
地中レーダ
【課題】地中の埋設物を探知する地中レーダにおいて、路面上等に埋設物の埋設位置を容易に表示可能にする。
【解決手段】電磁波を送出する電磁波送信部5とこの電磁波の反射波を受信する電磁波受信部6とを備えたレーダ本体2を有し、電磁波受信部5からの受信波データAにより埋設物を探知する地中レーダ1において、レーダ本体2の移動位置を測定する位置測定部3と、レーダ本体2を移動させて埋設物を探知する際の受信波データAと受信波データA取得時に位置測定部3で得られるレーダ本体2の位置データBとに基づいて定まる埋設物の埋設位置データCを記憶する記憶部8と、再度、レーダ本体2を移動させた時に、当該移動の際に位置測定部3で得られるレーダ本体2の位置データBと記憶部8に既に記憶されている埋設位置データCとに基づいて埋設物11の埋設位置を表示する表示部4とを備える。
【解決手段】電磁波を送出する電磁波送信部5とこの電磁波の反射波を受信する電磁波受信部6とを備えたレーダ本体2を有し、電磁波受信部5からの受信波データAにより埋設物を探知する地中レーダ1において、レーダ本体2の移動位置を測定する位置測定部3と、レーダ本体2を移動させて埋設物を探知する際の受信波データAと受信波データA取得時に位置測定部3で得られるレーダ本体2の位置データBとに基づいて定まる埋設物の埋設位置データCを記憶する記憶部8と、再度、レーダ本体2を移動させた時に、当該移動の際に位置測定部3で得られるレーダ本体2の位置データBと記憶部8に既に記憶されている埋設位置データCとに基づいて埋設物11の埋設位置を表示する表示部4とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地中の埋設物を探知する地中レーダに関し、詳しくは、路面上等に埋設物の埋設位置を容易に表示することが可能な地中レーダに係るものである。
【背景技術】
【0002】
道路工事や鉄道軌道の改良工事等において、例えば、コンクリート等の掘削作業を伴って行うことがある。この様な掘削作業に先立って、ガス管、水道管、電力ケーブル等の既設の設備の埋設状況を調査して、作業の安全確保を図ることがある。この様な埋設状況の調査は、一般的に、調査エリアを予め定めて、オペレータ等が、地中レーダを移動操作し、その後オペレータ等が、地中レーダから得られた各種データを解析することによって行われている。
【0003】
ここで、この種の地中の埋設状況の調査に用いる地中レーダとしては、例えば、特許文献1等に記載されたものがある。特許文献1に記載された地中レーダは、地中に向けて電磁波を送出する電磁波送信部と、送出された電磁波の反射波を受信する電磁波受信部とを備えたレーダ本体を有し、電磁波受信部によって受信された電磁波に基づく受信波データ等により地中に埋設された埋設物を探知する構成である。この種の一般的な地中レーダを用いて埋設状況を調査する場合、地中レーダのオペレータ等は、例えば、調査エリア内に測定線を格子状に設定し、掘削する路面等にチョーク等でその測定線を描き、次に、レーダ本体をその測定線に沿って移動操作して、埋設物の探知を行う。そして、オペレータ等は、得られた受信波データ等を解析してその解析結果に基づいてどの測定線のどの位置に埋設物が埋っているか判断し、最後に、オペレータ等は、既に路面等に描かれている測定線を基準にして巻尺等を利用して、路面上等に埋設位置をチョーク等によりマーキングする。このようにして、掘削作業者等が埋設物の埋設位置を識別できるようにして、掘削作業の安全が確保されるようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−151603号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来、この種の地中レーダを用いて埋設状況を調査する場合、オペレータ等は、地中のどこに埋設物が埋っているかを掘削作業者等が識別できるように、巻尺等を利用して路面上等に埋設位置を表示しなければならず、埋設状況の調査作業の作業負荷が高いという問題がある。
【0006】
そこで、本発明は前述の問題点に対処し、路面上等に埋設物の埋設位置を容易に表示することが可能な地中レーダを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明による地中レーダは、地中に向けて電磁波を送出する電磁波送信部と、送出された該電磁波の反射波を受信する電磁波受信部とを備えたレーダ本体を有し、該電磁波受信部によって受信された電磁波に基づく受信波データから地中に埋設された埋設物を探知する地中レーダにおいて、予め定めた探知エリア内での前記レーダ本体の移動位置を測定する位置測定部と、前記探知エリア内で前記レーダ本体を移動させて埋設物を探知する際の前記受信波データと、この受信波データを取得した時に前記位置測定部によって得られる前記レーダ本体の位置データとに基づいて定まる埋設物の埋設位置データを記憶する記憶部と、再度、前記探知エリア内で前記レーダ本体を移動させた時に、当該移動の際に前記位置測定部によって得られるレーダ本体の位置データと、前記記憶部に既に記憶されている前記埋設位置データとに基づいて、前記探知エリア上に埋設物の埋設位置を表示する表示部と、を備えたものである。
【0008】
このような構成により、埋設物の探知エリア内でレーダ本体を移動させて埋設物を探知する際の受信波データと、この受信波データを取得した時に位置測定部によって得られるレーダ本体の位置データとに基づいて定まる埋設物の埋設位置データを記憶部は記憶する。その後、再度、探知エリア内でレーダ本体を移動させると、この移動の際に位置測定部から得られるレーダ本体の位置データと、記憶部に既に記憶されている埋設位置データとに基づいて、探知エリア上に埋設物の埋設位置を表示部によって表示する。
【発明の効果】
【0009】
本発明によれば、埋設物の探知エリア内でレーダ本体を移動させ、各位置で得られる受信波データと、この受信波データと関連付けた位置データとに基づいて定まる埋設物の埋設位置データを記憶することができ、再度、探知エリア内でレーダ本体を移動させることにより、例えば、この移動の際に位置測定部により得られるレーダ本体の位置データが、記憶部に既に記憶されている埋設位置データと略一致したことに基づいて、探知エリア上に埋設物の埋設位置を表示することができる。したがって、地中レーダのオペレータ等は、巻尺等を利用して探知エリア上で採寸して埋設位置をマーキング等する必要がないため、埋設状況の調査作業の作業負荷を低減させることができる。また、本発明の地中レーダは、探知結果を解析した後に、探知エリア上に埋設位置を表示する構成であるため、小石等と配管の区別をした上で、埋設物の埋設位置を表示することができる。したがって、掘削作業をするにあたって作業上支障のない、例えば、小石等の埋設位置については表示(ペイント噴霧、レーザ光投影等)しないようにすることができるため、無駄な識別表示を無くすことができるという利点もある。
【図面の簡単な説明】
【0010】
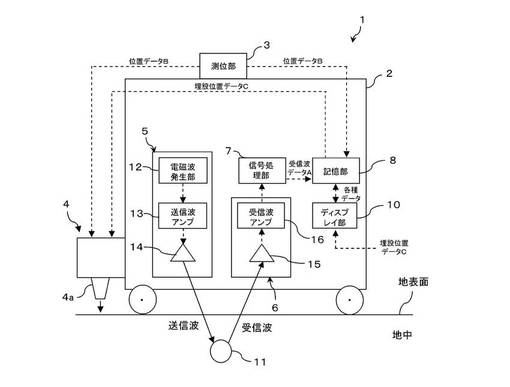
【図1】本発明による地中レーダの第1実施形態を示す構成図である。
【図2】上記実施形態の地中レーダを用いた埋設物の探知を説明する図で、(a)は地中レーダと埋設物の埋設状況を示す図で、(b)は電磁波受信部の受信波形である。
【図3】上記実施形態の地中レーダを用いた埋設物の探知を説明する別の図で、(a)は地中レーダと埋設物の埋設状況を示す図で、(b)は電磁波受信部の受信波形である。
【図4】上記実施形態におけるディスプレイ部が表示する探知結果の画像表示例を示す図である。
【図5】上記実施形態の地中レーダを用いて、地中の埋設状況を調査する手順を説明する図で、(a)は探知エリアの上面図であり、探知エリア上に測定線を描いた状況を示し、(b)はA−A線断面図、(c)は探知結果、(d)は埋設位置の推定図、(e)は探知エリア上に埋設位置を表示した状況を示す図である。
【図6】上記実施形態の地中レーダを用いて、地中の埋設状況を調査する手順を示す作業フロー図である。
【図7】本発明による地中レーダの第2実施形態を示す構成図である。
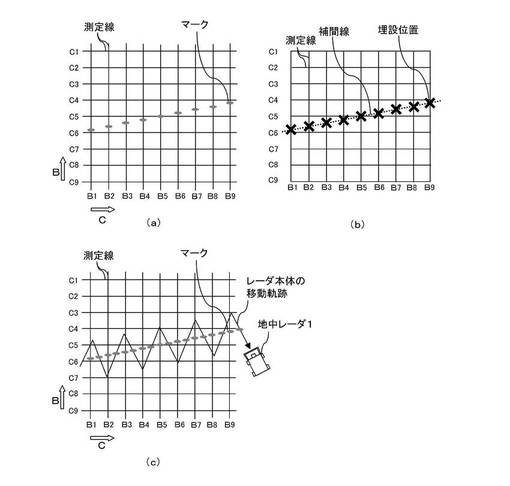
【図8】上記実施形態の地中レーダを用いて、地中の埋設状況を調査する手順を説明する図で、(a)は探知エリア上に埋設位置が表示された状況を示し、(b)は補間線、(c)は埋設位置を補間して埋設位置を表示する状況を示す。
【図9】本発明による地中レーダの第3実施形態を示す構成図である。
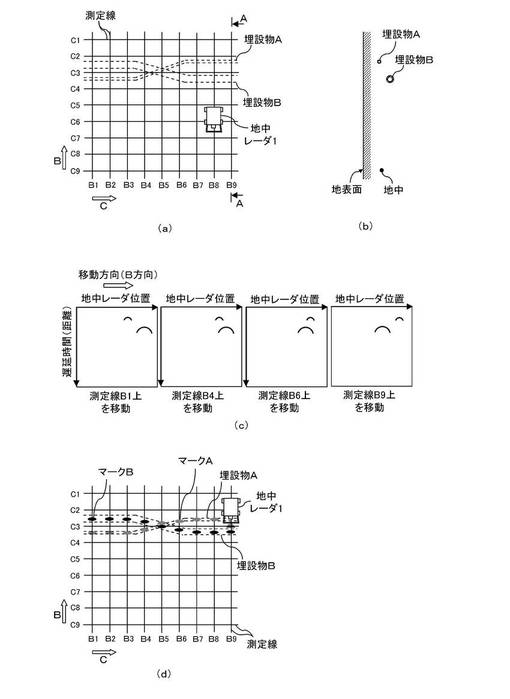
【図10】上記実施形態の地中レーダを用いて、地中の埋設状況を調査する手順を説明する別の図で、(a)は探知エリアの上面図であり、探知エリア上に測定線を描いた状況を示し、(b)はA−A線断面図、(c)は探知結果、(d)は探知エリア上に埋設位置を表示した状況を示す図である。
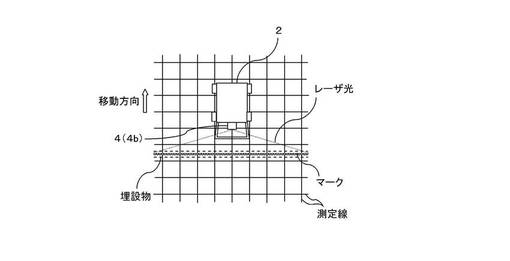
【図11】本発明による地中レーダの表示部の別の構成例を説明する図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態を添付図面に基づいて詳細に説明する。
図1は本発明による地中レーダの第1実施形態を示す構成図である。
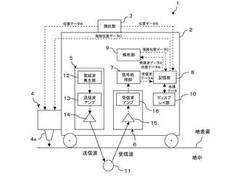
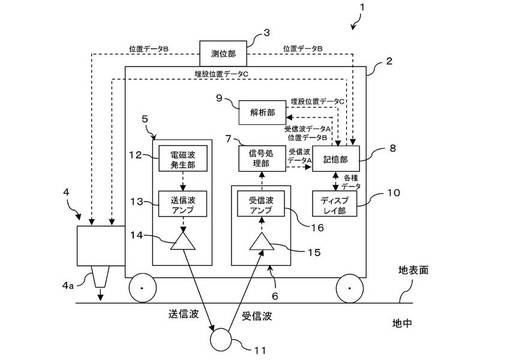
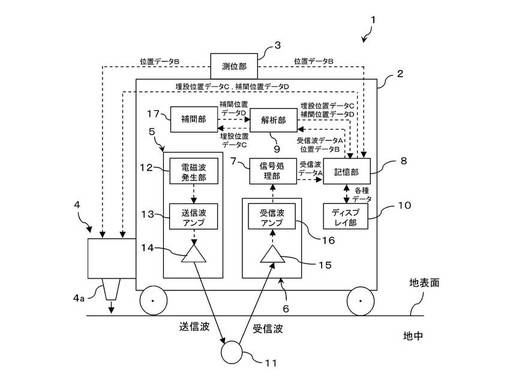
図1において、本実施形態の地中レーダ1は、レーダ本体2と、位置測定部3と、表示部4とを備えて構成され、レーダ本体2は、電磁波送信部5と、電磁波受信部6と、信号処理部7と、記憶部8と、解析部9と、ディスプレイ部10とを備えて成る。
