
圧電モータの坑井内における使用
炭化水素を産出する地層内から遺留流体の試料を集めるのに使用されるサンプリングシステムに関する。このサンプリングシステムは、対象となる地層の近傍に形成された坑井内に配置されるゾンデを有する。このゾンデは、地層に挿入することのできるサンプリングプローブと、該サンプリングプローブと流体流通状態にあるドロー・ダウンポンプとを含む。ドロー・ダウンポンプは、該ポンプに連結されている、電気的に応答する部材によって駆動され、電気的に応答する部材は、圧電材料、電場応答性高分子、又はその他の電気的に応答する材料を有してなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、広く、炭化水素製造の分野に関する。より詳しくは、本発明は、炭化水素を産する地層の遺留液体をサンプルリングする装置に関する。
【背景技術】
【0002】
地下の地層に含まれている遺留液体のサンプルリングによって、炭化水素を産する可能性という点から関心の対象となり得る地層領域を試験する方法が提供される。この方法は、試験されている地層への損害を最小限に抑えつつ、実験室環境での後の分析に提供されるあらゆる地層流体のサンプルを回収する方法を含む。地層サンプルは、地下にある地層の生産可能性の実質的に点試験となる。加えて、試験中の制御と発生事項の順番との連続的な記録は地上においてなされる。この記録から、流体の圧縮性、密度、及び相対粘度を決定するデータと共に、地層の圧力及び浸透性についての貴重なデータを、油層分析用に得ることができる。
【0003】
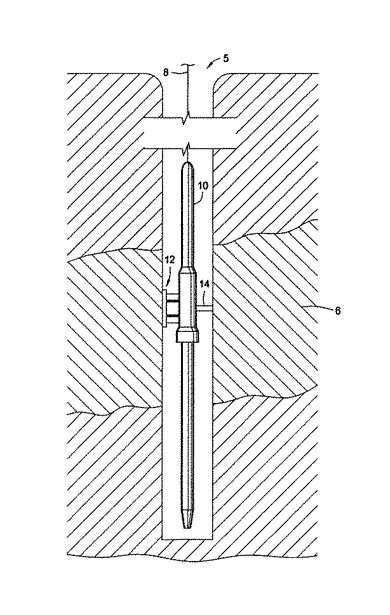
一般に、遺留流体サンプリングは、ワイヤライン8を介して坑井5内にゾンデ10を配置することを含む。ゾンデ10の外側部分には、通常、試料ポート14と押し付け手段12とが対向して配置されている。試料ポート14が対象となる地層6の近傍にあるときには、押し付け手段12を坑井5の内表面に向かって延ばし、これによって試料ポート14を地層6に挿入する。試料ポート14の挿入によって、該試料ポートは坑井5の外周面を突き抜けて、地層6中の遺留流体と試料ポート14との間の流体連絡を可能にする。以下により詳細に記載されるように、試料ポート14を地層6中に押し込んだ後に、そこに配置されたポンプ手段によって遺留流体をゾンデ10中に吸い込むことができる。
【0004】
米国特許第2,674,313号に記載されているもののような、初期の地層流体サンプリング機器は、坑井内への一度の挿入で1回の試験しかできなかったので、市場提供品として完全に成功したものではなかった。後の機器は複数回の試験に適してはいたが、これらの試験器の成功は試験対象の地層の性質にある程度依存していた。例えば、地層が固くない場合は、固い地層の場合とは異なるサンプリング装置が必要とされた。
【0005】
坑井内複数回試験機器は、坑井の壁を突き抜けて対象となる地層から流体試料を抜き出すと共に該地層内の流体圧力を測定する、拡張可能なサンプリングプローブによって展開されてきた。昔から、これらの坑井内機器は、地層から機器へと遺留流体を引き抜くために水圧又は電気によって往復動をする内部ドロー・ダウンピストンを有している。
【0006】
一般に、坑井内複数回試験サンプリング装置は、細かい砂、岩、泥壁等のサンプリングプローブが遭遇する様々な異物と共に地層から抽出される遺留流体が、比較的容積の小さいチャンバに導入されることを必要とし、器具が閉止されると遺留流体を坑井中に排出する、サンプルシステム用の流体回路を組み入れている。このような装置の例は、米国特許第4,416,152号に見出すことができる。閉止の前に、試料は、平行ではあるが別の回路を通って試料タンクに流れ込む。他の方法によると、試料は同じ流体流路を通して収集される。
【0007】
遺留流体をサンプリングするのに使用される流路の他の例が図2に示されている。ここで、遺留流体は試料ポート14とサンプリング流路22とを介してポンプ20によって地層6から誘導される。ポンプ20内でのピストン19の往復動によって圧力差が生じ、この圧力差によって遺留流体をポンプ20内に引き込む。ポンプ20の作動手段は圧力源26によって作られ、圧力流体流路24によってポンプ20に伝えられる。逆止弁28が圧力流体流路24内に計画的に配置され、サンプリング流路22はこれらの流路内で流体の流れを管理する。この流路についてはマイケルズ等(Michaels et al.)に与えられた米国特許第5,303,775号により詳細に記述されている。
【0008】
泥水濾物は、掘削工程中に地層中に押し入れられる。遺留流体の真に汚染されていない試料が集められる前に、この泥水濾物は地層から水洗除去されなければならない。この濾物が試料ポート14の内部に引っ掛かって、遺留流体がサンプリング装置に流れるのを妨げることがよくある。従来技術によるサンプリング装置は、濾物を集める第一試料タンクと遺留流体を集める第二試料タンクとを有している。この方法に係る問題は、除去される濾物の量がわかっていないことである。この理由で、汚染されていない遺留流体が識別されて分別されるまで、地層からの濾物で汚染されている地層流体をポンプで吸い上げるのが望ましい。従来の坑井内試験機器は、無制限の流体吸引能力を有しておらず、それ故に、サンプリングに先立って、汚染物質である泥水濾物の完全な水洗除去を保証することができない。
【0009】
地層の浸透性は、定法によって、1基以上のドロー・ダウンピストンで生成される圧力変化から評価される。この分析においては、ポンプによる吸引の間に流れる流体の粘度がわかっている必要がある。該流体の粘度は、その粘度がわかっている流体を機器から地層中に注入し、その粘度を回収された地層流体の粘度と比較することによって求めることができる。このようにして測定された浸透性は、オフサイトにある油井の地層と信頼性の高い比較を行うことができ、流体の回収を最適化することができる。
【0010】
穴が開口していると地層流体の性質が急速に変わることがあるので、可能な限り素早く地層流体を除去するのが重要である。しかしながら、分離が生じてしまった流体を計測しても代表的な試料にはならないので、流体圧力がその流体の「沸点圧」より低くなるのを防ぐために、地層流体の流量を制御することが重要である。溶解成分が遊離して出てきてしまえば、該成分は通常再結合することができず、流体の性質が変化した、代表的ではない試料となってしまう。
【0011】
最近開発された油層試験装置は、試料収集時に遺留流体の沸点圧を測定することができる。この装置は、液体中の気泡を検出するのに光透過性を利用する公知の技術を用いている。しかしながら、粒子状の物が流体中にある場合にはこの方法には問題があり、誤った結果が出てしまうことがある。他の方法の中には、体積がわかっている地層流体を採取し、一定の温度でその体積を徐々に増加して行くという方法がある。被測定物の体積及び圧力の変化から圧力対体積の曲線が得られ、沸点圧の値を見出すことができる。この値は、圧力と体積との関係を示すグラフがもはや直線ではない領域にある曲線内で予想される。
【0012】
残念ながら、現在使用されている、このようなサンプリング装置を備えたポンプ装置は、固有の問題を抱えている。例えば、現在使用されているポンプシステムの電気又は流体圧作動手段の制御は正確ではなく、ポンプのスピードを完全に制御することができない。ポンプのスピードを完全に制御することができないということは、遺留流体の圧力がその沸点圧よりも低くなった場合にポンプによる吸引操作を停止する能力を阻害し、また、沸点圧を正確に測定する能力を抑制することになる。その理由は、その沸点圧よりも低い圧力で遺留流体をサンプリングすることは、サンプリングデータの結果の正確性に悪い影響を与えるからである。
【0013】
【特許文献1】米国特許第2,674,313号
【特許文献2】米国特許第4,416,152号
【特許文献3】米国特許第5,303,775号
【発明の開示】
【発明が解決しようとする課題】
【0014】
したがって、その状態を変えることなく遺留流体試料を得て、公知の圧力で分析することのできる、遺留流体をサンプリングする手段への需要がある。
【課題を解決するための手段】
【0015】
ここに開示する装置は、ピストン、該ピストンを受容するシリンダ、及び前記ピストンに操作可能に連結された駆動装置を有する地層流体試験ドロー・ダウンポンプを含む。該駆動装置は、電気的刺激に応答する部材で作られている。電気的刺激に応答する部材は、圧電構造体、又は電場応答性高分子であってもよい。任意に、前記圧電構造体は単一の圧電セグメントでできているものであってもよいし、少なくとも二種の異なる圧電セグメントでできているものであってもよい。ドロー・ダウンポンプの駆動装置は、任意に、圧電モータであってもよく、該圧電モータは、リニア圧電モータ及びロータリー圧電モータよりなる群から選択される。ドロー・ダウンポンプの操作連結器は、前記駆動装置と前記ピストンとの間に配置される直接機械式取り付け具、及び圧力流体流路で形成することができる。
【0016】
地層試験ドロー・ダウンポンプは、フィードバックループとポンプ制御部とを有していてもよく、該フィードバックループは、該ポンプ制御部と協働する圧力モニタ装置を有している。この圧力モニタ装置は、前記シリンダ内の流体圧力を示すデータを与え、シリンダ内の流体圧力を示す該データに応答して、シリンダ内の流体圧力がその沸点圧より確実に大きくなるように、前記ドロー・ダウンポンプの運転を制御する。
【0017】
地下にある地層内から遺留流体をサンプリングする方法がこの明細書には開示されており、該方法は、地下にある地層の近傍の坑井内にドロー・ダウンポンプを挿入し、該ドロー・ダウンポンプと前記地下にある地層との間に流体連絡通路を設け、前記ドロー・ダウンポンプを駆動装置で動作させることを含む。本発明による方法の駆動装置は、ドロー・ダウンポンプを運転するように連結されており、電気的刺激に反応する部材を有している。この方法では、さらに、前記駆動装置に電気エネルギーを供給する。本発明の方法における前記部材は、単一のセグメント又は少なくとも二種の異なるセグメントを有してなる圧電構造体を有していてもよい。本方法の圧電構造体は、圧電モータを有していてもよく、該圧電モータは、リニア圧電モータ及びロータリー圧電モータを含む群より選択される。任意に、本発明の方法の電気的刺激に応答する部材は、電場応答性高分子を有していてもよい。
