた検出値に相当する出力が前記制御装置16に送られた場合には,前記吐出圧力センサ13には異常があると判定される。上述の場合では「+5%」の誤差があると,前記制御装置16により判定されることになる。
【0019】
次に,センサの異常の程度を前記制御装置16が判断する方法について説明する。前記圧縮機吐出配管6の内部で,前記逆止弁7から前記冷却器8までの領域における圧力に対して,前記圧縮機1が10%の過負荷までは許容できるとし,同様に圧力の低下も10%までは許容できるとする。この場合,前記吐出圧力センサ13については正常時の10%の誤差を許容限界としておく。誤差が0%(第1の範囲に相当)であれば異常なしと判断する。センサの狂いが0%より大きく,かつ正常時の10%未満(第2の範囲に相当)であれば,センサに軽異常が発生したと判断する。一方10%を超え,かつ100%以下の誤差(第3の範囲に相当)が検出された場合は,センサにより根本的な欠陥,つまり重異常が生じたものとみなす。
このような異常の程度の判定に用いる範囲は,予めセンサ毎に設定し,前記制御装置16に入力しておく。
【0020】
尚,圧縮機の保護,制御に使用しないセンサ(前記電流センサ15は電流値の読み取り,吸い込み温度センサ12は圧縮機の周囲温度の表示など)も,圧縮機の保護・制御に使用するセンサ(前記吐出圧力センサ13による圧力調整,前記吐出温度センサ14による焼損防止など)も同様に誤差が発生する場合がある。ただし,両者の重要度は異なり,例えば前者のセンサは重要度が低く,誤差が生じても誤差の大小にかかわらず前記圧縮機1の運転を再開させても構わない。
そこで予めそれぞれのセンサが,重要なセンサまたは重要でないセンサのいずれに該当するものであるのかを決めておく。重要なセンサが軽異常と判定された場合には,センサの出力補正を行うと共に,センサに軽異常が発生し,出力補正を行った旨の表示を行う。
【0021】
センサの出力補正は以下のように行う。
例えば,前記吐出圧力センサ13の出力が,異常の無い状態における「0%の状態」(0V)から「+5%」(0.5V)へとずれていた場合には,前記制御装置16で前記前記吐出圧力センサ13の出力値+5%を0%と読み直せばよい。つまり,以降の運転において前記吐出圧力センサ13の出力値から5%減じたもの,即ち前記吐出圧力センサ13の出力値から0.5Vを減じたものを実際に出力されるべき値として認識すれば,前記制御装置16では実際の圧力が正確に認識されることになり,所望の圧力のガスが前記圧縮機1により供給される。
【0022】
重要なセンサが重異常と判定された場合には,重異常が発生した旨の表示を行い,運転を再開しない。全ての重要なセンサについて軽異常もしくは異常なしと判定された場合は,軽異常と判定されたセンサの出力補正を行った上で運転を再開する。重要なセンサについて一つでも重異常が判定された場合は運転を再開しないものとする。一方,重要でないセンサに関しても異常なしの範囲,軽異常の範囲,重異常の範囲を定め,前記制御装置16に入力しておくものとするが,重要でないセンサに関しては異常の程度に係わらずセンサの出力補正を行い,運転再開の是非には関係ないものとする。
【0023】
以下,図2を参照しながら前記制御装置16による各センサの異常検査の処理手順,及び異常検査の結果に従って前記制御装置16が前記圧縮機1を運転制御する手順について説明する。S10,S20…は処理手順(ステップ)の番号を示す。
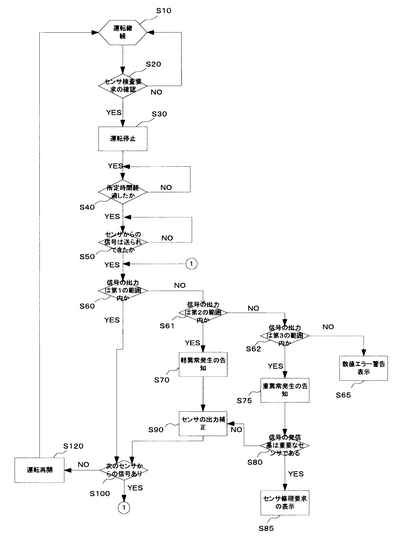
運転を継続(S10)している前記圧縮機1に対して,例えばユーザーが種々の指令を入力する操作部からのセンサ検査要求がなされた場合(S20),運転を停止する(S30)。このように運転停止は,前記制御装置16の演算部が,センサ検査要求に対して自動で行う。
【0024】
S40では全てのセンサの検出値が,それぞれ一定の値に収束するまで所定時間待機する。前記電動機5は前記圧縮機を停止後,暫くすると内部電流がゼロになる。また前記圧縮機を駆動する前記電流センサ15の検出値は精度及び信頼性が極めて高く,前記圧縮機を停止してからT1が経過した後は必ずゼロ値を検出するものとする。
ここで前記圧縮機1を停止してから前記電流センサ15の検出値がゼロに収束するまでの時間T1は,他の全てのセンサの検出値がそれぞれ一定の値に収束するまでにかかる時間よりも長いものとする。つまり,前記圧縮機1が停止してからT1が経過した時点では,全てのセンサはそれぞれ一定の値に収束しているものとする。従って前記所定時間をT1とし,前記制御装置16内に設けられた時間経過検知回路(時間経過検知手段に相当)に,前記電流センサ15から検出値ゼロに対応する出力の信号が送られてくるのを検知させれば,確実に前記圧縮機1の停止後T1が経過したことを検知できる。また,前記電流センサ15から検出値ゼロに対応する出力の信号が送られてくるのを検知した時点では,他のセンサの検出値は全て一定の値に収束している。
【0025】
続いて前記制御装置16は,前記圧縮機1が停止してからT1が経過後,前記制御装置16に順次各センサからそれぞれの検出値に対する信号が送られてくるのを確認する(S50)。信号が送られてきた場合はS60に進み,異常判定を行う(S50YES)。信号が送られてこない場合はそのまま待機し(S50NO),信号が送られてくるのを待つ。以下は最初にセンサAからの信号が送られてきたものする。以降は信号から各センサの異常及び各センサの重要度の判別がなされるが,それらの作業は前記制御装置16に組み込まれた異常程度判定回路(異常程度判定手段に相当),及びセンサ重要度判別回路(センサ関連要素判別手段に相当)により行われる。
【0026】
S60ではセンサAの信号が前記異常程度判定回路に転送され,該信号から前記センサAの検出値が読み取られる。読み取られた該検出値が予め前記制御装置16に入力され記憶された第1の範囲内にあるか否かを判定する。前記第1の範囲内(S60YES)にあれば前記センサAには異常なしとしS100に進む。
S60において該検出値が前記第1の範囲内になければ(S60NO)S61に進み,該検出値が予め前記制御装置16に入力され記憶された第2の範囲内にあるか否かを判定する。前記第2の範囲内にあれば(S61YES)前記センサAに軽異常が発生したものと判定しS70に進む。S70において軽異常が発生した旨が,前記制御装置16に設けられたディスプレイに表示される。
S61において前記第2の範囲内になければ(S61NO)S62に進み,前記センサAの検出値が予め前記制御装置16に入力され記憶された第3の範囲内にあるか否かを判定する。前記第3の範囲内にあれば(S62YES)センサAに重異常が発生したものと判定しS75に進む。S75において重異常が発生した旨が,前記ディスプレイに表示される。
前記第3の範囲内になければ(S62NO)数値エラーがあったものとし,数値エラー警告の旨が前記ディスプレイに表示(S65)され,そのまま待機が行われる。前記第3の範囲とは,前述の例でいえば,誤差が10%を超え,100%以下である場合であり,そしてここでいう数値エラーとは,誤差が100%を超える場合である。この数値エラーの場合は,センサAの異常ではなく,センサAからの出力を受ける側の機器の異常といった事態が想定される。
【0027】
S70で軽異常の発生が告知された後S90に進み,前記センサAの出力補正が行われる。一方S75で重異常の発生を告知したらS80に進む。このとき前記センサ重要度判別回路へ信号データの転送が行われる。
