
圧電式バルブの組立方法及び圧電式バルブ、並びに該圧電式バルブを利用した噴風手段を備える光学式粒状物選別機
【課題】閉弁時にエア漏れを起こす虞がない圧電式バルブの組立方法を提供する。
【解決手段】外部から供給される圧縮気体を受け入れる気体圧力室、該気体圧力室から前記圧縮気体を排出する気体排出路及び弁座が形成される気体排出部、を有するバルブ本体20と、前記気体排出路を開閉する弁体31、前記弁体の動作に必要な駆動力を変位として発生する圧電素子32、前記圧電素子の変位を拡大して前記弁体に作用させる一対の変位拡大機構、を有するアクチュエータ30と、を備えてなる圧電式バルブ10の組立方法であって、前記圧電素子に所定の電圧を印加して前記弁体を開弁方向へ動作させる工程と、前記開弁方向へ動作させた弁体を前記弁座24の弁座面に当接させる工程と、前記アクチュエータを前記バルブ本体に対し固定する工程と、前記圧電素子に印加した所定の電圧を解除する工程と、を含むことを特徴とする。
【解決手段】外部から供給される圧縮気体を受け入れる気体圧力室、該気体圧力室から前記圧縮気体を排出する気体排出路及び弁座が形成される気体排出部、を有するバルブ本体20と、前記気体排出路を開閉する弁体31、前記弁体の動作に必要な駆動力を変位として発生する圧電素子32、前記圧電素子の変位を拡大して前記弁体に作用させる一対の変位拡大機構、を有するアクチュエータ30と、を備えてなる圧電式バルブ10の組立方法であって、前記圧電素子に所定の電圧を印加して前記弁体を開弁方向へ動作させる工程と、前記開弁方向へ動作させた弁体を前記弁座24の弁座面に当接させる工程と、前記アクチュエータを前記バルブ本体に対し固定する工程と、前記圧電素子に印加した所定の電圧を解除する工程と、を含むことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、圧電素子の変位を利用してバルブの開閉を行う圧電式バルブの組立方法及び該組立方法により組み立てられる圧電式バルブ、並びに該圧電式バルブを利用した噴風手段を備える光学式粒状物選別機に関する。
【背景技術】
【0002】
従来、穀粒や樹脂ペレット等の粒状物を噴風により吹き飛ばして良品と不良品に選別したり、粒状物に混入する異物等を噴風により除去したりする光学式粒状物選別機が知られている。
この種の粒状物選別機は、搬送路の端部から所定の軌跡に沿って落下する粒状物を、不良品等の検出信号に基づいて噴風により吹き飛ばし除去することで、該粒状物の選別を行うものである。
【0003】
上記粒状物選別機は、連続的かつ大量に落下する粒状物の中から不良品等をエアの噴風により吹き飛ばすものであり、当該不良品等のみを他の粒状物を巻き込むことなく精度よく吹き飛ばすためには噴風ノズルに応答性のよいバルブを備えることが必要となる。
そこで、先に、圧電素子を利用することでバルブの開閉を高速で行える圧電式エアバルブが提案されている(特許文献1参照。)。
【0004】
特許文献1に記載された圧電式エアバルブは、高速応答性能に優れる圧電素子の特性を利用するものであり、圧電素子の小さな変位をテコの原理に基づき拡大する変位拡大機構を備えるものである。
【0005】
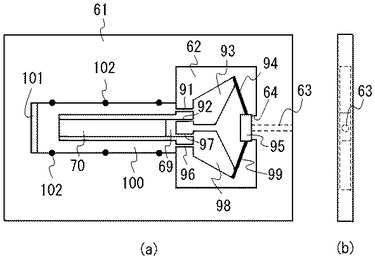
図19は、特許文献1に記載された圧電式エアバルブの概略図を示す。
図19に示す圧電式エアバルブは、圧電素子70の長手方向軸線と弁体95とを結ぶ直線を中心に、図面上、上下対称に二つの変位拡大機構が設けられたものである。
【0006】
上側変位拡大機構は、第1ヒンジ91、第2ヒンジ92、第1アーム部材93及び第1板ばね94で構成される。前記第1ヒンジ91の一端はベース基板100に接合される。前記第2ヒンジ92の一端はキャップ部材69に接合される。前記第1ヒンジ91及び第2ヒンジ92の各他端は、前記第1アーム部材93の基部に接合される。前記第1アーム部材93は、基部から前記圧電素子70の長手方向軸線と弁体95とを結ぶ直線に対して外方(図面上、斜め上方)に向かって延びており、そのほぼ先端部分には、後述する第2ばね99と協働して前記弁体95を弁座64に確実に押し当てる、適度な弾性、柔軟性、可撓性とを具えた前記第1板ばね94の一端が接合される。前記第1板ばね94の他端は前記弁体95の一方側の側端部に接合される。
【0007】
下側変位拡大機構は、第3ヒンジ96、第4ヒンジ97、第2アーム部材98及び第2板ばね99で構成される。前記第3ヒンジ96の一端は前記ベース基板100に接合される。前記第4ヒンジ97の一端は前記キャップ部材69に接合される。前記第3ヒンジ96及び第4ヒンジ97の各他端は、前記第2アーム部材98の基部に接合される。前記第2アーム部材98は、基部から前記圧電素子70の長手方向軸線と弁体95とを結ぶ直線に対して外方(図面上、斜め下方)に向かって延びており、そのほぼ先端部分に前記第2板ばね99の一端が接合される。前記第2板ばね99の他端は前記弁体95の他方側の側端部に接合される。
【0008】
上記圧電式エアバルブは、前記圧電素子70に電圧を印加すると、該圧電素子70の伸長方向への変位が前記一対の変位拡大機構を介して前記弁体95に伝わり、該弁体95を速やかに移動させて開弁する。
また、上記圧電式エアバルブは、前記圧電素子70への電圧印加を解除すると、当該圧電素子70の原状復帰に伴う復帰力が前記一対の変位拡大機構を介して前記弁体95に伝わり、該弁体95を速やかに前記弁座64に当接させて閉弁する。
【0009】
そして、上記圧電式エアバルブを備える光学式粒状物選別機は、上記圧電式エアバルブが従来の電磁バルブに比べてバルブ開閉時の応答性に優れることから、不良品等を精度よく吹き飛ばし、かつ前後の良品等を巻き込んで吹き飛ばすおそれの少ないものである。
【0010】
ところで、上記圧電式エアバルブは、前記圧電素子70、前記一対の変位拡大機構及び前記弁体95を前記ベース基板100に接合してユニット化することで、該圧電式エアバルブの組立作業や保守作業を容易とするものである。
【0011】
即ち、上記圧電式エアバルブは、エアバルブ本体61に予め設けられたユニット装着領域101に前記ユニット化された部材が組み込まれ、前記圧電素子70への通電が無い状態で、前記弁体95と前記エアバルブ本体61に設けられる前記弁座64との密着状態が適当となるように図面上左右方向が調節され、図面上右方向に適当な圧力が加えられた状態で、前記ユニット化された部材が適当な固定手段102により前記エアバルブ本体61に固定され組み立てられる。
【0012】
ところが、上記圧電式エアバルブは、前記一対の変位拡大機構の加工精度や前記各アーム部材93,98に対する前記各板バネ94,99の溶接等による取付精度、前記エアバルブ本体61に対する前記ユニット化された部材の組付精度等の製造上の問題により、前記弁体95が前記弁座64に対し平行にならなかったり、平行に動かなかったりする場合があり、閉弁時に前記弁体95と弁座64との間に隙間ができてエア漏れを起こす虞があった。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】特許第4344164号公報
【発明の概要】
【発明が解決しようとする課題】
【0014】
そこで、本発明は、閉弁時にエア漏れを起こす虞がない圧電式バルブの組立方法を提供することを目的とする。
また、本発明は、上記組立方法により組み立てられて、閉弁時にエア漏れを起こす虞がない圧電式バルブを提供することを目的とする。
さらに、本発明は、閉弁時にエア漏れを起こす虞がない上記圧電式バルブを利用した噴風手段を備える光学式粒状物選別機を提供することを目的とする。
【課題を解決するための手段】
【0015】
上記目的を達成するため、本発明は、外部から供給される圧縮気体を受け入れる気体圧力室、該気体圧力室から前記圧縮気体を排出する気体排出路及び該気体排出路の入り口側端部であって弁座が形成される気体排出部、を有するバルブ本体と、前記気体圧力室に配置され前記気体排出路を開閉する弁体、前記弁体の動作に必要な駆動力を変位として発生する圧電素子、前記弁体における動作方向の軸線に対して対称に設けられ、前記圧電素子の変位を拡大して前記弁体に作用させる一対の変位拡大機構、を有するアクチュエータと、を備えてなる圧電式バルブの組立方法であって、前記圧電素子に所定の電圧を印加して前記弁体を開弁方向へ動作させる工程と、前記開弁方向へ動作させた弁体を前記弁座の弁座面に当接させる工程と、前記アクチュエータを前記バルブ本体に対し直接又は間接に固定する工程と、前記圧電素子に印加した所定の電圧を解除する工程と、を含むことを特徴とするものである。
【0016】
本発明は、前記気体排出部が、前記バルブ本体に対し着脱可能とされるプレートに設けられており、前記開弁方向へ動作させた弁体を前記前記弁座の弁座面に当接させた後、前記アクチュエータを前記プレートに固定し、その後、前記プレートを前記バルブ本体に固定することが好ましい。
【0017】
本発明は、前記弁体における動作方向の軸線が、前記弁体と前記圧電素子の長手方向軸線とを結ぶ直線であることが好ましい。
【0018】
本発明は、外部から前記気体排出路に負圧を作用させ、前記気体排出路からのエア漏れがない状態を確認した後に、前記アクチュエータを前記バルブ本体又は前記プレートに固定することが好ましい。
【0019】
本発明は、外部から供給される圧縮気体を受け入れる気体圧力室、該気体圧力室から前記圧縮気体を排出する気体排出路及び該気体排出路の入り口側端部であって弁体が当接する弁座が形成される気体排出部、を有するバルブ本体と、前記気体圧力室に配置され前記気体排出路を開閉する弁体、前記弁体の動作に必要な駆動力を変位として発生する圧電素子、前記弁体における動作方向の軸線に対して対称に設けられ、前記圧電素子の変位を拡大して前記弁体に作用させる一対の変位拡大機構、を有するアクチュエータと、を備えてなる圧電式バルブであって、前記圧電式バルブの組立方法によって組み立てられ、前記圧電素子に印加した前記所定の電圧を解除することに伴う前記弁体の復帰力により、前記弁体が前記弁座面に押し付けられることを特徴とするものである。
【0020】
本発明は、前記弁体における動作方向の軸線が、前記弁体と前記圧電素子の長手方向軸線とを結ぶ直線であることが好ましい。
【0021】
本発明は、被選別物を移送する移送手段と、該移送手段の端部から落下する被選別物を検出位置において検出する光学検出手段と、該光学検出手段のさらに下方に設けられ当該光学検出手段による検出結果に基づいて前記被選別物をエアの噴風により吹き飛ばす噴風手段とを備えてなる光学式粒状物選別機であって、前記噴風手段は、前記圧電式バルブを備え、前記光学検出手段による検出結果に基づいて前記圧電式バルブを駆動しエアを噴風することを特徴とするものである。
【0022】