【0018】
本発明の運転連結部は、駆動装置とピストンとの間に設けられる直接機械式取り付け具を有していてもよく、また、圧力流体流路を有していてもよい。この方法は、さらに、シリンダ内の圧力をモニタする。本発明の方法は、さらにまた、モニタされたシリンダ内の圧力に基づいてドロー・ダウンポンプの運転状態を制御し、それによってシリンダ内の圧力がサンプリングされた流体の沸点圧よりも確実に高く保たれるようにすることを含む。ドロー・ダウンポンプは、一定の圧力下で、又は一定の体積流量下で動作させるのがよい。
【発明を実施するための最良の形態】
【0019】
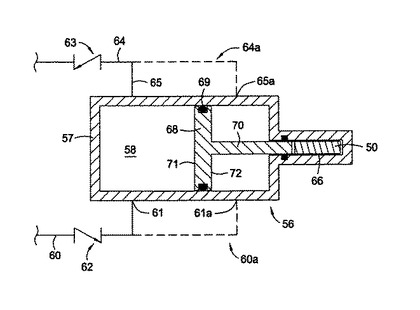
添付の図面を参照すると、本発明によるドロー・ダウンポンプ56の一態様が図4の切取図に示されている。この態様において、ドロー・ダウンポンプ56は、その一端にシリンダ58を有すると共に他端に空洞部66を有するシリンダ収容体57を備えている。このシリンダ58は実質的に円筒形であり、その内部にピストン68を受容する。円板のような形状を有するピストン68は、同様に、実質的に円形であると共にシリンダ58内を軸方向に往復動するように形成された外周面を有している。空洞部66は実質的に円筒形であるとして図示されているが、他の形状を有していてもよく、また、その長さ方向に沿って断面積が変化してもよい。後でより詳細に記載するが、空洞部66は電気的に反応する部材を収容するように形成されるのがよい。
【0020】
ピストン68の最も外側の周面には、シール部材69を配することもできる。シール部材69は、ピストン68の外周面全体に亘って圧力シールを与えることのできる、ポリマーなどの可撓性のある柔軟な材料で形成されるのがよい。この圧力シールによって、ピストン面71の側にあるシリンダ58内の圧力がピストン棒70の側のシリンダの圧力から分離される。
【0021】
図4のドロー・ダウンポンプ56は、ポンプのシリンダ収容体57に形成される導入ポート61にその端部の一方が接続されている流体導入ライン60をさらに有している。導入ポート61はシリンダ収容体57の外側を横断・貫通してシリンダ58の内部に入るので、流体導入ライン60はシリンダ58と流体流通状態にある。流体導入ライン60の他端は、サンプリングプローブ14と流体流通状態にある。流体導入ライン60に導入部逆止弁62が含まれている。流体は、導入部逆止弁62を通って導入ポート61の方にのみ流れ、逆止弁62を通って逆止弁62からサンプリングプローブ14の方に流れることはない。
【0022】
ドロー・ダウンポンプ56のこの態様は、導出ポート65にその一端が接続されると共に他端が流体貯蔵タンク(図示せず)と流体流通状態にある流体導出ライン64をさらに有している。流体導出ライン64には導出部逆止弁63が設けられており、逆止弁の向きは、ドロー・ダウンポンプ56から流体貯蔵タンクに流体は流れることができるが、流体貯蔵タンクからドロー・ダウンポンプ56へとは流れないようになっている。導入ポート61と同様に、導出ポート65はシリンダ収容体57の外面を突き抜けて形成されており、流体導出ライン64とシリンダ58との間の流体流通を可能にしている。
【0023】
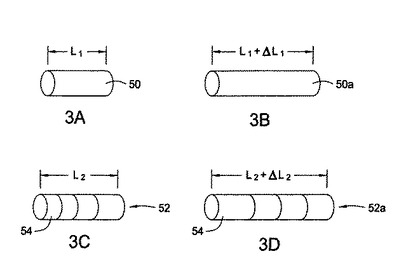
図3A〜3Dには、電気的に応答する部材(ERM)が斜視図で示されている。電気的に応答する部材は電気エネルギーを機械的エネルギーに変換し、電気的な刺激に会うと、拡張又は収縮することができる。電気的に応答する部材としては、圧電構造体、電場応答性高分子、人工筋肉等を挙げることができる。
【0024】
圧電材料に電位差が与えられると、圧電材料は拡張する張力を受ける。電位差がなくなると、張力がなくなり、圧電材料は収縮する。本発明の態様において使用可能であると見込まれる圧電材料の本発明を制限しない例には、セラミックス、石英、多結晶圧電セラミックス、ベルリン石(AlPO4)及び正リン酸ガリウム(GaPO4)等の石英類似結晶、ペロブスカイト又はタングステンブロンズ構造を有するセラミックス(BaTiO3, KnbO3, LiNbO3, LiTaO3, BiFeO3, NaxWO3, Ba2NaNb5O5, Pb2KNb5O15)等が含まれる。
【0025】
適切な電場応答性高分子としては、静電気力に反応して変形するか、又はその変形が電場を変化させる、実質的に絶縁性であるポリマー又はゴム(又は両者の組み合わせ)であれば、いかなるものであってもよい。より具体的に、好適な材料としては、シリコーンエラストマー、VHB 4910 アクリルエラストマーなどのアクリルエラストマー、ポリウレタン、熱可塑性エラストマー、PVDFを有する共重合体、圧感接着剤、フルオロエラストマー、シリコーン分子部分とアクリル分子部分とを有する重合体などを挙げることができる。前記シリコーン分子部分とアクリル分子部分とを有する重合体としては、シリコーン分子部分とアクリル分子部分とを有する共重合体、及びシリコーンエラストマーとアクリルエラストマーとを有するポリマーブレンドを例示することができる。
【0026】
図3A〜3D及び図4に示されている態様の電気的に反応する部材に関しては、該電気的に反応する部材は電気刺激を印加すると拡張する。この拡張は、図3Aと図3Bとを比較することによって示されている。張力が生じていない、又は応答していない状態にある長さL1のERM50の例が図3Aに示されている。電気的に応答する部材の拡張性を図解するために、図3Bは、この部材が与えられた電気的刺激にどのように応答するかを説明するERM 50aを示している。図3Bにおいて、ERM 50aは、図3AのERM50の長さを超えて拡張しており、その長さはL1からL1+ΔL1へと増加している(ここにおいて、L1+ΔL1はL1より大きい。)。この増加分は、電気的刺激を受けていない部材の大きさと部材に与えられた電流又は電圧の量との関数である。本発明の所望の手段と結果とを達成するために、部材の大きさと与えられる電力とを適切に決定するのは、当業者の能力の範囲内に十分あることであると考えられる。
【0027】
また、図3Cと図3Dとを参照すると、電気的に応答する部材は、軸方向に少なくとも2種のセグメントを連続的に接続してなる分節ERM52であってもよい。図3Cは、張力が発生していない状態にある分節ERM52の斜視図を示している。分節ERM52に電気エネルギーが印加されると、分節ERM52は拡張分節ERM 52a(図3D)へと拡張し、その長さがL2からL2+ΔL2になる(ここにおいて、L2+ΔL2はL2より大きい。)。分節されている態様を採用することにより、ERMの拡張を弾力的により大きく制御することができるという利点がある。ここで、選択的に電気エネルギーを与えることにより単一のセグメント54を拡張させることもできるし、また、複数のセグメント54を連続的に拡張させて、分節ERM52の拡張の進み方に影響を与えることもできる。直線的な拡張が図3A〜図3Dに図解されているが、ERM(50, 52)は半径方向にも拡張することができることを指摘しておく。
【0028】
運転の際には、対象となる地層6内にある遺留流体がサンプリングプローブ14の中に入り、流体導入ライン60中を移動して導入ポート61に入ってシリンダ58を満たす。一般に、シリンダ58が遺留流体で満たされているときは、ピストン58は下り行程にあり、空洞部66に向かって移動している。ピストン68は、流体の存在によって生じるピストン68の両側での圧力差によって、また、シリンダ58内に配置されてピストンを後方へ駆動するバネ(図示せず)によってこのように動かすことができる。
【0029】
所望量の流体がシリンダ58を満たすと、空洞部66内に配置されているERM50に電気的な刺激が印加される。ERM50の代わりに分節ERM52も使用することができるし、また、これらの様々な態様を同時に使用することもできることを指摘しておくべきであろう。先に議論したように、電気的な刺激はERM50を拡張させる。この拡張が、ピストン棒70を押して、空洞部66から押し出す。ピストン棒70が空洞部66から出て行くにつれ(上り行程)、ピストン68がシリンダ58内を移動し、シリンダ内の流体に原動力を与える。この原動力は流体を加圧し、これによって流体をシリンダ58から導出ポート65を経て流体導出ライン64を通って流体貯蔵タンクへと動かす。よく知られているように、導入部逆止弁及び導出部逆止弁(62, 63)を計画的に配置して、その導通方向を定めることにより、下り行程中に地層6からシリンダ58へと流体を流し、上り行程中にシリンダ58から流体貯蔵タンクへと流体を流すことができる。
【0030】
図4に破線で示されているように、任意に、導入ポート61aで遺留流体導入ライン60aをシリンダ収容体57に接続することができる。この態様においては、シリンダ収容体57のERMを有する空洞部66の近傍の領域において、導入ポート61aを遺留流体ポンプ56に設けている。この態様においては、ERM50の拡張によってピストン68をシリンダ58に押し付けることによって、ピストン68の後ろ側の圧力を低減し、このようにして地層6からの流体を導入する。さらに、導入ポート61aのように、この態様の導出ポート65aがERMを有する空洞部66の近傍に同様に配置される。このようにして、ERM50の拡張中にシリンダ58内に導入された流体がピストン68の下り行程でシリンダ58から押し出される。
【0031】