S80において,前記センサ重要度判別回路により転送された前記センサAの種類を読み取り,重要なセンサであるか否かが判別される。センサの重要度は,予めセンサの種類毎に前記制御装置16内の記憶手段に記憶されており,この情報との比較によって重要なセンサと判定された場合は(S80YES)S85に進み,運転停止が継続されたまま前記ディスプレイにおいて前記センサA修理要求の表示(S85)を行う。S80で重要でないセンサと判別された場合は(S80NO)S90に進み,該センサAの出力補正を行う。
【0028】
S60で異常なしと判定された場合,もしくはS90でセンサの出力補正がなされた場合はS100に進み,次センサからの信号があるか否かを確認する。例えばセンサBからの信号ありと判別された場合は(S100YES)S60に戻り,該センサBについて異常の判定及び重要度の判別を行う。次センサ無しと判別された場合は(S100NO)S120に進み,全てのセンサについて検査が完了したものとし,運転を再開する。
以上の手順により,各センサの異常の程度の判定及び重要度の判別がなされ,それらの結果に応じた前記圧縮機1への適切な制御が行われる。
【実施例】
【0029】
上述のような,圧縮機を停止させた直後から所定時間が経過後,各センサの検出値と予め定められた規定値とを比較することによる異常の程度の判定は,圧縮機停止後に決まった数値になるプロセスを検出しているセンサに対してであれば,同様の手続きによる適用が可能である。
【0030】
一方圧縮機の運転中に一定の値を検出することが予想できるセンサに対しては,前記圧縮機を運転中の各センサの検出値と,予め定められた規定値とを比較して異常の程度を判定することが可能である。
前記圧縮機の運転中に各センサの検査を行う場合には,センサが軽異常と判定された場合,または重要でないセンサが重異常と判定された場合には,該センサの出力を補正して運転を継続し,重要なセンサに対して重異常と判定された場合には該圧縮機を停止する制御を行うものとすれば良い。
【0031】
本発明の実施形態では重要でないセンサについても,異常なしの範囲,軽異常の範囲,重異常の範囲を定めおいたが,もともと重要でないセンサは運転停止の継続,若しくは運転停止の是非に関与しないものである。従って重要なセンサについては異常なしの範囲,軽異常の範囲,重異常の範囲を定めておくものとするが,重要でないセンサに対して異常なしの範囲,軽異常の範囲のみを定めておき,重異常の範囲を定めないものとしても本発明の目的は達成される。その場合は重要でないセンサに対して重異常が発生するケースがありえないので,図2においてS80の処理が必要でなくなり,同時に制御装置にセンサ重要度判別回路を設ける必要がなくなる。従って制御装置の構成が簡略化される。
【0032】
本発明の実施形態では所定時間の経過は,時間経過検知回路(時間経過検知手段に相当)に前記電流センサ15の検出値がゼロになるのを検知させることにより確認されたが,他のセンサCが圧縮機の停止後一定の値になることが予想されており,なおかつ該センサCの精度及び信頼性が極めて高く,該圧縮機が停止してから所定時間が経過すると確実に所定の値を検出する場合には,該センサCの検出値が所定の値に収束するのを検知することにより,該圧縮機の停止及び所定時間の経過を確認しても良い。例えば,圧縮機が前記電動機5の回転数を検出する回転数センサを有する構成である場合,前記回転数センサの精度及び信頼性が極めて高い場合には,該圧縮機が停止してから所定時間の経過後,前記回転数センサは必ずゼロ値を検出する。従って前記回転数センサがゼロ値を検出し,ゼロ値に対応する出力の信号が前記制御装置16に送られた場合,所定時間が経過したものとして,各センサの検査を開始することが可能である。また,前記吸い込み圧力センサ11の精度及び信頼性が極めて高い場合,前記吸い込み圧力センサ11が大気圧を検出した時点で所定時間の経過が確認されるものとしても良い。
【0033】
また,上述のように特定のセンサが所定の値を検出することによらなくとも,予め圧縮機の停止後,全てのセンサが一定の値に収束するまでの時間がわかっている場合,例えば該圧縮機が停止後30秒で全てのセンサが一定の値に収束するとわかっている場合には,30秒を所定時間として制御装置に入力しておき,該圧縮機の停止制御を行ってから30秒間の待機を行い,その後各センサの検査を行う手順とすればよい。
【0034】
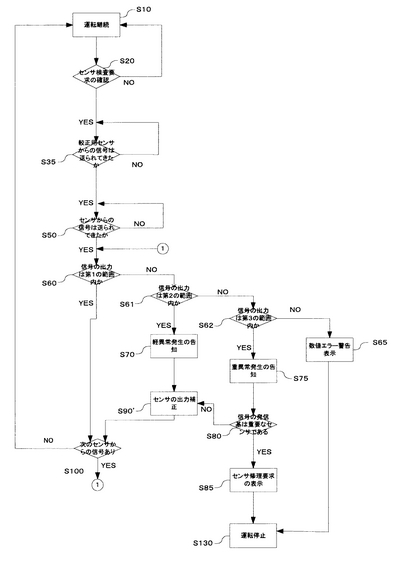
また,図3は図2とは別の,本発明の実施例に係る圧縮機における各センサの検査の流れを示すフローチャートである。前記図2に示した本件発明の実施の形態に係る圧縮機では,前記圧縮機1が一旦停止された後に,前記センサ各々の検査が行われた。一方本実施例は,通常運転時において前記センサの検査を行う場合の構成例を示すものである。
【0035】
図3に示されるフローチャートでは,図2に示されるフローチャートでは設けられていた,センサ検査要求(S20)がなされた後の圧縮機の運転の停止(S30),所定時間の待機(S40),全てのセンサについての検査が完了したとみなされた後の圧縮機の運転の再開(S120)といった処理手順(ステップ)が省かれている。替わって,以下に説明する較正用センサからの信号の確認(S35)及び,前記センサ修理要求の表示(S85)の後に,圧縮機の運転の停止(S130)という処理手順(ステップ)が加えられている。
【0036】
図2のフローチャートに示されるように,本発明の実施の形態に係る圧縮機1では,前記圧縮機1が停止してから所定時間経過すれば,前記センサの検査値が(ゼロ値などの)予め期待される値に収束することを利用して,前記センサの検査及び検出値の補正が行われた。一方,本発明の実施例に係る圧縮機においては,較正用の正確な値がセンサの補正値として別途前記制御装置16に与えられ,前記補正値と各センサによる検出値とが比較されることにより,前記センサの検査及び検出値の補正が行われる。例えば該圧縮機は,センサAと同種である較正用のセンサA’が設置可能な圧縮機である。前記較正用のセンサA’は通常運転時には設置されておらず,該圧縮機のセンサ検査時において設置されるものである。前記センサA’は,予め異常のないことが判っているセンサである。図3において,センサ検査要求(S20)が発せられると,各較正用のセンサの検出値が前記制御装置16の演算部に入力される(S35)。それに基づいて各センサの検査・補正がなされる。
【0037】
本実施例では,センサの出力補正(S90’)が,前記センサAの出力が前記センサA’の検出値に合致するように補正される。また,センサ修理要求の表示(S85)の後と,数値エラー警告表示(S65)の後に,圧縮機の運転の停止(S130)という処理手順(ステップ)が設けられている。従って,あくまで重要なセンサに重異常が発生した場合にのみ,本実施例に係る圧縮機の運転が停止され,不必要に頻繁に該圧縮機の運転を停止させることがない。なお,この図3のフローチャートにて該圧縮機の運転が停止された後は,ここには図示しない別のフローチャートにて,該圧縮機の運転が再開される。前記別のフローチャートは重異常と判定された重要な前記センサの修理,取り替え,またはその後の該圧縮機のメンテナンス,運転再開等の手順を示すものであるが,これは特に本発明の特徴をなすものではないので,説明を省略する。
【0038】