本発明は、前記噴風手段が、前記圧電式バルブを複数並設してなり、前記光学検出手段による検出結果に基づいて前記圧電式バルブを選択的に駆動しエアを噴風することが好ましい。
【発明の効果】
【0023】
本発明の圧電式バルブの組立方法によれば、圧電素子に印加した所定の電圧を解除することに伴う弁体の復帰力により、前記弁体が前記弁座の弁座面に押し付けられるので、前記開弁方向へ動作させた弁体を前記弁座の弁座面に当接させる際に、仮に両者の間に隙間が存在したとしても、閉弁時にエア漏れを起こす虞がない。
【0024】
本発明の圧電式バルブの組立方法は、前記気体排出部が、前記バルブ本体に対し着脱可能とされるプレートに設けられているものであれば、前記弁体を前記弁座面に当接させる際の組み付け作業が容易となり、圧電式バルブの組み立ての効率化を図ることができる。
【0025】
本発明の圧電式バルブの組み立て方法は、気体排出路からのエア漏れがない状態を確認した後に、前記アクチュエータを前記バルブ本体又は前記プレートに固定することとすれば、閉弁時におけるエア漏れを確実に防ぐことができる。
【0026】
本発明の圧電式バルブは、前記圧電素子に印加した前記所定の電圧を解除することに伴う前記弁体の復帰力により、前記弁体が前記弁座面に潰し代をもって押し付けられるので、閉弁時にエア漏れを起こす虞がない。
【0027】
本発明の光学式粒状物選別機は、前記噴風手段が、前記圧電式バルブを備え、前記光学検出手段による検出結果に基づいて前記圧電式バルブを駆動しエアを噴風することとすれば、前記圧電式バルブが閉弁時にエア漏れを起こす虞がないため選別精度が安定する。
また、本発明の光学式粒状物選別機は、前記噴風手段が、前記圧電式バルブを複数並設してなり、前記光学検出手段による検出結果に基づいて前記圧電式バルブを選択的に駆動しエアを噴風することとすれば、前記複数の圧電式バルブが開弁するタイミングをほぼ均一化することができるため選別精度が向上する。
【図面の簡単な説明】
【0028】
【図1】実施の形態1における圧電式バルブの概略斜視図。
【図2】図1に示す圧電式バルブの概略説明図。
【図3】図2に示すバルブ本体の概略説明図。
【図4】図2に示すアクチュエータの概略説明図。
【図5】図2に示す圧電式バルブの開弁動作の説明図。
【図6】実施の形態1における圧電式バルブの組立工程の説明図。
【図7】実施の形態1における圧電式バルブの組立工程の説明図。
【図8】実施の形態1における圧電式バルブの組立工程の説明図。
【図9】実施の形態1における圧電式バルブの組立工程の説明図。
【図10】実施の形態1における圧電式バルブの組立工程の説明図。
【図11】圧電式バルブを利用した噴風手段を備える光学式粒状物選別機の要部側面図。
【図12】図11に示す光学式粒状物選別機の制御ブロック図。
【図13】実施の形態2における圧電式バルブの概略斜視図。
【図14】図13に示す圧電式バルブの概略説明図。
【図15】図14に示すバルブ本体の概略説明図。
【図16】図14に示すプレートの概略説明図。
【図17】図14に示すアクチュエータの概略説明図。
【図18】図16に示すプレートと図17に示すアクチュエータを組み付けた状態の概略説明図。
【図19】特許文献1に記載された圧電式エアバルブの概略説明図。
【発明を実施するための形態】
【0029】
本発明の実施の形態を図面に基づいて説明する。
[実施の形態1]
【0030】
<圧電式バルブの構造>
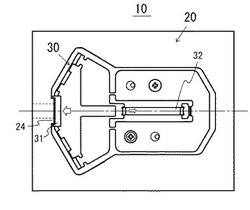
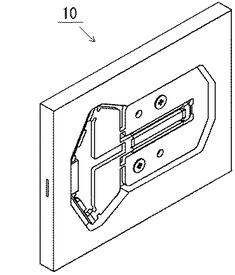
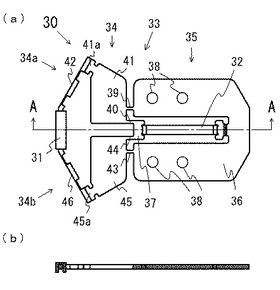
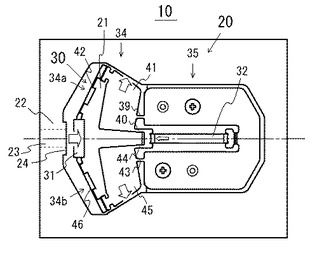
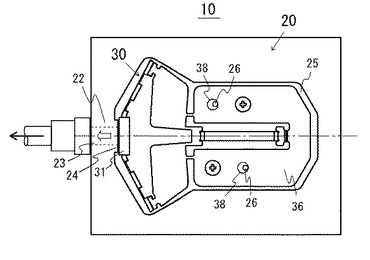
図1は、圧電式バルブの内部構造を示す概略斜視図である。
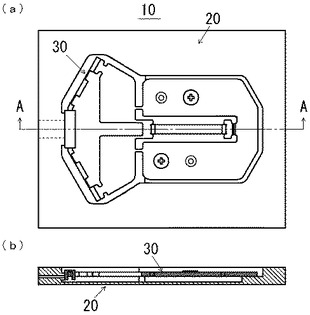
図2は、図1に示す圧電式バルブの概略説明図であって、(a)は閉弁時における右側面図、(b)は(a)のA−A断面図を示す。
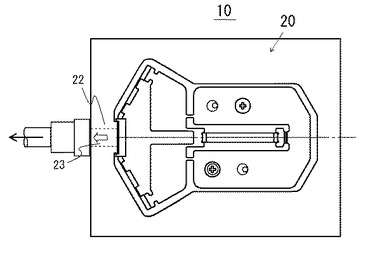
図2に示すように、本実施の形態において、圧電式バルブ10は、バルブ本体20と該バルブ本体20に取り付けられるアクチュエータ30を備える。
【0031】
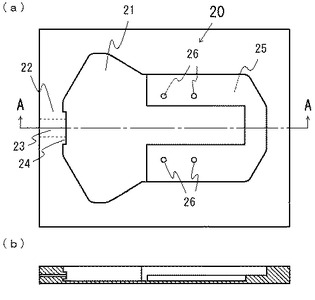
図3(a)は、図2に示すバルブ本体の右側面図、(b)は(a)のA−A断面図を示す。
前記バルブ本体20は、外部の圧縮気体供給源(図示せず)から圧縮気体の供給を受ける気体圧力室21と、該気体圧力室21内の圧縮気体を外部に噴出する気体排出部22、前記気体圧力室21から連続し、後述するアクチュエータ30のベース基板36を着脱可能に受け入れるベース基板装着部25を備える。
【0032】
前記気体排出部22には、気体排出路23及び該気体排出路23の入り口側端部であって後述するアクチュエータ30の弁体31が当接する弁座面を有する樹脂製の弁座24が設けられる。
また、前記ベース基板装着部25には、後述するアクチュエータ30のベース基板36を固定するための有底のネジ穴26が複数形成される。
該バルブ本体20は、例えば合成樹脂材料により一体に成形される。
【0033】
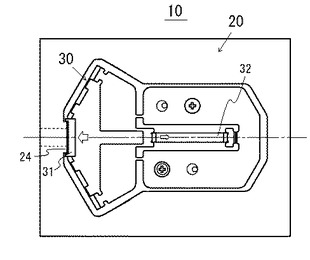
図4(a)は、図2に示すアクチュエータの右側面図、(b)は(a)のA−A断面図を示す。
前記アクチュエータ30は、ゴム製の弁体31、該弁体31の動作に必要な駆動力を変位として発生する圧電素子32、前記圧電素子32の変位を拡大して前記弁体31に作用させる変位拡大機構33を備える。
前記弁体31は、前記バルブ本体20の気体排出部22に設けられる弁座24に当接する。該弁体31の材料として滑性ゴムを用いれば、当該弁体31の耐久性が向上する。
【0034】
前記変位拡大機構33は、前記圧電素子32の変位を拡大する変位拡大部34と、前記圧電素子32の変位を前記変位拡大部34に伝達する変位伝達部35を有し、前記弁体31の動作方向の軸線、ここでは、前記弁体31と前記圧電素子32の長手方向軸線を結ぶ直線(以下、「中心線」という。)に対して対称に配置される。
【0035】
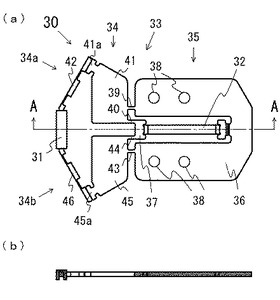
前記変位伝達部35は、前記圧電素子32の一端が接合されるU字状のベース基板36と、前記圧電素子32の他端が接合されるキャップ部材37を有する。前記圧電素子32が前記U字状のベース基板36の空間内に配設されることで、前記変位伝達部35は前記圧電素子32の長手方向軸線を中心として対称な配置とされる。
ここでは、前記圧電素子32は、前記U字状のベース基板36の空間内であって該ベース基板36のU字状底部と前記キャップ部材37との間に組み込まれ、前記ベース基板36のU字状底部を塑性変形させることで、前記一端が前記ベース基板36に接合され、前記他端が前記キャップ部材37に接合される。
【0036】
また、前記ベース基板36には、前記バルブ本体20のベース基板装着部25に形成される複数のネジ穴26に対応して複数の貫通孔38が形成される。前記貫通孔38は、前記バルブ本体20に形成される前記複数のネジ穴26にねじ込まれるネジの軸の外径よりも大きな開口を有する。そして、前記ベース基板36は、前記ネジの頭部により前記ベース基板装着部25に対し固定される。
【0037】
前記変位拡大部34は、第1変位拡大部34aと、該第1変位拡大部34aと前記中心線に対して対称な配置とされる第2変位拡大部34bから構成される。
前記第1変位拡大部34aは、第1ヒンジ39、第2ヒンジ40、第1アーム41及び第1板バネ42を有する。前記第1ヒンジ39の一端は前記U字状のベース基板36の一方側先端に対し一体とされ、前記第2ヒンジ40の一端は前記キャップ部材37に対し一体とされる。前記第1アーム41の外側先端部には、くびれ部を介して前記第1板バネ42の取り付け部41aが設けられる。該取り付け部41aには前記第1板バネ42の一端が接合され、該第1板バネ42の他端には前記弁体31の一方側の側端部が接合される。
【0038】
前記第2変位拡大部34bは、第3ヒンジ43、第4ヒンジ44、第2アーム45及び第2板バネ46を有する。前記第3ヒンジ43の一端は前記U字状のベース基板36の他方側先端に対し一体とされ、前記第4ヒンジ44の一端は前記キャップ部材37に対し一体とされる。前記第2アーム45の外側先端部には、くびれ部を介して前記第2板バネ46の取り付け部45aが設けられる。該取り付け部45aには前記第2板バネ46の一端が接合され、該第2板バネ46の他端には前記弁体31の他方側の側端部が接合される。
【0039】
ここで、前記変位伝達部35を構成するベース基板36及びキャップ部材37と、前記変位拡大部34を構成する第1乃至第4ヒンジ39,40,43,44及び第1及び第2アーム41,45とは、例えばステンレス材等の金属材料を打ち抜いて一体に成形することができる。
【0040】
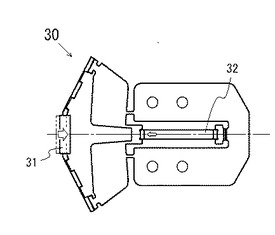
図5は、図2に示す圧電式バルブの開弁動作の説明図を示す。
上記圧電式バルブ10は、閉弁状態において前記圧電素子32に通電すると、当該圧電素子32が図面上左方向に伸長する。当該圧電素子32の伸長に伴う変位は、前記変位伝達部35を介して前記変位拡大部34に伝達され、前記第1変位拡大部34aにおいて、前記第1ヒンジ39を支点、前記第2ヒンジ40を力点、前記第1アーム41の外側先端部を作用点としてテコの原理により拡大され、前記第1アーム41の外側先端部を大きく変位させる。また、前記圧電素子32の伸長に伴う変位は、同様に、前記第2変位拡大部34bにおいて、前記第3ヒンジ43を支点、第4ヒンジ44を力点、第2アーム45の外側先端部を作用点として、前記第2アーム45の外側先端部を大きく変位させる。
【0041】
そして、前記第1アーム41の外側先端部と前記第2アーム45の外側先端部の各変位は、前記第1板バネ42及び第2板バネ46を介して前記弁体31を前記バルブ本体20の気体排出部22に設けられる前記弁座24から離間させる。これにより前記圧電式バルブ10が開弁し、前記バルブ本体20の気体圧力室21内の圧縮気体は前記気体排出部22に形成される気体排出路23から外部に噴出される。
【0042】
一方、上記圧電式バルブ10は、前記圧電素子32への通電が解除されると該圧電素子32が収縮し、当該収縮が前記変位伝達部35を介して前記第1及び第2変位拡大部34a,34bに伝達され、前記第1及び第2板バネ42,46を介して前記弁体31を前記弁座24に着座させ、前記気体排出路23を閉鎖する。
【0043】
<圧電式バルブの組立方法>
