
地図情報処理装置
【課題】 実際の道路状況に即した経路探索や経路案内を可能にする地図情報処理装置を提供する。
【解決手段】 道路情報を含む地図情報を記憶する地図情報記憶手段16aと、位置検出手段15で検出された自己の位置に対応する道路が地図情報に含まれる道路情報中に存在しない新規道路を検出する新規道路検出手段19と、検出された新規道路と地図情報に含まれている道路または新規道路検出手段で過去に検出された道路とが該新規道路の始終点以外で交差する交差地点を判定する交差判定手段20と、新規道路情報および交差判定手段で判定された交差地点を表す交差情報に基づき、新規道路情報および地図情報に含まれる道路情報を更新するための情報を含む道路更新情報を生成する道路更新情報生成手段21と、道路更新情報に基づき、地図情報に含まれる道路情報を更新し、且つ新規道路情報記憶手段16bに新規道路情報を書き込む道路情報更新手段24を備えている。
【解決手段】 道路情報を含む地図情報を記憶する地図情報記憶手段16aと、位置検出手段15で検出された自己の位置に対応する道路が地図情報に含まれる道路情報中に存在しない新規道路を検出する新規道路検出手段19と、検出された新規道路と地図情報に含まれている道路または新規道路検出手段で過去に検出された道路とが該新規道路の始終点以外で交差する交差地点を判定する交差判定手段20と、新規道路情報および交差判定手段で判定された交差地点を表す交差情報に基づき、新規道路情報および地図情報に含まれる道路情報を更新するための情報を含む道路更新情報を生成する道路更新情報生成手段21と、道路更新情報に基づき、地図情報に含まれる道路情報を更新し、且つ新規道路情報記憶手段16bに新規道路情報を書き込む道路情報更新手段24を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、地図情報処理装置に関し、特に新規道路を検出して地図情報に組み込む技術に関する。
【背景技術】
【0002】
従来、車両に搭載されるナビゲーション装置が知られている。このナビゲーション装置では、地図情報処理装置は、予め記憶された地図情報に基づいて表示装置に地図を表示させる。運転者は、この表示装置に表示された地図を見ることにより自車両の位置を確認しながら運転を行うことができるので、道に迷うことなく、目的地に確実且つ短時間で到着できる。
【0003】
ところで、このようなナビゲーション装置としては、自己が保有している地図情報に存在しない道路を走行した際に、走行履歴から新規道路を検出し、保有している地図情報に追加するナビゲーション装置が知られている(例えば、特許文献1参照)。このナビゲーション装置は、車両の走行軌跡に基づいて、地図情報に含まれない新たな道路を検出したときに、この道路に対応する走行軌跡を含む更新情報を作成して既存道路情報に追加するとともに、検出された道路の始終点を既存の地図情報に接続する。
【0004】
【特許文献1】特開2002−243469号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところが、上述した特許文献1に記載された技術では、新しく検出された道路の始終点における既存の道路との接続は可能であるが、始終点以外の地点における他の道路との交差については対応がなされておらず、新しく検出された道路の始終点以外の地点における他道路との交差点の情報を含む地図情報に更新できない。したがって、実際の道路状況に即した経路探索や経路案内をできないという問題がある。
【0006】
この発明は、上述した問題を解消するためになされたものであり、実際の道路状況に即した経路探索や経路案内を可能にする地図情報処理装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
この発明に係る地図情報処理装置は、自己の位置を検出する位置検出手段と、道路情報を含む地図情報を記憶する地図情報記憶手段と、地図情報記憶手段から地図情報を取得する地図情報取得手段と、位置検出手段によって検出された自己の位置に対応する道路が地図情報取得手段で取得された地図情報に含まれる道路情報中に存在しない新規道路を検出する新規道路検出手段と、新規道路情報を記憶する新規道路情報記憶手段と、新規道路検出手段で検出された新規道路と地図情報取得手段で取得された地図情報に含まれている道路または新規道路検出手段によって過去に検出された道路とが該新規道路の始終点以外で交差する交差地点を判定する交差判定手段と、新規道路検出手段で検出された新規道路を表す新規道路情報を生成するとともに、前記新規道路情報記憶手段に記憶されている新規道路情報および地図情報記憶手段に記憶されている地図情報に含まれる道路情報を更新するための情報を含む道路更新情報を生成する道路更新情報生成手段と、道路更新情報生成手段で生成された道路更新情報に基づき、地図情報記憶手段に記憶されている地図情報に含まれる道路情報および新規道路情報記憶手段に記憶されている新規道路情報に含まれる道路情報を更新し、且つ新規道路情報記憶手段に新規道路情報を書き込む道路情報更新手段とを備えているものである。
【発明の効果】
【0008】
この発明によれば、新規に検出された道路の始終点以外の地点における交差点の情報を利用することができるので、実際の道路状況に即した経路探索や経路案内を可能にする地図情報処理装置を提供できる。
【発明を実施するための最良の形態】
【0009】
以下、この発明の実施の形態を、図面を参照しながら詳細に説明する。なお、以下の各実施の形態において、同一または相当する構成部分には同一の符号を付して説明する。
実施の形態1.
図1は、この発明の実施の形態1に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、カーナビゲーション装置と、これに接続された表示装置40、音声出力装置41、入力装置42、車速センサ43、角速度センサ44およびGPS(Global Positioning System)受信アンテナ45から構成されている。
【0010】
カーナビゲーション装置は、表示地図計算手段10、経路計算手段11、表示制御手段12、音声出力制御手段13、入力受信手段14、測位手段15、HDD(Hard Disk Drive)16、HDDアクセス手段17、一時記憶メモリ18、新規道路検出手段19、交差判定手段20、道路更新情報生成手段21、交差点問合せ手段22、交差点決定手段23、道路情報更新手段24および制御手段25から構成されている。
【0011】
表示地図計算手段10は、地図情報および新規道路情報から表示用の地図画像を計算する。経路計算手段11は、任意の2点間の推奨経路を計算する。表示制御手段12は、表示地図計算手段10によって計算された表示用の地図画像や経路計算手段11によって計算した推奨経路を表示装置40が表示可能な形式に変換し表示装置40に送る。音声出力制御手段13は、経路計算手段11によって計算された推奨経路に従って目的地までの案内を行う音声情報や、地図情報に含まれている情報を運転者に知らせるための音声情報を音声出力装置41が出力可能な形式に変換し音声出力装置41に送る。入力受信手段14は、外部の入力装置42からの入力信号を受信する。
【0012】
測位手段15は、この発明の位置検出手段に対応する。この測位手段15は、車速センサ43、角速度センサ44およびGPS受信アンテナ45からの信号に基づいて、自己(当該地図情報処理装置が搭載された車両をいう。以下においても同じ)の現在位置を決定するとともに、決定した現在位置とHDD16に記憶されている道路情報を照合し、自己の現在位置が道路情報で表されている何れの道路の何れの位置に該当するかを算出する。測位手段15は、表示地図計算手段10において自己の周囲の地図を表示するための計算が行われる際や、経路計算手段11において自己の現在位置から入力地点への推奨経路が計算される際には、測位結果を表示地図計算手段10や経路計算手段11に送る。
【0013】
HDD16は、この発明の地図情報記憶手段および新規道路情報記憶手段に対応する。このHDD16は、地図情報を記憶する地図情報記憶手段16aと新規道路情報を記憶する新規道路情報記憶手段16bとを備えている。地図情報記憶手段16aには、当該地図情報処理装置の出荷時に、道路情報を含む地図情報が記憶されている。地図情報は、緯度線および経度線に平行な線で網目状に分割された領域ごとに作成されている。この領域を「メッシュ」と呼ぶ。
【0014】
また、新規道路情報記憶手段16bは、出荷時に記憶された地図情報に存在しない道路を走行した際に、その道路を表す新規道路情報が追加される領域である。新規道路情報も、地図情報と同様に網目状に分割されており、メッシュ毎に新規道路情報が作成され、記憶される。HDDアクセス手段17は、HDD16にアクセスするための制御を行う。一時記憶メモリ18は、例えば揮発性メモリから構成されており、種々の情報を一時的に記憶するために使用される。
【0015】
新規道路検出手段19は、地図情報に存在しない新規道路を検出する。この新規道路検出手段19の詳細は後述する。交差判定手段20は、既存の道路と新規道路との交差の有無を判定する。この交差判定手段20の詳細は後述する。道路更新情報生成手段21は、地図情報を更新するための道路更新情報を生成する。この道路更新情報生成手段21の詳細は後述する。
【0016】
交差点問合せ手段22は、道路更新情報生成手段21によって仮交差点(詳細は後述する)として生成された地点が通常の平面交差点であるのか立体交差点であるのかをユーザに問い合わせる。この交差点問合せ手段22の詳細は後述する。交差点決定手段23は、経路計算手段11によって算出された推奨経路が仮交差点における右左折を含む場合に、問い合わせの画面を表示してユーザに提示し、仮交差点の状態をユーザに選択的に入力させる。この交差点決定手段23の詳細は後述する。
【0017】
道路情報更新手段24は、道路更新情報生成手段21によって生成された道路更新情報に基づき、HDD16の内部の地図情報および新規道路情報を更新する。この道路情報更新手段24の詳細は後述する。制御手段25は、予めプログラムされた手順に従い、表示地図計算手段10、経路計算手段11、表示制御手段12、音声出力制御手段13、入力受信手段14、測位手段15、HDDアクセス手段17を制御する。
【0018】
表示地図計算手段10、経路計算手段11、音声出力制御手段13および測位手段15は、HDD16に記憶されている地図情報や新規道路情報に含まれている道路(以下、「既存道路」という)の道路情報を使用してそれぞれの処理を実行する際には、その処理の過程において使用するメッシュに該当する地図領域の地図情報や新規道路情報をHDDアクセス手段17によってHDD16から読み出し、読み出した情報を一時記憶メモリ18に保存して使用する。
【0019】
カーナビゲーション装置に接続される表示装置40は、表示制御手段12から送られてくる表示用の地図画像や推奨経路の情報に基づき表示を行う。音声出力装置41は、推奨経路に従って目的地までの案内を行う音声や、地図情報に含まれている情報を音声で出力する。入力装置42は、表示装置40に表示したい地図領域や、推奨経路の計算を行いたい始点や終点を入力する。この入力装置42は、例えばカーナビゲーション装置の前面に配される本体パネルに設置された入力ボタン、入力ボタンと同等の入力信号を発信するリモートコントローラ(リモコン)、表示装置40の画面上に設定されたタッチパネル、音声操作を行うための音声入力用マイクロホン、または、これらの組合せによって構成できる。
【0020】
車速センサ43は、この発明の速度検出手段に対応し、自己が移動する速度を検出する。この車速センサ43で検出された速度は、測位手段15に送られる。角速度センサ44は、自己の方向変化を検出する。この角速度センサ44で検出された方向変化は、測位手段15に送られる。GPS受信アンテナ45は、GPS衛星から送られてくる電波を受信する。このGPS受信アンテナ45で電波を受信することにより得られたGPS信号は、測位手段15に送られる。
【0021】
次に、上記のように構成される、この発明の実施の形態1に係る地図情報処理装置の動作を説明する。
【0022】
以下では、新規道路検出手段19、交差判定手段20、道路更新情報生成手段21、道路情報更新手段24によってHDD16に地図情報としても新規道路情報としても未だ保存されていない道路情報を生成し、追加する動作を説明する。
【0023】
図2は、地図情報処理装置の測位に関するメイン処理を示すフローチャートである。このメイン処理では、まず、開始処理が実行される(ステップST10)。この開始処理では、前回終了時の状態に復元する初期化処理などが行われる。この開始処理が終了すると、次いで、測位手段15によって現在位置が検出される(ステップST11)。そして、このステップST11で検出された現在位置が、既存道路上に位置しているかどうかが調べられる(ステップST12)。ここで、現在位置が既存道路上に位置していないことが判断されると、新規道路検出処理が行われる(ステップST15)。この新規道路検出処理については後述する。その後、シーケンスはステップST16に進む。
【0024】
上記ステップST12で、現在位置が既存道路上に位置していることが判断されると、前回の測位結果が一時記憶メモリ18から削除される(ステップST13)。そして、最新の測位によって得られた現在位置が一時記憶メモリ18に記憶される(ステップST14)。次いで、メイン処理の終了指示がなされたかどうかが調べられる(ステップST16)。ここで、メイン処理の終了指示がなされていないことが判断されると、シーケンスはステップST11に戻り、上述した処理が繰り返される。一方、ステップST16において、終了指示がなされたことが判断されると、終了処理が実行される(ステップST17)。これにより、地図情報処理装置の測位に関するメイン処理は終了する。
【0025】
次に、図2のステップST15において、新規道路検出手段19によって行われる新規道路検出処理の詳細を、図3に示すフローチャートを参照しながら説明する。
【0026】
新規道路検出処理では、まず、逸脱情報が一時記憶メモリ18に一時記憶される(ステップST20)。逸脱情報は、既存道路から逸脱した時点における既存道路および位置を表す情報から構成されている(詳細は後述する)。次いで、測位手段15によって現在位置が検出される(ステップST21)。次いで、ステップST21で検出された現在位置が既存道路上に位置しているかどうかが調べられる(ステップST22)。
【0027】
このステップST22で、現在位置が既存道路上に位置していないことが判断されると、新規道路を走行中であることが認識され、次いで、走行履歴時系列データ判定条件を満たしているかどうかが調べられる(ステップST23)。ここで、走行履歴時系列データ判定条件とは、測位手段15から得られる現在位置のうち走行履歴として格納すべき現在位置を規定する条件である(詳細は後述する)。
【0028】
上記ステップST23で、走行履歴時系列データ判定条件を満たしていることが判断されると、現在位置が走行履歴として一時記憶メモリ18に一時記憶される(ステップST24)。その後、シーケンスはステップST21に戻る。一方、上記ステップST23で、走行履歴時系列データ判定条件を満たしていないことが判断されると、現在位置が走行履歴として一時記憶メモリ18に一時記憶されずに、シーケンスはステップST21に戻る。以下、ステップST22〜ST24の処理が繰り返し実行される。
【0029】
上記ステップST22〜ST24の処理の繰り返し実行の途中で、ステップST22において、現在位置が既存道路上に存在していることが判断されると、新規道路を走行中であった車両が既存道路に合流したことが認識され、合流情報が一時記憶メモリ18に一時記憶される(ステップST25)。ここで、合流情報は、新規道路から既存道路に合流した時点における既存道路および位置を表す情報から構成されている。以上の処理により、新規道路検出処理は終了する。
【0030】
上述した新規道路検出処理が終了すると、次いで、図4のフローチャートに示すように、交差判定処理(ステップST30)、道路更新情報生成処理(ステップST31)および道路情報更新処理(ステップST32)が順次実行される。以下、これらの各処理を詳細に説明する。
【0031】
まず、図4のステップST30において、交差判定手段20によって行われる交差判定処理を、図5に示すフローチャートを参照しながら説明する。
【0032】
交差判定処理が開始されると、まず、新規道路が複数の線分に分割される(ステップST40)。次いで、分割された全線分についての交差判定が完了したかどうかが調べられる(ステップST41)。ここで、交差判定が完了したことが判断されると、交差判定処理は終了する。上記ステップST41において、分割された全線分についての交差判定が完了していないことが判断されると、次いで、未判定線分の中から1つが選択される(ステップST42)。次いで、選択された線分の近傍の既存道路が、当該新規道路が含まれるメッシュに該当する地図情報および新規道路情報の中から抽出される(ステップST43)。次いで、抽出された線分の近傍の全道路について、当該線分との交差判定が完了したかどうかが調べられる(ステップST44)。ここで、交差判定が完了したことが判断されると、シーケンスはステップST41に戻り、再度、未判定線分の有無の確認が行われる。
【0033】
上記ステップST44において、交差判定が完了していないことが判断されると、次いで、未判定の近傍道路から1つの道路が選択される(ステップST45)。次いで、選択された線分と選択された近傍道路の位置関係が計算される(ステップST46)。次いで、ステップST46で得られた計算結果に基づいて、選択された線分と選択された近傍道路とが交差しているかどうかが調べられる(ステップST47)。ここで、交差していないことが判断されると、シーケンスはステップST44に戻り、再度、交差判定が完了していない近傍道路の有無の確認が行われる。
【0034】
上記ステップST47において、交差していることが判断されると、交差地点座標と近傍道路を特定する情報とが交差情報として一時記憶メモリ18に一時記憶される(ステップST48)。その後、シーケンスはステップST41に戻り、上述した処理が繰り返される。以上により、交差判定処理は終了する。
【0035】
次に、図4のステップST31において、道路更新情報生成手段21によって行われる道路更新情報生成処理を、図6に示すフローチャートを参照しながら説明する。
【0036】
道路更新情報生成処理では、まず、一時記憶メモリ18から逸脱情報が読み込まれる(ステップST50)。次いで、一時記憶メモリ18から合流情報が読み込まれる(ステップST51)。次いで、一時記憶メモリ18から走行履歴が読み込まれる(ステップST52)。次いで、一時記憶メモリ18に交差情報が記憶されているかどうかが調べられる(ステップST53)。ここで、交差情報が記憶されていることが判断されると、その交差情報が一時記憶メモリ18から読み出される(ステップST54)。一方、交差情報が記憶されていないことが判断されると、ステップST54の処理はスキップされる。
【0037】
次いで、ステップST50〜ST54の処理により読み出された逸脱情報、合流情報、走行履歴および交差情報に基づき新規道路情報が生成される(ステップST55)。次いで、地図情報を更新する必要があるどうかが調べられる(ステップST56)。ここで、必要があることが判断された場合は、地図情報を更新するための道路更新情報が交差情報に基づいて生成される(ステップST57)。ステップST56で、地図情報を更新する必要がないことが判断されると、ステップST57の処理はスキップされる。以上により、道路更新情報生成処理は終了する。
【0038】
次に、図4のステップST32において、道路情報更新手段24によって行われる道路情報更新処理を、図7に示すフローチャートを参照しながら説明する。
【0039】
道路情報更新処理では、まず、当該新規道路の位置するメッシュに該当する新規道路情報がHDD16に存在するかどうかが調べられる(ステップST60)。ここで、存在することが判断された場合は、新たに生成された新規道路情報が、HDD16に存在する当該メッシュの新規道路情報に追加される(ステップST61)。一方、HDD16に当該メッシュの新規道路情報が存在しない場合は、当該メッシュの新規道路情報としてHDDに保存する(ステップST62)。
【0040】
次に、HDD16に記憶されている当該メッシュに該当する地図情報を修正するための道路更新情報が生成されているかどうかが調べられる(ステップST63)。ここで、生成されていることが判断された場合は、当該道路更新情報に従って、地図情報が更新される(ステップST64)。一方、当該メッシュに該当する地図情報を更新するための道路更新情報が生成されていない場合は、ステップST64の処理はスキップされる。以上により、道路情報更新処理は終了する。
【0041】
次に、具体的な走行例を用いて、新規道路の検出、生成および追加の動作を説明する。図8は、あるメッシュに含まれる既存道路によって構成される道路情報の一部分を示しており、交差点を表すノード(丸印)と、交差点間の道路を表すリンク(丸印の間の線分)で道路が表現されている。これらノードとリンクとで道路のつながりを表現したものを道路ネットワークと呼ぶ。この道路ネットワークにおいて点線で示すように、リンクL1上を走行中、P1の地点においてL1から逸脱し、地点QにおいてリンクL2を横切り、地点P2においてリンクL3に合流し、リンクL3上を走行した場合を想定し、既存道路に含まれていない新規道路を追加する処理を説明する。
【0042】
リンクL1の走行中に、測位手段15は、車速センサ43、角速度センサ44およびGPS受信アンテナ45からの信号に基づいて、現在位置を計算し、また、HDD16に記憶されている地図情報に含まれる道路情報を参照し、リンクL1上を走行していることを認識している。そして、最新の測位結果を常に一時記憶メモリ18に記憶する。この時、前回の測位結果は削除される。この地図情報処理装置を搭載した車両がP1の地点においてリンクL1から逸脱したとき、測位手段15の測位結果に基づき、その旨が検出され、逸脱前の走行リンクと逸脱地点が逸脱情報として一時記憶メモリ18に記憶される。図8に示す例では、リンクL1と地点P2が一時記憶メモリ18に記憶される。
【0043】
次に、新規道路検出手段19における処理(図2における新規道路検出処理)について説明する。
【0044】
新規道路検出手段19は、逸脱が検出された後、再び既存道路上の走行に戻るまで、すなわち、既存道路への合流を検出するまでの走行軌跡を一時記憶メモリ18に記憶させる。図8に示す例では、地点P1から地点P2までの走行軌跡が一時記憶メモリ18に記憶される。走行軌跡は、例えば、測位手段15が測位した車両位置の時系列データである。時系列データを取得する最も簡単な方法としては、一定時間毎にデータを取得する方法が考えられる。通常、測位手段15は、定められた時間間隔で現在位置の測位を行う。したがって、一定時間毎に車両位置を取得する方法としては、n回(nは1以上の整数)に1回の割合で測位結果を一時記憶メモリ18に記憶する方法を採用できる。図9は、3回に1の割合で測位結果を記憶する例を示しており、この場合、9地点の測位結果が走行履歴として記憶される。
【0045】
しかし、上述した方法では、取得されるデータ数が増加し、一時記憶メモリ18を浪費するおそれがある。そこで、走行履歴時系列データ判定条件として、一定距離の走行毎の測位結果データを一時記憶メモリ18に記憶するという条件を追加し、取得されるデータ数を削減することが可能である。図10は、一定距離毎に測位結果を記憶する例を示しており、この場合、7地点の測位結果が走行履歴として記憶される。
【0046】
また、走行履歴時系列データ判定条件として、車両の進行方向が閾値を超えて変化したときに測位結果データを一時記憶メモリ18に記憶するという条件を使用することで、取得されるデータ数をより削減し、一時記憶メモリ18の浪費をさらに抑制することが可能になる。図11は、進行方向が変化する毎に測位結果を記憶する例を示しており、この場合、5地点の測位結果が走行履歴として記憶される。進行方向の変化は、角速度センサ44の検出結果を利用することで検出できる。また、前々回の測位結果と前回の測位結果とを結ぶ第1線分と、前回の測位結果と最新の測位結果を結ぶ第2線分とのなす角度を利用して検出することもできる。
【0047】
次に、新規道路検出手段19は、合流リンクと合流地点の情報を合流情報として一時記憶メモリ18に記憶させる。図8に示す例では、リンクL3と地点P2とが一時記憶メモリ18に記憶される。新規道路検出手段19によって以上の処理が完了すると、次に、交差判定手段20が、新規道路検出手段19によって検出された新規道路の逸脱および合流地点以外の地点におけると既存道路との交差の有無を判定する。交差の有無の判定は、新規道路の走行履歴として一時記憶メモリ18に記憶されている位置情報の時系列データを複数の線分に分割し、各線分と2次元的に交差する既存道路を検索することにより行われる。
【0048】
走行履歴を複数の線分に分割する方法としては、全ての時系列データを用いて分割する方法が最も簡単である。しかし、時系列データ点数が増加すると、それに比例して交差判定に要する計算時間も増加してしまう。そこで、時系列データを間引いて線分を分割することで、この問題を解決するように構成できる。また、交差判定において検索対象とする既存道路は、メッシュ内の既存道路とすることで交差判定を現実的な時間以内に完了することが可能になる。
【0049】
交差判定手段20は、新規道路検出手段19によって検出された新規道路と既存道路との交差地点を検出すると、当該地点が交差地点であることを一時記憶メモリ18に記憶する。図8に示す例では、地点P1から地点P2に至る新規道路上で、リンクL2と地点Qにおいて交差していることが一時記憶メモリ18に記憶される。
【0050】
次に、道路更新情報生成手段21は、一時記憶メモリ18に記憶されている新規道路の情報を、HDD16の内部に新規道路情報として保存する形式に変換する。
【0051】
また、図12は、図8に示した道路ネットワークに対して、地点P1から地点Qを通り地点P2に至る新規道路を追加した結果の道路ネットワークを示している。この図12からわかるように、新規道路を追加すると、図8に示す例では1本のリンクであったリンクL1、L2およびL3が、それぞれ地点P1、QおよびP2においてL1aとL1b、L2aとL2b、L3aとL3bという2本のリンクに分割されることになる。
【0052】
そこで、道路更新情報生成手段21は、既存道路のリンクにおいて、新規道路との交差点となりうる地点にノードを発生させ、リンクを分割するための情報も生成する。この道路更新情報生成手段21が生成する情報を「道路更新情報」と呼ぶ。
【0053】
この時、道路更新情報生成手段21は、新規道路の始終点以外であって既存道路と交差している地点に該当するノードを仮交差点であるとして道路更新情報を生成する。HDD16の地図情報記憶手段16aに記憶されている地図情報に含まれる道路情報や、新規道路情報記憶手段16bに記憶されている新規道路情報においては、ノードを表現するフィールド中に、仮交差点フラグとして1ビットを割当て、これを利用して当該ノードが仮交差点であるか否かを表現する。
【0054】
図8および図12に示す例では、道路更新情報生成手段21は、生成する新規道路情報の中の地点Qに該当するノードの仮交差点フラグをONにするとともに、既存道路のリンクL2を分割したL2a、L2bにおける地点Qに該当するノードの仮交差点フラグをONにした道路更新情報を生成する。
【0055】
また、道路更新情報生成手段21は、仮交差点における通行規制を、全ての方向に通行可として生成する。通行規制について、以下に説明する。カーナビゲーション装置が利用する道路情報には、通常、ノードにおける通行規制が記述されている。今、例えば図13(a)に示すように、ノード0にリンク1からリンク4までの4本のリンクが接続されており、リンク1はノード0に向かう方向の一方通行、リンク3からノード0に向かう場合はリンク4へ向かう左折のみ可能、という場合を想定する。このとき、ノード0における進入リンクと脱出リンクの組合せによって、その通行可否は、図13(b)に示すように表現できる。この通行可否を表す情報がノードに関連付けられた情報として、道路情報に記述される。これを通行規制と呼ぶ。
【0056】
次に、道路情報更新手段24は、道路更新情報生成手段21で生成された道路更新情報に含まれる新規道路情報を、HDDアクセス手段17を介してHDD16の内部の新規道路情報記憶手段16bに保存する。このとき、保存しようとするメッシュに対応する新規道路情報が既に存在している場合は、その新規道路情報に追加し、そのメッシュに対応する新規道路情報が存在しない場合には、そのメッシュに対応する新規道路情報として新たに保存する。また、道路情報更新手段24は、既存の道路ネットワークを更新するための情報が道路更新情報に含まれている場合は、その情報に従って既存の道路ネットワークを更新する。
【0057】
次に、道路更新情報生成手段21によって仮交差点として生成された地点が通常の平面交差点であるのか立体交差であるのかを、交差点問合せ手段22および交差点決定手段23で特定する動作について説明する。
【0058】
図14は、経路計算手段11によって算出された推奨経路に、仮交差点として登録されているノード(図14中に、新規交差点として二重丸によって表現されている)における右左折が含まれている場合の表示装置40への表示例である。この表示は交差点問合せ手段22によって実施される。この表示例では、画面は、推奨経路を提示する地図、推奨経路に仮交差点で右左折する地点が存在することを示すメッセージ、仮交差点の状態の入力をユーザに促す選択メニューおよび案内開始ボタンから構成されている。なお、画面の中に描かれている第2経路は、仮交差点(図14中の新規交差点)が立体交差等から構成されており、右左折することができないと仮定した場合の推奨経路を示すものである。
【0059】
なお、図14に示す表示画面の表示とともに、音声出力装置41から、仮交差点として登録されているノードにおける右左折が含まれる推奨経路が算出されたことを音声によってユーザに案内するように構成できる。この時、右左折する仮交差点がどのような位置にあり(住所や周辺の施設など)、どのような道路同士の交差であるか(道路番号、道路名称など)を伝えるように構成すれば、案内対象の仮交差点が、現実のどの交差地点を指し示しているかをユーザは、より正確に把握することができる。
【0060】
図14に示される表示や、上述した音声案内によって、仮交差点で右左折する経路を提示されたユーザは、案内対象の仮交差点の状態を選択する。図14に示す例では、ユーザは選択メニューに示されている「通常交差点」、「立体交差」、「不明」および「案内開始」のいずれかを選択する。この選択は、本体パネルに設置されたボタンを操作することにより選択メニューの所望の項目にフォーカスをあて、実行ボタンを押下することで実現できる。また、リモコンに設置されたボタンを操作することによっても実現できる。また、表示装置40にタッチパネル入力装置を備えれば、タッチパネル操作によっても実現できる。さらには、音声認識手段を備えれば、音声入力による操作によっても実現できる。
【0061】
図15は、経路計算手段11によって算出された推奨経路に、仮交差点として登録されているノードにおける右左折が含まれない場合の表示装置40への表示例である。この場合、通常の推奨経路の算出結果が表示される。図15に例示した推奨経路の算出結果の表示画面は、推奨経路を提示する地図と、推奨経路が求まったことを示すメッセージおよび案内開始ボタンから構成されている。
【0062】
本体パネルに備え付けられた操作ボタン、リモコン、タッチパネル、または、音声入力などによって案内開始ボタンを押下することにより、図15に示す表示画面から通常の地図表示画面に遷移し、目的地までの案内がユーザに提供される。
【0063】
図16は、図14に示した仮交差点の状態を選択する画面の提示後、交差点決定手段23によって仮交差点の状態が設定されるまでの交差点決定処理を示すフローチャートである。
【0064】
この交差点決定処理では、交差点問合せ手段22によって図14に示す画面が表示された後、ユーザによる選択待ちに入る(ステップST70)。次いで、選択メニューの何れかの項目が選択されたかどうかが調べられる(ステップST71)。ここで、何れも選択されていないことが判断されると、シーケンスはステップST70に戻り、再び、ユーザによる選択待ちに入る。
【0065】
ステップST71で、選択メニューの何れかの項目が選択されたことが判断されると、次いで、「案内開始」が選択されたかどうかが調べられる(ステップST72)。ここで、案内開始が選択されたことが判断されると、交差点決定処理は終了する。一方、案内開始が選択されていないことが判断されると、次いで、「立体交差」が選択されたかどうかが調べられる(ステップST73)。ここで、立体交差が選択されたことが判断されると、HDD16に記憶されている当該仮交差点における通行規制が、右左折の全組合せ(直進を除く)についてOKからNGに変更される(ステップST74)。次いで、HDD16に記憶されている当該仮交差点における仮交差点フラグがOFFに変更される(ステップST75)。
【0066】
上記ステップST73で、立体交差が選択されていないことが判断されると、次いで、「通常交差点」が選択されたかどうかが調べられる(ステップST76)。ここで、通常交差点が選択されたことが判断されると、シーケンスはステップST75に移り、上述した処理が実行される。一方、通常交差点が選択されていない、つまり「不明」が選択されたことが判断されると、シーケンスはステップST77に移る。この場合、仮交差点は、そのまま残される。
【0067】
ステップST77では、経路計算手段11によって算出された推奨経路上で、右左折する仮交差点についてユーザによる選択が完了したかどうかが調べられる。ここで、ユーザによる選択が完了していない、つまり推奨経路上で右左折する仮交差点が未だ存在することが判断されると、次の右左折する仮交差点における選択メニューが表示される(ステップST78)。その後、シーケンスはステップST70に戻り、再び、ユーザによる選択待ち状態に入る。
【0068】
ステップST77において、ユーザによる選択が完了した、つまり推奨経路上で右左折する仮交差点が存在しないことが判断されると、選択メニューの「案内開始」以外の項目が選択不可にされる(ステップST79)。その後、シーケンスはステップST70に戻り、再び、ユーザによる選択待ち状態に入る。
【0069】
以上説明したように、この発明の実施の形態1に係る地図情報処理装置によれば、HDD16に記憶されていない道路を走行した場合に、その道路をHDD16に追加記憶し、さらには既存道路との交差点を正確に反映したナビゲーションを実現できる。
【0070】
より詳しくは、この地図情報処理装置によれば、新規に検出された新規道路の始終点以外の地点における交差点の情報を利用することができる。また、仮交差点を通常の平面交差点と区別することで、立体交差のところを誤って通常の平面交差点と同様に処理することを防ぐことができる。また、平面交差点と決定された交差地点においては、その後の処理において既存道路における交差点と同様の扱いをすることが可能になる。また、平面交差点か立体交差かをユーザに問い合わせることで、機械的に平面交差点/立体交差を判断する場合と比較し、誤判断の発生を削減することができる。さらに、ユーザに問い合わせるタイミングを経路計算において仮交差点が平面交差点であるのか立体交差であるのかの判断が必要となる時点とすることで、問い合わせが頻発することを防ぐことができる。
【0071】
なお、この実施の形態1に係る地図情報処理装置では、新規道路情報と地図情報は別々のものとして存在するように構成したが、新規道路情報を地図情報の中に含める形で保存するように構成できる。この場合、道路更新情報生成手段21は、生成した新規道路情報を地図情報の中のどの位置に追加するか、また、新規道路情報を地図情報の中に追加することで、既存の地図情報の修正が必要になる場合は、どの情報をどのように修正する必要があるかを表現した道路更新情報の生成も行う。
【0072】
実施の形態2.
上述した実施の形態1に係る地図情報処理装置では、交差点決定手段23は、経路計算手段11によって算出された推奨経路が仮交差点における右左折を含む場合に、図14に示した画面を表示してユーザに提示し、仮交差点の状態をユーザが選択的に入力するように構成したが、この実施の形態2に係る地図情報処理装置では、仮交差点の状態の入力を、地図情報処理装置の電源OFF信号が発生された時に行うようにしたものである。
【0073】
図17は、地図情報処理装置の電源OFF信号が発生された時に、ユーザが仮交差点の状態を選択的に入力するための画面の例を示す。この例では、表示画面は、仮交差点(図17中の新規交差点)を含む地図、仮交差点の状態を入力する画面であることを示すメッセージ、仮交差点の状態の入力をユーザに促す選択メニュー、設定終了ボタンから構成されている。図17に示す表示は、交差点問合せ手段22によって実施される。
【0074】
図18は、図17に示した仮交差点の状態を選択する画面の提示後、交差点決定手段23によって仮交差点の状態が設定されるまでの交差点決定処理を示すフローチャートである。
【0075】
この交差点決定処理では、交差点問合せ手段22によって図17に示す画面が表示された後、ユーザによる選択待ちに入る(ステップST80)。次いで、選択メニューの何れかの項目が選択されたかどうかが調べられる(ステップST81)。ここで、何れも選択されていないことが判断されると、シーケンスはステップST80に戻り、再び、ユーザによる選択待ちに入る。
【0076】
ステップST81で、選択メニューの何れかの項目が選択されたことが判断されると、次いで、「設定終了」が選択されたかどうかが調べられる(ステップST82)。ここで、設定終了が選択されたことが判断されると、交差点決定処理は終了する。一方、案内開始が選択されていないことが判断されると、次いで、「立体交差」が選択されたかどうかが調べられる(ステップST83)。ここで、立体交差が選択されたことが判断されると、HDD16に記憶されている当該仮交差点における通行規制が、右左折の全組合せ(直進を除く)についてOKからNGに変更される(ステップST84)。次いで、HDD16に記憶されている当該仮交差点における仮交差点フラグがOFFに変更される(ステップST85)。
【0077】
上記ステップST83で、立体交差が選択されていないことが判断されると、次いで、「通常交差点」が選択されたかどうかが調べられる(ステップST86)。ここで、通常交差点が選択されたことが判断されると、シーケンスはステップST85に移り、上述した処理が実行される。一方、通常交差点が選択されていない、つまり「不明」が選択されたことが判断されると、シーケンスはステップST87に移る。この場合、仮交差点は、そのまま残される。
【0078】
ステップST87では、全ての仮交差点についてユーザによる選択が完了したかどうかが調べられる。ここで、ユーザによる選択が完了していない、つまり仮交差点が未だ残っていることが判断されると、次の仮交差点における選択メニューが表示される(ステップST88)。次の仮交差点の選択は、仮交差点は測位手段15によって測位される自己の現在位置からの距離が近い順に行われる。その後、シーケンスはステップST80に戻り、再び、ユーザによる選択待ち状態に入る。
【0079】
ステップST87において、ユーザによる選択が完了した、つまり仮交差点が残っていないことが判断されると、選択メニューの「設定終了」以外の項目が選択不可にされる(ステップST89)。その後、シーケンスはステップST80に戻り、再び、ユーザによる選択待ち状態に入る。
【0080】
以上説明したように、この発明の実施の形態2に係る地図情報処理装置によれば、地図情報処理装置の電源OFF信号が発生した時点、すなわち、地図情報処理装置の動作が終了する時点において、仮交差点の状態をユーザが設定可能になる。したがって、走行中に問い合わせが発生することを防ぐことができる。また、走行中に発生した仮交差点を、地図情報処理装置の動作の終了時に確認して、正式の交差点として地図情報および新規道路情報に組み込むことができる。
【0081】
また、この実施の形態2に係る地図情報処理装置では、地図情報処理装置の電源OFF信号が発生した時点で、ユーザが仮交差点の状態を選択的に入力するように構成したが、地図情報処理装置の電源ON信号が発生して地図情報処理装置が起動された時に、仮交差点の状態を選択的に入力するように構成することもできる。
【0082】
この構成によれば、起動時に仮交差点の状態を選択的に入力することにより、走行中に問い合わせが発生することを防ぐことができると同時に、ユーザが持っている最新の知識を地図情報に反映した交差点情報によって地図情報処理装置の動作を開始することができる。また、降車時に地図情報処理装置を操作する必要がないので、ユーザは、余裕をもって仮交差点の設定を行うことができる。
【0083】
また、この実施の形態2に係る地図情報処理装置では、図17に示す画面が表示されたときに、ユーザが設定すべき仮交差点の範囲は特に限定されていないが、設定すべき仮交差点の範囲を限定するように構成することもできる。この場合、ユーザは不要な設定操作から解放されることができる。ユーザが設定すべき仮交差点の範囲は、測位手段15によって測位される自己の現在位置からの距離によって決定するように構成できる。なお、目的地が設定されている場合には、現在位置と目的地とによって算出される適切な範囲によって、ユーザが設定すべき仮交差点の範囲を決定するように構成できる。また、ユーザが予め設定した範囲によって、ユーザが設定すべき仮交差点の範囲を決定するように構成することもできる。
【0084】
実施の形態3.
この発明の実施の形態3に係る地図情報処理装置は、実際の走行時に右左折したという情報に基づいて仮交差点の状態を設定するようにしたものである。
【0085】
図19は、この発明の実施の形態3に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置に方向指示器46が追加されるとともに、カーナビゲーション装置から交差点問合せ手段22が除去され、右左折検出手段26が追加されて構成されている。また、交差点決定手段23の動作が実施の形態1に係る地図情報処理装置のそれと異なる。
【0086】
方向指示器46は、地図情報処理装置が設置されている車両が右左折するときに、第三者にその右左折を伝達するために使用される。この方向指示器46によって示される右左折の方向を表す信号は、右左折検出手段26に送られる。
【0087】
右左折検出手段26は、角速度センサ44から送られてくる自己の方向変化を表す信号または方向指示器46からの信号に基づいて、自己の方向変化を検出する。この右左折検出手段26における検出結果は、制御手段25を介して交差点決定手段23に送られ、仮交差点の状態を設定するために使用される。
【0088】
次に、この発明の実施の形態3に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図20に示すフローチャートを参照しながら説明する。
【0089】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST90)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、その仮交差点で右左折がなされたことが右左折検出手段26によって検知されたかどうかが調べられる(ステップST91)。ここで、右左折が検知されたことが判断されると、その仮交差点における仮交差点フラグがOFFに変更され(ステップST92)、その後、処理は終了する。上記ステップST91において右左折が検知されなかったことが判断された場合も、処理は終了する。
【0090】
以上説明したように、この発明の実施の形態3に係る地図情報処理装置によれば、交差点で右左折することによって自動的に仮交差点が通常の平面交差点であることを認識し、その後は平面交差点として扱うことができる。また、方向指示器46の右左折情報で仮交差点が通常の平面交差点であることを認識できる。
【0091】
実施の形態4.
