
地上走行誘導支援システム
【課題】着陸後の航空機と誘導路走行中の航空機との衝突を回避する灯火制御を実施する。
【解決手段】誘導路12と滑走路11の間に少なくとも高速離脱誘導路13が設けられ、誘導路上を走行する航空機17を滑走路側に誘導し、かつ、滑走路に着陸した航空機16を誘導路側に誘導する地上走行誘導支援システムであって、高速離脱誘導路13の滑走路境界部分に横断するように設置された停止線灯23と、高速離脱誘導路13の手前側となる誘導路12上に前記第1の航空機17が存在し、かつ、着陸した第2の航空機16が高速離脱誘導路13の手前側となる滑走路上を高速走行しているとき、停止線灯23を点灯して第2の航空機16の高速離脱誘導路13への進入を禁止する監視制御装置31とを備えた構成である。
【解決手段】誘導路12と滑走路11の間に少なくとも高速離脱誘導路13が設けられ、誘導路上を走行する航空機17を滑走路側に誘導し、かつ、滑走路に着陸した航空機16を誘導路側に誘導する地上走行誘導支援システムであって、高速離脱誘導路13の滑走路境界部分に横断するように設置された停止線灯23と、高速離脱誘導路13の手前側となる誘導路12上に前記第1の航空機17が存在し、かつ、着陸した第2の航空機16が高速離脱誘導路13の手前側となる滑走路上を高速走行しているとき、停止線灯23を点灯して第2の航空機16の高速離脱誘導路13への進入を禁止する監視制御装置31とを備えた構成である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、誘導路走行中の航空機及び滑走路に着陸後の航空機の安全な地上走行を支援する地上走行誘導支援システムに関する。
【背景技術】
【0002】
地上走行誘導支援システムは、航空機の安全、かつ、円滑な地上走行を目的とした視覚援助設備の一部であって、滑走路に連なる誘導路の所要箇所に誘導路灯、誘導路中心線灯、停止線灯及び誘導案内灯などが設置され、滑走路及び誘導路に存在する航空機ごとに、予め設定された走行経路に従い、前記各灯火の点灯・消灯等に関する自動監視制御を実施し、航空機の安全及び円滑な地上走行を実現している。
【0003】
従来の地上走行誘導支援システムとしては、飛行場の滑走路及び誘導路に存在する航空機の現在位置を検知する監視レーダ,航空機検知センサ等の位置検出手段と、この位置検出手段で検出された航空機の現在位置とその目的地とに基づき、現在位置から目的地までの走行経路を設定する走行経路設定手段とを備え、この設定された走行経路に従い、前記位置検出手段で検出された航空機の現在位置と管制官による飛行場の目視とにより、該当する航空機に対して、各灯火による進行方向や停止指示などの誘導指示を与えている(特許文献1)。
【0004】
ところで、以上のような地上走行誘導支援システムでは、飛行場の運用に携わる操作員(管制官を含む)が航空機に誘導指示を与えているため、大規模な飛行場における低視程時(夜間、降雨、濃霧等の視界不良時)の運用に問題が出てくる。
【0005】
低視程時の運用は、飛行場内に存在する航空機の現在位置情報と目視確認とに基づき、管制官が灯火制御を介して地上走行する航空機に必要な誘導指示を与えているが、実際的には設定された走行経路に従って走行中の航空機を含む周辺の状況を監視し、指示内容の判断・決定、指示(伝達)等を行うことから、管制官の負担が大きく、航空機の地上走行が円滑に行われ難い状況にある。
【0006】
それ故、指示の不備によっては、航空機のニアミス事故、衝突事故の発生原因にもなりかねず、飛行場の運用に携わる管制官を含む操作員の業務は精神的にも非常に激しいものとなっている。
【0007】
通常、飛行場の灯火監視制御は、主に着陸してくる航空機のための滑走路側のものと、エプロン(ターミナル)から滑走路に向けて走行する航空機及び滑走路に着陸した後にエプロンに向けて走行する航空機のための誘導路側のものとに分けられ、その灯火の数も飛行場によって様々であるが、数百から数万にも及ぶ。その結果、管制官による監視・指示内容の判断・決定・操作(指示)等の作業にもおのずと限界がある。
【0008】
管制官による飛行場の灯火監視制御は、「1」航空機着陸時の滑走路の運用方向、「2」昼間・夕暮れ・夜間などの背景輝度、「3」雲の高さが例えば1000m以上、以下の雲底高、「4」前述した視程よりなる4条件を判断し、各条件毎に操作スイッチによって1つを選択操作し、現在の周囲環境にあった最適な明るさとなるように誘導路中心線灯の灯火状態を制御する。
【0009】
