
地図情報作成装置及び車両の操作特性変更システム
【課題】拡張性・保守性に優れ、記憶容量が小さい地図情報を作成できる地図情報作成装置、及び車両の操作特性変更システムを提供すること。
【解決手段】車両を運転するドライバのドライバ操作の変化を検出するドライバ操作変化検出手段4、7と、前記ドライバ操作変化検出手段4、7が前記ドライバ操作の変化を検出したときに、前記車両の位置情報を取得する位置情報取得手段8と、前記ドライバ操作の変化と、そのドライバ操作の変化があったときの前記位置情報とを関連づけて記憶する地図情報作成手段6と、を備えることを特徴とする地図情報作成装置。
【解決手段】車両を運転するドライバのドライバ操作の変化を検出するドライバ操作変化検出手段4、7と、前記ドライバ操作変化検出手段4、7が前記ドライバ操作の変化を検出したときに、前記車両の位置情報を取得する位置情報取得手段8と、前記ドライバ操作の変化と、そのドライバ操作の変化があったときの前記位置情報とを関連づけて記憶する地図情報作成手段6と、を備えることを特徴とする地図情報作成装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両を運転するドライバのドライバ操作の変化と、そのドライバ操作の変化があったときにおける車両の位置情報とを関連づけて地図情報を作成する地図情報作成装置、及び地図情報に基づいて車両の操作特性を変更する車両の操作特性変更システムに関する。
【背景技術】
【0002】
ドライバの操作を学習し、その結果を様々に利用する技術が知られている。例えば、ドライバの操作を学習して車両制御用プログラムを作成し、それを特定地域毎に記憶し、車両制御に利用する技術が開示されている(特許文献1参照)。
また、GPS情報とブレーキ踏込圧やアクセル踏込圧等の運転操作データとを、時系列的にメモリカードに記憶し、その運転操作データを自動車の教習に利用する技術が開示されている(特許文献2参照)。
【特許文献1】特開平5−58200号公報
【特許文献2】特開平10−97179号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、特許文献1の技術は、車両制御に依存した車両制御用プログラムを作成するため、新たな車両制御を追加する場合や、車両制御に変更があった場合には、作成した車両制御プログラム全ての変更が必要となり、拡張性・保守性に乏しいという問題がある。
【0004】
また、特許文献2の技術は、運転操作データを単純に時系列的に記憶するものであるから、記憶データに冗長性があり、運転操作データの記憶容量が大きくなってしまうという問題がある。
【0005】
本発明は以上の点に鑑みなされたものであり、拡張性・保守性に優れ、記憶容量が小さい地図情報を作成できる地図情報作成装置、及び車両の操作特性変更システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)請求項1の発明に係る地図情報作成装置は、車両を運転するドライバのドライバ操作の変化と、そのドライバ操作の変化があったときの位置情報とを関連づけて地図情報を作成する。この地図情報は、例えば、車両制御等に利用することができるが、地図情報を利用する車両制御等のアプリケーション側には依存しない。よって、地図情報を利用する新たなアプリケーションを追加する場合や、アプリケーション側に変更がある場合にも、地図情報を変更する必要がない。すなわち、本発明の地図情報作成装置は、拡張性・保守性に優れた地図情報を作成することができる。
【0007】
また、本発明の地図情報作成装置は、ドライバ操作の変化を検出したときに、ドライバ操作の変化と、対応する位置情報とを記憶するので、例えば、所定時間ごとに自動的に記憶を行う場合と比べて、地図情報の記憶容量を小さくすることができる。
(2)請求項2の発明に係る地図情報作成装置は、同種の前記ドライバ操作の変化が複数あり、それらに対応する複数の位置情報が所定範囲内にあるときは、同種のドライバ操作の変化に関連づける位置情報を、複数の位置情報を平均化した平均位置情報とする。
【0008】
このことにより、記憶容量の低減や、地図情報の簡素化による利用性の向上を図ることができる。
(3)請求項3の発明に係る地図情報作成装置では、位置情報に、車両の方位が含まれる。そのため、例えば、2つの位置情報が、車両の緯度、経度は同じであり、車両の方位のみが異なる場合でも、それら2つの位置情報を、異なるものとして認識することができる。
(4)請求項4の発明に係る車両の操作特性変更システムは、地図情報作成装置で作成した地図情報に基づき、操作特性変更手段により、車両の操作特性を変更することができる。この地図情報は、操作特性変更手段には依存しないので、操作特性変更手段に新たなアプリケーションを追加する場合や、操作特性変更手段に変更がある場合にも、地図情報を変更する必要がない。すなわち、本発明に係る車両の操作特性変更システムは、拡張性・保守性に優れている。
【0009】
また、本発明における地図情報は情報量が小さいので、地図情報を記憶する記憶容量を小さくすることができ、地図情報の読み込み処理を簡素化することができる。
【発明を実施するための最良の形態】
【0010】
本発明を実施例に基づいて説明する。
【実施例】
【0011】
