
圧電アクチュエータによる光ファイバの作動、及び圧電アクチュエータにより生成される電圧の検出
1つの態様の方法が、圧電アクチュエータを機械的に変形させることにより片持ち式光ファイバを作動させるステップを含むことができる。圧電アクチュエータの機械的変形の結果として生成される電気信号を検出することもできる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は圧電アクチュエータに関する。特に、本発明の実施形態は、圧電アクチュエータで片持ち式光ファイバを作動させること、及び圧電アクチュエータにより生成される電圧を検出することの両方に関する。
【背景技術】
【0002】
走査ファイバ装置を使用して画像の取得及び/又は表示を行うことができる。多くの場合走査ファイバ装置は、1次元又は2次元で振動させ、動かし、或いは別様に作動させることができる片持ち式光ファイバを含む。
【0003】
片持ち式光ファイバを作動させる一般的な方法に圧電アクチュエータによるものがある。電圧又はその他の電気作動信号を圧電アクチュエータに印加することができる。印加された電気信号が、アクチュエータの圧電材料の形状を機械的に変形又は変化させることができる。このような機械的変形により、片持ち式光ファイバを作動させることができる。しかしながら、片持ち式光ファイバが意図したように正確に動くように圧電アクチュエータで作動させることは困難な傾向にある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許出願第20060072843号公報
【発明の概要】
【課題を解決するための手段】
【0005】
本発明の実施形態を示すために用いる以下の説明及び添付図面を参照することにより、本発明を最も良く理解することができる。
【図面の簡単な説明】
【0006】
【図1】本発明の実施形態による走査ファイバシステム例のブロック図である。
【図2】本発明の実施形態による走査ファイバ装置の特定例の断面側面図である。
【図3】本発明の実施形態による、圧電アクチュエータで片持ち式光ファイバを作動させ、圧電アクチュエータにより生成される電気信号を検出する方法のブロックフロー図である。
【図4】本発明の実施形態によるベースステーションのブロック図である。
【図5】本発明の実施形態による、アクチュエータドライバをコネクタインターフェイスから電気的に減結合するための第1の構成例のブロック図である。
【図6】本発明の実施形態による、アクチュエータドライバをコネクタインターフェイスから電気的に減結合するための第2の構成例のブロック図である。
【図7】本発明の実施形態による、1フレームの画像構築中に実施できる方法のブロックフロー図である。
【図8】本発明の実施形態による能動的制動のブロックフロー線図である。
【図9】本発明の実施形態による製造の物品のブロックフロー線図である。
【発明を実施するための形態】
【0007】
以下の説明では、数多くの特定の詳細を記載する。しかしながら、これらの特定の詳細を伴わずに本発明の実施形態を実施できることを理解されたい。その他の場合、本説明の理解をあいまいにしないように、公知の回路、構造、及び技術については詳細に示していない。
【0008】
本発明の実施形態では、圧電アクチュエータで片持ち式光ファイバを作動させることに加え、機械的変形に起因して圧電アクチュエータにより生成される電圧又はその他の電気信号を検出することができる。1つの態様では、このような電気信号を使用して、圧電アクチュエータ及び/又は片持ち式光ファイバの位置及び/又は動きを推定することができる。別の態様では、推定される位置及び/又は動きを一種のフィードバックとして使用して片持ち式光ファイバの作動を改善し、片持ち式光ファイバがより意図したように動くようにすることができる。
【0009】
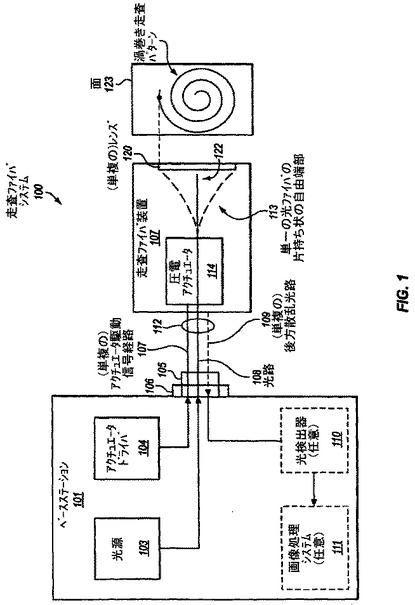
図1は、本発明の実施形態による走査ファイバシステム例100のブロック図である。
走査ファイバシステムは、ベースステーション101と走査ファイバ装置107とを含む2つの部分に分かれた形成要素を有するが、このような2つの部分に分かれた形成要素は必須ではない。走査ファイバ装置は、1又はそれ以上のケーブル112を通じてベースステーションと電気的及び光学的に結合される。詳細には、走査ファイバ装置は、ベースステーションの対応するコネクタインターフェイス106に接続又は嵌合するコネクタ105を含む。
【0010】
ベースステーションは、光路108を通じて走査ファイバ装置に光を供給する光源103を含む。適当な光源の例として、以下に限定されるわけではないが、レーザ、レーザダイオード、垂直空洞表面放射レーザ(VCSEL)、発光ダイオード(LED)、及びこれらの組み合わせが挙げられる。本発明の様々な実施形態例では、光源として、赤色光源、青色光源、緑色光源、赤色−緑色−青色(RGB)光源、白色光源、赤外光源、紫外光源、高強度治療用レーザ光源、又はこれらの組み合わせを挙げることができる。特定の実施構成に応じて、光源は、連続する光の流れ、変調光、又は光パルスの流れを放射することができる。
【0011】
ベースステーションはまた、本明細書でアクチュエータ駆動信号と呼ぶ電圧又はその他の電気信号を走査ファイバ装置に供給するためのアクチュエータドライバ104も含む。1又はそれ以上の駆動信号経路107を通じてアクチュエータ駆動信号を供給することができる。ハードウェア(例えば回路)、ソフトウェア(例えばルーチン又はプログラム)、又はハードウェアとソフトウェアとの組み合わせでアクチュエータドライバを実現することができる。一例として、本発明の1又はそれ以上の実施形態では、アクチュエータドライバは、アクチュエータ駆動信号値を供給することができる、メモリに記憶された1又はそれ以上の参照テーブル又はその他のデータ構造を含むことができる。このアクチュエータ駆動信号値は、Richard S.Johnstonによる「画像内の歪みを低減するための再マッピング法」という名称の米国特許出願第20060072843号に記載されているように較正に基づいて調節できる可能性がある。別の例として、アクチュエータドライバは、アクチュエータ駆動信号値をリアルタイムで生成するためのコンピュータ、プロセッサ、特定用途向け集積回路(ASIC)、又はその他の回路を含むことができる。これらの値はデジタルであってもよく、アクチュエータドライバのデジタル−アナログ変換器にこの値を供給することができる。アクチュエータドライバの1又はそれ以上の増幅器が、アナログバージョンのアクチュエータ駆動信号を増幅することができる。これらは、適当なアクチュエータドライバのほんのいくつかの具体例に過ぎない。
【0012】
走査ファイバ装置107は、単一の光ファイバの片持ち状の自由端部113及び圧電アクチュエータ114を含む。適当な種類の圧電アクチュエータの例として、以下に限定されるわけではないが、圧電管、圧電ビーム、圧電カンチレバー、圧電ディスク、片持ち式光ファイバを作動させることができるその他の圧電材料、装置、又は構造、及びこれらの組み合わせが挙げられる。圧電アクチュエータは圧電材料を含むが、任意に1又はそれ以上の非圧電材料、例えば金属を含むこともできる。
【0013】
圧電アクチュエータは、アクチュエータ駆動信号を受信することができる。圧電アクチュエータは、受信したアクチュエータ駆動信号に基づき、及びこれに応答して片持ち式光ファイバを動かし、振動させ、或いは別様に作動させることができる。圧電材料の特性として、これらの材料が、印加される電界又は信号に対応して機械的に変形し、或いは形状を変化させることができる点が挙げられる。このような機械的な変形又は形状の変化により、片持ち式光ファイバを作動させることができる。本発明の実施形態では、アクチュエータ駆動信号により、圧電アクチュエータが片持ち式光ファイバを2次元走査パターンで動かすようにすることができる。適当な2次元走査パターンの例として、以下に限定されるわけではないが、渦巻き走査パターン、プロペラ走査パターン、リサージュ走査パターン、円形走査パターン、楕円形走査パターン、ラスター走査パターンなどが挙げられる。
【0014】
片持ち式光ファイバは、光源から光を受光することができる。光ファイバが走査されている間に片持ち式光ファイバの遠位端すなわち先端122から光を放射することができる。この放射光を1又はそれ以上のレンズ120を通過させて、走査中の面123を横切って動かすことができる収束ビーム又は照明スポットを生成することができる。例図には渦巻き走査パターンを示しており、点は特定の時点における照明スポットの位置を示している。
【0015】
走査ファイバシステムを使用して、画像を構築することができる。画像を構築するステップは、面上に画像を表示又は形成するステップ、及び/又は面の画像を取得するステップを含むことができる。面上に画像を表示するステップでは、面上に望ましい画像を形成するために、光ファイバの端部から放射される光を走査中に位置に応じて変調してレンズ系を通過させることができる。面の画像を取得するステップでは、走査ファイバ装置は、レンズ系を通じて走査中の面全体にわたって照明スポットを走査することができる。走査中の異なる時点において面からの後方散乱光を取り込み、これを使用して画像を構築することができる。
【0016】
画像取得装置の場合、後方散乱光を集光する様々な方法が考えられる。後方散乱光を集光し、ベースステーションの1又はそれ以上の任意の光検出器110に逆搬送するために、1又はそれ以上の光ファイバ又はその他の後方散乱光路109を任意に含むことができる。或いは、走査ファイバ装置が、その遠位端近くに任意に光検出器を含むことができる。図示のように、光検出器により検出された光に基づいて画像を生成するために、ベースステーションは任意の画像処理システム111を含むことができる。ベースステーションにディスプレイを含め、或いはベースステーションにディスプレイを外部接続することができる。
【0017】
本発明の様々な実施形態では、走査ファイバシステムは、走査ファイバ内視鏡、走査ファイバボロスコープ、走査ファイバ顕微鏡、その他の種類の走査ファイバスコープ、走査ファイババーコードリーダ、走査ファイバ画像表示装置、或いは当業で公知のその他の走査ファイバ画像取得及び/又は表示装置の形をとることができる。周知のように、内視鏡とは、患者の体内に挿入して体腔、管腔内部を調べ、或いは別様に患者の内部を調べるための機器又は装置のことを表す。ほんのいくつか例を挙げれば、以下に限定されるわけではないが、適当な種類の内視鏡の例として気管支鏡、大腸鏡、胃鏡、十二指腸鏡、S字結腸鏡、胸腔鏡、尿管鏡、上顎洞鏡、ボロスコープ、及び胸腔鏡が挙げられる。
【0018】
説明をあいまいにしないように、簡略化したベースステーションを示し、これについて説明している。ベースステーションは他の構成要素を含むこともできると理解されたい。ベースステーションに含めることができるその他の代表的な構成要素として、以下に限定されるわけではないが、電源、ユーザインターフェイス、メモリなどが挙げられる。さらに、ベースステーションは、時計、増幅器、デジタル−アナログ変換器、アナログ−デジタル変換器などの補助構成要素を含むこともできる。
【0019】
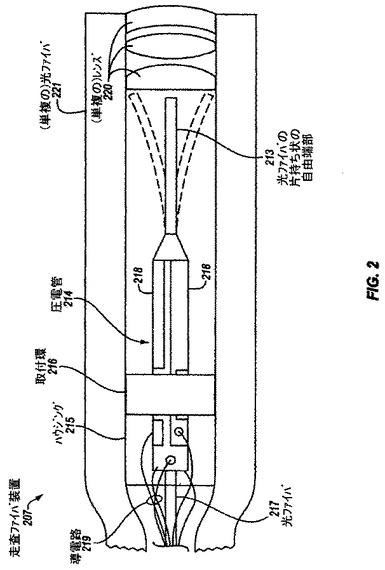
図2は、本発明の実施形態による走査ファイバ装置207の特定例の断面側面図である。この特定の走査ファイバ装置は、内視鏡又はその他の比較的小型の装置としての使用に非常に適するものであるが、その他の実施構成では、設計及び動作が大きく異なってもよい。従って、この特定の走査ファイバ装置は例示的なものに過ぎないと理解されたい。
【0020】
