
地合検査装置及び地合検査方法
【課題】人間の視覚と同様の粒度や明度に応じた地合の違いを検査条件等の違いに拘わらず地合指数を用いて客観的に比較、評価することができる地合検査装置及び地合検査方法を提供する。
【解決手段】地合検査装置は、シート状の検査対象物を撮影して得られた画像の画像データD1に対してFFT演算を行って空間周波数毎のコントラストを示すコントラスト分布画像を求めるFFT演算部55と、撮影された画像の明度とその画像に対する観察視野を考慮した空間周波数毎のコントラスト感度を求めるMTF演算部56と、FFT演算部55で得られたコントラスト分布画像とMTF演算部56で得られたコントラスト感度とを空間周波数毎に乗算して加算することにより地合指数DXを算出する局所地合指数演算部57とを備える。
【解決手段】地合検査装置は、シート状の検査対象物を撮影して得られた画像の画像データD1に対してFFT演算を行って空間周波数毎のコントラストを示すコントラスト分布画像を求めるFFT演算部55と、撮影された画像の明度とその画像に対する観察視野を考慮した空間周波数毎のコントラスト感度を求めるMTF演算部56と、FFT演算部55で得られたコントラスト分布画像とMTF演算部56で得られたコントラスト感度とを空間周波数毎に乗算して加算することにより地合指数DXを算出する局所地合指数演算部57とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、紙や不織布等の薄いシート状の検査対象物の地合を検査する地合検査装置及び地合検査方法に関する。
【背景技術】
【0002】
紙や不織布等の薄いシート状の製品は、製造効率を高めつつ一定の品質を保持するために、水分、厚み、地合(繊維の分布状態)等が検査されながら製造されるのが一般的である。従来、製品に対してなされる検査の一つである地合の検査は、熟練の検査員による目視検査により行われていたが、近年では地合の自動的な検査を可能とする地合検査装置が開発されている。
【0003】
従来の地合検査装置は、検査対象物としての製品を撮影して得られる画像データに対して画像処理を行い、輝度の標準偏差、分散、平均値等から地合指数(地合を評価するために用いる指数)を求めて検査するものが一般的である。例えば、画像データに対して画像処理を施して輝度(製品の透過率や吸光度)の標準偏差と平均値とを求め、輝度の標準偏差を平均値で除算して均一度を求め、この均一度を地合指数にして製品の検査を行う。このような従来の地合検査装置の詳細については、例えば以下の特許文献1〜6を参照されたい。
【0004】
しかしながら、上記の地合指数には、粒度(繊維のムラによって生ずる明るい領域(暗い領域)の集まり具合を示す情報)が全く反映されていない。このため、上記の特許文献1〜6に開示された地合検査装置で得られる検査結果と熟練の検査員による検査結果との間に乖離が生ずる場合がある。そこで、地合指数に粒度を反映させて地合検査を行う地合検査装置も提案されている。
【0005】
具体的に、以下の特許文献7では、考慮すべき粒度と同程度の大きさを有する複数の領域に検査対象領域が区分されるよう画像データを処理し、区分した領域の各々の均一度を求めて地合指数とすることで、粒度を地合指数に反映させている。また、以下の特許文献8では、人間が地合を判定する際に敏感に感応すると考えられる周波数成分の存在割合を使用することで、粒度を地合指数に反映させている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第2692299号公報
【特許文献2】特許第2738066号公報
【特許文献3】特許第2751410号公報
【特許文献4】特許第2797474号公報
【特許文献5】特許第3227852号公報
【特許文献6】特開平06−050906号公報
【特許文献7】特開平11−281589号公報
【特許文献8】特開2000−009660号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、人間の視覚は、均一度及び平均輝度が同じであっても粒度が異なるもの、或いは、均一度及び粒度が同じであっても平均輝度が異なるものについては、地合が異なると認識することができる。図28は、均一度及び平均輝度が同じであって粒度が異なる画像を示す図であり、図29は、均一度及び粒度が同じであって平均輝度が異なる画像を示す図である。尚、図28では、(a),(b),(c)の順で粒度が大きくなる画像を示しており、図29では、(a),(b),(c)の順で平均輝度が高くなる画像を図示している。
【0008】
図28に示す例を参照すると、画像の地合は、(c)に示す画像が最も良く、次いで(a)に示す画像が良く、(b)に示す画像が最も悪いと認識することができる。また、図29に示す例を参照すると、画像の地合は、(a)に示す画像が最も良く、次いで(b)に示す画像が良く、(c)に示す画像が最も悪いと認識することができる。このように、人間の視覚は、粒度や明度(平均輝度)に応じた地合の違いを認識することができる。
【0009】
しかしながら、上述した特許文献1〜6に開示された地合検査装置は、均一度のみを地合指数として用いており、粒度が反映された地合指数を用いている訳ではない。このため、図28に示すような均一度及び平均輝度が同じであって粒度が異なる画像の違いを検出することができないという問題がある。また、上述した特許文献7,8に開示された地合検査装置は、均一度に加えて粒度が反映された地合指数を用いているが、明度が考慮された地合指数を用いている訳ではない。このため、図29に示すような均一度及び粒度が同じであって平均輝度が異なる画像の違いを検出することができないという問題がある。
【0010】
また、従来の地合検査装置で用いられている地合指数は統一されたものではなく、検査装置毎に異なるものが用いられている。例えば、ある地合検査装置では、地合が良好なものほど値が小さくなる地合指数を用いており、他の地合検査装置では、地合が良好なものほど値が大きくなる地合指数を用いているといった具合である。このため、地合検査装置の種類が異なってしまうと、同じ製品や検査対象物を検査したとしても異なる地合指数が得られてしまい、地合指数のみで地合を客観的に比較、評価することができないという問題がある。
【0011】
更に、同種の地合検査装置であっても、検査に用いられている装置及び機器の器差(例えば、照明装置、画像入力装置、光学部品等の器差)や検査条件の違い(例えば、照明条件や撮影条件の違い)があると、異なる地合指数が得られてしまう。このため、同種の地合検査装置を用いる場合であっても、器差の影響が無く、且つ、検査条件が厳密に同じで無ければ、地合指数のみで地合を客観的に比較、評価することができないという問題がある。
【0012】
本発明は上記事情に鑑みてなされたものであり、人間の視覚と同様の粒度や明度に応じた地合の違いを検査条件等の違いに拘わらず地合指数を用いて客観的に比較、評価することができる地合検査装置及び地合検査方法を提供することを目的とする。
【課題を解決するための手段】
【0013】
上記課題を解決するために、本発明の地合検査装置は、シート状の検査対象物(P)の一方面及び他方面の少なくとも一方が撮像された画像データに対する画像処理を行って求めた地合指数(DX)を用いて前記検査対象物の地合を検査する地合検査装置(1〜4)において、前記画像データに対してFFT演算を行って空間周波数毎のコントラストを示す第1データを得る第1演算手段(55)と、前記第1演算手段で得られた第1データと、前記画像の明度及び前記画像に対する観察視野を考慮した空間周波数毎のコントラスト感度を示す第2データとを、空間周波数毎に乗算して加算することにより前記地合指数を算出する第2演算手段(57)とを備えることを特徴としている。
この発明によると、シート状の検査対象物の画像を示す画像データに対してFFT演算が行われて空間周波数毎のコントラストを示す第1データが求められ、この第1データとシート状の検査対象物の画像の明度及び該画像に対する観察視野を考慮した空間周波数毎のコントラスト感度を示す第2データとが空間周波数毎に乗算されて加算されることによって地合指数が算出される。
また、本発明の地合検査装置は、前記第2演算手段が、前記第1演算手段で得られた第1データと前記第2データとを空間周波数毎に乗算して得られた値に対して所定の重み付けを行って加算することを特徴としている。
また、本発明の地合検査装置は、前記画像データを、前記画像の物理的な輝度を示す画像データに変換する変換手段(51)を備えることを特徴としている。
また、本発明の地合検査装置は、前記画像の物理的な輝度が予め設定された基準輝度となるように、前記変換手段で変換された画像データを調整する調整手段(52)を備えることを特徴としている。
また、本発明の地合検査装置は、前記変換手段で変換された画像データに対し、複数の局所領域を設定する設定手段(54)と、前記設定手段によって設定された局所領域毎に、前記第1,第2演算手段の各々による演算により求められた局所地合指数に対して所定の統計演算を行って前記地合指数を算出する統計演算手段(59)とを備えることを特徴としている。
また、本発明の地合検査装置は、前記第1データと前記第2データとを空間周波数毎に乗算することによって前記第2演算手段で得られる第3データを、予め規定された空間周波数の領域であるクラス毎に加算することにより、該クラス毎の地合指数を算出する第3演算手段(81n)を備えることを特徴としている。
ここで、本発明の地合検査装置は、前記第3演算手段が、前記第3データに対して前記クラス毎に規定された所定の重み付けを行って、前記クラス毎に加算することを特徴としている。
或いは、本発明の地合検査装置は、前記第1データと前記第2データとを空間周波数毎に乗算することによって前記第2演算手段で得られる第3データに対し、予め規定されたクラス毎に規定された重みデータを乗算して加算することにより、該クラス毎の地合指数を算出する第4演算手段(81n)を備えることを特徴としている。
ここで、本発明の地合検査装置は、前記第4演算手段が、前記第3データと前記重みデータとを乗算して得られる値に対して前記クラス毎に規定された所定の重み付けを行って、前記クラス毎に加算することを特徴としている。
本発明の地合検査方法は、シート状の検査対象物(P)の一方面及び他方面の少なくとも一方の画像を示す画像データを取得し、該画像データに対する画像処理を行って求めた地合指数(DX)を用いて前記検査対象物の地合を検査する地合検査方法であって、前記画像データに対してFFT演算を行って空間周波数毎のコントラストを示す第1データを得る第1ステップと、前記画像の明度及び前記画像に対する観察視野を考慮した空間周波数毎のコントラスト感度を示す第2データを得る第2ステップと、前記第1ステップで得られた第1データと前記第2ステップで得られた第2データとを、空間周波数毎に乗算して加算することにより前記地合指数を算出する第3ステップとを有することを特徴としている。
【発明の効果】
【0014】
本発明によれば、シート状の検査対象物の画像を示す画像データに対してFFT演算を行って空間周波数毎のコントラストを示す第1データを求め、この第1データとシート状の検査対象物の画像の明度及び該画像に対する観察視野を考慮した空間周波数毎のコントラスト感度を示す第2データとを空間周波数毎に乗算して加算することによって、実際に人間が検査対象物を検査した際の地合の目立ち度合を反映させた地合指数を算出している。このため、人間の視覚と同様の粒度や明度に応じた地合の違いを検査条件等の違いに拘わらず地合指数を用いて客観的に比較、評価することができるという効果がある。
【図面の簡単な説明】
【0015】
【図1】本発明の第1実施形態による地合検査装置の構成を示すブロック図である。
【図2】視覚のMTF特性を説明するための図である。
【図3】縞パターンの空間周波数とコントラスト感度との関係を示すMTF特性の一例を示す図である。
【図4】二次元のMTF特性の一例を示す図である。
【図5】異方性を考慮した二次元のMTF特性の一例を示す図である。
【図6】本発明の第1実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。
【図7】図28に示す画像から求められる局所地合指数の二次元分布を示す地合分布画像及び地合指数を示す図である。
【図8】図29に示す画像から求められる局所地合指数の二次元分布を示す地合分布画像及び地合指数を示す図である。
【図9】局所地合指数を算出する際に重み付け演算を行わない場合と重み付けを行った場合との効果の差を説明するための図である。
【図10】図9に示す効果の差を説明するために用いる地合パターンの一例を示す図である。
【図11】本発明の第2実施形態による地合検査装置の構成を示すブロック図である。
【図12】本発明の第3実施形態による地合検査装置の構成を示すブロック図である。
【図13】本発明の第4実施形態による地合検査装置の構成を示すブロック図である。
【図14】本発明の第5実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。
【図15】本発明の第6実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。
【図16】本発明の第6実施形態におけるクラスの分類法の一例を示す図である。
【図17】本発明の第6実施形態において観察した画像の一例を示す図である。
【図18】図17に示す画像から求められる地合分布画像を示す図である。
【図19】図17に示す画像から求められるクラス別地合分布画像を示す図である。
【図20】本発明の第6実施形態で観察を行った複数の画像を示す図である。
【図21】図20に示す画像の各々から求められるクラス別地合指数を示す図である。
【図22】本発明の第7実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。
【図23】本発明の第8実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。
【図24】本発明の第8実施形態において求められるクラス影響度判定画像の一例を示す図である。
【図25】検査対象物としての紙の生産工程の概略を示す工程図である。
【図26】操業条件の変更に伴うクラス別地合指数DXnの変化例を示す図である。
【図27】印刷前に求められた地合指数又はクラス別地合指数と印刷後に行われた目視評価の結果との相関を説明するための図である。
【図28】均一度及び平均輝度が同じであって粒度が異なる画像を示す図である。
【図29】均一度及び粒度が同じであって平均輝度が異なる画像を示す図である。
【発明を実施するための形態】
【0016】
以下、図面を参照して本発明の実施形態による地合検査装置及び地合検査方法について詳細に説明する。尚、以下では、理解を容易にするために、検査対象物が紙であるものとし、紙の地合を検査する地合検査装置及び地合検査方法を例に挙げて説明する。但し、本発明は、紙以外にも不織布等の薄いシート状の検査対象物の地合を検査する地合検査装置及び地合検査方法にも適用可能である。
【0017】
〔第1実施形態〕
〈地合検査装置の構成〉
図1は、本発明の第1実施形態による地合検査装置の構成を示すブロック図である。図1に示す通り、本実施形態の地合検査装置1は、照明装置10、画像入力装置20、及び制御処理装置30を備えており、搬送方向Z1に搬送される紙P(検査対象物)を撮影して得られる画像データに対する画像処理を行い、この画像処理により得られる地合指数に基づいて紙Pの地合を検査する。尚、本実施形態の地合検査装置1は、紙Pを透過した光による画像(透過光画像)から紙Pの地合を検査する透過光方式の地合検査装置である。
【0018】
照明装置10は、光源11及び光学素子12を備えており、紙Pの裏面側に配置されて、紙Pの裏面に対して照明光を照射する。光源11は、紙Pに照射すべき照明光(例えば、白色光)を射出する。この光源11としては、点光源、線光源、及び面光源の何れを用いることもできるが、点光源よりは線光源が望ましく、線光源よりは面光源が望ましい。また、紙Pが搬送方向Z1に高速で搬送される場合には、ストロボ発光する光源が望ましい。光学素子12は、例えばレンズ等であり、光源11から射出された照明光を紙Pの裏面に投射する。尚、この光学素子12は、不要であれば省略可能である。
【0019】
画像入力装置20は、光学素子21及び撮像装置22を備えており、紙Pの表面側に配置されて、紙Pの表面の画像を撮影して得られる画像(一次元画像又は二次元画像)の画像データを出力する。具体的に、画像入力装置20は、撮像装置22によって撮影される領域が、照明装置10によって照明光が照射される領域と紙Pを挟んで重なるように配置される。
【0020】
光学素子21は、例えばレンズ等であり、紙Pを透過した光(透過光)を撮像装置22に導く。撮像装置22は、フォトダイオード、CCD(Charge Coupled Device:電荷結合素子)、CMOS(Complementary Metal Oxide Semiconductor:相補型金属酸化膜半導体)等の撮像素子を備えており、撮影した画像の画像データを出力する。尚、撮像素子22は、一次元画像の画像データを出力するもの、二次元画像の画像データを出力するものの何れを用いることもできるが、本実施形態では二次元画像の画像データを出力するものを例に挙げて説明する。
【0021】
制御処理装置30は、照明制御部31、画像取込部32、記憶部33、画像処理部34、検査制御部35、及び検査結果出力部36を備えており、紙Pに対する照明光の照射制御を行うとともに、画像入力装置20から出力される画像データに対する画像処理を行う。そして、画像処理により得られる地合指数を用いて紙Pの地合を検査し、その検査結果を出力する。
【0022】
照明制御部31は、検査制御部35の制御の下で、紙Pに照射される照明光の光量制御や照射タイミングの制御(例えば、ストロボ発光のタイミング制御)等を行う。画像取込部32は、例えば画像ボード等であり、検査制御部35の制御の下で画像入力装置20から出力される画像データを取り込む。記憶部33は、例えば、RAM(Random Access Memory)等のメモリで実現され、画像取込部32で取り込まれた画像データを記憶する。
【0023】
画像処理部34は、検査制御部35の制御の下で、記憶部33に記憶された画像データを読み出して画像処理を行い、紙Pの地合を評価するための地合指数を算出する。ここで、画像処理部34で算出される地合指数は、実際に人間が紙Pを検査した際の地合の目立ち度合を反映させたものであり、人間の視覚の感知限界(JND:Just Noticeable Difference)を基準として定量的に表現したものである。尚、本実施形態で用いられる地合指数の詳細及び画像処理部34で行われる画像処理の詳細については後述する。
【0024】
検査制御部35は、制御処理装置30に設けられた各ブロックを制御することにより、地合検査装置1の動作を統括して制御する。具体的には、照明制御部31を制御して紙Pに照射される照明光の光量制御等を行い、画像取込部32を制御して画像データの取り込み制御を行う。また、画像処理部34を制御して画像処理の実行制御を行い、画像処理部34で算出された地合指数を用いた検査結果の出力を行う。検査結果出力部36は、例えばディスプレイ、データベースサーバ、レコーダ等に対し、地合指数の算出結果や地合指数を用いた紙Pの検査結果を出力する。
【0025】
〈地合指数の詳細〉
次に、本実施形態で用いられる地合指数の詳細について説明する。人間の視覚の感知限界(JND)を基準として地合指数を表現するために、本実施形態では、視覚の空間周波数感度特性、即ちMTF(Modulation Transfer Function)特性を利用する。図2は、視覚のMTF特性を説明するための図である。
【0026】
視覚のMTF特性とは、図2に示す通り、明暗が正弦波状に変化する縞パターンを人間が観察する際に、縞パターンの空間周波数とコントラスト感度との関係を示すものであり、別の呼び方で視覚系のコントラスト感度関数(CSF:Contrast Sensitivity Function)に相当するものである。ここで、コントラスト感度とは、明暗が正弦波状に変化する縞パターンを人間が観察する際に、感知することができる限界のコントラスト(以下、JNDコントラストという)の逆数をいう。
【0027】
いま、図2に示す通り、最大輝度がLMAXであり、最小輝度がLMINであり、背景輝度がLAである縞パターンを観察する場合を考える。かかる縞パターンを観察した場合に、人間が感知することができる限界の輝度差ΔLとすると、JNDコントラストCJNDは以下の(1)式で表され、コントラスト感度Mは以下の(2)式で表される。尚、背景輝度LA及び輝度差ΔLは、例えば以下の(3),(4)式でそれぞれ表される。
【0028】
【数1】

【数2】
【数3】
【数4】
【0029】
図3は、縞パターンの空間周波数とコントラスト感度との関係を示すMTF特性の一例を示す図である。図3(a)を参照すると、コントラスト感度は、観察する縞パターンの空間周波数に応じて変化し、ある空間周波数f0で最大となることが分かる。図28(a)〜(c)に示す画像(均一度及び平均輝度が同じであるが粒度が異なる画像)において、図28(b)に示す画像の地合が目立つように観察されるのは、このような空間周波数に応じたコントラスト感度の違いに起因する。
【0030】
ここで、MTF特性は、背景輝度(明度)や観察視角によっても変化する。図3(b)は、背景輝度を変化させたときのMTF特性を示す図であり、図3(c)は観察視角を変化させたときのMTF特性を示す図である。尚、図3(b)においては、グラフL14〜L11の順に背景輝度が高くなっており、図3(c)においては、グラフL24〜L21の順に観察視角が大きくなっている。
【0031】
図3(b)を参照すると、コントラスト感度は背景輝度が高いほど高くなることが分かる。これは、背景輝度が低い場合よりも高い場合の方が小さなコントラスト差を感知できることを意味する。また、コントラスト感度が最大になる周波数は背景輝度が高くなるにつれて高くなる傾向があることも分かる。図29(a)〜(c)に示す画像(均一度及び粒度が同じであるが平均輝度が異なる画像)において、図29(c)に示す画像の地合が目立つように観察されるのは、このような背景輝度に応じたコントラスト感度の違いに起因する。また、図3(c)を参照すると、コントラスト感度は観察視野が大きくなるほど高くなることが分かる。
【0032】
一般的に、視覚のMTF特性は、以下の(5)式に示すガウス関数Gで表される。
【数5】
但し、上記(5)式中の変数uは空間周波数であり、変数σはガウス関数Gの広がりを決める変数である。尚、空間周波数uの単位は、視角1°当りのサイクル数を示すcpd(cycle per degree:[サイクル数/視角])である。
【0033】
図3(b),図3(c)を用いて説明した通り、MTF特性(コントラスト感度)は、空間周波数uに応じて変化するだけではなく、背景輝度LAや観察視角dによっても変化する。このような空間周波数u以外にも背景輝度LAや観察視角dを考慮した一次元のMTF特性(コントラスト感度MB1)は、例えば以下の(6)式で表される。
【数6】
【0034】
但し、上記(6)式中の関数Xは、高周波でのコントラスト感度MB1の低下を表現する関数である。また、関数φ1は、コントラスト感度MB1が背景輝度LAの平方根に比例するという特性を示す関数であり、関数φ2は、低周波でのコントラスト感度MB1の単調増加を表現する関数である。尚、上記(6)式中のkは、所定の定数である。上記(6)式において、ガウス関数Gは、眼球のレンズ系による高周波の感度低下を表現する関数として用いられ、変数σは背景輝度LAにより決まる瞳の大きさを示す変数として用いられる。
【0035】
尚、上記(6)式の詳細は、例えば以下の文献に開示されている。
「PHYSICAL MODEL FOR THE CONTRAST SENSITIVITY OF THE HUMAN EYE」,Barten.P.G.J.,SPIE Proceedings,vol.1666,57-64,(1992)
上記(6)式は、DICOM(Digital Imaging and Communications in Medicine)という「医用デジタル画像と通信」に関する国際標準規格において、そのPart 14「表示デバイスの階調特性を統一するための画像表示関数」の規格設計に利用されているモデルである。尚、コントラスト感度MB1は、一次元のMTF特性を近似できる関数であれば良く、上記(6)式に限定される訳ではない。但し、背景輝度が考慮された関数であることが望ましく、更には観察視角が考慮された関数であることが望ましい。
【0036】
本実施形態の地合検査装置1は、紙Pの二次元画像を撮影して地合を検査するものである。上記(6)式は、一次元のMTF特性を表すものであることから、本実施形態では二次元のMTF特性を表す式を用いる必要がある。空間周波数uを水平方向の空間周波数uhと垂直方向の空間周波数uvとで表現すると、上記(6)式で示される一次元MTF特性(コントラスト感度MB1)を以下の(7)式に示す二次元のMTF特性(コントラスト感度MB1)に拡張することができる。
【数7】
但し、上記(7)式中の関数u(uh,uv)は、以下の(8)式に示す関数である。
【数8】
【0037】
図4は、二次元のMTF特性の一例を示す図である。図4に示す二次元のMTF特性は、図3(a)に示す一次元のMTF特性を、直流成分(周波数が0である成分)を中心に回転させていわば同心円状にしたものである。このため、例えば図4に示す二次元のMTF特性の中心点Oから端点Aに至るまでの破線に沿うMTF特性を求めると、図3(a)に示す一次元のMTF特性を得ることができる。
