
地図作成装置、方法及び車載用ナビゲーション装置
【課題】 走行により得られる位置情報に基づいて正確な地図情報を生成する。
【解決手段】 地図生成装置は、走行経路上のサンプリング点における位置情報を検出する位置検出部と、当該サンプリング点における曲率を算出する曲率算出部と、走行経路が、直線区間、円弧区間及びクロソイド曲線区間のいずれかで近似されるように、走行経路における曲率を補正する曲率補正部と、補正後の曲率に基づき走行経路に対応する道路上のノードの位置を示すノード情報を生成するノード情報生成部と、ノード情報を記憶する記憶部とを備える。曲率補正部は、走行経路における曲率変化量のピーク値Δχpeakを抽出するとともに、このピーク値をとる点を含む一定領域に対し、曲率変化量をΔχpeakとするクロソイド曲線区間として設定する。
【解決手段】 地図生成装置は、走行経路上のサンプリング点における位置情報を検出する位置検出部と、当該サンプリング点における曲率を算出する曲率算出部と、走行経路が、直線区間、円弧区間及びクロソイド曲線区間のいずれかで近似されるように、走行経路における曲率を補正する曲率補正部と、補正後の曲率に基づき走行経路に対応する道路上のノードの位置を示すノード情報を生成するノード情報生成部と、ノード情報を記憶する記憶部とを備える。曲率補正部は、走行経路における曲率変化量のピーク値Δχpeakを抽出するとともに、このピーク値をとる点を含む一定領域に対し、曲率変化量をΔχpeakとするクロソイド曲線区間として設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地図データを自動的に作成する装置、方法及び車載用ナビゲーション装置に関するものである。
【背景技術】
【0002】
GPS受信機を用いて走行中の車両の位置を検出するとともに、検出された位置情報を予めデータベース化された地図データと照合することで、地図上の車両の位置を特定するナビゲーション装置が広く知られている。
【0003】
このようなナビゲーション装置で用いられる地図データは、例えば市販の道路地図を用いて、道路上の点を一定間隔でサンプリングしてノード点を抽出し、これらノード点の二次元座標の情報を記憶媒体に記憶することで生成される。このような地図データは、もともと精度の高い道路地図に基づき生成されるため、一般的に精度が高い。
【0004】
また、特許文献1記載の電子化道路地図では、記憶媒体に予め記憶されたノード点の情報のうち、互いに隣接する3つのノード点を通過する円の近似式を算出することで、当該ノードにおける曲率を得る。そして、算出された曲率の値に応じて、当該ノードを含む区間を、直線、円弧またはクロソイド曲線(直線から円弧に至る曲線)のいずれかによって近似して表示することで、限られたデータ量のもとで高い精度の道路地図を表示することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平9−185322号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
前述したように、従来のカーナビゲーション装置では、道路上の点を示すノード位置の正確な情報を含む地図データが記憶された地図データベース(例えば、DVD−ROMやHDD)が予め備えられている。しかし、この地図データベースを導入するコストが高いため、カーナビゲーション装置を低価格で提供することが困難であった。
【0007】
そこで、高価な地図データベースを省略し、車両が実際に走行した経路に基づいて地図データを作成していく構成とすることが、コストダウンの観点から好ましく、このような地図作成型のナビゲーション装置では、GPS受信機等の位置検出手段を用いて走行中の車両の位置(緯度・経度情報)を検出するとともに、車速センサや方向センサ等の各種センサを用いて、車両の走行距離や走行方向といった情報を検出し、走行した道路の距離、方向、交差点の位置等の情報を算出していくことで、地図データを作成することができる。
【0008】
しかし、位置センサの測定誤差により、従来の地図データベースと比べると、生成される地図データの精度が低くなってしまうため、ナビゲーション装置として用いることが難しい。そこで、上記特許文献1に記載の方法を適用し、走行した道路を直線、円弧またはクロソイド曲線のいずれかで近似して、より正確な地図データを生成することが好ましい。
【0009】
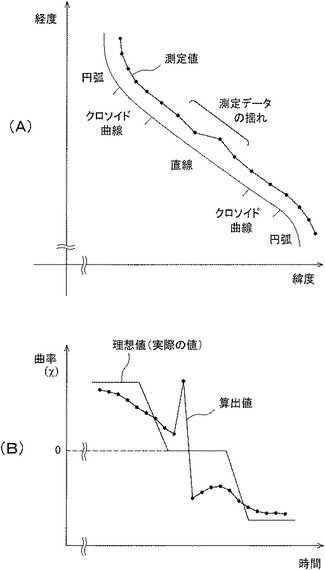
しかし、例えば図12(A)に示すように、円弧区間、クロソイド曲線区間、直線区間、クロソイド曲線区間、円弧区間から構成される道路において、上記特許文献1に記載の方法を適用すると、前述の位置センサ等の測定誤差により、曲率の算出値が図12(B)に示すようななだらかなものとなり、円弧区間、クロソイド曲線区間、直線区間の境界が不明確となり、正確な道路地図を再現することが困難となっていた。
【0010】
さらに、測定誤差が非常に大きい場合、あるいはハンドル操作を誤った場合に、測定データに揺れが生じることがあり(図12(A))、かかる場合に、従前のように、隣接する3つのノード点を通過する円の曲率を、最小二乗法を用いて算出すると、算出値に大きな飛びが生じる場合がある(図12(B))。かかる場合には、実際には直線区間であるにもかかわらず、円弧区間若しくはクロソイド曲線区間であると判定されてしまうため、正確な道路地図を再現する上で大きな障害となっていた。
【0011】
本発明は、上記に鑑みなされたものであり、正確な地図情報を生成することが可能な地図生成装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明に係る地図生成装置は、走行経路上のサンプリング点における位置情報を検出する位置検出部と、前記位置情報に基づき、前記サンプリング点における曲率を算出する曲率算出部と、前記走行経路が、直線区間、円弧区間及び緩和曲線区間のいずれかで近似されるように、前記走行経路における曲率を補正する曲率補正部と、補正後の曲率に基づいて、前記走行経路に対応する道路上のノードの位置を示すノード情報を生成するノード情報生成部と、前記ノード情報を記憶する記憶部とを備えた構成を有する。
【0013】
かかる構成により、走行経路における曲率が適正に補正され、補正後の曲率に基づいて走行経路に対応する地図情報が生成されるから、位置情報を検出する各種センサに測定誤差が生じた場合であっても、正確な地図情報を生成することが可能となる。
【0014】
本発明に係る地図生成装置において、前記曲率補正部は、前記走行経路における曲率変化量のピーク値Δχpeakを抽出するとともに、前記曲率変化量がピーク値をとる点を含む一定領域に対し、曲率変化量をΔχpeakとする緩和曲線区間として設定することが好ましい。また、前記走行経路における曲率のピーク値χpeakを抽出するとともに、前記曲率がピーク値をとる点を含む一定領域に対し、曲率をχpeakとする円弧区間として設定することが好ましい。
【0015】
本発明に係る地図生成装置において、前記曲率算出部は、隣接する前記サンプリング点における走行角度の変動量、及び、隣接する前記サンプリング点の距離に基づき、曲率の値を算出する。この構成により、簡単な演算処理により、サンプリング点における曲率の値を算出することができる。
【0016】
本発明に係る地図生成装置において、前記曲率補正部は、前記走行経路における曲率変化量が0となる点を含む一定領域に対し、前記直線区間または前記円弧区間として設定する。かかる構成により、例えば直線区間が短い経路を走行する場合でも、当該直線区間を適切に検出することができ、より正確な地図情報を生成することができる。
【0017】
