
圧電式バルブ及び該圧電式バルブを利用する光学式粒状物選別機
【課題】気体噴出時間が長くなる場合でも、気体を安定して供給することができる圧電式バルブを提供する。
【解決手段】外部から供給される圧縮気体を受け入れる気体圧力室及び該気体圧力室から前記圧縮気体を排出する気体排出路が形成されるバルブ本体と、前記気体圧力室に配置され前記気体排出路を開閉する弁体と、前記弁体の動作に必要な駆動力を変位として発生する圧電素子と、前記圧電素子の変位を拡大し前記弁体に作用させる少なくとも一つの変位拡大機構と、前記圧電素子に電圧を印加して前記弁体を開弁動作させ前記気体排出路を開放する駆動手段と、を備えてなる圧電式バルブにおいて、前記駆動手段は、開弁時における前記気体排出路からの気体噴出量の変動を抑止するよう前記圧電素子に対し多段階に電圧を印加することを特徴とする。
【解決手段】外部から供給される圧縮気体を受け入れる気体圧力室及び該気体圧力室から前記圧縮気体を排出する気体排出路が形成されるバルブ本体と、前記気体圧力室に配置され前記気体排出路を開閉する弁体と、前記弁体の動作に必要な駆動力を変位として発生する圧電素子と、前記圧電素子の変位を拡大し前記弁体に作用させる少なくとも一つの変位拡大機構と、前記圧電素子に電圧を印加して前記弁体を開弁動作させ前記気体排出路を開放する駆動手段と、を備えてなる圧電式バルブにおいて、前記駆動手段は、開弁時における前記気体排出路からの気体噴出量の変動を抑止するよう前記圧電素子に対し多段階に電圧を印加することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、圧電素子の変位を利用してバルブの開閉を行う圧電式バルブ、及び前記圧電式バルブを利用して噴風により粒状物の不良品等を吹き飛ばし選別を行う光学式粒状物選別機に関する。
【背景技術】
【0002】
従来、穀粒や樹脂ペレット等の粒状物を噴風により吹き飛ばし良品と不良品に選別したり、粒状物に混入する異物等を噴風により除去したりする光学式粒状物選別機が知られている。
この種の粒状物選別機は、搬送路の端部から所定の軌跡に沿って落下する粒状物を不良品等の検出信号に基づいて噴風により吹き飛ばし除去することで、該粒状物の選別を行うものである。
【0003】
上記粒状物選別機は、連続的かつ大量に落下する粒状物の中から不良品等をエアの噴風により吹き飛ばすものであり、当該不良品等のみを他の粒状物を巻き込むことなく精度よく吹き飛ばすためには噴風ノズルに応答性のよいバルブを備えることが必要となる。
そこで、本件出願人は、先に圧電素子を利用してバルブの開閉を高速で行うことができる圧電式エアバルブを提案した(特許文献1参照。)。
【0004】
特許文献1に記載された圧電式エアバルブは、高速応答性能に優れる圧電素子の特性を利用するものであり、圧電素子の小さな変位をテコの原理に基づき拡大する変位拡大機構を備えるものである。
【0005】
当該圧電式エアバルブは、圧電素子に電圧を印加すると、当該圧電素子の伸長方向への変位が前記変位拡大機構を介して弁体に伝わり、該弁体を速やかに移動させて開弁するものである。
また、当該圧電式エアバルブは、圧電素子への電圧印加を解除すると、圧電素子の原状復帰に伴い当該復帰力が前記変位拡大機構を介して弁体に伝わり、該弁体を速やかに弁座に当接させて閉弁するものである。
【0006】
上記圧電式エアバルブを備える光学式粒状物選別機は、従来の電磁バルブに比べてバルブ開閉時における応答性に優れることから、不良品等を精度よく吹き飛ばしかつ前後の良品等を巻き込んで吹き飛ばすおそれの少ないものである。
【0007】
ところで、この種の粒状物選別機において、選別精度を向上させるため、粒状物の落下速度や大きさ等に対応してエアの噴風時間を変更することが行われている(特許文献2,3参照。)。
【0008】
ところが、上記圧電式エアバルブを備える光学式粒状物選別機は、該圧電式エアバルブが変位拡大機構を介して弁体を移動させるものであるため、エアの噴風時間が長くなる場合、前記弁体が振動してノズルからの噴風量が変動し、安定した選別作用を得られなくなるおそれがある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−316835号公報
【特許文献2】特開平11−179292号公報
【特許文献3】実開平6−41876号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
そこで、本発明は、気体の噴出時間が長くなる場合でも、該気体を安定して供給することができる圧電式バルブを提供することを目的とする。
また、本発明は、上記圧電式バルブを利用することで、不良品等を確実に吹き飛ばすことができ、粒状物の安定した選別作用を得ることができる光学式粒状物選別機を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するため、本発明は、外部から供給される圧縮気体を受け入れる気体圧力室及び該気体圧力室から前記圧縮気体を排出する気体排出路が形成されるバルブ本体と、前記気体圧力室に配置され前記気体排出路を開閉する弁体と、前記弁体の動作に必要な駆動力を変位として発生する圧電素子と、前記圧電素子の変位を拡大し前記弁体に作用させる少なくとも一つの変位拡大機構と、前記圧電素子に電圧を印加して前記弁体を開弁動作させ前記気体排出路を開放する駆動手段と、を備えてなる圧電式バルブにおいて、前記駆動手段は、開弁時における前記気体排出路からの気体噴出量の変動を抑止するよう前記圧電素子に対し多段階に電圧を印加することを特徴とするものである。
【0012】
本発明は、前記駆動手段が、前記弁体を開弁駆動する第一の電圧と、当該第一の電圧よりも高く開弁後の気体噴出量を維持する第二の電圧を、前記圧電素子に対し段階的に印加することが好ましい。
【0013】
本発明は、前記駆動手段が、第一の電圧値とその印加時間及び第二の電圧値を予め記憶し設定することが好ましい。
【0014】
本発明は、前記駆動手段が、閉弁後における前記気体排出路からの気体漏れを防止するよう前記圧電素子に印加する電圧を段階的に解除することが好ましい。
【0015】
本発明は、前記駆動手段が、前記圧電素子に印加する電圧を解除した後、閉弁後における前記気体排出路からの気体漏れを防止するようパルス状の電圧を印加することが好ましい。
【0016】
また、本発明は、被選別物を移送する移送手段と、該移送手段の端部から落下する被選別物を検出位置において検出する光学検出手段と、該光学検出手段のさらに下方に設けられ当該光学検出手段による検出結果に基づいて被選別物をエアの噴風により吹き飛ばす噴風手段とを備えてなる光学式粒状物選別機において、
前記噴風手段は、前記何れかの圧電式バルブを備え、前記光学検出手段による検出結果に基づいて前記圧電式バルブを駆動しエアを噴風することを特徴とするものである。
【発明の効果】
【0017】
本発明の圧電式バルブは、駆動手段が、開弁時における気体排出路からの気体噴出量の変動を抑止するよう圧電素子に対し多段階に電圧を印加するものであるので、気体噴出時間が長くなる場合であっても、気体を安定して供給することができる。