この発明の実施の形態4に係る地図情報処理装置は、高度情報に基づいて仮交差点の状態を設定するようにしたものである。
【0092】
この実施の形態4に係る地図情報処理装置の構成は、以下の点を除き、図1に示した実施の形態1に係る地図情報処理装置のそれと同じである。即ち、地図情報記憶手段16aに記憶される地図情報に含まれる道路情報は、ノードに関連付けられた情報として、そのノードの高度情報を予め含んでいる。また、新規道路情報記憶手段16bに記憶される新規道路情報には、ノードに関連付けられた情報として、そのノードの高度情報が含まれる。この高度情報は、測位手段15がGPS受信アンテナ45から得られるGPS信号に基づいて生成される。さらに、交差点決定手段23は、高度情報に基づいて仮交差点の状態を設定する。なお、実施の形態4に係る地図情報処理装置では、実施の形態1に係る地図情報処理装置における交差点問合せ手段22は不要である。
【0093】
次に、この発明の実施の形態4に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図21に示すフローチャートを参照しながら説明する。
【0094】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST100)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、HDDアクセス手段17を介して、HDD16の新規道路情報記憶手段16bに記憶されている新規道路情報から、その仮交差点に対応するノード情報を検索し、検索されたノード情報から高度情報が取得される(ステップST101)。
【0095】
次に、交差している相手の道路が地図情報の中に存在するか否かが調べられる(ステップST102)。この処理は、新規道路情報に含まれている交差情報を参照し、交差情報に記述されている交差相手の道路が地図情報の中に存在するか否かを調べることによって行われる。このステップST102で、交差している相手の道路が地図情報の中に存在することが判断されると、次いで、HDDアクセス手段17を介して、HDD16の地図情報記憶手段16aに記憶されている地図情報から該当する仮交差点のノード情報が検索され、そのノードの高度情報が取得される(ステップST103)。その後、シーケンスはステップST105に進む。
【0096】
上記ステップST102で、交差している相手の道路が地図情報の中に存在しないことが判断されると、次いで、HDDアクセス手段17を介して、HDD16の新規道路情報記憶手段16bに記憶されている新規道路情報から該当する仮交差点のノード情報が検索され、そのノードの高度情報が取得される(ステップST104)。その後、シーケンスはステップST105に進む。
【0097】
ステップST104では、ステップST101で取得された高度情報と、ステップST103またはステップST104で取得された高度情報とから高度差が算出される(ステップST105)。次いで、ステップST105で算出された高度差が予め定められた一定値以上であるかどうかが調べられる(ステップST106)。このステップST106で、一定値以上であることが判断されると、2つの道路は立体交差であることが認識され、その仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST107)。次いで、その仮交差点における仮交差点フラグがOFFに変更され(ステップST108)、処理は終了する。上記ステップST106において、ステップST105で算出された高度差が一定値未満であることが判断されると、2つの道路は平面交差であることが認識され、シーケンスはステップST108に進む。
【0098】
以上説明したように、この発明の実施の形態4に係る地図情報処理装置によれば、新規道路と既存の道路の交差地点における高さを比較することで自動的に仮交差点が通常の平面交差点か立体交差かを判断することができる。また、新規道路同士の交差地点においても、高さを比較することで自動的に仮交差点が平面交差しているか立体交差しているかを判断することができる。
【0099】
実施の形態5.
この発明の実施の形態5に係る地図情報処理装置は、実際の走行時に停止したという情報に基づいて仮交差点の状態を設定するようにしたものである。
【0100】
図22は、この発明の実施の形態5に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置のカーナビゲーション装置から交差点問合せ手段22が除去されて構成されている。また、HDD16の内部に走行履歴情報記憶手段16cが追加されている。
【0101】
また、地図情報処理装置の構成要素のうち、以下の点が実施の形態1に係る地図情報処理装置のそれと異なる。即ち、測位手段15は、車速センサ43からの信号に基づいて速度を検出する。また、測位手段15によって測位された位置とその位置を走行時の速度が走行履歴情報としてHDD16の走行履歴情報記憶手段16cに記憶される。さらに、交差点決定手段23は、走行履歴情報を参照し、仮交差点の状態を設定する。
【0102】
次に、この発明の実施の形態5に係る地図情報処理装置の交差点決定手段23において行われる、走行履歴情報を参照して仮交差点の状態を設定する処理を、図23に示すフローチャートを参照しながら説明する。
【0103】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST110)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、HDD16の走行履歴情報記憶手段16cに記憶されている走行履歴情報から当該仮交差点直前の速度推移が取得される(ステップST111)。
【0104】
次いで、ステップST111で取得された速度推移に基づいて、仮交差点直前で一時停車したかどうかが調べられる(ステップST112)。ここで、一時停車したことが判断されると、その仮交差点は通常の交差点であることが認識され、その仮交差点における仮交差点フラグがOFFに変更され(ステップST113)、その後、処理は終了する。上記ステップST112において一時停車しなかったことが判断された場合も、処理は終了する。
【0105】
以上説明したように、この発明の実施の形態5に係る地図情報処理装置によれば、新規道路と既存の道路の交差地点に進入する直前に赤信号によって停車した場合に自動的に仮交差点が通常の平面交差点であると判断することができる。
【0106】
実施の形態6.
この発明の実施の形態6に係る地図情報処理装置は、実際の走行時に新規道路から既存の道路に移動したという情報に基づいて仮交差点の状態を設定するようにしたものである。
【0107】
この実施の形態6に係る地図情報処理装置の構成は、交差点問合せ手段22が不要である点を除き、図1に示した実施の形態1に係る地図情報処理装置のそれと同じである。
【0108】
次に、この発明の実施の形態6に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図24に示すフローチャートを参照しながら説明する。
【0109】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST120)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、一時記憶メモリ18に記憶されている直前の測位結果から、仮交差点に進入した道路が取得される(ステップST121)。
【0110】
次いで、地図情報処理装置が仮交差点から脱出したかどうかが調べられる(ステップST122)。ここで、仮交差点から脱出していないことが判断されると、測位手段15によって得られる次回の測位結果から現在位置が検出される(ステップST123)。次いで、検出された現在位置が既存道路上に位置するかどうかが調べられる(ステップST124)。ここで、既存道路上に位置していないことが判断されると、新たな新規道路の検出処理に移行するために、交差点決定の処理を終了する。
【0111】
一方、ステップST124において、既存道路上に位置していることが判断されると、前回の測位結果が一時記憶メモリ18から削除される(ステップST125)。次いで、ステップST123で検出された最新の測位結果が一時記憶メモリ18に記憶される(ステップST126)。その後、シーケンスはステップST122に戻る。
【0112】
上記ステップST122において仮交差点から脱出したことが判断されると、ステップST121で取得された、仮交差点に進入してきた道路が、HDD16の地図情報記憶手段16aに記憶されている地図情報に含まれる道路か、または、HDD16の新規道路情報記憶手段16bに記憶されている新規道路情報に含まれる道路かが調べられる(ステップST127)。
【0113】
このステップST127において、地図情報に含まれる道路であることが判断されると、一時記憶メモリ18に記憶されている最新の測位結果を参照し、仮交差点から脱出して現時点で位置している道路(脱出道路)が取得される(ステップST128)。そして、ステップST128で取得した脱出道路が新規道路情報に含まれる道路かどうかが調べられる(ステップST129)。
【0114】
このステップST129において、脱出道路が新規道路情報に含まれない道路であることが判断されると、進入道路と脱出道路がともに地図情報に含まれる道路であるため、仮交差点の状態の設定は行われずに、処理は終了する。一方、ステップST129において、脱出道路が新規道路情報に含まれる道路であることが判断された場合は、仮交差点において地図情報に含まれる道路から進入し、新規道路情報に含まれる道路へ脱出したことになるため、この仮交差点は通常の交差点であると認識され、その仮交差点の仮交差点フラグがOFFに変更される(ステップST130)。その後、処理は終了する。
【0115】
上記ステップST127において、地図情報に含まれる道路でないことが判断されると(この場合は、仮交差点に進入した道路が新規道路情報に含まれる道路)、一時記憶メモリ18に記憶されている最新の測位結果を参照し、仮交差点から脱出して現時点で位置している道路が取得される(ステップST131)。そして、その道路が地図情報に含まれる道路であるかどうかが調べられる(ステップST132)。
【0116】
このステップST132において、地図情報に含まれる道路であると判断されると、仮交差点において新規道路情報に含まれる道路から進入し、地図情報に含まれる道路へ脱出したことになるため、この仮交差点は通常の交差点であると認識され、シーケンスはステップST130へ進む。
【0117】
一方、ステップST132において、地図情報に含まれない道路であると判断された場合は、脱出道路も新規道路情報に含まれる道路になり、進入道路と脱出道路がともに新規道路情報に含まれる道路ということになる。そこで、脱出道路である新規道路情報に含まれる道路が、進入道路である新規道路情報に含まれる道路と異なるか否かが調べられる(ステップST133)。ここで、異なることが判断された場合は、この仮交差点は通常の交差点であると認識され、シーケンスはステップST130に移る。一方、一致することが判断された場合は、この仮交差点は通常の交差点であるかどうかを判断できないため、処理は終了する。
【0118】
以上説明したように、この発明の実施の形態6に係る地図情報処理装置によれば、仮交差点において新規道路から入り、既存の道路へ出た場合に自動的に仮交差点が通常の平面交差点であると判断することができる。また、仮交差点において既存道路から入り、新規道路へ出た場合に自動的に仮交差点が通常の平面交差点であると判断することができる。さらに、仮交差点において新規道路から入り、別の新規道路へ出た場合に自動的に仮交差点が通常の平面交差点であると判断することができる。
【0119】
実施の形態7.
この発明の実施の形態7に係る地図情報処理装置は、撮影装置で撮影することにより得られた画像情報に基づいて仮交差点の状態を設定するようにしたものである。
【0120】
図25は、この発明の実施の形態7に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置に、例えばカメラから成る撮影装置47が追加されるとともに、カーナビゲーション装置から交差点問合せ手段22が除去され、映像信号処理手段27が追加されて構成されている。また、交差点決定手段23の動作が実施の形態1に係る地図情報処理装置のそれと異なる。
【0121】
撮影装置47は、地図情報処理装置が搭載された車両の周囲を撮影する。この撮影装置47で撮影することにより得られた映像信号は、映像信号処理手段27に送られる。映像信号処理手段27は、撮影装置47から送られてくる映像信号を処理し、道路の状況を表す映像情報として出力する。
【0122】
次に、この発明の実施の形態7に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図26に示すフローチャートを参照しながら説明する。
【0123】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST140)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、映像情報を解析し、立体交差かどうかの判定が行われる(ステップST141)。次いで、ステップST141における判定結果が立体交差であるかどうかが調べられる(ステップST142)。
【0124】
このステップST142において、立体交差であると判断されると、その仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST143)。次いで、その仮交差点における仮交差点フラグがOFFに変更される(ステップST144)。その後、処理は終了する。ステップST142において、立体交差でないと判断されると、次いで、ステップST141における判定結果が平面交差点であるかどうかが調べられる(ステップST145)。ここで、平面交差点であると判断されると、シーケンスはステップST144に移る。一方、平面交差点でないと判断されると、その仮交差点の状態は不明であると判断され、処理を行わずに終了する。
【0125】
以上説明したように、この発明の実施の形態7に係る地図情報処理装置によれば、撮影装置47の撮影画像から仮交差点が平面交差点か立体交差かを自動的に判断できる。
【0126】
実施の形態8.
この発明の実施の形態8に係る地図情報処理装置は、有料道路を走行したという情報に基づいて仮交差点の状態を設定するようにしたものである。
【0127】
図27は、この発明の図1に示した実施の形態1に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図25に示した実施の形態7に係る地図情報処理装置に、ETC(Electronic Toll Collection System:自動料金収受システム)装置48、ETCアンテナ49および運転席側窓センサ50が追加されるとともに、カーナビゲーション装置に有料道路走行判定手段28、不揮発性のバックアップRAM29および仮交差点道路種別判定手段30が追加されて構成されている。また、交差点決定手段23の動作が実施の形態7に係る地図情報処理装置のそれと異なる。
【0128】
有料道路走行判定手段28は、有料道路を走行中であるか否かを判断し、有料道路走行中には一時記憶メモリ18に有料道路走行中情報を記憶させる。有料道路を走行中であるか否かは以下の方法で判断される。即ち、有料道路入口通過検知から有料道路出口通過検知までの間が有料道路を走行中であると判断され、有料道路入口通過検知後、有料道路走行中情報が一時記憶メモリ18に記憶される。また、有料道路出口通過検知後、一時記憶メモリ18から有料道路走行中情報が削除される。
【0129】
有料道路走行判定手段28は、次のいずれかの方法により有料道路入口通過検知を行う。第1の入口通過検知方法は、次の通りである。即ち、ETCアンテナ49およびETC装置48を装備した移動体(車両)が有料道路に進入する際、ETC装置48はETCアンテナ49を介して有料道路に進入するという交信情報をETC地上装置(図示せず)との間で送受する。有料道路走行判定手段28は、この交信情報を取得することで、有料道路入口通過を検知する。
【0130】
第2の入口通過検知方法は、次の通りである。即ち、測位手段15によって測位された結果から、自己が位置する道路が取得される。有料道路走行判定手段28は、この取得された道路の道路種別が非有料道路(一般国道、都道府県道、主要地方道など)から有料道路に変化したときに、有料道路入口通過を検知する。
【0131】
また、有料道路走行判定手段28は、次のいずれかの方法により有料道路出口通過検知を行う。第1の出口通過検知方法は、次の通りである。即ち、有料道路走行中情報が一時記憶メモリ18に記憶されているときに、ETC装置48がETCアンテナ49を介してETC地上装置と有料道路出口で交信し料金支払いを行う。有料道路走行判定手段28は、その料金支払いの情報をETC装置48から取得し、有料道路出口通過を検出する。
【0132】
第2の出口通過検知方法は、次の通りである。即ち、有料道路走行中情報が一時記憶メモリ18に記憶されているときに、ETC装置48に挿入されていたETCカードが抜かれ、車速センサ43によって自己の移動速度がゼロまたは限りなくゼロに近い状態が一定時間継続しており、運転席側窓センサ50によって窓が開いた状態にあることが検出されたとき、有料道路走行判定手段28は、有料道路出口通過を検出する。
【0133】
第3の出口通過検知方法は、次の通りである。即ち、測位手段15によって測位された結果から、自己の位置する道路が取得される。有料道路走行判定手段28は、この取得された道路の道路種別が有料道路から非有料道路に変化したときに、有料道路出口通過を検出する。
【0134】
次に、有料道路走行中情報が一時記憶メモリ18に記憶されている状態で、サービスエリアなどで地図情報処理装置を搭載した車両がエンジンを停止し、地図情報処理装置の動作が終了する場合の動作を説明する。
【0135】
図28は、地図情報処理装置の電源OFF時の終了処理を示すフローチャートである。この終了処理が開始されると、まず、一時記憶メモリ18に有料道路走行中情報があるかどうかが調べられる(ステップST150)。ここで、有料道路走行中情報がないことが判断されると、終了処理は終了する。
【0136】
一方、ステップST150において、有料道路走行中情報があることが判断されると、一時記憶メモリ18に記憶されている有料道路走行中情報が読み出される(ステップST151)。次いで、その読み出された有料道路走行中情報がバックアップRAM29に記憶される(ステップST152)。以上により、終了処理は終了する。
【0137】
図29は、地図情報処理装置の電源ON時の起動処理を示すフローチャートである。この起動処理が開始されると、まず、バックアップRAM29に有料道路走行中情報が記憶されているかどうかが調べられる(ステップST160)。ここで、有料道路走行中情報が記憶されていないことが判断されると、起動処理は終了する。
【0138】
一方、ステップST160において、有料道路走行中情報が記憶されていることが判断されると、バックアップRAM29から有料道路走行中情報が読み出される(ステップST161)。次いで、その読み出された有料道路走行中情報が一時記憶メモリ18に記憶される(ステップST162)。以上により、起動処理は終了する。
【0139】
これら終了処理および起動処理により、有料道路走行中情報が一時記憶メモリ18に記憶されている状態で、サービスエリアなどで地図情報処理装置を搭載した車両がエンジンを停止し、地図情報処理装置の動作が終了する場合にも対応できる。
【0140】
次に、この発明の実施の形態8に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図30および図31に示すフローチャートを参照しながら説明する。
【0141】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST170)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、一時記憶メモリ18から有料道路走行中情報が取得される(ステップST171)。
【0142】
次いで、有料道路走行中情報を取得できたかどうかが調べられる(ステップST172)。ここで、有料道路走行中情報を取得できたことが判断されると、現在有料道路走行中であるので、その仮交差点は立体交差であると認識され、仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST173)。次いで、その仮交差点における仮交差点フラグがOFFに変更される(ステップST174)、その後、処理は終了する。
【0143】
上記ステップST172で、有料道路走行中情報を取得できなかったことが判断されると、交差道路種別判定処理が実行される(ステップST175)。この交差道路種別判定処理は、仮交差点道路種別判定手段30により実行されるものであり、仮交差点において交差している道路の道路種別が算出される。この交差道路種別判定処理の詳細は後述する。
【0144】
次いで、ステップST175において算出された交差道路のうち、少なくとも1つの道路種別が有料道路であるかどうかが調べられる(ステップST176)。ここで、少なくとも1つの道路種別が有料道路であることが判断されると、当該仮交差点は立体交差であると認識され、シーケンスはステップST173に移る。一方、少なくとも1つの道路種別が有料道路でない、つまり交差道路に道路種別が有料道路である道路が存在しないことが判断されると、処理は終了する。
【0145】
図31は、図30のステップST175で実行される交差道路種別判定処理の詳細を示すフローチャートである。この交差道路種別判定処理は、仮交差点道路種別判定手段30により実行される。
【0146】
交差道路種別判定処理では、まず、仮交差点において交差する全ての道路について道路種別の判定が終了したかどうかが調べられる(ステップST180)。ここで、全ての道路について道路種別の判定が終了したことが判断されると、交差道路種別判定処理は終了する。一方、ステップST180で、全ての道路について道路種別の判定が終了していない、つまり未判定の道路が残っていることが判断されると、その未判定の道路の中から1つが選択される(ステップST181)。そして、選択された道路が地図情報に含まれる道路情報であるかどうかが調べられる(ステップST182)。
【0147】
このステップST182で、選択された道路が地図情報に含まれる道路情報であることが判断されると、地図情報からその道路情報が取得される(ステップST183)。その後、シーケンスはステップST185に進む。一方、ステップST182で、選択された道路が地図情報に含まれる道路情報でない、つまり新規道路情報に含まれる道路であることが判断されると、新規道路情報からその道路情報が取得される(ステップST184)。その後、シーケンスはステップST185に進む。
【0148】
ステップST185では、取得された道路情報から道路種別が取得される。次いで、現在選択されている道路とその道路種別の組が一時記憶メモリ18に記憶される(ステップST186)。その後、シーケンスはステップST180に戻り、上述した処理が繰り返される。
【0149】
以上説明したように、この発明の実施の形態8に係る地図情報処理装置によれば、仮交差点で交差している高速道路を走行したときに、仮交差点を立体交差と判断できる。また、高速道路における仮交差点を自動的に立体交差であると判断できる。
【0150】
なお、上述した実施の形態8に係る地図情報処理装置では、地図情報処理装置の電源OFF時に一時記憶メモリ18に記憶されている有料道路走行中時をバックアップRAM29に保存し、電源ON時にバックアップRAM29から読み出して一時記憶メモリ18にリストアするように構成したが、バックアップRAM29の替わりにHDD16を用いることもできる。
【0151】
実施の形態9.
この発明の実施の形態9に係る地図情報処理装置は、高架下を走行したという情報に基づいて仮交差点の状態を設定するようにしたものである。
【0152】
図32は、この発明の実施の形態9に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置に、照度計51が追加されるとともに、カーナビゲーション装置に照度計測手段31および高架下通過検出手段32が追加されて構成されている。また、交差点決定手段23の動作が実施の形態1に係る地図情報処理装置のそれと異なる。
【0153】
照度計51は、移動体(車両)に照射される光量を検出する。この照度計51で検出された光量は、照度計測手段31に送られる。照度計測手段31は、接続されている照度計51を用い、移動体に照射される光量を計測する。高架下通過検出手段32は、移動体が高架下を通過したことを検出する。この高架下通過検出手段32の詳細は後述する。
【0154】
次に、この発明の実施の形態9に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図33および図34に示すフローチャートを参照しながら説明する。
【0155】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に接続された道路を仮交差点方向へ走行中であるかどうかが調べられる(ステップST190)。ここで、仮交差点方向へ走行中でないことが判断されると、処理は終了する。一方、仮交差点方向へ走行中であることが判断されると、測位待ちに入る(ステップST191)。
【0156】
次いで、地図情報処理装置が仮交差点に接近したかどうかが調べられる(ステップST192)。より詳しくは、測位手段15によって測位された自己の現在位置と仮交差点との間の距離が、予め定められた距離以内になったかどうかが調べられる。このステップST192において、仮交差点に接近していないことが判断されると、シーケンスはステップST191に戻り、再び測位待ちに入る。一方、ステップST192において、仮交差点に接近したことが判断されると、次いで、高架下通過判定処理が行われる(ステップST193)。この高架下通過判定処理は、高架下通過検出手段32により実行されるものであり、高架構造物の有無を検出する。この高架下通過判定処理の詳細は後述する。
【0157】
次いで、高架下を通過したかどうか、つまり高架構造物があるかどうかが調べられる(ステップST194)。ここで、高架下を通過していないことが判断されると、処理は終了する。一方、ステップST194において、高架下を通過したことが判断されると、仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST195)。次いで、その仮交差点における仮交差点フラグがOFFに変更される(ステップST196)、以上により、処理は終了する。
【0158】
図34は、図33のステップST193で実行される高架下通過判定処理の詳細を示すフローチャートである。この高架下通過判定処理は、高架下通過検出手段32により実行される。
【0159】
高架下通過判定処理では、まず、照度計測手段31によって照度が計測され、直前照度情報として一時記憶メモリ18に記憶される(ステップST200)。次いで、測位手段15による測位待ちに入る(ステップST201)。次いで、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST202)。ここで、仮交差点に到達していないことが判断されると、シーケンスはステップST201に戻り、再び測位待ちに入る。一方、ステップST202において、仮交差点に到達したことが判断されると、次いで、照度計測手段31によって照度が計測され、交差点照度情報として一時記憶メモリ18に記憶される(ステップST203)。
【0160】
次いで、測位手段15による測位待ちに入る(ステップST204)。次いで、地図情報処理装置が仮交差点から脱出したかどうかが調べられる(ステップST205)。ここで、仮交差点から脱出していないことが判断されると、シーケンスはステップST204に戻り、再び測位待ちに入る。一方、ステップST205において、仮交差点から脱出したことが判断されると、次いで、照度計測手段31によって照度が計測され、直後照度情報として一時記憶メモリ18に記憶される(ステップST206)。
【0161】
その後、一時記憶メモリ18に記憶されている3種類の照度情報から、高架構造物の検出が行われる。即ち、まず、直前照度情報と交差点照度情報とが比較され、交差点での照度が交差点直前での照度よりも急激に減少しているかどうかが調べられる(ステップST207)。ここで、急激に減少していないことが判断されると、処理は終了する。一方、ステップST207で、急激に減少したことが判断されると、次いで、直前照度情報と直後照度情報とが比較され、交差点直前での照度と交差点直後での照度の差がある一定値以内であるかどうかが調べられる(ステップST208)。
【0162】
このステップST208で、一定値以内でないことが判断されると、処理は終了する。一方、一定値以内であることが判断されると、その交差地点には高架構造物が存在すると判断され、高架下を通過したことが判定される(ステップST209)。以上により、高架下通過検出手段32による高架下通過判定処理は終了する。
【0163】
以上説明したように、この発明の実施の形態9に係る地図情報処理装置によれば、仮交差点に高架道路があるときに、仮交差点を自動的に立体交差であると判断できる。また、仮交差点において照度の変化によって高架をくぐったことを判断し、仮交差点を自動的に立体交差であると判断できる。
【0164】
実施の形態10.
この発明の実施の形態10に係る地図情報処理装置は、GPS衛星および準天頂衛星の捕捉の可否に基づいて仮交差点の状態を設定するようにしたものである。
【0165】
図35は、この発明の実施の形態10に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置に、準天頂衛星受信アンテナ52が追加されるとともに、カーナビゲーション装置に高架下通過検出手段32および捕捉衛星検出手段33が追加されて構成されている。また、交差点決定手段23の動作が実施の形態1に係る地図情報処理装置のそれと異なる。
【0166】
交差点決定手段23の構成および動作は、実施の形態9に係る地図情報処理装置のそれと同じである。
【0167】
捕捉衛星検出手段33は、接続されているGPS受信アンテナ45からのGPS信号および準天頂衛星受信アンテナ52からの準天頂信号に基づいて、捕捉可能なGPS衛星や準天頂衛星を検出し、GPS衛星および準天頂衛星がどの方向に捕捉できているかを算出する。
【0168】
次に、この発明の実施の形態10に係る地図情報処理装置の高架下通過検出手段32において行われる処理を、図36および図37に示すフローチャートを参照しながら説明する。
【0169】
この仮交差点の状態を設定する処理では、まず、捕捉衛星検出手段33によって捕捉できる衛星が検出され、捕捉できた衛星の中で、天頂付近、例えば仰角が75度以上の衛星の方向および衛星を特定するIDが、直前衛星情報として一時記憶メモリ18に記憶される(ステップST210)。その後、測位手段15による測位待ちに入る(ステップST211)。
【0170】
次いで、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST212)。ここで、仮交差点に到達していないことが判断されると、シーケンスはステップST211に戻り、再び測位待ちに入る。一方、ステップST212において、仮交差点に到達したことが判断されると、次いで、ステップST210における処理と同様に、天頂付近で捕捉できた衛星の情報が交差点衛星情報として一時記憶メモリ18に記憶される(ステップST213)。その後、測位手段15による測位待ちに入る(ステップST214)。
【0171】
次いで、地図情報処理装置が仮交差点から脱出したかどうかが調べられる(ステップST215)。ここで、仮交差点から脱出していないことが判断されると、シーケンスはステップST214に戻り、再び測位待ちに入る。一方、ステップST215において、仮交差点から脱出したことが判断されると、次いで、ステップST210における処理と同様に、天頂付近で捕捉できた衛星の情報が直後衛星情報として一時記憶メモリ18に記憶される(ステップST216)。
【0172】
次いで、一時記憶メモリ18に記憶されている3種類の衛星情報から高架判定処理が行われる(ステップST217)。この高架判定処理は、高架下通過検出手段32により実行される。図37は、このステップST217で実行される高架判定処理の詳細を示すフローチャートである。
【0173】
この高架判定処理では、まず、一時記憶メモリ18に記憶されている直前衛星情報が参照され、その中に準天頂衛星が捕捉されている情報があるかどうかが調べられる(ステップST220)。このステップST220において、準天頂衛星が捕捉されている情報があることが判断されると、次いで、一時記憶メモリ18に記憶されている交差点衛星情報が参照され、その中に準天頂衛星が補足されている情報があるかどうかが調べられる(ステップST221)。
【0174】
このステップST221において、準天頂衛星が補足されている情報がないことが判断されると、一時記憶メモリ18に記憶されている直後衛星情報が参照され、その中に準天頂衛星が補足されている情報があるかどうかが調べられる(ステップST222)。このステップST222において、準天頂衛星が補足されている情報があることが判断されると、仮交差点において高架下を通過したと判定され(ステップST223)、高架判定処理は終了する。
【0175】
上記ステップST220において準天頂衛星が捕捉されている情報がないことが判断された場合、または上記ステップST221において準天頂衛星が捕捉されている情報があることが判断された場合、または上記ステップST222において準天頂衛星が捕捉されている情報がないことが判断された場合、直前衛星情報が参照され、天頂付近(予め天頂付近の範囲を定めておく。例えば、仰角75度以上など)で捕捉されているGPS衛星が抽出される(ステップST224)。次いで、一時記憶メモリ18に記憶されている交差点衛星情報が参照され、ステップST224において抽出された全てのGPS衛星が交差点衛星情報の中で捕捉されていないかどうかが調べられる(ステップST225)。ここで、ステップST224で抽出された全てのGPS衛星が交差点衛星情報で補足できていないことが判断されると、それらの抽出されたGPS衛星が、一時記憶メモリ18に記憶されている直後衛星情報の中で捕捉されているかどうかが調べられる(ステップST226)。
【0176】
このステップST226において、全ての衛星が捕捉されていることが判断されると、シーケンスはステップST223へ移り、そうでない場合は、高架判定処理は終了する。上記ステップST225において、ステップST224で抽出された全てのGPS衛星が交差点衛星情報で補足できていないと判断されなかった場合は、高架判定処理は終了する。
【0177】
以上説明したように、この発明の実施の形態10に係る地図情報処理装置によれば、仮交差点において捕捉できる衛星の変化によって高架をくぐったことを判断し、仮交差点を自動的に立体交差であると判断できる。
【0178】
実施の形態11.
この発明の実施の形態11に係る地図情報処理装置は、DSRC(Dedicated Short Range Communication :専用狭帯域通信)により得られた信号に基づいて仮交差点の状態を設定するようにしたものである。
【0179】
図38は、この発明の実施の形態11に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置に、DSRCアンテナ53が追加されるとともに、カーナビゲーション装置にDSRC送受信手段34が追加されて構成されている。また、交差点決定手段23の動作が実施の形態1に係る地図情報処理装置のそれと異なる。DSRC送受信手段34および交差点決定手段23は、この発明の受信手段に対応する。
【0180】
DSRC送受信手段34は、DSRCアンテナ53に接続されており、このDSRCアンテナ53によって受信された信号を処理するとともに、DSRCアンテナ53を介して外部に情報を送信する。
【0181】
なお、以下では、交差点付近に、その交差点の交差点状況(立体交差か平面交差点か)と交差点位置(緯度および経度)が保持されており、これらの情報をDSRC信号として発信するDSRC路側機(図示しない)が設置されているものとする。
【0182】
次に、この発明の実施の形態11に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図39に示すフローチャートを参照しながら説明する。
【0183】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が交差点状況を表すDSRC信号を受信したかどうかが調べられる(ステップST230)。ここで、DSRC信号を受信していないことが判断されると、処理は終了する。一方、DSRC信号を受信したことが判断されると、次いで、当該交差点に該当する仮交差点が新規道路情報および地図情報から検索される(ステップST231)。この検索は、DSRC路側機から受信したDSRC信号に含まれる交差点位置を表す情報に基づいて行われる。
【0184】
次いで、ステップST231における検索結果に基づき、当該交差点に該当する仮交差点があるかどうかが調べられる(ステップST232)。ここで、仮交差点がないことが判断されると、処理は終了する。一方、仮交差点が有ることが判断されると、次いで、その仮交差点が立体交差であるかどうかが調べられる(ステップST233)。これは、DSRC路側機から受信したDSRC信号に含まれる交差点状況を調べることにより行われる。
【0185】
このステップST233において、立体交差であることが判断されると、次いで、その仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST234)。次いで、その仮交差点における仮交差点フラグがOFFに変更される(ステップST235)。その後、処理は終了する。ステップST233において、立体交差でないことが判断されると、次いで、その仮交差点が平面交差であるかどうかが調べられる(ステップST236)。これは、DSRC路側機から受信したDSRC信号に含まれる交差点状況を調べることにより行われる。このステップST236において、平面交差であることが判断されるとシーケンスはステップST235に移る。一方、平面交差でないことが判断されると、処理は終了する。
【0186】
以上説明したように、この発明の実施の形態11に係る地図情報処理装置によれば、外部のDSRC路側機から取得した情報に基づいて平面交差と立体交差を区別できる。
【0187】
なお、上述した実施の形態11に係る地図情報処理装置では、交差点付近に設置されたDSRC路側機に交差点状況が保持されている場合について説明したが、複数のDSRC路側機を接続する情報センタで各交差点の交差点状況を保持しておき、DSRC路側機に配信するように構成することもでき、この構成によっても上述した効果と同様の効果が得られる。この場合、情報センタとしては、交差点状況の情報配信を専用に行うセンタや、インターネット上で地図情報を提供しているサービスプロバイダや、他車が検知した情報をプローブ的に配信するセンタなどを利用することができる。また、通信手段としては、DSRC通信以外の通信、例えば、無線LANによる通信を用いることができる。
【0188】
実施の形態12.
この発明の実施の形態12に係る地図情報処理装置は、DSRC通信により情報センタから取得した情報に基づいて仮交差点の状態を設定するようにしたものである。
【0189】
この実施の形態12に係る地図情報処理装置の構成は、図39に示した実施の形態11に係る地図情報処理装置の構成と同じである。ただし、交差点決定手段23の動作は実施の形態11に係る地図情報処理装置のそれと異なる。
【0190】
なお、以下では、交差点が立体交差か平面交差点を示す交差点状況のデータベースを管理し、地図情報処理装置からの要求に応じ交差点状況を配信する情報センタ(図示しない)が設置されているものとする。
【0191】
次に、この発明の実施の形態12に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図40に示すフローチャートを参照しながら説明する。
【0192】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST240)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、DSRC通信が可能であるかどうかが調べられる(ステップST241)。ここで、DSRC通信が不可能であることが判断されると、処理は終了する。一方、DSRC通信が可能であることが判断されると、次いで、仮交差点の交差点状況配信が情報センタに要求される(ステップST242)。これは、当該仮交差点の位置情報または当該仮交差点を特定するための位置以外のユニークな識別子を情報センタに送信することにより行われる。
【0193】
その後、交差点状況の受信待ちに入る(ステップST243)。次いで、交差点状況が受信されたかどうかが調べられる(ステップST244)。ここで、交差点状況が受信されていないことが判断されると、シーケンスはステップST243に戻り、再び交差点状況の受信待ちに入る。一方、ステップST244において、交差点状況が受信されたことが判断されると、次いで、受信された交差点状況を参照し、当該仮交差点が立体交差であるか否かが調べられる(ステップST245)。
【0194】
ステップST245において、その仮交差点が立体交差であることが判断されると、その仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST246)。次いで、その仮交差点における仮交差点フラグがOFFに変更される(ステップST247)。その後、処理は終了する。ステップST245において、立体交差でないことが判断されると、次いで、その仮交差点が平面交差であるかどうかが調べられる(ステップST248)。ここで、平面交差であることが判断されるとシーケンスはステップST247に移る。一方、平面交差でないことが判断されると、処理は終了する。
【0195】
以上説明したように、この発明の実施の形態12に係る地図情報処理装置によれば、外部の情報センタからDSRC路側機を介して取得した情報に基づいて平面交差と立体交差を区別できる。
【0196】
なお、上述した実施の形態12に係る地図情報処理装置では、DSRC通信によって交差点状況配信要求を情報センタに送信し、情報センタから交差点状況を受信するように構成したが、通信は、DSRC通信に限らず、例えば、携帯電話によって情報センタと通信するように構成することもできる。この場合も上述した効果と同様の効果を得ることができる。また、通信としては、1つ以上の衛星を常に天頂付近で捕捉することができる準天頂衛星を介した通信、通信衛星による通信、あるいは、無線LANによる通信を用いることもでき、これらの場合も上述した効果と同様の効果を得ることができる。
【0197】
実施の形態13.
この発明の実施の形態13に係る地図情報処理装置は、放送により得られた信号に基づいて仮交差点の状態を設定するようにしたものである。
【0198】
図41は、この発明の実施の形態13に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置に、放送受信アンテナ54が追加されるとともに、カーナビゲーション装置に放送信号処理手段35が追加されて構成されている。また、交差点決定手段23の動作が実施の形態1に係る地図情報処理装置のそれと異なる。
【0199】
放送信号処理手段35は、放送受信アンテナ54によって受信された信号を処理し、カーナビゲーション装置の各部で利用可能なデータに変換する。放送信号処理手段35および放送受信アンテナ54は、この発明の受信手段に対応する。放送局は、交差点の位置情報(または、交差点を特定するユニークな識別子)と交差点状況(立体交差か平面交差点か)とを一組とする情報を保持しており、放送電波を使って放送する。
【0200】
次に、この発明の実施の形態13に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図42に示すフローチャートを参照しながら説明する。この処理は、道路情報更新手段24によって地図情報の更新および新規道路情報の追加記憶が完了した後に行われる。
【0201】
この仮交差点の状態を設定する処理では、まず、道路情報更新手段24による地図情報の更新および新規道路情報の追加記憶によって新たな仮交差点が登録されたかどうかが調べられる(ステップST250)。ここで、新たな仮交差点が登録されていないことが判断されると、処理は終了する。一方、新たな仮交差点が登録されたことが判断されると、次いで、放送されている交差点の位置情報(または識別子)と交差点状況が受信される(ステップST251)。
【0202】
次いで、受信が完了したかどうかが調べられる(ステップST252)。ここで、受信が完了していないことが判断されると、シーケンスはステップST251に戻り、交差点の位置情報と交差点状況の受信が継続される。一方、受信が完了したことが判断されると、次いで、状態を未確認の仮交差点、つまり立体交差か平面交差点かの判定が行われていない仮交差点が残っているかどうかが調べられる(ステップST253)。ここで、未確認の仮交差点が残っていないことが判断されると、処理は終了する。
【0203】
上記ステップST253において、未確認の仮交差点が残っていることが判断されると、状態を未確認の仮交差点から1つが選択される(ステップST254)。次いで、選択された仮交差点について、受信された情報の中から交差点状況が検索される(ステップST255)。ここでは、位置情報やユニークな識別子を利用して検索が行われる。次いで、ステップST255における検索の結果、当該仮交差点の交差点状況が存在するかどうかが調べられる(ステップST256)。ここで、該当する交差点状況が存在しないことが判断されると、信号はステップST253に戻る。
【0204】
上記ステップST256において、該当する交差点状況が存在することが判断されると、その交差点状況が参照され、その仮交差点が立体交差であるかどうかが調べられる(ステップST257)。ここで、立体交差であることが判断されると、その仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST258)。次いで、その仮交差点における仮交差点フラグがOFFに変更される(ステップST259)、その後、シーケンスはステップST253に戻る。上記ステップST257において、立体交差でないことが判断されると、その交差点は平面交差点であると判断され、シーケンスはステップST259に移る。
【0205】
以上説明したように、この発明の実施の形態13に係る地図情報処理装置によれば、外部からの放送を受信することにより取得した情報に基づいて平面交差と立体交差を区別できる。
【0206】
なお、上述した実施の形態13に係る地図情報処理装置では、交差点決定手段23による処理が開始されるたびに、放送される交差点位置情報および交差点状況を受信するように構成したが、一度受信したこれらの情報を一時記憶メモリ18またはHDD16に記憶しておき、次に交差点決定手段23による処理が行われる場合は、一時記憶メモリ18またはHDD16に記憶されている交差点位置情報および交差点状況を利用するように構成できる。この構成によれば、放送の受信処理を省略することができるので、処理を高速化することができる。
【0207】
実施の形態14.