例えば、背景輝度が「昼間」、「視程の悪い状態」、「雲底高が低い状態」のときには誘導路中心線灯の灯火を明るくする制御を行い、逆に背景輝度が「夜間」、「視程が良い状態」、「雲底高が高い状態」のときには誘導路中心線灯の灯火を暗くする制御を行う。従って、パイロットは、灯火の状態を見ながら、航空機を航行または走行させている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2001−250200号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、特許文献1に記載される地上走行誘導支援システムでは、管制官が低視程時の運用時に航空機に対して灯火制御等を通して必要な誘導指示を与えているが、管制官が走行する航空機の周辺状況の目視、指示内容の判断・決定、灯火制御(操作)指示等を随時行う必要があり、飛行場の運用に携わる管制官を含む操作員の精神的な負担が非常に大きい問題がある。
【0012】
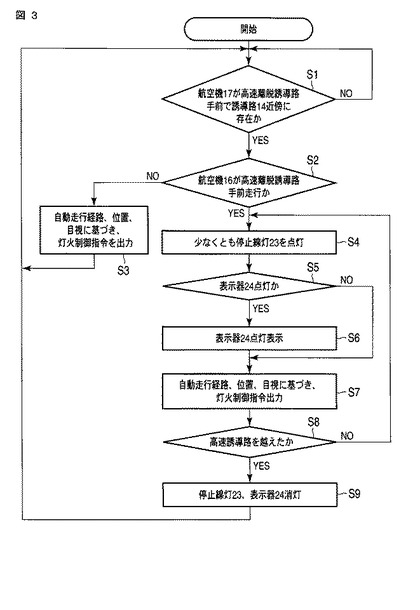
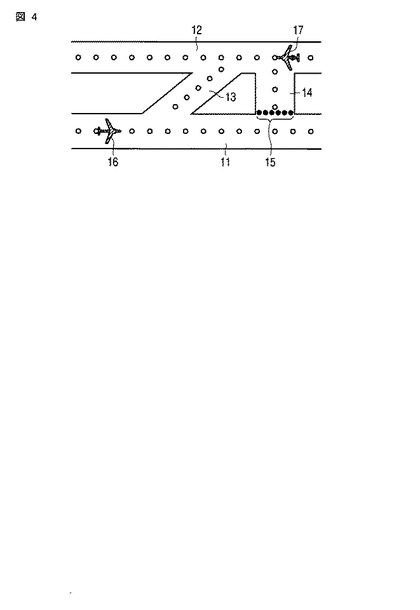
また、滑走路を走行する航空機に対して、監視レーダ,航空機検知センサ等から得られる現在位置情報と目視とに基づいて誘導指示を与えているが、例えば図4に示すように、滑走路11と誘導路12との間に高速離脱誘導路13や連絡誘導路14を設けている飛行場では、連絡誘導路4の滑走路11境界部分に横断するように停止線灯15,…を配列し、滑走路11に着陸した航空機16が滑走路11上に存在するとき、停止線灯15,…を点灯し、誘導路12上の航空機17が連絡誘導路14を通って滑走路11に進入しないように灯火制御している。
【0013】
しかしながら、着陸後の航空機16が滑走路11に連なる高速離脱誘導路13付近に高速で進入してくるので、パイロットが管制官からの誘導指示を待って次の進行方向や停止に入ろうとする場合や前述したように管制官による低視程時の運用制御の場合、非常に危険な状態となる。すなわち、高速離脱誘導路13の手前側の誘導路12上に航空機17が存在する場合、着陸後の航空機16が高速離脱誘導路13に高速で進入してくると、高速離脱誘導路13の手前側の誘導路12上に航空機17が存在するとき、衝突する危険性が極めて高くなる。
【0014】
本発明は上記事情に鑑みてなされたもので、滑走路に着陸後の航空機と誘導路走行中の航空機との衝突を回避する灯火制御を実施し、航空機からの視覚援助機能を生かし、地上管制を司る管制官の業務の軽減化及び地上走行の更なる安全性を確保する地上走行誘導支援システムを提供することを目的とする。
【課題を解決するための手段】
【0015】
上記課題を解決するために、本発明は、誘導路と滑走路の間に少なくとも高速離脱誘導路が設けられ、前記誘導路に設置された誘導路中心線灯を監視し灯火制御しながら当該誘導路上の第1の航空機を前記滑走路側に誘導し、かつ、当該滑走路に設置された滑走路中心線灯を監視し灯火制御しながら当該滑走路に着陸した第2の航空機を前記誘導路側に誘導する地上走行誘導支援システムであって、前記高速離脱誘導路の前記滑走路境界部分に横断するように設置された停止線灯と、前記高速離脱誘導路の手前側となる前記誘導路上に第1の航空機が存在し、かつ、前記着陸した前記第2の航空機が前記高速離脱誘導路の手前側となる前記滑走路上を高速走行しているとき、前記停止線灯を点灯して前記第2の航空機の前記高速離脱誘導路への進入を禁止する監視制御手段とを備えた構成である。
【0016】
また、本発明は、上記構成に新たに、高速離脱誘導路の手前側に位置する滑走路の側方に、着陸した第2の航空機の走行路を表す走行路マークと当該走行路マークのうち進入不可とする走行路マーク側に配置した進入不可マーク表示部とを有する進入不可表示器を設け、前記監視制御手段が停止線灯を点灯する際に進入不可表示器の進入不可マーク表示部を点灯表示し、進入不可とすることにより、滑走路に着陸後の航空機と誘導路走行中の航空機との衝突を回避する灯火制御を実施する構成である。
【発明の効果】
【0017】
本発明によれば、滑走路に着陸後の航空機と誘導路走行中の航空機との衝突を自動的に回避するための灯火制御を実施でき、航空機からの視覚航行援助機能を発揮でき、ひいては地上走行の更なる安全性及び地上管制を司る管制官の業務の軽減化を図る地上走行誘導支援システムを提供できる。
【図面の簡単な説明】
【0018】
【図1】本発明に係る地上走行誘導支援システムの一実施の形態を示す構成図。
【図2】高速離脱誘導路手前の滑走路側方に設置される進入不可表示器の表示態様例を示す図。
【図3】本発明に係る地上走行誘導支援システムの処理動作の流れを説明するフロー図。
【図4】滑走路と誘導路との間に高速離脱誘導路等を設けた飛行場の平面図。
【発明を実施するための形態】
【0019】
以下、本発明の実施の形態について図面を参照して説明する。
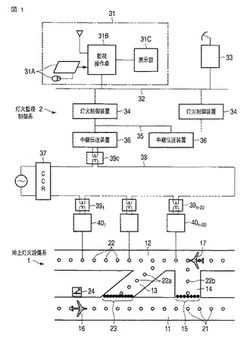
図1は本発明に係る地上走行誘導支援システムの一実施の形態を示す構成図である。
【0020】