【0012】
上記レーダ本体2は、前述したように電磁波送信部5と電磁波受信部6等を備えて、電磁波送信部5によって地中に向けて電磁波を送出し、電磁波受信部6によって受信された電磁波に基づく受信波データAから、地中に埋設された埋設物11の埋設状況を探知する本体となるものである。レーダ本体2は、例えば、図1に示すように、その底部に車輪が取り付けられている。また、後述する図2(a)に示すように、レーダ本体2の上部等には取手が取り付けられており、オペレータ等によってレーダ本体2を、埋設状況の探知エリア内を容易に移動できるようになっている。
【0013】
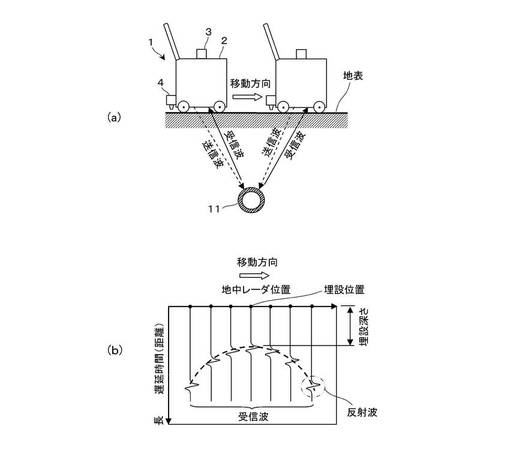
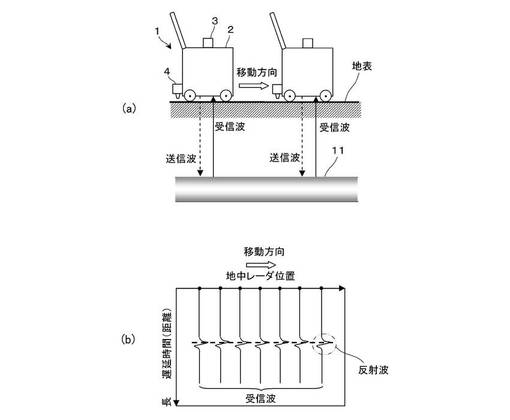
上記埋設物11は、例えば、金属管や塩化ビニール管等であり、図2(a)に示すように、レーダ本体2の移動方向と直交する方向(図面上垂直方向)に延伸して埋設されている場合や、後述する図3(a)に示すように、移動方向と平行な方向に延伸して埋設されている場合等、様々な場合がある。
【0014】
上記電磁波送信部5は、図1に示すように、電磁波(送信波)を地中に向けて送出するものであり、電磁波を発生する電磁波発生部12と、電磁波発生部12から発生した電磁波の出力を増幅させる送信波アンプ13と、増幅された電磁波を地中に向けて送出する送信アンテナ14とを備えている。
【0015】
上記電磁波受信部6は、送出された電磁波(送信波)に基づいて反射された電磁波(受信波)を受信して、出力を増幅させるもので、図1に示すように、反射された電磁波を受信する受信アンテナ15と、受信した電磁波の出力を増幅させる受信波アンプ16とを備えている。
【0016】
上記信号処理部7は、受信波アンプ16から出力される信号を処理する一般的なものであり、図示省略するが、例えば、受信波の高調波ノイズを除去する波形処理部を備えている。信号処理部7で処理された受信波の受信波データAは、後述するように、受信波が受信された際に位置測定部3によって得られるレーダ本体2の位置データBと関連付けて記憶部8に記憶される。
【0017】
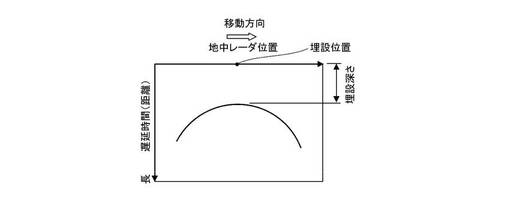
ここで、図2(a)は、例えば、配管等の埋設物11の正確な埋設位置については不明だが、埋設物11が図面垂直方向に延伸して埋設されていることについては予め分かっている場所において、レーダ本体2を埋設物11と直交する方向に移動させて、埋設物11を探知する状況を表している。また、図2(b)は、図2(a)の状況において、電磁波送信部5から電磁波を複数の位置で送出した場合に、受信アンテナ15が各位置において受信した反射波の波形を各位置における送信波の送信時刻を時間の始まりとして時間シフトさせ、各位置における受信波の波形を表示した図である。図2(b)の縦軸は電磁波を送出してから反射波が受信されるまでの遅延時間を表し、下に行くほど、遅延時間が長く、アンテナと埋設物11の距離が遠いことを示し、上に行くほど、遅延時間が短く、距離が近いことを示す。図2(b)に破線で示すように、アンテナと埋設物11の距離が徐々に近くなり、その後遠くなるような場合、距離が一番近くなったところが埋設物11の真上であることを示し、この時の探知エリアにおけるレーダ本体2の探知エリア上の平面的な位置は、後述するように位置測定部3によって測定されるため、埋設物11の真上の位置、すなわち、埋設位置が分かる。また、距離が一番近くなったところの距離は、埋設物の地表面からの埋設深さを示す。したがって、埋設物11の概略の配置方向が予め分かっている場合は、埋設物11の上を横切るようにして、レーダ本体2を移動させて探知すると、埋設物11の正確な埋設位置及び埋設深さを特定することができる。
【0018】
次に、図3(a)は、例えば、配管等の埋設物11の正確な埋設位置については不明だが、埋設物11が図面左右方向に延伸して埋設されていることについては予め分かっている場所において、レーダ本体2を埋設物11と平行する方向に移動させ、埋設物11を探知する状況を表している。図3(b)は、図3(a)の状況において、図2(b)で説明した方法で各位置における受信波を表示した図であり、破線で示すようにアンテナと埋設物11の距離が一定の関係で、埋設物11が埋設されていることを示している。しかし、埋設物11の真上を移動させたかどうかについては分からないため、正確な埋設位置及び深さを特定することはできない。したがって、埋設物11の正確な埋設位置及び深さを特定したい場合は、埋設物11を横切るように、レーダ本体2を移動させて探知することが望ましい。
【0019】
図2及び図3においては、配管等の埋設物11がどのような方向に延伸して埋設されているかが予め分かっている場所において、レーダ本体2を一方向に移動する場合を説明したが、一般的に、埋設物11がどのような方向に延伸して埋設されているかについて分かっていない場合もある。このような場合において、埋設物11の正確な埋設位置を特定したい場合は、例えば、レーダ本体2を、探知エリア内で格子状に設定された測定線上に沿って移動させることにより、いずれかの測定線上においてレーダ本体2が埋設物11を横切るようにして、埋設物11の探知を行うとよい。
【0020】
上記記憶部8は、埋設物11の探知エリア内でレーダ本体2を移動させて埋設物11を探知する際の受信波データAと、この受信波データAを取得した時に位置測定部3によって得られるレーダ本体2の位置データBとに基づいて定まる埋設物11の埋設位置データCを記憶するものである。本実施形態において、埋設位置データCは、記憶部8に記憶された受信波データAと位置データBとに基づいて、後述する解析部9によって求められたデータである。また、記憶部8は、受信波データAと位置データBとを関連付けて記憶することも可能であり、後述するディスプレイ部10は、例えば、この記憶部8に記憶された受信波データA及び位置データBに基づいて探知結果を画像表示できるように構成されている。
【0021】
上記解析部9は、探知エリア内でレーダ本体2を移動させて埋設物11を探知した時に得られた受信波データAと位置データBとに基づいて、埋設位置を求めて埋設位置データCを出力するものである。解析部9は、例えば、埋設位置データCを記憶部8に出力し、記憶部8は、解析部9によって出力されたこの埋設位置データCを記憶する。例えば、レーダ本体2を所定の測定線上に沿って一方向に移動させて埋設物11を探知した場合、解析部9は、記憶部8に記憶された受信波データAと位置データBとに基づいて、後述するディスプレイ部10と同様にして求める探知結果の波形(図4参照)データ内に、上に凸の円弧形状が含まれるかを解析し、円弧形状が含まれる場合は、円弧の頂点における位置データBを、埋設物11の埋設位置データCとして特定して記憶部8に出力し、以降、探知エリア内に設定された各測定線での探知結果に対して、上記と同様にして埋設位置データCを求めて、探知エリア全体についての完全な埋設位置データCを求める。
【0022】
上記ディスプレイ部10は、埋設物11の探知結果等を画像表示するものである。ディスプレイ部10は、例えば、レーダ本体2を一方向に移動させ、電磁波送信部5から電磁波を複数の位置で送出した場合に、受信アンテナ15が各位置において受信した電磁波の受信波データAを記憶部8から読み出し、受信波データA内の時間データを各位置における送信波の送信時刻を時間の始まりとして時間シフトさせると共に、受信強度を濃淡で表示して、さらに、各受信波データAと関連付けて記憶部8に記憶された位置データBに基づいて位置シフト(レーダ本体2の移動方向へのシフト)させて、各位置における埋設物11の探知結果を画像表示する。ここで、図4は、図2(a)と同様に、埋設物11を横切るように、レーダ本体2を移動させた場合に、ディスプレイ部10が表示する探知結果の画像表示例を示す図である。なお、図4においては、図の簡略化のため、各位置において受信強度の一番高い箇所のみ表示し、他の箇所については省略して示している。また、このディスプレイ部10は、解析部9によって求められた埋設位置データCに基づいて、後述する図5(d)に示す埋設位置の推定図を表示することもできる。
【0023】
上記位置測定部3は、予め定めた探知エリア内での前記レーダ本体2の移動位置を測定するものである。本実施形態において、位置測定部3は、GPS(Global Positioning System:全地球測位システム)を用いてレーダ本体2の移動位置を測定するように構成されており、図1に示すように、例えば、レーダ本体2の上面に設けられている。この位置測定部3によって得られるレーダ本体2の位置データBは、前述したように、その位置で受信した受信波の受信波データAと関連付けられて記憶部8に記憶される。
【0024】
上記表示部4は、埋設物11の探知エリア内でレーダ本体2を移動させて埋設物を探知した後、再度探知エリア内でレーダ本体2を移動させた時に、この移動の際に位置測定部3によって得られるレーダ本体2の位置データBと、記憶部8に既に記憶されている埋設位置データCとに基づいて、探知エリア上に埋設物の埋設位置を表示するものである。
【0025】
本実施形態において、表示部4は、埋設位置にペイントを噴霧することにより埋設位置を表示するものであり、例えば、インクジェット式によるマーキング手段4aを備えている。本実施形態においては、埋設物を探知した後、再度探知エリア内でレーダ本体2を移動させると、表示部4は、例えば、この移動の際に位置測定部3により得られるレーダ本体2の位置データBが、記憶部8に既に記憶されている埋設位置データCと略一致したことに基づいて、探知エリア上の埋設位置にペイントを噴霧する。なお、表示部4は、図1等に示すように、位置測定部3と異なる位置に取り付けられているが、この位置の差異を考慮してペイントの噴霧タイミングを制御しており、このように制御することにより、埋設位置にペイントを噴霧可能に構成されている。
