
圧電振動板の周波数測定装置
【課題】 生産性に優れ、かつ測定における信頼性の高い圧電振動板の周波数測定装置を提供する。
【解決手段】 圧電振動板の周波数測定装置は、上電極体43と、上電極体43と一体的に動作する接触体44と、上電極体43に対向する下電極体37と、下電極体を保持する緩衝体44とを有している。上電極体43を下電極体37に向かって近接させると、まず前記接触体44,45、46が下電極体に接触する。ここで下電極体37の表面に傾きが生じていた場合、まずいずれか一方の接触体が下電極体に接触し、最終的に接触体の接触面44aと45aと46aが下電極体37に接触し、当該各接触面で形成される平面に追随するかたち緩衝体が変形して、上電極体43と下電極体37が所定間隔のギャップをもって平行に対向する。この対向状態で両電極体間に所定周波数の電圧を印加することにより、エアギャップ方式で水晶振動板Qの周波数の測定を行う。
【解決手段】 圧電振動板の周波数測定装置は、上電極体43と、上電極体43と一体的に動作する接触体44と、上電極体43に対向する下電極体37と、下電極体を保持する緩衝体44とを有している。上電極体43を下電極体37に向かって近接させると、まず前記接触体44,45、46が下電極体に接触する。ここで下電極体37の表面に傾きが生じていた場合、まずいずれか一方の接触体が下電極体に接触し、最終的に接触体の接触面44aと45aと46aが下電極体37に接触し、当該各接触面で形成される平面に追随するかたち緩衝体が変形して、上電極体43と下電極体37が所定間隔のギャップをもって平行に対向する。この対向状態で両電極体間に所定周波数の電圧を印加することにより、エアギャップ方式で水晶振動板Qの周波数の測定を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はATカット水晶振動板等の圧電振動板の周波数分類装置に関するものである。
【背景技術】
【0002】
例えば、ATカット水晶振動板は、その厚さに周波数が依存することが知られており、所定の厚さに平面研磨することにより所望の周波数を得ている。しかしながら製造ばらつきによりその厚さすなわち周波数がばらつくことは実務上不可避であり、励振電極形成工程前に素板状態での周波数を測定し、周波数帯毎にグループ化し、そしてグループ毎に励振電極形成量(厚さ)を決定することが行われていた。
【0003】
素板状態での周波数測定は、例えば特開平11−142456号(特許文献1)に示すように、下部電極(下電極体)上に載せた圧電共振子に対し上部電極(上電極体)を非接触で近接させエアギャップ方式にて測定を行うことが知られている。このような測定はギャップ(近接距離)によってもその精度が異なってくるので、適切なギャップを設定することが重要であり、特許文献1においては上部電極の上部に設けられたマイクロメータにより上部電極を手動にて上下動させギャップを調整していた。
【0004】
具体的にはマイクロメータを装備した周波数測定装置を用い、インデックステーブル上に形成された下電極体に搭載された圧電振動板に対して上電極体を近接させ、所定のギャップLを有した状態で周波数測定を行う。ギャップの調整は事前に装置上部に設けられたマイクロメータにより行っていた。
【0005】
ところでこのような調整方法は上部電極と下部電極が一対で構成しているときは最初の設定で上部電極の下降位置を決定することによりギャップの調整が可能である。しかしながら、例えばインデックステーブルに複数の下部電極が設けられた構成のように、1つの上部電極に対し複数の下部電極が可動状態で対応する構成においては、下部電極の高さばらつきが考えられるので上部電極の降下位置を特定することが困難であった。また下部電極はその上面が傾斜している場合があり、このような場合正確な周波数測定ができないことがあった。
【特許文献1】特開平11−142456号
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は上記問題点を解決するためになされたもので、生産性に優れ、かつ測定における信頼性の高い圧電振動板の周波数測定装置を提供することを目的とするものである。
【課題を解決するための手段】
【0007】
本発明は、下電極体が緩衝体に保持されるとともに当該下電極体に複数領域で接触する接触体を有するものであり、具体的には下電極体上に圧電振動板を搭載し、前記圧電振動板に対して上電極体を近接させた状態で圧電振動板の周波数を測定する圧電振動板の周波数測定装置であって、前記下電極体は緩衝体に保持されるとともに上面に平面を有し、前記上電極体は圧電振動板との近接面を有し、また前記上電極体と一体的に動作し、前記下電極体に複数領域で接触する接触体を有し、かつ前記各接触体の下電極体への接触面は同一の高さに設定されるとともに、前記接触面は前記近接面より下電極体に近い位置に配置されていることを特徴としている。
【0008】
上記緩衝体は柔軟な材料または弾性を有する材料からなる。これに対して上記下電極体は変形の少ない固体を用いており、また下電極体の圧電振動板搭載面は平面を有している。また前記接触体は金属等の固体からなり、下電極面の表面に接触し当該表面に押圧力をかける、突き当てを行うものである。従って接触体の突き当てにより下電極体の平面に力が加わった場合、緩衝体が変形し当該緩衝体の変形に追随するかたちで下電極体の上面の傾きを自在に変えることができる。また上電極体と一体的に動作する複数の接触体は上電極体と直接接続してもよいし、間接的に接続され、一体的に動作する構成でもよい。接触体は下電極体に複数領域で接触する構成であり、複数の接触面を有する構成でもよいし、枠状の一体構成とし、下電極体に広い面積で接触する構成としてもよい。
【0009】
本発明によれば、前記下電極体は緩衝体に保持されるとともに上面に平面を有し、前記上電極体は圧電振動板との近接面を有し、また前記上電極体と一体的に動作し、前記下電極体に複数領域で接触する接触体を有し、かつ前記各接触体の下電極体への接触面は同一の高さに設定されるとともに、前記接触面は前記近接面より下電極体に近い位置に配置されている構成であるので、接触体が下電極体に接触することになり、上電極体の近接面と下電極体の表面の距離(ギャップ)を一定に保つことができる。また下電極体が緩衝体で保持されているので、下電極体の圧電振動板の搭載面に傾きがあったとしても下電極体が複数領域で接触する接触体により、当該傾きが是正され、上電極体の近接面と下電極体の上面の距離(ギャップ)を一定に保つことができる。
【0010】
前記接触体は下電極体に複数領域で接触することが必要であり、この場合当該接触体は前記上電極体の周囲に相互に離間して配置される。特に前記接触体は3体構成であり、上電極体の周囲に配置されていることを特徴とする構成であってもよい。この場合、前記3体構成の接触体を上電極体の周囲に等間隔で配置すると安定した傾き補正を行うことができる。また接触体を4体以上で構成すると下電極体の傾きを高精度に是正することができる。