【0038】
ここで、二次元のMTF特性は、縞パターンの配列方向に応じて異方性があることが知られている。図5は、異方性を考慮した二次元のMTF特性の一例を示す図である。図5に示す通り、異方性を考慮した二次元のMTF特性は、白い部分(コントラスト感度が高い部分)が中心から水平方向及び垂直方向に延びたものとなる。これは、水平方向に沿って明暗が交互に現れる縞パターン(0度の縞パターン)や垂直方向に沿って明暗が交互に現れる縞パターン(90度の縞パターン)についてはコントラスト感度が高いが、水平方向及び垂直方向の双方に対する斜め方向に沿って明暗が交互に現れる縞パターン(45度の縞パターン)に対してはコントラスト感度が低いことを意味する。
【0039】
図5に示す異方性を考慮したMTF特性は、図4に示す異方性を考慮していないMTF特性よりも人間の視覚のMTF特性に近いものである。このため、図5に示す異方性を考慮したMTF特性を用いることで、人間が紙Pの地合を検査する場合と同様の検査を実現することが可能になる。
【0040】
縞パターンの配列方向に応じた異方性を表現する補正関数Dは、例えば以下の(9)式で表される。
【数9】
但し、上記(9)式中のδ,ε,ζ,ηは定数であり、関数θ(uh,uv)は以下の(10)式で表される関数である。
【数10】
【0041】
図5に示す異方性を考慮した二次元のMTF特性(コントラスト感度M2)は、以下の(11)式に示す通り、前述した(7)式に上記(9)式を乗算することで得られる。
【数11】
【0042】
ここで、前述した通り、画像処理部34で算出される地合指数は、実際に人間が紙Pを検査した際の地合の目立ち度合を反映させたものであり、人間の視覚の感知限界(JND)を基準として定量的に表現したものである。いま、空間周波数がuであって背景輝度がLAである正弦波状の縞パターンが検査対象物としての紙Pに形成されており、これを観察視角dで観察している場合を考える。
【0043】
この縞パターンの背景輝度LAに対するコントラストをCとし、背景輝度LA及び観察視角dにおけるMTF特性により、空間周波数uのコントラスト感度をMuとすると、目立ち度合Jは、以下の(12)式で求められる。
【数12】
【0044】
上記(12)式を参照すると、目立ち度合Jは、コントラストCとコントラスト感度Muとを乗算したものである。ここで、前述した(2)式に示した通り、コントラスト感度は、明暗が正弦波状に変化する縞パターンを人間が観察する際に、感知することができる限界のコントラストであるJNDコントラストの逆数である。このため、上記(12)式に示す通り、目立ち度合Jは、コントラストCをJNDコントラストCJNDで除算したものでもあることから、「コントラストCがJNDコントラストCJNDの何倍であるか」を意味するものである。本実施形態では、このJNDコントラストCJNDが単位(以下、この単位を[JND]と表記する)となる目立ち度合Jを、地合指数として用いている。
【0045】
この目立ち度合Jは、0[JND]以上の値をとる。例えば、目立ち度合Jの値が0[JND]である場合には検査対象物が完全に均一であることを意味し、1[JND]である場合には検査対象物が感知限界であることを意味する。また、目立ち度合Jの値が1[JND]よりも小である場合には人間には感知できないことを意味し、1[JND]以上である場合には、人間が感知できることを意味する。尚、目立ち度合Jの値が大きくなるにつれて地合が目立つようになるため悪い地合であることを意味する。
【0046】
尚、上記(12)式に示す通り、地合指数(目立ち度合J)を求めるには、縞パターンの背景輝度LAに対するコントラストCを得る必要がある。ここで、検査対象物としての紙Pを撮影して得られる画像データは、複数の空間周波数成分が重なり合った状態のものである。このため、画像データに対して高速フーリエ変換(FFT:Fast Fourier Transform)を行って、空間周波数毎のコントラストを示すコントラスト分布画像を得ている。尚、コントラスト分布画像を容易に得るために、画像入力装置20から出力される画像データを、画像入力装置20で得られる画像の物理的な輝度を示す画像データに変換してからFFT演算を行うのが望ましい。
【0047】
〈画像処理部の構成〉
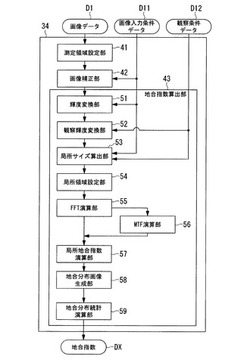
次に、以上説明した地合指数(目立ち度合J)を算出する画像処理部34の具体的構成について説明する。図6は、本発明の第1実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。図6に示す通り、画像処理部34は、測定領域設定部41、画像補正部42、及び地合指数算出部43を備えており、検査制御部35から出力される画像入力条件データD11及び観察条件データD12に応じ、記憶部33から読み出した画像データD1に対する画像処理を行って地合指数DXを算出する。
【0048】
ここで、検査制御部35から出力される画像入力条件データD11は、検査対象物としての紙Pの画像を得るために用いられている照明装置10及び画像入力装置20の器差の影響を排除するためのデータであり、例えば輝度変換特性パラメータ、露光時間パラメータ、ノイズ特性パラメータ、実寸変換パラメータを含むデータである。他方、検査制御部35から出力される観察条件データD12は、検査対象物としての紙Pの観察条件を人間が紙Pを観察する場合と同様の観察条件に設定するためのデータであり、例えば観察視距離パラメータ及び観察輝度パラメータを含むデータである。
【0049】
画像入力条件データD11に含まれる輝度変換特性パラメータは、画像入力装置20から出力される画像データ(記憶部33から読み出した画像データD1)を物理量としての輝度値(例えば、単位が[cd/m2]である輝度値)に変換するために用いられるパラメータである。露光時間パラメータは、画像入力装置20が備える撮像装置22で紙Pを撮影する際の露光時間を示すパラメータである。
【0050】
上記の輝度変換特性パラメータとしては、例えば予め輝度の安定した光源(例えば、積分球等を備える光源)の輝度を変化させながら画像入力装置20で光源を撮影して画像データを得ておき、輝度及び露光時間に対する画像データの階調特性をもとに作成した変換テーブルの値、或いは、変換式の係数が用いられる。
【0051】
ここで、一般的に、画像入力装置20から出力される画像データの階調Vは、露光時間Tに比例するとともに、画像入力装置20が産業用である場合には入力輝度Lに比例し、画像入力装置20が民生用である場合には入力輝度Lのべき乗に比例する。このため、上記の変換式は、輝度の安定した光源を撮影するときの露光時間をT0とすると、例えば以下の(13)式で表される。
【数13】
上記(13)式中の係数α,β,γ,及びT0が、上述の輝度変換特性パラメータとして用いられる。尚、(13)式中の係数βは、画像入力装置20が産業用である場合には値が「1」である。
【0052】
ノイズ特性パラメータは、画像入力装置20の光ショットノイズや暗電流の影響を除去するためのパラメータである。ここで、光ショットノイズは、一般的に信号量の平方根に比例するとされ、画像データの画素値が大きいほど大きくなる。このノイズ特性パラメータとしては、例えば予め輝度の安定した光源(例えば、積分球等を備える光源)の輝度を変化させながら画像入力装置20で光源を撮影して画像データを得ておき、画像データの階調ばらつきの特性をもとに作成した変換テーブルの値、或いは、変換式の係数が用いられる。
【0053】
上記の変換式は、ノイズによるばらつき量をNとし、画像データの階調をVとすると、例えば以下の(14)式で表される。
【数14】
上記(14)式中の係数a,b,cが、ノイズ特性パラメータとして用いられる。
【0054】
実寸変換パラメータは、観察条件データD12に含まれる観察視距離パラメータとともに、MTF特性を決定付ける観察視角を設定するためのパラメータである。実寸変換パラメータは、画像入力装置20で撮影される画像の寸法を、紙P上における実寸法に変換するために用いられるパラメータであり、例えば画像入力装置20が備える撮像装置22の1画素で撮影することができる紙P上における大きさを示す値が用いられる。この実寸変換パラメータは、画像入力装置20の設置条件の違いや器差の影響を排除するために用いられる。
【0055】
観察条件データD12に含まれる観察視距離パラメータは、検査対象物としての紙Pを観察する距離(視距離)を規定するパラメータであり、任意の値を規定することができる。この観察視距離パラメータは、あたかも人間がその視距離から検査対象物としての紙Pを観察している観察条件を設定するためのものである。ここで、視距離が変わると視角が変わるため、人間が感じる地合の目立ち度合も変化する。算出される地合指数(目立ち度合)の客観性を維持するため、観察視距離パラメータは、検査対処物の種類毎、製紙ライン毎、事業所毎、或いは企業毎に固定され、更には業界内で固定されているのが望ましい。
【0056】
観察輝度パラメータは、検査対象物としての紙Pを観察する輝度を規定するパラメータであり、任意の値を規定することができる。この観察輝度パラメータは、紙Pの種類や装置の種類によらず、透過光量が予め定められた基準光量(基準輝度)に調整された状態で紙Pを観察した際の目立ち度合を算出するためのものである。ここで、紙Pの種類による透過率の違いがある場合、或いは、装置による光量の違い等がある場合には、人間が感じる地合の目立ち度合も変化する。このため、算出される地合指数(目立ち度合)の客観性を維持するため、観察輝度パラメータは、検査対処物の種類毎、製紙ライン毎、事業所毎、或いは企業毎に固定され、更には業界内で固定されているのが望ましい。
【0057】
測定領域設定部41は、記憶部33に記憶された画像データD1を読み出し、読み出した画像データD1で示される画像に対して地合指数DXを算出する領域を設定する。具体的には、記憶部33から読み出した画像データD1で示される画像から検査対象物としての紙Pが撮影されている領域を抽出し、この抽出した領域に対して地合指数DXを算出する領域(以下、検査領域という)を設定する。
【0058】
画像補正部42は、測定領域設定部41によって検査領域が設定された画像データに重畳しているノイズを除去する。例えば、画像データに重畳している高周波ノイズの除去、照明装置10や画像入力装置20の光学特性に起因する照度ムラや画像入力装置20の開口特性に起因する低周波のシェーディングの除去を行って、ノイズが除去された補正画像データを出力する。
【0059】
具体的に、画像補正部42は、検査制御部35から出力される画像入力条件データD11に含まれるノイズ特性パラメータから、画像入力装置20の光ショットノイズや暗電流等に起因する高周波ノイズを除去したノイズ補正画像データINCを生成する。例えば、画像データD1のうちの検査領域内におけるデータ(以下、原画像データIOという)に対して3×3画素のサイズで移動平均処理を行うことにより平均画像データIOAを求め、前述した(14)式を用いて平均画像データIOAの画素毎のノイズ量を示す高周波ノイズ量画像INを生成する。そして、原画像データIOと平均画像データIOAとの画素毎の差分を求め、この差分の値が上記の高周波ノイズ量画像INより小さい場合にはその差分をノイズとみなして平均画像データIOAの値を真の値とし、上記の高周波ノイズ量画像INより大きい場合には原画像データIOから高周波ノイズ量画像INを取り除いた値を真の値とすることでノイズ補正画像データINCを生成する。
【0060】
次いで、画像補正部42は、上記のノイズ補正画像データINCに対し、移動平均処理やFFT演算、光学シミュレーション等によりシェーディング画像データISと、シェーディング画像データISの基準領域の値VBを取得し、例えば以下の(15)式に示す演算式を用いてシェーディング補正データICを生成する。ここで、基準領域の値VBとしては、例えばシェーディング画像データISの画像中心の値、或いは、画像中心を含む領域の平均値若しくは最大値を用いる。上記のシェーディング補正データICが、画像補正部42から補正画像データとして出力される。
【数15】
【0061】
地合指数算出部43は、輝度変換部51(変換手段)、観察輝度変換部52(調整手段)、局所サイズ算出部53、局所領域設定部54(設定手段)、FFT演算部55(第1演算手段)、MTF演算部56、局所地合指数演算部57(第2演算手段)、地合分布画像生成部58、及び地合分布統計演算部59(統計演算手段)を備える。かかる構成の地合指数算出部43は、検査制御部35から出力される画像入力条件データD11及び観察条件データD12を用いて、画像補正部42から出力される補正画像データから地合指数DXを算出する。
【0062】
輝度変換部51は、画像入力条件データD11に含まれる輝度変換特性パラメータ及び露光時間パラメータを用いて、画像補正部42からの補正画像データを物理量としての輝度値(例えば、単位が[cd/m2]である輝度値)を示す輝度画像データに変換する。具体的には、輝度変換特性パラメータ(α,β,γ,T0)及び露光時間パラメータ(T)を(13)式にそれぞれ代入するとともに、画像補正部42から出力される補正画像データIC(各画素の階調値)を(13)式の変数Vに代入して各画素の入力輝度Lを求めることにより、補正画像データICを輝度画像データILに変換する。
【0063】
観察輝度変換部52は、観察条件データD12に含まれる観察輝度パラメータを用いて、輝度変換部51からの輝度画像データILを観察輝度画像データILSに変換する。ここで、観察輝度画像データILSは、透過光量が予め定められた基準光量に調整された状態で紙Pを観察したときの輝度を示すデータである。かかる変換処理を行うのは、紙Pの種類や装置の種類によらずに、紙Pの地合の客観的な検査を実現するためである。
【0064】
具体的に、観察輝度変換部52は、輝度変換部51からの輝度画像データILの平均輝度LAを算出し、輝度画像データIL、平均輝度LA、及び観察条件データD12に含まれる観察輝度パラメータLVを、例えば以下の(16)式に代入することにより観察輝度画像データILSを求める。
【数16】
【0065】
局所サイズ算出部53は、画像入力条件データD11に含まれる実寸変換パラメータと観察条件データD12に含まれる観察視距離パラメータとから、検査領域内に設定すべき局所領域の大きさを示す局所領域サイズRh,Rvと、局所領域の視角を示す局所領域視角dh,dvとを算出する。ここで、人間が紙Pを目視にて検査する場合には、例えば視角2°程度の限定された視野で紙Pを観察し、注視点を動かしながら紙Pの全体を検査する。上記の局所領域は、人間が行う検査と同様の検査を実現すべく設定される領域であって、人間の限定された視野で観察される領域に相当する領域である。
【0066】
具体的に、局所サイズ算出部53は、例えば画像入力条件データD11に含まれる実寸変換パラメータと観察条件データD12に含まれる観察視距離パラメータとを用いて、視角2°に相当する画素数を局所領域サイズRh,Rvとして算出する。ここで、局所領域サイズRh,Rvを画素数で表現すると、この局所領域サイズRh,Rvの大きさを有する局所領域の視角は2°からずれるのが殆どである。このため、局所サイズ算出部53は、画像入力条件データD11に含まれる実寸変換パラメータと観察条件データD12に含まれる観察視距離パラメータとを用いて、画素数で表現された局所領域サイズRh,Rvの大きさを有する局所領域の視角を局所領域視角dh,dvとして算出する。
【0067】
局所領域設定部54は、局所サイズ算出部53で算出される局所領域サイズRh,Rvを用いて検査領域内に局所領域を設定する。具体的には、例えば水平方向の大きさが局所領域サイズRhであって、垂直方向の大きさが局所領域サイズRvであり、隣接する局所領域の端部が重なり合うようにマトリクス状に配列された矩形形状の複数の局所領域を検査領域内に設定する。
【0068】
FFT演算部55は、空間周波数毎のコントラストを示すコントラスト分布画像Ci(第1データ)を算出する。具体的には、観察輝度変換部52で変換された観察輝度画像データILSから、局所領域設定部54で設定された1つの局所領域内のデータ(以下、局所領域観察輝度画像データILSiという)を抽出し、この局所領域観察輝度画像データILSiに対して二次元FFT演算を行ってパワースペクトル画像を求め、局所領域の大きさ(Rh×Rv)で除算することで正規化パワースペクトル画像を求める。そして、正規化パワースペクトル画像を、その中心点の値で除算することによって、コントラスト分布画像Ciを算出する。
【0069】
ここで、正規化パワースペクトル画像の中心点の値は、局所領域観察輝度画像データILSiが抽出された局所領域の平均輝度LAiを表す。このため、正規化パワースペクトル画像を、その中心点の値で除算すればコントラスト分布画像を求めることができる。尚、一般的に、FFT演算では、信号の不連続性により生成されるパワースペクトルに実際存在しない成分が出現する。このため、例えば赤池窓と呼ばれる窓関数を用いて補正しておくのが望ましい。
【0070】
MTF演算部56は、局所サイズ算出部53で設定された局所領域視角dh,dvとFFT演算部55で用いられる平均輝度LAiとを用いて、MTF画像M2i(第2データ)を生成する。このMTF画像M2iは、観察条件データD12に含まれる観察視距離パラメータ及び観察輝度パラメータで規定される観察条件で紙Pを観察した場合の空間周波数毎のコントラスト感度を示すものである。
【0071】
具体的に、MTF演算部56は、FFT演算部55で算出されるコントラスト分布画像で用いられている空間周波数fh,fvを局所領域視角dh,dvでそれぞれ除算することにより、単位が[サイクル数/視角]である空間周波数uh,uvに変換する。そして、この空間周波数uh,uv、FFT演算部55で用いられる平均輝度LAi、及び局所領域視角dh,dvを、例えば(11)式に代入することでMTF画像M2iを生成する。
【0072】
局所地合指数演算部57は、FFT演算部55で求められたコントラスト分布画像Ciと、MTF演算部56で求められたMTF画像M2iとを用いて局所地合指数Jiを算出する。具体的には、(12)式に示されている通り、コントラスト分布画像CiとMTF画像M2iとを空間周波数毎に乗算し、これにより得られた値を加算することによって、局所地合指数Jiを算出する。
【0073】
地合分布画像生成部58は、局所地合指数演算部57で算出される局所地合指数Jiから、局所地合指数Jiの二次元分布を示す地合分布画像を生成する。つまり、局所領域設定部54によって検査領域内に複数の局所領域が設定されており、FFT演算部55、MTF演算部56、及び局所地合指数演算部57によって局所領域の各々について局所地合指数Jiが求められることから、地合分布画像生成部58は、検査領域内における局所地合指数Jiの二次元分布を示す地合分布画像を生成する。
【0074】
地合分布統計演算部59は、地合分布画像生成部58で生成される局所地合指数Jiの二次元分布を示す地合分布画像に対して統計的演算を行って地合指数DXを求める。具体的に、地合分布統計演算部59は、例えば局所地合指数Jiの二次元分布を示す地合分布画像に対して平均化処理、最大値算出処理、標準偏差算出処理等を行い、これらの処理によって得られた値を地合指数DXとして求める。尚、局所領域設定部54によって検査領域内に1つの局所領域のみが設定された場合には、局所地合指数演算部57で算出された局所地合指数Jiが地合指数DXとなる。
【0075】
〈地合検査装置の動作〉
次に、上記構成の地合検査装置の動作について説明する。検査が開始されると、検査制御部35によって照明制御部31が制御され、照明装置10から検査対象物としての紙Pの裏面に対して照明光が照射される。紙Pに照射された照明光は、その一部が紙Pを透過し、残りが裏面で反射或いは散乱される。
【0076】
照明光が紙Pに照射されている間(紙Pを透過する一部の光がある間)の所定のタイミングで、画像入力装置20が備える撮像装置22によって紙Pの表面が撮影され、その画像の画像データが画像入力装置20から出力される。画像入力装置20から出力された画像データは、検査制御部35の制御によって画像取込部32に取り込まれて記憶部33に記憶される。
【0077】
画像データが記憶部33に記憶されると、検査制御部35から画像処理部34に対して画像入力条件データD11及び観察条件データD12が出力され、検査制御部35の制御の下で、記憶部33に記憶された画像データD1が画像処理部34に読み出されて地合指数DXを算出する処理が開始される。尚、ここでは、画像データが記憶部33に記憶されてから画像入力条件データD11及び観察条件データD12が検査制御部35から画像処理部34に出力されるとしているが、検査制御部35から画像処理部34に対する画像入力条件データD11及び観察条件データD12の出力は、検査開始前に予め行っていても良い。
【0078】
画像処理部34の処理が開始されると、まず記憶部33から読み出された画像データD1で示される画像から紙Pが撮影されている領域を抽出し、この抽出した領域に対して検査領域を設定する処理が測定領域設定部41で行われる。次に、検査領域が設定された画像データに重畳しているノイズを除去する処理が画像補正部42で行われ、前述した(15)式に示す演算式を用いて生成されたシェーディング補正データICが補正画像データとして地合指数算出部43に出力される。
【0079】
補正画像データが地合指数算出部43に入力されると、まず画像入力条件データD11に含まれる輝度変換特性パラメータ及び露光時間パラメータを用いて、補正画像データを物理量としての輝度値(例えば、単位が[cd/m2]である輝度値)を示す輝度画像データILに変換する処理が輝度変換部51で行われる。次いで、観察条件データD12に含まれる観察輝度パラメータを用いて、輝度変換部51からの輝度画像データILを観察輝度画像データILSに変換する処理が観察輝度変換部52で行われる。これにより、透過光量が予め定められた基準光量に調整された状態で紙Pを観察したときの輝度を示す観察輝度画像データILSが求められるため、紙Pの種類や装置の種類によらずに、紙Pの地合の客観的な検査が実現されることになる。
【0080】
観察輝度画像データILSが求められると、画像入力条件データD11に含まれる実寸変換パラメータと観察条件データD12に含まれる観察視距離パラメータとから、検査領域内に設定すべき局所領域の大きさを示す局所領域サイズRh,Rvと、局所領域の視角を示す局所領域視角dh,dvとを算出する処理が局所サイズ算出部53で行われる。そして、局所サイズ算出部53で算出される局所領域サイズRh,Rvを用いて検査領域内に局所領域を設定する処理が局所領域設定部54で行われる。
【0081】
以上の処理が終了すると、検査領域内に設定された局所領域に対して空間周波数毎のコントラストを示すコントラスト分布画像Ciを算出する処理がFFT演算部55で行われる(第1ステップ)。また、局所サイズ算出部53で設定された局所領域視角dh,dvとFFT演算部55で用いられる平均輝度LAiとを用いて、MTF画像M2iを生成する処理がMTF演算部56で行われる(第2ステップ)。
【0082】
そして、FFT演算部55で求められたコントラスト分布画像Ciと、MTF演算部56で求められたMTF画像M2iとを用いて局所地合指数Jiを算出する処理が局所地合指数演算部57で行われる(第3ステップ)。具体的には、前述した(12)式に示されている通り、FFT演算部55で求められたコントラスト分布画像Ciと、MTF演算部56で求められたMTF画像M2iとを空間周波数毎に乗算し、これにより得られた値を加算することによって、局所地合指数Jiが算出される。
【0083】
以上のFFT演算部55、MTF演算部56、及び局所地合指数演算部57の処理は、検査領域内に設定された局所領域の各々に対して行われる。ここで、これらFFT演算部55、MTF演算部56、及び局所地合指数演算部57の処理は、1つの局所領域毎に順次行っても良く、或いは、複数の局所領域について並行して行っても良い。複数の局所領域に対する処理を並行して行うことにより、局所地合指数Jiの算出に要する時間を短縮することができる。
【0084】
検査領域内に設定された全ての局所領域についての局所地合指数Jiが算出されると、地合分布画像生成部58によって局所地合指数Jiの二次元分布を示す地合分布画像が生成される。そして、地合分布統計演算部59において、局所地合指数Jiの二次元分布を示す地合分布画像に対して平均化処理、最大値算出処理、標準偏差算出処理等が行われ、これらの処理によって得られた値が地合指数DXとして求められる。
【0085】
以上の処理によって算出された地合指数DXは、画像処理部34から検査制御部35に出力され、地合指数DXに基づいて地合の良否が検査される。例えば、地合指数DXの値が1[JND]以上であって50[JND]以下である場合には検査結果が「良好」となり、地合指数DXの値が50[JND]よりも大である場合には検査結果が「不良」となる。このようにして得られた地合指数DX及び検査制御部35の検査結果は、検査結果出力部36に出力される。
【0086】
図7は、図28に示す画像(均一度及び平均輝度が同じであって粒度が異なる画像)から求められる局所地合指数の二次元分布を示す地合分布画像及び地合指数を示す図である。また、図8は、図29に示す画像(均一度及び粒度が同じであって平均輝度が異なる画像)から求められる局所地合指数の二次元分布を示す地合分布画像及び地合指数を示す図である。尚、図7,図8に示す地合分布画像及び地合指数は、図28,図29に示す画像に対し、画像高さの10倍の距離を観察視距離として求められたものである。また、図7,図8に示す地合分布画像は、所地合指数の値が大きいほど明るくなるように図示している。