この発明の実施の形態14に係る地図情報処理装置は、受信計画を作成し、この作成された受信計画に従って行われた放送から取得した信号に基づいて仮交差点の状態を設定するようにしたものである。
【0208】
この実施の形態14に係る地図情報処理装置の構成は、図41に示した実施の形態13に係る地図情報処理装置の構成と同じである。ただし、交差点決定手段23の動作は実施の形態13に係る地図情報処理装置のそれと異なる。
【0209】
次に、この発明の実施の形態14に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図43および図44に示すフローチャートを参照しながら説明する。この処理は、道路情報更新手段24によって地図情報の更新および新規道路情報の追加記憶が完了した後に行われる。
【0210】
図43は、放送局から放送されるメッシュ単位の交差点状況配信計画から、必要な交差点状況の受信計画を作成する処理を示すフローチャートである。図44は、受信計画に基づいて交差点状況を受信し、仮交差点の設定を行う処理を示すフローチャートである。交差点決定手段23は、図43に示す処理と図44に示す処理を並列で実行する。
【0211】
まず、受信計画を作成する処理を、図43に示すフローチャートを参照しながら説明する。この処理では、まず、道路情報更新手段24による地図情報の更新および新規道路情報の追加記憶において新たな仮交差点が登録されたか否かが調べられる(ステップST260)。ここで、新たな仮交差点が登録されていないことが判断されると、処理は終了する。
【0212】
ステップST260において、新たな仮交差点が登録されたことが判断されると、次いで、一時記憶メモリ18に交差点状況の受信計画が記憶されているかどうかが調べられる(ステップST261)。ここで、交差点状況の受信計画が記憶されていることが判断されると、次いで、一時記憶メモリ18に記憶されている受信計画の中に、新たに登録された仮交差点を含むメッシュに該当する受信計画が含まれているかどうかが調べられる(ステップST262)。
【0213】
このステップST262で、該当する受信計画が含まれていないことが判断されると、処理は終了する。一方、該当する受信計画が含まれていることが判断されると、放送局が放送するメッシュ単位の交差点状況配信計画が受信される(ステップST263)。次いで、受信された配信計画から、新たに登録された仮交差点を含むメッシュの交差点状況配信時刻が検索され、一時記憶メモリ18に記憶されている受信計画に、当該メッシュの受信計画が追加される(ステップST264)。その後、処理は終了する。上記ステップST261において、交差点状況の受信計画が記憶されていることが判断された場合は、シーケンスはステップST263に進む。この場合は、受信計画自体が一時記憶メモリ18の内部に新規に作成される。
【0214】
次に、受信計画に基づいて交差点状況を受信し、仮交差点の設定を行う処理を、図44に示すフローチャートを参照しながら説明する。この処理では、まず、受信計画が一時記憶メモリ18に記憶されているか否かが調べられる(ステップST270)。ここで、受信計画が記憶されていないことが判断されると、処理は終了する。一方、受信計画が記憶されていることが判断されると、タイマの確認が行われる(ステップST271)。次いで、タイマが受信計画に記録された時刻であるか否かが調べられる(ステップST272)。ここで、受信計画に記録された時刻でないことが判断されると、シーケンスはステップST271に戻り、再度、タイマの確認が行われる。
【0215】
上記ステップST272において、受信計画に記録された時刻であることが判断されると、次いで、該当するメッシュの交差点状況が受信される(ステップST273)。次いで、当該メッシュ内に交差点状況が未確認である仮交差点が残っているかどうかが調べられる(ステップST274)。ここで、未確認である仮交差点が残っていないことが判断されると、次いで、一時記憶メモリ18に記憶されている受信計画から、当該メッシュに該当する交差点状況の受信計画が削除される(ステップST275)。なお、受信計画の中が空になった場合は、受信計画自体が一時記憶メモリ18から削除される。その後、シーケンスはステップST270に戻る。
【0216】
上記ステップST274において、未確認である仮交差点が残っていないことが判断されると、以下、ステップST276〜ST281の処理が実行される。これらステップST276〜ST281の処理は、実施の形態13に係る地図情報処理装置において、図42のフローチャートに示したステップST254〜ST259の処理とそれぞれ同じであるので説明を省略する。
【0217】
以上説明したように、この発明の実施の形態14に係る地図情報処理装置によれば、外部からの放送を受信することにより取得した情報に基づいて平面交差と立体交差を区別できる。この場合、受信計画を作成し、この作成された受信計画に従って、放送から平面交差と立体交差を区別するための情報を取得するように構成したので、放送の有無を常時調べる必要がない。したがって、処理効率を向上させることができる。
【0218】
なお、上述した実施の形態14に係る地図情報処理装置では、道路情報更新手段24によって新たな仮交差点が登録されたときに、受信計画の作成を行うように構成したが、地図情報処理装置の起動時に受信計画の作成を行うように構成することもできる。
【0219】
実施の形態15.
この発明の実施の形態15に係る地図情報処理装置は、仮交差点を検出する以前に、仮交差点の存在を予見し、未登録高架下情報として保持しておくことにより、仮交差点が生成された時に、立体交差であるかどうかを判断するようにしたものである。
【0220】
図45は、この発明の実施の形態15に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図25に示した実施の形態7に係る地図情報処理装置のカーナビゲーション装置に高架下通過検出手段32と未登録高架下通過判定手段36が追加されて構成されている。また、HDD16の内部に未登録高架下情報記憶手段16dが追加されている。また、交差点決定手段23の動作が実施の形態7に係る地図情報処理装置のそれと異なる。
【0221】
映像信号処理手段27は、撮影装置47によって撮影することにより得られた画像信号を、カーナビゲーション装置内の各部で処理できるデータに変換する。高架下通過検出手段32は、映像信号処理手段27によって生成された画像から、現在走行中の道路を横切る高架構造物(高架道路、高架鉄道など)を検出する。また、未登録高架下通過判定手段36は、未登録の高架構造物の下を通過したかどうかを判定する。この未登録高架下通過判定手段36の詳細は後述する。
【0222】
次に、この発明の実施の形態15に係る地図情報処理装置の動作を説明する。図47は、撮影装置47を用いて未登録高架下情報を作成する動作を示すフローチャートである。図48は、図47における未登録高架下通過判定処理の詳細を示すフローチャートである。
【0223】
まず、図46に示すフローチャートを参照しながら、地図情報処理装置の動作を説明する。まず、移動体(車両)の上方が撮影装置47によって撮影される(ステップST290)。映像信号処理手段27は、撮影装置47からの信号に基づき画像を生成する。次いで、映像信号処理手段27によって生成された画像に基づき高架構造物が有るかどうかが調べられる(ステップST291)。即ち、高架下通過検出手段32は、映像信号処理手段27によって生成された画像から、現在走行中の道路を横切る高架構造物(高架道路、高架鉄道など)があるかどうかを調べる。このステップST291で、高架構造物がないことが判断されると、シーケンスはステップST290に戻る。
【0224】
上記ステップST291において、高架構造物があることが判断されると、次いで、未登録高架下通過判定手段36によって、未登録高架下通過判定処理が行われる(ステップST292)。この未登録高架下通過判定処理の詳細は後述する。次いで、終了信号を受信したかどうかが調べられる(ステップST293)。ここで、終了シーケンスを受信したことが判断されると、処理は終了する。一方、終了信号を受信していないことが判断されると、シーケンスはステップST290に戻り、再度、上方の撮影が行われる。
【0225】
図47は、図46のステップST292で実行される未登録高架下通過判定処理の詳細を示すフローチャートである。この未登録高架下通過判定処理は、高架下通過検出手段32により実行される。
【0226】
未登録高架下通過判定処理では、まず、現在位置を含むメッシュに該当する地図情報がHDD16の内部の地図情報記憶手段16aに存在するか否かが調べられる(ステップST300)。ここで、存在しないことが判断されると、シーケンスはステップST303に進む。一方、存在することが判断されると、次いで、該当する地図情報が一時記憶メモリ18に読み出される(ステップST301)。次いで、読み出された地図情報から当該地点を通過する道路情報が取得される(ステップST302)。
【0227】
次いで、現在位置を含むメッシュに該当する新規道路情報がHDD16内の新規道路情報記憶手段16bに存在するかどうかが調べられる(ステップST303)。ここで、存在しないことが判断されると、シーケンスはステップST306に進む。一方、存在することが判断されると、次いで、該当する新規道路情報が一時記憶メモリ18に読み出される(ステップST304)。次いで、読み出された新規道路情報から当該地点を通過する道路情報が取得される(ステップST305)。
【0228】
次いで、ステップST302で取得された道路情報とステップST305で取得された道路情報から、当該地点における高架構造物状況が算出される(ステップST306)。次いで、ステップST306における算出結果に基づき、その構造物が高架であるかどうかが調べられる(ステップST307)。ここで、高架であることが判断されると、処理は終了する。一方、高架でないことが判断されると、当該地点についHDD16の地図情報記憶手段16aに記憶されている地図情報および新規道路情報記憶手段16bに記憶されている新規道路情報には含まれていない高架構造物の存在を示す未登録高架下情報が作成され、HDD16の未登録高架下情報記憶手段16dに記憶される(ステップST308)。その後、処理は終了する。
【0229】
次に、この発明の実施の形態15に係る地図情報処理装置の交差点決定手段23において行われる、未登録高架下情報を利用して仮交差点の状態を設定する処理を、図48に示すフローチャートを参照しながら説明する。
【0230】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST310)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、HDD16の未登録高架下情報記憶手段16dに記憶されている未登録高架下情報から当該地点の情報が検索される(ステップST311)。次いで、ステップST311における検索結果に基づき、当該地点の情報が存在するかどうかが調べられる(ステップST312)。
【0231】
このステップST312で、当該地点の情報が存在しないことが判断されると、処理は終了する。一方、当該地点の情報が存在することが判断され、その情報が立体交差を示していれば、仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST313)。次いで、当該仮交差点における仮交差点フラグがOFFに変更される(ステップST314)。その後、処理は終了する。
【0232】
以上説明したように、この発明の実施の形態15に係る地図情報処理装置によれば、地図情報記憶手段16aや新規道路情報記憶手段16bに記憶されていない新規道路が既存道路を高架で横切っていることを検出しておくことにより、仮交差点を自動的に立体交差と判断できる。
【0233】
実施の形態16.
この発明の実施の形態16に係る地図情報処理装置は、高度情報に基づいて仮交差点の登録の要否を判断するようにしたものである。
【0234】
この実施の形態16に係る地図情報処理装置の構成は、以下の点を除き、図1に示した実施の形態1に係る地図情報処理装置のそれと同じである。即ち、地図情報記憶手段16aに記憶される地図情報に含まれる道路情報は、ノードに関連付けられた情報として、そのノードの高度情報を予め含んでいる。また、新規道路情報記憶手段16bに記憶される新規道路情報には、ノードに関連付けられた情報として、そのノードの高度情報が含まれる。この高度情報は、測位手段15がGPS受信アンテナ45から得られるGPS信号に基づいて生成される。
【0235】
また、交差判定手段20は、高度情報を用いて平面交差点か立体交差かの判定を行う。また、道路更新情報生成手段21は、仮交差点を生成しない。交差判定手段20が判定した交差地点は全て平面交差点とする。また、この地図情報処理装置では、仮交差点がないので、ユーザに問い合わせることはない。したがって、実施の形態1に係る地図情報処理装置における交差点問合せ手段22は存在しない。さらに、測位手段15は高さを含めた3次元測位を行う。
【0236】
次に、この発明の実施の形態16に係る地図情報処理装置の交差判定手段20において行われる交差判定処理を、図49に示すフローチャートを参照しながら説明する。
【0237】
図49のフローチャートに示す交差判定処理のステップST320〜ST327の処理は、図5のフローチャートに示す実施の形態1に係る地図情報処理装置における交差判定処理のステップST40〜ST47の処理とそれぞれ同じである。したがって、以下では、相違する部分についてのみ説明する。
【0238】
ステップST327において、選択された線分と選択された近傍道路とが交差していることが判断されると、次いで、交差地点における選択線分の高さが算出される(ステップST328)。交差地点の高さは、選択された線分の両端における高さに基づき、両端からの距離の比で算出される。次いで、交差地点における選択された線分と交差する近傍道路の高さが算出される(ステップST329)。この交差地点の高さは、近傍道路の両端における高さに基づき、両端からの距離の比で算出される。
【0239】
次いで、ステップST328で算出された高さとステップST329で算出された高さの差が予め定められた一定値以上であるかどうかが調べられる(ステップST330)。ここで、一定値以上でないことが判断されると、交差情報が一時記憶メモリ18に一時記憶される(ステップST331)。その後、シーケンスはステップST321に戻る。一方、ステップST330において、一定値以上であることが判断されると、その交差地点は立体交差であると認識され、交差点情報を作成することなく、シーケンスはステップST321に戻る。
【0240】
以上説明したように、この発明の実施の形態16に係る地図情報処理装置によれば、新規道路を検出中に高度情報によって立体交差であることが判断されると交差情報を格納しないので、不要な仮交差点の発生を抑制することができる。
【0241】
実施の形態17.
この発明の実施の形態17に係る地図情報処理装置は、撮影装置で撮影することにより得られた画像情報に基づいて仮交差点の登録の要否を判断するようにしたものである。
【0242】
この実施の形態17に係る地図情報処理装置の構成は、以下の点を除き、図25に示した実施の形態7に係る地図情報処理装置のそれと同じである。即ち、道路更新情報生成手段21では、仮交差点は生成されない。交差判定手段20が判定した交差地点は全て平面交差点とする。また、この地図情報処理装置では、仮交差点がないので、ユーザに問い合わせることはない。したがって、実施の形態1に係る地図情報処理装置における交差点問合せ手段22は存在しない。
【0243】
次に、この発明の実施の形態17に係る地図情報処理装置の交差判定手段20において行われる交差判定処理を、図50に示すフローチャートを参照しながら説明する。
【0244】
図50のフローチャートに示す交差判定処理のステップST340〜ST347の処理は、図5のフローチャートに示す実施の形態1に係る地図情報処理装置における交差判定処理のステップST40〜ST47の処理とそれぞれ同じである。したがって、以下では、相違する部分についてのみ説明する。
【0245】
ステップST347において、選択された線分と選択された近傍道路とが交差していることが判断されると、撮影装置47で撮影することにより得られた画像が処理されることにより、当該地点が立体交差か平面交差点かが算出される(ステップST348)。次いで、ステップST348における画像処理の結果に基づき、当該交差地点は立体交差であるかどうかが調べられる(ステップST349)。ここで、立体交差でない(平面交差である)ことが判断されると、交差情報が作成されて一時記憶メモリ18に一時記憶される(ステップST350)。その後、シーケンスはステップST341に戻る。一方、ステップST349において、立体交差であることが判断されると、交差点情報が作成されることなく、シーケンスはステップST341に戻る。
【0246】
以上説明したように、この発明の実施の形態17に係る地図情報処理装置によれば、新規道路を検出中にカメラ画像によって立体交差であることが判断されると交差情報を格納しないので、不要な仮交差点の発生を抑制することができる。
【0247】
実施の形態18.
この発明の実施の形態18に係る地図情報処理装置は、有料道路を走行することにより得られた情報に基づいて仮交差点の登録の要否を判断するようにしたものである。
【0248】
この実施の形態18に係る地図情報処理装置の構成は、以下の点を除き、図27に示した実施の形態8に係る地図情報処理装置のそれと同じである。即ち、この実施の形態18に係る地図情報処理装置では、交差点問合せ手段22が除去されている。
【0249】
次に、この発明の実施の形態18に係る地図情報処理装置の交差判定手段20において行われる交差判定処理を、図51に示すフローチャートを参照しながら説明する。
【0250】
図51のフローチャートに示す交差判定処理のステップST360〜ST367の処理は、図5のフローチャートに示す実施の形態1に係る地図情報処理装置における交差判定処理のステップST40〜ST47の処理とそれぞれ同じである。したがって、以下では、相違する部分についてのみ説明する。
【0251】
ステップST367において、選択された線分と選択された近傍道路とが交差していることが判断されると、次いで、一時記憶メモリ18から有料道路走行中情報を取得できるかどうかが調べられる(ステップST368)。ここで、有料道路走行中情報を取得できることが判断されると、有料道路走行中であり、当該地点は立体交差と認識され、交差情報が生成することなく、シーケンスはステップST361に戻る。
【0252】
ステップST368において、有料道路走行中情報を取得できないことが判断されると、次いで、仮交差点道路種別判定手段30による交差道路種別判定処理が行われる(ステップST369)。この交差道路種別判定処理の詳細は、実施の形態8において、図31のフローチャートを参照して既に説明した。次いで、ステップST369における判定結果に基づいて、当該地点で新規道路と交差する既存道路の道路種別が有料道路であるか否かが調べられる(ステップST370)。
【0253】
このステップST370で、有料道路であることが判断されると、当該地点は立体交差と認識され、交差点情報が作成されることなく、シーケンスはステップST361に戻る。一方、ステップST370において、有料道路でないことが判断されると、平面交差点であることが認識され、交差情報が作成されて一時記憶メモリ18に一時記憶される(ステップST371)。その後、シーケンスはステップST361に戻る。
【0254】
以上説明したように、この発明の実施の形態18に係る地図情報処理装置によれば、新規道路が検出されたときに、不要な仮交差点の発生を抑制することができる。
【0255】
実施の形態19.
この発明の実施の形態19に係る地図情報処理装置は、高架下を走行したという情報に基づいて仮交差点の登録の要否を判断するようにしたものである。
【0256】
この実施の形態19に係る地図情報処理装置の構成は、以下の点を除き、図32に示した実施の形態9に係る地図情報処理装置のそれと同じである。即ち、新規道路検出手段19は、測位手段15によって測位された位置から走行履歴を生成する際に、照度計測手段31によって測定された当該地点での照度を走行履歴に含める。
【0257】
次に、この発明の実施の形態19に係る地図情報処理装置の交差判定手段20において行われる交差判定処理を、図52および図53に示すフローチャートを参照しながら説明する。
【0258】
図52のフローチャートに示す交差判定処理のステップST380〜ST387の処理は、図5のフローチャートに示す実施の形態1に係る地図情報処理装置における交差判定処理のステップST40〜ST47の処理とそれぞれ同じである。したがって、以下では、相違する部分についてのみ説明する。
【0259】
ステップST387において、選択された線分と選択された近傍道路とが交差していることが判断されると、次いで、高架下通過検出手段32による高架構造物検出処理が行われる(ステップST388)。この高架構造物検出処理の詳細は後述する。次いで、ステップST388における高架構造物検出処理の結果に基づいて、交差地点に高架構造物があるかどうかが調べられる(ステップST389)。ここで、交差地点に高架構造物があることが判断されると、シーケンスはステップST381に戻る。一方、ステップST389において、交差地点に高架構造物がないことが判断されると、平面交差点であることが認識され、交差情報が作成されて一時記憶メモリ18に一時記憶される(ステップST390)。その後、シーケンスはステップST381に戻る。
【0260】
次に、上記ステップST388で行われる高架構造物検出処理の詳細を、図53に示すフローチャートを参照しながら説明する。
【0261】
高架構造物検出処理では、まず、走行履歴の中から当該交差地点直前の照度情報が取得される(ステップST400)。次いで、走行履歴の中から当該交差地点における照度情報が取得される(ステップST401)。次いで、走行履歴の中から当該交差地点直後の照度情報が取得される(ステップST402)。次いで、交差地点の照度が直前照度から急激に減少しているか否かが調べられる(ステップST403)。ここで、急激に減少していないことが判断されると、シーケンスはステップST406に進み、交差地点を横切る高架構造物は存在しないと判断される。
【0262】
一方、ステップST403において、急激に減少していることが判断されると、次いで、直後照度が直前照度とほぼ同程度であるか否かが調べられる(ステップST404)。ここで、同程度でないことが判断されると、シーケンスはステップST406に進み、交差地点を横切る高架構造物はないと判断される。一方、ステップST404において、同程度であることが判断されると、シーケンスはステップST405に進み、交差地点を横切る高架構造物が存在すると判断される。
【0263】
以上説明したように、この発明の実施の形態19に係る地図情報処理装置によれば、新規道路を検出中に照度の変化によって高架をくぐったことを判断し、不要な仮交差点の発生を抑制することができる。
【0264】
実施の形態20.
この発明の実施の形態20に係る地図情報処理装置は、GPS衛星および準天頂衛星の捕捉の可否に基づいて仮交差点の登録の要否を判断するようにしたものである。
【0265】
この実施の形態20に係る地図情報処理装置の構成は、以下の点を除き、図35に示した実施の形態10に係る地図情報処理装置のそれと同じである。即ち、新規道路検出手段19は、測位手段15によって測位された位置から走行履歴を生成する際に、捕捉衛星検出手段33によって検出された捕捉衛星の情報を走行履歴に含める。具体的には、当該位置において捕捉できた衛星を特定するID情報とその方向を走行履歴に含める。
【0266】
次に、この発明の実施の形態20に係る地図情報処理装置の交差判定手段20において行われる交差判定処理を、図54に示すフローチャートを参照しながら説明する。
【0267】
この実施の形態20に係る地図情報処理装置の交差判定手段20で行われる処理は、高架構造物検出処理(図52のステップST388)の処理内容を除き、図52のフローチャートに示した実施の形態19に係る地図情報処理装置のそれと同じである。したがって、以下では、高架構造物検出処理についてのみ説明する。
【0268】
図54のフローチャートに示す高架構造物検出処理では、まず、走行履歴の中から当該交差地点直前の衛星情報が取得される(ステップST410)。次いで、走行履歴の中から当該交差地点における衛星情報が取得される(ステップST411)。次いで、走行履歴の中から当該交差地点直後の衛星情報が取得される(ステップST412)。次いで、一時記憶メモリ18に記憶されている直前衛星情報が参照され、その中に準天頂衛星が捕捉されている情報があるかどうかが調べられる(ステップST413)。このステップST413において、準天頂衛星が捕捉されている情報があることが判断されると、次いで、一時記憶メモリ18に記憶されている交差点衛星情報が参照され、その中に準天頂衛星が補足されている情報があるかどうかが調べられる(ステップST414)。
【0269】
このステップST414において、準天頂衛星が補足されている情報がないことが判断されると、一時記憶メモリ18に記憶されている直後衛星情報が参照され、その中に準天頂衛星が補足されている情報があるかどうかが調べられる(ステップST415)。このステップST415において、準天頂衛星が補足されている情報があることが判断されると、シーケンスはステップST416に進み、交差地点を横切る高架構造物があると判断される。
【0270】
上記ステップST413において準天頂衛星が捕捉されている情報がないことが判断された場合、または上記ステップST414において準天頂衛星が捕捉されている情報があることが判断された場合、または上記ステップST415において準天頂衛星が捕捉されている情報がないことが判断された場合、直前衛星情報が参照され、天頂付近(予め天頂付近の範囲を定めておく。例えば、仰角75度以上など)で捕捉されているGPS衛星が抽出される(ステップST417)。次いで、一時記憶メモリ18に記憶されている交差点衛星情報が参照され、ステップST417において抽出された全てのGPS衛星が交差点衛星情報の中で捕捉されていないかどうかが調べられる(ステップST418)。ここで、ステップST417で抽出された全てのGPS衛星が交差点衛星情報で補足できていないことが判断されると、それらの抽出されたGPS衛星が、一時記憶メモリ18に記憶されている直後衛星情報の中で捕捉されているかどうかが調べられる(ステップST419)。
【0271】
このステップST419において、全ての衛星が捕捉されていることが判断されると、シーケンスはステップST416に進み、交差地点を横切る高架構造物があると判断される。一方、ステップST419において、全ての衛星が捕捉されていないことが判断されると、シーケンスはステップST420に進み、交差地点を横切る高架構造物は存在しないと判断される。
【0272】
以上説明したように、この発明の実施の形態20に係る地図情報処理装置によれば、新規道路を検出中に捕捉できる衛星の変化によって高架をくぐったことを判断し、不要な仮交差点の発生を抑制することができる。
【0273】
実施の形態21.
この発明の実施の形態21に係る地図情報処理装置は、予め記憶された高架下を走行したという情報に基づいて仮交差点の登録の要否を判断するようにしたものである。
【0274】
この実施の形態21に係る地図情報処理装置の構成は、図45に示した実施の形態15に係る地図情報処理装置のそれと同じである。
【0275】
次に、この発明の実施の形態21に係る地図情報処理装置の動作を説明する。この地図情報処理装置の交差判定手段20において行われる交差判定処理は、高架構造物検出処理(ステップST388)の処理内容を除き、図52のフローチャートに示した処理と同じである。したがって、以下では、高架構造物検出処理の詳細のみを、図55に示すフローチャートを参照しながら説明する。
【0276】
高架構造物検出処理では、まず、HDD16の未登録高架下情報記憶手段16dに記憶されている未登録高架下情報が読み出される(ステップST430)。次いで、ステップST430において読み出された未登録高架下情報から、当該交差地点に該当する情報が検索される(ステップST431)。そして、該当する情報が存在するかどうかが調べられる(ステップST432)。ここで、該当する情報が存在することが判断されるとシーケンスはステップST433に進み、交差地点を横切る高架構造物があると判断される。一方、該当する情報が存在しないことが判断されるとシーケンスはステップST434に進み、交差地点を横切る高架構造物は存在しないと判断される。
【0277】
以上説明したように、この発明の実施の形態21に係る地図情報処理装置によれば、地図情報記憶手段16aや新規道路情報記憶手段16bに記憶されていない新規道路が既存道路を高架で横切っていることを検出しておくことで、不要な仮交差点の発生を抑制できる。
【0278】
実施の形態22.
この発明の実施の形態22に係る地図情報処理装置は、複数のメッシュにまたがる新規道路が検出された場合に対応できるようにしたものである。
【0279】
図56は、この発明の実施の形態22に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置のカーナビゲーション装置にメッシュ移動検出手段37が追加されて構成されている。
【0280】
メッシュ移動検出手段37は、この発明の地図領域移動検出手段に対応し、現在自己が位置しているメッシュを把握し、測位手段15が測位する位置が、把握しているメッシュから隣接するメッシュへ移動したことを検出する。この時、隣接するメッシュを特定するための情報も生成する。
【0281】
次に、この発明の実施の形態22に係る地図情報処理装置の動作を、図57に示すように、メッシュM1の既存道路リンクL10上にある地点P20において逸脱し、メッシュM1と隣接するメッシュM2の既存道路リンクL11上にある地点P30に合流するように走行した場合を例に挙げて説明する。
【0282】
新規道路検出手段19によってP20における逸脱が検出され、走行履歴が蓄積されている状況において、メッシュ移動検出手段37は、測位結果とメッシュM1の領域との比較を行う。この比較の結果、測位結果がメッシュM1から外れると、その外れた方向から移動先のメッシュM2を特定する。このとき、走行履歴としての位置情報の蓄積を一時中止し、メッシュ領域から外れた地点P21を境界端点として走行履歴に記録する。そして、地点P20から地点P21をメッシュM1における新規道路とする。
【0283】
次に、処理を隣のメッシュM2に移し、メッシュM1中の地点P21に該当する地点に境界端点P31を発生させる。そして、地点P30における合流を検知するまで再び走行履歴の蓄積を行う。合流が検知されると、地点P31から地点P30までを、メッシュM2における新規道路とする。
【0284】
道路更新情報生成手段21は、新規道路検出手段19によって生成されたメッシュ単位の走行履歴に基づいて道路更新情報を生成する。すなわち、地点P20と地点P21との間を1つのリンクとし、地点P31と地点P30との間を別の1つのリンクとする。
【0285】
以上説明したように、この発明の実施の形態22に係る地図情報処理装置によれば、複数メッシュにまたがる新規道路を検出した際に、メッシュ単位で区切られた地図情報に対して新規道路を追加することができる。
【0286】
実施の形態23.
この発明の実施の形態23に係る地図情報処理装置は、新規道路および仮交差点を通常の道路および交差点とは異なる形態で出力(表示、音声案内)するようにしたものである。
【0287】
この実施の形態23に係る地図情報処理装置の構成は、図1に示した実施の形態1に係る地図情報処理装置のそれと同じである。
【0288】
図58は、この実施の形態23に係る地図情報処理装置における表示装置40への表示例を示す。表示地図計算手段10は、地図情報および新規道路情報から表示用の地図画像を生成する際に、地図情報に含まれる道路と新規道路情報に含まれる道路とを異なる形態、例えば、線の太さや色を変えたり、文字列で新規道路を示すといった形態で表示する。また、生成される地図画像の範囲に仮交差点が存在する場合、その仮交差点の位置に、ユーザが通常の交差点表示とは異なっていることを容易に認識できるように、特別なマーキングを施して仮交差点が存在することを表示する。
【0289】
また、自己が仮交差点に接続している道路を走行中に、仮交差点までの距離が予め定められた距離になったときに、前方交差点が平面交差点か立体交差かが不明な交差点であることを音声で案内する。
【0290】
以上説明したように、この発明の実施の形態23に係る地図情報処理装置によれば、通常の平面交差点か立体交差かが不明な仮交差点を強調して示すことができる。また、新規道路を強調してユーザに示すことができる。
【0291】
実施の形態24.
この発明の実施の形態24に係る地図情報処理装置は、実施の形態3に加えて、仮交差点が平面交差点か立体交差点かを、自車位置の高さ方向の移動変分を利用して決定するようにしたものである。
【0292】
図59は、この実施の形態24に係る地図情報処理装置の構成を示すブロック図である。図59において、実施の形態3で説明に使用した図19中のブロックと同一のブロックは、基本的に実施の形態3と同様の動作を行なう。但し、以下に示すブロックは異なる動作を行なう。
【0293】
加速度センサ55は、高さ方向を含む3次元の加速度を検出する。なお、図19では、同ブロックの代わりに2次元の角速度センサを使用していた。
測位手段15は、加速度センサ55が検出する3次元加速度を利用して、高さ方向の移動変分を含んだ自車位置を計測する。
【0294】
道路更新情報生成手段21は、新規道路の各座標点に、それぞれの地点における情報として、2次元座標以外に高さ方向の移動変分を追加する。また、生成する仮交差点では、通行規制の初期値として、直進方向を除くその他の全方向を通行不可とする。
交差点決定手段23は、右左折情報に加えて、高さ方向の移動変分の情報も利用する。
【0295】
図60は、この発明の実施の形態24に係る地図情報処理装置において、新規道路の検出を説明するための図である。図60のように、新規道路検出手段19が、既存道路ML1を横切るように新規道路ML2を検出した場合、道路更新情報生成手段21は、それらの2次元交差地点N1が表面交差点か立体交差点か不明なため、図60に示すように、N1に仮交差点を発生させ、直進方向以外の右左折を全て通行不可として新規道路を生成する。またこの時に、新規道路情報には検出方向(ここではP1からQ1に向かって検出したものとする)に従って、新規道路ML2の高さ方向の移動変分も、「高度変化情報」として含むものとする。上記の場合の高さ方向の移動変分をδ1とする。
【0296】
図61は、この発明の実施の形態24に係る地図情報処理装置において、図60の新規道路と既存道路との立体交差を示す図である。前述の新規道路ML2の状況が、実際には図61に示されるような立体交差であった場合を想定する。新規道路ML2は、前述のように新規道路情報記憶手段16bに記憶されているものとする。
【0297】
再び交差点N1付近をP1から進入し、T1で新規道路ML2の高架から側道へ逸れ、側道を下って既存道路ML1との丁字路U1で右折しS1方向へ進んだ場合の高さ方向の移動変分をδ2とする。新規道路ML2における右折直前、即ちP1から仮交差点N1へ至る間の高度変化情報(高さ方向の移動変分δ1)と、今回の走行における右折直前、即ちP1からT1を経由して丁字路U1へ至る間の高さ方向の移動変分(高さ方向の移動変分δ2)は一致しない。
【0298】
図62は、この発明の実施の形態24に係る地図情報処理装置において、図60の新規道路と既存道路との仮交差点を判定する動作を説明するための図である。前述の場合には、交差点決定手段23は、新規道路ML2は既存道路ML1と立体交差している、即ち、仮交差点N1は立体交差点であると判定する。そして、図62に示す道路情報を構築し、図59の地図情報記憶手段16aおよび新規道路情報記憶手段16bに記憶する。
【0299】
一方で、図60のように検出した新規道路ML2と既存道路ML1が、仮交差点N1において通常の平面交差点を形成している場合について説明する。仮交差点N1が平面交差点であれば、右左折する場合でも直進する場合でも、仮交差点N1進入直前の高さ方向の移動変分は高度変化情報と一致する。従って、交差点決定手段23は、仮交差点N1を通常の平面交差点として判定し、同交差点における通行規制を全方位、または、当該進入道路および脱出道路の組合せについて通行可に変更する。
【0300】
図63は、この発明の実施の形態24に係る地図情報処理装置において、新規道路の検出を説明するための図である。図63のように、新規道路検出手段19が、既存道路ML3を横切るように新規道路ML4を検出した場合、道路更新情報生成手段21は、それらの2次元交差地点N2が表面交差点か立体交差点か不明なため、図63に示すように、N2に仮交差点を発生させ、直進方向以外の右左折を全て通行不可として新規道路を生成する。またこの時に、新規道路情報には検出方向(ここではP2からQ2に向かって検出したものとする)に従って、新規道路ML4の高さ方向の移動変分も、「高度変化情報」として含むものとする。この場合の高さ方向の移動変分をδ3とする。
【0301】
図64は、この発明の実施の形態24に係る地図情報処理装置において、図63の新規道路と既存道路との立体交差を示す図である。前述の新規道路ML4の状況が、実際には図64に示されるような立体交差であった場合を想定する。図63に示す新規道路ML4は、前述のように新規道路情報記憶手段16bに記憶されているものとする。
【0302】
再びこの仮交差点N2付近を、R2から進入し、丁字路U2で既存道路ML3から左折して側道へ逸れ、側道を上って、T2で新規道路ML4に合流しQ2方向へ進んだ場合の高さ方向の移動変分をδ4とする。新規道路ML4における仮交差点N2からQ2へ至る間の高度変化情報(高さ方向の移動変分δ3)と、今回の走行における左折直後、即ち丁字路U2からT2を経由してQ2へと至る間の高さ方向の移動変分δ4は一致しない。
【0303】
図65は、この発明の実施の形態24に係る地図情報処理装置において、図63の新規道路と既存道路との仮交差点を判定する動作を説明するための図である。前述の場合には、交差点決定手段23は、新規道路ML4は既存道路ML3と立体交差している、即ち、仮交差点N2は立体交差点であると判定する。そして、図65に示す道路情報を構築し、図59の地図情報記憶手段16aおよび新規道路情報記憶手段16bに記憶する。
【0304】
なお、仮交差点N2が平面交差点である場合には、右左折する場合でも直進する場合でも、交差点脱出直後の高さ方向の移動変分は高度変化情報と一致する。従って、仮交差点N2を平面交差点として判定し、同交差点における通行規制を全方位、または、当該進入道路および脱出道路の組合せについて通行可に変更する。
【0305】
次に、この発明の実施の形態24に係る地図情報処理装置の交差点決定手段23において行われる、仮交差点の状態を設定する処理を、図66に示すフローチャートを参照しながら説明する。なお、図66中で「進入&脱出の組」とは、「進入道路から仮交差点へ侵入し、脱出道路を通って仮交差点から脱出する走行経路の通行規制」のことである。
【0306】
先ず、ステップST440では、仮交差点において、右左折検出手段26が右左折を検出した場合にはステップST441へ進み、右左折を検出しなかった場合には処理は終了する。
ステップST441では、当該仮交差点の立体構造属性を参照し、当該仮交差点が立体交差構造であればステップST442へ進み、そうでなければステップST443へ進む。なお、仮交差点が生成された時点では、その立体構造属性は「平面交差点」と設定される。平面交差点と設定された場合の処理は、図20のステップST92(実施の形態3)と同様である。
ステップST442では、当該交差点の通行規制情報を参照し、当該右左折走行で、当該仮交差点に進入した道路をTL1、当該仮交差点から脱出した道路をTL2とし、当該仮交差点においてTL1から進入し、TL2から脱出する走行経路の通行規制が通行可であれば処理を終了し、そうでなければステップST451へ進む。ステップST451の処理については後述する。
【0307】
ステップST443では、当該仮交差点においてTL1から進入し、TL2から脱出する走行経路の通行規制が通行可であれば処理を終了し、そうでなければステップST444へ進む。
ステップST444では、当該仮交差点においてTL1から進入し、TL2から脱出する走行経路の通行規制以外の、他の走行経路の通行規制中に通行可のものがあればステップST445へ進み、そうでなければステップST448へ進む。ステップST448の処理については後述する。
【0308】
ステップST445では、ステップST444で通行可であった他の走行経路の通行規制を、当該交差点における走行経路の通行規制として、その通行規制情報を「通行可」に変更し、ステップST446へ進む。
ステップST446では、当該仮交差点における残り全ての走行経路の通行規制が通行可であれば、ステップST447へ進み、そうでなければ処理を終了する。
ステップST447では、仮交差点フラグをOFFに設定して終了する。
【0309】
続いて、前述のステップST448へ戻って説明する。ステップST448では、仮交差点進入直前(ステップST440)の高さ方向移動変分の履歴が、交差点進入道路の高さ方向移動変分の状況(高度変化情報)と一致すればステップST449へ進み、一致しなければステップST450へ進む(図60〜62参照)。なお、交差点進入道路の高度変化情報については、図59の地図情報記憶手段16aまたは新規道路情報記憶手段16bを参照する。
【0310】
ステップST449では、仮交差点脱出直後(ステップST440)の高さ方向移動変分の履歴が、交差点脱出道路の高さ方向移動変分の状況(高度変化情報)と一致すればステップST445へ進み、そうでなければステップST450へ進む(図63〜65参照)。ステップST445〜447の処理については前述の通りである。なお、交差点脱出道路の高度変化情報は、図59の地図情報記憶手段16aまたは新規道路情報記憶手段16bを参照する。
【0311】
ステップST450では、当該仮交差点の構造を立体交差構造に変更すると共に、立体構造属性を「立体交差」に変更してステップST451へ進む。
ステップST451では、当該仮交差点においてTL1から進入しTL2から脱出する走行経路の通行規制(ステップST440)を「通行可」に変更し、道路情報を構築して地図情報記憶手段16aおよび新規道路情報記憶手段16bに記憶する。そして、ステップST452へ進む。
ステップST452では、残り全ての走行経路の通行規制が通行可であればステップST453へ進み、そうでなければ処理を終了する。
ステップST453では、仮交差点フラグをOFFに設定して処理を終了する。
【0312】
なお、実施の形態24では、図61でML1が新規道路、ML2が既存道路となる場合でも等しい効果が得られる。また、図64でML3が新規道路、ML4が既存道路となる場合も同様である。
【0313】
以上説明したように、この発明の実施の形態24に係る地図情報処理装置によれば、平面交差点か立体交差点かの判定をより正確に(現状に合うように)行なうことが出来る。
また、その結果、平面交差点か立体交差点かが不明な仮交差点を案内することが無いため、実際には立体交差点である既存道路と新規道路との交差地点を右左折するような経路をユーザに提示することを回避することができる。
【図面の簡単な説明】
【0314】
【図1】この発明の実施の形態1に係る地図情報処理装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係る地図情報処理装置の測位に関するメイン処理を示すフローチャートである。
【図3】図2のステップST15において行われる新規道路検出処理の詳細を示すフローチャートである。
【図4】図2のステップST15において行われる新規道路検出処理に続いて実行される処理を示すフローチャートである。
【図5】図4に示す交差判定処理の詳細を示すフローチャートである。
【図6】この発明の実施の形態24に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図7】図4に示す道路情報更新処理の詳細を示すフローチャートである。
【図8】この発明の実施の形態1に係る地図情報処理装置における新規道路の検出、生成および追加の動作を説明するための図である。
【図9】この発明の実施の形態1に係る地図情報処理装置において、走行軌跡を表す時系列データを一定時間毎に取得する動作を説明するための図である。
【図10】この発明の実施の形態1に係る地図情報処理装置において、走行軌跡を表す時系列データを一定距離毎に取得する動作を説明するための図である。
【図11】この発明の実施の形態1に係る地図情報処理装置において、走行軌跡を表す時系列データを方向変化が発生する毎に取得する動作を説明するための図である。
【図12】この発明の実施の形態1に係る地図情報処理装置において、新規道路が追加された後の道路ネットワークを説明するための図である。
【図13】この発明の実施の形態1に係る地図情報処理装置において使用される道路情報に記述される通行規制を説明するための図である。
【図14】この発明の実施の形態1に係る地図情報処理装置において、仮交差点に右左折が含まれる場合の表示例を示す図である。
【図15】この発明の実施の形態1に係る地図情報処理装置において、仮交差点に右左折が含まれない場合の表示例を示す図である。
【図16】この発明の実施の形態1に係る地図情報処理装置における交差点決定処理を示すフローチャートである。
【図17】この発明の実施の形態2に係る地図情報処理装置において、ユーザが仮交差点の状態を入力するための画面の例を示す図である。
【図18】この発明の実施の形態2に係る地図情報処理装置において、図17に示した画面の提示後に行われる交差点決定処理を示すフローチャートである。
【図19】この発明の実施の形態3に係る地図情報処理装置の構成を示すブロック図である。
【図20】この発明の実施の形態3に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図21】この発明の実施の形態4に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図22】この発明の実施の形態5に係る地図情報処理装置の構成を示すブロック図である。
【図23】この発明の実施の形態5に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図24】この発明の実施の形態6に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図25】この発明の実施の形態7に係る地図情報処理装置の構成を示すブロック図である。
【図26】この発明の実施の形態7に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図27】この発明の実施の形態8に係る地図情報処理装置の構成を示すブロック図である。
【図28】この発明の実施の形態8に係る地図情報処理装置の電源OFF時の終了処理を示すフローチャートである。
【図29】この発明の実施の形態8に係る地図情報処理装置の電源ON時の起動処理を示すフローチャートである。
【図30】この発明の実施の形態8に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図31】図30のステップST175で行われる交差道路種別判定処理の詳細を示すフローチャートである。
【図32】この発明の実施の形態9に係る地図情報処理装置の構成を示すブロック図である。
【図33】この発明の実施の形態9に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図34】図33のステップST193で行われる高架下通過判定処理の詳細を示すフローチャートである。
【図35】この発明の実施の形態10に係る地図情報処理装置の構成を示すブロック図である。
【図36】この発明の実施の形態10に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図37】図36のステップST217で行われる高架判定処理の詳細を示すフローチャートである。
【図38】この発明の実施の形態11に係る地図情報処理装置の構成を示すブロック図である。
【図39】この発明の実施の形態11に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図40】この発明の実施の形態12に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図41】この発明の実施の形態13に係る地図情報処理装置の構成を示すブロック図である。
【図42】この発明の実施の形態13に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図43】この発明の実施の形態14に係る地図情報処理装置において行われる交差点状況の受信計画を作成する処理を示すフローチャートである。
【図44】この発明の実施の形態14に係る地図情報処理装置において行われる受信計画に基づいて仮交差点の設定を行う処理を示すフローチャートである。
【図45】この発明の実施の形態15に係る地図情報処理装置の構成を示すブロック図である。
【図46】この発明の実施の形態15に係る地図情報処理装置において未登録高架下情報を作成する動作を示すフローチャートである。
【図47】図46のステップST292で行われる未登録高架下通過判定処理の詳細を示すフローチャートである。
【図48】この発明の実施の形態15に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図49】この発明の実施の形態16に係る地図情報処理装置において行われる交差判定処理を示すフローチャートである。
【図50】この発明の実施の形態17に係る地図情報処理装置において行われる交差判定処理を示すフローチャートである。
【図51】この発明の実施の形態18に係る地図情報処理装置において行われる交差判定処理を示すフローチャートである。
【図52】この発明の実施の形態19に係る地図情報処理装置において行われる交差判定処理を示すフローチャートである。
【図53】図52のステップST388で行われる高架構造物検出処理の詳細を示すフローチャートである。
【図54】この発明の実施の形態20に係る地図情報処理装置において行われる交差判定処理を示すフローチャートである。
【図55】この発明の実施の形態21に係る地図情報処理装置において行われる高架構造物検出処理の詳細を示すフローチャートである。
【図56】この発明の実施の形態22に係る地図情報処理装置の構成を示すブロック図である。
【図57】この発明の実施の形態22に係る地図情報処理装置の動作を説明するための図である。
【図58】この発明の実施の形態23に係る地図情報処理装置における表示装置への表示例を示す図である。
【図59】この発明の実施の形態24に係る地図情報処理装置の構成を示すブロック図である。
【図60】この発明の実施の形態24に係る地図情報処理装置において、新規道路の検出を説明するための図である。
【図61】この発明の実施の形態24に係る地図情報処理装置において、図60の新規道路と既存道路との立体交差を示す図である。
【図62】この発明の実施の形態24に係る地図情報処理装置において、図60の新規道路と既存道路との仮交差点を判定する動作を説明するための図である。
【図63】この発明の実施の形態24に係る地図情報処理装置において、新規道路の検出を説明するための図である。
【図64】この発明の実施の形態24に係る地図情報処理装置において、図63の新規道路と既存道路との立体交差を示す図である。
【図65】この発明の実施の形態24に係る地図情報処理装置において、図63の新規道路と既存道路との仮交差点を判定する動作を説明するための図である。
【図66】この発明の実施の形態24に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【符号の説明】
【0315】
10 表示地図計算手段、11 経路計算手段、12 表示制御手段、13 音声出力制御手段、14 入力受信手段、15 測位手段、16 HDD、16a 地図情報記憶手段、16b 新規道路情報記憶手段、16c 走行履歴情報記憶手段、16d 未登録高架下情報記憶手段、17 HDDアクセス手段、18 一時記憶メモリ、19 新規道路検出手段、20 交差判定手段、21 道路更新情報生成手段、22 交差点問合せ手段、23 交差点決定手段、24 道路情報更新手段、25 制御手段、26 右左折検出手段、27 映像信号処理手段、28 有料道路走行判定手段、29 バックアップRAM、30 仮交差点道路種別判定手段、31 照度計測手段、32 高架下通過検出手段、33 捕捉衛星検出手段、34 DSRC送受信手段、35 放送信号処理手段、36 未登録高架下通過判定手段、37 メッシュ移動検出手段、40 表示装置、41 音声出力装置、42 入力装置、43 車速センサ、44 角速度センサ、45 GPS受信アンテナ、46 方向指示器、47 撮影装置、48 ETC装置、49 ETCアンテナ、50 運転席側窓センサ、51 照度計、52 準天頂衛星受信アンテナ、53 DSRCアンテナ、54 放送受信アンテナ、55 加速度センサ。
【技術分野】
【0001】
この発明は、地図情報処理装置に関し、特に新規道路を検出して地図情報に組み込む技術に関する。
【背景技術】
【0002】
従来、車両に搭載されるナビゲーション装置が知られている。このナビゲーション装置では、地図情報処理装置は、予め記憶された地図情報に基づいて表示装置に地図を表示させる。運転者は、この表示装置に表示された地図を見ることにより自車両の位置を確認しながら運転を行うことができるので、道に迷うことなく、目的地に確実且つ短時間で到着できる。
【0003】
ところで、このようなナビゲーション装置としては、自己が保有している地図情報に存在しない道路を走行した際に、走行履歴から新規道路を検出し、保有している地図情報に追加するナビゲーション装置が知られている(例えば、特許文献1参照)。このナビゲーション装置は、車両の走行軌跡に基づいて、地図情報に含まれない新たな道路を検出したときに、この道路に対応する走行軌跡を含む更新情報を作成して既存道路情報に追加するとともに、検出された道路の始終点を既存の地図情報に接続する。
【0004】
【特許文献1】特開2002−243469号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところが、上述した特許文献1に記載された技術では、新しく検出された道路の始終点における既存の道路との接続は可能であるが、始終点以外の地点における他の道路との交差については対応がなされておらず、新しく検出された道路の始終点以外の地点における他道路との交差点の情報を含む地図情報に更新できない。したがって、実際の道路状況に即した経路探索や経路案内をできないという問題がある。
【0006】
この発明は、上述した問題を解消するためになされたものであり、実際の道路状況に即した経路探索や経路案内を可能にする地図情報処理装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
この発明に係る地図情報処理装置は、自己の位置を検出する位置検出手段と、道路情報を含む地図情報を記憶する地図情報記憶手段と、地図情報記憶手段から地図情報を取得する地図情報取得手段と、位置検出手段によって検出された自己の位置に対応する道路が地図情報取得手段で取得された地図情報に含まれる道路情報中に存在しない新規道路を検出する新規道路検出手段と、新規道路情報を記憶する新規道路情報記憶手段と、新規道路検出手段で検出された新規道路と地図情報取得手段で取得された地図情報に含まれている道路または新規道路検出手段によって過去に検出された道路とが該新規道路の始終点以外で交差する交差地点を判定する交差判定手段と、新規道路検出手段で検出された新規道路を表す新規道路情報を生成するとともに、前記新規道路情報記憶手段に記憶されている新規道路情報および地図情報記憶手段に記憶されている地図情報に含まれる道路情報を更新するための情報を含む道路更新情報を生成する道路更新情報生成手段と、道路更新情報生成手段で生成された道路更新情報に基づき、地図情報記憶手段に記憶されている地図情報に含まれる道路情報および新規道路情報記憶手段に記憶されている新規道路情報に含まれる道路情報を更新し、且つ新規道路情報記憶手段に新規道路情報を書き込む道路情報更新手段とを備えているものである。
【発明の効果】
【0008】
この発明によれば、新規に検出された道路の始終点以外の地点における交差点の情報を利用することができるので、実際の道路状況に即した経路探索や経路案内を可能にする地図情報処理装置を提供できる。
【発明を実施するための最良の形態】
【0009】
以下、この発明の実施の形態を、図面を参照しながら詳細に説明する。なお、以下の各実施の形態において、同一または相当する構成部分には同一の符号を付して説明する。
実施の形態1.