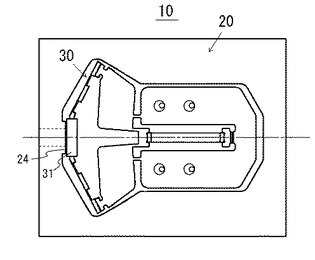
図6乃至10は、上記圧電式バルブ10の組立工程の説明図を示す。
(1)ステップ1
まず、図6に示すように、前記アクチュエータ30において、前記圧電素子32に所定の電圧を印加し、前記弁体31を開弁方向へ動作させる。ここでは、一例として、前記圧電素子32に10Vの電圧を印加して、前記弁体31を開弁方向へ20μm動作させる。
【0044】
(2)ステップ2
次に、図7に示すように、前記アクチュエータ30を前記バルブ本体20に装着し、該アクチュエータ30を図面上左方向に移動させて、前記開弁方向へ20μm動作させた前記弁体31を前記バルブ本体20に設けられる前記弁座24の弁座面に当接させる。
【0045】
(3)ステップ3
次に、図8に示すように、前記バルブ本体20の外部から前記気体排出路23に負圧を作用させて当該気体排出路23からのエア漏れの有無を確認し、該エア漏れがある場合には前記弁体31と前記弁座面との当接状態を調整した上で、前記アクチュエータ30を前記バルブ本体20に対し固定する。
このとき、前記アクチュエータ30は、前記ベース基板36に形成される複数の貫通孔38と、前記バルブ本体20のベース基板装着部25に形成される複数のネジ穴26を利用して、前記バルブ本体20に対しネジにより固定される。
ここで、前記アクチュエータ30と前記バルブ本体20との相対的な位置関係は、前記ステップ2の工程により変化するが、前記貫通孔38が前記ネジ穴26にねじ込まれるネジ軸の外径よりも大きな開口とされるため、当該位置関係の変化に対応することができる。
【0046】
(4)ステップ4
次に、図9に示すように、前記ステップ1の工程において前記圧線素子32に印加した10Vの電圧を解除し、前記開弁方向へ動作させた20μm分の原状復帰力を前記弁体31に対し作用させる。
このとき、前記ゴム製の弁体31は前記樹脂性の前記弁座24の弁座面に対し潰し代をもって押し付けられるため、前記ステップ2の工程において前記弁体31を前記弁座24の弁座面に当接させた際、仮に両者の間に隙間が存在したとしても、該隙間を確実に閉鎖することができる。
【0047】
(5)ステップ5
次に、図10に示すように、前記バルブ本体20の外部から前記気体排出路23に負圧を作用させて吸引することで、前記気体排出路23からのエア漏れが無いか検査する。
なお、前記ステップ3の工程において前記気体排出路23に負圧を作用させた状態を維持しつつ、前記ステップ4の工程における作業を行えば、当該ステップ5の工程における作業を前記ステップ4の工程における作業と同時に行うことができる。
【0048】
以上のとおり、上記圧電式バルブの組立方法によれば、圧電素子32に印加した所定の電圧を解除するのに伴う弁体31の復帰力により、前記弁体31が前記弁座24の弁座面に潰し代をもって押し付けられるので、当該組立方法により組み立てられた圧電式バルブは、閉弁時にエア漏れを起こす虞がない。
【0049】
なお、上記圧電式バルブ10において、前記アクチュエータ30は前記バルブ本体20に対しネジにより固定されることとしたが、他の方法により固定されることとしてもよい。
【0050】
また、上記圧電式バルブ10において、前記アクチュエータ30の弁体31を前記バルブ本体20の弁座24の弁座面に当接させる際に、前記アクチュエータ30を前記弁座面に対し直線的に移動させることができるガイド機構を、前記バルブ本体20とアクチュエータ30との間に設けておけば、前記バルブ本体20と前記アクチュエータ30との組み付け精度により前記弁体24と弁座面が平行にならない問題を防止できる。
【0051】
<光学式粒状物選別機>
次に、上記組立方法によって組み立てられる圧電式バルブを利用した噴風ノズルを備える光学式粒状物選別機について説明する。
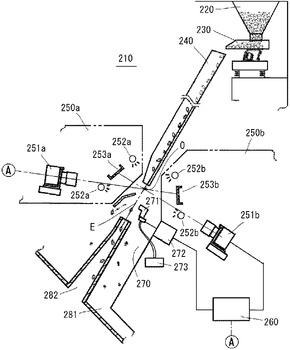
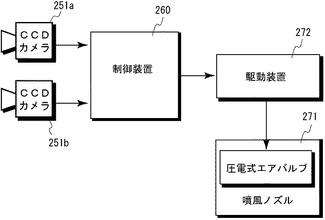
図11は、光学式粒状物選別機の内部構造を簡略化して示した要部側断面図を示す。図12は、光学式粒状物選別機における制御ブロック図を示す。
光学式粒状物選別機210は、上部にタンク220と振動フィーダ230とからなる粒状物供給部を有する。粒状物供給部の下方には所定幅を有する傾斜状シュート240が配置される。
前記粒状物供給部から供給された粒状物は、前記傾斜状シュート240上を幅方向に広がって連続状に自然流下した後、その下端から所定の落下軌跡に沿って空中に放出される。
【0052】
前記所定の落下軌跡の前後には、前記傾斜状シュート240の幅方向に平行に直線状に延びる粒状物検出位置Oにおいて粒状物を撮像する少なくとも一対の光学検出装置250a,250bが対向して配設される。各光学検出装置250a,250bは、それぞれCCDラインセンサを内蔵するCCDカメラ等の撮像手段251a,251b、蛍光灯等からなる照明手段252a,252b、及び前記粒状物を撮像する際の背景となるバックグラウンド253a,253b等から構成される。
【0053】
また、前記粒状物検出位置Oの下方には、不良品等をエアの噴風により除去する噴風装置270が配設される。前記噴風装置270は、上記組立方法により組み立てられた圧電式バルブ10を複数並設して組み込んだ噴風ノズル271と、該噴風ノズル271に圧縮空気を送る圧縮空気供給装置273を備え、前記各光学検出装置250a,250bの検出結果に基づいて、前記傾斜状シュート240の下端から放出される粒状物を、該粒状物の落下軌跡の幅方向各位置に対応して設けられる前記噴風ノズル271の複数のノズル孔からのエアの噴射により吹き飛ばす。なお、前記圧電式バルブ10の圧電素子32は、駆動装置272の駆動回路と電気的に接続される。
【0054】
上記光学式粒状物選別機210において、前記傾斜状シュート240を幅方向に広がって連続状に自然流下した後、その下端から所定の落下軌跡に沿って空中に放出される粒状物は、前記粒状物検出位置Oにおいて前記各光学検出装置250a,250bの撮像手段251a,251bにより撮像され、当該撮像データが制御装置260に送られる。該制御装置260は、前記撮像データに基づいて不良品等の除去すべき粒状物を特定するとともに当該粒状物の大きさ等に関する情報を取得し、前記不良品等の排除信号を前記駆動装置272に送る。
【0055】
前記噴風装置270は、前記駆動装置272に送られる前記排除信号に基づいて前記複数の圧電式バルブ10を選択的に駆動し、前記傾斜状シュート240の幅方向に平行に直線状に延びる粒状物排除位置Eを通過する不良品等に対し、該幅方向の各位置に対応して設けられる前記噴風ノズル271の各ノズル孔からエアを噴風する。
【0056】
そして、前記噴風ノズル271の各ノズル孔からの噴風により吹き飛ばされた不良品等は、不良品排出口281から機外に排出される。また、噴風により吹き飛ばされることなく所定の落下軌跡をそのまま通過した良品等は、良品排出口282から回収される。
【0057】
上記光学式粒状物選別機において、選別対象となる粒状物は、代表的には穀物粒、特に米粒であるが、必ずしも穀物粒に限られるわけではなく、その対象物は、噴風によって吹き飛ばすことが可能な大きさと質量である限り何でも構わない。
【0058】
以上のとおり、上記光学式粒状物選別機は、前記噴風ノズル271が上記組立方法によって組み立てられた圧電式バルブ10を備えるので、該圧電式バルブ10が閉弁時にエア漏れを起こす虞がなく選別精度が安定する。
【0059】
また、上記光学式粒状物選別機は、前記噴風ノズル271が、上記圧電式バルブ10を複数並設して組み込んでなるので、前記複数の圧電式バルブが開弁するタイミングをほぼ均一化することができるため選別精度が向上する。
【0060】
次に、本発明の他の実施の形態について説明する。
[実施の形態2]
【0061】
<圧電式バルブの構造>
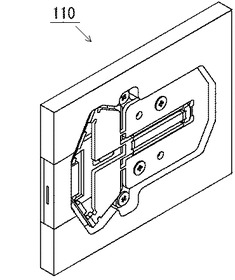
図13は、圧電式バルブの内部構造を示す概略斜視図である。
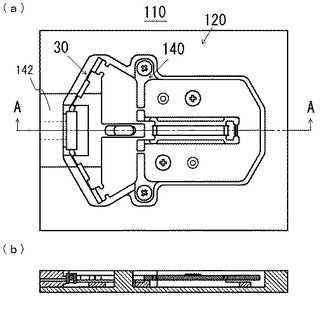
図14は、図13に示す圧電式バルブの概略説明図であって、(a)は閉弁時における右側面図、(b)は(a)のA−A断面図を示す。
図14に示すように、本実施の形態において、圧電式バルブ110は、バルブ本体120と、該バルブ本体120に取り付けられるプレート140と、該プレート140に取り付けられるアクチュエータ30を備える。
【0062】
前記圧電式バルブ110は、前記バルブ本体120に対し着脱可能とされる気体排出部142を有し、該気体排出部142が前記プレート140の先端部に設けられている点で、実施の形態1における圧電式バルブ10と構造的に異なる。
【0063】
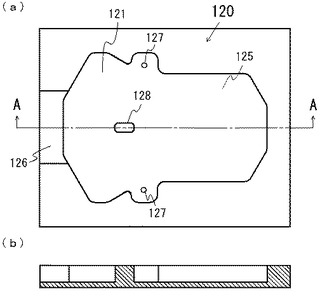
図15(a)は、図14に示すバルブ本体の右側面図、(b)は(a)のA−A断面図を示す。
前記バルブ本体120は、外部の圧縮気体供給源(図示せず)から圧縮気体の供給を受ける気体圧力室121と、後述するプレート140に設けられる気体排出部142を着脱可能に受け入れる気体排出部装着部126と、前記気体圧力室121から連続し、後述するプレート140に取り付けられる後述するアクチュエータ30のベース基板36を受け入れるベース基板装着部125を備える。
【0064】
また、前記バルブ本体120には、後述するプレート140を固定するための有底のネジ穴127が複数形成される。
さらに、該バルブ本体120には、後述するプレート140のガイド突起用開口147内に挿入されるガイド突起128が形成される。
該バルブ本体120は、例えば合成樹脂材料により一体に成形される。
【0065】
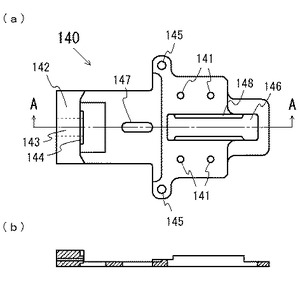
図16(a)は、図14に示すプレート140の右側面図、(b)は(a)のA−A断面図を示す。
前記プレート140は、その先端部に気体排出部142を備える。
当該気体排出部142には、気体排出路143及び該気体排出路143の入り口側端部であって後述するアクチュエータ30の弁体31が当接する弁座面を有する樹脂製の弁座144が設けられる。
該気体排出部142は、前記バルブ本体120に設けられる気体排出部装着部126に装着され、前記バルブ本体120の気体圧力室121内の圧縮気体を外部に噴出する。
【0066】
前記プレート140には、後述するアクチュエータ30の圧電素子32が位置する圧電素子用開口146、及び前記バルブ本体120のガイド突起128が挿入されるガイド突起用開口147が形成される。
また、前記圧電素子用開口146の両側部には、後述するアクチュエータ30の圧電素子32と該アクチュエータ30のU字状ベース基板36の内側面とを絶縁する絶縁壁148が形成される。
【0067】