走査ファイバ装置はハウジング215を含む。1又はそれ以上の実施形態では、ハウジングは、比較的小さな密閉されたものであってもよい。例えば、ハウジングは概ね管状であってもよく、約5ミリメートル(mm)以下の直径、及び約20mm以下の長さを有することができる。通常、ハウジングは1又はそれ以上のレンズ220を含む。適当なレンズの例としてPentax社製のものが挙げられるが、その他のレンズを任意に使用してもよい。
【0021】
図示のように、照明スポットからの後方散乱光を集光し、例えばベースステーション内に位置する1又はそれ以上の光検出器に逆搬送するために、ハウジングの外部周辺に1又はそれ以上の光ファイバ221を任意に含めることができる。或いは、走査ファイバ装置の遠位端又はその近くに1又はそれ以上の光検出器を含めるか、或いはこれを完全に省くことができる。
【0022】
1つの考えられる種類の圧電アクチュエータを代表する圧電管214がハウジング内に含まれる。本発明の1又はそれ以上の実施形態では、圧電管がPZT 5A材料を含むことができるが、これは必須ではない。適当な圧電管が、以下に限定されるわけではないが、米国ニュージャージー州フェアフィールドのMorgan Technical Ceramics Sales社、カナダ、オンタリオ州コリングウッドのSensor Technology社、米国マサチューセッツ州オーバーンのPI(Physik Instrumente)L.P.社を含むいくつかの供給元から市販されている。ぴったりと一致する概ね円筒形の取付環の開口部を通じて圧電管を挿入することができる。取付環を使用して圧電管をハウジングに取り付けることもできる。その他の圧電管及びハウジングの構成もまた可能である。
【0023】
光ファイバ217の一部が、圧電管内の概ね円筒形の開口部を通じて挿入される。光ファイバの片持ち状の自由端部213が、ハウジング内で圧電管の端部を超えて延び、この自由端部213を圧電管の端部に、例えば接着剤で取り付けることができる。その他の圧電管及び片持ち式光ファイバの構成もまた可能である。片持ち式光ファイバは撓みやすく、これを圧電管により作動させることができる。
【0024】
圧電管は上部に電極218を有する。電線又はその他の導電路219を電極と電気的に結合して、アクチュエータ駆動信号を電極に伝達する。図示のように、本発明の1つの実施形態例では、圧電管が、その外面に4つの象限金属電極を有することができる。4つの導電路をそれぞれ4つの電極にハンダ付けし、或いは別様に電気結合させることができる。1又はそれ以上の実施形態では、圧電管の内面に任意の接地電極を含めることができる。
【0025】
アクチュエータ駆動信号を受信したことに応答して、電極が圧電管に電界を印加することができる。この電界により、圧電管を機械的に変形させ、或いは形状を変化させることができる。この機械的変形を使用して光ファイバを作動させることができる。4つの象限電極、又は2つの直交電極だけでも、片持ち式光ファイバを2次元走査で動かすことができる。一例として、片持ち式光ファイバを渦巻き走査で動かすために、同じ周波数で振幅が増大する異相正弦波駆動信号を4つの電極の各々に印加することができる。
【0026】
この場合、このような圧電アクチュエータで片持ち式光ファイバを作動させ、正確に意図したように動くようにすることは時として困難な傾向にある。1つの理由として、圧電アクチュエータ及び/又は片持ち式光ファイバが、所定のアクチュエータ駆動信号の組に正確に意図したように反応することができないからである。また、アクチュエータ駆動信号に対する圧電アクチュエータ及び/又は片持ち式光ファイバの反応は、変化する環境条件又はその他の条件により、時間とともに変化する可能性がある。この結果、圧電アクチュエータ及び/又は片持ち式光ファイバの実際の動き及び/又は位置が、予想又は意図したものから逸脱する可能性がある。
【0027】
圧電材料はまた、機械的変形、形状の変化、又はその他の機械的応力に応じて電圧又はその他の電気信号を生成する能力も有する。本発明の実施形態では、光ファイバの作動に関連する動きの結果としての機械的変形に起因して圧電アクチュエータにより生成される電圧又はその他の電気信号をリアルタイムで検出することができる。1つの態様では、このような電気信号を使用して圧電アクチュエータ及び/又は片持ち式光ファイバの位置及び/又は動きを推定することができる。別の態様では、この推定された位置及び/又は動きを一種のフィードバックとして使用して、片持ち式光ファイバがより意図した通りに動くようにその作動を改善することができる。
【0028】
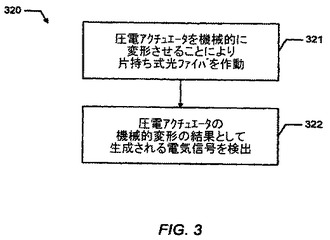
図3は、本発明の実施形態による、片持ち式光ファイバを圧電アクチュエータで作動させ、圧電アクチュエータにより生成される電圧又はその他の電気信号を検出する方法320のブロックフロー図である。
【0029】
最初にブロック321において、圧電アクチュエータを機械的に変形させることにより、片持ち式光ファイバを作動させることができる。前述したように、このステップは、本明細書ではアクチュエータ駆動信号と呼ぶ電気信号を圧電アクチュエータに印加するステップを含むことができる。印加されたアクチュエータ駆動信号に応じて圧電アクチュエータを機械的に変形させることができる。この圧電アクチュエータの機械的変形により、片持ち式光ファイバを作動させることができる。本発明の1又はそれ以上の実施形態では、片持ち式光ファイバを作動させるステップは、例えば共振周波数又はその近く、例えばQ係数内などで片持ち式光ファイバを振動させるステップを含むことができる。
【0030】
次に、ブロック322において、圧電アクチュエータの機械的変形の結果として生成される電圧又はその他の電気信号を検出することができる。片持ち式光ファイバの現在の又は以前の作動の結果として、圧電アクチュエータは、片持ち式光ファイバが渦巻き走査パターンを辿ったときの圧電管の偏向などの機械的変形を受けることができる。この機械的変形により、圧電アクチュエータが電圧又はその他の電気信号を生成するようになる。これらの電気信号をベースステーションに逆搬送するとともに、例えば電圧検出器を使用して検出することができる。
【0031】
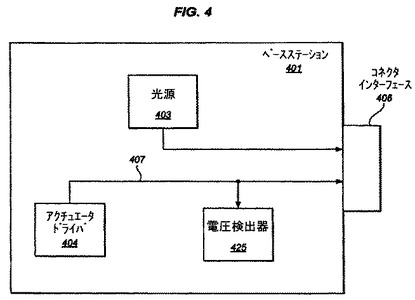
図4は、本発明の実施形態によるベースステーション401のブロック図である。ベースステーション及びその構成要素は、図1の対応して名前を付けた構成要素の特性のいくつか又は全てを任意に有することができる。説明をあいまいにしないように、以下の説明は、主に異なる又は追加の特性に焦点を置いて行う。
【0032】
ベースステーションは、走査ファイバ装置を接続できるようにするコネクタインターフェイス406を含む。ベースステーションの光源403が、コネクタインターフェイスと光学的に結合される。光源は、コネクタインターフェイスを介して走査ファイバ装置に光を供給することができる。ベースステーションはまた、アクチュエータドライバ404も含む。アクチュエータドライバは、コネクタインターフェイスを介して走査ファイバ装置の圧電アクチュエータにアクチュエータ駆動信号を供給することができる。
【0033】
ベースステーションはまた、少なくとも1つの電圧検出器425も含む。電圧検出器は、電圧、例えば走査ファイバ装置の圧電アクチュエータの機械的変形により生成される電圧を検出することができ、コネクタインターフェイスを介してこの電圧をベースステーションに戻すことができる。一例として、図2に示すような圧電管の場合、数ボルトから(約30ボルトなどの)数十ボルトの範囲にわたる電圧を検出するように電圧検出器を構成することができる。しかしながら、その他のサイズ及び種類の圧電アクチュエータにはその他の範囲を適用することができる。
【0034】
例示の実施形態では、アクチュエータドライバから圧電アクチュエータへの少なくとも1つのアクチュエータ駆動信号経路407に電圧検出器が任意に電気的に結合される。或いは、電圧検出器から圧電アクチュエータへの少なくとも1つの専用の電圧検出経路を任意に含めることができる。圧電管の駆動に使用する同じ電極を使用してもよいし、或いは圧電アクチュエータ上に追加の専用の電圧検出電極を含めてもよい。
【0035】
本発明の1又はそれ以上の実施形態では、圧電アクチュエータへの複数の経路に電圧検出器を少なくとも切り替え可能に電気的に結合することができる。本発明の1又はそれ以上の実施形態では、圧電アクチュエータの4つの全側面(頂面、底面、右面、及び左面)、又は2つの直交する側面(例えば、垂直な側面及び水平な側面)などの、複数の異なる側面に通じる経路に電圧検出器を少なくとも切り替え可能に電気的に結合することができる。少なくとも2つの直交する側面に関連する電圧を検出することにより、2次元の位置及び/又は動きに関する情報を提供するという潜在的な利点をもたらすことができる。本発明の1又はそれ以上の実施形態では、電圧を検出すべき個々の電極のための専用の電圧検出器をベースステーションに含めることができる。或いは、スイッチを使用して共通の電圧検出器に電極を交互に切り替え可能に結合することができる。
【0036】
本明細書では、「結合された」及び「接続された」という用語をこれらの派生語とともに使用している。これらの用語は、互いに同義語として意図されるものではない。より正確に言えば、「接続された」は、2又はそれ以上の要素が互いに直接的に物理的又は電気的な接触状態にあることを示すために使用することができる。「結合された」は、2又はそれ以上の要素が直接的に物理的又は電気的な接触状態にあることを意味することができる。しかしながら、「結合された」は、2又はそれ以上の要素が互いに直接的な接触状態にはないが、なおも互いに物理的、電気的、又は光学的に協動又は相互作用することを意味することもできる。
【0037】
本発明の1又はそれ以上の実施形態では、電圧検出器が圧電アクチュエータにより生成された電圧を検出する間に、アクチュエータドライバを圧電アクチュエータから電気的に減結合することができる。アクチュエータドライバを圧電アクチュエータから減結合することにより、機械的変形に起因して圧電アクチュエータにより生成された電圧又はその他の電気信号の修正を防ぎ、又は少なくとも低減させる役に立つことができる。アクチュエータドライバを圧電アクチュエータから減結合することにより、圧電アクチュエータにより生成されたこのような電圧又はその他の電気信号がアクチュエータドライバへ逆漏れ又は逆散逸するのを低減させる役に立つこともできる。
【0038】
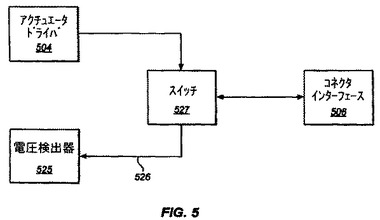
図5は、本発明の実施形態による、アクチュエータドライバ504をコネクタインターフェイス506から電気的に減結合するための第1の構成例のブロック図である。この第1の方法では、アクチュエータドライバとコネクタインターフェイスとの間、かつ電圧検出器525とコネクタインターフェイスとの間にスイッチ527が電気的に結合される。適当なスイッチの例として、以下に限定されるわけではないが、個別部品スイッチ、集積回路スイッチ、及びこれらの組み合わせが含まれる。図示のように、アクチュエータドライバの出力がスイッチと電気的に結合される。電圧検出器の入力がスイッチと電気的に結合される。スイッチはコネクタインターフェイスと電気的に結合される。スイッチは、アクチュエータドライバをコネクタインターフェイスと切り替え可能に電気的に結合したり、或いは結合しなかったりするように動作可能である。スイッチはまた、電圧検出器をコネクタインターフェイスと切り替え可能に電気的に結合したり、或いは結合しなかったりするようにも動作可能である。一例として、コントローラをスイッチに電気的に結合するとともに、コントローラからの制御信号に応じて切り替わるようにスイッチを制御することができる。アクチュエータドライバ又は電圧検出器の両方ではなくいずれかを、コネクタインターフェイスと電気的に結合することができる。このようにして、電圧検出器は、アクチュエータドライバがコネクタインターフェイスから減結合され、従って圧電アクチュエータからも減結合されている間に、圧電アクチュエータにより生成されコネクタインターフェイスを介して戻される電圧を検出することができる。