1.操作特性変更システム1の構成
本発明の地図情報作成装置を適用した操作特性変更システム1の構成を図1に基づいて説明する。
【0012】
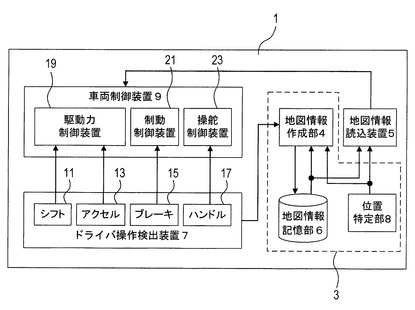
操作特性変更システム1は、地図情報作成装置3、地図情報読込装置5、ドライバ操作検出装置7、及び車両制御装置9から構成される。
地図情報作成装置3は、地図情報作成部4、地図情報記憶部6、及び位置特定部8から構成される。地図情報作成部4は、ドライバ操作検出装置7から、後述するドライバ操作情報を受信し、そのドライバ操作情報と、位置特定部8から取得した、ドライバ操作情報を受信したときにおける車両の位置情報とに基づき、地図情報を作成し、地図情報記憶部6に記憶する。なお、位置特定部8は、GPSにより車両の位置及び方位を取得する。
【0013】
地図情報読込装置5は、地図情報作成装置3から、所定の地図情報を読み出し、車両制御装置9に出力する。
ドライバ操作検出装置7は、ドライバ操作情報を検出し、検出したドライバ操作情報を、地図情報作成装置3と、車両制御装置9とに、それぞれ出力する。ドライバ操作情報としては、シフト11の操作情報、アクセル13の操作情報、ブレーキ15の操作情報、及びハンドル17の操作情報がある。
【0014】
車両制御装置9は、駆動力制御装置19、制動制御装置21、及び操舵制御装置23から構成され、それぞれ、ドライバ操作検出装置7から受信したドライバ操作情報に基づき、車両の駆動力、車両の制動、車両の操舵を制御する。例えば、アクセル操作のドライバ操作情報を受信したとき、駆動力制御装置19は、所定の加速ゲインを用いて加速を行う。また、ブレーキ操作のドライバ操作情報を受信したとき、制動制御装置21は、所定の制動ゲインを用いて制動を行う。また、ハンドル操作のドライバ操作情報を受信したとき、操舵制御装置23は、所定の操舵アシストゲインを用いて操舵アシストを行う。
【0015】
また、車両制御装置9は、地図情報読込装置5から受信した地図情報に基づき、制御に用いるゲイン(加速ゲイン、制動ゲイン、操舵アシストゲイン)を変更する。なお、このゲイン変更の処理については後に詳述する。
【0016】
2.地図情報作成装置3が実行する処理
地図情報作成装置3が実行する処理を、図2及び図3のフローチャートに基づいて説明する。
【0017】
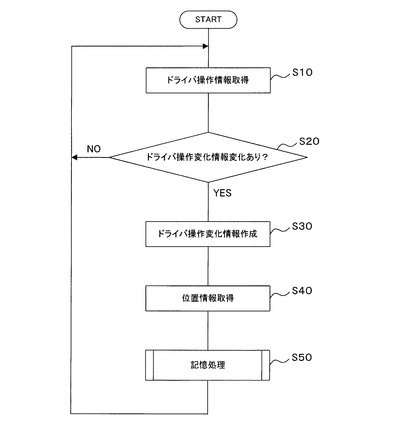
図2のステップ10では、ドライバ操作検出装置7が出力するドライバ操作情報を取得する。
ステップ20では、ドライバ操作情報に所定の変化があったか否かを判断する。ドライバ操作情報の変化としては、アクセルON、アクセルOFF、ブレーキON、ブレーキOFF、操舵開始、操舵終了、保舵開始、保舵終了などがある。ここで、操舵開始とは、ハンドルがニュートラルの状態から、左右どちらかに操作され、その操作量が所定の閾値を越えることをいう。操舵終了とは、操舵開始の後、ハンドルをニュートラルの状態に戻し、ハンドルの操作量が、所定の閾値を下回ることをいう。保舵開始とは、ハンドルが左右どちらかに操作された状態において、ハンドルの単位時間あたりの操作量が、所定の閾値を下回ることをいう。保舵終了とは、保舵開始の後、ハンドルの単位時間あたりの操作量が所定の閾値を越えることをいう。ドライバ操作情報に変化があった場合はステップ30に進み、ドライバ操作情報に変化がなかった場合はステップ10に戻る。
【0018】
ステップ30では、ドライバ操作変化情報を作成する。ドライバ操作変化情報とは、前記ステップ20で検出したドライバ操作情報の変化を表す情報である。
ステップ40では、その時点における車両の位置情報(車両の緯度、経度、方位)を位置特定部8から取得する。
【0019】
ステップ50では、前記ステップ30で作成したドライバ操作変化情報と、そのドライバ操作変化情報に対応する位置情報とを関連づけて地図情報を作成し、この地図情報を地図情報記憶部6に記憶する。
【0020】
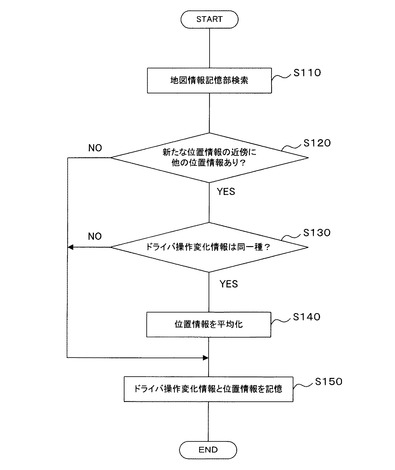
次に、前記ステップ50にて地図情報を作成し、地図情報記憶部6に記憶する方法を、図3のフローチャートに基づいてさらに詳細に説明する。
ステップ110では、地図情報記憶部6に既に記憶されているドライバ操作変化情報を検索する。
【0021】
ステップ120では、新たに記憶しようとするドライバ操作変化情報に対応する位置情報(前記ステップ40にて取得した位置情報)と、地図情報記憶部6に既に記憶されているドライバ操作変化情報に対応する位置情報とが、所定の範囲内であるか否かを判断する。所定の範囲内である場合はステップ130に進み、範囲外である場合はステップ150に進む。なお、位置情報が所定の範囲内であるとは、緯度、経度、車両方位の全てが、所定の範囲内であることをいう。
【0022】
ステップ130では、前記ステップ120にて、位置情報が所定範囲内であると判断したドライバ操作変化情報が、同一種であるか否かを判断する。同一種である場合はステップ140に進み、同一種でない場合は、ステップ150に進む。なお、ドライバ操作変化情報が同一種とは、ドライバが操作する対象(アクセル、ブレーキ、ハンドル、シフト)が同一であるだけではなく、操作における変化の種類まで同一であることをいう。例えば、ブレーキON同士は同一種であるが、ブレーキONとブレーキOFFとは同一種ではない。