地上走行誘導支援システムは、大きく分けて、地上灯火設備系1と灯火監視制御系2とで構成される。
【0021】
地上灯火設備系1は、図4と同様に滑走路11と誘導路12との間に高速離脱誘導路13や連絡誘導路14が設けられ、滑走路11にはその滑走路中心線に沿って滑走路中心線灯21,…が設置され、また誘導路22には誘導路中心線に沿って誘導路中心線灯22,…が設置されている。
【0022】
高速離脱誘導路13は、滑走路11に着陸した航空機16が滑走路11から離脱して誘導路12に進入していくための誘導路であって、中心線に沿って誘導路中心線灯22a,…が設置され、さらに滑走路11との境界部分に停止線灯23,…が設置されている。
【0023】
また、滑走路11及び誘導路12には、予め定める区間ごとに航空機検知センサ(図示せず)が設置され、隣接する各区間の境界を通過する際に航空機16,17の現在位置情報を取得し、無線通信または有線通信により後記する監視制御装置31に送信する構成である。
【0024】
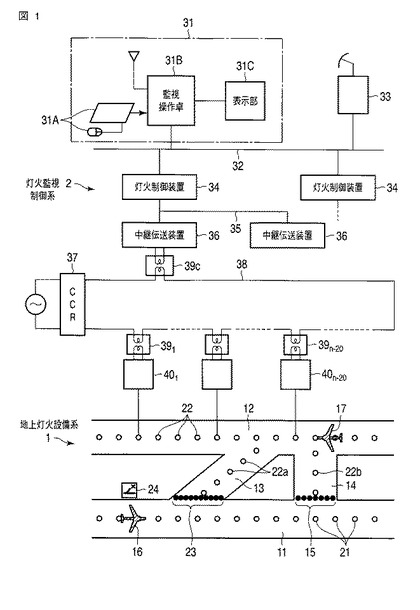
さらに、高速離脱誘導路13の手前側の滑走路11側方に、着陸後の航空機16の高速離脱誘導路13への進入を不可とする進入不可表示器24が設けられている。なお、進入不可表示器24は、着陸した航空機16の走行路を表す走行路マーク24aと、進入不可とする走行路マーク24a側に例えば赤色により×印マークにて点灯表示する進入不可マーク表示部24bとからなり、例えば図2(a)〜(d)に示すように幾つかの表示形態のものがある。
【0025】
灯火監視制御系2としては、灯火に関する誘導指示を行う監視制御装置31が伝送LAN32を介して空港地表レーダ33及び少なくとも1台の灯火制御装置34と接続されている。各灯火制御装置34には、制御LAN35を介して少なくとも1台の中継伝送装置36が接続されている。
【0026】
中継伝送装置36は、定電流制御電源(CCR)37の出力側に環状に接続されてなる電力線38にゴムトランス39cを介して接続され、監視制御装置31から灯火制御装置34を介して受ける灯火制御指令をゴムトランス39cを経由して電力線38に重畳して搬送する。
【0027】
環状化されている電力線38にはそれぞれゴムトランス391,392,…,39n-20,…を介して末端制御装置401,…,40n-20,…が接続され、地上灯火設備系1を構成する誘導路中心線灯22等の点灯・消灯制御を実施するとともに、現在の灯火の状態を対応するゴムトランス391,…,39n-20,…、中継伝送装置36、灯火制御装置34を経由させて監視制御装置31に送信する。
【0028】
監視制御装置31は、管制官が航空機の安全走行に関する操作指示を入力するためのキーボード,マウス,操作スイッチ等の入力部31Aと、運行計画情報に基づいて各航空機の走行経路を決定し、かつ、飛行場に設置される空港地表レーダ33によって捕捉される航空機の画像データの大まかな位置と、前述した航空機検知センサからの各航空機の現在位置情報とに基づき、灯火制御指令を出力する監視操作卓31Bと、飛行場全体のシミュレーションモデルの中に現在位置情報に基づく各航空機を表示する表示部31Cとが設けられている。
【0029】
次に、以上のように構成された地上走行誘導支援システムの動作について説明する。
【0030】
従来、予め各航空機の便名に関する運行計画情報に基づき、エプロンから当該便名の航空機17の離陸場所に至るまでの走行経路が自動的に設定される。
【0031】
よって、監視制御装置31は、自動走行経路に従い、空港地表レーダ33や航空機検知センサからの航空機17の現在位置情報、末端制御装置401,…,40n-20,…,40nから上がってくる誘導路中心線灯22,…の灯火情報及び管制官による目視等に基づき、監視操作卓31Bから灯火制御指令を出力する。
【0032】
因みに、着陸した航空機16が高速離脱誘導路13の手前側の滑走路11を高速走行している際、誘導路12上に存在する航空機17が連絡誘導路14から滑走路11に入らないように停止線灯15を点灯するか、あるいは停止線灯15の点灯のもとに、着陸した航空機16が高速離脱誘導路13に進入させないようにしている。
【0033】
しかし、管制官が十分に目視確認し難い低視程時、着陸直後の航空機16が滑走路11上を高速走行しており、管制官による誘導指示の遅れや指示誤りが発生すると、高速離脱誘導路13に進入し、航空機17と衝突する危険性がある。
【0034】
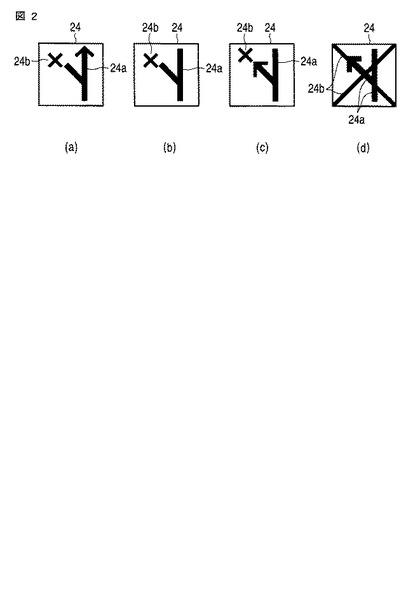
そこで、監視制御装置31は図3に示すような処理の流れに従って動作する。
監視制御装置31は、誘導路12に設置された航空機検知センサなどから航空機位置情報を取得し、表示部31Cに表示される誘導路21の該当位置に航空機17が表示される。監視制御装置31は、航空機17が高速離脱誘導路13の手前で連絡誘導路14近傍に存在するか否かを判断する(S1)。