【0039】
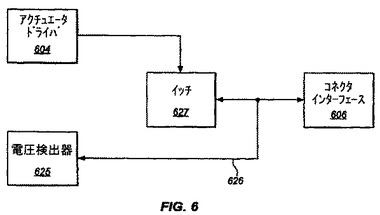
他の設定もまた可能である。図6は、本発明の実施形態による、アクチュエータドライバ604をコネクタインターフェイス606から電気的に減結合するための第2の構成例のブロック図である。この第2の方法は、電圧検出器625が、コネクタインターフェイスと固定して(切り替え可能にではなく)電気的に結合される点を除き、前述した第1の方法と同様である。アクチュエータドライバのみが、スイッチ627を介してコネクタインターフェイスと切り替え可能に電気的に結合される。電圧検出器は、アクチュエータドライバがコネクタインターフェイスから電気的に減結合された場合だけでなく、アクチュエータドライバがコネクタインターフェイスと電気的に結合された場合にも電圧を検出することができる。アクチュエータドライバがコネクタインターフェイスから電気的に減結合された場合に検出される電圧を使用できるのに対し、アクチュエータドライバがコネクタインターフェイスと電気的に結合された場合に検出される電圧は、潜在的に破棄又は無視することができる。
【0040】
本発明の1又はそれ以上の実施形態では、図5の電圧検出器525とスイッチ527との間の線526が高インピーダンスを有することができる。同様に、本発明の1又はそれ以上の実施形態では、図6の電圧検出器625とコネクタインターフェイス606との間の線626も高インピーダンスを有することができる。この高インピーダンスが電流の流れに抵抗を与えることにより、圧電アクチュエータにより生成される電圧を過度に急速に枯渇させることなく検出できるようにする役に立つことができる。一例として、高インピーダンス線は、少なくとも1メガオームのインピーダンスを有することができる。1つの態様では、高インピーダンスを与えるために高インピーダンス増幅器を含めることができる。
【0041】
1又はそれ以上の実施形態では、検出された電圧又はその他の電気信号を使用して、圧電アクチュエータ及び/又は片持ち式光ファイバの位置及び/又は動きを推定することができる。一般に、電圧又はその他の電気信号の大きさは、圧電アクチュエータの機械的変形の量に直接関連する。この結果、電圧又はその他の電気信号が圧電アクチュエータの位置及び/又は動きに関する情報を含み、これを使用して圧電アクチュエータ及び/又は片持ち式光ファイバの位置及び/又は動きを推定することができる。本発明の1又はそれ以上の実施形態では、この後、検出された電圧に少なくとも部分的に基づいて圧電アクチュエータを作動させることができる。すなわち、検出された電圧が、さらなる作動を導く一種のフィードバックとしての役割を果たすことができる。以下でさらに説明するが、能動的駆動中、又は走査の終了時における制動中に、この情報又はフィードバックを使用することができる。
【0042】
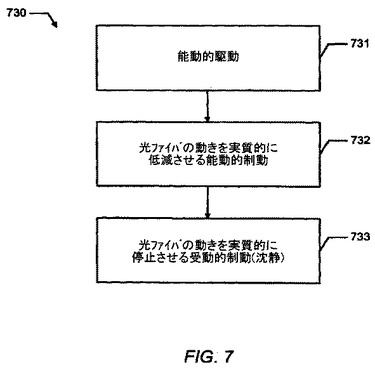
図7は、本発明の実施形態による、1フレームの画像構築中に実施できる方法730のブロックフロー図である。
【0043】
最初にブロック731において、能動的駆動を行うことができる。この能動的駆動は、実質的に前述したように行うことができる。特に能動的駆動中には、圧電アクチュエータが走査に従って片持ち式光ファイバを作動させるようにするために、圧電アクチュエータにアクチュエータ駆動信号を印加することができる。
【0044】
次に、走査後、ブロック732において能動的制動を行うことができる。能動的制動は、圧電アクチュエータが片持ち式光ファイバの動きを実質的に低減させる方法で片持ち式光ファイバを作動させるようにするアクチュエータ駆動信号を圧電アクチュエータに印加するステップを含むことができる。本明細書で使用する場合、片持ち式光ファイバの動きを実質的に低減させるステップは、片持ち式光ファイバの動きを少なくとも50%低減させることを意味する。一例として、渦巻き走査の場合、能動的駆動中に使用されるアクチュエータ駆動信号と同様のものではあるが、相対的に約180°位相ずれし、潜在的に大きな又は小さな振幅のいずれかを有する信号を能動的制動に使用することができる。作動を使用して、片持ち式光ファイバの動きを増大させるか、或いは低減させるかのいずれかを行うことができることに留意されたい。
【0045】
次にブロック733において、能動的制動の後に受動的制動(沈静)を行うことができる。受動的制動は、片持ち式光ファイバが沈静し、或いは実質的に動きを停止できるようになるまでの期間、ただ待機するだけのステップを含むことができる。このステップにより、片持ち式光ファイバを次のフレームの画像構築に向けて準備することができる。1つの態様では、この方法は、各フレームにつき一度、所定のフレームレートでブロック731〜733を通じて任意に反復することができる。
【0046】
一般に、能動的制動は、受動的制動よりも片持ち式光ファイバの動きを急速に低減させることができる。例示的ではあるが非限定的な例として、約8サイクルの能動的制動により、片持ち式光ファイバの動きの約80%を除去できるのに対し、残りの20%の動きを除去するのに約50サイクル以上の受動的制動を要する場合がある。これらの数値は、実施構成ごとに様々であってもよい。
【0047】
フレームレートの増加を促進するには、多くの場合能動的制動が望ましい。しかしながら、能動的制動の終了に向けて圧電アクチュエータ及び/又は片持ち式光ファイバの位置及び/又は動きを正確に把握するのは困難な傾向にある。さらに、位置及び/又は動きが予想したものと異なる場合、能動的制動は、片持ち式光ファイバの動きを減少させるよりもむしろ、片持ち式光ファイバの動きを意図せずに増大させる可能性がある。この結果、能動的制動が時期尚早に、すなわち望ましいものとなるよりも早く停止される可能性がある。
【0048】
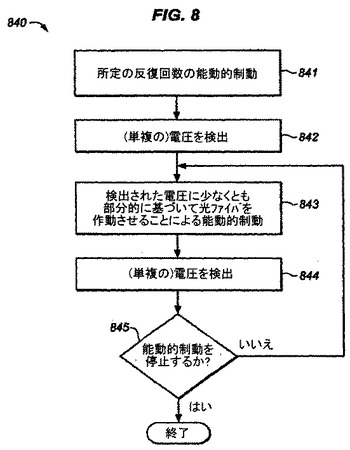
本発明の1又はそれ以上の実施形態では、圧電アクチュエータにより生成される電圧又はその他の電気信号を検出し、これを能動的制動中に使用することができる。図8は、本発明の実施形態による能動的制動の方法840のブロックフロー図である。
【0049】
最初にブロック841において、従来の能動的制動を任意に所定の反復回数行うことができる。この所定の回数は、片持ち式光ファイバの動きがさらなる能動的制動で予測不能になり始める反復回数未満であってもよい。一例として、この所定の数は、片持ち式光ファイバの動きの約30%から80%を低減させるようなものであってもよい。別の例として、所定の反復回数は1回の反復であってもよい。
【0050】
次にブロック842において、動きに関連する機械的変形又は応力の結果として圧電アクチュエータにより生成される1又はそれ以上の電圧を検出することができる。これらの電圧は、前述したように検出することができる。
【0051】
次にブロック843において、1又はそれ以上の検出された電圧に少なくとも部分的に基づいて片持ち式光ファイバを作動させることにより、能動的制動を行うことができる。すなわち、検出された電圧を一種のフィードバックとして使用して、次の作動を行う方法を調節することができる。本発明の1又はそれ以上の実施形態では、この調節は、検出された電圧に少なくとも部分的に基づいてアクチュエータ駆動信号を決定するステップと、決定されたアクチュエータ駆動信号を圧電アクチュエータに印加して能動的制動を行うステップとを含むことができる。
【0052】
この調節は、いくつかの潜在的な利点をもたらすことができる。一例を挙げると、この調節は、片持ち式光ファイバの能動的制動の改善に役立つことができる。別の例を挙げると、この調節は、能動的制動が、片持ち式光ファイバの動きを(低減させるのではなく)増大させるという影響を意図せずに及ぼすような状況を避けるのに役立つことができる。さらに別の例を挙げると、この調節は、電圧が検出されなかった場合に能動的制動を一般的に可能な時間よりも長い時間行えるようにする役に立つことができる。
【0053】
次に、ブロック844において、動きに関係する機械的変形又は応力の結果として圧電アクチュエータにより生成される1又はそれ以上の電圧を再び検出することができる。これらの電圧は、前述したように検出することができる。
【0054】
次にブロック845において、能動的制動を停止すべきか否かの決定を行うことができる。本発明の1又はそれ以上の実施形態では、ブロック844からの1又はそれ以上の検出された電圧に基づいてこの決定を行うことができる。例えば、ブロック844において検出された電圧がブロック842において検出された対応する電圧よりも高いか又はこれに等しい場合、或いは検出された電圧が、ブロック843における能動的制動により動きの増大が生じたことを別様に示していると思われる場合、能動的制動を停止すると決定することができる。その他の場合には、能動的制動を継続すると決定することができる。
【0055】
ブロック845において決定を行う他の方法もまた可能である。例えば、本発明の1又はそれ以上の実施形態では、ブロック843における能動的制動が行われた回数の総数が所定の数に等しいか、或いはこれよりも大きいかの判定を行うことができる。総数が所定の数に等しいか、或いはこれよりも大きい場合、能動的制動を停止すると決定することができる。その他の場合には、能動的制動を継続すると決定することができる。これらはほんのいくつかの具体例に過ぎない。
【0056】
ブロック845における決定が「いいえ」である(すなわち、能動的制動を停止すると決定された)場合、方法はブロック843を再訪することができる。その他の場合には、方法はブロック846において終了することができる。
【0057】
ある概念を例示するために特定の方法を示し説明したが、本発明の範囲はこの特定の方法に限定されるものではない。一例として、従来の能動的制動を所定の反復回数行った後ではなく、能動的制動全体を通じて電圧を検出することができる。別の例として、この方法を所定の回数単純に繰り返すことを容認して、ブロック845における決定を任意に省略することができる。さらに別の例として、検出された電圧に基づく能動的制動ではなく、従来の能動的制動のみを行うこともできる。代わりに、検出された電圧を使用して、例えば動きの増大が検出された場合、従来の能動的制動をいつ停止するのかを決定することができる。上述した方法の様々な他の修正もまた企図される。
【0058】
本発明の1又はそれ以上の実施形態によれば、今度は上記と同様に、或いは上記とは別に能動的駆動中に電圧を検出し使用することができる。一例として、例えば渦巻き走査の終了時などの走査の終了時に1又はそれ以上の電圧を検出することができる。この1又はそれ以上の検出された電圧を使用して、渦巻き走査の最大直径を推定し、或いは別様に走査の範囲又は合焦レベルを推定することができる。次に、適切な場合、位置及び/又は動きを予想又は意図したものに近づけるのに役立てるために、1又はそれ以上の検出された電圧に少なくとも部分的に基づいて、次の走査中に使用するアクチュエータ駆動信号を決定することができる。例えば、アクチュエータ駆動電圧を増大させて渦巻き直径を増加させたり、或いはアクチュエータ駆動電圧を低減させて渦巻き直径を減少させたりすることができる。別の例として、(円形渦巻きが望ましい時に)楕円形渦巻きが検出された場合、幅狭の方の軸にかかる電圧に対して幅広の方の軸にかかる電圧を低減させて楕円をより円形にすることができる。検出された電圧に関するその他の用途もまた企図される。例えば、検出された電圧を使用して、画像の再マッピングを行い、或いは走査ファイバシステムを使用して構築された画像を別様に調節することができる。当業者にはさらなる他の用途が明らかとなり、本開示の利益を有することになるであろう。