【0023】
ステップ140では、新たに作成したドライバ操作変化情報の位置情報と、既に記憶されたドライバ操作変化情報の位置情報との、平均化された位置情報を算出する。例えば、ある種のドライバ操作変化情報が既に1回記憶され、その位置情報の経度がX1、緯度がY1であったとする。そして、新たに作成された、同一種のドライバ操作変化情報の位置情報における経度がX2、緯度がY2であったとする。この場合、既に記憶されたドライバ操作変化情報の位置情報と、新たに作成したドライバ操作変化情報の位置情報との、平均化された位置情報の経度Xav、緯度Yavを、次の式により算出する。
(式1)Xav=X1+(X2−X1)/2
(式2)Yav=Y1+(Y2−Y1)/2
また、ある種のドライバ操作変化情報が、所定範囲内で既にn−1回記憶され、それらの平均位置情報の経度がXn-1、緯度がYn-1であったとする。そして、新たに作成された、同一種のドライバ操作変化情報の位置情報における経度がXn、緯度がYnであったとする。この場合、既に記憶されたドライバ操作変化情報の位置情報と、新たに作成したドライバ操作変化情報の位置情報との、平均化された位置情報の経度Xav、緯度Yavを、次の式により算出する。なお、nは2以上の整数である。
(式3)Xav=Xn-1+(Xn−Xn-1)/n
(式4)Yav=Yn-1+(Yn−Yn-1)/n
ステップ150では、新たに記憶するドライバ操作変化情報と、それに対応する位置情報との組み合わせを、地図情報として地図情報記憶部6に記憶する。ここで、前記ステップ120又はステップ130にてNOと判断した場合は、前記ステップ40で取得した位置情報をそのまま記憶する。一方、前記ステップ140にて平均位置情報を算出した場合は、新たに記憶するドライバ操作変化情報の位置情報として、前記ステップ140にて算出した平均位置情報を用いる。なお、この場合、それまで記憶されていた位置情報は削除する。よって、同一種のドライバ操作変化情報は、所定範囲内で、1つのみ記憶される。
【0024】
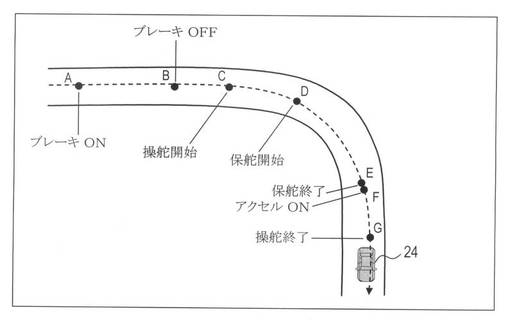
図4及び表1に基づいて、車両の走行に応じて作成された地図情報の例を示す。
図4に示すように、車両24が地点A〜Gを順次通過するとき、それぞれ、ブレーキON、ブレーキOFF、操舵開始、保舵開始、保舵終了、アクセルON、操舵終了のドライバ操作変化情報が作成されたとする。このとき、地図情報記憶部6には、表1に示すように、ドライバ操作変化情報と、そのドライバ操作変化情報が作成された時点における車両の位置情報(緯度、経度、及び方位)との組み合わせが、地図情報として記憶される。
【0025】
【表1】

表1おいて、例えば、ブレーキONのドライバ操作変化情報に対応する位置情報は、車両の緯度43.9451552°、経度144.1061561°、車両方位80.2°というものである。
【0026】
3.操作特性変更システム1が地図情報に基づきゲインを変更する処理
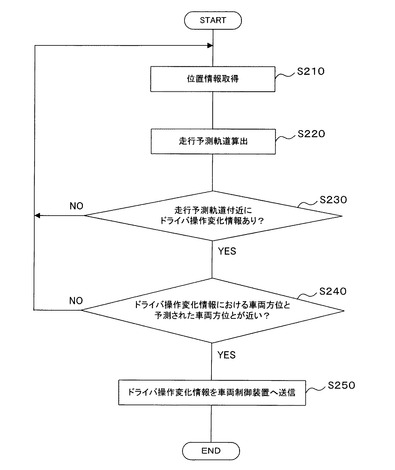
次に、図5〜図7を用いて、操作特性変更システム1が地図情報に基づきゲインを変更する処理を説明する。まず、図5のフローチャートを用いて、地図情報読込装置5が所定時間ごとに繰り返し実行する処理を説明する。
【0027】
ステップ210では、位置特定部8から、その時点での車両の位置情報を取得する。
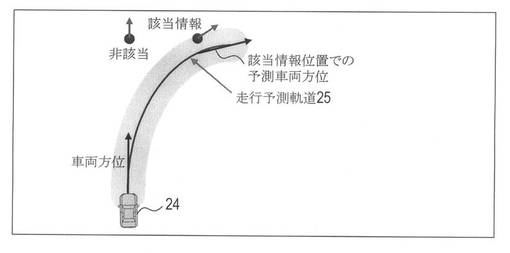
ステップ220では、その時点での車両の位置情報と、過去の位置情報など(進行方位、速度、加速度、ヨーレート、道路形状情報など)から、近い将来(ある一定の時間後まで、または一定の距離まで)車両24が走行することが予測される走行予測軌道25(図6参照)と、その走行予測軌道25の各位置における車両の予測方位とを算出する。
【0028】
ステップ230では、地図情報記憶部6に記憶された地図情報における位置情報(例えば緯度経度)を検索し、走行予測軌道25に対し、ある一定範囲内に位置する位置情報(以下、「該当情報」とする)があるか否かを判断する。YESの場合はステップ240に進み、NOの場合はステップ210に戻る。
【0029】
ステップ240では、該当情報に記憶された車両方位と、該当情報位置での予測車両方位との差が、所定の閾値以内であるか否かを判断する。YESの場合はステップ250に進み、NOの場合はステップ210に戻る。
【0030】
ステップ250では、該当情報に対応付けられたドライバ操作変化情報を車両制御装置9へ送信する。該当情報が複数ある場合は、それぞれに対応する複数のドライバ操作変化情報を送信する。このステップ250の後、処理を終了する。
【0031】
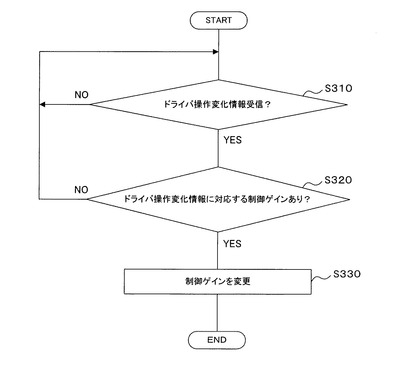
次に、図7のフローチャートを用いて、車両制御装置9が所定時間ごとに繰り返し実行する処理を説明する。
ステップ310では、ドライバ操作変化情報を地図情報読込装置5から受信したか否かを判断する。YESの場合はステップ320に進み、NOの場合はステップ310に留まる。
【0032】