【0087】
図28に示す画像の地合は、(c)に示す画像が最も良く、次いで(a)に示す画像が良く、(b)に示す画像が最も悪いと人間が目視にて認識することができるものであった。図7を参照すると、明部は、(c)に示す地合分布画像が最も少なく、次いで(a)に示す地合分布画像が少なく、(b)に示す地合分布画像が最も多い。また、地合指数は、(c)に示すものが最も小さく、次いで(a)に示すものが小さく、(b)に示すものが最も大きい。
【0088】
また、図29に示す画像の地合は、(a)に示す画像が最も良く、次いで(b)に示す画像が良く、(c)に示す画像が最も悪いと人間が目視にて認識することができるものであった。図8を参照すると、明部は、(a)に示す地合分布画像が最も少なく、次いで(b)に示す地合分布画像が少なく、(c)に示す地合分布画像が最も多い。また、地合指数は、(a)に示すものが最も小さく、次いで(b)に示すものが小さく、(c)に示すものが最も大きい。
【0089】
以上の通り、均一度及び平均輝度が同じであって粒度が異なる画像と、均一度及び粒度が同じであって平均輝度が異なる画像との双方の画像について、地合分布画像の明暗及び地合指数の値の大小が人間の目視による地合の感じ方と一致する。これは、本実施形態の地合検査装置1で紙を検査したときの検査結果が、人間(熟練の検査員)が目視で検査したときの検査結果と一致することを意味する。
【0090】
ここで、上述した実施形態では、画像処理部34に設けられた局所地合指数演算部57が、FFT演算部55で求められたコントラスト分布画像CiとMTF演算部56で求められたMTF画像M2iとを空間周波数毎に乗算し、これにより得られた値を加算することによって、局所地合指数Jiを算出するものを例に挙げて説明した。しかしながら、局所地合指数演算部57は、以下の(17)式に示す通り、重み付け演算を行って局所地合指数Jiを算出するものであっても良い。
【0091】
具体的には、コントラスト分布画像CiとMTF画像M2iとを空間周波数毎に乗算して得られた値のw乗(wは任意の実数)を演算して加算し、これにより得られた値の1/w乗値を求めて局所地合指数Jiとしてもよい。かかる重み付け演算を行うことで、地合指数の精度をより向上させることができる。
【数17】
尚、上記(17)式において、wの値を「1」にすれば、上述した実施形態で説明した処理と同様の処理(重み付け演算を行わずに局所地合指数Jiを算出する処理)が行われる。
【0092】
図9は、局所地合指数を算出する際に重み付け演算を行わない場合と重み付けを行った場合との効果の差を説明するための図であって、(a)は重み付け演算を行わない場合の効果を示す図であり、(b)は重み付け演算を行った場合の効果を示す図である。また、図10は、図9に示す効果の差を説明するために用いる地合パターンの一例を示す図である。図10(a)に示す地合パターンは、明暗が水平方向に正弦波状に変化する縞パターン(以下、正弦波状パターンという)であり、図10(b)に示す地合パターンは、形状が円形である塊状のパターン(以下、塊状パターンという)である。
【0093】
図9(a),(b)では、横軸に人間の目視による検査結果(実験値)をとり、縦軸に地合検査装置1の検査結果(予測値)をとっている。但し、人間の目視による検査から地合指数を直接求めるのは困難であるため、図10(a)に示す正弦波状パターンを、周波数(水平方向の明暗の数)や背景輝度を異ならせて目視にて観察し、或いは、図10(b)に示す塊状パターンを、大きさや背景輝度を異ならせて目視にて観察してJNDコントラストを求める実験を行い、この実験によって得られるJNDコントラスト[%]を横軸の「実験値」としている。
【0094】
また、以上の実験と同様の実験を地合検査装置1で行った場合には、算出される地合指数の値がほぼ「1」になって差が小さいため、重み付け演算の有無による効果を評価するのは難しい。このため、図9(a),(b)では、前述した(12)式から、コントラストC(図10(a)に示す正弦波状パターンや図10(b)に示す塊状パターンのコントラスト)を、地合指数J(重み付け演算を行わずに算出された地合指数、或いは、重み付け演算を行って算出された地合指数)で除算して得られるJNDコントラスト[%]を縦軸の「予測値」としている。
【0095】
図9(a)を参照すると、図10(a)に示す正弦波状パターンを観察した場合には、近似直線Q1の相関係数R2が「0.94」となって実験値と予測値との間に高い相関があることが分かる。しかしながら、図10(a)に示す正弦波状パターンを観察した場合に加え、図10(b)に示す塊状パターンを観察した場合を含めた際には、近似直線Q2の相関係数R2が「0.40」となって実験値と予測値との間に高い相関がないことが分かる。
【0096】
これに対し、図9(b)を参照すると、図10(a)に示す正弦波状パターンを観察した場合に加え、図10(b)に示す塊状パターンを観察した場合を含めた際でも、近似直線Q3の相関係数R2が「0.94」となり、観察するパターンの形状の違いに拘わらず、実験値と予測値との間に高い相関があることが分かる。尚、図9(b)に示す結果は、前述した(17)式中のwの値を「1.3」にした場合に得られたものである。このように、重み付け演算を行って地合指数を求めることにより、地合指数の精度をより向上させることができる。
【0097】
以上の通り、本実施形態では、FFT演算部55で算出されたコントラスト分布画像と、MTF演算部56で求められたMTF画像とを空間周波数毎に乗算し、これにより得られた値を加算することによって、実際に人間が紙Pを検査した際の地合の目立ち度合を反映させた地合指数DXを算出している。このため、人間の視覚と同様の粒度や明度に応じた地合の違いを検査することができる。これにより、例えば書類や電話等で地合指数を知らせるだけで、地合の程度を相手方に伝えることが可能になる。
【0098】
また、地合指数DXを算出するに当り、紙Pの種類や装置の種類によらず、透過光量を予め定められた基準光量(基準輝度)に調整しているため、検査条件等の違いに拘わらず地合指数を用いて客観的に検査することが可能になる。これにより、検査条件によらず安定した地合指数の算出が可能であるとともに、異なる製造ラインで製造される紙Pの地合を相互比較するといったことが可能になる。
【0099】
〔第2実施形態〕
図11は、本発明の第2実施形態による地合検査装置の構成を示すブロック図である。図11に示す通り、本実施形態の地合検査装置2は、図1に示す地合検査装置1と同様に、照明装置10、画像入力装置20、及び制御処理装置30を備えており、搬送方向Z1に搬送される紙P(検査対象物)を撮影して得られる画像データに対する画像処理を行い、この画像処理により得られる地合指数に基づいて紙Pの地合を検査するものである。
【0100】
但し、図1に示す地合検査装置1は、照明装置10に対し紙Pを挟んで反対側に画像入力装置20が配置されており、紙Pを透過した光による画像(透過光画像)から紙Pの地合を検査する透過光方式の地合検査装置であった。これに対し、本実施形態の地合検査装置2は、紙Pに対し、照明装置10と同じ側に画像入力装置20が配置されており、紙Pの表面で反射或いは散乱された光による画像(反射光画像)から紙Pの地合を検査する反射光方式の地合検査装置である。
【0101】
尚、本実施形態の地合検査装置2は、反射光画像から紙Pの地合を検査する点において図1に示す地合検査装置1と相違するだけであり、制御処理装置30の構成及び動作は図1に示す地合検査装置1と同様である。このため、地合検査装置2の構成及び動作の詳細な説明は省略する。本実施形態の地合検査装置2も、実際に人間が紙Pを検査した際の地合の目立ち度合を反映させた地合指数DXを算出しているため、人間の視覚と同様の粒度や明度に応じた地合の違いを検査することができる等の効果が得られる。
【0102】
〔第3実施形態〕
図12は、本発明の第3実施形態による地合検査装置の構成を示すブロック図である。図12に示す通り、本実施形態の地合検査装置3は、紙Pの表面側に配置された照明装置10a及び画像入力装置20a、紙Pの裏面側に配置された照明装置10b及び画像入力装置20b、並びに制御処理装置30を備えており、搬送方向Z1に搬送される紙P(検査対象物)の両面を撮影して得られる画像データの各々に対する画像処理を行い、この画像処理により得られる地合指数に基づいて紙Pの地合を両面同時に検査可能なものである。
【0103】
照明装置10a,10bは、図1に示す照明装置10が備える光源11及び光学素子12と同様の光源11a及び光学素子12a、光源11b及び光学素子12bをそれぞれ備える。画像入力装置20a,20bは、図1に示す画像入力装置20が備える光学素子21及び撮像装置22と同様の光学素子21a及び撮像装置22a、光学素子21b及び撮像装置22bをそれぞれ備える。
【0104】
制御処理装置30は、画像取込部32a,32b、記憶部33a,33b、画像処理部34a,34b、検査結果出力部36、照明制御部61、及び検査制御部62を備えており、紙Pに対する照明光の照射制御を行うとともに、画像入力装置20から出力される画像データに対する画像処理を行う。そして、画像処理により得られる地合指数を用いて紙Pの地合を検査し、その検査結果を出力する。
【0105】
画像取込部32a、記憶部33a、及び画像処理部34aは、図1に示す画像取込部32、記憶部33、及び画像処理部34と同様のものであり、検査制御部62の制御の下で、画像入力装置20aから出力される画像データの取り込み、記憶、及び画像処理をそれぞれ行う。画像取込部32b、記憶部33b、及び画像処理部34bも、図1に示す画像取込部32、記憶部33、及び画像処理部34と同様のものであり、検査制御部62の制御の下で、画像入力装置20bから出力される画像データの取り込み、記憶、及び画像処理をそれぞれ行う。
【0106】
照明制御部61は、検査制御部62の制御の下で、紙Pの表面及び裏面の各々に照射される照明光の光量制御や照射タイミングの制御(例えば、ストロボ発光のタイミング制御)等を行う。検査制御部62は、照明制御部61を制御して紙Pの表面及び裏面の各々に照射される照明光の光量制御を行い、画像取込部32a,32bを制御して画像データの取り込み制御を行い、画像処理部34a,34bを制御して画像処理の実行制御を行う。尚、画像処理部34a,34bで地合指数が算出された場合には、検査制御部62は、それらの地合指数や検査結果を検査結果出力部36に出力する。
【0107】
本実施形態の地合検査装置3は、紙Pの表面における反射光画像から紙Pの表面の地合を検査すると同時に、紙Pの裏面における反射光画像から紙Pの裏面の地合を検査すること(両面同時検査)が可能なものであるが、各々の反射光画像を示す画像データに対して制御処理装置30で行われる処理は、図1に示す地合検査装置1と同様である。このため、地合検査装置3の構成及び動作の詳細な説明は省略する。
【0108】
本実施形態の地合検査装置3も、実際に人間が紙Pを検査した際の地合の目立ち度合を反映させた地合指数DXを算出しているため、人間の視覚と同様の粒度や明度に応じた地合の違いを検査することができる等の効果が得られる。また、本実施形態の地合検査装置3は、紙Pの表面の地合と裏面の地合とを切り分けることができるため、例えば表面及び裏面の地合の分布や搬送方向Z1のトレンドを解析することで、紙Pの表面側と裏面側との管理を個別に行うことができる。
【0109】
〔第4実施形態〕
図13は、本発明の第4実施形態による地合検査装置の構成を示すブロック図である。図13に示す通り、本実施形態の地合検査装置4は、紙Pを挟むように配置された照明装置10a,10b、紙Pの表面側に配置された画像入力装置20、及び制御処理装置30を備える構成である。尚、画像入力装置20は、紙Pの表面側に配置されていてもよく、紙の裏面側に配置されていても良い。
【0110】
つまり、本実施形態の地合検査装置4は、第1実施形態の地合検査装置1と第2実施形態の地合検査装置2とをいわば組み合わせた構成をしており、搬送方向Z1に搬送される紙P(検査対象物)の透過地合と反射地合との検査が可能である。但し、第1,第2実施形態による地合検査装置1,2に設けられる照明制御部31は、1つの照明装置10の制御を行うものであったが、本実施形態の地合検査装置4に設けられる照明制御部31は、第3実施形態の地合検査装置3に設けられる照明制御部61と同様に、2つの照明装置10a,10bの制御を行う点が相違する。
【0111】
本実施形態の地合検査装置4は、紙Pを挟むように照明装置10a,10bを配置しているため、例えば照明装置10a,10bの発光タイミングを異ならせることによって、画像入力装置20からは、透過光画像の画像データと反射光画像の画像データとが別々に出力される。このため、これら透過光画像の画像データと反射光画像の画像データとに対し、第1,第2実施形態と同様の画像処理を施せば、紙Pの透過地合と反射地合とを検査することができる。
【0112】
尚、本実施形態の地合検査装置4は、透過地合及び反射地合の双方の検査が可能である点において第1,第2実施形態の地合検査装置1,2と相違するものの、制御処理装置30で行われる具体的な画像処理は地合検査装置1,2と同様である。このため、地合検査装置4で行われる画像処理の詳細な説明は省略する。本実施形態の地合検査装置4も、実際に人間が紙Pを検査した際の地合の目立ち度合を反映させた地合指数DXを算出しているため、人間の視覚と同様の粒度や明度に応じた地合の違いを検査することができる等の効果が得られる。
【0113】
〔第5実施形態〕
図14は、本発明の第5実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。図14に示す通り、画像処理部34は、測定領域設定部41、画像補正部42、及び地合指数算出部43に加えて、地合劣化領域抽出部71と欠陥判定部72とを備える構成であり、地合指数DXの算出に加えて紙Pの欠陥検出を可能とするものである。この図14に示す画像処理部34は、図1に示す透過光方式の地合検査装置1、図11に示す反射光方式の地合検査装置2、図12に示す両面同時検査が可能な地合検査装置3、及び図13に示す透過方式・反射方式の検査が可能な地合検査装置4の何れにも適用することができる。
【0114】
地合劣化領域抽出部71は、地合分布画像生成部58で生成される地合分布画像に対して閾値を設定し、局所地合指数が閾値よりも大きくなる領域と、局所地合指数が閾値以下となる領域とを二値化処理等により抽出する。尚、地合劣化領域抽出部71は、抽出した領域に対してラベリング処理等を行ってラベル付けを行う。
【0115】
欠陥判定部72は、地合劣化領域抽出部71で抽出された各領域に対応する領域を観察輝度変換部52で生成された観察輝度変換画像から切り出して判定使用画像とし、この判定使用画像の特性を評価して欠陥領域、欠陥種類を判定する。尚、判定に使用する画像としては、観察輝度変換画像に代えて画像補正部42で生成される補正画像や輝度変換部51で生成される輝度画像を用いてもよい。
【0116】
ここで、欠陥領域は、判定使用画像の平均値からの乖離が大きな領域とみなすことができる。このため、欠陥判定部72は、例えば判定使用画像の平均値を算出し、その平均値より高い領域、或いは低い領域を抽出することで欠陥領域であるか否かの判定を行う。また、欠陥判定部72は、抽出した領域が平均値に対して高い領域であるか、或いは低い領域であるかによって明欠陥か暗欠陥かを分類する。更には、抽出した領域が点状であるか、或いはスジ状であるか等をフィルタリング処理や学習により判断することで欠陥種類を判定する。
【0117】
上記構成において、記憶部33に記憶された画像データD1が読み出されて画像処理部34に入力されると、第1実施形態と同様の処理が行われて地合指数DXが算出される。具体的には、例えばFFT演算部55で局所領域毎のコントラスト分布画像を算出する処理が行われるとともに、MTF演算部56で局所領域毎のMTF画像を生成する処理が行われる。そして、これらコントラスト分布画像とMTF画像とから局所領域毎の局所地合指数を算出する処理が地合指数演算部57で行われ、局所地合指数の二次元分布を示す地合分布画像を生成する処理が地合分布画像生成部58で行われる
【0118】
地合分布画像生成部58で地合分布画像が生成されると、地合劣化領域抽出部71に入力されて、所定の閾値を用いた二値化処理等が行われて局所地合指数が閾値よりも大きくなる領域と局所地合指数が閾値以下となる領域とが抽出される。次いで、観察輝度変換部52で生成された観察輝度変換画像から、地合劣化領域抽出部71で抽出された各領域に対応する領域が判定使用画像として切り出され、欠陥判定部72で欠陥領域、欠陥種類が判定される。
【0119】
以上の通り、本実施形態では、目立ち度合を反映させた局所地合指数の二次元分布を示す地合分布画像を用いて局所地合指数が閾値よりも大きくなる領域と、局所地合指数が閾値以下となる領域とを二値化処理等により抽出し、この抽出された領域に対応する領域が観察輝度変換画像から判定使用用画像として切り出して欠陥領域、欠陥種類を判定している。このため、欠陥の形状によらず、人間が観察した際に目立つ領域を欠陥として検出することができるため、想定外の欠陥形状の検出が可能になる。
【0120】
〔第6実施形態〕
図15は、本発明の第6実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。図15に示す通り、画像処理部34は、測定領域設定部41、画像補正部42、及び地合指数算出部80を備える構成であり、検査制御部35等から出力される画像入力条件データD11及び観察条件データD12並びにクラス別解析条件データD21を用いて、地合指数DXに加えてクラス毎の地合指数DXnを算出する。尚、クラスの総数をKとすると、変数nは1≦n≦Kを満たす整数である。
【0121】
この図15に示す画像処理部34は、図1に示す透過光方式の地合検査装置1、図11に示す反射光方式の地合検査装置2、図12に示す両面同時検査が可能な地合検査装置3、及び図13に示す透過方式・反射方式の検査が可能な地合検査装置4の何れにも適用することができる。
【0122】
ここで、前述した第1〜第5実施形態では、実際に人間が紙Pを検査した際の地合の目立ち度合を反映させた地合指数DXの算出を行っているため、人間の視覚と同様の粒度や明度に応じた地合の違いを検査することは可能である。しかしながら、地合指数DXだけでは地合の目立ち方の種類やその発生原因を特定することができず、地合の改善を図るための情報としては不十分な場合がある。例えば、紙P上に周囲とは地合が異なる領域が存在している場合に、地合指数DXを用いればその領域を検出することはできるものの、地合の違いが生ずる具体的な原因(その領域に小さな黒点が多数集まっていること、或いは、紙Pに生じている大きなムラによるものであること等)を特定することはできない場合である。
【0123】
そこで、本実施形態では、局所地合指数演算部57で得られる乗算結果(FFT演算部55で求められるコントラスト分布画像CiとMTF演算部56で求められるMTF画像M2iとの空間周波数毎の乗算結果:第3データ)を複数のクラスに分類してクラス毎の地合指数DXnを算出し、地合指数DXとクラス毎の地合指数DXnを用いることで、地合の目立ち方の種類やその発生原因の特定を容易にすることとしている。上記のクラスの分類法としては、二次元の周波数空間(水平方向の空間周波数uhと垂直方向の空間周波数uvとで表現された図4等に示す周波数空間)を周波数毎或いは方向毎に複数の領域に分類する分類法や重み付けに応じた分類法が挙げられる。
【0124】
図16は、本発明の第6実施形態におけるクラスの分類法の一例を示す図である。図16(a)に示す例では、二次元の周波数空間が同心の8個のリング状の領域(クラスC1〜C8)に分類されている。二次元の周波数空間は、中心部分に直流成分が配置され、中心部分から離れるにつれてより周波数の高い成分が配置される。このため、図16(a)に示す分類を行うことにより、二次元の周波数空間の周波数成分を周波数毎に分類することが可能になる。
【0125】
クラス別解析条件データD21は、上記のクラスの分類を規定するデータであり、画像入力条件データD11及び観察条件データD12とともに、検査制御部35等から出力される。具体的に、クラス別解析条件データD21は、局所地合指数演算部57で得られる空間周波数毎の乗算結果に対する重み付けを規定する周波数重みデータWnを含むデータである。具体的に、図16(a)に示す分類がなされる場合には、クラスの各々について、内部では値が「1」であり、外部では値が「0」である二値の周波数重みデータWnが規定される。例えば、クラスC2に着目すると、図16(b)に示す通り、その内部(斜線が付されていない部分)は値が「1」であり、その外部(斜線が付された部分)は値が「0」である周波数重みデータWnが規定される。この周波数重みデータWnは任意の値を規定することができるが、全てのクラスについての値の総和が「1」となるように設定するのが望ましい。
【0126】
尚、クラスの分類法としては、図16に示すリング状の領域に分類する方法以外に、二次元の周波数空間を方向に応じて放射状の領域に分類する方法も考えられる。このような分類を行う場合には、二次元の周波数空間における中心部分(直流成分が配置される部分)の近傍では周辺部分(高い成分が配置される部分)に比べて角度解像度が悪くなる。このような場合には、角度解像度が悪い中心部分に対しては値が小さく、周辺部分に行くにつれて値が徐々に大きくなる周波数重みデータWnを用いるのが望ましい。
【0127】
画像処理部34の地合指数算出部80は、図6,図14に示す輝度変換部51〜地合分布統計演算部59に加えて、クラス別局所地合指数演算部81n(第3演算手段,第4演算手段)、クラス別地合分布画像生成部82n、及びクラス別地合分布統計演算部83nを備える。尚、図15においては、理解を容易にするために、局所地合指数演算部57が乗算部57aと加算部57bとを備える構成にしている。乗算部57aは、FFT演算部55で求められるコントラスト分布画像CiとMTF演算部56で求められるMTF画像M2iとを空間周波数毎に乗算する構成を示しており、加算部57bは、乗算部57aにより得られた値を加算して局所地合指数Jiを求める構成を示している。
【0128】
クラス別局所地合指数演算部81nは、クラス別解析条件データD21に基づいて、クラス毎の局所地合指数であるクラス別局所地合指数Jniを算出する。具体的には、局所地合指数演算部57の乗算部57aで求められた空間周波数毎の乗算結果(Ci・M2i:第3データ)に対してクラス別解析条件データD21に規定される周波数重みデータWnを乗算し、これにより得られた値を加算することによってクラス別局所地合指数Jniを算出する。
【0129】
尚、クラス別局所地合指数演算部81nは、局所地合指数演算部57と同様に、重み付け演算を行ってクラス別局所地合指数Jniを算出するものであっても良い。具体的には、以下の(18)式に示す通り、コントラスト分布画像CiとMTF画像M2iとの空間周波数毎の乗算結果に周波数重みデータWnを乗算して得られた値のw乗(wは任意の実数)を演算して加算し、これにより得られた値の1/w乗値を求めてクラス別局所地合指数Jniとしてもよい。
【数18】
以上の重み付け演算を行うことで、クラス別地合指数の精度をより向上させることができる。
【0130】
クラス別地合分布画像生成部82nは、クラス別解析条件データD21に基づいて、クラス別局所地合指数演算部81nで算出されるクラス別局所地合指数Jniから、クラス別局所地合指数Jniの二次元分布を示すクラス別地合分布画像をそれぞれ生成する。つまり、FFT演算部55、MTF演算部56、及び局所地合指数演算部57によって局所地合指数Jiが複数の局所領域(局所領域設定部54によって検査領域内に設定された局所領域)の各々について求められるのと同様に、クラス別地合分布画像生成部82nは、検査領域内におけるクラス別局所地合指数Jniの二次元分布を示す地合分布画像をそれぞれ生成する。
【0131】
クラス別地合分布統計演算部83nは、クラス別解析条件データD21に基づいて、クラス別地合分布画像生成部82nで生成されるクラス別局所地合指数Jniの二次元分布を示す地合分布画像に対して統計的演算を行ってクラス別地合指数DXnをそれぞれ求める。具体的に、クラス別地合分布統計演算部83nは、例えばクラス別局所地合指数Jniの二次元分布を示す地合分布画像に対して平均化処理、最大値算出処理、標準偏差算出処理等を行い、これらの処理によって得られた値をクラス別地合指数DXnとしてそれぞれ求める。尚、局所領域設定部54によって検査領域内に1つの局所領域のみが設定された場合には、クラス別局所地合指数演算部81nで算出されたクラス別局所地合指数Jniがクラス別地合指数DXnとなる。
【0132】
上記構成の地合検査装置においては、画像処理部34の測定領域設定部41、画像補正部42、及び地合指数算出部80に設けられた輝度変換部51〜地合分布統計演算部59で第1実施形態と同様の処理が行われて地合指数DXが算出される。かかる処理と並行して、局所地合指数演算部57の乗算部57aで求められた空間周波数毎の乗算結果がクラス別局所地合指数演算部81nに出力されてクラス別局所地合指数Jniが算出される。
【0133】