本発明の地図生成装置は、前記曲率算出部で算出された曲率のデータを受信するとともに、前記走行経路に対応する曲率のデータが前記記憶部に記憶されている場合に、前記曲率算出部で算出された曲率の値と、前記記憶部に記憶された曲率の値に基づき、前記走行経路における曲率の値を更新する曲率更新部を更に備え、前記曲率補正部は、前記曲率更新部において更新された曲率の値に基づき、前記走行経路における曲率を補正する。かかる構成により、過去に走行したことのある走行経路に対する地図情報が更新されていくので、より正確な地図情報を生成することができる。
【0018】
本発明の地図生成方法は、走行経路上のサンプリング点における位置情報を検出する位置検出ステップと、前記位置情報に基づき、前記サンプリング点における曲率を算出する曲率算出ステップと、前記走行経路が、直線区間、円弧区間及び緩和曲線区間のいずれかで近似されるように、前記走行経路における曲率を補正する曲率補正ステップと、補正後の曲率に基づいて、前記走行経路に対応する道路上のノードの位置を示すノード情報を生成するノード情報生成ステップと、前記ノード情報を記憶する記憶ステップとを備えた構成を有する。かかる構成によっても、走行経路における曲率が適正に補正され、補正後の曲率に基づいて走行経路に対応する地図情報が生成されるから、位置情報を検出する各種センサに測定誤差が生じた場合であっても、正確な地図情報を生成することが可能となる。
【図面の簡単な説明】
【0019】
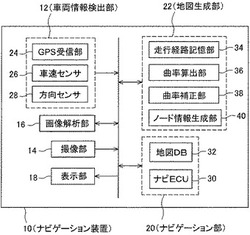
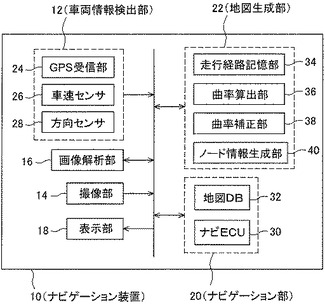
【図1】本発明の地図生成装置を適用した第1の実施形態に係るナビゲーション装置の構成を示すブロック図
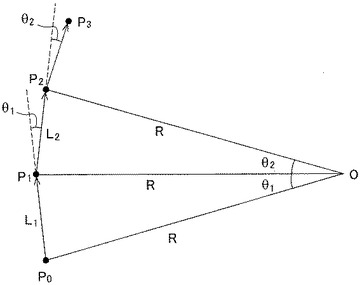
【図2】走行経路上のサンプリング点における曲率を算出する方法を示す説明図
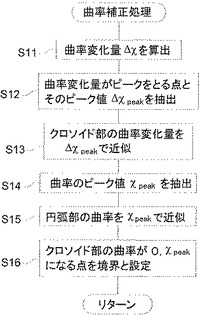
【図3】曲率補正処理を示すフローチャート
【図4】曲率補正を行う手順を示す説明図
【図5】ノードデータの生成処理を示すフローチャート
【図6】直線区間が短い場合の曲率補正の一例を示す説明図
【図7】第2の実施形態に係るナビゲーション装置における曲率補正処理の手順を示す説明図
【図8】第2の実施形態における曲率補正処理を示すフローチャート
【図9】第3の実施形態に係るナビゲーション装置の構成を示すブロック図
【図10】第3の実施形態における曲率補正処理を示すフローチャート
【図11】第3の実施形態に係るナビゲーション装置における曲率補正処理の手順を示す説明図
【図12】従来例に係る地図生成装置における曲率の算出値の一例を示す説明図
【発明を実施するための形態】
【0020】
本発明の好適な実施形態について、図面を参照しつつ説明する。
【0021】
(第1実施形態)
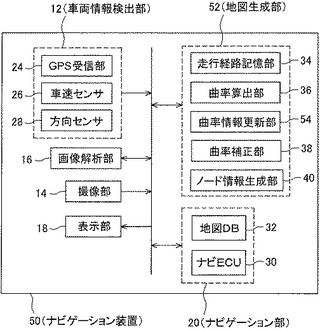
図1は、本発明の第1実施形態に係る地図生成装置を含む、車載用のナビゲーション装置の構成を示すブロック図である。ナビゲーション装置10は、車両情報検出部12、撮像部14、画像解析部16、表示部18、ナビゲーション部20と、地図生成部22とを備える。
【0022】
車両情報検出部12は、例えばGPS受信部24、車速センサ26、方向センサ28を備えており、GPS受信部24は、GPS衛星からの電波信号を受信して、車両の位置情報(経度及び緯度情報)を取得する。車速センサ26は、車両の走行速度を測定して、走行速度情報を取得する。また、方向センサ28は、地磁気センサあるいはジャイロセンサであり、車両が走行する絶対方位を示す走行方向情報を取得する。
【0023】
車両情報検出部12には、上記センサの他に、車両の加速度を検出する加速度センサ、アクセル開度を検出するアクセル開度センサ、ブレーキペダルの操作量を検出するブレーキセンサ、ステアリングの蛇角を検出するステアリングセンサ等を含めることができる。
【0024】
撮像部14は、例えば車両のフロントガラス付近に取り付けられたCCDカメラあるいはCMOSカメラであり、例えば市販のドライブレコーダーに備えられたカメラを用いることができる。撮像部14は、車両前方の状況を撮像して撮像画像を生成するとともに、ホワイトバランス処理、ガンマ補正等の信号処理を施した撮像画像データを出力する。
【0025】
画像解析部16は、撮像部14において得られた画像に対し、周知の画像解析を施すとともに、予め記憶された施設(道路標識、信号、ガソリンスタンド、コンビニ、ホテル等)の特徴量を示すデータと対比することで、現在走行中の道路付近における施設の有無、施設のタイプを検出する。
【0026】
表示部18は、例えば液晶ディスプレイであり、後述する地図DB32に記憶されている地図データによって生成される地図画像と、自車位置を示すインジケータ等とを重ねて表示することで、運転手に地図情報を提供する。また、図示しない入力部を介して目的地情報が入力される場合は、表示部18は、目的地までの経路情報を併せて表示する。
【0027】
ナビゲーション部20は、ナビゲーション機能を実現するための経路情報を生成するナビECU30と、地図情報を記憶する地図データベース(地図DB)32とを備えている。ナビECU30は、利用者によって選択された目的地までの経路情報を地図画像に重ねて表示部18に表示させるとともに、車両情報検出部12において検出された車両の位置、速度、走行方向等の情報に基づき、車両の現在位置を表示部18上の地図画像に重ねて表示する。
【0028】
地図DB32には、ノードデータ、施設データ等の道路地図を構成するのに必要な情報が記憶されている。ノードデータは、地図画像を構成する道路の位置及び形状に関するものであり、例えば道路の分岐点(交差点)を含む道路上の点(ノード点)の座標(経度・緯度)、当該ノード点が含まれる道路種別(例えば、高速道路、幹線道路、市道といった情報)、当該ノード点における道路のタイプ(直線区間、円弧区間、クロソイド曲線区間)及び曲率のデータが含まれる。また、施設データは、各ノード点の付近に存在する施設情報に関するデータを含み、ノードデータと関連づけて記憶されている。
【0029】
地図生成部22は、車両が走行した経路に基づいて道路地図を生成するものであり、走行経路記憶部34、曲率算出部36,曲率補正部38、ノード情報生成部40を備える。地図生成部22において生成された道路地図のデータ(ノードデータ)は、ナビゲーション部20の地図DB32に順次記憶される。
【0030】
走行経路記憶部34は、車両情報検出部12において一定時間間隔で検出された車両の位置情報(経度・緯度情報)を、順次記憶する。ここで、車両情報検出部12において位置情報が検出された点を「サンプリング点」と称する。なお、サンプリング点の位置情報として、GPS受信部26において受信された位置情報をそのまま用いても良いが、車速センサ28で検出された車速情報及び方向センサ30で検出された走行方向情報を組み合わせて、サンプリング点の位置情報を補正しても良い。
【0031】
曲率算出部36は、走行経路記憶部34で得られたサンプリング点の位置情報に基づき、各サンプリング点における曲率χの値を、以下の方法により算出する。図2において、点P0〜P3は、車両情報検出部12によって検出されたサンプリング点であり、同図においては、点P0〜P2が、基準点Oを中心とする半径Rの円周上に位置しているものとする。また、点P0、基準点O、点P1がなす角をθ1とし、点P1、基準点O、点P2がなす角をθ2とする。
【0032】
この場合、点P0、基準点O、点P1によって形成される三角形は二等辺三角形となるから、点P0と点P1の間の距離L1は、次式で表すことができる。