ステップ320では、受信したドライバ操作変化情報に、対応する制御ゲイン変更があるか否かを判断する。表2に、ドライバ操作変化情報と、車両制御装置9における制御ゲイン変更との対応関係を示す。
【0033】
【表2】
対応する制御ゲイン変更がある場合はステップ330に進み、対応する制御ゲイン変更がない場合はステップ310に戻る。
【0034】
ステップ330では、受信したドライバ操作変化情報に応じて、制御ゲインを変更する。例えば、ドライバ操作変化情報として、アクセルONを受信した場合は、加速ゲインを増大させ、制動ゲインを減少させる。同様に、他のドライバ操作変化情報に対しても、表2で規定された制御ゲインの変更処理を行う。
【0035】
4.操作特性変更システム1及び地図情報作成装置3が奏する効果
(1)本実施例に係る操作特性変更システム1によれば、車両走行時のドライバ操作(ハンドル、アクセル、ブレーキ、シフトなどの操作)に変化があった際、その変化を表すドライバ操作変化情報と、その変化があったときにおける車両の位置情報とを関連付けて地図情報を作成し、その地図情報に基づいて車両の制御ゲインを変更することにより、ドライバの感覚に沿った車両制御等のアプリケーションを実現することができる。
【0036】
例えば、ドライバ操作の変化であるハンドルの操舵開始と、それを行ったときにおける位置情報とを地図情報として記憶させておき、次回以降その位置へ接近し、ドライバがハンドルを切ろうとした際に、ハンドルが切り易くなるようステアリング特性に関する操舵アシストゲインを変更する制御を実現することができる。
(2)本実施例に係る地図情報作成装置3が作成する地図情報は、車両制御等のアプリケーション側には依存しない(アプリケーション側を意識しない)形式でドライバ操作変化情報や位置情報を記憶する。よって、操作特性変更システム1に、地図情報を利用した新たなアプリケーションを追加する場合、また、操作特性変更システム1が備えるアプリケーションに変更があった場合にも、一度記憶した地図情報を変更する必要がない。すなわち、地図情報の拡張性・保守性において優れている。
(3)本実施例に係る地図情報作成装置3は、時系列的にドライバ操作情報を地図情報記憶部6へ記憶するのではなく、ドライバ操作に変化があった時のみ記憶を行うことにより、地図情報の記憶容量を小さくすることができる。
(4)本実施例に係る地図情報作成装置3は、新たに作成したドライバ操作変化情報を地図情報記憶部6に記憶しようとするとき、近傍に、同種のドライバ操作変化情報があるか否かを判断し、それがある場合は、位置情報を平均化し、その平均化した位置情報に関連づけて、ドライバ操作位置情報を記憶する(図3のフローチャートに示す処理)。そのことにより、狭い範囲内で複数のドライバ操作変化情報が作成された場合でも、平均化された位置情報に関連付けて、1のみのドライバ操作変化情報を記憶すればよいので、地図情報の記憶容量を一層小さくすることができる。
【0037】
尚、本発明は前記実施例になんら限定されるものではなく、本発明を逸脱しない範囲において種々の態様で実施しうることはいうまでもない。
例えば、新たに作成したドライバ操作変化情報を記憶しようとするとき、それに関連付ける位置情報は、位置特定部8から取得した位置情報をそのまま(位置情報を平均せずに)用いてもよい。この場合は、地図情報において、同種のドライバ操作変化情報が複数、近接して存在し得るようになる。このようにすることにより、地図情報を作成する処理を単純化し、結果として、処理速度を向上させ、また、処理を実現するプログラムを簡潔化することができる。
【図面の簡単な説明】
【0038】
【図1】操作特性変更システム1の構成を表すブロック図である。
【図2】地図情報作成装置3が実行する処理を表すフローチャートである。
【図3】地図情報作成装置3が実行する処理を表すフローチャートである。
【図4】車両におけるドライバ操作の例を表す説明図である。
【図5】地図情報読込装置5が実行する処理を表すフローチャートである。
【図6】地図情報読込装置5が算出した走行予測軌道を表す説明図である。
【図7】車両制御装置9が実行する処理を表すフローチャートである。
【符号の説明】
【0039】
1・・・操作特性変更システム、3・・・地図情報作成装置、5・・・地図情報読込装置、6・・・地図情報記憶部、7・・・ドライバ操作検出装置、8・・・位置特定部、9・・・車両制御装置、11・・・シフト、13・・・アクセル、15・・・ブレーキ、17・・・ハンドル、19・・・駆動力制御装置、21・・・制動制御装置、23・・・操舵制御装置、24・・・車両、25・・・走行予測軌道
【技術分野】
【0001】
本発明は、車両を運転するドライバのドライバ操作の変化と、そのドライバ操作の変化があったときにおける車両の位置情報とを関連づけて地図情報を作成する地図情報作成装置、及び地図情報に基づいて車両の操作特性を変更する車両の操作特性変更システムに関する。
【背景技術】
【0002】
ドライバの操作を学習し、その結果を様々に利用する技術が知られている。例えば、ドライバの操作を学習して車両制御用プログラムを作成し、それを特定地域毎に記憶し、車両制御に利用する技術が開示されている(特許文献1参照)。
また、GPS情報とブレーキ踏込圧やアクセル踏込圧等の運転操作データとを、時系列的にメモリカードに記憶し、その運転操作データを自動車の教習に利用する技術が開示されている(特許文献2参照)。