【0018】
本発明の圧電式バルブは、駆動手段が、弁体を開弁駆動する第一の電圧と、第一の電圧よりも高く開弁後の気体噴出量を維持する第二の電圧を、圧電素子に対し段階的に印加するものとすれば、開弁に伴い発生する弁体の振動を、第二の電圧の印加によって抑止することができ、気体噴出時間が長くなる場合であっても、気体を安定して供給することができる。
【0019】
本発明の圧電式バルブは、駆動手段が、第一の電圧値とその印加時間及び第二の電圧値を予め記憶し設定するものとすれば、開弁に伴い発生する弁体の振動を、第二の電圧の印加によって確実に抑止することができ、気体噴出時間が長くなる場合であっても、気体を安定して供給することができる。
【0020】
本発明の圧電式バルブは、駆動手段が、閉弁後における気体排出路からの気体漏れを防止するタイミングで圧電素子に印加する電圧を段階的に解除するものとすれば、弁体が着座する際の衝撃を吸収・緩和し、該弁体のバウンドを防止して閉弁後における気体排出路からの気体漏れを防止することができる。
【0021】
本発明の圧電式バルブは、駆動手段が、圧電素子に印加する電圧を解除した後、閉弁後における気体排出路からの気体漏れを防止するタイミングでパルス状の電圧を印加するものとすれば、弁体が着座する際の衝撃を吸収・緩和し、該弁体のバウンドを防止して閉弁後における気体排出路からの気体漏れを防止することができる。
【0022】
本発明の光学式粒状物選別機は、上記何れかの圧電式バルブを備えるものであれば、噴風時間が長くなる場合であっても、エアを安定して供給することができ、当該圧電式バルブの開閉時における応答性の良さと相俟って、前後の良品を巻き込むことなく不良品等を確実に吹き飛ばすことができ、粒状物の安定した選別を行うことができる。
【図面の簡単な説明】
【0023】
【図1】圧電式バルブの概略説明図。
【図2】図1の圧電式バルブにおいて、圧電素子に印加する従来例の電圧波形とバルブから噴出するエアの圧力特性との関係を示すグラフ。
【図3】圧電式バルブの圧電素子に印加する本発明の電圧波形の一例を示す図。
【図4】図1の圧電式バルブにおいて、圧電素子に印加する本発明の電圧波形とバルブから噴出するエアの圧力特性との関係を示すグラフ。
【図5】圧電式バルブの圧電素子に印加する本発明の電圧波形の他の例を示す図。
【図6】本発明の圧電式バルブを利用する光学式粒状物選別機の要部側断面図。
【図7】図6に示す粒状物選別機の制御ブロック図
【発明を実施するための形態】
【0024】
本発明の実施の形態について図面に基づいて説明する。
【0025】
<圧電式バルブ>
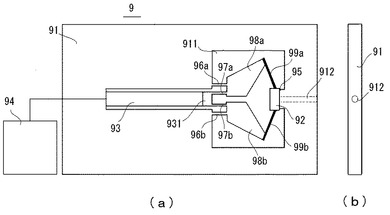
図1は圧電式バルブ9の概略説明図であって、(a)は閉弁時における側面図、(b)は正面図を示す。
圧電式バルブ9は、外部の圧縮気体供給源(図示せず)から圧縮気体の供給を受ける気体圧力室911、及び該気体圧力室911内の気体を外部に噴出する気体排出路912を有するバルブ本体91と、前記気体圧力室911内に配置され前記気体排出路912を開閉する弁体92と、前記バルブ本体91内に配置され当該バルブ本体91に一端が固定される圧電素子93と、前記気体圧力室911内に配置され前記圧電素子93の変位を拡大して前記弁体92に作用させる変位拡大機構と、前記圧電素子93に電圧を印加して前記弁体92を開閉駆動する駆動装置94と、を備え、前記気体排出路912の気体圧力室911側に突出して形成される弁座95に対し前記弁体92を離間又は着座させることで当該バルブの開閉を行うものである。
ここで、前記駆動装置94は圧電素子93に電圧を印加する駆動回路を備えるものであり、当該駆動回路が前記圧電素子と電気的に接続されるものであれはよく、例えば前記バルブ本体91等と物理的に一体とされる必要はない。
【0026】
前記変位拡大機構は、前記圧電素子93の長手方向軸線と気体排出路912とを結ぶ線(以下、「中心線」という。)に対し対称に一対設けられるものである。
第1変位拡大機構は、第1ヒンジ96a、第2ヒンジ97a、第1アーム部材98a及び第1板ばね99aで構成される。第1ヒンジ96aの一端はバルブ本体91に接合される。第2ヒンジ97aの一端は前記圧電素子93に取り付けられるキャップ部材931に接合される。第1ヒンジ96a及び第2ヒンジ97aの各他端は、第1アーム部材98aの基部に接合される。第1アーム部材98aは、弁体92の方向に向けて中心線から離れる方向に延びており、その先端部分に第1板ばね99aの一端が接合される。第1板ばね99aの他端は弁体92の一方側に接合される。
【0027】
一方、第2変位拡大機構は、第3ヒンジ96b、第4ヒンジ97b、第2アーム部材98b及び第2板ばね99bで構成される。第3ヒンジ96bの一端はバルブ本体91に接合される。第4ヒンジ97bの一端は前記圧電素子93に取り付けられるキャップ部材931に接合される。第3ヒンジ96b及び第4ヒンジ97bの各他端は、第2アーム部材98bの基部に接合される。第2アーム部材98bは、弁体92の方向に向けて中心線から離れる方向に延びており、その先端部分に第2板ばね99bの一端が接合される。第2板ばね99bの他端は弁体92の他方側に接合される。
【0028】
圧電式バルブ9は、図1(a)の状態において駆動装置94により圧電素子93に通電すると、当該圧電素子93が図面上右方向に伸長する。この伸長に伴い、第1変位拡大機構では、第2ヒンジ97aが力点、第1ヒンジ96aが支点、第1アーム部材98aの先端部が作用点として作用し、第1アーム部材98aの先端部には、前記圧電素子93の変位量がテコの原理により拡大されて現れる。同様に、第2変位拡大機構では、第4ヒンジ97bが力点、第3ヒンジ96bが支点、第2アーム部材98bの先端部が作用点として作用し、第2アーム部材98bの先端部には、前記圧電素子93の変位量が拡大されて現れる。
【0029】
そして、前記第1アーム部材98a及び第2アーム部材98bの各先端部を離間させる方向に拡大されて現れた変位は、第1板ばね99a及び第2板ばね99bを介して弁体92を弁座95から十分な距離離間させ、両者間に大きな間隙を生じさせる。これにより圧電式バルブ9は開弁され、十分な量の気体が気体圧力室911から気体排出路912を通して外部に噴出する。
【0030】
一方、圧電式バルブ9は、駆動装置94による上記圧電素子93への通電が解除されると該圧電素子93が収縮し、当該収縮が第1及び第2変位拡大機構を介して弁体92に伝達され、当該弁体92が弁座95に着座する。このとき、圧電式バルブ9は、第1板ばね99a及び第2板ばね99bのばねとしての復帰力も弁体92に有効に作用し、弁座95に対する弁体92の着座を確実にする。
【0031】
ここで、図1において、圧電式バルブ9は、気体圧力室911の側面が外部に開放された状態を例として説明したが、該気体圧力室911は密閉された状態で使用されることは言うまでもない。
【0032】
[比較例]