【0035】
ここで、航空機17が存在すると判断したとき、滑走路11に沿って設置される航空機検知センサの航空機位置情報や空港地表レーダ33による航空機の位置情報に基づき、着陸した航空機16が高速離脱誘導路13の手前を走行しているか否かを判断する(S2)。表示部31Cに表示される滑走路11上の航空機16が高速離脱誘導路13の手前を走行していないと判断したときには、管制官が自動走行経路、航空機の位置及び目視に基づき灯火制御指令を出力し(S3)、航空機17に関する誘導指示を与えつつステップS1に戻り,同様の処理を繰り返す。
【0036】
ところで、ステップS1にて航空機17が高速離脱誘導路13の手前で連絡誘導路14近傍に存在し、かつ、ステップS2にて航空機16が高速離脱誘導路13の手前を走行していると判断すると、少なくとも高速離脱誘導路13側の停止線灯23を赤色点灯し(S4)、航空機16が高速離脱誘導路13に進入しないように制御する。
【0037】
さらに、引き続き、監視制御装置31は、進入不可表示器24を表示するか否かを判断する(S5)。表示するフラグが立っている場合には進入不可表示器24の進入不可マーク表示部24bである例えば×印マークを赤色点灯した後(S6)、前述したステップS3と同様に航空機17に誘導指示を出す一方、航空機16の高速走行を追尾し、必要に応じて連絡誘導路14側の停止線灯15を点灯する。
【0038】
そして、航空機16が高速離脱誘導路13を通過したことを確認すると(S8)、停止線灯23及び進入不可表示器24を消灯する(S9)。なお、連絡誘導路14側の停止線灯15が点灯している場合には、航空機16が連絡誘導路14を通過したことを確認し、停止線灯15を消灯する。
【0039】
従って、以上のような実施の形態によれば、誘導路12を走行する航空機17が高速離脱誘導路13の手前で連絡誘導路14近傍に存在するとき、滑走路11に着陸した航空機16が高速走行で高速離脱誘導路13の手前に存在するとき、高速離脱誘導路13側の停止線灯23を点灯し、進入不可表示器24の進入不可マーク表示部24bを赤色点灯することにより、航空機16のパイロットは進入不可マーク表示部24bの赤色点灯及び停止線灯23の点灯により、高速離脱誘導路13に進入不可経路であると容易に認識でき、誘導路12を走行中の航空機17とのニアミス事故や衝突事故を確実に回避することができる。
【0040】
よって、航空機への正確な視覚航行援助機能を十分に発揮でき、ひいては飛行場運用の効率化、航空機同士の地上走行の安全を十分に確保することができ、地上管制を司る管制官の業務の軽減化にも大きく貢献できる。
【0041】
その他、本発明は、上記実施の形態に限定されるものでなく、その要旨を逸脱しない範囲で種々変形して実施できる。
【0042】
上記実施の形態では、管制官が十分に目視確認し難い低視程時であることを前提に図3に示す一連の処理動作を行うことを述べたが、滑走路11上の航空機16及び誘導路12上の航空機17が所定の位置関係にあるとき、低視程時の有無に拘らず、停止線灯23及び進入不可マーク表示部24bを点灯する構成であっても良い。
【符号の説明】
【0043】
1…地上灯火設備系、2…灯火監視制御系、11…滑走路、12…誘導路、13…高速離脱誘導路、14…連絡誘導路、15…停止線灯、16,17…航空機、21…滑走路中心線灯、22,22a,22b…誘導路中心線灯、23…停止線灯、24…進入不可表示器、31…監視制御装置、31A…入力部、31B…監視操作卓、31C…表示部、33…空港地表レーダ、34…灯火制御装置、36…中継伝送装置、37…定電流制御電源(CCR)、38…電力線、39c,391,…,39n-20,… …ゴムトランス、401,…,40n-20,… …末端制御装置。
【技術分野】
【0001】
本発明は、誘導路走行中の航空機及び滑走路に着陸後の航空機の安全な地上走行を支援する地上走行誘導支援システムに関する。
【背景技術】
【0002】
地上走行誘導支援システムは、航空機の安全、かつ、円滑な地上走行を目的とした視覚援助設備の一部であって、滑走路に連なる誘導路の所要箇所に誘導路灯、誘導路中心線灯、停止線灯及び誘導案内灯などが設置され、滑走路及び誘導路に存在する航空機ごとに、予め設定された走行経路に従い、前記各灯火の点灯・消灯等に関する自動監視制御を実施し、航空機の安全及び円滑な地上走行を実現している。
【0003】
従来の地上走行誘導支援システムとしては、飛行場の滑走路及び誘導路に存在する航空機の現在位置を検知する監視レーダ,航空機検知センサ等の位置検出手段と、この位置検出手段で検出された航空機の現在位置とその目的地とに基づき、現在位置から目的地までの走行経路を設定する走行経路設定手段とを備え、この設定された走行経路に従い、前記位置検出手段で検出された航空機の現在位置と管制官による飛行場の目視とにより、該当する航空機に対して、各灯火による進行方向や停止指示などの誘導指示を与えている(特許文献1)。