L1=2・Rsin(θ1/2) ・・・(1)
ここで、サンプリングの時間間隔が短く、θ1が微小角であると近似することができるから、上式(1)は、次のようになる。
R=(1/χ)=L1/θ1 ・・・(2)
【0033】
ここで、L1の値は、走行経路記憶部34で得られた車両の位置情報に基づき、容易に算出することができる。また、図2において、点P0から点P1に至る線分を延長した線と、点P1からP2に至る線分とがなす角がθ1となるから、角度θ1は、点P1における走行方向の角度変化を示すこととなる。
【0034】
このように、サンプリング点の間隔L1と、車両の走行角度の変化量θ1に基づき、上記の(2)式により、曲率χ(=1/R)の値を算出することができる。このため、円の最小二乗法に基づき曲率を算出する必要がなくなり、曲率χの算出に要する処理量を低減することができる。また、曲率χの算出値の飛び(図12(B)参照)が生じるおそれをなくすことができる。
【0035】
また、点P1、基準点O、点P2によって形成される三角形も二等辺三角形となるため、上記と同様に、点P1と点P2の距離L2と、点P2における走行角度の変化量(=θ2)に基づき、曲率χ(=1/R)を算出することができる。なお、位置センサ等の測定誤差を考慮し、上記方法で算出された複数の曲率の平均値を算出して、最終的な曲率χの値を生成するようにしても良い。
【0036】
曲率補正部38は、曲率算出部36において算出された曲率χの値を補正し、車両が走行した道路を、直線区間、円弧区間、クロソイド曲線区間のいずれかに分類できるようにする。ここで、クロソイド曲線区間とは、曲率が一定の割合で増加する区間である。直線で近似される直線区間と、曲率が一定の円弧区間とを直接に接続してしまうと、車両の運転手は、直線区間と円弧区間の接続部において、円弧の曲率に対応する操舵角まで一気にハンドルを操作する必要が生じる。そこで、直線で近似される直線区間と、円弧で近似される円弧区間との間に、曲率が一定の割合で増加するクロソイド曲線区間が設けられており、これにより、運転手は徐々にステアリングを操作することで、直線区間からカーブに至る経路を通過することができる。
【0037】
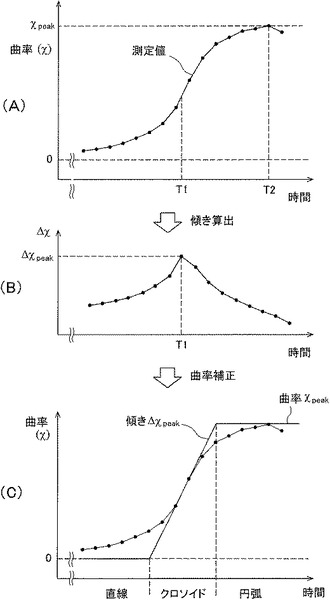
曲率補正部38における曲率補正処理について、図3のフローチャート及び図4の説明図を用いて説明する。上記方法により算出された曲率χの算出値は、各種センサの測定誤差等の要因により、図4(A)に示すようになだらかに変化している場合が多く、直線区間、円弧区間、クロソイド曲線区間の境界が不明確となっていた。
【0038】
曲率補正部38では、まず、隣接する2つのサンプリング点間の曲率χの変化量Δχを算出し(S11)、図4(B)に示すような曲率変化量Δχの分布を得る。次に、曲率変化量Δχのピーク値Δχpeakと、このピーク値をとる点(図4(B)では時間T1)を抽出し(S12)、この値Δχpeakを、クロソイド曲線区間における曲率χの変化量(一定値)と近似する(図4(C)の傾きΔχpeakの直線)(S13)。
【0039】
次に、曲率χがピーク値χpeakをとる点(T2)を検出し(S14)、当該T2を含む領域を、曲率χが一定(χpeak)の円弧区間と近似する(S15)。
【0040】
そして、カーブ区間における曲率χの直線と、クロソイド曲線区間の曲率χの直線の交点を、クロソイド曲線区間とカーブ区間の境界と設定する。また、クロソイド曲線区間に対応する曲率χの直線と、曲率χが0となる点との交点を、直線区間とクロソイド曲線区間との境界と設定する(S16)。これにより、車両が走行した経路を、直線区間、クロソイド曲線区間及び円弧区間に分類することができる。
【0041】
ノード情報生成部40は、曲率補正部38によって補正された各サンプリング点の曲率に基づき、車両が走行した道路形状を再現するとともに、再現された道路上で任意に選択された点及び交差点(ノード点)の座標を算出し、ノードデータとして地図DB32に出力する。地図DB32に記憶されたノードデータは、ナビゲーション動作が行われる際に読み出される。
【0042】
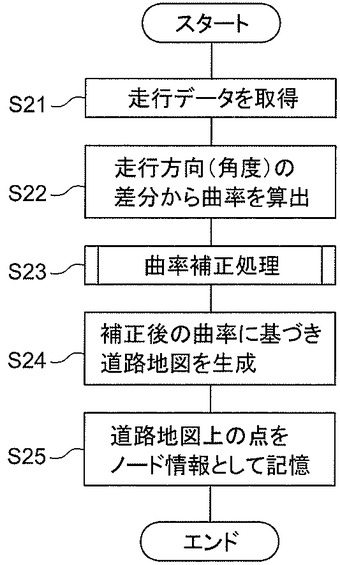
以下、上記構成による地図生成装置の動作について、図5のフローチャートを参照して説明する。地図生成装置10の起動後に車両を走行させると、車両位置検出部12において、現在走行中の車両の位置情報を含む走行データを取得する(S21)。また、撮像部16において車両の前方の状況を撮影し、画像解析部28において、当該撮影画像に含まれる施設の有無及び施設タイプの情報を取得する。
【0043】
車両位置検出部12において検出されたサンプリング点の位置情報を示すデータは、地図生成部22の走行経路記憶部34に記憶される。曲率算出部36において、走行経路記憶部34に記憶されたサンプリング点の位置情報に基づき、走行方向の角度変化及びサンプリング点間の距離を算出するとともに、これら角度変化及び距離の情報に基づき、各サンプリング点における曲率χの値を算出する(S22)。これにより、走行経路上の道路における曲率χを算出するにあたり、円の最小二乗法を用いる必要がなく、処理に必要な演算量を低減することができる。
【0044】
曲率算出部36で得られた曲率χの情報は、曲率補正部38に送られ、ここで前述した曲率補正処理を行うことで、サンプリング点における曲率の値を補正するとともに、走行経路を直線区間、クロソイド曲線区間及び円弧区間のいずれかに分類される(S23)。ノード情報生成部40は、曲率補正処理が施された曲率の補正値に基づき、直線区間、クロソイド曲線区間及び円弧区間に区分けされた道路地図を生成する(S24)。そして、ノード情報生成部40は、生成された道路地図上の点をノード点として抽出し、当該ノード点における座標や道路種別の情報をノードデータとして地図DB32に出力する(S25)。
【0045】
(第2の実施形態)
以下、本発明の第2の実施形態に係る地図生成装置について説明する。この実施形態に係る地図生成装置では、曲率χの変化量Δχがピーク値をとる点のみならず、0をとる点の情報も抽出し、直線区間または円弧区間で近似するものである。
【0046】
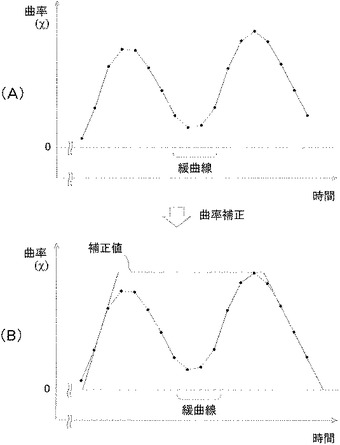
図6(A)に示すように、連続するカーブの間に緩やかな曲線(曲率小さい円弧区間を含む区間)がある道路を走行する場合、曲率χの変化量Δχがピーク値をとる点のみを抽出して曲率補正を行うと、同図(B)で示すように、当該緩曲線を挟んだ2つのカーブを含む領域で曲率補正を行ってしまう場合があり、かかる場合には、緩曲線とすべき区間を曲率が大きな円弧区間であるとして地図データが生成されてしまう。
【0047】
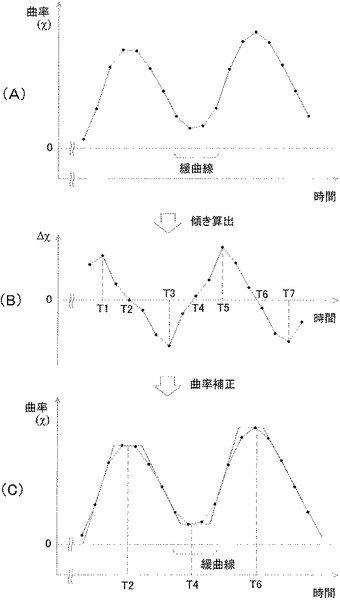
このため、図7(B)に示すように、曲率の変化量Δχがピーク値をとる点(T1,T3,T5,T7)のみならず、Δχが0をとる点(T2,T4,T6)も抽出し、これらΔχが0をとる点を含む領域を円弧区間と近似して、曲率補正を行う。
【0048】
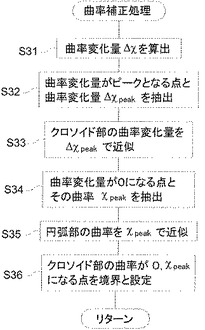
図8は、本発明の第2の実施形態に係る地図生成装置における曲率補正処理のフローチャートである。まず、曲率算出部34において算出された曲率χの値に基づき、曲率補正部36では、曲率χの変化量Δχの値を算出する(S31)。次いで、曲率変化量Δχがピークをとる点(図7(B)におけるT1,T3,T5,T7)と、各ピーク点における曲率変化量Δχpeakを抽出する(S32)。そして、曲率変化量Δχがピークをとる点を含む領域をクロソイド曲線区間と設定し、当該クロソイド曲線区間における曲率変化量をΔχpeakで近似する(S33)。