図2は、図1に示す圧電式バルブ9において、駆動装置94が圧電素子93に一定の電圧、即ち一段電圧を印加する従来例における電圧波形とバルブの気体排出路912から噴出するエアの圧力特性との関係のグラフを示す。(a)は電圧波形を、(b)は気体排出路912から噴出するエアの圧力特性を示す。ここでは、圧電式バルブ9に外部から供給する圧縮気体として圧縮空気を用いた。
【0033】
図2に示すグラフの実験条件は以下のとおりである。
(1)圧縮空気供給圧力:0.25MPa
(2)圧縮空気設定流量:50L/min
(3)通電時間:0.5〜2.0ms
(4)印加電圧:DC130V
(5)気体排出路内径:0.24mm
(6)圧力検出位置:気体排出路先端より2mmの位置
【0034】
図2において、通電時間0.5msにおける圧力特性は一つの明確なピークを示す。通電時間が0.8msになると圧力特性に二つ目のピークが現れ始め、通電時間1.0msでは圧力特性は明確な二つのピークを示す。通電時間が1.5msになると圧力特性に三つ目のピークが現れ、通電時間2.0msでは圧力特性は三つのピークを示す。
したがって、図2から、圧電素子93に一段電圧を印加した場合、通電時間が長くなると圧力特性に振幅を生じることが分かる。
【0035】
これは、圧電式バルブ9が、エアの噴風時間が長くなる場合、前記弁体92が振動して気体排出路912からのエアの噴出量が変動していることを示すものである。
【0036】
なお、図2において、閉弁後における圧力の若干の変動が見られるが、これは、閉弁時に弁座95に当接した弁体92がバウンドし、エア漏れが生じたものと考えられる。
【0037】
[実施例]
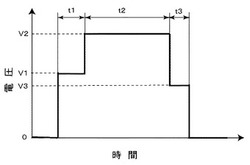
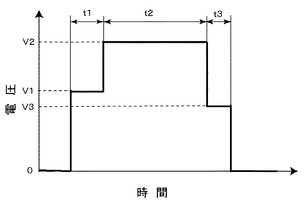
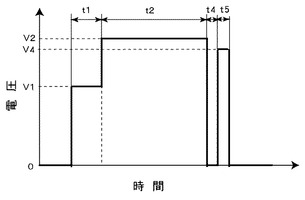
図3は、上記圧電式バルブの開弁動作において、駆動装置94により圧電素子93に印加する本発明の電圧波形の一例を示す。
図3に示すように、まず圧電素子93に対し、気体排出路912から十分な気体の噴出量が得られるよう一段目の電圧V1を印加し弁体2を開弁駆動する。そして、前記気体噴出量の変動を抑止するタイミング、即ち前記開弁に伴う反動で弁体92が振動するのを防ぐタイミング(一段目の電圧V1の印加から時間t1経過後)で、前記気体噴出量を維持するよう一段目の電圧V1よりも高い二段目の電圧V2を印加しその状態を時間t2維持する。
【0038】
一方、気体噴出時間(t1+t2)が経過した後、弁体92を閉弁駆動するが、図3に示す例では、その際に圧電素子93に印加する電圧を一気に解除するのでなく、一旦、二段目の電圧V2よりも低い三段目の電圧V3を印加する。そして、閉弁後における気体漏れを防止するタイミング、即ち閉弁時において弁体92が弁座95に当接する際の衝撃を緩和・吸収し当該弁体92のバウンドを防止するタイミング(三段目の電圧V3の印加から時間t3経過後)で前記圧電素子93に印加する電圧を解除する。
なお、上記各印加電圧の値V1,V2,V3及び時間t1,t3は、予め実験により求め駆動装置94に記憶させ設定しておけばよい。
【0039】
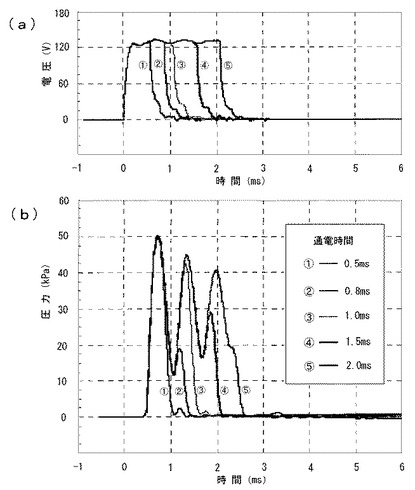
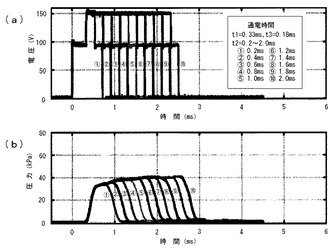
図4は、上記圧電式バルブ9において、駆動装置94が圧電素子93に図3に示す波形の電圧を印加する本発明例における電圧波形とバルブの空気排出路912から噴出するエアの圧力特性との関係のグラフを示す。(a)は電圧波形を、(b)は空気排出路912から噴出するエアの圧力特性を示す。ここで、圧電式バルブ9に外部から供給する圧縮気体として図2の例と同様に圧縮空気を用いた。
【0040】
図4に示すグラフの実験条件は以下のとおりである。
(1)圧縮空気供給圧力:0.25MPa
(2)圧縮空気設定流量:50L/min
(3)通電時間:0.71ms〜2.51ms(但し、一段目電圧V1の印加時間t1=0.33ms、三段目電圧V3の印加時間t3=0.18ms)
(4)印加電圧:一段目電圧V1=DC100V,二段目電圧V2=DC150V,三段目電圧V3=DC100V)
(5)気体排出路内径:0.24mm
(6)圧力検出位置:気体排出路先端より2mmの位置
【0041】
図4において、通電時間が長くなるほど最大圧力が少しずつ高くなる傾向は見られるが、図2で見られた圧力特性の振幅は完全に抑止されている。
したがって、図4から、開弁時に圧電素子93に二段階に電圧を印加した場合、通電時間が長くなっても圧力特性は略一定の安定した状態に維持されることが分かる。
【0042】
これは、上記一段目の電圧V1を、最低限必要なエアの噴風量が得られる値に低く設定したことで、開弁時の動作に伴う弁体92の反動を抑制したことに加え、当該弁体92が振動するのを防ぐタイミングで二段目の電圧V2を印加することで、一段目の電圧印加により発生する弁体92の振動を二段目の電圧印加による弁体92の動作で打ち消すことができ、安定したエアの噴風量が得られたことを示すものである。
【0043】
一方、図4において、図2で見られた閉弁後における圧力の変動は見られない。
これは、圧電素子93に印加する電圧を解除するに際し、一旦、中間電圧である三段目の電圧を印加し、弁座95に当接した弁体92のバウンドを防止するタイミングで電圧の印加を解除することで、当該弁体92の着座時の衝撃を緩和・吸収することができ、気体排出路912からのエア漏れを防止できたことを示すものである。
【0044】
図5は、駆動装置94によって圧電素子93に印加する本発明の電圧波形の変形例を示す。
図5に示す電圧波形は、図3に示すものと立ち下がり時の波形のみ異なるものであり、気体噴出時間(t1+t2)が経過した後、一旦、圧電素子93に印加する電圧を解除する。そして、閉弁後における空気漏れを防止するタイミング、即ち閉弁時において弁体92が弁座95に当接する際の衝撃を緩和・吸収し当該弁体92のバウンドを防止するタイミング(印加電圧の解除から時間t4経過後)で再びパルス状の電圧V4を時間t5印加する。
なお、上記各印加電圧の値V1,V2,V4及び時間t1,t4,t5も、予め実験により求め駆動装置94に記憶させ設定しておけばよい。
【0045】
<光学式粒状物選別機>
次に、本発明の圧電式バルブ9を利用する光学式粒状物選別機1について説明する。
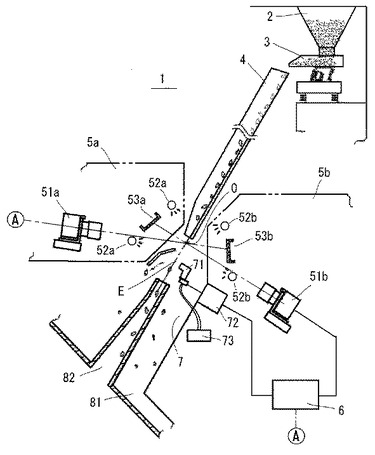
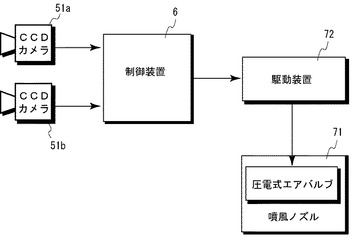
図6は、粒状物選別機1の内部構造を簡略化して示した要部側断面図を示す。図7は、粒状物選別機における制御ブロック図を示す。
粒状物選別機1は、上部にタンク2と振動フィーダ3とからなる粒状物供給部を有する。粒状物供給部の下方には所定幅を有する傾斜状シュート4が配置される。
粒状物供給部から供給された粒状物は、傾斜状シュート4を連続状に自然流下した後、その下端部から所定落下軌跡に沿って空中に放出される。
【0046】