【0026】
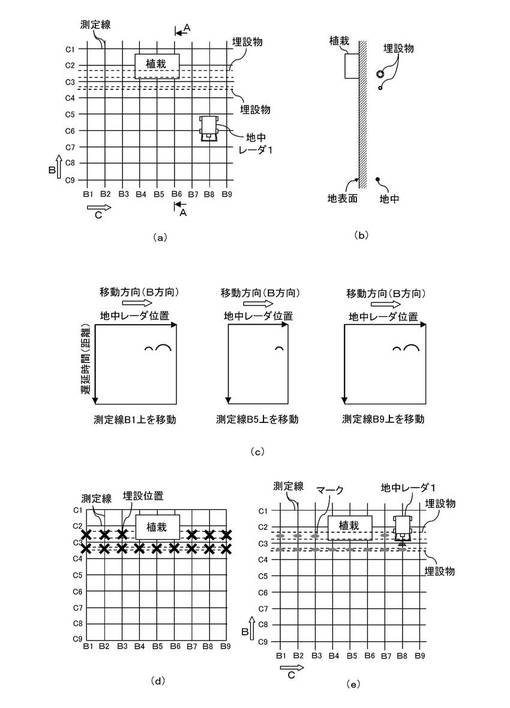
次に、このように構成された地中レーダ1を用いて、埋設物11の埋設状況を調査する作業の流れ及び地中レーダ1の動作を、図5(a)及び図5(b)に示すように、2本の配管が平行に埋設されている探知エリア内を調査する場合を例として、図5及び図6を参照して説明する。なお、下記の説明においては、調査前に埋設物11がどのような方向に延伸して埋設されているかについて分かっていないものとし、前述したように、レーダ本体2を、探知エリア内で格子状に設定された測定線上に沿って移動させて探知する場合で説明する。
【0027】
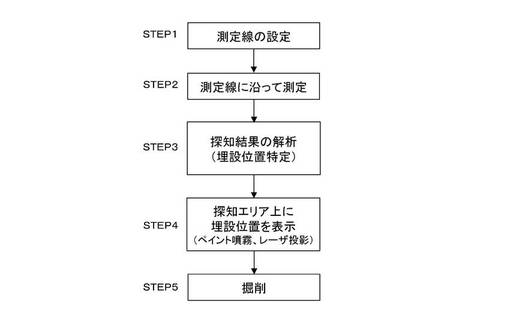
まず、オペレータ等は、図5(a)に示すように、探知エリア全体を網羅するように、格子状に測定線(B1〜B9,C1〜C9)を設定し、その測定線を探知エリアの地表面等にチョーク等で描画する(STEP1)。
【0028】
そして、オペレータ等は、例えば、測定線B1の一端(図5(a)の下側)から測定線B1に沿ってレーダ本体2を移動できるように配置し、地中レーダ1の電源を入れる。測定準備ができたら、オペレータ等は、例えば、測定開始スイッチ等を押すと共に、測定線B1に沿ってレーダ本体2を一方向(図5(a)の矢印B方向)に押して、測定線B1の他端(図5(a)の上側)まで移動させる。この移動の際、電磁波発生部12は、電磁波を複数の位置で発生し、送信波アンプ13は、電磁波発生部12から発生した電磁波の出力を増幅させ、送信アンテナ14は、増幅された電磁波を複数の位置で地中に向けて送出する。そして、送信アンテナ14から一波目の電磁波が送出されると、受信アンテナ15は、送信アンテナ14から送出された電磁波(送信波)に基づいて反射された一波目の電磁波(受信波)を受信し、受信波アンプ16は、受信アンテナ15が受信した電磁波の出力を増幅させ、信号処理部7へ一波目の受信波の信号を出力する。信号処理部7は、例えば、受信波の信号内の高調波ノイズを除去し、ノイズ除去後の受信波の信号を一波目の受信波データAとして、記憶部8へ出力する。この受信波データAは、受信された際に位置測定部3によって得られるレーダ本体2の位置データBと共に記憶される。そして、レーダ本体2の測定線B1の他端までの移動の際に送出される2波目以降の電磁波は、上記と同様にして電磁波受信部6において受信されて、各位置における受信波データAと位置データBが記憶部8に記憶される。レーダ本体2が測定線B1の他端に到達すると、オペレータ等は、例えば、測定中断スイッチ等を押し、次の測定線の一端、例えば、測定線B2の一端(図5(a)の下側)から測定線B2に沿ってレーダ本体2を移動できるように配置し、測定線B1上での測定と同様にして測定する。以降、同様にして、各測定線(B3〜B9,C1〜C9)上の測定を行う。なお、図5(a)に示すように、測定線(B4〜B6、C2及びC3)上に、植栽等の障害物が有る場合は、例えば、測定線の一端から測定を行い、障害物があるエリアでは測定を中断し、レーダ本体2を回避させて、その測定線上に再び移動させ、残りの測定を行うようにする(STEP2)。
【0029】
次に、解析部9は、ディスプレイ部10と同様にして探知結果の波形データを求め、この波形データ内に、上に凸の円弧形状が含まれるかを解析し、円弧形状が含まれる場合は、円弧の頂点における位置データBを、埋設物11の埋設位置データCとして特定して記憶部8に出力し、以降、探知エリア内に設定された各測定線での探知結果に対して、上記と同様にして埋設位置データCを求めて、探知エリア全体についての完全な埋設位置データCを求める。図5(c)は、解析部9が求めた測定線B1,B5,B9上での探知結果の波形例を示す図である。図5(c)の測定線B5上での探知結果の波形例には、円弧が一つしか示されていないが、これは測定線B5上には植栽が存在するため地中レーダのB方向の移動が制約されているからである。なお、図5(c)においては、図の簡略化のため、各位置において受信強度の一番高い箇所のみ表示し、他の箇所については省略して示している。また、解析部9は、図5(d)の×印で示すように、埋設物11の連続性が推定される場合は、埋設物11は配管等の延伸したものであると判定し、また、図示省略するが、連続性のない埋設位置データCが出力された場合は、その埋設位置データCに対応した位置に埋設されている埋設物11は、例えば、地中に埋っている小石等であると判定する。このように探知結果を解析して、埋設物11の埋設位置の特定を行う。なお、解析部9によって求められた埋設位置データCに基づいて、図5(d)に示すように、埋設位置に×印を示した埋設位置の推定図をディスプレイ部10に画面表示してもよい。(STEP3)。
【0030】
そして、上記のように探知結果の解析(埋設位置の特定)が完了すると、オペレータ等は、例えば、探知エリア上に描画されている測定線上に沿ってレーダ本体2を再度移動させる。オペレータ等が、レーダ本体2を移動させると、表示部4は、例えば、この移動の際に位置測定部3により得られるレーダ本体2の位置データBが、記憶部8に既に記憶されている埋設位置データCと略一致した時、位置測定部3と表示部4との位置の差異を考慮したタイミングで、例えば、赤色のペイントを噴霧して、楕円状のマークを埋設位置に表示する。なお、表示部4は、解析部9によって埋設物11が小石等、すなわち、掘削作業をするにあたって作業上支障のないものであると判定された場合は、ペイントを噴霧しないように制御する(STEP4)。最後に、掘削作業者は、路面等に表示されたマークに基づいて埋設物11の埋設位置を確認し、埋設物11を破損等しないようにして、掘削作業を行う(STEP5)。
【0031】
このような構成により、本実施形態における地中レーダ1によれば、探知エリア内でレーダ本体2を移動させ、各位置で得られる受信波データAと、この受信波データAと関連付けた位置データBとに基づいて、解析部9によって求めた埋設位置データCを記憶することができ、この特定された埋設位置データCと位置データBとに基づき埋設物11の埋設位置を表示することができ、再度、探知エリア内でレーダ本体2を移動させることにより、例えば、この移動の際に位置測定部4により得られるレーダ本体2の位置データBが、記憶部8に既に記憶されている埋設位置データCと略一致したことに基づいて、探知エリア上に埋設物11の埋設位置を表示することができる。したがって、地中レーダ1のオペレータ等は、巻尺等を利用して採寸してマーキング等する必要がないため、埋設状況の調査作業の作業負荷を低減させることができる。また、本発明の地中レーダは、埋設物11の探知結果を解析した後に、探知エリア上に埋設位置を表示する構成であるため、例えば、小石等と配管の区別をした上で、埋設物11の埋設位置を表示することができる。したがって、掘削作業をするにあたって作業上支障のない、例えば、小石等の埋設位置については表示(ペイント噴霧、レーザ光投影等)しないようにすることができるため、無駄な識別表示を無くすことができる。
【0032】
図7は、本発明による地中レーダの第2実施形態を示す構成図である。尚、図1と同一の要素には同一の符号を示して説明を省略し、異なる部分についてのみ以下に説明する。
【0033】
本実施形態において、地中レーダ1は、前述した埋設位置データC間を補間する補間位置データDを求める補間部17を備え、表示部4は、この補間位置データDと埋設位置データCとに基づき、探知エリア上に埋設位置を表示するように構成されている。具体的には、補間部17は、例えば、解析部9から得られる埋設位置データCに基づいて補間位置データDを求め、この補間位置データDを解析部9へ出力し、解析部9は、埋設位置データCと補間位置データDを記憶部8に出力して記憶させるように構成されている。
【0034】
図8は、本実施形態の地中レーダ1を用いて、地中の埋設状況を調査する手順を説明する図である。なお、図8(a)は、例えば、測定線に対して埋設物が斜めに交差する方向に延伸して埋設されている探知エリアにおいて、図5及び図6で説明した方法と同様にして、解析部9が求めた埋設位置データCのみによって探知エリア上に埋設位置を表示した状況を示している。
【0035】
ここで、表示部4が、図8(a)に示すように、測定線上に埋設位置を表示するのみでは、埋設状況等が分かり難い場合がある。本実施形態において、解析部9は、例えば、埋設位置(図8(b)の×印)の埋設位置データC間を補間する補間位置データDと埋設位置データCとに基づき、延伸して埋設されている埋設物11の探知エリア内での埋設位置全体を示す補間線を求め、表示部4は、この補間線の情報に基づき探知エリア上に埋設位置を表示可能に構成する。例えば、第1実施形態と同様にして、図8(a)に示すように、測定線上に埋設位置を表示し、その後、本実施形態においては、オペレータ等が、図8(c)に示すように、既に表示されたマークの間をレーダ本体2が通過するように移動操作すると、表示部4は、探知エリアにおいて仮想の補間線をレーダ本体2が横切った時に、位置測定部3と表示部4との位置の差異を考慮したタイミングで、ペイントを噴霧して、既に表示されたマークの間に、補間位置データDに基づく埋設位置を表示することができる。このようにして、埋設位置を表示することにより、埋設位置の表示箇所の間隔が密になり、埋設状況等がより分かり易くなる。なお、上記説明においては、埋設物11の埋設位置の表示は、図8(a)及び図8(b)に示すように、2回に分けて行う場合で説明したが、2回に分けずに1回で行ってもよい。この場合、例えば、探知エリア内で格子状に設定された測定線に沿ってレーダ本体2を移動して埋設物11の埋設位置を探知した後、オペレータ等は、図8(b)に示すようにディスプレイ部10に表示された前述の補間線と、路面等に描画された測定線との位置関係を参考にして、レーダ本体2が測定線上付近及びその測定線の中間において、仮想の補間線を横切るようにレーダ本体2を移動操作することにより、1回の移動操作によって、図8(c)に示すような表示箇所の間隔が密な埋設位置の表示を行うことができる。