図1は、この発明の実施の形態1に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、カーナビゲーション装置と、これに接続された表示装置40、音声出力装置41、入力装置42、車速センサ43、角速度センサ44およびGPS(Global Positioning System)受信アンテナ45から構成されている。
【0010】
カーナビゲーション装置は、表示地図計算手段10、経路計算手段11、表示制御手段12、音声出力制御手段13、入力受信手段14、測位手段15、HDD(Hard Disk Drive)16、HDDアクセス手段17、一時記憶メモリ18、新規道路検出手段19、交差判定手段20、道路更新情報生成手段21、交差点問合せ手段22、交差点決定手段23、道路情報更新手段24および制御手段25から構成されている。
【0011】
表示地図計算手段10は、地図情報および新規道路情報から表示用の地図画像を計算する。経路計算手段11は、任意の2点間の推奨経路を計算する。表示制御手段12は、表示地図計算手段10によって計算された表示用の地図画像や経路計算手段11によって計算した推奨経路を表示装置40が表示可能な形式に変換し表示装置40に送る。音声出力制御手段13は、経路計算手段11によって計算された推奨経路に従って目的地までの案内を行う音声情報や、地図情報に含まれている情報を運転者に知らせるための音声情報を音声出力装置41が出力可能な形式に変換し音声出力装置41に送る。入力受信手段14は、外部の入力装置42からの入力信号を受信する。
【0012】
測位手段15は、この発明の位置検出手段に対応する。この測位手段15は、車速センサ43、角速度センサ44およびGPS受信アンテナ45からの信号に基づいて、自己(当該地図情報処理装置が搭載された車両をいう。以下においても同じ)の現在位置を決定するとともに、決定した現在位置とHDD16に記憶されている道路情報を照合し、自己の現在位置が道路情報で表されている何れの道路の何れの位置に該当するかを算出する。測位手段15は、表示地図計算手段10において自己の周囲の地図を表示するための計算が行われる際や、経路計算手段11において自己の現在位置から入力地点への推奨経路が計算される際には、測位結果を表示地図計算手段10や経路計算手段11に送る。
【0013】
HDD16は、この発明の地図情報記憶手段および新規道路情報記憶手段に対応する。このHDD16は、地図情報を記憶する地図情報記憶手段16aと新規道路情報を記憶する新規道路情報記憶手段16bとを備えている。地図情報記憶手段16aには、当該地図情報処理装置の出荷時に、道路情報を含む地図情報が記憶されている。地図情報は、緯度線および経度線に平行な線で網目状に分割された領域ごとに作成されている。この領域を「メッシュ」と呼ぶ。
【0014】
また、新規道路情報記憶手段16bは、出荷時に記憶された地図情報に存在しない道路を走行した際に、その道路を表す新規道路情報が追加される領域である。新規道路情報も、地図情報と同様に網目状に分割されており、メッシュ毎に新規道路情報が作成され、記憶される。HDDアクセス手段17は、HDD16にアクセスするための制御を行う。一時記憶メモリ18は、例えば揮発性メモリから構成されており、種々の情報を一時的に記憶するために使用される。
【0015】
新規道路検出手段19は、地図情報に存在しない新規道路を検出する。この新規道路検出手段19の詳細は後述する。交差判定手段20は、既存の道路と新規道路との交差の有無を判定する。この交差判定手段20の詳細は後述する。道路更新情報生成手段21は、地図情報を更新するための道路更新情報を生成する。この道路更新情報生成手段21の詳細は後述する。
【0016】
交差点問合せ手段22は、道路更新情報生成手段21によって仮交差点(詳細は後述する)として生成された地点が通常の平面交差点であるのか立体交差点であるのかをユーザに問い合わせる。この交差点問合せ手段22の詳細は後述する。交差点決定手段23は、経路計算手段11によって算出された推奨経路が仮交差点における右左折を含む場合に、問い合わせの画面を表示してユーザに提示し、仮交差点の状態をユーザに選択的に入力させる。この交差点決定手段23の詳細は後述する。
【0017】
道路情報更新手段24は、道路更新情報生成手段21によって生成された道路更新情報に基づき、HDD16の内部の地図情報および新規道路情報を更新する。この道路情報更新手段24の詳細は後述する。制御手段25は、予めプログラムされた手順に従い、表示地図計算手段10、経路計算手段11、表示制御手段12、音声出力制御手段13、入力受信手段14、測位手段15、HDDアクセス手段17を制御する。
【0018】
表示地図計算手段10、経路計算手段11、音声出力制御手段13および測位手段15は、HDD16に記憶されている地図情報や新規道路情報に含まれている道路(以下、「既存道路」という)の道路情報を使用してそれぞれの処理を実行する際には、その処理の過程において使用するメッシュに該当する地図領域の地図情報や新規道路情報をHDDアクセス手段17によってHDD16から読み出し、読み出した情報を一時記憶メモリ18に保存して使用する。
【0019】
カーナビゲーション装置に接続される表示装置40は、表示制御手段12から送られてくる表示用の地図画像や推奨経路の情報に基づき表示を行う。音声出力装置41は、推奨経路に従って目的地までの案内を行う音声や、地図情報に含まれている情報を音声で出力する。入力装置42は、表示装置40に表示したい地図領域や、推奨経路の計算を行いたい始点や終点を入力する。この入力装置42は、例えばカーナビゲーション装置の前面に配される本体パネルに設置された入力ボタン、入力ボタンと同等の入力信号を発信するリモートコントローラ(リモコン)、表示装置40の画面上に設定されたタッチパネル、音声操作を行うための音声入力用マイクロホン、または、これらの組合せによって構成できる。
【0020】
車速センサ43は、この発明の速度検出手段に対応し、自己が移動する速度を検出する。この車速センサ43で検出された速度は、測位手段15に送られる。角速度センサ44は、自己の方向変化を検出する。この角速度センサ44で検出された方向変化は、測位手段15に送られる。GPS受信アンテナ45は、GPS衛星から送られてくる電波を受信する。このGPS受信アンテナ45で電波を受信することにより得られたGPS信号は、測位手段15に送られる。
【0021】
次に、上記のように構成される、この発明の実施の形態1に係る地図情報処理装置の動作を説明する。
【0022】
以下では、新規道路検出手段19、交差判定手段20、道路更新情報生成手段21、道路情報更新手段24によってHDD16に地図情報としても新規道路情報としても未だ保存されていない道路情報を生成し、追加する動作を説明する。
【0023】
図2は、地図情報処理装置の測位に関するメイン処理を示すフローチャートである。このメイン処理では、まず、開始処理が実行される(ステップST10)。この開始処理では、前回終了時の状態に復元する初期化処理などが行われる。この開始処理が終了すると、次いで、測位手段15によって現在位置が検出される(ステップST11)。そして、このステップST11で検出された現在位置が、既存道路上に位置しているかどうかが調べられる(ステップST12)。ここで、現在位置が既存道路上に位置していないことが判断されると、新規道路検出処理が行われる(ステップST15)。この新規道路検出処理については後述する。その後、シーケンスはステップST16に進む。
【0024】
上記ステップST12で、現在位置が既存道路上に位置していることが判断されると、前回の測位結果が一時記憶メモリ18から削除される(ステップST13)。そして、最新の測位によって得られた現在位置が一時記憶メモリ18に記憶される(ステップST14)。次いで、メイン処理の終了指示がなされたかどうかが調べられる(ステップST16)。ここで、メイン処理の終了指示がなされていないことが判断されると、シーケンスはステップST11に戻り、上述した処理が繰り返される。一方、ステップST16において、終了指示がなされたことが判断されると、終了処理が実行される(ステップST17)。これにより、地図情報処理装置の測位に関するメイン処理は終了する。
【0025】
次に、図2のステップST15において、新規道路検出手段19によって行われる新規道路検出処理の詳細を、図3に示すフローチャートを参照しながら説明する。
【0026】
新規道路検出処理では、まず、逸脱情報が一時記憶メモリ18に一時記憶される(ステップST20)。逸脱情報は、既存道路から逸脱した時点における既存道路および位置を表す情報から構成されている(詳細は後述する)。次いで、測位手段15によって現在位置が検出される(ステップST21)。次いで、ステップST21で検出された現在位置が既存道路上に位置しているかどうかが調べられる(ステップST22)。
【0027】
このステップST22で、現在位置が既存道路上に位置していないことが判断されると、新規道路を走行中であることが認識され、次いで、走行履歴時系列データ判定条件を満たしているかどうかが調べられる(ステップST23)。ここで、走行履歴時系列データ判定条件とは、測位手段15から得られる現在位置のうち走行履歴として格納すべき現在位置を規定する条件である(詳細は後述する)。
【0028】
上記ステップST23で、走行履歴時系列データ判定条件を満たしていることが判断されると、現在位置が走行履歴として一時記憶メモリ18に一時記憶される(ステップST24)。その後、シーケンスはステップST21に戻る。一方、上記ステップST23で、走行履歴時系列データ判定条件を満たしていないことが判断されると、現在位置が走行履歴として一時記憶メモリ18に一時記憶されずに、シーケンスはステップST21に戻る。以下、ステップST22〜ST24の処理が繰り返し実行される。
【0029】
上記ステップST22〜ST24の処理の繰り返し実行の途中で、ステップST22において、現在位置が既存道路上に存在していることが判断されると、新規道路を走行中であった車両が既存道路に合流したことが認識され、合流情報が一時記憶メモリ18に一時記憶される(ステップST25)。ここで、合流情報は、新規道路から既存道路に合流した時点における既存道路および位置を表す情報から構成されている。以上の処理により、新規道路検出処理は終了する。
【0030】
上述した新規道路検出処理が終了すると、次いで、図4のフローチャートに示すように、交差判定処理(ステップST30)、道路更新情報生成処理(ステップST31)および道路情報更新処理(ステップST32)が順次実行される。以下、これらの各処理を詳細に説明する。
【0031】
まず、図4のステップST30において、交差判定手段20によって行われる交差判定処理を、図5に示すフローチャートを参照しながら説明する。
【0032】
交差判定処理が開始されると、まず、新規道路が複数の線分に分割される(ステップST40)。次いで、分割された全線分についての交差判定が完了したかどうかが調べられる(ステップST41)。ここで、交差判定が完了したことが判断されると、交差判定処理は終了する。上記ステップST41において、分割された全線分についての交差判定が完了していないことが判断されると、次いで、未判定線分の中から1つが選択される(ステップST42)。次いで、選択された線分の近傍の既存道路が、当該新規道路が含まれるメッシュに該当する地図情報および新規道路情報の中から抽出される(ステップST43)。次いで、抽出された線分の近傍の全道路について、当該線分との交差判定が完了したかどうかが調べられる(ステップST44)。ここで、交差判定が完了したことが判断されると、シーケンスはステップST41に戻り、再度、未判定線分の有無の確認が行われる。
【0033】
上記ステップST44において、交差判定が完了していないことが判断されると、次いで、未判定の近傍道路から1つの道路が選択される(ステップST45)。次いで、選択された線分と選択された近傍道路の位置関係が計算される(ステップST46)。次いで、ステップST46で得られた計算結果に基づいて、選択された線分と選択された近傍道路とが交差しているかどうかが調べられる(ステップST47)。ここで、交差していないことが判断されると、シーケンスはステップST44に戻り、再度、交差判定が完了していない近傍道路の有無の確認が行われる。
【0034】
上記ステップST47において、交差していることが判断されると、交差地点座標と近傍道路を特定する情報とが交差情報として一時記憶メモリ18に一時記憶される(ステップST48)。その後、シーケンスはステップST41に戻り、上述した処理が繰り返される。以上により、交差判定処理は終了する。
【0035】
次に、図4のステップST31において、道路更新情報生成手段21によって行われる道路更新情報生成処理を、図6に示すフローチャートを参照しながら説明する。
【0036】
道路更新情報生成処理では、まず、一時記憶メモリ18から逸脱情報が読み込まれる(ステップST50)。次いで、一時記憶メモリ18から合流情報が読み込まれる(ステップST51)。次いで、一時記憶メモリ18から走行履歴が読み込まれる(ステップST52)。次いで、一時記憶メモリ18に交差情報が記憶されているかどうかが調べられる(ステップST53)。ここで、交差情報が記憶されていることが判断されると、その交差情報が一時記憶メモリ18から読み出される(ステップST54)。一方、交差情報が記憶されていないことが判断されると、ステップST54の処理はスキップされる。
【0037】
次いで、ステップST50〜ST54の処理により読み出された逸脱情報、合流情報、走行履歴および交差情報に基づき新規道路情報が生成される(ステップST55)。次いで、地図情報を更新する必要があるどうかが調べられる(ステップST56)。ここで、必要があることが判断された場合は、地図情報を更新するための道路更新情報が交差情報に基づいて生成される(ステップST57)。ステップST56で、地図情報を更新する必要がないことが判断されると、ステップST57の処理はスキップされる。以上により、道路更新情報生成処理は終了する。
【0038】
次に、図4のステップST32において、道路情報更新手段24によって行われる道路情報更新処理を、図7に示すフローチャートを参照しながら説明する。
【0039】
道路情報更新処理では、まず、当該新規道路の位置するメッシュに該当する新規道路情報がHDD16に存在するかどうかが調べられる(ステップST60)。ここで、存在することが判断された場合は、新たに生成された新規道路情報が、HDD16に存在する当該メッシュの新規道路情報に追加される(ステップST61)。一方、HDD16に当該メッシュの新規道路情報が存在しない場合は、当該メッシュの新規道路情報としてHDDに保存する(ステップST62)。
【0040】
次に、HDD16に記憶されている当該メッシュに該当する地図情報を修正するための道路更新情報が生成されているかどうかが調べられる(ステップST63)。ここで、生成されていることが判断された場合は、当該道路更新情報に従って、地図情報が更新される(ステップST64)。一方、当該メッシュに該当する地図情報を更新するための道路更新情報が生成されていない場合は、ステップST64の処理はスキップされる。以上により、道路情報更新処理は終了する。
【0041】
次に、具体的な走行例を用いて、新規道路の検出、生成および追加の動作を説明する。図8は、あるメッシュに含まれる既存道路によって構成される道路情報の一部分を示しており、交差点を表すノード(丸印)と、交差点間の道路を表すリンク(丸印の間の線分)で道路が表現されている。これらノードとリンクとで道路のつながりを表現したものを道路ネットワークと呼ぶ。この道路ネットワークにおいて点線で示すように、リンクL1上を走行中、P1の地点においてL1から逸脱し、地点QにおいてリンクL2を横切り、地点P2においてリンクL3に合流し、リンクL3上を走行した場合を想定し、既存道路に含まれていない新規道路を追加する処理を説明する。
【0042】
リンクL1の走行中に、測位手段15は、車速センサ43、角速度センサ44およびGPS受信アンテナ45からの信号に基づいて、現在位置を計算し、また、HDD16に記憶されている地図情報に含まれる道路情報を参照し、リンクL1上を走行していることを認識している。そして、最新の測位結果を常に一時記憶メモリ18に記憶する。この時、前回の測位結果は削除される。この地図情報処理装置を搭載した車両がP1の地点においてリンクL1から逸脱したとき、測位手段15の測位結果に基づき、その旨が検出され、逸脱前の走行リンクと逸脱地点が逸脱情報として一時記憶メモリ18に記憶される。図8に示す例では、リンクL1と地点P2が一時記憶メモリ18に記憶される。
【0043】
次に、新規道路検出手段19における処理(図2における新規道路検出処理)について説明する。
【0044】
新規道路検出手段19は、逸脱が検出された後、再び既存道路上の走行に戻るまで、すなわち、既存道路への合流を検出するまでの走行軌跡を一時記憶メモリ18に記憶させる。図8に示す例では、地点P1から地点P2までの走行軌跡が一時記憶メモリ18に記憶される。走行軌跡は、例えば、測位手段15が測位した車両位置の時系列データである。時系列データを取得する最も簡単な方法としては、一定時間毎にデータを取得する方法が考えられる。通常、測位手段15は、定められた時間間隔で現在位置の測位を行う。したがって、一定時間毎に車両位置を取得する方法としては、n回(nは1以上の整数)に1回の割合で測位結果を一時記憶メモリ18に記憶する方法を採用できる。図9は、3回に1の割合で測位結果を記憶する例を示しており、この場合、9地点の測位結果が走行履歴として記憶される。
【0045】
しかし、上述した方法では、取得されるデータ数が増加し、一時記憶メモリ18を浪費するおそれがある。そこで、走行履歴時系列データ判定条件として、一定距離の走行毎の測位結果データを一時記憶メモリ18に記憶するという条件を追加し、取得されるデータ数を削減することが可能である。図10は、一定距離毎に測位結果を記憶する例を示しており、この場合、7地点の測位結果が走行履歴として記憶される。
【0046】
また、走行履歴時系列データ判定条件として、車両の進行方向が閾値を超えて変化したときに測位結果データを一時記憶メモリ18に記憶するという条件を使用することで、取得されるデータ数をより削減し、一時記憶メモリ18の浪費をさらに抑制することが可能になる。図11は、進行方向が変化する毎に測位結果を記憶する例を示しており、この場合、5地点の測位結果が走行履歴として記憶される。進行方向の変化は、角速度センサ44の検出結果を利用することで検出できる。また、前々回の測位結果と前回の測位結果とを結ぶ第1線分と、前回の測位結果と最新の測位結果を結ぶ第2線分とのなす角度を利用して検出することもできる。
【0047】
次に、新規道路検出手段19は、合流リンクと合流地点の情報を合流情報として一時記憶メモリ18に記憶させる。図8に示す例では、リンクL3と地点P2とが一時記憶メモリ18に記憶される。新規道路検出手段19によって以上の処理が完了すると、次に、交差判定手段20が、新規道路検出手段19によって検出された新規道路の逸脱および合流地点以外の地点におけると既存道路との交差の有無を判定する。交差の有無の判定は、新規道路の走行履歴として一時記憶メモリ18に記憶されている位置情報の時系列データを複数の線分に分割し、各線分と2次元的に交差する既存道路を検索することにより行われる。
【0048】
走行履歴を複数の線分に分割する方法としては、全ての時系列データを用いて分割する方法が最も簡単である。しかし、時系列データ点数が増加すると、それに比例して交差判定に要する計算時間も増加してしまう。そこで、時系列データを間引いて線分を分割することで、この問題を解決するように構成できる。また、交差判定において検索対象とする既存道路は、メッシュ内の既存道路とすることで交差判定を現実的な時間以内に完了することが可能になる。
【0049】
交差判定手段20は、新規道路検出手段19によって検出された新規道路と既存道路との交差地点を検出すると、当該地点が交差地点であることを一時記憶メモリ18に記憶する。図8に示す例では、地点P1から地点P2に至る新規道路上で、リンクL2と地点Qにおいて交差していることが一時記憶メモリ18に記憶される。
【0050】
次に、道路更新情報生成手段21は、一時記憶メモリ18に記憶されている新規道路の情報を、HDD16の内部に新規道路情報として保存する形式に変換する。
【0051】
また、図12は、図8に示した道路ネットワークに対して、地点P1から地点Qを通り地点P2に至る新規道路を追加した結果の道路ネットワークを示している。この図12からわかるように、新規道路を追加すると、図8に示す例では1本のリンクであったリンクL1、L2およびL3が、それぞれ地点P1、QおよびP2においてL1aとL1b、L2aとL2b、L3aとL3bという2本のリンクに分割されることになる。
【0052】
そこで、道路更新情報生成手段21は、既存道路のリンクにおいて、新規道路との交差点となりうる地点にノードを発生させ、リンクを分割するための情報も生成する。この道路更新情報生成手段21が生成する情報を「道路更新情報」と呼ぶ。
【0053】
この時、道路更新情報生成手段21は、新規道路の始終点以外であって既存道路と交差している地点に該当するノードを仮交差点であるとして道路更新情報を生成する。HDD16の地図情報記憶手段16aに記憶されている地図情報に含まれる道路情報や、新規道路情報記憶手段16bに記憶されている新規道路情報においては、ノードを表現するフィールド中に、仮交差点フラグとして1ビットを割当て、これを利用して当該ノードが仮交差点であるか否かを表現する。
【0054】
図8および図12に示す例では、道路更新情報生成手段21は、生成する新規道路情報の中の地点Qに該当するノードの仮交差点フラグをONにするとともに、既存道路のリンクL2を分割したL2a、L2bにおける地点Qに該当するノードの仮交差点フラグをONにした道路更新情報を生成する。
【0055】
また、道路更新情報生成手段21は、仮交差点における通行規制を、全ての方向に通行可として生成する。通行規制について、以下に説明する。カーナビゲーション装置が利用する道路情報には、通常、ノードにおける通行規制が記述されている。今、例えば図13(a)に示すように、ノード0にリンク1からリンク4までの4本のリンクが接続されており、リンク1はノード0に向かう方向の一方通行、リンク3からノード0に向かう場合はリンク4へ向かう左折のみ可能、という場合を想定する。このとき、ノード0における進入リンクと脱出リンクの組合せによって、その通行可否は、図13(b)に示すように表現できる。この通行可否を表す情報がノードに関連付けられた情報として、道路情報に記述される。これを通行規制と呼ぶ。
【0056】
次に、道路情報更新手段24は、道路更新情報生成手段21で生成された道路更新情報に含まれる新規道路情報を、HDDアクセス手段17を介してHDD16の内部の新規道路情報記憶手段16bに保存する。このとき、保存しようとするメッシュに対応する新規道路情報が既に存在している場合は、その新規道路情報に追加し、そのメッシュに対応する新規道路情報が存在しない場合には、そのメッシュに対応する新規道路情報として新たに保存する。また、道路情報更新手段24は、既存の道路ネットワークを更新するための情報が道路更新情報に含まれている場合は、その情報に従って既存の道路ネットワークを更新する。
【0057】
次に、道路更新情報生成手段21によって仮交差点として生成された地点が通常の平面交差点であるのか立体交差であるのかを、交差点問合せ手段22および交差点決定手段23で特定する動作について説明する。
【0058】
図14は、経路計算手段11によって算出された推奨経路に、仮交差点として登録されているノード(図14中に、新規交差点として二重丸によって表現されている)における右左折が含まれている場合の表示装置40への表示例である。この表示は交差点問合せ手段22によって実施される。この表示例では、画面は、推奨経路を提示する地図、推奨経路に仮交差点で右左折する地点が存在することを示すメッセージ、仮交差点の状態の入力をユーザに促す選択メニューおよび案内開始ボタンから構成されている。なお、画面の中に描かれている第2経路は、仮交差点(図14中の新規交差点)が立体交差等から構成されており、右左折することができないと仮定した場合の推奨経路を示すものである。
【0059】
なお、図14に示す表示画面の表示とともに、音声出力装置41から、仮交差点として登録されているノードにおける右左折が含まれる推奨経路が算出されたことを音声によってユーザに案内するように構成できる。この時、右左折する仮交差点がどのような位置にあり(住所や周辺の施設など)、どのような道路同士の交差であるか(道路番号、道路名称など)を伝えるように構成すれば、案内対象の仮交差点が、現実のどの交差地点を指し示しているかをユーザは、より正確に把握することができる。
【0060】
図14に示される表示や、上述した音声案内によって、仮交差点で右左折する経路を提示されたユーザは、案内対象の仮交差点の状態を選択する。図14に示す例では、ユーザは選択メニューに示されている「通常交差点」、「立体交差」、「不明」および「案内開始」のいずれかを選択する。この選択は、本体パネルに設置されたボタンを操作することにより選択メニューの所望の項目にフォーカスをあて、実行ボタンを押下することで実現できる。また、リモコンに設置されたボタンを操作することによっても実現できる。また、表示装置40にタッチパネル入力装置を備えれば、タッチパネル操作によっても実現できる。さらには、音声認識手段を備えれば、音声入力による操作によっても実現できる。
【0061】
図15は、経路計算手段11によって算出された推奨経路に、仮交差点として登録されているノードにおける右左折が含まれない場合の表示装置40への表示例である。この場合、通常の推奨経路の算出結果が表示される。図15に例示した推奨経路の算出結果の表示画面は、推奨経路を提示する地図と、推奨経路が求まったことを示すメッセージおよび案内開始ボタンから構成されている。
【0062】
本体パネルに備え付けられた操作ボタン、リモコン、タッチパネル、または、音声入力などによって案内開始ボタンを押下することにより、図15に示す表示画面から通常の地図表示画面に遷移し、目的地までの案内がユーザに提供される。
【0063】
図16は、図14に示した仮交差点の状態を選択する画面の提示後、交差点決定手段23によって仮交差点の状態が設定されるまでの交差点決定処理を示すフローチャートである。
【0064】
この交差点決定処理では、交差点問合せ手段22によって図14に示す画面が表示された後、ユーザによる選択待ちに入る(ステップST70)。次いで、選択メニューの何れかの項目が選択されたかどうかが調べられる(ステップST71)。ここで、何れも選択されていないことが判断されると、シーケンスはステップST70に戻り、再び、ユーザによる選択待ちに入る。
【0065】
ステップST71で、選択メニューの何れかの項目が選択されたことが判断されると、次いで、「案内開始」が選択されたかどうかが調べられる(ステップST72)。ここで、案内開始が選択されたことが判断されると、交差点決定処理は終了する。一方、案内開始が選択されていないことが判断されると、次いで、「立体交差」が選択されたかどうかが調べられる(ステップST73)。ここで、立体交差が選択されたことが判断されると、HDD16に記憶されている当該仮交差点における通行規制が、右左折の全組合せ(直進を除く)についてOKからNGに変更される(ステップST74)。次いで、HDD16に記憶されている当該仮交差点における仮交差点フラグがOFFに変更される(ステップST75)。
【0066】
上記ステップST73で、立体交差が選択されていないことが判断されると、次いで、「通常交差点」が選択されたかどうかが調べられる(ステップST76)。ここで、通常交差点が選択されたことが判断されると、シーケンスはステップST75に移り、上述した処理が実行される。一方、通常交差点が選択されていない、つまり「不明」が選択されたことが判断されると、シーケンスはステップST77に移る。この場合、仮交差点は、そのまま残される。
【0067】
ステップST77では、経路計算手段11によって算出された推奨経路上で、右左折する仮交差点についてユーザによる選択が完了したかどうかが調べられる。ここで、ユーザによる選択が完了していない、つまり推奨経路上で右左折する仮交差点が未だ存在することが判断されると、次の右左折する仮交差点における選択メニューが表示される(ステップST78)。その後、シーケンスはステップST70に戻り、再び、ユーザによる選択待ち状態に入る。
【0068】
ステップST77において、ユーザによる選択が完了した、つまり推奨経路上で右左折する仮交差点が存在しないことが判断されると、選択メニューの「案内開始」以外の項目が選択不可にされる(ステップST79)。その後、シーケンスはステップST70に戻り、再び、ユーザによる選択待ち状態に入る。
【0069】
以上説明したように、この発明の実施の形態1に係る地図情報処理装置によれば、HDD16に記憶されていない道路を走行した場合に、その道路をHDD16に追加記憶し、さらには既存道路との交差点を正確に反映したナビゲーションを実現できる。
【0070】
より詳しくは、この地図情報処理装置によれば、新規に検出された新規道路の始終点以外の地点における交差点の情報を利用することができる。また、仮交差点を通常の平面交差点と区別することで、立体交差のところを誤って通常の平面交差点と同様に処理することを防ぐことができる。また、平面交差点と決定された交差地点においては、その後の処理において既存道路における交差点と同様の扱いをすることが可能になる。また、平面交差点か立体交差かをユーザに問い合わせることで、機械的に平面交差点/立体交差を判断する場合と比較し、誤判断の発生を削減することができる。さらに、ユーザに問い合わせるタイミングを経路計算において仮交差点が平面交差点であるのか立体交差であるのかの判断が必要となる時点とすることで、問い合わせが頻発することを防ぐことができる。
【0071】
なお、この実施の形態1に係る地図情報処理装置では、新規道路情報と地図情報は別々のものとして存在するように構成したが、新規道路情報を地図情報の中に含める形で保存するように構成できる。この場合、道路更新情報生成手段21は、生成した新規道路情報を地図情報の中のどの位置に追加するか、また、新規道路情報を地図情報の中に追加することで、既存の地図情報の修正が必要になる場合は、どの情報をどのように修正する必要があるかを表現した道路更新情報の生成も行う。
【0072】
実施の形態2.
上述した実施の形態1に係る地図情報処理装置では、交差点決定手段23は、経路計算手段11によって算出された推奨経路が仮交差点における右左折を含む場合に、図14に示した画面を表示してユーザに提示し、仮交差点の状態をユーザが選択的に入力するように構成したが、この実施の形態2に係る地図情報処理装置では、仮交差点の状態の入力を、地図情報処理装置の電源OFF信号が発生された時に行うようにしたものである。
【0073】
図17は、地図情報処理装置の電源OFF信号が発生された時に、ユーザが仮交差点の状態を選択的に入力するための画面の例を示す。この例では、表示画面は、仮交差点(図17中の新規交差点)を含む地図、仮交差点の状態を入力する画面であることを示すメッセージ、仮交差点の状態の入力をユーザに促す選択メニュー、設定終了ボタンから構成されている。図17に示す表示は、交差点問合せ手段22によって実施される。
【0074】
図18は、図17に示した仮交差点の状態を選択する画面の提示後、交差点決定手段23によって仮交差点の状態が設定されるまでの交差点決定処理を示すフローチャートである。
【0075】
この交差点決定処理では、交差点問合せ手段22によって図17に示す画面が表示された後、ユーザによる選択待ちに入る(ステップST80)。次いで、選択メニューの何れかの項目が選択されたかどうかが調べられる(ステップST81)。ここで、何れも選択されていないことが判断されると、シーケンスはステップST80に戻り、再び、ユーザによる選択待ちに入る。
【0076】
ステップST81で、選択メニューの何れかの項目が選択されたことが判断されると、次いで、「設定終了」が選択されたかどうかが調べられる(ステップST82)。ここで、設定終了が選択されたことが判断されると、交差点決定処理は終了する。一方、案内開始が選択されていないことが判断されると、次いで、「立体交差」が選択されたかどうかが調べられる(ステップST83)。ここで、立体交差が選択されたことが判断されると、HDD16に記憶されている当該仮交差点における通行規制が、右左折の全組合せ(直進を除く)についてOKからNGに変更される(ステップST84)。次いで、HDD16に記憶されている当該仮交差点における仮交差点フラグがOFFに変更される(ステップST85)。
【0077】
上記ステップST83で、立体交差が選択されていないことが判断されると、次いで、「通常交差点」が選択されたかどうかが調べられる(ステップST86)。ここで、通常交差点が選択されたことが判断されると、シーケンスはステップST85に移り、上述した処理が実行される。一方、通常交差点が選択されていない、つまり「不明」が選択されたことが判断されると、シーケンスはステップST87に移る。この場合、仮交差点は、そのまま残される。
【0078】
ステップST87では、全ての仮交差点についてユーザによる選択が完了したかどうかが調べられる。ここで、ユーザによる選択が完了していない、つまり仮交差点が未だ残っていることが判断されると、次の仮交差点における選択メニューが表示される(ステップST88)。次の仮交差点の選択は、仮交差点は測位手段15によって測位される自己の現在位置からの距離が近い順に行われる。その後、シーケンスはステップST80に戻り、再び、ユーザによる選択待ち状態に入る。
【0079】
ステップST87において、ユーザによる選択が完了した、つまり仮交差点が残っていないことが判断されると、選択メニューの「設定終了」以外の項目が選択不可にされる(ステップST89)。その後、シーケンスはステップST80に戻り、再び、ユーザによる選択待ち状態に入る。
【0080】
以上説明したように、この発明の実施の形態2に係る地図情報処理装置によれば、地図情報処理装置の電源OFF信号が発生した時点、すなわち、地図情報処理装置の動作が終了する時点において、仮交差点の状態をユーザが設定可能になる。したがって、走行中に問い合わせが発生することを防ぐことができる。また、走行中に発生した仮交差点を、地図情報処理装置の動作の終了時に確認して、正式の交差点として地図情報および新規道路情報に組み込むことができる。
【0081】
また、この実施の形態2に係る地図情報処理装置では、地図情報処理装置の電源OFF信号が発生した時点で、ユーザが仮交差点の状態を選択的に入力するように構成したが、地図情報処理装置の電源ON信号が発生して地図情報処理装置が起動された時に、仮交差点の状態を選択的に入力するように構成することもできる。
【0082】
この構成によれば、起動時に仮交差点の状態を選択的に入力することにより、走行中に問い合わせが発生することを防ぐことができると同時に、ユーザが持っている最新の知識を地図情報に反映した交差点情報によって地図情報処理装置の動作を開始することができる。また、降車時に地図情報処理装置を操作する必要がないので、ユーザは、余裕をもって仮交差点の設定を行うことができる。
【0083】
また、この実施の形態2に係る地図情報処理装置では、図17に示す画面が表示されたときに、ユーザが設定すべき仮交差点の範囲は特に限定されていないが、設定すべき仮交差点の範囲を限定するように構成することもできる。この場合、ユーザは不要な設定操作から解放されることができる。ユーザが設定すべき仮交差点の範囲は、測位手段15によって測位される自己の現在位置からの距離によって決定するように構成できる。なお、目的地が設定されている場合には、現在位置と目的地とによって算出される適切な範囲によって、ユーザが設定すべき仮交差点の範囲を決定するように構成できる。また、ユーザが予め設定した範囲によって、ユーザが設定すべき仮交差点の範囲を決定するように構成することもできる。
【0084】
実施の形態3.
