
地中位置検知方法
【課題】簡易な構造で、地上障害物に影響されることなく、掘削装置の地中位置を容易に検知することができる地中位置検知方法を提供する。
【解決手段】掘削装置1の地中位置を検知する地中位置検知方法において、掘削装置1に磁石2を設け、この磁石2を、掘削装置1の軸方向に伸びるy軸と直交するx軸およびz軸を含む平面上で回転させることで回転磁場を発生させ、少なくとも三つの測点P1,P2,P3で磁石2が発生させる回転磁場の磁束密度のx軸成分およびz軸成分をそれぞれ時刻暦として測定し、x軸成分およびz軸成分より各測点P1,P2,P3間の位相差をそれぞれ算出し、得られた位相差を、各測点を前記原点を含むxz平面にそれぞれ投影した各投影点から磁石2の位置を見込む見込み角度とみなし、この見込み角度より磁石2の位置のx座標およびz座標を算出し、他方、掘削装置1の掘削距離より磁石2の位置のy座標を算出する。
【解決手段】掘削装置1の地中位置を検知する地中位置検知方法において、掘削装置1に磁石2を設け、この磁石2を、掘削装置1の軸方向に伸びるy軸と直交するx軸およびz軸を含む平面上で回転させることで回転磁場を発生させ、少なくとも三つの測点P1,P2,P3で磁石2が発生させる回転磁場の磁束密度のx軸成分およびz軸成分をそれぞれ時刻暦として測定し、x軸成分およびz軸成分より各測点P1,P2,P3間の位相差をそれぞれ算出し、得られた位相差を、各測点を前記原点を含むxz平面にそれぞれ投影した各投影点から磁石2の位置を見込む見込み角度とみなし、この見込み角度より磁石2の位置のx座標およびz座標を算出し、他方、掘削装置1の掘削距離より磁石2の位置のy座標を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ボーリングやシールドトンネルなどの掘削装置の地中位置を検知する地中位置検知方法に関する。
【背景技術】
【0002】
ボーリングやシールドトンネルなどの掘削装置の地中位置を検知する方法としては、従来、(1)ジャイロスコープを用いる方法と、(2)地磁気方位センサーおよび傾斜計を用いる方法と、(3)電磁誘導を利用した方法と、(4)弾性波を利用した方法などがあった。
【0003】
(1)のジャイロスコープを用いた方法は、ボーリングやシールドトンネルの坑内にジャイロスコープを出し入れして掘削孔の三次元的な曲がりを計測することにより、ボーリングやシールドトンネルの先端等の位置を検知するようになっている。
【0004】
(2)の地磁気方位センサーおよび傾斜計を用いる方法は、ボーリングやシールドトンネルの坑内に地磁気方位センサーおよび傾斜計をボーリングやシールドトンネル先端に設置してその位置を計測することにより、ボーリングやシールドトンネルの先端等の位置を検知するようになっている。
【0005】
(3)の電磁誘導を利用した方法は、ボーリングやシールドトンネルの先端に設置したコイルに電流を流して磁界を発生させ、その磁界の強度を地上で測定して、ボーリングやシールドトンネルの先端の位置を検知するようになっている。
【0006】
(4)の弾性波を利用した方法は、ボーリングやシールドトンネルの先端から弾性波を発生させ、地上あるいは地中で弾性波の到達時間を測定して、ボーリングやシールドトンネルの先端の位置を検知するようになっている。
【0007】
また、その他の位置検知方法としては、特許文献1および特許文献2に示すようなものもあった。特許文献1の位置検出装置は、相対向させて発進させた2台の地中掘削機の相対位置を検出するための装置であって、一方の地中掘削機の前部に磁界発生器が設けられ、他方の地中掘削機磁界検出器が設けられている。そして、磁界発生器から発生される磁界のピーク発生時間差に基づいて、磁界発生器から見た磁界検出器間の角度を求め、各地中掘削機間の相対位置を求めるようになっている。特許文献2の位置検出装置は、地下掘削体に磁力発生源が内蔵され、測定点に磁力発生源が発生する磁界の直交する3方向成分を検出可能な一の検出手段が設けられている。そして、三次元座標の原点に測定点を置き、y軸上に磁界発生源を任意の姿勢に置いた状態を想定して、所定の計算式を用いて、磁力発生源の位置を算出するようになっている。
【特許文献1】特開平3−257321号公報
【特許文献2】特開2006−10628号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、(1)のジャイロスコープを用いた方法では、坑内に装置を出し入れするため、位置検知を行うために掘削作業を一時中断する必要があり、作業効率が低下してしまうといった問題があった。また、(2)の地磁気方位センサーおよび傾斜計を用いる方法では、地磁気方位センサーおよび傾斜計等の精密機械をボーリングやシールドトンネル先端に設置し、計測データを有線あるいは無線にて外部に伝送するようになっているので、構造が複雑になる問題があるとともに、地磁気方位センサーの近くに鉄類があるとその測定結果に誤差を生じてしまうといった問題もあった。さらに(3)の電磁誘導を利用した方法では、コイルの真上で測定をする必要があるため、既設構造物の下方での測定は困難であるといった問題があった。また、(4)の弾性波を利用した方法では、坑内に弾性波発生のための装置が必要であるため、構造が複雑になる問題があるとともに、地層の弾性波速度が均質でない場合は、測定結果に大きな誤差を生じてしまうといった問題もあった。
【0009】
そこで、本発明は前記の問題を解決すべく案出されたものであって、位置検知のための装置を簡易な構造にすることができ、地上障害物に影響されることなく、ボーリングやシールドトンネルの地中位置を容易に検知することができる地中位置検知方法を提供することを課題とする。
【課題を解決するための手段】
【0010】
