
地図作成方法とロボットの移動経路決定方法

【課題】地図情報の作成及び教示を極めて簡単かつ直観的な操作により実現する。
【解決手段】ユーザは複数のランドマーク装置を任意の位置に配置する。設置が完了すると、各ランドマーク装置が周囲のランドマーク装置の番号とその方位を調査して隣接装置情報を生成し、さらにランドマーク装置同士が隣接装置情報を交換することによって自動的に地図情報が生成される。その後、ロボットに対しゴール地点のランドマーク装置の番号を指示すると、ロボットは最寄りのランドマーク装置からゴール地点までの経路を計算し、ランドマーク装置を順に辿ることでゴール地点に到達する。
【解決手段】ユーザは複数のランドマーク装置を任意の位置に配置する。設置が完了すると、各ランドマーク装置が周囲のランドマーク装置の番号とその方位を調査して隣接装置情報を生成し、さらにランドマーク装置同士が隣接装置情報を交換することによって自動的に地図情報が生成される。その後、ロボットに対しゴール地点のランドマーク装置の番号を指示すると、ロボットは最寄りのランドマーク装置からゴール地点までの経路を計算し、ランドマーク装置を順に辿ることでゴール地点に到達する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロボットの移動経路の決定に利用する地図情報を作成するための技術、並びに、その地図情報を利用してロボットの移動経路を決定するための技術に関する。
【背景技術】
【0002】
ロボットに対しゴール(行先)を指定するだけで、ロボット自身が自動的に経路を計算しゴールへと移動する自律型のロボットが知られている。このような動作を実現するには、ロボットが移動する環境(エリア)内の地図情報を予め作成しロボットに教示しておく必要がある。そのための方法の一つとして、ロボット自身に環境内をくまなく移動(探索)させ地図を作成させるという方法が提案されている(非特許文献1参照)。しかしこの方法は、地図作成のために一定の探索時間がかかるため、新しい環境にロボットを導入する際に直ぐに使用できないという問題がある。しかも、探索により得られるのは、ロボットの移動可能範囲を示す内部的なデータにすぎない。例えば「キッチン」とか「リビング」のように場所の名称等で行先を指定できるようにするには、ロボットの内部的なデータに対して場所の名称(意味)を対応付ける処理が必要となるが(これを「ラベリング問題」とよぶ。)、この作業をユーザに行わせることは案外難しい。別の方法として、天井カメラや無線システムなどのセンサを用いてロボットの位置を監視する方法も知られている。しかしこの種のシステムは、センサ設備の設置やキャリブレーションが面倒であり、特に家庭用のロボットには導入が難しい。またこの方法でも上述したラベリング問題は解決されない。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】J. J. Leonard and H. F. Durrant-whyte, “Simultaneous map building and localization for an autonomous mobile robot,” Proc. IEEE/RSJ International Workshop on Intelligent Robots and Systems (IROS 91), vol. 3, pp. 1442-1447, 1991
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、地図情報の作成及び教示を極めて簡単かつ直観的な操作により実現することのできる技術を提供することにある。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本発明に係る地図作成システムは、ロボットが環境内を移動する際の経路決定に利用する地図情報を作成するための地図作成システムであって、互いに異なる識別子が付与された複数のランドマーク装置から構成され、前記複数のランドマーク装置はユーザによって前記環境内の任意の位置に配置されるものであり、各ランドマーク装置は、自装置の周囲に配置された隣接ランドマーク装置との間で光無線通信を行う通信手段と、光無線通信により隣接ランドマーク装置の識別子を取得すると共に、その隣接ランドマーク装置の自装置に対する方位を検出する検出手段と、自装置の識別子と隣接ランドマーク装置の識別子及び方位とを含む隣接装置情報を生成する情報生成手段と、を有しており、前記複数のランドマーク装置が隣接装置情報を光無線通信で互いに交換し合うことによって、前記複数のランドマーク装置の間の相対的な位置関係を表す地図情報を作成することを特徴とするものである。
【0006】
この構成によれば、ユーザの具体的な作業は、ロボットの行先や経路になりそうなところに、適当な間隔で(=1つ以上のランドマーク装置と光無線通信が可能なロケーションに)ランドマーク装置を設置する、という簡単かつ直観的な作業だけですむ。これだけで、ランドマーク装置同士が互いの位置関係を理解し、自動的に地図情報を作成してくれるため、システムの導入が極めて容易である。また、ランドマーク装置同士が情報交換するだけで地図情報が完成するので、地図情報の作成に要する準備時間を極めて短縮できる。
【0007】
ここで「光無線通信」とは、赤外線から可視光線までの波長の電磁波(光線)を利用した無線通信のことであり、典型的には赤外線通信を利用することができる。光無線通信を利用することにより、ランドマーク装置を小型化できる、指向性が高いため隣接ランドマーク装置の方位検出に利用できる、などの利点がある。また、光無線通信ができるということはランドマーク装置間に障害物がないことを意味するので、光無線通信の可否でランドマーク装置の隣接関係を認識し地図情報を作成することで、経路上に障害物がないことを保証する効果もある。
【0008】
上記構成において、前記通信手段は、装置本体に対して異なる方位に向けて取り付けられている複数の受光部を有しており、前記検出手段は、前記複数の受光部における受信状態に基づいて隣接ランドマーク装置の方位を検出するものであることが好ましい。このように光無線通信のデバイスを方位検出に利用することで、ランドマーク装置の小型化及びコスト低減が可能となる。
【0009】
また本発明に係るロボットシステムは、ロボットと上述した地図作成システムとを有するシステムであって、前記ロボットは、移動機構と、前記地図作成システムのランドマーク装置との間で光無線通信を行う通信手段と、いずれか1つのランドマーク装置の識別子をゴール地点としてユーザに指定させるゴール指定手段と、最寄りのランドマーク装置から光無線通信により地図情報を取得すると共に、取得した地図情報とゴール地点に指定されたランドマーク装置の識別子とに基づいて、最寄りのランドマーク装置からゴール地点に指定されたランドマーク装置に至るまでに辿るランドマーク装置の順番を経路として計算する経路計算手段と、前記経路計算手段により得られた経路に従って前記ロボットが移動するように前記移動機構を制御する制御手段と、を有することを特徴とするものである。