この発明の実施の形態3に係る地図情報処理装置は、実際の走行時に右左折したという情報に基づいて仮交差点の状態を設定するようにしたものである。
【0085】
図19は、この発明の実施の形態3に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置に方向指示器46が追加されるとともに、カーナビゲーション装置から交差点問合せ手段22が除去され、右左折検出手段26が追加されて構成されている。また、交差点決定手段23の動作が実施の形態1に係る地図情報処理装置のそれと異なる。
【0086】
方向指示器46は、地図情報処理装置が設置されている車両が右左折するときに、第三者にその右左折を伝達するために使用される。この方向指示器46によって示される右左折の方向を表す信号は、右左折検出手段26に送られる。
【0087】
右左折検出手段26は、角速度センサ44から送られてくる自己の方向変化を表す信号または方向指示器46からの信号に基づいて、自己の方向変化を検出する。この右左折検出手段26における検出結果は、制御手段25を介して交差点決定手段23に送られ、仮交差点の状態を設定するために使用される。
【0088】
次に、この発明の実施の形態3に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図20に示すフローチャートを参照しながら説明する。
【0089】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST90)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、その仮交差点で右左折がなされたことが右左折検出手段26によって検知されたかどうかが調べられる(ステップST91)。ここで、右左折が検知されたことが判断されると、その仮交差点における仮交差点フラグがOFFに変更され(ステップST92)、その後、処理は終了する。上記ステップST91において右左折が検知されなかったことが判断された場合も、処理は終了する。
【0090】
以上説明したように、この発明の実施の形態3に係る地図情報処理装置によれば、交差点で右左折することによって自動的に仮交差点が通常の平面交差点であることを認識し、その後は平面交差点として扱うことができる。また、方向指示器46の右左折情報で仮交差点が通常の平面交差点であることを認識できる。
【0091】
実施の形態4.
この発明の実施の形態4に係る地図情報処理装置は、高度情報に基づいて仮交差点の状態を設定するようにしたものである。
【0092】
この実施の形態4に係る地図情報処理装置の構成は、以下の点を除き、図1に示した実施の形態1に係る地図情報処理装置のそれと同じである。即ち、地図情報記憶手段16aに記憶される地図情報に含まれる道路情報は、ノードに関連付けられた情報として、そのノードの高度情報を予め含んでいる。また、新規道路情報記憶手段16bに記憶される新規道路情報には、ノードに関連付けられた情報として、そのノードの高度情報が含まれる。この高度情報は、測位手段15がGPS受信アンテナ45から得られるGPS信号に基づいて生成される。さらに、交差点決定手段23は、高度情報に基づいて仮交差点の状態を設定する。なお、実施の形態4に係る地図情報処理装置では、実施の形態1に係る地図情報処理装置における交差点問合せ手段22は不要である。
【0093】
次に、この発明の実施の形態4に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図21に示すフローチャートを参照しながら説明する。
【0094】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST100)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、HDDアクセス手段17を介して、HDD16の新規道路情報記憶手段16bに記憶されている新規道路情報から、その仮交差点に対応するノード情報を検索し、検索されたノード情報から高度情報が取得される(ステップST101)。
【0095】
次に、交差している相手の道路が地図情報の中に存在するか否かが調べられる(ステップST102)。この処理は、新規道路情報に含まれている交差情報を参照し、交差情報に記述されている交差相手の道路が地図情報の中に存在するか否かを調べることによって行われる。このステップST102で、交差している相手の道路が地図情報の中に存在することが判断されると、次いで、HDDアクセス手段17を介して、HDD16の地図情報記憶手段16aに記憶されている地図情報から該当する仮交差点のノード情報が検索され、そのノードの高度情報が取得される(ステップST103)。その後、シーケンスはステップST105に進む。
【0096】
上記ステップST102で、交差している相手の道路が地図情報の中に存在しないことが判断されると、次いで、HDDアクセス手段17を介して、HDD16の新規道路情報記憶手段16bに記憶されている新規道路情報から該当する仮交差点のノード情報が検索され、そのノードの高度情報が取得される(ステップST104)。その後、シーケンスはステップST105に進む。
【0097】
ステップST104では、ステップST101で取得された高度情報と、ステップST103またはステップST104で取得された高度情報とから高度差が算出される(ステップST105)。次いで、ステップST105で算出された高度差が予め定められた一定値以上であるかどうかが調べられる(ステップST106)。このステップST106で、一定値以上であることが判断されると、2つの道路は立体交差であることが認識され、その仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST107)。次いで、その仮交差点における仮交差点フラグがOFFに変更され(ステップST108)、処理は終了する。上記ステップST106において、ステップST105で算出された高度差が一定値未満であることが判断されると、2つの道路は平面交差であることが認識され、シーケンスはステップST108に進む。
【0098】
以上説明したように、この発明の実施の形態4に係る地図情報処理装置によれば、新規道路と既存の道路の交差地点における高さを比較することで自動的に仮交差点が通常の平面交差点か立体交差かを判断することができる。また、新規道路同士の交差地点においても、高さを比較することで自動的に仮交差点が平面交差しているか立体交差しているかを判断することができる。
【0099】
実施の形態5.
この発明の実施の形態5に係る地図情報処理装置は、実際の走行時に停止したという情報に基づいて仮交差点の状態を設定するようにしたものである。
【0100】
図22は、この発明の実施の形態5に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置のカーナビゲーション装置から交差点問合せ手段22が除去されて構成されている。また、HDD16の内部に走行履歴情報記憶手段16cが追加されている。
【0101】
また、地図情報処理装置の構成要素のうち、以下の点が実施の形態1に係る地図情報処理装置のそれと異なる。即ち、測位手段15は、車速センサ43からの信号に基づいて速度を検出する。また、測位手段15によって測位された位置とその位置を走行時の速度が走行履歴情報としてHDD16の走行履歴情報記憶手段16cに記憶される。さらに、交差点決定手段23は、走行履歴情報を参照し、仮交差点の状態を設定する。
【0102】
次に、この発明の実施の形態5に係る地図情報処理装置の交差点決定手段23において行われる、走行履歴情報を参照して仮交差点の状態を設定する処理を、図23に示すフローチャートを参照しながら説明する。
【0103】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST110)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、HDD16の走行履歴情報記憶手段16cに記憶されている走行履歴情報から当該仮交差点直前の速度推移が取得される(ステップST111)。
【0104】
次いで、ステップST111で取得された速度推移に基づいて、仮交差点直前で一時停車したかどうかが調べられる(ステップST112)。ここで、一時停車したことが判断されると、その仮交差点は通常の交差点であることが認識され、その仮交差点における仮交差点フラグがOFFに変更され(ステップST113)、その後、処理は終了する。上記ステップST112において一時停車しなかったことが判断された場合も、処理は終了する。
【0105】
以上説明したように、この発明の実施の形態5に係る地図情報処理装置によれば、新規道路と既存の道路の交差地点に進入する直前に赤信号によって停車した場合に自動的に仮交差点が通常の平面交差点であると判断することができる。
【0106】
実施の形態6.
この発明の実施の形態6に係る地図情報処理装置は、実際の走行時に新規道路から既存の道路に移動したという情報に基づいて仮交差点の状態を設定するようにしたものである。
【0107】
この実施の形態6に係る地図情報処理装置の構成は、交差点問合せ手段22が不要である点を除き、図1に示した実施の形態1に係る地図情報処理装置のそれと同じである。
【0108】
次に、この発明の実施の形態6に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図24に示すフローチャートを参照しながら説明する。
【0109】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST120)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、一時記憶メモリ18に記憶されている直前の測位結果から、仮交差点に進入した道路が取得される(ステップST121)。
【0110】
次いで、地図情報処理装置が仮交差点から脱出したかどうかが調べられる(ステップST122)。ここで、仮交差点から脱出していないことが判断されると、測位手段15によって得られる次回の測位結果から現在位置が検出される(ステップST123)。次いで、検出された現在位置が既存道路上に位置するかどうかが調べられる(ステップST124)。ここで、既存道路上に位置していないことが判断されると、新たな新規道路の検出処理に移行するために、交差点決定の処理を終了する。
【0111】
一方、ステップST124において、既存道路上に位置していることが判断されると、前回の測位結果が一時記憶メモリ18から削除される(ステップST125)。次いで、ステップST123で検出された最新の測位結果が一時記憶メモリ18に記憶される(ステップST126)。その後、シーケンスはステップST122に戻る。
【0112】
上記ステップST122において仮交差点から脱出したことが判断されると、ステップST121で取得された、仮交差点に進入してきた道路が、HDD16の地図情報記憶手段16aに記憶されている地図情報に含まれる道路か、または、HDD16の新規道路情報記憶手段16bに記憶されている新規道路情報に含まれる道路かが調べられる(ステップST127)。
【0113】
このステップST127において、地図情報に含まれる道路であることが判断されると、一時記憶メモリ18に記憶されている最新の測位結果を参照し、仮交差点から脱出して現時点で位置している道路(脱出道路)が取得される(ステップST128)。そして、ステップST128で取得した脱出道路が新規道路情報に含まれる道路かどうかが調べられる(ステップST129)。
【0114】
このステップST129において、脱出道路が新規道路情報に含まれない道路であることが判断されると、進入道路と脱出道路がともに地図情報に含まれる道路であるため、仮交差点の状態の設定は行われずに、処理は終了する。一方、ステップST129において、脱出道路が新規道路情報に含まれる道路であることが判断された場合は、仮交差点において地図情報に含まれる道路から進入し、新規道路情報に含まれる道路へ脱出したことになるため、この仮交差点は通常の交差点であると認識され、その仮交差点の仮交差点フラグがOFFに変更される(ステップST130)。その後、処理は終了する。
【0115】
上記ステップST127において、地図情報に含まれる道路でないことが判断されると(この場合は、仮交差点に進入した道路が新規道路情報に含まれる道路)、一時記憶メモリ18に記憶されている最新の測位結果を参照し、仮交差点から脱出して現時点で位置している道路が取得される(ステップST131)。そして、その道路が地図情報に含まれる道路であるかどうかが調べられる(ステップST132)。
【0116】
このステップST132において、地図情報に含まれる道路であると判断されると、仮交差点において新規道路情報に含まれる道路から進入し、地図情報に含まれる道路へ脱出したことになるため、この仮交差点は通常の交差点であると認識され、シーケンスはステップST130へ進む。
【0117】
一方、ステップST132において、地図情報に含まれない道路であると判断された場合は、脱出道路も新規道路情報に含まれる道路になり、進入道路と脱出道路がともに新規道路情報に含まれる道路ということになる。そこで、脱出道路である新規道路情報に含まれる道路が、進入道路である新規道路情報に含まれる道路と異なるか否かが調べられる(ステップST133)。ここで、異なることが判断された場合は、この仮交差点は通常の交差点であると認識され、シーケンスはステップST130に移る。一方、一致することが判断された場合は、この仮交差点は通常の交差点であるかどうかを判断できないため、処理は終了する。
【0118】
以上説明したように、この発明の実施の形態6に係る地図情報処理装置によれば、仮交差点において新規道路から入り、既存の道路へ出た場合に自動的に仮交差点が通常の平面交差点であると判断することができる。また、仮交差点において既存道路から入り、新規道路へ出た場合に自動的に仮交差点が通常の平面交差点であると判断することができる。さらに、仮交差点において新規道路から入り、別の新規道路へ出た場合に自動的に仮交差点が通常の平面交差点であると判断することができる。
【0119】
実施の形態7.
この発明の実施の形態7に係る地図情報処理装置は、撮影装置で撮影することにより得られた画像情報に基づいて仮交差点の状態を設定するようにしたものである。
【0120】
図25は、この発明の実施の形態7に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置に、例えばカメラから成る撮影装置47が追加されるとともに、カーナビゲーション装置から交差点問合せ手段22が除去され、映像信号処理手段27が追加されて構成されている。また、交差点決定手段23の動作が実施の形態1に係る地図情報処理装置のそれと異なる。
【0121】
撮影装置47は、地図情報処理装置が搭載された車両の周囲を撮影する。この撮影装置47で撮影することにより得られた映像信号は、映像信号処理手段27に送られる。映像信号処理手段27は、撮影装置47から送られてくる映像信号を処理し、道路の状況を表す映像情報として出力する。
【0122】
次に、この発明の実施の形態7に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図26に示すフローチャートを参照しながら説明する。
【0123】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST140)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、映像情報を解析し、立体交差かどうかの判定が行われる(ステップST141)。次いで、ステップST141における判定結果が立体交差であるかどうかが調べられる(ステップST142)。
【0124】
このステップST142において、立体交差であると判断されると、その仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST143)。次いで、その仮交差点における仮交差点フラグがOFFに変更される(ステップST144)。その後、処理は終了する。ステップST142において、立体交差でないと判断されると、次いで、ステップST141における判定結果が平面交差点であるかどうかが調べられる(ステップST145)。ここで、平面交差点であると判断されると、シーケンスはステップST144に移る。一方、平面交差点でないと判断されると、その仮交差点の状態は不明であると判断され、処理を行わずに終了する。
【0125】
以上説明したように、この発明の実施の形態7に係る地図情報処理装置によれば、撮影装置47の撮影画像から仮交差点が平面交差点か立体交差かを自動的に判断できる。
【0126】
実施の形態8.
この発明の実施の形態8に係る地図情報処理装置は、有料道路を走行したという情報に基づいて仮交差点の状態を設定するようにしたものである。
【0127】
図27は、この発明の図1に示した実施の形態1に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図25に示した実施の形態7に係る地図情報処理装置に、ETC(Electronic Toll Collection System:自動料金収受システム)装置48、ETCアンテナ49および運転席側窓センサ50が追加されるとともに、カーナビゲーション装置に有料道路走行判定手段28、不揮発性のバックアップRAM29および仮交差点道路種別判定手段30が追加されて構成されている。また、交差点決定手段23の動作が実施の形態7に係る地図情報処理装置のそれと異なる。
【0128】
有料道路走行判定手段28は、有料道路を走行中であるか否かを判断し、有料道路走行中には一時記憶メモリ18に有料道路走行中情報を記憶させる。有料道路を走行中であるか否かは以下の方法で判断される。即ち、有料道路入口通過検知から有料道路出口通過検知までの間が有料道路を走行中であると判断され、有料道路入口通過検知後、有料道路走行中情報が一時記憶メモリ18に記憶される。また、有料道路出口通過検知後、一時記憶メモリ18から有料道路走行中情報が削除される。
【0129】
有料道路走行判定手段28は、次のいずれかの方法により有料道路入口通過検知を行う。第1の入口通過検知方法は、次の通りである。即ち、ETCアンテナ49およびETC装置48を装備した移動体(車両)が有料道路に進入する際、ETC装置48はETCアンテナ49を介して有料道路に進入するという交信情報をETC地上装置(図示せず)との間で送受する。有料道路走行判定手段28は、この交信情報を取得することで、有料道路入口通過を検知する。
【0130】
第2の入口通過検知方法は、次の通りである。即ち、測位手段15によって測位された結果から、自己が位置する道路が取得される。有料道路走行判定手段28は、この取得された道路の道路種別が非有料道路(一般国道、都道府県道、主要地方道など)から有料道路に変化したときに、有料道路入口通過を検知する。
【0131】
また、有料道路走行判定手段28は、次のいずれかの方法により有料道路出口通過検知を行う。第1の出口通過検知方法は、次の通りである。即ち、有料道路走行中情報が一時記憶メモリ18に記憶されているときに、ETC装置48がETCアンテナ49を介してETC地上装置と有料道路出口で交信し料金支払いを行う。有料道路走行判定手段28は、その料金支払いの情報をETC装置48から取得し、有料道路出口通過を検出する。
【0132】
第2の出口通過検知方法は、次の通りである。即ち、有料道路走行中情報が一時記憶メモリ18に記憶されているときに、ETC装置48に挿入されていたETCカードが抜かれ、車速センサ43によって自己の移動速度がゼロまたは限りなくゼロに近い状態が一定時間継続しており、運転席側窓センサ50によって窓が開いた状態にあることが検出されたとき、有料道路走行判定手段28は、有料道路出口通過を検出する。
【0133】
第3の出口通過検知方法は、次の通りである。即ち、測位手段15によって測位された結果から、自己の位置する道路が取得される。有料道路走行判定手段28は、この取得された道路の道路種別が有料道路から非有料道路に変化したときに、有料道路出口通過を検出する。
【0134】
次に、有料道路走行中情報が一時記憶メモリ18に記憶されている状態で、サービスエリアなどで地図情報処理装置を搭載した車両がエンジンを停止し、地図情報処理装置の動作が終了する場合の動作を説明する。
【0135】
図28は、地図情報処理装置の電源OFF時の終了処理を示すフローチャートである。この終了処理が開始されると、まず、一時記憶メモリ18に有料道路走行中情報があるかどうかが調べられる(ステップST150)。ここで、有料道路走行中情報がないことが判断されると、終了処理は終了する。
【0136】
一方、ステップST150において、有料道路走行中情報があることが判断されると、一時記憶メモリ18に記憶されている有料道路走行中情報が読み出される(ステップST151)。次いで、その読み出された有料道路走行中情報がバックアップRAM29に記憶される(ステップST152)。以上により、終了処理は終了する。
【0137】
図29は、地図情報処理装置の電源ON時の起動処理を示すフローチャートである。この起動処理が開始されると、まず、バックアップRAM29に有料道路走行中情報が記憶されているかどうかが調べられる(ステップST160)。ここで、有料道路走行中情報が記憶されていないことが判断されると、起動処理は終了する。
【0138】
一方、ステップST160において、有料道路走行中情報が記憶されていることが判断されると、バックアップRAM29から有料道路走行中情報が読み出される(ステップST161)。次いで、その読み出された有料道路走行中情報が一時記憶メモリ18に記憶される(ステップST162)。以上により、起動処理は終了する。
【0139】
これら終了処理および起動処理により、有料道路走行中情報が一時記憶メモリ18に記憶されている状態で、サービスエリアなどで地図情報処理装置を搭載した車両がエンジンを停止し、地図情報処理装置の動作が終了する場合にも対応できる。
【0140】
次に、この発明の実施の形態8に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図30および図31に示すフローチャートを参照しながら説明する。
【0141】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST170)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、一時記憶メモリ18から有料道路走行中情報が取得される(ステップST171)。
【0142】
次いで、有料道路走行中情報を取得できたかどうかが調べられる(ステップST172)。ここで、有料道路走行中情報を取得できたことが判断されると、現在有料道路走行中であるので、その仮交差点は立体交差であると認識され、仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST173)。次いで、その仮交差点における仮交差点フラグがOFFに変更される(ステップST174)、その後、処理は終了する。
【0143】
上記ステップST172で、有料道路走行中情報を取得できなかったことが判断されると、交差道路種別判定処理が実行される(ステップST175)。この交差道路種別判定処理は、仮交差点道路種別判定手段30により実行されるものであり、仮交差点において交差している道路の道路種別が算出される。この交差道路種別判定処理の詳細は後述する。
【0144】
次いで、ステップST175において算出された交差道路のうち、少なくとも1つの道路種別が有料道路であるかどうかが調べられる(ステップST176)。ここで、少なくとも1つの道路種別が有料道路であることが判断されると、当該仮交差点は立体交差であると認識され、シーケンスはステップST173に移る。一方、少なくとも1つの道路種別が有料道路でない、つまり交差道路に道路種別が有料道路である道路が存在しないことが判断されると、処理は終了する。
【0145】
図31は、図30のステップST175で実行される交差道路種別判定処理の詳細を示すフローチャートである。この交差道路種別判定処理は、仮交差点道路種別判定手段30により実行される。
【0146】
交差道路種別判定処理では、まず、仮交差点において交差する全ての道路について道路種別の判定が終了したかどうかが調べられる(ステップST180)。ここで、全ての道路について道路種別の判定が終了したことが判断されると、交差道路種別判定処理は終了する。一方、ステップST180で、全ての道路について道路種別の判定が終了していない、つまり未判定の道路が残っていることが判断されると、その未判定の道路の中から1つが選択される(ステップST181)。そして、選択された道路が地図情報に含まれる道路情報であるかどうかが調べられる(ステップST182)。
【0147】
このステップST182で、選択された道路が地図情報に含まれる道路情報であることが判断されると、地図情報からその道路情報が取得される(ステップST183)。その後、シーケンスはステップST185に進む。一方、ステップST182で、選択された道路が地図情報に含まれる道路情報でない、つまり新規道路情報に含まれる道路であることが判断されると、新規道路情報からその道路情報が取得される(ステップST184)。その後、シーケンスはステップST185に進む。
【0148】
ステップST185では、取得された道路情報から道路種別が取得される。次いで、現在選択されている道路とその道路種別の組が一時記憶メモリ18に記憶される(ステップST186)。その後、シーケンスはステップST180に戻り、上述した処理が繰り返される。
【0149】
以上説明したように、この発明の実施の形態8に係る地図情報処理装置によれば、仮交差点で交差している高速道路を走行したときに、仮交差点を立体交差と判断できる。また、高速道路における仮交差点を自動的に立体交差であると判断できる。
【0150】
なお、上述した実施の形態8に係る地図情報処理装置では、地図情報処理装置の電源OFF時に一時記憶メモリ18に記憶されている有料道路走行中時をバックアップRAM29に保存し、電源ON時にバックアップRAM29から読み出して一時記憶メモリ18にリストアするように構成したが、バックアップRAM29の替わりにHDD16を用いることもできる。
【0151】
実施の形態9.
この発明の実施の形態9に係る地図情報処理装置は、高架下を走行したという情報に基づいて仮交差点の状態を設定するようにしたものである。
【0152】
図32は、この発明の実施の形態9に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置に、照度計51が追加されるとともに、カーナビゲーション装置に照度計測手段31および高架下通過検出手段32が追加されて構成されている。また、交差点決定手段23の動作が実施の形態1に係る地図情報処理装置のそれと異なる。
【0153】
照度計51は、移動体(車両)に照射される光量を検出する。この照度計51で検出された光量は、照度計測手段31に送られる。照度計測手段31は、接続されている照度計51を用い、移動体に照射される光量を計測する。高架下通過検出手段32は、移動体が高架下を通過したことを検出する。この高架下通過検出手段32の詳細は後述する。
【0154】
次に、この発明の実施の形態9に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図33および図34に示すフローチャートを参照しながら説明する。
【0155】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に接続された道路を仮交差点方向へ走行中であるかどうかが調べられる(ステップST190)。ここで、仮交差点方向へ走行中でないことが判断されると、処理は終了する。一方、仮交差点方向へ走行中であることが判断されると、測位待ちに入る(ステップST191)。
【0156】
次いで、地図情報処理装置が仮交差点に接近したかどうかが調べられる(ステップST192)。より詳しくは、測位手段15によって測位された自己の現在位置と仮交差点との間の距離が、予め定められた距離以内になったかどうかが調べられる。このステップST192において、仮交差点に接近していないことが判断されると、シーケンスはステップST191に戻り、再び測位待ちに入る。一方、ステップST192において、仮交差点に接近したことが判断されると、次いで、高架下通過判定処理が行われる(ステップST193)。この高架下通過判定処理は、高架下通過検出手段32により実行されるものであり、高架構造物の有無を検出する。この高架下通過判定処理の詳細は後述する。
【0157】
次いで、高架下を通過したかどうか、つまり高架構造物があるかどうかが調べられる(ステップST194)。ここで、高架下を通過していないことが判断されると、処理は終了する。一方、ステップST194において、高架下を通過したことが判断されると、仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST195)。次いで、その仮交差点における仮交差点フラグがOFFに変更される(ステップST196)、以上により、処理は終了する。
【0158】
図34は、図33のステップST193で実行される高架下通過判定処理の詳細を示すフローチャートである。この高架下通過判定処理は、高架下通過検出手段32により実行される。
【0159】
高架下通過判定処理では、まず、照度計測手段31によって照度が計測され、直前照度情報として一時記憶メモリ18に記憶される(ステップST200)。次いで、測位手段15による測位待ちに入る(ステップST201)。次いで、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST202)。ここで、仮交差点に到達していないことが判断されると、シーケンスはステップST201に戻り、再び測位待ちに入る。一方、ステップST202において、仮交差点に到達したことが判断されると、次いで、照度計測手段31によって照度が計測され、交差点照度情報として一時記憶メモリ18に記憶される(ステップST203)。
【0160】
次いで、測位手段15による測位待ちに入る(ステップST204)。次いで、地図情報処理装置が仮交差点から脱出したかどうかが調べられる(ステップST205)。ここで、仮交差点から脱出していないことが判断されると、シーケンスはステップST204に戻り、再び測位待ちに入る。一方、ステップST205において、仮交差点から脱出したことが判断されると、次いで、照度計測手段31によって照度が計測され、直後照度情報として一時記憶メモリ18に記憶される(ステップST206)。
【0161】
その後、一時記憶メモリ18に記憶されている3種類の照度情報から、高架構造物の検出が行われる。即ち、まず、直前照度情報と交差点照度情報とが比較され、交差点での照度が交差点直前での照度よりも急激に減少しているかどうかが調べられる(ステップST207)。ここで、急激に減少していないことが判断されると、処理は終了する。一方、ステップST207で、急激に減少したことが判断されると、次いで、直前照度情報と直後照度情報とが比較され、交差点直前での照度と交差点直後での照度の差がある一定値以内であるかどうかが調べられる(ステップST208)。
【0162】
このステップST208で、一定値以内でないことが判断されると、処理は終了する。一方、一定値以内であることが判断されると、その交差地点には高架構造物が存在すると判断され、高架下を通過したことが判定される(ステップST209)。以上により、高架下通過検出手段32による高架下通過判定処理は終了する。
【0163】
以上説明したように、この発明の実施の形態9に係る地図情報処理装置によれば、仮交差点に高架道路があるときに、仮交差点を自動的に立体交差であると判断できる。また、仮交差点において照度の変化によって高架をくぐったことを判断し、仮交差点を自動的に立体交差であると判断できる。
【0164】
実施の形態10.
この発明の実施の形態10に係る地図情報処理装置は、GPS衛星および準天頂衛星の捕捉の可否に基づいて仮交差点の状態を設定するようにしたものである。
【0165】
図35は、この発明の実施の形態10に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置に、準天頂衛星受信アンテナ52が追加されるとともに、カーナビゲーション装置に高架下通過検出手段32および捕捉衛星検出手段33が追加されて構成されている。また、交差点決定手段23の動作が実施の形態1に係る地図情報処理装置のそれと異なる。
【0166】
交差点決定手段23の構成および動作は、実施の形態9に係る地図情報処理装置のそれと同じである。
【0167】
捕捉衛星検出手段33は、接続されているGPS受信アンテナ45からのGPS信号および準天頂衛星受信アンテナ52からの準天頂信号に基づいて、捕捉可能なGPS衛星や準天頂衛星を検出し、GPS衛星および準天頂衛星がどの方向に捕捉できているかを算出する。
【0168】
次に、この発明の実施の形態10に係る地図情報処理装置の高架下通過検出手段32において行われる処理を、図36および図37に示すフローチャートを参照しながら説明する。
【0169】
この仮交差点の状態を設定する処理では、まず、捕捉衛星検出手段33によって捕捉できる衛星が検出され、捕捉できた衛星の中で、天頂付近、例えば仰角が75度以上の衛星の方向および衛星を特定するIDが、直前衛星情報として一時記憶メモリ18に記憶される(ステップST210)。その後、測位手段15による測位待ちに入る(ステップST211)。
【0170】
次いで、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST212)。ここで、仮交差点に到達していないことが判断されると、シーケンスはステップST211に戻り、再び測位待ちに入る。一方、ステップST212において、仮交差点に到達したことが判断されると、次いで、ステップST210における処理と同様に、天頂付近で捕捉できた衛星の情報が交差点衛星情報として一時記憶メモリ18に記憶される(ステップST213)。その後、測位手段15による測位待ちに入る(ステップST214)。
【0171】
次いで、地図情報処理装置が仮交差点から脱出したかどうかが調べられる(ステップST215)。ここで、仮交差点から脱出していないことが判断されると、シーケンスはステップST214に戻り、再び測位待ちに入る。一方、ステップST215において、仮交差点から脱出したことが判断されると、次いで、ステップST210における処理と同様に、天頂付近で捕捉できた衛星の情報が直後衛星情報として一時記憶メモリ18に記憶される(ステップST216)。
【0172】
次いで、一時記憶メモリ18に記憶されている3種類の衛星情報から高架判定処理が行われる(ステップST217)。この高架判定処理は、高架下通過検出手段32により実行される。図37は、このステップST217で実行される高架判定処理の詳細を示すフローチャートである。
【0173】
この高架判定処理では、まず、一時記憶メモリ18に記憶されている直前衛星情報が参照され、その中に準天頂衛星が捕捉されている情報があるかどうかが調べられる(ステップST220)。このステップST220において、準天頂衛星が捕捉されている情報があることが判断されると、次いで、一時記憶メモリ18に記憶されている交差点衛星情報が参照され、その中に準天頂衛星が補足されている情報があるかどうかが調べられる(ステップST221)。
【0174】
このステップST221において、準天頂衛星が補足されている情報がないことが判断されると、一時記憶メモリ18に記憶されている直後衛星情報が参照され、その中に準天頂衛星が補足されている情報があるかどうかが調べられる(ステップST222)。このステップST222において、準天頂衛星が補足されている情報があることが判断されると、仮交差点において高架下を通過したと判定され(ステップST223)、高架判定処理は終了する。
【0175】
上記ステップST220において準天頂衛星が捕捉されている情報がないことが判断された場合、または上記ステップST221において準天頂衛星が捕捉されている情報があることが判断された場合、または上記ステップST222において準天頂衛星が捕捉されている情報がないことが判断された場合、直前衛星情報が参照され、天頂付近(予め天頂付近の範囲を定めておく。例えば、仰角75度以上など)で捕捉されているGPS衛星が抽出される(ステップST224)。次いで、一時記憶メモリ18に記憶されている交差点衛星情報が参照され、ステップST224において抽出された全てのGPS衛星が交差点衛星情報の中で捕捉されていないかどうかが調べられる(ステップST225)。ここで、ステップST224で抽出された全てのGPS衛星が交差点衛星情報で補足できていないことが判断されると、それらの抽出されたGPS衛星が、一時記憶メモリ18に記憶されている直後衛星情報の中で捕捉されているかどうかが調べられる(ステップST226)。
【0176】
このステップST226において、全ての衛星が捕捉されていることが判断されると、シーケンスはステップST223へ移り、そうでない場合は、高架判定処理は終了する。上記ステップST225において、ステップST224で抽出された全てのGPS衛星が交差点衛星情報で補足できていないと判断されなかった場合は、高架判定処理は終了する。
【0177】
以上説明したように、この発明の実施の形態10に係る地図情報処理装置によれば、仮交差点において捕捉できる衛星の変化によって高架をくぐったことを判断し、仮交差点を自動的に立体交差であると判断できる。
【0178】
実施の形態11.
この発明の実施の形態11に係る地図情報処理装置は、DSRC(Dedicated Short Range Communication :専用狭帯域通信)により得られた信号に基づいて仮交差点の状態を設定するようにしたものである。
【0179】
図38は、この発明の実施の形態11に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置に、DSRCアンテナ53が追加されるとともに、カーナビゲーション装置にDSRC送受信手段34が追加されて構成されている。また、交差点決定手段23の動作が実施の形態1に係る地図情報処理装置のそれと異なる。DSRC送受信手段34および交差点決定手段23は、この発明の受信手段に対応する。
【0180】
DSRC送受信手段34は、DSRCアンテナ53に接続されており、このDSRCアンテナ53によって受信された信号を処理するとともに、DSRCアンテナ53を介して外部に情報を送信する。
【0181】
なお、以下では、交差点付近に、その交差点の交差点状況(立体交差か平面交差点か)と交差点位置(緯度および経度)が保持されており、これらの情報をDSRC信号として発信するDSRC路側機(図示しない)が設置されているものとする。
【0182】
次に、この発明の実施の形態11に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図39に示すフローチャートを参照しながら説明する。
【0183】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が交差点状況を表すDSRC信号を受信したかどうかが調べられる(ステップST230)。ここで、DSRC信号を受信していないことが判断されると、処理は終了する。一方、DSRC信号を受信したことが判断されると、次いで、当該交差点に該当する仮交差点が新規道路情報および地図情報から検索される(ステップST231)。この検索は、DSRC路側機から受信したDSRC信号に含まれる交差点位置を表す情報に基づいて行われる。
【0184】
次いで、ステップST231における検索結果に基づき、当該交差点に該当する仮交差点があるかどうかが調べられる(ステップST232)。ここで、仮交差点がないことが判断されると、処理は終了する。一方、仮交差点が有ることが判断されると、次いで、その仮交差点が立体交差であるかどうかが調べられる(ステップST233)。これは、DSRC路側機から受信したDSRC信号に含まれる交差点状況を調べることにより行われる。
【0185】
このステップST233において、立体交差であることが判断されると、次いで、その仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST234)。次いで、その仮交差点における仮交差点フラグがOFFに変更される(ステップST235)。その後、処理は終了する。ステップST233において、立体交差でないことが判断されると、次いで、その仮交差点が平面交差であるかどうかが調べられる(ステップST236)。これは、DSRC路側機から受信したDSRC信号に含まれる交差点状況を調べることにより行われる。このステップST236において、平面交差であることが判断されるとシーケンスはステップST235に移る。一方、平面交差でないことが判断されると、処理は終了する。
【0186】
以上説明したように、この発明の実施の形態11に係る地図情報処理装置によれば、外部のDSRC路側機から取得した情報に基づいて平面交差と立体交差を区別できる。
【0187】
なお、上述した実施の形態11に係る地図情報処理装置では、交差点付近に設置されたDSRC路側機に交差点状況が保持されている場合について説明したが、複数のDSRC路側機を接続する情報センタで各交差点の交差点状況を保持しておき、DSRC路側機に配信するように構成することもでき、この構成によっても上述した効果と同様の効果が得られる。この場合、情報センタとしては、交差点状況の情報配信を専用に行うセンタや、インターネット上で地図情報を提供しているサービスプロバイダや、他車が検知した情報をプローブ的に配信するセンタなどを利用することができる。また、通信手段としては、DSRC通信以外の通信、例えば、無線LANによる通信を用いることができる。
【0188】
実施の形態12.
この発明の実施の形態12に係る地図情報処理装置は、DSRC通信により情報センタから取得した情報に基づいて仮交差点の状態を設定するようにしたものである。
【0189】
この実施の形態12に係る地図情報処理装置の構成は、図39に示した実施の形態11に係る地図情報処理装置の構成と同じである。ただし、交差点決定手段23の動作は実施の形態11に係る地図情報処理装置のそれと異なる。
【0190】
なお、以下では、交差点が立体交差か平面交差点を示す交差点状況のデータベースを管理し、地図情報処理装置からの要求に応じ交差点状況を配信する情報センタ(図示しない)が設置されているものとする。
【0191】
次に、この発明の実施の形態12に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図40に示すフローチャートを参照しながら説明する。
【0192】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST240)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、DSRC通信が可能であるかどうかが調べられる(ステップST241)。ここで、DSRC通信が不可能であることが判断されると、処理は終了する。一方、DSRC通信が可能であることが判断されると、次いで、仮交差点の交差点状況配信が情報センタに要求される(ステップST242)。これは、当該仮交差点の位置情報または当該仮交差点を特定するための位置以外のユニークな識別子を情報センタに送信することにより行われる。
【0193】
その後、交差点状況の受信待ちに入る(ステップST243)。次いで、交差点状況が受信されたかどうかが調べられる(ステップST244)。ここで、交差点状況が受信されていないことが判断されると、シーケンスはステップST243に戻り、再び交差点状況の受信待ちに入る。一方、ステップST244において、交差点状況が受信されたことが判断されると、次いで、受信された交差点状況を参照し、当該仮交差点が立体交差であるか否かが調べられる(ステップST245)。
【0194】
ステップST245において、その仮交差点が立体交差であることが判断されると、その仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST246)。次いで、その仮交差点における仮交差点フラグがOFFに変更される(ステップST247)。その後、処理は終了する。ステップST245において、立体交差でないことが判断されると、次いで、その仮交差点が平面交差であるかどうかが調べられる(ステップST248)。ここで、平面交差であることが判断されるとシーケンスはステップST247に移る。一方、平面交差でないことが判断されると、処理は終了する。
【0195】
以上説明したように、この発明の実施の形態12に係る地図情報処理装置によれば、外部の情報センタからDSRC路側機を介して取得した情報に基づいて平面交差と立体交差を区別できる。
【0196】
なお、上述した実施の形態12に係る地図情報処理装置では、DSRC通信によって交差点状況配信要求を情報センタに送信し、情報センタから交差点状況を受信するように構成したが、通信は、DSRC通信に限らず、例えば、携帯電話によって情報センタと通信するように構成することもできる。この場合も上述した効果と同様の効果を得ることができる。また、通信としては、1つ以上の衛星を常に天頂付近で捕捉することができる準天頂衛星を介した通信、通信衛星による通信、あるいは、無線LANによる通信を用いることもでき、これらの場合も上述した効果と同様の効果を得ることができる。
【0197】
実施の形態13.