【0049】
また、曲率変化量Δχの値が正から負になる点(図7(B)におけるT2,T4,T6)と、その曲率χpeakを抽出し(S34)、これらの点を含む領域を円弧区間と設定するとともに、その曲率をχpeakと近似する(S35)。
【0050】
そして、各点において設定された曲率及び曲率変化量に基づき、前記第1実施形態と同様にして、クロソイド曲線区間の曲率が0、χpeakとなる点を、それぞれ直線区間、円弧区間との境界として設定する(S37)。
【0051】
これにより、緩やかな曲線を挟んだ2つのカーブを含む領域で曲率補正を行う場合であっても、当該緩曲線の区間を正確に抽出することができるので、より正確な地図情報を生成することが可能となる。
【0052】
(第3の実施形態)
以下、本発明の第3の実施形態に係る地図生成装置について説明する。この実施形態に係る地図生成装置では、過去に走行したことのある道路を走行した場合に、検出された位置情報に基づき算出された曲率データと、地図DBに記憶済みの曲率データとを用いて曲率データを更新した後に、曲率補正処理を行うものである。
【0053】
図9は、第3の実施形態に係る地図生成装置を備えたナビゲーション装置50を示すブロック図であり、図1のブロック図と比較すると、地図生成部52において曲率情報更新部54が更に備えられている点で相違する。なお、図9のブロック図において、図1で説明したのと同じ構成部材については、同じ符番を付して詳細な説明を省略する。
【0054】
曲率情報更新部52は、曲率算出部36において得られた曲率データを受信するとともに、対応する道路における曲率データが地図DB32に存在する場合は、この曲率データを地図DB32から読み出して、これらの加重平均をとることにより、当該道路における曲率データを更新する。その後、曲率補正部38において曲率補正処理が行われる。
【0055】
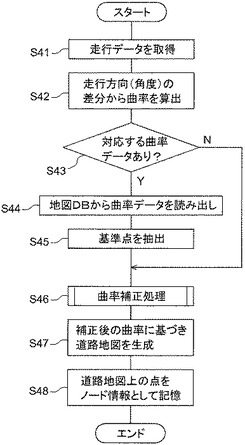
図10は、この実施形態における地図生成処理の手順を示すフローチャートである。地図生成装置10の起動後に車両を走行させると、車両位置検出部12において、現在走行中の車両の位置情報を含む走行データを取得し、地図生成部52の走行経路記憶部34に記憶される(S41)。次いで、曲率算出部36において、走行経路記憶部34に記憶されたサンプリング点の位置情報に基づき、走行方向の角度変化及び走行距離を算出し、これらの値に基づき、各サンプリング点における曲率χの値を算出する(S42)。
【0056】
次に、曲率情報更新部54は、上記の曲率χが算出された道路に対応する道路のノードデータが地図DBに含まれているか(すなわち、現在走行中の道路につき、道路地図が既に生成されているか否か)を判定する(S43)。この判定は、例えば、車両情報検出部において検出されたサンプリング点の経度・緯度情報とほぼ一致するノードデータが地図DB32に記憶されているか否か、あるいは、画像解析部16において解析された施設と同一の施設情報が地図DB32に記憶されているか否かにより、行うことができる。
【0057】
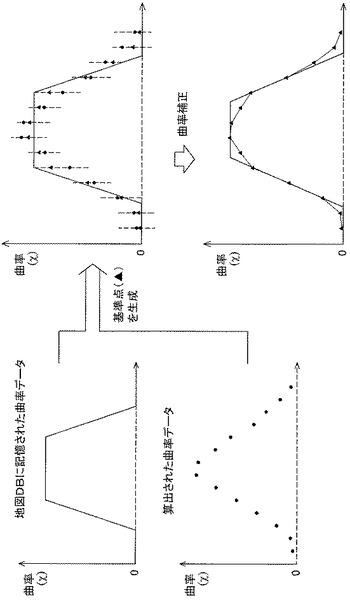
そして、現在走行中の道路に対応する道路データが地図DBに記憶されている場合には(ステップS43においてY)、曲率情報更新部54は、対応する道路のノードデータ(曲率データ)を読み出して(S44)、今回算出された曲率データとの平均値(あるいは所定の重み付け演算)を行うことで、曲率補正を行うべき基準点を算出する。
【0058】
すなわち、図11に示すように、曲率算出部36において算出されたサンプリング点における曲率の値と、地図DBに記憶された曲率との平均値を算出する(あるいは重み付け演算を行う)ことで、基準点(図11において▲で示した点)の曲率を算出する(S45)。そして、算出された基準点の曲率の値に基づき、第1の実施形態(あるいは第2の実施形態)で説明したのと同様の曲率補正処理を行う(S46)。
【0059】
ノード情報生成部40は、曲率補正処理が施された曲率の補正値に基づき、直線区間、クロソイド曲線区間及び円弧区間に区分けされた道路地図を生成する(S47)。そして、ノード情報生成部40は、生成された道路地図上の点をノード点として抽出し、当該ノード点における座標や道路種別の情報をノードデータとして地図DB32に出力する(S48)。これにより、地図DB32のノードデータが更新される。
【0060】
このように、同じ道路を走行する毎に、地図DBに記憶されるノードデータが更新されていくので、例えば普段から走行している道路について、より正確な道路地図を生成することができる。
【0061】
なお、現在走行中の道路に対応する道路データが地図DBに記憶されていない場合には(ステップS43でN)、前記第1の実施形態と同様に、曲率補正処理を行って道路地図を生成した後に、ノードデータを地図DB32に記憶する。
【0062】
上記実施形態では、直線区間と円弧区間との間の区間を、曲率が一定割合で変化するクロソイド曲線区間としているが、本発明はこれに限定されることはなく、あらゆるタイプの緩和曲線(例えば、スプライン曲線、ベジエ曲線)で当該区間を近似することができる。
【産業上の利用可能性】
【0063】
以上説明したように、本発明によれば、データ処理量を増加させることなく正確な地図データを生成することができ、例えば車両用のナビゲーション装置として有用である。
【符号の説明】
【0064】
10、50 ナビゲーション装置
12 車両情報検出部
20 ナビゲーション部
22、52 地図生成部
32 地図DB
34 走行経路記憶部
36 曲率算出部
38 曲率補正部
40 ノード情報生成部
54 曲率情報更新部
【技術分野】
【0001】
本発明は、地図データを自動的に作成する装置、方法及び車載用ナビゲーション装置に関するものである。
【背景技術】
【0002】
GPS受信機を用いて走行中の車両の位置を検出するとともに、検出された位置情報を予めデータベース化された地図データと照合することで、地図上の車両の位置を特定するナビゲーション装置が広く知られている。
【0003】
このようなナビゲーション装置で用いられる地図データは、例えば市販の道路地図を用いて、道路上の点を一定間隔でサンプリングしてノード点を抽出し、これらノード点の二次元座標の情報を記憶媒体に記憶することで生成される。このような地図データは、もともと精度の高い道路地図に基づき生成されるため、一般的に精度が高い。
【0004】
また、特許文献1記載の電子化道路地図では、記憶媒体に予め記憶されたノード点の情報のうち、互いに隣接する3つのノード点を通過する円の近似式を算出することで、当該ノードにおける曲率を得る。そして、算出された曲率の値に応じて、当該ノードを含む区間を、直線、円弧またはクロソイド曲線(直線から円弧に至る曲線)のいずれかによって近似して表示することで、限られたデータ量のもとで高い精度の道路地図を表示することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平9−185322号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
前述したように、従来のカーナビゲーション装置では、道路上の点を示すノード位置の正確な情報を含む地図データが記憶された地図データベース(例えば、DVD−ROMやHDD)が予め備えられている。しかし、この地図データベースを導入するコストが高いため、カーナビゲーション装置を低価格で提供することが困難であった。
【0007】