【発明の効果】
【0011】
本発明によれば、生産性に優れ、かつ測定における信頼性の高い圧電振動板の周波数測定装置を得ることができる。
【図面の簡単な説明】
【0012】
【図1】本実施の形態に係る製造装置の概略構成図
【図2】本発明による実施の形態を示す図1のA−A断面図
【図3】本発明による周波数測定部の斜視図
【図4】本発明による周波数測定部の他の例を示す斜視図
【図5】本発明による下電極体の構成の他の例を示す図
【図6】本発明による下電極体の構成の他の例を示す図
【図7】本発明による下電極体の構成の他の例を示す図
【発明を実施するための最良の形態】
【0013】
以下、本発明による好ましい実施の形態について図面に基づいて説明する。
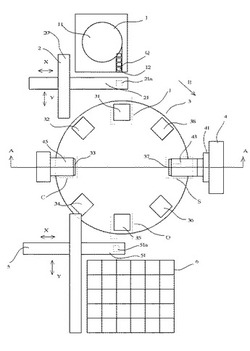
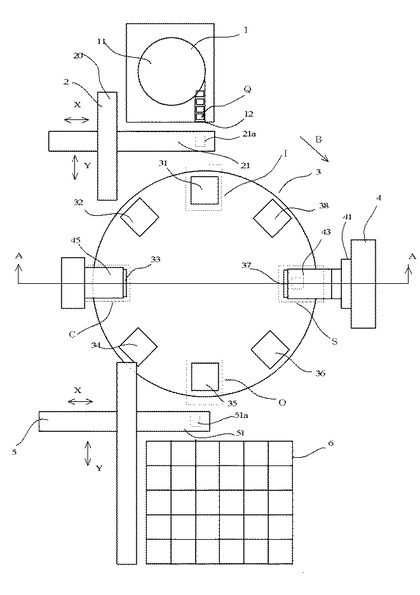
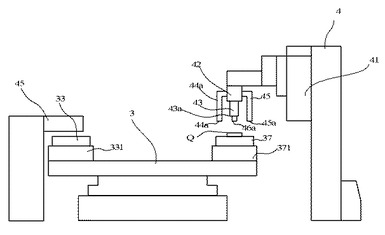
本発明の実施の形態について、圧電振動板としてATカット水晶振動板の測定方法を例にとり図面とともに説明する。図1は本実施の形態に係る製造装置の概略構成図であり、図2は本発明による実施の形態を示す図1のA−A断面図、図3は本発明による周波数測定部の斜視図である。
【0014】
図1において1はパーツフィーダ、2は第1の移載装置、3はインデックステーブル(基台)、4は周波数測定部、5は第2の移載装置、6は収納箱、Qは水晶振動板(圧電振動板)である。
【0015】
水晶振動板Qは平行平面研磨により薄板に加工された矩形状のATカット水晶振動板であり、パーツフィーダ1により個別に供給される。
【0016】
パーツフィーダ1は投入された多数個の水晶振動板Qを整列して排出口12へ供給する装置であり、すり鉢状の容器11にらせん状の流路を形成し(図示せず)、容器11に微小振動を与えることにより、ランダムに投入された水晶振動板Qが排出口12に順次押し出される構成である。なお、パーツフィーダに代えて例えばマトリクス状の水晶振動板収納室を有するパレットからインデックステーブルに供給する方式であってもよい。また、複数の水晶振動板を平板状でランダムに配置し、画像認識技術を用いて個別に水晶振動板をピックアップしてインデックステーブルに供給する方式であってもよい。
【0017】
パーツフィーダの排出口12に送られた水晶振動板Qは第1の移載装置2により取り出される。第1の移載装置2は基体20に対して平面視直角の方向に伸長する位置にアーム21が取着され、当該アーム2は基体20に対して直角方向(X方向)と基体に沿う方向(Y方向)に動作するとともに、上下方向(Z方向)にも動作し、3次元的な動作が可能となっている。アーム21は図示しない電動アクチュエータにより動作し、当該電動アクチュエータは図示しない制御部の指令により動作する。アーム21の先端部分には水晶振動板Qを吸引する吸引口21aが形成されている。当該吸引機構は例えば負圧のエアを供給または停止することにより、吸引または吸引解除を行う。なお、第1の移載装置において、水晶振動板Qをピックアップする方法は前述の吸引による方法のみならず、例えば水晶振動板の外周を把持するチャッキングであってもよい。これは第2の移載装置においても同様である。
【0018】
水晶振動板Qが第1の移載装置によって移載されるインデックステーブル3は平面で見て円板形状であり、本発明の基台に相当する。インデックステーブル表面の外周領域には下電極体31,32,33,34,35,36,37,38が所定の等間隔を保って全周に渡って設けられている。当該下電極体は矩形状の導電セラミックスからなり、その上面はインデックステーブル上面とほぼ平行な平面を有している。また各下電極体は絶縁材からなる緩衝体を介してインデックステーブルに固定されており、各々電気的に独立した状態で通電可能となっている。なお下電極体で用いる導電セラミックスは金属に較べて耐摩耗性に優れ、硬質な水晶による摩耗を防ぐことができ、また金属と同様、上部面をポリッシュ加工することにより、平行で平滑な平面を得ることができる。なお、下電極体の材料を導電セラミックスに代えて金属材等の導電材料を用いてもよい。
【0019】
下電極体31,32,33,34,35,36,37,38の下部には各々緩衝体31a,32a,33a,34a,35a,36a,37a,38aが配置されている。具体的には図2に示すように下電極体37の下部には緩衝体371が密着して設けられ、また下電極体33の下部には緩衝体331が密着して設けられている。下電極体と緩衝体の密着は接着剤を用いた接着や、ネジやリベットを用いた結合をあげることができる。本実施の形態ではネジを用いて密着している。このような構成により下電極体は図3の矢印で示すように、上下方向に動作可能となっている。
【0020】
なお、上記実施の形態において各緩衝体は下電極体より面積が大きく構成され、平面視で外周の一部がはみ出た構成となっているが、これに限定されるものではなく緩衝体が下電極体より小さい構成であってもよく、また下電極体の底面を複数の緩衝体で保持する構成であってもよい。なお、図示していないが下電極体の水晶振動板Qの搭載領域には小径のエア流通孔が形成されている。当該エア流通孔により水晶振動板を下電極体に搭載した際の吸引保持を行っている。
【0021】
また本実施の形態において緩衝体はウレタンゴムを用いている。ウレタンゴムは柔軟でかつ弾性のある材料であり、下電極体の表面に力が加わった場合、下電極の表面の傾きを自在に変えることができる。またウレタンゴムに代えてシリコンゴムやゲルシート等の材料を用いてもよい。
【0022】
また当該インデックステーブル3において、パーツフィーダから移載される場所は供給ステーションIとなり、また供給ステーションIの対面には排出ステーションOが形成されている。また周波数測定部4の配置位置は測定ステーションSとなる。
【0023】
ところでインデックステーブル3は平面的に回転駆動可能となっており、当該回転は例えばサーボモータで駆動される。サーボモータはインデックステーブル駆動制御部からのパルス信号で駆動し、回転速度、回転量等を制御するが、これによりインデックステーブル3を任意の設定で動作させることができる。本実施の形態においては、各下電極体を均等な間隔を持って8つ設けているので、周波数測定実行時には45度づつ間欠的に回転を行う。この回転量は周波数測定以外の必要な製造工数がある場合等によって任意に設定することができ、サーボモータへの制御信号により調整することができる。もちろん下電極体を90度毎にインデックステーブルに配置した4つの構成であってもよく、この場合は90度毎の回転量となる。
【0024】
このようなインデックステーブル3には供給ステーションIから時計回りに90度回転したところに、周波数測定部4が配置され、また排出ステーションOから時計回りに90度回転したところに、排出確認部45が配置された確認ステーションCが設けられている。