【0010】
この構成によれば、ユーザはゴール地点となるランドマーク装置の識別子をロボットに指示するという簡単かつ直観的な操作ですむ。しかも、ランドマーク装置自体が物理的なラベルとしての役割も果たしているために、従来必要とされていたラベリング処理(地図情報と場所の対応付け)が不要となる。どの識別子のランドマーク装置をどの場所に置いたかということだけを憶えておけば足りる。
【0011】
なお、本発明は、上記手段の少なくとも一部を有する地図作成システムやロボットシステムとして捉えることができる。また、本発明は、上記処理の少なくとも一部を含む地図作成方法、ロボットの移動経路決定方法、ロボットの制御方法などとしても捉えることもできるし、それらの方法のうちの情報処理のステップをコンピュータに実行させるためのプログラムや同プログラムを記録した記録媒体として捉えることもできる。
【0012】
例えば、本発明の一態様としての地図作成方法は、ロボットが環境内を移動する際の経路決定に利用する地図情報を作成するための地図作成方法であって、ユーザが、互いに異なる識別子が付与された複数のランドマーク装置を、前記環境内の任意の位置に配置する工程と、各ランドマーク装置が、自装置の周囲に配置された隣接ランドマーク装置との間で光無線通信を行うことにより隣接ランドマーク装置の識別子を取得すると共に、その隣接ランドマーク装置の自装置に対する方位を検出する工程と、各ランドマーク装置が、自
装置の識別子と隣接ランドマーク装置の識別子及び方位とを含む隣接装置情報を生成する工程と、前記複数のランドマーク装置が隣接装置情報を光無線通信で互いに交換し合うことによって、前記複数のランドマーク装置の間の相対的な位置関係を表す地図情報を作成する工程と、を有することを特徴とするものである。
【0013】
また、本発明の一態様としてのロボットの移動経路決定方法は、上記の地図作成方法によって、予め複数のランドマーク装置を配置すると共に、前記複数のランドマーク装置の間の相対的な位置関係を表す地図情報を作成する工程と、ユーザが、ロボットに対して、いずれか1つのランドマーク装置の識別子をゴール地点として指定する工程と、ロボットが、最寄りのランドマーク装置から光無線通信により地図情報を取得する工程と、ロボットが、取得した地図情報とゴール地点に指定されたランドマーク装置の識別子とに基づいて、最寄りのランドマーク装置からゴール地点に指定されたランドマーク装置に至るまでに辿るランドマーク装置の順番を経路として計算する工程と、を有することを特徴とするものである。
【発明の効果】
【0014】
本発明によれば、地図情報の作成及び教示を極めて簡単かつ直観的な操作により実現することができる。
【図面の簡単な説明】
【0015】
【図1】ロボットシステムの概要を模式的に示す図。
【図2】ロボットとランドマーク装置の構成を示す図。
【図3】ランドマーク装置による地図作成処理を示す図。
【図4】ロボットの経路決定及び移動に関するフローチャート。
【発明を実施するための形態】
【0016】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0017】
<システムの概要>
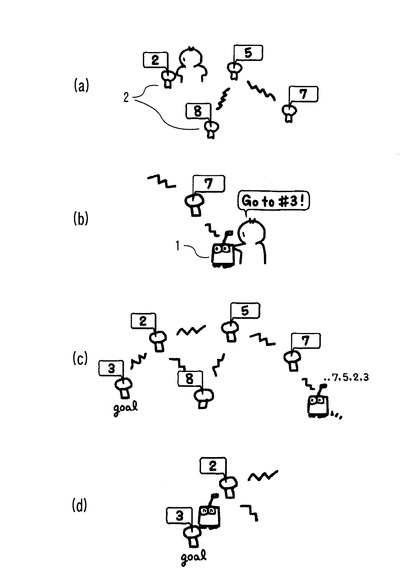
図1は、本発明の実施形態に係るロボットシステムの概要を模式的に示す図である。このロボットシステムは、移動機構をもつロボット1と複数のランドマーク装置2とから構成される。ロボット1と各ランドマーク装置2は光無線通信(本実施形態では赤外線通信)によって互いにデータを送受信可能である。各ランドマーク装置2には一意の識別子が付与されており、本実施形態では識別子として識別番号(数字)が割り当てられている。以下、識別番号Nのランドマーク装置2を「ランドマーク装置2−N」のように表記することとする。
【0018】
家庭用の搬送ロボット1を自宅に導入する例を用いて、図1の説明を行う。ユーザはまず、(a)に示すように、各ランドマーク装置2を床上の任意の位置に配置する。例えばロボット1の移動範囲として、キッチン、リビング、ダイニング、ベッドルーム、及び、各部屋を結ぶ廊下を想定している場合には、各部屋と廊下に適当な間隔でランドマーク装置2を配置する。このとき、隣接するランドマーク装置2の間に障害物が存在しないように配慮する。設置が完了すると、各ランドマーク装置2が自分の周りに存在するランドマーク装置2の識別番号とその方位を調査して隣接装置情報を生成し、さらにランドマーク装置2同士が隣接装置情報を交換することによって自動的に地図情報(ランドマーク装置間の相対的な位置関係を示す情報)を生成する。これで導入準備は完了である。
【0019】
ロボット1をキッチンに移動させたい場合には、(b)に示すように、キッチンに置かれたランドマーク装置2−3の識別番号「3」をロボット1に指示する。そうすると、(c)に示すように、ロボット1は最寄りのランドマーク装置2−7から地図情報を受信し
、最寄りのランドマーク装置2−7からゴール地点のランドマーク装置2−3に至るまでの経路を計算する。(c)の例では、7→5→2→3という移動経路が選ばれている。その後、ロボット1は各ランドマーク装置2と通信を行いながら、7→5→2→3の順にランドマーク装置2を辿ることで、(d)に示すようにゴール地点であるキッチンに到達することができる。
【0020】
<装置構成>
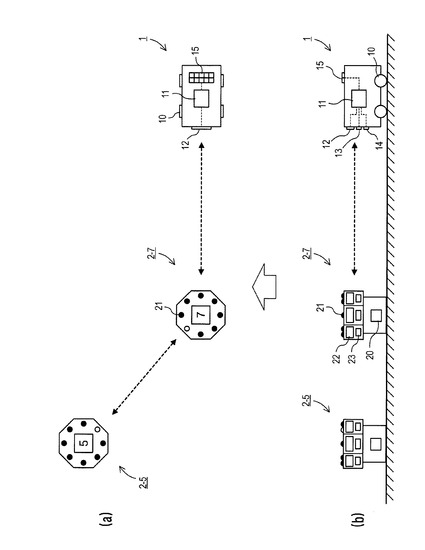
次に、図2を参照して、ロボット1及びランドマーク装置2の構成について説明する。図2の(a)は平面図、(b)は(a)を矢印の方向からみた側面図である。
【0021】
ロボット1は、車輪、駆動モータ等から構成される移動機構10と、経路計算や移動機構の制御等を行うマイクロコントローラ11とを備える自走式のロボットである。このロボット1は、その進行方向前方に赤外線受光部12、赤外線LED13、及びカメラ14を有している。赤外線受光部12及び赤外線LED13はランドマーク装置2との間で赤外線通信を行う通信手段を担うものである。またカメラ14で取り込まれる画像は、マイクロコントローラ11において、ランドマーク装置2までの距離を測定(推定)する目的や障害物を検出する目的などに利用される。さらにロボット1の本体には複数のボタン15(ゴール指定手段)が設けられている。各ボタン15はランドマーク装置2と一対一に対応付けられており、例えば「3」が付されたボタン15を押すと識別番号「3」のランドマーク装置2−3がゴール地点に設定されるようにプログラムされている。ロボット1は上記構成の他にも使用目的に応じたオプション構成(例えば物を把持するアームなど)を備えることもあるが、ここでは説明を省略する。
【0022】