所定の落下軌跡の前後には、落下軌跡に沿った検出位置Oにおいて粒状物を撮像する少なくとも一対の光学検出装置5a,5bが対向して配設される。各光学検出装置5a,5bは、それぞれCCDラインセンサを内蔵するCCDカメラ等の撮像手段51a,51b、蛍光灯等からなる照明手段52a,52b、及びバックグラウンド53a,53b等から構成される。
【0047】
また、前記検出位置Oの下方には、不良品等をエアの噴風により除去する噴風装置7が配設される。噴風装置7は、上記本発明の圧電式バルブを組み込んだ噴風ノズル71と、該噴風ノズル71に圧縮空気を送る圧縮空気供給装置73を備える。なお、前記圧電式バルブは圧電素子と電気的に接続される駆動回路を備える駆動装置72を一体としてなるものである。
【0048】
光学検出装置5a,5bは、落下軌跡に沿った検出位置OにおいてCCDカメラ等の撮像手段51a,51bにより粒状物を撮像し、当該撮像データを制御装置6に送る。制御装置6は、前記撮像データに基づいて不良品等の除去すべき粒状物を特定するとともに当該粒状物の大きさ等に関する情報を取得し、前記不良品等の排除信号を前記圧電式バルブを駆動する前記駆動装置72に送る。
【0049】
噴風装置7は、前記制御装置6から駆動装置72に送られる前記排除信号に基づいて、排除位置Eを通過する不良品等に対し前記噴風ノズル71からエアを噴風する。このとき、駆動装置72は、図3又は図5に示す波形の電圧を圧電式バルブの圧電素子に印加し、また、印加した電圧を解除することで、エアの噴風時間が長くなる場合でも、噴風ノズル71からエアを安定して供給することができる。なお、図3又は図5に示す電圧波形において、前記排除信号に基づいて変動する値は、基本的に除去すべき粒状物の大きさ等に関連する時間t2のみであり、他の各印加電圧の値V1〜V4及び時間t1,t3〜t5は予め実験により求め、駆動装置72に記憶させ設定しておけばよい。
【0050】
前記噴風ノズル71からの噴風により吹き飛ばされた不良品等は、不良品排出口81から機外に排出される。また、噴風により吹き飛ばされることなく所定の落下軌跡をそのまま通過した良品等は、良品排出口82から回収される。
【0051】
本発明の粒状物選別機において、選別対象となる粒状物は、代表的には穀物粒、特に白米であると言えるが、必ずしも穀物粒に限られるわけではなく、その対象物は、噴風によって吹き飛ばすことが可能な大きさと質量である限り何でも構わない。
【0052】
本発明の圧電式バルブの上記図3及び図5に示す電圧波形は、開弁時において圧電素子に二段階に電圧を印加するものであったが、気体排出路からの気体噴出量を安定させることができれば三段階以上の多段階に電圧を印加するものであってもよい。
また、上記図3に示す電圧波形は、立ち下がり時に三段目の電圧V3を印加するものであったが、圧電式バルブにおいて気体噴出時間中における安定した気体の供給を得るためには、該三段目の電圧の印加は必須のものではない。
【0053】
上記図3に示す電圧波形は、閉弁時に、三段目の電圧を印加した後、電圧印加を解除するものであったが、閉弁後の気体漏れを防止できるのであれば、さらに複数段階に分けて電圧を低下させてもよい。
【0054】
上記図3及び図5に示す電圧波形における各印加電圧の値V1〜V4及び時間t1,t3〜t5は気体噴出条件等により異なるが、気体排出路から噴出する気体の圧力特性を予め実験によって確認し最適な条件値を求め、駆動装置94に記憶させ設定しておくことで、気体の噴出時間が長くなる場合であっても、気体の噴出量が変動することがなく、該気体を安定して供給することができる。また、閉弁後における気体漏れも防止することができる。
【0055】
本発明の圧電式バルブを利用する粒状物選別機においては、例えば除去する対象の粒状物が大きく、エアの噴風時間が長くなる場合であっても、不良品等を確実に吹き飛ばすことができ、粒状物の安定した選別を行うことができる。
【0056】
上記本発明の圧電式バルブは、圧縮気体供給源から圧縮気体の供給を受ける気体圧力室、及び該気体圧力室内の気体を外部に噴出する気体排出路を有するバルブ本体と、前記気体圧力室内に配置され前記気体排出路を開閉する弁体と、前記バルブ本体内に配置され該バルブ本体に一端が固定される圧電素子と、前記気体圧力室内に配置され前記圧電素子の変位を拡大し前記弁体に作用させる変位拡大機構とを備えるものであれば、その構造は図1に示すものに限らない。
図1に示す圧電式バルブは、一対の変位拡大機構が対称に配置されるものであったが、変位拡大機構は非対称に配置されるものであってもよいし、一つのみ配置されるものであってもよい。また、図1に示す圧電式バルブは、弁体を板ばねの一端に設けるものであったが、弁体をアーム部材の一端部に設けるものであっても構わない。
【0057】
本発明は、上記実施の形態に限らず発明の範囲を逸脱しない限りにおいてその構成を適宜変更できることはいうまでもない。
【産業上の利用可能性】
【0058】
本発明の圧電式バルブは、気体の噴出時間が長くなる場合でも、該気体を安定して供給することができるものであり非常に利用価値の高いものである。
また、本発明の上記圧電式バルブを利用する光学式粒状物選別機は、不良品等を確実に吹き飛ばすことができ、粒状物の安定した選別を行うことができるため非常に有用なものである。
【符号の説明】
【0059】
1 光学式粒状物選別機
4 傾斜状シュート
5a,5b 光学検出装置
51a,51b CCDカメラ(撮像手段)
6 制御装置
7 噴風装置
71 噴風ノズル
72 駆動装置
73 圧縮空気供給装置
9 圧電式バルブ
91 バルブ本体
911 気体圧力室
912 気体排出路
92 弁体
93 圧電素子
94 駆動装置
95 弁座
96a,96b,97a,97b ヒンジ
98a,98b アーム部材
99a,99b 板ばね
【技術分野】
【0001】
本発明は、圧電素子の変位を利用してバルブの開閉を行う圧電式バルブ、及び前記圧電式バルブを利用して噴風により粒状物の不良品等を吹き飛ばし選別を行う光学式粒状物選別機に関する。
【背景技術】
【0002】
従来、穀粒や樹脂ペレット等の粒状物を噴風により吹き飛ばし良品と不良品に選別したり、粒状物に混入する異物等を噴風により除去したりする光学式粒状物選別機が知られている。
この種の粒状物選別機は、搬送路の端部から所定の軌跡に沿って落下する粒状物を不良品等の検出信号に基づいて噴風により吹き飛ばし除去することで、該粒状物の選別を行うものである。
【0003】
上記粒状物選別機は、連続的かつ大量に落下する粒状物の中から不良品等をエアの噴風により吹き飛ばすものであり、当該不良品等のみを他の粒状物を巻き込むことなく精度よく吹き飛ばすためには噴風ノズルに応答性のよいバルブを備えることが必要となる。
そこで、本件出願人は、先に圧電素子を利用してバルブの開閉を高速で行うことができる圧電式エアバルブを提案した(特許文献1参照。)。
【0004】
特許文献1に記載された圧電式エアバルブは、高速応答性能に優れる圧電素子の特性を利用するものであり、圧電素子の小さな変位をテコの原理に基づき拡大する変位拡大機構を備えるものである。
【0005】