【0025】
周波数測定部4は電動アクチュエータ41と電動アクチュエータ41によって上下動する絶縁体42と上電極体43とを有する。上部電極体43は例えば銅、真鍮、SK材等からなる導電性の良好な材料が用いられ、また全体として円柱形状であり鉛直方向に伸長する構成である。上電極体43は下電極体上面との対向面、すなわち圧電振動板Qとの近接面43aを有しており、当該近接面43aは下電極体上面と平行な平面を有している。上電極体43は下電極体とともに適切なギャップが構成され、下電極体の上面に圧電振動板を配置することにより、エアギャップ方式にて圧電振動板の周波数を測定する。
【0026】
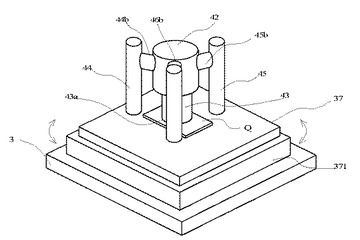
絶縁体42は円柱形状であり、また絶縁体42の側面には導電体からなる連結部44b、45b、46bの一端が接合されており、これら連結部44b、45b、46bは相互に離間する方向に伸長している。当該連結部44b、45b、46bの他端には接触体44,45,46が接合されている。これにより連結部と接触体は電気的に接続されている。接触体44,45,46は円柱形状の金属材からなり、上電極体の伸長する方向に平行に伸びており、その最下面は接触面44a,45a,46aを有している。接触面44a,45a,46aは平面であり、相互に同一の高さに設定されている。なお、接触体の材料は金属材に代えて、樹脂材やセラミック材であってもよい。いずれの材料においても耐摩耗性の高い材質を用いることが好ましい。なお、図示していないが、絶縁体42の内部においては上電極体と接触体につながった連結体が電気的に独立した状態で保持され、それぞれの端子がネットワークアナライザに接続されている。
【0027】
図2および図3に示すように、前記接触体の接触面44a,45a,46aは上電極体の近接面43aより低い位置、すなわち下電極体に近い位置に配置されている。また接触面44a,45a,46aは上電極体が近接する圧電振動板よりも外側に位置し、接触面44a,45a,46aが下電極体37の表面に接触することにより、前記近接面43aは圧電振動板Qに近接し、この状態で電圧を引加し周波数を測定する。
【0028】
上記から明らかなとおり前記接触面と前記近接面の高さの差が上電極体と下電極体の間隔(ギャップ)となる。当該間隔は基本的には一定であるが、測定する圧電振動板の厚さによって調整されることがある。
【0029】
電動アクチュエータ41は外部からの制御信号により所定量の動作を行う構成であり、例えばステッピングモータによる回転運動をボールねじとカップリングにより直線運動させる構成や、あるいはサーボモーターとエンコーダとボールねじとカップリングによる構成や、あるいは圧電素子を用いた超音波モータにより所定量の動作を行わせる構成をあげることができる。本実施の形態ではステッピングモータとボールねじとカップリングによるアクチュエータを用いており、上電極体43は電動アクチュエータ41により高速かつ高精度に上下動作する。なお、ステッピングモータを用いた場合は、オープンループ型で一方通行的な制御になるが、近年はモータの基本ステップ角の小さいものを採用したり、脱調レス機能を付加すること等により、精度を向上させることができる。またサーボモータを用いた場合は、クローズドループ型での回転位置を検出するエンコーダを高分解能なものにすることにより、より高精度の位置決めを行うことができる。
【0030】
第2の移載装置5はインデックステーブル3の排出ステーションOに送られた水晶振動子Qを収納箱に移載する機能を有している。当該第2の移載装置も第1の移載装置と同じく、基本的にはアーム51の先端部分には水晶振動板Qを吸引する吸引口51aが形成されており、当該吸引機構は例えば負圧のエアを供給または停止することにより、吸引または吸引解除を行う。当該アーム51は基体50に対して直角方向(X方向)と基体に沿う方向(Y方向)に動作するとともに、上下方向(Z方向)にも動作し、3次元的な動作が可能となっている。これにより排出ステーションOにある水晶振動板Qをアーム51の吸引口51aにより吸引し、上部方向へ移動後、XY方向に移動し、さらに下方向に移動して吸引を解除し収納箱6の所定の場所に移載する。
【0031】
収納箱6は樹脂または金属からなり、周波数測定後の水晶振動板Qを収納するポケットをマトリクス状に有する構成である。本実施の形態においては各ポケットが所定の周波数帯毎に分けられており、前述の周波数測定結果に応じて所定のポケットに水晶振動板Qを収納する。従って、測定の結果同じ周波数帯の水晶振動板は同じポケットに収納されることになる。
【0032】
なお、水晶振動板をマトリクス状のポケットに測定順に順次1枚ずつ収納してもよい。この場合、収納箱のポケットの位置で水晶振動板の周波数を特定できるので、ポケットの位置データと周波数データを次工程が引き継ぐことにより、水晶振動板に対し個別に電極形成等の加工を行う際に有効である。
【0033】
排出確認部45は、確認ステーションCの工程部分に設けられ、排出ステーションOにより下電極体上面から排出されなかった水晶振動板Qを吸引チューブバルブにより強制的に排出する。
【0034】
次に本装置を用いて水晶振動板Qの周波数を測定し、その測定結果に基づいて所定の周波数に分類する動作例について図1乃至図3を参照して説明する。
【0035】
最初に水晶振動板Qの周波数測定作業を行う。まずパーツフィーダ1には多数個の水晶振動板Qを投入し、これによりパーツフィーダ1の搬送動作により排出口12に順次水晶振動板Qが送られる。第1の移載装置2は第1の移載制御部72の指令により、アーム21により排出口にある水晶振動板Qを吸引し、搭載ステーションに位置する下電極体31の上面に順次移載する。
【0036】
インデックステーブル3はインデックステーブル駆動制御部74の指示により、サーボモータが駆動し、時計回りである矢印B方向に間欠的な回転動作が行われる。インデックステーブル3が間欠的に回転することにより、次の下電極体32が搭載ステーションに位置すると順次下電極体に水晶振動板Qが移載される。
【0037】
下電極体31に搭載された水晶振動板Qが搭載ステーションから2段階間欠回転すると測定ステーションSに移動する。当該測定ステーションSでは、周波数測定部が設置され、図示しない制御部の指示により、上電極体が下電極体に近接する。この近接あるいは離間動作は制御部からの命令により電動アクチュエータが動作することにより行われる。
【0038】
上電極体43を下電極体37に向かって近接させると、まず前記接触体44,45、46が下電極体に接触する。ここで下電極体37の表面に傾きが生じていた場合、まずいずれか一方の接触体が下電極体に接触する。例えば接触体44が先に下電極体37に接触したとすると、当該接触体44の押圧力によって前記緩衝体371が変形し、接触体44側の下電極体3が下降する。そして最終的に接触体の接触面44aと45aと46aが下電極体37に接触し、当該各接触面で形成される平面に追随するかたち緩衝体が変形して、上電極体43と下電極体37が所定間隔のギャップをもって平行に対向する。また水晶振動板Qが当該ギャップ間に上電極体とは非接触で配置される。上記所定間隔のギャップは前記接触体の接触面と前記上電極体の近接面との高低差に相当する。当該接触体の下電極体への接触により両者が導通し、電気的には上電極体と下電極体で対向する構成となる。