ランドマーク装置2は、床(ロボット1が移動する平面)上に設置される小型のデバイスである。各ランドマーク装置2は同一の構成を有しており、本実施形態では、8個の赤外線受光部22、8個の赤外線LED23、8個のインジケータLED21、及び、これらを制御するマイクロコントローラ20を備えて構成されている。赤外線受光部22及び赤外線LED23は隣接するランドマーク装置2との間又はロボット1との間で赤外線通信を行う通信手段を担うものである。図2(a)に示すように8組の赤外線受光部22及び赤外線LED23がランドマーク装置2の外周に等配されており、全方位の相手と通信可能な構成となっている。ここでは38kHzの変調信号による赤外線通信モジュールを用いる。
【0023】
各ランドマーク装置2は、一定の時間間隔で赤外線LED23からデータ送信を行っている。初期状態では自装置の識別番号のみを送信するが、後述する隣接装置情報や地図情報が得られた後はそれらのデータを送信する。一方、各ランドマーク装置2は、赤外線受光部22において周囲に存在する隣接ランドマーク装置2からデータを受信し、隣接ランドマーク装置2の識別番号や隣接装置情報等を取得する。
【0024】
また本実施形態では、赤外線通信の受信状態を隣接ランドマーク装置2の方位検出に利用する。方位検出の原理について図2(a)を参照して説明する。ランドマーク装置2−5から送信された赤外線信号は、ランドマーク装置2−7の赤外線受光部22にて受信される。このとき8個すべての赤外線受光部22で信号が受信されるわけではなく、ランドマーク装置2−5の方を向いている赤外線受光部22でのみ信号が検知される。これは赤外線の直進性及び指向性が非常に高いためである。従って、各赤外線受光部22における信号強度を比較したり、受信に成功した頻度を比較することで、赤外線信号の到来方向、つまり自装置に対する隣接ランドマーク装置の方位を推定することができる。図2(a)の例では、図の左上の赤外線受光部22での受信状態が最良となり、ランドマーク装置2−7からみて図の左上の方位にランドマーク装置2−5が存在することを検出できる。なお赤外線受光部22における信号強度の分解能を高めたり、赤外線受光部22の数を増や
すことで、方位分解能を上げることが可能である。
【0025】
インジケータLED21は、検出された隣接ランドマーク装置2の方位を表示するためのインジケータである。図2(a)の例では、ランドマーク装置2−7の8個のインジケータLED21のうち左上の1つが点灯状態となっている。このインジケータLED21は主にユーザ確認のために利用される。例えば、ランドマーク装置2−5,2−7を設置したときに両者のインジケータLED21が点灯しなかった場合には、ランドマーク装置2−5,2−7の間の通信状態が不良であるという意味なので、装置の向きや間隔を調整する必要があることが分かる。
【0026】
<地図作成処理>
次に、図3を参照して、ランドマーク装置による地図作成処理について説明する。図3において、○で示した図形がランドマーク装置を表し、図形中の数字がランドマーク装置の識別番号を表している。また点線は隣接関係を示しており、点線で結ばれたランドマーク装置同士は隣接している(=通信可能であること)を表している。
【0027】
(a)に示すように、ランドマーク装置2−2及び2−8を配置したとする。各ランドマーク装置2−2,2−8は周囲に向けて自分の識別番号を送信する。これにより、ランドマーク装置2−2は45°の方位に隣接ランドマーク装置2−8が存在することを認識し、ランドマーク装置2−8は30°の方位に隣接ランドマーク装置2−2が存在することを認識する。隣接ランドマーク装置を検出すると、各ランドマーク装置は隣接装置情報を作成する。隣接装置情報とは、自装置の識別番号、バージョン、隣接ランドマーク装置の識別番号及び方位から構成される情報である。(a)の段階では、ランドマーク装置2−2において「ID2,ver1,8−45」という内容の隣接装置情報が生成され、ランドマーク装置2−8において「ID8,ver1,2−30」という内容の隣接装置情報が生成される。なお方位は自装置の基準方向に対する相対角度で表される。
【0028】
その後、(b)に示すように、各ランドマーク装置2−2,2−8は隣接装置情報を交換し、自装置の隣接装置情報に他の装置の隣接装置情報を追加してメモリに保存する。このようにして得られる隣接装置情報のリスト(テーブル)は、ネットワークを構成する全てのランドマーク装置の相対的な位置関係を表すデータであり、本システムにおいて地図情報として利用される。
【0029】
続いて、(c)〜(e)を用いてランドマーク装置の構成に変化が起きた時の地図情報の更新処理を説明する。(c)に示すように、ランドマーク装置2−3が追加で設置されると、ランドマーク装置2−3では「ID3,ver1,2−220」という内容の隣接装置情報が生成される。一方、ランドマーク装置2−2では、既存の隣接装置情報にランドマーク装置2−3の情報「3−305」が追加されると共に、バージョン番号がインクリメントされ「ver2」となる。その後、(d)及び(e)に順に示すように、ランドマーク装置2−2,2−3,2−8の間で隣接装置情報の交換が繰り返され、各装置内の地図情報が最新のものに書き変わる。
【0030】
なお、隣接装置情報にバージョン番号を含めた理由は、隣接装置情報のコンフリクトを解決するためである。例えば(c)の配置において、ランドマーク装置2−3と2−8が通信可能であった場合には、ランドマーク装置2−3は、装置2−2から「ID2,ver2,8−45,3−305」を受信する一方で、装置2−8から「ID2,ver1,8−45」を受信する可能性がある。このように同じ識別番号に関する隣接装置情報を受信したときには、バージョンの新しいものを採用することで、地図情報の更新処理を正しく行うことができる。
【0031】
<ロボットの動作>
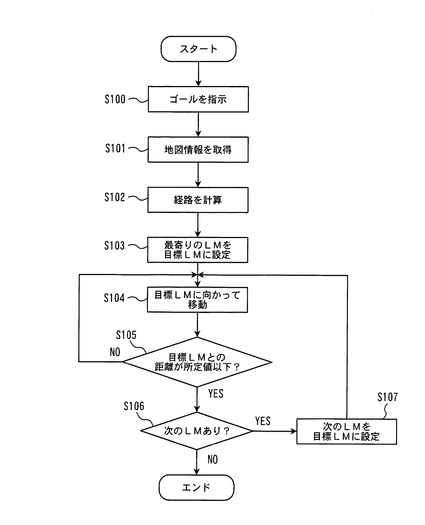
次に、図4のフローチャートを参照して、ロボット1の経路決定及び移動に関する処理について説明する。なおランドマーク装置2による地図作成処理は予め完了し、ネットワークを構成する全てのランドマーク装置2が地図情報を共有している状態にあるものとする。なお図4では「ランドマーク装置」を「LM」と略記している。
【0032】
(S100)ユーザがロボット1のボタン15を押して、ゴール地点とすべきランドマーク装置2の識別番号をロボット1に指示する。
【0033】
(S101)ロボット1は、周囲のランドマーク装置2と赤外線通信を行い、地図情報を取得する。このとき、赤外線受光部12における信号強度や受信頻度などに基づき、ロボット1は最寄りの(最近接の)ランドマーク装置2を認識する。
【0034】
(S102)次に、ロボット1は、地図情報に含まれるランドマーク装置同士の隣接関係に基づいて、最寄りのランドマーク装置から、ゴール地点のランドマーク装置までの経路を計算する。ここでは、経由するランドマーク装置の数が最小となるように経路を決定する。もし経由数が同じ経路が複数存在した場合には、ロボット1の方向転換が最も小さくなる経路を選択すればよい。
【0035】
(S103)移動経路が決定したら、ロボット1はまず最寄りのランドマーク装置を目標ランドマーク装置に設定する。
