
圧電アクチュエーターの駆動方法
【課題】被駆動体の駆動の最適化を図る。
【解決手段】圧電素子に駆動信号が供給されることに基づいて振動する振動体を備え、振動体の振動を被駆動体に伝えて被駆動体を駆動させる圧電アクチュエーターの駆動方法であって、被駆動体の駆動方向と交差する方向に振動体を伸縮させる第1振動モードと、被駆動体の駆動方向に振動体を屈曲させる第2振動モードであって、第1振動モードとは独立した第2振動モードと、を同時に実行し、被駆動体の駆動を加速又は減速させる場合には、被駆動体を定速で駆動させる場合よりも、第1振動モードの振動の振幅を大きくし、且つ、第2振動モードの振動の振幅を小さくする。
【解決手段】圧電素子に駆動信号が供給されることに基づいて振動する振動体を備え、振動体の振動を被駆動体に伝えて被駆動体を駆動させる圧電アクチュエーターの駆動方法であって、被駆動体の駆動方向と交差する方向に振動体を伸縮させる第1振動モードと、被駆動体の駆動方向に振動体を屈曲させる第2振動モードであって、第1振動モードとは独立した第2振動モードと、を同時に実行し、被駆動体の駆動を加速又は減速させる場合には、被駆動体を定速で駆動させる場合よりも、第1振動モードの振動の振幅を大きくし、且つ、第2振動モードの振動の振幅を小さくする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、圧電アクチュエーターの駆動方法に関する。
【背景技術】
【0002】
被駆動体(例えばローター)を駆動させる圧電アクチュエーターとして、圧電素子(ピエゾ素子)によって振動体を長さ方向に伸縮させる伸縮振動(縦振動ともいう)と、振動体を面方向に屈曲させる屈曲振動とを用いるものが知られている。例えば特許文献1では、伸縮振動と屈曲振動とによって、振動体に設けられた当接部を、略楕円の軌道を描くように運動(楕円運動)させている。そして、楕円運動に応じて当接部を被駆動体に当接させて被駆動体を駆動している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−166816号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来、被駆動体の駆動速度に関わらず、楕円運動の軌道の形状が一定であった。このため、被駆動体を安定して駆動することができない可能性があった。例えば、被駆動体が停止状態から動き始めるときに、屈折振動の振幅が大きいと当接部が被駆動体に当接したとき、滑りが生じるおそれがある。そこで屈折振動の振幅を小さくすると、楕円運動の軌道が小さくなり、伸縮振動の振幅も小さくなってしまう。この場合、結果的に当接部と被駆動体とが滑りやすくなり、滑りを抑制できないおそれがあった。また、例えば屈折振動の振幅を大きくすると、楕円運動の軌道が大きくなり伸縮振動の振幅も大きくなる。この場合、被駆動体が駆動し難くなり、被駆動体を駆動させるのにエネルギーを無駄に消費してしまうおそれがあった。
そこで本発明は、被駆動体の駆動の最適化を図ることを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するための主たる発明は、
圧電素子に駆動信号が供給されることに基づいて振動する振動体を備え、前記振動体の振動を被駆動体に伝えて前記被駆動体を駆動させる圧電アクチュエーターの駆動方法であって、
前記被駆動体の駆動方向と交差する方向に前記振動体を伸縮させる第1振動モードと、
前記被駆動体の駆動方向に前記振動体を屈曲させる第2振動モードであって、前記第1振動モードとは独立した第2振動モードと、
を同時に実行し、
前記被駆動体の駆動を加速又は減速させる場合には、前記被駆動体を定速で駆動させる場合よりも、前記第1振動モードの振動の振幅を大きくし、且つ、前記第2振動モードの振動の振幅を小さくする、
ことを特徴とする圧電アクチュエーターの駆動方法である。
【0006】
本発明の他の特徴については、本明細書及び添付図面の記載により明らかにする。
【図面の簡単な説明】
【0007】
【図1】本実施形態における圧電アクチュエーターを用いた駆動ユニットの概略構成図である。
【図2】本実施形態における圧電アクチュエーター付近の側面図である。
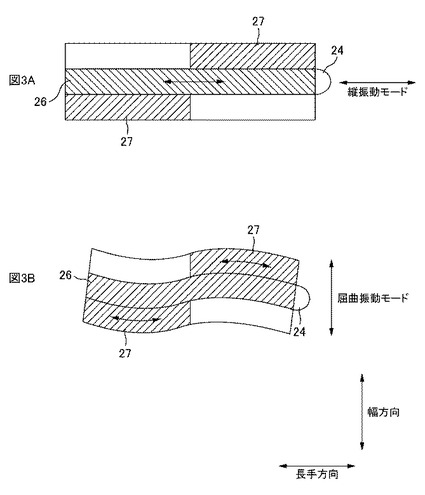
【図3】図3Aは縦振動モードの簡略説明図であり、図3Bは屈曲振動モードの簡略説明図である。
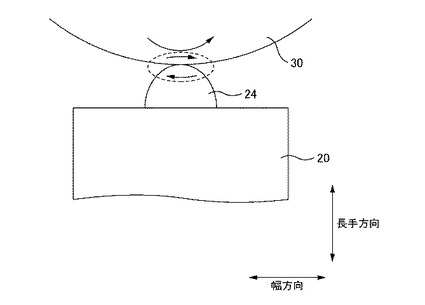
【図4】ローターを回転させる際の当接部の運動の説明図である。
【図5】楕円の軌跡の説明図である。
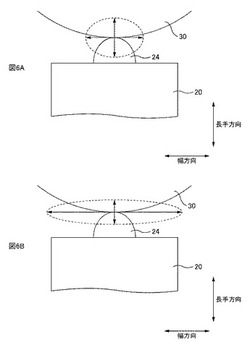
【図6】本実施形態の駆動方法の説明図である。図6Aは加減速域における楕円軌道を示し、図6Bは定速域における楕円軌道を示している。
【発明を実施するための形態】
【0008】
本明細書及び添付図面の記載により、少なくとも、以下の事項が明らかとなる。
【0009】
圧電素子に駆動信号が供給されることに基づいて振動する振動体を備え、前記振動体の振動を被駆動体に伝えて前記被駆動体を駆動させる圧電アクチュエーターの駆動方法であって、
前記被駆動体の駆動方向と交差する方向に前記振動体を伸縮させる第1振動モードと、
前記被駆動体の駆動方向に前記振動体を屈曲させる第2振動モードであって、前記第1振動モードとは独立した第2振動モードと、
を同時に実行し、
前記被駆動体の駆動を加速又は減速させる場合には、前記被駆動体を定速で駆動させる場合よりも、前記第1振動モードの振動の振幅を大きくし、且つ、前記第2振動モードの振動の振幅を小さくする、
ことを特徴とする圧電アクチュエーターの駆動方法が明らかとなる。
【0010】
このような駆動方法によれば、被駆動体の駆動を加速又は減速させる際には、被駆動体と振動体(当接部)の滑りを防止でき安定して駆動できる。また、被駆動体を定速で駆動させる際にはエネルギーを無駄に消費しないようにできるとともに、被駆動体の駆動速度を速めることができる。よって、被駆動体の駆動の最適化を図ることができる。
【0011】
かかる圧電アクチュエーターの駆動方法であって、前記被駆動体の駆動速度を検出し、当該駆動速度の検出結果に応じて、前記第1振動モードの振動の振幅、及び、前記第2振動モードの振動の振幅をそれぞれ変更することが望ましい。
このような駆動方法によれば、被駆動体の駆動をより確実に制御できる。
【0012】
かかる圧電アクチュエーターの駆動方法であって、前記第2振動モードの振動の振幅は、前記駆動速度に依存するように変更することが望ましい。