具体的には、局所地合指数演算部57の乗算部57aで求められた空間周波数毎の乗算結果に対し、クラス別解析条件データD21に規定される周波数重みデータWnがクラス毎に乗算され、これにより得られた値がクラス毎に加算されることによってクラス別局所地合指数Jniが算出される。尚、クラス別局所地合指数演算部81nの処理は、局所地合指数演算部57の処理と同様に、局所領域設定部54で設定された検査領域内における局所領域の各々に対して行われる。
【0134】
検査領域内に設定された全ての局所領域について、クラス別局所地合指数Jniが算出されると、クラス別地合分布画像生成部82nによってクラス別局所地合指数Jniの二次元分布を示す地合分布画像がそれぞれ生成される。そして、クラス別地合分布統計演算部83nにおいて、クラス別局所地合指数Jniの二次元分布を示す地合分布画像に対して平均化処理、最大値算出処理、標準偏差算出処理等がそれぞれ行われ、これらの処理によって得られた値がクラス別地合指数DXnとして求められる。
【0135】
図17は、本発明の第6実施形態において観察した画像の一例を示す図である。また、図18は、図17に示す画像から求められる地合分布画像を示す図であり、図19は、図17に示す画像から求められるクラス別地合分布画像を示す図である。尚、図19(a)〜(h)は、クラスC1〜C8についてのクラス別地合分布画像をそれぞれ示している。
【0136】
図17に示す画像は、左上部分E1に大きなムラが存在し、右下部分E2に小さな黒点が存在する画像である。この図17に示す画像が本実施形態の地合検査装置に入力されると、地合分布画像生成部58において図18に示す地合分布画像が求められる。図18を参照すると、図17において大きなムラが存在している左上部分E1に対応する左上部分E11、及び、図17において小さな黒点が存在している右下部分E2に対応する右下部分E12の双方の地合指数が高いことを示す白丸部が現れており、両者を区別することは困難である。
【0137】
これに対し、図19を参照すると、図19(a),(b)に示されているクラスC1,C2のクラス別地合分布画像では、右下部分E12に明確な白丸が現れているが、左上部分E11に明確な白丸が現れているとは言い難い。これとは逆に、図19(f)〜(h)に示されているクラスC6〜C8のクラス別地合分布画像では、左上部分E11に明確な白丸が現れているが、右上部分E12に明確な白丸が現れているとは言い難い。尚、図19では図示を省略しているが、これらのクラス別地合分布画像からは、互いに値が異なるクラス別地合指数DX1〜DX8が求められることになる。このように、地合指数DXだけでは地合の目立ち方の種類やその発生原因の特定が困難であっても、クラス毎の地合指数DXnを算出して評価することにより、目立ち方の種類やその発生原因の特定が容易になる。
【0138】
図20は、本発明の第6実施形態で観察を行った複数の画像を示す図である。また、図21は、図20に示す画像の各々から求められるクラス別地合指数を示す図であって、(a)はクラス別地合指数DXnそのものを示す図であり、(b)はクラス別地合指数DXnを地合指数DXで除算した値を示す図である。尚、図21においては、図16に示すクラスの分類と同様の分類を行っているため、クラスC1に向かうほど高周波成分になり、クラスC9にむかうほど低周波成分になる。また、図21(a),(b)における凡例「a」〜「g」は、それぞれ図20(a)〜(g)に示す画像から得られたクラス別地合指数であることを示している。
【0139】
図20を参照すると、図20(a),(b)は、粒状の地合(細かなフロック)を観察した場合に得られる画像であり、図20(c),(e),(f)は、雲状の地合(大きなフロック)を観察した場合に得られる画像である。図21(a)を参照すると、図20(a)〜(g)に示される画像のうち、雲状の地合が最も大きな図20(f)の画像を観察した場合には、図20(f)の画像以外の他の画像を観察した場合よりも、飛び抜けて値が大きなクラス別地合指数DXnが得られることが分かる。
【0140】
また、図21(b)を参照すると、粒状の地合を観察した場合(例えば、図20(a),(b)に示される画像を観察した場合)には、高周波のクラス(例えば、クラスC1やクラスC2)の値が大きくなる傾向がある。これに対し、雲状の地合を観察した場合(例えば、図20(c),(e),(f)に示される画像を観察した場合)には、低周波のクラス(例えば、クラスC5やクラスC6)の値が大きくなる傾向がある。このため、クラス別地合指数DXnを参照することにより、検査対象物の地合の形状(粒度)を直感的に判断することができる。
【0141】
〔第7実施形態〕
図22は、本発明の第7実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。この図22に示す画像処理部34は、図15に示す画像処理部34と同様に、図1に示す透過光方式の地合検査装置1、図11に示す反射光方式の地合検査装置2、図12に示す両面同時検査が可能な地合検査装置3、及び図13に示す透過方式・反射方式の検査が可能な地合検査装置4の何れにも適用することができる。
【0142】
図22に示す通り、画像処理部34は、図15に示す画像処理部34と同様に、測定領域設定部41、画像補正部42、及び地合指数算出部80を備える構成である。但し、図1に示す画像処理部34では、乗算部57aの乗算結果が加算部57bとクラス別局所地合指数演算部81nとに出力され、クラス別局所地合指数演算部81nの演算結果がクラス別地合分布画像生成部82nのみに出力されていたのに対し、図22に示す画像処理部34では、乗算部57aの乗算結果がクラス別局所地合指数演算部81nのみに出力され、クラス別局所地合指数演算部81nの演算結果がクラス別地合分布画像生成部82nと加算部57bとに出力される点が相違する。
【0143】
以上の構成の相違は、図15に示す画像処理部34よりも地合指数DX及びクラス別地合指数DXnの算出に要する時間を短縮するためである。つまり、図15に示す画像処理部34では、乗算部57aの乗算結果を加算部57bで加算して局所地合指数Jiを求めるとともに乗算部57aの乗算結果をクラス毎に分類した上でクラス毎に加算してクラス別局所地合指数Jniを求めていた。ここで、図16を用いて説明した通り、二次元の周波数空間が重複しない領域のクラスに分類され、しかも各々のクラスについて規定される周波数重みデータWnが二値の値(例えば、値「0」と値「1」)をとる場合には、加算部57bで行われる加算処理とクラス別局所地合指数演算部81nで行われる加算処理は重複していると考えられる。本実施形態では、かかる重複した加算処理を省略することで、地合指数DX及びクラス別地合指数DXnを算出するのに要する時間の短縮を図っている。
【0144】
上記構成において、局所地合指数演算部57の乗算部57aで求められた空間周波数毎の乗算結果は、クラス別局所地合指数演算部81nに出力され、クラス別解析条件データD21に規定される周波数重みデータWnがクラス毎に乗算され、これにより得られた値がクラス毎に加算されることによってクラス別局所地合指数Jniが算出される。このクラス別局所地合指数Jniがクラス別地合分布画像生成部82nに出力されると、クラス別地合分布画像生成部82n及びクラス別地合分布統計演算部83nにおいて第6実施形態で説明した処理と同様の処理がそれぞれ行われてクラス別地合指数DXnが求められる。
【0145】
また、クラス別局所地合指数演算部81nで算出されたクラス別局所地合指数Jniは、局所地合指数演算部57の加算部57bに出力される。すると、加算部57bにおいて、全てのクラスのクラス別局所地合指数Jniを加算する処理が行われ、これにより地合指数Jiが算出される。このように、本実施形態では、クラス別局所地合指数演算部81nで算出されたクラス別局所地合指数Jniを加算して地合指数Jiを求めており、重複した加算処理(乗算部57aで求められた空間周波数毎の乗算結果を全て加算して地合指数Jiを求める処理)を省略することができるため、地合指数DX及びクラス別地合指数DXnを算出するのに要する時間を短縮することができる。
【0146】
〔第8実施形態〕
図23は、本発明の第8実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。図23に示す通り、画像処理部34は、測定領域設定部41、画像補正部42、及び地合指数算出部80に加えて、クラス別二値画像データ生成部91nとクラス影響度算出部92とを備える構成であり、地合指数DX及びクラス別地合指数DXnの算出に加えて、地合の目立ち方に対する各クラスの影響度の算出を可能とするものである。尚、各クラスの影響度を用いることによって、例えば紙Pの欠陥検出が可能となる。
【0147】
この図23に示す画像処理部34も、図15,図22に示す画像処理部34と同様に、図1に示す透過光方式の地合検査装置1、図11に示す反射光方式の地合検査装置2、図12に示す両面同時検査が可能な地合検査装置3、及び図13に示す透過方式・反射方式の検査が可能な地合検査装置4の何れにも適用することができる。
【0148】
クラス別二値画像データ生成部91nは、クラス別地合分布画像生成部82nで生成されるクラス別地合分布画像に対してそれぞれ閾値を設定し、例えばクラス別局所地合指数が閾値よりも大きくなる領域と、クラス別局所地合指数が閾値以下となる領域とを二値化処理等によりそれぞれ抽出する。そして、クラス毎に抽出した各々の領域を示すデータであるクラス別二値画像データをそれぞれ生成する。
【0149】
クラス影響度算出部92は、クラス別二値画像データ生成部91nで生成されるクラス別二値画像データとクラス別地合分布画像生成部82nで生成されるクラス別地合分布画像とから、地合の目立ち方に対する各クラスの影響度を算出する。具体的には、クラス別二値画像データ生成部91nで生成されるクラス別二値画像データをBnとし、クラス別地合分布画像生成部82nで生成されるクラス別地合分布画像をDnとすると、以下の(19)式から、地合の目立ち方に対する各クラスの影響度を示すクラス影響度判定画像Hを算出する。
【数19】
【0150】
上記構成において、記憶部33に記憶された画像データD1が読み出されて画像処理部34に入力されると、第6実施形態と同様の処理が行われて地合指数DX及びクラス別地合指数DXnが算出される。ここで、クラス別地合指数DXnの算出が行われる前に、クラス別地合分布画像生成部82nでクラス別局所地合指数の二次元分布を示すクラス別地合分布画像を生成する処理が行われる。
【0151】
クラス別地合分布画像生成部82nで生成されたクラス別地合分布画像は、クラス別二値画像データ生成部91nにそれぞれ入力され、所定の閾値を用いた二値化処理等が行われてクラス別二値画像データがそれぞれ生成される。次いで、クラス影響度算出部92において、クラス別地合分布画像生成部82nで生成されたクラス別地合分布画像と、クラス別二値画像データ生成部91nで生成されたクラス別二値画像データと用いて、上述した(19)式からクラス影響度判定画像Hを算出する処理が行われる。
【0152】
図24は、本発明の第8実施形態において求められるクラス影響度判定画像の一例を示す図である。尚、図24に示すクラス影響度判定画像は、図17に示す画像を観察して得られたものである。また、図24においては、各クラスにおける濃淡を示す凡例が画像の右側に付されている。図24を参照すると、例えば図17において大きなムラが存在している左上部分E1に対応する左上部分E11に現れる白丸は、その濃淡の度合からクラスC6,C7の影響度が大きいことが分かる。
【0153】
このように、本実施形態では、地合の目立ち方に対する各クラスの影響度を示すクラス影響度判定画像Hを算出しているため、地合の目立つ領域がどのクラスの影響を受けているのかを容易に判定することができる。尚、図24に示すクラス影響度判定画像に対して、第5実施形態で行われた欠陥領域、欠陥種類を判定する処理と同様の処理を行うことにより、本実施形形態においても紙Pの欠陥検出が可能になる。
【0154】
〔紙の製造工程〕
図25は、検査対象物としての紙の生産工程の概略を示す工程図である。図25に示す通り、紙の生産工程は、調合工程S1、フォーミング工程S2、プレス工程S3、ドライ工程S4、カレンダ工程S5、リール工程S6、及び裁断工程S7を有している。調合工程S1は紙の原料液を調合する工程であり、フォーミング工程S2は調合された紙原料液をヘッドボックスからワイヤ上或いは対のワイヤ間に噴出し、脱水機器により脱水して湿紙とする工程である。
【0155】
プレス工程S3は、フォーミング工程S2からの湿紙をフェルトにより圧搾する工程であり、ドライ工程S4は圧搾された湿紙を乾燥させる工程である。カレンダ工程S5は、乾燥された紙に対して紙厚や紙平滑等を調整する工程であり、リール工程S6は紙厚や紙平滑等が調整された紙を巻き取る工程である。裁断工程S7は、リール工程S6で巻き取られた紙を裁断する工程である。尚、リール工程S6で巻き取られた紙が製品として出荷される場合には、裁断工程S7は省略される。
【0156】
以上説明した第1〜第8実施形態による地合検査装置は、生産された製品を検査対象物としたオフライン装置として用いることも、図25に示す通り、生産工程における中間製品を検査対象物としたオンライン装置として用いることもできる。特に、オンライン装置として用いる場合には、図25中のフォーミング工程S2からリール工程S6までの各工程に設置することが可能である。
【0157】
第1〜第8実施形態による地合検査装置は何れも、検査領域内に局所領域を設定し、局所領域の各々で求められる局所地合指数の二次元分布を示す地合分布画像を生成している。このため、例えば、品質管理の観点からは、紙Pの地合のレベルに応じて裁断する領域を決定するといった裁断工程S7における支援効果が得られるとともに、悪い地合の領域を調合工程にリサイクルし、或いは市場に出さないようにすることで、原料費面での改善や出荷製品の品質を安定させる効果が得られる。また、第1〜第8実施形態による地合検査装置は何れも、裁断された製品の品質を地合のレベル毎に管理することができる。このため、裁断工程S6においては、地合のレベル毎に製品の用途を分類可能となる。
【0158】
また、制御管理の観点からは、例えば検査対象物の幅方向の各点における地合の変化のトレンドを解析して地合指数分布の経時変化を求め、地合領域の検査対象物の幅方向に対する顕在性や検査対象物の流れ方向に対する周期性を求めることで、品質を改善する効果が得られる。例えば、検査対象物の流れ方向に対する周期性を求め、前工程の調整対象を抽出し、その調整対象を調整(例えば、ヘッドボックスの速度調整や分布調整、各工程のローラの位置調整やローラ圧の調整等)することで、品質を改善する効果が得られ、地合指数を制御因子として活用することが可能になる。
【0159】
また、第6〜第8実施形態による地合検査装置は、地合指数DXに加えてクラス別地合指数DXnを算出している。このため、搬送される検査対象物を連続して測定すれば、クラス別地合指数DXnの経時変化を求めることができ、クラス別地合指数DXnの経時変化と抄紙工程の操業条件との関連性を容易に把握することができる。これにより、抄紙工程制御へのフィードバックやフィードバック手法の開発支援が可能になる。
【0160】
図26は、操業条件の変更に伴うクラス別地合指数DXnの変化例を示す図である。図26に示す例では、時刻t1で生じた操業条件の変更によってクラス別地合指数DXnが全体的に低下し、時刻t2で生じた操業条件の変更によってクラス別地合指数DXnが時刻t1以前の値と同程度まで上昇している。ここで、経験上、例えば調合工程S1では、ヘッドボックスの濃度増加によって雲状の地合(大きなフロック)が増大する反面、粒状の地合(細かなフロック)が減少するという傾向があり、フォーミング工程S2では、ヘッドボックスからの噴出速度の上昇によって中間的な周波数の強度が大きく変化する傾向があることが知られている。図26に示すクラス別地合指数DXnの経時変化を参照して調合工程S1やフォーミング工程S2の制御にフィードバックすれば、紙の地合を任意に制御することが可能になる。
【0161】
また、第6〜第8実施形態による地合検査装置で算出される地合指数DX及びクラス別地合指数DXnは何れも、検査対象物の目立ち度合(即ち、外観品質)である。このため、抄紙工程における各工程の前後(例えば、ドライ工程S4の前後、或いは、カレンダ工程S5の前後)で検査対象物の同じ位置を測定して比較評価することで、その工程の操業条件の外観品質に対する関連性をクラス毎に把握することができる。これにより、抄紙工程制御へのフィードバックやフィードバック手法の開発支援が可能になる。
【0162】
また、印刷工程においては、検査対象物の同じ位置を測定して比較評価することで、印刷条件の外観品質に対する影響をクラス毎に把握することができる。これにより、印刷される側である検査体対象物(例えば、紙)の特性と、印刷により添加される側(例えば、インク)との相性の分析を可能にし、印刷適性改善のための要因抽出を支援することができる。
【0163】
図27は、印刷前に求められた地合指数又はクラス別地合指数と印刷後に行われた目視評価の結果との相関を説明するための図であって、(a)は地合指数DXと目視評価の結果との相関を示す図であり、(b)はクラス別地合指数DXnと目視評価の結果との相関を示す図である。尚、図27(b)においては、図示を簡略化するために、クラスC3,C4,C9についてのクラス別地合指数DX3,DX4,DX9と目視評価の結果との相関のみを図示している。
【0164】
上記の印刷前における地合指数又はクラス別地合指数は、例えば印刷が行われていない無地の紙を本発明の第6〜第8実施形態による地合検査装置で検査して求めたものである。また、上記の印刷後における目視評価の結果は、地合検査装置で検査された上記の無地の紙に対して均一なグレースケール画像を印刷したものの善し悪しを検査員が目視で評価することにより得られるものである。この目視評価は「1」から「8」までの8段階評価であって、値が小さくなるほど良好な評価であり、値が大きくなるほど悪い評価である。
【0165】
まず、図27(a)を参照すると、地合検査装置で得られた地合指数DXと目視検査による結果との相関を示す近似曲線Q11の相関係数R2は「0.79」であり、高い相関があることが分かる。次に、図27(b)を参照すると、クラス別地合指数DX3と目視評価の結果との相関を示す近似曲線Q21の相関係数R2は「0.79」であり、クラス別地合指数DX4と目視評価の結果との相関を示す近似曲線Q22の相関係数R2は「0.81」であり、それぞれ高い相関があることが分かる。
【0166】
これに対し、クラス別地合指数DX9と目視評価の結果との相関を示す近似曲線Q23の相関係数R2は、「0」に近い値であるため殆ど相関が無いことが分かる。このように、印刷前に求められたクラス別地合指数DXnと印刷後に行われた目視評価の結果との相関が高いクラスと相関が低いクラスとを抽出することができ、印刷適性改善に資することが可能である。
【0167】
以上、本発明の実施形態による地合検査装置及び地合検査方法について説明したが、本発明は上記実施形態に制限される訳ではなく、本発明の範囲内で自由に変更が可能である。例えば、上述した地合検査装置が備える画像処理部34は、ハードウェアにより実現することもできるが、ソフトウェアにより実現することもできる。つまり、記録媒体に記録されたプログラム(画像処理部34の機能を実現するプログラム)を読み出してコンピュータにインストールし、或いは、インターネット等のネットワークを介して記録媒体に記録されたプログラムと同様のプログラムをダウンロードしてコンピュータにインストールすることにより、画像処理部34をソフトウェアにより実現できる。
【0168】
また、上記実施形態では、画像入力装置20から出力される画像データを処理して地合指数DXやクラス別地合指数DXnを求める地合検査装置について説明した。しかしながら、地合検査装置は、必ずしも画像入力装置20を備えている必要はない。例えば、検査すべき画像を地合検査装置とは別体の画像入力装置で撮像しておき、この画像入力装置で撮像された画像の画像データを地合検査装置で処理して地合指数DXやクラス別地合指数DXnを求めるようにしても良い。
【0169】
また、上記実施形態では、MTF演算部56が、局所サイズ算出部53で設定された局所領域視角dh,dvとFFT演算部55で用いられる平均輝度LAiとを用いて、MTF画像M2iを生成する例について説明した。しかしながら、MTF演算部56を省略して、検査制御部35から画像処理部34の局所地合指数演算部57に対し、MTF画像を出力するようにしてもよい。
【符号の説明】
【0170】
1〜4 地合検査装置
20 画像入力装置
51 輝度変換部
52 観察輝度変換部
54 局所領域設定部
55 FFT演算部
56 MTF演算部
57 局所地合指数演算部
59 地合分布統計演算部
81n クラス別局所地合指数演算部
DX 地合指数
P 紙
【技術分野】
【0001】
本発明は、紙や不織布等の薄いシート状の検査対象物の地合を検査する地合検査装置及び地合検査方法に関する。
【背景技術】
【0002】
紙や不織布等の薄いシート状の製品は、製造効率を高めつつ一定の品質を保持するために、水分、厚み、地合(繊維の分布状態)等が検査されながら製造されるのが一般的である。従来、製品に対してなされる検査の一つである地合の検査は、熟練の検査員による目視検査により行われていたが、近年では地合の自動的な検査を可能とする地合検査装置が開発されている。
【0003】
従来の地合検査装置は、検査対象物としての製品を撮影して得られる画像データに対して画像処理を行い、輝度の標準偏差、分散、平均値等から地合指数(地合を評価するために用いる指数)を求めて検査するものが一般的である。例えば、画像データに対して画像処理を施して輝度(製品の透過率や吸光度)の標準偏差と平均値とを求め、輝度の標準偏差を平均値で除算して均一度を求め、この均一度を地合指数にして製品の検査を行う。このような従来の地合検査装置の詳細については、例えば以下の特許文献1〜6を参照されたい。
【0004】
しかしながら、上記の地合指数には、粒度(繊維のムラによって生ずる明るい領域(暗い領域)の集まり具合を示す情報)が全く反映されていない。このため、上記の特許文献1〜6に開示された地合検査装置で得られる検査結果と熟練の検査員による検査結果との間に乖離が生ずる場合がある。そこで、地合指数に粒度を反映させて地合検査を行う地合検査装置も提案されている。
【0005】
具体的に、以下の特許文献7では、考慮すべき粒度と同程度の大きさを有する複数の領域に検査対象領域が区分されるよう画像データを処理し、区分した領域の各々の均一度を求めて地合指数とすることで、粒度を地合指数に反映させている。また、以下の特許文献8では、人間が地合を判定する際に敏感に感応すると考えられる周波数成分の存在割合を使用することで、粒度を地合指数に反映させている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第2692299号公報
【特許文献2】特許第2738066号公報
【特許文献3】特許第2751410号公報
【特許文献4】特許第2797474号公報
【特許文献5】特許第3227852号公報
【特許文献6】特開平06−050906号公報
【特許文献7】特開平11−281589号公報
【特許文献8】特開2000−009660号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、人間の視覚は、均一度及び平均輝度が同じであっても粒度が異なるもの、或いは、均一度及び粒度が同じであっても平均輝度が異なるものについては、地合が異なると認識することができる。図28は、均一度及び平均輝度が同じであって粒度が異なる画像を示す図であり、図29は、均一度及び粒度が同じであって平均輝度が異なる画像を示す図である。尚、図28では、(a),(b),(c)の順で粒度が大きくなる画像を示しており、図29では、(a),(b),(c)の順で平均輝度が高くなる画像を図示している。
【0008】
図28に示す例を参照すると、画像の地合は、(c)に示す画像が最も良く、次いで(a)に示す画像が良く、(b)に示す画像が最も悪いと認識することができる。また、図29に示す例を参照すると、画像の地合は、(a)に示す画像が最も良く、次いで(b)に示す画像が良く、(c)に示す画像が最も悪いと認識することができる。このように、人間の視覚は、粒度や明度(平均輝度)に応じた地合の違いを認識することができる。
【0009】
しかしながら、上述した特許文献1〜6に開示された地合検査装置は、均一度のみを地合指数として用いており、粒度が反映された地合指数を用いている訳ではない。このため、図28に示すような均一度及び平均輝度が同じであって粒度が異なる画像の違いを検出することができないという問題がある。また、上述した特許文献7,8に開示された地合検査装置は、均一度に加えて粒度が反映された地合指数を用いているが、明度が考慮された地合指数を用いている訳ではない。このため、図29に示すような均一度及び粒度が同じであって平均輝度が異なる画像の違いを検出することができないという問題がある。
【0010】
また、従来の地合検査装置で用いられている地合指数は統一されたものではなく、検査装置毎に異なるものが用いられている。例えば、ある地合検査装置では、地合が良好なものほど値が小さくなる地合指数を用いており、他の地合検査装置では、地合が良好なものほど値が大きくなる地合指数を用いているといった具合である。このため、地合検査装置の種類が異なってしまうと、同じ製品や検査対象物を検査したとしても異なる地合指数が得られてしまい、地合指数のみで地合を客観的に比較、評価することができないという問題がある。