前記較正用のセンサA’の信頼性が極めて高く,較正用のデータの信頼性も高い場合が理想的ではあるが,前記センサが検出すべき対象量によっては,前記較正用のデータにさほど高い信頼性が望めない場合も想定される。このような場合には,本発明の実施例に係る圧縮機の運転中にセンサの補正を実行すると,その後該圧縮機の動作が一時的に不安定となるおそれがある。従ってこのような場合には,図3のフローチャートの,センサ出力補正(S90’)という処理手順(ステップ)に替えて,センサ用フラグの記憶(S90”,不図示)という処理手順(ステップ)とするのが望ましい。この場合,前記制御装置16は,センサ用フラグというバッファ領域(データの記憶領域)を備えている。そして,軽異常の発生の告知(S70)の後,或いは,重異常発生の告知(S75)の後に,センサAが本実施例に係る圧縮機の運転上必要不可欠な(重要な)センサでないと判別された後,そのセンサ用フラグに「センサの補正が必要」という旨を意味する所定の値が記憶される。このセンサ用フラグに前記所定の値が記憶される処理手順(ステップ)が前記センサ用フラグの記憶(S90”)である。該圧縮機の運転中には前記センサの補正を行うのが望ましくないので,S90”はあくまで前記所定の値が記録されるステップである。前記センサの補正は,該圧縮機の運転を停止した際に,若しくは該圧縮機の運転を停止してから運転を再開する際に,前記センサ用フラグに記憶された検査結果に従って,即ち,各々の前記センサのうち,前記センサ用フラグに所定の値が記憶されているものに限り行われる。
【0039】
較正用のデータの信頼性がさほど高くない場合には,図2に示されるフローチャートを最初から用いて,前記センサの検査を運転停止中に行っても構わない。また,図3に示されるフローチャートにおいて,S90’に従って,前記較正用のセンサの検出値により前記センサの検出値を補正する場合と,S90”に従って,前記センサ用フラグに補正が必要である旨を記憶する場合とを,センサの種類によって使い分けることも可能である。つまり,前記較正用のセンサA’の信頼性が高く,理想的な信頼性の前記較正用データが得られるようなセンサAのみについてはS90’のように検出値が補正され,理想的な信頼性の前記較正用データが得られない場合には,そのセンサBについて前記センサ用フラグに補正が必要である旨が記憶され,前記センサBについては運転を停止した際に検出値の補正が行われる構成としても良い。その場合,図3に示されるフローチャートにおいてS90’とS90”とが並列に設けられる。また,前記制御装置16には予め前記センサの種類毎に,S90’の処理を行うべきセンサとS90”の処理を行うべきセンサとが入力され記憶される。このように,予め記憶された前記センサの種類と検査中のセンサとが比較され,各センサ毎にS90’若しくはS90”の一方が選択されるようにすればよい。
その他,本発明の趣旨を逸脱しない限りにおいて様々な実施例を採用することができる。
【図面の簡単な説明】
【0040】
【図1】本発明の実施の形態に係る圧縮機の構成及び情報伝達のブロック図。
【図2】本発明の実施の形態に係る圧縮機における各センサの検査の流れを示すフロー図。
【図3】本発明の実施例に係る圧縮機における各センサの検査の流れを示すフロー図。
【符号の説明】
【0041】
1…圧縮機
2…吸い込みフィルタ
3…圧縮機吸い込み配管
4…圧縮機本体
5…電動機
6…圧縮機吐出配管
7…逆止弁
8…冷却器
9…冷却ファン
10…放気弁
11…吸い込み圧力センサ
12…吸い込み温度センサ
13…吐出圧力センサ
14…吐出温度センサ
15…電流センサ
16…制御装置
17…吸気調整弁
【技術分野】
【0001】
本発明は,圧縮機の制御に関するものであり,特に圧縮機の運転に関する信頼性を確保するための新しい機能に関するものである。
【背景技術】
【0002】
圧縮機には,安定した圧力及び温度の圧縮ガスを供給先に供給することが求められる。前記圧縮機は工場などのユーティリティー設備として利用され,上述したような安定した圧力及び温度の圧縮ガスの供給が果たせないと,工場の稼動に支障をきたす。従って前記圧縮機では吸い込み側及び吐出側に,圧力を検知するための圧力センサ,温度を検出するための温度センサといった種々のセンサが設置され,また,圧縮機には制御装置が設けられており,前記センサによる検出値は定期的に前記制御装置へと送られ,前記制御装置はそれらの検出値を基に前記圧縮機の運転制御を行う。更に近年は圧縮機の高機能化に伴い,運転上必要なセンサに加え,データ処理や保守管理を便利にするためのセンサも装備されるようになりつつある。
【0003】
前述のとおり,前記圧縮機の運転制御は種々のセンサによる検出値に従って行われるため,センサの検出値には高い精度が求められる。例えば,前記圧縮機の吐出側に設置された圧力センサが,実際の圧力よりも低い圧力を検知した場合には,前記圧力センサから送られてきた実際の圧力よりも低い圧力のデータに従って制御装置による前記圧縮機の運転制御が行われ,前記圧縮機は所望の圧力よりも高い圧力のガスを吐出しようとする。所望の圧力より高い圧力のガスを吐出すると,前記圧縮機を駆動する電動機は過負荷になり,その状態が継続されると電動機コイルの焼損や軸受けの破損を引き起こす不具合が生じる。
逆に実際の圧力よりも高い圧力を検知した場合には,前記圧縮機は所望の圧力よりも低い圧力のガスを吐出しようとする。この場合は前記圧縮機により圧縮されたガスを使用する側の機器に異常が生じることになる。
上述のように,前記圧縮機で用いられる種々のセンサには常に良好な精度が求められるため,センサ自体の異常の判定や,検出値の狂い等の異常が発見された場合に,センサの検出値を補正することは,圧縮機を稼動する上で非常に重要な作業である。
センサの異常を判定する手法としては,センサから前記制御部への検出値の転送が途絶えた場合をセンサの異常と判定する手法が,従来から広く知られ,用いられている。ところがこの手法は,センサの完全な故障や,センサから制御装置までを結ぶ信号線の断線といった事態のみを異常と判定するものでしかない。従ってセンサの検出値に誤差が生じた場合でも,異常との判定がなされないまま運転が継続されることになり,センサの異常を判定する手法としては不十分であることがわかる。
そこで検出器の精度の確認及び補正を行う手法として,特許文献1が知られている。特許文献1では,二つの受圧部に加わる圧力の差を検知し,圧力の差に相当する出力DC電圧を出力する差圧センサに対して,一方の重圧部には検出圧Aを印加し,他方の受圧部には切替弁により検出圧A又は検出圧Bのいずれかを切替えて印加できるようにし,前記二つの受圧部に検出圧Aを印加して強制的に差圧ゼロの状態を作り出し,このときの差圧センサの出力DC電圧をセンサ出力の誤差出力信号電圧とすることを特徴とする圧力センサ補正装置と,それを適用した送風機制御装置を開示している。
【特許文献1】特許第2751756号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら,特許文献1は差圧センサに関する補正を開示するのみで,差圧センサ以外の補正手段については開示されていない。また,切替弁を用いているので装置全体が大型化してしまう問題点がある。
また,検出器の検出誤差が余りにも大きいと,より根本的な故障が検出器に発生していると判断せねばならない。その場合は前記検出器の検出値を補正するのでは不十分であり,一旦圧縮機を停止させ,検出器の修理もしくは交換などを行わねばならない。
さらに,圧縮機には圧縮機の運転上必要不可欠なセンサとそうでないセンサがあり,後者のセンサで異常があった場合でも圧縮機を停止させると,圧縮機の運転維持に関する信頼性や効率が低下する。また,運転上必要不可欠なセンサに関しても,検出値の誤差が圧縮機の信頼性に影響を与えない程度に小さければ,検出値の補正を行うのみで十分である。従って検出値の小さな誤差で圧縮機の停止を行うと,やはり圧縮機の運転維持に関する信頼性が低下する。また圧縮機を停止させ,センサを検査する際に,その検査結果やセンサの重要度に応じてセンサの補正を行うか,また補正を行わず補正の必要性を示した警告を発するか,等の異なった対応を行うことが圧縮機の管理上好ましいが,従来技術ではそのような細かな対応がなされていない。