【0036】
(S104)そして、ロボット1は目標ランドマーク装置に向かって移動を行う。このとき、ロボット1は、赤外線受光部12で目標ランドマーク装置からの赤外線信号を検知することで、移動方向の決定及び修正を行う。
【0037】
(S105)ロボット1は一定時間ごとにカメラ14から画像を取り込み、所定の画像処理を施すことで、ロボット1と目標ランドマーク装置との距離を計算する。その距離が所定値以下となるまで、ロボット1は移動を続ける。
【0038】
(S106)目標ランドマーク装置までの距離が所定値以下となったら、ロボット1はS102で決定した経路情報を参照して、次のランドマーク装置があるかどうかを判断する。
【0039】
(S107)次のランドマーク装置が存在する場合、ロボット1はそのランドマーク装置を次の目標ランドマーク装置に設定する。そして、ロボット1は、地図情報を参照して、現在地に対する次の目標ランドマーク装置の方位を計算し、その方位に向かうよう方向転換を行い、移動を継続する。なおロボット1が次の目標ランドマーク装置からの赤外線信号を受信すれば、移動方向は適宜修正されるため、S107での方位計算はさほど厳密でなくてよい。
【0040】
S104〜S107の処理を繰り返し、ゴール地点のランドマーク装置に到着すると、S106でNO判定となり、ロボット1は移動を停止する。
【0041】
<本システムの優れた利点>
以上述べた本実施形態のシステムによれば、地図作成のために必要な作業は、ロボットの行先や経路になりそうなところに、適当な間隔でランドマーク装置を設置する、という簡単かつ直観的な作業だけですむ。これだけで、ランドマーク装置同士が互いの位置関係を理解し、自動的に地図情報を作成してくれるため、システムの導入が極めて容易である。また、ランドマーク装置同士が情報交換するだけで地図情報が完成するので、地図情報
の作成に要する準備時間を極めて短縮できる。しかも、ランドマーク装置自体が物理的なラベルとしての役割も果たしているために、従来必要とされていたラベリング処理(地図情報と場所の対応付け)が不要となる。ユーザは、どの識別番号のランドマーク装置をどの場所に置いたかということだけを憶えておけばよい。
【0042】
また本実施形態では、ランドマーク装置間の通信に赤外線通信を利用したことで、ランドマーク装置の小型化及びコスト低減を図ることができると共に、隣接ランドマーク装置の方位検出に利用できるという利点がある。また、赤外線通信ができるということはランドマーク装置間に障害物がないことを意味するので、赤外線通信の可否でランドマーク装置の隣接関係を認識し地図情報を作成することで、経路上に障害物がないことを保証する効果もある。
【0043】
<変形例>
なお、上記実施形態は本発明の一具体例を例示したものにすぎない。本発明の範囲は上記実施形態に限られるものではなく、その技術思想の範囲内で種々の変形が可能である。例えば上記実施形態では赤外線通信を利用したが、可視光を用いた無線通信を用いることもできる。またロボットの赤外線受光部を前方だけでなく、複数の方向に設けることも好ましい。またロボットの移動機構は車輪に限らず、脚や浮上装置のような移動機構を設けることもできる。またカメラによる画像センサではなく、他の方式のセンサを距離測定や障害物検知に用いることもできる。
【符号の説明】
【0044】
1:ロボット
2:ランドマーク装置
10:移動機構
11:マイクロコントローラ
12:赤外線受光部
13:赤外線LED
14:カメラ
15:ボタン
20:マイクロコントローラ
21:インジケータLED
22:赤外線受光部
23:赤外線LED
【技術分野】
【0001】
本発明は、ロボットの移動経路の決定に利用する地図情報を作成するための技術、並びに、その地図情報を利用してロボットの移動経路を決定するための技術に関する。
【背景技術】
【0002】
ロボットに対しゴール(行先)を指定するだけで、ロボット自身が自動的に経路を計算しゴールへと移動する自律型のロボットが知られている。このような動作を実現するには、ロボットが移動する環境(エリア)内の地図情報を予め作成しロボットに教示しておく必要がある。そのための方法の一つとして、ロボット自身に環境内をくまなく移動(探索)させ地図を作成させるという方法が提案されている(非特許文献1参照)。しかしこの方法は、地図作成のために一定の探索時間がかかるため、新しい環境にロボットを導入する際に直ぐに使用できないという問題がある。しかも、探索により得られるのは、ロボットの移動可能範囲を示す内部的なデータにすぎない。例えば「キッチン」とか「リビング」のように場所の名称等で行先を指定できるようにするには、ロボットの内部的なデータに対して場所の名称(意味)を対応付ける処理が必要となるが(これを「ラベリング問題」とよぶ。)、この作業をユーザに行わせることは案外難しい。別の方法として、天井カメラや無線システムなどのセンサを用いてロボットの位置を監視する方法も知られている。しかしこの種のシステムは、センサ設備の設置やキャリブレーションが面倒であり、特に家庭用のロボットには導入が難しい。またこの方法でも上述したラベリング問題は解決されない。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】J. J. Leonard and H. F. Durrant-whyte, “Simultaneous map building and localization for an autonomous mobile robot,” Proc. IEEE/RSJ International Workshop on Intelligent Robots and Systems (IROS 91), vol. 3, pp. 1442-1447, 1991
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、地図情報の作成及び教示を極めて簡単かつ直観的な操作により実現することのできる技術を提供することにある。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本発明に係る地図作成システムは、ロボットが環境内を移動する際の経路決定に利用する地図情報を作成するための地図作成システムであって、互いに異なる識別子が付与された複数のランドマーク装置から構成され、前記複数のランドマーク装置はユーザによって前記環境内の任意の位置に配置されるものであり、各ランドマーク装置は、自装置の周囲に配置された隣接ランドマーク装置との間で光無線通信を行う通信手段と、光無線通信により隣接ランドマーク装置の識別子を取得すると共に、その隣接ランドマーク装置の自装置に対する方位を検出する検出手段と、自装置の識別子と隣接ランドマーク装置の識別子及び方位とを含む隣接装置情報を生成する情報生成手段と、を有しており、前記複数のランドマーク装置が隣接装置情報を光無線通信で互いに交換し合うことによって、前記複数のランドマーク装置の間の相対的な位置関係を表す地図情報を作成することを特徴とするものである。