【特許文献1】特開平5−58200号公報
【特許文献2】特開平10−97179号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、特許文献1の技術は、車両制御に依存した車両制御用プログラムを作成するため、新たな車両制御を追加する場合や、車両制御に変更があった場合には、作成した車両制御プログラム全ての変更が必要となり、拡張性・保守性に乏しいという問題がある。
【0004】
また、特許文献2の技術は、運転操作データを単純に時系列的に記憶するものであるから、記憶データに冗長性があり、運転操作データの記憶容量が大きくなってしまうという問題がある。
【0005】
本発明は以上の点に鑑みなされたものであり、拡張性・保守性に優れ、記憶容量が小さい地図情報を作成できる地図情報作成装置、及び車両の操作特性変更システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)請求項1の発明に係る地図情報作成装置は、車両を運転するドライバのドライバ操作の変化と、そのドライバ操作の変化があったときの位置情報とを関連づけて地図情報を作成する。この地図情報は、例えば、車両制御等に利用することができるが、地図情報を利用する車両制御等のアプリケーション側には依存しない。よって、地図情報を利用する新たなアプリケーションを追加する場合や、アプリケーション側に変更がある場合にも、地図情報を変更する必要がない。すなわち、本発明の地図情報作成装置は、拡張性・保守性に優れた地図情報を作成することができる。
【0007】
また、本発明の地図情報作成装置は、ドライバ操作の変化を検出したときに、ドライバ操作の変化と、対応する位置情報とを記憶するので、例えば、所定時間ごとに自動的に記憶を行う場合と比べて、地図情報の記憶容量を小さくすることができる。
(2)請求項2の発明に係る地図情報作成装置は、同種の前記ドライバ操作の変化が複数あり、それらに対応する複数の位置情報が所定範囲内にあるときは、同種のドライバ操作の変化に関連づける位置情報を、複数の位置情報を平均化した平均位置情報とする。
【0008】
このことにより、記憶容量の低減や、地図情報の簡素化による利用性の向上を図ることができる。
(3)請求項3の発明に係る地図情報作成装置では、位置情報に、車両の方位が含まれる。そのため、例えば、2つの位置情報が、車両の緯度、経度は同じであり、車両の方位のみが異なる場合でも、それら2つの位置情報を、異なるものとして認識することができる。
(4)請求項4の発明に係る車両の操作特性変更システムは、地図情報作成装置で作成した地図情報に基づき、操作特性変更手段により、車両の操作特性を変更することができる。この地図情報は、操作特性変更手段には依存しないので、操作特性変更手段に新たなアプリケーションを追加する場合や、操作特性変更手段に変更がある場合にも、地図情報を変更する必要がない。すなわち、本発明に係る車両の操作特性変更システムは、拡張性・保守性に優れている。
【0009】
また、本発明における地図情報は情報量が小さいので、地図情報を記憶する記憶容量を小さくすることができ、地図情報の読み込み処理を簡素化することができる。
【発明を実施するための最良の形態】
【0010】
本発明を実施例に基づいて説明する。
【実施例】
【0011】
1.操作特性変更システム1の構成
本発明の地図情報作成装置を適用した操作特性変更システム1の構成を図1に基づいて説明する。
【0012】
操作特性変更システム1は、地図情報作成装置3、地図情報読込装置5、ドライバ操作検出装置7、及び車両制御装置9から構成される。
地図情報作成装置3は、地図情報作成部4、地図情報記憶部6、及び位置特定部8から構成される。地図情報作成部4は、ドライバ操作検出装置7から、後述するドライバ操作情報を受信し、そのドライバ操作情報と、位置特定部8から取得した、ドライバ操作情報を受信したときにおける車両の位置情報とに基づき、地図情報を作成し、地図情報記憶部6に記憶する。なお、位置特定部8は、GPSにより車両の位置及び方位を取得する。
【0013】
地図情報読込装置5は、地図情報作成装置3から、所定の地図情報を読み出し、車両制御装置9に出力する。
ドライバ操作検出装置7は、ドライバ操作情報を検出し、検出したドライバ操作情報を、地図情報作成装置3と、車両制御装置9とに、それぞれ出力する。ドライバ操作情報としては、シフト11の操作情報、アクセル13の操作情報、ブレーキ15の操作情報、及びハンドル17の操作情報がある。
【0014】
車両制御装置9は、駆動力制御装置19、制動制御装置21、及び操舵制御装置23から構成され、それぞれ、ドライバ操作検出装置7から受信したドライバ操作情報に基づき、車両の駆動力、車両の制動、車両の操舵を制御する。例えば、アクセル操作のドライバ操作情報を受信したとき、駆動力制御装置19は、所定の加速ゲインを用いて加速を行う。また、ブレーキ操作のドライバ操作情報を受信したとき、制動制御装置21は、所定の制動ゲインを用いて制動を行う。また、ハンドル操作のドライバ操作情報を受信したとき、操舵制御装置23は、所定の操舵アシストゲインを用いて操舵アシストを行う。
【0015】