当該圧電式エアバルブは、圧電素子に電圧を印加すると、当該圧電素子の伸長方向への変位が前記変位拡大機構を介して弁体に伝わり、該弁体を速やかに移動させて開弁するものである。
また、当該圧電式エアバルブは、圧電素子への電圧印加を解除すると、圧電素子の原状復帰に伴い当該復帰力が前記変位拡大機構を介して弁体に伝わり、該弁体を速やかに弁座に当接させて閉弁するものである。
【0006】
上記圧電式エアバルブを備える光学式粒状物選別機は、従来の電磁バルブに比べてバルブ開閉時における応答性に優れることから、不良品等を精度よく吹き飛ばしかつ前後の良品等を巻き込んで吹き飛ばすおそれの少ないものである。
【0007】
ところで、この種の粒状物選別機において、選別精度を向上させるため、粒状物の落下速度や大きさ等に対応してエアの噴風時間を変更することが行われている(特許文献2,3参照。)。
【0008】
ところが、上記圧電式エアバルブを備える光学式粒状物選別機は、該圧電式エアバルブが変位拡大機構を介して弁体を移動させるものであるため、エアの噴風時間が長くなる場合、前記弁体が振動してノズルからの噴風量が変動し、安定した選別作用を得られなくなるおそれがある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−316835号公報
【特許文献2】特開平11−179292号公報
【特許文献3】実開平6−41876号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
そこで、本発明は、気体の噴出時間が長くなる場合でも、該気体を安定して供給することができる圧電式バルブを提供することを目的とする。
また、本発明は、上記圧電式バルブを利用することで、不良品等を確実に吹き飛ばすことができ、粒状物の安定した選別作用を得ることができる光学式粒状物選別機を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するため、本発明は、外部から供給される圧縮気体を受け入れる気体圧力室及び該気体圧力室から前記圧縮気体を排出する気体排出路が形成されるバルブ本体と、前記気体圧力室に配置され前記気体排出路を開閉する弁体と、前記弁体の動作に必要な駆動力を変位として発生する圧電素子と、前記圧電素子の変位を拡大し前記弁体に作用させる少なくとも一つの変位拡大機構と、前記圧電素子に電圧を印加して前記弁体を開弁動作させ前記気体排出路を開放する駆動手段と、を備えてなる圧電式バルブにおいて、前記駆動手段は、開弁時における前記気体排出路からの気体噴出量の変動を抑止するよう前記圧電素子に対し多段階に電圧を印加することを特徴とするものである。
【0012】
本発明は、前記駆動手段が、前記弁体を開弁駆動する第一の電圧と、当該第一の電圧よりも高く開弁後の気体噴出量を維持する第二の電圧を、前記圧電素子に対し段階的に印加することが好ましい。
【0013】
本発明は、前記駆動手段が、第一の電圧値とその印加時間及び第二の電圧値を予め記憶し設定することが好ましい。
【0014】
本発明は、前記駆動手段が、閉弁後における前記気体排出路からの気体漏れを防止するよう前記圧電素子に印加する電圧を段階的に解除することが好ましい。
【0015】
本発明は、前記駆動手段が、前記圧電素子に印加する電圧を解除した後、閉弁後における前記気体排出路からの気体漏れを防止するようパルス状の電圧を印加することが好ましい。
【0016】
また、本発明は、被選別物を移送する移送手段と、該移送手段の端部から落下する被選別物を検出位置において検出する光学検出手段と、該光学検出手段のさらに下方に設けられ当該光学検出手段による検出結果に基づいて被選別物をエアの噴風により吹き飛ばす噴風手段とを備えてなる光学式粒状物選別機において、
前記噴風手段は、前記何れかの圧電式バルブを備え、前記光学検出手段による検出結果に基づいて前記圧電式バルブを駆動しエアを噴風することを特徴とするものである。
【発明の効果】
【0017】
本発明の圧電式バルブは、駆動手段が、開弁時における気体排出路からの気体噴出量の変動を抑止するよう圧電素子に対し多段階に電圧を印加するものであるので、気体噴出時間が長くなる場合であっても、気体を安定して供給することができる。
【0018】
本発明の圧電式バルブは、駆動手段が、弁体を開弁駆動する第一の電圧と、第一の電圧よりも高く開弁後の気体噴出量を維持する第二の電圧を、圧電素子に対し段階的に印加するものとすれば、開弁に伴い発生する弁体の振動を、第二の電圧の印加によって抑止することができ、気体噴出時間が長くなる場合であっても、気体を安定して供給することができる。
【0019】
本発明の圧電式バルブは、駆動手段が、第一の電圧値とその印加時間及び第二の電圧値を予め記憶し設定するものとすれば、開弁に伴い発生する弁体の振動を、第二の電圧の印加によって確実に抑止することができ、気体噴出時間が長くなる場合であっても、気体を安定して供給することができる。
【0020】
本発明の圧電式バルブは、駆動手段が、閉弁後における気体排出路からの気体漏れを防止するタイミングで圧電素子に印加する電圧を段階的に解除するものとすれば、弁体が着座する際の衝撃を吸収・緩和し、該弁体のバウンドを防止して閉弁後における気体排出路からの気体漏れを防止することができる。
【0021】
本発明の圧電式バルブは、駆動手段が、圧電素子に印加する電圧を解除した後、閉弁後における気体排出路からの気体漏れを防止するタイミングでパルス状の電圧を印加するものとすれば、弁体が着座する際の衝撃を吸収・緩和し、該弁体のバウンドを防止して閉弁後における気体排出路からの気体漏れを防止することができる。
【0022】
本発明の光学式粒状物選別機は、上記何れかの圧電式バルブを備えるものであれば、噴風時間が長くなる場合であっても、エアを安定して供給することができ、当該圧電式バルブの開閉時における応答性の良さと相俟って、前後の良品を巻き込むことなく不良品等を確実に吹き飛ばすことができ、粒状物の安定した選別を行うことができる。
【図面の簡単な説明】
【0023】
【図1】圧電式バルブの概略説明図。
【図2】図1の圧電式バルブにおいて、圧電素子に印加する従来例の電圧波形とバルブから噴出するエアの圧力特性との関係を示すグラフ。
【図3】圧電式バルブの圧電素子に印加する本発明の電圧波形の一例を示す図。
【図4】図1の圧電式バルブにおいて、圧電素子に印加する本発明の電圧波形とバルブから噴出するエアの圧力特性との関係を示すグラフ。
【図5】圧電式バルブの圧電素子に印加する本発明の電圧波形の他の例を示す図。
【図6】本発明の圧電式バルブを利用する光学式粒状物選別機の要部側断面図。
【図7】図6に示す粒状物選別機の制御ブロック図
【発明を実施するための形態】
【0024】
本発明の実施の形態について図面に基づいて説明する。
【0025】
<圧電式バルブ>
図1は圧電式バルブ9の概略説明図であって、(a)は閉弁時における側面図、(b)は正面図を示す。