従って,本発明は上記事情に鑑みてなされたものであり,その目的とするところは,センサ毎に異常の程度を判定し,異常の程度及びセンサに関連する要素,例えば運転上の重要性等に鑑みて,異常の補正もしくは圧縮機の停止といった制御を適切に行うことが可能な圧縮機を提供することにある。
【課題を解決するための手段】
【0005】
上記目的を達成するために本発明は,センサによる検出値と予め定められた規定値とを比較して異常の程度を判定し,前記センサに関連する要素を判別すると共に,前記センサの異常の程度及び前記センサに関連する要素に応じて運転制御を行う圧縮機として構成されている。
前記規定値を複数段階に設定しておき,前記複数段階に設定された前記規定値と,前記センサによる検出値を比較することにより前記センサの異常の程度を判定することが考えられる。例えば,前記規定値が第1〜第3の3段階の範囲を規定するものであり,異常程度判定手段が,前記センサからの検出値が前記第1の範囲にあるときはセンサに異常なしとし,前記第2の範囲にあるときは軽異常とし,前記第3の範囲にあるときは重異常と判定する構成が考えられる。また,前記センサに関連する要素の具体例として,前記センサが前記圧縮機の運転上の重要性であることが考えられる。
【0006】
前記圧縮機の停止後から所定時間の経過を検知した後に,前記センサによる検出値と前記規定値とを比較して異常の程度の判定を行い,同様に前記センサに関連する要素を判別する場合が考えられる。
前記所定時間は,前記圧縮機の吸い込み側もしくは吐出側の圧力を検出する圧力センサによる検出値が,予め定められた所定の値になるのを検知したことで経過したものと考えても良い。また,前記圧縮機の回転数を検出する回転数センサによる検出値がゼロ値になるのを検知することにより,所定時間の経過を検知しても良い。同様に前記圧縮機を駆動する電動モータに通電する電流値を検出する電流センサによる検出値がゼロ値になるのを検知することにより,所定時間の経過を検知するものであっても良い。
【0007】
前記センサの異常の程度及び前記センサの重要性に応じた前記圧縮機の運転制御として,例えば,前記センサが軽異常と判定された場合,または前記センサが重異常と判定された場合であって,且つ該センサが重要なセンサでないと判別された場合に,前記制御装置が該センサの検出値が補正されるものであるのが望ましい。また,前記センサが重異常と判定された場合であって,且つ重要なセンサであると判別された場合に,前記圧縮機の運転停止を継続するのが望ましい。
【0008】
また,前記センサの検査が前記圧縮機の運転中に行われる場合も考えられる。このようなとき,前記圧縮機が前記センサの検査結果を記憶しておくための判定結果記憶手段を有する場合が考えられる。例えば,前記圧縮機の運転中に行われる検査によって,前記センサが軽異常であると判定された場合に,または前記センサが重異常と判定された場合であって,且つ該センサが前記圧縮機の運転上必要不可欠なセンサでないと判別された場合に,前記判定結果記憶手段にそれらの検査結果が記録され,前期判定結果記憶手段に記憶された判定結果に従って,前記圧縮機の運転停止中に該センサの検出値を補正する場合が考えられる。
【0009】
また,前記センサが重異常と判定された場合であって,且つ該センサが前記圧縮機の運転上必要不可欠なセンサであると判別された場合に,前記圧縮機が運転している場合には前記圧縮機の運転の停止を行うのが望ましい。更に,検査時には前記センサとは同種の予備センサを前記圧縮機に装着し,当該予備センサの検出値に従って前記センサの検査を行う場合も考えられる。
【発明の効果】
【0010】
本発明によれば,前記センサ毎に異常の程度を判定することが可能であり,前記センサ毎の異常の程度,及び前記圧縮機の運転における前記センサ毎の関連要素を考慮した上で,例えば,重要性の高いセンサに大きな異常が生じた場合は運転を停止する,重要性の高いセンサに小さな異常が生じた場合は運転を停止せずに前記重要性の高いセンサの出力を補正する,重要性の低いセンサに異常を生じた場合は運転を停止せずに,前記重要性の低いセンサの出力を補正する,などといった適切な制御が行われる。
従って不必要な場合にまで前記圧縮機の運転を停止させることがなく,あるいは一旦センサの検査のために運転を停止させた圧縮機を,不必要に長く運転を停止したままで保持させることがなく,運転の信頼性を損なうことが無い。
【0011】
前記圧縮機を停止してから所定時間が経過すると,いくつかのセンサの検出値は,予め期待される値に収束すると予想できる。従ってセンサの異常の程度の判定及びセンサの関連要素の判別は,前記時間経過検知手段によって所定時間の経過の検知がなされた後に,センサの検出値と予め期待される値に従って定められた規定値とを比較することで,センサの異常の程度を確実に判定することが可能である。
【0012】
前記圧縮機の吸い込み側もしくは吐出側の圧力を検出する圧力センサ,前記圧縮機の回転数を検出する回転数センサ,前記圧縮機を駆動する電動モータに通電する電流値を検出する電流センサ等の検出値は,前記圧縮機を停止してから所定時間が経過した後は予め期待される値に収束すると予想できる。これらのセンサの精度及び信頼度が極めて高く,異常が生じないことがわかっている状況では,所定時間は前記圧縮機を停止後これらのセンサが予め期待される値に収束するまでの時間とし,前記時間経過検知手段は,これらのセンサの値と予め期待される値から定められた所定の値とを比較することにより,所定時間の経過を検知することが可能である。
例えば前記電流センサの精度及び信頼度が極めて高い場合,前記電流センサの検出値は,前記圧縮機を停止してからしばらくするとゼロになることが期待できるので,前記所定の値及び所定時間を,それぞれゼロ値,前記圧縮機を停止直後から前記電流センサの検出値がゼロになるまでの時間,のように定め,前記電流センサの検出値がゼロになったのを前記時間経過検知手段に検知させれば,確実に前記圧縮機の停止後について所定時間の経過が検知される。
【発明を実施するための最良の形態】
【0013】
以下添付図面を参照しながら,本発明の実施の形態について説明し,本発明の理解に供する。尚,以下の実施の形態は,本発明を具体化した一例であって,本発明の技術的範囲を限定する性格のものではない。
ここに,図1は本発明の実施の形態に係る圧縮機の構成及び情報伝達のブロック図である。図2は本発明の実施の形態に係る圧縮機における各センサの検査の流れを示すフロー図である。図3は本発明の実施例に係る圧縮機における各センサの検査の流れを示すフロー図である。
【0014】
図1に示されるように,この実施形態に係る圧縮機1は,ガスを前記圧縮機に吸入するための吸い込みフィルタ2を有する。前記吸い込みフィルタ2により吸入されたガスは,圧縮機吸い込み配管3を通過し,圧縮機本体4へと導かれる。前記圧縮機本体4は電動機5と連結されており,前記電動機5が駆動されることにより,前記圧縮機本体4においてガスの圧縮が行われる。圧縮されたガスは,圧縮機吐出配管6により圧縮ガスを使用する機器へと導かれる。そのときガスが逆流を起こさないように,前記圧縮機吐出配管6の中途には逆止弁7が設けられている。更に前記圧縮機吐出配管6には,吐出ガス温度の調整のため,冷却器8及び冷却ファン9が設けられている。さらに前記圧縮機吐出配管6は,自身の内部気圧を大気圧に戻すための放気弁10を備えている。
【0015】