【0039】
この非接触の対向状態で両電極体間に所定周波数の電圧を印加することにより、エアギャップ方式で水晶振動板Qの周波数の測定を行う。当該周波数の測定においては上電極体と下電極体間に前述のネットワークアナライザからの複数の周波数信号を印加し、そのゲインを取得して周波数の測定を行っている。測定された周波数データは中央制御部を介してメモリに転送され、周波数毎に定められた収納箱6のポケット位置が決定される。
【0040】
水晶振動板Qが測定ステーションSからさらに2段階間欠回転すると排出ステーションOに移動する。排出ステーションOにおいては第2の移載装置により下電極体上面の水晶振動板Qが収納箱に移載される。この第2の移載装置は中央制御部からの周波数測定データに基づいて第2移載制御部の指令により動作し、下電極体上面にある水晶振動板をアーム51により吸引し、3次元動作により、収納箱の周波数帯毎に定められたポケットに移載される。なお、収納箱が平面的に移動することにより、移載するポケットを特定する構成であってもよい。
【0041】
この後インデックステーブル3は順次回転し、下電極体31が確認ステーションCに移動した際に排出確認部45により、当該下電極体に残っている水晶振動板Qがあれば吸引チューブバルブにより強制的に排出される。
【0042】
このような一連の動作をパーツフィーダ1から供給された水晶振動板Qについて順次行うことにより、水晶振動板の周波数測定と周波数分類を進める。
【0043】
上記実施の形態において、1つの下電極体に複数の水晶振動板(圧電振動板)を搭載してもよい。例えば1つの下電極体に2つの水晶振動板を所定の間隔をもって並列に並べて搭載し、周波数測定時には各々の水晶振動板に上電極体を順次近接させ、周波数測定を行う。従って、下電極体を次のステージに移動させるときはインデックステーブルの回転量を大きくし、下電極体に並列された隣接する水晶振動板を移動させる場合は、インデックステーブルの回転量を微少にする。
【0044】
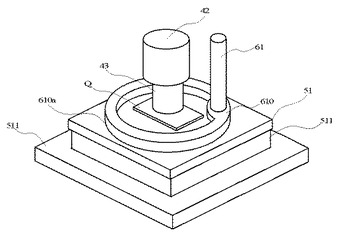
本発明による実施形態における各変形例を図4乃至図7とともに説明する。図4は第1の変形例を示す斜視図である。基本構成は第1の実施の形態と同様の構成であるが、接触体と緩衝体の構成が異なっている。基台5上に緩衝体511が設定され、当該緩衝体511上に下電極体51が搭載されている。本変形例では平面で見て緩衝体511のサイズが下電極体51のサイズより小さく構成されている。これにより上電極体の押圧力による緩衝体の変形がスムーズになり、下電極体の傾き補正が容易となる。
【0045】
上電極体43と一体的に動作する接触体61はその下端部分に接触枠610が形成されている。当該接触枠610は円形の枠部を有し、周波数測定時には枠内に水晶振動板が配置される構成となる。接触枠610の下電極体51と対向する面には接触面610aが形成され、当該接触面610aは同一平面の平坦な構成である。
【0046】
下電極体51が傾いている場合には、前記接触面610aのいずれかの領域が下電極体に接触し、その押圧力により緩衝体511が変形し、接触面610aの他の領域も下電極体に接触し、最終的に接触面610aと下電極体51の上面が複数の領域にて接触する面接触によって上電極体43と下電極体51のギャップが適正に形成される。
【0047】
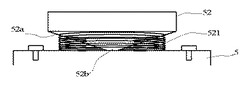
次に図5に示す第2の変形例について説明する。基本構成は第1の実施の形態と同様の構成であるが、下電極体と緩衝体の構成が異なっている。下電極体52はその下面がテーパ部52aとその中央部に突起部52bが形成された錐形の構成である。緩衝体521はコイルバネであり、前記テーパ部52aの斜面に対応してコイルバネが配置されている。コイルバネからなる緩衝体により下電極体に対する接触体の押圧力に遅滞なく追随し、下電極体の傾き補正をレスポンス良く行うことができる。
【0048】
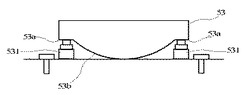
次に図6に示す第3の変形例について説明する。基本構成は第1の実施の形態と同様の構成であるが、下電極体と緩衝体の構成が異なっている。下電極体53はその下面において外周縁部に周状に形成された平坦な支持部53aを有しており、その内側は球面状の曲率部53bを有する構成である。また支持部53aは緩衝体531により支持されている。緩衝体531は例えばダンパーやショックアブソーバー等の減衰装置であり、上電極体の押圧力により抵抗を持って収縮し、また押圧力が無くなると無負荷の初期状態に回復する伸縮可能な構成である。
【0049】
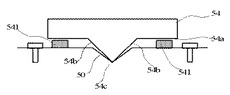
さらに図7に示す第4の変形例について説明する。基本構成は第1の実施の形態と同様の構成であるが、下電極体と緩衝体の構成が異なっている。下電極体54を構成する基台5にはテーパを有する凹部50が形成されている。また下電極体54はその下面において外周縁部が周状に形成された平坦な支持部54aを有しており、その内側には前記凹部50のテーパに対応したテーパ54bを有する凸部54cを有する構成である。また前記支持部54aに対向した基台には緩衝体541が形成されている。緩衝体541は枠状のジェル体からなり、下電極体54が傾いた際に当接し、緩衝する構成となっている。
【0050】
また本実施の形態においては、ATカット水晶振動板の製造例について説明したが、他の厚み振動系圧電振動板の測定に適用してもよく、例えばセラミック振動子等の製造に適用してもよい。また基台としてインデックステーブルを用いた構成を例示したが、インデックステーブルを用いない圧電振動板の周波数測定装置に適用することも可能である。
【0051】
なお、本発明は、その精神や主旨または主要な特徴から逸脱することなく、他のいろいろな形で実施することができる。そのため、上述の実施例はあらゆる点で単なる例示にすぎず、限定的に解釈してはならない。本発明の範囲は特許請求の範囲によって示すものであって、明細書本文には、なんら拘束されない。さらに、特許請求の範囲の均等範囲に属する変形や変更は、全て本発明の範囲内のものである。
【産業上の利用可能性】
【0052】
水晶振動子、水晶発振器等の圧電振動デバイスあるいは他の電子部品の量産に適用できる。
【符号の説明】
【0053】
1 パーツフィーダ
2 第1の移載装置
3 インデックステーブル
31,32,33,34,35,36,37、38 下電極体