このような駆動方法によれば、被駆動体と振動体(当接部)の滑りを抑制しつつ駆動速度を変えることができる。
【0013】
かかる圧電アクチュエーターの駆動方法であって、前記被駆動体の駆動を加速又は減速させるときの前記第1振動モードの振動の振幅は、所定値以下であることが望ましい。
このような駆動方法によれば、異常振動の発生を抑制することができる。
【0014】
以下、本発明の実施形態を、図面を参照しつつ説明する。
【0015】
===実施形態===
≪駆動ユニットの構成について≫
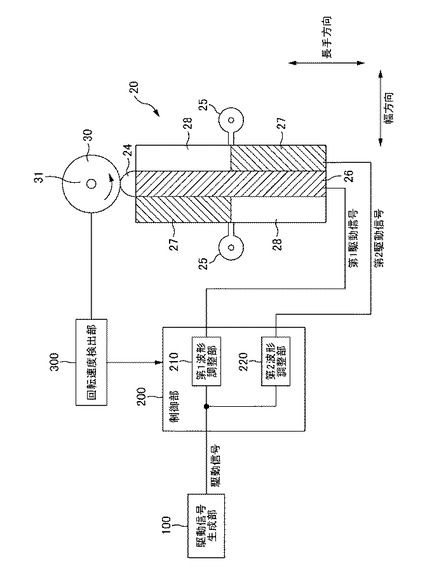
図1は、本実施形態における圧電アクチュエーターを用いた駆動ユニットの概略構成図である。また、図2は、本実施形態における圧電アクチュエーター付近の側面図である。なお、図2では、便宜上、後述する固定部材25の図示を省略している。本実施形態の駆動ユニットは、例えばマイクロポンプや携帯型機器などの機器を駆動するためのユニットである。
【0016】
図1に示す本実施形態の駆動ユニットは、圧電アクチュエーター20、ローター30、駆動信号生成部100、制御部200、及び回転速度検出部300を備えている。
【0017】
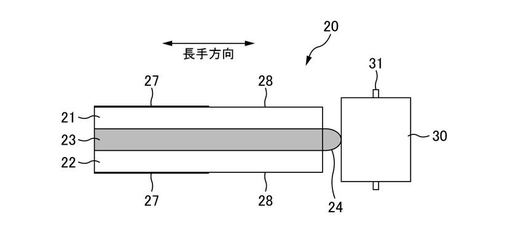
圧電アクチュエーター20は、後述する駆動信号生成部100で生成された駆動信号に基づいて振動し、その振動によってローター30(被駆動体に相当する)を回転させる。図1に示すように、本実施形態の圧電アクチュエーター20は、矩形形状に設けられている。以下の説明において、その長辺方向のことを長手方向とよび、短辺方向のことを幅方向とよぶ。なお、圧電アクチュエーター20の構成については後述する。
【0018】
ローター30は、円筒形状の回転体であり、円の中央には回転軸31が設けられている。圧電アクチュエーター20の当接部24(後述する)が圧電アクチュエーター20の振動に応じてローター30と当接することによって、ローター30は、回転軸31を中心に回転する。なお、本実施形態において、ローター30は、図1における反時計回り方向(図の矢印方向)のみに回転するように制御される。
【0019】
駆動信号生成部100は、所定周期の駆動信号を生成する。本実施形態の駆動信号生成部100は、周期的にハイレベルとローレベルとに切り替わる矩形波の駆動信号を生成する。なお、駆動信号の波形はこれには限定されず、例えば、正弦波、三角波、あるいは台形波などであってもよい。
【0020】
制御部200は、駆動信号100によって生成された駆動信号の波形形状を調整することによって、圧電アクチュエーター20の駆動を制御する。本実施形態の制御部200は、第1波形調整部210と第2波形調整部220を備えている。各調整部は、駆動信号の波形の位相を調整する位相調整回路(例えば遅延回路)、及び、駆動信号の電圧振幅を調整する増幅回路を備えており、駆動信号の波形をそれぞれ独立して調整する。なお、以下の説明において、第1波形調整部210によって調整された駆動信号のことを第1駆動信号とよび、第2波形調整部220によって調整された駆動信号のことを第2駆動信号とよぶ。第1駆動信号及び第2駆動信号は、波形の位相や振幅の大きさがそれぞれ異なる信号であり、ともに圧電アクチュエーター20に供給される。
【0021】
回転速度検出部300は、ローター30の回転速度を検出し、その検出結果を制御部200に出力する。この回転速度検出部300の検出結果に基づいて、制御部200は、圧電アクチュエーター20の駆動を制御する。
【0022】
≪圧電アクチュエーターの構成について≫
圧電アクチュエーター20は、圧電素子21、22、補強板23、当接部24、及び固定部材25を有している。
【0023】
補強板23は、例えばアルミニウムなどの金属によって形成された矩形状の板部材である。補強板23には、後述する当接部24及び固定部材25が設けられている。また、補強板23には不図示の接地線が接続されており、当該補強板23は接地されている。
【0024】
圧電素子21、22は、例えば、チタン酸ジルコン酸鉛によって形成されたものであり、それぞれ補強板23と同様の矩形形状に設けられている。図2に示すように圧電素子21は、補強板23の上面側に配置され、圧電素子22は、補強板23の下面側に配置されている。すなわち、圧電素子21と圧電素子22によって補強板23を挟んだ構成となっている。また、図1に示すように圧電素子21の上面には、幅方向の中央部分において長手方向に沿った第1電極26が形成されている。また、その第1電極26を挟んだ対角線上には、1対の第2電極27が形成されている。これらの各電極は、圧電素子21の表面に例えば、ニッケルめっき層及び金めっき層が形成されて設けられたものである。
【0025】
各第2電極27は、圧電素子21の面中心に対して、回転対称に配置されるとともに、不図示のリード線などによって電気的に接続されている。なお、第1電極26には第1駆動信号(第1波形調整部210を通った駆動信号)が供給され、第2電極27には第2駆動信号(第2波形調整部220を通った駆動信号)が供給される。
【0026】
また、1対の第2電極27とは逆の対角線上には、第3電極28が設けられている。この第3電極28は、振動体の振動の位相を検出するために設けられた位相検出用の電極である。各第3電極28による検出結果は制御部200に出力される。
【0027】
なお、補強板23の下側の圧電素子22にも圧電素子21に形成された各電極と同じ電極が同様の配置となるように設けられている(図2参照)。また、圧電素子22の第1電極26、第2電極27にもそれぞれ圧電素子21の各電極と同じ駆動信号が供給される。
【0028】
圧電素子21、22及び補強板23は、駆動信号(第1駆動信号、第2駆動信号)が供給されることによって振動する。よって、以下の説明において圧電素子21、22及び補強板23のことを振動体ともいう。
【0029】
当接部24は、補強板23の一方(ローター30側)の短辺における幅方向の中央部に設けられており、振動体の振動に応じてローター30と当接しローター30を回転させる。
【0030】
固定部材25は、補強板23の両側の長辺における長手方向の中央部にそれぞれ設けられている。この各固定部材25は螺子等によって、例えば不図示の基台に固定される。これにより固定部材25は、振動体を支持する。また、上述した接地線の代替部材として用いることもできる。
【0031】
≪圧電アクチュエーターの駆動について≫