また、車両制御装置9は、地図情報読込装置5から受信した地図情報に基づき、制御に用いるゲイン(加速ゲイン、制動ゲイン、操舵アシストゲイン)を変更する。なお、このゲイン変更の処理については後に詳述する。
【0016】
2.地図情報作成装置3が実行する処理
地図情報作成装置3が実行する処理を、図2及び図3のフローチャートに基づいて説明する。
【0017】
図2のステップ10では、ドライバ操作検出装置7が出力するドライバ操作情報を取得する。
ステップ20では、ドライバ操作情報に所定の変化があったか否かを判断する。ドライバ操作情報の変化としては、アクセルON、アクセルOFF、ブレーキON、ブレーキOFF、操舵開始、操舵終了、保舵開始、保舵終了などがある。ここで、操舵開始とは、ハンドルがニュートラルの状態から、左右どちらかに操作され、その操作量が所定の閾値を越えることをいう。操舵終了とは、操舵開始の後、ハンドルをニュートラルの状態に戻し、ハンドルの操作量が、所定の閾値を下回ることをいう。保舵開始とは、ハンドルが左右どちらかに操作された状態において、ハンドルの単位時間あたりの操作量が、所定の閾値を下回ることをいう。保舵終了とは、保舵開始の後、ハンドルの単位時間あたりの操作量が所定の閾値を越えることをいう。ドライバ操作情報に変化があった場合はステップ30に進み、ドライバ操作情報に変化がなかった場合はステップ10に戻る。
【0018】
ステップ30では、ドライバ操作変化情報を作成する。ドライバ操作変化情報とは、前記ステップ20で検出したドライバ操作情報の変化を表す情報である。
ステップ40では、その時点における車両の位置情報(車両の緯度、経度、方位)を位置特定部8から取得する。
【0019】
ステップ50では、前記ステップ30で作成したドライバ操作変化情報と、そのドライバ操作変化情報に対応する位置情報とを関連づけて地図情報を作成し、この地図情報を地図情報記憶部6に記憶する。
【0020】
次に、前記ステップ50にて地図情報を作成し、地図情報記憶部6に記憶する方法を、図3のフローチャートに基づいてさらに詳細に説明する。
ステップ110では、地図情報記憶部6に既に記憶されているドライバ操作変化情報を検索する。
【0021】
ステップ120では、新たに記憶しようとするドライバ操作変化情報に対応する位置情報(前記ステップ40にて取得した位置情報)と、地図情報記憶部6に既に記憶されているドライバ操作変化情報に対応する位置情報とが、所定の範囲内であるか否かを判断する。所定の範囲内である場合はステップ130に進み、範囲外である場合はステップ150に進む。なお、位置情報が所定の範囲内であるとは、緯度、経度、車両方位の全てが、所定の範囲内であることをいう。
【0022】
ステップ130では、前記ステップ120にて、位置情報が所定範囲内であると判断したドライバ操作変化情報が、同一種であるか否かを判断する。同一種である場合はステップ140に進み、同一種でない場合は、ステップ150に進む。なお、ドライバ操作変化情報が同一種とは、ドライバが操作する対象(アクセル、ブレーキ、ハンドル、シフト)が同一であるだけではなく、操作における変化の種類まで同一であることをいう。例えば、ブレーキON同士は同一種であるが、ブレーキONとブレーキOFFとは同一種ではない。
【0023】
ステップ140では、新たに作成したドライバ操作変化情報の位置情報と、既に記憶されたドライバ操作変化情報の位置情報との、平均化された位置情報を算出する。例えば、ある種のドライバ操作変化情報が既に1回記憶され、その位置情報の経度がX1、緯度がY1であったとする。そして、新たに作成された、同一種のドライバ操作変化情報の位置情報における経度がX2、緯度がY2であったとする。この場合、既に記憶されたドライバ操作変化情報の位置情報と、新たに作成したドライバ操作変化情報の位置情報との、平均化された位置情報の経度Xav、緯度Yavを、次の式により算出する。
(式1)Xav=X1+(X2−X1)/2
(式2)Yav=Y1+(Y2−Y1)/2
また、ある種のドライバ操作変化情報が、所定範囲内で既にn−1回記憶され、それらの平均位置情報の経度がXn-1、緯度がYn-1であったとする。そして、新たに作成された、同一種のドライバ操作変化情報の位置情報における経度がXn、緯度がYnであったとする。この場合、既に記憶されたドライバ操作変化情報の位置情報と、新たに作成したドライバ操作変化情報の位置情報との、平均化された位置情報の経度Xav、緯度Yavを、次の式により算出する。なお、nは2以上の整数である。
(式3)Xav=Xn-1+(Xn−Xn-1)/n
(式4)Yav=Yn-1+(Yn−Yn-1)/n
ステップ150では、新たに記憶するドライバ操作変化情報と、それに対応する位置情報との組み合わせを、地図情報として地図情報記憶部6に記憶する。ここで、前記ステップ120又はステップ130にてNOと判断した場合は、前記ステップ40で取得した位置情報をそのまま記憶する。一方、前記ステップ140にて平均位置情報を算出した場合は、新たに記憶するドライバ操作変化情報の位置情報として、前記ステップ140にて算出した平均位置情報を用いる。なお、この場合、それまで記憶されていた位置情報は削除する。よって、同一種のドライバ操作変化情報は、所定範囲内で、1つのみ記憶される。
【0024】