4 周波数測定部
41 電動アクチュエータ
43 上電極体
44,45 下電極体
5 第2の移載装置
6 収納箱
【技術分野】
【0001】
本発明はATカット水晶振動板等の圧電振動板の周波数分類装置に関するものである。
【背景技術】
【0002】
例えば、ATカット水晶振動板は、その厚さに周波数が依存することが知られており、所定の厚さに平面研磨することにより所望の周波数を得ている。しかしながら製造ばらつきによりその厚さすなわち周波数がばらつくことは実務上不可避であり、励振電極形成工程前に素板状態での周波数を測定し、周波数帯毎にグループ化し、そしてグループ毎に励振電極形成量(厚さ)を決定することが行われていた。
【0003】
素板状態での周波数測定は、例えば特開平11−142456号(特許文献1)に示すように、下部電極(下電極体)上に載せた圧電共振子に対し上部電極(上電極体)を非接触で近接させエアギャップ方式にて測定を行うことが知られている。このような測定はギャップ(近接距離)によってもその精度が異なってくるので、適切なギャップを設定することが重要であり、特許文献1においては上部電極の上部に設けられたマイクロメータにより上部電極を手動にて上下動させギャップを調整していた。
【0004】
具体的にはマイクロメータを装備した周波数測定装置を用い、インデックステーブル上に形成された下電極体に搭載された圧電振動板に対して上電極体を近接させ、所定のギャップLを有した状態で周波数測定を行う。ギャップの調整は事前に装置上部に設けられたマイクロメータにより行っていた。
【0005】
ところでこのような調整方法は上部電極と下部電極が一対で構成しているときは最初の設定で上部電極の下降位置を決定することによりギャップの調整が可能である。しかしながら、例えばインデックステーブルに複数の下部電極が設けられた構成のように、1つの上部電極に対し複数の下部電極が可動状態で対応する構成においては、下部電極の高さばらつきが考えられるので上部電極の降下位置を特定することが困難であった。また下部電極はその上面が傾斜している場合があり、このような場合正確な周波数測定ができないことがあった。
【特許文献1】特開平11−142456号
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は上記問題点を解決するためになされたもので、生産性に優れ、かつ測定における信頼性の高い圧電振動板の周波数測定装置を提供することを目的とするものである。
【課題を解決するための手段】
【0007】
本発明は、下電極体が緩衝体に保持されるとともに当該下電極体に複数領域で接触する接触体を有するものであり、具体的には下電極体上に圧電振動板を搭載し、前記圧電振動板に対して上電極体を近接させた状態で圧電振動板の周波数を測定する圧電振動板の周波数測定装置であって、前記下電極体は緩衝体に保持されるとともに上面に平面を有し、前記上電極体は圧電振動板との近接面を有し、また前記上電極体と一体的に動作し、前記下電極体に複数領域で接触する接触体を有し、かつ前記各接触体の下電極体への接触面は同一の高さに設定されるとともに、前記接触面は前記近接面より下電極体に近い位置に配置されていることを特徴としている。
【0008】
上記緩衝体は柔軟な材料または弾性を有する材料からなる。これに対して上記下電極体は変形の少ない固体を用いており、また下電極体の圧電振動板搭載面は平面を有している。また前記接触体は金属等の固体からなり、下電極面の表面に接触し当該表面に押圧力をかける、突き当てを行うものである。従って接触体の突き当てにより下電極体の平面に力が加わった場合、緩衝体が変形し当該緩衝体の変形に追随するかたちで下電極体の上面の傾きを自在に変えることができる。また上電極体と一体的に動作する複数の接触体は上電極体と直接接続してもよいし、間接的に接続され、一体的に動作する構成でもよい。接触体は下電極体に複数領域で接触する構成であり、複数の接触面を有する構成でもよいし、枠状の一体構成とし、下電極体に広い面積で接触する構成としてもよい。
【0009】
本発明によれば、前記下電極体は緩衝体に保持されるとともに上面に平面を有し、前記上電極体は圧電振動板との近接面を有し、また前記上電極体と一体的に動作し、前記下電極体に複数領域で接触する接触体を有し、かつ前記各接触体の下電極体への接触面は同一の高さに設定されるとともに、前記接触面は前記近接面より下電極体に近い位置に配置されている構成であるので、接触体が下電極体に接触することになり、上電極体の近接面と下電極体の表面の距離(ギャップ)を一定に保つことができる。また下電極体が緩衝体で保持されているので、下電極体の圧電振動板の搭載面に傾きがあったとしても下電極体が複数領域で接触する接触体により、当該傾きが是正され、上電極体の近接面と下電極体の上面の距離(ギャップ)を一定に保つことができる。
【0010】
前記接触体は下電極体に複数領域で接触することが必要であり、この場合当該接触体は前記上電極体の周囲に相互に離間して配置される。特に前記接触体は3体構成であり、上電極体の周囲に配置されていることを特徴とする構成であってもよい。この場合、前記3体構成の接触体を上電極体の周囲に等間隔で配置すると安定した傾き補正を行うことができる。また接触体を4体以上で構成すると下電極体の傾きを高精度に是正することができる。
【発明の効果】
【0011】
本発明によれば、生産性に優れ、かつ測定における信頼性の高い圧電振動板の周波数測定装置を得ることができる。
【図面の簡単な説明】
【0012】
【図1】本実施の形態に係る製造装置の概略構成図
【図2】本発明による実施の形態を示す図1のA−A断面図
【図3】本発明による周波数測定部の斜視図
【図4】本発明による周波数測定部の他の例を示す斜視図
【図5】本発明による下電極体の構成の他の例を示す図
【図6】本発明による下電極体の構成の他の例を示す図
【図7】本発明による下電極体の構成の他の例を示す図
【発明を実施するための最良の形態】
【0013】
以下、本発明による好ましい実施の形態について図面に基づいて説明する。
本発明の実施の形態について、圧電振動板としてATカット水晶振動板の測定方法を例にとり図面とともに説明する。図1は本実施の形態に係る製造装置の概略構成図であり、図2は本発明による実施の形態を示す図1のA−A断面図、図3は本発明による周波数測定部の斜視図である。
【0014】
図1において1はパーツフィーダ、2は第1の移載装置、3はインデックステーブル(基台)、4は周波数測定部、5は第2の移載装置、6は収納箱、Qは水晶振動板(圧電振動板)である。
【0015】
水晶振動板Qは平行平面研磨により薄板に加工された矩形状のATカット水晶振動板であり、パーツフィーダ1により個別に供給される。
【0016】