本実施形態の制御部200は、駆動信号生成部100で生成される駆動信号に基づいて振動体を長手方向及び幅方向に振動させ、当接部24を楕円運動させる。そして、この楕円運動の際に、当接部24をローター30に当接させてローター30を回転させる。なお、制御部200は、ローター30の回転させる際に、停止状態から所定速度まで加速する加速域、所定速度を維持する定速域、及び、所定速度から停止状態まで減速する減速域、を有する速度プロファイルに基づいて回転するように制御を行う。以下の説明において加速域と減速域をまとめて加減速域ともいう。
【0032】
このように本実施形態では、振動体が長手方向に振動する振動モード(縦振動モード:第1振動モードに相当する)と、振動体が幅方向に振動する振動モード(屈曲振動モード:第2振動モードに相当する)の2つの振動モードを用いる。以下各振動モードについて説明する。
【0033】
<縦振動モード>
図3Aは縦振動モードの簡略説明図である。制御部200が第1駆動信号を圧電素子21の第1電極26に供給すると、長手方向に沿って振動体が伸縮する縦振動モードの振動が励起される。この振動の振幅は、第1電極26に供給される第1駆動信号の電圧振幅に依存する。すなわち、第1駆動信号の電圧振幅が大きいほど縦振動モードの振動の振幅(以下、単に縦振動モードの振幅ともいう)が大きくなり、逆に、第1駆動信号の電圧振幅が小さいほど縦振動モードの振幅が小さくなる。
【0034】
<屈曲振動モード>
図3Bは屈曲振動モードの説明図である。制御部200が第2駆動信号を圧電素子21の1対の第2電極27に供給すると、各第2電極27はそれぞれ長手方向に伸縮する。すなわち第2電極27の部分では縦振動モードの振動が起こる。一方、第3電極28の部分では縦振動モードの振動が起こらないため、振動体の長手方向の中心線に沿ってアンバランスな状態となる。これにより、図3Bに示すように、振動体には、長手方向に直交する方向(幅方向)に屈曲する屈曲振動モードの振動が励起される。この振動の振幅は、第2駆動信号の電圧振幅に依存する。すなわち、第2駆動信号の電圧振幅が大きいほど屈曲振動モードの振動の振幅(以下、単に屈曲振動モードの振幅ともいう)が大きくなり、逆に、第2駆動信号の電圧振幅が小さいほど屈曲振動モードの振幅が小さくなる。
【0035】
なお、図3A、図3Bでは、振動体の上面側(圧電素子21側)しか図示していないが、振動体の下面側(圧電素子22側)も同一構成となっており、圧電素子21側と同様に縦振動モードと屈曲振動モードが励起される。具体的には、第1駆動信号によって縦振動モードが励起され、第2駆動信号によって、圧電素子21の屈曲と同じ方向に屈曲する屈曲振動モードが励起される。
【0036】
<楕円運動について>
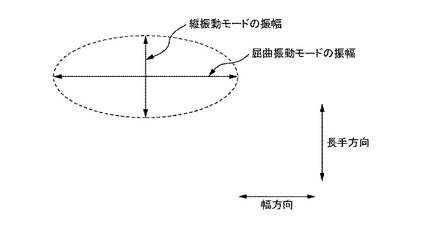
図4は、ローター30を回転させる際の当接部24の運動(楕円運動)の説明図である。また、図5は、楕円の軌跡の説明図である。
【0037】
第1駆動信号を第1電極26に供給し、第2駆動信号を第2電極27に供給すると、当接部24は、図4に示すように縦振動モードと屈曲振動モードとを組み合わせた楕円の軌跡(図の点線)を描くように移動する。そして、当接部24は、この楕円の軌跡を描く際に、当該軌道の長手方向のローター30側の端部でローター30と当接し、ローター30を矢印の方向に回転させる。
【0038】
図5に示す楕円の軌跡における長手方向の変位量(振幅)は、縦振動モードの振幅に依存する。この振幅が大きいと、当接部24をローター30に押し付ける力(押圧力)が大きくなる。しかし、この場合、当接部24がローター30から受ける反力も大きくなる。逆に、この振幅が小さいと押圧力が低くなり、当接部24がローター30と当接する際に滑りやすくなる。
【0039】
一方、楕円の軌跡における幅方向の変位量(振幅)は、屈曲振動モードの振幅に依存する。この振幅が大きいとローター30の回転速度を速めることができるが、ローター30の回転が安定していないとき(例えば動き始め)にこの振幅を大きくすると、当接部24とローター30が滑りやすくなる。
【0040】
≪比較例≫
もし仮に、ローター30の回転速度に関係なく、図4に示す楕円と同一形状の楕円の軌道でローター30を駆動させるとする。この場合、ローター30を安定して回転させることができない可能性がある。
【0041】
例えば、楕円運動の軌道を小さくすると、振動体の長手方向の振動(縦振動モードの振幅)も小さくなる。このため、例えば押圧力が必要な加減速域において、当接部24とローター30が滑りやすくなるおそれがある。また、楕円運動の軌道を小さくすると、振動体の幅方向の振動(屈折振動モードの振幅)も小さくなる。このため、定速域において、所望の回転速度が得られなくなるおそれがある。
【0042】
一方、楕円運動の軌道を大きくすると、振動体の長手方向の振動(縦振動モードの振幅)も大きくなる。このため、例えば、定速域において、ローター30が回転し難くなり、ローター30が回転する際にエネルギーを無駄に消費するおそれがある。
【0043】
≪本実施形態≫
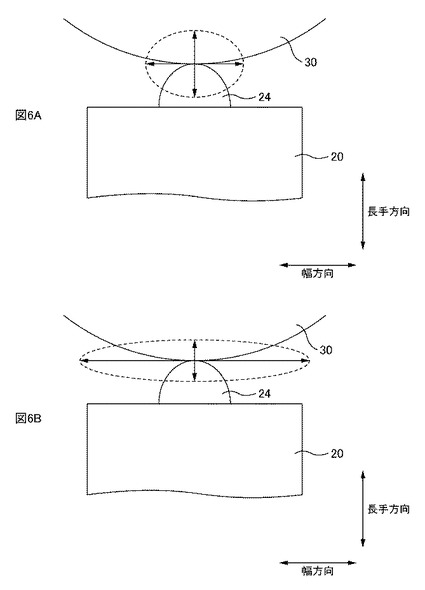
図6は本実施形態の駆動方法の説明図である。図6Aは加減速域における楕円軌道の一例を示し、図6Bは定速域における楕円軌道の一例を示している。
【0044】
前述したように、本実施形態の制御部200は、第1波形調整部210と第2波形調整部220を有している。そして、制御部200は、駆動信号生成部100で生成された駆動信号の波形を第1波形調整部210と第2波形調整部220においてそれぞれ調整し、第1駆動信号、第2駆動信号として圧電アクチュエーター20に出力している。これにより、縦振動モードの振幅と、屈曲振動モードの振幅を別々に制御している。
【0045】
例えば加減速域では、図6Aに示すように、長手方向の振幅(縦振動モードの振幅)を大きくし、さらに、幅方向の振幅(屈曲振動モードの振幅)を小さくしている。つまり、制御部200は、第1駆動信号の電圧振幅を大きくし、第2駆動信号の電圧振幅を小さくする。こうすることにより、当接部24をローター30に強く押圧させることができ、且つ、幅方向には強い力が加わらないので、当接部24とローター30とが当接する際の、当接部24とローター30の滑りを抑制できる。
【0046】
一方、定速域では、図6Bに示すように、長手方向の振幅(縦振動モードの振幅)を小さくし、さらに、幅方向の振幅(屈曲振動モードの振幅)を大きくしている。つまり、制御部200は、第1駆動信号の電圧振幅を小さくし、第2駆動信号の電圧振幅を大きくする。こうすることにより、当接部24をローター30に押圧することによるエネルギーの無駄(軸損)を低減でき、且つ、幅方向に強い力を加えられるので、回転速度を高めることができる。
【0047】