【0059】
図9は、本発明の実施形態による、製造の物品950のブロックフロー図である。この製造の物品は機械可読媒体952を含む。適当な種類の機械可読媒体の例として、以下に限定されるわけではないが、フロッピーディスケット、光記憶媒体、光ディスク、CD−ROM、磁気ディスク、光磁気ディスク、読み取り専用メモリ(ROM)、プログラム可能ROM(PROM)、消去及びプログラム可能ROM(EPROM)、電気消去及びプログラム可能ROM(EEPROM)、ランダムアクセスメモリ(RAM)、スタティックRAM(SRAM)、ダイナミックRAM(DRAM)、フラッシュメモリ、その他の機械可読媒体、及びこれらの組み合わせが挙げられる。
【0060】
機械可読媒体は、機械による読み取りが可能である。ほんの数例を挙げると、以下に限定されるわけではないが、適当な機械の例として、ベースステーション、内視鏡ベースステーション、走査ファイバシステム、走査ファイバ画像取得システム、走査ファイバ画像表示システム、医療機器、コンピュータシステム、及び1又はそれ以上のプロセッサ又は処理回路を有する様々なその他の装置が挙げられる。
【0061】
機械により実行された場合に、本明細書に開示する1又はそれ以上の動作又は方法を機械に実行させる命令954が、機械可読媒体内及び/又は機械可読媒体上に記憶又は別様に提供される。例えば、この命令は、機械により実行された場合、1又はそれ以上の検出された電圧又はその他の電気信号に基づいて、片持ち式光ファイバ及び/又は圧電アクチュエータの位置及び/又は動きを機械に推定させることができる。別の例として、この命令は、機械により実行された場合、1又はそれ以上の検出された電圧又はその他の電気信号に少なくとも部分的に基づいて作動及び/又はアクチュエータ駆動信号を機械に決定させることができる。
【0062】
この機械は、検出された電圧に少なくとも部分的に基づいて、圧電アクチュエータ及び圧電アクチュエータに結合された片持ち式光ファイバの一方又は両方の位置を推定する位置推定ユニットを含むことができる。この機械は、検出された電圧に少なくとも部分的に基づいてアクチュエータ駆動信号を決定するアクチュエータ駆動信号決定ユニットを含むこともできる。これらのユニットの各々は、ソフトウェア、ハードウェア、又はこれらの組み合わせを使用して実装することができる手段である。
【0063】
上記の説明では、本発明の実施形態を完全に理解できるようにするために、説明目的で数多くの特定の詳細について記載した。説明した特定の実施形態は、本発明を限定するものではなく、例示する目的で提供したものである。これらの特定の詳細のいくつかを伴わずに実施形態を実施することができる。さらに、本明細書で開示する実施形態、例えばこれらの実施形態の構成要素の構成、機能、及び動作方法などに修正を加えることができる。図面に示し及び本明細書で説明したものとの全ての同等関係が本発明の実施形態に含まれる。本発明の範囲は、上記に示した特定の例ではなく、下記の特許請求の範囲により決定すべきである。
【0064】
様々な動作及び方法について説明した。これらの方法について基本的な形で説明したが、これらの方法に任意に動作を追加することができる。場合によっては、これらの方法から動作を削除することができる。場合によっては、これらの方法の動作を異なる順序で行うことができる。これらの方法に多くの修正及び適合を行うことができ、これらは可能であるとともに企図される。
【0065】
なお、本明細書を通じて、「1つの実施形態」、「実施形態」、又は「1又はそれ以上の実施形態」への言及は、例えば、本発明の実施に特定の特徴を含めることができることを意味するものであると理解されたい。同様に、本開示を簡略化し、様々な発明の態様の理解に役立てる目的で、説明には、様々な特徴を単一の実施形態、図又はその説明にまとめた部分があることを理解されたい。しかしながら、本開示方法について、本発明が、個々の請求項に明記したよりも多くの特徴を必要とするという意図を反映したものであると解釈すべきではない。むしろ、以下の特許請求の範囲が示すように、本発明の態様は、単一の開示した実施形態の全ての特徴よりも少ないものにより成立することができる。従って、詳細な説明に続く特許請求の範囲は、本明細書によりこの詳細な説明に明確に組み入れられ、個々の請求項は、それ自体が本発明の独立した実施形態として成立するものである。
【符号の説明】
【0066】
100 走査ファイバシステム
101 ベースステーション
103 光源
104 アクチュエータドライバ
105 コネクタ
106 コネクタインターフェース
107 走査ファイバ装置
107 (単複の)アクチュエータ駆動信号経路
108 光路
109 (単複の)後方散乱光路
110 光検出器(任意)
111 画像処理システム(任意)
112 ケーブル
113 単一の光ファイバの片持ち状の自由端部
114 圧電アクチュエータ
120 (単複の)レンズ
122 片持ち式光ファイバの先端
123 面
【技術分野】
【0001】
本発明の実施形態は圧電アクチュエータに関する。特に、本発明の実施形態は、圧電アクチュエータで片持ち式光ファイバを作動させること、及び圧電アクチュエータにより生成される電圧を検出することの両方に関する。
【背景技術】
【0002】
走査ファイバ装置を使用して画像の取得及び/又は表示を行うことができる。多くの場合走査ファイバ装置は、1次元又は2次元で振動させ、動かし、或いは別様に作動させることができる片持ち式光ファイバを含む。
【0003】
片持ち式光ファイバを作動させる一般的な方法に圧電アクチュエータによるものがある。電圧又はその他の電気作動信号を圧電アクチュエータに印加することができる。印加された電気信号が、アクチュエータの圧電材料の形状を機械的に変形又は変化させることができる。このような機械的変形により、片持ち式光ファイバを作動させることができる。しかしながら、片持ち式光ファイバが意図したように正確に動くように圧電アクチュエータで作動させることは困難な傾向にある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許出願第20060072843号公報
【発明の概要】
【課題を解決するための手段】
【0005】
本発明の実施形態を示すために用いる以下の説明及び添付図面を参照することにより、本発明を最も良く理解することができる。
【図面の簡単な説明】
【0006】
【図1】本発明の実施形態による走査ファイバシステム例のブロック図である。
【図2】本発明の実施形態による走査ファイバ装置の特定例の断面側面図である。
【図3】本発明の実施形態による、圧電アクチュエータで片持ち式光ファイバを作動させ、圧電アクチュエータにより生成される電気信号を検出する方法のブロックフロー図である。
【図4】本発明の実施形態によるベースステーションのブロック図である。
【図5】本発明の実施形態による、アクチュエータドライバをコネクタインターフェイスから電気的に減結合するための第1の構成例のブロック図である。
【図6】本発明の実施形態による、アクチュエータドライバをコネクタインターフェイスから電気的に減結合するための第2の構成例のブロック図である。
【図7】本発明の実施形態による、1フレームの画像構築中に実施できる方法のブロックフロー図である。
【図8】本発明の実施形態による能動的制動のブロックフロー線図である。
【図9】本発明の実施形態による製造の物品のブロックフロー線図である。
【発明を実施するための形態】
【0007】
以下の説明では、数多くの特定の詳細を記載する。しかしながら、これらの特定の詳細を伴わずに本発明の実施形態を実施できることを理解されたい。その他の場合、本説明の理解をあいまいにしないように、公知の回路、構造、及び技術については詳細に示していない。
【0008】
本発明の実施形態では、圧電アクチュエータで片持ち式光ファイバを作動させることに加え、機械的変形に起因して圧電アクチュエータにより生成される電圧又はその他の電気信号を検出することができる。1つの態様では、このような電気信号を使用して、圧電アクチュエータ及び/又は片持ち式光ファイバの位置及び/又は動きを推定することができる。別の態様では、推定される位置及び/又は動きを一種のフィードバックとして使用して片持ち式光ファイバの作動を改善し、片持ち式光ファイバがより意図したように動くようにすることができる。
【0009】
図1は、本発明の実施形態による走査ファイバシステム例100のブロック図である。
走査ファイバシステムは、ベースステーション101と走査ファイバ装置107とを含む2つの部分に分かれた形成要素を有するが、このような2つの部分に分かれた形成要素は必須ではない。走査ファイバ装置は、1又はそれ以上のケーブル112を通じてベースステーションと電気的及び光学的に結合される。詳細には、走査ファイバ装置は、ベースステーションの対応するコネクタインターフェイス106に接続又は嵌合するコネクタ105を含む。
【0010】
ベースステーションは、光路108を通じて走査ファイバ装置に光を供給する光源103を含む。適当な光源の例として、以下に限定されるわけではないが、レーザ、レーザダイオード、垂直空洞表面放射レーザ(VCSEL)、発光ダイオード(LED)、及びこれらの組み合わせが挙げられる。本発明の様々な実施形態例では、光源として、赤色光源、青色光源、緑色光源、赤色−緑色−青色(RGB)光源、白色光源、赤外光源、紫外光源、高強度治療用レーザ光源、又はこれらの組み合わせを挙げることができる。特定の実施構成に応じて、光源は、連続する光の流れ、変調光、又は光パルスの流れを放射することができる。
【0011】
ベースステーションはまた、本明細書でアクチュエータ駆動信号と呼ぶ電圧又はその他の電気信号を走査ファイバ装置に供給するためのアクチュエータドライバ104も含む。1又はそれ以上の駆動信号経路107を通じてアクチュエータ駆動信号を供給することができる。ハードウェア(例えば回路)、ソフトウェア(例えばルーチン又はプログラム)、又はハードウェアとソフトウェアとの組み合わせでアクチュエータドライバを実現することができる。一例として、本発明の1又はそれ以上の実施形態では、アクチュエータドライバは、アクチュエータ駆動信号値を供給することができる、メモリに記憶された1又はそれ以上の参照テーブル又はその他のデータ構造を含むことができる。このアクチュエータ駆動信号値は、Richard S.Johnstonによる「画像内の歪みを低減するための再マッピング法」という名称の米国特許出願第20060072843号に記載されているように較正に基づいて調節できる可能性がある。別の例として、アクチュエータドライバは、アクチュエータ駆動信号値をリアルタイムで生成するためのコンピュータ、プロセッサ、特定用途向け集積回路(ASIC)、又はその他の回路を含むことができる。これらの値はデジタルであってもよく、アクチュエータドライバのデジタル−アナログ変換器にこの値を供給することができる。アクチュエータドライバの1又はそれ以上の増幅器が、アナログバージョンのアクチュエータ駆動信号を増幅することができる。これらは、適当なアクチュエータドライバのほんのいくつかの具体例に過ぎない。
【0012】