ドロー・ダウンポンプ56の図5に示されている態様は、その中に軸方向にピストン68aを収容するように形成された実質的に円筒状のシリンダ58aを有する、長いシリンダ収容体57aを備えている。図4に示される態様のピストン68のように、ピストン69aは、シリンダ58a内を軸方向に移動するのに適した円盤状の形態を有している。しかしながら、この態様において該ピストンに接続されている2本のピストン棒(74, 75)は、それぞれ、第1及び第2のピストン面(71a, 72a)から延びている。これらピストン棒(74, 75)は、シリンダ58aの対向する端部に設けられた対応する前方空洞部と後方空洞部(76, 73)内に入るように延在している。さらに、この態様においては、ピストン68aの両側に設けられた2つの導入ポート61aを介して、2本の流体導入ライン60aがシリンダ58aに接続されている。同様に、2本の流体導出ラインが、ピストン68aのやはり両側に位置する導出ポート65aを介してシリンダ58aに接続されている。2本の導入ライン60aは、そのもう一方の端部でサンプリングプローブと流体流通状態にあり、遺留流体がこれらのラインを通ってシリンダ58aへと流れることができる。図5に示された態様の場合のように、この態様においても、2本の流体導出ライン64aの他端は流体貯蔵タンクに接続されている。導入ライン60aには導入部逆止弁62aが含まれており、これら導入部逆止弁によって、流体の流れがシリンダ58aへと流れる方向のみに制限される。導出ライン64aにも導出部逆止弁63aが設けられており、これによって流体はシリンダから流体貯蔵タンクへと流れることはできるが、反対方向へ流れることはできない。各空洞部(76, 73)内には所定量のERM50が含まれている。
【0032】
図5に示されている態様の運転において、前方空洞部76内にあるERM51と後方空洞部73内にあるERM53とのいずれか一方を刺激することによって、ピストン68aは軸方向に動かされる。先に記述したように、電気的に応答する部材を刺激すると、この部材は拡張する。ドロー・ダウンポンプ56aの場合、ERM51又はERM53のいずれかの拡張によってシリンダ58aの軸に沿ってピストン68aを動かす。いずれかの方向にピストン68aが動くことによって、ピストン68aが向かってくる方のシリンダ部分内の流体圧力が増加し、当該部分に存在するあらゆる流体を、対応する流体導出ライン64aを通して流体貯蔵タンクに送り込む。さらに、シリンダ58aの他の部分においては、流体圧力が減少し、その結果、地層6から遺留流体を抽出して、サンプリングポート14に入れ、そしてシリンダ58aの当該部分に導く。ピストン68aがその行程の終端部に達すると、拡張しているERM(51又は53)を刺激している電力が断たれ、次いで、他方のERM(51又は53)に電力が印加されて、シリンダ58aの一方の部分から流体を押し出すことと、他の部分へ流体を引き入れるということとを同時に行う工程を繰り返す。したがって、電気的刺激をERM51とERM53とに同時に与えてはならず、別々の工程で与える必要がある。このように、本発明を使用することにより、遺留流体の試料を加圧下で対象となる地層6から抜き出して、後の分析に供するために貯蔵タンクに貯蔵することができる。遺留流体を加圧状態に維持することは、試料を沸点圧よりも高い圧力に保つことであり、これによって、全ての成分が試料中に存在する状態を保つことができる。
【0033】
図6に示されているドロー・ダウンポンプ78の態様は、ピストン80、シリンダ82、ピストン棒86、分節ERM88、アンカーロッド92、基盤94、拡張動ピンチブレーキ100、圧縮動ピンチブレーキ102、及び任意のダッシュポット98を有している。基盤94は、該基盤94の本体から垂直に延びる複数の脚95を更に有している。脚95は、第一の開口部97と第二の開口部99とを有しており、該開口部に前記2つのピンチブレーキ(100、102)がそれぞれ配置される。シリンダ82は細長く、略円筒形のシリンダ収容体84内に作られる。シリンダ82の内径は、ピストン80をその内側軸方向に収容し、ピストン80の軸方向の往復動を可能にするようになっている。ピストン80は、シリンダ80の内径に合致する大きさ及び形状の、円形の外周面を有する円盤状の形状を有している。ピストン80の外周面に沿って圧力シールを形成するために、ピストン80の外周面のサイズとシリンダ82の内周面のサイズとは十分に近いのが好ましい。圧力シールを施すために、シール部材(図示せず)をピストン80の外周面に配置してもよい。
【0034】
ピストン80の後方側にはピストン棒86が取り付けられており、該ピストン棒はシリンダ収容体84の後方面に開設された孔85を通じてシリンダのシリンダ収容体84の外側に延びている。ピストン棒86の他端はERM88の前方側に接続されている。シリンダ82内であって孔85に近接する位置において、孔85から流体が流れ出るのを防ぐために、ピストン棒86の周囲に環状シール部材96を配設することができる。
【0035】
ピストン棒86は、拡張動ピンチブレーキ100を介してシリンダ収容体84とERM88との間に設けられる。拡張動ピンチブレーキ100は、脚95の1つを貫通して形成される第一の開口部97内に取り付けられる。第一の開口部97の内径はピストン棒86の外径よりも大きく、したがって、その中にピンチブレーキ100を取り付ける空間を有している。図示されているように、ピンチブレーキ100は、ピストン棒86の長さ方向の一部分に外接する、環状に成形された単一の要素である。しかしながら、ピンチブレーキ100は、ピストン棒86と第一の開口部97の周面との間の空間に放射状に配設された1以上の要素からなっていてもよい。
【0036】
ピンチブレーキ100を選択的に作動させると、ブレーキ100はピストン棒86に十分な力でぶつかってピストン棒86を効果的に脚95に固定し、脚95に対するピストン棒86の動きを妨げる。ブレーキに適した材料の例としては、膨張可能な包材、拡張する膜、及び圧電材料や電場応答性高分子などの電気的に応答する材料を挙げることができる。
【0037】
アンカーロッド92の一端はERM88の後方側に接続されており、任意に設けられるダッシュポット98内にある他端より手前の位置で圧縮動ピンチブレーキ102を通過している。任意であるが、アンカーロッド92の他端は、ダッシュポット98の壁面を貫通して形成される孔93を通ってダッシュポット98内に挿入される。ダッシュポット98は、本発明を制限しない例として挙げることのできるシリコーンオイル、ブライン、又は地層流体などの圧縮性流体を含んでいるのがよい。ダッシュポット98内に流体を保持するために、孔93の近傍にシール部材96が設けられる。
【0038】
分節ERM88は、圧電材料、電場応答性重合体、又は外部からの電気刺激に反応する他のあらゆる物質等の電気的に反応する材料を有していると好ましい。図6に示される態様の分節ERM88は、要素90が接続された物として示されており、各要素は実質的に同じサイズである。しかしながら、分節ERM88は、電気的に応答する材料の分節のない単一の部材で作られていてもよい。さらに、接続されている要素90の各々が様々なサイズであってもよい。また、個々の要素90の具体的な材料は異なっていてもよく、例えば、複数の要素90の内1以上のものが圧電材料で作られており、残りの要素90が電場応答性重合体で作られていてもよい。
【0039】
運転に際して、図6に示されている態様のドロー・ダウンポンプ78は、先に記載したドロー・ダウンポンプ(56、56a)と類似の方法で動作する。即ち、ドロー・ダウンポンプ78は、送水管15を介してサンプリングプローブ14と流体流通状態にある。遺留流体は、シリンダ82と地層6との間の圧力差によってシリンダ82に吸い込まれる。この圧力差は、ピストン80をシリンダ収容体84内部で軸方向後方に動かして、シリンダ内の圧力を低くすることによって作られる。ピストン80は、拡張動ピンチブレーキ100及び圧縮動ピンチブレーキ102と組み合わせて、分節ERM88を選択的に作動させることによって、動かされる。例えば、圧縮動ピンチブレーキ102を同時に解放しながら分節ERM88を刺激することによって、ERM88は外部から与えられた電気的刺激に応答して拡張する。分節ERM88が拡張することによって、アンカーロッド92は、圧縮動ピンチブレーキ102を通って分節ERM88から離れる方向にスライドする。分節ERM88の拡張動が完了すると、圧縮動ピンチブレーキ102が作動されてアンカーロッド92をその内側に挟み込む。拡張動ピンチブレーキ100を解放状態にしつつ、分節ERM88より外部からの刺激を取り除く。分節ERM88から電気的な刺激を除去することによって、分節ERM88は通常の大きさ、又は張力の作用しない状態に収縮する。拡張動ピンチブレーキ100の解放と共にERM88が収縮することにより、ピストン棒86は分節ERM88の方向に動き、これによってピストン80がシリンダ82内を後方に動く。
【0040】
解放/作動段階の各一連の手続の間に動くピストンの距離は、外部から与えられる刺激の量及びタイプと共に分節ERM88の電気的に反応する材料の量とタイプに依存する。先に記載した解放/作動段階と刺激段階との連続的な繰り返しによって、シャクトリムシ状にピストンを動かし、これによって、引き続いて行われる分析のためにドロー・ダウンポンプ78がシリンダ82内に適量の遺留流体を吸い込むことができる。サンプリングする流体の典型量は、約30 ccから900 cc超の範囲であり、約56 cc程度であることが多い。しかしながら、サンプリングされた流体の実際の量は、流体を採取する地層に依存し、シリンダ82の容積はサンプルとして取得される量の流体を収容できるようにしておくのがよい。
【0041】
電気的に応答する部材が非常に優れた応答性を有しているので、ピストン80の動きと速度とは、シリンダ82内の圧力が遺留流体の沸点圧よりも確実に高い状態にあるように、厳密に制御することができる。したがって、ここに開示されているドロー・ダウンポンプによって得ることのできる数多くの利点の内の1つは、ピストン80の調節された不連続な動きは、現在使用されている典型的なドロー・ダウンポンプモータの加速/減速によって生じるような大きな動力を発生しない、ということである。さらに、電気的に応答する部材の高度な応答性によって、ここに開示されているドロー・ダウンポンプの動作サイクルの速度は、操業レベルで受容可能な限界内に十分に入っている。
【0042】