そこで、高価な地図データベースを省略し、車両が実際に走行した経路に基づいて地図データを作成していく構成とすることが、コストダウンの観点から好ましく、このような地図作成型のナビゲーション装置では、GPS受信機等の位置検出手段を用いて走行中の車両の位置(緯度・経度情報)を検出するとともに、車速センサや方向センサ等の各種センサを用いて、車両の走行距離や走行方向といった情報を検出し、走行した道路の距離、方向、交差点の位置等の情報を算出していくことで、地図データを作成することができる。
【0008】
しかし、位置センサの測定誤差により、従来の地図データベースと比べると、生成される地図データの精度が低くなってしまうため、ナビゲーション装置として用いることが難しい。そこで、上記特許文献1に記載の方法を適用し、走行した道路を直線、円弧またはクロソイド曲線のいずれかで近似して、より正確な地図データを生成することが好ましい。
【0009】
しかし、例えば図12(A)に示すように、円弧区間、クロソイド曲線区間、直線区間、クロソイド曲線区間、円弧区間から構成される道路において、上記特許文献1に記載の方法を適用すると、前述の位置センサ等の測定誤差により、曲率の算出値が図12(B)に示すようななだらかなものとなり、円弧区間、クロソイド曲線区間、直線区間の境界が不明確となり、正確な道路地図を再現することが困難となっていた。
【0010】
さらに、測定誤差が非常に大きい場合、あるいはハンドル操作を誤った場合に、測定データに揺れが生じることがあり(図12(A))、かかる場合に、従前のように、隣接する3つのノード点を通過する円の曲率を、最小二乗法を用いて算出すると、算出値に大きな飛びが生じる場合がある(図12(B))。かかる場合には、実際には直線区間であるにもかかわらず、円弧区間若しくはクロソイド曲線区間であると判定されてしまうため、正確な道路地図を再現する上で大きな障害となっていた。
【0011】
本発明は、上記に鑑みなされたものであり、正確な地図情報を生成することが可能な地図生成装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明に係る地図生成装置は、走行経路上のサンプリング点における位置情報を検出する位置検出部と、前記位置情報に基づき、前記サンプリング点における曲率を算出する曲率算出部と、前記走行経路が、直線区間、円弧区間及び緩和曲線区間のいずれかで近似されるように、前記走行経路における曲率を補正する曲率補正部と、補正後の曲率に基づいて、前記走行経路に対応する道路上のノードの位置を示すノード情報を生成するノード情報生成部と、前記ノード情報を記憶する記憶部とを備えた構成を有する。
【0013】
かかる構成により、走行経路における曲率が適正に補正され、補正後の曲率に基づいて走行経路に対応する地図情報が生成されるから、位置情報を検出する各種センサに測定誤差が生じた場合であっても、正確な地図情報を生成することが可能となる。
【0014】
本発明に係る地図生成装置において、前記曲率補正部は、前記走行経路における曲率変化量のピーク値Δχpeakを抽出するとともに、前記曲率変化量がピーク値をとる点を含む一定領域に対し、曲率変化量をΔχpeakとする緩和曲線区間として設定することが好ましい。また、前記走行経路における曲率のピーク値χpeakを抽出するとともに、前記曲率がピーク値をとる点を含む一定領域に対し、曲率をχpeakとする円弧区間として設定することが好ましい。
【0015】
本発明に係る地図生成装置において、前記曲率算出部は、隣接する前記サンプリング点における走行角度の変動量、及び、隣接する前記サンプリング点の距離に基づき、曲率の値を算出する。この構成により、簡単な演算処理により、サンプリング点における曲率の値を算出することができる。
【0016】
本発明に係る地図生成装置において、前記曲率補正部は、前記走行経路における曲率変化量が0となる点を含む一定領域に対し、前記直線区間または前記円弧区間として設定する。かかる構成により、例えば直線区間が短い経路を走行する場合でも、当該直線区間を適切に検出することができ、より正確な地図情報を生成することができる。
【0017】
本発明の地図生成装置は、前記曲率算出部で算出された曲率のデータを受信するとともに、前記走行経路に対応する曲率のデータが前記記憶部に記憶されている場合に、前記曲率算出部で算出された曲率の値と、前記記憶部に記憶された曲率の値に基づき、前記走行経路における曲率の値を更新する曲率更新部を更に備え、前記曲率補正部は、前記曲率更新部において更新された曲率の値に基づき、前記走行経路における曲率を補正する。かかる構成により、過去に走行したことのある走行経路に対する地図情報が更新されていくので、より正確な地図情報を生成することができる。
【0018】
本発明の地図生成方法は、走行経路上のサンプリング点における位置情報を検出する位置検出ステップと、前記位置情報に基づき、前記サンプリング点における曲率を算出する曲率算出ステップと、前記走行経路が、直線区間、円弧区間及び緩和曲線区間のいずれかで近似されるように、前記走行経路における曲率を補正する曲率補正ステップと、補正後の曲率に基づいて、前記走行経路に対応する道路上のノードの位置を示すノード情報を生成するノード情報生成ステップと、前記ノード情報を記憶する記憶ステップとを備えた構成を有する。かかる構成によっても、走行経路における曲率が適正に補正され、補正後の曲率に基づいて走行経路に対応する地図情報が生成されるから、位置情報を検出する各種センサに測定誤差が生じた場合であっても、正確な地図情報を生成することが可能となる。
【図面の簡単な説明】
【0019】
【図1】本発明の地図生成装置を適用した第1の実施形態に係るナビゲーション装置の構成を示すブロック図
【図2】走行経路上のサンプリング点における曲率を算出する方法を示す説明図
【図3】曲率補正処理を示すフローチャート
【図4】曲率補正を行う手順を示す説明図
【図5】ノードデータの生成処理を示すフローチャート
【図6】直線区間が短い場合の曲率補正の一例を示す説明図
【図7】第2の実施形態に係るナビゲーション装置における曲率補正処理の手順を示す説明図
【図8】第2の実施形態における曲率補正処理を示すフローチャート
【図9】第3の実施形態に係るナビゲーション装置の構成を示すブロック図
【図10】第3の実施形態における曲率補正処理を示すフローチャート
【図11】第3の実施形態に係るナビゲーション装置における曲率補正処理の手順を示す説明図
【図12】従来例に係る地図生成装置における曲率の算出値の一例を示す説明図
【発明を実施するための形態】
【0020】
本発明の好適な実施形態について、図面を参照しつつ説明する。
【0021】
(第1実施形態)
図1は、本発明の第1実施形態に係る地図生成装置を含む、車載用のナビゲーション装置の構成を示すブロック図である。ナビゲーション装置10は、車両情報検出部12、撮像部14、画像解析部16、表示部18、ナビゲーション部20と、地図生成部22とを備える。
【0022】
車両情報検出部12は、例えばGPS受信部24、車速センサ26、方向センサ28を備えており、GPS受信部24は、GPS衛星からの電波信号を受信して、車両の位置情報(経度及び緯度情報)を取得する。車速センサ26は、車両の走行速度を測定して、走行速度情報を取得する。また、方向センサ28は、地磁気センサあるいはジャイロセンサであり、車両が走行する絶対方位を示す走行方向情報を取得する。
【0023】
車両情報検出部12には、上記センサの他に、車両の加速度を検出する加速度センサ、アクセル開度を検出するアクセル開度センサ、ブレーキペダルの操作量を検出するブレーキセンサ、ステアリングの蛇角を検出するステアリングセンサ等を含めることができる。