前記圧縮機吸い込み配管3では,吸い込み圧力センサ11及び吸い込み温度センサ12により,吸入するガスの温度及び圧力が検出される。同様に前記圧縮機吐出配管6には,吐出圧力センサ13及び吐出温度センサ14により,前記圧縮機本体4で圧縮されたガスの温度及び圧力が検出される。また,前記電動機5内部の回路を流れる電流の値は,電流センサ15によって検出される。各センサ11〜15による検出値は,前記検出値に応じた出力の信号として制御装置16に送られ,それらの信号に応じて前記制御装置16による前記圧縮機1の制御が行われる。
例えば,前記吐出圧力センサ13が所望の圧力よりも高い圧力を検出した場合,検出した高い圧力に応じた信号が前記制御装置16に送られ,吸入するガスの量を減らすために吸気調整弁17を閉じる制御が行われる。
【0016】
前記圧縮機1が停止した後しばらくすると,全てのセンサの検出値はそれぞれ一定の値に収束する。例えば前記圧縮機1の運転が停止されると同時に,前記吸い込みフィルタ2からガスの吸入が行われなくなり,前記吸気調整弁17及び前記放気弁10が開放され,所定時間が経過すると前記圧縮機吸い込み配管3の内部,及び前記圧縮機吐出配管6の内部で前記圧縮機本体4から前記逆止弁7までの領域は大気圧と等しくなり,異常がなければ前記吸い込み圧力センサ11は大気圧を検出する。
【0017】
同様に,前記圧縮機吐出配管6の内部で前記逆止弁7から前記冷却器8までの領域(つまり,前記吐出圧力センサ13及び前記吐出温度センサ14が配置されている領域)においても予め既知の圧力に安定することが知られており,異常がなければ前記吐出圧力センサ13は,予め既知の圧力を一定の値として検出する。ただし,それぞれのセンサが検出する一定の値は,当然ながらセンサの異常の有無及び異常の程度によって異なる。例えば,前記吐出圧力センサ13は所定時間が経過後,予め既知の圧力を検出するべきであるが,前記吐出圧力センサ13に誤差が生じている場合には予め既知の圧力からずれた値を検出する。例えば,前記吐出圧力センサ13が検出する圧力の範囲が0〜10MPaであるとする。圧力が0MPaであるとき0Vの電圧値を出力するものとすると,その場合を「0%の出力」と呼ぶ。同様に圧力が10MPaであるとき10Vの電圧値を出力するものとすると,その場合を「100%の出力」と呼ぶ。
【0018】
異常の程度の判定方法を,前記吐出圧力センサ13を例にとって説明する。前記圧縮機1が停止してから所定時間が経過した後,前記圧縮機吐出配管6内部の前記逆止弁7から前記冷却器8までの領域は,予め既知の圧力に等しくなっている。同様に前記吐出圧力センサ13による検出値は,予め既知の圧力を検出値のゼロ点に定めた場合,該圧力に相当する値の0MPaになっているはずで,同様に前記吐出圧力センサ13の出力は0Vになるはずである。ところが,前記吐出圧力センサ13のゼロ点にずれが生じ,前記吐出圧力センサ13の出力が,異常の無い状態における「0%の状態」(0V)から「+5%」(0.5V)へと誤差が生じていた場合には,前記吐出圧力センサ13は該圧力を0.5MPaと検出し,同様に出力は0.5Vとなる。
従って,検出されるべき値(0MPa)からずれた値が検出され,ずれた検出値に相当する出力が前記制御装置16に送られた場合には,前記吐出圧力センサ13には異常があると判定される。上述の場合では「+5%」の誤差があると,前記制御装置16により判定されることになる。
【0019】
次に,センサの異常の程度を前記制御装置16が判断する方法について説明する。前記圧縮機吐出配管6の内部で,前記逆止弁7から前記冷却器8までの領域における圧力に対して,前記圧縮機1が10%の過負荷までは許容できるとし,同様に圧力の低下も10%までは許容できるとする。この場合,前記吐出圧力センサ13については正常時の10%の誤差を許容限界としておく。誤差が0%(第1の範囲に相当)であれば異常なしと判断する。センサの狂いが0%より大きく,かつ正常時の10%未満(第2の範囲に相当)であれば,センサに軽異常が発生したと判断する。一方10%を超え,かつ100%以下の誤差(第3の範囲に相当)が検出された場合は,センサにより根本的な欠陥,つまり重異常が生じたものとみなす。
このような異常の程度の判定に用いる範囲は,予めセンサ毎に設定し,前記制御装置16に入力しておく。
【0020】
尚,圧縮機の保護,制御に使用しないセンサ(前記電流センサ15は電流値の読み取り,吸い込み温度センサ12は圧縮機の周囲温度の表示など)も,圧縮機の保護・制御に使用するセンサ(前記吐出圧力センサ13による圧力調整,前記吐出温度センサ14による焼損防止など)も同様に誤差が発生する場合がある。ただし,両者の重要度は異なり,例えば前者のセンサは重要度が低く,誤差が生じても誤差の大小にかかわらず前記圧縮機1の運転を再開させても構わない。
そこで予めそれぞれのセンサが,重要なセンサまたは重要でないセンサのいずれに該当するものであるのかを決めておく。重要なセンサが軽異常と判定された場合には,センサの出力補正を行うと共に,センサに軽異常が発生し,出力補正を行った旨の表示を行う。
【0021】
センサの出力補正は以下のように行う。
例えば,前記吐出圧力センサ13の出力が,異常の無い状態における「0%の状態」(0V)から「+5%」(0.5V)へとずれていた場合には,前記制御装置16で前記前記吐出圧力センサ13の出力値+5%を0%と読み直せばよい。つまり,以降の運転において前記吐出圧力センサ13の出力値から5%減じたもの,即ち前記吐出圧力センサ13の出力値から0.5Vを減じたものを実際に出力されるべき値として認識すれば,前記制御装置16では実際の圧力が正確に認識されることになり,所望の圧力のガスが前記圧縮機1により供給される。
【0022】
重要なセンサが重異常と判定された場合には,重異常が発生した旨の表示を行い,運転を再開しない。全ての重要なセンサについて軽異常もしくは異常なしと判定された場合は,軽異常と判定されたセンサの出力補正を行った上で運転を再開する。重要なセンサについて一つでも重異常が判定された場合は運転を再開しないものとする。一方,重要でないセンサに関しても異常なしの範囲,軽異常の範囲,重異常の範囲を定め,前記制御装置16に入力しておくものとするが,重要でないセンサに関しては異常の程度に係わらずセンサの出力補正を行い,運転再開の是非には関係ないものとする。
【0023】
以下,図2を参照しながら前記制御装置16による各センサの異常検査の処理手順,及び異常検査の結果に従って前記制御装置16が前記圧縮機1を運転制御する手順について説明する。S10,S20…は処理手順(ステップ)の番号を示す。
運転を継続(S10)している前記圧縮機1に対して,例えばユーザーが種々の指令を入力する操作部からのセンサ検査要求がなされた場合(S20),運転を停止する(S30)。このように運転停止は,前記制御装置16の演算部が,センサ検査要求に対して自動で行う。
【0024】
S40では全てのセンサの検出値が,それぞれ一定の値に収束するまで所定時間待機する。前記電動機5は前記圧縮機を停止後,暫くすると内部電流がゼロになる。また前記圧縮機を駆動する前記電流センサ15の検出値は精度及び信頼性が極めて高く,前記圧縮機を停止してからT1が経過した後は必ずゼロ値を検出するものとする。
ここで前記圧縮機1を停止してから前記電流センサ15の検出値がゼロに収束するまでの時間T1は,他の全てのセンサの検出値がそれぞれ一定の値に収束するまでにかかる時間よりも長いものとする。つまり,前記圧縮機1が停止してからT1が経過した時点では,全てのセンサはそれぞれ一定の値に収束しているものとする。従って前記所定時間をT1とし,前記制御装置16内に設けられた時間経過検知回路(時間経過検知手段に相当)に,前記電流センサ15から検出値ゼロに対応する出力の信号が送られてくるのを検知させれば,確実に前記圧縮機1の停止後T1が経過したことを検知できる。また,前記電流センサ15から検出値ゼロに対応する出力の信号が送られてくるのを検知した時点では,他のセンサの検出値は全て一定の値に収束している。