【0006】
この構成によれば、ユーザの具体的な作業は、ロボットの行先や経路になりそうなところに、適当な間隔で(=1つ以上のランドマーク装置と光無線通信が可能なロケーションに)ランドマーク装置を設置する、という簡単かつ直観的な作業だけですむ。これだけで、ランドマーク装置同士が互いの位置関係を理解し、自動的に地図情報を作成してくれるため、システムの導入が極めて容易である。また、ランドマーク装置同士が情報交換するだけで地図情報が完成するので、地図情報の作成に要する準備時間を極めて短縮できる。
【0007】
ここで「光無線通信」とは、赤外線から可視光線までの波長の電磁波(光線)を利用した無線通信のことであり、典型的には赤外線通信を利用することができる。光無線通信を利用することにより、ランドマーク装置を小型化できる、指向性が高いため隣接ランドマーク装置の方位検出に利用できる、などの利点がある。また、光無線通信ができるということはランドマーク装置間に障害物がないことを意味するので、光無線通信の可否でランドマーク装置の隣接関係を認識し地図情報を作成することで、経路上に障害物がないことを保証する効果もある。
【0008】
上記構成において、前記通信手段は、装置本体に対して異なる方位に向けて取り付けられている複数の受光部を有しており、前記検出手段は、前記複数の受光部における受信状態に基づいて隣接ランドマーク装置の方位を検出するものであることが好ましい。このように光無線通信のデバイスを方位検出に利用することで、ランドマーク装置の小型化及びコスト低減が可能となる。
【0009】
また本発明に係るロボットシステムは、ロボットと上述した地図作成システムとを有するシステムであって、前記ロボットは、移動機構と、前記地図作成システムのランドマーク装置との間で光無線通信を行う通信手段と、いずれか1つのランドマーク装置の識別子をゴール地点としてユーザに指定させるゴール指定手段と、最寄りのランドマーク装置から光無線通信により地図情報を取得すると共に、取得した地図情報とゴール地点に指定されたランドマーク装置の識別子とに基づいて、最寄りのランドマーク装置からゴール地点に指定されたランドマーク装置に至るまでに辿るランドマーク装置の順番を経路として計算する経路計算手段と、前記経路計算手段により得られた経路に従って前記ロボットが移動するように前記移動機構を制御する制御手段と、を有することを特徴とするものである。
【0010】
この構成によれば、ユーザはゴール地点となるランドマーク装置の識別子をロボットに指示するという簡単かつ直観的な操作ですむ。しかも、ランドマーク装置自体が物理的なラベルとしての役割も果たしているために、従来必要とされていたラベリング処理(地図情報と場所の対応付け)が不要となる。どの識別子のランドマーク装置をどの場所に置いたかということだけを憶えておけば足りる。
【0011】
なお、本発明は、上記手段の少なくとも一部を有する地図作成システムやロボットシステムとして捉えることができる。また、本発明は、上記処理の少なくとも一部を含む地図作成方法、ロボットの移動経路決定方法、ロボットの制御方法などとしても捉えることもできるし、それらの方法のうちの情報処理のステップをコンピュータに実行させるためのプログラムや同プログラムを記録した記録媒体として捉えることもできる。
【0012】
例えば、本発明の一態様としての地図作成方法は、ロボットが環境内を移動する際の経路決定に利用する地図情報を作成するための地図作成方法であって、ユーザが、互いに異なる識別子が付与された複数のランドマーク装置を、前記環境内の任意の位置に配置する工程と、各ランドマーク装置が、自装置の周囲に配置された隣接ランドマーク装置との間で光無線通信を行うことにより隣接ランドマーク装置の識別子を取得すると共に、その隣接ランドマーク装置の自装置に対する方位を検出する工程と、各ランドマーク装置が、自
装置の識別子と隣接ランドマーク装置の識別子及び方位とを含む隣接装置情報を生成する工程と、前記複数のランドマーク装置が隣接装置情報を光無線通信で互いに交換し合うことによって、前記複数のランドマーク装置の間の相対的な位置関係を表す地図情報を作成する工程と、を有することを特徴とするものである。
【0013】
また、本発明の一態様としてのロボットの移動経路決定方法は、上記の地図作成方法によって、予め複数のランドマーク装置を配置すると共に、前記複数のランドマーク装置の間の相対的な位置関係を表す地図情報を作成する工程と、ユーザが、ロボットに対して、いずれか1つのランドマーク装置の識別子をゴール地点として指定する工程と、ロボットが、最寄りのランドマーク装置から光無線通信により地図情報を取得する工程と、ロボットが、取得した地図情報とゴール地点に指定されたランドマーク装置の識別子とに基づいて、最寄りのランドマーク装置からゴール地点に指定されたランドマーク装置に至るまでに辿るランドマーク装置の順番を経路として計算する工程と、を有することを特徴とするものである。
【発明の効果】
【0014】
本発明によれば、地図情報の作成及び教示を極めて簡単かつ直観的な操作により実現することができる。
【図面の簡単な説明】
【0015】
【図1】ロボットシステムの概要を模式的に示す図。
【図2】ロボットとランドマーク装置の構成を示す図。
【図3】ランドマーク装置による地図作成処理を示す図。
【図4】ロボットの経路決定及び移動に関するフローチャート。
【発明を実施するための形態】
【0016】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0017】
<システムの概要>
図1は、本発明の実施形態に係るロボットシステムの概要を模式的に示す図である。このロボットシステムは、移動機構をもつロボット1と複数のランドマーク装置2とから構成される。ロボット1と各ランドマーク装置2は光無線通信(本実施形態では赤外線通信)によって互いにデータを送受信可能である。各ランドマーク装置2には一意の識別子が付与されており、本実施形態では識別子として識別番号(数字)が割り当てられている。以下、識別番号Nのランドマーク装置2を「ランドマーク装置2−N」のように表記することとする。
【0018】
家庭用の搬送ロボット1を自宅に導入する例を用いて、図1の説明を行う。ユーザはまず、(a)に示すように、各ランドマーク装置2を床上の任意の位置に配置する。例えばロボット1の移動範囲として、キッチン、リビング、ダイニング、ベッドルーム、及び、各部屋を結ぶ廊下を想定している場合には、各部屋と廊下に適当な間隔でランドマーク装置2を配置する。このとき、隣接するランドマーク装置2の間に障害物が存在しないように配慮する。設置が完了すると、各ランドマーク装置2が自分の周りに存在するランドマーク装置2の識別番号とその方位を調査して隣接装置情報を生成し、さらにランドマーク装置2同士が隣接装置情報を交換することによって自動的に地図情報(ランドマーク装置間の相対的な位置関係を示す情報)を生成する。これで導入準備は完了である。
