
圧電気を用いた構造ヘルスモニタリング用の海洋複合ライザ

【課題】海洋複合ライザ列のための構造ヘルスモニタリングシステムを提供する。
【解決手段】各ライザパイプ区間31が、軸Aを有する円筒形状と、またカーボンエポキシ基材37とを含む。センサ38は、ライザパイプ区間に関連付けられ、ライザパイプ区間を実質的に外接して囲む。センサは、ポリフッ化ビニリデン積層体35と、電極36とを含み、振動を含むライザ区間の機械的応力および歪みに応答して電極に電気を発生する。システムはまた、データ収集システムと、センサの電極に発生した電気に応答した信号を分析し、海洋ライザパイプ列のためのヘルスモニタリングおよび損傷検出を行うデジタル信号アナライザとを含むことができる。システムはさらに、水面下エネルギー蓄積デバイスと、水面下エネルギー蓄積デバイスに結合された複数の水面下微小電気機械デバイスとを含むことができる。
【解決手段】各ライザパイプ区間31が、軸Aを有する円筒形状と、またカーボンエポキシ基材37とを含む。センサ38は、ライザパイプ区間に関連付けられ、ライザパイプ区間を実質的に外接して囲む。センサは、ポリフッ化ビニリデン積層体35と、電極36とを含み、振動を含むライザ区間の機械的応力および歪みに応答して電極に電気を発生する。システムはまた、データ収集システムと、センサの電極に発生した電気に応答した信号を分析し、海洋ライザパイプ列のためのヘルスモニタリングおよび損傷検出を行うデジタル信号アナライザとを含むことができる。システムはさらに、水面下エネルギー蓄積デバイスと、水面下エネルギー蓄積デバイスに結合された複数の水面下微小電気機械デバイスとを含むことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、石油およびガス産業に関する。より詳細には本発明は、生産段階での海洋複合ライザシステムの能動的構造ヘルスモニタリングに関する。
【背景技術】
【0002】
石油およびガス産業において、ライザは、水面と海底の間の一連のパイプである。石油およびガスライザパイプ列は、順次組み立てられ、当業者には理解されるように、水上船舶、掘削装置、またはプラットフォームを、たとえばクリスマスツリー、噴出防止装置(BOP)、または下部海洋ライザパッケージ(LMRP)を含む海中機器に接続する。
【0003】
海での通常の現地敷設時には、海洋ライザパイプは船の甲板から個々に持ち上げられ、ライザスパイダにおいて互いに接続され、降ろされる。2つのライザパイプは、機械的コネクタを用いて連結または結合される。2つのライザ結合部の間の長さは、ライザシステムに対する要件に応じて通常は40から80フィートの間で変わる。
【0004】
参照によりその全体が本明細書に組み込まれる、本願の所有者が所有する米国特許出願第12/029,376号などには、ライザライフサイクル管理システム(RLMS)が述べられている。このようなライザライフサイクル管理システムは、たとえば、特定の船に割り当てられたすべてのライザ資産のリストを資産管理者に提供し、さらに現在展開されている、甲板上にある、および保守のために除外されている資産の内訳、それと共に予定された返却日、来るべき計画された保守イベントのリスト、特定のライザ資産によって拡大される動作寿命の推定、および特定のライザ資産によって使用された総動作寿命の推定を、最も損傷を与える事象(すなわち、ある種のハリケーン事象)の詳細と共に提供することができる。
【0005】
圧電気は、機械的歪みおよび応力を受けた誘電体結晶内で電気または電気的極性が生じること、あるいは印加電圧を受けたこのような結晶内で歪みおよび応力が生じることである。
【0006】
既存の構造ヘルスモニタリング手法および技術は、すべて様々な利点、欠点、およびトレードオフを有する。
【0007】
たとえばX線透視法は、内部損傷および広がりを検出することができ、比較的簡単であり、結果の永久的な記録(すなわち、X線画像)を生成することができる。しかしX線透視法は、実施に費用がかかり、高価な機器を必要とし、時間がかかり、正しく解釈するにはスキルを要する。したがってX線透視法は、完全には自動化されていない(すなわち作業者を必要とする)。
【0008】
たとえば歪みゲージは、構造ヘルスモニタリングにとって軽量であり、低電力で動作する。歪みゲージは可搬であり、表面実装することができ、手順が比較的簡単である。しかし歪みゲージは、実施に費用がかかり、高価な機器を必要とする。
【0009】
たとえば光ファイバは、一般に、構造ヘルスモニタリングに安価な機器を用いて広い範囲をカバーすることができる軽量なソリューションである。しかし光ファイバは、実施に費用がかかり、診断プロセスにおいてレーザを必要とし、光ファイバは構造ヘルスモニタリングソリューション内に埋め込まれなければならない。
【0010】
たとえば超音波構造ヘルスモニタリングソリューションは、可搬であり、小さな損傷に感度があり、広い範囲を迅速にスキャンする。しかし超音波構造ヘルスモニタリングソリューションは、非常に高価な機器を使用し、複雑な結果を生じ、動作のために特殊なシステムを必要とする。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】米国特許出願公開第2008/0249720号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
上記に鑑みて、本出願人は、圧電気に基づく構造ヘルスモニタリング技術なら、比較的小さなまたは比較的大きな範囲を迅速にスキャンすることができる、可搬、軽量、低電力、および(機器および実施が共に)安価なソリューションがもたらされると理解する。さらに本出願人は、海洋ライザシステムは、曲げおよび引張応力および歪みの連続的な発生源となると理解する。通常はライザは、構造体全体を安定に保つために、水面にて張力調整器を用いて張力を加えた状態に保たれる。圧縮を受けたライザは曲がる場合があり、結果として不安定なライザシステムとなる。また船の相対位置ずれまたはプラットフォームシフトによるライザの動きは、ライザパイプ列に沿った曲げ応力および歪みを引き起こす。さらに本出願人は、能動的構造ヘルスモニタリングおよび海中発電用に、海洋ライザシステムによって、ポリフッ化ビニリデン(PVDF)積層体またはフィルムを用いることができると理解する。PVDFは、CH2−CF2を反復単位とする分子の長い連鎖からなる半結晶ポリマーである。具体的には本出願人は、海洋ライザパイプ区間の機械的応力および歪みに応答してセンサの電極に電気が発生するように、PVDF積層体またはフィルムを、ライザ複合パイプに埋め込み、ライザ複合パイプに実質的に外接して囲み、振動をベースとする歪みセンサを構成できると理解する。有利にはこのような積層体の実施形態は、複合ライザ内の亀裂を検出する向上された能力をもたらす(単に応力および歪み検出をもたらすだけでなく)。本出願人は、圧電効果によって、接合されたまたは埋め込まれたPVDF積層体からかなりの大きさの電力を発生できると理解する。さらに本出願人は、改善された亀裂検出を含む、海洋ライザシステムにおける能動的構造ヘルスモニタリングおよび海中発電用に圧電気を用いたシステム、装置、および関連する方法の必要性を認識する。
【課題を解決するための手段】
【0013】
本発明の実施形態は、たとえばライザ列のための構造ヘルスモニタリングシステムを含む。システムは、海洋ライザパイプ列を含むことができる。海洋ライザパイプ列は、複数のライザパイプ区間と、複数のライザコネクタとを含むことができる。複数のライザパイプ区間のそれぞれは、軸と、カーボンエポキシ基材と、センサとを有する円筒形状を含むことができる。センサは、電極と、ライザパイプ区間を実質的に外接して囲むポリフッ化ビニリデン(PVDF)積層体とを含むことができ、それにより、(より小さい占有面積を有する)より小さな圧電センサに勝る向上されたライザ亀裂検出をもたらす。センサは、ライザパイプ区間の機械的応力および歪みに応答して電極に電気を発生するように構成することができる。システムはさらに、複数のライザパイプ区間用のセンサの電極に発生した電気に応答した電気信号を捕捉し、デジタル化し、分析し、海洋ライザパイプ列のためのヘルスモニタリングをもたらすための、たとえば水面に配置されたデータ収集システムと、デジタル信号アナライザとを含むことができる。
【0014】
デジタル信号アナライザの実施形態は、たとえば、プロセッサと、入力/出力デバイスと、その中にコンピュータプログラム製品が記憶された有形で永続的なメモリとを含むことができる。コンピュータプログラム製品は、プロセッサによって実行されたときに、様々な動作を実行することによって海洋ライザパイプ列のためのヘルスモニタリングをデジタル信号アナライザに行わせる、1組の命令を含むことができる。動作は、入力/出力デバイスによって、複数のライザパイプ区間用のセンサの電極に発生した電気に応答した電気信号を受け取ることを含むことができる。動作はまた、プロセッサによって、海洋ライザパイプ列のためのヘルスモニタリングを行うために電気信号を分析することを含むことができる。
【0015】
本発明の実施形態は、たとえば、複合ライザ内の亀裂を検出する方法を含む。方法は、複数のライザパイプ区間を使用して海洋ライザパイプ列を組み立てるステップを含む。複数のライザパイプ区間のそれぞれは、軸を有する円筒形状を含むことができ、複数のライザパイプ区間の少なくとも1つのライザパイプ区間は、カーボンエポキシ基材を含むことができる。方法は、少なくとも1つのライザパイプ区間に少なくとも1つのセンサを設けるステップを含むことができ、センサはライザパイプ区間を実質的に外接して囲む。センサは、ポリフッ化ビニリデン積層体と、電極とを含むことができる。方法は、ライザパイプ区間の機械的応力および歪みに応答してセンサの電極に電気を発生するステップを含むことができる。方法は、電気信号を分析するステップを含むことができ、電気信号は少なくとも1つのセンサの電極に発生した電気に応答し、それによって少なくとも1つのライザパイプ区間内の亀裂を検出する。方法はさらに、データ収集システムと、デジタル信号アナライザとを含むことができる。
【0016】
方法の実施形態はさらに、発生した電気からのエネルギーを水面下エネルギー蓄積デバイスに蓄積するステップと、水面下エネルギー蓄積デバイスから水面下微小電気機械デバイスに電気を供給するステップとを含むことができる。