【0004】
ところで、以上のような地上走行誘導支援システムでは、飛行場の運用に携わる操作員(管制官を含む)が航空機に誘導指示を与えているため、大規模な飛行場における低視程時(夜間、降雨、濃霧等の視界不良時)の運用に問題が出てくる。
【0005】
低視程時の運用は、飛行場内に存在する航空機の現在位置情報と目視確認とに基づき、管制官が灯火制御を介して地上走行する航空機に必要な誘導指示を与えているが、実際的には設定された走行経路に従って走行中の航空機を含む周辺の状況を監視し、指示内容の判断・決定、指示(伝達)等を行うことから、管制官の負担が大きく、航空機の地上走行が円滑に行われ難い状況にある。
【0006】
それ故、指示の不備によっては、航空機のニアミス事故、衝突事故の発生原因にもなりかねず、飛行場の運用に携わる管制官を含む操作員の業務は精神的にも非常に激しいものとなっている。
【0007】
通常、飛行場の灯火監視制御は、主に着陸してくる航空機のための滑走路側のものと、エプロン(ターミナル)から滑走路に向けて走行する航空機及び滑走路に着陸した後にエプロンに向けて走行する航空機のための誘導路側のものとに分けられ、その灯火の数も飛行場によって様々であるが、数百から数万にも及ぶ。その結果、管制官による監視・指示内容の判断・決定・操作(指示)等の作業にもおのずと限界がある。
【0008】
管制官による飛行場の灯火監視制御は、「1」航空機着陸時の滑走路の運用方向、「2」昼間・夕暮れ・夜間などの背景輝度、「3」雲の高さが例えば1000m以上、以下の雲底高、「4」前述した視程よりなる4条件を判断し、各条件毎に操作スイッチによって1つを選択操作し、現在の周囲環境にあった最適な明るさとなるように誘導路中心線灯の灯火状態を制御する。
【0009】
例えば、背景輝度が「昼間」、「視程の悪い状態」、「雲底高が低い状態」のときには誘導路中心線灯の灯火を明るくする制御を行い、逆に背景輝度が「夜間」、「視程が良い状態」、「雲底高が高い状態」のときには誘導路中心線灯の灯火を暗くする制御を行う。従って、パイロットは、灯火の状態を見ながら、航空機を航行または走行させている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2001−250200号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、特許文献1に記載される地上走行誘導支援システムでは、管制官が低視程時の運用時に航空機に対して灯火制御等を通して必要な誘導指示を与えているが、管制官が走行する航空機の周辺状況の目視、指示内容の判断・決定、灯火制御(操作)指示等を随時行う必要があり、飛行場の運用に携わる管制官を含む操作員の精神的な負担が非常に大きい問題がある。
【0012】
また、滑走路を走行する航空機に対して、監視レーダ,航空機検知センサ等から得られる現在位置情報と目視とに基づいて誘導指示を与えているが、例えば図4に示すように、滑走路11と誘導路12との間に高速離脱誘導路13や連絡誘導路14を設けている飛行場では、連絡誘導路4の滑走路11境界部分に横断するように停止線灯15,…を配列し、滑走路11に着陸した航空機16が滑走路11上に存在するとき、停止線灯15,…を点灯し、誘導路12上の航空機17が連絡誘導路14を通って滑走路11に進入しないように灯火制御している。
【0013】
しかしながら、着陸後の航空機16が滑走路11に連なる高速離脱誘導路13付近に高速で進入してくるので、パイロットが管制官からの誘導指示を待って次の進行方向や停止に入ろうとする場合や前述したように管制官による低視程時の運用制御の場合、非常に危険な状態となる。すなわち、高速離脱誘導路13の手前側の誘導路12上に航空機17が存在する場合、着陸後の航空機16が高速離脱誘導路13に高速で進入してくると、高速離脱誘導路13の手前側の誘導路12上に航空機17が存在するとき、衝突する危険性が極めて高くなる。
【0014】
本発明は上記事情に鑑みてなされたもので、滑走路に着陸後の航空機と誘導路走行中の航空機との衝突を回避する灯火制御を実施し、航空機からの視覚援助機能を生かし、地上管制を司る管制官の業務の軽減化及び地上走行の更なる安全性を確保する地上走行誘導支援システムを提供することを目的とする。
【課題を解決するための手段】
【0015】