前記プレート140には、前記バルブ本体120に形成される複数のネジ穴127に対応して複数の貫通孔145が形成される。前記貫通孔145は、前記バルブ本体120に形成される複数のネジ穴127にねじ込まれるネジ軸の外径よりも大きな開口を有する。そして、前記プレート140は、前記ネジの頭部により前記バルブ本体120に対し固定される。ここで、前記プレート140には、前記貫通孔145に代えてネジ穴を形成しても構わない。
また、前記プレート140には、後述するアクチュエータ30のベース基板36を固定するためのネジ穴141が複数形成される。
該プレート140は、例えば合成樹脂材料により一体に成形される。
【0068】
図17(a)は、図14に示すアクチュエータ30の右側面図、(b)は(a)のA−A断面図を示す。
当該アクチュエータ30は、図4に示す実施の形態1のアクチュエータ30と同じ構成であるため、ここでの説明は省略する。
【0069】
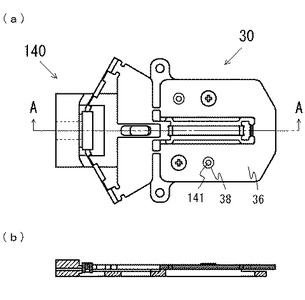
図18は、前記プレート140と前記アクチュエータ30を組み付けた状態の概略説明図であって、(a)は右側面図、(b)は(a)のA−A断面図を示す。
前記アクチュエータのベース基板36には、前記プレート140に形成される複数のネジ穴141に対応して複数の貫通孔38が形成されている。前記貫通孔38は、前記プレート140に形成される複数のネジ穴141にねじ込まれるネジ軸の外径よりも大きな開口を有する。そして、前記ベース基板36は、前記ネジの頭部により前記プレート140に対し固定される。
【0070】
上記圧電式バルブ110は、図18に示す前記アクチュエータ30を組み付けた状態のプレート140が、前記バルブ本体120に対し固定されてなる。このとき、前記プレート140の先端部に設けられる気体排出部142が、前記バルブ本体120の気体排出部装着部126に装着されている。
前記気体排出部装着部126には、前記気体排出部142との間から圧縮気体が漏れることのないよう、適宜シール部材が配置される。
【0071】
<圧電式バルブの組立方法>
上記圧電式バルブ110の組立方法は、実施の形態1における圧電式バルブ10の組立方法とステップ2及びステップ3の工程において異なる。
【0072】
(1)ステップ1
前記アクチュエータ30において、前記圧電素子32に所定の電圧を印加し、前記弁体31を開弁方向へ動作させる。
【0073】
(2)ステップ2
前記アクチュエータ30を前記プレート140上に装着し、前記開弁方向へ動作させた前記弁体31を前記プレート140に設けられる前記弁座144の弁座面に当接させる。
【0074】
(3)ステップ3
次に、前記気体排出路123の外部から負圧を作用させて当該気体排出路123からのエア漏れの有無を確認し、該エア漏れがある場合には前記弁体31と前記弁座面との当接状態を調整した上で、前記アクチュエータ30を前記プレート140に対し固定する。
このとき、前記アクチュエータ30は、該アクチュエータ30のベース基板36に形成される複数の貫通孔38と、前記プレート140に形成される複数のネジ穴141を利用して、前記プレート140に対しネジにより固定される。
ここで、前記アクチュエータ30と前記プレート140との相対的な位置関係は、前記ステップ2の工程により変化を生じるが、前記貫通孔38が前記ネジ穴141にねじ込まれるネジの軸の外径よりも大きな開口とされるため、当該位置関係の変化に対応することができる。
【0075】
次に、前記プレート140の先端部に設けられる気体排出部142を、前記バルブ本体120に形成される気体排出部装着部126に装着するとともに、前記プレート140を前記バルブ本体120に対し固定する。
このとき、前記プレート140は、該プレート140に形成される複数の貫通孔145又はネジ穴と、前記バルブ本体120に形成される複数のネジ穴127を利用して、前記バルブ本体120に対しネジにより固定される。
【0076】
(4)ステップ4
次に、前記ステップ1の工程において前記圧電素子32に印加した電圧を解除し、前記開弁方向へ動作させた分の原状復帰力を前記弁体31に対し作用させる。
このとき、前記ゴム製の弁体31は前記樹脂性の弁座144の弁座面に対し潰し代をもって押し付けられるため、前記ステップ2の工程において前記弁体31を前記弁座144の弁座面に当接させた際、仮に両者間に隙間が存在したとしても、該隙間を確実に閉鎖することができる。
【0077】
(5)ステップ5
次に、前記気体排出路123の外部から負圧を作用させて吸引することで、前記気体排出路143からエアの漏れが無いか検査する。
なお、前記ステップ3の工程において前記気体排出路123に負圧を作用させた状態を維持しつつ、前記ステップ4の工程における作業を行えば、当該ステップ5の工程における作業を前記ステップ4の工程における作業と同時に行うことができる。
【0078】
以上のとおり、上記圧電式バルブの組立方法によっても、圧電素子32に印加した所定の電圧を解除するのに伴う弁体の復帰力により、前記弁体31が前記弁座124の弁座面に潰し代をもって押し付けられるので、当該組立方法により組み立てられた圧電式バルブは、閉弁時にエア漏れを起こす虞がない。
【0079】
また、上記圧電式バルブ110は、前記気体排出部142が、前記バルブ本体120に対し着脱可能とされる前記プレート140に設けられているので、前記ステップ2及びステップ3における組み付け作業が容易となり、圧電式バルブの組み立ての効率化を図ることができる。
【0080】
さらに、上記圧電式バルブ110は、前記バルブ本体120にガイド突起128が形成され、前記プレート140に前記ガイド突起128が挿入されるガイド突起用開口147が形成されるので、前記プレート140を前記バルブ本体120に固定する作業が容易となる。
【0081】
なお、上記圧電式バルブ110において、前記アクチュエータ30は前記プレート140に対しネジにより固定されることとしたが、他の方法により固定されることとしてもよい。また、上記圧電式バルブ110において、前記プレート140は前記バルブ本体120に対しネジにより固定されることとしたが、他の方法により固定されることとしてもよい
【0082】
<光学式粒状物選別機>
上記圧電式バルブ110は、実施の形態1における圧電式バルブ10と同様に、光学式粒状物選別機の噴風ノズルに利用することができる。
そして、上記圧電式バルブ110を利用した噴風ノズルを備える光学式粒状物選別機も、上記圧電式バルブ110が閉弁時にエア漏れを起こす虞がなく選別精度が安定する。
【0083】
また、上記圧電式バルブ110を利用した噴風ノズルを備える光学式粒状物選別機も、前記噴風ノズルが、上記圧電式バルブ110を複数並設して組み込んでなるものであれば、前記複数の圧電式バルブが開弁するタイミングをほぼ均一化することができるため選別精度が向上する。
【0084】
なお、上記各実施の形態の説明に用いた図面は、いずれも各圧電式バルブの内部構造を説明するためのものであって、上記各圧電式バルブがバルブ本体の側面を密閉した状態で使用されることは言うまでもない。
【0085】
本発明は、上記実施の形態に限るものでなく、発明の範囲を逸脱しない限りにおいてその構成を適宜変更できることはいうまでもない。
【産業上の利用可能性】
【0086】
本発明の圧電式バルブの組立方法により組み立てられる圧電式バルブは閉弁時にエア漏れを起こす虞がないため、極めて利用価値が高い。
【符号の説明】
【0087】
10 圧電式バルブ
20 バルブ本体
21 気体圧力室
22 気体排出部
23 気体排出路
24 弁座
25 ベース基板装着部
26 ネジ穴
30 アクチュエータ
31 弁体
32 圧電素子
33 変位拡大機構
34 変位拡大部
34a 第1変位拡大部
34b 第2変位拡大部
35 変位伝達部
36 ベース基板
37 キャップ部材
38 貫通孔
39 第1ヒンジ
40 第2ヒンジ
41 第1アーム
41a 板バネ取り付け部
42 第1板バネ
43 第3ヒンジ
44 第4ヒンジ
45 第2アーム
45a 板バネ取り付け部
46 第2板バネ
110 圧電式バルブ
120 バルブ本体
121 気体圧力室
125 ベース基板装着部
126 気体排出部装着部
127 ネジ穴
128 ガイド突起
130 アクチュエータ
140 プレート
141 貫通孔又はネジ穴
142 気体排出部
143 気体排出路
144 弁座
145 貫通孔
146 圧電素子用開口
147 ガイド突起用開口
210 光学式粒状物選別機
240 傾斜状シュート
250a,250b 光学検出装置
251a,251b CCDカメラ(撮像手段)
260 制御装置
270 噴風装置
271 噴風ノズル
273 圧縮空気供給装置
【技術分野】
【0001】
本発明は、圧電素子の変位を利用してバルブの開閉を行う圧電式バルブの組立方法及び該組立方法により組み立てられる圧電式バルブ、並びに該圧電式バルブを利用した噴風手段を備える光学式粒状物選別機に関する。
【背景技術】
【0002】
従来、穀粒や樹脂ペレット等の粒状物を噴風により吹き飛ばして良品と不良品に選別したり、粒状物に混入する異物等を噴風により除去したりする光学式粒状物選別機が知られている。
この種の粒状物選別機は、搬送路の端部から所定の軌跡に沿って落下する粒状物を、不良品等の検出信号に基づいて噴風により吹き飛ばし除去することで、該粒状物の選別を行うものである。
【0003】
上記粒状物選別機は、連続的かつ大量に落下する粒状物の中から不良品等をエアの噴風により吹き飛ばすものであり、当該不良品等のみを他の粒状物を巻き込むことなく精度よく吹き飛ばすためには噴風ノズルに応答性のよいバルブを備えることが必要となる。
そこで、先に、圧電素子を利用することでバルブの開閉を高速で行える圧電式エアバルブが提案されている(特許文献1参照。)。
【0004】
特許文献1に記載された圧電式エアバルブは、高速応答性能に優れる圧電素子の特性を利用するものであり、圧電素子の小さな変位をテコの原理に基づき拡大する変位拡大機構を備えるものである。
【0005】
図19は、特許文献1に記載された圧電式エアバルブの概略図を示す。
図19に示す圧電式エアバルブは、圧電素子70の長手方向軸線と弁体95とを結ぶ直線を中心に、図面上、上下対称に二つの変位拡大機構が設けられたものである。
【0006】
上側変位拡大機構は、第1ヒンジ91、第2ヒンジ92、第1アーム部材93及び第1板ばね94で構成される。前記第1ヒンジ91の一端はベース基板100に接合される。前記第2ヒンジ92の一端はキャップ部材69に接合される。前記第1ヒンジ91及び第2ヒンジ92の各他端は、前記第1アーム部材93の基部に接合される。前記第1アーム部材93は、基部から前記圧電素子70の長手方向軸線と弁体95とを結ぶ直線に対して外方(図面上、斜め上方)に向かって延びており、そのほぼ先端部分には、後述する第2ばね99と協働して前記弁体95を弁座64に確実に押し当てる、適度な弾性、柔軟性、可撓性とを具えた前記第1板ばね94の一端が接合される。前記第1板ばね94の他端は前記弁体95の一方側の側端部に接合される。