本実施形態の制御部200は、ローター30が停止状態から動き始めるとき(加速域)には、図6Aの点線で示す軌道を描くように当接部24を略楕円運動させる。なお、このとき、長手方向にはローター30の静止摩擦係数に対応した押圧力が必要である。このため、その押圧力以上となるように長手方向の振幅(縦振動モードの振幅)が設定される。ただし、この振幅が大きすぎると、ローター30からの反力により振動体が異常振動を起こしてしまうおそれがある。このため、縦振動モードの振幅は、異常振動が発生する場合の振幅より小さくなるように設定されている。これにより振動体の異常振動を防止している。
【0048】
制御部200は、回転速度検出部300の検出結果に基づき、ローター30の回転速度が上昇するにつれて、屈曲振動モードの振動の振幅を大きくし、縦振動モードの振動の振幅を小さくする。こうすることにより、滑りを抑制しつつ回転速度を上げることができる。また、滑りを抑制できることにより、当接部24の耐摩耗性を向上させることができる。
【0049】
そして、定速域では、制御部200は、図6Bのように幅方向の振幅(屈曲振動モードの振幅)を最大にし、長辺方向の振幅(縦振動モードの振幅)を最小にする。なお、定速域からローター30を停止させる際(減速域)には、制御部200は、上記と逆の制御を行う。
【0050】
以上説明したように、本実施形態では、圧電アクチュエーター20を駆動する際に、長手方向に振動体を伸縮させる縦振動モードと、幅方向に振動体を屈曲させる屈曲振動モードを同時に、且つ、独立して行っている。そして、ローター30の回転を加速又は減速させる場合(加減速域)では、ローター30を定速で回転させる場合(定速域)よりも、縦振動モードの振幅を大きくし、且つ、屈曲振動モードの振幅を小さくしている。
【0051】
こうすることにより、加減速域では、当接部24とローター30の滑りを抑制でき、かつ、定速域ではエネルギーの消費を抑制しつつ回転速度を速めることができる。このように圧電アクチュエーター20によるローター30の駆動の最適化を図ることができる。
【0052】
===その他の実施形態===
上記の実施形態は、本発明の理解を容易にするためのものであり、本発明を限定して解釈するためのものではない。本発明は、その趣旨を逸脱することなく、変更、改良され得ると共に、本発明にはその等価物が含まれることは言うまでもない。
【0053】
<駆動対象物について>
前述した実施形態の圧電アクチュエーターでは、駆動の対象物(被駆動体)がローター30であったので、当接部24によってローター30を回転するようにしていたが、これには限らない。例えば平板形状の被駆動体に当接部24を当接させることによって、該被駆動体を直線的に駆動するようにしてもよい。
【0054】
<振動体について>
前述した実施形態において振動体は、圧電素子21、22及び補強板23で構成されていたが、これには限らない。例えば、補強板23の一方の面に圧電素子を設けて振動体を構成してもよい。あるいは、補強板23を用いずに圧電素子だけで振動体を構成するようにしてもよい。ただし、この場合、撓みが生じやすくなるおそれがある。また、例えば、落下したときや、螺子止めの際に、割れてしまうおそれがある。本実施形態のように補強板23を圧電素子21、22で挟むような構成すると、固定を確実に行うことができるとともに、強度を高めることができ、割れの発生のおそれを軽減できる。
【0055】
また、本実施形態では補強板23にはアルミニウムが用いられていたが、アルミニウム以外の金属を用いて補強板23を形成してもよい。例えば42Niアロイを用いてもよい。
【0056】
また、本実施形態では圧電素子21、22にはチタン酸ジルコン酸鉛が用いられていたが、これには限られない。例えば、水晶、ニオブ酸リチウム、チタン酸バリウム、チタン酸鉛、メタニオブ酸鉛、ポリフッ化ビニリデン、亜鉛ニオブ酸鉛、スカンジウムニオブ酸鉛などを用いてもよい。
【0057】
<駆動信号について>
前述した実施形態では、第1駆動信号および第2駆動信号は共に駆動信号生成部100で生成されていたが、これには限られない。例えば、駆動信号生成部を複数設けて第1駆動信号および第2駆動信号をそれぞれ別に生成してもよい。なお、その場合もローター30の回転速度の検出結果に応じて各駆動信号の波形をそれぞれ調整するようにすればよい。
【0058】
<ローターの回転について>
前述した実施形態では、ローター30を一方向(反時計回り方向)のみに回転させていたが、両方向に回転するようにしてもよい。例えば、対角線上の一対の第3電極28の箇所にも一対の第2電極27と同様の電極を設け、第2駆動信号を供給する第2電極27の対の組み合わせをスイッチ等で切り替えることで、ローター30を反時計回り方向と時計回り方向に回転方向を切り替えるようにしてもよい。
【0059】
<回転速度検出部について>
前述した実施形態では、回転速度検出部300を設けることによりローター30の回転速度を検出していたが、ローター30の回転速度を検出しなくてもよい。例えば、位相検出用の第3電極28の検出結果からローター30の回転速度を推定し、その推定結果に基づいて振動体の振動の制御を行うようにしてもよい。
【0060】
<縦振動モードの振幅について>
前述した実施形態では、縦振動モードの振幅をローター30の回転速度に応じて変えていたが、段階的に変えてもよい。例えば、ローター30が動きだすとき(振幅大)と、定速域などローター30回転がしているとき(振幅小)の2段階に変えるようにしてもよい。
【符号の説明】
【0061】
20 圧電アクチュエーター、21,22 圧電素子、23 補強板、
24 当接部、25 固定部材、
26 第1電極、27 第2電極、28 第3電極、
30 ローター、31 回転軸、
100 駆動信号生成部、200 制御部、
210 第1波形調整部、220 第2波形調整部、
300 回転速度検出部
【技術分野】
【0001】
本発明は、圧電アクチュエーターの駆動方法に関する。
【背景技術】
【0002】
被駆動体(例えばローター)を駆動させる圧電アクチュエーターとして、圧電素子(ピエゾ素子)によって振動体を長さ方向に伸縮させる伸縮振動(縦振動ともいう)と、振動体を面方向に屈曲させる屈曲振動とを用いるものが知られている。例えば特許文献1では、伸縮振動と屈曲振動とによって、振動体に設けられた当接部を、略楕円の軌道を描くように運動(楕円運動)させている。そして、楕円運動に応じて当接部を被駆動体に当接させて被駆動体を駆動している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−166816号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来、被駆動体の駆動速度に関わらず、楕円運動の軌道の形状が一定であった。このため、被駆動体を安定して駆動することができない可能性があった。例えば、被駆動体が停止状態から動き始めるときに、屈折振動の振幅が大きいと当接部が被駆動体に当接したとき、滑りが生じるおそれがある。そこで屈折振動の振幅を小さくすると、楕円運動の軌道が小さくなり、伸縮振動の振幅も小さくなってしまう。この場合、結果的に当接部と被駆動体とが滑りやすくなり、滑りを抑制できないおそれがあった。また、例えば屈折振動の振幅を大きくすると、楕円運動の軌道が大きくなり伸縮振動の振幅も大きくなる。この場合、被駆動体が駆動し難くなり、被駆動体を駆動させるのにエネルギーを無駄に消費してしまうおそれがあった。