【0011】
更に、同種の地合検査装置であっても、検査に用いられている装置及び機器の器差(例えば、照明装置、画像入力装置、光学部品等の器差)や検査条件の違い(例えば、照明条件や撮影条件の違い)があると、異なる地合指数が得られてしまう。このため、同種の地合検査装置を用いる場合であっても、器差の影響が無く、且つ、検査条件が厳密に同じで無ければ、地合指数のみで地合を客観的に比較、評価することができないという問題がある。
【0012】
本発明は上記事情に鑑みてなされたものであり、人間の視覚と同様の粒度や明度に応じた地合の違いを検査条件等の違いに拘わらず地合指数を用いて客観的に比較、評価することができる地合検査装置及び地合検査方法を提供することを目的とする。
【課題を解決するための手段】
【0013】
上記課題を解決するために、本発明の地合検査装置は、シート状の検査対象物(P)の一方面及び他方面の少なくとも一方が撮像された画像データに対する画像処理を行って求めた地合指数(DX)を用いて前記検査対象物の地合を検査する地合検査装置(1〜4)において、前記画像データに対してFFT演算を行って空間周波数毎のコントラストを示す第1データを得る第1演算手段(55)と、前記第1演算手段で得られた第1データと、前記画像の明度及び前記画像に対する観察視野を考慮した空間周波数毎のコントラスト感度を示す第2データとを、空間周波数毎に乗算して加算することにより前記地合指数を算出する第2演算手段(57)とを備えることを特徴としている。
この発明によると、シート状の検査対象物の画像を示す画像データに対してFFT演算が行われて空間周波数毎のコントラストを示す第1データが求められ、この第1データとシート状の検査対象物の画像の明度及び該画像に対する観察視野を考慮した空間周波数毎のコントラスト感度を示す第2データとが空間周波数毎に乗算されて加算されることによって地合指数が算出される。
また、本発明の地合検査装置は、前記第2演算手段が、前記第1演算手段で得られた第1データと前記第2データとを空間周波数毎に乗算して得られた値に対して所定の重み付けを行って加算することを特徴としている。
また、本発明の地合検査装置は、前記画像データを、前記画像の物理的な輝度を示す画像データに変換する変換手段(51)を備えることを特徴としている。
また、本発明の地合検査装置は、前記画像の物理的な輝度が予め設定された基準輝度となるように、前記変換手段で変換された画像データを調整する調整手段(52)を備えることを特徴としている。
また、本発明の地合検査装置は、前記変換手段で変換された画像データに対し、複数の局所領域を設定する設定手段(54)と、前記設定手段によって設定された局所領域毎に、前記第1,第2演算手段の各々による演算により求められた局所地合指数に対して所定の統計演算を行って前記地合指数を算出する統計演算手段(59)とを備えることを特徴としている。
また、本発明の地合検査装置は、前記第1データと前記第2データとを空間周波数毎に乗算することによって前記第2演算手段で得られる第3データを、予め規定された空間周波数の領域であるクラス毎に加算することにより、該クラス毎の地合指数を算出する第3演算手段(81n)を備えることを特徴としている。
ここで、本発明の地合検査装置は、前記第3演算手段が、前記第3データに対して前記クラス毎に規定された所定の重み付けを行って、前記クラス毎に加算することを特徴としている。
或いは、本発明の地合検査装置は、前記第1データと前記第2データとを空間周波数毎に乗算することによって前記第2演算手段で得られる第3データに対し、予め規定されたクラス毎に規定された重みデータを乗算して加算することにより、該クラス毎の地合指数を算出する第4演算手段(81n)を備えることを特徴としている。
ここで、本発明の地合検査装置は、前記第4演算手段が、前記第3データと前記重みデータとを乗算して得られる値に対して前記クラス毎に規定された所定の重み付けを行って、前記クラス毎に加算することを特徴としている。
本発明の地合検査方法は、シート状の検査対象物(P)の一方面及び他方面の少なくとも一方の画像を示す画像データを取得し、該画像データに対する画像処理を行って求めた地合指数(DX)を用いて前記検査対象物の地合を検査する地合検査方法であって、前記画像データに対してFFT演算を行って空間周波数毎のコントラストを示す第1データを得る第1ステップと、前記画像の明度及び前記画像に対する観察視野を考慮した空間周波数毎のコントラスト感度を示す第2データを得る第2ステップと、前記第1ステップで得られた第1データと前記第2ステップで得られた第2データとを、空間周波数毎に乗算して加算することにより前記地合指数を算出する第3ステップとを有することを特徴としている。
【発明の効果】
【0014】
本発明によれば、シート状の検査対象物の画像を示す画像データに対してFFT演算を行って空間周波数毎のコントラストを示す第1データを求め、この第1データとシート状の検査対象物の画像の明度及び該画像に対する観察視野を考慮した空間周波数毎のコントラスト感度を示す第2データとを空間周波数毎に乗算して加算することによって、実際に人間が検査対象物を検査した際の地合の目立ち度合を反映させた地合指数を算出している。このため、人間の視覚と同様の粒度や明度に応じた地合の違いを検査条件等の違いに拘わらず地合指数を用いて客観的に比較、評価することができるという効果がある。
【図面の簡単な説明】
【0015】
【図1】本発明の第1実施形態による地合検査装置の構成を示すブロック図である。
【図2】視覚のMTF特性を説明するための図である。
【図3】縞パターンの空間周波数とコントラスト感度との関係を示すMTF特性の一例を示す図である。
【図4】二次元のMTF特性の一例を示す図である。
【図5】異方性を考慮した二次元のMTF特性の一例を示す図である。
【図6】本発明の第1実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。
【図7】図28に示す画像から求められる局所地合指数の二次元分布を示す地合分布画像及び地合指数を示す図である。
【図8】図29に示す画像から求められる局所地合指数の二次元分布を示す地合分布画像及び地合指数を示す図である。
【図9】局所地合指数を算出する際に重み付け演算を行わない場合と重み付けを行った場合との効果の差を説明するための図である。
【図10】図9に示す効果の差を説明するために用いる地合パターンの一例を示す図である。
【図11】本発明の第2実施形態による地合検査装置の構成を示すブロック図である。
【図12】本発明の第3実施形態による地合検査装置の構成を示すブロック図である。
【図13】本発明の第4実施形態による地合検査装置の構成を示すブロック図である。
【図14】本発明の第5実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。
【図15】本発明の第6実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。
【図16】本発明の第6実施形態におけるクラスの分類法の一例を示す図である。
【図17】本発明の第6実施形態において観察した画像の一例を示す図である。
【図18】図17に示す画像から求められる地合分布画像を示す図である。
【図19】図17に示す画像から求められるクラス別地合分布画像を示す図である。
【図20】本発明の第6実施形態で観察を行った複数の画像を示す図である。
【図21】図20に示す画像の各々から求められるクラス別地合指数を示す図である。
【図22】本発明の第7実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。
【図23】本発明の第8実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。
【図24】本発明の第8実施形態において求められるクラス影響度判定画像の一例を示す図である。
【図25】検査対象物としての紙の生産工程の概略を示す工程図である。
【図26】操業条件の変更に伴うクラス別地合指数DXnの変化例を示す図である。
【図27】印刷前に求められた地合指数又はクラス別地合指数と印刷後に行われた目視評価の結果との相関を説明するための図である。
【図28】均一度及び平均輝度が同じであって粒度が異なる画像を示す図である。
【図29】均一度及び粒度が同じであって平均輝度が異なる画像を示す図である。
【発明を実施するための形態】
【0016】
以下、図面を参照して本発明の実施形態による地合検査装置及び地合検査方法について詳細に説明する。尚、以下では、理解を容易にするために、検査対象物が紙であるものとし、紙の地合を検査する地合検査装置及び地合検査方法を例に挙げて説明する。但し、本発明は、紙以外にも不織布等の薄いシート状の検査対象物の地合を検査する地合検査装置及び地合検査方法にも適用可能である。
【0017】
〔第1実施形態〕
〈地合検査装置の構成〉
図1は、本発明の第1実施形態による地合検査装置の構成を示すブロック図である。図1に示す通り、本実施形態の地合検査装置1は、照明装置10、画像入力装置20、及び制御処理装置30を備えており、搬送方向Z1に搬送される紙P(検査対象物)を撮影して得られる画像データに対する画像処理を行い、この画像処理により得られる地合指数に基づいて紙Pの地合を検査する。尚、本実施形態の地合検査装置1は、紙Pを透過した光による画像(透過光画像)から紙Pの地合を検査する透過光方式の地合検査装置である。
【0018】
照明装置10は、光源11及び光学素子12を備えており、紙Pの裏面側に配置されて、紙Pの裏面に対して照明光を照射する。光源11は、紙Pに照射すべき照明光(例えば、白色光)を射出する。この光源11としては、点光源、線光源、及び面光源の何れを用いることもできるが、点光源よりは線光源が望ましく、線光源よりは面光源が望ましい。また、紙Pが搬送方向Z1に高速で搬送される場合には、ストロボ発光する光源が望ましい。光学素子12は、例えばレンズ等であり、光源11から射出された照明光を紙Pの裏面に投射する。尚、この光学素子12は、不要であれば省略可能である。
【0019】
画像入力装置20は、光学素子21及び撮像装置22を備えており、紙Pの表面側に配置されて、紙Pの表面の画像を撮影して得られる画像(一次元画像又は二次元画像)の画像データを出力する。具体的に、画像入力装置20は、撮像装置22によって撮影される領域が、照明装置10によって照明光が照射される領域と紙Pを挟んで重なるように配置される。
【0020】
光学素子21は、例えばレンズ等であり、紙Pを透過した光(透過光)を撮像装置22に導く。撮像装置22は、フォトダイオード、CCD(Charge Coupled Device:電荷結合素子)、CMOS(Complementary Metal Oxide Semiconductor:相補型金属酸化膜半導体)等の撮像素子を備えており、撮影した画像の画像データを出力する。尚、撮像素子22は、一次元画像の画像データを出力するもの、二次元画像の画像データを出力するものの何れを用いることもできるが、本実施形態では二次元画像の画像データを出力するものを例に挙げて説明する。
【0021】
制御処理装置30は、照明制御部31、画像取込部32、記憶部33、画像処理部34、検査制御部35、及び検査結果出力部36を備えており、紙Pに対する照明光の照射制御を行うとともに、画像入力装置20から出力される画像データに対する画像処理を行う。そして、画像処理により得られる地合指数を用いて紙Pの地合を検査し、その検査結果を出力する。
【0022】
照明制御部31は、検査制御部35の制御の下で、紙Pに照射される照明光の光量制御や照射タイミングの制御(例えば、ストロボ発光のタイミング制御)等を行う。画像取込部32は、例えば画像ボード等であり、検査制御部35の制御の下で画像入力装置20から出力される画像データを取り込む。記憶部33は、例えば、RAM(Random Access Memory)等のメモリで実現され、画像取込部32で取り込まれた画像データを記憶する。
【0023】
画像処理部34は、検査制御部35の制御の下で、記憶部33に記憶された画像データを読み出して画像処理を行い、紙Pの地合を評価するための地合指数を算出する。ここで、画像処理部34で算出される地合指数は、実際に人間が紙Pを検査した際の地合の目立ち度合を反映させたものであり、人間の視覚の感知限界(JND:Just Noticeable Difference)を基準として定量的に表現したものである。尚、本実施形態で用いられる地合指数の詳細及び画像処理部34で行われる画像処理の詳細については後述する。
【0024】
検査制御部35は、制御処理装置30に設けられた各ブロックを制御することにより、地合検査装置1の動作を統括して制御する。具体的には、照明制御部31を制御して紙Pに照射される照明光の光量制御等を行い、画像取込部32を制御して画像データの取り込み制御を行う。また、画像処理部34を制御して画像処理の実行制御を行い、画像処理部34で算出された地合指数を用いた検査結果の出力を行う。検査結果出力部36は、例えばディスプレイ、データベースサーバ、レコーダ等に対し、地合指数の算出結果や地合指数を用いた紙Pの検査結果を出力する。
【0025】
〈地合指数の詳細〉
次に、本実施形態で用いられる地合指数の詳細について説明する。人間の視覚の感知限界(JND)を基準として地合指数を表現するために、本実施形態では、視覚の空間周波数感度特性、即ちMTF(Modulation Transfer Function)特性を利用する。図2は、視覚のMTF特性を説明するための図である。
【0026】
視覚のMTF特性とは、図2に示す通り、明暗が正弦波状に変化する縞パターンを人間が観察する際に、縞パターンの空間周波数とコントラスト感度との関係を示すものであり、別の呼び方で視覚系のコントラスト感度関数(CSF:Contrast Sensitivity Function)に相当するものである。ここで、コントラスト感度とは、明暗が正弦波状に変化する縞パターンを人間が観察する際に、感知することができる限界のコントラスト(以下、JNDコントラストという)の逆数をいう。
【0027】
いま、図2に示す通り、最大輝度がLMAXであり、最小輝度がLMINであり、背景輝度がLAである縞パターンを観察する場合を考える。かかる縞パターンを観察した場合に、人間が感知することができる限界の輝度差ΔLとすると、JNDコントラストCJNDは以下の(1)式で表され、コントラスト感度Mは以下の(2)式で表される。尚、背景輝度LA及び輝度差ΔLは、例えば以下の(3),(4)式でそれぞれ表される。
【0028】
【数1】
【数2】
【数3】
【数4】
【0029】
図3は、縞パターンの空間周波数とコントラスト感度との関係を示すMTF特性の一例を示す図である。図3(a)を参照すると、コントラスト感度は、観察する縞パターンの空間周波数に応じて変化し、ある空間周波数f0で最大となることが分かる。図28(a)〜(c)に示す画像(均一度及び平均輝度が同じであるが粒度が異なる画像)において、図28(b)に示す画像の地合が目立つように観察されるのは、このような空間周波数に応じたコントラスト感度の違いに起因する。
【0030】
ここで、MTF特性は、背景輝度(明度)や観察視角によっても変化する。図3(b)は、背景輝度を変化させたときのMTF特性を示す図であり、図3(c)は観察視角を変化させたときのMTF特性を示す図である。尚、図3(b)においては、グラフL14〜L11の順に背景輝度が高くなっており、図3(c)においては、グラフL24〜L21の順に観察視角が大きくなっている。
【0031】
図3(b)を参照すると、コントラスト感度は背景輝度が高いほど高くなることが分かる。これは、背景輝度が低い場合よりも高い場合の方が小さなコントラスト差を感知できることを意味する。また、コントラスト感度が最大になる周波数は背景輝度が高くなるにつれて高くなる傾向があることも分かる。図29(a)〜(c)に示す画像(均一度及び粒度が同じであるが平均輝度が異なる画像)において、図29(c)に示す画像の地合が目立つように観察されるのは、このような背景輝度に応じたコントラスト感度の違いに起因する。また、図3(c)を参照すると、コントラスト感度は観察視野が大きくなるほど高くなることが分かる。
【0032】
一般的に、視覚のMTF特性は、以下の(5)式に示すガウス関数Gで表される。
【数5】
但し、上記(5)式中の変数uは空間周波数であり、変数σはガウス関数Gの広がりを決める変数である。尚、空間周波数uの単位は、視角1°当りのサイクル数を示すcpd(cycle per degree:[サイクル数/視角])である。
【0033】
図3(b),図3(c)を用いて説明した通り、MTF特性(コントラスト感度)は、空間周波数uに応じて変化するだけではなく、背景輝度LAや観察視角dによっても変化する。このような空間周波数u以外にも背景輝度LAや観察視角dを考慮した一次元のMTF特性(コントラスト感度MB1)は、例えば以下の(6)式で表される。
【数6】
【0034】
但し、上記(6)式中の関数Xは、高周波でのコントラスト感度MB1の低下を表現する関数である。また、関数φ1は、コントラスト感度MB1が背景輝度LAの平方根に比例するという特性を示す関数であり、関数φ2は、低周波でのコントラスト感度MB1の単調増加を表現する関数である。尚、上記(6)式中のkは、所定の定数である。上記(6)式において、ガウス関数Gは、眼球のレンズ系による高周波の感度低下を表現する関数として用いられ、変数σは背景輝度LAにより決まる瞳の大きさを示す変数として用いられる。
【0035】
尚、上記(6)式の詳細は、例えば以下の文献に開示されている。
「PHYSICAL MODEL FOR THE CONTRAST SENSITIVITY OF THE HUMAN EYE」,Barten.P.G.J.,SPIE Proceedings,vol.1666,57-64,(1992)
上記(6)式は、DICOM(Digital Imaging and Communications in Medicine)という「医用デジタル画像と通信」に関する国際標準規格において、そのPart 14「表示デバイスの階調特性を統一するための画像表示関数」の規格設計に利用されているモデルである。尚、コントラスト感度MB1は、一次元のMTF特性を近似できる関数であれば良く、上記(6)式に限定される訳ではない。但し、背景輝度が考慮された関数であることが望ましく、更には観察視角が考慮された関数であることが望ましい。
【0036】
本実施形態の地合検査装置1は、紙Pの二次元画像を撮影して地合を検査するものである。上記(6)式は、一次元のMTF特性を表すものであることから、本実施形態では二次元のMTF特性を表す式を用いる必要がある。空間周波数uを水平方向の空間周波数uhと垂直方向の空間周波数uvとで表現すると、上記(6)式で示される一次元MTF特性(コントラスト感度MB1)を以下の(7)式に示す二次元のMTF特性(コントラスト感度MB1)に拡張することができる。
【数7】
但し、上記(7)式中の関数u(uh,uv)は、以下の(8)式に示す関数である。
【数8】
【0037】
図4は、二次元のMTF特性の一例を示す図である。図4に示す二次元のMTF特性は、図3(a)に示す一次元のMTF特性を、直流成分(周波数が0である成分)を中心に回転させていわば同心円状にしたものである。このため、例えば図4に示す二次元のMTF特性の中心点Oから端点Aに至るまでの破線に沿うMTF特性を求めると、図3(a)に示す一次元のMTF特性を得ることができる。
【0038】
ここで、二次元のMTF特性は、縞パターンの配列方向に応じて異方性があることが知られている。図5は、異方性を考慮した二次元のMTF特性の一例を示す図である。図5に示す通り、異方性を考慮した二次元のMTF特性は、白い部分(コントラスト感度が高い部分)が中心から水平方向及び垂直方向に延びたものとなる。これは、水平方向に沿って明暗が交互に現れる縞パターン(0度の縞パターン)や垂直方向に沿って明暗が交互に現れる縞パターン(90度の縞パターン)についてはコントラスト感度が高いが、水平方向及び垂直方向の双方に対する斜め方向に沿って明暗が交互に現れる縞パターン(45度の縞パターン)に対してはコントラスト感度が低いことを意味する。
【0039】
図5に示す異方性を考慮したMTF特性は、図4に示す異方性を考慮していないMTF特性よりも人間の視覚のMTF特性に近いものである。このため、図5に示す異方性を考慮したMTF特性を用いることで、人間が紙Pの地合を検査する場合と同様の検査を実現することが可能になる。
【0040】
縞パターンの配列方向に応じた異方性を表現する補正関数Dは、例えば以下の(9)式で表される。
【数9】
但し、上記(9)式中のδ,ε,ζ,ηは定数であり、関数θ(uh,uv)は以下の(10)式で表される関数である。
【数10】
【0041】
図5に示す異方性を考慮した二次元のMTF特性(コントラスト感度M2)は、以下の(11)式に示す通り、前述した(7)式に上記(9)式を乗算することで得られる。
【数11】
【0042】
ここで、前述した通り、画像処理部34で算出される地合指数は、実際に人間が紙Pを検査した際の地合の目立ち度合を反映させたものであり、人間の視覚の感知限界(JND)を基準として定量的に表現したものである。いま、空間周波数がuであって背景輝度がLAである正弦波状の縞パターンが検査対象物としての紙Pに形成されており、これを観察視角dで観察している場合を考える。
【0043】
この縞パターンの背景輝度LAに対するコントラストをCとし、背景輝度LA及び観察視角dにおけるMTF特性により、空間周波数uのコントラスト感度をMuとすると、目立ち度合Jは、以下の(12)式で求められる。
【数12】
【0044】
上記(12)式を参照すると、目立ち度合Jは、コントラストCとコントラスト感度Muとを乗算したものである。ここで、前述した(2)式に示した通り、コントラスト感度は、明暗が正弦波状に変化する縞パターンを人間が観察する際に、感知することができる限界のコントラストであるJNDコントラストの逆数である。このため、上記(12)式に示す通り、目立ち度合Jは、コントラストCをJNDコントラストCJNDで除算したものでもあることから、「コントラストCがJNDコントラストCJNDの何倍であるか」を意味するものである。本実施形態では、このJNDコントラストCJNDが単位(以下、この単位を[JND]と表記する)となる目立ち度合Jを、地合指数として用いている。
【0045】
この目立ち度合Jは、0[JND]以上の値をとる。例えば、目立ち度合Jの値が0[JND]である場合には検査対象物が完全に均一であることを意味し、1[JND]である場合には検査対象物が感知限界であることを意味する。また、目立ち度合Jの値が1[JND]よりも小である場合には人間には感知できないことを意味し、1[JND]以上である場合には、人間が感知できることを意味する。尚、目立ち度合Jの値が大きくなるにつれて地合が目立つようになるため悪い地合であることを意味する。
【0046】
尚、上記(12)式に示す通り、地合指数(目立ち度合J)を求めるには、縞パターンの背景輝度LAに対するコントラストCを得る必要がある。ここで、検査対象物としての紙Pを撮影して得られる画像データは、複数の空間周波数成分が重なり合った状態のものである。このため、画像データに対して高速フーリエ変換(FFT:Fast Fourier Transform)を行って、空間周波数毎のコントラストを示すコントラスト分布画像を得ている。尚、コントラスト分布画像を容易に得るために、画像入力装置20から出力される画像データを、画像入力装置20で得られる画像の物理的な輝度を示す画像データに変換してからFFT演算を行うのが望ましい。
【0047】
〈画像処理部の構成〉
次に、以上説明した地合指数(目立ち度合J)を算出する画像処理部34の具体的構成について説明する。図6は、本発明の第1実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。図6に示す通り、画像処理部34は、測定領域設定部41、画像補正部42、及び地合指数算出部43を備えており、検査制御部35から出力される画像入力条件データD11及び観察条件データD12に応じ、記憶部33から読み出した画像データD1に対する画像処理を行って地合指数DXを算出する。
【0048】
ここで、検査制御部35から出力される画像入力条件データD11は、検査対象物としての紙Pの画像を得るために用いられている照明装置10及び画像入力装置20の器差の影響を排除するためのデータであり、例えば輝度変換特性パラメータ、露光時間パラメータ、ノイズ特性パラメータ、実寸変換パラメータを含むデータである。他方、検査制御部35から出力される観察条件データD12は、検査対象物としての紙Pの観察条件を人間が紙Pを観察する場合と同様の観察条件に設定するためのデータであり、例えば観察視距離パラメータ及び観察輝度パラメータを含むデータである。
【0049】
画像入力条件データD11に含まれる輝度変換特性パラメータは、画像入力装置20から出力される画像データ(記憶部33から読み出した画像データD1)を物理量としての輝度値(例えば、単位が[cd/m2]である輝度値)に変換するために用いられるパラメータである。露光時間パラメータは、画像入力装置20が備える撮像装置22で紙Pを撮影する際の露光時間を示すパラメータである。
【0050】