【0007】
下側変位拡大機構は、第3ヒンジ96、第4ヒンジ97、第2アーム部材98及び第2板ばね99で構成される。前記第3ヒンジ96の一端は前記ベース基板100に接合される。前記第4ヒンジ97の一端は前記キャップ部材69に接合される。前記第3ヒンジ96及び第4ヒンジ97の各他端は、前記第2アーム部材98の基部に接合される。前記第2アーム部材98は、基部から前記圧電素子70の長手方向軸線と弁体95とを結ぶ直線に対して外方(図面上、斜め下方)に向かって延びており、そのほぼ先端部分に前記第2板ばね99の一端が接合される。前記第2板ばね99の他端は前記弁体95の他方側の側端部に接合される。
【0008】
上記圧電式エアバルブは、前記圧電素子70に電圧を印加すると、該圧電素子70の伸長方向への変位が前記一対の変位拡大機構を介して前記弁体95に伝わり、該弁体95を速やかに移動させて開弁する。
また、上記圧電式エアバルブは、前記圧電素子70への電圧印加を解除すると、当該圧電素子70の原状復帰に伴う復帰力が前記一対の変位拡大機構を介して前記弁体95に伝わり、該弁体95を速やかに前記弁座64に当接させて閉弁する。
【0009】
そして、上記圧電式エアバルブを備える光学式粒状物選別機は、上記圧電式エアバルブが従来の電磁バルブに比べてバルブ開閉時の応答性に優れることから、不良品等を精度よく吹き飛ばし、かつ前後の良品等を巻き込んで吹き飛ばすおそれの少ないものである。
【0010】
ところで、上記圧電式エアバルブは、前記圧電素子70、前記一対の変位拡大機構及び前記弁体95を前記ベース基板100に接合してユニット化することで、該圧電式エアバルブの組立作業や保守作業を容易とするものである。
【0011】
即ち、上記圧電式エアバルブは、エアバルブ本体61に予め設けられたユニット装着領域101に前記ユニット化された部材が組み込まれ、前記圧電素子70への通電が無い状態で、前記弁体95と前記エアバルブ本体61に設けられる前記弁座64との密着状態が適当となるように図面上左右方向が調節され、図面上右方向に適当な圧力が加えられた状態で、前記ユニット化された部材が適当な固定手段102により前記エアバルブ本体61に固定され組み立てられる。
【0012】
ところが、上記圧電式エアバルブは、前記一対の変位拡大機構の加工精度や前記各アーム部材93,98に対する前記各板バネ94,99の溶接等による取付精度、前記エアバルブ本体61に対する前記ユニット化された部材の組付精度等の製造上の問題により、前記弁体95が前記弁座64に対し平行にならなかったり、平行に動かなかったりする場合があり、閉弁時に前記弁体95と弁座64との間に隙間ができてエア漏れを起こす虞があった。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】特許第4344164号公報
【発明の概要】
【発明が解決しようとする課題】
【0014】
そこで、本発明は、閉弁時にエア漏れを起こす虞がない圧電式バルブの組立方法を提供することを目的とする。
また、本発明は、上記組立方法により組み立てられて、閉弁時にエア漏れを起こす虞がない圧電式バルブを提供することを目的とする。
さらに、本発明は、閉弁時にエア漏れを起こす虞がない上記圧電式バルブを利用した噴風手段を備える光学式粒状物選別機を提供することを目的とする。
【課題を解決するための手段】
【0015】
上記目的を達成するため、本発明は、外部から供給される圧縮気体を受け入れる気体圧力室、該気体圧力室から前記圧縮気体を排出する気体排出路及び該気体排出路の入り口側端部であって弁座が形成される気体排出部、を有するバルブ本体と、前記気体圧力室に配置され前記気体排出路を開閉する弁体、前記弁体の動作に必要な駆動力を変位として発生する圧電素子、前記弁体における動作方向の軸線に対して対称に設けられ、前記圧電素子の変位を拡大して前記弁体に作用させる一対の変位拡大機構、を有するアクチュエータと、を備えてなる圧電式バルブの組立方法であって、前記圧電素子に所定の電圧を印加して前記弁体を開弁方向へ動作させる工程と、前記開弁方向へ動作させた弁体を前記弁座の弁座面に当接させる工程と、前記アクチュエータを前記バルブ本体に対し直接又は間接に固定する工程と、前記圧電素子に印加した所定の電圧を解除する工程と、を含むことを特徴とするものである。
【0016】
本発明は、前記気体排出部が、前記バルブ本体に対し着脱可能とされるプレートに設けられており、前記開弁方向へ動作させた弁体を前記前記弁座の弁座面に当接させた後、前記アクチュエータを前記プレートに固定し、その後、前記プレートを前記バルブ本体に固定することが好ましい。
【0017】
本発明は、前記弁体における動作方向の軸線が、前記弁体と前記圧電素子の長手方向軸線とを結ぶ直線であることが好ましい。
【0018】
本発明は、外部から前記気体排出路に負圧を作用させ、前記気体排出路からのエア漏れがない状態を確認した後に、前記アクチュエータを前記バルブ本体又は前記プレートに固定することが好ましい。
【0019】
本発明は、外部から供給される圧縮気体を受け入れる気体圧力室、該気体圧力室から前記圧縮気体を排出する気体排出路及び該気体排出路の入り口側端部であって弁体が当接する弁座が形成される気体排出部、を有するバルブ本体と、前記気体圧力室に配置され前記気体排出路を開閉する弁体、前記弁体の動作に必要な駆動力を変位として発生する圧電素子、前記弁体における動作方向の軸線に対して対称に設けられ、前記圧電素子の変位を拡大して前記弁体に作用させる一対の変位拡大機構、を有するアクチュエータと、を備えてなる圧電式バルブであって、前記圧電式バルブの組立方法によって組み立てられ、前記圧電素子に印加した前記所定の電圧を解除することに伴う前記弁体の復帰力により、前記弁体が前記弁座面に押し付けられることを特徴とするものである。
【0020】
本発明は、前記弁体における動作方向の軸線が、前記弁体と前記圧電素子の長手方向軸線とを結ぶ直線であることが好ましい。
【0021】
本発明は、被選別物を移送する移送手段と、該移送手段の端部から落下する被選別物を検出位置において検出する光学検出手段と、該光学検出手段のさらに下方に設けられ当該光学検出手段による検出結果に基づいて前記被選別物をエアの噴風により吹き飛ばす噴風手段とを備えてなる光学式粒状物選別機であって、前記噴風手段は、前記圧電式バルブを備え、前記光学検出手段による検出結果に基づいて前記圧電式バルブを駆動しエアを噴風することを特徴とするものである。
【0022】
本発明は、前記噴風手段が、前記圧電式バルブを複数並設してなり、前記光学検出手段による検出結果に基づいて前記圧電式バルブを選択的に駆動しエアを噴風することが好ましい。
【発明の効果】
【0023】
本発明の圧電式バルブの組立方法によれば、圧電素子に印加した所定の電圧を解除することに伴う弁体の復帰力により、前記弁体が前記弁座の弁座面に押し付けられるので、前記開弁方向へ動作させた弁体を前記弁座の弁座面に当接させる際に、仮に両者の間に隙間が存在したとしても、閉弁時にエア漏れを起こす虞がない。
【0024】
本発明の圧電式バルブの組立方法は、前記気体排出部が、前記バルブ本体に対し着脱可能とされるプレートに設けられているものであれば、前記弁体を前記弁座面に当接させる際の組み付け作業が容易となり、圧電式バルブの組み立ての効率化を図ることができる。
【0025】
本発明の圧電式バルブの組み立て方法は、気体排出路からのエア漏れがない状態を確認した後に、前記アクチュエータを前記バルブ本体又は前記プレートに固定することとすれば、閉弁時におけるエア漏れを確実に防ぐことができる。
【0026】
本発明の圧電式バルブは、前記圧電素子に印加した前記所定の電圧を解除することに伴う前記弁体の復帰力により、前記弁体が前記弁座面に潰し代をもって押し付けられるので、閉弁時にエア漏れを起こす虞がない。
【0027】
本発明の光学式粒状物選別機は、前記噴風手段が、前記圧電式バルブを備え、前記光学検出手段による検出結果に基づいて前記圧電式バルブを駆動しエアを噴風することとすれば、前記圧電式バルブが閉弁時にエア漏れを起こす虞がないため選別精度が安定する。
また、本発明の光学式粒状物選別機は、前記噴風手段が、前記圧電式バルブを複数並設してなり、前記光学検出手段による検出結果に基づいて前記圧電式バルブを選択的に駆動しエアを噴風することとすれば、前記複数の圧電式バルブが開弁するタイミングをほぼ均一化することができるため選別精度が向上する。
【図面の簡単な説明】
【0028】
【図1】実施の形態1における圧電式バルブの概略斜視図。
【図2】図1に示す圧電式バルブの概略説明図。
【図3】図2に示すバルブ本体の概略説明図。
【図4】図2に示すアクチュエータの概略説明図。
【図5】図2に示す圧電式バルブの開弁動作の説明図。
【図6】実施の形態1における圧電式バルブの組立工程の説明図。
【図7】実施の形態1における圧電式バルブの組立工程の説明図。
【図8】実施の形態1における圧電式バルブの組立工程の説明図。
【図9】実施の形態1における圧電式バルブの組立工程の説明図。
【図10】実施の形態1における圧電式バルブの組立工程の説明図。
【図11】圧電式バルブを利用した噴風手段を備える光学式粒状物選別機の要部側面図。
【図12】図11に示す光学式粒状物選別機の制御ブロック図。
【図13】実施の形態2における圧電式バルブの概略斜視図。
【図14】図13に示す圧電式バルブの概略説明図。
【図15】図14に示すバルブ本体の概略説明図。
【図16】図14に示すプレートの概略説明図。
【図17】図14に示すアクチュエータの概略説明図。
【図18】図16に示すプレートと図17に示すアクチュエータを組み付けた状態の概略説明図。
【図19】特許文献1に記載された圧電式エアバルブの概略説明図。
【発明を実施するための形態】
【0029】
本発明の実施の形態を図面に基づいて説明する。
[実施の形態1]
【0030】
<圧電式バルブの構造>
図1は、圧電式バルブの内部構造を示す概略斜視図である。
図2は、図1に示す圧電式バルブの概略説明図であって、(a)は閉弁時における右側面図、(b)は(a)のA−A断面図を示す。
図2に示すように、本実施の形態において、圧電式バルブ10は、バルブ本体20と該バルブ本体20に取り付けられるアクチュエータ30を備える。
【0031】
図3(a)は、図2に示すバルブ本体の右側面図、(b)は(a)のA−A断面図を示す。
前記バルブ本体20は、外部の圧縮気体供給源(図示せず)から圧縮気体の供給を受ける気体圧力室21と、該気体圧力室21内の圧縮気体を外部に噴出する気体排出部22、前記気体圧力室21から連続し、後述するアクチュエータ30のベース基板36を着脱可能に受け入れるベース基板装着部25を備える。