この発明の実施の形態13に係る地図情報処理装置は、放送により得られた信号に基づいて仮交差点の状態を設定するようにしたものである。
【0198】
図41は、この発明の実施の形態13に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置に、放送受信アンテナ54が追加されるとともに、カーナビゲーション装置に放送信号処理手段35が追加されて構成されている。また、交差点決定手段23の動作が実施の形態1に係る地図情報処理装置のそれと異なる。
【0199】
放送信号処理手段35は、放送受信アンテナ54によって受信された信号を処理し、カーナビゲーション装置の各部で利用可能なデータに変換する。放送信号処理手段35および放送受信アンテナ54は、この発明の受信手段に対応する。放送局は、交差点の位置情報(または、交差点を特定するユニークな識別子)と交差点状況(立体交差か平面交差点か)とを一組とする情報を保持しており、放送電波を使って放送する。
【0200】
次に、この発明の実施の形態13に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図42に示すフローチャートを参照しながら説明する。この処理は、道路情報更新手段24によって地図情報の更新および新規道路情報の追加記憶が完了した後に行われる。
【0201】
この仮交差点の状態を設定する処理では、まず、道路情報更新手段24による地図情報の更新および新規道路情報の追加記憶によって新たな仮交差点が登録されたかどうかが調べられる(ステップST250)。ここで、新たな仮交差点が登録されていないことが判断されると、処理は終了する。一方、新たな仮交差点が登録されたことが判断されると、次いで、放送されている交差点の位置情報(または識別子)と交差点状況が受信される(ステップST251)。
【0202】
次いで、受信が完了したかどうかが調べられる(ステップST252)。ここで、受信が完了していないことが判断されると、シーケンスはステップST251に戻り、交差点の位置情報と交差点状況の受信が継続される。一方、受信が完了したことが判断されると、次いで、状態を未確認の仮交差点、つまり立体交差か平面交差点かの判定が行われていない仮交差点が残っているかどうかが調べられる(ステップST253)。ここで、未確認の仮交差点が残っていないことが判断されると、処理は終了する。
【0203】
上記ステップST253において、未確認の仮交差点が残っていることが判断されると、状態を未確認の仮交差点から1つが選択される(ステップST254)。次いで、選択された仮交差点について、受信された情報の中から交差点状況が検索される(ステップST255)。ここでは、位置情報やユニークな識別子を利用して検索が行われる。次いで、ステップST255における検索の結果、当該仮交差点の交差点状況が存在するかどうかが調べられる(ステップST256)。ここで、該当する交差点状況が存在しないことが判断されると、信号はステップST253に戻る。
【0204】
上記ステップST256において、該当する交差点状況が存在することが判断されると、その交差点状況が参照され、その仮交差点が立体交差であるかどうかが調べられる(ステップST257)。ここで、立体交差であることが判断されると、その仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST258)。次いで、その仮交差点における仮交差点フラグがOFFに変更される(ステップST259)、その後、シーケンスはステップST253に戻る。上記ステップST257において、立体交差でないことが判断されると、その交差点は平面交差点であると判断され、シーケンスはステップST259に移る。
【0205】
以上説明したように、この発明の実施の形態13に係る地図情報処理装置によれば、外部からの放送を受信することにより取得した情報に基づいて平面交差と立体交差を区別できる。
【0206】
なお、上述した実施の形態13に係る地図情報処理装置では、交差点決定手段23による処理が開始されるたびに、放送される交差点位置情報および交差点状況を受信するように構成したが、一度受信したこれらの情報を一時記憶メモリ18またはHDD16に記憶しておき、次に交差点決定手段23による処理が行われる場合は、一時記憶メモリ18またはHDD16に記憶されている交差点位置情報および交差点状況を利用するように構成できる。この構成によれば、放送の受信処理を省略することができるので、処理を高速化することができる。
【0207】
実施の形態14.
この発明の実施の形態14に係る地図情報処理装置は、受信計画を作成し、この作成された受信計画に従って行われた放送から取得した信号に基づいて仮交差点の状態を設定するようにしたものである。
【0208】
この実施の形態14に係る地図情報処理装置の構成は、図41に示した実施の形態13に係る地図情報処理装置の構成と同じである。ただし、交差点決定手段23の動作は実施の形態13に係る地図情報処理装置のそれと異なる。
【0209】
次に、この発明の実施の形態14に係る地図情報処理装置の交差点決定手段23において行われる仮交差点の状態を設定する処理を、図43および図44に示すフローチャートを参照しながら説明する。この処理は、道路情報更新手段24によって地図情報の更新および新規道路情報の追加記憶が完了した後に行われる。
【0210】
図43は、放送局から放送されるメッシュ単位の交差点状況配信計画から、必要な交差点状況の受信計画を作成する処理を示すフローチャートである。図44は、受信計画に基づいて交差点状況を受信し、仮交差点の設定を行う処理を示すフローチャートである。交差点決定手段23は、図43に示す処理と図44に示す処理を並列で実行する。
【0211】
まず、受信計画を作成する処理を、図43に示すフローチャートを参照しながら説明する。この処理では、まず、道路情報更新手段24による地図情報の更新および新規道路情報の追加記憶において新たな仮交差点が登録されたか否かが調べられる(ステップST260)。ここで、新たな仮交差点が登録されていないことが判断されると、処理は終了する。
【0212】
ステップST260において、新たな仮交差点が登録されたことが判断されると、次いで、一時記憶メモリ18に交差点状況の受信計画が記憶されているかどうかが調べられる(ステップST261)。ここで、交差点状況の受信計画が記憶されていることが判断されると、次いで、一時記憶メモリ18に記憶されている受信計画の中に、新たに登録された仮交差点を含むメッシュに該当する受信計画が含まれているかどうかが調べられる(ステップST262)。
【0213】
このステップST262で、該当する受信計画が含まれていないことが判断されると、処理は終了する。一方、該当する受信計画が含まれていることが判断されると、放送局が放送するメッシュ単位の交差点状況配信計画が受信される(ステップST263)。次いで、受信された配信計画から、新たに登録された仮交差点を含むメッシュの交差点状況配信時刻が検索され、一時記憶メモリ18に記憶されている受信計画に、当該メッシュの受信計画が追加される(ステップST264)。その後、処理は終了する。上記ステップST261において、交差点状況の受信計画が記憶されていることが判断された場合は、シーケンスはステップST263に進む。この場合は、受信計画自体が一時記憶メモリ18の内部に新規に作成される。
【0214】
次に、受信計画に基づいて交差点状況を受信し、仮交差点の設定を行う処理を、図44に示すフローチャートを参照しながら説明する。この処理では、まず、受信計画が一時記憶メモリ18に記憶されているか否かが調べられる(ステップST270)。ここで、受信計画が記憶されていないことが判断されると、処理は終了する。一方、受信計画が記憶されていることが判断されると、タイマの確認が行われる(ステップST271)。次いで、タイマが受信計画に記録された時刻であるか否かが調べられる(ステップST272)。ここで、受信計画に記録された時刻でないことが判断されると、シーケンスはステップST271に戻り、再度、タイマの確認が行われる。
【0215】
上記ステップST272において、受信計画に記録された時刻であることが判断されると、次いで、該当するメッシュの交差点状況が受信される(ステップST273)。次いで、当該メッシュ内に交差点状況が未確認である仮交差点が残っているかどうかが調べられる(ステップST274)。ここで、未確認である仮交差点が残っていないことが判断されると、次いで、一時記憶メモリ18に記憶されている受信計画から、当該メッシュに該当する交差点状況の受信計画が削除される(ステップST275)。なお、受信計画の中が空になった場合は、受信計画自体が一時記憶メモリ18から削除される。その後、シーケンスはステップST270に戻る。
【0216】
上記ステップST274において、未確認である仮交差点が残っていないことが判断されると、以下、ステップST276〜ST281の処理が実行される。これらステップST276〜ST281の処理は、実施の形態13に係る地図情報処理装置において、図42のフローチャートに示したステップST254〜ST259の処理とそれぞれ同じであるので説明を省略する。
【0217】
以上説明したように、この発明の実施の形態14に係る地図情報処理装置によれば、外部からの放送を受信することにより取得した情報に基づいて平面交差と立体交差を区別できる。この場合、受信計画を作成し、この作成された受信計画に従って、放送から平面交差と立体交差を区別するための情報を取得するように構成したので、放送の有無を常時調べる必要がない。したがって、処理効率を向上させることができる。
【0218】
なお、上述した実施の形態14に係る地図情報処理装置では、道路情報更新手段24によって新たな仮交差点が登録されたときに、受信計画の作成を行うように構成したが、地図情報処理装置の起動時に受信計画の作成を行うように構成することもできる。
【0219】
実施の形態15.
この発明の実施の形態15に係る地図情報処理装置は、仮交差点を検出する以前に、仮交差点の存在を予見し、未登録高架下情報として保持しておくことにより、仮交差点が生成された時に、立体交差であるかどうかを判断するようにしたものである。
【0220】
図45は、この発明の実施の形態15に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図25に示した実施の形態7に係る地図情報処理装置のカーナビゲーション装置に高架下通過検出手段32と未登録高架下通過判定手段36が追加されて構成されている。また、HDD16の内部に未登録高架下情報記憶手段16dが追加されている。また、交差点決定手段23の動作が実施の形態7に係る地図情報処理装置のそれと異なる。
【0221】
映像信号処理手段27は、撮影装置47によって撮影することにより得られた画像信号を、カーナビゲーション装置内の各部で処理できるデータに変換する。高架下通過検出手段32は、映像信号処理手段27によって生成された画像から、現在走行中の道路を横切る高架構造物(高架道路、高架鉄道など)を検出する。また、未登録高架下通過判定手段36は、未登録の高架構造物の下を通過したかどうかを判定する。この未登録高架下通過判定手段36の詳細は後述する。
【0222】
次に、この発明の実施の形態15に係る地図情報処理装置の動作を説明する。図47は、撮影装置47を用いて未登録高架下情報を作成する動作を示すフローチャートである。図48は、図47における未登録高架下通過判定処理の詳細を示すフローチャートである。
【0223】
まず、図46に示すフローチャートを参照しながら、地図情報処理装置の動作を説明する。まず、移動体(車両)の上方が撮影装置47によって撮影される(ステップST290)。映像信号処理手段27は、撮影装置47からの信号に基づき画像を生成する。次いで、映像信号処理手段27によって生成された画像に基づき高架構造物が有るかどうかが調べられる(ステップST291)。即ち、高架下通過検出手段32は、映像信号処理手段27によって生成された画像から、現在走行中の道路を横切る高架構造物(高架道路、高架鉄道など)があるかどうかを調べる。このステップST291で、高架構造物がないことが判断されると、シーケンスはステップST290に戻る。
【0224】
上記ステップST291において、高架構造物があることが判断されると、次いで、未登録高架下通過判定手段36によって、未登録高架下通過判定処理が行われる(ステップST292)。この未登録高架下通過判定処理の詳細は後述する。次いで、終了信号を受信したかどうかが調べられる(ステップST293)。ここで、終了シーケンスを受信したことが判断されると、処理は終了する。一方、終了信号を受信していないことが判断されると、シーケンスはステップST290に戻り、再度、上方の撮影が行われる。
【0225】
図47は、図46のステップST292で実行される未登録高架下通過判定処理の詳細を示すフローチャートである。この未登録高架下通過判定処理は、高架下通過検出手段32により実行される。
【0226】
未登録高架下通過判定処理では、まず、現在位置を含むメッシュに該当する地図情報がHDD16の内部の地図情報記憶手段16aに存在するか否かが調べられる(ステップST300)。ここで、存在しないことが判断されると、シーケンスはステップST303に進む。一方、存在することが判断されると、次いで、該当する地図情報が一時記憶メモリ18に読み出される(ステップST301)。次いで、読み出された地図情報から当該地点を通過する道路情報が取得される(ステップST302)。
【0227】
次いで、現在位置を含むメッシュに該当する新規道路情報がHDD16内の新規道路情報記憶手段16bに存在するかどうかが調べられる(ステップST303)。ここで、存在しないことが判断されると、シーケンスはステップST306に進む。一方、存在することが判断されると、次いで、該当する新規道路情報が一時記憶メモリ18に読み出される(ステップST304)。次いで、読み出された新規道路情報から当該地点を通過する道路情報が取得される(ステップST305)。
【0228】
次いで、ステップST302で取得された道路情報とステップST305で取得された道路情報から、当該地点における高架構造物状況が算出される(ステップST306)。次いで、ステップST306における算出結果に基づき、その構造物が高架であるかどうかが調べられる(ステップST307)。ここで、高架であることが判断されると、処理は終了する。一方、高架でないことが判断されると、当該地点についHDD16の地図情報記憶手段16aに記憶されている地図情報および新規道路情報記憶手段16bに記憶されている新規道路情報には含まれていない高架構造物の存在を示す未登録高架下情報が作成され、HDD16の未登録高架下情報記憶手段16dに記憶される(ステップST308)。その後、処理は終了する。
【0229】
次に、この発明の実施の形態15に係る地図情報処理装置の交差点決定手段23において行われる、未登録高架下情報を利用して仮交差点の状態を設定する処理を、図48に示すフローチャートを参照しながら説明する。
【0230】
この仮交差点の状態を設定する処理では、まず、地図情報処理装置が仮交差点に到達したかどうかが調べられる(ステップST310)。ここで、仮交差点に到達していないことが判断されると、処理は終了する。一方、仮交差点に到達したことが判断されると、次いで、HDD16の未登録高架下情報記憶手段16dに記憶されている未登録高架下情報から当該地点の情報が検索される(ステップST311)。次いで、ステップST311における検索結果に基づき、当該地点の情報が存在するかどうかが調べられる(ステップST312)。
【0231】
このステップST312で、当該地点の情報が存在しないことが判断されると、処理は終了する。一方、当該地点の情報が存在することが判断され、その情報が立体交差を示していれば、仮交差点における通行規制が、その全組合せについてOKからNGに変更される(ステップST313)。次いで、当該仮交差点における仮交差点フラグがOFFに変更される(ステップST314)。その後、処理は終了する。
【0232】
以上説明したように、この発明の実施の形態15に係る地図情報処理装置によれば、地図情報記憶手段16aや新規道路情報記憶手段16bに記憶されていない新規道路が既存道路を高架で横切っていることを検出しておくことにより、仮交差点を自動的に立体交差と判断できる。
【0233】
実施の形態16.
この発明の実施の形態16に係る地図情報処理装置は、高度情報に基づいて仮交差点の登録の要否を判断するようにしたものである。
【0234】
この実施の形態16に係る地図情報処理装置の構成は、以下の点を除き、図1に示した実施の形態1に係る地図情報処理装置のそれと同じである。即ち、地図情報記憶手段16aに記憶される地図情報に含まれる道路情報は、ノードに関連付けられた情報として、そのノードの高度情報を予め含んでいる。また、新規道路情報記憶手段16bに記憶される新規道路情報には、ノードに関連付けられた情報として、そのノードの高度情報が含まれる。この高度情報は、測位手段15がGPS受信アンテナ45から得られるGPS信号に基づいて生成される。
【0235】
また、交差判定手段20は、高度情報を用いて平面交差点か立体交差かの判定を行う。また、道路更新情報生成手段21は、仮交差点を生成しない。交差判定手段20が判定した交差地点は全て平面交差点とする。また、この地図情報処理装置では、仮交差点がないので、ユーザに問い合わせることはない。したがって、実施の形態1に係る地図情報処理装置における交差点問合せ手段22は存在しない。さらに、測位手段15は高さを含めた3次元測位を行う。
【0236】
次に、この発明の実施の形態16に係る地図情報処理装置の交差判定手段20において行われる交差判定処理を、図49に示すフローチャートを参照しながら説明する。
【0237】
図49のフローチャートに示す交差判定処理のステップST320〜ST327の処理は、図5のフローチャートに示す実施の形態1に係る地図情報処理装置における交差判定処理のステップST40〜ST47の処理とそれぞれ同じである。したがって、以下では、相違する部分についてのみ説明する。
【0238】
ステップST327において、選択された線分と選択された近傍道路とが交差していることが判断されると、次いで、交差地点における選択線分の高さが算出される(ステップST328)。交差地点の高さは、選択された線分の両端における高さに基づき、両端からの距離の比で算出される。次いで、交差地点における選択された線分と交差する近傍道路の高さが算出される(ステップST329)。この交差地点の高さは、近傍道路の両端における高さに基づき、両端からの距離の比で算出される。
【0239】
次いで、ステップST328で算出された高さとステップST329で算出された高さの差が予め定められた一定値以上であるかどうかが調べられる(ステップST330)。ここで、一定値以上でないことが判断されると、交差情報が一時記憶メモリ18に一時記憶される(ステップST331)。その後、シーケンスはステップST321に戻る。一方、ステップST330において、一定値以上であることが判断されると、その交差地点は立体交差であると認識され、交差点情報を作成することなく、シーケンスはステップST321に戻る。
【0240】
以上説明したように、この発明の実施の形態16に係る地図情報処理装置によれば、新規道路を検出中に高度情報によって立体交差であることが判断されると交差情報を格納しないので、不要な仮交差点の発生を抑制することができる。
【0241】
実施の形態17.
この発明の実施の形態17に係る地図情報処理装置は、撮影装置で撮影することにより得られた画像情報に基づいて仮交差点の登録の要否を判断するようにしたものである。
【0242】
この実施の形態17に係る地図情報処理装置の構成は、以下の点を除き、図25に示した実施の形態7に係る地図情報処理装置のそれと同じである。即ち、道路更新情報生成手段21では、仮交差点は生成されない。交差判定手段20が判定した交差地点は全て平面交差点とする。また、この地図情報処理装置では、仮交差点がないので、ユーザに問い合わせることはない。したがって、実施の形態1に係る地図情報処理装置における交差点問合せ手段22は存在しない。
【0243】
次に、この発明の実施の形態17に係る地図情報処理装置の交差判定手段20において行われる交差判定処理を、図50に示すフローチャートを参照しながら説明する。
【0244】
図50のフローチャートに示す交差判定処理のステップST340〜ST347の処理は、図5のフローチャートに示す実施の形態1に係る地図情報処理装置における交差判定処理のステップST40〜ST47の処理とそれぞれ同じである。したがって、以下では、相違する部分についてのみ説明する。
【0245】
ステップST347において、選択された線分と選択された近傍道路とが交差していることが判断されると、撮影装置47で撮影することにより得られた画像が処理されることにより、当該地点が立体交差か平面交差点かが算出される(ステップST348)。次いで、ステップST348における画像処理の結果に基づき、当該交差地点は立体交差であるかどうかが調べられる(ステップST349)。ここで、立体交差でない(平面交差である)ことが判断されると、交差情報が作成されて一時記憶メモリ18に一時記憶される(ステップST350)。その後、シーケンスはステップST341に戻る。一方、ステップST349において、立体交差であることが判断されると、交差点情報が作成されることなく、シーケンスはステップST341に戻る。
【0246】
以上説明したように、この発明の実施の形態17に係る地図情報処理装置によれば、新規道路を検出中にカメラ画像によって立体交差であることが判断されると交差情報を格納しないので、不要な仮交差点の発生を抑制することができる。
【0247】
実施の形態18.
この発明の実施の形態18に係る地図情報処理装置は、有料道路を走行することにより得られた情報に基づいて仮交差点の登録の要否を判断するようにしたものである。
【0248】
この実施の形態18に係る地図情報処理装置の構成は、以下の点を除き、図27に示した実施の形態8に係る地図情報処理装置のそれと同じである。即ち、この実施の形態18に係る地図情報処理装置では、交差点問合せ手段22が除去されている。
【0249】
次に、この発明の実施の形態18に係る地図情報処理装置の交差判定手段20において行われる交差判定処理を、図51に示すフローチャートを参照しながら説明する。
【0250】
図51のフローチャートに示す交差判定処理のステップST360〜ST367の処理は、図5のフローチャートに示す実施の形態1に係る地図情報処理装置における交差判定処理のステップST40〜ST47の処理とそれぞれ同じである。したがって、以下では、相違する部分についてのみ説明する。
【0251】
ステップST367において、選択された線分と選択された近傍道路とが交差していることが判断されると、次いで、一時記憶メモリ18から有料道路走行中情報を取得できるかどうかが調べられる(ステップST368)。ここで、有料道路走行中情報を取得できることが判断されると、有料道路走行中であり、当該地点は立体交差と認識され、交差情報が生成することなく、シーケンスはステップST361に戻る。
【0252】
ステップST368において、有料道路走行中情報を取得できないことが判断されると、次いで、仮交差点道路種別判定手段30による交差道路種別判定処理が行われる(ステップST369)。この交差道路種別判定処理の詳細は、実施の形態8において、図31のフローチャートを参照して既に説明した。次いで、ステップST369における判定結果に基づいて、当該地点で新規道路と交差する既存道路の道路種別が有料道路であるか否かが調べられる(ステップST370)。
【0253】
このステップST370で、有料道路であることが判断されると、当該地点は立体交差と認識され、交差点情報が作成されることなく、シーケンスはステップST361に戻る。一方、ステップST370において、有料道路でないことが判断されると、平面交差点であることが認識され、交差情報が作成されて一時記憶メモリ18に一時記憶される(ステップST371)。その後、シーケンスはステップST361に戻る。
【0254】
以上説明したように、この発明の実施の形態18に係る地図情報処理装置によれば、新規道路が検出されたときに、不要な仮交差点の発生を抑制することができる。
【0255】
実施の形態19.
この発明の実施の形態19に係る地図情報処理装置は、高架下を走行したという情報に基づいて仮交差点の登録の要否を判断するようにしたものである。
【0256】
この実施の形態19に係る地図情報処理装置の構成は、以下の点を除き、図32に示した実施の形態9に係る地図情報処理装置のそれと同じである。即ち、新規道路検出手段19は、測位手段15によって測位された位置から走行履歴を生成する際に、照度計測手段31によって測定された当該地点での照度を走行履歴に含める。
【0257】
次に、この発明の実施の形態19に係る地図情報処理装置の交差判定手段20において行われる交差判定処理を、図52および図53に示すフローチャートを参照しながら説明する。
【0258】
図52のフローチャートに示す交差判定処理のステップST380〜ST387の処理は、図5のフローチャートに示す実施の形態1に係る地図情報処理装置における交差判定処理のステップST40〜ST47の処理とそれぞれ同じである。したがって、以下では、相違する部分についてのみ説明する。
【0259】
ステップST387において、選択された線分と選択された近傍道路とが交差していることが判断されると、次いで、高架下通過検出手段32による高架構造物検出処理が行われる(ステップST388)。この高架構造物検出処理の詳細は後述する。次いで、ステップST388における高架構造物検出処理の結果に基づいて、交差地点に高架構造物があるかどうかが調べられる(ステップST389)。ここで、交差地点に高架構造物があることが判断されると、シーケンスはステップST381に戻る。一方、ステップST389において、交差地点に高架構造物がないことが判断されると、平面交差点であることが認識され、交差情報が作成されて一時記憶メモリ18に一時記憶される(ステップST390)。その後、シーケンスはステップST381に戻る。
【0260】
次に、上記ステップST388で行われる高架構造物検出処理の詳細を、図53に示すフローチャートを参照しながら説明する。
【0261】
高架構造物検出処理では、まず、走行履歴の中から当該交差地点直前の照度情報が取得される(ステップST400)。次いで、走行履歴の中から当該交差地点における照度情報が取得される(ステップST401)。次いで、走行履歴の中から当該交差地点直後の照度情報が取得される(ステップST402)。次いで、交差地点の照度が直前照度から急激に減少しているか否かが調べられる(ステップST403)。ここで、急激に減少していないことが判断されると、シーケンスはステップST406に進み、交差地点を横切る高架構造物は存在しないと判断される。
【0262】
一方、ステップST403において、急激に減少していることが判断されると、次いで、直後照度が直前照度とほぼ同程度であるか否かが調べられる(ステップST404)。ここで、同程度でないことが判断されると、シーケンスはステップST406に進み、交差地点を横切る高架構造物はないと判断される。一方、ステップST404において、同程度であることが判断されると、シーケンスはステップST405に進み、交差地点を横切る高架構造物が存在すると判断される。
【0263】
以上説明したように、この発明の実施の形態19に係る地図情報処理装置によれば、新規道路を検出中に照度の変化によって高架をくぐったことを判断し、不要な仮交差点の発生を抑制することができる。
【0264】
実施の形態20.
この発明の実施の形態20に係る地図情報処理装置は、GPS衛星および準天頂衛星の捕捉の可否に基づいて仮交差点の登録の要否を判断するようにしたものである。
【0265】
この実施の形態20に係る地図情報処理装置の構成は、以下の点を除き、図35に示した実施の形態10に係る地図情報処理装置のそれと同じである。即ち、新規道路検出手段19は、測位手段15によって測位された位置から走行履歴を生成する際に、捕捉衛星検出手段33によって検出された捕捉衛星の情報を走行履歴に含める。具体的には、当該位置において捕捉できた衛星を特定するID情報とその方向を走行履歴に含める。
【0266】
次に、この発明の実施の形態20に係る地図情報処理装置の交差判定手段20において行われる交差判定処理を、図54に示すフローチャートを参照しながら説明する。
【0267】
この実施の形態20に係る地図情報処理装置の交差判定手段20で行われる処理は、高架構造物検出処理(図52のステップST388)の処理内容を除き、図52のフローチャートに示した実施の形態19に係る地図情報処理装置のそれと同じである。したがって、以下では、高架構造物検出処理についてのみ説明する。
【0268】
図54のフローチャートに示す高架構造物検出処理では、まず、走行履歴の中から当該交差地点直前の衛星情報が取得される(ステップST410)。次いで、走行履歴の中から当該交差地点における衛星情報が取得される(ステップST411)。次いで、走行履歴の中から当該交差地点直後の衛星情報が取得される(ステップST412)。次いで、一時記憶メモリ18に記憶されている直前衛星情報が参照され、その中に準天頂衛星が捕捉されている情報があるかどうかが調べられる(ステップST413)。このステップST413において、準天頂衛星が捕捉されている情報があることが判断されると、次いで、一時記憶メモリ18に記憶されている交差点衛星情報が参照され、その中に準天頂衛星が補足されている情報があるかどうかが調べられる(ステップST414)。
【0269】
このステップST414において、準天頂衛星が補足されている情報がないことが判断されると、一時記憶メモリ18に記憶されている直後衛星情報が参照され、その中に準天頂衛星が補足されている情報があるかどうかが調べられる(ステップST415)。このステップST415において、準天頂衛星が補足されている情報があることが判断されると、シーケンスはステップST416に進み、交差地点を横切る高架構造物があると判断される。
【0270】
上記ステップST413において準天頂衛星が捕捉されている情報がないことが判断された場合、または上記ステップST414において準天頂衛星が捕捉されている情報があることが判断された場合、または上記ステップST415において準天頂衛星が捕捉されている情報がないことが判断された場合、直前衛星情報が参照され、天頂付近(予め天頂付近の範囲を定めておく。例えば、仰角75度以上など)で捕捉されているGPS衛星が抽出される(ステップST417)。次いで、一時記憶メモリ18に記憶されている交差点衛星情報が参照され、ステップST417において抽出された全てのGPS衛星が交差点衛星情報の中で捕捉されていないかどうかが調べられる(ステップST418)。ここで、ステップST417で抽出された全てのGPS衛星が交差点衛星情報で補足できていないことが判断されると、それらの抽出されたGPS衛星が、一時記憶メモリ18に記憶されている直後衛星情報の中で捕捉されているかどうかが調べられる(ステップST419)。
【0271】
このステップST419において、全ての衛星が捕捉されていることが判断されると、シーケンスはステップST416に進み、交差地点を横切る高架構造物があると判断される。一方、ステップST419において、全ての衛星が捕捉されていないことが判断されると、シーケンスはステップST420に進み、交差地点を横切る高架構造物は存在しないと判断される。
【0272】
以上説明したように、この発明の実施の形態20に係る地図情報処理装置によれば、新規道路を検出中に捕捉できる衛星の変化によって高架をくぐったことを判断し、不要な仮交差点の発生を抑制することができる。
【0273】
実施の形態21.
この発明の実施の形態21に係る地図情報処理装置は、予め記憶された高架下を走行したという情報に基づいて仮交差点の登録の要否を判断するようにしたものである。
【0274】
この実施の形態21に係る地図情報処理装置の構成は、図45に示した実施の形態15に係る地図情報処理装置のそれと同じである。
【0275】
次に、この発明の実施の形態21に係る地図情報処理装置の動作を説明する。この地図情報処理装置の交差判定手段20において行われる交差判定処理は、高架構造物検出処理(ステップST388)の処理内容を除き、図52のフローチャートに示した処理と同じである。したがって、以下では、高架構造物検出処理の詳細のみを、図55に示すフローチャートを参照しながら説明する。
【0276】
高架構造物検出処理では、まず、HDD16の未登録高架下情報記憶手段16dに記憶されている未登録高架下情報が読み出される(ステップST430)。次いで、ステップST430において読み出された未登録高架下情報から、当該交差地点に該当する情報が検索される(ステップST431)。そして、該当する情報が存在するかどうかが調べられる(ステップST432)。ここで、該当する情報が存在することが判断されるとシーケンスはステップST433に進み、交差地点を横切る高架構造物があると判断される。一方、該当する情報が存在しないことが判断されるとシーケンスはステップST434に進み、交差地点を横切る高架構造物は存在しないと判断される。
【0277】
以上説明したように、この発明の実施の形態21に係る地図情報処理装置によれば、地図情報記憶手段16aや新規道路情報記憶手段16bに記憶されていない新規道路が既存道路を高架で横切っていることを検出しておくことで、不要な仮交差点の発生を抑制できる。
【0278】
実施の形態22.
この発明の実施の形態22に係る地図情報処理装置は、複数のメッシュにまたがる新規道路が検出された場合に対応できるようにしたものである。
【0279】
図56は、この発明の実施の形態22に係る地図情報処理装置の構成を示すブロック図である。この地図情報処理装置は、図1に示した実施の形態1に係る地図情報処理装置のカーナビゲーション装置にメッシュ移動検出手段37が追加されて構成されている。
【0280】
メッシュ移動検出手段37は、この発明の地図領域移動検出手段に対応し、現在自己が位置しているメッシュを把握し、測位手段15が測位する位置が、把握しているメッシュから隣接するメッシュへ移動したことを検出する。この時、隣接するメッシュを特定するための情報も生成する。
【0281】
次に、この発明の実施の形態22に係る地図情報処理装置の動作を、図57に示すように、メッシュM1の既存道路リンクL10上にある地点P20において逸脱し、メッシュM1と隣接するメッシュM2の既存道路リンクL11上にある地点P30に合流するように走行した場合を例に挙げて説明する。
【0282】
新規道路検出手段19によってP20における逸脱が検出され、走行履歴が蓄積されている状況において、メッシュ移動検出手段37は、測位結果とメッシュM1の領域との比較を行う。この比較の結果、測位結果がメッシュM1から外れると、その外れた方向から移動先のメッシュM2を特定する。このとき、走行履歴としての位置情報の蓄積を一時中止し、メッシュ領域から外れた地点P21を境界端点として走行履歴に記録する。そして、地点P20から地点P21をメッシュM1における新規道路とする。
【0283】
次に、処理を隣のメッシュM2に移し、メッシュM1中の地点P21に該当する地点に境界端点P31を発生させる。そして、地点P30における合流を検知するまで再び走行履歴の蓄積を行う。合流が検知されると、地点P31から地点P30までを、メッシュM2における新規道路とする。
【0284】
道路更新情報生成手段21は、新規道路検出手段19によって生成されたメッシュ単位の走行履歴に基づいて道路更新情報を生成する。すなわち、地点P20と地点P21との間を1つのリンクとし、地点P31と地点P30との間を別の1つのリンクとする。
【0285】
以上説明したように、この発明の実施の形態22に係る地図情報処理装置によれば、複数メッシュにまたがる新規道路を検出した際に、メッシュ単位で区切られた地図情報に対して新規道路を追加することができる。
【0286】
実施の形態23.
この発明の実施の形態23に係る地図情報処理装置は、新規道路および仮交差点を通常の道路および交差点とは異なる形態で出力(表示、音声案内)するようにしたものである。
【0287】
この実施の形態23に係る地図情報処理装置の構成は、図1に示した実施の形態1に係る地図情報処理装置のそれと同じである。
【0288】
図58は、この実施の形態23に係る地図情報処理装置における表示装置40への表示例を示す。表示地図計算手段10は、地図情報および新規道路情報から表示用の地図画像を生成する際に、地図情報に含まれる道路と新規道路情報に含まれる道路とを異なる形態、例えば、線の太さや色を変えたり、文字列で新規道路を示すといった形態で表示する。また、生成される地図画像の範囲に仮交差点が存在する場合、その仮交差点の位置に、ユーザが通常の交差点表示とは異なっていることを容易に認識できるように、特別なマーキングを施して仮交差点が存在することを表示する。
【0289】
また、自己が仮交差点に接続している道路を走行中に、仮交差点までの距離が予め定められた距離になったときに、前方交差点が平面交差点か立体交差かが不明な交差点であることを音声で案内する。
【0290】
以上説明したように、この発明の実施の形態23に係る地図情報処理装置によれば、通常の平面交差点か立体交差かが不明な仮交差点を強調して示すことができる。また、新規道路を強調してユーザに示すことができる。
【0291】
実施の形態24.