上記課題を解決するために、本発明は、誘導路と滑走路の間に少なくとも高速離脱誘導路が設けられ、前記誘導路に設置された誘導路中心線灯を監視し灯火制御しながら当該誘導路上の第1の航空機を前記滑走路側に誘導し、かつ、当該滑走路に設置された滑走路中心線灯を監視し灯火制御しながら当該滑走路に着陸した第2の航空機を前記誘導路側に誘導する地上走行誘導支援システムであって、前記高速離脱誘導路の前記滑走路境界部分に横断するように設置された停止線灯と、前記高速離脱誘導路の手前側となる前記誘導路上に第1の航空機が存在し、かつ、前記着陸した前記第2の航空機が前記高速離脱誘導路の手前側となる前記滑走路上を高速走行しているとき、前記停止線灯を点灯して前記第2の航空機の前記高速離脱誘導路への進入を禁止する監視制御手段とを備えた構成である。
【0016】
また、本発明は、上記構成に新たに、高速離脱誘導路の手前側に位置する滑走路の側方に、着陸した第2の航空機の走行路を表す走行路マークと当該走行路マークのうち進入不可とする走行路マーク側に配置した進入不可マーク表示部とを有する進入不可表示器を設け、前記監視制御手段が停止線灯を点灯する際に進入不可表示器の進入不可マーク表示部を点灯表示し、進入不可とすることにより、滑走路に着陸後の航空機と誘導路走行中の航空機との衝突を回避する灯火制御を実施する構成である。
【発明の効果】
【0017】
本発明によれば、滑走路に着陸後の航空機と誘導路走行中の航空機との衝突を自動的に回避するための灯火制御を実施でき、航空機からの視覚航行援助機能を発揮でき、ひいては地上走行の更なる安全性及び地上管制を司る管制官の業務の軽減化を図る地上走行誘導支援システムを提供できる。
【図面の簡単な説明】
【0018】
【図1】本発明に係る地上走行誘導支援システムの一実施の形態を示す構成図。
【図2】高速離脱誘導路手前の滑走路側方に設置される進入不可表示器の表示態様例を示す図。
【図3】本発明に係る地上走行誘導支援システムの処理動作の流れを説明するフロー図。
【図4】滑走路と誘導路との間に高速離脱誘導路等を設けた飛行場の平面図。
【発明を実施するための形態】
【0019】
以下、本発明の実施の形態について図面を参照して説明する。
図1は本発明に係る地上走行誘導支援システムの一実施の形態を示す構成図である。
【0020】
地上走行誘導支援システムは、大きく分けて、地上灯火設備系1と灯火監視制御系2とで構成される。
【0021】
地上灯火設備系1は、図4と同様に滑走路11と誘導路12との間に高速離脱誘導路13や連絡誘導路14が設けられ、滑走路11にはその滑走路中心線に沿って滑走路中心線灯21,…が設置され、また誘導路22には誘導路中心線に沿って誘導路中心線灯22,…が設置されている。
【0022】
高速離脱誘導路13は、滑走路11に着陸した航空機16が滑走路11から離脱して誘導路12に進入していくための誘導路であって、中心線に沿って誘導路中心線灯22a,…が設置され、さらに滑走路11との境界部分に停止線灯23,…が設置されている。
【0023】
また、滑走路11及び誘導路12には、予め定める区間ごとに航空機検知センサ(図示せず)が設置され、隣接する各区間の境界を通過する際に航空機16,17の現在位置情報を取得し、無線通信または有線通信により後記する監視制御装置31に送信する構成である。
【0024】
さらに、高速離脱誘導路13の手前側の滑走路11側方に、着陸後の航空機16の高速離脱誘導路13への進入を不可とする進入不可表示器24が設けられている。なお、進入不可表示器24は、着陸した航空機16の走行路を表す走行路マーク24aと、進入不可とする走行路マーク24a側に例えば赤色により×印マークにて点灯表示する進入不可マーク表示部24bとからなり、例えば図2(a)〜(d)に示すように幾つかの表示形態のものがある。
【0025】
灯火監視制御系2としては、灯火に関する誘導指示を行う監視制御装置31が伝送LAN32を介して空港地表レーダ33及び少なくとも1台の灯火制御装置34と接続されている。各灯火制御装置34には、制御LAN35を介して少なくとも1台の中継伝送装置36が接続されている。
【0026】
中継伝送装置36は、定電流制御電源(CCR)37の出力側に環状に接続されてなる電力線38にゴムトランス39cを介して接続され、監視制御装置31から灯火制御装置34を介して受ける灯火制御指令をゴムトランス39cを経由して電力線38に重畳して搬送する。
【0027】
環状化されている電力線38にはそれぞれゴムトランス391,392,…,39n-20,…を介して末端制御装置401,…,40n-20,…が接続され、地上灯火設備系1を構成する誘導路中心線灯22等の点灯・消灯制御を実施するとともに、現在の灯火の状態を対応するゴムトランス391,…,39n-20,…、中継伝送装置36、灯火制御装置34を経由させて監視制御装置31に送信する。
【0028】