【0025】
続いて前記制御装置16は,前記圧縮機1が停止してからT1が経過後,前記制御装置16に順次各センサからそれぞれの検出値に対する信号が送られてくるのを確認する(S50)。信号が送られてきた場合はS60に進み,異常判定を行う(S50YES)。信号が送られてこない場合はそのまま待機し(S50NO),信号が送られてくるのを待つ。以下は最初にセンサAからの信号が送られてきたものする。以降は信号から各センサの異常及び各センサの重要度の判別がなされるが,それらの作業は前記制御装置16に組み込まれた異常程度判定回路(異常程度判定手段に相当),及びセンサ重要度判別回路(センサ関連要素判別手段に相当)により行われる。
【0026】
S60ではセンサAの信号が前記異常程度判定回路に転送され,該信号から前記センサAの検出値が読み取られる。読み取られた該検出値が予め前記制御装置16に入力され記憶された第1の範囲内にあるか否かを判定する。前記第1の範囲内(S60YES)にあれば前記センサAには異常なしとしS100に進む。
S60において該検出値が前記第1の範囲内になければ(S60NO)S61に進み,該検出値が予め前記制御装置16に入力され記憶された第2の範囲内にあるか否かを判定する。前記第2の範囲内にあれば(S61YES)前記センサAに軽異常が発生したものと判定しS70に進む。S70において軽異常が発生した旨が,前記制御装置16に設けられたディスプレイに表示される。
S61において前記第2の範囲内になければ(S61NO)S62に進み,前記センサAの検出値が予め前記制御装置16に入力され記憶された第3の範囲内にあるか否かを判定する。前記第3の範囲内にあれば(S62YES)センサAに重異常が発生したものと判定しS75に進む。S75において重異常が発生した旨が,前記ディスプレイに表示される。
前記第3の範囲内になければ(S62NO)数値エラーがあったものとし,数値エラー警告の旨が前記ディスプレイに表示(S65)され,そのまま待機が行われる。前記第3の範囲とは,前述の例でいえば,誤差が10%を超え,100%以下である場合であり,そしてここでいう数値エラーとは,誤差が100%を超える場合である。この数値エラーの場合は,センサAの異常ではなく,センサAからの出力を受ける側の機器の異常といった事態が想定される。
【0027】
S70で軽異常の発生が告知された後S90に進み,前記センサAの出力補正が行われる。一方S75で重異常の発生を告知したらS80に進む。このとき前記センサ重要度判別回路へ信号データの転送が行われる。
S80において,前記センサ重要度判別回路により転送された前記センサAの種類を読み取り,重要なセンサであるか否かが判別される。センサの重要度は,予めセンサの種類毎に前記制御装置16内の記憶手段に記憶されており,この情報との比較によって重要なセンサと判定された場合は(S80YES)S85に進み,運転停止が継続されたまま前記ディスプレイにおいて前記センサA修理要求の表示(S85)を行う。S80で重要でないセンサと判別された場合は(S80NO)S90に進み,該センサAの出力補正を行う。
【0028】
S60で異常なしと判定された場合,もしくはS90でセンサの出力補正がなされた場合はS100に進み,次センサからの信号があるか否かを確認する。例えばセンサBからの信号ありと判別された場合は(S100YES)S60に戻り,該センサBについて異常の判定及び重要度の判別を行う。次センサ無しと判別された場合は(S100NO)S120に進み,全てのセンサについて検査が完了したものとし,運転を再開する。
以上の手順により,各センサの異常の程度の判定及び重要度の判別がなされ,それらの結果に応じた前記圧縮機1への適切な制御が行われる。
【実施例】
【0029】
上述のような,圧縮機を停止させた直後から所定時間が経過後,各センサの検出値と予め定められた規定値とを比較することによる異常の程度の判定は,圧縮機停止後に決まった数値になるプロセスを検出しているセンサに対してであれば,同様の手続きによる適用が可能である。
【0030】
一方圧縮機の運転中に一定の値を検出することが予想できるセンサに対しては,前記圧縮機を運転中の各センサの検出値と,予め定められた規定値とを比較して異常の程度を判定することが可能である。
前記圧縮機の運転中に各センサの検査を行う場合には,センサが軽異常と判定された場合,または重要でないセンサが重異常と判定された場合には,該センサの出力を補正して運転を継続し,重要なセンサに対して重異常と判定された場合には該圧縮機を停止する制御を行うものとすれば良い。
【0031】
本発明の実施形態では重要でないセンサについても,異常なしの範囲,軽異常の範囲,重異常の範囲を定めおいたが,もともと重要でないセンサは運転停止の継続,若しくは運転停止の是非に関与しないものである。従って重要なセンサについては異常なしの範囲,軽異常の範囲,重異常の範囲を定めておくものとするが,重要でないセンサに対して異常なしの範囲,軽異常の範囲のみを定めておき,重異常の範囲を定めないものとしても本発明の目的は達成される。その場合は重要でないセンサに対して重異常が発生するケースがありえないので,図2においてS80の処理が必要でなくなり,同時に制御装置にセンサ重要度判別回路を設ける必要がなくなる。従って制御装置の構成が簡略化される。
【0032】
本発明の実施形態では所定時間の経過は,時間経過検知回路(時間経過検知手段に相当)に前記電流センサ15の検出値がゼロになるのを検知させることにより確認されたが,他のセンサCが圧縮機の停止後一定の値になることが予想されており,なおかつ該センサCの精度及び信頼性が極めて高く,該圧縮機が停止してから所定時間が経過すると確実に所定の値を検出する場合には,該センサCの検出値が所定の値に収束するのを検知することにより,該圧縮機の停止及び所定時間の経過を確認しても良い。例えば,圧縮機が前記電動機5の回転数を検出する回転数センサを有する構成である場合,前記回転数センサの精度及び信頼性が極めて高い場合には,該圧縮機が停止してから所定時間の経過後,前記回転数センサは必ずゼロ値を検出する。従って前記回転数センサがゼロ値を検出し,ゼロ値に対応する出力の信号が前記制御装置16に送られた場合,所定時間が経過したものとして,各センサの検査を開始することが可能である。また,前記吸い込み圧力センサ11の精度及び信頼性が極めて高い場合,前記吸い込み圧力センサ11が大気圧を検出した時点で所定時間の経過が確認されるものとしても良い。
【0033】
また,上述のように特定のセンサが所定の値を検出することによらなくとも,予め圧縮機の停止後,全てのセンサが一定の値に収束するまでの時間がわかっている場合,例えば該圧縮機が停止後30秒で全てのセンサが一定の値に収束するとわかっている場合には,30秒を所定時間として制御装置に入力しておき,該圧縮機の停止制御を行ってから30秒間の待機を行い,その後各センサの検査を行う手順とすればよい。
【0034】
また,図3は図2とは別の,本発明の実施例に係る圧縮機における各センサの検査の流れを示すフローチャートである。前記図2に示した本件発明の実施の形態に係る圧縮機では,前記圧縮機1が一旦停止された後に,前記センサ各々の検査が行われた。一方本実施例は,通常運転時において前記センサの検査を行う場合の構成例を示すものである。
【0035】