そこで本発明は、被駆動体の駆動の最適化を図ることを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するための主たる発明は、
圧電素子に駆動信号が供給されることに基づいて振動する振動体を備え、前記振動体の振動を被駆動体に伝えて前記被駆動体を駆動させる圧電アクチュエーターの駆動方法であって、
前記被駆動体の駆動方向と交差する方向に前記振動体を伸縮させる第1振動モードと、
前記被駆動体の駆動方向に前記振動体を屈曲させる第2振動モードであって、前記第1振動モードとは独立した第2振動モードと、
を同時に実行し、
前記被駆動体の駆動を加速又は減速させる場合には、前記被駆動体を定速で駆動させる場合よりも、前記第1振動モードの振動の振幅を大きくし、且つ、前記第2振動モードの振動の振幅を小さくする、
ことを特徴とする圧電アクチュエーターの駆動方法である。
【0006】
本発明の他の特徴については、本明細書及び添付図面の記載により明らかにする。
【図面の簡単な説明】
【0007】
【図1】本実施形態における圧電アクチュエーターを用いた駆動ユニットの概略構成図である。
【図2】本実施形態における圧電アクチュエーター付近の側面図である。
【図3】図3Aは縦振動モードの簡略説明図であり、図3Bは屈曲振動モードの簡略説明図である。
【図4】ローターを回転させる際の当接部の運動の説明図である。
【図5】楕円の軌跡の説明図である。
【図6】本実施形態の駆動方法の説明図である。図6Aは加減速域における楕円軌道を示し、図6Bは定速域における楕円軌道を示している。
【発明を実施するための形態】
【0008】
本明細書及び添付図面の記載により、少なくとも、以下の事項が明らかとなる。
【0009】
圧電素子に駆動信号が供給されることに基づいて振動する振動体を備え、前記振動体の振動を被駆動体に伝えて前記被駆動体を駆動させる圧電アクチュエーターの駆動方法であって、
前記被駆動体の駆動方向と交差する方向に前記振動体を伸縮させる第1振動モードと、
前記被駆動体の駆動方向に前記振動体を屈曲させる第2振動モードであって、前記第1振動モードとは独立した第2振動モードと、
を同時に実行し、
前記被駆動体の駆動を加速又は減速させる場合には、前記被駆動体を定速で駆動させる場合よりも、前記第1振動モードの振動の振幅を大きくし、且つ、前記第2振動モードの振動の振幅を小さくする、
ことを特徴とする圧電アクチュエーターの駆動方法が明らかとなる。
【0010】
このような駆動方法によれば、被駆動体の駆動を加速又は減速させる際には、被駆動体と振動体(当接部)の滑りを防止でき安定して駆動できる。また、被駆動体を定速で駆動させる際にはエネルギーを無駄に消費しないようにできるとともに、被駆動体の駆動速度を速めることができる。よって、被駆動体の駆動の最適化を図ることができる。
【0011】
かかる圧電アクチュエーターの駆動方法であって、前記被駆動体の駆動速度を検出し、当該駆動速度の検出結果に応じて、前記第1振動モードの振動の振幅、及び、前記第2振動モードの振動の振幅をそれぞれ変更することが望ましい。
このような駆動方法によれば、被駆動体の駆動をより確実に制御できる。
【0012】
かかる圧電アクチュエーターの駆動方法であって、前記第2振動モードの振動の振幅は、前記駆動速度に依存するように変更することが望ましい。
このような駆動方法によれば、被駆動体と振動体(当接部)の滑りを抑制しつつ駆動速度を変えることができる。
【0013】
かかる圧電アクチュエーターの駆動方法であって、前記被駆動体の駆動を加速又は減速させるときの前記第1振動モードの振動の振幅は、所定値以下であることが望ましい。
このような駆動方法によれば、異常振動の発生を抑制することができる。
【0014】
以下、本発明の実施形態を、図面を参照しつつ説明する。
【0015】
===実施形態===
≪駆動ユニットの構成について≫
図1は、本実施形態における圧電アクチュエーターを用いた駆動ユニットの概略構成図である。また、図2は、本実施形態における圧電アクチュエーター付近の側面図である。なお、図2では、便宜上、後述する固定部材25の図示を省略している。本実施形態の駆動ユニットは、例えばマイクロポンプや携帯型機器などの機器を駆動するためのユニットである。
【0016】
図1に示す本実施形態の駆動ユニットは、圧電アクチュエーター20、ローター30、駆動信号生成部100、制御部200、及び回転速度検出部300を備えている。
【0017】
圧電アクチュエーター20は、後述する駆動信号生成部100で生成された駆動信号に基づいて振動し、その振動によってローター30(被駆動体に相当する)を回転させる。図1に示すように、本実施形態の圧電アクチュエーター20は、矩形形状に設けられている。以下の説明において、その長辺方向のことを長手方向とよび、短辺方向のことを幅方向とよぶ。なお、圧電アクチュエーター20の構成については後述する。
【0018】
ローター30は、円筒形状の回転体であり、円の中央には回転軸31が設けられている。圧電アクチュエーター20の当接部24(後述する)が圧電アクチュエーター20の振動に応じてローター30と当接することによって、ローター30は、回転軸31を中心に回転する。なお、本実施形態において、ローター30は、図1における反時計回り方向(図の矢印方向)のみに回転するように制御される。
【0019】
駆動信号生成部100は、所定周期の駆動信号を生成する。本実施形態の駆動信号生成部100は、周期的にハイレベルとローレベルとに切り替わる矩形波の駆動信号を生成する。なお、駆動信号の波形はこれには限定されず、例えば、正弦波、三角波、あるいは台形波などであってもよい。
【0020】