図4及び表1に基づいて、車両の走行に応じて作成された地図情報の例を示す。
図4に示すように、車両24が地点A〜Gを順次通過するとき、それぞれ、ブレーキON、ブレーキOFF、操舵開始、保舵開始、保舵終了、アクセルON、操舵終了のドライバ操作変化情報が作成されたとする。このとき、地図情報記憶部6には、表1に示すように、ドライバ操作変化情報と、そのドライバ操作変化情報が作成された時点における車両の位置情報(緯度、経度、及び方位)との組み合わせが、地図情報として記憶される。
【0025】
【表1】
表1おいて、例えば、ブレーキONのドライバ操作変化情報に対応する位置情報は、車両の緯度43.9451552°、経度144.1061561°、車両方位80.2°というものである。
【0026】
3.操作特性変更システム1が地図情報に基づきゲインを変更する処理
次に、図5〜図7を用いて、操作特性変更システム1が地図情報に基づきゲインを変更する処理を説明する。まず、図5のフローチャートを用いて、地図情報読込装置5が所定時間ごとに繰り返し実行する処理を説明する。
【0027】
ステップ210では、位置特定部8から、その時点での車両の位置情報を取得する。
ステップ220では、その時点での車両の位置情報と、過去の位置情報など(進行方位、速度、加速度、ヨーレート、道路形状情報など)から、近い将来(ある一定の時間後まで、または一定の距離まで)車両24が走行することが予測される走行予測軌道25(図6参照)と、その走行予測軌道25の各位置における車両の予測方位とを算出する。
【0028】
ステップ230では、地図情報記憶部6に記憶された地図情報における位置情報(例えば緯度経度)を検索し、走行予測軌道25に対し、ある一定範囲内に位置する位置情報(以下、「該当情報」とする)があるか否かを判断する。YESの場合はステップ240に進み、NOの場合はステップ210に戻る。
【0029】
ステップ240では、該当情報に記憶された車両方位と、該当情報位置での予測車両方位との差が、所定の閾値以内であるか否かを判断する。YESの場合はステップ250に進み、NOの場合はステップ210に戻る。
【0030】
ステップ250では、該当情報に対応付けられたドライバ操作変化情報を車両制御装置9へ送信する。該当情報が複数ある場合は、それぞれに対応する複数のドライバ操作変化情報を送信する。このステップ250の後、処理を終了する。
【0031】
次に、図7のフローチャートを用いて、車両制御装置9が所定時間ごとに繰り返し実行する処理を説明する。
ステップ310では、ドライバ操作変化情報を地図情報読込装置5から受信したか否かを判断する。YESの場合はステップ320に進み、NOの場合はステップ310に留まる。
【0032】
ステップ320では、受信したドライバ操作変化情報に、対応する制御ゲイン変更があるか否かを判断する。表2に、ドライバ操作変化情報と、車両制御装置9における制御ゲイン変更との対応関係を示す。
【0033】
【表2】
対応する制御ゲイン変更がある場合はステップ330に進み、対応する制御ゲイン変更がない場合はステップ310に戻る。
【0034】
ステップ330では、受信したドライバ操作変化情報に応じて、制御ゲインを変更する。例えば、ドライバ操作変化情報として、アクセルONを受信した場合は、加速ゲインを増大させ、制動ゲインを減少させる。同様に、他のドライバ操作変化情報に対しても、表2で規定された制御ゲインの変更処理を行う。
【0035】
4.操作特性変更システム1及び地図情報作成装置3が奏する効果
(1)本実施例に係る操作特性変更システム1によれば、車両走行時のドライバ操作(ハンドル、アクセル、ブレーキ、シフトなどの操作)に変化があった際、その変化を表すドライバ操作変化情報と、その変化があったときにおける車両の位置情報とを関連付けて地図情報を作成し、その地図情報に基づいて車両の制御ゲインを変更することにより、ドライバの感覚に沿った車両制御等のアプリケーションを実現することができる。
【0036】
例えば、ドライバ操作の変化であるハンドルの操舵開始と、それを行ったときにおける位置情報とを地図情報として記憶させておき、次回以降その位置へ接近し、ドライバがハンドルを切ろうとした際に、ハンドルが切り易くなるようステアリング特性に関する操舵アシストゲインを変更する制御を実現することができる。
(2)本実施例に係る地図情報作成装置3が作成する地図情報は、車両制御等のアプリケーション側には依存しない(アプリケーション側を意識しない)形式でドライバ操作変化情報や位置情報を記憶する。よって、操作特性変更システム1に、地図情報を利用した新たなアプリケーションを追加する場合、また、操作特性変更システム1が備えるアプリケーションに変更があった場合にも、一度記憶した地図情報を変更する必要がない。すなわち、地図情報の拡張性・保守性において優れている。
(3)本実施例に係る地図情報作成装置3は、時系列的にドライバ操作情報を地図情報記憶部6へ記憶するのではなく、ドライバ操作に変化があった時のみ記憶を行うことにより、地図情報の記憶容量を小さくすることができる。