上記の輝度変換特性パラメータとしては、例えば予め輝度の安定した光源(例えば、積分球等を備える光源)の輝度を変化させながら画像入力装置20で光源を撮影して画像データを得ておき、輝度及び露光時間に対する画像データの階調特性をもとに作成した変換テーブルの値、或いは、変換式の係数が用いられる。
【0051】
ここで、一般的に、画像入力装置20から出力される画像データの階調Vは、露光時間Tに比例するとともに、画像入力装置20が産業用である場合には入力輝度Lに比例し、画像入力装置20が民生用である場合には入力輝度Lのべき乗に比例する。このため、上記の変換式は、輝度の安定した光源を撮影するときの露光時間をT0とすると、例えば以下の(13)式で表される。
【数13】
上記(13)式中の係数α,β,γ,及びT0が、上述の輝度変換特性パラメータとして用いられる。尚、(13)式中の係数βは、画像入力装置20が産業用である場合には値が「1」である。
【0052】
ノイズ特性パラメータは、画像入力装置20の光ショットノイズや暗電流の影響を除去するためのパラメータである。ここで、光ショットノイズは、一般的に信号量の平方根に比例するとされ、画像データの画素値が大きいほど大きくなる。このノイズ特性パラメータとしては、例えば予め輝度の安定した光源(例えば、積分球等を備える光源)の輝度を変化させながら画像入力装置20で光源を撮影して画像データを得ておき、画像データの階調ばらつきの特性をもとに作成した変換テーブルの値、或いは、変換式の係数が用いられる。
【0053】
上記の変換式は、ノイズによるばらつき量をNとし、画像データの階調をVとすると、例えば以下の(14)式で表される。
【数14】
上記(14)式中の係数a,b,cが、ノイズ特性パラメータとして用いられる。
【0054】
実寸変換パラメータは、観察条件データD12に含まれる観察視距離パラメータとともに、MTF特性を決定付ける観察視角を設定するためのパラメータである。実寸変換パラメータは、画像入力装置20で撮影される画像の寸法を、紙P上における実寸法に変換するために用いられるパラメータであり、例えば画像入力装置20が備える撮像装置22の1画素で撮影することができる紙P上における大きさを示す値が用いられる。この実寸変換パラメータは、画像入力装置20の設置条件の違いや器差の影響を排除するために用いられる。
【0055】
観察条件データD12に含まれる観察視距離パラメータは、検査対象物としての紙Pを観察する距離(視距離)を規定するパラメータであり、任意の値を規定することができる。この観察視距離パラメータは、あたかも人間がその視距離から検査対象物としての紙Pを観察している観察条件を設定するためのものである。ここで、視距離が変わると視角が変わるため、人間が感じる地合の目立ち度合も変化する。算出される地合指数(目立ち度合)の客観性を維持するため、観察視距離パラメータは、検査対処物の種類毎、製紙ライン毎、事業所毎、或いは企業毎に固定され、更には業界内で固定されているのが望ましい。
【0056】
観察輝度パラメータは、検査対象物としての紙Pを観察する輝度を規定するパラメータであり、任意の値を規定することができる。この観察輝度パラメータは、紙Pの種類や装置の種類によらず、透過光量が予め定められた基準光量(基準輝度)に調整された状態で紙Pを観察した際の目立ち度合を算出するためのものである。ここで、紙Pの種類による透過率の違いがある場合、或いは、装置による光量の違い等がある場合には、人間が感じる地合の目立ち度合も変化する。このため、算出される地合指数(目立ち度合)の客観性を維持するため、観察輝度パラメータは、検査対処物の種類毎、製紙ライン毎、事業所毎、或いは企業毎に固定され、更には業界内で固定されているのが望ましい。
【0057】
測定領域設定部41は、記憶部33に記憶された画像データD1を読み出し、読み出した画像データD1で示される画像に対して地合指数DXを算出する領域を設定する。具体的には、記憶部33から読み出した画像データD1で示される画像から検査対象物としての紙Pが撮影されている領域を抽出し、この抽出した領域に対して地合指数DXを算出する領域(以下、検査領域という)を設定する。
【0058】
画像補正部42は、測定領域設定部41によって検査領域が設定された画像データに重畳しているノイズを除去する。例えば、画像データに重畳している高周波ノイズの除去、照明装置10や画像入力装置20の光学特性に起因する照度ムラや画像入力装置20の開口特性に起因する低周波のシェーディングの除去を行って、ノイズが除去された補正画像データを出力する。
【0059】
具体的に、画像補正部42は、検査制御部35から出力される画像入力条件データD11に含まれるノイズ特性パラメータから、画像入力装置20の光ショットノイズや暗電流等に起因する高周波ノイズを除去したノイズ補正画像データINCを生成する。例えば、画像データD1のうちの検査領域内におけるデータ(以下、原画像データIOという)に対して3×3画素のサイズで移動平均処理を行うことにより平均画像データIOAを求め、前述した(14)式を用いて平均画像データIOAの画素毎のノイズ量を示す高周波ノイズ量画像INを生成する。そして、原画像データIOと平均画像データIOAとの画素毎の差分を求め、この差分の値が上記の高周波ノイズ量画像INより小さい場合にはその差分をノイズとみなして平均画像データIOAの値を真の値とし、上記の高周波ノイズ量画像INより大きい場合には原画像データIOから高周波ノイズ量画像INを取り除いた値を真の値とすることでノイズ補正画像データINCを生成する。
【0060】
次いで、画像補正部42は、上記のノイズ補正画像データINCに対し、移動平均処理やFFT演算、光学シミュレーション等によりシェーディング画像データISと、シェーディング画像データISの基準領域の値VBを取得し、例えば以下の(15)式に示す演算式を用いてシェーディング補正データICを生成する。ここで、基準領域の値VBとしては、例えばシェーディング画像データISの画像中心の値、或いは、画像中心を含む領域の平均値若しくは最大値を用いる。上記のシェーディング補正データICが、画像補正部42から補正画像データとして出力される。
【数15】
【0061】
地合指数算出部43は、輝度変換部51(変換手段)、観察輝度変換部52(調整手段)、局所サイズ算出部53、局所領域設定部54(設定手段)、FFT演算部55(第1演算手段)、MTF演算部56、局所地合指数演算部57(第2演算手段)、地合分布画像生成部58、及び地合分布統計演算部59(統計演算手段)を備える。かかる構成の地合指数算出部43は、検査制御部35から出力される画像入力条件データD11及び観察条件データD12を用いて、画像補正部42から出力される補正画像データから地合指数DXを算出する。
【0062】
輝度変換部51は、画像入力条件データD11に含まれる輝度変換特性パラメータ及び露光時間パラメータを用いて、画像補正部42からの補正画像データを物理量としての輝度値(例えば、単位が[cd/m2]である輝度値)を示す輝度画像データに変換する。具体的には、輝度変換特性パラメータ(α,β,γ,T0)及び露光時間パラメータ(T)を(13)式にそれぞれ代入するとともに、画像補正部42から出力される補正画像データIC(各画素の階調値)を(13)式の変数Vに代入して各画素の入力輝度Lを求めることにより、補正画像データICを輝度画像データILに変換する。
【0063】
観察輝度変換部52は、観察条件データD12に含まれる観察輝度パラメータを用いて、輝度変換部51からの輝度画像データILを観察輝度画像データILSに変換する。ここで、観察輝度画像データILSは、透過光量が予め定められた基準光量に調整された状態で紙Pを観察したときの輝度を示すデータである。かかる変換処理を行うのは、紙Pの種類や装置の種類によらずに、紙Pの地合の客観的な検査を実現するためである。
【0064】
具体的に、観察輝度変換部52は、輝度変換部51からの輝度画像データILの平均輝度LAを算出し、輝度画像データIL、平均輝度LA、及び観察条件データD12に含まれる観察輝度パラメータLVを、例えば以下の(16)式に代入することにより観察輝度画像データILSを求める。
【数16】
【0065】
局所サイズ算出部53は、画像入力条件データD11に含まれる実寸変換パラメータと観察条件データD12に含まれる観察視距離パラメータとから、検査領域内に設定すべき局所領域の大きさを示す局所領域サイズRh,Rvと、局所領域の視角を示す局所領域視角dh,dvとを算出する。ここで、人間が紙Pを目視にて検査する場合には、例えば視角2°程度の限定された視野で紙Pを観察し、注視点を動かしながら紙Pの全体を検査する。上記の局所領域は、人間が行う検査と同様の検査を実現すべく設定される領域であって、人間の限定された視野で観察される領域に相当する領域である。
【0066】
具体的に、局所サイズ算出部53は、例えば画像入力条件データD11に含まれる実寸変換パラメータと観察条件データD12に含まれる観察視距離パラメータとを用いて、視角2°に相当する画素数を局所領域サイズRh,Rvとして算出する。ここで、局所領域サイズRh,Rvを画素数で表現すると、この局所領域サイズRh,Rvの大きさを有する局所領域の視角は2°からずれるのが殆どである。このため、局所サイズ算出部53は、画像入力条件データD11に含まれる実寸変換パラメータと観察条件データD12に含まれる観察視距離パラメータとを用いて、画素数で表現された局所領域サイズRh,Rvの大きさを有する局所領域の視角を局所領域視角dh,dvとして算出する。
【0067】
局所領域設定部54は、局所サイズ算出部53で算出される局所領域サイズRh,Rvを用いて検査領域内に局所領域を設定する。具体的には、例えば水平方向の大きさが局所領域サイズRhであって、垂直方向の大きさが局所領域サイズRvであり、隣接する局所領域の端部が重なり合うようにマトリクス状に配列された矩形形状の複数の局所領域を検査領域内に設定する。
【0068】
FFT演算部55は、空間周波数毎のコントラストを示すコントラスト分布画像Ci(第1データ)を算出する。具体的には、観察輝度変換部52で変換された観察輝度画像データILSから、局所領域設定部54で設定された1つの局所領域内のデータ(以下、局所領域観察輝度画像データILSiという)を抽出し、この局所領域観察輝度画像データILSiに対して二次元FFT演算を行ってパワースペクトル画像を求め、局所領域の大きさ(Rh×Rv)で除算することで正規化パワースペクトル画像を求める。そして、正規化パワースペクトル画像を、その中心点の値で除算することによって、コントラスト分布画像Ciを算出する。
【0069】
ここで、正規化パワースペクトル画像の中心点の値は、局所領域観察輝度画像データILSiが抽出された局所領域の平均輝度LAiを表す。このため、正規化パワースペクトル画像を、その中心点の値で除算すればコントラスト分布画像を求めることができる。尚、一般的に、FFT演算では、信号の不連続性により生成されるパワースペクトルに実際存在しない成分が出現する。このため、例えば赤池窓と呼ばれる窓関数を用いて補正しておくのが望ましい。
【0070】
MTF演算部56は、局所サイズ算出部53で設定された局所領域視角dh,dvとFFT演算部55で用いられる平均輝度LAiとを用いて、MTF画像M2i(第2データ)を生成する。このMTF画像M2iは、観察条件データD12に含まれる観察視距離パラメータ及び観察輝度パラメータで規定される観察条件で紙Pを観察した場合の空間周波数毎のコントラスト感度を示すものである。
【0071】
具体的に、MTF演算部56は、FFT演算部55で算出されるコントラスト分布画像で用いられている空間周波数fh,fvを局所領域視角dh,dvでそれぞれ除算することにより、単位が[サイクル数/視角]である空間周波数uh,uvに変換する。そして、この空間周波数uh,uv、FFT演算部55で用いられる平均輝度LAi、及び局所領域視角dh,dvを、例えば(11)式に代入することでMTF画像M2iを生成する。
【0072】
局所地合指数演算部57は、FFT演算部55で求められたコントラスト分布画像Ciと、MTF演算部56で求められたMTF画像M2iとを用いて局所地合指数Jiを算出する。具体的には、(12)式に示されている通り、コントラスト分布画像CiとMTF画像M2iとを空間周波数毎に乗算し、これにより得られた値を加算することによって、局所地合指数Jiを算出する。
【0073】
地合分布画像生成部58は、局所地合指数演算部57で算出される局所地合指数Jiから、局所地合指数Jiの二次元分布を示す地合分布画像を生成する。つまり、局所領域設定部54によって検査領域内に複数の局所領域が設定されており、FFT演算部55、MTF演算部56、及び局所地合指数演算部57によって局所領域の各々について局所地合指数Jiが求められることから、地合分布画像生成部58は、検査領域内における局所地合指数Jiの二次元分布を示す地合分布画像を生成する。
【0074】
地合分布統計演算部59は、地合分布画像生成部58で生成される局所地合指数Jiの二次元分布を示す地合分布画像に対して統計的演算を行って地合指数DXを求める。具体的に、地合分布統計演算部59は、例えば局所地合指数Jiの二次元分布を示す地合分布画像に対して平均化処理、最大値算出処理、標準偏差算出処理等を行い、これらの処理によって得られた値を地合指数DXとして求める。尚、局所領域設定部54によって検査領域内に1つの局所領域のみが設定された場合には、局所地合指数演算部57で算出された局所地合指数Jiが地合指数DXとなる。
【0075】
〈地合検査装置の動作〉
次に、上記構成の地合検査装置の動作について説明する。検査が開始されると、検査制御部35によって照明制御部31が制御され、照明装置10から検査対象物としての紙Pの裏面に対して照明光が照射される。紙Pに照射された照明光は、その一部が紙Pを透過し、残りが裏面で反射或いは散乱される。
【0076】
照明光が紙Pに照射されている間(紙Pを透過する一部の光がある間)の所定のタイミングで、画像入力装置20が備える撮像装置22によって紙Pの表面が撮影され、その画像の画像データが画像入力装置20から出力される。画像入力装置20から出力された画像データは、検査制御部35の制御によって画像取込部32に取り込まれて記憶部33に記憶される。
【0077】
画像データが記憶部33に記憶されると、検査制御部35から画像処理部34に対して画像入力条件データD11及び観察条件データD12が出力され、検査制御部35の制御の下で、記憶部33に記憶された画像データD1が画像処理部34に読み出されて地合指数DXを算出する処理が開始される。尚、ここでは、画像データが記憶部33に記憶されてから画像入力条件データD11及び観察条件データD12が検査制御部35から画像処理部34に出力されるとしているが、検査制御部35から画像処理部34に対する画像入力条件データD11及び観察条件データD12の出力は、検査開始前に予め行っていても良い。
【0078】
画像処理部34の処理が開始されると、まず記憶部33から読み出された画像データD1で示される画像から紙Pが撮影されている領域を抽出し、この抽出した領域に対して検査領域を設定する処理が測定領域設定部41で行われる。次に、検査領域が設定された画像データに重畳しているノイズを除去する処理が画像補正部42で行われ、前述した(15)式に示す演算式を用いて生成されたシェーディング補正データICが補正画像データとして地合指数算出部43に出力される。
【0079】
補正画像データが地合指数算出部43に入力されると、まず画像入力条件データD11に含まれる輝度変換特性パラメータ及び露光時間パラメータを用いて、補正画像データを物理量としての輝度値(例えば、単位が[cd/m2]である輝度値)を示す輝度画像データILに変換する処理が輝度変換部51で行われる。次いで、観察条件データD12に含まれる観察輝度パラメータを用いて、輝度変換部51からの輝度画像データILを観察輝度画像データILSに変換する処理が観察輝度変換部52で行われる。これにより、透過光量が予め定められた基準光量に調整された状態で紙Pを観察したときの輝度を示す観察輝度画像データILSが求められるため、紙Pの種類や装置の種類によらずに、紙Pの地合の客観的な検査が実現されることになる。
【0080】
観察輝度画像データILSが求められると、画像入力条件データD11に含まれる実寸変換パラメータと観察条件データD12に含まれる観察視距離パラメータとから、検査領域内に設定すべき局所領域の大きさを示す局所領域サイズRh,Rvと、局所領域の視角を示す局所領域視角dh,dvとを算出する処理が局所サイズ算出部53で行われる。そして、局所サイズ算出部53で算出される局所領域サイズRh,Rvを用いて検査領域内に局所領域を設定する処理が局所領域設定部54で行われる。
【0081】
以上の処理が終了すると、検査領域内に設定された局所領域に対して空間周波数毎のコントラストを示すコントラスト分布画像Ciを算出する処理がFFT演算部55で行われる(第1ステップ)。また、局所サイズ算出部53で設定された局所領域視角dh,dvとFFT演算部55で用いられる平均輝度LAiとを用いて、MTF画像M2iを生成する処理がMTF演算部56で行われる(第2ステップ)。
【0082】
そして、FFT演算部55で求められたコントラスト分布画像Ciと、MTF演算部56で求められたMTF画像M2iとを用いて局所地合指数Jiを算出する処理が局所地合指数演算部57で行われる(第3ステップ)。具体的には、前述した(12)式に示されている通り、FFT演算部55で求められたコントラスト分布画像Ciと、MTF演算部56で求められたMTF画像M2iとを空間周波数毎に乗算し、これにより得られた値を加算することによって、局所地合指数Jiが算出される。
【0083】
以上のFFT演算部55、MTF演算部56、及び局所地合指数演算部57の処理は、検査領域内に設定された局所領域の各々に対して行われる。ここで、これらFFT演算部55、MTF演算部56、及び局所地合指数演算部57の処理は、1つの局所領域毎に順次行っても良く、或いは、複数の局所領域について並行して行っても良い。複数の局所領域に対する処理を並行して行うことにより、局所地合指数Jiの算出に要する時間を短縮することができる。
【0084】
検査領域内に設定された全ての局所領域についての局所地合指数Jiが算出されると、地合分布画像生成部58によって局所地合指数Jiの二次元分布を示す地合分布画像が生成される。そして、地合分布統計演算部59において、局所地合指数Jiの二次元分布を示す地合分布画像に対して平均化処理、最大値算出処理、標準偏差算出処理等が行われ、これらの処理によって得られた値が地合指数DXとして求められる。
【0085】
以上の処理によって算出された地合指数DXは、画像処理部34から検査制御部35に出力され、地合指数DXに基づいて地合の良否が検査される。例えば、地合指数DXの値が1[JND]以上であって50[JND]以下である場合には検査結果が「良好」となり、地合指数DXの値が50[JND]よりも大である場合には検査結果が「不良」となる。このようにして得られた地合指数DX及び検査制御部35の検査結果は、検査結果出力部36に出力される。
【0086】
図7は、図28に示す画像(均一度及び平均輝度が同じであって粒度が異なる画像)から求められる局所地合指数の二次元分布を示す地合分布画像及び地合指数を示す図である。また、図8は、図29に示す画像(均一度及び粒度が同じであって平均輝度が異なる画像)から求められる局所地合指数の二次元分布を示す地合分布画像及び地合指数を示す図である。尚、図7,図8に示す地合分布画像及び地合指数は、図28,図29に示す画像に対し、画像高さの10倍の距離を観察視距離として求められたものである。また、図7,図8に示す地合分布画像は、所地合指数の値が大きいほど明るくなるように図示している。
【0087】
図28に示す画像の地合は、(c)に示す画像が最も良く、次いで(a)に示す画像が良く、(b)に示す画像が最も悪いと人間が目視にて認識することができるものであった。図7を参照すると、明部は、(c)に示す地合分布画像が最も少なく、次いで(a)に示す地合分布画像が少なく、(b)に示す地合分布画像が最も多い。また、地合指数は、(c)に示すものが最も小さく、次いで(a)に示すものが小さく、(b)に示すものが最も大きい。
【0088】
また、図29に示す画像の地合は、(a)に示す画像が最も良く、次いで(b)に示す画像が良く、(c)に示す画像が最も悪いと人間が目視にて認識することができるものであった。図8を参照すると、明部は、(a)に示す地合分布画像が最も少なく、次いで(b)に示す地合分布画像が少なく、(c)に示す地合分布画像が最も多い。また、地合指数は、(a)に示すものが最も小さく、次いで(b)に示すものが小さく、(c)に示すものが最も大きい。
【0089】
以上の通り、均一度及び平均輝度が同じであって粒度が異なる画像と、均一度及び粒度が同じであって平均輝度が異なる画像との双方の画像について、地合分布画像の明暗及び地合指数の値の大小が人間の目視による地合の感じ方と一致する。これは、本実施形態の地合検査装置1で紙を検査したときの検査結果が、人間(熟練の検査員)が目視で検査したときの検査結果と一致することを意味する。
【0090】
ここで、上述した実施形態では、画像処理部34に設けられた局所地合指数演算部57が、FFT演算部55で求められたコントラスト分布画像CiとMTF演算部56で求められたMTF画像M2iとを空間周波数毎に乗算し、これにより得られた値を加算することによって、局所地合指数Jiを算出するものを例に挙げて説明した。しかしながら、局所地合指数演算部57は、以下の(17)式に示す通り、重み付け演算を行って局所地合指数Jiを算出するものであっても良い。
【0091】
具体的には、コントラスト分布画像CiとMTF画像M2iとを空間周波数毎に乗算して得られた値のw乗(wは任意の実数)を演算して加算し、これにより得られた値の1/w乗値を求めて局所地合指数Jiとしてもよい。かかる重み付け演算を行うことで、地合指数の精度をより向上させることができる。
【数17】
尚、上記(17)式において、wの値を「1」にすれば、上述した実施形態で説明した処理と同様の処理(重み付け演算を行わずに局所地合指数Jiを算出する処理)が行われる。
【0092】
図9は、局所地合指数を算出する際に重み付け演算を行わない場合と重み付けを行った場合との効果の差を説明するための図であって、(a)は重み付け演算を行わない場合の効果を示す図であり、(b)は重み付け演算を行った場合の効果を示す図である。また、図10は、図9に示す効果の差を説明するために用いる地合パターンの一例を示す図である。図10(a)に示す地合パターンは、明暗が水平方向に正弦波状に変化する縞パターン(以下、正弦波状パターンという)であり、図10(b)に示す地合パターンは、形状が円形である塊状のパターン(以下、塊状パターンという)である。
【0093】
図9(a),(b)では、横軸に人間の目視による検査結果(実験値)をとり、縦軸に地合検査装置1の検査結果(予測値)をとっている。但し、人間の目視による検査から地合指数を直接求めるのは困難であるため、図10(a)に示す正弦波状パターンを、周波数(水平方向の明暗の数)や背景輝度を異ならせて目視にて観察し、或いは、図10(b)に示す塊状パターンを、大きさや背景輝度を異ならせて目視にて観察してJNDコントラストを求める実験を行い、この実験によって得られるJNDコントラスト[%]を横軸の「実験値」としている。
【0094】
また、以上の実験と同様の実験を地合検査装置1で行った場合には、算出される地合指数の値がほぼ「1」になって差が小さいため、重み付け演算の有無による効果を評価するのは難しい。このため、図9(a),(b)では、前述した(12)式から、コントラストC(図10(a)に示す正弦波状パターンや図10(b)に示す塊状パターンのコントラスト)を、地合指数J(重み付け演算を行わずに算出された地合指数、或いは、重み付け演算を行って算出された地合指数)で除算して得られるJNDコントラスト[%]を縦軸の「予測値」としている。
【0095】
図9(a)を参照すると、図10(a)に示す正弦波状パターンを観察した場合には、近似直線Q1の相関係数R2が「0.94」となって実験値と予測値との間に高い相関があることが分かる。しかしながら、図10(a)に示す正弦波状パターンを観察した場合に加え、図10(b)に示す塊状パターンを観察した場合を含めた際には、近似直線Q2の相関係数R2が「0.40」となって実験値と予測値との間に高い相関がないことが分かる。
【0096】
これに対し、図9(b)を参照すると、図10(a)に示す正弦波状パターンを観察した場合に加え、図10(b)に示す塊状パターンを観察した場合を含めた際でも、近似直線Q3の相関係数R2が「0.94」となり、観察するパターンの形状の違いに拘わらず、実験値と予測値との間に高い相関があることが分かる。尚、図9(b)に示す結果は、前述した(17)式中のwの値を「1.3」にした場合に得られたものである。このように、重み付け演算を行って地合指数を求めることにより、地合指数の精度をより向上させることができる。
【0097】
以上の通り、本実施形態では、FFT演算部55で算出されたコントラスト分布画像と、MTF演算部56で求められたMTF画像とを空間周波数毎に乗算し、これにより得られた値を加算することによって、実際に人間が紙Pを検査した際の地合の目立ち度合を反映させた地合指数DXを算出している。このため、人間の視覚と同様の粒度や明度に応じた地合の違いを検査することができる。これにより、例えば書類や電話等で地合指数を知らせるだけで、地合の程度を相手方に伝えることが可能になる。
【0098】