この発明の実施の形態24に係る地図情報処理装置は、実施の形態3に加えて、仮交差点が平面交差点か立体交差点かを、自車位置の高さ方向の移動変分を利用して決定するようにしたものである。
【0292】
図59は、この実施の形態24に係る地図情報処理装置の構成を示すブロック図である。図59において、実施の形態3で説明に使用した図19中のブロックと同一のブロックは、基本的に実施の形態3と同様の動作を行なう。但し、以下に示すブロックは異なる動作を行なう。
【0293】
加速度センサ55は、高さ方向を含む3次元の加速度を検出する。なお、図19では、同ブロックの代わりに2次元の角速度センサを使用していた。
測位手段15は、加速度センサ55が検出する3次元加速度を利用して、高さ方向の移動変分を含んだ自車位置を計測する。
【0294】
道路更新情報生成手段21は、新規道路の各座標点に、それぞれの地点における情報として、2次元座標以外に高さ方向の移動変分を追加する。また、生成する仮交差点では、通行規制の初期値として、直進方向を除くその他の全方向を通行不可とする。
交差点決定手段23は、右左折情報に加えて、高さ方向の移動変分の情報も利用する。
【0295】
図60は、この発明の実施の形態24に係る地図情報処理装置において、新規道路の検出を説明するための図である。図60のように、新規道路検出手段19が、既存道路ML1を横切るように新規道路ML2を検出した場合、道路更新情報生成手段21は、それらの2次元交差地点N1が表面交差点か立体交差点か不明なため、図60に示すように、N1に仮交差点を発生させ、直進方向以外の右左折を全て通行不可として新規道路を生成する。またこの時に、新規道路情報には検出方向(ここではP1からQ1に向かって検出したものとする)に従って、新規道路ML2の高さ方向の移動変分も、「高度変化情報」として含むものとする。上記の場合の高さ方向の移動変分をδ1とする。
【0296】
図61は、この発明の実施の形態24に係る地図情報処理装置において、図60の新規道路と既存道路との立体交差を示す図である。前述の新規道路ML2の状況が、実際には図61に示されるような立体交差であった場合を想定する。新規道路ML2は、前述のように新規道路情報記憶手段16bに記憶されているものとする。
【0297】
再び交差点N1付近をP1から進入し、T1で新規道路ML2の高架から側道へ逸れ、側道を下って既存道路ML1との丁字路U1で右折しS1方向へ進んだ場合の高さ方向の移動変分をδ2とする。新規道路ML2における右折直前、即ちP1から仮交差点N1へ至る間の高度変化情報(高さ方向の移動変分δ1)と、今回の走行における右折直前、即ちP1からT1を経由して丁字路U1へ至る間の高さ方向の移動変分(高さ方向の移動変分δ2)は一致しない。
【0298】
図62は、この発明の実施の形態24に係る地図情報処理装置において、図60の新規道路と既存道路との仮交差点を判定する動作を説明するための図である。前述の場合には、交差点決定手段23は、新規道路ML2は既存道路ML1と立体交差している、即ち、仮交差点N1は立体交差点であると判定する。そして、図62に示す道路情報を構築し、図59の地図情報記憶手段16aおよび新規道路情報記憶手段16bに記憶する。
【0299】
一方で、図60のように検出した新規道路ML2と既存道路ML1が、仮交差点N1において通常の平面交差点を形成している場合について説明する。仮交差点N1が平面交差点であれば、右左折する場合でも直進する場合でも、仮交差点N1進入直前の高さ方向の移動変分は高度変化情報と一致する。従って、交差点決定手段23は、仮交差点N1を通常の平面交差点として判定し、同交差点における通行規制を全方位、または、当該進入道路および脱出道路の組合せについて通行可に変更する。
【0300】
図63は、この発明の実施の形態24に係る地図情報処理装置において、新規道路の検出を説明するための図である。図63のように、新規道路検出手段19が、既存道路ML3を横切るように新規道路ML4を検出した場合、道路更新情報生成手段21は、それらの2次元交差地点N2が表面交差点か立体交差点か不明なため、図63に示すように、N2に仮交差点を発生させ、直進方向以外の右左折を全て通行不可として新規道路を生成する。またこの時に、新規道路情報には検出方向(ここではP2からQ2に向かって検出したものとする)に従って、新規道路ML4の高さ方向の移動変分も、「高度変化情報」として含むものとする。この場合の高さ方向の移動変分をδ3とする。
【0301】
図64は、この発明の実施の形態24に係る地図情報処理装置において、図63の新規道路と既存道路との立体交差を示す図である。前述の新規道路ML4の状況が、実際には図64に示されるような立体交差であった場合を想定する。図63に示す新規道路ML4は、前述のように新規道路情報記憶手段16bに記憶されているものとする。
【0302】
再びこの仮交差点N2付近を、R2から進入し、丁字路U2で既存道路ML3から左折して側道へ逸れ、側道を上って、T2で新規道路ML4に合流しQ2方向へ進んだ場合の高さ方向の移動変分をδ4とする。新規道路ML4における仮交差点N2からQ2へ至る間の高度変化情報(高さ方向の移動変分δ3)と、今回の走行における左折直後、即ち丁字路U2からT2を経由してQ2へと至る間の高さ方向の移動変分δ4は一致しない。
【0303】
図65は、この発明の実施の形態24に係る地図情報処理装置において、図63の新規道路と既存道路との仮交差点を判定する動作を説明するための図である。前述の場合には、交差点決定手段23は、新規道路ML4は既存道路ML3と立体交差している、即ち、仮交差点N2は立体交差点であると判定する。そして、図65に示す道路情報を構築し、図59の地図情報記憶手段16aおよび新規道路情報記憶手段16bに記憶する。
【0304】
なお、仮交差点N2が平面交差点である場合には、右左折する場合でも直進する場合でも、交差点脱出直後の高さ方向の移動変分は高度変化情報と一致する。従って、仮交差点N2を平面交差点として判定し、同交差点における通行規制を全方位、または、当該進入道路および脱出道路の組合せについて通行可に変更する。
【0305】
次に、この発明の実施の形態24に係る地図情報処理装置の交差点決定手段23において行われる、仮交差点の状態を設定する処理を、図66に示すフローチャートを参照しながら説明する。なお、図66中で「進入&脱出の組」とは、「進入道路から仮交差点へ侵入し、脱出道路を通って仮交差点から脱出する走行経路の通行規制」のことである。
【0306】
先ず、ステップST440では、仮交差点において、右左折検出手段26が右左折を検出した場合にはステップST441へ進み、右左折を検出しなかった場合には処理は終了する。
ステップST441では、当該仮交差点の立体構造属性を参照し、当該仮交差点が立体交差構造であればステップST442へ進み、そうでなければステップST443へ進む。なお、仮交差点が生成された時点では、その立体構造属性は「平面交差点」と設定される。平面交差点と設定された場合の処理は、図20のステップST92(実施の形態3)と同様である。
ステップST442では、当該交差点の通行規制情報を参照し、当該右左折走行で、当該仮交差点に進入した道路をTL1、当該仮交差点から脱出した道路をTL2とし、当該仮交差点においてTL1から進入し、TL2から脱出する走行経路の通行規制が通行可であれば処理を終了し、そうでなければステップST451へ進む。ステップST451の処理については後述する。
【0307】
ステップST443では、当該仮交差点においてTL1から進入し、TL2から脱出する走行経路の通行規制が通行可であれば処理を終了し、そうでなければステップST444へ進む。
ステップST444では、当該仮交差点においてTL1から進入し、TL2から脱出する走行経路の通行規制以外の、他の走行経路の通行規制中に通行可のものがあればステップST445へ進み、そうでなければステップST448へ進む。ステップST448の処理については後述する。
【0308】
ステップST445では、ステップST444で通行可であった他の走行経路の通行規制を、当該交差点における走行経路の通行規制として、その通行規制情報を「通行可」に変更し、ステップST446へ進む。
ステップST446では、当該仮交差点における残り全ての走行経路の通行規制が通行可であれば、ステップST447へ進み、そうでなければ処理を終了する。
ステップST447では、仮交差点フラグをOFFに設定して終了する。
【0309】
続いて、前述のステップST448へ戻って説明する。ステップST448では、仮交差点進入直前(ステップST440)の高さ方向移動変分の履歴が、交差点進入道路の高さ方向移動変分の状況(高度変化情報)と一致すればステップST449へ進み、一致しなければステップST450へ進む(図60〜62参照)。なお、交差点進入道路の高度変化情報については、図59の地図情報記憶手段16aまたは新規道路情報記憶手段16bを参照する。
【0310】
ステップST449では、仮交差点脱出直後(ステップST440)の高さ方向移動変分の履歴が、交差点脱出道路の高さ方向移動変分の状況(高度変化情報)と一致すればステップST445へ進み、そうでなければステップST450へ進む(図63〜65参照)。ステップST445〜447の処理については前述の通りである。なお、交差点脱出道路の高度変化情報は、図59の地図情報記憶手段16aまたは新規道路情報記憶手段16bを参照する。
【0311】
ステップST450では、当該仮交差点の構造を立体交差構造に変更すると共に、立体構造属性を「立体交差」に変更してステップST451へ進む。
ステップST451では、当該仮交差点においてTL1から進入しTL2から脱出する走行経路の通行規制(ステップST440)を「通行可」に変更し、道路情報を構築して地図情報記憶手段16aおよび新規道路情報記憶手段16bに記憶する。そして、ステップST452へ進む。
ステップST452では、残り全ての走行経路の通行規制が通行可であればステップST453へ進み、そうでなければ処理を終了する。
ステップST453では、仮交差点フラグをOFFに設定して処理を終了する。
【0312】
なお、実施の形態24では、図61でML1が新規道路、ML2が既存道路となる場合でも等しい効果が得られる。また、図64でML3が新規道路、ML4が既存道路となる場合も同様である。
【0313】
以上説明したように、この発明の実施の形態24に係る地図情報処理装置によれば、平面交差点か立体交差点かの判定をより正確に(現状に合うように)行なうことが出来る。
また、その結果、平面交差点か立体交差点かが不明な仮交差点を案内することが無いため、実際には立体交差点である既存道路と新規道路との交差地点を右左折するような経路をユーザに提示することを回避することができる。
【図面の簡単な説明】
【0314】
【図1】この発明の実施の形態1に係る地図情報処理装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係る地図情報処理装置の測位に関するメイン処理を示すフローチャートである。
【図3】図2のステップST15において行われる新規道路検出処理の詳細を示すフローチャートである。
【図4】図2のステップST15において行われる新規道路検出処理に続いて実行される処理を示すフローチャートである。
【図5】図4に示す交差判定処理の詳細を示すフローチャートである。
【図6】この発明の実施の形態24に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図7】図4に示す道路情報更新処理の詳細を示すフローチャートである。
【図8】この発明の実施の形態1に係る地図情報処理装置における新規道路の検出、生成および追加の動作を説明するための図である。
【図9】この発明の実施の形態1に係る地図情報処理装置において、走行軌跡を表す時系列データを一定時間毎に取得する動作を説明するための図である。
【図10】この発明の実施の形態1に係る地図情報処理装置において、走行軌跡を表す時系列データを一定距離毎に取得する動作を説明するための図である。
【図11】この発明の実施の形態1に係る地図情報処理装置において、走行軌跡を表す時系列データを方向変化が発生する毎に取得する動作を説明するための図である。
【図12】この発明の実施の形態1に係る地図情報処理装置において、新規道路が追加された後の道路ネットワークを説明するための図である。
【図13】この発明の実施の形態1に係る地図情報処理装置において使用される道路情報に記述される通行規制を説明するための図である。
【図14】この発明の実施の形態1に係る地図情報処理装置において、仮交差点に右左折が含まれる場合の表示例を示す図である。
【図15】この発明の実施の形態1に係る地図情報処理装置において、仮交差点に右左折が含まれない場合の表示例を示す図である。
【図16】この発明の実施の形態1に係る地図情報処理装置における交差点決定処理を示すフローチャートである。
【図17】この発明の実施の形態2に係る地図情報処理装置において、ユーザが仮交差点の状態を入力するための画面の例を示す図である。
【図18】この発明の実施の形態2に係る地図情報処理装置において、図17に示した画面の提示後に行われる交差点決定処理を示すフローチャートである。
【図19】この発明の実施の形態3に係る地図情報処理装置の構成を示すブロック図である。
【図20】この発明の実施の形態3に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図21】この発明の実施の形態4に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図22】この発明の実施の形態5に係る地図情報処理装置の構成を示すブロック図である。
【図23】この発明の実施の形態5に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図24】この発明の実施の形態6に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図25】この発明の実施の形態7に係る地図情報処理装置の構成を示すブロック図である。
【図26】この発明の実施の形態7に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図27】この発明の実施の形態8に係る地図情報処理装置の構成を示すブロック図である。
【図28】この発明の実施の形態8に係る地図情報処理装置の電源OFF時の終了処理を示すフローチャートである。
【図29】この発明の実施の形態8に係る地図情報処理装置の電源ON時の起動処理を示すフローチャートである。
【図30】この発明の実施の形態8に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図31】図30のステップST175で行われる交差道路種別判定処理の詳細を示すフローチャートである。
【図32】この発明の実施の形態9に係る地図情報処理装置の構成を示すブロック図である。
【図33】この発明の実施の形態9に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図34】図33のステップST193で行われる高架下通過判定処理の詳細を示すフローチャートである。
【図35】この発明の実施の形態10に係る地図情報処理装置の構成を示すブロック図である。
【図36】この発明の実施の形態10に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図37】図36のステップST217で行われる高架判定処理の詳細を示すフローチャートである。
【図38】この発明の実施の形態11に係る地図情報処理装置の構成を示すブロック図である。
【図39】この発明の実施の形態11に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図40】この発明の実施の形態12に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図41】この発明の実施の形態13に係る地図情報処理装置の構成を示すブロック図である。
【図42】この発明の実施の形態13に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図43】この発明の実施の形態14に係る地図情報処理装置において行われる交差点状況の受信計画を作成する処理を示すフローチャートである。
【図44】この発明の実施の形態14に係る地図情報処理装置において行われる受信計画に基づいて仮交差点の設定を行う処理を示すフローチャートである。
【図45】この発明の実施の形態15に係る地図情報処理装置の構成を示すブロック図である。
【図46】この発明の実施の形態15に係る地図情報処理装置において未登録高架下情報を作成する動作を示すフローチャートである。
【図47】図46のステップST292で行われる未登録高架下通過判定処理の詳細を示すフローチャートである。
【図48】この発明の実施の形態15に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【図49】この発明の実施の形態16に係る地図情報処理装置において行われる交差判定処理を示すフローチャートである。
【図50】この発明の実施の形態17に係る地図情報処理装置において行われる交差判定処理を示すフローチャートである。
【図51】この発明の実施の形態18に係る地図情報処理装置において行われる交差判定処理を示すフローチャートである。
【図52】この発明の実施の形態19に係る地図情報処理装置において行われる交差判定処理を示すフローチャートである。
【図53】図52のステップST388で行われる高架構造物検出処理の詳細を示すフローチャートである。
【図54】この発明の実施の形態20に係る地図情報処理装置において行われる交差判定処理を示すフローチャートである。
【図55】この発明の実施の形態21に係る地図情報処理装置において行われる高架構造物検出処理の詳細を示すフローチャートである。
【図56】この発明の実施の形態22に係る地図情報処理装置の構成を示すブロック図である。
【図57】この発明の実施の形態22に係る地図情報処理装置の動作を説明するための図である。
【図58】この発明の実施の形態23に係る地図情報処理装置における表示装置への表示例を示す図である。
【図59】この発明の実施の形態24に係る地図情報処理装置の構成を示すブロック図である。
【図60】この発明の実施の形態24に係る地図情報処理装置において、新規道路の検出を説明するための図である。
【図61】この発明の実施の形態24に係る地図情報処理装置において、図60の新規道路と既存道路との立体交差を示す図である。
【図62】この発明の実施の形態24に係る地図情報処理装置において、図60の新規道路と既存道路との仮交差点を判定する動作を説明するための図である。
【図63】この発明の実施の形態24に係る地図情報処理装置において、新規道路の検出を説明するための図である。
【図64】この発明の実施の形態24に係る地図情報処理装置において、図63の新規道路と既存道路との立体交差を示す図である。
【図65】この発明の実施の形態24に係る地図情報処理装置において、図63の新規道路と既存道路との仮交差点を判定する動作を説明するための図である。
【図66】この発明の実施の形態24に係る地図情報処理装置において行われる仮交差点の状態を設定する処理を示すフローチャートである。
【符号の説明】
【0315】
10 表示地図計算手段、11 経路計算手段、12 表示制御手段、13 音声出力制御手段、14 入力受信手段、15 測位手段、16 HDD、16a 地図情報記憶手段、16b 新規道路情報記憶手段、16c 走行履歴情報記憶手段、16d 未登録高架下情報記憶手段、17 HDDアクセス手段、18 一時記憶メモリ、19 新規道路検出手段、20 交差判定手段、21 道路更新情報生成手段、22 交差点問合せ手段、23 交差点決定手段、24 道路情報更新手段、25 制御手段、26 右左折検出手段、27 映像信号処理手段、28 有料道路走行判定手段、29 バックアップRAM、30 仮交差点道路種別判定手段、31 照度計測手段、32 高架下通過検出手段、33 捕捉衛星検出手段、34 DSRC送受信手段、35 放送信号処理手段、36 未登録高架下通過判定手段、37 メッシュ移動検出手段、40 表示装置、41 音声出力装置、42 入力装置、43 車速センサ、44 角速度センサ、45 GPS受信アンテナ、46 方向指示器、47 撮影装置、48 ETC装置、49 ETCアンテナ、50 運転席側窓センサ、51 照度計、52 準天頂衛星受信アンテナ、53 DSRCアンテナ、54 放送受信アンテナ、55 加速度センサ。
【特許請求の範囲】
【請求項1】
自己の位置を検出する位置検出手段と、
道路情報を含む地図情報を記憶する地図情報記憶手段と、
前記地図情報記憶手段から地図情報を取得する地図情報取得手段と、
前記位置検出手段によって検出された自己の位置に対応する道路が前記地図情報取得手段で取得された地図情報に含まれる道路情報中に存在しない新規道路を検出する新規道路検出手段と、
新規道路情報を記憶する新規道路情報記憶手段と、
前記新規道路検出手段で検出された新規道路と前記地図情報取得手段で取得された地図情報に含まれている道路または前記新規道路検出手段によって過去に検出された道路とが該新規道路の始終点以外で交差する交差地点を判定する交差判定手段と、
前記新規道路検出手段で検出された新規道路を表す新規道路情報を生成するとともに、前記新規道路情報記憶手段に記憶されている前記新規道路情報および前記地図情報記憶手段に記憶されている地図情報に含まれる道路情報を更新するための情報を含む道路更新情報を生成する道路更新情報生成手段と、
前記道路更新情報生成手段で生成された道路更新情報に基づき、前記地図情報記憶手段に記憶されている地図情報に含まれる道路情報および前記新規道路情報記憶手段に記憶されている新規道路情報に含まれる道路情報を更新し、且つ前記新規道路情報記憶手段に新規道路情報を書き込む道路情報更新手段
とを備えた地図情報処理装置。
【請求項2】
道路更新情報生成手段は、交差判定手段によって判定された交差地点を、平面交差しているのか立体交差しているのかが規定されていない仮交差点として道路更新情報を生成する
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項3】
地図情報記憶手段に記憶されている地図情報に含まれる道路情報および新規道路情報記憶手段に記憶されている新規道路情報に含まれる仮交差点が平面交差しているのか立体交差しているのかを決定する交差点決定手段
を備えたことを特徴とする請求項2記載の地図情報処理装置。
【請求項4】
仮交差点が平面交差しているのか立体交差しているのかを問い合わせる交差点問合せ手段を備え、
交差点決定手段は、前記交差点問合せ手段からの問い合わせに対する応答に従って、前記仮交差点を平面交差点または立体交差点に決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項5】
2点間の推奨経路を計算する経路計算手段を備え、
交差点問合せ手段は、前記経路計算手段によって計算された推奨経路が仮交差点を含み、且つ該仮交差点で右左折する経路である場合に、該仮交差点が平面交差しているのか立体交差しているのかを問い合わせる
ことを特徴とする請求項4記載の地図情報処理装置。
【請求項6】
交差点問合せ手段は、当該地図情報処理装置の動作の終了時に仮交差点が平面交差しているのか立体交差しているのかを問い合わせる
ことを特徴とする請求項4記載の地図情報処理装置。
【請求項7】
交差点問合せ手段は、当該地図情報処理装置の起動時に仮交差点が平面交差しているのか立体交差しているのかを問い合わせる
ことを特徴とする請求項4記載の地図情報処理装置。
【請求項8】
自己が右左折したことを検出する右左折検出手段を備え、
交差点決定手段は、右左折検出手段が仮交差点における右左折を検出した時点で、該仮交差点を平面交差点に決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項9】
道路更新情報生成手段は、新規道路についての高さ方向の移動変分を含む新規道路情報を生成し、
位置検出手段は、高さ方向の移動変分を含む自車位置を検出し、
交差点決定手段は、右左折検出手段が仮交差点における右左折を検出した場合に、位置検出手段が検出する高さ方向の移動変分を含む自車位置の移動履歴と、仮交差点で既存道路と交差する新規道路の高度変化情報から平面交差点か立体交差点かを決定する
ことを特徴とする請求項8記載の地図情報処理装置。
【請求項10】
自己が右左折しようとする方向を第三者に伝達するための方向指示器を備え、
右左折検出手段は、前記方向指示器の情報に基づいて自己が右左折したことを検出する ことを特徴とする請求項8または請求項9記載の地図情報処理装置。
【請求項11】
地図情報記憶手段は、高度情報が含まれた道路情報を含む地図情報を記憶し、
位置検出手段は、高度情報を含む3次元の位置を検出し、
道路更新情報生成手段は、仮交差点の道路更新情報として前記位置検出手段によって検出された高度情報を含む道路更新情報を生成し、
交差点決定手段は、新規道路検出手段で検出された新規道路と地図情報記憶手段に記憶されている地図情報に含まれる道路情報によって表される道路との仮交差点における高度情報の差が所定範囲内であるときに、該仮交差点を平面交差点に決定し、所定範囲外のときに、該仮交差点を立体交差点に決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項12】
新規道路情報記憶手段は、高度情報を含む新規道路情報を記憶し、
交差点決定手段は、新規道路検出手段で検出された新規道路と前記新規道路情報記憶手段に記憶されている新規道路情報によって表される道路との仮交差点における高度情報の差が所定範囲内であるときに、該仮交差点を平面交差点に決定し、所定範囲外のときに、該仮交差点を立体交差点に決定する
ことを特徴とする請求項11記載の地図情報処理装置。
【請求項13】
地図情報記憶手段は、高度情報が含まれた道路情報を含む地図情報を記憶し、
位置検出手段は、高度情報を含む3次元の位置を検出し、
道路更新情報生成手段は、高度情報を含む道路更新情報を生成し、
交差判定手段は、新規道路検出手段で検出された新規道路と地図情報取得手段で取得された地図情報に含まれている道路情報によって表される道路または新規道路検出手段によって過去に検出された道路との交差地点を検出しても、該新規道路とそれと交差する道路との該交差地点における高度情報の差が所定範囲外であれば、検出された交差地点としない
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項14】
自己の移動速度を検出する速度検出手段と、
位置検出手段で検出された自己の位置情報と該検出時点において前記速度検出手段で検出された移動速度を含む走行履歴情報を記憶する走行履歴情報記憶手段とを備え、
交差点決定手段は、前記走行履歴情報記憶手段から仮交差点に進入した走行履歴を検出し、該検出された走行履歴によって仮交差点から指定範囲内で一定時間速度ゼロの状態が継続したことが示されている場合に、該仮交差点を平面交差点であると決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項15】
交差点決定手段は、位置検出手段によって検出された自己の位置が、仮交差点において、新規道路情報記憶手段に記憶されている新規道路から、地図情報記憶手段に記憶されている地図情報に含まれる道路情報によって表される道路に移動したことを検出したときに、該仮交差点を平面交差点であると決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項16】
交差点決定手段は、位置検出手段によって検出された自己の位置が、仮交差点において、地図情報記憶手段に記憶されている地図情報に含まれる道路情報によって表される道路から、新規道路情報記憶手段に記憶されている新規道路に移動したことを検出したときに、該仮交差点を平面交差点であると決定する
ことを特徴とする請求項3または請求項15記載の地図情報処理装置。
【請求項17】
交差点決定手段は、位置検出手段によって検出された自己の位置が、仮交差点において、新規道路情報記憶手段に記憶されている新規道路から、新規道路情報記憶手段に記憶されている他の新規道路に移動したことを検出したときに、該仮交差点を平面交差点であると決定する
ことを特徴とする請求項3、請求項15または請求項16記載の地図情報処理装置。
【請求項18】
自己の周囲を撮影する撮影装置と、
前記撮影装置による撮影によって得られた映像信号を処理する映像信号処理手段とを備え、
交差点決定手段は、前記映像信号処理手段で処理することにより得られた仮交差点付近の画像から該仮交差点を平面交差点または立体交差点に決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項19】
自己の周囲を撮影する撮影装置を備え、
交差判定手段は、新規道路検出手段で検出された新規道路と地図情報取得手段で取得された地図情報に含まれている道路情報によって表される道路または新規道路検出手段によって過去に検出された道路との交差地点を検出しても、前記撮影装置で撮影することにより得られた画像によって該交差地点が立体交差していると判断されたときは、検出した交差地点と判定しない
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項20】
自己が有料道路上を走行していることを判断する有料道路走行判定手段を備え、
交差点決定手段は、仮交差点に到達したときに、前記有料道路走行判定手段によって自己が有料道路上を走行していると判断された場合は、該仮交差点を立体交差点であると決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項21】
自己が有料道路上を走行していることを判断する有料道路走行判定手段を備え、
交差判定手段は、新規道路検出手段で検出された新規道路と地図情報取得手段で取得された地図情報に含まれている道路情報によって表される道路または新規道路検出手段によって過去に検出された道路との交差地点を検出しても、前記有料道路走行判定手段によって自己が有料道路上を走行していると判断されたときは、検出した交差地点と判定しない
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項22】
仮交差点において交差する道路の道路種別を判定する仮交差点道路種別判定手段を備え、
交差点決定手段は、前記仮交差点道路種別判定手段によって、新規道路情報記憶手段に記憶されている新規道路に含まれている仮交差点において交差する道路のうちの少なくとも1つの道路の道路種別が高速道路であると判定された場合に、該仮交差点を立体交差点であると決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項23】
仮交差点において交差する道路の道路種別を判定する仮交差点道路種別判定手段を備え、
交差判定手段は、新規道路検出手段で検出された新規道路と地図情報取得手段で取得された地図情報に含まれている道路情報によって表される道路または新規道路検出手段によって過去に検出された道路との交差地点を検出しても、前記仮交差点道路種別判定手段によって、該新規道路と交差している道路が高速道路であると判断されたときは、検出した交差地点と判定しない
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項24】
走行中の道路上を高架で横切る高架構造物を検出する高架下通過検出手段を備え、
交差点決定手段は、仮交差点の走行時に前記高架下通過検出手段によって高架構造物が検出されたときに、該仮交差点を立体交差点であると決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項25】