【0019】
ロボット1をキッチンに移動させたい場合には、(b)に示すように、キッチンに置かれたランドマーク装置2−3の識別番号「3」をロボット1に指示する。そうすると、(c)に示すように、ロボット1は最寄りのランドマーク装置2−7から地図情報を受信し
、最寄りのランドマーク装置2−7からゴール地点のランドマーク装置2−3に至るまでの経路を計算する。(c)の例では、7→5→2→3という移動経路が選ばれている。その後、ロボット1は各ランドマーク装置2と通信を行いながら、7→5→2→3の順にランドマーク装置2を辿ることで、(d)に示すようにゴール地点であるキッチンに到達することができる。
【0020】
<装置構成>
次に、図2を参照して、ロボット1及びランドマーク装置2の構成について説明する。図2の(a)は平面図、(b)は(a)を矢印の方向からみた側面図である。
【0021】
ロボット1は、車輪、駆動モータ等から構成される移動機構10と、経路計算や移動機構の制御等を行うマイクロコントローラ11とを備える自走式のロボットである。このロボット1は、その進行方向前方に赤外線受光部12、赤外線LED13、及びカメラ14を有している。赤外線受光部12及び赤外線LED13はランドマーク装置2との間で赤外線通信を行う通信手段を担うものである。またカメラ14で取り込まれる画像は、マイクロコントローラ11において、ランドマーク装置2までの距離を測定(推定)する目的や障害物を検出する目的などに利用される。さらにロボット1の本体には複数のボタン15(ゴール指定手段)が設けられている。各ボタン15はランドマーク装置2と一対一に対応付けられており、例えば「3」が付されたボタン15を押すと識別番号「3」のランドマーク装置2−3がゴール地点に設定されるようにプログラムされている。ロボット1は上記構成の他にも使用目的に応じたオプション構成(例えば物を把持するアームなど)を備えることもあるが、ここでは説明を省略する。
【0022】
ランドマーク装置2は、床(ロボット1が移動する平面)上に設置される小型のデバイスである。各ランドマーク装置2は同一の構成を有しており、本実施形態では、8個の赤外線受光部22、8個の赤外線LED23、8個のインジケータLED21、及び、これらを制御するマイクロコントローラ20を備えて構成されている。赤外線受光部22及び赤外線LED23は隣接するランドマーク装置2との間又はロボット1との間で赤外線通信を行う通信手段を担うものである。図2(a)に示すように8組の赤外線受光部22及び赤外線LED23がランドマーク装置2の外周に等配されており、全方位の相手と通信可能な構成となっている。ここでは38kHzの変調信号による赤外線通信モジュールを用いる。
【0023】
各ランドマーク装置2は、一定の時間間隔で赤外線LED23からデータ送信を行っている。初期状態では自装置の識別番号のみを送信するが、後述する隣接装置情報や地図情報が得られた後はそれらのデータを送信する。一方、各ランドマーク装置2は、赤外線受光部22において周囲に存在する隣接ランドマーク装置2からデータを受信し、隣接ランドマーク装置2の識別番号や隣接装置情報等を取得する。
【0024】
また本実施形態では、赤外線通信の受信状態を隣接ランドマーク装置2の方位検出に利用する。方位検出の原理について図2(a)を参照して説明する。ランドマーク装置2−5から送信された赤外線信号は、ランドマーク装置2−7の赤外線受光部22にて受信される。このとき8個すべての赤外線受光部22で信号が受信されるわけではなく、ランドマーク装置2−5の方を向いている赤外線受光部22でのみ信号が検知される。これは赤外線の直進性及び指向性が非常に高いためである。従って、各赤外線受光部22における信号強度を比較したり、受信に成功した頻度を比較することで、赤外線信号の到来方向、つまり自装置に対する隣接ランドマーク装置の方位を推定することができる。図2(a)の例では、図の左上の赤外線受光部22での受信状態が最良となり、ランドマーク装置2−7からみて図の左上の方位にランドマーク装置2−5が存在することを検出できる。なお赤外線受光部22における信号強度の分解能を高めたり、赤外線受光部22の数を増や
すことで、方位分解能を上げることが可能である。
【0025】
インジケータLED21は、検出された隣接ランドマーク装置2の方位を表示するためのインジケータである。図2(a)の例では、ランドマーク装置2−7の8個のインジケータLED21のうち左上の1つが点灯状態となっている。このインジケータLED21は主にユーザ確認のために利用される。例えば、ランドマーク装置2−5,2−7を設置したときに両者のインジケータLED21が点灯しなかった場合には、ランドマーク装置2−5,2−7の間の通信状態が不良であるという意味なので、装置の向きや間隔を調整する必要があることが分かる。
【0026】
<地図作成処理>
次に、図3を参照して、ランドマーク装置による地図作成処理について説明する。図3において、○で示した図形がランドマーク装置を表し、図形中の数字がランドマーク装置の識別番号を表している。また点線は隣接関係を示しており、点線で結ばれたランドマーク装置同士は隣接している(=通信可能であること)を表している。
【0027】
(a)に示すように、ランドマーク装置2−2及び2−8を配置したとする。各ランドマーク装置2−2,2−8は周囲に向けて自分の識別番号を送信する。これにより、ランドマーク装置2−2は45°の方位に隣接ランドマーク装置2−8が存在することを認識し、ランドマーク装置2−8は30°の方位に隣接ランドマーク装置2−2が存在することを認識する。隣接ランドマーク装置を検出すると、各ランドマーク装置は隣接装置情報を作成する。隣接装置情報とは、自装置の識別番号、バージョン、隣接ランドマーク装置の識別番号及び方位から構成される情報である。(a)の段階では、ランドマーク装置2−2において「ID2,ver1,8−45」という内容の隣接装置情報が生成され、ランドマーク装置2−8において「ID8,ver1,2−30」という内容の隣接装置情報が生成される。なお方位は自装置の基準方向に対する相対角度で表される。
【0028】
その後、(b)に示すように、各ランドマーク装置2−2,2−8は隣接装置情報を交換し、自装置の隣接装置情報に他の装置の隣接装置情報を追加してメモリに保存する。このようにして得られる隣接装置情報のリスト(テーブル)は、ネットワークを構成する全てのランドマーク装置の相対的な位置関係を表すデータであり、本システムにおいて地図情報として利用される。
【0029】
続いて、(c)〜(e)を用いてランドマーク装置の構成に変化が起きた時の地図情報の更新処理を説明する。(c)に示すように、ランドマーク装置2−3が追加で設置されると、ランドマーク装置2−3では「ID3,ver1,2−220」という内容の隣接装置情報が生成される。一方、ランドマーク装置2−2では、既存の隣接装置情報にランドマーク装置2−3の情報「3−305」が追加されると共に、バージョン番号がインクリメントされ「ver2」となる。その後、(d)及び(e)に順に示すように、ランドマーク装置2−2,2−3,2−8の間で隣接装置情報の交換が繰り返され、各装置内の地図情報が最新のものに書き変わる。