パーツフィーダ1は投入された多数個の水晶振動板Qを整列して排出口12へ供給する装置であり、すり鉢状の容器11にらせん状の流路を形成し(図示せず)、容器11に微小振動を与えることにより、ランダムに投入された水晶振動板Qが排出口12に順次押し出される構成である。なお、パーツフィーダに代えて例えばマトリクス状の水晶振動板収納室を有するパレットからインデックステーブルに供給する方式であってもよい。また、複数の水晶振動板を平板状でランダムに配置し、画像認識技術を用いて個別に水晶振動板をピックアップしてインデックステーブルに供給する方式であってもよい。
【0017】
パーツフィーダの排出口12に送られた水晶振動板Qは第1の移載装置2により取り出される。第1の移載装置2は基体20に対して平面視直角の方向に伸長する位置にアーム21が取着され、当該アーム2は基体20に対して直角方向(X方向)と基体に沿う方向(Y方向)に動作するとともに、上下方向(Z方向)にも動作し、3次元的な動作が可能となっている。アーム21は図示しない電動アクチュエータにより動作し、当該電動アクチュエータは図示しない制御部の指令により動作する。アーム21の先端部分には水晶振動板Qを吸引する吸引口21aが形成されている。当該吸引機構は例えば負圧のエアを供給または停止することにより、吸引または吸引解除を行う。なお、第1の移載装置において、水晶振動板Qをピックアップする方法は前述の吸引による方法のみならず、例えば水晶振動板の外周を把持するチャッキングであってもよい。これは第2の移載装置においても同様である。
【0018】
水晶振動板Qが第1の移載装置によって移載されるインデックステーブル3は平面で見て円板形状であり、本発明の基台に相当する。インデックステーブル表面の外周領域には下電極体31,32,33,34,35,36,37,38が所定の等間隔を保って全周に渡って設けられている。当該下電極体は矩形状の導電セラミックスからなり、その上面はインデックステーブル上面とほぼ平行な平面を有している。また各下電極体は絶縁材からなる緩衝体を介してインデックステーブルに固定されており、各々電気的に独立した状態で通電可能となっている。なお下電極体で用いる導電セラミックスは金属に較べて耐摩耗性に優れ、硬質な水晶による摩耗を防ぐことができ、また金属と同様、上部面をポリッシュ加工することにより、平行で平滑な平面を得ることができる。なお、下電極体の材料を導電セラミックスに代えて金属材等の導電材料を用いてもよい。
【0019】
下電極体31,32,33,34,35,36,37,38の下部には各々緩衝体31a,32a,33a,34a,35a,36a,37a,38aが配置されている。具体的には図2に示すように下電極体37の下部には緩衝体371が密着して設けられ、また下電極体33の下部には緩衝体331が密着して設けられている。下電極体と緩衝体の密着は接着剤を用いた接着や、ネジやリベットを用いた結合をあげることができる。本実施の形態ではネジを用いて密着している。このような構成により下電極体は図3の矢印で示すように、上下方向に動作可能となっている。
【0020】
なお、上記実施の形態において各緩衝体は下電極体より面積が大きく構成され、平面視で外周の一部がはみ出た構成となっているが、これに限定されるものではなく緩衝体が下電極体より小さい構成であってもよく、また下電極体の底面を複数の緩衝体で保持する構成であってもよい。なお、図示していないが下電極体の水晶振動板Qの搭載領域には小径のエア流通孔が形成されている。当該エア流通孔により水晶振動板を下電極体に搭載した際の吸引保持を行っている。
【0021】
また本実施の形態において緩衝体はウレタンゴムを用いている。ウレタンゴムは柔軟でかつ弾性のある材料であり、下電極体の表面に力が加わった場合、下電極の表面の傾きを自在に変えることができる。またウレタンゴムに代えてシリコンゴムやゲルシート等の材料を用いてもよい。
【0022】
また当該インデックステーブル3において、パーツフィーダから移載される場所は供給ステーションIとなり、また供給ステーションIの対面には排出ステーションOが形成されている。また周波数測定部4の配置位置は測定ステーションSとなる。
【0023】
ところでインデックステーブル3は平面的に回転駆動可能となっており、当該回転は例えばサーボモータで駆動される。サーボモータはインデックステーブル駆動制御部からのパルス信号で駆動し、回転速度、回転量等を制御するが、これによりインデックステーブル3を任意の設定で動作させることができる。本実施の形態においては、各下電極体を均等な間隔を持って8つ設けているので、周波数測定実行時には45度づつ間欠的に回転を行う。この回転量は周波数測定以外の必要な製造工数がある場合等によって任意に設定することができ、サーボモータへの制御信号により調整することができる。もちろん下電極体を90度毎にインデックステーブルに配置した4つの構成であってもよく、この場合は90度毎の回転量となる。
【0024】
このようなインデックステーブル3には供給ステーションIから時計回りに90度回転したところに、周波数測定部4が配置され、また排出ステーションOから時計回りに90度回転したところに、排出確認部45が配置された確認ステーションCが設けられている。
【0025】
周波数測定部4は電動アクチュエータ41と電動アクチュエータ41によって上下動する絶縁体42と上電極体43とを有する。上部電極体43は例えば銅、真鍮、SK材等からなる導電性の良好な材料が用いられ、また全体として円柱形状であり鉛直方向に伸長する構成である。上電極体43は下電極体上面との対向面、すなわち圧電振動板Qとの近接面43aを有しており、当該近接面43aは下電極体上面と平行な平面を有している。上電極体43は下電極体とともに適切なギャップが構成され、下電極体の上面に圧電振動板を配置することにより、エアギャップ方式にて圧電振動板の周波数を測定する。
【0026】
絶縁体42は円柱形状であり、また絶縁体42の側面には導電体からなる連結部44b、45b、46bの一端が接合されており、これら連結部44b、45b、46bは相互に離間する方向に伸長している。当該連結部44b、45b、46bの他端には接触体44,45,46が接合されている。これにより連結部と接触体は電気的に接続されている。接触体44,45,46は円柱形状の金属材からなり、上電極体の伸長する方向に平行に伸びており、その最下面は接触面44a,45a,46aを有している。接触面44a,45a,46aは平面であり、相互に同一の高さに設定されている。なお、接触体の材料は金属材に代えて、樹脂材やセラミック材であってもよい。いずれの材料においても耐摩耗性の高い材質を用いることが好ましい。なお、図示していないが、絶縁体42の内部においては上電極体と接触体につながった連結体が電気的に独立した状態で保持され、それぞれの端子がネットワークアナライザに接続されている。
【0027】
図2および図3に示すように、前記接触体の接触面44a,45a,46aは上電極体の近接面43aより低い位置、すなわち下電極体に近い位置に配置されている。また接触面44a,45a,46aは上電極体が近接する圧電振動板よりも外側に位置し、接触面44a,45a,46aが下電極体37の表面に接触することにより、前記近接面43aは圧電振動板Qに近接し、この状態で電圧を引加し周波数を測定する。