走行中の道路上を高架で横切る高架構造物を検出する高架下通過検出手段を備え、
交差判定手段は、新規道路検出手段で検出された新規道路と地図情報取得手段で取得された地図情報に含まれている道路情報によって表される道路または新規道路検出手段によって過去に検出された道路との交差地点を検出しても、前記高架下通過検出手段によって高架構造物が検出されたときは、検出した交差地点と判定しない
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項26】
自己に照射される光量を計測する照度計測手段を備え、
高架下通過検出手段は、前記照度計測手段で計測された光量の変化によって高架構造物を検出する
ことを特徴とする請求項24記載の地図情報処理装置。
【請求項27】
自己に照射される光量を計測する照度計測手段を備え、
高架下通過検出手段は、前記照度計測手段で計測された光量の変化によって高架構造物を検出する
ことを特徴とする請求項25記載の地図情報処理装置。
【請求項28】
自己が捕捉できる衛星を検出する捕捉衛星検出手段を備え、
高架下通過検出手段は、前記捕捉衛星検出手段が検出した天頂付近の衛星情報の変化によって高架構造物を検出する
ことを特徴とする請求項24記載の地図情報処理装置。
【請求項29】
自己が捕捉できる衛星を検出する捕捉衛星検出手段を備え、
高架下通過検出手段は、前記捕捉衛星検出手段が検出した天頂付近の衛星情報の変化によって高架構造物を検出する
ことを特徴とする請求項25記載の地図情報処理装置。
【請求項30】
仮交差点が平面交差点であるか立体交差点であるかを示す情報を外部から受信する受信手段を備え、
交差点決定手段は、前記受信手段によって受信された情報に基づき、新規道路情報記憶手段に記憶されている新規道路情報に含まれる仮交差点が平面交差しているか立体交差しているかを判断し、平面交差していると判断したときには該仮交差点を平面交差点に決定し、立体交差していると判断したときに該仮交差点を立体交差点に決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項31】
地図情報記憶手段に記憶されている地図情報に含まれる道路情報によって表される道路または新規道路情報記憶手段に記憶されている新規道路情報によって表される道路を走行中に、走行している道路の上を高架で横切る構造物の有無を検出する高架下通過検出手段と、
前記高架下通過検出手段によって検出された高架構造物が、前記地図情報記憶手段に記憶されている地図情報に含まれる構造物に該当しないとき、または、前記新規道路情報記憶手段に記憶されている新規道路情報によって表される道路に該当しないときに、走行中の道路が未登録高架構造物の下を通過したと判定し、当該地点の位置情報を含む未登録高架下情報を作成する未登録高架下通過判定手段と、
前記未登録高架下通過判定手段によって作成された未登録高架下情報を記憶する未登録高架下情報記憶手段とを備え、
交差点決定手段は、仮交差点において、該仮交差点に該当する未登録高架下情報が前記未登録高架下情報記憶手段に記憶されているときに、該仮交差点を立体交差点に決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項32】
地図情報記憶手段に記憶されている地図情報に含まれる道路情報によって表される道路または新規道路情報記憶手段に記憶されている新規道路情報によって表される道路を走行中に、走行している道路の上を高架で横切る構造物の有無を検出する高架下通過検出手段と、
前記高架下通過検出手段によって検出された高架構造物が、前記地図情報記憶手段に記憶されている地図情報に含まれる構造物に該当しないとき、または、前記新規道路情報記憶手段に記憶されている新規道路情報によって表される道路に該当しないときに、走行中の道路が未登録高架構造物の下を通過したと判定し、当該地点の位置情報を含む未登録高架下情報を作成する未登録高架下通過判定手段と、
前記未登録高架下通過判定手段によって作成された未登録高架下情報を記憶する未登録高架下情報記憶手段とを備え、
交差判定手段は、新規道路検出手段で検出された新規道路と地図情報取得手段で取得された地図情報に含まれている道路情報によって表される道路または新規道路検出手段によって過去に検出された道路との交差地点を検出しても、前記未登録高架下情報記憶手段に未登録高架下情報が記憶されていれば、検出した交差地点と判定しない
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項33】
自己が1つの地図領域から他の地図領域に移動したことを検出する地図領域移動検出手段を備え、
地図情報記憶手段は、複数の地図領域に分割された地図情報を記憶し、
新規道路検出手段は、前記地図領域移動検出手段によって地図領域の移動が検出されたときに、当該地点を地図領域境界地点として走行履歴に記録し、
道路更新情報生成手段は、前記新規道路検出手段で検出された新規道路を前記地図領域境界地点において分断し、地図領域ごとに道路更新情報を生成する
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項34】
地図情報記憶手段に記憶されている地図情報および新規道路情報記憶手段に記憶されている新規道路情報を出力する出力手段を備え、
前記出力手段は、前記地図情報記憶手段に記憶されている地図情報に含まれる道路情報、または、前記新規道路情報記憶手段に記憶されている新規道路情報を出力するときに、前記道路情報または前記新規道路情報に含まれる仮交差点を、平面交差点または立体交差点とは異なる形態で出力する
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項35】
地図情報記憶手段に記憶されている地図情報および新規道路情報記憶手段に記憶されている新規道路情報を出力する出力手段を備え、
前記出力手段は、前記新規道路情報記憶手段に記憶されている新規道路情報を、前記地図情報記憶手段に記憶されている地図情報に含まれる道路情報とは異なる形態で出力する
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項36】
出力手段は、新規道路情報記憶手段に記憶されている新規道路情報を、地図情報記憶手段に記憶されている地図情報に含まれる道路情報とは異なる形態で出力する
ことを特徴とする請求項34記載の地図情報処理装置。
【請求項1】
自己の位置を検出する位置検出手段と、
道路情報を含む地図情報を記憶する地図情報記憶手段と、
前記地図情報記憶手段から地図情報を取得する地図情報取得手段と、
前記位置検出手段によって検出された自己の位置に対応する道路が前記地図情報取得手段で取得された地図情報に含まれる道路情報中に存在しない新規道路を検出する新規道路検出手段と、
新規道路情報を記憶する新規道路情報記憶手段と、
前記新規道路検出手段で検出された新規道路と前記地図情報取得手段で取得された地図情報に含まれている道路または前記新規道路検出手段によって過去に検出された道路とが該新規道路の始終点以外で交差する交差地点を判定する交差判定手段と、
前記新規道路検出手段で検出された新規道路を表す新規道路情報を生成するとともに、前記新規道路情報記憶手段に記憶されている前記新規道路情報および前記地図情報記憶手段に記憶されている地図情報に含まれる道路情報を更新するための情報を含む道路更新情報を生成する道路更新情報生成手段と、
前記道路更新情報生成手段で生成された道路更新情報に基づき、前記地図情報記憶手段に記憶されている地図情報に含まれる道路情報および前記新規道路情報記憶手段に記憶されている新規道路情報に含まれる道路情報を更新し、且つ前記新規道路情報記憶手段に新規道路情報を書き込む道路情報更新手段
とを備えた地図情報処理装置。
【請求項2】
道路更新情報生成手段は、交差判定手段によって判定された交差地点を、平面交差しているのか立体交差しているのかが規定されていない仮交差点として道路更新情報を生成する
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項3】
地図情報記憶手段に記憶されている地図情報に含まれる道路情報および新規道路情報記憶手段に記憶されている新規道路情報に含まれる仮交差点が平面交差しているのか立体交差しているのかを決定する交差点決定手段
を備えたことを特徴とする請求項2記載の地図情報処理装置。
【請求項4】
仮交差点が平面交差しているのか立体交差しているのかを問い合わせる交差点問合せ手段を備え、
交差点決定手段は、前記交差点問合せ手段からの問い合わせに対する応答に従って、前記仮交差点を平面交差点または立体交差点に決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項5】
2点間の推奨経路を計算する経路計算手段を備え、
交差点問合せ手段は、前記経路計算手段によって計算された推奨経路が仮交差点を含み、且つ該仮交差点で右左折する経路である場合に、該仮交差点が平面交差しているのか立体交差しているのかを問い合わせる
ことを特徴とする請求項4記載の地図情報処理装置。
【請求項6】
交差点問合せ手段は、当該地図情報処理装置の動作の終了時に仮交差点が平面交差しているのか立体交差しているのかを問い合わせる
ことを特徴とする請求項4記載の地図情報処理装置。
【請求項7】
交差点問合せ手段は、当該地図情報処理装置の起動時に仮交差点が平面交差しているのか立体交差しているのかを問い合わせる
ことを特徴とする請求項4記載の地図情報処理装置。
【請求項8】
自己が右左折したことを検出する右左折検出手段を備え、
交差点決定手段は、右左折検出手段が仮交差点における右左折を検出した時点で、該仮交差点を平面交差点に決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項9】
道路更新情報生成手段は、新規道路についての高さ方向の移動変分を含む新規道路情報を生成し、
位置検出手段は、高さ方向の移動変分を含む自車位置を検出し、
交差点決定手段は、右左折検出手段が仮交差点における右左折を検出した場合に、位置検出手段が検出する高さ方向の移動変分を含む自車位置の移動履歴と、仮交差点で既存道路と交差する新規道路の高度変化情報から平面交差点か立体交差点かを決定する
ことを特徴とする請求項8記載の地図情報処理装置。
【請求項10】
自己が右左折しようとする方向を第三者に伝達するための方向指示器を備え、
右左折検出手段は、前記方向指示器の情報に基づいて自己が右左折したことを検出する ことを特徴とする請求項8または請求項9記載の地図情報処理装置。
【請求項11】
地図情報記憶手段は、高度情報が含まれた道路情報を含む地図情報を記憶し、
位置検出手段は、高度情報を含む3次元の位置を検出し、
道路更新情報生成手段は、仮交差点の道路更新情報として前記位置検出手段によって検出された高度情報を含む道路更新情報を生成し、
交差点決定手段は、新規道路検出手段で検出された新規道路と地図情報記憶手段に記憶されている地図情報に含まれる道路情報によって表される道路との仮交差点における高度情報の差が所定範囲内であるときに、該仮交差点を平面交差点に決定し、所定範囲外のときに、該仮交差点を立体交差点に決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項12】
新規道路情報記憶手段は、高度情報を含む新規道路情報を記憶し、
交差点決定手段は、新規道路検出手段で検出された新規道路と前記新規道路情報記憶手段に記憶されている新規道路情報によって表される道路との仮交差点における高度情報の差が所定範囲内であるときに、該仮交差点を平面交差点に決定し、所定範囲外のときに、該仮交差点を立体交差点に決定する
ことを特徴とする請求項11記載の地図情報処理装置。
【請求項13】
地図情報記憶手段は、高度情報が含まれた道路情報を含む地図情報を記憶し、
位置検出手段は、高度情報を含む3次元の位置を検出し、
道路更新情報生成手段は、高度情報を含む道路更新情報を生成し、
交差判定手段は、新規道路検出手段で検出された新規道路と地図情報取得手段で取得された地図情報に含まれている道路情報によって表される道路または新規道路検出手段によって過去に検出された道路との交差地点を検出しても、該新規道路とそれと交差する道路との該交差地点における高度情報の差が所定範囲外であれば、検出された交差地点としない
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項14】
自己の移動速度を検出する速度検出手段と、
位置検出手段で検出された自己の位置情報と該検出時点において前記速度検出手段で検出された移動速度を含む走行履歴情報を記憶する走行履歴情報記憶手段とを備え、
交差点決定手段は、前記走行履歴情報記憶手段から仮交差点に進入した走行履歴を検出し、該検出された走行履歴によって仮交差点から指定範囲内で一定時間速度ゼロの状態が継続したことが示されている場合に、該仮交差点を平面交差点であると決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項15】
交差点決定手段は、位置検出手段によって検出された自己の位置が、仮交差点において、新規道路情報記憶手段に記憶されている新規道路から、地図情報記憶手段に記憶されている地図情報に含まれる道路情報によって表される道路に移動したことを検出したときに、該仮交差点を平面交差点であると決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項16】
交差点決定手段は、位置検出手段によって検出された自己の位置が、仮交差点において、地図情報記憶手段に記憶されている地図情報に含まれる道路情報によって表される道路から、新規道路情報記憶手段に記憶されている新規道路に移動したことを検出したときに、該仮交差点を平面交差点であると決定する
ことを特徴とする請求項3または請求項15記載の地図情報処理装置。
【請求項17】
交差点決定手段は、位置検出手段によって検出された自己の位置が、仮交差点において、新規道路情報記憶手段に記憶されている新規道路から、新規道路情報記憶手段に記憶されている他の新規道路に移動したことを検出したときに、該仮交差点を平面交差点であると決定する
ことを特徴とする請求項3、請求項15または請求項16記載の地図情報処理装置。
【請求項18】
自己の周囲を撮影する撮影装置と、
前記撮影装置による撮影によって得られた映像信号を処理する映像信号処理手段とを備え、
交差点決定手段は、前記映像信号処理手段で処理することにより得られた仮交差点付近の画像から該仮交差点を平面交差点または立体交差点に決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項19】
自己の周囲を撮影する撮影装置を備え、
交差判定手段は、新規道路検出手段で検出された新規道路と地図情報取得手段で取得された地図情報に含まれている道路情報によって表される道路または新規道路検出手段によって過去に検出された道路との交差地点を検出しても、前記撮影装置で撮影することにより得られた画像によって該交差地点が立体交差していると判断されたときは、検出した交差地点と判定しない
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項20】
自己が有料道路上を走行していることを判断する有料道路走行判定手段を備え、
交差点決定手段は、仮交差点に到達したときに、前記有料道路走行判定手段によって自己が有料道路上を走行していると判断された場合は、該仮交差点を立体交差点であると決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項21】
自己が有料道路上を走行していることを判断する有料道路走行判定手段を備え、
交差判定手段は、新規道路検出手段で検出された新規道路と地図情報取得手段で取得された地図情報に含まれている道路情報によって表される道路または新規道路検出手段によって過去に検出された道路との交差地点を検出しても、前記有料道路走行判定手段によって自己が有料道路上を走行していると判断されたときは、検出した交差地点と判定しない
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項22】
仮交差点において交差する道路の道路種別を判定する仮交差点道路種別判定手段を備え、
交差点決定手段は、前記仮交差点道路種別判定手段によって、新規道路情報記憶手段に記憶されている新規道路に含まれている仮交差点において交差する道路のうちの少なくとも1つの道路の道路種別が高速道路であると判定された場合に、該仮交差点を立体交差点であると決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項23】
仮交差点において交差する道路の道路種別を判定する仮交差点道路種別判定手段を備え、
交差判定手段は、新規道路検出手段で検出された新規道路と地図情報取得手段で取得された地図情報に含まれている道路情報によって表される道路または新規道路検出手段によって過去に検出された道路との交差地点を検出しても、前記仮交差点道路種別判定手段によって、該新規道路と交差している道路が高速道路であると判断されたときは、検出した交差地点と判定しない
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項24】
走行中の道路上を高架で横切る高架構造物を検出する高架下通過検出手段を備え、
交差点決定手段は、仮交差点の走行時に前記高架下通過検出手段によって高架構造物が検出されたときに、該仮交差点を立体交差点であると決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項25】
走行中の道路上を高架で横切る高架構造物を検出する高架下通過検出手段を備え、
交差判定手段は、新規道路検出手段で検出された新規道路と地図情報取得手段で取得された地図情報に含まれている道路情報によって表される道路または新規道路検出手段によって過去に検出された道路との交差地点を検出しても、前記高架下通過検出手段によって高架構造物が検出されたときは、検出した交差地点と判定しない
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項26】
自己に照射される光量を計測する照度計測手段を備え、
高架下通過検出手段は、前記照度計測手段で計測された光量の変化によって高架構造物を検出する
ことを特徴とする請求項24記載の地図情報処理装置。
【請求項27】
自己に照射される光量を計測する照度計測手段を備え、
高架下通過検出手段は、前記照度計測手段で計測された光量の変化によって高架構造物を検出する
ことを特徴とする請求項25記載の地図情報処理装置。
【請求項28】
自己が捕捉できる衛星を検出する捕捉衛星検出手段を備え、
高架下通過検出手段は、前記捕捉衛星検出手段が検出した天頂付近の衛星情報の変化によって高架構造物を検出する
ことを特徴とする請求項24記載の地図情報処理装置。
【請求項29】
自己が捕捉できる衛星を検出する捕捉衛星検出手段を備え、
高架下通過検出手段は、前記捕捉衛星検出手段が検出した天頂付近の衛星情報の変化によって高架構造物を検出する
ことを特徴とする請求項25記載の地図情報処理装置。
【請求項30】
仮交差点が平面交差点であるか立体交差点であるかを示す情報を外部から受信する受信手段を備え、
交差点決定手段は、前記受信手段によって受信された情報に基づき、新規道路情報記憶手段に記憶されている新規道路情報に含まれる仮交差点が平面交差しているか立体交差しているかを判断し、平面交差していると判断したときには該仮交差点を平面交差点に決定し、立体交差していると判断したときに該仮交差点を立体交差点に決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項31】
地図情報記憶手段に記憶されている地図情報に含まれる道路情報によって表される道路または新規道路情報記憶手段に記憶されている新規道路情報によって表される道路を走行中に、走行している道路の上を高架で横切る構造物の有無を検出する高架下通過検出手段と、
前記高架下通過検出手段によって検出された高架構造物が、前記地図情報記憶手段に記憶されている地図情報に含まれる構造物に該当しないとき、または、前記新規道路情報記憶手段に記憶されている新規道路情報によって表される道路に該当しないときに、走行中の道路が未登録高架構造物の下を通過したと判定し、当該地点の位置情報を含む未登録高架下情報を作成する未登録高架下通過判定手段と、
前記未登録高架下通過判定手段によって作成された未登録高架下情報を記憶する未登録高架下情報記憶手段とを備え、
交差点決定手段は、仮交差点において、該仮交差点に該当する未登録高架下情報が前記未登録高架下情報記憶手段に記憶されているときに、該仮交差点を立体交差点に決定する
ことを特徴とする請求項3記載の地図情報処理装置。
【請求項32】
地図情報記憶手段に記憶されている地図情報に含まれる道路情報によって表される道路または新規道路情報記憶手段に記憶されている新規道路情報によって表される道路を走行中に、走行している道路の上を高架で横切る構造物の有無を検出する高架下通過検出手段と、
前記高架下通過検出手段によって検出された高架構造物が、前記地図情報記憶手段に記憶されている地図情報に含まれる構造物に該当しないとき、または、前記新規道路情報記憶手段に記憶されている新規道路情報によって表される道路に該当しないときに、走行中の道路が未登録高架構造物の下を通過したと判定し、当該地点の位置情報を含む未登録高架下情報を作成する未登録高架下通過判定手段と、
前記未登録高架下通過判定手段によって作成された未登録高架下情報を記憶する未登録高架下情報記憶手段とを備え、
交差判定手段は、新規道路検出手段で検出された新規道路と地図情報取得手段で取得された地図情報に含まれている道路情報によって表される道路または新規道路検出手段によって過去に検出された道路との交差地点を検出しても、前記未登録高架下情報記憶手段に未登録高架下情報が記憶されていれば、検出した交差地点と判定しない
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項33】
自己が1つの地図領域から他の地図領域に移動したことを検出する地図領域移動検出手段を備え、
地図情報記憶手段は、複数の地図領域に分割された地図情報を記憶し、
新規道路検出手段は、前記地図領域移動検出手段によって地図領域の移動が検出されたときに、当該地点を地図領域境界地点として走行履歴に記録し、
道路更新情報生成手段は、前記新規道路検出手段で検出された新規道路を前記地図領域境界地点において分断し、地図領域ごとに道路更新情報を生成する
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項34】
地図情報記憶手段に記憶されている地図情報および新規道路情報記憶手段に記憶されている新規道路情報を出力する出力手段を備え、
前記出力手段は、前記地図情報記憶手段に記憶されている地図情報に含まれる道路情報、または、前記新規道路情報記憶手段に記憶されている新規道路情報を出力するときに、前記道路情報または前記新規道路情報に含まれる仮交差点を、平面交差点または立体交差点とは異なる形態で出力する
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項35】
地図情報記憶手段に記憶されている地図情報および新規道路情報記憶手段に記憶されている新規道路情報を出力する出力手段を備え、
前記出力手段は、前記新規道路情報記憶手段に記憶されている新規道路情報を、前記地図情報記憶手段に記憶されている地図情報に含まれる道路情報とは異なる形態で出力する
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項36】
出力手段は、新規道路情報記憶手段に記憶されている新規道路情報を、地図情報記憶手段に記憶されている地図情報に含まれる道路情報とは異なる形態で出力する
ことを特徴とする請求項34記載の地図情報処理装置。
【図1】


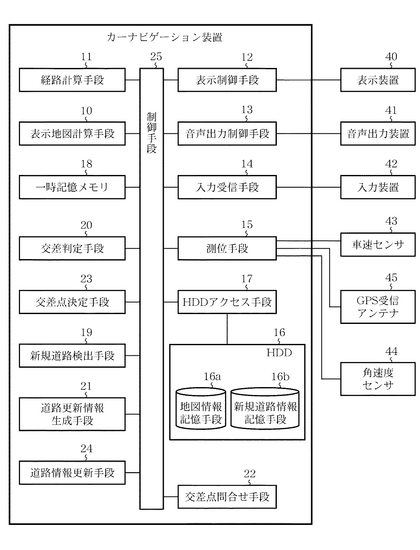
【図2】
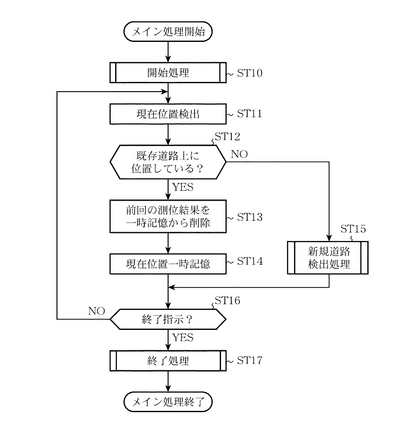
【図3】
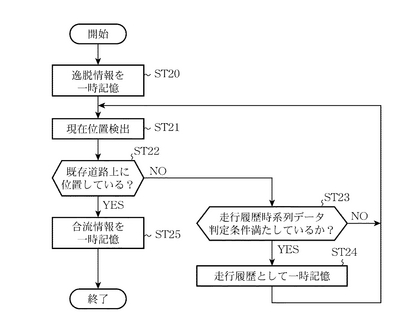
【図4】
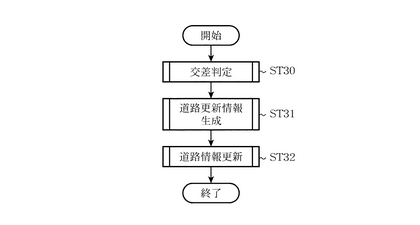
【図5】
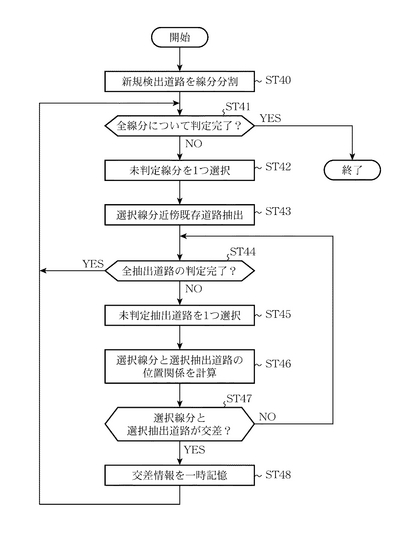
【図6】
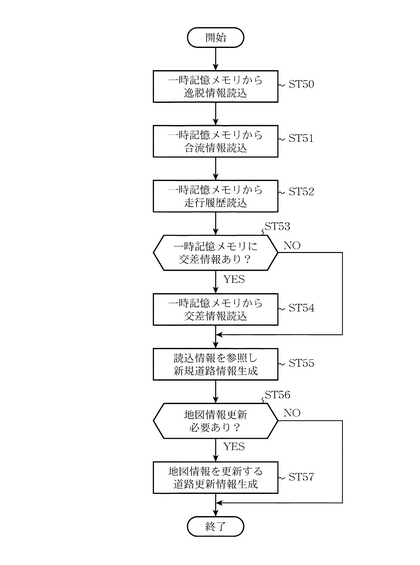
【図7】
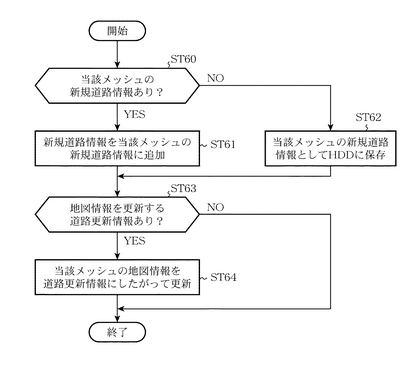
【図8】
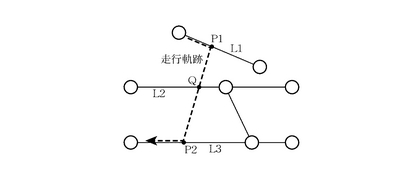
【図9】
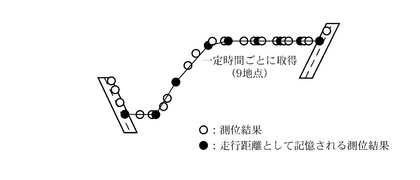
【図10】
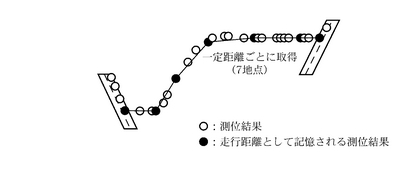
【図11】
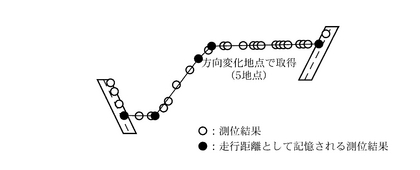
【図12】
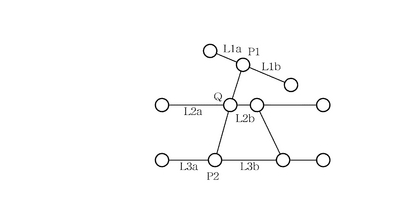
【図13】
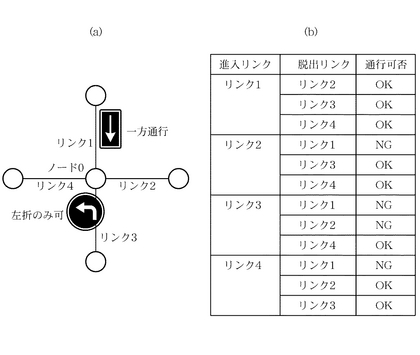
【図14】
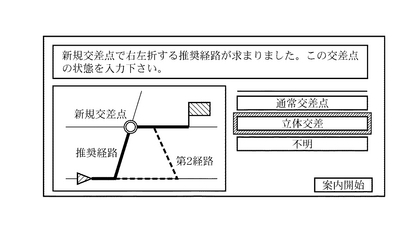
【図15】
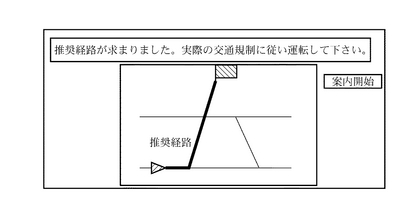
【図16】
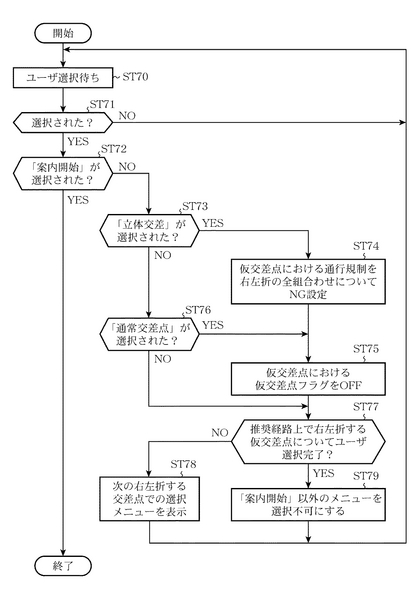
【図17】
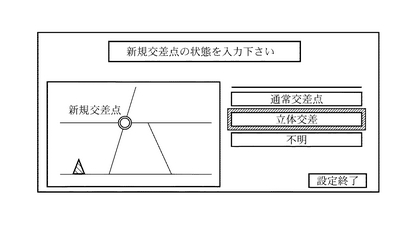
【図18】
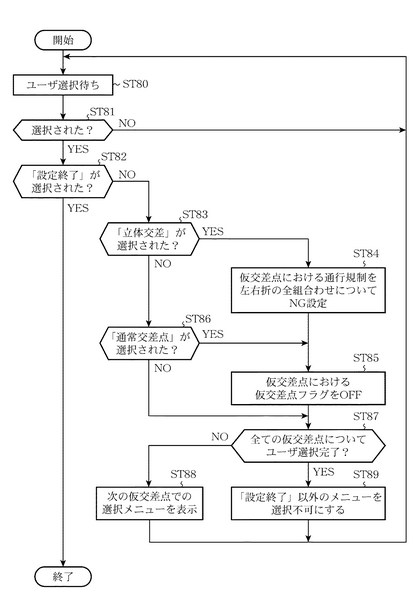
【図19】
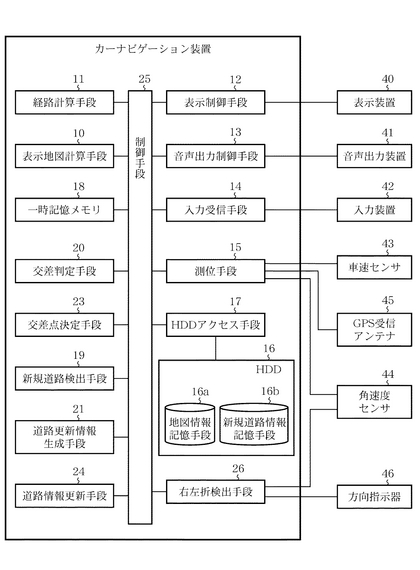
【図20】
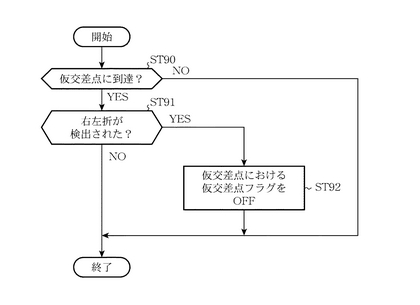
【図21】
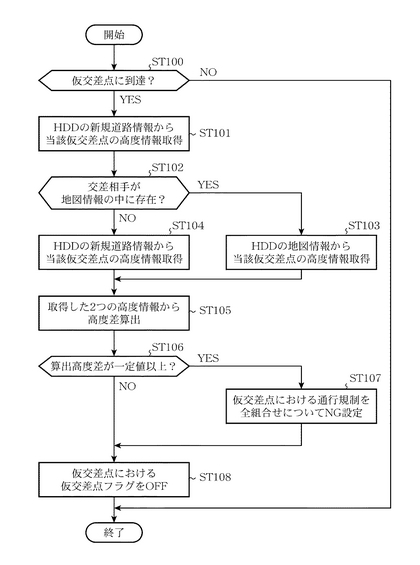
【図22】
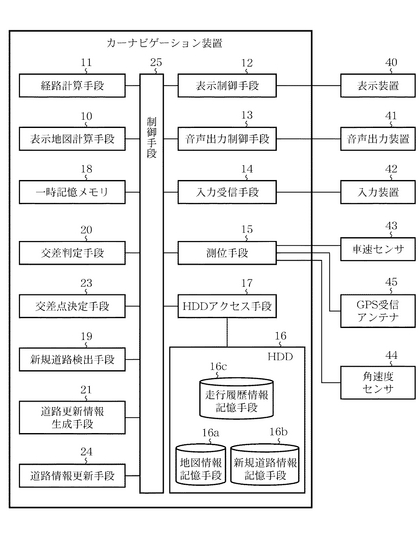
【図23】
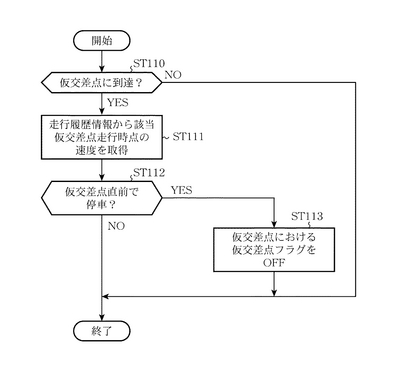
【図24】
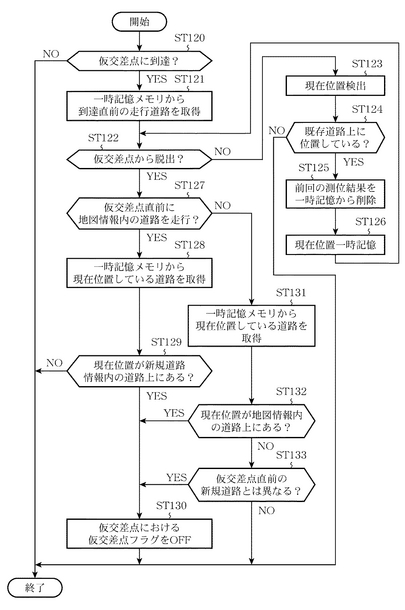
【図25】
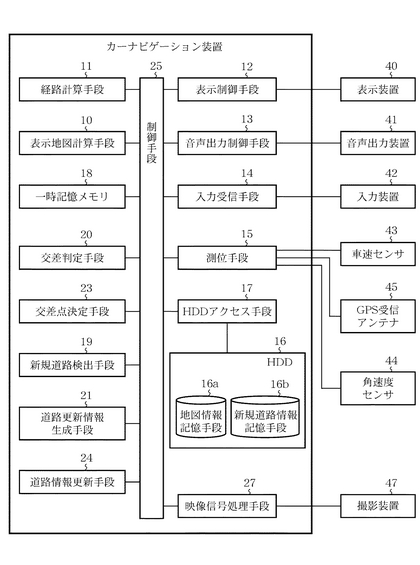
【図26】
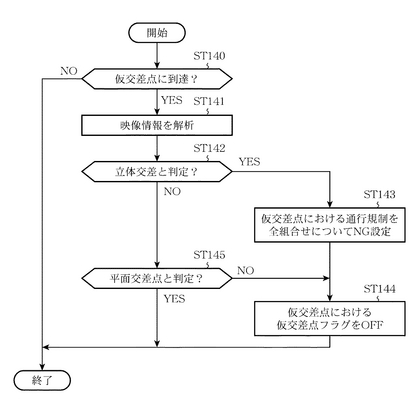
【図27】
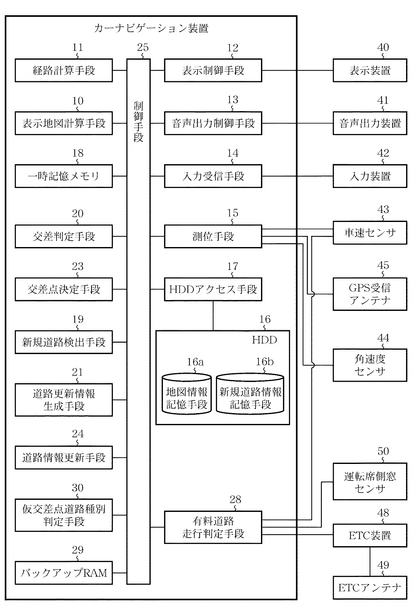
【図28】
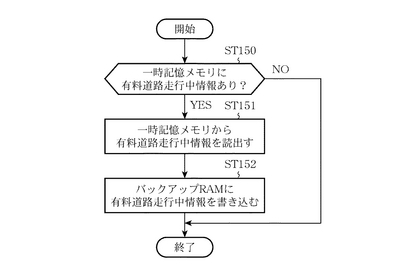
【図29】
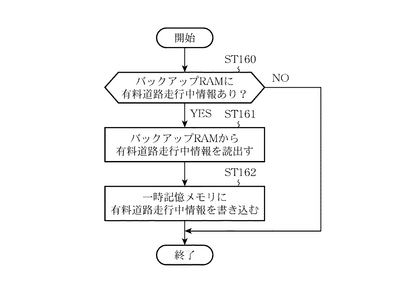
【図30】
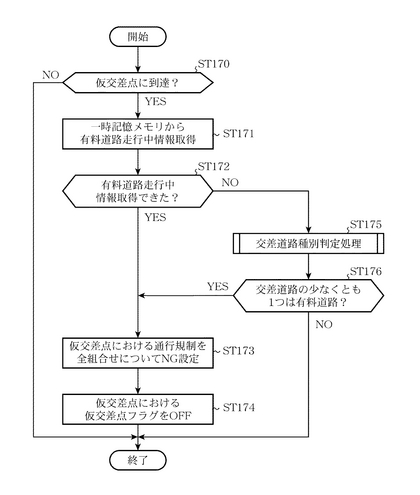
【図31】
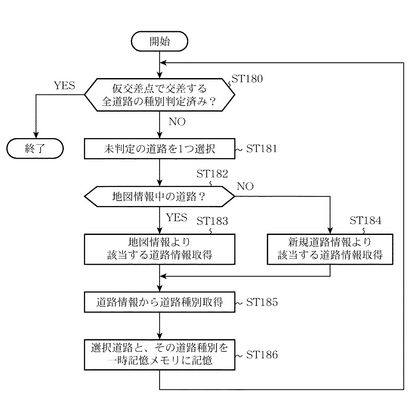
【図32】
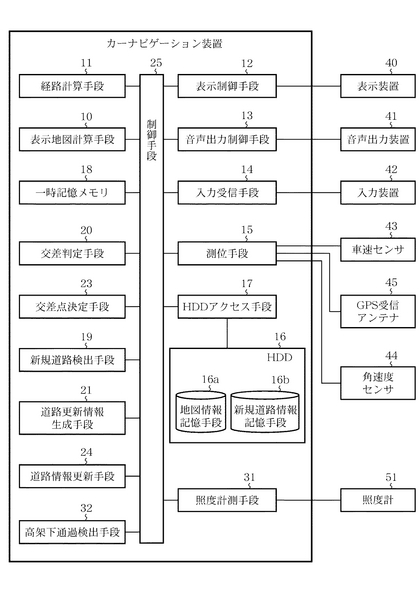
【図33】
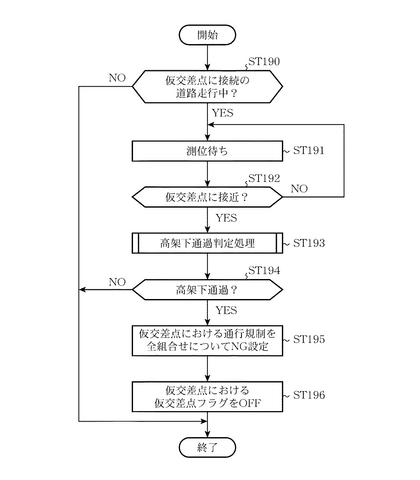
【図34】
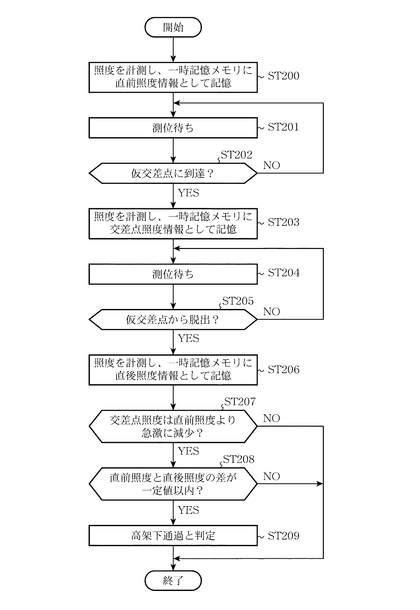
【図35】
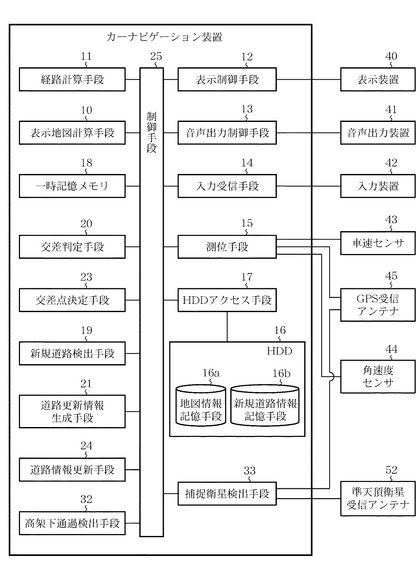
【図36】
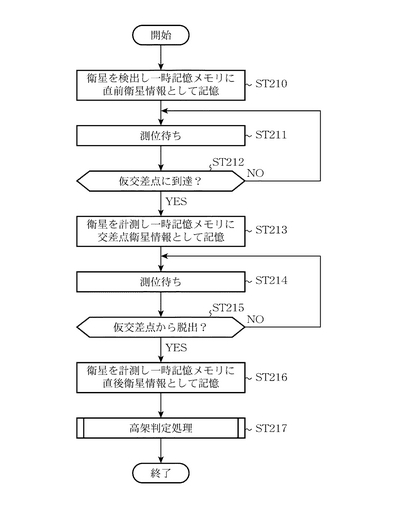
【図37】
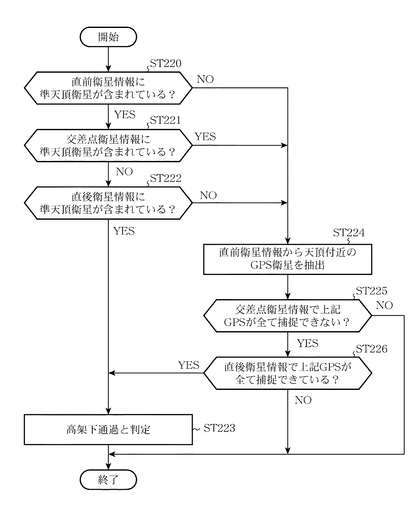
【図38】
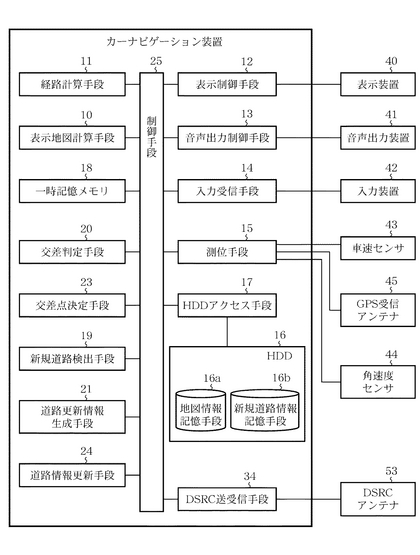
【図39】
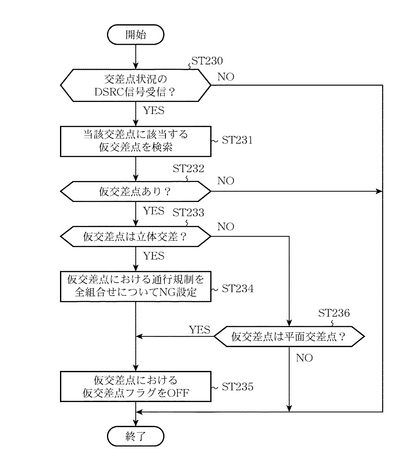
【図40】
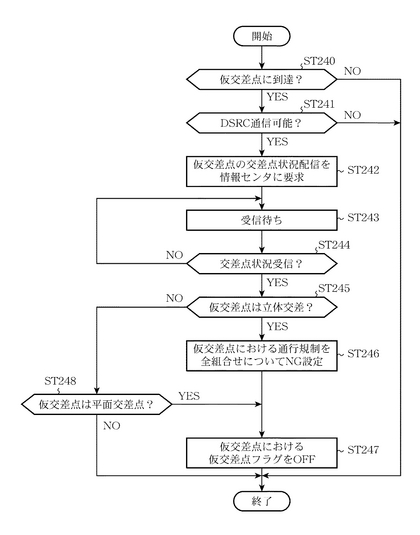
【図41】
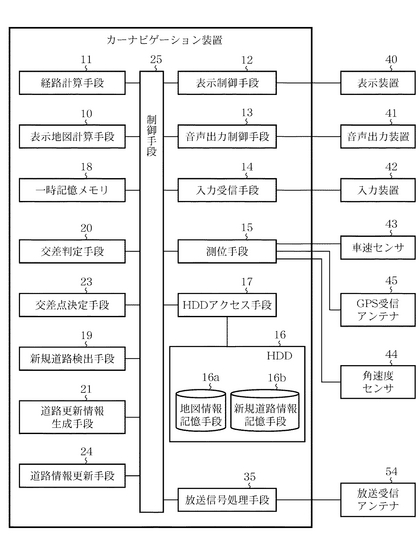
【図42】
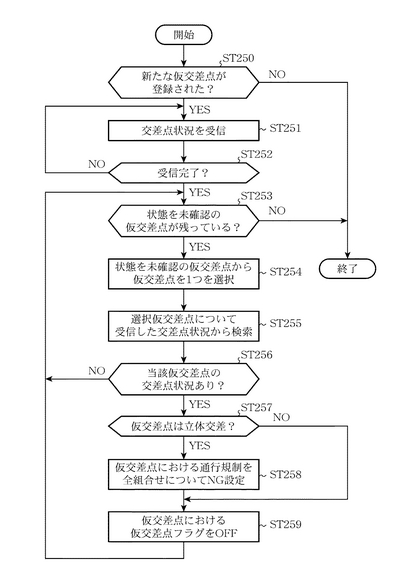
【図43】
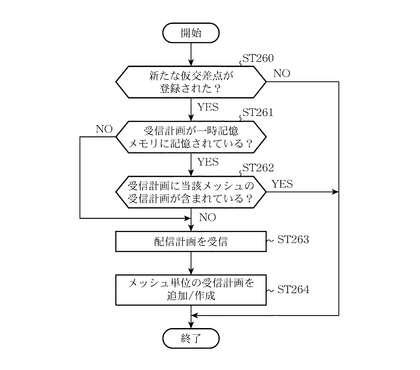
【図44】
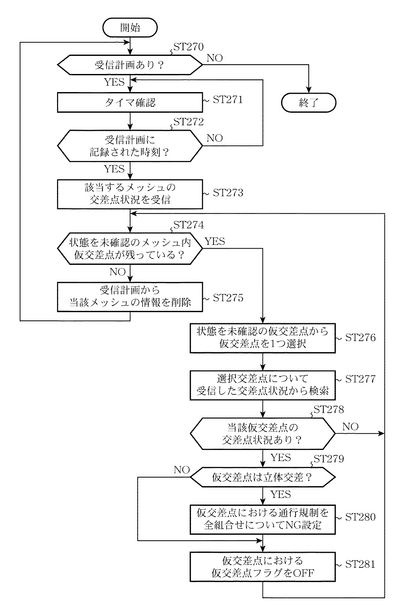
【図45】

【図46】
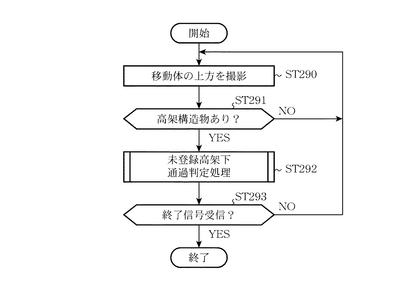
【図47】
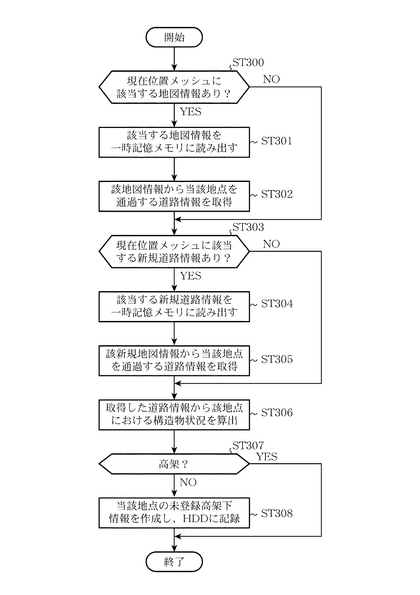
【図48】
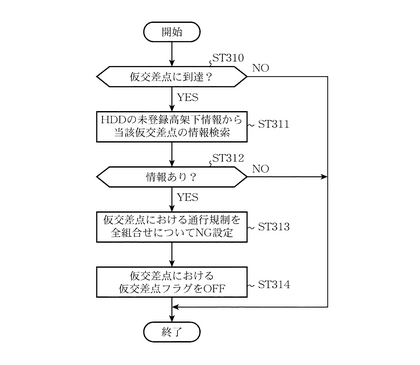
【図49】
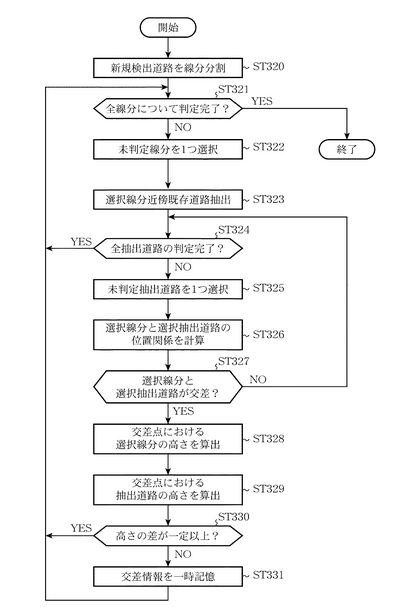
【図50】
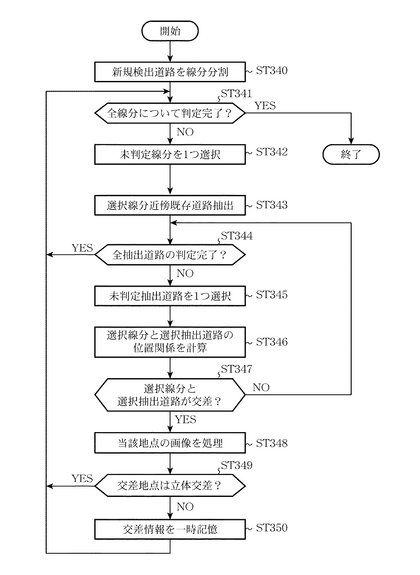
【図51】
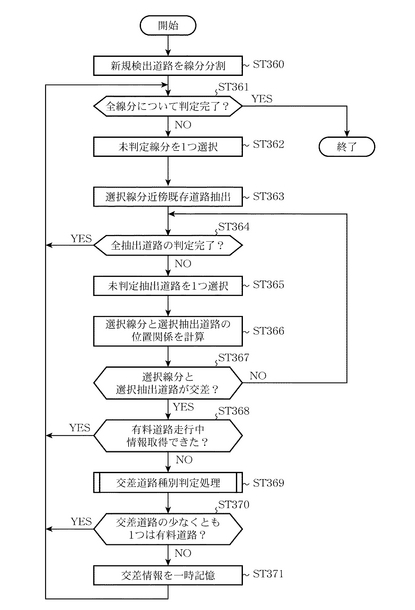
【図52】
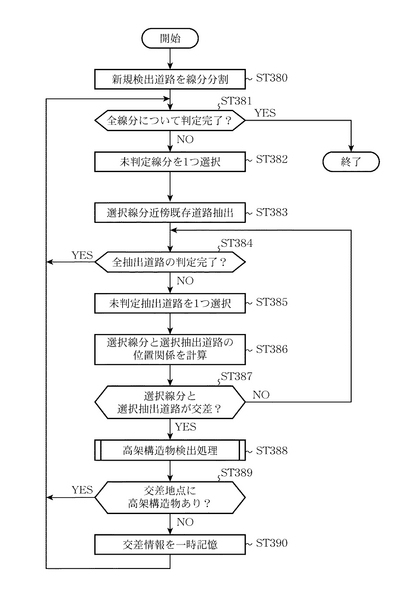
【図53】
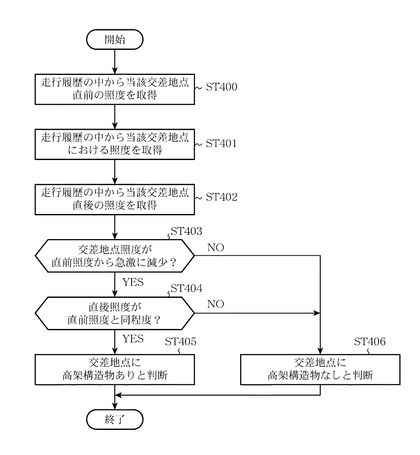
【図54】
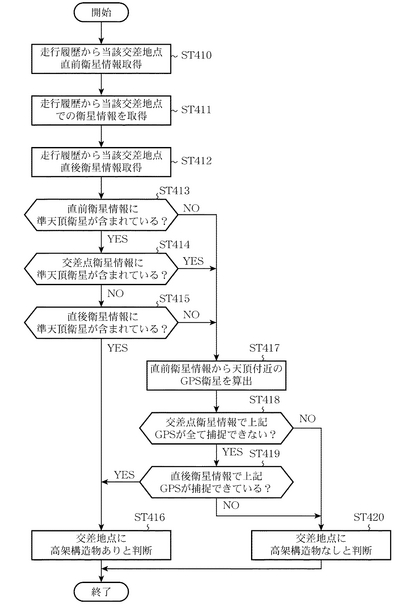
【図55】
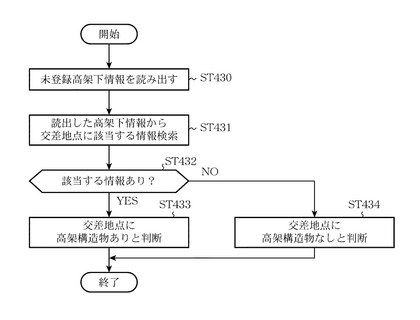
【図56】
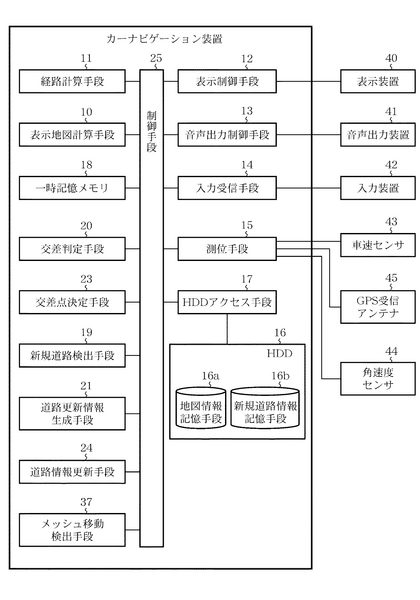
【図57】
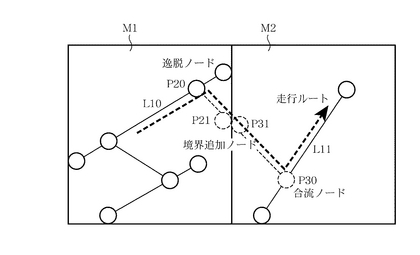
【図58】
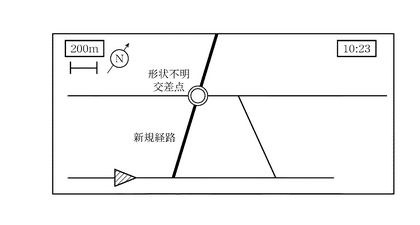
【図59】
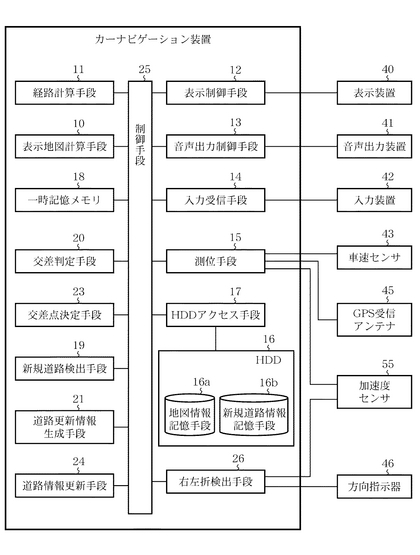
【図60】
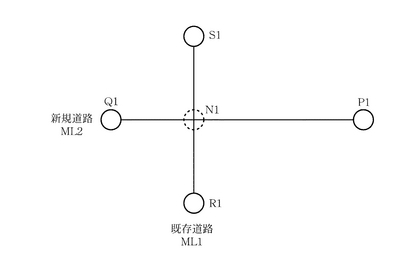
【図61】
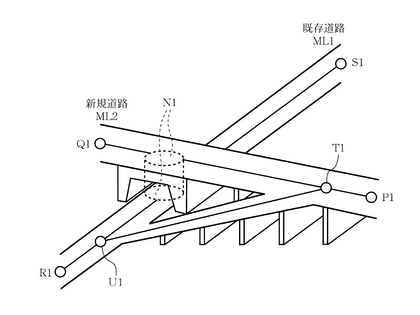
【図62】
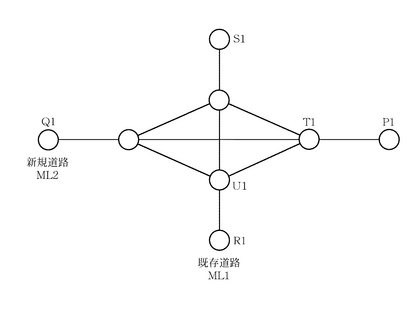
【図63】
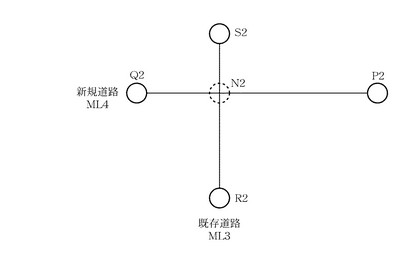
【図64】
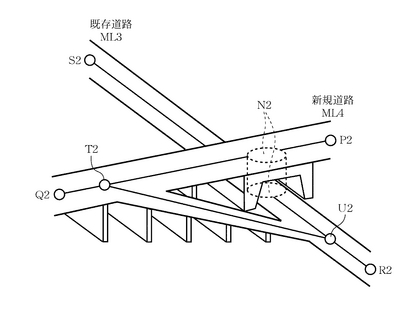
【図65】
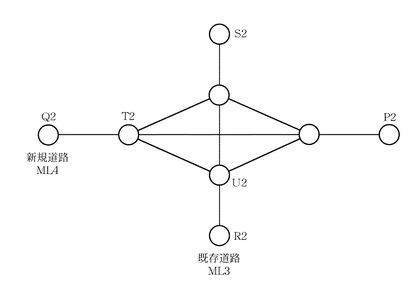
【図66】
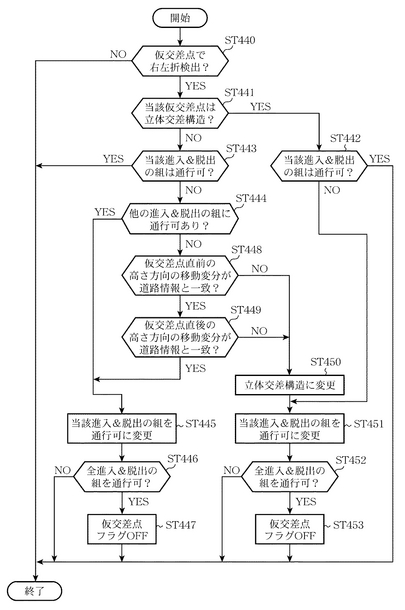
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図49】
【図50】
【図51】
【図52】
【図53】
【図54】
【図55】
【図56】
【図57】
【図58】
【図59】
【図60】
【図61】
【図62】
【図63】
【図64】
【図65】
【図66】
【公開番号】特開2006−53123(P2006−53123A)
【公開日】平成18年2月23日(2006.2.23)
【国際特許分類】
【出願番号】特願2005−14489(P2005−14489)
【出願日】平成17年1月21日(2005.1.21)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成18年2月23日(2006.2.23)
【国際特許分類】
【出願日】平成17年1月21日(2005.1.21)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]