シリンダ82内の圧力は、取り付けられている圧力モニタ装置83でモニタすることができる。圧力モニタ装置83が実装されていることにより、シリンダ82内の圧力がサンプリングされてそこに入っている流体の沸点圧よりも高い状態を確実に保つように、ドロー・ダウンポンプ78の作動を制御することもできる。ドロー・ダウンの操作は、一定の圧力下か、一定の体積流量下で行うことができる。圧力モニタ装置83で測定された圧力は、フィードバックループ87を介してポンプ制御部79に伝えられる。圧力モニタ装置83は圧力計であればよく、現在知られている、又は後に開発される圧力モニタ手段内で圧力を検出することができればよい。例えば、圧力モニタ装置83は、圧力を気圧としてモニタすることもできるし、機械的エネルギーを電気的エネルギーに変換する、石英要素又は圧電部品などの変換器によってモニタすることもできる。圧力は、デジタル又はアナログ形式で測定されて得られる。
【0043】
従来技術で知られているように、ポンプ制御部79は、シリンダ82内の圧力の測定値を分析して遺留流体の沸点圧と比較するようにプログラムされている、コンピュータやマイクロプロセッサなどのようなプログラム可能な回路を有して作ることができる。これら2つの圧力が共に予め定められた圧力範囲内にあれば、圧力制御部79は、シリンダ82内の流体の圧力がその沸点圧よりも確実に大きい状態にあるように、ドロー・ダウンポンプ78の運転を調節するようにプログラムすることができる。データ・コマンドはデジタル形式であるのが好ましく、制御ループ81を介してドロー・ダウンポンプ78の動作部品77に転送される。動作部品77には、図6において破線で囲まれる部品と、破線内にあるこれらの部品に与えられる電気信号を供給して制御するのに使用される部品を含む。当業者であれば、シリンダ内の圧力が保たれるべき圧力よりも高い適切な圧力範囲を定めることができる。また、測定された圧力と沸点圧とを比較し、測定された圧力が特定の範囲内に入るときにはポンプ制御を変更するための制御システムをプログラムするのも、当業者の能力の範囲内にあることである。
【0044】
さらに、分節ERM88の電気応答材料を使用することによって得られる更なる利点は、ドロー・ダウンポンプ78の不連続なシャクトリムシ状の動きが、ピストン80の連続的な又はアナログ的な動きに類似しており、現在使用されているドロー・ダウンポンプに見られるダイナミックポンプ効果を最小化、又は除去することができることである。シリンダ82から流体を出したいときには、前記解放/作動手続を逆に行って、ピストン80をシリンダ82内押し込んでシリンダ導出口(図示せず)から流体を押し出して、貯蔵及び/又は流体分析に供する。
【0045】
圧縮性流体がその内部に入っている任意のダッシュポット98を有していると、アンカーロッド92の動きに抵抗力を与えてピストン80に関して圧力補償を行うことができる。圧縮性流体の内部で生成された抵抗力は、2つのピンチブレーキ(100、102)によって与えられる力が限られており、ピストン80に加えられる流体の力に対してピストンの棒86を支持するのに十分な狭持力が得られない可能性があるような場合に有用である。また、任意にではあるが、アンカーロッド92の、接続されていない方の端部には、ダッシュポット98によって与えられる抵抗力を増加するためにピストン(図示せず)を取り付けることもできる。さらに、抵抗力は圧縮性流体中に貯えられ、流体をサンプリングするための動きが終了した後にピストン80をシリンダ82中に押し戻す並進力に移し込むことができる。圧縮性流体の代替物としては、バネ、又は運動エネルギーを位置エネルギーに変換して一時的にその内部に保存しておくことのできる他の弾力性のある装置若しくは材料等を挙げることができる。
【0046】
したがって、ここまで記述してきた本発明は、発明の目的を実施し、必然的に達成される他の効果等と共に記載した結果と効果を達成するのに非常に適している。発明の現時点での好ましい態様が、開示という目的で記載されてきたが、所望の結果を達成するためには手続の詳細に数多くの変更を加えることができる。例えば、電気的に反応する部材は、流体に圧を加えるのに使用することができ、生成した流体圧力をここに開示されているドロー・ダウンポンプを運転するのに用いることができる。さらに、ここに開示されているポンプ装置の態様は、例えば、流体密度や流体粘度などの流体の物性を測定するのに使用することもできる。流体粘度の測定に関してはポアズイユの法則を用いることができ、一方、流体粘度は、ある長さの管内に所定の量の流体を流して、その管を流れる間に生じた圧力損失を測定することにより求めることができる。粘度を測定する他の方法としては、流体が入っているシリンダを回転し、流体内に発生した対応するトルクを測定する方法を挙げることができる。シリンダの回転は、回転式圧電モータを追加することによって行うことができる。当業者であれば、これらの変更又は他の類似の変更を容易に理解することができ、このような変更はここに開示されている本発明の精神及び添付の請求項の範囲内に包含されるものとする。
【図面の簡単な説明】
【0047】
【図1】坑井内に配置されたサンプリングゾンデの部分切取側面図である。
【図2】従来技術によるドロー・ダウンポンプを示している。
【図3】3A〜3Dは電気的に反応する部材の斜視図である。
【図4】本願明細書における開示に従ったドロー・ダウンポンプの一態様の切取図である。
【図5】本願明細書における開示に従ったドロー・ダウンポンプの一態様を示している。
【図6】本願明細書における開示に従ったドロー・ダウンポンプの一態様の部分切取図である。
【技術分野】
【0001】
本発明は、広く、炭化水素製造の分野に関する。より詳しくは、本発明は、炭化水素を産する地層の遺留液体をサンプルリングする装置に関する。
【背景技術】
【0002】
地下の地層に含まれている遺留液体のサンプルリングによって、炭化水素を産する可能性という点から関心の対象となり得る地層領域を試験する方法が提供される。この方法は、試験されている地層への損害を最小限に抑えつつ、実験室環境での後の分析に提供されるあらゆる地層流体のサンプルを回収する方法を含む。地層サンプルは、地下にある地層の生産可能性の実質的に点試験となる。加えて、試験中の制御と発生事項の順番との連続的な記録は地上においてなされる。この記録から、流体の圧縮性、密度、及び相対粘度を決定するデータと共に、地層の圧力及び浸透性についての貴重なデータを、油層分析用に得ることができる。
【0003】
一般に、遺留流体サンプリングは、ワイヤライン8を介して坑井5内にゾンデ10を配置することを含む。ゾンデ10の外側部分には、通常、試料ポート14と押し付け手段12とが対向して配置されている。試料ポート14が対象となる地層6の近傍にあるときには、押し付け手段12を坑井5の内表面に向かって延ばし、これによって試料ポート14を地層6に挿入する。試料ポート14の挿入によって、該試料ポートは坑井5の外周面を突き抜けて、地層6中の遺留流体と試料ポート14との間の流体連絡を可能にする。以下により詳細に記載されるように、試料ポート14を地層6中に押し込んだ後に、そこに配置されたポンプ手段によって遺留流体をゾンデ10中に吸い込むことができる。
【0004】
米国特許第2,674,313号に記載されているもののような、初期の地層流体サンプリング機器は、坑井内への一度の挿入で1回の試験しかできなかったので、市場提供品として完全に成功したものではなかった。後の機器は複数回の試験に適してはいたが、これらの試験器の成功は試験対象の地層の性質にある程度依存していた。例えば、地層が固くない場合は、固い地層の場合とは異なるサンプリング装置が必要とされた。
【0005】
坑井内複数回試験機器は、坑井の壁を突き抜けて対象となる地層から流体試料を抜き出すと共に該地層内の流体圧力を測定する、拡張可能なサンプリングプローブによって展開されてきた。昔から、これらの坑井内機器は、地層から機器へと遺留流体を引き抜くために水圧又は電気によって往復動をする内部ドロー・ダウンピストンを有している。
【0006】
一般に、坑井内複数回試験サンプリング装置は、細かい砂、岩、泥壁等のサンプリングプローブが遭遇する様々な異物と共に地層から抽出される遺留流体が、比較的容積の小さいチャンバに導入されることを必要とし、器具が閉止されると遺留流体を坑井中に排出する、サンプルシステム用の流体回路を組み入れている。このような装置の例は、米国特許第4,416,152号に見出すことができる。閉止の前に、試料は、平行ではあるが別の回路を通って試料タンクに流れ込む。他の方法によると、試料は同じ流体流路を通して収集される。
【0007】
遺留流体をサンプリングするのに使用される流路の他の例が図2に示されている。ここで、遺留流体は試料ポート14とサンプリング流路22とを介してポンプ20によって地層6から誘導される。ポンプ20内でのピストン19の往復動によって圧力差が生じ、この圧力差によって遺留流体をポンプ20内に引き込む。ポンプ20の作動手段は圧力源26によって作られ、圧力流体流路24によってポンプ20に伝えられる。逆止弁28が圧力流体流路24内に計画的に配置され、サンプリング流路22はこれらの流路内で流体の流れを管理する。この流路についてはマイケルズ等(Michaels et al.)に与えられた米国特許第5,303,775号により詳細に記述されている。
【0008】
泥水濾物は、掘削工程中に地層中に押し入れられる。遺留流体の真に汚染されていない試料が集められる前に、この泥水濾物は地層から水洗除去されなければならない。この濾物が試料ポート14の内部に引っ掛かって、遺留流体がサンプリング装置に流れるのを妨げることがよくある。従来技術によるサンプリング装置は、濾物を集める第一試料タンクと遺留流体を集める第二試料タンクとを有している。この方法に係る問題は、除去される濾物の量がわかっていないことである。この理由で、汚染されていない遺留流体が識別されて分別されるまで、地層からの濾物で汚染されている地層流体をポンプで吸い上げるのが望ましい。従来の坑井内試験機器は、無制限の流体吸引能力を有しておらず、それ故に、サンプリングに先立って、汚染物質である泥水濾物の完全な水洗除去を保証することができない。
【0009】