【0036】
図9は、本発明に係る地中レーダの第3実施形態を示す構成図である。尚、図1に示した第1実施形態と同一の要素には同一の符号を示して説明を省略し、異なる部分についてのみ以下に説明する。
【0037】
本実施形態において、レーダ本体2は、上記第1実施形態で説明した解析部9を備えていない。本実施形態において、受信波データAと位置データBとに基づいて定まる埋設物11の埋設位置データCは、第1実施形態と異なり、オペレータ等によって定められる。本実施形態におけるディスプレイ部10は、第1実施形態と同様にして、探知結果を画像表示することができ、オペレータ等は、この画像表示された探知結果を解析し、探知エリアにおける埋設物11の埋設位置を特定して、埋設位置データCを求める。ディスプレイ部10は、オペレータ等によって特定された埋設位置の埋設位置データCが、例えば、タッチパネル上からオペレータ等によって入力可能に構成されている。そして、記憶部8は、オペレータ等によって入力された埋設位置データCを記憶できるように構成されている。
【0038】
なお、本実施形態の地中レーダ1を用いて、埋設物11の埋設状況を調査する作業の流れは、オペレータ等が自ら探知結果を解析し、埋設位置データCを入力すること以外については、第1実施形態と同じであるため説明を省略し、また、地中レーダ1の動作は、オペレータ等によって入力された埋設位置データCに基づきマーキングすること以外については、第1実施形態と同じであるため説明を省略する。
【0039】
このような構成によって、本実施形態における地中レーダ1によれば、オペレータ等によって入力された埋設位置データCを記憶することができ、第1実施形態と同様に、探知測定後に、再度レーダ本体2を移動させて、埋設位置データCと位置データBに基づいて探知エリア上に埋設位置を表示することができため、埋設状況の調査作業の作業負荷を低減させることができる。
【0040】
なお、本実施形態においても、第2実施形態において説明したように、補間位置データDと埋設位置データCとに基づいて埋設位置を表示する構成してもよい。この場合、オペレータ等は、例えば、埋設位置データCと補間位置データDを求めて、ディスプレイ部10等を介して、この埋設位置データCと補間位置データDを入力する。これにより、本実施形態においても、第2実施形態と同様に、埋設位置の表示箇所の間隔が密になり、埋設状況等がより分かり易くなる。
【0041】
上記の全ての説明において、埋設物11の埋設位置の表示は、例えば、赤色のペイントを噴霧して行うものとして説明したが、埋設位置の表示はこれに限らず、例えば、配管等の埋設物11の深さや、その概略の太さ及び形状、材質の違いによって、噴霧するペイントの色やパターンを区別して表示してもよい。埋設物11の深さは、電磁波を送出してから反射波が受信されるまでの遅延時間によって測定することができ、埋設物の概略の太さ及び形状は、受信波の形状をオペレータが解析する、または解析部9によって解析して区別することができ、埋設物の材質(金属、樹脂等)については、受信強度をオペレータが解析する、または解析部9によって解析して区別することができる。また、特定の深さ、太さ、形状、材質の埋設物の埋設位置のみを表示するようにしてもよい。
【0042】
上記のように、探知結果の解析に基づいて噴霧するペイントの色等を区別して表示する一例として、埋設物の深さによってペイントの色を区別する例を以下に説明する。図10(a)及び図10(b)に示すように、例えば、探知エリアにおいて、埋設物A(細い配管)より深い位置に埋設物B(太い配管)が埋設物Aと交差して地中に埋設されている状況において、第1実施形態と同様にして、探知エリア内を探知すると、ディスプレイ部10は、例えば、測定線B1,B4,B6,B9上の探知結果を、図10(c)に示すように画像表示する。この探知結果より、解析部9又はオペレータ等は、各位置において埋設物Aは埋設物Bより浅いところに埋設されているということを解析結果として得る。そして、例えば、埋設物Aの埋設位置においては赤色のペイントを噴霧(マークA)し、埋設物Bの埋設位置においては青色の塗料を噴霧(マークB)するように、表示部4に設定する。その後、レーダ本体2を、例えば、測定線上に沿って再度移動させると、表示部4は、埋設物の深さによってペイントの色を区別して、図10(d)に示すように、埋設位置にペイントを噴霧する。このようにして、図10(a)及び図10(b)に示すように、配管等の埋設物11が輻輳して埋設されている状況においても、埋設状況を分かり易く表示させることができる。
【0043】
上記全ての説明において、表示部4は、例えば、インクジェット式によるマーキング手段4aにより、ペイントを噴霧して埋設位置を表示する場合で説明したが、これに限らず、図11に示すように、レーザ投影器4bをレーダ本体2の移動方向後部に設置し、このレーザ投影器4bを用いて、埋設位置にレーザ光を投影することにより埋設位置を表示する構成にしてもよい。マーキング手段4aを用いた場合は、掘削作業後に、路面上等にペイントされた表示(マーク)を消去する作業が必要となるが、本構成例の場合は、レーザ光の投影を止めるだけで埋設物の表示を消去することができるため、消去作業は必要ない。また、マーキング手段4aを用いた場合は、噴霧したペイント等が雨等により消えてしまう可能性があるが、本構成例の場合は、表示はレーザ光を投影する限り消えることはない。さらに、本構成例の場合は、夜間の掘削作業においても視認性よく識別表示をすることができる。また、図示省略するが、レーザ投影器4bをレーダ本体2と別に配置する構成としてもよい。この場合、記憶部8に記憶された埋設位置データCと、予め記憶部8等に記憶させたレーザ投影器4bの位置情報とに基づいて、レーザ光の投影を制御可能とすることにより、例えば、探知測定後、レーダ本体2を埋設位置まで移動させることなく、埋設位置をレーザ光により表示することができる。
【0044】
なお、上記全ての説明において、位置測定部4は、GPSを用いた場合で説明したが、これに限らず、レーザ測位計やカメラ(車載カメラ式、天井カメラ式)を用いた構成であってもよい。図示省略するが、レーザ測位計を用いる場合は、例えば、2つの回転レーザを探知エリア外に設置して、レーダ本体2に向けてレーザ光を投光して、三角測量によりレーダ本体2の位置を測定し、その探知結果を記憶部8に出力可能な構成にしたり、また、レーダ本体2の上部に1つの回転レーザを設置し、探知エリア外に2つのポール等を設置して、ポール等に向けてレーザ光を投光して、上記同様に三角測量によりレーダ本体2の位置を測定する。また、カメラを用いた場合は、例えば、レーダ本体2にカメラを搭載(車載カメラ式)して、レーダ本体2の移動の際に地面を連続的に撮影して、撮影画像に基づいて、予め定めた基準位置からレーダ本体2がどれだけ移動したかを測定する構成にしたり、探知エリア全体を撮影可能にカメラを配置(天井カメラ式)して、レーダ本体2を撮像して、レーダ本体2の移動距離を測定する構成にしてもよい。
【0045】
また、上記全ての説明においては、探知エリア上に測定線を事前に描き、その測定線を基準にして、埋設物11の探知及び再度の移動操作を行う場合で説明したが、これに限らず、例えば、図5(d)等に示した埋設位置の推定図上に、レーダ本体2の位置を重ねて画像表示できるようにディスプレイ部10を構成することにより、測定線を描かないで探知した後に、このディスプレイ部10を見ながらレーダ本体2を埋設位置まで移動操作して、埋設位置を表示(ペイント噴霧、レーザ光投影)してもよい。また、レーダ本体2は、オペレータ等によって押されて移動される場合で説明したが、これに限らず、レーダ本体2に自走可能に駆動機構を設けてもよい、この場合、探知エリア内で、例えば、格子状に設定する測定線の位置情報等を記憶部8に記憶させ、この測定線の位置情報に基づき、自走して埋設物11を探知し、その後、記憶部8に記憶された埋設位置データCに基づき埋設位置まで再度自走して埋設位置を表示するように構成してもよい。
【符号の説明】
【0046】
1 地中レーダ
2 レーダ本体
3 位置測定部
4 表示部
5 電磁波送信部
6 電磁波受信部
8 記憶部
9 解析部
11 埋設物
17 補間部
【技術分野】
【0001】
本発明は、地中の埋設物を探知する地中レーダに関し、詳しくは、路面上等に埋設物の埋設位置を容易に表示することが可能な地中レーダに係るものである。
【背景技術】
【0002】
道路工事や鉄道軌道の改良工事等において、例えば、コンクリート等の掘削作業を伴って行うことがある。この様な掘削作業に先立って、ガス管、水道管、電力ケーブル等の既設の設備の埋設状況を調査して、作業の安全確保を図ることがある。この様な埋設状況の調査は、一般的に、調査エリアを予め定めて、オペレータ等が、地中レーダを移動操作し、その後オペレータ等が、地中レーダから得られた各種データを解析することによって行われている。
【0003】