【0030】
なお、隣接装置情報にバージョン番号を含めた理由は、隣接装置情報のコンフリクトを解決するためである。例えば(c)の配置において、ランドマーク装置2−3と2−8が通信可能であった場合には、ランドマーク装置2−3は、装置2−2から「ID2,ver2,8−45,3−305」を受信する一方で、装置2−8から「ID2,ver1,8−45」を受信する可能性がある。このように同じ識別番号に関する隣接装置情報を受信したときには、バージョンの新しいものを採用することで、地図情報の更新処理を正しく行うことができる。
【0031】
<ロボットの動作>
次に、図4のフローチャートを参照して、ロボット1の経路決定及び移動に関する処理について説明する。なおランドマーク装置2による地図作成処理は予め完了し、ネットワークを構成する全てのランドマーク装置2が地図情報を共有している状態にあるものとする。なお図4では「ランドマーク装置」を「LM」と略記している。
【0032】
(S100)ユーザがロボット1のボタン15を押して、ゴール地点とすべきランドマーク装置2の識別番号をロボット1に指示する。
【0033】
(S101)ロボット1は、周囲のランドマーク装置2と赤外線通信を行い、地図情報を取得する。このとき、赤外線受光部12における信号強度や受信頻度などに基づき、ロボット1は最寄りの(最近接の)ランドマーク装置2を認識する。
【0034】
(S102)次に、ロボット1は、地図情報に含まれるランドマーク装置同士の隣接関係に基づいて、最寄りのランドマーク装置から、ゴール地点のランドマーク装置までの経路を計算する。ここでは、経由するランドマーク装置の数が最小となるように経路を決定する。もし経由数が同じ経路が複数存在した場合には、ロボット1の方向転換が最も小さくなる経路を選択すればよい。
【0035】
(S103)移動経路が決定したら、ロボット1はまず最寄りのランドマーク装置を目標ランドマーク装置に設定する。
【0036】
(S104)そして、ロボット1は目標ランドマーク装置に向かって移動を行う。このとき、ロボット1は、赤外線受光部12で目標ランドマーク装置からの赤外線信号を検知することで、移動方向の決定及び修正を行う。
【0037】
(S105)ロボット1は一定時間ごとにカメラ14から画像を取り込み、所定の画像処理を施すことで、ロボット1と目標ランドマーク装置との距離を計算する。その距離が所定値以下となるまで、ロボット1は移動を続ける。
【0038】
(S106)目標ランドマーク装置までの距離が所定値以下となったら、ロボット1はS102で決定した経路情報を参照して、次のランドマーク装置があるかどうかを判断する。
【0039】
(S107)次のランドマーク装置が存在する場合、ロボット1はそのランドマーク装置を次の目標ランドマーク装置に設定する。そして、ロボット1は、地図情報を参照して、現在地に対する次の目標ランドマーク装置の方位を計算し、その方位に向かうよう方向転換を行い、移動を継続する。なおロボット1が次の目標ランドマーク装置からの赤外線信号を受信すれば、移動方向は適宜修正されるため、S107での方位計算はさほど厳密でなくてよい。
【0040】
S104〜S107の処理を繰り返し、ゴール地点のランドマーク装置に到着すると、S106でNO判定となり、ロボット1は移動を停止する。
【0041】
<本システムの優れた利点>
以上述べた本実施形態のシステムによれば、地図作成のために必要な作業は、ロボットの行先や経路になりそうなところに、適当な間隔でランドマーク装置を設置する、という簡単かつ直観的な作業だけですむ。これだけで、ランドマーク装置同士が互いの位置関係を理解し、自動的に地図情報を作成してくれるため、システムの導入が極めて容易である。また、ランドマーク装置同士が情報交換するだけで地図情報が完成するので、地図情報
の作成に要する準備時間を極めて短縮できる。しかも、ランドマーク装置自体が物理的なラベルとしての役割も果たしているために、従来必要とされていたラベリング処理(地図情報と場所の対応付け)が不要となる。ユーザは、どの識別番号のランドマーク装置をどの場所に置いたかということだけを憶えておけばよい。
【0042】
また本実施形態では、ランドマーク装置間の通信に赤外線通信を利用したことで、ランドマーク装置の小型化及びコスト低減を図ることができると共に、隣接ランドマーク装置の方位検出に利用できるという利点がある。また、赤外線通信ができるということはランドマーク装置間に障害物がないことを意味するので、赤外線通信の可否でランドマーク装置の隣接関係を認識し地図情報を作成することで、経路上に障害物がないことを保証する効果もある。
【0043】
<変形例>
なお、上記実施形態は本発明の一具体例を例示したものにすぎない。本発明の範囲は上記実施形態に限られるものではなく、その技術思想の範囲内で種々の変形が可能である。例えば上記実施形態では赤外線通信を利用したが、可視光を用いた無線通信を用いることもできる。またロボットの赤外線受光部を前方だけでなく、複数の方向に設けることも好ましい。またロボットの移動機構は車輪に限らず、脚や浮上装置のような移動機構を設けることもできる。またカメラによる画像センサではなく、他の方式のセンサを距離測定や障害物検知に用いることもできる。
【符号の説明】
【0044】
1:ロボット
2:ランドマーク装置
10:移動機構
11:マイクロコントローラ
12:赤外線受光部
13:赤外線LED
14:カメラ
15:ボタン
20:マイクロコントローラ
21:インジケータLED
22:赤外線受光部
23:赤外線LED
【特許請求の範囲】
【請求項1】
ロボットが環境内を移動する際の経路決定に利用する地図情報を作成するための地図作成システムであって、
互いに異なる識別子が付与された複数のランドマーク装置から構成され、前記複数のランドマーク装置はユーザによって前記環境内の任意の位置に配置されるものであり、
各ランドマーク装置は、
自装置の周囲に配置された隣接ランドマーク装置との間で光無線通信を行う通信手段と、
光無線通信により隣接ランドマーク装置の識別子を取得すると共に、その隣接ランドマーク装置の自装置に対する方位を検出する検出手段と、
自装置の識別子と隣接ランドマーク装置の識別子及び方位とを含む隣接装置情報を生成する情報生成手段と、を有しており、
前記複数のランドマーク装置が隣接装置情報を光無線通信で互いに交換し合うことによって、前記複数のランドマーク装置の間の相対的な位置関係を表す地図情報を作成する
ことを特徴とする地図作成システム。
【請求項2】
前記通信手段は、装置本体に対して異なる方位に向けて取り付けられている複数の受光部を有しており、
前記検出手段は、前記複数の受光部における受信状態に基づいて隣接ランドマーク装置の方位を検出するものである
ことを特徴とする請求項1に記載の地図作成システム。
【請求項3】