地層の浸透性は、定法によって、1基以上のドロー・ダウンピストンで生成される圧力変化から評価される。この分析においては、ポンプによる吸引の間に流れる流体の粘度がわかっている必要がある。該流体の粘度は、その粘度がわかっている流体を機器から地層中に注入し、その粘度を回収された地層流体の粘度と比較することによって求めることができる。このようにして測定された浸透性は、オフサイトにある油井の地層と信頼性の高い比較を行うことができ、流体の回収を最適化することができる。
【0010】
穴が開口していると地層流体の性質が急速に変わることがあるので、可能な限り素早く地層流体を除去するのが重要である。しかしながら、分離が生じてしまった流体を計測しても代表的な試料にはならないので、流体圧力がその流体の「沸点圧」より低くなるのを防ぐために、地層流体の流量を制御することが重要である。溶解成分が遊離して出てきてしまえば、該成分は通常再結合することができず、流体の性質が変化した、代表的ではない試料となってしまう。
【0011】
最近開発された油層試験装置は、試料収集時に遺留流体の沸点圧を測定することができる。この装置は、液体中の気泡を検出するのに光透過性を利用する公知の技術を用いている。しかしながら、粒子状の物が流体中にある場合にはこの方法には問題があり、誤った結果が出てしまうことがある。他の方法の中には、体積がわかっている地層流体を採取し、一定の温度でその体積を徐々に増加して行くという方法がある。被測定物の体積及び圧力の変化から圧力対体積の曲線が得られ、沸点圧の値を見出すことができる。この値は、圧力と体積との関係を示すグラフがもはや直線ではない領域にある曲線内で予想される。
【0012】
残念ながら、現在使用されている、このようなサンプリング装置を備えたポンプ装置は、固有の問題を抱えている。例えば、現在使用されているポンプシステムの電気又は流体圧作動手段の制御は正確ではなく、ポンプのスピードを完全に制御することができない。ポンプのスピードを完全に制御することができないということは、遺留流体の圧力がその沸点圧よりも低くなった場合にポンプによる吸引操作を停止する能力を阻害し、また、沸点圧を正確に測定する能力を抑制することになる。その理由は、その沸点圧よりも低い圧力で遺留流体をサンプリングすることは、サンプリングデータの結果の正確性に悪い影響を与えるからである。
【0013】
【特許文献1】米国特許第2,674,313号
【特許文献2】米国特許第4,416,152号
【特許文献3】米国特許第5,303,775号
【発明の開示】
【発明が解決しようとする課題】
【0014】
したがって、その状態を変えることなく遺留流体試料を得て、公知の圧力で分析することのできる、遺留流体をサンプリングする手段への需要がある。
【課題を解決するための手段】
【0015】
ここに開示する装置は、ピストン、該ピストンを受容するシリンダ、及び前記ピストンに操作可能に連結された駆動装置を有する地層流体試験ドロー・ダウンポンプを含む。該駆動装置は、電気的刺激に応答する部材で作られている。電気的刺激に応答する部材は、圧電構造体、又は電場応答性高分子であってもよい。任意に、前記圧電構造体は単一の圧電セグメントでできているものであってもよいし、少なくとも二種の異なる圧電セグメントでできているものであってもよい。ドロー・ダウンポンプの駆動装置は、任意に、圧電モータであってもよく、該圧電モータは、リニア圧電モータ及びロータリー圧電モータよりなる群から選択される。ドロー・ダウンポンプの操作連結器は、前記駆動装置と前記ピストンとの間に配置される直接機械式取り付け具、及び圧力流体流路で形成することができる。
【0016】
地層試験ドロー・ダウンポンプは、フィードバックループとポンプ制御部とを有していてもよく、該フィードバックループは、該ポンプ制御部と協働する圧力モニタ装置を有している。この圧力モニタ装置は、前記シリンダ内の流体圧力を示すデータを与え、シリンダ内の流体圧力を示す該データに応答して、シリンダ内の流体圧力がその沸点圧より確実に大きくなるように、前記ドロー・ダウンポンプの運転を制御する。
【0017】
地下にある地層内から遺留流体をサンプリングする方法がこの明細書には開示されており、該方法は、地下にある地層の近傍の坑井内にドロー・ダウンポンプを挿入し、該ドロー・ダウンポンプと前記地下にある地層との間に流体連絡通路を設け、前記ドロー・ダウンポンプを駆動装置で動作させることを含む。本発明による方法の駆動装置は、ドロー・ダウンポンプを運転するように連結されており、電気的刺激に反応する部材を有している。この方法では、さらに、前記駆動装置に電気エネルギーを供給する。本発明の方法における前記部材は、単一のセグメント又は少なくとも二種の異なるセグメントを有してなる圧電構造体を有していてもよい。本方法の圧電構造体は、圧電モータを有していてもよく、該圧電モータは、リニア圧電モータ及びロータリー圧電モータを含む群より選択される。任意に、本発明の方法の電気的刺激に応答する部材は、電場応答性高分子を有していてもよい。
【0018】
本発明の運転連結部は、駆動装置とピストンとの間に設けられる直接機械式取り付け具を有していてもよく、また、圧力流体流路を有していてもよい。この方法は、さらに、シリンダ内の圧力をモニタする。本発明の方法は、さらにまた、モニタされたシリンダ内の圧力に基づいてドロー・ダウンポンプの運転状態を制御し、それによってシリンダ内の圧力がサンプリングされた流体の沸点圧よりも確実に高く保たれるようにすることを含む。ドロー・ダウンポンプは、一定の圧力下で、又は一定の体積流量下で動作させるのがよい。
【発明を実施するための最良の形態】
【0019】
添付の図面を参照すると、本発明によるドロー・ダウンポンプ56の一態様が図4の切取図に示されている。この態様において、ドロー・ダウンポンプ56は、その一端にシリンダ58を有すると共に他端に空洞部66を有するシリンダ収容体57を備えている。このシリンダ58は実質的に円筒形であり、その内部にピストン68を受容する。円板のような形状を有するピストン68は、同様に、実質的に円形であると共にシリンダ58内を軸方向に往復動するように形成された外周面を有している。空洞部66は実質的に円筒形であるとして図示されているが、他の形状を有していてもよく、また、その長さ方向に沿って断面積が変化してもよい。後でより詳細に記載するが、空洞部66は電気的に反応する部材を収容するように形成されるのがよい。
【0020】
ピストン68の最も外側の周面には、シール部材69を配することもできる。シール部材69は、ピストン68の外周面全体に亘って圧力シールを与えることのできる、ポリマーなどの可撓性のある柔軟な材料で形成されるのがよい。この圧力シールによって、ピストン面71の側にあるシリンダ58内の圧力がピストン棒70の側のシリンダの圧力から分離される。
【0021】
図4のドロー・ダウンポンプ56は、ポンプのシリンダ収容体57に形成される導入ポート61にその端部の一方が接続されている流体導入ライン60をさらに有している。導入ポート61はシリンダ収容体57の外側を横断・貫通してシリンダ58の内部に入るので、流体導入ライン60はシリンダ58と流体流通状態にある。流体導入ライン60の他端は、サンプリングプローブ14と流体流通状態にある。流体導入ライン60に導入部逆止弁62が含まれている。流体は、導入部逆止弁62を通って導入ポート61の方にのみ流れ、逆止弁62を通って逆止弁62からサンプリングプローブ14の方に流れることはない。
【0022】
ドロー・ダウンポンプ56のこの態様は、導出ポート65にその一端が接続されると共に他端が流体貯蔵タンク(図示せず)と流体流通状態にある流体導出ライン64をさらに有している。流体導出ライン64には導出部逆止弁63が設けられており、逆止弁の向きは、ドロー・ダウンポンプ56から流体貯蔵タンクに流体は流れることができるが、流体貯蔵タンクからドロー・ダウンポンプ56へとは流れないようになっている。導入ポート61と同様に、導出ポート65はシリンダ収容体57の外面を突き抜けて形成されており、流体導出ライン64とシリンダ58との間の流体流通を可能にしている。
【0023】
図3A〜3Dには、電気的に応答する部材(ERM)が斜視図で示されている。電気的に応答する部材は電気エネルギーを機械的エネルギーに変換し、電気的な刺激に会うと、拡張又は収縮することができる。電気的に応答する部材としては、圧電構造体、電場応答性高分子、人工筋肉等を挙げることができる。
【0024】
圧電材料に電位差が与えられると、圧電材料は拡張する張力を受ける。電位差がなくなると、張力がなくなり、圧電材料は収縮する。本発明の態様において使用可能であると見込まれる圧電材料の本発明を制限しない例には、セラミックス、石英、多結晶圧電セラミックス、ベルリン石(AlPO4)及び正リン酸ガリウム(GaPO4)等の石英類似結晶、ペロブスカイト又はタングステンブロンズ構造を有するセラミックス(BaTiO3, KnbO3, LiNbO3, LiTaO3, BiFeO3, NaxWO3, Ba2NaNb5O5, Pb2KNb5O15)等が含まれる。
【0025】
適切な電場応答性高分子としては、静電気力に反応して変形するか、又はその変形が電場を変化させる、実質的に絶縁性であるポリマー又はゴム(又は両者の組み合わせ)であれば、いかなるものであってもよい。より具体的に、好適な材料としては、シリコーンエラストマー、VHB 4910 アクリルエラストマーなどのアクリルエラストマー、ポリウレタン、熱可塑性エラストマー、PVDFを有する共重合体、圧感接着剤、フルオロエラストマー、シリコーン分子部分とアクリル分子部分とを有する重合体などを挙げることができる。前記シリコーン分子部分とアクリル分子部分とを有する重合体としては、シリコーン分子部分とアクリル分子部分とを有する共重合体、及びシリコーンエラストマーとアクリルエラストマーとを有するポリマーブレンドを例示することができる。
【0026】