監視制御装置31は、管制官が航空機の安全走行に関する操作指示を入力するためのキーボード,マウス,操作スイッチ等の入力部31Aと、運行計画情報に基づいて各航空機の走行経路を決定し、かつ、飛行場に設置される空港地表レーダ33によって捕捉される航空機の画像データの大まかな位置と、前述した航空機検知センサからの各航空機の現在位置情報とに基づき、灯火制御指令を出力する監視操作卓31Bと、飛行場全体のシミュレーションモデルの中に現在位置情報に基づく各航空機を表示する表示部31Cとが設けられている。
【0029】
次に、以上のように構成された地上走行誘導支援システムの動作について説明する。
【0030】
従来、予め各航空機の便名に関する運行計画情報に基づき、エプロンから当該便名の航空機17の離陸場所に至るまでの走行経路が自動的に設定される。
【0031】
よって、監視制御装置31は、自動走行経路に従い、空港地表レーダ33や航空機検知センサからの航空機17の現在位置情報、末端制御装置401,…,40n-20,…,40nから上がってくる誘導路中心線灯22,…の灯火情報及び管制官による目視等に基づき、監視操作卓31Bから灯火制御指令を出力する。
【0032】
因みに、着陸した航空機16が高速離脱誘導路13の手前側の滑走路11を高速走行している際、誘導路12上に存在する航空機17が連絡誘導路14から滑走路11に入らないように停止線灯15を点灯するか、あるいは停止線灯15の点灯のもとに、着陸した航空機16が高速離脱誘導路13に進入させないようにしている。
【0033】
しかし、管制官が十分に目視確認し難い低視程時、着陸直後の航空機16が滑走路11上を高速走行しており、管制官による誘導指示の遅れや指示誤りが発生すると、高速離脱誘導路13に進入し、航空機17と衝突する危険性がある。
【0034】
そこで、監視制御装置31は図3に示すような処理の流れに従って動作する。
監視制御装置31は、誘導路12に設置された航空機検知センサなどから航空機位置情報を取得し、表示部31Cに表示される誘導路21の該当位置に航空機17が表示される。監視制御装置31は、航空機17が高速離脱誘導路13の手前で連絡誘導路14近傍に存在するか否かを判断する(S1)。
【0035】
ここで、航空機17が存在すると判断したとき、滑走路11に沿って設置される航空機検知センサの航空機位置情報や空港地表レーダ33による航空機の位置情報に基づき、着陸した航空機16が高速離脱誘導路13の手前を走行しているか否かを判断する(S2)。表示部31Cに表示される滑走路11上の航空機16が高速離脱誘導路13の手前を走行していないと判断したときには、管制官が自動走行経路、航空機の位置及び目視に基づき灯火制御指令を出力し(S3)、航空機17に関する誘導指示を与えつつステップS1に戻り,同様の処理を繰り返す。
【0036】
ところで、ステップS1にて航空機17が高速離脱誘導路13の手前で連絡誘導路14近傍に存在し、かつ、ステップS2にて航空機16が高速離脱誘導路13の手前を走行していると判断すると、少なくとも高速離脱誘導路13側の停止線灯23を赤色点灯し(S4)、航空機16が高速離脱誘導路13に進入しないように制御する。
【0037】
さらに、引き続き、監視制御装置31は、進入不可表示器24を表示するか否かを判断する(S5)。表示するフラグが立っている場合には進入不可表示器24の進入不可マーク表示部24bである例えば×印マークを赤色点灯した後(S6)、前述したステップS3と同様に航空機17に誘導指示を出す一方、航空機16の高速走行を追尾し、必要に応じて連絡誘導路14側の停止線灯15を点灯する。
【0038】
そして、航空機16が高速離脱誘導路13を通過したことを確認すると(S8)、停止線灯23及び進入不可表示器24を消灯する(S9)。なお、連絡誘導路14側の停止線灯15が点灯している場合には、航空機16が連絡誘導路14を通過したことを確認し、停止線灯15を消灯する。
【0039】
従って、以上のような実施の形態によれば、誘導路12を走行する航空機17が高速離脱誘導路13の手前で連絡誘導路14近傍に存在するとき、滑走路11に着陸した航空機16が高速走行で高速離脱誘導路13の手前に存在するとき、高速離脱誘導路13側の停止線灯23を点灯し、進入不可表示器24の進入不可マーク表示部24bを赤色点灯することにより、航空機16のパイロットは進入不可マーク表示部24bの赤色点灯及び停止線灯23の点灯により、高速離脱誘導路13に進入不可経路であると容易に認識でき、誘導路12を走行中の航空機17とのニアミス事故や衝突事故を確実に回避することができる。
【0040】
よって、航空機への正確な視覚航行援助機能を十分に発揮でき、ひいては飛行場運用の効率化、航空機同士の地上走行の安全を十分に確保することができ、地上管制を司る管制官の業務の軽減化にも大きく貢献できる。
【0041】
その他、本発明は、上記実施の形態に限定されるものでなく、その要旨を逸脱しない範囲で種々変形して実施できる。
【0042】