前記課題を解決するため、請求項1に係る発明は、掘削装置の地中位置を検知する地中位置検知方法において、前記掘削装置に磁石を設け、この磁石を、前記掘削装置の軸方向に伸びるy軸と直交するx軸およびz軸を含む平面上で回転させることで回転磁場を発生させ、少なくとも三つの測点で前記磁石が発生させる回転磁場の磁束密度のx軸成分およびz軸成分をそれぞれ時刻暦データとして測定し、前記x軸成分およびz軸成分より前記各測点間の位相差をそれぞれ算出し、得られた位相差を、原点を含むxz平面に前記各測点をそれぞれ投影した各投影点から前記磁石の位置を見込む見込み角度とみなし、前記見込み角度より前記磁石の位置のx座標およびz座標を算出し、他方、前記掘削装置の掘削距離より前記磁石の位置のy座標を算出することを特徴とする地中位置検知方法である。
【0011】
このような方法によれば、掘削装置内には磁石を取り付けておくだけでよいので、掘削機内には電源や精密機器を設置する必要がなく、位置検知のための装置は簡易な構造となる。また、回転磁場の測定は、地上や地中において、磁石からの磁場を測定するだけでよいので、測定場所の制限を受けず、地上障害物に影響されることはない。さらに、その測定データに基づいて位置を算出することで地中位置を容易に検知することができる。
【0012】
請求項2に係る発明は、掘削装置の地中位置を検知する地中位置検知方法において、前記掘削装置に磁石を設け、この磁石を、前記掘削装置の軸方向に伸びるy軸と直交するx軸およびz軸を含む平面上で回転させることで回転磁場を発生させ、少なくとも三つの測点で前記磁石が発生させる回転磁場の磁束密度のx軸成分およびz軸成分をそれぞれ時刻暦データとして測定し、前記x軸成分およびz軸成分より前記各測点間の位相差をそれぞれ算出し、得られた位相差を、原点を含むxz平面に前記各測点をそれぞれ投影した各投影点から前記磁石の位置を見込む見込み角度とみなし、前記見込み角度より前記磁石の位置のx座標およびz座標を算出し、他方、前記掘削装置に磁石を設け、この磁石を、前記y軸およびz軸を含む平面上、またはx軸およびy軸を含む平面上で回転させることで回転磁場を発生させ、少なくとも三つの測点で前記磁石が発生させる回転磁場の磁束密度のy軸成分およびz軸成分、またはx軸成分およびy軸成分をそれぞれ時刻暦データとして測定し、前記y軸成分およびz軸成分、または前記x軸成分およびy軸成分より前記各測点間の位相差をそれぞれ算出し、得られた位相差を、前記原点を含むyz平面またはxy平面に前記各測点をそれぞれ投影した各投影点から前記磁石の位置を見込む見込み角度とみなし、前記見込み角度より前記磁石の位置のy座標およびz座標、またはx座標およびy座標を算出することを特徴とする地中位置検知方法である。
【0013】
請求項1の方法が掘削装置の掘削距離よりy座標を算出するのに対して、請求項2の方法は、x座標とz座標と同様にy座標も回転磁場の磁束密度から算出するようにしたものである。このような方法によれば、請求項1の発明と同様に、位置検知に必要な装置は簡易な構造となる。また、回転磁場の測定は、測定場所の制限を受けず、地上障害物に影響されることはない。さらに、その測定データに基づいて位置を算出することで地中位置を容易に検知することができる。
【発明の効果】
【0014】
本発明によれば、位置検知のための装置を簡易な構造にすることができ、地上障害物に影響されることなく、ボーリングやシールドトンネルの地中位置を容易に検知することができるといった優れた効果を発揮する。
【発明を実施するための最良の形態】
【0015】
次に、本発明を実施するための最良の形態について、添付図面を参照しながら詳細に説明する。
【0016】
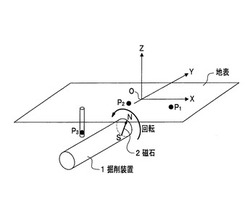
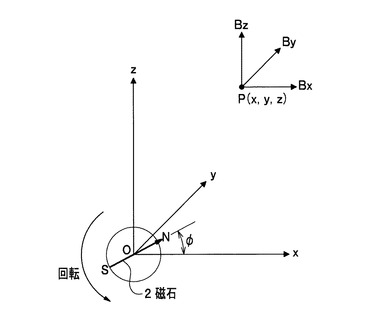
図1に示すように、磁石2の回転中心を原点Oとして、磁石2がy軸と直交するx軸およびz軸を含む平面上で回転する場合、磁石2のN極の向きのx軸からの回転角をφとすると、ある点P(x,y,z)における回転磁場の磁束密度の3方向成分(Bx,By,Bz)は、下記の式1、式2および式3で表される。
【数1】

【数2】
【数3】
【0017】
なお、式1〜式3中、rは点Pの原点Oからの距離を示し、mは磁石2の磁気モーメントを示している。
【0018】
次に、下記の式4に示す関数式F1を計算すると、図2の(a)に示すような、正弦波に表される。
【数4】
【0019】
ここで、図2の(b)に示すように、点Pを、原点Oを含むxz平面に投影した投影点P’(x,0,z)について、直線OP’のx軸からの角度をθとすると、F1が最大値となるときの磁石2の回転角φmと角度θとは、以下の式5のような関係が成立する。
【数5】
【0020】
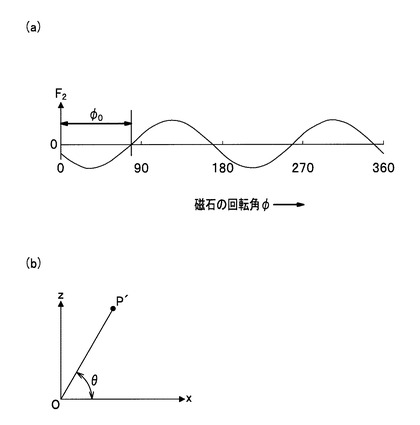
また、下記の式6に示す関数式F2を計算すると、図3の(a)に示すような、正弦波に表される。
【数6】
【0021】
ここで、図3の(b)に示すように、点Pを、原点Oを含むxz平面に投影した投影点P’(x,0,z)について、直線OP’のx軸からの角度をθとすると、F2がマイナス側からプラス側へ変化するときのF2=0の時点の磁石2の回転角φ0と角度θとは、下記の式7のような関係が成立する。
【数7】
【0022】
すなわち、回転角φmおよびφ0は、直線OP’とx軸とが成す角θに、π(=180°)のn倍を加えたものに等しくなる。この性質を利用することで、地上あるいは地中で、時刻歴データとして測定した回転磁場の磁束密度のx成分Bxとz成分Bzから、以下に説明するようにして、測点Pに対する磁石2のx座標とz座標を求める。
【0023】
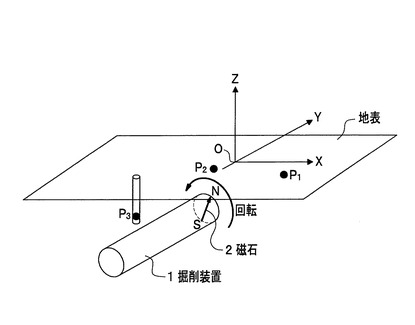