図3に示されるフローチャートでは,図2に示されるフローチャートでは設けられていた,センサ検査要求(S20)がなされた後の圧縮機の運転の停止(S30),所定時間の待機(S40),全てのセンサについての検査が完了したとみなされた後の圧縮機の運転の再開(S120)といった処理手順(ステップ)が省かれている。替わって,以下に説明する較正用センサからの信号の確認(S35)及び,前記センサ修理要求の表示(S85)の後に,圧縮機の運転の停止(S130)という処理手順(ステップ)が加えられている。
【0036】
図2のフローチャートに示されるように,本発明の実施の形態に係る圧縮機1では,前記圧縮機1が停止してから所定時間経過すれば,前記センサの検査値が(ゼロ値などの)予め期待される値に収束することを利用して,前記センサの検査及び検出値の補正が行われた。一方,本発明の実施例に係る圧縮機においては,較正用の正確な値がセンサの補正値として別途前記制御装置16に与えられ,前記補正値と各センサによる検出値とが比較されることにより,前記センサの検査及び検出値の補正が行われる。例えば該圧縮機は,センサAと同種である較正用のセンサA’が設置可能な圧縮機である。前記較正用のセンサA’は通常運転時には設置されておらず,該圧縮機のセンサ検査時において設置されるものである。前記センサA’は,予め異常のないことが判っているセンサである。図3において,センサ検査要求(S20)が発せられると,各較正用のセンサの検出値が前記制御装置16の演算部に入力される(S35)。それに基づいて各センサの検査・補正がなされる。
【0037】
本実施例では,センサの出力補正(S90’)が,前記センサAの出力が前記センサA’の検出値に合致するように補正される。また,センサ修理要求の表示(S85)の後と,数値エラー警告表示(S65)の後に,圧縮機の運転の停止(S130)という処理手順(ステップ)が設けられている。従って,あくまで重要なセンサに重異常が発生した場合にのみ,本実施例に係る圧縮機の運転が停止され,不必要に頻繁に該圧縮機の運転を停止させることがない。なお,この図3のフローチャートにて該圧縮機の運転が停止された後は,ここには図示しない別のフローチャートにて,該圧縮機の運転が再開される。前記別のフローチャートは重異常と判定された重要な前記センサの修理,取り替え,またはその後の該圧縮機のメンテナンス,運転再開等の手順を示すものであるが,これは特に本発明の特徴をなすものではないので,説明を省略する。
【0038】
前記較正用のセンサA’の信頼性が極めて高く,較正用のデータの信頼性も高い場合が理想的ではあるが,前記センサが検出すべき対象量によっては,前記較正用のデータにさほど高い信頼性が望めない場合も想定される。このような場合には,本発明の実施例に係る圧縮機の運転中にセンサの補正を実行すると,その後該圧縮機の動作が一時的に不安定となるおそれがある。従ってこのような場合には,図3のフローチャートの,センサ出力補正(S90’)という処理手順(ステップ)に替えて,センサ用フラグの記憶(S90”,不図示)という処理手順(ステップ)とするのが望ましい。この場合,前記制御装置16は,センサ用フラグというバッファ領域(データの記憶領域)を備えている。そして,軽異常の発生の告知(S70)の後,或いは,重異常発生の告知(S75)の後に,センサAが本実施例に係る圧縮機の運転上必要不可欠な(重要な)センサでないと判別された後,そのセンサ用フラグに「センサの補正が必要」という旨を意味する所定の値が記憶される。このセンサ用フラグに前記所定の値が記憶される処理手順(ステップ)が前記センサ用フラグの記憶(S90”)である。該圧縮機の運転中には前記センサの補正を行うのが望ましくないので,S90”はあくまで前記所定の値が記録されるステップである。前記センサの補正は,該圧縮機の運転を停止した際に,若しくは該圧縮機の運転を停止してから運転を再開する際に,前記センサ用フラグに記憶された検査結果に従って,即ち,各々の前記センサのうち,前記センサ用フラグに所定の値が記憶されているものに限り行われる。
【0039】
較正用のデータの信頼性がさほど高くない場合には,図2に示されるフローチャートを最初から用いて,前記センサの検査を運転停止中に行っても構わない。また,図3に示されるフローチャートにおいて,S90’に従って,前記較正用のセンサの検出値により前記センサの検出値を補正する場合と,S90”に従って,前記センサ用フラグに補正が必要である旨を記憶する場合とを,センサの種類によって使い分けることも可能である。つまり,前記較正用のセンサA’の信頼性が高く,理想的な信頼性の前記較正用データが得られるようなセンサAのみについてはS90’のように検出値が補正され,理想的な信頼性の前記較正用データが得られない場合には,そのセンサBについて前記センサ用フラグに補正が必要である旨が記憶され,前記センサBについては運転を停止した際に検出値の補正が行われる構成としても良い。その場合,図3に示されるフローチャートにおいてS90’とS90”とが並列に設けられる。また,前記制御装置16には予め前記センサの種類毎に,S90’の処理を行うべきセンサとS90”の処理を行うべきセンサとが入力され記憶される。このように,予め記憶された前記センサの種類と検査中のセンサとが比較され,各センサ毎にS90’若しくはS90”の一方が選択されるようにすればよい。
その他,本発明の趣旨を逸脱しない限りにおいて様々な実施例を採用することができる。
【図面の簡単な説明】
【0040】
【図1】本発明の実施の形態に係る圧縮機の構成及び情報伝達のブロック図。
【図2】本発明の実施の形態に係る圧縮機における各センサの検査の流れを示すフロー図。
【図3】本発明の実施例に係る圧縮機における各センサの検査の流れを示すフロー図。
【符号の説明】
【0041】
1…圧縮機
2…吸い込みフィルタ
3…圧縮機吸い込み配管
4…圧縮機本体
5…電動機
6…圧縮機吐出配管
7…逆止弁
8…冷却器
9…冷却ファン
10…放気弁
11…吸い込み圧力センサ
12…吸い込み温度センサ
13…吐出圧力センサ
14…吐出温度センサ
15…電流センサ
16…制御装置
17…吸気調整弁
【特許請求の範囲】
【請求項1】
複数のセンサからの信号に基づいて圧縮機の運転制御を行う制御装置を備えた圧縮機において,
前記制御装置が,
前記センサによる検出値と予め定められた規定値とを比較して異常の程度を判定する異常程度判定手段と,
前記センサに関連する要素を判別するセンサ関連要素判別手段とを具備し,
前記異常程度判定手段により判定された前記センサの異常の程度及び前記センサ関連要素判別手段により判別された前記センサに関連する要素に応じて運転制御を行ってなることを特徴とする圧縮機。
【請求項2】
前記規定値が複数段階に設定されており,前記複数段階に設定された前記規定値と,前記センサによる検出値を比較することにより前記センサの異常の程度を判定する請求項1に記載の圧縮機。
【請求項3】
前記規定値が第1〜第3の3段階の範囲を規定するものであり,前記異常程度判定手段が,前記センサからの検出値が前記第1の範囲にあるときはセンサに異常なしとし,前記第2の範囲にあるときは軽異常とし,前記第3の範囲にあるときは重異常と判定する請求項1または2に記載の圧縮機。
【請求項4】
前記センサに関連する要素が,前記センサの運転上における重要性である請求項1〜3のいずれかに記載の圧縮機。
【請求項5】
前記制御装置が,前記圧縮機を停止後,所定時間が経過したことを検知する時間経過検知手段を更に備え,
前記時間経過検知手段が,前記圧縮機の停止後から所定時間の経過を検知した後に,前記異常程度判定手段が前記センサによる検出値と前記規定値とを比較して異常の程度の判定を行い,同様に前記センサ関連要素判別手段が前記センサの関連要素を判別するものである請求項1〜4のいずれかに記載の圧縮機。