【0017】
本発明の実施形態は、たとえば装置を含む。装置は、たとえば、円筒形状および軸を有する海洋ライザパイプ区間を含むことができる。海洋ライザパイプ区間は、カーボンエポキシ基材を含むことができる。装置はまた、海洋ライザパイプ区間に関連付けられ、海洋ライザパイプ区間を実質的に外接して囲むセンサを含むことができる。センサは、ポリフッ化ビニリデン積層体と、電極とを含むことができる。センサは、海洋ライザパイプ区間の機械的応力および歪みに応答してセンサの電極に電気を発生するように構成することができる。装置の実施形態はさらに、約50ミクロンから約250ミクロンの間のポリフッ化ビニリデン積層体の厚さと、導電性銀インク被覆を含む電極とを含むことができる。
【0018】
他の従来のソリューションは、センサを海洋ライザ上にばらばらに取り付けており、ライザ区間を実質的に外接して囲む、またはライザパイプ区間の長さの75%より大きな長さに対してライザパイプ区間の軸に沿って延在する圧電気センサは述べていない。他の従来技術のソリューションは、本明細書に述べられる向上された亀裂検出機能を含む、PVDFの実施形態およびそれらの応用を認識していない。
【0019】
本発明の特徴および利点、ならびに明らかとなるその他をより詳細に理解できるように、本明細書の一部となる添付の図面に示されるその実施形態を参照することによって、上記に簡潔にまとめた本発明のより具体的な説明が得られよう。しかし図面は、本発明の様々な実施形態のみを示し、したがって、本発明は他の有効な実施形態も含み得るので、本発明の範囲を限定すると見なされるべきでないことに留意されたい。
【図面の簡単な説明】
【0020】
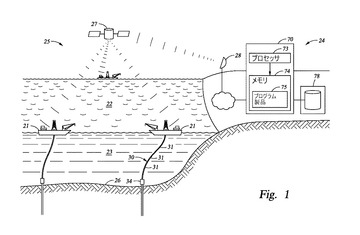
【図1】本発明の一実施形態による、海洋ライザ列のための能動的構造ヘルスモニタリングシステムの環境を示す図である。
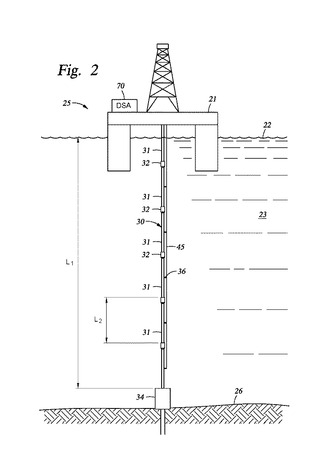
【図2】本発明の一実施形態による、海洋ライザ列のための能動的構造ヘルスモニタリングシステムの概略図である。
【図3】本発明の一実施形態による、ポリフッ化ビニリデン(PVDF)の化学式を示す図である。
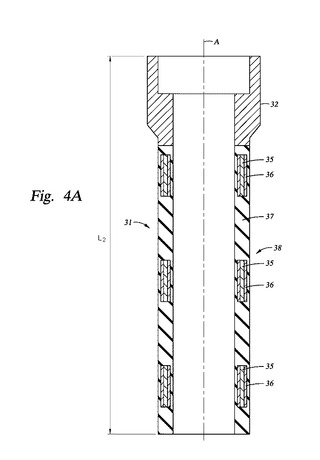
【図4A】円筒形状および軸を有するライザパイプ区間を含み、ライザパイプ区間に関連付けられ、ライザパイプ区間を実質的に外接して囲む1つまたは複数のセンサを含む、本発明の装置の実施形態の概略図である。
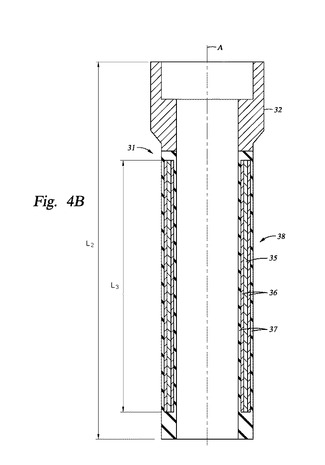
【図4B】円筒形状および軸を有するライザパイプ区間を含み、ライザパイプ区間に関連付けられ、ライザパイプ区間を実質的に外接して囲む1つまたは複数のセンサを含む、本発明の装置の実施形態の概略図である。
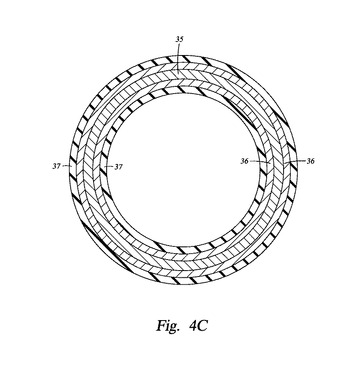
【図4C】円筒形状および軸を有するライザパイプ区間を含み、ライザパイプ区間に関連付けられ、ライザパイプ区間を実質的に外接して囲む1つまたは複数のセンサを含む、本発明の装置の実施形態の概略図である。
【図5】本発明の一実施形態による、海洋ライザ列のための能動的構造ヘルスモニタリングシステムの概略図である。
【図6】本発明の一実施形態による、たとえば複合ライザ内の亀裂の検出など、海洋複合ライザシステムの能動的構造ヘルスモニタリングを行う方法の概略ブロック図である。
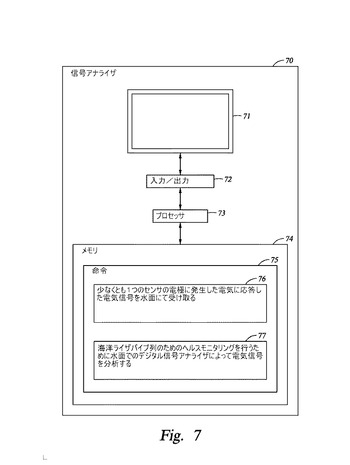
【図7】本発明の一実施形態による信号アナライザの概略ブロック図である。
【発明を実施するための形態】
【0021】
次に本発明について以降で、本発明の実施形態を示す添付の図面を参照して、より十分に述べる。しかし本発明は、多くの異なる形で実施することができ、本明細書に記載された実施形態に限定されると解釈されるべきではない。そうではなくこれらの実施形態は、本開示が十分で完全なものとなり、本発明の範囲を当業者に十分に伝えるように示される。
【0022】
本発明の実施形態は、油漏れ、流出、および環境への関連する影響の防止における、海洋ライザシステムの構造ヘルスモニタリングの有用性に寄与する。たとえば繰り返し応力による亀裂などの、損傷を検出することによって、故障または重大な損傷の前にライザ区間を交換または修理することができる。
【0023】
本出願人は、圧電気に基づく構造ヘルスモニタリング技術は、比較的小さなまたは比較的大きな範囲を迅速にスキャンすることができる、可搬、軽量、自己電力供給型、および(機器および実施が共に)安価なソリューションをもたらすと理解する。さらに本出願人は、図1に示すような海洋ライザシステムは、曲げおよび引張応力および歪みの連続的な発生源となると理解する。通常はライザは、構造体全体を安定に保つために、水面にて張力調整器を用いて張力を加えた状態に保たれる。圧縮を受けたライザは曲がる場合があり、結果として不安定なライザシステムとなる。また船の相対位置ずれまたはプラットフォームシフトによるライザの動きは、ライザパイプ列に沿った曲げ応力および歪みを引き起こす。さらに本出願人は、能動的構造ヘルスモニタリングおよび海中発電用に、海洋ライザシステムによって、ポリフッ化ビニリデン(PVDF)積層体またはフィルムを用いることができると理解する。具体的には本出願人は、海洋ライザパイプ区間の機械的応力および歪みに応答してセンサの電極に電気が発生するように、PVDF積層体またはフィルムを、ライザ複合パイプに埋め込み、ライザ複合パイプに実質的に外接して囲み、振動をベースとする歪みセンサを構成できると理解する。有利にはこのような積層体の実施形態は、複合ライザ内の亀裂を検出する向上された能力をもたらす(単に応力および歪み検出をもたらすだけでなく)。本出願人は、圧電効果によって、接合されたまたは埋め込まれたPVDF積層体からかなりの大きさの電力を発生できると理解する。さらに本出願人は、改善された亀裂検出を含む、海洋ライザシステムにおける能動的構造ヘルスモニタリングおよび海中発電用に圧電気を用いたシステム、装置、および関連する方法の必要性を認識する。
【0024】
PVDFは、図3に示すように、CH2−CF2を反復単位とする分子の長い連鎖からなる半結晶ポリマーである。PVDFの分子量は、2000個の反復単位に対応して約105である。PVDFは、結晶および非晶質の形で得ることができる。4つの結晶形態が、I、II、III、およびpIIとして知られ、またβ、α、γ、およびα(δ)として知られる。センサとして用いられるPVDFフィルムは、機械的および電気的特性を改善するために1軸または2軸方向に延伸され、巻かれる。市販のPVDFフィルムは、通常は逆極性の形態IIの材料である。この材料を圧電性にするために、当業者には理解されるように、たとえば延伸、アニール、熱またはコロナポーリング、および電極の蒸着などの様々なプロセスを経由する。フッ素は、炭素よりずっと電気陰性であるので、フッ素原子は、それらが付随する炭素原子から電子を引き離すことになる。これは、連鎖内の−CF2−基は、フッ素原子上に部分的に負の電荷があり、炭素原子上に部分的に正の電荷がある状態で、非常に有極性となることを意味する。電界中に置かれると、基は整列する。これはすべての−CF2−基が整列しようとしてポリマーを変形させ、分極として知られる状態を生じる。本発明の実施形態ではPVDF積層体は、振動をベースとするセンサとして、カーボンエポキシ複合パイプ内に埋め込むことができる。好ましい実施形態ではPVDFセンサの厚さは、高い感度を得るために50から250ミクロンの範囲とすることができる。
【0025】
当業者には理解されるように、圧電気は、圧電材料の応力T、歪みS、電荷密度変位D、および電界Eがどのように相互作用するかを規定する、材料の構成方程式において数学的に記述することができる。歪み対電荷の形での圧電構成関係は、(1)および(2)で与えられる。
【0026】
D=d・T+εT・E (1)
S=SE・T+d・E (2)
応力対電荷の形でのPVDF構成関係は、(3)および(4)によって与えられる。
【0027】
T=cE・S−eT・E (3)
D=e・S+ε・E (4)
ここでTは応力成分、Sは歪み成分、Eは電界成分である。電気変位Dまたは歪みSを測定するためには、電界強度Eと応力Tの両方を指定する必要がある。PVDFに対するいずれの物理量を定義するときも、機械的および電気的境界条件を指定しなければならない。圧電材料の機械的挙動と電気的挙動の間の関係は、それらの圧電係数によって表される。
【0028】
本発明の実施形態によれば、PVDFは、海洋ライザ列の構造ヘルスモニタリング用に、他の圧電材料と比べて著しい利点をもたらす。たとえばPVDFは、すべての加工可能なフルオロカーボンで最も引張強さが高く、放射線耐性が良い。当業者には理解されるように、PVDFは溶融加工が可能である。PVDFは、金属被覆することができ、複合材料中に埋め込むことが可能であるので本明細書で述べる用途に役立つ。さらにPVDFは、良好な耐摩耗性、および良好な一般的化学耐性を有する。PVDFは、150℃(300°F)の最大使用温度を有する。PVDFは可撓性および耐久性を有し、PVDFは軽量であり比較的低い音響インピーダンスを有する。有利には、PVDFは大きなシートの薄膜の形で入手可能なので製造は高価ではなく、複雑な形状に切断または整形するのが容易である。有益には、PVDFは既存の構造体に一体化することができる。
【0029】
本発明の実施形態は、ライザパイプの長さ全体に対して、または好ましくは海洋ライザパイプ区間31の長さL2の75%より大きな長さL3に対して、パイプの表面領域にPVDFシートを接合する(ライザ結合部を除く)ことを含む。図4Bを参照されたい。本発明の実施形態は、PVDFシートを複合ライザ組立体に埋め込むことを含む。
【0030】
さらに、図2に示すように、組み立てられた海洋ライザパイプ列30の全長L1は、1000フィートより大きくなり得るので、圧電効果によりかなりの量の発電が可能である。この発生された電力は海中で用いることができ、水面からの送電の需要を回避する、または低減することができる。
【0031】