【0024】
撮像部14は、例えば車両のフロントガラス付近に取り付けられたCCDカメラあるいはCMOSカメラであり、例えば市販のドライブレコーダーに備えられたカメラを用いることができる。撮像部14は、車両前方の状況を撮像して撮像画像を生成するとともに、ホワイトバランス処理、ガンマ補正等の信号処理を施した撮像画像データを出力する。
【0025】
画像解析部16は、撮像部14において得られた画像に対し、周知の画像解析を施すとともに、予め記憶された施設(道路標識、信号、ガソリンスタンド、コンビニ、ホテル等)の特徴量を示すデータと対比することで、現在走行中の道路付近における施設の有無、施設のタイプを検出する。
【0026】
表示部18は、例えば液晶ディスプレイであり、後述する地図DB32に記憶されている地図データによって生成される地図画像と、自車位置を示すインジケータ等とを重ねて表示することで、運転手に地図情報を提供する。また、図示しない入力部を介して目的地情報が入力される場合は、表示部18は、目的地までの経路情報を併せて表示する。
【0027】
ナビゲーション部20は、ナビゲーション機能を実現するための経路情報を生成するナビECU30と、地図情報を記憶する地図データベース(地図DB)32とを備えている。ナビECU30は、利用者によって選択された目的地までの経路情報を地図画像に重ねて表示部18に表示させるとともに、車両情報検出部12において検出された車両の位置、速度、走行方向等の情報に基づき、車両の現在位置を表示部18上の地図画像に重ねて表示する。
【0028】
地図DB32には、ノードデータ、施設データ等の道路地図を構成するのに必要な情報が記憶されている。ノードデータは、地図画像を構成する道路の位置及び形状に関するものであり、例えば道路の分岐点(交差点)を含む道路上の点(ノード点)の座標(経度・緯度)、当該ノード点が含まれる道路種別(例えば、高速道路、幹線道路、市道といった情報)、当該ノード点における道路のタイプ(直線区間、円弧区間、クロソイド曲線区間)及び曲率のデータが含まれる。また、施設データは、各ノード点の付近に存在する施設情報に関するデータを含み、ノードデータと関連づけて記憶されている。
【0029】
地図生成部22は、車両が走行した経路に基づいて道路地図を生成するものであり、走行経路記憶部34、曲率算出部36,曲率補正部38、ノード情報生成部40を備える。地図生成部22において生成された道路地図のデータ(ノードデータ)は、ナビゲーション部20の地図DB32に順次記憶される。
【0030】
走行経路記憶部34は、車両情報検出部12において一定時間間隔で検出された車両の位置情報(経度・緯度情報)を、順次記憶する。ここで、車両情報検出部12において位置情報が検出された点を「サンプリング点」と称する。なお、サンプリング点の位置情報として、GPS受信部26において受信された位置情報をそのまま用いても良いが、車速センサ28で検出された車速情報及び方向センサ30で検出された走行方向情報を組み合わせて、サンプリング点の位置情報を補正しても良い。
【0031】
曲率算出部36は、走行経路記憶部34で得られたサンプリング点の位置情報に基づき、各サンプリング点における曲率χの値を、以下の方法により算出する。図2において、点P0〜P3は、車両情報検出部12によって検出されたサンプリング点であり、同図においては、点P0〜P2が、基準点Oを中心とする半径Rの円周上に位置しているものとする。また、点P0、基準点O、点P1がなす角をθ1とし、点P1、基準点O、点P2がなす角をθ2とする。
【0032】
この場合、点P0、基準点O、点P1によって形成される三角形は二等辺三角形となるから、点P0と点P1の間の距離L1は、次式で表すことができる。
L1=2・Rsin(θ1/2) ・・・(1)
ここで、サンプリングの時間間隔が短く、θ1が微小角であると近似することができるから、上式(1)は、次のようになる。
R=(1/χ)=L1/θ1 ・・・(2)
【0033】
ここで、L1の値は、走行経路記憶部34で得られた車両の位置情報に基づき、容易に算出することができる。また、図2において、点P0から点P1に至る線分を延長した線と、点P1からP2に至る線分とがなす角がθ1となるから、角度θ1は、点P1における走行方向の角度変化を示すこととなる。
【0034】
このように、サンプリング点の間隔L1と、車両の走行角度の変化量θ1に基づき、上記の(2)式により、曲率χ(=1/R)の値を算出することができる。このため、円の最小二乗法に基づき曲率を算出する必要がなくなり、曲率χの算出に要する処理量を低減することができる。また、曲率χの算出値の飛び(図12(B)参照)が生じるおそれをなくすことができる。
【0035】
また、点P1、基準点O、点P2によって形成される三角形も二等辺三角形となるため、上記と同様に、点P1と点P2の距離L2と、点P2における走行角度の変化量(=θ2)に基づき、曲率χ(=1/R)を算出することができる。なお、位置センサ等の測定誤差を考慮し、上記方法で算出された複数の曲率の平均値を算出して、最終的な曲率χの値を生成するようにしても良い。
【0036】
曲率補正部38は、曲率算出部36において算出された曲率χの値を補正し、車両が走行した道路を、直線区間、円弧区間、クロソイド曲線区間のいずれかに分類できるようにする。ここで、クロソイド曲線区間とは、曲率が一定の割合で増加する区間である。直線で近似される直線区間と、曲率が一定の円弧区間とを直接に接続してしまうと、車両の運転手は、直線区間と円弧区間の接続部において、円弧の曲率に対応する操舵角まで一気にハンドルを操作する必要が生じる。そこで、直線で近似される直線区間と、円弧で近似される円弧区間との間に、曲率が一定の割合で増加するクロソイド曲線区間が設けられており、これにより、運転手は徐々にステアリングを操作することで、直線区間からカーブに至る経路を通過することができる。
【0037】
曲率補正部38における曲率補正処理について、図3のフローチャート及び図4の説明図を用いて説明する。上記方法により算出された曲率χの算出値は、各種センサの測定誤差等の要因により、図4(A)に示すようになだらかに変化している場合が多く、直線区間、円弧区間、クロソイド曲線区間の境界が不明確となっていた。
【0038】
曲率補正部38では、まず、隣接する2つのサンプリング点間の曲率χの変化量Δχを算出し(S11)、図4(B)に示すような曲率変化量Δχの分布を得る。次に、曲率変化量Δχのピーク値Δχpeakと、このピーク値をとる点(図4(B)では時間T1)を抽出し(S12)、この値Δχpeakを、クロソイド曲線区間における曲率χの変化量(一定値)と近似する(図4(C)の傾きΔχpeakの直線)(S13)。
【0039】
次に、曲率χがピーク値χpeakをとる点(T2)を検出し(S14)、当該T2を含む領域を、曲率χが一定(χpeak)の円弧区間と近似する(S15)。
【0040】
そして、カーブ区間における曲率χの直線と、クロソイド曲線区間の曲率χの直線の交点を、クロソイド曲線区間とカーブ区間の境界と設定する。また、クロソイド曲線区間に対応する曲率χの直線と、曲率χが0となる点との交点を、直線区間とクロソイド曲線区間との境界と設定する(S16)。これにより、車両が走行した経路を、直線区間、クロソイド曲線区間及び円弧区間に分類することができる。
【0041】
ノード情報生成部40は、曲率補正部38によって補正された各サンプリング点の曲率に基づき、車両が走行した道路形状を再現するとともに、再現された道路上で任意に選択された点及び交差点(ノード点)の座標を算出し、ノードデータとして地図DB32に出力する。地図DB32に記憶されたノードデータは、ナビゲーション動作が行われる際に読み出される。