図3A〜3D及び図4に示されている態様の電気的に反応する部材に関しては、該電気的に反応する部材は電気刺激を印加すると拡張する。この拡張は、図3Aと図3Bとを比較することによって示されている。張力が生じていない、又は応答していない状態にある長さL1のERM50の例が図3Aに示されている。電気的に応答する部材の拡張性を図解するために、図3Bは、この部材が与えられた電気的刺激にどのように応答するかを説明するERM 50aを示している。図3Bにおいて、ERM 50aは、図3AのERM50の長さを超えて拡張しており、その長さはL1からL1+ΔL1へと増加している(ここにおいて、L1+ΔL1はL1より大きい。)。この増加分は、電気的刺激を受けていない部材の大きさと部材に与えられた電流又は電圧の量との関数である。本発明の所望の手段と結果とを達成するために、部材の大きさと与えられる電力とを適切に決定するのは、当業者の能力の範囲内に十分あることであると考えられる。
【0027】
また、図3Cと図3Dとを参照すると、電気的に応答する部材は、軸方向に少なくとも2種のセグメントを連続的に接続してなる分節ERM52であってもよい。図3Cは、張力が発生していない状態にある分節ERM52の斜視図を示している。分節ERM52に電気エネルギーが印加されると、分節ERM52は拡張分節ERM 52a(図3D)へと拡張し、その長さがL2からL2+ΔL2になる(ここにおいて、L2+ΔL2はL2より大きい。)。分節されている態様を採用することにより、ERMの拡張を弾力的により大きく制御することができるという利点がある。ここで、選択的に電気エネルギーを与えることにより単一のセグメント54を拡張させることもできるし、また、複数のセグメント54を連続的に拡張させて、分節ERM52の拡張の進み方に影響を与えることもできる。直線的な拡張が図3A〜図3Dに図解されているが、ERM(50, 52)は半径方向にも拡張することができることを指摘しておく。
【0028】
運転の際には、対象となる地層6内にある遺留流体がサンプリングプローブ14の中に入り、流体導入ライン60中を移動して導入ポート61に入ってシリンダ58を満たす。一般に、シリンダ58が遺留流体で満たされているときは、ピストン58は下り行程にあり、空洞部66に向かって移動している。ピストン68は、流体の存在によって生じるピストン68の両側での圧力差によって、また、シリンダ58内に配置されてピストンを後方へ駆動するバネ(図示せず)によってこのように動かすことができる。
【0029】
所望量の流体がシリンダ58を満たすと、空洞部66内に配置されているERM50に電気的な刺激が印加される。ERM50の代わりに分節ERM52も使用することができるし、また、これらの様々な態様を同時に使用することもできることを指摘しておくべきであろう。先に議論したように、電気的な刺激はERM50を拡張させる。この拡張が、ピストン棒70を押して、空洞部66から押し出す。ピストン棒70が空洞部66から出て行くにつれ(上り行程)、ピストン68がシリンダ58内を移動し、シリンダ内の流体に原動力を与える。この原動力は流体を加圧し、これによって流体をシリンダ58から導出ポート65を経て流体導出ライン64を通って流体貯蔵タンクへと動かす。よく知られているように、導入部逆止弁及び導出部逆止弁(62, 63)を計画的に配置して、その導通方向を定めることにより、下り行程中に地層6からシリンダ58へと流体を流し、上り行程中にシリンダ58から流体貯蔵タンクへと流体を流すことができる。
【0030】
図4に破線で示されているように、任意に、導入ポート61aで遺留流体導入ライン60aをシリンダ収容体57に接続することができる。この態様においては、シリンダ収容体57のERMを有する空洞部66の近傍の領域において、導入ポート61aを遺留流体ポンプ56に設けている。この態様においては、ERM50の拡張によってピストン68をシリンダ58に押し付けることによって、ピストン68の後ろ側の圧力を低減し、このようにして地層6からの流体を導入する。さらに、導入ポート61aのように、この態様の導出ポート65aがERMを有する空洞部66の近傍に同様に配置される。このようにして、ERM50の拡張中にシリンダ58内に導入された流体がピストン68の下り行程でシリンダ58から押し出される。
【0031】
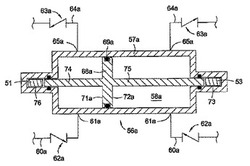
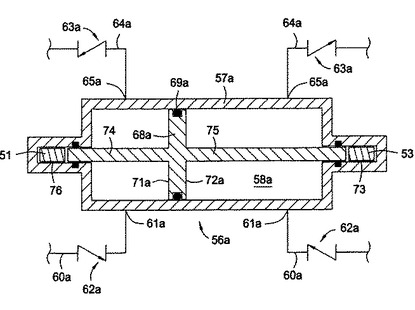
ドロー・ダウンポンプ56の図5に示されている態様は、その中に軸方向にピストン68aを収容するように形成された実質的に円筒状のシリンダ58aを有する、長いシリンダ収容体57aを備えている。図4に示される態様のピストン68のように、ピストン69aは、シリンダ58a内を軸方向に移動するのに適した円盤状の形態を有している。しかしながら、この態様において該ピストンに接続されている2本のピストン棒(74, 75)は、それぞれ、第1及び第2のピストン面(71a, 72a)から延びている。これらピストン棒(74, 75)は、シリンダ58aの対向する端部に設けられた対応する前方空洞部と後方空洞部(76, 73)内に入るように延在している。さらに、この態様においては、ピストン68aの両側に設けられた2つの導入ポート61aを介して、2本の流体導入ライン60aがシリンダ58aに接続されている。同様に、2本の流体導出ラインが、ピストン68aのやはり両側に位置する導出ポート65aを介してシリンダ58aに接続されている。2本の導入ライン60aは、そのもう一方の端部でサンプリングプローブと流体流通状態にあり、遺留流体がこれらのラインを通ってシリンダ58aへと流れることができる。図5に示された態様の場合のように、この態様においても、2本の流体導出ライン64aの他端は流体貯蔵タンクに接続されている。導入ライン60aには導入部逆止弁62aが含まれており、これら導入部逆止弁によって、流体の流れがシリンダ58aへと流れる方向のみに制限される。導出ライン64aにも導出部逆止弁63aが設けられており、これによって流体はシリンダから流体貯蔵タンクへと流れることはできるが、反対方向へ流れることはできない。各空洞部(76, 73)内には所定量のERM50が含まれている。
【0032】
図5に示されている態様の運転において、前方空洞部76内にあるERM51と後方空洞部73内にあるERM53とのいずれか一方を刺激することによって、ピストン68aは軸方向に動かされる。先に記述したように、電気的に応答する部材を刺激すると、この部材は拡張する。ドロー・ダウンポンプ56aの場合、ERM51又はERM53のいずれかの拡張によってシリンダ58aの軸に沿ってピストン68aを動かす。いずれかの方向にピストン68aが動くことによって、ピストン68aが向かってくる方のシリンダ部分内の流体圧力が増加し、当該部分に存在するあらゆる流体を、対応する流体導出ライン64aを通して流体貯蔵タンクに送り込む。さらに、シリンダ58aの他の部分においては、流体圧力が減少し、その結果、地層6から遺留流体を抽出して、サンプリングポート14に入れ、そしてシリンダ58aの当該部分に導く。ピストン68aがその行程の終端部に達すると、拡張しているERM(51又は53)を刺激している電力が断たれ、次いで、他方のERM(51又は53)に電力が印加されて、シリンダ58aの一方の部分から流体を押し出すことと、他の部分へ流体を引き入れるということとを同時に行う工程を繰り返す。したがって、電気的刺激をERM51とERM53とに同時に与えてはならず、別々の工程で与える必要がある。このように、本発明を使用することにより、遺留流体の試料を加圧下で対象となる地層6から抜き出して、後の分析に供するために貯蔵タンクに貯蔵することができる。遺留流体を加圧状態に維持することは、試料を沸点圧よりも高い圧力に保つことであり、これによって、全ての成分が試料中に存在する状態を保つことができる。
【0033】
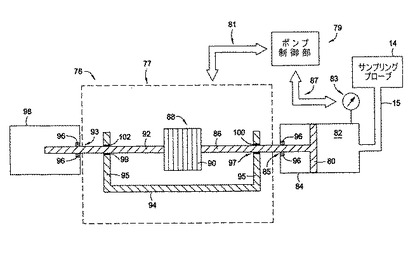
図6に示されているドロー・ダウンポンプ78の態様は、ピストン80、シリンダ82、ピストン棒86、分節ERM88、アンカーロッド92、基盤94、拡張動ピンチブレーキ100、圧縮動ピンチブレーキ102、及び任意のダッシュポット98を有している。基盤94は、該基盤94の本体から垂直に延びる複数の脚95を更に有している。脚95は、第一の開口部97と第二の開口部99とを有しており、該開口部に前記2つのピンチブレーキ(100、102)がそれぞれ配置される。シリンダ82は細長く、略円筒形のシリンダ収容体84内に作られる。シリンダ82の内径は、ピストン80をその内側軸方向に収容し、ピストン80の軸方向の往復動を可能にするようになっている。ピストン80は、シリンダ80の内径に合致する大きさ及び形状の、円形の外周面を有する円盤状の形状を有している。ピストン80の外周面に沿って圧力シールを形成するために、ピストン80の外周面のサイズとシリンダ82の内周面のサイズとは十分に近いのが好ましい。圧力シールを施すために、シール部材(図示せず)をピストン80の外周面に配置してもよい。
【0034】
ピストン80の後方側にはピストン棒86が取り付けられており、該ピストン棒はシリンダ収容体84の後方面に開設された孔85を通じてシリンダのシリンダ収容体84の外側に延びている。ピストン棒86の他端はERM88の前方側に接続されている。シリンダ82内であって孔85に近接する位置において、孔85から流体が流れ出るのを防ぐために、ピストン棒86の周囲に環状シール部材96を配設することができる。
【0035】
ピストン棒86は、拡張動ピンチブレーキ100を介してシリンダ収容体84とERM88との間に設けられる。拡張動ピンチブレーキ100は、脚95の1つを貫通して形成される第一の開口部97内に取り付けられる。第一の開口部97の内径はピストン棒86の外径よりも大きく、したがって、その中にピンチブレーキ100を取り付ける空間を有している。図示されているように、ピンチブレーキ100は、ピストン棒86の長さ方向の一部分に外接する、環状に成形された単一の要素である。しかしながら、ピンチブレーキ100は、ピストン棒86と第一の開口部97の周面との間の空間に放射状に配設された1以上の要素からなっていてもよい。
【0036】
ピンチブレーキ100を選択的に作動させると、ブレーキ100はピストン棒86に十分な力でぶつかってピストン棒86を効果的に脚95に固定し、脚95に対するピストン棒86の動きを妨げる。ブレーキに適した材料の例としては、膨張可能な包材、拡張する膜、及び圧電材料や電場応答性高分子などの電気的に応答する材料を挙げることができる。