図1〜2に示されるように本発明の実施形態は、たとえば、海洋ライザシステムにおける能動的構造ヘルスモニタリングおよび海中発電のために圧電気を用いたシステム25を含むことができる。当業者には理解されるように、ライザは、水面22から水面下23に延びて海底26までの間の一連のパイプ30である。隣接するライザパイプ区間31は、機械的コネクタ32を用いて連結または結合される。当業者には理解されるように、図4Aおよび4Bに示されるように、コネクタ32はライザ区間31とは別個でもよく、ライザ区間31と一体化した部材でもよい。石油およびガスライザパイプ列30は、順次組み立てられ、当業者には理解されるように水上船舶、掘削装置、またはプラットフォーム21を、たとえばクリスマスツリー、噴出防止装置(BOP)、または下部海洋ライザパッケージ(LMRP)を含む海中機器34に接続する。2つのライザ結合部の間の長さL2は、ライザシステムに対する要件に応じて通常は40から80フィートの間で変わる。図4Aおよび4Bを参照されたい。組み立てられた海洋ライザパイプ列30の全長L1は、1000フィートより大きくなり得る。
【0032】
図1〜2にさらに示されるように、ライザ列30のための構造ヘルスモニタリングシステム25は、具体的には電極36での関連するセンサ38を含む個々のライザパイプ区間31を水面、具体的にはデジタル信号プロセッサ70に接続する伝送線路45を含むことができる。典型的にはデジタル信号プロセッサ70は、水上船舶、掘削装置、またはプラットフォーム21上に配置されることになる。システム25はまた、デジタル信号プロセッサ70のための遠隔の陸上の場所24を設けるための衛星27、および関連する送信器/受信器28を含むことができる。図7を参照されたい。当業者には理解されるように、無線周波数(RF)伝送方式および電力線通信などの他の知られている通信手法は、本発明の実施形態の範囲に包含される。
【0033】
図3に示すように、PVDFは、CH2−CF2を反復単位とする分子の長い連鎖からなる半結晶ポリマーである。
【0034】
図4A、4B、および4Cに示されるように、本発明の実施形態は、たとえば装置を含む。装置は、たとえば海洋ライザパイプ区間31を含むことができる。海洋ライザパイプ区間31は、円筒形状33を有することができる。海洋ライザパイプ区間31は、軸Aを有することができる。海洋ライザパイプ区間31は、カーボンエポキシ基材37を有することができる。装置はまた、たとえば、海洋ライザパイプ区間31に関連付けられ、海洋ライザパイプ区間31を実質的に外接して囲むセンサ38を含むことができる。センサ38は、たとえば約50ミクロンから約250ミクロンの間の厚さを有するポリフッ化ビニリデン積層体35と、電極36、たとえば導電性銀インク被覆とを含むことができる。センサ38は、海洋ライザパイプ区間31の機械的応力および歪み(たとえば、振動による)に応答してセンサ38の電極36に電気を発生するように構成することができる。たとえばセンサ38は、海洋ライザパイプ31のカーボンエポキシ基材37の層の間に埋め込むことができる。
【0035】
さらに図4Bに示すように、センサ38は、海洋ライザパイプ区間31の長さL2の75%より大きな長さL3に対して海洋ライザパイプ区間31の軸Aに沿って延在することができる。あるいは図4Aに示すように、複数のセンサ38を海洋ライザパイプ区間31の軸Aに沿ってほぼ均等の間隔で配置することができる。
【0036】
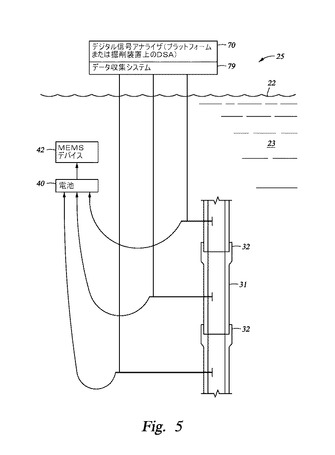
図5に示すように本発明の実施形態は、たとえば、ライザ列30のための構造ヘルスモニタリングシステム25を含む。システム25は、たとえば海洋ライザパイプ列30を含むことができる。ライザ列30は、複数のライザパイプ区間31と、複数のライザコネクタ32とを含むことができる。ライザパイプ区間31は、円筒形状と、軸と、カーボンエポキシ基材と、電極、およびライザパイプ区間を実質的に外接して囲むポリフッ化ビニリデン積層体を備えるセンサとを含むことができる。図4Cを参照されたい。システム25は、たとえば、複数のライザパイプ区間用のセンサの電極に発生した電気に応答した電気信号を捕捉し、デジタル化し、分析するため、および海洋ライザパイプ列のためのヘルスモニタリングを行うために、おそらく水面22に配置されたデジタル信号アナライザ70と、データ収集システム79とを含むことができる。図7も参照されたい。
【0037】
好ましい実施形態では、データ収集システム(DAQ)ボード上の複数のチャネルを通してデータ収集システムを用いて、各ライザ区間から少なくとも1つの信号が収集される。伝送線路に沿って信号ブースト装置を含むこともできる。DAQボードからの出力信号は、デジタル信号アナライザへの入力となり、デジタル信号アナライザは、損傷検出のために信号をフィルタし分析することができる。当業者には理解されるようにデジタル信号アナライザは通常は、固有振動数の最初の少数のモードを監視するために、高速フーリエ変換(FFT)を用いて伝達関数(入力/出力)を取得する。あるいは、他の周波数分析技術を用いてもよい。損傷がある場合は、構造体の固有振動数がシフトし、損傷を検出することができる。たとえば、データ収集システム(DAQ)ボード上の異なる入力/出力チャネルを通して、40個の異なるライザ区間からの40個の信号を監視することができる。いずれかの特定の、たとえば上から5番目のライザ区間からの固有振動数の著しいまたは大きなシフトは、その区間、すなわち5番目のライザ区間における損傷を示す。
【0038】
システム25はさらに、たとえば、発生した電気からのエネルギーを蓄積するための水面下エネルギー蓄積デバイス40を含むことができる。システム25は、たとえば、水面下エネルギー蓄積デバイス40に結合された、複数の水面下微小電気機械デバイス42を含むことができる。たとえば水面下微小電気機械デバイス42は、たとえばクリスマスツリー、噴出防止装置(BOP)、または下部海洋ライザパッケージ(LMRP)を含む海中機器34の一部とすることができる。
【0039】
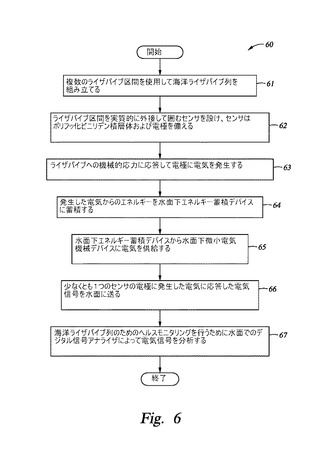
図6に示されるように本発明の実施形態は、たとえば、海洋複合ライザシステムの能動的構造ヘルスモニタリングを行う、たとえば複合ライザ内の亀裂を検出する、方法60を含む。方法60は、たとえば61に示すように、複数のライザパイプ区間31を用いて、海洋ライザパイプ列30(たとえば、組み立てられた海洋ライザパイプ列30の全長L1は1000フィートより大きい)を組み立てるステップを含むことができる。複数のライザパイプ区間31のそれぞれは、軸Aを有する円筒形状33を含むことができる。複数のライザパイプ区間31の少なくとも1つのライザパイプ区間は、カーボンエポキシ基材37を含むことができる。方法60は、たとえば62に示すように、少なくとも1つのライザパイプ区間に少なくとも1つのセンサ38を設けるステップを含むことができる。少なくとも1つのセンサ38は、少なくとも1つのライザパイプ区間31を実質的に外接して囲むことができる。少なくとも1つのセンサ38は、たとえば約50ミクロンから約250ミクロンの間の厚さを有するポリフッ化ビニリデン積層体35を含むことができる。少なくとも1つのセンサ38は、電極36、たとえば導電性銀インク被覆を含むことができる。方法60は、たとえば63に示すように、少なくとも1つのライザパイプ区間31の機械的応力および歪み(たとえば、振動による)に応答して、少なくとも1つのセンサ38の電極36に電気を発生するステップを含むことができる。
【0040】
方法60はまた、たとえば66に示すように、少なくとも1つのセンサ38の電極36に発生した電気に応答した電気信号を水面22に送るステップを含むことができる。当業者には理解されるように、送信は、図2に示されるように伝送線路45、または無線周波数(RF)伝送方式を使用することができる。方法60は、たとえば67に示すように、海洋ライザパイプ列30のためのヘルスモニタリングを行うために、水面22でのデジタル信号アナライザ70によって電気信号を分析するステップを含むことができる。ヘルスモニタリングは、当業者には理解されるように、たとえば衝撃損傷および疲労亀裂発生などの損傷検出を含むことができる。
【0041】
方法60はさらに、たとえば64に示すように、発生した電気からのエネルギーを水面下エネルギー蓄積デバイス40に蓄積するステップを含むことができる。方法60は、たとえば65に示すように、水面下エネルギー蓄積デバイス40から水面下微小電気機械デバイス42に電気を供給するステップを含むことができる。
【0042】
図7に示されるように、ライザ列のための構造ヘルスモニタリングシステム25の実施形態は、デジタル信号アナライザ70を含むことができる。デジタル信号アナライザ70は、水面22にまたは水面22上に、典型的には水上船舶、掘削装置、またはプラットフォーム21上に配置することができ、あるいは(図1に示されるように)陸上の場所24に配置することができる。デジタル信号アナライザ70は、たとえば、電気信号を分析するように配置されたプロセッサ73を含むことができる。デジタル信号アナライザ70は、たとえば、複数のライザパイプ区間用のセンサの電極に発生した電気に応答した電気信号を受け取るための入力/出力デバイス72を含むことができる。デジタル信号アナライザ70は、たとえばディスプレイ71を含むことができる。デジタル信号アナライザ70は、たとえば、コンピュータプログラム製品75がその中に記憶された、メモリ74を含むことができる。コンピュータプログラム製品75は、有形で永続的なコンピュータメモリ媒体74上に記憶され、プロセッサ73上で動作可能であり、プロセッサ73によって実行されたときに、様々な動作を実行することによって海洋ライザパイプ列のためのヘルスモニタリングをデジタル信号アナライザ70に行わせる1組の命令を含む。動作は、76に示すように、複数のライザパイプ区間31用のセンサの電極に発生した電気に応答した電気信号を、入力/出力デバイス72によって受け取ることを含むことができる。動作は、77に示すように、海洋ライザパイプ列30のためのヘルスモニタリングを行うために、プロセッサ73によって電気信号を分析することを含むことができる。当業者には理解されるように、このような分析は一般に、曲げおよび張力を受けたライザ列30からの圧電効果をモデル化するために、マルチ物理モデリングおよびシミュレーション技術を含むことができる。マルチ物理モデリングは、機械的、電気的、および磁気的などの異なる場との相互作用が存在するシミュレーションを含む。圧電気の分析では、構造的な応力対電荷、および歪み対電荷の材料特性を用いて構造的な場と電界とが結合され、これは直接結合と呼ばれる。別法として順次結合は、たとえば構造解析の出力が電気的解析への入力となる。