ロボットと、請求項1又は2に記載の地図作成システムと、を有するロボットシステムであって、
前記ロボットは、
移動機構と、
前記地図作成システムのランドマーク装置との間で光無線通信を行う通信手段と、
いずれか1つのランドマーク装置の識別子をゴール地点としてユーザに指定させるゴール指定手段と、
最寄りのランドマーク装置から光無線通信により地図情報を取得すると共に、取得した地図情報とゴール地点に指定されたランドマーク装置の識別子とに基づいて、最寄りのランドマーク装置からゴール地点に指定されたランドマーク装置に至るまでに辿るランドマーク装置の順番を経路として計算する経路計算手段と、
前記経路計算手段により得られた経路に従って前記ロボットが移動するように前記移動機構を制御する制御手段と、
を有することを特徴とするロボットシステム。
【請求項4】
ロボットが環境内を移動する際の経路決定に利用する地図情報を作成するための地図作成方法であって、
ユーザが、互いに異なる識別子が付与された複数のランドマーク装置を、前記環境内の任意の位置に配置する工程と、
各ランドマーク装置が、自装置の周囲に配置された隣接ランドマーク装置との間で光無線通信を行うことにより隣接ランドマーク装置の識別子を取得すると共に、その隣接ランドマーク装置の自装置に対する方位を検出する工程と、
各ランドマーク装置が、自装置の識別子と隣接ランドマーク装置の識別子及び方位とを含む隣接装置情報を生成する工程と、
前記複数のランドマーク装置が隣接装置情報を光無線通信で互いに交換し合うことによって、前記複数のランドマーク装置の間の相対的な位置関係を表す地図情報を作成する工程と、
を有することを特徴とする地図作成方法。
【請求項5】
ロボットの移動経路決定方法であって、
請求項4に記載の地図作成方法によって、予め複数のランドマーク装置を配置すると共に、前記複数のランドマーク装置の間の相対的な位置関係を表す地図情報を作成する工程と、
ユーザが、ロボットに対して、いずれか1つのランドマーク装置の識別子をゴール地点として指定する工程と、
ロボットが、最寄りのランドマーク装置から光無線通信により地図情報を取得する工程と、
ロボットが、取得した地図情報とゴール地点に指定されたランドマーク装置の識別子とに基づいて、最寄りのランドマーク装置からゴール地点に指定されたランドマーク装置に至るまでに辿るランドマーク装置の順番を経路として計算する工程と、
を有することを特徴とするロボットの移動経路決定方法。
【請求項1】
ロボットが環境内を移動する際の経路決定に利用する地図情報を作成するための地図作成システムであって、
互いに異なる識別子が付与された複数のランドマーク装置から構成され、前記複数のランドマーク装置はユーザによって前記環境内の任意の位置に配置されるものであり、
各ランドマーク装置は、
自装置の周囲に配置された隣接ランドマーク装置との間で光無線通信を行う通信手段と、
光無線通信により隣接ランドマーク装置の識別子を取得すると共に、その隣接ランドマーク装置の自装置に対する方位を検出する検出手段と、
自装置の識別子と隣接ランドマーク装置の識別子及び方位とを含む隣接装置情報を生成する情報生成手段と、を有しており、
前記複数のランドマーク装置が隣接装置情報を光無線通信で互いに交換し合うことによって、前記複数のランドマーク装置の間の相対的な位置関係を表す地図情報を作成する
ことを特徴とする地図作成システム。
【請求項2】
前記通信手段は、装置本体に対して異なる方位に向けて取り付けられている複数の受光部を有しており、
前記検出手段は、前記複数の受光部における受信状態に基づいて隣接ランドマーク装置の方位を検出するものである
ことを特徴とする請求項1に記載の地図作成システム。
【請求項3】
ロボットと、請求項1又は2に記載の地図作成システムと、を有するロボットシステムであって、
前記ロボットは、
移動機構と、
前記地図作成システムのランドマーク装置との間で光無線通信を行う通信手段と、
いずれか1つのランドマーク装置の識別子をゴール地点としてユーザに指定させるゴール指定手段と、
最寄りのランドマーク装置から光無線通信により地図情報を取得すると共に、取得した地図情報とゴール地点に指定されたランドマーク装置の識別子とに基づいて、最寄りのランドマーク装置からゴール地点に指定されたランドマーク装置に至るまでに辿るランドマーク装置の順番を経路として計算する経路計算手段と、
前記経路計算手段により得られた経路に従って前記ロボットが移動するように前記移動機構を制御する制御手段と、
を有することを特徴とするロボットシステム。
【請求項4】
ロボットが環境内を移動する際の経路決定に利用する地図情報を作成するための地図作成方法であって、
ユーザが、互いに異なる識別子が付与された複数のランドマーク装置を、前記環境内の任意の位置に配置する工程と、
各ランドマーク装置が、自装置の周囲に配置された隣接ランドマーク装置との間で光無線通信を行うことにより隣接ランドマーク装置の識別子を取得すると共に、その隣接ランドマーク装置の自装置に対する方位を検出する工程と、
各ランドマーク装置が、自装置の識別子と隣接ランドマーク装置の識別子及び方位とを含む隣接装置情報を生成する工程と、
前記複数のランドマーク装置が隣接装置情報を光無線通信で互いに交換し合うことによって、前記複数のランドマーク装置の間の相対的な位置関係を表す地図情報を作成する工程と、
を有することを特徴とする地図作成方法。
【請求項5】
ロボットの移動経路決定方法であって、
請求項4に記載の地図作成方法によって、予め複数のランドマーク装置を配置すると共に、前記複数のランドマーク装置の間の相対的な位置関係を表す地図情報を作成する工程と、
ユーザが、ロボットに対して、いずれか1つのランドマーク装置の識別子をゴール地点として指定する工程と、
ロボットが、最寄りのランドマーク装置から光無線通信により地図情報を取得する工程と、
ロボットが、取得した地図情報とゴール地点に指定されたランドマーク装置の識別子とに基づいて、最寄りのランドマーク装置からゴール地点に指定されたランドマーク装置に至るまでに辿るランドマーク装置の順番を経路として計算する工程と、
を有することを特徴とするロボットの移動経路決定方法。
【図1】


【図2】
【図3】

【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−180737(P2011−180737A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−42773(P2010−42773)
【出願日】平成22年2月26日(2010.2.26)
【出願人】(503360115)独立行政法人科学技術振興機構 (1,734)
【Fターム(参考)】
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年2月26日(2010.2.26)
【出願人】(503360115)独立行政法人科学技術振興機構 (1,734)
【Fターム(参考)】
[ Back to top ]