【0028】
上記から明らかなとおり前記接触面と前記近接面の高さの差が上電極体と下電極体の間隔(ギャップ)となる。当該間隔は基本的には一定であるが、測定する圧電振動板の厚さによって調整されることがある。
【0029】
電動アクチュエータ41は外部からの制御信号により所定量の動作を行う構成であり、例えばステッピングモータによる回転運動をボールねじとカップリングにより直線運動させる構成や、あるいはサーボモーターとエンコーダとボールねじとカップリングによる構成や、あるいは圧電素子を用いた超音波モータにより所定量の動作を行わせる構成をあげることができる。本実施の形態ではステッピングモータとボールねじとカップリングによるアクチュエータを用いており、上電極体43は電動アクチュエータ41により高速かつ高精度に上下動作する。なお、ステッピングモータを用いた場合は、オープンループ型で一方通行的な制御になるが、近年はモータの基本ステップ角の小さいものを採用したり、脱調レス機能を付加すること等により、精度を向上させることができる。またサーボモータを用いた場合は、クローズドループ型での回転位置を検出するエンコーダを高分解能なものにすることにより、より高精度の位置決めを行うことができる。
【0030】
第2の移載装置5はインデックステーブル3の排出ステーションOに送られた水晶振動子Qを収納箱に移載する機能を有している。当該第2の移載装置も第1の移載装置と同じく、基本的にはアーム51の先端部分には水晶振動板Qを吸引する吸引口51aが形成されており、当該吸引機構は例えば負圧のエアを供給または停止することにより、吸引または吸引解除を行う。当該アーム51は基体50に対して直角方向(X方向)と基体に沿う方向(Y方向)に動作するとともに、上下方向(Z方向)にも動作し、3次元的な動作が可能となっている。これにより排出ステーションOにある水晶振動板Qをアーム51の吸引口51aにより吸引し、上部方向へ移動後、XY方向に移動し、さらに下方向に移動して吸引を解除し収納箱6の所定の場所に移載する。
【0031】
収納箱6は樹脂または金属からなり、周波数測定後の水晶振動板Qを収納するポケットをマトリクス状に有する構成である。本実施の形態においては各ポケットが所定の周波数帯毎に分けられており、前述の周波数測定結果に応じて所定のポケットに水晶振動板Qを収納する。従って、測定の結果同じ周波数帯の水晶振動板は同じポケットに収納されることになる。
【0032】
なお、水晶振動板をマトリクス状のポケットに測定順に順次1枚ずつ収納してもよい。この場合、収納箱のポケットの位置で水晶振動板の周波数を特定できるので、ポケットの位置データと周波数データを次工程が引き継ぐことにより、水晶振動板に対し個別に電極形成等の加工を行う際に有効である。
【0033】
排出確認部45は、確認ステーションCの工程部分に設けられ、排出ステーションOにより下電極体上面から排出されなかった水晶振動板Qを吸引チューブバルブにより強制的に排出する。
【0034】
次に本装置を用いて水晶振動板Qの周波数を測定し、その測定結果に基づいて所定の周波数に分類する動作例について図1乃至図3を参照して説明する。
【0035】
最初に水晶振動板Qの周波数測定作業を行う。まずパーツフィーダ1には多数個の水晶振動板Qを投入し、これによりパーツフィーダ1の搬送動作により排出口12に順次水晶振動板Qが送られる。第1の移載装置2は第1の移載制御部72の指令により、アーム21により排出口にある水晶振動板Qを吸引し、搭載ステーションに位置する下電極体31の上面に順次移載する。
【0036】
インデックステーブル3はインデックステーブル駆動制御部74の指示により、サーボモータが駆動し、時計回りである矢印B方向に間欠的な回転動作が行われる。インデックステーブル3が間欠的に回転することにより、次の下電極体32が搭載ステーションに位置すると順次下電極体に水晶振動板Qが移載される。
【0037】
下電極体31に搭載された水晶振動板Qが搭載ステーションから2段階間欠回転すると測定ステーションSに移動する。当該測定ステーションSでは、周波数測定部が設置され、図示しない制御部の指示により、上電極体が下電極体に近接する。この近接あるいは離間動作は制御部からの命令により電動アクチュエータが動作することにより行われる。
【0038】
上電極体43を下電極体37に向かって近接させると、まず前記接触体44,45、46が下電極体に接触する。ここで下電極体37の表面に傾きが生じていた場合、まずいずれか一方の接触体が下電極体に接触する。例えば接触体44が先に下電極体37に接触したとすると、当該接触体44の押圧力によって前記緩衝体371が変形し、接触体44側の下電極体3が下降する。そして最終的に接触体の接触面44aと45aと46aが下電極体37に接触し、当該各接触面で形成される平面に追随するかたち緩衝体が変形して、上電極体43と下電極体37が所定間隔のギャップをもって平行に対向する。また水晶振動板Qが当該ギャップ間に上電極体とは非接触で配置される。上記所定間隔のギャップは前記接触体の接触面と前記上電極体の近接面との高低差に相当する。当該接触体の下電極体への接触により両者が導通し、電気的には上電極体と下電極体で対向する構成となる。
【0039】
この非接触の対向状態で両電極体間に所定周波数の電圧を印加することにより、エアギャップ方式で水晶振動板Qの周波数の測定を行う。当該周波数の測定においては上電極体と下電極体間に前述のネットワークアナライザからの複数の周波数信号を印加し、そのゲインを取得して周波数の測定を行っている。測定された周波数データは中央制御部を介してメモリに転送され、周波数毎に定められた収納箱6のポケット位置が決定される。
【0040】
水晶振動板Qが測定ステーションSからさらに2段階間欠回転すると排出ステーションOに移動する。排出ステーションOにおいては第2の移載装置により下電極体上面の水晶振動板Qが収納箱に移載される。この第2の移載装置は中央制御部からの周波数測定データに基づいて第2移載制御部の指令により動作し、下電極体上面にある水晶振動板をアーム51により吸引し、3次元動作により、収納箱の周波数帯毎に定められたポケットに移載される。なお、収納箱が平面的に移動することにより、移載するポケットを特定する構成であってもよい。
【0041】
この後インデックステーブル3は順次回転し、下電極体31が確認ステーションCに移動した際に排出確認部45により、当該下電極体に残っている水晶振動板Qがあれば吸引チューブバルブにより強制的に排出される。
【0042】
このような一連の動作をパーツフィーダ1から供給された水晶振動板Qについて順次行うことにより、水晶振動板の周波数測定と周波数分類を進める。
【0043】