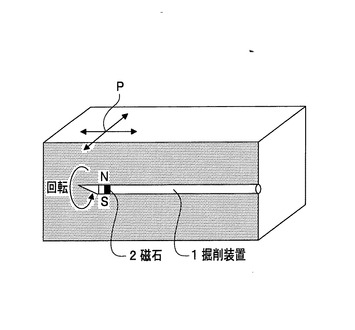
図4に示すように、本実施の形態に係る地中位置検知方法では、水平ボーリングやシールドトンネルなどの掘削装置1に磁石2が設けられている。磁石2には、永久磁石が用いられている。磁石2は、掘削装置1の回転軸などの回転部位に、磁石2のNS方向が掘削装置1の軸方向に直交するように取り付けられている。ここで、掘削装置1の軸方向をy軸にとり、このy軸に直交する水平方向をx軸にとり、y軸に直交する鉛直方向をz軸にとる。これによって、掘削装置1が作動して回転部位が回転すると、掘削装置1の軸方向に伸びるy軸と直交するx軸およびz軸を含む平面上で磁石2が回転することとなる。このように磁石2が回転することによって、回転磁場が発生する。
【0024】
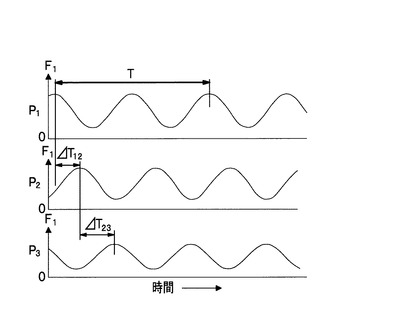
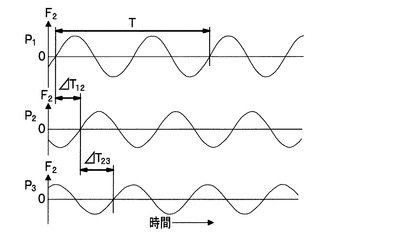
そして、地上の二つの測点P1,P2と地中の測点P3の三箇所において、回転磁場の磁束密度のx成分Bxとz成分Bzとをそれぞれ時刻暦データとして測定する。なお、各測点P1,P2,P3には、3軸コイルやフラックスゲート磁力計などの計測装置が設けられており、これらの計測装置で回転磁場の磁束密度を測定する。そして、測定されたx成分Bxとz成分Bzを式4に代入してF1を算出するか、式6に代入してF2を算出する。そうすると、各測点P1,P2,P3におけるF1は、図5に示すようにそれぞれ正弦波状の形状になり、各測点P1,P2,P3におけるF2も、図6に示すようにそれぞれ正弦波状の形状になる。
【0025】
ここで、F1またはF2の各測点間(P1とP2間、P2とP3間)の位相の時間差ΔT12およびΔT23を測定する。磁石2の回転の1周期をTとすると、時間差ΔT12およびΔT23から回転磁場の正弦波における磁石の回転角の位相差φ12およびφ23は、下記の式8および式9に表される。
【数8】
【数9】
【0026】
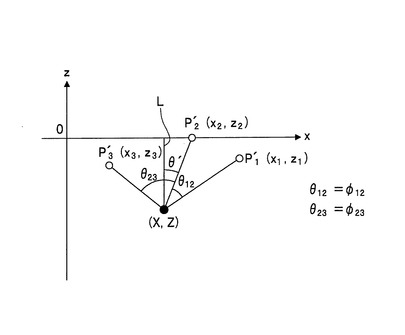
式8で示された回転角の位相差φ12は、各測点P1,P2を、原点Oを含むxz平面にそれぞれ投影した各投影点P1’,P2’から磁石2の位置を見込む見込み角度(直線OP1’と直線OP2’とが成す角度)θ12(図7参照)と等しくなる。また、式9で示された回転角の位相差φ23は、各測点P2,P3を、原点Oを含むxz平面にそれぞれ投影した各投影点P2’,P3’から磁石2の位置を見込む見込み角度(直線OP2’と直線OP3’とが成す角度)θ23(図7参照)と等しくなる。したがって、各測点P1,P2,P3間の回転磁場の正弦波における回転角の位相差φ12,φ23を読み取って、原点Oを含むxz平面にそれぞれ投影した各投影点P1’,P2’,P3’から磁石2の位置を見込む見込み角度θ12,θ23とみなすことで、各投影点P1’,P2’,P3’の各位置に対して相対的な磁石2の位置を算出して求めることができる。
【0027】
以下に、各見込み角度θ12,θ23から磁石2の位置を算出する方法を説明する。
【0028】
各測点座標を、P1(x1,y1,z1)、P2(x2,y2,z2)、P3(x3,y3,z3)とする。また、図7に示すように、磁石2の位置から地表への鉛直線Lと測点P2’との角度をθ’として、求めたい磁石2の位置を(X,Z)とすると、下記の式10〜式12からなる方程式が成立する。
【数10】
【数11】
【数12】
【0029】
これらの式10〜式12を整理すると、下記の式13および式14からなる連立方程式のようになる。
【数13】
【数14】
【0030】
この連立方程式を解くことで、磁石の位置(X,Z)を求めることができる。
【0031】
なお、前記の測点P1,P2,P3は、地上のみに配置してもよいし、地上と地中の組み合わせでもよく、任意の位置に設置することができる。また、前記の説明では、測点は三つ設けられていたが、四つ以上であってもよい。この場合、最小二乗法を適用して磁石の位置(X,Z)を求める。
【0032】
なお、本実施の形態では、F1またはF2の一方を用いて計算しているが、両方の関数式を用いて計算して平均値を採用するようにしてもよい。このようにすれば、位相差データの精度が向上する。なお、F2を計算する場合は、掘削装置2の回転軸の回転に同期した信号を選択的に検知して用いればよい。
【0033】
次に、掘削装置2の掘削距離より、磁石2のy座標を算出する。具体的には、例えば、ボーリングの延長距離を求めることで、y座標を精度よく算出することができる。以上のように、各座標を求めることで、3次元的に磁石2の位置を検知することができる。
【0034】
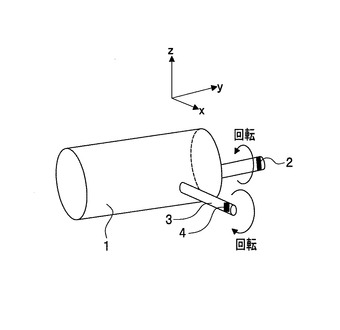
なお、掘削装置2が、シールドトンネル掘削機の場合は、図8に示すように、掘削装置1に、側方に掘削する側方掘削装置3を設け、掘削装置1の先端のほかに、側方掘削装置3の先端にも磁石4を設けて回転させて、前記の手法に従って、y座標を算出するようにしてもよい。
【0035】
具体的には、磁石4を、前記y軸およびz軸を含む平面上(またはx軸およびy軸を含む平面上)で回転させることで回転磁場を発生させ、地上あるいは地中の少なくとも三つの測点(図示せず)で磁石4が発生させる回転磁場の磁束密度のy軸成分およびz軸成分(またはx軸成分およびy軸成分)をそれぞれ時刻暦として測定し、得られたy軸成分およびz軸成分(または前記x軸成分およびy軸成分)より、正弦の関数式F1またはF2を求め、各測点の正弦波の位相の時間差から位相差をそれぞれ算出し、得られた位相差を、各測点を原点を含むyz平面(またはxy平面)にそれぞれ投影した各投影点から磁石4の位置を見込む見込み角度とみなし、この見込み角度より磁石4の位置のy座標およびz座標(またはx座標およびy座標)を算出する。これによって、y座標が算出され、先に算出されたx座標とz座標と合わせて、磁石4の位置を3次元的に検知することができる。