制御部200は、駆動信号100によって生成された駆動信号の波形形状を調整することによって、圧電アクチュエーター20の駆動を制御する。本実施形態の制御部200は、第1波形調整部210と第2波形調整部220を備えている。各調整部は、駆動信号の波形の位相を調整する位相調整回路(例えば遅延回路)、及び、駆動信号の電圧振幅を調整する増幅回路を備えており、駆動信号の波形をそれぞれ独立して調整する。なお、以下の説明において、第1波形調整部210によって調整された駆動信号のことを第1駆動信号とよび、第2波形調整部220によって調整された駆動信号のことを第2駆動信号とよぶ。第1駆動信号及び第2駆動信号は、波形の位相や振幅の大きさがそれぞれ異なる信号であり、ともに圧電アクチュエーター20に供給される。
【0021】
回転速度検出部300は、ローター30の回転速度を検出し、その検出結果を制御部200に出力する。この回転速度検出部300の検出結果に基づいて、制御部200は、圧電アクチュエーター20の駆動を制御する。
【0022】
≪圧電アクチュエーターの構成について≫
圧電アクチュエーター20は、圧電素子21、22、補強板23、当接部24、及び固定部材25を有している。
【0023】
補強板23は、例えばアルミニウムなどの金属によって形成された矩形状の板部材である。補強板23には、後述する当接部24及び固定部材25が設けられている。また、補強板23には不図示の接地線が接続されており、当該補強板23は接地されている。
【0024】
圧電素子21、22は、例えば、チタン酸ジルコン酸鉛によって形成されたものであり、それぞれ補強板23と同様の矩形形状に設けられている。図2に示すように圧電素子21は、補強板23の上面側に配置され、圧電素子22は、補強板23の下面側に配置されている。すなわち、圧電素子21と圧電素子22によって補強板23を挟んだ構成となっている。また、図1に示すように圧電素子21の上面には、幅方向の中央部分において長手方向に沿った第1電極26が形成されている。また、その第1電極26を挟んだ対角線上には、1対の第2電極27が形成されている。これらの各電極は、圧電素子21の表面に例えば、ニッケルめっき層及び金めっき層が形成されて設けられたものである。
【0025】
各第2電極27は、圧電素子21の面中心に対して、回転対称に配置されるとともに、不図示のリード線などによって電気的に接続されている。なお、第1電極26には第1駆動信号(第1波形調整部210を通った駆動信号)が供給され、第2電極27には第2駆動信号(第2波形調整部220を通った駆動信号)が供給される。
【0026】
また、1対の第2電極27とは逆の対角線上には、第3電極28が設けられている。この第3電極28は、振動体の振動の位相を検出するために設けられた位相検出用の電極である。各第3電極28による検出結果は制御部200に出力される。
【0027】
なお、補強板23の下側の圧電素子22にも圧電素子21に形成された各電極と同じ電極が同様の配置となるように設けられている(図2参照)。また、圧電素子22の第1電極26、第2電極27にもそれぞれ圧電素子21の各電極と同じ駆動信号が供給される。
【0028】
圧電素子21、22及び補強板23は、駆動信号(第1駆動信号、第2駆動信号)が供給されることによって振動する。よって、以下の説明において圧電素子21、22及び補強板23のことを振動体ともいう。
【0029】
当接部24は、補強板23の一方(ローター30側)の短辺における幅方向の中央部に設けられており、振動体の振動に応じてローター30と当接しローター30を回転させる。
【0030】
固定部材25は、補強板23の両側の長辺における長手方向の中央部にそれぞれ設けられている。この各固定部材25は螺子等によって、例えば不図示の基台に固定される。これにより固定部材25は、振動体を支持する。また、上述した接地線の代替部材として用いることもできる。
【0031】
≪圧電アクチュエーターの駆動について≫
本実施形態の制御部200は、駆動信号生成部100で生成される駆動信号に基づいて振動体を長手方向及び幅方向に振動させ、当接部24を楕円運動させる。そして、この楕円運動の際に、当接部24をローター30に当接させてローター30を回転させる。なお、制御部200は、ローター30の回転させる際に、停止状態から所定速度まで加速する加速域、所定速度を維持する定速域、及び、所定速度から停止状態まで減速する減速域、を有する速度プロファイルに基づいて回転するように制御を行う。以下の説明において加速域と減速域をまとめて加減速域ともいう。
【0032】
このように本実施形態では、振動体が長手方向に振動する振動モード(縦振動モード:第1振動モードに相当する)と、振動体が幅方向に振動する振動モード(屈曲振動モード:第2振動モードに相当する)の2つの振動モードを用いる。以下各振動モードについて説明する。
【0033】
<縦振動モード>
図3Aは縦振動モードの簡略説明図である。制御部200が第1駆動信号を圧電素子21の第1電極26に供給すると、長手方向に沿って振動体が伸縮する縦振動モードの振動が励起される。この振動の振幅は、第1電極26に供給される第1駆動信号の電圧振幅に依存する。すなわち、第1駆動信号の電圧振幅が大きいほど縦振動モードの振動の振幅(以下、単に縦振動モードの振幅ともいう)が大きくなり、逆に、第1駆動信号の電圧振幅が小さいほど縦振動モードの振幅が小さくなる。
【0034】
<屈曲振動モード>
図3Bは屈曲振動モードの説明図である。制御部200が第2駆動信号を圧電素子21の1対の第2電極27に供給すると、各第2電極27はそれぞれ長手方向に伸縮する。すなわち第2電極27の部分では縦振動モードの振動が起こる。一方、第3電極28の部分では縦振動モードの振動が起こらないため、振動体の長手方向の中心線に沿ってアンバランスな状態となる。これにより、図3Bに示すように、振動体には、長手方向に直交する方向(幅方向)に屈曲する屈曲振動モードの振動が励起される。この振動の振幅は、第2駆動信号の電圧振幅に依存する。すなわち、第2駆動信号の電圧振幅が大きいほど屈曲振動モードの振動の振幅(以下、単に屈曲振動モードの振幅ともいう)が大きくなり、逆に、第2駆動信号の電圧振幅が小さいほど屈曲振動モードの振幅が小さくなる。
【0035】
なお、図3A、図3Bでは、振動体の上面側(圧電素子21側)しか図示していないが、振動体の下面側(圧電素子22側)も同一構成となっており、圧電素子21側と同様に縦振動モードと屈曲振動モードが励起される。具体的には、第1駆動信号によって縦振動モードが励起され、第2駆動信号によって、圧電素子21の屈曲と同じ方向に屈曲する屈曲振動モードが励起される。
【0036】
<楕円運動について>
図4は、ローター30を回転させる際の当接部24の運動(楕円運動)の説明図である。また、図5は、楕円の軌跡の説明図である。
【0037】