また、地合指数DXを算出するに当り、紙Pの種類や装置の種類によらず、透過光量を予め定められた基準光量(基準輝度)に調整しているため、検査条件等の違いに拘わらず地合指数を用いて客観的に検査することが可能になる。これにより、検査条件によらず安定した地合指数の算出が可能であるとともに、異なる製造ラインで製造される紙Pの地合を相互比較するといったことが可能になる。
【0099】
〔第2実施形態〕
図11は、本発明の第2実施形態による地合検査装置の構成を示すブロック図である。図11に示す通り、本実施形態の地合検査装置2は、図1に示す地合検査装置1と同様に、照明装置10、画像入力装置20、及び制御処理装置30を備えており、搬送方向Z1に搬送される紙P(検査対象物)を撮影して得られる画像データに対する画像処理を行い、この画像処理により得られる地合指数に基づいて紙Pの地合を検査するものである。
【0100】
但し、図1に示す地合検査装置1は、照明装置10に対し紙Pを挟んで反対側に画像入力装置20が配置されており、紙Pを透過した光による画像(透過光画像)から紙Pの地合を検査する透過光方式の地合検査装置であった。これに対し、本実施形態の地合検査装置2は、紙Pに対し、照明装置10と同じ側に画像入力装置20が配置されており、紙Pの表面で反射或いは散乱された光による画像(反射光画像)から紙Pの地合を検査する反射光方式の地合検査装置である。
【0101】
尚、本実施形態の地合検査装置2は、反射光画像から紙Pの地合を検査する点において図1に示す地合検査装置1と相違するだけであり、制御処理装置30の構成及び動作は図1に示す地合検査装置1と同様である。このため、地合検査装置2の構成及び動作の詳細な説明は省略する。本実施形態の地合検査装置2も、実際に人間が紙Pを検査した際の地合の目立ち度合を反映させた地合指数DXを算出しているため、人間の視覚と同様の粒度や明度に応じた地合の違いを検査することができる等の効果が得られる。
【0102】
〔第3実施形態〕
図12は、本発明の第3実施形態による地合検査装置の構成を示すブロック図である。図12に示す通り、本実施形態の地合検査装置3は、紙Pの表面側に配置された照明装置10a及び画像入力装置20a、紙Pの裏面側に配置された照明装置10b及び画像入力装置20b、並びに制御処理装置30を備えており、搬送方向Z1に搬送される紙P(検査対象物)の両面を撮影して得られる画像データの各々に対する画像処理を行い、この画像処理により得られる地合指数に基づいて紙Pの地合を両面同時に検査可能なものである。
【0103】
照明装置10a,10bは、図1に示す照明装置10が備える光源11及び光学素子12と同様の光源11a及び光学素子12a、光源11b及び光学素子12bをそれぞれ備える。画像入力装置20a,20bは、図1に示す画像入力装置20が備える光学素子21及び撮像装置22と同様の光学素子21a及び撮像装置22a、光学素子21b及び撮像装置22bをそれぞれ備える。
【0104】
制御処理装置30は、画像取込部32a,32b、記憶部33a,33b、画像処理部34a,34b、検査結果出力部36、照明制御部61、及び検査制御部62を備えており、紙Pに対する照明光の照射制御を行うとともに、画像入力装置20から出力される画像データに対する画像処理を行う。そして、画像処理により得られる地合指数を用いて紙Pの地合を検査し、その検査結果を出力する。
【0105】
画像取込部32a、記憶部33a、及び画像処理部34aは、図1に示す画像取込部32、記憶部33、及び画像処理部34と同様のものであり、検査制御部62の制御の下で、画像入力装置20aから出力される画像データの取り込み、記憶、及び画像処理をそれぞれ行う。画像取込部32b、記憶部33b、及び画像処理部34bも、図1に示す画像取込部32、記憶部33、及び画像処理部34と同様のものであり、検査制御部62の制御の下で、画像入力装置20bから出力される画像データの取り込み、記憶、及び画像処理をそれぞれ行う。
【0106】
照明制御部61は、検査制御部62の制御の下で、紙Pの表面及び裏面の各々に照射される照明光の光量制御や照射タイミングの制御(例えば、ストロボ発光のタイミング制御)等を行う。検査制御部62は、照明制御部61を制御して紙Pの表面及び裏面の各々に照射される照明光の光量制御を行い、画像取込部32a,32bを制御して画像データの取り込み制御を行い、画像処理部34a,34bを制御して画像処理の実行制御を行う。尚、画像処理部34a,34bで地合指数が算出された場合には、検査制御部62は、それらの地合指数や検査結果を検査結果出力部36に出力する。
【0107】
本実施形態の地合検査装置3は、紙Pの表面における反射光画像から紙Pの表面の地合を検査すると同時に、紙Pの裏面における反射光画像から紙Pの裏面の地合を検査すること(両面同時検査)が可能なものであるが、各々の反射光画像を示す画像データに対して制御処理装置30で行われる処理は、図1に示す地合検査装置1と同様である。このため、地合検査装置3の構成及び動作の詳細な説明は省略する。
【0108】
本実施形態の地合検査装置3も、実際に人間が紙Pを検査した際の地合の目立ち度合を反映させた地合指数DXを算出しているため、人間の視覚と同様の粒度や明度に応じた地合の違いを検査することができる等の効果が得られる。また、本実施形態の地合検査装置3は、紙Pの表面の地合と裏面の地合とを切り分けることができるため、例えば表面及び裏面の地合の分布や搬送方向Z1のトレンドを解析することで、紙Pの表面側と裏面側との管理を個別に行うことができる。
【0109】
〔第4実施形態〕
図13は、本発明の第4実施形態による地合検査装置の構成を示すブロック図である。図13に示す通り、本実施形態の地合検査装置4は、紙Pを挟むように配置された照明装置10a,10b、紙Pの表面側に配置された画像入力装置20、及び制御処理装置30を備える構成である。尚、画像入力装置20は、紙Pの表面側に配置されていてもよく、紙の裏面側に配置されていても良い。
【0110】
つまり、本実施形態の地合検査装置4は、第1実施形態の地合検査装置1と第2実施形態の地合検査装置2とをいわば組み合わせた構成をしており、搬送方向Z1に搬送される紙P(検査対象物)の透過地合と反射地合との検査が可能である。但し、第1,第2実施形態による地合検査装置1,2に設けられる照明制御部31は、1つの照明装置10の制御を行うものであったが、本実施形態の地合検査装置4に設けられる照明制御部31は、第3実施形態の地合検査装置3に設けられる照明制御部61と同様に、2つの照明装置10a,10bの制御を行う点が相違する。
【0111】
本実施形態の地合検査装置4は、紙Pを挟むように照明装置10a,10bを配置しているため、例えば照明装置10a,10bの発光タイミングを異ならせることによって、画像入力装置20からは、透過光画像の画像データと反射光画像の画像データとが別々に出力される。このため、これら透過光画像の画像データと反射光画像の画像データとに対し、第1,第2実施形態と同様の画像処理を施せば、紙Pの透過地合と反射地合とを検査することができる。
【0112】
尚、本実施形態の地合検査装置4は、透過地合及び反射地合の双方の検査が可能である点において第1,第2実施形態の地合検査装置1,2と相違するものの、制御処理装置30で行われる具体的な画像処理は地合検査装置1,2と同様である。このため、地合検査装置4で行われる画像処理の詳細な説明は省略する。本実施形態の地合検査装置4も、実際に人間が紙Pを検査した際の地合の目立ち度合を反映させた地合指数DXを算出しているため、人間の視覚と同様の粒度や明度に応じた地合の違いを検査することができる等の効果が得られる。
【0113】
〔第5実施形態〕
図14は、本発明の第5実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。図14に示す通り、画像処理部34は、測定領域設定部41、画像補正部42、及び地合指数算出部43に加えて、地合劣化領域抽出部71と欠陥判定部72とを備える構成であり、地合指数DXの算出に加えて紙Pの欠陥検出を可能とするものである。この図14に示す画像処理部34は、図1に示す透過光方式の地合検査装置1、図11に示す反射光方式の地合検査装置2、図12に示す両面同時検査が可能な地合検査装置3、及び図13に示す透過方式・反射方式の検査が可能な地合検査装置4の何れにも適用することができる。
【0114】
地合劣化領域抽出部71は、地合分布画像生成部58で生成される地合分布画像に対して閾値を設定し、局所地合指数が閾値よりも大きくなる領域と、局所地合指数が閾値以下となる領域とを二値化処理等により抽出する。尚、地合劣化領域抽出部71は、抽出した領域に対してラベリング処理等を行ってラベル付けを行う。
【0115】
欠陥判定部72は、地合劣化領域抽出部71で抽出された各領域に対応する領域を観察輝度変換部52で生成された観察輝度変換画像から切り出して判定使用画像とし、この判定使用画像の特性を評価して欠陥領域、欠陥種類を判定する。尚、判定に使用する画像としては、観察輝度変換画像に代えて画像補正部42で生成される補正画像や輝度変換部51で生成される輝度画像を用いてもよい。
【0116】
ここで、欠陥領域は、判定使用画像の平均値からの乖離が大きな領域とみなすことができる。このため、欠陥判定部72は、例えば判定使用画像の平均値を算出し、その平均値より高い領域、或いは低い領域を抽出することで欠陥領域であるか否かの判定を行う。また、欠陥判定部72は、抽出した領域が平均値に対して高い領域であるか、或いは低い領域であるかによって明欠陥か暗欠陥かを分類する。更には、抽出した領域が点状であるか、或いはスジ状であるか等をフィルタリング処理や学習により判断することで欠陥種類を判定する。
【0117】
上記構成において、記憶部33に記憶された画像データD1が読み出されて画像処理部34に入力されると、第1実施形態と同様の処理が行われて地合指数DXが算出される。具体的には、例えばFFT演算部55で局所領域毎のコントラスト分布画像を算出する処理が行われるとともに、MTF演算部56で局所領域毎のMTF画像を生成する処理が行われる。そして、これらコントラスト分布画像とMTF画像とから局所領域毎の局所地合指数を算出する処理が地合指数演算部57で行われ、局所地合指数の二次元分布を示す地合分布画像を生成する処理が地合分布画像生成部58で行われる
【0118】
地合分布画像生成部58で地合分布画像が生成されると、地合劣化領域抽出部71に入力されて、所定の閾値を用いた二値化処理等が行われて局所地合指数が閾値よりも大きくなる領域と局所地合指数が閾値以下となる領域とが抽出される。次いで、観察輝度変換部52で生成された観察輝度変換画像から、地合劣化領域抽出部71で抽出された各領域に対応する領域が判定使用画像として切り出され、欠陥判定部72で欠陥領域、欠陥種類が判定される。
【0119】
以上の通り、本実施形態では、目立ち度合を反映させた局所地合指数の二次元分布を示す地合分布画像を用いて局所地合指数が閾値よりも大きくなる領域と、局所地合指数が閾値以下となる領域とを二値化処理等により抽出し、この抽出された領域に対応する領域が観察輝度変換画像から判定使用用画像として切り出して欠陥領域、欠陥種類を判定している。このため、欠陥の形状によらず、人間が観察した際に目立つ領域を欠陥として検出することができるため、想定外の欠陥形状の検出が可能になる。
【0120】
〔第6実施形態〕
図15は、本発明の第6実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。図15に示す通り、画像処理部34は、測定領域設定部41、画像補正部42、及び地合指数算出部80を備える構成であり、検査制御部35等から出力される画像入力条件データD11及び観察条件データD12並びにクラス別解析条件データD21を用いて、地合指数DXに加えてクラス毎の地合指数DXnを算出する。尚、クラスの総数をKとすると、変数nは1≦n≦Kを満たす整数である。
【0121】
この図15に示す画像処理部34は、図1に示す透過光方式の地合検査装置1、図11に示す反射光方式の地合検査装置2、図12に示す両面同時検査が可能な地合検査装置3、及び図13に示す透過方式・反射方式の検査が可能な地合検査装置4の何れにも適用することができる。
【0122】
ここで、前述した第1〜第5実施形態では、実際に人間が紙Pを検査した際の地合の目立ち度合を反映させた地合指数DXの算出を行っているため、人間の視覚と同様の粒度や明度に応じた地合の違いを検査することは可能である。しかしながら、地合指数DXだけでは地合の目立ち方の種類やその発生原因を特定することができず、地合の改善を図るための情報としては不十分な場合がある。例えば、紙P上に周囲とは地合が異なる領域が存在している場合に、地合指数DXを用いればその領域を検出することはできるものの、地合の違いが生ずる具体的な原因(その領域に小さな黒点が多数集まっていること、或いは、紙Pに生じている大きなムラによるものであること等)を特定することはできない場合である。
【0123】
そこで、本実施形態では、局所地合指数演算部57で得られる乗算結果(FFT演算部55で求められるコントラスト分布画像CiとMTF演算部56で求められるMTF画像M2iとの空間周波数毎の乗算結果:第3データ)を複数のクラスに分類してクラス毎の地合指数DXnを算出し、地合指数DXとクラス毎の地合指数DXnを用いることで、地合の目立ち方の種類やその発生原因の特定を容易にすることとしている。上記のクラスの分類法としては、二次元の周波数空間(水平方向の空間周波数uhと垂直方向の空間周波数uvとで表現された図4等に示す周波数空間)を周波数毎或いは方向毎に複数の領域に分類する分類法や重み付けに応じた分類法が挙げられる。
【0124】
図16は、本発明の第6実施形態におけるクラスの分類法の一例を示す図である。図16(a)に示す例では、二次元の周波数空間が同心の8個のリング状の領域(クラスC1〜C8)に分類されている。二次元の周波数空間は、中心部分に直流成分が配置され、中心部分から離れるにつれてより周波数の高い成分が配置される。このため、図16(a)に示す分類を行うことにより、二次元の周波数空間の周波数成分を周波数毎に分類することが可能になる。
【0125】
クラス別解析条件データD21は、上記のクラスの分類を規定するデータであり、画像入力条件データD11及び観察条件データD12とともに、検査制御部35等から出力される。具体的に、クラス別解析条件データD21は、局所地合指数演算部57で得られる空間周波数毎の乗算結果に対する重み付けを規定する周波数重みデータWnを含むデータである。具体的に、図16(a)に示す分類がなされる場合には、クラスの各々について、内部では値が「1」であり、外部では値が「0」である二値の周波数重みデータWnが規定される。例えば、クラスC2に着目すると、図16(b)に示す通り、その内部(斜線が付されていない部分)は値が「1」であり、その外部(斜線が付された部分)は値が「0」である周波数重みデータWnが規定される。この周波数重みデータWnは任意の値を規定することができるが、全てのクラスについての値の総和が「1」となるように設定するのが望ましい。
【0126】
尚、クラスの分類法としては、図16に示すリング状の領域に分類する方法以外に、二次元の周波数空間を方向に応じて放射状の領域に分類する方法も考えられる。このような分類を行う場合には、二次元の周波数空間における中心部分(直流成分が配置される部分)の近傍では周辺部分(高い成分が配置される部分)に比べて角度解像度が悪くなる。このような場合には、角度解像度が悪い中心部分に対しては値が小さく、周辺部分に行くにつれて値が徐々に大きくなる周波数重みデータWnを用いるのが望ましい。
【0127】
画像処理部34の地合指数算出部80は、図6,図14に示す輝度変換部51〜地合分布統計演算部59に加えて、クラス別局所地合指数演算部81n(第3演算手段,第4演算手段)、クラス別地合分布画像生成部82n、及びクラス別地合分布統計演算部83nを備える。尚、図15においては、理解を容易にするために、局所地合指数演算部57が乗算部57aと加算部57bとを備える構成にしている。乗算部57aは、FFT演算部55で求められるコントラスト分布画像CiとMTF演算部56で求められるMTF画像M2iとを空間周波数毎に乗算する構成を示しており、加算部57bは、乗算部57aにより得られた値を加算して局所地合指数Jiを求める構成を示している。
【0128】
クラス別局所地合指数演算部81nは、クラス別解析条件データD21に基づいて、クラス毎の局所地合指数であるクラス別局所地合指数Jniを算出する。具体的には、局所地合指数演算部57の乗算部57aで求められた空間周波数毎の乗算結果(Ci・M2i:第3データ)に対してクラス別解析条件データD21に規定される周波数重みデータWnを乗算し、これにより得られた値を加算することによってクラス別局所地合指数Jniを算出する。
【0129】
尚、クラス別局所地合指数演算部81nは、局所地合指数演算部57と同様に、重み付け演算を行ってクラス別局所地合指数Jniを算出するものであっても良い。具体的には、以下の(18)式に示す通り、コントラスト分布画像CiとMTF画像M2iとの空間周波数毎の乗算結果に周波数重みデータWnを乗算して得られた値のw乗(wは任意の実数)を演算して加算し、これにより得られた値の1/w乗値を求めてクラス別局所地合指数Jniとしてもよい。
【数18】
以上の重み付け演算を行うことで、クラス別地合指数の精度をより向上させることができる。
【0130】
クラス別地合分布画像生成部82nは、クラス別解析条件データD21に基づいて、クラス別局所地合指数演算部81nで算出されるクラス別局所地合指数Jniから、クラス別局所地合指数Jniの二次元分布を示すクラス別地合分布画像をそれぞれ生成する。つまり、FFT演算部55、MTF演算部56、及び局所地合指数演算部57によって局所地合指数Jiが複数の局所領域(局所領域設定部54によって検査領域内に設定された局所領域)の各々について求められるのと同様に、クラス別地合分布画像生成部82nは、検査領域内におけるクラス別局所地合指数Jniの二次元分布を示す地合分布画像をそれぞれ生成する。
【0131】
クラス別地合分布統計演算部83nは、クラス別解析条件データD21に基づいて、クラス別地合分布画像生成部82nで生成されるクラス別局所地合指数Jniの二次元分布を示す地合分布画像に対して統計的演算を行ってクラス別地合指数DXnをそれぞれ求める。具体的に、クラス別地合分布統計演算部83nは、例えばクラス別局所地合指数Jniの二次元分布を示す地合分布画像に対して平均化処理、最大値算出処理、標準偏差算出処理等を行い、これらの処理によって得られた値をクラス別地合指数DXnとしてそれぞれ求める。尚、局所領域設定部54によって検査領域内に1つの局所領域のみが設定された場合には、クラス別局所地合指数演算部81nで算出されたクラス別局所地合指数Jniがクラス別地合指数DXnとなる。
【0132】
上記構成の地合検査装置においては、画像処理部34の測定領域設定部41、画像補正部42、及び地合指数算出部80に設けられた輝度変換部51〜地合分布統計演算部59で第1実施形態と同様の処理が行われて地合指数DXが算出される。かかる処理と並行して、局所地合指数演算部57の乗算部57aで求められた空間周波数毎の乗算結果がクラス別局所地合指数演算部81nに出力されてクラス別局所地合指数Jniが算出される。
【0133】
具体的には、局所地合指数演算部57の乗算部57aで求められた空間周波数毎の乗算結果に対し、クラス別解析条件データD21に規定される周波数重みデータWnがクラス毎に乗算され、これにより得られた値がクラス毎に加算されることによってクラス別局所地合指数Jniが算出される。尚、クラス別局所地合指数演算部81nの処理は、局所地合指数演算部57の処理と同様に、局所領域設定部54で設定された検査領域内における局所領域の各々に対して行われる。
【0134】
検査領域内に設定された全ての局所領域について、クラス別局所地合指数Jniが算出されると、クラス別地合分布画像生成部82nによってクラス別局所地合指数Jniの二次元分布を示す地合分布画像がそれぞれ生成される。そして、クラス別地合分布統計演算部83nにおいて、クラス別局所地合指数Jniの二次元分布を示す地合分布画像に対して平均化処理、最大値算出処理、標準偏差算出処理等がそれぞれ行われ、これらの処理によって得られた値がクラス別地合指数DXnとして求められる。
【0135】
図17は、本発明の第6実施形態において観察した画像の一例を示す図である。また、図18は、図17に示す画像から求められる地合分布画像を示す図であり、図19は、図17に示す画像から求められるクラス別地合分布画像を示す図である。尚、図19(a)〜(h)は、クラスC1〜C8についてのクラス別地合分布画像をそれぞれ示している。
【0136】
図17に示す画像は、左上部分E1に大きなムラが存在し、右下部分E2に小さな黒点が存在する画像である。この図17に示す画像が本実施形態の地合検査装置に入力されると、地合分布画像生成部58において図18に示す地合分布画像が求められる。図18を参照すると、図17において大きなムラが存在している左上部分E1に対応する左上部分E11、及び、図17において小さな黒点が存在している右下部分E2に対応する右下部分E12の双方の地合指数が高いことを示す白丸部が現れており、両者を区別することは困難である。
【0137】
これに対し、図19を参照すると、図19(a),(b)に示されているクラスC1,C2のクラス別地合分布画像では、右下部分E12に明確な白丸が現れているが、左上部分E11に明確な白丸が現れているとは言い難い。これとは逆に、図19(f)〜(h)に示されているクラスC6〜C8のクラス別地合分布画像では、左上部分E11に明確な白丸が現れているが、右上部分E12に明確な白丸が現れているとは言い難い。尚、図19では図示を省略しているが、これらのクラス別地合分布画像からは、互いに値が異なるクラス別地合指数DX1〜DX8が求められることになる。このように、地合指数DXだけでは地合の目立ち方の種類やその発生原因の特定が困難であっても、クラス毎の地合指数DXnを算出して評価することにより、目立ち方の種類やその発生原因の特定が容易になる。
【0138】
図20は、本発明の第6実施形態で観察を行った複数の画像を示す図である。また、図21は、図20に示す画像の各々から求められるクラス別地合指数を示す図であって、(a)はクラス別地合指数DXnそのものを示す図であり、(b)はクラス別地合指数DXnを地合指数DXで除算した値を示す図である。尚、図21においては、図16に示すクラスの分類と同様の分類を行っているため、クラスC1に向かうほど高周波成分になり、クラスC9にむかうほど低周波成分になる。また、図21(a),(b)における凡例「a」〜「g」は、それぞれ図20(a)〜(g)に示す画像から得られたクラス別地合指数であることを示している。
【0139】
図20を参照すると、図20(a),(b)は、粒状の地合(細かなフロック)を観察した場合に得られる画像であり、図20(c),(e),(f)は、雲状の地合(大きなフロック)を観察した場合に得られる画像である。図21(a)を参照すると、図20(a)〜(g)に示される画像のうち、雲状の地合が最も大きな図20(f)の画像を観察した場合には、図20(f)の画像以外の他の画像を観察した場合よりも、飛び抜けて値が大きなクラス別地合指数DXnが得られることが分かる。
【0140】
また、図21(b)を参照すると、粒状の地合を観察した場合(例えば、図20(a),(b)に示される画像を観察した場合)には、高周波のクラス(例えば、クラスC1やクラスC2)の値が大きくなる傾向がある。これに対し、雲状の地合を観察した場合(例えば、図20(c),(e),(f)に示される画像を観察した場合)には、低周波のクラス(例えば、クラスC5やクラスC6)の値が大きくなる傾向がある。このため、クラス別地合指数DXnを参照することにより、検査対象物の地合の形状(粒度)を直感的に判断することができる。
【0141】
〔第7実施形態〕
図22は、本発明の第7実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。この図22に示す画像処理部34は、図15に示す画像処理部34と同様に、図1に示す透過光方式の地合検査装置1、図11に示す反射光方式の地合検査装置2、図12に示す両面同時検査が可能な地合検査装置3、及び図13に示す透過方式・反射方式の検査が可能な地合検査装置4の何れにも適用することができる。
【0142】
図22に示す通り、画像処理部34は、図15に示す画像処理部34と同様に、測定領域設定部41、画像補正部42、及び地合指数算出部80を備える構成である。但し、図1に示す画像処理部34では、乗算部57aの乗算結果が加算部57bとクラス別局所地合指数演算部81nとに出力され、クラス別局所地合指数演算部81nの演算結果がクラス別地合分布画像生成部82nのみに出力されていたのに対し、図22に示す画像処理部34では、乗算部57aの乗算結果がクラス別局所地合指数演算部81nのみに出力され、クラス別局所地合指数演算部81nの演算結果がクラス別地合分布画像生成部82nと加算部57bとに出力される点が相違する。
【0143】
以上の構成の相違は、図15に示す画像処理部34よりも地合指数DX及びクラス別地合指数DXnの算出に要する時間を短縮するためである。つまり、図15に示す画像処理部34では、乗算部57aの乗算結果を加算部57bで加算して局所地合指数Jiを求めるとともに乗算部57aの乗算結果をクラス毎に分類した上でクラス毎に加算してクラス別局所地合指数Jniを求めていた。ここで、図16を用いて説明した通り、二次元の周波数空間が重複しない領域のクラスに分類され、しかも各々のクラスについて規定される周波数重みデータWnが二値の値(例えば、値「0」と値「1」)をとる場合には、加算部57bで行われる加算処理とクラス別局所地合指数演算部81nで行われる加算処理は重複していると考えられる。本実施形態では、かかる重複した加算処理を省略することで、地合指数DX及びクラス別地合指数DXnを算出するのに要する時間の短縮を図っている。