【請求項6】
前記センサが前記圧縮機の吸い込み側もしくは吐出側の圧力を検出する圧力センサを含み,前記時間経過検知手段が,前記圧縮機が停止後に前記圧力センサによる検出値が予め定められた所定の値になるのを検知することにより,所定時間の経過を検知するものである請求項5に記載の圧縮機。
【請求項7】
前記センサが前記圧縮機の回転数を検出する回転数センサを含み,前記時間経過検知手段が,前記圧縮機が停止後に前記回転数センサによる検出値がゼロ値になるのを検知することにより,所定時間の経過を検知するものである請求項5に記載の圧縮機。
【請求項8】
前記センサが前記圧縮機を駆動する電動モータに通電する電流値を検出する電流センサを含み,前記時間経過検知手段が,前記圧縮機が停止後に前記電流センサによる検出値がゼロ値になるのを検知することにより,所定時間の経過を検知するものである請求項5に記載の圧縮機。
【請求項9】
前記センサが軽異常と判定された場合に,または前記センサが重異常と判定された場合であって且つ該センサが前記圧縮機の運転上重要なセンサでないと判別された場合に,該センサの検出値が補正されてなる請求項4〜8のいずれかに記載の圧縮機。
【請求項10】
前記センサが重異常と判定された場合であって且つ該センサが前記圧縮機の運転上重要なセンサであると判定された場合に,前記圧縮機の運転停止が継続されてなる請求項5〜9のいずれかに記載の圧縮機。
【請求項11】
前記圧縮機の運転中に,前記異常程度判定手段が前記センサによる検出値と前記規定値とを比較して異常の程度の判定を行い,同様に前記センサ関連要素判別手段が前記センサの関連要素を判別するものである請求項1〜4のいずれかに記載の圧縮機。
【請求項12】
前記異常程度判定手段により判定された結果を前記センサ毎に記憶する判定結果記憶手段を更に備え,
前記判定結果記憶手段が,前記センサについて軽異常と判定された場合に,または前記センサが重異常と判定された場合であって且つ該センサが前記圧縮機の運転上重要なセンサでないと判別された場合に,前記結果を記憶するものであり,前記判定結果記憶手段に記憶された前記結果に従って,前記圧縮機の運転停止中に前記センサの検出値が補正されてなる請求項11に記載の圧縮機。
【請求項13】
前記センサが重異常と判定された場合であって,且つ該センサが前記圧縮機の運転上重要なセンサであると判別された場合に,前記圧縮機の運転を停止するものである請求項11または12に記載の圧縮機。
【請求項14】
前記規定値が,前記センサと同種の予備センサの検出値から定められるものである請求項11〜13のいずれかに記載の圧縮機。
【請求項1】
複数のセンサからの信号に基づいて圧縮機の運転制御を行う制御装置を備えた圧縮機において,
前記制御装置が,
前記センサによる検出値と予め定められた規定値とを比較して異常の程度を判定する異常程度判定手段と,
前記センサに関連する要素を判別するセンサ関連要素判別手段とを具備し,
前記異常程度判定手段により判定された前記センサの異常の程度及び前記センサ関連要素判別手段により判別された前記センサに関連する要素に応じて運転制御を行ってなることを特徴とする圧縮機。
【請求項2】
前記規定値が複数段階に設定されており,前記複数段階に設定された前記規定値と,前記センサによる検出値を比較することにより前記センサの異常の程度を判定する請求項1に記載の圧縮機。
【請求項3】
前記規定値が第1〜第3の3段階の範囲を規定するものであり,前記異常程度判定手段が,前記センサからの検出値が前記第1の範囲にあるときはセンサに異常なしとし,前記第2の範囲にあるときは軽異常とし,前記第3の範囲にあるときは重異常と判定する請求項1または2に記載の圧縮機。
【請求項4】
前記センサに関連する要素が,前記センサの運転上における重要性である請求項1〜3のいずれかに記載の圧縮機。
【請求項5】
前記制御装置が,前記圧縮機を停止後,所定時間が経過したことを検知する時間経過検知手段を更に備え,
前記時間経過検知手段が,前記圧縮機の停止後から所定時間の経過を検知した後に,前記異常程度判定手段が前記センサによる検出値と前記規定値とを比較して異常の程度の判定を行い,同様に前記センサ関連要素判別手段が前記センサの関連要素を判別するものである請求項1〜4のいずれかに記載の圧縮機。
【請求項6】
前記センサが前記圧縮機の吸い込み側もしくは吐出側の圧力を検出する圧力センサを含み,前記時間経過検知手段が,前記圧縮機が停止後に前記圧力センサによる検出値が予め定められた所定の値になるのを検知することにより,所定時間の経過を検知するものである請求項5に記載の圧縮機。
【請求項7】
前記センサが前記圧縮機の回転数を検出する回転数センサを含み,前記時間経過検知手段が,前記圧縮機が停止後に前記回転数センサによる検出値がゼロ値になるのを検知することにより,所定時間の経過を検知するものである請求項5に記載の圧縮機。
【請求項8】
前記センサが前記圧縮機を駆動する電動モータに通電する電流値を検出する電流センサを含み,前記時間経過検知手段が,前記圧縮機が停止後に前記電流センサによる検出値がゼロ値になるのを検知することにより,所定時間の経過を検知するものである請求項5に記載の圧縮機。
【請求項9】
前記センサが軽異常と判定された場合に,または前記センサが重異常と判定された場合であって且つ該センサが前記圧縮機の運転上重要なセンサでないと判別された場合に,該センサの検出値が補正されてなる請求項4〜8のいずれかに記載の圧縮機。
【請求項10】
前記センサが重異常と判定された場合であって且つ該センサが前記圧縮機の運転上重要なセンサであると判定された場合に,前記圧縮機の運転停止が継続されてなる請求項5〜9のいずれかに記載の圧縮機。
【請求項11】
前記圧縮機の運転中に,前記異常程度判定手段が前記センサによる検出値と前記規定値とを比較して異常の程度の判定を行い,同様に前記センサ関連要素判別手段が前記センサの関連要素を判別するものである請求項1〜4のいずれかに記載の圧縮機。
【請求項12】
前記異常程度判定手段により判定された結果を前記センサ毎に記憶する判定結果記憶手段を更に備え,
前記判定結果記憶手段が,前記センサについて軽異常と判定された場合に,または前記センサが重異常と判定された場合であって且つ該センサが前記圧縮機の運転上重要なセンサでないと判別された場合に,前記結果を記憶するものであり,前記判定結果記憶手段に記憶された前記結果に従って,前記圧縮機の運転停止中に前記センサの検出値が補正されてなる請求項11に記載の圧縮機。
【請求項13】
前記センサが重異常と判定された場合であって,且つ該センサが前記圧縮機の運転上重要なセンサであると判別された場合に,前記圧縮機の運転を停止するものである請求項11または12に記載の圧縮機。
【請求項14】
前記規定値が,前記センサと同種の予備センサの検出値から定められるものである請求項11〜13のいずれかに記載の圧縮機。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2006−22758(P2006−22758A)
【公開日】平成18年1月26日(2006.1.26)
【国際特許分類】
【出願番号】特願2004−202784(P2004−202784)
【出願日】平成16年7月9日(2004.7.9)
【出願人】(000001199)株式会社神戸製鋼所 (5,860)
【Fターム(参考)】
【公開日】平成18年1月26日(2006.1.26)
【国際特許分類】
【出願日】平成16年7月9日(2004.7.9)
【出願人】(000001199)株式会社神戸製鋼所 (5,860)
【Fターム(参考)】
[ Back to top ]