第1駆動信号を第1電極26に供給し、第2駆動信号を第2電極27に供給すると、当接部24は、図4に示すように縦振動モードと屈曲振動モードとを組み合わせた楕円の軌跡(図の点線)を描くように移動する。そして、当接部24は、この楕円の軌跡を描く際に、当該軌道の長手方向のローター30側の端部でローター30と当接し、ローター30を矢印の方向に回転させる。
【0038】
図5に示す楕円の軌跡における長手方向の変位量(振幅)は、縦振動モードの振幅に依存する。この振幅が大きいと、当接部24をローター30に押し付ける力(押圧力)が大きくなる。しかし、この場合、当接部24がローター30から受ける反力も大きくなる。逆に、この振幅が小さいと押圧力が低くなり、当接部24がローター30と当接する際に滑りやすくなる。
【0039】
一方、楕円の軌跡における幅方向の変位量(振幅)は、屈曲振動モードの振幅に依存する。この振幅が大きいとローター30の回転速度を速めることができるが、ローター30の回転が安定していないとき(例えば動き始め)にこの振幅を大きくすると、当接部24とローター30が滑りやすくなる。
【0040】
≪比較例≫
もし仮に、ローター30の回転速度に関係なく、図4に示す楕円と同一形状の楕円の軌道でローター30を駆動させるとする。この場合、ローター30を安定して回転させることができない可能性がある。
【0041】
例えば、楕円運動の軌道を小さくすると、振動体の長手方向の振動(縦振動モードの振幅)も小さくなる。このため、例えば押圧力が必要な加減速域において、当接部24とローター30が滑りやすくなるおそれがある。また、楕円運動の軌道を小さくすると、振動体の幅方向の振動(屈折振動モードの振幅)も小さくなる。このため、定速域において、所望の回転速度が得られなくなるおそれがある。
【0042】
一方、楕円運動の軌道を大きくすると、振動体の長手方向の振動(縦振動モードの振幅)も大きくなる。このため、例えば、定速域において、ローター30が回転し難くなり、ローター30が回転する際にエネルギーを無駄に消費するおそれがある。
【0043】
≪本実施形態≫
図6は本実施形態の駆動方法の説明図である。図6Aは加減速域における楕円軌道の一例を示し、図6Bは定速域における楕円軌道の一例を示している。
【0044】
前述したように、本実施形態の制御部200は、第1波形調整部210と第2波形調整部220を有している。そして、制御部200は、駆動信号生成部100で生成された駆動信号の波形を第1波形調整部210と第2波形調整部220においてそれぞれ調整し、第1駆動信号、第2駆動信号として圧電アクチュエーター20に出力している。これにより、縦振動モードの振幅と、屈曲振動モードの振幅を別々に制御している。
【0045】
例えば加減速域では、図6Aに示すように、長手方向の振幅(縦振動モードの振幅)を大きくし、さらに、幅方向の振幅(屈曲振動モードの振幅)を小さくしている。つまり、制御部200は、第1駆動信号の電圧振幅を大きくし、第2駆動信号の電圧振幅を小さくする。こうすることにより、当接部24をローター30に強く押圧させることができ、且つ、幅方向には強い力が加わらないので、当接部24とローター30とが当接する際の、当接部24とローター30の滑りを抑制できる。
【0046】
一方、定速域では、図6Bに示すように、長手方向の振幅(縦振動モードの振幅)を小さくし、さらに、幅方向の振幅(屈曲振動モードの振幅)を大きくしている。つまり、制御部200は、第1駆動信号の電圧振幅を小さくし、第2駆動信号の電圧振幅を大きくする。こうすることにより、当接部24をローター30に押圧することによるエネルギーの無駄(軸損)を低減でき、且つ、幅方向に強い力を加えられるので、回転速度を高めることができる。
【0047】
本実施形態の制御部200は、ローター30が停止状態から動き始めるとき(加速域)には、図6Aの点線で示す軌道を描くように当接部24を略楕円運動させる。なお、このとき、長手方向にはローター30の静止摩擦係数に対応した押圧力が必要である。このため、その押圧力以上となるように長手方向の振幅(縦振動モードの振幅)が設定される。ただし、この振幅が大きすぎると、ローター30からの反力により振動体が異常振動を起こしてしまうおそれがある。このため、縦振動モードの振幅は、異常振動が発生する場合の振幅より小さくなるように設定されている。これにより振動体の異常振動を防止している。
【0048】
制御部200は、回転速度検出部300の検出結果に基づき、ローター30の回転速度が上昇するにつれて、屈曲振動モードの振動の振幅を大きくし、縦振動モードの振動の振幅を小さくする。こうすることにより、滑りを抑制しつつ回転速度を上げることができる。また、滑りを抑制できることにより、当接部24の耐摩耗性を向上させることができる。
【0049】
そして、定速域では、制御部200は、図6Bのように幅方向の振幅(屈曲振動モードの振幅)を最大にし、長辺方向の振幅(縦振動モードの振幅)を最小にする。なお、定速域からローター30を停止させる際(減速域)には、制御部200は、上記と逆の制御を行う。
【0050】
以上説明したように、本実施形態では、圧電アクチュエーター20を駆動する際に、長手方向に振動体を伸縮させる縦振動モードと、幅方向に振動体を屈曲させる屈曲振動モードを同時に、且つ、独立して行っている。そして、ローター30の回転を加速又は減速させる場合(加減速域)では、ローター30を定速で回転させる場合(定速域)よりも、縦振動モードの振幅を大きくし、且つ、屈曲振動モードの振幅を小さくしている。
【0051】
こうすることにより、加減速域では、当接部24とローター30の滑りを抑制でき、かつ、定速域ではエネルギーの消費を抑制しつつ回転速度を速めることができる。このように圧電アクチュエーター20によるローター30の駆動の最適化を図ることができる。
【0052】
===その他の実施形態===
上記の実施形態は、本発明の理解を容易にするためのものであり、本発明を限定して解釈するためのものではない。本発明は、その趣旨を逸脱することなく、変更、改良され得ると共に、本発明にはその等価物が含まれることは言うまでもない。
【0053】
<駆動対象物について>
前述した実施形態の圧電アクチュエーターでは、駆動の対象物(被駆動体)がローター30であったので、当接部24によってローター30を回転するようにしていたが、これには限らない。例えば平板形状の被駆動体に当接部24を当接させることによって、該被駆動体を直線的に駆動するようにしてもよい。
【0054】
<振動体について>