【0043】
さらに図1に示されるように、デジタル信号アナライザ70はまた、内部または外部メモリに記憶された1つまたは複数のデータベース78を含むことができ、またはそれらにアクセスすることができる。
【0044】
当業者なら、様々なタイプのメモリが、本明細書で述べられるようなコンピュータ、たとえばデジタル信号アナライザ、または本発明の実施形態を有する他のコンピュータなどによって読み取り可能であることが理解されよう。コンピュータ可読媒体の例は、非限定的に、不揮発性、リードオンリメモリ(ROM)などのハードコードタイプの媒体、CD−ROM、およびDVD−ROM、または消去可能、電気的プログラマブルリードオンリメモリ(EEPROM)、フロッピー(商標)ディスク、ハードディスクドライブ、CD−R/RW、DVD−RAM、DVD−R/RW、DVD+R/RW、フラッシュドライブ、メモリスティックなどの記録可能型媒体、および他の新しいタイプのメモリ、ならびにデジタルおよびアナログ通信リンクなどの伝送型媒体を含む。このような媒体は、たとえば動作命令、ならびに上述のシステムおよび方法のステップに関係する命令を含むことができ、コンピュータ上で動作することができる。当業者にはこのような媒体は、たとえばソフトウェアを含むプログラム製品をその中に記憶するために、述べられた場所の代わりにまたはそれに加えて他の場所に配置することができることが理解されよう。当業者には理解されるようにこれらのコンピュータまたはサーバのそれぞれは、たとえばこれらの様々なタイプのメモリの1つまたは複数を有することができる。
【0045】
さらに当業者なら、本明細書で述べた実施形態を実施するのに、C++、VisualBasic、Fortran、Java(商標)、HTML、および他のプログラミング言語を含む様々なタイプのソフトウェア言語および開発環境を使用できることが理解されよう。
【0046】
図面および明細書において本発明の典型的な好ましい実施形態が開示され、特定の用語が用いられたが説明の意味のみで用いられたものであり、限定するために用いられたものではない。本発明について、これらの例示の実施形態を具体的に参照してかなり詳細に述べてきた。しかし、上記の明細書に述べた本発明の趣旨および範囲内において様々な変更形態および変形形態が可能であることが明らかであろう。
【符号の説明】
【0047】
21 プラットフォーム
22 水面
23 水面下
24 陸上の場所
25 構造ヘルスモニタリングシステム
26 海底
27 衛星
28 送信器/受信器
30 海洋ライザパイプ列
31 海洋ライザパイプ区間
32 機械的コネクタ
34 海中機器
35 ポリフッ化ビニリデン積層体
36 電極
37 カーボンエポキシ基材
38 センサ
40 水面下エネルギー蓄積デバイス
42 水面下微小電気機械デバイス
45 伝送線路
60 方法
70 デジタル信号プロセッサ、デジタル信号アナライザ
71 ディスプレイ
72 入力/出力デバイス
73 プロセッサ
74 メモリ
75 コンピュータプログラム製品
78 データベース
79 データ収集システム
【技術分野】
【0001】
本発明は、石油およびガス産業に関する。より詳細には本発明は、生産段階での海洋複合ライザシステムの能動的構造ヘルスモニタリングに関する。
【背景技術】
【0002】
石油およびガス産業において、ライザは、水面と海底の間の一連のパイプである。石油およびガスライザパイプ列は、順次組み立てられ、当業者には理解されるように、水上船舶、掘削装置、またはプラットフォームを、たとえばクリスマスツリー、噴出防止装置(BOP)、または下部海洋ライザパッケージ(LMRP)を含む海中機器に接続する。
【0003】
海での通常の現地敷設時には、海洋ライザパイプは船の甲板から個々に持ち上げられ、ライザスパイダにおいて互いに接続され、降ろされる。2つのライザパイプは、機械的コネクタを用いて連結または結合される。2つのライザ結合部の間の長さは、ライザシステムに対する要件に応じて通常は40から80フィートの間で変わる。
【0004】
参照によりその全体が本明細書に組み込まれる、本願の所有者が所有する米国特許出願第12/029,376号などには、ライザライフサイクル管理システム(RLMS)が述べられている。このようなライザライフサイクル管理システムは、たとえば、特定の船に割り当てられたすべてのライザ資産のリストを資産管理者に提供し、さらに現在展開されている、甲板上にある、および保守のために除外されている資産の内訳、それと共に予定された返却日、来るべき計画された保守イベントのリスト、特定のライザ資産によって拡大される動作寿命の推定、および特定のライザ資産によって使用された総動作寿命の推定を、最も損傷を与える事象(すなわち、ある種のハリケーン事象)の詳細と共に提供することができる。
【0005】
圧電気は、機械的歪みおよび応力を受けた誘電体結晶内で電気または電気的極性が生じること、あるいは印加電圧を受けたこのような結晶内で歪みおよび応力が生じることである。
【0006】
既存の構造ヘルスモニタリング手法および技術は、すべて様々な利点、欠点、およびトレードオフを有する。
【0007】
たとえばX線透視法は、内部損傷および広がりを検出することができ、比較的簡単であり、結果の永久的な記録(すなわち、X線画像)を生成することができる。しかしX線透視法は、実施に費用がかかり、高価な機器を必要とし、時間がかかり、正しく解釈するにはスキルを要する。したがってX線透視法は、完全には自動化されていない(すなわち作業者を必要とする)。
【0008】
たとえば歪みゲージは、構造ヘルスモニタリングにとって軽量であり、低電力で動作する。歪みゲージは可搬であり、表面実装することができ、手順が比較的簡単である。しかし歪みゲージは、実施に費用がかかり、高価な機器を必要とする。
【0009】
たとえば光ファイバは、一般に、構造ヘルスモニタリングに安価な機器を用いて広い範囲をカバーすることができる軽量なソリューションである。しかし光ファイバは、実施に費用がかかり、診断プロセスにおいてレーザを必要とし、光ファイバは構造ヘルスモニタリングソリューション内に埋め込まれなければならない。
【0010】
たとえば超音波構造ヘルスモニタリングソリューションは、可搬であり、小さな損傷に感度があり、広い範囲を迅速にスキャンする。しかし超音波構造ヘルスモニタリングソリューションは、非常に高価な機器を使用し、複雑な結果を生じ、動作のために特殊なシステムを必要とする。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】米国特許出願公開第2008/0249720号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
上記に鑑みて、本出願人は、圧電気に基づく構造ヘルスモニタリング技術なら、比較的小さなまたは比較的大きな範囲を迅速にスキャンすることができる、可搬、軽量、低電力、および(機器および実施が共に)安価なソリューションがもたらされると理解する。さらに本出願人は、海洋ライザシステムは、曲げおよび引張応力および歪みの連続的な発生源となると理解する。通常はライザは、構造体全体を安定に保つために、水面にて張力調整器を用いて張力を加えた状態に保たれる。圧縮を受けたライザは曲がる場合があり、結果として不安定なライザシステムとなる。また船の相対位置ずれまたはプラットフォームシフトによるライザの動きは、ライザパイプ列に沿った曲げ応力および歪みを引き起こす。さらに本出願人は、能動的構造ヘルスモニタリングおよび海中発電用に、海洋ライザシステムによって、ポリフッ化ビニリデン(PVDF)積層体またはフィルムを用いることができると理解する。PVDFは、CH2−CF2を反復単位とする分子の長い連鎖からなる半結晶ポリマーである。具体的には本出願人は、海洋ライザパイプ区間の機械的応力および歪みに応答してセンサの電極に電気が発生するように、PVDF積層体またはフィルムを、ライザ複合パイプに埋め込み、ライザ複合パイプに実質的に外接して囲み、振動をベースとする歪みセンサを構成できると理解する。有利にはこのような積層体の実施形態は、複合ライザ内の亀裂を検出する向上された能力をもたらす(単に応力および歪み検出をもたらすだけでなく)。本出願人は、圧電効果によって、接合されたまたは埋め込まれたPVDF積層体からかなりの大きさの電力を発生できると理解する。さらに本出願人は、改善された亀裂検出を含む、海洋ライザシステムにおける能動的構造ヘルスモニタリングおよび海中発電用に圧電気を用いたシステム、装置、および関連する方法の必要性を認識する。
【課題を解決するための手段】
【0013】
本発明の実施形態は、たとえばライザ列のための構造ヘルスモニタリングシステムを含む。システムは、海洋ライザパイプ列を含むことができる。海洋ライザパイプ列は、複数のライザパイプ区間と、複数のライザコネクタとを含むことができる。複数のライザパイプ区間のそれぞれは、軸と、カーボンエポキシ基材と、センサとを有する円筒形状を含むことができる。センサは、電極と、ライザパイプ区間を実質的に外接して囲むポリフッ化ビニリデン(PVDF)積層体とを含むことができ、それにより、(より小さい占有面積を有する)より小さな圧電センサに勝る向上されたライザ亀裂検出をもたらす。センサは、ライザパイプ区間の機械的応力および歪みに応答して電極に電気を発生するように構成することができる。システムはさらに、複数のライザパイプ区間用のセンサの電極に発生した電気に応答した電気信号を捕捉し、デジタル化し、分析し、海洋ライザパイプ列のためのヘルスモニタリングをもたらすための、たとえば水面に配置されたデータ収集システムと、デジタル信号アナライザとを含むことができる。
【0014】