ここで、この種の地中の埋設状況の調査に用いる地中レーダとしては、例えば、特許文献1等に記載されたものがある。特許文献1に記載された地中レーダは、地中に向けて電磁波を送出する電磁波送信部と、送出された電磁波の反射波を受信する電磁波受信部とを備えたレーダ本体を有し、電磁波受信部によって受信された電磁波に基づく受信波データ等により地中に埋設された埋設物を探知する構成である。この種の一般的な地中レーダを用いて埋設状況を調査する場合、地中レーダのオペレータ等は、例えば、調査エリア内に測定線を格子状に設定し、掘削する路面等にチョーク等でその測定線を描き、次に、レーダ本体をその測定線に沿って移動操作して、埋設物の探知を行う。そして、オペレータ等は、得られた受信波データ等を解析してその解析結果に基づいてどの測定線のどの位置に埋設物が埋っているか判断し、最後に、オペレータ等は、既に路面等に描かれている測定線を基準にして巻尺等を利用して、路面上等に埋設位置をチョーク等によりマーキングする。このようにして、掘削作業者等が埋設物の埋設位置を識別できるようにして、掘削作業の安全が確保されるようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−151603号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来、この種の地中レーダを用いて埋設状況を調査する場合、オペレータ等は、地中のどこに埋設物が埋っているかを掘削作業者等が識別できるように、巻尺等を利用して路面上等に埋設位置を表示しなければならず、埋設状況の調査作業の作業負荷が高いという問題がある。
【0006】
そこで、本発明は前述の問題点に対処し、路面上等に埋設物の埋設位置を容易に表示することが可能な地中レーダを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明による地中レーダは、地中に向けて電磁波を送出する電磁波送信部と、送出された該電磁波の反射波を受信する電磁波受信部とを備えたレーダ本体を有し、該電磁波受信部によって受信された電磁波に基づく受信波データから地中に埋設された埋設物を探知する地中レーダにおいて、予め定めた探知エリア内での前記レーダ本体の移動位置を測定する位置測定部と、前記探知エリア内で前記レーダ本体を移動させて埋設物を探知する際の前記受信波データと、この受信波データを取得した時に前記位置測定部によって得られる前記レーダ本体の位置データとに基づいて定まる埋設物の埋設位置データを記憶する記憶部と、再度、前記探知エリア内で前記レーダ本体を移動させた時に、当該移動の際に前記位置測定部によって得られるレーダ本体の位置データと、前記記憶部に既に記憶されている前記埋設位置データとに基づいて、前記探知エリア上に埋設物の埋設位置を表示する表示部と、を備えたものである。
【0008】
このような構成により、埋設物の探知エリア内でレーダ本体を移動させて埋設物を探知する際の受信波データと、この受信波データを取得した時に位置測定部によって得られるレーダ本体の位置データとに基づいて定まる埋設物の埋設位置データを記憶部は記憶する。その後、再度、探知エリア内でレーダ本体を移動させると、この移動の際に位置測定部から得られるレーダ本体の位置データと、記憶部に既に記憶されている埋設位置データとに基づいて、探知エリア上に埋設物の埋設位置を表示部によって表示する。
【発明の効果】
【0009】
本発明によれば、埋設物の探知エリア内でレーダ本体を移動させ、各位置で得られる受信波データと、この受信波データと関連付けた位置データとに基づいて定まる埋設物の埋設位置データを記憶することができ、再度、探知エリア内でレーダ本体を移動させることにより、例えば、この移動の際に位置測定部により得られるレーダ本体の位置データが、記憶部に既に記憶されている埋設位置データと略一致したことに基づいて、探知エリア上に埋設物の埋設位置を表示することができる。したがって、地中レーダのオペレータ等は、巻尺等を利用して探知エリア上で採寸して埋設位置をマーキング等する必要がないため、埋設状況の調査作業の作業負荷を低減させることができる。また、本発明の地中レーダは、探知結果を解析した後に、探知エリア上に埋設位置を表示する構成であるため、小石等と配管の区別をした上で、埋設物の埋設位置を表示することができる。したがって、掘削作業をするにあたって作業上支障のない、例えば、小石等の埋設位置については表示(ペイント噴霧、レーザ光投影等)しないようにすることができるため、無駄な識別表示を無くすことができるという利点もある。
【図面の簡単な説明】
【0010】
【図1】本発明による地中レーダの第1実施形態を示す構成図である。
【図2】上記実施形態の地中レーダを用いた埋設物の探知を説明する図で、(a)は地中レーダと埋設物の埋設状況を示す図で、(b)は電磁波受信部の受信波形である。
【図3】上記実施形態の地中レーダを用いた埋設物の探知を説明する別の図で、(a)は地中レーダと埋設物の埋設状況を示す図で、(b)は電磁波受信部の受信波形である。
【図4】上記実施形態におけるディスプレイ部が表示する探知結果の画像表示例を示す図である。
【図5】上記実施形態の地中レーダを用いて、地中の埋設状況を調査する手順を説明する図で、(a)は探知エリアの上面図であり、探知エリア上に測定線を描いた状況を示し、(b)はA−A線断面図、(c)は探知結果、(d)は埋設位置の推定図、(e)は探知エリア上に埋設位置を表示した状況を示す図である。
【図6】上記実施形態の地中レーダを用いて、地中の埋設状況を調査する手順を示す作業フロー図である。
【図7】本発明による地中レーダの第2実施形態を示す構成図である。
【図8】上記実施形態の地中レーダを用いて、地中の埋設状況を調査する手順を説明する図で、(a)は探知エリア上に埋設位置が表示された状況を示し、(b)は補間線、(c)は埋設位置を補間して埋設位置を表示する状況を示す。
【図9】本発明による地中レーダの第3実施形態を示す構成図である。
【図10】上記実施形態の地中レーダを用いて、地中の埋設状況を調査する手順を説明する別の図で、(a)は探知エリアの上面図であり、探知エリア上に測定線を描いた状況を示し、(b)はA−A線断面図、(c)は探知結果、(d)は探知エリア上に埋設位置を表示した状況を示す図である。
【図11】本発明による地中レーダの表示部の別の構成例を説明する図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態を添付図面に基づいて詳細に説明する。
図1は本発明による地中レーダの第1実施形態を示す構成図である。
図1において、本実施形態の地中レーダ1は、レーダ本体2と、位置測定部3と、表示部4とを備えて構成され、レーダ本体2は、電磁波送信部5と、電磁波受信部6と、信号処理部7と、記憶部8と、解析部9と、ディスプレイ部10とを備えて成る。
【0012】
上記レーダ本体2は、前述したように電磁波送信部5と電磁波受信部6等を備えて、電磁波送信部5によって地中に向けて電磁波を送出し、電磁波受信部6によって受信された電磁波に基づく受信波データAから、地中に埋設された埋設物11の埋設状況を探知する本体となるものである。レーダ本体2は、例えば、図1に示すように、その底部に車輪が取り付けられている。また、後述する図2(a)に示すように、レーダ本体2の上部等には取手が取り付けられており、オペレータ等によってレーダ本体2を、埋設状況の探知エリア内を容易に移動できるようになっている。
【0013】
上記埋設物11は、例えば、金属管や塩化ビニール管等であり、図2(a)に示すように、レーダ本体2の移動方向と直交する方向(図面上垂直方向)に延伸して埋設されている場合や、後述する図3(a)に示すように、移動方向と平行な方向に延伸して埋設されている場合等、様々な場合がある。
【0014】
上記電磁波送信部5は、図1に示すように、電磁波(送信波)を地中に向けて送出するものであり、電磁波を発生する電磁波発生部12と、電磁波発生部12から発生した電磁波の出力を増幅させる送信波アンプ13と、増幅された電磁波を地中に向けて送出する送信アンテナ14とを備えている。
【0015】
上記電磁波受信部6は、送出された電磁波(送信波)に基づいて反射された電磁波(受信波)を受信して、出力を増幅させるもので、図1に示すように、反射された電磁波を受信する受信アンテナ15と、受信した電磁波の出力を増幅させる受信波アンプ16とを備えている。
【0016】
上記信号処理部7は、受信波アンプ16から出力される信号を処理する一般的なものであり、図示省略するが、例えば、受信波の高調波ノイズを除去する波形処理部を備えている。信号処理部7で処理された受信波の受信波データAは、後述するように、受信波が受信された際に位置測定部3によって得られるレーダ本体2の位置データBと関連付けて記憶部8に記憶される。
【0017】
ここで、図2(a)は、例えば、配管等の埋設物11の正確な埋設位置については不明だが、埋設物11が図面垂直方向に延伸して埋設されていることについては予め分かっている場所において、レーダ本体2を埋設物11と直交する方向に移動させて、埋設物11を探知する状況を表している。また、図2(b)は、図2(a)の状況において、電磁波送信部5から電磁波を複数の位置で送出した場合に、受信アンテナ15が各位置において受信した反射波の波形を各位置における送信波の送信時刻を時間の始まりとして時間シフトさせ、各位置における受信波の波形を表示した図である。図2(b)の縦軸は電磁波を送出してから反射波が受信されるまでの遅延時間を表し、下に行くほど、遅延時間が長く、アンテナと埋設物11の距離が遠いことを示し、上に行くほど、遅延時間が短く、距離が近いことを示す。図2(b)に破線で示すように、アンテナと埋設物11の距離が徐々に近くなり、その後遠くなるような場合、距離が一番近くなったところが埋設物11の真上であることを示し、この時の探知エリアにおけるレーダ本体2の探知エリア上の平面的な位置は、後述するように位置測定部3によって測定されるため、埋設物11の真上の位置、すなわち、埋設位置が分かる。また、距離が一番近くなったところの距離は、埋設物の地表面からの埋設深さを示す。したがって、埋設物11の概略の配置方向が予め分かっている場合は、埋設物11の上を横切るようにして、レーダ本体2を移動させて探知すると、埋設物11の正確な埋設位置及び埋設深さを特定することができる。