【0037】
アンカーロッド92の一端はERM88の後方側に接続されており、任意に設けられるダッシュポット98内にある他端より手前の位置で圧縮動ピンチブレーキ102を通過している。任意であるが、アンカーロッド92の他端は、ダッシュポット98の壁面を貫通して形成される孔93を通ってダッシュポット98内に挿入される。ダッシュポット98は、本発明を制限しない例として挙げることのできるシリコーンオイル、ブライン、又は地層流体などの圧縮性流体を含んでいるのがよい。ダッシュポット98内に流体を保持するために、孔93の近傍にシール部材96が設けられる。
【0038】
分節ERM88は、圧電材料、電場応答性重合体、又は外部からの電気刺激に反応する他のあらゆる物質等の電気的に反応する材料を有していると好ましい。図6に示される態様の分節ERM88は、要素90が接続された物として示されており、各要素は実質的に同じサイズである。しかしながら、分節ERM88は、電気的に応答する材料の分節のない単一の部材で作られていてもよい。さらに、接続されている要素90の各々が様々なサイズであってもよい。また、個々の要素90の具体的な材料は異なっていてもよく、例えば、複数の要素90の内1以上のものが圧電材料で作られており、残りの要素90が電場応答性重合体で作られていてもよい。
【0039】
運転に際して、図6に示されている態様のドロー・ダウンポンプ78は、先に記載したドロー・ダウンポンプ(56、56a)と類似の方法で動作する。即ち、ドロー・ダウンポンプ78は、送水管15を介してサンプリングプローブ14と流体流通状態にある。遺留流体は、シリンダ82と地層6との間の圧力差によってシリンダ82に吸い込まれる。この圧力差は、ピストン80をシリンダ収容体84内部で軸方向後方に動かして、シリンダ内の圧力を低くすることによって作られる。ピストン80は、拡張動ピンチブレーキ100及び圧縮動ピンチブレーキ102と組み合わせて、分節ERM88を選択的に作動させることによって、動かされる。例えば、圧縮動ピンチブレーキ102を同時に解放しながら分節ERM88を刺激することによって、ERM88は外部から与えられた電気的刺激に応答して拡張する。分節ERM88が拡張することによって、アンカーロッド92は、圧縮動ピンチブレーキ102を通って分節ERM88から離れる方向にスライドする。分節ERM88の拡張動が完了すると、圧縮動ピンチブレーキ102が作動されてアンカーロッド92をその内側に挟み込む。拡張動ピンチブレーキ100を解放状態にしつつ、分節ERM88より外部からの刺激を取り除く。分節ERM88から電気的な刺激を除去することによって、分節ERM88は通常の大きさ、又は張力の作用しない状態に収縮する。拡張動ピンチブレーキ100の解放と共にERM88が収縮することにより、ピストン棒86は分節ERM88の方向に動き、これによってピストン80がシリンダ82内を後方に動く。
【0040】
解放/作動段階の各一連の手続の間に動くピストンの距離は、外部から与えられる刺激の量及びタイプと共に分節ERM88の電気的に反応する材料の量とタイプに依存する。先に記載した解放/作動段階と刺激段階との連続的な繰り返しによって、シャクトリムシ状にピストンを動かし、これによって、引き続いて行われる分析のためにドロー・ダウンポンプ78がシリンダ82内に適量の遺留流体を吸い込むことができる。サンプリングする流体の典型量は、約30 ccから900 cc超の範囲であり、約56 cc程度であることが多い。しかしながら、サンプリングされた流体の実際の量は、流体を採取する地層に依存し、シリンダ82の容積はサンプルとして取得される量の流体を収容できるようにしておくのがよい。
【0041】
電気的に応答する部材が非常に優れた応答性を有しているので、ピストン80の動きと速度とは、シリンダ82内の圧力が遺留流体の沸点圧よりも確実に高い状態にあるように、厳密に制御することができる。したがって、ここに開示されているドロー・ダウンポンプによって得ることのできる数多くの利点の内の1つは、ピストン80の調節された不連続な動きは、現在使用されている典型的なドロー・ダウンポンプモータの加速/減速によって生じるような大きな動力を発生しない、ということである。さらに、電気的に応答する部材の高度な応答性によって、ここに開示されているドロー・ダウンポンプの動作サイクルの速度は、操業レベルで受容可能な限界内に十分に入っている。
【0042】
シリンダ82内の圧力は、取り付けられている圧力モニタ装置83でモニタすることができる。圧力モニタ装置83が実装されていることにより、シリンダ82内の圧力がサンプリングされてそこに入っている流体の沸点圧よりも高い状態を確実に保つように、ドロー・ダウンポンプ78の作動を制御することもできる。ドロー・ダウンの操作は、一定の圧力下か、一定の体積流量下で行うことができる。圧力モニタ装置83で測定された圧力は、フィードバックループ87を介してポンプ制御部79に伝えられる。圧力モニタ装置83は圧力計であればよく、現在知られている、又は後に開発される圧力モニタ手段内で圧力を検出することができればよい。例えば、圧力モニタ装置83は、圧力を気圧としてモニタすることもできるし、機械的エネルギーを電気的エネルギーに変換する、石英要素又は圧電部品などの変換器によってモニタすることもできる。圧力は、デジタル又はアナログ形式で測定されて得られる。
【0043】
従来技術で知られているように、ポンプ制御部79は、シリンダ82内の圧力の測定値を分析して遺留流体の沸点圧と比較するようにプログラムされている、コンピュータやマイクロプロセッサなどのようなプログラム可能な回路を有して作ることができる。これら2つの圧力が共に予め定められた圧力範囲内にあれば、圧力制御部79は、シリンダ82内の流体の圧力がその沸点圧よりも確実に大きい状態にあるように、ドロー・ダウンポンプ78の運転を調節するようにプログラムすることができる。データ・コマンドはデジタル形式であるのが好ましく、制御ループ81を介してドロー・ダウンポンプ78の動作部品77に転送される。動作部品77には、図6において破線で囲まれる部品と、破線内にあるこれらの部品に与えられる電気信号を供給して制御するのに使用される部品を含む。当業者であれば、シリンダ内の圧力が保たれるべき圧力よりも高い適切な圧力範囲を定めることができる。また、測定された圧力と沸点圧とを比較し、測定された圧力が特定の範囲内に入るときにはポンプ制御を変更するための制御システムをプログラムするのも、当業者の能力の範囲内にあることである。
【0044】
さらに、分節ERM88の電気応答材料を使用することによって得られる更なる利点は、ドロー・ダウンポンプ78の不連続なシャクトリムシ状の動きが、ピストン80の連続的な又はアナログ的な動きに類似しており、現在使用されているドロー・ダウンポンプに見られるダイナミックポンプ効果を最小化、又は除去することができることである。シリンダ82から流体を出したいときには、前記解放/作動手続を逆に行って、ピストン80をシリンダ82内押し込んでシリンダ導出口(図示せず)から流体を押し出して、貯蔵及び/又は流体分析に供する。
【0045】
圧縮性流体がその内部に入っている任意のダッシュポット98を有していると、アンカーロッド92の動きに抵抗力を与えてピストン80に関して圧力補償を行うことができる。圧縮性流体の内部で生成された抵抗力は、2つのピンチブレーキ(100、102)によって与えられる力が限られており、ピストン80に加えられる流体の力に対してピストンの棒86を支持するのに十分な狭持力が得られない可能性があるような場合に有用である。また、任意にではあるが、アンカーロッド92の、接続されていない方の端部には、ダッシュポット98によって与えられる抵抗力を増加するためにピストン(図示せず)を取り付けることもできる。さらに、抵抗力は圧縮性流体中に貯えられ、流体をサンプリングするための動きが終了した後にピストン80をシリンダ82中に押し戻す並進力に移し込むことができる。圧縮性流体の代替物としては、バネ、又は運動エネルギーを位置エネルギーに変換して一時的にその内部に保存しておくことのできる他の弾力性のある装置若しくは材料等を挙げることができる。
【0046】
したがって、ここまで記述してきた本発明は、発明の目的を実施し、必然的に達成される他の効果等と共に記載した結果と効果を達成するのに非常に適している。発明の現時点での好ましい態様が、開示という目的で記載されてきたが、所望の結果を達成するためには手続の詳細に数多くの変更を加えることができる。例えば、電気的に反応する部材は、流体に圧を加えるのに使用することができ、生成した流体圧力をここに開示されているドロー・ダウンポンプを運転するのに用いることができる。さらに、ここに開示されているポンプ装置の態様は、例えば、流体密度や流体粘度などの流体の物性を測定するのに使用することもできる。流体粘度の測定に関してはポアズイユの法則を用いることができ、一方、流体粘度は、ある長さの管内に所定の量の流体を流して、その管を流れる間に生じた圧力損失を測定することにより求めることができる。粘度を測定する他の方法としては、流体が入っているシリンダを回転し、流体内に発生した対応するトルクを測定する方法を挙げることができる。シリンダの回転は、回転式圧電モータを追加することによって行うことができる。当業者であれば、これらの変更又は他の類似の変更を容易に理解することができ、このような変更はここに開示されている本発明の精神及び添付の請求項の範囲内に包含されるものとする。
【図面の簡単な説明】
【0047】
【図1】坑井内に配置されたサンプリングゾンデの部分切取側面図である。
【図2】従来技術によるドロー・ダウンポンプを示している。
【図3】3A〜3Dは電気的に反応する部材の斜視図である。
【図4】本願明細書における開示に従ったドロー・ダウンポンプの一態様の切取図である。
【図5】本願明細書における開示に従ったドロー・ダウンポンプの一態様を示している。
【図6】本願明細書における開示に従ったドロー・ダウンポンプの一態様の部分切取図である。
【特許請求の範囲】
【請求項1】
ピストン、