【0036】
以上のような方法によれば、掘削装置1内には磁石2を取り付けておくだけでよい。掘削機内1には精密機器を設置する必要がない。特に、磁石2を掘削装置1の回転軸に取り付けておけば、掘削機内1には磁石の回転のための回転機構や電源を別途に設置する必要がなく、位置検知のための装置は簡易な構造となる。また、回転磁場の測定は、地上や地中において、磁石2の回転による回転磁場を測定するだけでよいので、測定場所の制限を受けず、地上障害物に影響されることはない。さらに、その測定データに基づいて位置を算出することで地中位置を容易に検知することができる。
【0037】
前記した地中位置検知方法の他の検知方法としては、以下に説明するような方法もある。かかる地中位置検知方法は、掘削装置の回転軸に磁石を設け、この磁石を掘削装置の軸方向に直交するx軸およびz軸を含む平面上で回転させることで回転磁場を発生させ、地上あるいは地中の任意の測点で回転磁場の磁束密度の3方向成分(Bx,By,Bz)を測定する。そして、この磁束密度の3方向成分(Bx,By,Bz)と別途測定した磁石の回転角φと、事前に測定した磁石2の磁気モーメントmとを前記の式1、式2および式3に代入して磁石の位置を算出する。
【0038】
なお、磁石の回転角φは、掘削装置の回転軸の回転角度を検知することで測定される。また、磁石の磁気モーメントmは、磁石からある距離での磁場の振幅を予め測定しておくことで求めておく。
【0039】
このような方法によっても、磁石の回転による回転磁場を測定するだけでよいので、測定場所の制限を受けず、地上障害物に影響されることはない。さらに、その測定データに基づいて位置を算出することで地中位置を容易に検知することができる。
【0040】
なお、前記の検知方法の他には、磁場の振幅を測定する方法もある。この方向は、掘削装置の直上位置付近で、磁場を測定できる場合に適用できる方法であって、本発明の構成要件を示すものではない。この方法は、磁石の真上の位置で磁場が最大となる性質を利用した方法である。
【0041】
図9に示すように、掘削装置1の先端に磁石2を設けて回転させて回転磁場を発生させる。そして、その掘削装置1の真上位置付近の掘削計画線上で、回転磁場のz成分Bzを測定する。ここで、回転磁場のz成分Bzの振幅は、磁石が測点に近づくに連れて大きくなり、磁石が測点から遠ざかるに連れて小さくなる。すなわち、回転磁場のz成分Bzの振幅が最大になる位置の真下が掘削装置1の先端位置となる。そして、掘削装置1の深度は、測定した回転磁場の大きさもしくは距離減衰から逆算して求める。すなわち、回転磁場のz成分Bzは、下記の式15のように表され、磁石と測点との距離rの三乗に反比例する。
【数15】
【0042】
ここで、mは磁石の磁気モーメントであって、事前に磁石からある距離での磁場の振幅を測定しておくことで求めておき、mを式15に代入することによって、磁石と測点との距離rを算出することができる。
【0043】
以上、本発明を実施するための形態について説明したが、本発明は前記実施の形態に限定されず、本発明の趣旨を逸脱しない範囲で適宜設計変更が可能である。例えば、前記実施の形態では、磁石2は永久磁石にて構成されているが、電磁石等の他の構成であってもよい。
【図面の簡単な説明】
【0044】
【図1】本発明に係る地中位置検知方法の磁石と座標軸の定義を示した斜視図である。
【図2】(a)はF1の波形形状を示した波形図、(b)は測点をxz平面に投影した投影平面図である。
【図3】(a)はF2の波形形状を示した波形図、(b)は測点をxz平面に投影した投影平面図である。
【図4】本発明に係る地中位置検知方法の磁石と測点の配置例を示した斜視図である。
【図5】各測点のF1の波形形状をそれぞれ示した波形図である。
【図6】各測点のF2の波形形状をそれぞれ示した波形図である。
【図7】各測点から磁石を見た見込み角度を示した図である。
【図8】y座標を求める場合の掘削装置を示した概略図である。
【図9】磁界の振幅を利用して地中位置を検地する場合の掘削状態を示した概略図である。
【符号の説明】
【0045】
1,3 掘削装置
2,4 磁石
【技術分野】
【0001】
本発明は、ボーリングやシールドトンネルなどの掘削装置の地中位置を検知する地中位置検知方法に関する。
【背景技術】
【0002】
ボーリングやシールドトンネルなどの掘削装置の地中位置を検知する方法としては、従来、(1)ジャイロスコープを用いる方法と、(2)地磁気方位センサーおよび傾斜計を用いる方法と、(3)電磁誘導を利用した方法と、(4)弾性波を利用した方法などがあった。
【0003】
(1)のジャイロスコープを用いた方法は、ボーリングやシールドトンネルの坑内にジャイロスコープを出し入れして掘削孔の三次元的な曲がりを計測することにより、ボーリングやシールドトンネルの先端等の位置を検知するようになっている。
【0004】
(2)の地磁気方位センサーおよび傾斜計を用いる方法は、ボーリングやシールドトンネルの坑内に地磁気方位センサーおよび傾斜計をボーリングやシールドトンネル先端に設置してその位置を計測することにより、ボーリングやシールドトンネルの先端等の位置を検知するようになっている。
【0005】
(3)の電磁誘導を利用した方法は、ボーリングやシールドトンネルの先端に設置したコイルに電流を流して磁界を発生させ、その磁界の強度を地上で測定して、ボーリングやシールドトンネルの先端の位置を検知するようになっている。
【0006】