圧電式バルブ9は、外部の圧縮気体供給源(図示せず)から圧縮気体の供給を受ける気体圧力室911、及び該気体圧力室911内の気体を外部に噴出する気体排出路912を有するバルブ本体91と、前記気体圧力室911内に配置され前記気体排出路912を開閉する弁体92と、前記バルブ本体91内に配置され当該バルブ本体91に一端が固定される圧電素子93と、前記気体圧力室911内に配置され前記圧電素子93の変位を拡大して前記弁体92に作用させる変位拡大機構と、前記圧電素子93に電圧を印加して前記弁体92を開閉駆動する駆動装置94と、を備え、前記気体排出路912の気体圧力室911側に突出して形成される弁座95に対し前記弁体92を離間又は着座させることで当該バルブの開閉を行うものである。
ここで、前記駆動装置94は圧電素子93に電圧を印加する駆動回路を備えるものであり、当該駆動回路が前記圧電素子と電気的に接続されるものであれはよく、例えば前記バルブ本体91等と物理的に一体とされる必要はない。
【0026】
前記変位拡大機構は、前記圧電素子93の長手方向軸線と気体排出路912とを結ぶ線(以下、「中心線」という。)に対し対称に一対設けられるものである。
第1変位拡大機構は、第1ヒンジ96a、第2ヒンジ97a、第1アーム部材98a及び第1板ばね99aで構成される。第1ヒンジ96aの一端はバルブ本体91に接合される。第2ヒンジ97aの一端は前記圧電素子93に取り付けられるキャップ部材931に接合される。第1ヒンジ96a及び第2ヒンジ97aの各他端は、第1アーム部材98aの基部に接合される。第1アーム部材98aは、弁体92の方向に向けて中心線から離れる方向に延びており、その先端部分に第1板ばね99aの一端が接合される。第1板ばね99aの他端は弁体92の一方側に接合される。
【0027】
一方、第2変位拡大機構は、第3ヒンジ96b、第4ヒンジ97b、第2アーム部材98b及び第2板ばね99bで構成される。第3ヒンジ96bの一端はバルブ本体91に接合される。第4ヒンジ97bの一端は前記圧電素子93に取り付けられるキャップ部材931に接合される。第3ヒンジ96b及び第4ヒンジ97bの各他端は、第2アーム部材98bの基部に接合される。第2アーム部材98bは、弁体92の方向に向けて中心線から離れる方向に延びており、その先端部分に第2板ばね99bの一端が接合される。第2板ばね99bの他端は弁体92の他方側に接合される。
【0028】
圧電式バルブ9は、図1(a)の状態において駆動装置94により圧電素子93に通電すると、当該圧電素子93が図面上右方向に伸長する。この伸長に伴い、第1変位拡大機構では、第2ヒンジ97aが力点、第1ヒンジ96aが支点、第1アーム部材98aの先端部が作用点として作用し、第1アーム部材98aの先端部には、前記圧電素子93の変位量がテコの原理により拡大されて現れる。同様に、第2変位拡大機構では、第4ヒンジ97bが力点、第3ヒンジ96bが支点、第2アーム部材98bの先端部が作用点として作用し、第2アーム部材98bの先端部には、前記圧電素子93の変位量が拡大されて現れる。
【0029】
そして、前記第1アーム部材98a及び第2アーム部材98bの各先端部を離間させる方向に拡大されて現れた変位は、第1板ばね99a及び第2板ばね99bを介して弁体92を弁座95から十分な距離離間させ、両者間に大きな間隙を生じさせる。これにより圧電式バルブ9は開弁され、十分な量の気体が気体圧力室911から気体排出路912を通して外部に噴出する。
【0030】
一方、圧電式バルブ9は、駆動装置94による上記圧電素子93への通電が解除されると該圧電素子93が収縮し、当該収縮が第1及び第2変位拡大機構を介して弁体92に伝達され、当該弁体92が弁座95に着座する。このとき、圧電式バルブ9は、第1板ばね99a及び第2板ばね99bのばねとしての復帰力も弁体92に有効に作用し、弁座95に対する弁体92の着座を確実にする。
【0031】
ここで、図1において、圧電式バルブ9は、気体圧力室911の側面が外部に開放された状態を例として説明したが、該気体圧力室911は密閉された状態で使用されることは言うまでもない。
【0032】
[比較例]
図2は、図1に示す圧電式バルブ9において、駆動装置94が圧電素子93に一定の電圧、即ち一段電圧を印加する従来例における電圧波形とバルブの気体排出路912から噴出するエアの圧力特性との関係のグラフを示す。(a)は電圧波形を、(b)は気体排出路912から噴出するエアの圧力特性を示す。ここでは、圧電式バルブ9に外部から供給する圧縮気体として圧縮空気を用いた。
【0033】
図2に示すグラフの実験条件は以下のとおりである。
(1)圧縮空気供給圧力:0.25MPa
(2)圧縮空気設定流量:50L/min
(3)通電時間:0.5〜2.0ms
(4)印加電圧:DC130V
(5)気体排出路内径:0.24mm
(6)圧力検出位置:気体排出路先端より2mmの位置
【0034】
図2において、通電時間0.5msにおける圧力特性は一つの明確なピークを示す。通電時間が0.8msになると圧力特性に二つ目のピークが現れ始め、通電時間1.0msでは圧力特性は明確な二つのピークを示す。通電時間が1.5msになると圧力特性に三つ目のピークが現れ、通電時間2.0msでは圧力特性は三つのピークを示す。
したがって、図2から、圧電素子93に一段電圧を印加した場合、通電時間が長くなると圧力特性に振幅を生じることが分かる。
【0035】
これは、圧電式バルブ9が、エアの噴風時間が長くなる場合、前記弁体92が振動して気体排出路912からのエアの噴出量が変動していることを示すものである。
【0036】
なお、図2において、閉弁後における圧力の若干の変動が見られるが、これは、閉弁時に弁座95に当接した弁体92がバウンドし、エア漏れが生じたものと考えられる。
【0037】
[実施例]
図3は、上記圧電式バルブの開弁動作において、駆動装置94により圧電素子93に印加する本発明の電圧波形の一例を示す。
図3に示すように、まず圧電素子93に対し、気体排出路912から十分な気体の噴出量が得られるよう一段目の電圧V1を印加し弁体2を開弁駆動する。そして、前記気体噴出量の変動を抑止するタイミング、即ち前記開弁に伴う反動で弁体92が振動するのを防ぐタイミング(一段目の電圧V1の印加から時間t1経過後)で、前記気体噴出量を維持するよう一段目の電圧V1よりも高い二段目の電圧V2を印加しその状態を時間t2維持する。
【0038】
一方、気体噴出時間(t1+t2)が経過した後、弁体92を閉弁駆動するが、図3に示す例では、その際に圧電素子93に印加する電圧を一気に解除するのでなく、一旦、二段目の電圧V2よりも低い三段目の電圧V3を印加する。そして、閉弁後における気体漏れを防止するタイミング、即ち閉弁時において弁体92が弁座95に当接する際の衝撃を緩和・吸収し当該弁体92のバウンドを防止するタイミング(三段目の電圧V3の印加から時間t3経過後)で前記圧電素子93に印加する電圧を解除する。
なお、上記各印加電圧の値V1,V2,V3及び時間t1,t3は、予め実験により求め駆動装置94に記憶させ設定しておけばよい。
【0039】