【0042】
以下、上記構成による地図生成装置の動作について、図5のフローチャートを参照して説明する。地図生成装置10の起動後に車両を走行させると、車両位置検出部12において、現在走行中の車両の位置情報を含む走行データを取得する(S21)。また、撮像部16において車両の前方の状況を撮影し、画像解析部28において、当該撮影画像に含まれる施設の有無及び施設タイプの情報を取得する。
【0043】
車両位置検出部12において検出されたサンプリング点の位置情報を示すデータは、地図生成部22の走行経路記憶部34に記憶される。曲率算出部36において、走行経路記憶部34に記憶されたサンプリング点の位置情報に基づき、走行方向の角度変化及びサンプリング点間の距離を算出するとともに、これら角度変化及び距離の情報に基づき、各サンプリング点における曲率χの値を算出する(S22)。これにより、走行経路上の道路における曲率χを算出するにあたり、円の最小二乗法を用いる必要がなく、処理に必要な演算量を低減することができる。
【0044】
曲率算出部36で得られた曲率χの情報は、曲率補正部38に送られ、ここで前述した曲率補正処理を行うことで、サンプリング点における曲率の値を補正するとともに、走行経路を直線区間、クロソイド曲線区間及び円弧区間のいずれかに分類される(S23)。ノード情報生成部40は、曲率補正処理が施された曲率の補正値に基づき、直線区間、クロソイド曲線区間及び円弧区間に区分けされた道路地図を生成する(S24)。そして、ノード情報生成部40は、生成された道路地図上の点をノード点として抽出し、当該ノード点における座標や道路種別の情報をノードデータとして地図DB32に出力する(S25)。
【0045】
(第2の実施形態)
以下、本発明の第2の実施形態に係る地図生成装置について説明する。この実施形態に係る地図生成装置では、曲率χの変化量Δχがピーク値をとる点のみならず、0をとる点の情報も抽出し、直線区間または円弧区間で近似するものである。
【0046】
図6(A)に示すように、連続するカーブの間に緩やかな曲線(曲率小さい円弧区間を含む区間)がある道路を走行する場合、曲率χの変化量Δχがピーク値をとる点のみを抽出して曲率補正を行うと、同図(B)で示すように、当該緩曲線を挟んだ2つのカーブを含む領域で曲率補正を行ってしまう場合があり、かかる場合には、緩曲線とすべき区間を曲率が大きな円弧区間であるとして地図データが生成されてしまう。
【0047】
このため、図7(B)に示すように、曲率の変化量Δχがピーク値をとる点(T1,T3,T5,T7)のみならず、Δχが0をとる点(T2,T4,T6)も抽出し、これらΔχが0をとる点を含む領域を円弧区間と近似して、曲率補正を行う。
【0048】
図8は、本発明の第2の実施形態に係る地図生成装置における曲率補正処理のフローチャートである。まず、曲率算出部34において算出された曲率χの値に基づき、曲率補正部36では、曲率χの変化量Δχの値を算出する(S31)。次いで、曲率変化量Δχがピークをとる点(図7(B)におけるT1,T3,T5,T7)と、各ピーク点における曲率変化量Δχpeakを抽出する(S32)。そして、曲率変化量Δχがピークをとる点を含む領域をクロソイド曲線区間と設定し、当該クロソイド曲線区間における曲率変化量をΔχpeakで近似する(S33)。
【0049】
また、曲率変化量Δχの値が正から負になる点(図7(B)におけるT2,T4,T6)と、その曲率χpeakを抽出し(S34)、これらの点を含む領域を円弧区間と設定するとともに、その曲率をχpeakと近似する(S35)。
【0050】
そして、各点において設定された曲率及び曲率変化量に基づき、前記第1実施形態と同様にして、クロソイド曲線区間の曲率が0、χpeakとなる点を、それぞれ直線区間、円弧区間との境界として設定する(S37)。
【0051】
これにより、緩やかな曲線を挟んだ2つのカーブを含む領域で曲率補正を行う場合であっても、当該緩曲線の区間を正確に抽出することができるので、より正確な地図情報を生成することが可能となる。
【0052】
(第3の実施形態)
以下、本発明の第3の実施形態に係る地図生成装置について説明する。この実施形態に係る地図生成装置では、過去に走行したことのある道路を走行した場合に、検出された位置情報に基づき算出された曲率データと、地図DBに記憶済みの曲率データとを用いて曲率データを更新した後に、曲率補正処理を行うものである。
【0053】
図9は、第3の実施形態に係る地図生成装置を備えたナビゲーション装置50を示すブロック図であり、図1のブロック図と比較すると、地図生成部52において曲率情報更新部54が更に備えられている点で相違する。なお、図9のブロック図において、図1で説明したのと同じ構成部材については、同じ符番を付して詳細な説明を省略する。
【0054】
曲率情報更新部52は、曲率算出部36において得られた曲率データを受信するとともに、対応する道路における曲率データが地図DB32に存在する場合は、この曲率データを地図DB32から読み出して、これらの加重平均をとることにより、当該道路における曲率データを更新する。その後、曲率補正部38において曲率補正処理が行われる。
【0055】
図10は、この実施形態における地図生成処理の手順を示すフローチャートである。地図生成装置10の起動後に車両を走行させると、車両位置検出部12において、現在走行中の車両の位置情報を含む走行データを取得し、地図生成部52の走行経路記憶部34に記憶される(S41)。次いで、曲率算出部36において、走行経路記憶部34に記憶されたサンプリング点の位置情報に基づき、走行方向の角度変化及び走行距離を算出し、これらの値に基づき、各サンプリング点における曲率χの値を算出する(S42)。
【0056】
次に、曲率情報更新部54は、上記の曲率χが算出された道路に対応する道路のノードデータが地図DBに含まれているか(すなわち、現在走行中の道路につき、道路地図が既に生成されているか否か)を判定する(S43)。この判定は、例えば、車両情報検出部において検出されたサンプリング点の経度・緯度情報とほぼ一致するノードデータが地図DB32に記憶されているか否か、あるいは、画像解析部16において解析された施設と同一の施設情報が地図DB32に記憶されているか否かにより、行うことができる。
【0057】
そして、現在走行中の道路に対応する道路データが地図DBに記憶されている場合には(ステップS43においてY)、曲率情報更新部54は、対応する道路のノードデータ(曲率データ)を読み出して(S44)、今回算出された曲率データとの平均値(あるいは所定の重み付け演算)を行うことで、曲率補正を行うべき基準点を算出する。
【0058】
すなわち、図11に示すように、曲率算出部36において算出されたサンプリング点における曲率の値と、地図DBに記憶された曲率との平均値を算出する(あるいは重み付け演算を行う)ことで、基準点(図11において▲で示した点)の曲率を算出する(S45)。そして、算出された基準点の曲率の値に基づき、第1の実施形態(あるいは第2の実施形態)で説明したのと同様の曲率補正処理を行う(S46)。
【0059】
ノード情報生成部40は、曲率補正処理が施された曲率の補正値に基づき、直線区間、クロソイド曲線区間及び円弧区間に区分けされた道路地図を生成する(S47)。そして、ノード情報生成部40は、生成された道路地図上の点をノード点として抽出し、当該ノード点における座標や道路種別の情報をノードデータとして地図DB32に出力する(S48)。これにより、地図DB32のノードデータが更新される。
【0060】
このように、同じ道路を走行する毎に、地図DBに記憶されるノードデータが更新されていくので、例えば普段から走行している道路について、より正確な道路地図を生成することができる。