走査ファイバ装置107は、単一の光ファイバの片持ち状の自由端部113及び圧電アクチュエータ114を含む。適当な種類の圧電アクチュエータの例として、以下に限定されるわけではないが、圧電管、圧電ビーム、圧電カンチレバー、圧電ディスク、片持ち式光ファイバを作動させることができるその他の圧電材料、装置、又は構造、及びこれらの組み合わせが挙げられる。圧電アクチュエータは圧電材料を含むが、任意に1又はそれ以上の非圧電材料、例えば金属を含むこともできる。
【0013】
圧電アクチュエータは、アクチュエータ駆動信号を受信することができる。圧電アクチュエータは、受信したアクチュエータ駆動信号に基づき、及びこれに応答して片持ち式光ファイバを動かし、振動させ、或いは別様に作動させることができる。圧電材料の特性として、これらの材料が、印加される電界又は信号に対応して機械的に変形し、或いは形状を変化させることができる点が挙げられる。このような機械的な変形又は形状の変化により、片持ち式光ファイバを作動させることができる。本発明の実施形態では、アクチュエータ駆動信号により、圧電アクチュエータが片持ち式光ファイバを2次元走査パターンで動かすようにすることができる。適当な2次元走査パターンの例として、以下に限定されるわけではないが、渦巻き走査パターン、プロペラ走査パターン、リサージュ走査パターン、円形走査パターン、楕円形走査パターン、ラスター走査パターンなどが挙げられる。
【0014】
片持ち式光ファイバは、光源から光を受光することができる。光ファイバが走査されている間に片持ち式光ファイバの遠位端すなわち先端122から光を放射することができる。この放射光を1又はそれ以上のレンズ120を通過させて、走査中の面123を横切って動かすことができる収束ビーム又は照明スポットを生成することができる。例図には渦巻き走査パターンを示しており、点は特定の時点における照明スポットの位置を示している。
【0015】
走査ファイバシステムを使用して、画像を構築することができる。画像を構築するステップは、面上に画像を表示又は形成するステップ、及び/又は面の画像を取得するステップを含むことができる。面上に画像を表示するステップでは、面上に望ましい画像を形成するために、光ファイバの端部から放射される光を走査中に位置に応じて変調してレンズ系を通過させることができる。面の画像を取得するステップでは、走査ファイバ装置は、レンズ系を通じて走査中の面全体にわたって照明スポットを走査することができる。走査中の異なる時点において面からの後方散乱光を取り込み、これを使用して画像を構築することができる。
【0016】
画像取得装置の場合、後方散乱光を集光する様々な方法が考えられる。後方散乱光を集光し、ベースステーションの1又はそれ以上の任意の光検出器110に逆搬送するために、1又はそれ以上の光ファイバ又はその他の後方散乱光路109を任意に含むことができる。或いは、走査ファイバ装置が、その遠位端近くに任意に光検出器を含むことができる。図示のように、光検出器により検出された光に基づいて画像を生成するために、ベースステーションは任意の画像処理システム111を含むことができる。ベースステーションにディスプレイを含め、或いはベースステーションにディスプレイを外部接続することができる。
【0017】
本発明の様々な実施形態では、走査ファイバシステムは、走査ファイバ内視鏡、走査ファイバボロスコープ、走査ファイバ顕微鏡、その他の種類の走査ファイバスコープ、走査ファイババーコードリーダ、走査ファイバ画像表示装置、或いは当業で公知のその他の走査ファイバ画像取得及び/又は表示装置の形をとることができる。周知のように、内視鏡とは、患者の体内に挿入して体腔、管腔内部を調べ、或いは別様に患者の内部を調べるための機器又は装置のことを表す。ほんのいくつか例を挙げれば、以下に限定されるわけではないが、適当な種類の内視鏡の例として気管支鏡、大腸鏡、胃鏡、十二指腸鏡、S字結腸鏡、胸腔鏡、尿管鏡、上顎洞鏡、ボロスコープ、及び胸腔鏡が挙げられる。
【0018】
説明をあいまいにしないように、簡略化したベースステーションを示し、これについて説明している。ベースステーションは他の構成要素を含むこともできると理解されたい。ベースステーションに含めることができるその他の代表的な構成要素として、以下に限定されるわけではないが、電源、ユーザインターフェイス、メモリなどが挙げられる。さらに、ベースステーションは、時計、増幅器、デジタル−アナログ変換器、アナログ−デジタル変換器などの補助構成要素を含むこともできる。
【0019】
図2は、本発明の実施形態による走査ファイバ装置207の特定例の断面側面図である。この特定の走査ファイバ装置は、内視鏡又はその他の比較的小型の装置としての使用に非常に適するものであるが、その他の実施構成では、設計及び動作が大きく異なってもよい。従って、この特定の走査ファイバ装置は例示的なものに過ぎないと理解されたい。
【0020】
走査ファイバ装置はハウジング215を含む。1又はそれ以上の実施形態では、ハウジングは、比較的小さな密閉されたものであってもよい。例えば、ハウジングは概ね管状であってもよく、約5ミリメートル(mm)以下の直径、及び約20mm以下の長さを有することができる。通常、ハウジングは1又はそれ以上のレンズ220を含む。適当なレンズの例としてPentax社製のものが挙げられるが、その他のレンズを任意に使用してもよい。
【0021】
図示のように、照明スポットからの後方散乱光を集光し、例えばベースステーション内に位置する1又はそれ以上の光検出器に逆搬送するために、ハウジングの外部周辺に1又はそれ以上の光ファイバ221を任意に含めることができる。或いは、走査ファイバ装置の遠位端又はその近くに1又はそれ以上の光検出器を含めるか、或いはこれを完全に省くことができる。
【0022】
1つの考えられる種類の圧電アクチュエータを代表する圧電管214がハウジング内に含まれる。本発明の1又はそれ以上の実施形態では、圧電管がPZT 5A材料を含むことができるが、これは必須ではない。適当な圧電管が、以下に限定されるわけではないが、米国ニュージャージー州フェアフィールドのMorgan Technical Ceramics Sales社、カナダ、オンタリオ州コリングウッドのSensor Technology社、米国マサチューセッツ州オーバーンのPI(Physik Instrumente)L.P.社を含むいくつかの供給元から市販されている。ぴったりと一致する概ね円筒形の取付環の開口部を通じて圧電管を挿入することができる。取付環を使用して圧電管をハウジングに取り付けることもできる。その他の圧電管及びハウジングの構成もまた可能である。
【0023】
光ファイバ217の一部が、圧電管内の概ね円筒形の開口部を通じて挿入される。光ファイバの片持ち状の自由端部213が、ハウジング内で圧電管の端部を超えて延び、この自由端部213を圧電管の端部に、例えば接着剤で取り付けることができる。その他の圧電管及び片持ち式光ファイバの構成もまた可能である。片持ち式光ファイバは撓みやすく、これを圧電管により作動させることができる。
【0024】
圧電管は上部に電極218を有する。電線又はその他の導電路219を電極と電気的に結合して、アクチュエータ駆動信号を電極に伝達する。図示のように、本発明の1つの実施形態例では、圧電管が、その外面に4つの象限金属電極を有することができる。4つの導電路をそれぞれ4つの電極にハンダ付けし、或いは別様に電気結合させることができる。1又はそれ以上の実施形態では、圧電管の内面に任意の接地電極を含めることができる。
【0025】
アクチュエータ駆動信号を受信したことに応答して、電極が圧電管に電界を印加することができる。この電界により、圧電管を機械的に変形させ、或いは形状を変化させることができる。この機械的変形を使用して光ファイバを作動させることができる。4つの象限電極、又は2つの直交電極だけでも、片持ち式光ファイバを2次元走査で動かすことができる。一例として、片持ち式光ファイバを渦巻き走査で動かすために、同じ周波数で振幅が増大する異相正弦波駆動信号を4つの電極の各々に印加することができる。
【0026】
この場合、このような圧電アクチュエータで片持ち式光ファイバを作動させ、正確に意図したように動くようにすることは時として困難な傾向にある。1つの理由として、圧電アクチュエータ及び/又は片持ち式光ファイバが、所定のアクチュエータ駆動信号の組に正確に意図したように反応することができないからである。また、アクチュエータ駆動信号に対する圧電アクチュエータ及び/又は片持ち式光ファイバの反応は、変化する環境条件又はその他の条件により、時間とともに変化する可能性がある。この結果、圧電アクチュエータ及び/又は片持ち式光ファイバの実際の動き及び/又は位置が、予想又は意図したものから逸脱する可能性がある。
【0027】
圧電材料はまた、機械的変形、形状の変化、又はその他の機械的応力に応じて電圧又はその他の電気信号を生成する能力も有する。本発明の実施形態では、光ファイバの作動に関連する動きの結果としての機械的変形に起因して圧電アクチュエータにより生成される電圧又はその他の電気信号をリアルタイムで検出することができる。1つの態様では、このような電気信号を使用して圧電アクチュエータ及び/又は片持ち式光ファイバの位置及び/又は動きを推定することができる。別の態様では、この推定された位置及び/又は動きを一種のフィードバックとして使用して、片持ち式光ファイバがより意図した通りに動くようにその作動を改善することができる。
【0028】
図3は、本発明の実施形態による、片持ち式光ファイバを圧電アクチュエータで作動させ、圧電アクチュエータにより生成される電圧又はその他の電気信号を検出する方法320のブロックフロー図である。
【0029】
最初にブロック321において、圧電アクチュエータを機械的に変形させることにより、片持ち式光ファイバを作動させることができる。前述したように、このステップは、本明細書ではアクチュエータ駆動信号と呼ぶ電気信号を圧電アクチュエータに印加するステップを含むことができる。印加されたアクチュエータ駆動信号に応じて圧電アクチュエータを機械的に変形させることができる。この圧電アクチュエータの機械的変形により、片持ち式光ファイバを作動させることができる。本発明の1又はそれ以上の実施形態では、片持ち式光ファイバを作動させるステップは、例えば共振周波数又はその近く、例えばQ係数内などで片持ち式光ファイバを振動させるステップを含むことができる。
【0030】
次に、ブロック322において、圧電アクチュエータの機械的変形の結果として生成される電圧又はその他の電気信号を検出することができる。片持ち式光ファイバの現在の又は以前の作動の結果として、圧電アクチュエータは、片持ち式光ファイバが渦巻き走査パターンを辿ったときの圧電管の偏向などの機械的変形を受けることができる。この機械的変形により、圧電アクチュエータが電圧又はその他の電気信号を生成するようになる。これらの電気信号をベースステーションに逆搬送するとともに、例えば電圧検出器を使用して検出することができる。
【0031】
図4は、本発明の実施形態によるベースステーション401のブロック図である。ベースステーション及びその構成要素は、図1の対応して名前を付けた構成要素の特性のいくつか又は全てを任意に有することができる。説明をあいまいにしないように、以下の説明は、主に異なる又は追加の特性に焦点を置いて行う。
【0032】
ベースステーションは、走査ファイバ装置を接続できるようにするコネクタインターフェイス406を含む。ベースステーションの光源403が、コネクタインターフェイスと光学的に結合される。光源は、コネクタインターフェイスを介して走査ファイバ装置に光を供給することができる。ベースステーションはまた、アクチュエータドライバ404も含む。アクチュエータドライバは、コネクタインターフェイスを介して走査ファイバ装置の圧電アクチュエータにアクチュエータ駆動信号を供給することができる。