デジタル信号アナライザの実施形態は、たとえば、プロセッサと、入力/出力デバイスと、その中にコンピュータプログラム製品が記憶された有形で永続的なメモリとを含むことができる。コンピュータプログラム製品は、プロセッサによって実行されたときに、様々な動作を実行することによって海洋ライザパイプ列のためのヘルスモニタリングをデジタル信号アナライザに行わせる、1組の命令を含むことができる。動作は、入力/出力デバイスによって、複数のライザパイプ区間用のセンサの電極に発生した電気に応答した電気信号を受け取ることを含むことができる。動作はまた、プロセッサによって、海洋ライザパイプ列のためのヘルスモニタリングを行うために電気信号を分析することを含むことができる。
【0015】
本発明の実施形態は、たとえば、複合ライザ内の亀裂を検出する方法を含む。方法は、複数のライザパイプ区間を使用して海洋ライザパイプ列を組み立てるステップを含む。複数のライザパイプ区間のそれぞれは、軸を有する円筒形状を含むことができ、複数のライザパイプ区間の少なくとも1つのライザパイプ区間は、カーボンエポキシ基材を含むことができる。方法は、少なくとも1つのライザパイプ区間に少なくとも1つのセンサを設けるステップを含むことができ、センサはライザパイプ区間を実質的に外接して囲む。センサは、ポリフッ化ビニリデン積層体と、電極とを含むことができる。方法は、ライザパイプ区間の機械的応力および歪みに応答してセンサの電極に電気を発生するステップを含むことができる。方法は、電気信号を分析するステップを含むことができ、電気信号は少なくとも1つのセンサの電極に発生した電気に応答し、それによって少なくとも1つのライザパイプ区間内の亀裂を検出する。方法はさらに、データ収集システムと、デジタル信号アナライザとを含むことができる。
【0016】
方法の実施形態はさらに、発生した電気からのエネルギーを水面下エネルギー蓄積デバイスに蓄積するステップと、水面下エネルギー蓄積デバイスから水面下微小電気機械デバイスに電気を供給するステップとを含むことができる。
【0017】
本発明の実施形態は、たとえば装置を含む。装置は、たとえば、円筒形状および軸を有する海洋ライザパイプ区間を含むことができる。海洋ライザパイプ区間は、カーボンエポキシ基材を含むことができる。装置はまた、海洋ライザパイプ区間に関連付けられ、海洋ライザパイプ区間を実質的に外接して囲むセンサを含むことができる。センサは、ポリフッ化ビニリデン積層体と、電極とを含むことができる。センサは、海洋ライザパイプ区間の機械的応力および歪みに応答してセンサの電極に電気を発生するように構成することができる。装置の実施形態はさらに、約50ミクロンから約250ミクロンの間のポリフッ化ビニリデン積層体の厚さと、導電性銀インク被覆を含む電極とを含むことができる。
【0018】
他の従来のソリューションは、センサを海洋ライザ上にばらばらに取り付けており、ライザ区間を実質的に外接して囲む、またはライザパイプ区間の長さの75%より大きな長さに対してライザパイプ区間の軸に沿って延在する圧電気センサは述べていない。他の従来技術のソリューションは、本明細書に述べられる向上された亀裂検出機能を含む、PVDFの実施形態およびそれらの応用を認識していない。
【0019】
本発明の特徴および利点、ならびに明らかとなるその他をより詳細に理解できるように、本明細書の一部となる添付の図面に示されるその実施形態を参照することによって、上記に簡潔にまとめた本発明のより具体的な説明が得られよう。しかし図面は、本発明の様々な実施形態のみを示し、したがって、本発明は他の有効な実施形態も含み得るので、本発明の範囲を限定すると見なされるべきでないことに留意されたい。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施形態による、海洋ライザ列のための能動的構造ヘルスモニタリングシステムの環境を示す図である。
【図2】本発明の一実施形態による、海洋ライザ列のための能動的構造ヘルスモニタリングシステムの概略図である。
【図3】本発明の一実施形態による、ポリフッ化ビニリデン(PVDF)の化学式を示す図である。
【図4A】円筒形状および軸を有するライザパイプ区間を含み、ライザパイプ区間に関連付けられ、ライザパイプ区間を実質的に外接して囲む1つまたは複数のセンサを含む、本発明の装置の実施形態の概略図である。
【図4B】円筒形状および軸を有するライザパイプ区間を含み、ライザパイプ区間に関連付けられ、ライザパイプ区間を実質的に外接して囲む1つまたは複数のセンサを含む、本発明の装置の実施形態の概略図である。
【図4C】円筒形状および軸を有するライザパイプ区間を含み、ライザパイプ区間に関連付けられ、ライザパイプ区間を実質的に外接して囲む1つまたは複数のセンサを含む、本発明の装置の実施形態の概略図である。
【図5】本発明の一実施形態による、海洋ライザ列のための能動的構造ヘルスモニタリングシステムの概略図である。
【図6】本発明の一実施形態による、たとえば複合ライザ内の亀裂の検出など、海洋複合ライザシステムの能動的構造ヘルスモニタリングを行う方法の概略ブロック図である。
【図7】本発明の一実施形態による信号アナライザの概略ブロック図である。
【発明を実施するための形態】
【0021】
次に本発明について以降で、本発明の実施形態を示す添付の図面を参照して、より十分に述べる。しかし本発明は、多くの異なる形で実施することができ、本明細書に記載された実施形態に限定されると解釈されるべきではない。そうではなくこれらの実施形態は、本開示が十分で完全なものとなり、本発明の範囲を当業者に十分に伝えるように示される。
【0022】
本発明の実施形態は、油漏れ、流出、および環境への関連する影響の防止における、海洋ライザシステムの構造ヘルスモニタリングの有用性に寄与する。たとえば繰り返し応力による亀裂などの、損傷を検出することによって、故障または重大な損傷の前にライザ区間を交換または修理することができる。
【0023】
本出願人は、圧電気に基づく構造ヘルスモニタリング技術は、比較的小さなまたは比較的大きな範囲を迅速にスキャンすることができる、可搬、軽量、自己電力供給型、および(機器および実施が共に)安価なソリューションをもたらすと理解する。さらに本出願人は、図1に示すような海洋ライザシステムは、曲げおよび引張応力および歪みの連続的な発生源となると理解する。通常はライザは、構造体全体を安定に保つために、水面にて張力調整器を用いて張力を加えた状態に保たれる。圧縮を受けたライザは曲がる場合があり、結果として不安定なライザシステムとなる。また船の相対位置ずれまたはプラットフォームシフトによるライザの動きは、ライザパイプ列に沿った曲げ応力および歪みを引き起こす。さらに本出願人は、能動的構造ヘルスモニタリングおよび海中発電用に、海洋ライザシステムによって、ポリフッ化ビニリデン(PVDF)積層体またはフィルムを用いることができると理解する。具体的には本出願人は、海洋ライザパイプ区間の機械的応力および歪みに応答してセンサの電極に電気が発生するように、PVDF積層体またはフィルムを、ライザ複合パイプに埋め込み、ライザ複合パイプに実質的に外接して囲み、振動をベースとする歪みセンサを構成できると理解する。有利にはこのような積層体の実施形態は、複合ライザ内の亀裂を検出する向上された能力をもたらす(単に応力および歪み検出をもたらすだけでなく)。本出願人は、圧電効果によって、接合されたまたは埋め込まれたPVDF積層体からかなりの大きさの電力を発生できると理解する。さらに本出願人は、改善された亀裂検出を含む、海洋ライザシステムにおける能動的構造ヘルスモニタリングおよび海中発電用に圧電気を用いたシステム、装置、および関連する方法の必要性を認識する。
【0024】
PVDFは、図3に示すように、CH2−CF2を反復単位とする分子の長い連鎖からなる半結晶ポリマーである。PVDFの分子量は、2000個の反復単位に対応して約105である。PVDFは、結晶および非晶質の形で得ることができる。4つの結晶形態が、I、II、III、およびpIIとして知られ、またβ、α、γ、およびα(δ)として知られる。センサとして用いられるPVDFフィルムは、機械的および電気的特性を改善するために1軸または2軸方向に延伸され、巻かれる。市販のPVDFフィルムは、通常は逆極性の形態IIの材料である。この材料を圧電性にするために、当業者には理解されるように、たとえば延伸、アニール、熱またはコロナポーリング、および電極の蒸着などの様々なプロセスを経由する。フッ素は、炭素よりずっと電気陰性であるので、フッ素原子は、それらが付随する炭素原子から電子を引き離すことになる。これは、連鎖内の−CF2−基は、フッ素原子上に部分的に負の電荷があり、炭素原子上に部分的に正の電荷がある状態で、非常に有極性となることを意味する。電界中に置かれると、基は整列する。これはすべての−CF2−基が整列しようとしてポリマーを変形させ、分極として知られる状態を生じる。本発明の実施形態ではPVDF積層体は、振動をベースとするセンサとして、カーボンエポキシ複合パイプ内に埋め込むことができる。好ましい実施形態ではPVDFセンサの厚さは、高い感度を得るために50から250ミクロンの範囲とすることができる。
【0025】
当業者には理解されるように、圧電気は、圧電材料の応力T、歪みS、電荷密度変位D、および電界Eがどのように相互作用するかを規定する、材料の構成方程式において数学的に記述することができる。歪み対電荷の形での圧電構成関係は、(1)および(2)で与えられる。
【0026】
D=d・T+εT・E (1)
S=SE・T+d・E (2)
応力対電荷の形でのPVDF構成関係は、(3)および(4)によって与えられる。
【0027】
T=cE・S−eT・E (3)
D=e・S+ε・E (4)
ここでTは応力成分、Sは歪み成分、Eは電界成分である。電気変位Dまたは歪みSを測定するためには、電界強度Eと応力Tの両方を指定する必要がある。PVDFに対するいずれの物理量を定義するときも、機械的および電気的境界条件を指定しなければならない。圧電材料の機械的挙動と電気的挙動の間の関係は、それらの圧電係数によって表される。
【0028】