【0032】
前記気体排出部22には、気体排出路23及び該気体排出路23の入り口側端部であって後述するアクチュエータ30の弁体31が当接する弁座面を有する樹脂製の弁座24が設けられる。
また、前記ベース基板装着部25には、後述するアクチュエータ30のベース基板36を固定するための有底のネジ穴26が複数形成される。
該バルブ本体20は、例えば合成樹脂材料により一体に成形される。
【0033】
図4(a)は、図2に示すアクチュエータの右側面図、(b)は(a)のA−A断面図を示す。
前記アクチュエータ30は、ゴム製の弁体31、該弁体31の動作に必要な駆動力を変位として発生する圧電素子32、前記圧電素子32の変位を拡大して前記弁体31に作用させる変位拡大機構33を備える。
前記弁体31は、前記バルブ本体20の気体排出部22に設けられる弁座24に当接する。該弁体31の材料として滑性ゴムを用いれば、当該弁体31の耐久性が向上する。
【0034】
前記変位拡大機構33は、前記圧電素子32の変位を拡大する変位拡大部34と、前記圧電素子32の変位を前記変位拡大部34に伝達する変位伝達部35を有し、前記弁体31の動作方向の軸線、ここでは、前記弁体31と前記圧電素子32の長手方向軸線を結ぶ直線(以下、「中心線」という。)に対して対称に配置される。
【0035】
前記変位伝達部35は、前記圧電素子32の一端が接合されるU字状のベース基板36と、前記圧電素子32の他端が接合されるキャップ部材37を有する。前記圧電素子32が前記U字状のベース基板36の空間内に配設されることで、前記変位伝達部35は前記圧電素子32の長手方向軸線を中心として対称な配置とされる。
ここでは、前記圧電素子32は、前記U字状のベース基板36の空間内であって該ベース基板36のU字状底部と前記キャップ部材37との間に組み込まれ、前記ベース基板36のU字状底部を塑性変形させることで、前記一端が前記ベース基板36に接合され、前記他端が前記キャップ部材37に接合される。
【0036】
また、前記ベース基板36には、前記バルブ本体20のベース基板装着部25に形成される複数のネジ穴26に対応して複数の貫通孔38が形成される。前記貫通孔38は、前記バルブ本体20に形成される前記複数のネジ穴26にねじ込まれるネジの軸の外径よりも大きな開口を有する。そして、前記ベース基板36は、前記ネジの頭部により前記ベース基板装着部25に対し固定される。
【0037】
前記変位拡大部34は、第1変位拡大部34aと、該第1変位拡大部34aと前記中心線に対して対称な配置とされる第2変位拡大部34bから構成される。
前記第1変位拡大部34aは、第1ヒンジ39、第2ヒンジ40、第1アーム41及び第1板バネ42を有する。前記第1ヒンジ39の一端は前記U字状のベース基板36の一方側先端に対し一体とされ、前記第2ヒンジ40の一端は前記キャップ部材37に対し一体とされる。前記第1アーム41の外側先端部には、くびれ部を介して前記第1板バネ42の取り付け部41aが設けられる。該取り付け部41aには前記第1板バネ42の一端が接合され、該第1板バネ42の他端には前記弁体31の一方側の側端部が接合される。
【0038】
前記第2変位拡大部34bは、第3ヒンジ43、第4ヒンジ44、第2アーム45及び第2板バネ46を有する。前記第3ヒンジ43の一端は前記U字状のベース基板36の他方側先端に対し一体とされ、前記第4ヒンジ44の一端は前記キャップ部材37に対し一体とされる。前記第2アーム45の外側先端部には、くびれ部を介して前記第2板バネ46の取り付け部45aが設けられる。該取り付け部45aには前記第2板バネ46の一端が接合され、該第2板バネ46の他端には前記弁体31の他方側の側端部が接合される。
【0039】
ここで、前記変位伝達部35を構成するベース基板36及びキャップ部材37と、前記変位拡大部34を構成する第1乃至第4ヒンジ39,40,43,44及び第1及び第2アーム41,45とは、例えばステンレス材等の金属材料を打ち抜いて一体に成形することができる。
【0040】
図5は、図2に示す圧電式バルブの開弁動作の説明図を示す。
上記圧電式バルブ10は、閉弁状態において前記圧電素子32に通電すると、当該圧電素子32が図面上左方向に伸長する。当該圧電素子32の伸長に伴う変位は、前記変位伝達部35を介して前記変位拡大部34に伝達され、前記第1変位拡大部34aにおいて、前記第1ヒンジ39を支点、前記第2ヒンジ40を力点、前記第1アーム41の外側先端部を作用点としてテコの原理により拡大され、前記第1アーム41の外側先端部を大きく変位させる。また、前記圧電素子32の伸長に伴う変位は、同様に、前記第2変位拡大部34bにおいて、前記第3ヒンジ43を支点、第4ヒンジ44を力点、第2アーム45の外側先端部を作用点として、前記第2アーム45の外側先端部を大きく変位させる。
【0041】
そして、前記第1アーム41の外側先端部と前記第2アーム45の外側先端部の各変位は、前記第1板バネ42及び第2板バネ46を介して前記弁体31を前記バルブ本体20の気体排出部22に設けられる前記弁座24から離間させる。これにより前記圧電式バルブ10が開弁し、前記バルブ本体20の気体圧力室21内の圧縮気体は前記気体排出部22に形成される気体排出路23から外部に噴出される。
【0042】
一方、上記圧電式バルブ10は、前記圧電素子32への通電が解除されると該圧電素子32が収縮し、当該収縮が前記変位伝達部35を介して前記第1及び第2変位拡大部34a,34bに伝達され、前記第1及び第2板バネ42,46を介して前記弁体31を前記弁座24に着座させ、前記気体排出路23を閉鎖する。
【0043】
<圧電式バルブの組立方法>
図6乃至10は、上記圧電式バルブ10の組立工程の説明図を示す。
(1)ステップ1
まず、図6に示すように、前記アクチュエータ30において、前記圧電素子32に所定の電圧を印加し、前記弁体31を開弁方向へ動作させる。ここでは、一例として、前記圧電素子32に10Vの電圧を印加して、前記弁体31を開弁方向へ20μm動作させる。
【0044】
(2)ステップ2
次に、図7に示すように、前記アクチュエータ30を前記バルブ本体20に装着し、該アクチュエータ30を図面上左方向に移動させて、前記開弁方向へ20μm動作させた前記弁体31を前記バルブ本体20に設けられる前記弁座24の弁座面に当接させる。
【0045】
(3)ステップ3
次に、図8に示すように、前記バルブ本体20の外部から前記気体排出路23に負圧を作用させて当該気体排出路23からのエア漏れの有無を確認し、該エア漏れがある場合には前記弁体31と前記弁座面との当接状態を調整した上で、前記アクチュエータ30を前記バルブ本体20に対し固定する。
このとき、前記アクチュエータ30は、前記ベース基板36に形成される複数の貫通孔38と、前記バルブ本体20のベース基板装着部25に形成される複数のネジ穴26を利用して、前記バルブ本体20に対しネジにより固定される。
ここで、前記アクチュエータ30と前記バルブ本体20との相対的な位置関係は、前記ステップ2の工程により変化するが、前記貫通孔38が前記ネジ穴26にねじ込まれるネジ軸の外径よりも大きな開口とされるため、当該位置関係の変化に対応することができる。
【0046】
(4)ステップ4
次に、図9に示すように、前記ステップ1の工程において前記圧線素子32に印加した10Vの電圧を解除し、前記開弁方向へ動作させた20μm分の原状復帰力を前記弁体31に対し作用させる。
このとき、前記ゴム製の弁体31は前記樹脂性の前記弁座24の弁座面に対し潰し代をもって押し付けられるため、前記ステップ2の工程において前記弁体31を前記弁座24の弁座面に当接させた際、仮に両者の間に隙間が存在したとしても、該隙間を確実に閉鎖することができる。
【0047】
(5)ステップ5
次に、図10に示すように、前記バルブ本体20の外部から前記気体排出路23に負圧を作用させて吸引することで、前記気体排出路23からのエア漏れが無いか検査する。
なお、前記ステップ3の工程において前記気体排出路23に負圧を作用させた状態を維持しつつ、前記ステップ4の工程における作業を行えば、当該ステップ5の工程における作業を前記ステップ4の工程における作業と同時に行うことができる。
【0048】
以上のとおり、上記圧電式バルブの組立方法によれば、圧電素子32に印加した所定の電圧を解除するのに伴う弁体31の復帰力により、前記弁体31が前記弁座24の弁座面に潰し代をもって押し付けられるので、当該組立方法により組み立てられた圧電式バルブは、閉弁時にエア漏れを起こす虞がない。
【0049】
なお、上記圧電式バルブ10において、前記アクチュエータ30は前記バルブ本体20に対しネジにより固定されることとしたが、他の方法により固定されることとしてもよい。
【0050】
また、上記圧電式バルブ10において、前記アクチュエータ30の弁体31を前記バルブ本体20の弁座24の弁座面に当接させる際に、前記アクチュエータ30を前記弁座面に対し直線的に移動させることができるガイド機構を、前記バルブ本体20とアクチュエータ30との間に設けておけば、前記バルブ本体20と前記アクチュエータ30との組み付け精度により前記弁体24と弁座面が平行にならない問題を防止できる。
【0051】
<光学式粒状物選別機>
次に、上記組立方法によって組み立てられる圧電式バルブを利用した噴風ノズルを備える光学式粒状物選別機について説明する。
図11は、光学式粒状物選別機の内部構造を簡略化して示した要部側断面図を示す。図12は、光学式粒状物選別機における制御ブロック図を示す。
光学式粒状物選別機210は、上部にタンク220と振動フィーダ230とからなる粒状物供給部を有する。粒状物供給部の下方には所定幅を有する傾斜状シュート240が配置される。
前記粒状物供給部から供給された粒状物は、前記傾斜状シュート240上を幅方向に広がって連続状に自然流下した後、その下端から所定の落下軌跡に沿って空中に放出される。
【0052】
前記所定の落下軌跡の前後には、前記傾斜状シュート240の幅方向に平行に直線状に延びる粒状物検出位置Oにおいて粒状物を撮像する少なくとも一対の光学検出装置250a,250bが対向して配設される。各光学検出装置250a,250bは、それぞれCCDラインセンサを内蔵するCCDカメラ等の撮像手段251a,251b、蛍光灯等からなる照明手段252a,252b、及び前記粒状物を撮像する際の背景となるバックグラウンド253a,253b等から構成される。
【0053】