(4)の弾性波を利用した方法は、ボーリングやシールドトンネルの先端から弾性波を発生させ、地上あるいは地中で弾性波の到達時間を測定して、ボーリングやシールドトンネルの先端の位置を検知するようになっている。
【0007】
また、その他の位置検知方法としては、特許文献1および特許文献2に示すようなものもあった。特許文献1の位置検出装置は、相対向させて発進させた2台の地中掘削機の相対位置を検出するための装置であって、一方の地中掘削機の前部に磁界発生器が設けられ、他方の地中掘削機磁界検出器が設けられている。そして、磁界発生器から発生される磁界のピーク発生時間差に基づいて、磁界発生器から見た磁界検出器間の角度を求め、各地中掘削機間の相対位置を求めるようになっている。特許文献2の位置検出装置は、地下掘削体に磁力発生源が内蔵され、測定点に磁力発生源が発生する磁界の直交する3方向成分を検出可能な一の検出手段が設けられている。そして、三次元座標の原点に測定点を置き、y軸上に磁界発生源を任意の姿勢に置いた状態を想定して、所定の計算式を用いて、磁力発生源の位置を算出するようになっている。
【特許文献1】特開平3−257321号公報
【特許文献2】特開2006−10628号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、(1)のジャイロスコープを用いた方法では、坑内に装置を出し入れするため、位置検知を行うために掘削作業を一時中断する必要があり、作業効率が低下してしまうといった問題があった。また、(2)の地磁気方位センサーおよび傾斜計を用いる方法では、地磁気方位センサーおよび傾斜計等の精密機械をボーリングやシールドトンネル先端に設置し、計測データを有線あるいは無線にて外部に伝送するようになっているので、構造が複雑になる問題があるとともに、地磁気方位センサーの近くに鉄類があるとその測定結果に誤差を生じてしまうといった問題もあった。さらに(3)の電磁誘導を利用した方法では、コイルの真上で測定をする必要があるため、既設構造物の下方での測定は困難であるといった問題があった。また、(4)の弾性波を利用した方法では、坑内に弾性波発生のための装置が必要であるため、構造が複雑になる問題があるとともに、地層の弾性波速度が均質でない場合は、測定結果に大きな誤差を生じてしまうといった問題もあった。
【0009】
そこで、本発明は前記の問題を解決すべく案出されたものであって、位置検知のための装置を簡易な構造にすることができ、地上障害物に影響されることなく、ボーリングやシールドトンネルの地中位置を容易に検知することができる地中位置検知方法を提供することを課題とする。
【課題を解決するための手段】
【0010】
前記課題を解決するため、請求項1に係る発明は、掘削装置の地中位置を検知する地中位置検知方法において、前記掘削装置に磁石を設け、この磁石を、前記掘削装置の軸方向に伸びるy軸と直交するx軸およびz軸を含む平面上で回転させることで回転磁場を発生させ、少なくとも三つの測点で前記磁石が発生させる回転磁場の磁束密度のx軸成分およびz軸成分をそれぞれ時刻暦データとして測定し、前記x軸成分およびz軸成分より前記各測点間の位相差をそれぞれ算出し、得られた位相差を、原点を含むxz平面に前記各測点をそれぞれ投影した各投影点から前記磁石の位置を見込む見込み角度とみなし、前記見込み角度より前記磁石の位置のx座標およびz座標を算出し、他方、前記掘削装置の掘削距離より前記磁石の位置のy座標を算出することを特徴とする地中位置検知方法である。
【0011】
このような方法によれば、掘削装置内には磁石を取り付けておくだけでよいので、掘削機内には電源や精密機器を設置する必要がなく、位置検知のための装置は簡易な構造となる。また、回転磁場の測定は、地上や地中において、磁石からの磁場を測定するだけでよいので、測定場所の制限を受けず、地上障害物に影響されることはない。さらに、その測定データに基づいて位置を算出することで地中位置を容易に検知することができる。
【0012】
請求項2に係る発明は、掘削装置の地中位置を検知する地中位置検知方法において、前記掘削装置に磁石を設け、この磁石を、前記掘削装置の軸方向に伸びるy軸と直交するx軸およびz軸を含む平面上で回転させることで回転磁場を発生させ、少なくとも三つの測点で前記磁石が発生させる回転磁場の磁束密度のx軸成分およびz軸成分をそれぞれ時刻暦データとして測定し、前記x軸成分およびz軸成分より前記各測点間の位相差をそれぞれ算出し、得られた位相差を、原点を含むxz平面に前記各測点をそれぞれ投影した各投影点から前記磁石の位置を見込む見込み角度とみなし、前記見込み角度より前記磁石の位置のx座標およびz座標を算出し、他方、前記掘削装置に磁石を設け、この磁石を、前記y軸およびz軸を含む平面上、またはx軸およびy軸を含む平面上で回転させることで回転磁場を発生させ、少なくとも三つの測点で前記磁石が発生させる回転磁場の磁束密度のy軸成分およびz軸成分、またはx軸成分およびy軸成分をそれぞれ時刻暦データとして測定し、前記y軸成分およびz軸成分、または前記x軸成分およびy軸成分より前記各測点間の位相差をそれぞれ算出し、得られた位相差を、前記原点を含むyz平面またはxy平面に前記各測点をそれぞれ投影した各投影点から前記磁石の位置を見込む見込み角度とみなし、前記見込み角度より前記磁石の位置のy座標およびz座標、またはx座標およびy座標を算出することを特徴とする地中位置検知方法である。
【0013】
請求項1の方法が掘削装置の掘削距離よりy座標を算出するのに対して、請求項2の方法は、x座標とz座標と同様にy座標も回転磁場の磁束密度から算出するようにしたものである。このような方法によれば、請求項1の発明と同様に、位置検知に必要な装置は簡易な構造となる。また、回転磁場の測定は、測定場所の制限を受けず、地上障害物に影響されることはない。さらに、その測定データに基づいて位置を算出することで地中位置を容易に検知することができる。