【0144】
上記構成において、局所地合指数演算部57の乗算部57aで求められた空間周波数毎の乗算結果は、クラス別局所地合指数演算部81nに出力され、クラス別解析条件データD21に規定される周波数重みデータWnがクラス毎に乗算され、これにより得られた値がクラス毎に加算されることによってクラス別局所地合指数Jniが算出される。このクラス別局所地合指数Jniがクラス別地合分布画像生成部82nに出力されると、クラス別地合分布画像生成部82n及びクラス別地合分布統計演算部83nにおいて第6実施形態で説明した処理と同様の処理がそれぞれ行われてクラス別地合指数DXnが求められる。
【0145】
また、クラス別局所地合指数演算部81nで算出されたクラス別局所地合指数Jniは、局所地合指数演算部57の加算部57bに出力される。すると、加算部57bにおいて、全てのクラスのクラス別局所地合指数Jniを加算する処理が行われ、これにより地合指数Jiが算出される。このように、本実施形態では、クラス別局所地合指数演算部81nで算出されたクラス別局所地合指数Jniを加算して地合指数Jiを求めており、重複した加算処理(乗算部57aで求められた空間周波数毎の乗算結果を全て加算して地合指数Jiを求める処理)を省略することができるため、地合指数DX及びクラス別地合指数DXnを算出するのに要する時間を短縮することができる。
【0146】
〔第8実施形態〕
図23は、本発明の第8実施形態による地合検査装置が備える画像処理部の内部構成を示すブロック図である。図23に示す通り、画像処理部34は、測定領域設定部41、画像補正部42、及び地合指数算出部80に加えて、クラス別二値画像データ生成部91nとクラス影響度算出部92とを備える構成であり、地合指数DX及びクラス別地合指数DXnの算出に加えて、地合の目立ち方に対する各クラスの影響度の算出を可能とするものである。尚、各クラスの影響度を用いることによって、例えば紙Pの欠陥検出が可能となる。
【0147】
この図23に示す画像処理部34も、図15,図22に示す画像処理部34と同様に、図1に示す透過光方式の地合検査装置1、図11に示す反射光方式の地合検査装置2、図12に示す両面同時検査が可能な地合検査装置3、及び図13に示す透過方式・反射方式の検査が可能な地合検査装置4の何れにも適用することができる。
【0148】
クラス別二値画像データ生成部91nは、クラス別地合分布画像生成部82nで生成されるクラス別地合分布画像に対してそれぞれ閾値を設定し、例えばクラス別局所地合指数が閾値よりも大きくなる領域と、クラス別局所地合指数が閾値以下となる領域とを二値化処理等によりそれぞれ抽出する。そして、クラス毎に抽出した各々の領域を示すデータであるクラス別二値画像データをそれぞれ生成する。
【0149】
クラス影響度算出部92は、クラス別二値画像データ生成部91nで生成されるクラス別二値画像データとクラス別地合分布画像生成部82nで生成されるクラス別地合分布画像とから、地合の目立ち方に対する各クラスの影響度を算出する。具体的には、クラス別二値画像データ生成部91nで生成されるクラス別二値画像データをBnとし、クラス別地合分布画像生成部82nで生成されるクラス別地合分布画像をDnとすると、以下の(19)式から、地合の目立ち方に対する各クラスの影響度を示すクラス影響度判定画像Hを算出する。
【数19】
【0150】
上記構成において、記憶部33に記憶された画像データD1が読み出されて画像処理部34に入力されると、第6実施形態と同様の処理が行われて地合指数DX及びクラス別地合指数DXnが算出される。ここで、クラス別地合指数DXnの算出が行われる前に、クラス別地合分布画像生成部82nでクラス別局所地合指数の二次元分布を示すクラス別地合分布画像を生成する処理が行われる。
【0151】
クラス別地合分布画像生成部82nで生成されたクラス別地合分布画像は、クラス別二値画像データ生成部91nにそれぞれ入力され、所定の閾値を用いた二値化処理等が行われてクラス別二値画像データがそれぞれ生成される。次いで、クラス影響度算出部92において、クラス別地合分布画像生成部82nで生成されたクラス別地合分布画像と、クラス別二値画像データ生成部91nで生成されたクラス別二値画像データと用いて、上述した(19)式からクラス影響度判定画像Hを算出する処理が行われる。
【0152】
図24は、本発明の第8実施形態において求められるクラス影響度判定画像の一例を示す図である。尚、図24に示すクラス影響度判定画像は、図17に示す画像を観察して得られたものである。また、図24においては、各クラスにおける濃淡を示す凡例が画像の右側に付されている。図24を参照すると、例えば図17において大きなムラが存在している左上部分E1に対応する左上部分E11に現れる白丸は、その濃淡の度合からクラスC6,C7の影響度が大きいことが分かる。
【0153】
このように、本実施形態では、地合の目立ち方に対する各クラスの影響度を示すクラス影響度判定画像Hを算出しているため、地合の目立つ領域がどのクラスの影響を受けているのかを容易に判定することができる。尚、図24に示すクラス影響度判定画像に対して、第5実施形態で行われた欠陥領域、欠陥種類を判定する処理と同様の処理を行うことにより、本実施形形態においても紙Pの欠陥検出が可能になる。
【0154】
〔紙の製造工程〕
図25は、検査対象物としての紙の生産工程の概略を示す工程図である。図25に示す通り、紙の生産工程は、調合工程S1、フォーミング工程S2、プレス工程S3、ドライ工程S4、カレンダ工程S5、リール工程S6、及び裁断工程S7を有している。調合工程S1は紙の原料液を調合する工程であり、フォーミング工程S2は調合された紙原料液をヘッドボックスからワイヤ上或いは対のワイヤ間に噴出し、脱水機器により脱水して湿紙とする工程である。
【0155】
プレス工程S3は、フォーミング工程S2からの湿紙をフェルトにより圧搾する工程であり、ドライ工程S4は圧搾された湿紙を乾燥させる工程である。カレンダ工程S5は、乾燥された紙に対して紙厚や紙平滑等を調整する工程であり、リール工程S6は紙厚や紙平滑等が調整された紙を巻き取る工程である。裁断工程S7は、リール工程S6で巻き取られた紙を裁断する工程である。尚、リール工程S6で巻き取られた紙が製品として出荷される場合には、裁断工程S7は省略される。
【0156】
以上説明した第1〜第8実施形態による地合検査装置は、生産された製品を検査対象物としたオフライン装置として用いることも、図25に示す通り、生産工程における中間製品を検査対象物としたオンライン装置として用いることもできる。特に、オンライン装置として用いる場合には、図25中のフォーミング工程S2からリール工程S6までの各工程に設置することが可能である。
【0157】
第1〜第8実施形態による地合検査装置は何れも、検査領域内に局所領域を設定し、局所領域の各々で求められる局所地合指数の二次元分布を示す地合分布画像を生成している。このため、例えば、品質管理の観点からは、紙Pの地合のレベルに応じて裁断する領域を決定するといった裁断工程S7における支援効果が得られるとともに、悪い地合の領域を調合工程にリサイクルし、或いは市場に出さないようにすることで、原料費面での改善や出荷製品の品質を安定させる効果が得られる。また、第1〜第8実施形態による地合検査装置は何れも、裁断された製品の品質を地合のレベル毎に管理することができる。このため、裁断工程S6においては、地合のレベル毎に製品の用途を分類可能となる。
【0158】
また、制御管理の観点からは、例えば検査対象物の幅方向の各点における地合の変化のトレンドを解析して地合指数分布の経時変化を求め、地合領域の検査対象物の幅方向に対する顕在性や検査対象物の流れ方向に対する周期性を求めることで、品質を改善する効果が得られる。例えば、検査対象物の流れ方向に対する周期性を求め、前工程の調整対象を抽出し、その調整対象を調整(例えば、ヘッドボックスの速度調整や分布調整、各工程のローラの位置調整やローラ圧の調整等)することで、品質を改善する効果が得られ、地合指数を制御因子として活用することが可能になる。
【0159】
また、第6〜第8実施形態による地合検査装置は、地合指数DXに加えてクラス別地合指数DXnを算出している。このため、搬送される検査対象物を連続して測定すれば、クラス別地合指数DXnの経時変化を求めることができ、クラス別地合指数DXnの経時変化と抄紙工程の操業条件との関連性を容易に把握することができる。これにより、抄紙工程制御へのフィードバックやフィードバック手法の開発支援が可能になる。
【0160】
図26は、操業条件の変更に伴うクラス別地合指数DXnの変化例を示す図である。図26に示す例では、時刻t1で生じた操業条件の変更によってクラス別地合指数DXnが全体的に低下し、時刻t2で生じた操業条件の変更によってクラス別地合指数DXnが時刻t1以前の値と同程度まで上昇している。ここで、経験上、例えば調合工程S1では、ヘッドボックスの濃度増加によって雲状の地合(大きなフロック)が増大する反面、粒状の地合(細かなフロック)が減少するという傾向があり、フォーミング工程S2では、ヘッドボックスからの噴出速度の上昇によって中間的な周波数の強度が大きく変化する傾向があることが知られている。図26に示すクラス別地合指数DXnの経時変化を参照して調合工程S1やフォーミング工程S2の制御にフィードバックすれば、紙の地合を任意に制御することが可能になる。
【0161】
また、第6〜第8実施形態による地合検査装置で算出される地合指数DX及びクラス別地合指数DXnは何れも、検査対象物の目立ち度合(即ち、外観品質)である。このため、抄紙工程における各工程の前後(例えば、ドライ工程S4の前後、或いは、カレンダ工程S5の前後)で検査対象物の同じ位置を測定して比較評価することで、その工程の操業条件の外観品質に対する関連性をクラス毎に把握することができる。これにより、抄紙工程制御へのフィードバックやフィードバック手法の開発支援が可能になる。
【0162】
また、印刷工程においては、検査対象物の同じ位置を測定して比較評価することで、印刷条件の外観品質に対する影響をクラス毎に把握することができる。これにより、印刷される側である検査体対象物(例えば、紙)の特性と、印刷により添加される側(例えば、インク)との相性の分析を可能にし、印刷適性改善のための要因抽出を支援することができる。
【0163】
図27は、印刷前に求められた地合指数又はクラス別地合指数と印刷後に行われた目視評価の結果との相関を説明するための図であって、(a)は地合指数DXと目視評価の結果との相関を示す図であり、(b)はクラス別地合指数DXnと目視評価の結果との相関を示す図である。尚、図27(b)においては、図示を簡略化するために、クラスC3,C4,C9についてのクラス別地合指数DX3,DX4,DX9と目視評価の結果との相関のみを図示している。
【0164】
上記の印刷前における地合指数又はクラス別地合指数は、例えば印刷が行われていない無地の紙を本発明の第6〜第8実施形態による地合検査装置で検査して求めたものである。また、上記の印刷後における目視評価の結果は、地合検査装置で検査された上記の無地の紙に対して均一なグレースケール画像を印刷したものの善し悪しを検査員が目視で評価することにより得られるものである。この目視評価は「1」から「8」までの8段階評価であって、値が小さくなるほど良好な評価であり、値が大きくなるほど悪い評価である。
【0165】
まず、図27(a)を参照すると、地合検査装置で得られた地合指数DXと目視検査による結果との相関を示す近似曲線Q11の相関係数R2は「0.79」であり、高い相関があることが分かる。次に、図27(b)を参照すると、クラス別地合指数DX3と目視評価の結果との相関を示す近似曲線Q21の相関係数R2は「0.79」であり、クラス別地合指数DX4と目視評価の結果との相関を示す近似曲線Q22の相関係数R2は「0.81」であり、それぞれ高い相関があることが分かる。
【0166】
これに対し、クラス別地合指数DX9と目視評価の結果との相関を示す近似曲線Q23の相関係数R2は、「0」に近い値であるため殆ど相関が無いことが分かる。このように、印刷前に求められたクラス別地合指数DXnと印刷後に行われた目視評価の結果との相関が高いクラスと相関が低いクラスとを抽出することができ、印刷適性改善に資することが可能である。
【0167】
以上、本発明の実施形態による地合検査装置及び地合検査方法について説明したが、本発明は上記実施形態に制限される訳ではなく、本発明の範囲内で自由に変更が可能である。例えば、上述した地合検査装置が備える画像処理部34は、ハードウェアにより実現することもできるが、ソフトウェアにより実現することもできる。つまり、記録媒体に記録されたプログラム(画像処理部34の機能を実現するプログラム)を読み出してコンピュータにインストールし、或いは、インターネット等のネットワークを介して記録媒体に記録されたプログラムと同様のプログラムをダウンロードしてコンピュータにインストールすることにより、画像処理部34をソフトウェアにより実現できる。
【0168】
また、上記実施形態では、画像入力装置20から出力される画像データを処理して地合指数DXやクラス別地合指数DXnを求める地合検査装置について説明した。しかしながら、地合検査装置は、必ずしも画像入力装置20を備えている必要はない。例えば、検査すべき画像を地合検査装置とは別体の画像入力装置で撮像しておき、この画像入力装置で撮像された画像の画像データを地合検査装置で処理して地合指数DXやクラス別地合指数DXnを求めるようにしても良い。
【0169】
また、上記実施形態では、MTF演算部56が、局所サイズ算出部53で設定された局所領域視角dh,dvとFFT演算部55で用いられる平均輝度LAiとを用いて、MTF画像M2iを生成する例について説明した。しかしながら、MTF演算部56を省略して、検査制御部35から画像処理部34の局所地合指数演算部57に対し、MTF画像を出力するようにしてもよい。
【符号の説明】
【0170】
1〜4 地合検査装置
20 画像入力装置
51 輝度変換部
52 観察輝度変換部
54 局所領域設定部
55 FFT演算部
56 MTF演算部
57 局所地合指数演算部
59 地合分布統計演算部
81n クラス別局所地合指数演算部
DX 地合指数
P 紙
【特許請求の範囲】
【請求項1】
シート状の検査対象物の一方面及び他方面の少なくとも一方が撮像された画像データに対する画像処理を行って求めた地合指数を用いて前記検査対象物の地合を検査する地合検査装置において、
前記画像データに対してFFT演算を行って空間周波数毎のコントラストを示す第1データを得る第1演算手段と、
前記第1演算手段で得られた第1データと、前記画像の明度及び前記画像に対する観察視野を考慮した空間周波数毎のコントラスト感度を示す第2データとを、空間周波数毎に乗算して加算することにより前記地合指数を算出する第2演算手段と
を備えることを特徴とする地合検査装置。
【請求項2】
前記第2演算手段は、前記第1演算手段で得られた第1データと前記第2データとを空間周波数毎に乗算して得られた値に対して所定の重み付けを行って加算することを特徴とする請求項1記載の地合検査装置。
【請求項3】
前記画像データを、前記画像の物理的な輝度を示す画像データに変換する変換手段を備えることを特徴とする請求項1又は請求項2記載の地合検査装置。
【請求項4】
前記画像の物理的な輝度が予め設定された基準輝度となるように、前記変換手段で変換された画像データを調整する調整手段を備えることを特徴とする請求項3記載の地合検査装置。
【請求項5】
前記変換手段で変換された画像データに対し、複数の局所領域を設定する設定手段と、
前記設定手段によって設定された局所領域毎に、前記第1,第2演算手段の各々による演算により求められた局所地合指数に対して所定の統計演算を行って前記地合指数を算出する統計演算手段と
を備えることを特徴とする請求項4記載の地合検査装置。
【請求項6】
前記第1データと前記第2データとを空間周波数毎に乗算することによって前記第2演算手段で得られる第3データを、予め規定された空間周波数の領域であるクラス毎に加算することにより、該クラス毎の地合指数を算出する第3演算手段を備えることを特徴とする請求項1から請求項5の何れか一項に記載の地合検査装置。
【請求項7】
前記第3演算手段は、前記第3データに対して前記クラス毎に規定された所定の重み付けを行って、前記クラス毎に加算することを特徴とする請求項6記載の地合検査装置。
【請求項8】
前記第1データと前記第2データとを空間周波数毎に乗算することによって前記第2演算手段で得られる第3データに対し、予め規定されたクラス毎に規定された重みデータを乗算して加算することにより、該クラス毎の地合指数を算出する第4演算手段を備えることを特徴とする請求項1から請求項5の何れか一項に記載の地合検査装置。
【請求項9】
前記第4演算手段は、前記第3データと前記重みデータとを乗算して得られる値に対して前記クラス毎に規定された所定の重み付けを行って、前記クラス毎に加算することを特徴とする請求項8記載の地合検査装置。
【請求項10】
シート状の検査対象物の一方面及び他方面の少なくとも一方の画像を示す画像データを取得し、該画像データに対する画像処理を行って求めた地合指数を用いて前記検査対象物の地合を検査する地合検査方法であって、
前記画像データに対してFFT演算を行って空間周波数毎のコントラストを示す第1データを得る第1ステップと、
前記画像の明度及び前記画像に対する観察視野を考慮した空間周波数毎のコントラスト感度を示す第2データを得る第2ステップと、
前記第1ステップで得られた第1データと前記第2ステップで得られた第2データとを、空間周波数毎に乗算して加算することにより前記地合指数を算出する第3ステップと
を有することを特徴とする地合検査方法。
【請求項1】
シート状の検査対象物の一方面及び他方面の少なくとも一方が撮像された画像データに対する画像処理を行って求めた地合指数を用いて前記検査対象物の地合を検査する地合検査装置において、
前記画像データに対してFFT演算を行って空間周波数毎のコントラストを示す第1データを得る第1演算手段と、
前記第1演算手段で得られた第1データと、前記画像の明度及び前記画像に対する観察視野を考慮した空間周波数毎のコントラスト感度を示す第2データとを、空間周波数毎に乗算して加算することにより前記地合指数を算出する第2演算手段と
を備えることを特徴とする地合検査装置。
【請求項2】
前記第2演算手段は、前記第1演算手段で得られた第1データと前記第2データとを空間周波数毎に乗算して得られた値に対して所定の重み付けを行って加算することを特徴とする請求項1記載の地合検査装置。
【請求項3】
前記画像データを、前記画像の物理的な輝度を示す画像データに変換する変換手段を備えることを特徴とする請求項1又は請求項2記載の地合検査装置。
【請求項4】
前記画像の物理的な輝度が予め設定された基準輝度となるように、前記変換手段で変換された画像データを調整する調整手段を備えることを特徴とする請求項3記載の地合検査装置。
【請求項5】
前記変換手段で変換された画像データに対し、複数の局所領域を設定する設定手段と、
前記設定手段によって設定された局所領域毎に、前記第1,第2演算手段の各々による演算により求められた局所地合指数に対して所定の統計演算を行って前記地合指数を算出する統計演算手段と
を備えることを特徴とする請求項4記載の地合検査装置。
【請求項6】
前記第1データと前記第2データとを空間周波数毎に乗算することによって前記第2演算手段で得られる第3データを、予め規定された空間周波数の領域であるクラス毎に加算することにより、該クラス毎の地合指数を算出する第3演算手段を備えることを特徴とする請求項1から請求項5の何れか一項に記載の地合検査装置。
【請求項7】
前記第3演算手段は、前記第3データに対して前記クラス毎に規定された所定の重み付けを行って、前記クラス毎に加算することを特徴とする請求項6記載の地合検査装置。
【請求項8】
前記第1データと前記第2データとを空間周波数毎に乗算することによって前記第2演算手段で得られる第3データに対し、予め規定されたクラス毎に規定された重みデータを乗算して加算することにより、該クラス毎の地合指数を算出する第4演算手段を備えることを特徴とする請求項1から請求項5の何れか一項に記載の地合検査装置。
【請求項9】
前記第4演算手段は、前記第3データと前記重みデータとを乗算して得られる値に対して前記クラス毎に規定された所定の重み付けを行って、前記クラス毎に加算することを特徴とする請求項8記載の地合検査装置。
【請求項10】
シート状の検査対象物の一方面及び他方面の少なくとも一方の画像を示す画像データを取得し、該画像データに対する画像処理を行って求めた地合指数を用いて前記検査対象物の地合を検査する地合検査方法であって、
前記画像データに対してFFT演算を行って空間周波数毎のコントラストを示す第1データを得る第1ステップと、
前記画像の明度及び前記画像に対する観察視野を考慮した空間周波数毎のコントラスト感度を示す第2データを得る第2ステップと、
前記第1ステップで得られた第1データと前記第2ステップで得られた第2データとを、空間周波数毎に乗算して加算することにより前記地合指数を算出する第3ステップと
を有することを特徴とする地合検査方法。
【図1】

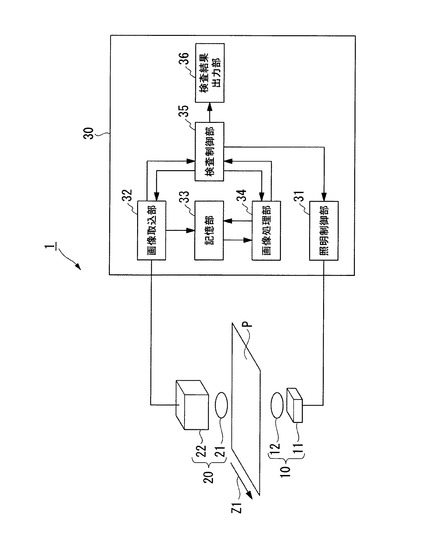
【図2】
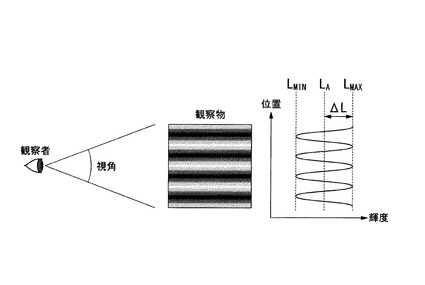
【図3】
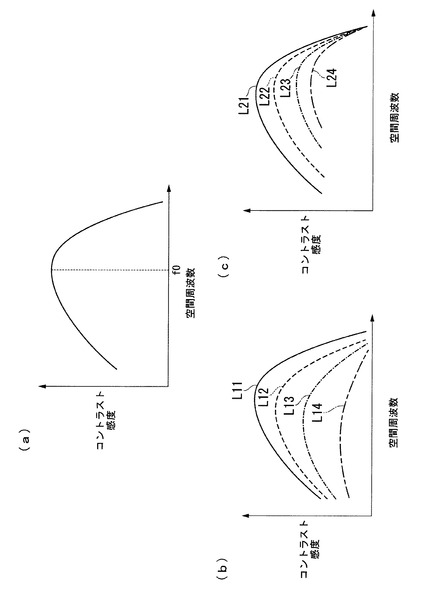
【図6】
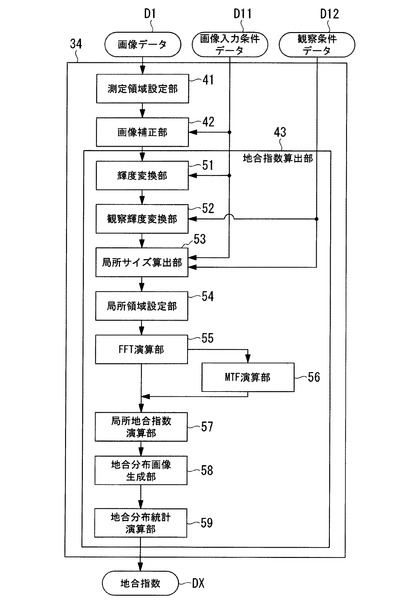
【図9】
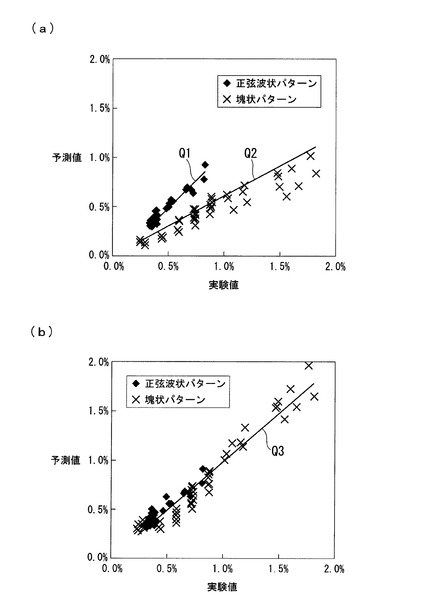
【図11】
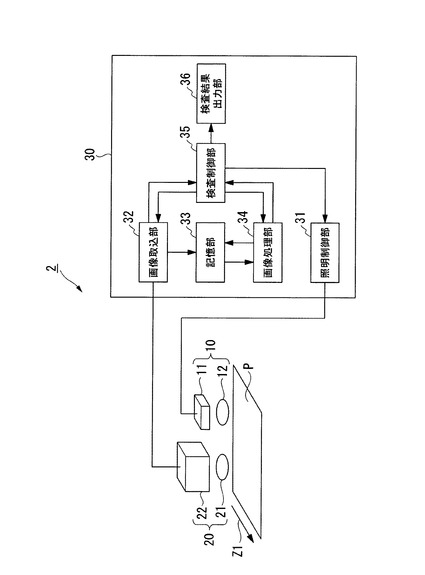
【図12】
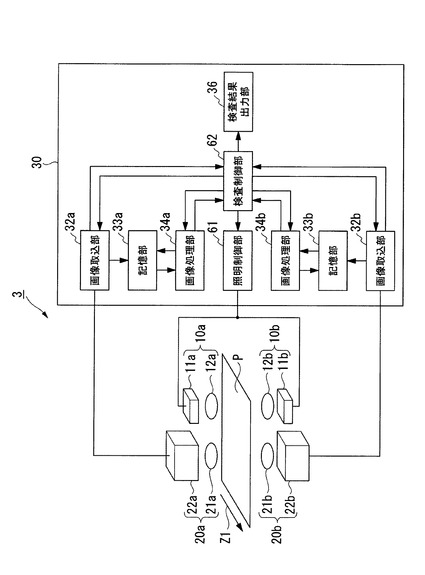
【図13】
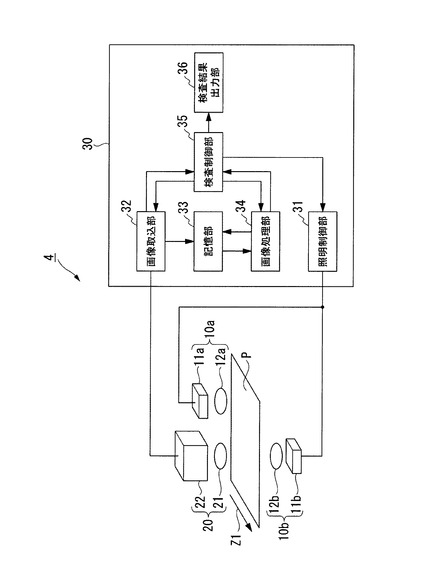
【図14】
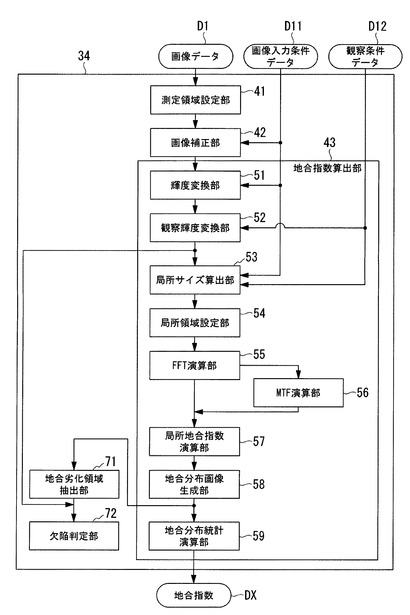
【図15】
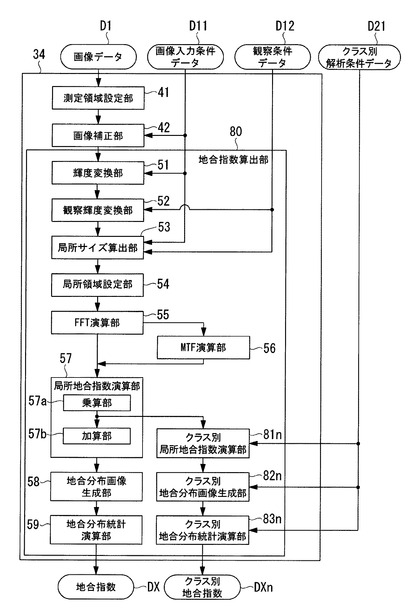
【図16】
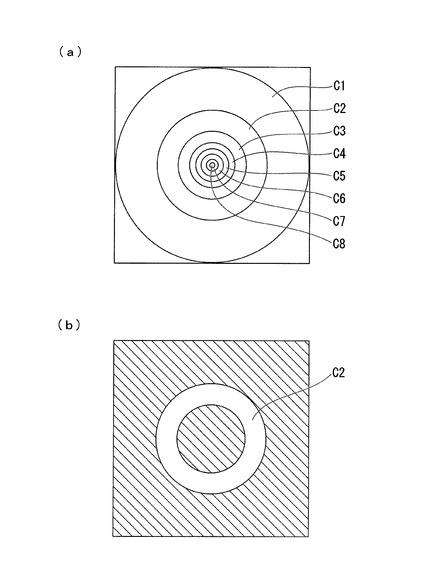
【図21】
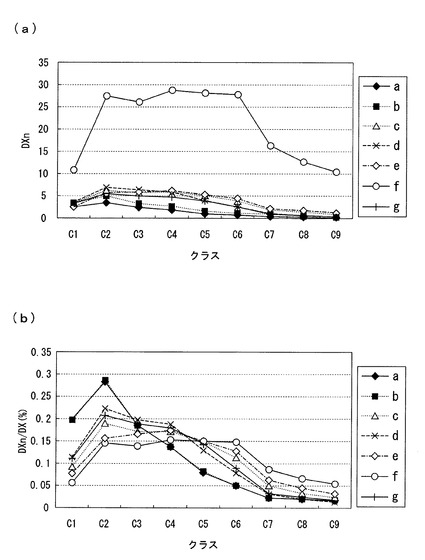
【図22】
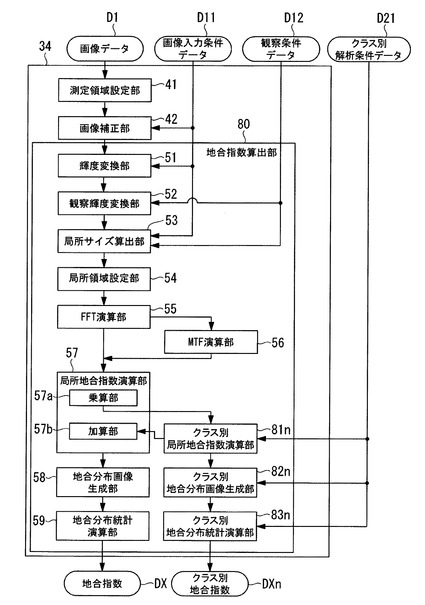
【図23】
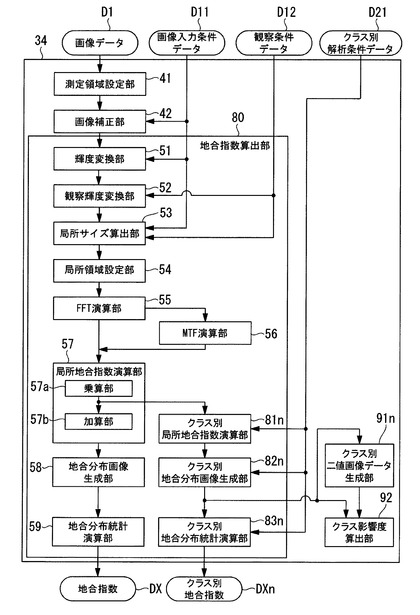
【図25】
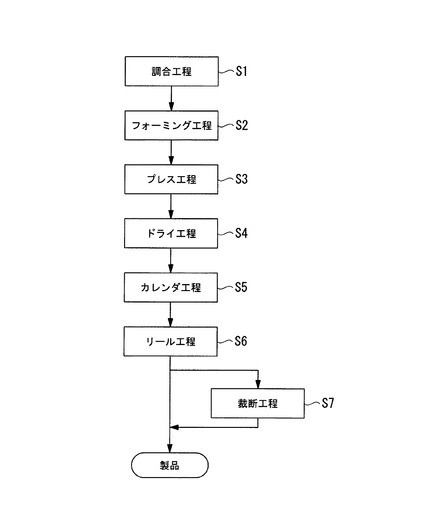
【図26】
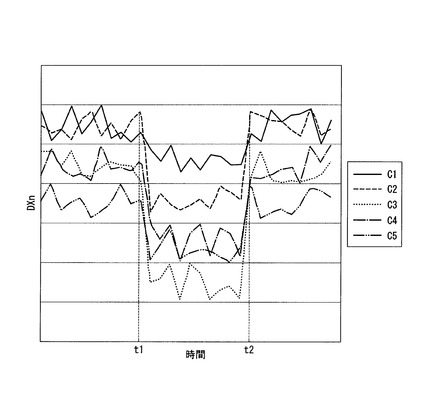
【図27】
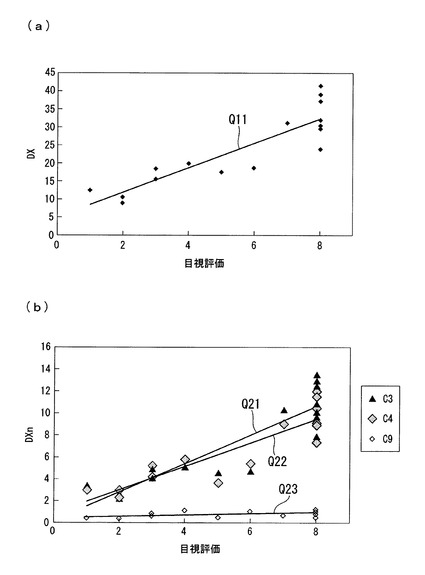
【図4】
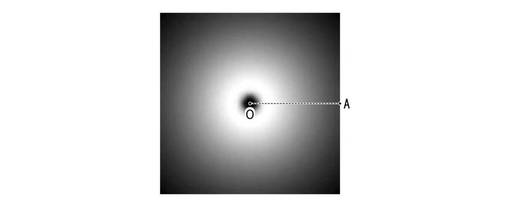
【図5】
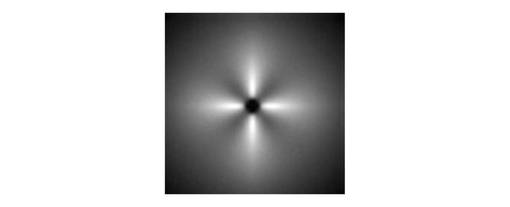
【図7】
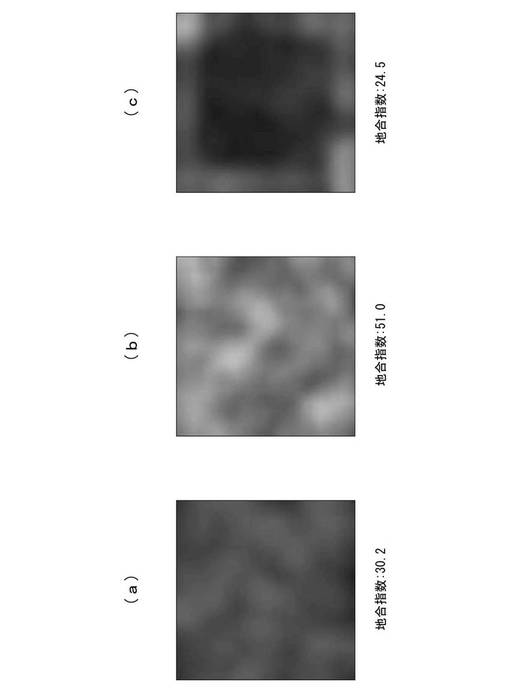
【図8】
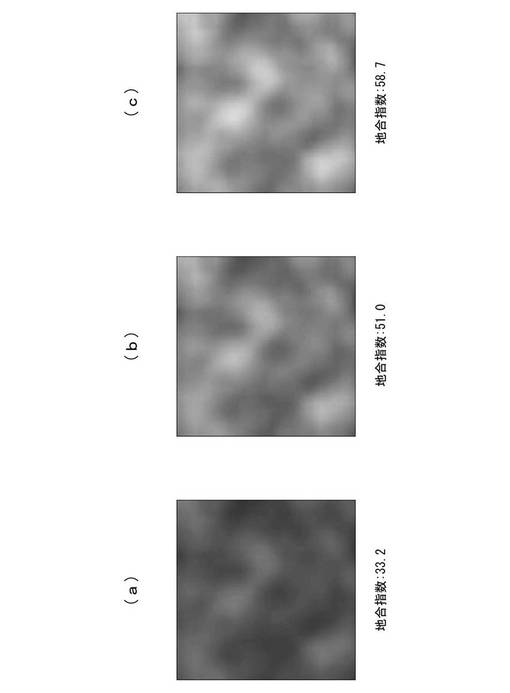
【図10】
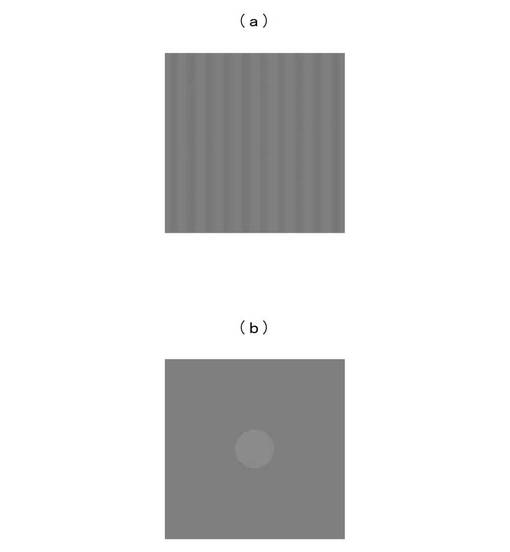
【図17】

【図18】
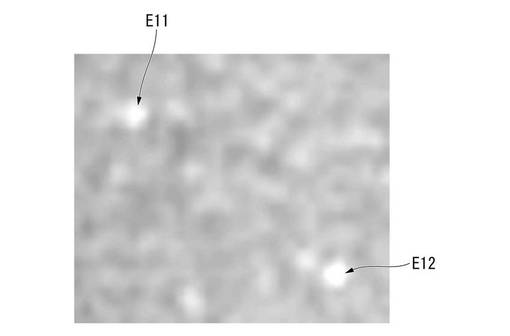
【図19】
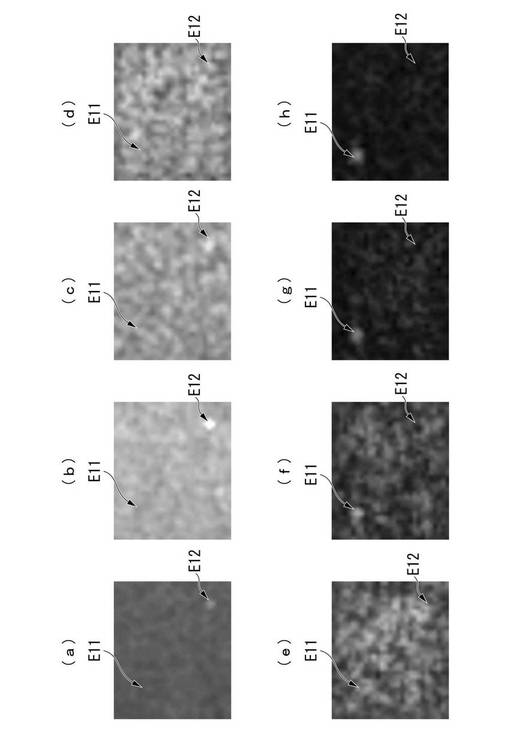
【図20】
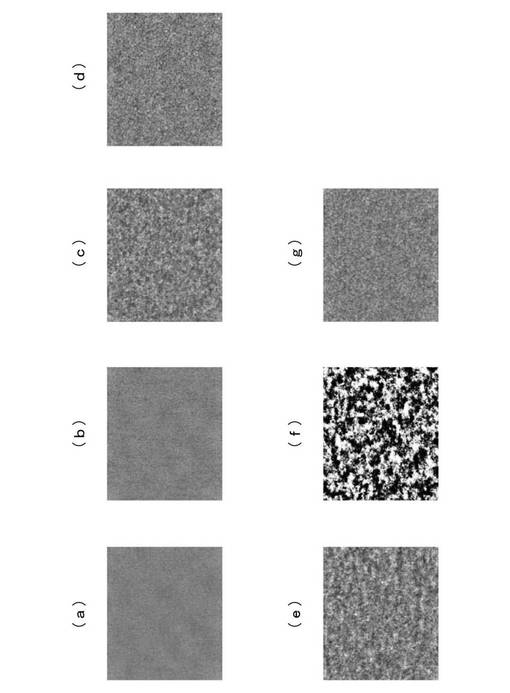
【図24】
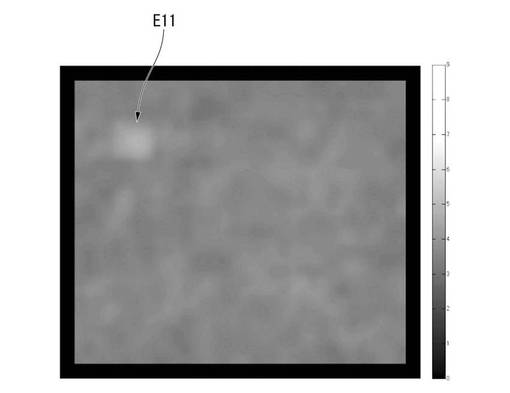
【図28】
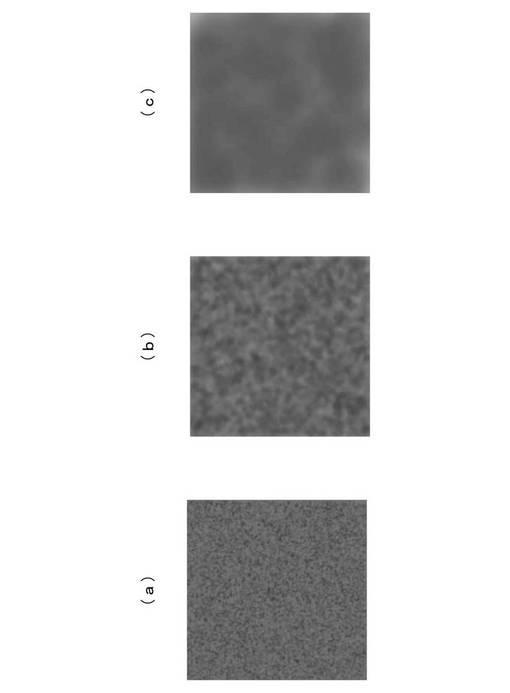
【図29】
【図2】
【図3】
【図6】
【図9】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図21】
【図22】
【図23】
【図25】
【図26】
【図27】
【図4】
【図5】
【図7】
【図8】
【図10】
【図17】
【図18】
【図19】
【図20】
【図24】
【図28】
【図29】
【公開番号】特開2012−251988(P2012−251988A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2011−191565(P2011−191565)
【出願日】平成23年9月2日(2011.9.2)
【出願人】(000006507)横河電機株式会社 (4,443)
【Fターム(参考)】
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願日】平成23年9月2日(2011.9.2)
【出願人】(000006507)横河電機株式会社 (4,443)
【Fターム(参考)】
[ Back to top ]