図4は、上記圧電式バルブ9において、駆動装置94が圧電素子93に図3に示す波形の電圧を印加する本発明例における電圧波形とバルブの空気排出路912から噴出するエアの圧力特性との関係のグラフを示す。(a)は電圧波形を、(b)は空気排出路912から噴出するエアの圧力特性を示す。ここで、圧電式バルブ9に外部から供給する圧縮気体として図2の例と同様に圧縮空気を用いた。
【0040】
図4に示すグラフの実験条件は以下のとおりである。
(1)圧縮空気供給圧力:0.25MPa
(2)圧縮空気設定流量:50L/min
(3)通電時間:0.71ms〜2.51ms(但し、一段目電圧V1の印加時間t1=0.33ms、三段目電圧V3の印加時間t3=0.18ms)
(4)印加電圧:一段目電圧V1=DC100V,二段目電圧V2=DC150V,三段目電圧V3=DC100V)
(5)気体排出路内径:0.24mm
(6)圧力検出位置:気体排出路先端より2mmの位置
【0041】
図4において、通電時間が長くなるほど最大圧力が少しずつ高くなる傾向は見られるが、図2で見られた圧力特性の振幅は完全に抑止されている。
したがって、図4から、開弁時に圧電素子93に二段階に電圧を印加した場合、通電時間が長くなっても圧力特性は略一定の安定した状態に維持されることが分かる。
【0042】
これは、上記一段目の電圧V1を、最低限必要なエアの噴風量が得られる値に低く設定したことで、開弁時の動作に伴う弁体92の反動を抑制したことに加え、当該弁体92が振動するのを防ぐタイミングで二段目の電圧V2を印加することで、一段目の電圧印加により発生する弁体92の振動を二段目の電圧印加による弁体92の動作で打ち消すことができ、安定したエアの噴風量が得られたことを示すものである。
【0043】
一方、図4において、図2で見られた閉弁後における圧力の変動は見られない。
これは、圧電素子93に印加する電圧を解除するに際し、一旦、中間電圧である三段目の電圧を印加し、弁座95に当接した弁体92のバウンドを防止するタイミングで電圧の印加を解除することで、当該弁体92の着座時の衝撃を緩和・吸収することができ、気体排出路912からのエア漏れを防止できたことを示すものである。
【0044】
図5は、駆動装置94によって圧電素子93に印加する本発明の電圧波形の変形例を示す。
図5に示す電圧波形は、図3に示すものと立ち下がり時の波形のみ異なるものであり、気体噴出時間(t1+t2)が経過した後、一旦、圧電素子93に印加する電圧を解除する。そして、閉弁後における空気漏れを防止するタイミング、即ち閉弁時において弁体92が弁座95に当接する際の衝撃を緩和・吸収し当該弁体92のバウンドを防止するタイミング(印加電圧の解除から時間t4経過後)で再びパルス状の電圧V4を時間t5印加する。
なお、上記各印加電圧の値V1,V2,V4及び時間t1,t4,t5も、予め実験により求め駆動装置94に記憶させ設定しておけばよい。
【0045】
<光学式粒状物選別機>
次に、本発明の圧電式バルブ9を利用する光学式粒状物選別機1について説明する。
図6は、粒状物選別機1の内部構造を簡略化して示した要部側断面図を示す。図7は、粒状物選別機における制御ブロック図を示す。
粒状物選別機1は、上部にタンク2と振動フィーダ3とからなる粒状物供給部を有する。粒状物供給部の下方には所定幅を有する傾斜状シュート4が配置される。
粒状物供給部から供給された粒状物は、傾斜状シュート4を連続状に自然流下した後、その下端部から所定落下軌跡に沿って空中に放出される。
【0046】
所定の落下軌跡の前後には、落下軌跡に沿った検出位置Oにおいて粒状物を撮像する少なくとも一対の光学検出装置5a,5bが対向して配設される。各光学検出装置5a,5bは、それぞれCCDラインセンサを内蔵するCCDカメラ等の撮像手段51a,51b、蛍光灯等からなる照明手段52a,52b、及びバックグラウンド53a,53b等から構成される。
【0047】
また、前記検出位置Oの下方には、不良品等をエアの噴風により除去する噴風装置7が配設される。噴風装置7は、上記本発明の圧電式バルブを組み込んだ噴風ノズル71と、該噴風ノズル71に圧縮空気を送る圧縮空気供給装置73を備える。なお、前記圧電式バルブは圧電素子と電気的に接続される駆動回路を備える駆動装置72を一体としてなるものである。
【0048】
光学検出装置5a,5bは、落下軌跡に沿った検出位置OにおいてCCDカメラ等の撮像手段51a,51bにより粒状物を撮像し、当該撮像データを制御装置6に送る。制御装置6は、前記撮像データに基づいて不良品等の除去すべき粒状物を特定するとともに当該粒状物の大きさ等に関する情報を取得し、前記不良品等の排除信号を前記圧電式バルブを駆動する前記駆動装置72に送る。
【0049】
噴風装置7は、前記制御装置6から駆動装置72に送られる前記排除信号に基づいて、排除位置Eを通過する不良品等に対し前記噴風ノズル71からエアを噴風する。このとき、駆動装置72は、図3又は図5に示す波形の電圧を圧電式バルブの圧電素子に印加し、また、印加した電圧を解除することで、エアの噴風時間が長くなる場合でも、噴風ノズル71からエアを安定して供給することができる。なお、図3又は図5に示す電圧波形において、前記排除信号に基づいて変動する値は、基本的に除去すべき粒状物の大きさ等に関連する時間t2のみであり、他の各印加電圧の値V1〜V4及び時間t1,t3〜t5は予め実験により求め、駆動装置72に記憶させ設定しておけばよい。
【0050】
前記噴風ノズル71からの噴風により吹き飛ばされた不良品等は、不良品排出口81から機外に排出される。また、噴風により吹き飛ばされることなく所定の落下軌跡をそのまま通過した良品等は、良品排出口82から回収される。
【0051】
本発明の粒状物選別機において、選別対象となる粒状物は、代表的には穀物粒、特に白米であると言えるが、必ずしも穀物粒に限られるわけではなく、その対象物は、噴風によって吹き飛ばすことが可能な大きさと質量である限り何でも構わない。
【0052】
本発明の圧電式バルブの上記図3及び図5に示す電圧波形は、開弁時において圧電素子に二段階に電圧を印加するものであったが、気体排出路からの気体噴出量を安定させることができれば三段階以上の多段階に電圧を印加するものであってもよい。
また、上記図3に示す電圧波形は、立ち下がり時に三段目の電圧V3を印加するものであったが、圧電式バルブにおいて気体噴出時間中における安定した気体の供給を得るためには、該三段目の電圧の印加は必須のものではない。
【0053】
上記図3に示す電圧波形は、閉弁時に、三段目の電圧を印加した後、電圧印加を解除するものであったが、閉弁後の気体漏れを防止できるのであれば、さらに複数段階に分けて電圧を低下させてもよい。
【0054】
上記図3及び図5に示す電圧波形における各印加電圧の値V1〜V4及び時間t1,t3〜t5は気体噴出条件等により異なるが、気体排出路から噴出する気体の圧力特性を予め実験によって確認し最適な条件値を求め、駆動装置94に記憶させ設定しておくことで、気体の噴出時間が長くなる場合であっても、気体の噴出量が変動することがなく、該気体を安定して供給することができる。また、閉弁後における気体漏れも防止することができる。
【0055】