前述した実施形態において振動体は、圧電素子21、22及び補強板23で構成されていたが、これには限らない。例えば、補強板23の一方の面に圧電素子を設けて振動体を構成してもよい。あるいは、補強板23を用いずに圧電素子だけで振動体を構成するようにしてもよい。ただし、この場合、撓みが生じやすくなるおそれがある。また、例えば、落下したときや、螺子止めの際に、割れてしまうおそれがある。本実施形態のように補強板23を圧電素子21、22で挟むような構成すると、固定を確実に行うことができるとともに、強度を高めることができ、割れの発生のおそれを軽減できる。
【0055】
また、本実施形態では補強板23にはアルミニウムが用いられていたが、アルミニウム以外の金属を用いて補強板23を形成してもよい。例えば42Niアロイを用いてもよい。
【0056】
また、本実施形態では圧電素子21、22にはチタン酸ジルコン酸鉛が用いられていたが、これには限られない。例えば、水晶、ニオブ酸リチウム、チタン酸バリウム、チタン酸鉛、メタニオブ酸鉛、ポリフッ化ビニリデン、亜鉛ニオブ酸鉛、スカンジウムニオブ酸鉛などを用いてもよい。
【0057】
<駆動信号について>
前述した実施形態では、第1駆動信号および第2駆動信号は共に駆動信号生成部100で生成されていたが、これには限られない。例えば、駆動信号生成部を複数設けて第1駆動信号および第2駆動信号をそれぞれ別に生成してもよい。なお、その場合もローター30の回転速度の検出結果に応じて各駆動信号の波形をそれぞれ調整するようにすればよい。
【0058】
<ローターの回転について>
前述した実施形態では、ローター30を一方向(反時計回り方向)のみに回転させていたが、両方向に回転するようにしてもよい。例えば、対角線上の一対の第3電極28の箇所にも一対の第2電極27と同様の電極を設け、第2駆動信号を供給する第2電極27の対の組み合わせをスイッチ等で切り替えることで、ローター30を反時計回り方向と時計回り方向に回転方向を切り替えるようにしてもよい。
【0059】
<回転速度検出部について>
前述した実施形態では、回転速度検出部300を設けることによりローター30の回転速度を検出していたが、ローター30の回転速度を検出しなくてもよい。例えば、位相検出用の第3電極28の検出結果からローター30の回転速度を推定し、その推定結果に基づいて振動体の振動の制御を行うようにしてもよい。
【0060】
<縦振動モードの振幅について>
前述した実施形態では、縦振動モードの振幅をローター30の回転速度に応じて変えていたが、段階的に変えてもよい。例えば、ローター30が動きだすとき(振幅大)と、定速域などローター30回転がしているとき(振幅小)の2段階に変えるようにしてもよい。
【符号の説明】
【0061】
20 圧電アクチュエーター、21,22 圧電素子、23 補強板、
24 当接部、25 固定部材、
26 第1電極、27 第2電極、28 第3電極、
30 ローター、31 回転軸、
100 駆動信号生成部、200 制御部、
210 第1波形調整部、220 第2波形調整部、
300 回転速度検出部
【特許請求の範囲】
【請求項1】
圧電素子に駆動信号が供給されることに基づいて振動する振動体を備え、前記振動体の振動を被駆動体に伝えて前記被駆動体を駆動させる圧電アクチュエーターの駆動方法であって、
前記被駆動体の駆動方向と交差する方向に前記振動体を伸縮させる第1振動モードと、
前記被駆動体の駆動方向に前記振動体を屈曲させる第2振動モードであって、前記第1振動モードとは独立した第2振動モードと、
を同時に実行し、
前記被駆動体の駆動を加速又は減速させる場合には、前記被駆動体を定速で駆動させる場合よりも、前記第1振動モードの振動の振幅を大きくし、且つ、前記第2振動モードの振動の振幅を小さくする、
ことを特徴とする圧電アクチュエーターの駆動方法。
【請求項2】
請求項1に記載の圧電アクチュエーターの駆動方法であって、
前記被駆動体の駆動速度を検出し、当該駆動速度の検出結果に応じて、前記第1振動モードの振動の振幅、及び、前記第2振動モードの振動の振幅をそれぞれ変更する、
ことを特徴とする圧電アクチュエーターの駆動方法。
【請求項3】
請求項2に記載の圧電アクチュエーターの駆動方法であって、
前記第2振動モードの振動の振幅は、前記駆動速度に依存するように変更する
ことを特徴とする圧電アクチュエーターの駆動方法。
【請求項4】
請求項1〜3の何れかに記載の圧電アクチュエーターの駆動方法であって、
前記被駆動体の駆動を加速又は減速させるときの前記第1振動モードの振動の振幅は、所定値以下である
ことを特徴とする圧電アクチュエーターの駆動方法。
【請求項1】
圧電素子に駆動信号が供給されることに基づいて振動する振動体を備え、前記振動体の振動を被駆動体に伝えて前記被駆動体を駆動させる圧電アクチュエーターの駆動方法であって、
前記被駆動体の駆動方向と交差する方向に前記振動体を伸縮させる第1振動モードと、
前記被駆動体の駆動方向に前記振動体を屈曲させる第2振動モードであって、前記第1振動モードとは独立した第2振動モードと、
を同時に実行し、
前記被駆動体の駆動を加速又は減速させる場合には、前記被駆動体を定速で駆動させる場合よりも、前記第1振動モードの振動の振幅を大きくし、且つ、前記第2振動モードの振動の振幅を小さくする、
ことを特徴とする圧電アクチュエーターの駆動方法。
【請求項2】
請求項1に記載の圧電アクチュエーターの駆動方法であって、
前記被駆動体の駆動速度を検出し、当該駆動速度の検出結果に応じて、前記第1振動モードの振動の振幅、及び、前記第2振動モードの振動の振幅をそれぞれ変更する、
ことを特徴とする圧電アクチュエーターの駆動方法。
【請求項3】
請求項2に記載の圧電アクチュエーターの駆動方法であって、
前記第2振動モードの振動の振幅は、前記駆動速度に依存するように変更する
ことを特徴とする圧電アクチュエーターの駆動方法。
【請求項4】
請求項1〜3の何れかに記載の圧電アクチュエーターの駆動方法であって、
前記被駆動体の駆動を加速又は減速させるときの前記第1振動モードの振動の振幅は、所定値以下である
ことを特徴とする圧電アクチュエーターの駆動方法。
【図1】


【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【公開番号】特開2013−13218(P2013−13218A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−143842(P2011−143842)
【出願日】平成23年6月29日(2011.6.29)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月29日(2011.6.29)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]