【0018】
次に、図3(a)は、例えば、配管等の埋設物11の正確な埋設位置については不明だが、埋設物11が図面左右方向に延伸して埋設されていることについては予め分かっている場所において、レーダ本体2を埋設物11と平行する方向に移動させ、埋設物11を探知する状況を表している。図3(b)は、図3(a)の状況において、図2(b)で説明した方法で各位置における受信波を表示した図であり、破線で示すようにアンテナと埋設物11の距離が一定の関係で、埋設物11が埋設されていることを示している。しかし、埋設物11の真上を移動させたかどうかについては分からないため、正確な埋設位置及び深さを特定することはできない。したがって、埋設物11の正確な埋設位置及び深さを特定したい場合は、埋設物11を横切るように、レーダ本体2を移動させて探知することが望ましい。
【0019】
図2及び図3においては、配管等の埋設物11がどのような方向に延伸して埋設されているかが予め分かっている場所において、レーダ本体2を一方向に移動する場合を説明したが、一般的に、埋設物11がどのような方向に延伸して埋設されているかについて分かっていない場合もある。このような場合において、埋設物11の正確な埋設位置を特定したい場合は、例えば、レーダ本体2を、探知エリア内で格子状に設定された測定線上に沿って移動させることにより、いずれかの測定線上においてレーダ本体2が埋設物11を横切るようにして、埋設物11の探知を行うとよい。
【0020】
上記記憶部8は、埋設物11の探知エリア内でレーダ本体2を移動させて埋設物11を探知する際の受信波データAと、この受信波データAを取得した時に位置測定部3によって得られるレーダ本体2の位置データBとに基づいて定まる埋設物11の埋設位置データCを記憶するものである。本実施形態において、埋設位置データCは、記憶部8に記憶された受信波データAと位置データBとに基づいて、後述する解析部9によって求められたデータである。また、記憶部8は、受信波データAと位置データBとを関連付けて記憶することも可能であり、後述するディスプレイ部10は、例えば、この記憶部8に記憶された受信波データA及び位置データBに基づいて探知結果を画像表示できるように構成されている。
【0021】
上記解析部9は、探知エリア内でレーダ本体2を移動させて埋設物11を探知した時に得られた受信波データAと位置データBとに基づいて、埋設位置を求めて埋設位置データCを出力するものである。解析部9は、例えば、埋設位置データCを記憶部8に出力し、記憶部8は、解析部9によって出力されたこの埋設位置データCを記憶する。例えば、レーダ本体2を所定の測定線上に沿って一方向に移動させて埋設物11を探知した場合、解析部9は、記憶部8に記憶された受信波データAと位置データBとに基づいて、後述するディスプレイ部10と同様にして求める探知結果の波形(図4参照)データ内に、上に凸の円弧形状が含まれるかを解析し、円弧形状が含まれる場合は、円弧の頂点における位置データBを、埋設物11の埋設位置データCとして特定して記憶部8に出力し、以降、探知エリア内に設定された各測定線での探知結果に対して、上記と同様にして埋設位置データCを求めて、探知エリア全体についての完全な埋設位置データCを求める。
【0022】
上記ディスプレイ部10は、埋設物11の探知結果等を画像表示するものである。ディスプレイ部10は、例えば、レーダ本体2を一方向に移動させ、電磁波送信部5から電磁波を複数の位置で送出した場合に、受信アンテナ15が各位置において受信した電磁波の受信波データAを記憶部8から読み出し、受信波データA内の時間データを各位置における送信波の送信時刻を時間の始まりとして時間シフトさせると共に、受信強度を濃淡で表示して、さらに、各受信波データAと関連付けて記憶部8に記憶された位置データBに基づいて位置シフト(レーダ本体2の移動方向へのシフト)させて、各位置における埋設物11の探知結果を画像表示する。ここで、図4は、図2(a)と同様に、埋設物11を横切るように、レーダ本体2を移動させた場合に、ディスプレイ部10が表示する探知結果の画像表示例を示す図である。なお、図4においては、図の簡略化のため、各位置において受信強度の一番高い箇所のみ表示し、他の箇所については省略して示している。また、このディスプレイ部10は、解析部9によって求められた埋設位置データCに基づいて、後述する図5(d)に示す埋設位置の推定図を表示することもできる。
【0023】
上記位置測定部3は、予め定めた探知エリア内での前記レーダ本体2の移動位置を測定するものである。本実施形態において、位置測定部3は、GPS(Global Positioning System:全地球測位システム)を用いてレーダ本体2の移動位置を測定するように構成されており、図1に示すように、例えば、レーダ本体2の上面に設けられている。この位置測定部3によって得られるレーダ本体2の位置データBは、前述したように、その位置で受信した受信波の受信波データAと関連付けられて記憶部8に記憶される。
【0024】
上記表示部4は、埋設物11の探知エリア内でレーダ本体2を移動させて埋設物を探知した後、再度探知エリア内でレーダ本体2を移動させた時に、この移動の際に位置測定部3によって得られるレーダ本体2の位置データBと、記憶部8に既に記憶されている埋設位置データCとに基づいて、探知エリア上に埋設物の埋設位置を表示するものである。
【0025】
本実施形態において、表示部4は、埋設位置にペイントを噴霧することにより埋設位置を表示するものであり、例えば、インクジェット式によるマーキング手段4aを備えている。本実施形態においては、埋設物を探知した後、再度探知エリア内でレーダ本体2を移動させると、表示部4は、例えば、この移動の際に位置測定部3により得られるレーダ本体2の位置データBが、記憶部8に既に記憶されている埋設位置データCと略一致したことに基づいて、探知エリア上の埋設位置にペイントを噴霧する。なお、表示部4は、図1等に示すように、位置測定部3と異なる位置に取り付けられているが、この位置の差異を考慮してペイントの噴霧タイミングを制御しており、このように制御することにより、埋設位置にペイントを噴霧可能に構成されている。
【0026】
次に、このように構成された地中レーダ1を用いて、埋設物11の埋設状況を調査する作業の流れ及び地中レーダ1の動作を、図5(a)及び図5(b)に示すように、2本の配管が平行に埋設されている探知エリア内を調査する場合を例として、図5及び図6を参照して説明する。なお、下記の説明においては、調査前に埋設物11がどのような方向に延伸して埋設されているかについて分かっていないものとし、前述したように、レーダ本体2を、探知エリア内で格子状に設定された測定線上に沿って移動させて探知する場合で説明する。
【0027】
まず、オペレータ等は、図5(a)に示すように、探知エリア全体を網羅するように、格子状に測定線(B1〜B9,C1〜C9)を設定し、その測定線を探知エリアの地表面等にチョーク等で描画する(STEP1)。
【0028】
そして、オペレータ等は、例えば、測定線B1の一端(図5(a)の下側)から測定線B1に沿ってレーダ本体2を移動できるように配置し、地中レーダ1の電源を入れる。測定準備ができたら、オペレータ等は、例えば、測定開始スイッチ等を押すと共に、測定線B1に沿ってレーダ本体2を一方向(図5(a)の矢印B方向)に押して、測定線B1の他端(図5(a)の上側)まで移動させる。この移動の際、電磁波発生部12は、電磁波を複数の位置で発生し、送信波アンプ13は、電磁波発生部12から発生した電磁波の出力を増幅させ、送信アンテナ14は、増幅された電磁波を複数の位置で地中に向けて送出する。そして、送信アンテナ14から一波目の電磁波が送出されると、受信アンテナ15は、送信アンテナ14から送出された電磁波(送信波)に基づいて反射された一波目の電磁波(受信波)を受信し、受信波アンプ16は、受信アンテナ15が受信した電磁波の出力を増幅させ、信号処理部7へ一波目の受信波の信号を出力する。信号処理部7は、例えば、受信波の信号内の高調波ノイズを除去し、ノイズ除去後の受信波の信号を一波目の受信波データAとして、記憶部8へ出力する。この受信波データAは、受信された際に位置測定部3によって得られるレーダ本体2の位置データBと共に記憶される。そして、レーダ本体2の測定線B1の他端までの移動の際に送出される2波目以降の電磁波は、上記と同様にして電磁波受信部6において受信されて、各位置における受信波データAと位置データBが記憶部8に記憶される。レーダ本体2が測定線B1の他端に到達すると、オペレータ等は、例えば、測定中断スイッチ等を押し、次の測定線の一端、例えば、測定線B2の一端(図5(a)の下側)から測定線B2に沿ってレーダ本体2を移動できるように配置し、測定線B1上での測定と同様にして測定する。以降、同様にして、各測定線(B3〜B9,C1〜C9)上の測定を行う。なお、図5(a)に示すように、測定線(B4〜B6、C2及びC3)上に、植栽等の障害物が有る場合は、例えば、測定線の一端から測定を行い、障害物があるエリアでは測定を中断し、レーダ本体2を回避させて、その測定線上に再び移動させ、残りの測定を行うようにする(STEP2)。
【0029】