【0033】
ベースステーションはまた、少なくとも1つの電圧検出器425も含む。電圧検出器は、電圧、例えば走査ファイバ装置の圧電アクチュエータの機械的変形により生成される電圧を検出することができ、コネクタインターフェイスを介してこの電圧をベースステーションに戻すことができる。一例として、図2に示すような圧電管の場合、数ボルトから(約30ボルトなどの)数十ボルトの範囲にわたる電圧を検出するように電圧検出器を構成することができる。しかしながら、その他のサイズ及び種類の圧電アクチュエータにはその他の範囲を適用することができる。
【0034】
例示の実施形態では、アクチュエータドライバから圧電アクチュエータへの少なくとも1つのアクチュエータ駆動信号経路407に電圧検出器が任意に電気的に結合される。或いは、電圧検出器から圧電アクチュエータへの少なくとも1つの専用の電圧検出経路を任意に含めることができる。圧電管の駆動に使用する同じ電極を使用してもよいし、或いは圧電アクチュエータ上に追加の専用の電圧検出電極を含めてもよい。
【0035】
本発明の1又はそれ以上の実施形態では、圧電アクチュエータへの複数の経路に電圧検出器を少なくとも切り替え可能に電気的に結合することができる。本発明の1又はそれ以上の実施形態では、圧電アクチュエータの4つの全側面(頂面、底面、右面、及び左面)、又は2つの直交する側面(例えば、垂直な側面及び水平な側面)などの、複数の異なる側面に通じる経路に電圧検出器を少なくとも切り替え可能に電気的に結合することができる。少なくとも2つの直交する側面に関連する電圧を検出することにより、2次元の位置及び/又は動きに関する情報を提供するという潜在的な利点をもたらすことができる。本発明の1又はそれ以上の実施形態では、電圧を検出すべき個々の電極のための専用の電圧検出器をベースステーションに含めることができる。或いは、スイッチを使用して共通の電圧検出器に電極を交互に切り替え可能に結合することができる。
【0036】
本明細書では、「結合された」及び「接続された」という用語をこれらの派生語とともに使用している。これらの用語は、互いに同義語として意図されるものではない。より正確に言えば、「接続された」は、2又はそれ以上の要素が互いに直接的に物理的又は電気的な接触状態にあることを示すために使用することができる。「結合された」は、2又はそれ以上の要素が直接的に物理的又は電気的な接触状態にあることを意味することができる。しかしながら、「結合された」は、2又はそれ以上の要素が互いに直接的な接触状態にはないが、なおも互いに物理的、電気的、又は光学的に協動又は相互作用することを意味することもできる。
【0037】
本発明の1又はそれ以上の実施形態では、電圧検出器が圧電アクチュエータにより生成された電圧を検出する間に、アクチュエータドライバを圧電アクチュエータから電気的に減結合することができる。アクチュエータドライバを圧電アクチュエータから減結合することにより、機械的変形に起因して圧電アクチュエータにより生成された電圧又はその他の電気信号の修正を防ぎ、又は少なくとも低減させる役に立つことができる。アクチュエータドライバを圧電アクチュエータから減結合することにより、圧電アクチュエータにより生成されたこのような電圧又はその他の電気信号がアクチュエータドライバへ逆漏れ又は逆散逸するのを低減させる役に立つこともできる。
【0038】
図5は、本発明の実施形態による、アクチュエータドライバ504をコネクタインターフェイス506から電気的に減結合するための第1の構成例のブロック図である。この第1の方法では、アクチュエータドライバとコネクタインターフェイスとの間、かつ電圧検出器525とコネクタインターフェイスとの間にスイッチ527が電気的に結合される。適当なスイッチの例として、以下に限定されるわけではないが、個別部品スイッチ、集積回路スイッチ、及びこれらの組み合わせが含まれる。図示のように、アクチュエータドライバの出力がスイッチと電気的に結合される。電圧検出器の入力がスイッチと電気的に結合される。スイッチはコネクタインターフェイスと電気的に結合される。スイッチは、アクチュエータドライバをコネクタインターフェイスと切り替え可能に電気的に結合したり、或いは結合しなかったりするように動作可能である。スイッチはまた、電圧検出器をコネクタインターフェイスと切り替え可能に電気的に結合したり、或いは結合しなかったりするようにも動作可能である。一例として、コントローラをスイッチに電気的に結合するとともに、コントローラからの制御信号に応じて切り替わるようにスイッチを制御することができる。アクチュエータドライバ又は電圧検出器の両方ではなくいずれかを、コネクタインターフェイスと電気的に結合することができる。このようにして、電圧検出器は、アクチュエータドライバがコネクタインターフェイスから減結合され、従って圧電アクチュエータからも減結合されている間に、圧電アクチュエータにより生成されコネクタインターフェイスを介して戻される電圧を検出することができる。
【0039】
他の設定もまた可能である。図6は、本発明の実施形態による、アクチュエータドライバ604をコネクタインターフェイス606から電気的に減結合するための第2の構成例のブロック図である。この第2の方法は、電圧検出器625が、コネクタインターフェイスと固定して(切り替え可能にではなく)電気的に結合される点を除き、前述した第1の方法と同様である。アクチュエータドライバのみが、スイッチ627を介してコネクタインターフェイスと切り替え可能に電気的に結合される。電圧検出器は、アクチュエータドライバがコネクタインターフェイスから電気的に減結合された場合だけでなく、アクチュエータドライバがコネクタインターフェイスと電気的に結合された場合にも電圧を検出することができる。アクチュエータドライバがコネクタインターフェイスから電気的に減結合された場合に検出される電圧を使用できるのに対し、アクチュエータドライバがコネクタインターフェイスと電気的に結合された場合に検出される電圧は、潜在的に破棄又は無視することができる。
【0040】
本発明の1又はそれ以上の実施形態では、図5の電圧検出器525とスイッチ527との間の線526が高インピーダンスを有することができる。同様に、本発明の1又はそれ以上の実施形態では、図6の電圧検出器625とコネクタインターフェイス606との間の線626も高インピーダンスを有することができる。この高インピーダンスが電流の流れに抵抗を与えることにより、圧電アクチュエータにより生成される電圧を過度に急速に枯渇させることなく検出できるようにする役に立つことができる。一例として、高インピーダンス線は、少なくとも1メガオームのインピーダンスを有することができる。1つの態様では、高インピーダンスを与えるために高インピーダンス増幅器を含めることができる。
【0041】
1又はそれ以上の実施形態では、検出された電圧又はその他の電気信号を使用して、圧電アクチュエータ及び/又は片持ち式光ファイバの位置及び/又は動きを推定することができる。一般に、電圧又はその他の電気信号の大きさは、圧電アクチュエータの機械的変形の量に直接関連する。この結果、電圧又はその他の電気信号が圧電アクチュエータの位置及び/又は動きに関する情報を含み、これを使用して圧電アクチュエータ及び/又は片持ち式光ファイバの位置及び/又は動きを推定することができる。本発明の1又はそれ以上の実施形態では、この後、検出された電圧に少なくとも部分的に基づいて圧電アクチュエータを作動させることができる。すなわち、検出された電圧が、さらなる作動を導く一種のフィードバックとしての役割を果たすことができる。以下でさらに説明するが、能動的駆動中、又は走査の終了時における制動中に、この情報又はフィードバックを使用することができる。
【0042】
図7は、本発明の実施形態による、1フレームの画像構築中に実施できる方法730のブロックフロー図である。
【0043】
最初にブロック731において、能動的駆動を行うことができる。この能動的駆動は、実質的に前述したように行うことができる。特に能動的駆動中には、圧電アクチュエータが走査に従って片持ち式光ファイバを作動させるようにするために、圧電アクチュエータにアクチュエータ駆動信号を印加することができる。
【0044】
次に、走査後、ブロック732において能動的制動を行うことができる。能動的制動は、圧電アクチュエータが片持ち式光ファイバの動きを実質的に低減させる方法で片持ち式光ファイバを作動させるようにするアクチュエータ駆動信号を圧電アクチュエータに印加するステップを含むことができる。本明細書で使用する場合、片持ち式光ファイバの動きを実質的に低減させるステップは、片持ち式光ファイバの動きを少なくとも50%低減させることを意味する。一例として、渦巻き走査の場合、能動的駆動中に使用されるアクチュエータ駆動信号と同様のものではあるが、相対的に約180°位相ずれし、潜在的に大きな又は小さな振幅のいずれかを有する信号を能動的制動に使用することができる。作動を使用して、片持ち式光ファイバの動きを増大させるか、或いは低減させるかのいずれかを行うことができることに留意されたい。
【0045】
次にブロック733において、能動的制動の後に受動的制動(沈静)を行うことができる。受動的制動は、片持ち式光ファイバが沈静し、或いは実質的に動きを停止できるようになるまでの期間、ただ待機するだけのステップを含むことができる。このステップにより、片持ち式光ファイバを次のフレームの画像構築に向けて準備することができる。1つの態様では、この方法は、各フレームにつき一度、所定のフレームレートでブロック731〜733を通じて任意に反復することができる。
【0046】
一般に、能動的制動は、受動的制動よりも片持ち式光ファイバの動きを急速に低減させることができる。例示的ではあるが非限定的な例として、約8サイクルの能動的制動により、片持ち式光ファイバの動きの約80%を除去できるのに対し、残りの20%の動きを除去するのに約50サイクル以上の受動的制動を要する場合がある。これらの数値は、実施構成ごとに様々であってもよい。
【0047】
フレームレートの増加を促進するには、多くの場合能動的制動が望ましい。しかしながら、能動的制動の終了に向けて圧電アクチュエータ及び/又は片持ち式光ファイバの位置及び/又は動きを正確に把握するのは困難な傾向にある。さらに、位置及び/又は動きが予想したものと異なる場合、能動的制動は、片持ち式光ファイバの動きを減少させるよりもむしろ、片持ち式光ファイバの動きを意図せずに増大させる可能性がある。この結果、能動的制動が時期尚早に、すなわち望ましいものとなるよりも早く停止される可能性がある。
【0048】
本発明の1又はそれ以上の実施形態では、圧電アクチュエータにより生成される電圧又はその他の電気信号を検出し、これを能動的制動中に使用することができる。図8は、本発明の実施形態による能動的制動の方法840のブロックフロー図である。
【0049】
最初にブロック841において、従来の能動的制動を任意に所定の反復回数行うことができる。この所定の回数は、片持ち式光ファイバの動きがさらなる能動的制動で予測不能になり始める反復回数未満であってもよい。一例として、この所定の数は、片持ち式光ファイバの動きの約30%から80%を低減させるようなものであってもよい。別の例として、所定の反復回数は1回の反復であってもよい。
【0050】
次にブロック842において、動きに関連する機械的変形又は応力の結果として圧電アクチュエータにより生成される1又はそれ以上の電圧を検出することができる。これらの電圧は、前述したように検出することができる。
【0051】