本発明の実施形態によれば、PVDFは、海洋ライザ列の構造ヘルスモニタリング用に、他の圧電材料と比べて著しい利点をもたらす。たとえばPVDFは、すべての加工可能なフルオロカーボンで最も引張強さが高く、放射線耐性が良い。当業者には理解されるように、PVDFは溶融加工が可能である。PVDFは、金属被覆することができ、複合材料中に埋め込むことが可能であるので本明細書で述べる用途に役立つ。さらにPVDFは、良好な耐摩耗性、および良好な一般的化学耐性を有する。PVDFは、150℃(300°F)の最大使用温度を有する。PVDFは可撓性および耐久性を有し、PVDFは軽量であり比較的低い音響インピーダンスを有する。有利には、PVDFは大きなシートの薄膜の形で入手可能なので製造は高価ではなく、複雑な形状に切断または整形するのが容易である。有益には、PVDFは既存の構造体に一体化することができる。
【0029】
本発明の実施形態は、ライザパイプの長さ全体に対して、または好ましくは海洋ライザパイプ区間31の長さL2の75%より大きな長さL3に対して、パイプの表面領域にPVDFシートを接合する(ライザ結合部を除く)ことを含む。図4Bを参照されたい。本発明の実施形態は、PVDFシートを複合ライザ組立体に埋め込むことを含む。
【0030】
さらに、図2に示すように、組み立てられた海洋ライザパイプ列30の全長L1は、1000フィートより大きくなり得るので、圧電効果によりかなりの量の発電が可能である。この発生された電力は海中で用いることができ、水面からの送電の需要を回避する、または低減することができる。
【0031】
図1〜2に示されるように本発明の実施形態は、たとえば、海洋ライザシステムにおける能動的構造ヘルスモニタリングおよび海中発電のために圧電気を用いたシステム25を含むことができる。当業者には理解されるように、ライザは、水面22から水面下23に延びて海底26までの間の一連のパイプ30である。隣接するライザパイプ区間31は、機械的コネクタ32を用いて連結または結合される。当業者には理解されるように、図4Aおよび4Bに示されるように、コネクタ32はライザ区間31とは別個でもよく、ライザ区間31と一体化した部材でもよい。石油およびガスライザパイプ列30は、順次組み立てられ、当業者には理解されるように水上船舶、掘削装置、またはプラットフォーム21を、たとえばクリスマスツリー、噴出防止装置(BOP)、または下部海洋ライザパッケージ(LMRP)を含む海中機器34に接続する。2つのライザ結合部の間の長さL2は、ライザシステムに対する要件に応じて通常は40から80フィートの間で変わる。図4Aおよび4Bを参照されたい。組み立てられた海洋ライザパイプ列30の全長L1は、1000フィートより大きくなり得る。
【0032】
図1〜2にさらに示されるように、ライザ列30のための構造ヘルスモニタリングシステム25は、具体的には電極36での関連するセンサ38を含む個々のライザパイプ区間31を水面、具体的にはデジタル信号プロセッサ70に接続する伝送線路45を含むことができる。典型的にはデジタル信号プロセッサ70は、水上船舶、掘削装置、またはプラットフォーム21上に配置されることになる。システム25はまた、デジタル信号プロセッサ70のための遠隔の陸上の場所24を設けるための衛星27、および関連する送信器/受信器28を含むことができる。図7を参照されたい。当業者には理解されるように、無線周波数(RF)伝送方式および電力線通信などの他の知られている通信手法は、本発明の実施形態の範囲に包含される。
【0033】
図3に示すように、PVDFは、CH2−CF2を反復単位とする分子の長い連鎖からなる半結晶ポリマーである。
【0034】
図4A、4B、および4Cに示されるように、本発明の実施形態は、たとえば装置を含む。装置は、たとえば海洋ライザパイプ区間31を含むことができる。海洋ライザパイプ区間31は、円筒形状33を有することができる。海洋ライザパイプ区間31は、軸Aを有することができる。海洋ライザパイプ区間31は、カーボンエポキシ基材37を有することができる。装置はまた、たとえば、海洋ライザパイプ区間31に関連付けられ、海洋ライザパイプ区間31を実質的に外接して囲むセンサ38を含むことができる。センサ38は、たとえば約50ミクロンから約250ミクロンの間の厚さを有するポリフッ化ビニリデン積層体35と、電極36、たとえば導電性銀インク被覆とを含むことができる。センサ38は、海洋ライザパイプ区間31の機械的応力および歪み(たとえば、振動による)に応答してセンサ38の電極36に電気を発生するように構成することができる。たとえばセンサ38は、海洋ライザパイプ31のカーボンエポキシ基材37の層の間に埋め込むことができる。
【0035】
さらに図4Bに示すように、センサ38は、海洋ライザパイプ区間31の長さL2の75%より大きな長さL3に対して海洋ライザパイプ区間31の軸Aに沿って延在することができる。あるいは図4Aに示すように、複数のセンサ38を海洋ライザパイプ区間31の軸Aに沿ってほぼ均等の間隔で配置することができる。
【0036】
図5に示すように本発明の実施形態は、たとえば、ライザ列30のための構造ヘルスモニタリングシステム25を含む。システム25は、たとえば海洋ライザパイプ列30を含むことができる。ライザ列30は、複数のライザパイプ区間31と、複数のライザコネクタ32とを含むことができる。ライザパイプ区間31は、円筒形状と、軸と、カーボンエポキシ基材と、電極、およびライザパイプ区間を実質的に外接して囲むポリフッ化ビニリデン積層体を備えるセンサとを含むことができる。図4Cを参照されたい。システム25は、たとえば、複数のライザパイプ区間用のセンサの電極に発生した電気に応答した電気信号を捕捉し、デジタル化し、分析するため、および海洋ライザパイプ列のためのヘルスモニタリングを行うために、おそらく水面22に配置されたデジタル信号アナライザ70と、データ収集システム79とを含むことができる。図7も参照されたい。
【0037】
好ましい実施形態では、データ収集システム(DAQ)ボード上の複数のチャネルを通してデータ収集システムを用いて、各ライザ区間から少なくとも1つの信号が収集される。伝送線路に沿って信号ブースト装置を含むこともできる。DAQボードからの出力信号は、デジタル信号アナライザへの入力となり、デジタル信号アナライザは、損傷検出のために信号をフィルタし分析することができる。当業者には理解されるようにデジタル信号アナライザは通常は、固有振動数の最初の少数のモードを監視するために、高速フーリエ変換(FFT)を用いて伝達関数(入力/出力)を取得する。あるいは、他の周波数分析技術を用いてもよい。損傷がある場合は、構造体の固有振動数がシフトし、損傷を検出することができる。たとえば、データ収集システム(DAQ)ボード上の異なる入力/出力チャネルを通して、40個の異なるライザ区間からの40個の信号を監視することができる。いずれかの特定の、たとえば上から5番目のライザ区間からの固有振動数の著しいまたは大きなシフトは、その区間、すなわち5番目のライザ区間における損傷を示す。
【0038】
システム25はさらに、たとえば、発生した電気からのエネルギーを蓄積するための水面下エネルギー蓄積デバイス40を含むことができる。システム25は、たとえば、水面下エネルギー蓄積デバイス40に結合された、複数の水面下微小電気機械デバイス42を含むことができる。たとえば水面下微小電気機械デバイス42は、たとえばクリスマスツリー、噴出防止装置(BOP)、または下部海洋ライザパッケージ(LMRP)を含む海中機器34の一部とすることができる。
【0039】
図6に示されるように本発明の実施形態は、たとえば、海洋複合ライザシステムの能動的構造ヘルスモニタリングを行う、たとえば複合ライザ内の亀裂を検出する、方法60を含む。方法60は、たとえば61に示すように、複数のライザパイプ区間31を用いて、海洋ライザパイプ列30(たとえば、組み立てられた海洋ライザパイプ列30の全長L1は1000フィートより大きい)を組み立てるステップを含むことができる。複数のライザパイプ区間31のそれぞれは、軸Aを有する円筒形状33を含むことができる。複数のライザパイプ区間31の少なくとも1つのライザパイプ区間は、カーボンエポキシ基材37を含むことができる。方法60は、たとえば62に示すように、少なくとも1つのライザパイプ区間に少なくとも1つのセンサ38を設けるステップを含むことができる。少なくとも1つのセンサ38は、少なくとも1つのライザパイプ区間31を実質的に外接して囲むことができる。少なくとも1つのセンサ38は、たとえば約50ミクロンから約250ミクロンの間の厚さを有するポリフッ化ビニリデン積層体35を含むことができる。少なくとも1つのセンサ38は、電極36、たとえば導電性銀インク被覆を含むことができる。方法60は、たとえば63に示すように、少なくとも1つのライザパイプ区間31の機械的応力および歪み(たとえば、振動による)に応答して、少なくとも1つのセンサ38の電極36に電気を発生するステップを含むことができる。
【0040】
方法60はまた、たとえば66に示すように、少なくとも1つのセンサ38の電極36に発生した電気に応答した電気信号を水面22に送るステップを含むことができる。当業者には理解されるように、送信は、図2に示されるように伝送線路45、または無線周波数(RF)伝送方式を使用することができる。方法60は、たとえば67に示すように、海洋ライザパイプ列30のためのヘルスモニタリングを行うために、水面22でのデジタル信号アナライザ70によって電気信号を分析するステップを含むことができる。ヘルスモニタリングは、当業者には理解されるように、たとえば衝撃損傷および疲労亀裂発生などの損傷検出を含むことができる。
【0041】
方法60はさらに、たとえば64に示すように、発生した電気からのエネルギーを水面下エネルギー蓄積デバイス40に蓄積するステップを含むことができる。方法60は、たとえば65に示すように、水面下エネルギー蓄積デバイス40から水面下微小電気機械デバイス42に電気を供給するステップを含むことができる。
【0042】