その内部に該ピストンを収容するように形成されたシリンダ、及び
前記ピストンに動力を伝えるように連結された駆動装置
を有し、該駆動装置が電気的刺激に応答する部材を有してなることを特徴とする、地層流体検査用ドロー・ダウンポンプ。
【請求項2】
前記部材が圧電構造体を有してなること特徴とする、請求項1に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項3】
さらに圧電モータを有することを特徴とする、請求項2に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項4】
前記圧電モータが、リニア圧電モータ及びロータリ圧電モータよりなる群から選択されることを特徴とする、請求項3に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項5】
前記部材が電場応答性高分子を有してなることを特徴とする、請求項1に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項6】
前記動力を伝える連結が、前記駆動装置と前記ピストンとの間の直接機械式取り付け具であることを特徴とする、請求項1に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項7】
前記動力を伝える連結が圧力流体回路であることを特徴とする、請求項1に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項8】
前記圧電構造体が少なくとも2つの別個の圧電セグメントを有していることを特徴とする、請求項3に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項9】
フィードバックループとポンプ制御部とをさらに有しており、該フィードバックループが該ポンプ制御部と協働する圧力モニタ装置を含んでいることを特徴とする、請求項1に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項10】
前記圧力モニタ装置は前記シリンダ内の流体圧力を示すデータを提供し、前記ポンプ制御部がプログラム可能であって、前記シリンダ内の流体圧力を示すデータに応答して前記流体圧力が該流体の沸点圧よりも確実に大きい範囲内にあるように、前記ドロー・ダウンポンプの運転を制御することを特徴とする、請求項9に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項11】
地層に近接する坑井内にドロー・ダウンポンプを挿入し、
該ドロー・ダウンポンプと該地層との間に流体連絡通路を形成し、
前記ドロー・ダウンポンプを駆動装置で運転し、
該駆動装置が動力を伝えるように前記ドロー・ダウンポンプに連結され、該駆動装置が電気的刺激に応答する部材を有してなることを特徴とする、地層内から遺留流体をサンプリングする方法。
【請求項12】
前記駆動装置に電気エネルギーを供給することを更に含む、請求項11に記載の方法。
【請求項13】
前記部材が圧電構造体を有してなること特徴とする、請求項11に記載の方法。
【請求項14】
前記圧電構造体が圧電モータを有することを特徴とする、請求項13に記載の方法。
【請求項15】
前記圧電モータが、リニア圧電モータ及びロータリ圧電モータよりなる群から選択されることを特徴とする、請求項14に記載の方法。
【請求項16】
前記部材が電場応答性高分子を有してなることを特徴とする、請求項11に記載の方法。
【請求項17】
前記動力を伝える連結が、前記駆動装置と前記ピストンとの間の直接機械式取り付け具であることを特徴とする、請求項11に記載の方法。
【請求項18】
前記動力を伝える連結が圧力流体回路であることを特徴とする、請求項11に記載の方法。
【請求項19】
前記圧電構造体が少なくとも2つの別個の圧電セグメントを有していることを特徴とする、請求項13に記載の方法。
【請求項20】
前記シリンダ内の圧力をモニタすることを更に含む、請求項13に記載の方法。
【請求項21】
モニタされたシリンダ内の圧力に基づいて、シリンダ内の圧力がサンプリングされた流体の沸点圧よりも大きい範囲内に確実にあるように、ドロー・ダウンポンプを制御運転することを更に含む、請求項20に記載の方法。
【請求項22】
前記ドロー・ダウンポンプの運転モードが、一定の圧力下での運転及び一定の体積流量下での運転よりなる群から選択されることを特徴とする、請求項11に記載の方法。
【請求項1】
ピストン、
その内部に該ピストンを収容するように形成されたシリンダ、及び
前記ピストンに動力を伝えるように連結された駆動装置
を有し、該駆動装置が電気的刺激に応答する部材を有してなることを特徴とする、地層流体検査用ドロー・ダウンポンプ。
【請求項2】
前記部材が圧電構造体を有してなること特徴とする、請求項1に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項3】
さらに圧電モータを有することを特徴とする、請求項2に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項4】
前記圧電モータが、リニア圧電モータ及びロータリ圧電モータよりなる群から選択されることを特徴とする、請求項3に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項5】
前記部材が電場応答性高分子を有してなることを特徴とする、請求項1に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項6】
前記動力を伝える連結が、前記駆動装置と前記ピストンとの間の直接機械式取り付け具であることを特徴とする、請求項1に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項7】
前記動力を伝える連結が圧力流体回路であることを特徴とする、請求項1に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項8】
前記圧電構造体が少なくとも2つの別個の圧電セグメントを有していることを特徴とする、請求項3に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項9】
フィードバックループとポンプ制御部とをさらに有しており、該フィードバックループが該ポンプ制御部と協働する圧力モニタ装置を含んでいることを特徴とする、請求項1に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項10】
前記圧力モニタ装置は前記シリンダ内の流体圧力を示すデータを提供し、前記ポンプ制御部がプログラム可能であって、前記シリンダ内の流体圧力を示すデータに応答して前記流体圧力が該流体の沸点圧よりも確実に大きい範囲内にあるように、前記ドロー・ダウンポンプの運転を制御することを特徴とする、請求項9に記載の地層流体検査用ドロー・ダウンポンプ。
【請求項11】
地層に近接する坑井内にドロー・ダウンポンプを挿入し、
該ドロー・ダウンポンプと該地層との間に流体連絡通路を形成し、
前記ドロー・ダウンポンプを駆動装置で運転し、
該駆動装置が動力を伝えるように前記ドロー・ダウンポンプに連結され、該駆動装置が電気的刺激に応答する部材を有してなることを特徴とする、地層内から遺留流体をサンプリングする方法。
【請求項12】
前記駆動装置に電気エネルギーを供給することを更に含む、請求項11に記載の方法。
【請求項13】
前記部材が圧電構造体を有してなること特徴とする、請求項11に記載の方法。
【請求項14】
前記圧電構造体が圧電モータを有することを特徴とする、請求項13に記載の方法。
【請求項15】
前記圧電モータが、リニア圧電モータ及びロータリ圧電モータよりなる群から選択されることを特徴とする、請求項14に記載の方法。
【請求項16】
前記部材が電場応答性高分子を有してなることを特徴とする、請求項11に記載の方法。
【請求項17】
前記動力を伝える連結が、前記駆動装置と前記ピストンとの間の直接機械式取り付け具であることを特徴とする、請求項11に記載の方法。
【請求項18】
前記動力を伝える連結が圧力流体回路であることを特徴とする、請求項11に記載の方法。
【請求項19】
前記圧電構造体が少なくとも2つの別個の圧電セグメントを有していることを特徴とする、請求項13に記載の方法。
【請求項20】
前記シリンダ内の圧力をモニタすることを更に含む、請求項13に記載の方法。
【請求項21】
モニタされたシリンダ内の圧力に基づいて、シリンダ内の圧力がサンプリングされた流体の沸点圧よりも大きい範囲内に確実にあるように、ドロー・ダウンポンプを制御運転することを更に含む、請求項20に記載の方法。
【請求項22】
前記ドロー・ダウンポンプの運転モードが、一定の圧力下での運転及び一定の体積流量下での運転よりなる群から選択されることを特徴とする、請求項11に記載の方法。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2008−537577(P2008−537577A)
【公表日】平成20年9月18日(2008.9.18)
【国際特許分類】
【出願番号】特願2008−500765(P2008−500765)
【出願日】平成18年3月2日(2006.3.2)
【国際出願番号】PCT/US2006/007425
【国際公開番号】WO2006/096452
【国際公開日】平成18年9月14日(2006.9.14)
【出願人】(301008534)ベイカー ヒューズ インコーポレイテッド (21)
【Fターム(参考)】
【公表日】平成20年9月18日(2008.9.18)
【国際特許分類】
【出願日】平成18年3月2日(2006.3.2)
【国際出願番号】PCT/US2006/007425
【国際公開番号】WO2006/096452
【国際公開日】平成18年9月14日(2006.9.14)
【出願人】(301008534)ベイカー ヒューズ インコーポレイテッド (21)
【Fターム(参考)】
[ Back to top ]