(4)本実施例に係る地図情報作成装置3は、新たに作成したドライバ操作変化情報を地図情報記憶部6に記憶しようとするとき、近傍に、同種のドライバ操作変化情報があるか否かを判断し、それがある場合は、位置情報を平均化し、その平均化した位置情報に関連づけて、ドライバ操作位置情報を記憶する(図3のフローチャートに示す処理)。そのことにより、狭い範囲内で複数のドライバ操作変化情報が作成された場合でも、平均化された位置情報に関連付けて、1のみのドライバ操作変化情報を記憶すればよいので、地図情報の記憶容量を一層小さくすることができる。
【0037】
尚、本発明は前記実施例になんら限定されるものではなく、本発明を逸脱しない範囲において種々の態様で実施しうることはいうまでもない。
例えば、新たに作成したドライバ操作変化情報を記憶しようとするとき、それに関連付ける位置情報は、位置特定部8から取得した位置情報をそのまま(位置情報を平均せずに)用いてもよい。この場合は、地図情報において、同種のドライバ操作変化情報が複数、近接して存在し得るようになる。このようにすることにより、地図情報を作成する処理を単純化し、結果として、処理速度を向上させ、また、処理を実現するプログラムを簡潔化することができる。
【図面の簡単な説明】
【0038】
【図1】操作特性変更システム1の構成を表すブロック図である。
【図2】地図情報作成装置3が実行する処理を表すフローチャートである。
【図3】地図情報作成装置3が実行する処理を表すフローチャートである。
【図4】車両におけるドライバ操作の例を表す説明図である。
【図5】地図情報読込装置5が実行する処理を表すフローチャートである。
【図6】地図情報読込装置5が算出した走行予測軌道を表す説明図である。
【図7】車両制御装置9が実行する処理を表すフローチャートである。
【符号の説明】
【0039】
1・・・操作特性変更システム、3・・・地図情報作成装置、5・・・地図情報読込装置、6・・・地図情報記憶部、7・・・ドライバ操作検出装置、8・・・位置特定部、9・・・車両制御装置、11・・・シフト、13・・・アクセル、15・・・ブレーキ、17・・・ハンドル、19・・・駆動力制御装置、21・・・制動制御装置、23・・・操舵制御装置、24・・・車両、25・・・走行予測軌道
【特許請求の範囲】
【請求項1】
車両を運転するドライバのドライバ操作の変化を検出するドライバ操作変化検出手段と、
前記ドライバ操作変化検出手段が前記ドライバ操作の変化を検出したとき、前記車両の位置情報を取得する位置情報取得手段と、
前記ドライバ操作の変化と、そのドライバ操作の変化があったときの前記位置情報とを関連づけて地図情報を作成する地図情報作成手段と、
を備えることを特徴とする地図情報作成装置。
【請求項2】
前記地図情報作成手段は、同種の前記ドライバ操作の変化が複数あり、それらに対応する複数の前記位置情報が所定範囲内にあるときは、前記同種のドライバ操作の変化に関連づける位置情報を、前記複数の位置情報を平均化した平均位置情報とすることを特徴とする請求項1記載の地図情報作成装置。
【請求項3】
前記位置情報には、前記車両の方位が含まれることを特徴とする請求項1又は2記載の地図情報作成装置。
【請求項4】
請求項1〜3のいずれかに記載の地図情報作成装置を備えるとともに、
前記地図情報作成装置から前記地図情報を読み出す読出手段と、
前記地図情報に基づいて、前記車両の操作特性を変更する操作特性変更手段と、
を備えることを特徴とする車両の操作特性変更システム。
【請求項1】
車両を運転するドライバのドライバ操作の変化を検出するドライバ操作変化検出手段と、
前記ドライバ操作変化検出手段が前記ドライバ操作の変化を検出したとき、前記車両の位置情報を取得する位置情報取得手段と、
前記ドライバ操作の変化と、そのドライバ操作の変化があったときの前記位置情報とを関連づけて地図情報を作成する地図情報作成手段と、
を備えることを特徴とする地図情報作成装置。
【請求項2】
前記地図情報作成手段は、同種の前記ドライバ操作の変化が複数あり、それらに対応する複数の前記位置情報が所定範囲内にあるときは、前記同種のドライバ操作の変化に関連づける位置情報を、前記複数の位置情報を平均化した平均位置情報とすることを特徴とする請求項1記載の地図情報作成装置。
【請求項3】
前記位置情報には、前記車両の方位が含まれることを特徴とする請求項1又は2記載の地図情報作成装置。
【請求項4】
請求項1〜3のいずれかに記載の地図情報作成装置を備えるとともに、
前記地図情報作成装置から前記地図情報を読み出す読出手段と、
前記地図情報に基づいて、前記車両の操作特性を変更する操作特性変更手段と、
を備えることを特徴とする車両の操作特性変更システム。
【図1】

【図2】
【図3】
【図5】
【図7】
【図4】
【図6】
【図2】
【図3】
【図5】
【図7】
【図4】
【図6】
【公開番号】特開2009−103570(P2009−103570A)
【公開日】平成21年5月14日(2009.5.14)
【国際特許分類】
【出願番号】特願2007−275302(P2007−275302)
【出願日】平成19年10月23日(2007.10.23)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成21年5月14日(2009.5.14)
【国際特許分類】
【出願日】平成19年10月23日(2007.10.23)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]