【発明の効果】
【0014】
本発明によれば、位置検知のための装置を簡易な構造にすることができ、地上障害物に影響されることなく、ボーリングやシールドトンネルの地中位置を容易に検知することができるといった優れた効果を発揮する。
【発明を実施するための最良の形態】
【0015】
次に、本発明を実施するための最良の形態について、添付図面を参照しながら詳細に説明する。
【0016】
図1に示すように、磁石2の回転中心を原点Oとして、磁石2がy軸と直交するx軸およびz軸を含む平面上で回転する場合、磁石2のN極の向きのx軸からの回転角をφとすると、ある点P(x,y,z)における回転磁場の磁束密度の3方向成分(Bx,By,Bz)は、下記の式1、式2および式3で表される。
【数1】
【数2】
【数3】
【0017】
なお、式1〜式3中、rは点Pの原点Oからの距離を示し、mは磁石2の磁気モーメントを示している。
【0018】
次に、下記の式4に示す関数式F1を計算すると、図2の(a)に示すような、正弦波に表される。
【数4】
【0019】
ここで、図2の(b)に示すように、点Pを、原点Oを含むxz平面に投影した投影点P’(x,0,z)について、直線OP’のx軸からの角度をθとすると、F1が最大値となるときの磁石2の回転角φmと角度θとは、以下の式5のような関係が成立する。
【数5】
【0020】
また、下記の式6に示す関数式F2を計算すると、図3の(a)に示すような、正弦波に表される。
【数6】
【0021】
ここで、図3の(b)に示すように、点Pを、原点Oを含むxz平面に投影した投影点P’(x,0,z)について、直線OP’のx軸からの角度をθとすると、F2がマイナス側からプラス側へ変化するときのF2=0の時点の磁石2の回転角φ0と角度θとは、下記の式7のような関係が成立する。
【数7】
【0022】
すなわち、回転角φmおよびφ0は、直線OP’とx軸とが成す角θに、π(=180°)のn倍を加えたものに等しくなる。この性質を利用することで、地上あるいは地中で、時刻歴データとして測定した回転磁場の磁束密度のx成分Bxとz成分Bzから、以下に説明するようにして、測点Pに対する磁石2のx座標とz座標を求める。
【0023】
図4に示すように、本実施の形態に係る地中位置検知方法では、水平ボーリングやシールドトンネルなどの掘削装置1に磁石2が設けられている。磁石2には、永久磁石が用いられている。磁石2は、掘削装置1の回転軸などの回転部位に、磁石2のNS方向が掘削装置1の軸方向に直交するように取り付けられている。ここで、掘削装置1の軸方向をy軸にとり、このy軸に直交する水平方向をx軸にとり、y軸に直交する鉛直方向をz軸にとる。これによって、掘削装置1が作動して回転部位が回転すると、掘削装置1の軸方向に伸びるy軸と直交するx軸およびz軸を含む平面上で磁石2が回転することとなる。このように磁石2が回転することによって、回転磁場が発生する。
【0024】
そして、地上の二つの測点P1,P2と地中の測点P3の三箇所において、回転磁場の磁束密度のx成分Bxとz成分Bzとをそれぞれ時刻暦データとして測定する。なお、各測点P1,P2,P3には、3軸コイルやフラックスゲート磁力計などの計測装置が設けられており、これらの計測装置で回転磁場の磁束密度を測定する。そして、測定されたx成分Bxとz成分Bzを式4に代入してF1を算出するか、式6に代入してF2を算出する。そうすると、各測点P1,P2,P3におけるF1は、図5に示すようにそれぞれ正弦波状の形状になり、各測点P1,P2,P3におけるF2も、図6に示すようにそれぞれ正弦波状の形状になる。
【0025】
ここで、F1またはF2の各測点間(P1とP2間、P2とP3間)の位相の時間差ΔT12およびΔT23を測定する。磁石2の回転の1周期をTとすると、時間差ΔT12およびΔT23から回転磁場の正弦波における磁石の回転角の位相差φ12およびφ23は、下記の式8および式9に表される。
【数8】
【数9】
【0026】
式8で示された回転角の位相差φ12は、各測点P1,P2を、原点Oを含むxz平面にそれぞれ投影した各投影点P1’,P2’から磁石2の位置を見込む見込み角度(直線OP1’と直線OP2’とが成す角度)θ12(図7参照)と等しくなる。また、式9で示された回転角の位相差φ23は、各測点P2,P3を、原点Oを含むxz平面にそれぞれ投影した各投影点P2’,P3’から磁石2の位置を見込む見込み角度(直線OP2’と直線OP3’とが成す角度)θ23(図7参照)と等しくなる。したがって、各測点P1,P2,P3間の回転磁場の正弦波における回転角の位相差φ12,φ23を読み取って、原点Oを含むxz平面にそれぞれ投影した各投影点P1’,P2’,P3’から磁石2の位置を見込む見込み角度θ12,θ23とみなすことで、各投影点P1’,P2’,P3’の各位置に対して相対的な磁石2の位置を算出して求めることができる。
【0027】
以下に、各見込み角度θ12,θ23から磁石2の位置を算出する方法を説明する。
【0028】
各測点座標を、P1(x1,y1,z1)、P2(x2,y2,z2)、P3(x3,y3,z3)とする。また、図7に示すように、磁石2の位置から地表への鉛直線Lと測点P2’との角度をθ’として、求めたい磁石2の位置を(X,Z)とすると、下記の式10〜式12からなる方程式が成立する。
【数10】
【数11】
【数12】
【0029】
これらの式10〜式12を整理すると、下記の式13および式14からなる連立方程式のようになる。
【数13】
【数14】
【0030】
この連立方程式を解くことで、磁石の位置(X,Z)を求めることができる。
【0031】
なお、前記の測点P1,P2,P3は、地上のみに配置してもよいし、地上と地中の組み合わせでもよく、任意の位置に設置することができる。また、前記の説明では、測点は三つ設けられていたが、四つ以上であってもよい。この場合、最小二乗法を適用して磁石の位置(X,Z)を求める。