また、前記粒状物検出位置Oの下方には、不良品等をエアの噴風により除去する噴風装置270が配設される。前記噴風装置270は、上記組立方法により組み立てられた圧電式バルブ10を複数並設して組み込んだ噴風ノズル271と、該噴風ノズル271に圧縮空気を送る圧縮空気供給装置273を備え、前記各光学検出装置250a,250bの検出結果に基づいて、前記傾斜状シュート240の下端から放出される粒状物を、該粒状物の落下軌跡の幅方向各位置に対応して設けられる前記噴風ノズル271の複数のノズル孔からのエアの噴射により吹き飛ばす。なお、前記圧電式バルブ10の圧電素子32は、駆動装置272の駆動回路と電気的に接続される。
【0054】
上記光学式粒状物選別機210において、前記傾斜状シュート240を幅方向に広がって連続状に自然流下した後、その下端から所定の落下軌跡に沿って空中に放出される粒状物は、前記粒状物検出位置Oにおいて前記各光学検出装置250a,250bの撮像手段251a,251bにより撮像され、当該撮像データが制御装置260に送られる。該制御装置260は、前記撮像データに基づいて不良品等の除去すべき粒状物を特定するとともに当該粒状物の大きさ等に関する情報を取得し、前記不良品等の排除信号を前記駆動装置272に送る。
【0055】
前記噴風装置270は、前記駆動装置272に送られる前記排除信号に基づいて前記複数の圧電式バルブ10を選択的に駆動し、前記傾斜状シュート240の幅方向に平行に直線状に延びる粒状物排除位置Eを通過する不良品等に対し、該幅方向の各位置に対応して設けられる前記噴風ノズル271の各ノズル孔からエアを噴風する。
【0056】
そして、前記噴風ノズル271の各ノズル孔からの噴風により吹き飛ばされた不良品等は、不良品排出口281から機外に排出される。また、噴風により吹き飛ばされることなく所定の落下軌跡をそのまま通過した良品等は、良品排出口282から回収される。
【0057】
上記光学式粒状物選別機において、選別対象となる粒状物は、代表的には穀物粒、特に米粒であるが、必ずしも穀物粒に限られるわけではなく、その対象物は、噴風によって吹き飛ばすことが可能な大きさと質量である限り何でも構わない。
【0058】
以上のとおり、上記光学式粒状物選別機は、前記噴風ノズル271が上記組立方法によって組み立てられた圧電式バルブ10を備えるので、該圧電式バルブ10が閉弁時にエア漏れを起こす虞がなく選別精度が安定する。
【0059】
また、上記光学式粒状物選別機は、前記噴風ノズル271が、上記圧電式バルブ10を複数並設して組み込んでなるので、前記複数の圧電式バルブが開弁するタイミングをほぼ均一化することができるため選別精度が向上する。
【0060】
次に、本発明の他の実施の形態について説明する。
[実施の形態2]
【0061】
<圧電式バルブの構造>
図13は、圧電式バルブの内部構造を示す概略斜視図である。
図14は、図13に示す圧電式バルブの概略説明図であって、(a)は閉弁時における右側面図、(b)は(a)のA−A断面図を示す。
図14に示すように、本実施の形態において、圧電式バルブ110は、バルブ本体120と、該バルブ本体120に取り付けられるプレート140と、該プレート140に取り付けられるアクチュエータ30を備える。
【0062】
前記圧電式バルブ110は、前記バルブ本体120に対し着脱可能とされる気体排出部142を有し、該気体排出部142が前記プレート140の先端部に設けられている点で、実施の形態1における圧電式バルブ10と構造的に異なる。
【0063】
図15(a)は、図14に示すバルブ本体の右側面図、(b)は(a)のA−A断面図を示す。
前記バルブ本体120は、外部の圧縮気体供給源(図示せず)から圧縮気体の供給を受ける気体圧力室121と、後述するプレート140に設けられる気体排出部142を着脱可能に受け入れる気体排出部装着部126と、前記気体圧力室121から連続し、後述するプレート140に取り付けられる後述するアクチュエータ30のベース基板36を受け入れるベース基板装着部125を備える。
【0064】
また、前記バルブ本体120には、後述するプレート140を固定するための有底のネジ穴127が複数形成される。
さらに、該バルブ本体120には、後述するプレート140のガイド突起用開口147内に挿入されるガイド突起128が形成される。
該バルブ本体120は、例えば合成樹脂材料により一体に成形される。
【0065】
図16(a)は、図14に示すプレート140の右側面図、(b)は(a)のA−A断面図を示す。
前記プレート140は、その先端部に気体排出部142を備える。
当該気体排出部142には、気体排出路143及び該気体排出路143の入り口側端部であって後述するアクチュエータ30の弁体31が当接する弁座面を有する樹脂製の弁座144が設けられる。
該気体排出部142は、前記バルブ本体120に設けられる気体排出部装着部126に装着され、前記バルブ本体120の気体圧力室121内の圧縮気体を外部に噴出する。
【0066】
前記プレート140には、後述するアクチュエータ30の圧電素子32が位置する圧電素子用開口146、及び前記バルブ本体120のガイド突起128が挿入されるガイド突起用開口147が形成される。
また、前記圧電素子用開口146の両側部には、後述するアクチュエータ30の圧電素子32と該アクチュエータ30のU字状ベース基板36の内側面とを絶縁する絶縁壁148が形成される。
【0067】
前記プレート140には、前記バルブ本体120に形成される複数のネジ穴127に対応して複数の貫通孔145が形成される。前記貫通孔145は、前記バルブ本体120に形成される複数のネジ穴127にねじ込まれるネジ軸の外径よりも大きな開口を有する。そして、前記プレート140は、前記ネジの頭部により前記バルブ本体120に対し固定される。ここで、前記プレート140には、前記貫通孔145に代えてネジ穴を形成しても構わない。
また、前記プレート140には、後述するアクチュエータ30のベース基板36を固定するためのネジ穴141が複数形成される。
該プレート140は、例えば合成樹脂材料により一体に成形される。
【0068】
図17(a)は、図14に示すアクチュエータ30の右側面図、(b)は(a)のA−A断面図を示す。
当該アクチュエータ30は、図4に示す実施の形態1のアクチュエータ30と同じ構成であるため、ここでの説明は省略する。
【0069】
図18は、前記プレート140と前記アクチュエータ30を組み付けた状態の概略説明図であって、(a)は右側面図、(b)は(a)のA−A断面図を示す。
前記アクチュエータのベース基板36には、前記プレート140に形成される複数のネジ穴141に対応して複数の貫通孔38が形成されている。前記貫通孔38は、前記プレート140に形成される複数のネジ穴141にねじ込まれるネジ軸の外径よりも大きな開口を有する。そして、前記ベース基板36は、前記ネジの頭部により前記プレート140に対し固定される。
【0070】
上記圧電式バルブ110は、図18に示す前記アクチュエータ30を組み付けた状態のプレート140が、前記バルブ本体120に対し固定されてなる。このとき、前記プレート140の先端部に設けられる気体排出部142が、前記バルブ本体120の気体排出部装着部126に装着されている。
前記気体排出部装着部126には、前記気体排出部142との間から圧縮気体が漏れることのないよう、適宜シール部材が配置される。
【0071】
<圧電式バルブの組立方法>
上記圧電式バルブ110の組立方法は、実施の形態1における圧電式バルブ10の組立方法とステップ2及びステップ3の工程において異なる。
【0072】
(1)ステップ1
前記アクチュエータ30において、前記圧電素子32に所定の電圧を印加し、前記弁体31を開弁方向へ動作させる。
【0073】
(2)ステップ2
前記アクチュエータ30を前記プレート140上に装着し、前記開弁方向へ動作させた前記弁体31を前記プレート140に設けられる前記弁座144の弁座面に当接させる。
【0074】
(3)ステップ3
次に、前記気体排出路123の外部から負圧を作用させて当該気体排出路123からのエア漏れの有無を確認し、該エア漏れがある場合には前記弁体31と前記弁座面との当接状態を調整した上で、前記アクチュエータ30を前記プレート140に対し固定する。
このとき、前記アクチュエータ30は、該アクチュエータ30のベース基板36に形成される複数の貫通孔38と、前記プレート140に形成される複数のネジ穴141を利用して、前記プレート140に対しネジにより固定される。
ここで、前記アクチュエータ30と前記プレート140との相対的な位置関係は、前記ステップ2の工程により変化を生じるが、前記貫通孔38が前記ネジ穴141にねじ込まれるネジの軸の外径よりも大きな開口とされるため、当該位置関係の変化に対応することができる。
【0075】
次に、前記プレート140の先端部に設けられる気体排出部142を、前記バルブ本体120に形成される気体排出部装着部126に装着するとともに、前記プレート140を前記バルブ本体120に対し固定する。
このとき、前記プレート140は、該プレート140に形成される複数の貫通孔145又はネジ穴と、前記バルブ本体120に形成される複数のネジ穴127を利用して、前記バルブ本体120に対しネジにより固定される。
【0076】
(4)ステップ4
次に、前記ステップ1の工程において前記圧電素子32に印加した電圧を解除し、前記開弁方向へ動作させた分の原状復帰力を前記弁体31に対し作用させる。
このとき、前記ゴム製の弁体31は前記樹脂性の弁座144の弁座面に対し潰し代をもって押し付けられるため、前記ステップ2の工程において前記弁体31を前記弁座144の弁座面に当接させた際、仮に両者間に隙間が存在したとしても、該隙間を確実に閉鎖することができる。
【0077】
(5)ステップ5
次に、前記気体排出路123の外部から負圧を作用させて吸引することで、前記気体排出路143からエアの漏れが無いか検査する。
なお、前記ステップ3の工程において前記気体排出路123に負圧を作用させた状態を維持しつつ、前記ステップ4の工程における作業を行えば、当該ステップ5の工程における作業を前記ステップ4の工程における作業と同時に行うことができる。
【0078】
以上のとおり、上記圧電式バルブの組立方法によっても、圧電素子32に印加した所定の電圧を解除するのに伴う弁体の復帰力により、前記弁体31が前記弁座124の弁座面に潰し代をもって押し付けられるので、当該組立方法により組み立てられた圧電式バルブは、閉弁時にエア漏れを起こす虞がない。
【0079】
また、上記圧電式バルブ110は、前記気体排出部142が、前記バルブ本体120に対し着脱可能とされる前記プレート140に設けられているので、前記ステップ2及びステップ3における組み付け作業が容易となり、圧電式バルブの組み立ての効率化を図ることができる。
【0080】
さらに、上記圧電式バルブ110は、前記バルブ本体120にガイド突起128が形成され、前記プレート140に前記ガイド突起128が挿入されるガイド突起用開口147が形成されるので、前記プレート140を前記バルブ本体120に固定する作業が容易となる。