本発明の圧電式バルブを利用する粒状物選別機においては、例えば除去する対象の粒状物が大きく、エアの噴風時間が長くなる場合であっても、不良品等を確実に吹き飛ばすことができ、粒状物の安定した選別を行うことができる。
【0056】
上記本発明の圧電式バルブは、圧縮気体供給源から圧縮気体の供給を受ける気体圧力室、及び該気体圧力室内の気体を外部に噴出する気体排出路を有するバルブ本体と、前記気体圧力室内に配置され前記気体排出路を開閉する弁体と、前記バルブ本体内に配置され該バルブ本体に一端が固定される圧電素子と、前記気体圧力室内に配置され前記圧電素子の変位を拡大し前記弁体に作用させる変位拡大機構とを備えるものであれば、その構造は図1に示すものに限らない。
図1に示す圧電式バルブは、一対の変位拡大機構が対称に配置されるものであったが、変位拡大機構は非対称に配置されるものであってもよいし、一つのみ配置されるものであってもよい。また、図1に示す圧電式バルブは、弁体を板ばねの一端に設けるものであったが、弁体をアーム部材の一端部に設けるものであっても構わない。
【0057】
本発明は、上記実施の形態に限らず発明の範囲を逸脱しない限りにおいてその構成を適宜変更できることはいうまでもない。
【産業上の利用可能性】
【0058】
本発明の圧電式バルブは、気体の噴出時間が長くなる場合でも、該気体を安定して供給することができるものであり非常に利用価値の高いものである。
また、本発明の上記圧電式バルブを利用する光学式粒状物選別機は、不良品等を確実に吹き飛ばすことができ、粒状物の安定した選別を行うことができるため非常に有用なものである。
【符号の説明】
【0059】
1 光学式粒状物選別機
4 傾斜状シュート
5a,5b 光学検出装置
51a,51b CCDカメラ(撮像手段)
6 制御装置
7 噴風装置
71 噴風ノズル
72 駆動装置
73 圧縮空気供給装置
9 圧電式バルブ
91 バルブ本体
911 気体圧力室
912 気体排出路
92 弁体
93 圧電素子
94 駆動装置
95 弁座
96a,96b,97a,97b ヒンジ
98a,98b アーム部材
99a,99b 板ばね
【特許請求の範囲】
【請求項1】
外部から供給される圧縮気体を受け入れる気体圧力室及び該気体圧力室から前記圧縮気体を排出する気体排出路が形成されるバルブ本体と、
前記気体圧力室に配置され前記気体排出路を開閉する弁体と、
前記弁体の動作に必要な駆動力を変位として発生する圧電素子と、
前記圧電素子の変位を拡大し前記弁体に作用させる少なくとも一つの変位拡大機構と、
前記圧電素子に電圧を印加して前記弁体を開弁動作させ前記気体排出路を開放する駆動手段と、を備えてなる圧電式バルブにおいて、
前記駆動手段は、開弁時における前記気体排出路からの気体噴出量の変動を抑止するよう前記圧電素子に対し多段階に電圧を印加することを特徴とする圧電式バルブ。
【請求項2】
前記駆動手段は、前記弁体を開弁駆動する第一の電圧と、当該第一の電圧よりも高く開弁後の気体噴出量を維持する第二の電圧を、前記圧電素子に対し段階的に印加する請求項1記載の圧電式バルブ。
【請求項3】
前記駆動手段は、前記第一の電圧値とその印加時間及び前記第二の電圧値を予め記憶し設定する請求項2記載の圧電式バルブ。
【請求項4】
前記駆動手段は、閉弁後における前記気体排出路からの気体漏れを防止するよう前記圧電素子に印加する電圧を段階的に解除する請求項1乃至3の何れか一項記載の圧電式バルブ。
【請求項5】
前記駆動手段は、前記圧電素子に印加する電圧を解除した後、閉弁後における前記気体排出路からの気体漏れを防止するようパルス状の電圧を印加する請求項1乃至3の何れか一項記載の圧電式バルブ。
【請求項6】
被選別物を移動する移送手段と、該移送手段の端部から落下する被選別物を検出位置において検出する光学検出手段と、該光学検出手段のさらに下方に設けられ当該光学検出手段による検出結果に基づいて被選別物をエアの噴風により吹き飛ばす噴風手段とを備えてなる光学式粒状物選別機において、
前記噴風手段は、請求項1乃至5の何れかに記載の圧電式バルブを備え、前記光学検出手段による検出結果に基づいて前記圧電式バルブを駆動しエアを噴風することを特徴とする光学式粒状物選別機。
【請求項1】
外部から供給される圧縮気体を受け入れる気体圧力室及び該気体圧力室から前記圧縮気体を排出する気体排出路が形成されるバルブ本体と、
前記気体圧力室に配置され前記気体排出路を開閉する弁体と、
前記弁体の動作に必要な駆動力を変位として発生する圧電素子と、
前記圧電素子の変位を拡大し前記弁体に作用させる少なくとも一つの変位拡大機構と、
前記圧電素子に電圧を印加して前記弁体を開弁動作させ前記気体排出路を開放する駆動手段と、を備えてなる圧電式バルブにおいて、
前記駆動手段は、開弁時における前記気体排出路からの気体噴出量の変動を抑止するよう前記圧電素子に対し多段階に電圧を印加することを特徴とする圧電式バルブ。
【請求項2】
前記駆動手段は、前記弁体を開弁駆動する第一の電圧と、当該第一の電圧よりも高く開弁後の気体噴出量を維持する第二の電圧を、前記圧電素子に対し段階的に印加する請求項1記載の圧電式バルブ。
【請求項3】
前記駆動手段は、前記第一の電圧値とその印加時間及び前記第二の電圧値を予め記憶し設定する請求項2記載の圧電式バルブ。
【請求項4】
前記駆動手段は、閉弁後における前記気体排出路からの気体漏れを防止するよう前記圧電素子に印加する電圧を段階的に解除する請求項1乃至3の何れか一項記載の圧電式バルブ。
【請求項5】
前記駆動手段は、前記圧電素子に印加する電圧を解除した後、閉弁後における前記気体排出路からの気体漏れを防止するようパルス状の電圧を印加する請求項1乃至3の何れか一項記載の圧電式バルブ。
【請求項6】
被選別物を移動する移送手段と、該移送手段の端部から落下する被選別物を検出位置において検出する光学検出手段と、該光学検出手段のさらに下方に設けられ当該光学検出手段による検出結果に基づいて被選別物をエアの噴風により吹き飛ばす噴風手段とを備えてなる光学式粒状物選別機において、
前記噴風手段は、請求項1乃至5の何れかに記載の圧電式バルブを備え、前記光学検出手段による検出結果に基づいて前記圧電式バルブを駆動しエアを噴風することを特徴とする光学式粒状物選別機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−241961(P2011−241961A)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2010−117004(P2010−117004)
【出願日】平成22年5月21日(2010.5.21)
【出願人】(000001812)株式会社サタケ (223)
【出願人】(502254796)有限会社メカノトランスフォーマ (22)
【Fターム(参考)】
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成22年5月21日(2010.5.21)
【出願人】(000001812)株式会社サタケ (223)
【出願人】(502254796)有限会社メカノトランスフォーマ (22)
【Fターム(参考)】
[ Back to top ]