次に、解析部9は、ディスプレイ部10と同様にして探知結果の波形データを求め、この波形データ内に、上に凸の円弧形状が含まれるかを解析し、円弧形状が含まれる場合は、円弧の頂点における位置データBを、埋設物11の埋設位置データCとして特定して記憶部8に出力し、以降、探知エリア内に設定された各測定線での探知結果に対して、上記と同様にして埋設位置データCを求めて、探知エリア全体についての完全な埋設位置データCを求める。図5(c)は、解析部9が求めた測定線B1,B5,B9上での探知結果の波形例を示す図である。図5(c)の測定線B5上での探知結果の波形例には、円弧が一つしか示されていないが、これは測定線B5上には植栽が存在するため地中レーダのB方向の移動が制約されているからである。なお、図5(c)においては、図の簡略化のため、各位置において受信強度の一番高い箇所のみ表示し、他の箇所については省略して示している。また、解析部9は、図5(d)の×印で示すように、埋設物11の連続性が推定される場合は、埋設物11は配管等の延伸したものであると判定し、また、図示省略するが、連続性のない埋設位置データCが出力された場合は、その埋設位置データCに対応した位置に埋設されている埋設物11は、例えば、地中に埋っている小石等であると判定する。このように探知結果を解析して、埋設物11の埋設位置の特定を行う。なお、解析部9によって求められた埋設位置データCに基づいて、図5(d)に示すように、埋設位置に×印を示した埋設位置の推定図をディスプレイ部10に画面表示してもよい。(STEP3)。
【0030】
そして、上記のように探知結果の解析(埋設位置の特定)が完了すると、オペレータ等は、例えば、探知エリア上に描画されている測定線上に沿ってレーダ本体2を再度移動させる。オペレータ等が、レーダ本体2を移動させると、表示部4は、例えば、この移動の際に位置測定部3により得られるレーダ本体2の位置データBが、記憶部8に既に記憶されている埋設位置データCと略一致した時、位置測定部3と表示部4との位置の差異を考慮したタイミングで、例えば、赤色のペイントを噴霧して、楕円状のマークを埋設位置に表示する。なお、表示部4は、解析部9によって埋設物11が小石等、すなわち、掘削作業をするにあたって作業上支障のないものであると判定された場合は、ペイントを噴霧しないように制御する(STEP4)。最後に、掘削作業者は、路面等に表示されたマークに基づいて埋設物11の埋設位置を確認し、埋設物11を破損等しないようにして、掘削作業を行う(STEP5)。
【0031】
このような構成により、本実施形態における地中レーダ1によれば、探知エリア内でレーダ本体2を移動させ、各位置で得られる受信波データAと、この受信波データAと関連付けた位置データBとに基づいて、解析部9によって求めた埋設位置データCを記憶することができ、この特定された埋設位置データCと位置データBとに基づき埋設物11の埋設位置を表示することができ、再度、探知エリア内でレーダ本体2を移動させることにより、例えば、この移動の際に位置測定部4により得られるレーダ本体2の位置データBが、記憶部8に既に記憶されている埋設位置データCと略一致したことに基づいて、探知エリア上に埋設物11の埋設位置を表示することができる。したがって、地中レーダ1のオペレータ等は、巻尺等を利用して採寸してマーキング等する必要がないため、埋設状況の調査作業の作業負荷を低減させることができる。また、本発明の地中レーダは、埋設物11の探知結果を解析した後に、探知エリア上に埋設位置を表示する構成であるため、例えば、小石等と配管の区別をした上で、埋設物11の埋設位置を表示することができる。したがって、掘削作業をするにあたって作業上支障のない、例えば、小石等の埋設位置については表示(ペイント噴霧、レーザ光投影等)しないようにすることができるため、無駄な識別表示を無くすことができる。
【0032】
図7は、本発明による地中レーダの第2実施形態を示す構成図である。尚、図1と同一の要素には同一の符号を示して説明を省略し、異なる部分についてのみ以下に説明する。
【0033】
本実施形態において、地中レーダ1は、前述した埋設位置データC間を補間する補間位置データDを求める補間部17を備え、表示部4は、この補間位置データDと埋設位置データCとに基づき、探知エリア上に埋設位置を表示するように構成されている。具体的には、補間部17は、例えば、解析部9から得られる埋設位置データCに基づいて補間位置データDを求め、この補間位置データDを解析部9へ出力し、解析部9は、埋設位置データCと補間位置データDを記憶部8に出力して記憶させるように構成されている。
【0034】
図8は、本実施形態の地中レーダ1を用いて、地中の埋設状況を調査する手順を説明する図である。なお、図8(a)は、例えば、測定線に対して埋設物が斜めに交差する方向に延伸して埋設されている探知エリアにおいて、図5及び図6で説明した方法と同様にして、解析部9が求めた埋設位置データCのみによって探知エリア上に埋設位置を表示した状況を示している。
【0035】
ここで、表示部4が、図8(a)に示すように、測定線上に埋設位置を表示するのみでは、埋設状況等が分かり難い場合がある。本実施形態において、解析部9は、例えば、埋設位置(図8(b)の×印)の埋設位置データC間を補間する補間位置データDと埋設位置データCとに基づき、延伸して埋設されている埋設物11の探知エリア内での埋設位置全体を示す補間線を求め、表示部4は、この補間線の情報に基づき探知エリア上に埋設位置を表示可能に構成する。例えば、第1実施形態と同様にして、図8(a)に示すように、測定線上に埋設位置を表示し、その後、本実施形態においては、オペレータ等が、図8(c)に示すように、既に表示されたマークの間をレーダ本体2が通過するように移動操作すると、表示部4は、探知エリアにおいて仮想の補間線をレーダ本体2が横切った時に、位置測定部3と表示部4との位置の差異を考慮したタイミングで、ペイントを噴霧して、既に表示されたマークの間に、補間位置データDに基づく埋設位置を表示することができる。このようにして、埋設位置を表示することにより、埋設位置の表示箇所の間隔が密になり、埋設状況等がより分かり易くなる。なお、上記説明においては、埋設物11の埋設位置の表示は、図8(a)及び図8(b)に示すように、2回に分けて行う場合で説明したが、2回に分けずに1回で行ってもよい。この場合、例えば、探知エリア内で格子状に設定された測定線に沿ってレーダ本体2を移動して埋設物11の埋設位置を探知した後、オペレータ等は、図8(b)に示すようにディスプレイ部10に表示された前述の補間線と、路面等に描画された測定線との位置関係を参考にして、レーダ本体2が測定線上付近及びその測定線の中間において、仮想の補間線を横切るようにレーダ本体2を移動操作することにより、1回の移動操作によって、図8(c)に示すような表示箇所の間隔が密な埋設位置の表示を行うことができる。
【0036】
図9は、本発明に係る地中レーダの第3実施形態を示す構成図である。尚、図1に示した第1実施形態と同一の要素には同一の符号を示して説明を省略し、異なる部分についてのみ以下に説明する。
【0037】
本実施形態において、レーダ本体2は、上記第1実施形態で説明した解析部9を備えていない。本実施形態において、受信波データAと位置データBとに基づいて定まる埋設物11の埋設位置データCは、第1実施形態と異なり、オペレータ等によって定められる。本実施形態におけるディスプレイ部10は、第1実施形態と同様にして、探知結果を画像表示することができ、オペレータ等は、この画像表示された探知結果を解析し、探知エリアにおける埋設物11の埋設位置を特定して、埋設位置データCを求める。ディスプレイ部10は、オペレータ等によって特定された埋設位置の埋設位置データCが、例えば、タッチパネル上からオペレータ等によって入力可能に構成されている。そして、記憶部8は、オペレータ等によって入力された埋設位置データCを記憶できるように構成されている。
【0038】
なお、本実施形態の地中レーダ1を用いて、埋設物11の埋設状況を調査する作業の流れは、オペレータ等が自ら探知結果を解析し、埋設位置データCを入力すること以外については、第1実施形態と同じであるため説明を省略し、また、地中レーダ1の動作は、オペレータ等によって入力された埋設位置データCに基づきマーキングすること以外については、第1実施形態と同じであるため説明を省略する。
【0039】
このような構成によって、本実施形態における地中レーダ1によれば、オペレータ等によって入力された埋設位置データCを記憶することができ、第1実施形態と同様に、探知測定後に、再度レーダ本体2を移動させて、埋設位置データCと位置データBに基づいて探知エリア上に埋設位置を表示することができため、埋設状況の調査作業の作業負荷を低減させることができる。
【0040】
なお、本実施形態においても、第2実施形態において説明したように、補間位置データDと埋設位置データCとに基づいて埋設位置を表示する構成してもよい。この場合、オペレータ等は、例えば、埋設位置データCと補間位置データDを求めて、ディスプレイ部10等を介して、この埋設位置データCと補間位置データDを入力する。これにより、本実施形態においても、第2実施形態と同様に、埋設位置の表示箇所の間隔が密になり、埋設状況等がより分かり易くなる。
【0041】
上記の全ての説明において、埋設物11の埋設位置の表示は、例えば、赤色のペイントを噴霧して行うものとして説明したが、埋設位置の表示はこれに限らず、例えば、配管等の埋設物11の深さや、その概略の太さ及び形状、材質の違いによって、噴霧するペイントの色やパターンを区別して表示してもよい。埋設物11の深さは、電磁波を送出してから反射波が受信されるまでの遅延時間によって測定することができ、埋設物の概略の太さ及び形状は、受信波の形状をオペレータが解析する、または解析部9によって解析して区別することができ、埋設物の材質(金属、樹脂等)については、受信強度をオペレータが解析する、または解析部9によって解析して区別することができる。また、特定の深さ、太さ、形状、材質の埋設物の埋設位置のみを表示するようにしてもよい。
【0042】