【0032】
なお、本実施の形態では、F1またはF2の一方を用いて計算しているが、両方の関数式を用いて計算して平均値を採用するようにしてもよい。このようにすれば、位相差データの精度が向上する。なお、F2を計算する場合は、掘削装置2の回転軸の回転に同期した信号を選択的に検知して用いればよい。
【0033】
次に、掘削装置2の掘削距離より、磁石2のy座標を算出する。具体的には、例えば、ボーリングの延長距離を求めることで、y座標を精度よく算出することができる。以上のように、各座標を求めることで、3次元的に磁石2の位置を検知することができる。
【0034】
なお、掘削装置2が、シールドトンネル掘削機の場合は、図8に示すように、掘削装置1に、側方に掘削する側方掘削装置3を設け、掘削装置1の先端のほかに、側方掘削装置3の先端にも磁石4を設けて回転させて、前記の手法に従って、y座標を算出するようにしてもよい。
【0035】
具体的には、磁石4を、前記y軸およびz軸を含む平面上(またはx軸およびy軸を含む平面上)で回転させることで回転磁場を発生させ、地上あるいは地中の少なくとも三つの測点(図示せず)で磁石4が発生させる回転磁場の磁束密度のy軸成分およびz軸成分(またはx軸成分およびy軸成分)をそれぞれ時刻暦として測定し、得られたy軸成分およびz軸成分(または前記x軸成分およびy軸成分)より、正弦の関数式F1またはF2を求め、各測点の正弦波の位相の時間差から位相差をそれぞれ算出し、得られた位相差を、各測点を原点を含むyz平面(またはxy平面)にそれぞれ投影した各投影点から磁石4の位置を見込む見込み角度とみなし、この見込み角度より磁石4の位置のy座標およびz座標(またはx座標およびy座標)を算出する。これによって、y座標が算出され、先に算出されたx座標とz座標と合わせて、磁石4の位置を3次元的に検知することができる。
【0036】
以上のような方法によれば、掘削装置1内には磁石2を取り付けておくだけでよい。掘削機内1には精密機器を設置する必要がない。特に、磁石2を掘削装置1の回転軸に取り付けておけば、掘削機内1には磁石の回転のための回転機構や電源を別途に設置する必要がなく、位置検知のための装置は簡易な構造となる。また、回転磁場の測定は、地上や地中において、磁石2の回転による回転磁場を測定するだけでよいので、測定場所の制限を受けず、地上障害物に影響されることはない。さらに、その測定データに基づいて位置を算出することで地中位置を容易に検知することができる。
【0037】
前記した地中位置検知方法の他の検知方法としては、以下に説明するような方法もある。かかる地中位置検知方法は、掘削装置の回転軸に磁石を設け、この磁石を掘削装置の軸方向に直交するx軸およびz軸を含む平面上で回転させることで回転磁場を発生させ、地上あるいは地中の任意の測点で回転磁場の磁束密度の3方向成分(Bx,By,Bz)を測定する。そして、この磁束密度の3方向成分(Bx,By,Bz)と別途測定した磁石の回転角φと、事前に測定した磁石2の磁気モーメントmとを前記の式1、式2および式3に代入して磁石の位置を算出する。
【0038】
なお、磁石の回転角φは、掘削装置の回転軸の回転角度を検知することで測定される。また、磁石の磁気モーメントmは、磁石からある距離での磁場の振幅を予め測定しておくことで求めておく。
【0039】
このような方法によっても、磁石の回転による回転磁場を測定するだけでよいので、測定場所の制限を受けず、地上障害物に影響されることはない。さらに、その測定データに基づいて位置を算出することで地中位置を容易に検知することができる。
【0040】
なお、前記の検知方法の他には、磁場の振幅を測定する方法もある。この方向は、掘削装置の直上位置付近で、磁場を測定できる場合に適用できる方法であって、本発明の構成要件を示すものではない。この方法は、磁石の真上の位置で磁場が最大となる性質を利用した方法である。
【0041】
図9に示すように、掘削装置1の先端に磁石2を設けて回転させて回転磁場を発生させる。そして、その掘削装置1の真上位置付近の掘削計画線上で、回転磁場のz成分Bzを測定する。ここで、回転磁場のz成分Bzの振幅は、磁石が測点に近づくに連れて大きくなり、磁石が測点から遠ざかるに連れて小さくなる。すなわち、回転磁場のz成分Bzの振幅が最大になる位置の真下が掘削装置1の先端位置となる。そして、掘削装置1の深度は、測定した回転磁場の大きさもしくは距離減衰から逆算して求める。すなわち、回転磁場のz成分Bzは、下記の式15のように表され、磁石と測点との距離rの三乗に反比例する。
【数15】
【0042】
ここで、mは磁石の磁気モーメントであって、事前に磁石からある距離での磁場の振幅を測定しておくことで求めておき、mを式15に代入することによって、磁石と測点との距離rを算出することができる。
【0043】
以上、本発明を実施するための形態について説明したが、本発明は前記実施の形態に限定されず、本発明の趣旨を逸脱しない範囲で適宜設計変更が可能である。例えば、前記実施の形態では、磁石2は永久磁石にて構成されているが、電磁石等の他の構成であってもよい。
【図面の簡単な説明】
【0044】
【図1】本発明に係る地中位置検知方法の磁石と座標軸の定義を示した斜視図である。
【図2】(a)はF1の波形形状を示した波形図、(b)は測点をxz平面に投影した投影平面図である。
【図3】(a)はF2の波形形状を示した波形図、(b)は測点をxz平面に投影した投影平面図である。
【図4】本発明に係る地中位置検知方法の磁石と測点の配置例を示した斜視図である。
【図5】各測点のF1の波形形状をそれぞれ示した波形図である。
【図6】各測点のF2の波形形状をそれぞれ示した波形図である。