図7に示されるように、ライザ列のための構造ヘルスモニタリングシステム25の実施形態は、デジタル信号アナライザ70を含むことができる。デジタル信号アナライザ70は、水面22にまたは水面22上に、典型的には水上船舶、掘削装置、またはプラットフォーム21上に配置することができ、あるいは(図1に示されるように)陸上の場所24に配置することができる。デジタル信号アナライザ70は、たとえば、電気信号を分析するように配置されたプロセッサ73を含むことができる。デジタル信号アナライザ70は、たとえば、複数のライザパイプ区間用のセンサの電極に発生した電気に応答した電気信号を受け取るための入力/出力デバイス72を含むことができる。デジタル信号アナライザ70は、たとえばディスプレイ71を含むことができる。デジタル信号アナライザ70は、たとえば、コンピュータプログラム製品75がその中に記憶された、メモリ74を含むことができる。コンピュータプログラム製品75は、有形で永続的なコンピュータメモリ媒体74上に記憶され、プロセッサ73上で動作可能であり、プロセッサ73によって実行されたときに、様々な動作を実行することによって海洋ライザパイプ列のためのヘルスモニタリングをデジタル信号アナライザ70に行わせる1組の命令を含む。動作は、76に示すように、複数のライザパイプ区間31用のセンサの電極に発生した電気に応答した電気信号を、入力/出力デバイス72によって受け取ることを含むことができる。動作は、77に示すように、海洋ライザパイプ列30のためのヘルスモニタリングを行うために、プロセッサ73によって電気信号を分析することを含むことができる。当業者には理解されるように、このような分析は一般に、曲げおよび張力を受けたライザ列30からの圧電効果をモデル化するために、マルチ物理モデリングおよびシミュレーション技術を含むことができる。マルチ物理モデリングは、機械的、電気的、および磁気的などの異なる場との相互作用が存在するシミュレーションを含む。圧電気の分析では、構造的な応力対電荷、および歪み対電荷の材料特性を用いて構造的な場と電界とが結合され、これは直接結合と呼ばれる。別法として順次結合は、たとえば構造解析の出力が電気的解析への入力となる。
【0043】
さらに図1に示されるように、デジタル信号アナライザ70はまた、内部または外部メモリに記憶された1つまたは複数のデータベース78を含むことができ、またはそれらにアクセスすることができる。
【0044】
当業者なら、様々なタイプのメモリが、本明細書で述べられるようなコンピュータ、たとえばデジタル信号アナライザ、または本発明の実施形態を有する他のコンピュータなどによって読み取り可能であることが理解されよう。コンピュータ可読媒体の例は、非限定的に、不揮発性、リードオンリメモリ(ROM)などのハードコードタイプの媒体、CD−ROM、およびDVD−ROM、または消去可能、電気的プログラマブルリードオンリメモリ(EEPROM)、フロッピー(商標)ディスク、ハードディスクドライブ、CD−R/RW、DVD−RAM、DVD−R/RW、DVD+R/RW、フラッシュドライブ、メモリスティックなどの記録可能型媒体、および他の新しいタイプのメモリ、ならびにデジタルおよびアナログ通信リンクなどの伝送型媒体を含む。このような媒体は、たとえば動作命令、ならびに上述のシステムおよび方法のステップに関係する命令を含むことができ、コンピュータ上で動作することができる。当業者にはこのような媒体は、たとえばソフトウェアを含むプログラム製品をその中に記憶するために、述べられた場所の代わりにまたはそれに加えて他の場所に配置することができることが理解されよう。当業者には理解されるようにこれらのコンピュータまたはサーバのそれぞれは、たとえばこれらの様々なタイプのメモリの1つまたは複数を有することができる。
【0045】
さらに当業者なら、本明細書で述べた実施形態を実施するのに、C++、VisualBasic、Fortran、Java(商標)、HTML、および他のプログラミング言語を含む様々なタイプのソフトウェア言語および開発環境を使用できることが理解されよう。
【0046】
図面および明細書において本発明の典型的な好ましい実施形態が開示され、特定の用語が用いられたが説明の意味のみで用いられたものであり、限定するために用いられたものではない。本発明について、これらの例示の実施形態を具体的に参照してかなり詳細に述べてきた。しかし、上記の明細書に述べた本発明の趣旨および範囲内において様々な変更形態および変形形態が可能であることが明らかであろう。
【符号の説明】
【0047】
21 プラットフォーム
22 水面
23 水面下
24 陸上の場所
25 構造ヘルスモニタリングシステム
26 海底
27 衛星
28 送信器/受信器
30 海洋ライザパイプ列
31 海洋ライザパイプ区間
32 機械的コネクタ
34 海中機器
35 ポリフッ化ビニリデン積層体
36 電極
37 カーボンエポキシ基材
38 センサ
40 水面下エネルギー蓄積デバイス
42 水面下微小電気機械デバイス
45 伝送線路
60 方法
70 デジタル信号プロセッサ、デジタル信号アナライザ
71 ディスプレイ
72 入力/出力デバイス
73 プロセッサ
74 メモリ
75 コンピュータプログラム製品
78 データベース
79 データ収集システム
【特許請求の範囲】
【請求項1】
軸(A)を有する円筒形状を備え、カーボンエポキシ基材(37)をさらに備える海洋ライザパイプ区間(31)と、
前記海洋ライザパイプ区間(31)に関連付けられ、前記海洋ライザパイプ区間(31)を実質的に外接して囲むセンサ(38)であって、ポリフッ化ビニリデン積層体(35)および電極(36)を備え、前記海洋ライザパイプ区間(31)の機械的応力および歪みに応答して、センサ(38)の前記電極(36)に電気を発生するように構成された、センサ(38)と
を備えることを特徴とする装置。
【請求項2】
前記センサ(38)が、前記海洋ライザパイプ(31)の前記カーボンエポキシ基材(35)の層の間に埋め込まれる、請求項1記載の装置。
【請求項3】
前記センサ(38)が、前記海洋ライザパイプ区間(31)の長さ(L2)の75%より大きな長さ(L3)に対して前記海洋ライザパイプ区間(31)の前記軸(A)に沿って延在する、請求項1記載の装置。
【請求項4】
前記センサ(38)は第1のセンサであり、前記装置は1つまたは複数の第2のセンサ(38)をさらに備え、前記第1のセンサ、および1つまたは複数の第2のセンサ(38)は、前記海洋ライザパイプ区間(31)の前記軸に沿ってほぼ均等の間隔で配置される、請求項1記載の装置。
【請求項5】
前記ポリフッ化ビニリデン積層体(35)の厚さは、約50ミクロンから約250ミクロンの間であり、前記海洋ライザパイプ区間(31)は、一体化したコネクタ(32)をさらに備えることを特徴とする、請求項1記載の装置。
【請求項6】
ライザ列(30)のための構造ヘルスモニタリングシステム(25)であって、
複数のライザパイプ区間(31)を備える海洋ライザパイプ列(30)であり、前記複数のライザパイプ区間(31)のそれぞれが、
軸(A)を有する円筒形状と、
カーボンエポキシ基材(35)と、
センサ(38)であって、電極(36)と、前記ライザパイプ区間(31)を実質的に外接して囲むポリフッ化ビニリデン積層体(35)とを備え、前記ライザパイプ区間(31)の機械的応力および歪みに応答して前記電極(36)に電気を発生するように構成された、センサ(38)と
を備える海洋ライザパイプ列(30)と、
前記複数のライザパイプ区間(31)用のセンサ(38)の電極(36)に発生した電気に応答した電気信号を分析し、前記海洋ライザパイプ列(30)のためのヘルスモニタリングを行うためのデジタル信号アナライザ(70)と
を備えることを特徴とするシステム(25)。
【請求項7】
前記海洋ライザパイプ列(30)のためのヘルスモニタリングが損傷検出を含み、損傷検出が衝撃損傷および疲労亀裂発生を含み、前記ポリフッ化ビニリデン積層体(35)の厚さが約50ミクロンから約250ミクロンの間であり、前記電極(36)が導電性銀インク被覆を含み、前記海洋ライザパイプ列(30)の全長(L1)が1000フィートより大きい、請求項6記載の構造ヘルスモニタリングシステム(25)。
【請求項8】
データ収集システム(79)をさらに備え、前記デジタル信号アナライザ(70)が水面(22)に配置されることを特徴とする、請求項6記載の構造ヘルスモニタリングシステム(25)。
【請求項9】
発生した電気からのエネルギーを蓄積するための水面下(23)エネルギー蓄積デバイス(40)と、
前記水面下(23)エネルギー蓄積デバイス(40)に結合された複数の水面下(23)微小電気機械デバイス(42)と
をさらに備えることを特徴とする、請求項6記載の構造ヘルスモニタリングシステム(25)。
【請求項10】
前記デジタル信号アナライザ(70)が、
電気信号を分析するように配置されたプロセッサ(73)と、
前記複数のライザパイプ区間(31)用のセンサ(38)の電極(36)に発生した電気に応答した電気信号を受け取るための入力/出力デバイス(72)と、
コンピュータプログラム製品(75)がその中に記憶されたメモリ(74)であって、有形で永続的なコンピュータメモリ媒体(74)上に記憶され、プロセッサ(73)上で動作可能であり、前記コンピュータプログラム製品が、前記プロセッサ(73)によって実行されたときに、
前記複数のライザパイプ区間(31)用のセンサ(38)の電極(36)に発生した電気に応答した電気信号を、前記入力/出力デバイス(72)によって受け取る(76)動作と、
損傷検出を含む、前記海洋ライザパイプ列(30)のためのヘルスモニタリングを行うために、前記プロセッサ(73)によって前記電気信号を分析する(77)動作と
を行うことによって、前記海洋ライザパイプ列(30)のためのヘルスモニタリングを、前記デジタル信号アナライザ(70)に行わせる1組の命令(75)を備える、メモリ(74)と
をさらに備えることを特徴とする、請求項6記載の構造ヘルスモニタリングシステム(25)。
【請求項11】
複合ライザ(31)内の亀裂を検出する方法(60)であって、
複数のライザパイプ区間(31)を使用して海洋ライザパイプ列(30)を組み立てるステップ(61)であり、前記複数のライザパイプ区間(31)のそれぞれが軸(A)を有する円筒形状を備え、前記複数のライザパイプ区間の少なくとも1つのライザパイプ区間(31)がカーボンエポキシ基材(37)を備える、ステップと、
前記少なくとも1つのライザパイプ区間(31)に少なくとも1つのセンサ(38)を設けるステップ(62)であり、前記少なくとも1つのセンサ(38)が前記少なくとも1つのライザパイプ区間(31)を実質的に外接して囲み、前記少なくとも1つのセンサ(38)がポリフッ化ビニリデン積層体(35)および電極(36)を備える、ステップと、