次にブロック843において、1又はそれ以上の検出された電圧に少なくとも部分的に基づいて片持ち式光ファイバを作動させることにより、能動的制動を行うことができる。すなわち、検出された電圧を一種のフィードバックとして使用して、次の作動を行う方法を調節することができる。本発明の1又はそれ以上の実施形態では、この調節は、検出された電圧に少なくとも部分的に基づいてアクチュエータ駆動信号を決定するステップと、決定されたアクチュエータ駆動信号を圧電アクチュエータに印加して能動的制動を行うステップとを含むことができる。
【0052】
この調節は、いくつかの潜在的な利点をもたらすことができる。一例を挙げると、この調節は、片持ち式光ファイバの能動的制動の改善に役立つことができる。別の例を挙げると、この調節は、能動的制動が、片持ち式光ファイバの動きを(低減させるのではなく)増大させるという影響を意図せずに及ぼすような状況を避けるのに役立つことができる。さらに別の例を挙げると、この調節は、電圧が検出されなかった場合に能動的制動を一般的に可能な時間よりも長い時間行えるようにする役に立つことができる。
【0053】
次に、ブロック844において、動きに関係する機械的変形又は応力の結果として圧電アクチュエータにより生成される1又はそれ以上の電圧を再び検出することができる。これらの電圧は、前述したように検出することができる。
【0054】
次にブロック845において、能動的制動を停止すべきか否かの決定を行うことができる。本発明の1又はそれ以上の実施形態では、ブロック844からの1又はそれ以上の検出された電圧に基づいてこの決定を行うことができる。例えば、ブロック844において検出された電圧がブロック842において検出された対応する電圧よりも高いか又はこれに等しい場合、或いは検出された電圧が、ブロック843における能動的制動により動きの増大が生じたことを別様に示していると思われる場合、能動的制動を停止すると決定することができる。その他の場合には、能動的制動を継続すると決定することができる。
【0055】
ブロック845において決定を行う他の方法もまた可能である。例えば、本発明の1又はそれ以上の実施形態では、ブロック843における能動的制動が行われた回数の総数が所定の数に等しいか、或いはこれよりも大きいかの判定を行うことができる。総数が所定の数に等しいか、或いはこれよりも大きい場合、能動的制動を停止すると決定することができる。その他の場合には、能動的制動を継続すると決定することができる。これらはほんのいくつかの具体例に過ぎない。
【0056】
ブロック845における決定が「いいえ」である(すなわち、能動的制動を停止すると決定された)場合、方法はブロック843を再訪することができる。その他の場合には、方法はブロック846において終了することができる。
【0057】
ある概念を例示するために特定の方法を示し説明したが、本発明の範囲はこの特定の方法に限定されるものではない。一例として、従来の能動的制動を所定の反復回数行った後ではなく、能動的制動全体を通じて電圧を検出することができる。別の例として、この方法を所定の回数単純に繰り返すことを容認して、ブロック845における決定を任意に省略することができる。さらに別の例として、検出された電圧に基づく能動的制動ではなく、従来の能動的制動のみを行うこともできる。代わりに、検出された電圧を使用して、例えば動きの増大が検出された場合、従来の能動的制動をいつ停止するのかを決定することができる。上述した方法の様々な他の修正もまた企図される。
【0058】
本発明の1又はそれ以上の実施形態によれば、今度は上記と同様に、或いは上記とは別に能動的駆動中に電圧を検出し使用することができる。一例として、例えば渦巻き走査の終了時などの走査の終了時に1又はそれ以上の電圧を検出することができる。この1又はそれ以上の検出された電圧を使用して、渦巻き走査の最大直径を推定し、或いは別様に走査の範囲又は合焦レベルを推定することができる。次に、適切な場合、位置及び/又は動きを予想又は意図したものに近づけるのに役立てるために、1又はそれ以上の検出された電圧に少なくとも部分的に基づいて、次の走査中に使用するアクチュエータ駆動信号を決定することができる。例えば、アクチュエータ駆動電圧を増大させて渦巻き直径を増加させたり、或いはアクチュエータ駆動電圧を低減させて渦巻き直径を減少させたりすることができる。別の例として、(円形渦巻きが望ましい時に)楕円形渦巻きが検出された場合、幅狭の方の軸にかかる電圧に対して幅広の方の軸にかかる電圧を低減させて楕円をより円形にすることができる。検出された電圧に関するその他の用途もまた企図される。例えば、検出された電圧を使用して、画像の再マッピングを行い、或いは走査ファイバシステムを使用して構築された画像を別様に調節することができる。当業者にはさらなる他の用途が明らかとなり、本開示の利益を有することになるであろう。
【0059】
図9は、本発明の実施形態による、製造の物品950のブロックフロー図である。この製造の物品は機械可読媒体952を含む。適当な種類の機械可読媒体の例として、以下に限定されるわけではないが、フロッピーディスケット、光記憶媒体、光ディスク、CD−ROM、磁気ディスク、光磁気ディスク、読み取り専用メモリ(ROM)、プログラム可能ROM(PROM)、消去及びプログラム可能ROM(EPROM)、電気消去及びプログラム可能ROM(EEPROM)、ランダムアクセスメモリ(RAM)、スタティックRAM(SRAM)、ダイナミックRAM(DRAM)、フラッシュメモリ、その他の機械可読媒体、及びこれらの組み合わせが挙げられる。
【0060】
機械可読媒体は、機械による読み取りが可能である。ほんの数例を挙げると、以下に限定されるわけではないが、適当な機械の例として、ベースステーション、内視鏡ベースステーション、走査ファイバシステム、走査ファイバ画像取得システム、走査ファイバ画像表示システム、医療機器、コンピュータシステム、及び1又はそれ以上のプロセッサ又は処理回路を有する様々なその他の装置が挙げられる。
【0061】
機械により実行された場合に、本明細書に開示する1又はそれ以上の動作又は方法を機械に実行させる命令954が、機械可読媒体内及び/又は機械可読媒体上に記憶又は別様に提供される。例えば、この命令は、機械により実行された場合、1又はそれ以上の検出された電圧又はその他の電気信号に基づいて、片持ち式光ファイバ及び/又は圧電アクチュエータの位置及び/又は動きを機械に推定させることができる。別の例として、この命令は、機械により実行された場合、1又はそれ以上の検出された電圧又はその他の電気信号に少なくとも部分的に基づいて作動及び/又はアクチュエータ駆動信号を機械に決定させることができる。
【0062】
この機械は、検出された電圧に少なくとも部分的に基づいて、圧電アクチュエータ及び圧電アクチュエータに結合された片持ち式光ファイバの一方又は両方の位置を推定する位置推定ユニットを含むことができる。この機械は、検出された電圧に少なくとも部分的に基づいてアクチュエータ駆動信号を決定するアクチュエータ駆動信号決定ユニットを含むこともできる。これらのユニットの各々は、ソフトウェア、ハードウェア、又はこれらの組み合わせを使用して実装することができる手段である。
【0063】
上記の説明では、本発明の実施形態を完全に理解できるようにするために、説明目的で数多くの特定の詳細について記載した。説明した特定の実施形態は、本発明を限定するものではなく、例示する目的で提供したものである。これらの特定の詳細のいくつかを伴わずに実施形態を実施することができる。さらに、本明細書で開示する実施形態、例えばこれらの実施形態の構成要素の構成、機能、及び動作方法などに修正を加えることができる。図面に示し及び本明細書で説明したものとの全ての同等関係が本発明の実施形態に含まれる。本発明の範囲は、上記に示した特定の例ではなく、下記の特許請求の範囲により決定すべきである。
【0064】
様々な動作及び方法について説明した。これらの方法について基本的な形で説明したが、これらの方法に任意に動作を追加することができる。場合によっては、これらの方法から動作を削除することができる。場合によっては、これらの方法の動作を異なる順序で行うことができる。これらの方法に多くの修正及び適合を行うことができ、これらは可能であるとともに企図される。
【0065】
なお、本明細書を通じて、「1つの実施形態」、「実施形態」、又は「1又はそれ以上の実施形態」への言及は、例えば、本発明の実施に特定の特徴を含めることができることを意味するものであると理解されたい。同様に、本開示を簡略化し、様々な発明の態様の理解に役立てる目的で、説明には、様々な特徴を単一の実施形態、図又はその説明にまとめた部分があることを理解されたい。しかしながら、本開示方法について、本発明が、個々の請求項に明記したよりも多くの特徴を必要とするという意図を反映したものであると解釈すべきではない。むしろ、以下の特許請求の範囲が示すように、本発明の態様は、単一の開示した実施形態の全ての特徴よりも少ないものにより成立することができる。従って、詳細な説明に続く特許請求の範囲は、本明細書によりこの詳細な説明に明確に組み入れられ、個々の請求項は、それ自体が本発明の独立した実施形態として成立するものである。
【符号の説明】
【0066】
100 走査ファイバシステム
101 ベースステーション
103 光源
104 アクチュエータドライバ
105 コネクタ
106 コネクタインターフェース
107 走査ファイバ装置
107 (単複の)アクチュエータ駆動信号経路
108 光路
109 (単複の)後方散乱光路
110 光検出器(任意)
111 画像処理システム(任意)
112 ケーブル
113 単一の光ファイバの片持ち状の自由端部
114 圧電アクチュエータ
120 (単複の)レンズ
122 片持ち式光ファイバの先端
123 面
【特許請求の範囲】
【請求項1】
圧電アクチュエータを機械的に変形させることにより片持ち式光ファイバを作動させるステップと、
前記圧電アクチュエータの機械的変形の結果として生成される電気信号を検出するステップと、
を含むことを特徴とする方法。
【請求項2】
前記検出された電気信号に基づいて前記圧電アクチュエータ及び前記片持ち式光ファイバの少なくとも一方の位置を推定するステップをさらに含む、
ことを特徴とする請求項1に記載の方法。
【請求項3】
前記検出された電気信号に少なくとも部分的に基づいて前記片持ち式光ファイバを作動させるステップをさらに含む、
ことを特徴とする請求項1に記載の方法。
【請求項4】
前記検出された電気信号に少なくとも部分的に基づいて前記片持ち式光ファイバを作動させるステップが、
前記検出された電気信号に少なくとも部分的に基づいてアクチュエータ駆動信号を決定するステップと、
前記決定されたアクチュエータ駆動信号を前記圧電アクチュエータに印加するステップと、
を含むことを特徴とする請求項3に記載の方法。
【請求項5】
前記片持ち式光ファイバを作動させるステップが、前記圧電アクチュエータにアクチュエータ駆動信号を印加するステップを含み、前記電気信号が検出される間に前記アクチュエータ駆動信号を前記圧電アクチュエータから減結合するステップをさらに含む、
ことを特徴とする請求項1に記載の方法。
【請求項6】
前記電気信号を検出するステップが、該電気信号を能動的制動中に検出するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項7】
前記検出された電気信号に少なくとも部分的に基づいて前記片持ち式光ファイバを作動させることにより追加の能動的制動を行うステップをさらに含む、
ことを特徴とする請求項6に記載の方法。
【請求項8】
前記検出された電気信号に少なくとも部分的に基づいて能動的制動を停止することを決定するステップをさらに含む、
ことを特徴とする請求項6に記載の方法。