【図7】各測点から磁石を見た見込み角度を示した図である。
【図8】y座標を求める場合の掘削装置を示した概略図である。
【図9】磁界の振幅を利用して地中位置を検地する場合の掘削状態を示した概略図である。
【符号の説明】
【0045】
1,3 掘削装置
2,4 磁石
【特許請求の範囲】
【請求項1】
掘削装置の地中位置を検知する地中位置検知方法において、
前記掘削装置に磁石を設け、この磁石を、前記掘削装置の軸方向に伸びるy軸と直交するx軸およびz軸を含む平面上で回転させることで回転磁場を発生させ、
少なくとも三つの測点で前記磁石が発生させる回転磁場の磁束密度のx軸成分およびz軸成分をそれぞれ時刻暦データとして測定し、
前記x軸成分およびz軸成分より前記各測点間の位相差をそれぞれ算出し、
得られた位相差を、原点を含むxz平面に前記各測点をそれぞれ投影した各投影点から前記磁石の位置を見込む見込み角度とみなし、
前記見込み角度より前記磁石の位置のx座標およびz座標を算出し、
他方、前記掘削装置の掘削距離より前記磁石の位置のy座標を算出する
ことを特徴とする地中位置検知方法。
【請求項2】
掘削装置の地中位置を検知する地中位置検知方法において、
前記掘削装置に磁石を設け、この磁石を、前記掘削装置の軸方向に伸びるy軸と直交するx軸およびz軸を含む平面上で回転させることで回転磁場を発生させ、
少なくとも三つの測点で前記磁石が発生させる回転磁場の磁束密度のx軸成分およびz軸成分をそれぞれ時刻暦データとして測定し、
前記x軸成分およびz軸成分より前記各測点間の位相差をそれぞれ算出し、
得られた位相差を、原点を含むxz平面に前記各測点をそれぞれ投影した各投影点から前記磁石の位置を見込む見込み角度とみなし、
前記見込み角度より前記磁石の位置のx座標およびz座標を算出し、
他方、前記掘削装置に磁石を設け、この磁石を、前記y軸およびz軸を含む平面上、またはx軸およびy軸を含む平面上で回転させることで回転磁場を発生させ、
少なくとも三つの測点で前記磁石が発生させる回転磁場の磁束密度のy軸成分およびz軸成分、またはx軸成分およびy軸成分をそれぞれ時刻暦データとして測定し、
前記y軸成分およびz軸成分、または前記x軸成分およびy軸成分より前記各測点間の位相差をそれぞれ算出し、
得られた位相差を、前記原点を含むyz平面またはxy平面に前記各測点をそれぞれ投影した各投影点から前記磁石の位置を見込む見込み角度とみなし、
前記見込み角度より前記磁石の位置のy座標およびz座標、またはx座標およびy座標を算出する
ことを特徴とする地中位置検知方法。
【請求項1】
掘削装置の地中位置を検知する地中位置検知方法において、
前記掘削装置に磁石を設け、この磁石を、前記掘削装置の軸方向に伸びるy軸と直交するx軸およびz軸を含む平面上で回転させることで回転磁場を発生させ、
少なくとも三つの測点で前記磁石が発生させる回転磁場の磁束密度のx軸成分およびz軸成分をそれぞれ時刻暦データとして測定し、
前記x軸成分およびz軸成分より前記各測点間の位相差をそれぞれ算出し、
得られた位相差を、原点を含むxz平面に前記各測点をそれぞれ投影した各投影点から前記磁石の位置を見込む見込み角度とみなし、
前記見込み角度より前記磁石の位置のx座標およびz座標を算出し、
他方、前記掘削装置の掘削距離より前記磁石の位置のy座標を算出する
ことを特徴とする地中位置検知方法。
【請求項2】
掘削装置の地中位置を検知する地中位置検知方法において、
前記掘削装置に磁石を設け、この磁石を、前記掘削装置の軸方向に伸びるy軸と直交するx軸およびz軸を含む平面上で回転させることで回転磁場を発生させ、
少なくとも三つの測点で前記磁石が発生させる回転磁場の磁束密度のx軸成分およびz軸成分をそれぞれ時刻暦データとして測定し、
前記x軸成分およびz軸成分より前記各測点間の位相差をそれぞれ算出し、
得られた位相差を、原点を含むxz平面に前記各測点をそれぞれ投影した各投影点から前記磁石の位置を見込む見込み角度とみなし、
前記見込み角度より前記磁石の位置のx座標およびz座標を算出し、
他方、前記掘削装置に磁石を設け、この磁石を、前記y軸およびz軸を含む平面上、またはx軸およびy軸を含む平面上で回転させることで回転磁場を発生させ、
少なくとも三つの測点で前記磁石が発生させる回転磁場の磁束密度のy軸成分およびz軸成分、またはx軸成分およびy軸成分をそれぞれ時刻暦データとして測定し、
前記y軸成分およびz軸成分、または前記x軸成分およびy軸成分より前記各測点間の位相差をそれぞれ算出し、
得られた位相差を、前記原点を含むyz平面またはxy平面に前記各測点をそれぞれ投影した各投影点から前記磁石の位置を見込む見込み角度とみなし、
前記見込み角度より前記磁石の位置のy座標およびz座標、またはx座標およびy座標を算出する
ことを特徴とする地中位置検知方法。
【図1】

【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2008−216032(P2008−216032A)
【公開日】平成20年9月18日(2008.9.18)
【国際特許分類】
【出願番号】特願2007−53691(P2007−53691)
【出願日】平成19年3月5日(2007.3.5)
【出願人】(000206211)大成建設株式会社 (1,602)
【出願人】(301021533)独立行政法人産業技術総合研究所 (6,529)
【Fターム(参考)】
【公開日】平成20年9月18日(2008.9.18)
【国際特許分類】
【出願日】平成19年3月5日(2007.3.5)
【出願人】(000206211)大成建設株式会社 (1,602)
【出願人】(301021533)独立行政法人産業技術総合研究所 (6,529)
【Fターム(参考)】
[ Back to top ]