前記少なくとも1つのライザパイプ区間(31)の機械的応力および歪みに応答して、前記少なくとも1つのセンサ(38)の電極(36)に電気を発生するステップ(63)と、
前記少なくとも1つのセンサ(38)の電極(36)に発生した電気に応答した電気信号を分析するステップ(67)であり、それによって前記少なくとも1つのライザパイプ区間(31)内の亀裂を検出する、ステップと
を含むことを特徴とする方法。
【請求項12】
前記ポリフッ化ビニリデン積層体(35)の厚さが約50ミクロンから約250ミクロンの間である、請求項11記載の方法(60)。
【請求項13】
前記少なくとも1つのセンサ(38)が、前記ライザパイプ区間(31)のカーボンエポキシ基材(37)の層の間に埋め込まれ、前記少なくとも1つのセンサ(38)が前記ライザパイプ区間(31)の長さ(L2)の75%より大きな長さ(L3)に対して前記ライザパイプ区間(31)の軸(A)に沿って延在し、前記電極(36)が導電性銀インク被覆を含み、前記組み立てられた海洋ライザパイプ列(30)の全長(L1)が1000フィートより大きく、前記海洋ライザパイプ区間(31)の機械的応力および歪みが振動による応力および歪みを含む、請求項11記載の方法(60)。
【請求項14】
電気信号を分析する前記ステップ(67)が、データ収集システム(79)およびデジタル信号アナライザ(70)を含む、請求項11記載の方法(60)。
【請求項15】
前記発生した電気からのエネルギーを、水面下(23)エネルギー蓄積デバイス(40)に蓄積するステップ(64)と、
前記水面下(23)エネルギー蓄積デバイス(40)から水面下(23)微小電気機械デバイス(42)に電気を供給するステップ(65)と
をさらに含むことを特徴とする、請求項11記載の方法(60)。
【請求項1】
軸(A)を有する円筒形状を備え、カーボンエポキシ基材(37)をさらに備える海洋ライザパイプ区間(31)と、
前記海洋ライザパイプ区間(31)に関連付けられ、前記海洋ライザパイプ区間(31)を実質的に外接して囲むセンサ(38)であって、ポリフッ化ビニリデン積層体(35)および電極(36)を備え、前記海洋ライザパイプ区間(31)の機械的応力および歪みに応答して、センサ(38)の前記電極(36)に電気を発生するように構成された、センサ(38)と
を備えることを特徴とする装置。
【請求項2】
前記センサ(38)が、前記海洋ライザパイプ(31)の前記カーボンエポキシ基材(35)の層の間に埋め込まれる、請求項1記載の装置。
【請求項3】
前記センサ(38)が、前記海洋ライザパイプ区間(31)の長さ(L2)の75%より大きな長さ(L3)に対して前記海洋ライザパイプ区間(31)の前記軸(A)に沿って延在する、請求項1記載の装置。
【請求項4】
前記センサ(38)は第1のセンサであり、前記装置は1つまたは複数の第2のセンサ(38)をさらに備え、前記第1のセンサ、および1つまたは複数の第2のセンサ(38)は、前記海洋ライザパイプ区間(31)の前記軸に沿ってほぼ均等の間隔で配置される、請求項1記載の装置。
【請求項5】
前記ポリフッ化ビニリデン積層体(35)の厚さは、約50ミクロンから約250ミクロンの間であり、前記海洋ライザパイプ区間(31)は、一体化したコネクタ(32)をさらに備えることを特徴とする、請求項1記載の装置。
【請求項6】
ライザ列(30)のための構造ヘルスモニタリングシステム(25)であって、
複数のライザパイプ区間(31)を備える海洋ライザパイプ列(30)であり、前記複数のライザパイプ区間(31)のそれぞれが、
軸(A)を有する円筒形状と、
カーボンエポキシ基材(35)と、
センサ(38)であって、電極(36)と、前記ライザパイプ区間(31)を実質的に外接して囲むポリフッ化ビニリデン積層体(35)とを備え、前記ライザパイプ区間(31)の機械的応力および歪みに応答して前記電極(36)に電気を発生するように構成された、センサ(38)と
を備える海洋ライザパイプ列(30)と、
前記複数のライザパイプ区間(31)用のセンサ(38)の電極(36)に発生した電気に応答した電気信号を分析し、前記海洋ライザパイプ列(30)のためのヘルスモニタリングを行うためのデジタル信号アナライザ(70)と
を備えることを特徴とするシステム(25)。
【請求項7】
前記海洋ライザパイプ列(30)のためのヘルスモニタリングが損傷検出を含み、損傷検出が衝撃損傷および疲労亀裂発生を含み、前記ポリフッ化ビニリデン積層体(35)の厚さが約50ミクロンから約250ミクロンの間であり、前記電極(36)が導電性銀インク被覆を含み、前記海洋ライザパイプ列(30)の全長(L1)が1000フィートより大きい、請求項6記載の構造ヘルスモニタリングシステム(25)。
【請求項8】
データ収集システム(79)をさらに備え、前記デジタル信号アナライザ(70)が水面(22)に配置されることを特徴とする、請求項6記載の構造ヘルスモニタリングシステム(25)。
【請求項9】
発生した電気からのエネルギーを蓄積するための水面下(23)エネルギー蓄積デバイス(40)と、
前記水面下(23)エネルギー蓄積デバイス(40)に結合された複数の水面下(23)微小電気機械デバイス(42)と
をさらに備えることを特徴とする、請求項6記載の構造ヘルスモニタリングシステム(25)。
【請求項10】
前記デジタル信号アナライザ(70)が、
電気信号を分析するように配置されたプロセッサ(73)と、
前記複数のライザパイプ区間(31)用のセンサ(38)の電極(36)に発生した電気に応答した電気信号を受け取るための入力/出力デバイス(72)と、
コンピュータプログラム製品(75)がその中に記憶されたメモリ(74)であって、有形で永続的なコンピュータメモリ媒体(74)上に記憶され、プロセッサ(73)上で動作可能であり、前記コンピュータプログラム製品が、前記プロセッサ(73)によって実行されたときに、
前記複数のライザパイプ区間(31)用のセンサ(38)の電極(36)に発生した電気に応答した電気信号を、前記入力/出力デバイス(72)によって受け取る(76)動作と、
損傷検出を含む、前記海洋ライザパイプ列(30)のためのヘルスモニタリングを行うために、前記プロセッサ(73)によって前記電気信号を分析する(77)動作と
を行うことによって、前記海洋ライザパイプ列(30)のためのヘルスモニタリングを、前記デジタル信号アナライザ(70)に行わせる1組の命令(75)を備える、メモリ(74)と
をさらに備えることを特徴とする、請求項6記載の構造ヘルスモニタリングシステム(25)。
【請求項11】
複合ライザ(31)内の亀裂を検出する方法(60)であって、
複数のライザパイプ区間(31)を使用して海洋ライザパイプ列(30)を組み立てるステップ(61)であり、前記複数のライザパイプ区間(31)のそれぞれが軸(A)を有する円筒形状を備え、前記複数のライザパイプ区間の少なくとも1つのライザパイプ区間(31)がカーボンエポキシ基材(37)を備える、ステップと、
前記少なくとも1つのライザパイプ区間(31)に少なくとも1つのセンサ(38)を設けるステップ(62)であり、前記少なくとも1つのセンサ(38)が前記少なくとも1つのライザパイプ区間(31)を実質的に外接して囲み、前記少なくとも1つのセンサ(38)がポリフッ化ビニリデン積層体(35)および電極(36)を備える、ステップと、
前記少なくとも1つのライザパイプ区間(31)の機械的応力および歪みに応答して、前記少なくとも1つのセンサ(38)の電極(36)に電気を発生するステップ(63)と、
前記少なくとも1つのセンサ(38)の電極(36)に発生した電気に応答した電気信号を分析するステップ(67)であり、それによって前記少なくとも1つのライザパイプ区間(31)内の亀裂を検出する、ステップと
を含むことを特徴とする方法。
【請求項12】
前記ポリフッ化ビニリデン積層体(35)の厚さが約50ミクロンから約250ミクロンの間である、請求項11記載の方法(60)。
【請求項13】
前記少なくとも1つのセンサ(38)が、前記ライザパイプ区間(31)のカーボンエポキシ基材(37)の層の間に埋め込まれ、前記少なくとも1つのセンサ(38)が前記ライザパイプ区間(31)の長さ(L2)の75%より大きな長さ(L3)に対して前記ライザパイプ区間(31)の軸(A)に沿って延在し、前記電極(36)が導電性銀インク被覆を含み、前記組み立てられた海洋ライザパイプ列(30)の全長(L1)が1000フィートより大きく、前記海洋ライザパイプ区間(31)の機械的応力および歪みが振動による応力および歪みを含む、請求項11記載の方法(60)。
【請求項14】
電気信号を分析する前記ステップ(67)が、データ収集システム(79)およびデジタル信号アナライザ(70)を含む、請求項11記載の方法(60)。
【請求項15】
前記発生した電気からのエネルギーを、水面下(23)エネルギー蓄積デバイス(40)に蓄積するステップ(64)と、
前記水面下(23)エネルギー蓄積デバイス(40)から水面下(23)微小電気機械デバイス(42)に電気を供給するステップ(65)と
をさらに含むことを特徴とする、請求項11記載の方法(60)。
【図1】


【図2】
【図3】
【図4A】
【図4B】
【図4C】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4A】
【図4B】
【図4C】
【図5】
【図6】
【図7】
【公開番号】特開2012−47736(P2012−47736A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−169169(P2011−169169)
【出願日】平成23年8月2日(2011.8.2)
【出願人】(511188370)ベトコ・グレイ・インコーポレイテッド (1)
【氏名又は名称原語表記】VETCO GRAY INC.
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2011−169169(P2011−169169)
【出願日】平成23年8月2日(2011.8.2)
【出願人】(511188370)ベトコ・グレイ・インコーポレイテッド (1)
【氏名又は名称原語表記】VETCO GRAY INC.
【Fターム(参考)】
[ Back to top ]