上記実施の形態において、1つの下電極体に複数の水晶振動板(圧電振動板)を搭載してもよい。例えば1つの下電極体に2つの水晶振動板を所定の間隔をもって並列に並べて搭載し、周波数測定時には各々の水晶振動板に上電極体を順次近接させ、周波数測定を行う。従って、下電極体を次のステージに移動させるときはインデックステーブルの回転量を大きくし、下電極体に並列された隣接する水晶振動板を移動させる場合は、インデックステーブルの回転量を微少にする。
【0044】
本発明による実施形態における各変形例を図4乃至図7とともに説明する。図4は第1の変形例を示す斜視図である。基本構成は第1の実施の形態と同様の構成であるが、接触体と緩衝体の構成が異なっている。基台5上に緩衝体511が設定され、当該緩衝体511上に下電極体51が搭載されている。本変形例では平面で見て緩衝体511のサイズが下電極体51のサイズより小さく構成されている。これにより上電極体の押圧力による緩衝体の変形がスムーズになり、下電極体の傾き補正が容易となる。
【0045】
上電極体43と一体的に動作する接触体61はその下端部分に接触枠610が形成されている。当該接触枠610は円形の枠部を有し、周波数測定時には枠内に水晶振動板が配置される構成となる。接触枠610の下電極体51と対向する面には接触面610aが形成され、当該接触面610aは同一平面の平坦な構成である。
【0046】
下電極体51が傾いている場合には、前記接触面610aのいずれかの領域が下電極体に接触し、その押圧力により緩衝体511が変形し、接触面610aの他の領域も下電極体に接触し、最終的に接触面610aと下電極体51の上面が複数の領域にて接触する面接触によって上電極体43と下電極体51のギャップが適正に形成される。
【0047】
次に図5に示す第2の変形例について説明する。基本構成は第1の実施の形態と同様の構成であるが、下電極体と緩衝体の構成が異なっている。下電極体52はその下面がテーパ部52aとその中央部に突起部52bが形成された錐形の構成である。緩衝体521はコイルバネであり、前記テーパ部52aの斜面に対応してコイルバネが配置されている。コイルバネからなる緩衝体により下電極体に対する接触体の押圧力に遅滞なく追随し、下電極体の傾き補正をレスポンス良く行うことができる。
【0048】
次に図6に示す第3の変形例について説明する。基本構成は第1の実施の形態と同様の構成であるが、下電極体と緩衝体の構成が異なっている。下電極体53はその下面において外周縁部に周状に形成された平坦な支持部53aを有しており、その内側は球面状の曲率部53bを有する構成である。また支持部53aは緩衝体531により支持されている。緩衝体531は例えばダンパーやショックアブソーバー等の減衰装置であり、上電極体の押圧力により抵抗を持って収縮し、また押圧力が無くなると無負荷の初期状態に回復する伸縮可能な構成である。
【0049】
さらに図7に示す第4の変形例について説明する。基本構成は第1の実施の形態と同様の構成であるが、下電極体と緩衝体の構成が異なっている。下電極体54を構成する基台5にはテーパを有する凹部50が形成されている。また下電極体54はその下面において外周縁部が周状に形成された平坦な支持部54aを有しており、その内側には前記凹部50のテーパに対応したテーパ54bを有する凸部54cを有する構成である。また前記支持部54aに対向した基台には緩衝体541が形成されている。緩衝体541は枠状のジェル体からなり、下電極体54が傾いた際に当接し、緩衝する構成となっている。
【0050】
また本実施の形態においては、ATカット水晶振動板の製造例について説明したが、他の厚み振動系圧電振動板の測定に適用してもよく、例えばセラミック振動子等の製造に適用してもよい。また基台としてインデックステーブルを用いた構成を例示したが、インデックステーブルを用いない圧電振動板の周波数測定装置に適用することも可能である。
【0051】
なお、本発明は、その精神や主旨または主要な特徴から逸脱することなく、他のいろいろな形で実施することができる。そのため、上述の実施例はあらゆる点で単なる例示にすぎず、限定的に解釈してはならない。本発明の範囲は特許請求の範囲によって示すものであって、明細書本文には、なんら拘束されない。さらに、特許請求の範囲の均等範囲に属する変形や変更は、全て本発明の範囲内のものである。
【産業上の利用可能性】
【0052】
水晶振動子、水晶発振器等の圧電振動デバイスあるいは他の電子部品の量産に適用できる。
【符号の説明】
【0053】
1 パーツフィーダ
2 第1の移載装置
3 インデックステーブル
31,32,33,34,35,36,37、38 下電極体
4 周波数測定部
41 電動アクチュエータ
43 上電極体
44,45 下電極体
5 第2の移載装置
6 収納箱
【特許請求の範囲】
【請求項1】
下電極体上に圧電振動板を搭載し、前記圧電振動板に対して上電極体を近接させた状態で圧電振動板の周波数を測定する圧電振動板の周波数測定装置であって、
前記下電極体は緩衝体に保持されるとともに上面に平面を有し、
前記上電極体は圧電振動板との近接面を有し、また前記上電極体と一体的に動作し、前記下電極体に複数領域で接触する接触体を有し、かつ前記各接触体の下電極体の上面への接触面は同一の高さに設定されるとともに、
前記接触面は前記近接面より下電極体に近い位置に配置されていることを特徴とする圧電振動板の周波数測定装置。
【請求項2】
前記接触体は3体構成であり、上電極体の周囲に配置されていることを特徴とする請求項1記載の圧電振動板の周波数測定装置。
【請求項1】
下電極体上に圧電振動板を搭載し、前記圧電振動板に対して上電極体を近接させた状態で圧電振動板の周波数を測定する圧電振動板の周波数測定装置であって、
前記下電極体は緩衝体に保持されるとともに上面に平面を有し、
前記上電極体は圧電振動板との近接面を有し、また前記上電極体と一体的に動作し、前記下電極体に複数領域で接触する接触体を有し、かつ前記各接触体の下電極体の上面への接触面は同一の高さに設定されるとともに、
前記接触面は前記近接面より下電極体に近い位置に配置されていることを特徴とする圧電振動板の周波数測定装置。
【請求項2】
前記接触体は3体構成であり、上電極体の周囲に配置されていることを特徴とする請求項1記載の圧電振動板の周波数測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−61269(P2013−61269A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−200538(P2011−200538)
【出願日】平成23年9月14日(2011.9.14)
【出願人】(000149734)株式会社大真空 (312)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月14日(2011.9.14)
【出願人】(000149734)株式会社大真空 (312)
【Fターム(参考)】
[ Back to top ]