【請求項9】
前記電気信号を検出するステップが、能動的駆動の期間中及び能動的駆動の期間の終了時の一方において前記電気信号を検出するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項10】
前記検出された電気信号に少なくとも部分的に基づいてアクチュエータ駆動信号を決定するステップと、
前記決定されたアクチュエータ駆動信号を前記圧電アクチュエータに印加するステップと、
をさらに含むことを特徴とする請求項9に記載の方法。
【請求項11】
前記片持ち式光ファイバを前記圧電アクチュエータで作動させるステップが、前記片持ち式光ファイバを挿入する圧電管で前記片持ち式光ファイバを作動させるステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項12】
前記電気信号を検出するステップが、前記圧電管の第1の側の前記電気信号を検出するステップを含み、前記第1の側に直交する前記圧電管の第2の側の電気信号を検出するステップをさらに含む、
ことを特徴とする請求項11に記載の方法。
【請求項13】
前記片持ち式光ファイバを患者に挿入するステップをさらに含む、
ことを特徴とする請求項1に記載の方法。
【請求項14】
前記片持ち式光ファイバを作動させるステップが、該片持ち式光ファイバを共振周波数のQ係数内で振動させるステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項15】
走査ファイバ装置を接続できるようにするためのコネクタインターフェイスと、
前記コネクタインターフェイスを介して前記走査ファイバ装置に光を供給するために、前記コネクタインターフェイスと光学的に結合された光源と、
前記コネクタインターフェイスを介して前記走査ファイバ装置の圧電アクチュエータにアクチュエータ駆動信号を供給するためのアクチュエータドライバと、
前記圧電アクチュエータの機械的変形に起因して生成され、前記コネクタインターフェイスを介して戻される電圧を検出するための電圧検出器と、
を備えることを特徴とする装置。
【請求項16】
前記アクチュエータドライバが、前記コネクタインターフェイスと切り替え可能に電気的に結合される、
ことを特徴とする請求項15に記載の装置。
【請求項17】
前記電圧検出器が、前記コネクタインターフェイスと切り替え可能に電気的に結合される、
ことを特徴とする請求項16に記載の装置。
【請求項18】
前記アクチュエータドライバ及びコネクタインターフェイスと電気的に結合され、前記アクチュエータドライバを前記コネクタインターフェイスと切り替え可能に電気的に結合し、或いは結合しないように動作可能なスイッチをさらに備える、
ことを特徴とする請求項16に記載の装置。
【請求項19】
前記電圧検出器が前記スイッチと電気的に結合され、該スイッチが、前記電圧検出器を前記コネクタインターフェイスと切り替え可能に電気的に結合し、或いは結合しないように動作可能である、
ことを特徴とする請求項18に記載の装置。
【請求項20】
前記電圧検出器と前記コネクタインターフェイスとの間に、少なくとも1メガオームのインピーダンスを有する高インピーダンス線をさらに備える、
ことを特徴とする請求項15に記載の装置。
【請求項21】
前記高インピーダンス線が高インピーダンス増幅器を備える、
ことを特徴とする請求項20に記載の装置。
【請求項22】
前記電圧検出器が複数の導電路と電気的に結合され、該複数の導電路が、前記圧電アクチュエータの直交する側の対応する複数の電極と少なくとも切り替え可能に電気的に結合される、
ことを特徴とする請求項15に記載の装置。
【請求項23】
前記圧電アクチュエータ及び該圧電アクチュエータに結合された片持ち式光ファイバの一方又は両方の位置を、前記検出された電圧に少なくとも部分的に基づいて推定する位置推定ユニットをさらに備える、
ことを特徴とする請求項15に記載の装置。
【請求項24】
前記検出された電圧に少なくとも部分的に基づいてアクチュエータ駆動信号を決定するアクチュエータ駆動信号決定ユニットをさらに備える、
ことを特徴とする請求項15に記載の装置。
【請求項1】
圧電アクチュエータを機械的に変形させることにより片持ち式光ファイバを作動させるステップと、
前記圧電アクチュエータの機械的変形の結果として生成される電気信号を検出するステップと、
を含むことを特徴とする方法。
【請求項2】
前記検出された電気信号に基づいて前記圧電アクチュエータ及び前記片持ち式光ファイバの少なくとも一方の位置を推定するステップをさらに含む、
ことを特徴とする請求項1に記載の方法。
【請求項3】
前記検出された電気信号に少なくとも部分的に基づいて前記片持ち式光ファイバを作動させるステップをさらに含む、
ことを特徴とする請求項1に記載の方法。
【請求項4】
前記検出された電気信号に少なくとも部分的に基づいて前記片持ち式光ファイバを作動させるステップが、
前記検出された電気信号に少なくとも部分的に基づいてアクチュエータ駆動信号を決定するステップと、
前記決定されたアクチュエータ駆動信号を前記圧電アクチュエータに印加するステップと、
を含むことを特徴とする請求項3に記載の方法。
【請求項5】
前記片持ち式光ファイバを作動させるステップが、前記圧電アクチュエータにアクチュエータ駆動信号を印加するステップを含み、前記電気信号が検出される間に前記アクチュエータ駆動信号を前記圧電アクチュエータから減結合するステップをさらに含む、
ことを特徴とする請求項1に記載の方法。
【請求項6】
前記電気信号を検出するステップが、該電気信号を能動的制動中に検出するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項7】
前記検出された電気信号に少なくとも部分的に基づいて前記片持ち式光ファイバを作動させることにより追加の能動的制動を行うステップをさらに含む、
ことを特徴とする請求項6に記載の方法。
【請求項8】
前記検出された電気信号に少なくとも部分的に基づいて能動的制動を停止することを決定するステップをさらに含む、
ことを特徴とする請求項6に記載の方法。
【請求項9】
前記電気信号を検出するステップが、能動的駆動の期間中及び能動的駆動の期間の終了時の一方において前記電気信号を検出するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項10】
前記検出された電気信号に少なくとも部分的に基づいてアクチュエータ駆動信号を決定するステップと、
前記決定されたアクチュエータ駆動信号を前記圧電アクチュエータに印加するステップと、
をさらに含むことを特徴とする請求項9に記載の方法。
【請求項11】
前記片持ち式光ファイバを前記圧電アクチュエータで作動させるステップが、前記片持ち式光ファイバを挿入する圧電管で前記片持ち式光ファイバを作動させるステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項12】
前記電気信号を検出するステップが、前記圧電管の第1の側の前記電気信号を検出するステップを含み、前記第1の側に直交する前記圧電管の第2の側の電気信号を検出するステップをさらに含む、
ことを特徴とする請求項11に記載の方法。
【請求項13】
前記片持ち式光ファイバを患者に挿入するステップをさらに含む、
ことを特徴とする請求項1に記載の方法。
【請求項14】
前記片持ち式光ファイバを作動させるステップが、該片持ち式光ファイバを共振周波数のQ係数内で振動させるステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項15】
走査ファイバ装置を接続できるようにするためのコネクタインターフェイスと、
前記コネクタインターフェイスを介して前記走査ファイバ装置に光を供給するために、前記コネクタインターフェイスと光学的に結合された光源と、
前記コネクタインターフェイスを介して前記走査ファイバ装置の圧電アクチュエータにアクチュエータ駆動信号を供給するためのアクチュエータドライバと、
前記圧電アクチュエータの機械的変形に起因して生成され、前記コネクタインターフェイスを介して戻される電圧を検出するための電圧検出器と、
を備えることを特徴とする装置。
【請求項16】
前記アクチュエータドライバが、前記コネクタインターフェイスと切り替え可能に電気的に結合される、
ことを特徴とする請求項15に記載の装置。
【請求項17】
前記電圧検出器が、前記コネクタインターフェイスと切り替え可能に電気的に結合される、
ことを特徴とする請求項16に記載の装置。
【請求項18】
前記アクチュエータドライバ及びコネクタインターフェイスと電気的に結合され、前記アクチュエータドライバを前記コネクタインターフェイスと切り替え可能に電気的に結合し、或いは結合しないように動作可能なスイッチをさらに備える、
ことを特徴とする請求項16に記載の装置。
【請求項19】
前記電圧検出器が前記スイッチと電気的に結合され、該スイッチが、前記電圧検出器を前記コネクタインターフェイスと切り替え可能に電気的に結合し、或いは結合しないように動作可能である、
ことを特徴とする請求項18に記載の装置。
【請求項20】
前記電圧検出器と前記コネクタインターフェイスとの間に、少なくとも1メガオームのインピーダンスを有する高インピーダンス線をさらに備える、
ことを特徴とする請求項15に記載の装置。
【請求項21】
前記高インピーダンス線が高インピーダンス増幅器を備える、
ことを特徴とする請求項20に記載の装置。
【請求項22】
前記電圧検出器が複数の導電路と電気的に結合され、該複数の導電路が、前記圧電アクチュエータの直交する側の対応する複数の電極と少なくとも切り替え可能に電気的に結合される、
ことを特徴とする請求項15に記載の装置。
【請求項23】
前記圧電アクチュエータ及び該圧電アクチュエータに結合された片持ち式光ファイバの一方又は両方の位置を、前記検出された電圧に少なくとも部分的に基づいて推定する位置推定ユニットをさらに備える、
ことを特徴とする請求項15に記載の装置。
【請求項24】
前記検出された電圧に少なくとも部分的に基づいてアクチュエータ駆動信号を決定するアクチュエータ駆動信号決定ユニットをさらに備える、
ことを特徴とする請求項15に記載の装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公表番号】特表2010−534862(P2010−534862A)
【公表日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願番号】特願2010−518156(P2010−518156)
【出願日】平成19年8月6日(2007.8.6)
【国際出願番号】PCT/US2007/017439
【国際公開番号】WO2009/014525
【国際公開日】平成21年1月29日(2009.1.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
【出願人】(502457803)ユニヴァーシティ オブ ワシントン (93)
【Fターム(参考)】
【公表日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願日】平成19年8月6日(2007.8.6)
【国際出願番号】PCT/US2007/017439
【国際公開番号】WO2009/014525
【国際公開日】平成21年1月29日(2009.1.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
【出願人】(502457803)ユニヴァーシティ オブ ワシントン (93)
【Fターム(参考)】
[ Back to top ]