【0081】
なお、上記圧電式バルブ110において、前記アクチュエータ30は前記プレート140に対しネジにより固定されることとしたが、他の方法により固定されることとしてもよい。また、上記圧電式バルブ110において、前記プレート140は前記バルブ本体120に対しネジにより固定されることとしたが、他の方法により固定されることとしてもよい
【0082】
<光学式粒状物選別機>
上記圧電式バルブ110は、実施の形態1における圧電式バルブ10と同様に、光学式粒状物選別機の噴風ノズルに利用することができる。
そして、上記圧電式バルブ110を利用した噴風ノズルを備える光学式粒状物選別機も、上記圧電式バルブ110が閉弁時にエア漏れを起こす虞がなく選別精度が安定する。
【0083】
また、上記圧電式バルブ110を利用した噴風ノズルを備える光学式粒状物選別機も、前記噴風ノズルが、上記圧電式バルブ110を複数並設して組み込んでなるものであれば、前記複数の圧電式バルブが開弁するタイミングをほぼ均一化することができるため選別精度が向上する。
【0084】
なお、上記各実施の形態の説明に用いた図面は、いずれも各圧電式バルブの内部構造を説明するためのものであって、上記各圧電式バルブがバルブ本体の側面を密閉した状態で使用されることは言うまでもない。
【0085】
本発明は、上記実施の形態に限るものでなく、発明の範囲を逸脱しない限りにおいてその構成を適宜変更できることはいうまでもない。
【産業上の利用可能性】
【0086】
本発明の圧電式バルブの組立方法により組み立てられる圧電式バルブは閉弁時にエア漏れを起こす虞がないため、極めて利用価値が高い。
【符号の説明】
【0087】
10 圧電式バルブ
20 バルブ本体
21 気体圧力室
22 気体排出部
23 気体排出路
24 弁座
25 ベース基板装着部
26 ネジ穴
30 アクチュエータ
31 弁体
32 圧電素子
33 変位拡大機構
34 変位拡大部
34a 第1変位拡大部
34b 第2変位拡大部
35 変位伝達部
36 ベース基板
37 キャップ部材
38 貫通孔
39 第1ヒンジ
40 第2ヒンジ
41 第1アーム
41a 板バネ取り付け部
42 第1板バネ
43 第3ヒンジ
44 第4ヒンジ
45 第2アーム
45a 板バネ取り付け部
46 第2板バネ
110 圧電式バルブ
120 バルブ本体
121 気体圧力室
125 ベース基板装着部
126 気体排出部装着部
127 ネジ穴
128 ガイド突起
130 アクチュエータ
140 プレート
141 貫通孔又はネジ穴
142 気体排出部
143 気体排出路
144 弁座
145 貫通孔
146 圧電素子用開口
147 ガイド突起用開口
210 光学式粒状物選別機
240 傾斜状シュート
250a,250b 光学検出装置
251a,251b CCDカメラ(撮像手段)
260 制御装置
270 噴風装置
271 噴風ノズル
273 圧縮空気供給装置
【特許請求の範囲】
【請求項1】
外部から供給される圧縮気体を受け入れる気体圧力室、該気体圧力室から前記圧縮気体を排出する気体排出路及び該気体排出路の入り口側端部であって弁座が形成される気体排出部、を有するバルブ本体と、
前記気体圧力室に配置され前記気体排出路を開閉する弁体、前記弁体の動作に必要な駆動力を変位として発生する圧電素子、前記弁体における動作方向の軸線に対して対称に設けられ、前記圧電素子の変位を拡大して前記弁体に作用させる一対の変位拡大機構、を有するアクチュエータと、
を備えてなる圧電式バルブの組立方法であって、
前記圧電素子に所定の電圧を印加して前記弁体を開弁方向へ動作させる工程と、
前記開弁方向へ動作させた弁体を前記弁座の弁座面に当接させる工程と、
前記アクチュエータを前記バルブ本体に対し固定する工程と、
前記圧電素子に印加した所定の電圧を解除する工程と、
を含むことを特徴とする圧電式バルブの組立方法。
【請求項2】
前記気体排出部は、前記バルブ本体に対し着脱可能とされるプレートに設けられており、前記開弁方向へ動作させた弁体を前記弁座の弁座面に当接させた後、前記アクチュエータを前記プレートに固定し、その後、前記プレートを前記バルブ本体に固定する請求項1記載の圧電式バルブの組立方法。
【請求項3】
前記弁体における動作方向の軸線は、前記弁体と前記圧電素子の長手方向軸線とを結ぶ直線である請求項1又は2記載の圧電式バルブの組立方法。
【請求項4】
外部から前記気体排出路に負圧を作用させ、前記気体排出路からのエア漏れがない状態を確認した後に、前記アクチュエータを前記バルブ本体又は前記プレートに固定する請求項1乃至3の何れか一項記載の圧電式バルブの組立方法。
【請求項5】
外部から供給される圧縮気体を受け入れる気体圧力室、該気体圧力室から前記圧縮気体を排出する気体排出路及び該気体排出路の入り口側端部であって弁座が形成される気体排出部、を有するバルブ本体と、
前記気体圧力室に配置され前記気体排出路を開閉する弁体、前記弁体の動作に必要な駆動力を変位として発生する圧電素子、前記弁体における動作方向の軸線に対して対称に設けられ、前記圧電素子の変位を拡大して前記弁体に作用させる一対の変位拡大機構、を有するアクチュエータと、
を備えてなる圧電式バルブであって、
請求項1乃至4の何れかに記載の圧電式バルブの組立方法によって組み立てられ、前記圧電素子に印加した前記所定の電圧を解除することに伴う前記弁体の復帰力により、前記弁体が前記弁座面に押し付けられることを特徴とする圧電式バルブ。
【請求項6】
前記弁体における動作方向の軸線は、前記弁体と前記圧電素子の長手方向軸線とを結ぶ直線である請求項5記載の圧電式バルブ。
【請求項7】
被選別物を移送する移送手段と、該移送手段の端部から落下する被選別物を検出位置において検出する光学検出手段と、該光学検出手段のさらに下方に設けられ当該光学検出手段による検出結果に基づいて前記被選別物をエアの噴風により吹き飛ばす噴風手段とを備えてなる光学式粒状物選別機であって、
前記噴風手段は、請求項5又は6に記載の圧電式バルブを備え、前記光学検出手段による検出結果に基づいて前記圧電式バルブを駆動しエアを噴風することを特徴とする光学式粒状物選別機。
【請求項8】
前記噴風手段が、請求項5又は6に記載の圧電式バルブを複数並設してなり、前記光学検出手段による検出結果に基づいて前記圧電式バルブを選択的に駆動しエアを噴風する請求項7記載の光学式粒状物選別機。
【請求項1】
外部から供給される圧縮気体を受け入れる気体圧力室、該気体圧力室から前記圧縮気体を排出する気体排出路及び該気体排出路の入り口側端部であって弁座が形成される気体排出部、を有するバルブ本体と、
前記気体圧力室に配置され前記気体排出路を開閉する弁体、前記弁体の動作に必要な駆動力を変位として発生する圧電素子、前記弁体における動作方向の軸線に対して対称に設けられ、前記圧電素子の変位を拡大して前記弁体に作用させる一対の変位拡大機構、を有するアクチュエータと、
を備えてなる圧電式バルブの組立方法であって、
前記圧電素子に所定の電圧を印加して前記弁体を開弁方向へ動作させる工程と、
前記開弁方向へ動作させた弁体を前記弁座の弁座面に当接させる工程と、
前記アクチュエータを前記バルブ本体に対し固定する工程と、
前記圧電素子に印加した所定の電圧を解除する工程と、
を含むことを特徴とする圧電式バルブの組立方法。
【請求項2】
前記気体排出部は、前記バルブ本体に対し着脱可能とされるプレートに設けられており、前記開弁方向へ動作させた弁体を前記弁座の弁座面に当接させた後、前記アクチュエータを前記プレートに固定し、その後、前記プレートを前記バルブ本体に固定する請求項1記載の圧電式バルブの組立方法。
【請求項3】
前記弁体における動作方向の軸線は、前記弁体と前記圧電素子の長手方向軸線とを結ぶ直線である請求項1又は2記載の圧電式バルブの組立方法。
【請求項4】
外部から前記気体排出路に負圧を作用させ、前記気体排出路からのエア漏れがない状態を確認した後に、前記アクチュエータを前記バルブ本体又は前記プレートに固定する請求項1乃至3の何れか一項記載の圧電式バルブの組立方法。
【請求項5】
外部から供給される圧縮気体を受け入れる気体圧力室、該気体圧力室から前記圧縮気体を排出する気体排出路及び該気体排出路の入り口側端部であって弁座が形成される気体排出部、を有するバルブ本体と、
前記気体圧力室に配置され前記気体排出路を開閉する弁体、前記弁体の動作に必要な駆動力を変位として発生する圧電素子、前記弁体における動作方向の軸線に対して対称に設けられ、前記圧電素子の変位を拡大して前記弁体に作用させる一対の変位拡大機構、を有するアクチュエータと、
を備えてなる圧電式バルブであって、
請求項1乃至4の何れかに記載の圧電式バルブの組立方法によって組み立てられ、前記圧電素子に印加した前記所定の電圧を解除することに伴う前記弁体の復帰力により、前記弁体が前記弁座面に押し付けられることを特徴とする圧電式バルブ。
【請求項6】
前記弁体における動作方向の軸線は、前記弁体と前記圧電素子の長手方向軸線とを結ぶ直線である請求項5記載の圧電式バルブ。
【請求項7】
被選別物を移送する移送手段と、該移送手段の端部から落下する被選別物を検出位置において検出する光学検出手段と、該光学検出手段のさらに下方に設けられ当該光学検出手段による検出結果に基づいて前記被選別物をエアの噴風により吹き飛ばす噴風手段とを備えてなる光学式粒状物選別機であって、
前記噴風手段は、請求項5又は6に記載の圧電式バルブを備え、前記光学検出手段による検出結果に基づいて前記圧電式バルブを駆動しエアを噴風することを特徴とする光学式粒状物選別機。
【請求項8】
前記噴風手段が、請求項5又は6に記載の圧電式バルブを複数並設してなり、前記光学検出手段による検出結果に基づいて前記圧電式バルブを選択的に駆動しエアを噴風する請求項7記載の光学式粒状物選別機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−108568(P2013−108568A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254310(P2011−254310)
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000001812)株式会社サタケ (223)
【出願人】(502254796)有限会社メカノトランスフォーマ (22)
【出願人】(303061454)クロダニューマティクス株式会社 (11)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000001812)株式会社サタケ (223)
【出願人】(502254796)有限会社メカノトランスフォーマ (22)
【出願人】(303061454)クロダニューマティクス株式会社 (11)
【Fターム(参考)】
[ Back to top ]