上記実施の形態では、管制官が十分に目視確認し難い低視程時であることを前提に図3に示す一連の処理動作を行うことを述べたが、滑走路11上の航空機16及び誘導路12上の航空機17が所定の位置関係にあるとき、低視程時の有無に拘らず、停止線灯23及び進入不可マーク表示部24bを点灯する構成であっても良い。
【符号の説明】
【0043】
1…地上灯火設備系、2…灯火監視制御系、11…滑走路、12…誘導路、13…高速離脱誘導路、14…連絡誘導路、15…停止線灯、16,17…航空機、21…滑走路中心線灯、22,22a,22b…誘導路中心線灯、23…停止線灯、24…進入不可表示器、31…監視制御装置、31A…入力部、31B…監視操作卓、31C…表示部、33…空港地表レーダ、34…灯火制御装置、36…中継伝送装置、37…定電流制御電源(CCR)、38…電力線、39c,391,…,39n-20,… …ゴムトランス、401,…,40n-20,… …末端制御装置。
【特許請求の範囲】
【請求項1】
誘導路と滑走路の間に少なくとも高速離脱誘導路が設けられ、誘導路上を走行する第1の航空機を滑走路側に誘導し、かつ、滑走路に着陸した第2の航空機を誘導路側に誘導する地上走行誘導支援システムにおいて、
前記高速離脱誘導路の前記滑走路境界部分に横断するように設置された停止線灯と、
前記高速離脱誘導路の手前側となる前記誘導路上に前記第1の航空機が存在し、かつ、前記着陸した前記第2の航空機が前記高速離脱誘導路の手前側となる前記滑走路上を高速走行しているとき、前記停止線灯を点灯して前記第2の航空機の前記高速離脱誘導路への進入を禁止する監視制御手段と
を備えたことを特徴とする地上走行誘導支援システム。
【請求項2】
請求項1に記載の地上走行誘導支援システムにおいて、
前記高速離脱誘導路の手前側に位置する前記滑走路の側方に、前記着陸した第2の航空機の走行路を表す走行路マークと当該走行路マークのうち進入不可とする走行路マーク側に配置した進入不可マーク表示部とを有する進入不可表示器を設け、
前記監視制御手段が前記停止線灯を点灯する際に前記進入不可表示器の進入不可マーク表示部を点灯表示することを特徴とする地上走行誘導支援システム。
【請求項3】
請求項1または請求項2に記載の地上走行誘導支援システムにおいて、
前記監視制御手段は、背景輝度が昼間、視程の悪い状態、雲底高が低い状態等の周囲環境において、前記誘導路中心線灯や前記滑走路中心線灯の灯火を明るく制御する際、前記請求項1または請求項2に記載する前記停止線灯や前記進入不可表示器の進入不可マーク表示部を点灯することを特徴とする地上走行誘導支援システム。
【請求項1】
誘導路と滑走路の間に少なくとも高速離脱誘導路が設けられ、誘導路上を走行する第1の航空機を滑走路側に誘導し、かつ、滑走路に着陸した第2の航空機を誘導路側に誘導する地上走行誘導支援システムにおいて、
前記高速離脱誘導路の前記滑走路境界部分に横断するように設置された停止線灯と、
前記高速離脱誘導路の手前側となる前記誘導路上に前記第1の航空機が存在し、かつ、前記着陸した前記第2の航空機が前記高速離脱誘導路の手前側となる前記滑走路上を高速走行しているとき、前記停止線灯を点灯して前記第2の航空機の前記高速離脱誘導路への進入を禁止する監視制御手段と
を備えたことを特徴とする地上走行誘導支援システム。
【請求項2】
請求項1に記載の地上走行誘導支援システムにおいて、
前記高速離脱誘導路の手前側に位置する前記滑走路の側方に、前記着陸した第2の航空機の走行路を表す走行路マークと当該走行路マークのうち進入不可とする走行路マーク側に配置した進入不可マーク表示部とを有する進入不可表示器を設け、
前記監視制御手段が前記停止線灯を点灯する際に前記進入不可表示器の進入不可マーク表示部を点灯表示することを特徴とする地上走行誘導支援システム。
【請求項3】
請求項1または請求項2に記載の地上走行誘導支援システムにおいて、
前記監視制御手段は、背景輝度が昼間、視程の悪い状態、雲底高が低い状態等の周囲環境において、前記誘導路中心線灯や前記滑走路中心線灯の灯火を明るく制御する際、前記請求項1または請求項2に記載する前記停止線灯や前記進入不可表示器の進入不可マーク表示部を点灯することを特徴とする地上走行誘導支援システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−28579(P2011−28579A)
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願番号】特願2009−174633(P2009−174633)
【出願日】平成21年7月27日(2009.7.27)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願日】平成21年7月27日(2009.7.27)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]