【0061】
なお、現在走行中の道路に対応する道路データが地図DBに記憶されていない場合には(ステップS43でN)、前記第1の実施形態と同様に、曲率補正処理を行って道路地図を生成した後に、ノードデータを地図DB32に記憶する。
【0062】
上記実施形態では、直線区間と円弧区間との間の区間を、曲率が一定割合で変化するクロソイド曲線区間としているが、本発明はこれに限定されることはなく、あらゆるタイプの緩和曲線(例えば、スプライン曲線、ベジエ曲線)で当該区間を近似することができる。
【産業上の利用可能性】
【0063】
以上説明したように、本発明によれば、データ処理量を増加させることなく正確な地図データを生成することができ、例えば車両用のナビゲーション装置として有用である。
【符号の説明】
【0064】
10、50 ナビゲーション装置
12 車両情報検出部
20 ナビゲーション部
22、52 地図生成部
32 地図DB
34 走行経路記憶部
36 曲率算出部
38 曲率補正部
40 ノード情報生成部
54 曲率情報更新部
【特許請求の範囲】
【請求項1】
走行経路上のサンプリング点における位置情報を検出する位置検出部と、
前記位置情報に基づき、前記サンプリング点における曲率を算出する曲率算出部と、
前記走行経路が、直線区間、円弧区間及び緩和曲線区間のいずれかで近似されるように、前記走行経路における曲率を補正する曲率補正部と、
補正後の曲率に基づいて、前記走行経路に対応する道路上のノードの位置を示すノード情報を生成するノード情報生成部と、
前記ノード情報を記憶する記憶部とを備えたことを特徴とする地図生成装置。
【請求項2】
前記曲率補正部は、前記走行経路における曲率変化量のピーク値Δχpeakを抽出するとともに、前記曲率変化量がピーク値をとる点を含む一定領域に対し、曲率変化量をΔχpeakとする緩和曲線区間として設定することを特徴とする、請求項1記載の地図生成装置。
【請求項3】
前記曲率補正部は、前記走行経路における曲率のピーク値χpeakを抽出するとともに、前記曲率がピーク値をとる点を含む一定領域に対し、曲率をχpeakとする円弧区間として設定することを特徴とする、請求項1記載の地図生成装置。
【請求項4】
前記曲率算出部は、隣接する前記サンプリング点における走行角度の変動量、及び、隣接する前記サンプリング点の距離に基づき、曲率の値を算出することを特徴とする、請求項1記載の地図生成装置。
【請求項5】
前記曲率補正部は、前記走行経路における曲率変化量が0となる点を含む一定領域に対し、前記円弧区間として設定することを特徴とする、請求項2記載の地図生成装置。
【請求項6】
前記曲率算出部で算出された曲率のデータを受信するとともに、前記走行経路に対応する曲率のデータが前記記憶部に記憶されている場合に、前記曲率算出部で算出された曲率の値と、前記記憶部に記憶された曲率の値に基づき、前記走行経路における曲率の値を更新する曲率更新部を更に備え、
前記曲率補正部は、前記曲率更新部において更新された曲率の値に基づき、前記走行経路における曲率を補正することを特徴とする、請求項1記載の地図生成装置。
【請求項7】
請求項1ないし6のいずれか記載の地図生成装置を備え、
車両の現在位置情報と、前記記憶部に記憶された前記道路情報に基づき、予め設定された目的地までの経路情報を算出するナビゲーション部と、
前記車両の現在位置情報を前記道路地図に重ねて表示する表示部を備えたことを特徴とする車載用ナビゲーション装置。
【請求項8】
走行経路上のサンプリング点における位置情報を検出する位置検出ステップと、
前記位置情報に基づき、前記サンプリング点における曲率を算出する曲率算出ステップと、
前記走行経路が、直線区間、円弧区間及び緩和曲線区間のいずれかで近似されるように、前記走行経路における曲率を補正する曲率補正ステップと、
補正後の曲率に基づいて、前記走行経路に対応する道路上のノードの位置を示すノード情報を生成するノード情報生成ステップと、
前記ノード情報を記憶する記憶ステップとを備えたことを特徴とする地図生成方法。
【請求項1】
走行経路上のサンプリング点における位置情報を検出する位置検出部と、
前記位置情報に基づき、前記サンプリング点における曲率を算出する曲率算出部と、
前記走行経路が、直線区間、円弧区間及び緩和曲線区間のいずれかで近似されるように、前記走行経路における曲率を補正する曲率補正部と、
補正後の曲率に基づいて、前記走行経路に対応する道路上のノードの位置を示すノード情報を生成するノード情報生成部と、
前記ノード情報を記憶する記憶部とを備えたことを特徴とする地図生成装置。
【請求項2】
前記曲率補正部は、前記走行経路における曲率変化量のピーク値Δχpeakを抽出するとともに、前記曲率変化量がピーク値をとる点を含む一定領域に対し、曲率変化量をΔχpeakとする緩和曲線区間として設定することを特徴とする、請求項1記載の地図生成装置。
【請求項3】
前記曲率補正部は、前記走行経路における曲率のピーク値χpeakを抽出するとともに、前記曲率がピーク値をとる点を含む一定領域に対し、曲率をχpeakとする円弧区間として設定することを特徴とする、請求項1記載の地図生成装置。
【請求項4】
前記曲率算出部は、隣接する前記サンプリング点における走行角度の変動量、及び、隣接する前記サンプリング点の距離に基づき、曲率の値を算出することを特徴とする、請求項1記載の地図生成装置。
【請求項5】
前記曲率補正部は、前記走行経路における曲率変化量が0となる点を含む一定領域に対し、前記円弧区間として設定することを特徴とする、請求項2記載の地図生成装置。
【請求項6】
前記曲率算出部で算出された曲率のデータを受信するとともに、前記走行経路に対応する曲率のデータが前記記憶部に記憶されている場合に、前記曲率算出部で算出された曲率の値と、前記記憶部に記憶された曲率の値に基づき、前記走行経路における曲率の値を更新する曲率更新部を更に備え、
前記曲率補正部は、前記曲率更新部において更新された曲率の値に基づき、前記走行経路における曲率を補正することを特徴とする、請求項1記載の地図生成装置。
【請求項7】
請求項1ないし6のいずれか記載の地図生成装置を備え、
車両の現在位置情報と、前記記憶部に記憶された前記道路情報に基づき、予め設定された目的地までの経路情報を算出するナビゲーション部と、
前記車両の現在位置情報を前記道路地図に重ねて表示する表示部を備えたことを特徴とする車載用ナビゲーション装置。
【請求項8】
走行経路上のサンプリング点における位置情報を検出する位置検出ステップと、
前記位置情報に基づき、前記サンプリング点における曲率を算出する曲率算出ステップと、
前記走行経路が、直線区間、円弧区間及び緩和曲線区間のいずれかで近似されるように、前記走行経路における曲率を補正する曲率補正ステップと、
補正後の曲率に基づいて、前記走行経路に対応する道路上のノードの位置を示すノード情報を生成するノード情報生成ステップと、
前記ノード情報を記憶する記憶ステップとを備えたことを特徴とする地図生成方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−15735(P2013−15735A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−149514(P2011−149514)
【出願日】平成23年7月5日(2011.7.5)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月5日(2011.7.5)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]