上記のように、探知結果の解析に基づいて噴霧するペイントの色等を区別して表示する一例として、埋設物の深さによってペイントの色を区別する例を以下に説明する。図10(a)及び図10(b)に示すように、例えば、探知エリアにおいて、埋設物A(細い配管)より深い位置に埋設物B(太い配管)が埋設物Aと交差して地中に埋設されている状況において、第1実施形態と同様にして、探知エリア内を探知すると、ディスプレイ部10は、例えば、測定線B1,B4,B6,B9上の探知結果を、図10(c)に示すように画像表示する。この探知結果より、解析部9又はオペレータ等は、各位置において埋設物Aは埋設物Bより浅いところに埋設されているということを解析結果として得る。そして、例えば、埋設物Aの埋設位置においては赤色のペイントを噴霧(マークA)し、埋設物Bの埋設位置においては青色の塗料を噴霧(マークB)するように、表示部4に設定する。その後、レーダ本体2を、例えば、測定線上に沿って再度移動させると、表示部4は、埋設物の深さによってペイントの色を区別して、図10(d)に示すように、埋設位置にペイントを噴霧する。このようにして、図10(a)及び図10(b)に示すように、配管等の埋設物11が輻輳して埋設されている状況においても、埋設状況を分かり易く表示させることができる。
【0043】
上記全ての説明において、表示部4は、例えば、インクジェット式によるマーキング手段4aにより、ペイントを噴霧して埋設位置を表示する場合で説明したが、これに限らず、図11に示すように、レーザ投影器4bをレーダ本体2の移動方向後部に設置し、このレーザ投影器4bを用いて、埋設位置にレーザ光を投影することにより埋設位置を表示する構成にしてもよい。マーキング手段4aを用いた場合は、掘削作業後に、路面上等にペイントされた表示(マーク)を消去する作業が必要となるが、本構成例の場合は、レーザ光の投影を止めるだけで埋設物の表示を消去することができるため、消去作業は必要ない。また、マーキング手段4aを用いた場合は、噴霧したペイント等が雨等により消えてしまう可能性があるが、本構成例の場合は、表示はレーザ光を投影する限り消えることはない。さらに、本構成例の場合は、夜間の掘削作業においても視認性よく識別表示をすることができる。また、図示省略するが、レーザ投影器4bをレーダ本体2と別に配置する構成としてもよい。この場合、記憶部8に記憶された埋設位置データCと、予め記憶部8等に記憶させたレーザ投影器4bの位置情報とに基づいて、レーザ光の投影を制御可能とすることにより、例えば、探知測定後、レーダ本体2を埋設位置まで移動させることなく、埋設位置をレーザ光により表示することができる。
【0044】
なお、上記全ての説明において、位置測定部4は、GPSを用いた場合で説明したが、これに限らず、レーザ測位計やカメラ(車載カメラ式、天井カメラ式)を用いた構成であってもよい。図示省略するが、レーザ測位計を用いる場合は、例えば、2つの回転レーザを探知エリア外に設置して、レーダ本体2に向けてレーザ光を投光して、三角測量によりレーダ本体2の位置を測定し、その探知結果を記憶部8に出力可能な構成にしたり、また、レーダ本体2の上部に1つの回転レーザを設置し、探知エリア外に2つのポール等を設置して、ポール等に向けてレーザ光を投光して、上記同様に三角測量によりレーダ本体2の位置を測定する。また、カメラを用いた場合は、例えば、レーダ本体2にカメラを搭載(車載カメラ式)して、レーダ本体2の移動の際に地面を連続的に撮影して、撮影画像に基づいて、予め定めた基準位置からレーダ本体2がどれだけ移動したかを測定する構成にしたり、探知エリア全体を撮影可能にカメラを配置(天井カメラ式)して、レーダ本体2を撮像して、レーダ本体2の移動距離を測定する構成にしてもよい。
【0045】
また、上記全ての説明においては、探知エリア上に測定線を事前に描き、その測定線を基準にして、埋設物11の探知及び再度の移動操作を行う場合で説明したが、これに限らず、例えば、図5(d)等に示した埋設位置の推定図上に、レーダ本体2の位置を重ねて画像表示できるようにディスプレイ部10を構成することにより、測定線を描かないで探知した後に、このディスプレイ部10を見ながらレーダ本体2を埋設位置まで移動操作して、埋設位置を表示(ペイント噴霧、レーザ光投影)してもよい。また、レーダ本体2は、オペレータ等によって押されて移動される場合で説明したが、これに限らず、レーダ本体2に自走可能に駆動機構を設けてもよい、この場合、探知エリア内で、例えば、格子状に設定する測定線の位置情報等を記憶部8に記憶させ、この測定線の位置情報に基づき、自走して埋設物11を探知し、その後、記憶部8に記憶された埋設位置データCに基づき埋設位置まで再度自走して埋設位置を表示するように構成してもよい。
【符号の説明】
【0046】
1 地中レーダ
2 レーダ本体
3 位置測定部
4 表示部
5 電磁波送信部
6 電磁波受信部
8 記憶部
9 解析部
11 埋設物
17 補間部
【特許請求の範囲】
【請求項1】
地中に向けて電磁波を送出する電磁波送信部と、送出された該電磁波の反射波を受信する電磁波受信部とを備えたレーダ本体を有し、該電磁波受信部によって受信された電磁波に基づく受信波データから地中に埋設された埋設物を探知する地中レーダにおいて、
予め定めた探知エリア内での前記レーダ本体の移動位置を測定する位置測定部と、
前記探知エリア内で前記レーダ本体を移動させて埋設物を探知する際の前記受信波データと、この受信波データを取得した時に前記位置測定部によって得られる前記レーダ本体の位置データとに基づいて定まる埋設物の埋設位置データを記憶する記憶部と、
再度、前記探知エリア内で前記レーダ本体を移動させた時に、当該移動の際に前記位置測定部によって得られるレーダ本体の位置データと、前記記憶部に既に記憶されている前記埋設位置データとに基づいて、前記探知エリア上に埋設物の埋設位置を表示する表示部と、
を備えたことを特徴とする地中レーダ。
【請求項2】
前記探知エリア内で前記レーダ本体を移動させて埋設物を探知した時に得られた前記受信波データと前記位置データとに基づいて、前記埋設位置を求めて埋設位置データを出力する解析部を備え、前記記憶部は、前記解析部によって出力された前記埋設位置データを記憶することを特徴とする請求項1に記載の地中レーダ。
【請求項3】
前記埋設位置データ間を補間する補間位置データを求める補間部を備え、前記表示部は、前記埋設位置データと前記補間位置データとに基づき、前記探知エリア上に埋設位置を表示することを特徴とする請求項1又は2に記載の地中レーダ。
【請求項4】
前記表示部は、前記埋設位置にペイントを噴霧することにより前記埋設位置を表示することを特徴とする請求項1〜3のいずれか一つに記載の地中レーダ。
【請求項5】
前記表示部は、前記埋設位置にレーザ光を投影することにより前記埋設位置を表示することを特徴とする請求項1〜3のいずれか一つに記載の地中レーダ。
【請求項6】
前記位置測定部は、GPSを用いて前記レーダ本体の移動位置を測定することを特徴とする請求項1〜5のいずれか一つに記載の地中レーダ。
【請求項7】
前記位置測定部は、レーザ測位計を用いて前記レーダ本体の移動位置を測定することを特徴とする請求項1〜5のいずれか一つに記載の地中レーダ。
【請求項1】
地中に向けて電磁波を送出する電磁波送信部と、送出された該電磁波の反射波を受信する電磁波受信部とを備えたレーダ本体を有し、該電磁波受信部によって受信された電磁波に基づく受信波データから地中に埋設された埋設物を探知する地中レーダにおいて、
予め定めた探知エリア内での前記レーダ本体の移動位置を測定する位置測定部と、
前記探知エリア内で前記レーダ本体を移動させて埋設物を探知する際の前記受信波データと、この受信波データを取得した時に前記位置測定部によって得られる前記レーダ本体の位置データとに基づいて定まる埋設物の埋設位置データを記憶する記憶部と、
再度、前記探知エリア内で前記レーダ本体を移動させた時に、当該移動の際に前記位置測定部によって得られるレーダ本体の位置データと、前記記憶部に既に記憶されている前記埋設位置データとに基づいて、前記探知エリア上に埋設物の埋設位置を表示する表示部と、
を備えたことを特徴とする地中レーダ。
【請求項2】
前記探知エリア内で前記レーダ本体を移動させて埋設物を探知した時に得られた前記受信波データと前記位置データとに基づいて、前記埋設位置を求めて埋設位置データを出力する解析部を備え、前記記憶部は、前記解析部によって出力された前記埋設位置データを記憶することを特徴とする請求項1に記載の地中レーダ。
【請求項3】
前記埋設位置データ間を補間する補間位置データを求める補間部を備え、前記表示部は、前記埋設位置データと前記補間位置データとに基づき、前記探知エリア上に埋設位置を表示することを特徴とする請求項1又は2に記載の地中レーダ。
【請求項4】
前記表示部は、前記埋設位置にペイントを噴霧することにより前記埋設位置を表示することを特徴とする請求項1〜3のいずれか一つに記載の地中レーダ。
【請求項5】
前記表示部は、前記埋設位置にレーザ光を投影することにより前記埋設位置を表示することを特徴とする請求項1〜3のいずれか一つに記載の地中レーダ。
【請求項6】
前記位置測定部は、GPSを用いて前記レーダ本体の移動位置を測定することを特徴とする請求項1〜5のいずれか一つに記載の地中レーダ。
【請求項7】
前記位置測定部は、レーザ測位計を用いて前記レーダ本体の移動位置を測定することを特徴とする請求項1〜5のいずれか一つに記載の地中レーダ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−103212(P2012−103212A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2010−254190(P2010−254190)
【出願日】平成22年11月12日(2010.11.12)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成22年11月12日(2010.11.12)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
[ Back to top ]