
地図情報処理装置
【課題】未登録道路の正確なデータを得て、未登録道路を地図情報に追加できる地図情報処理装置を提供する。
【解決手段】測位手段141からの現在位置データを走行軌跡データとして格納するメモリ144aと、登録道路の道路データを記憶する地図データ記憶手段142と、道路データと現在位置データとを照合してマップマッチングを行う道路照合手段143と、検出開始指示地点および検出終了指示地点を入力する入力装置130と、検出開始指示地点および検出終了指示地点が入力されており、且つ、道路照合手段によるマップマッチングまたは走行軌跡データと道路データとの比較結果に基づき得られた未登録道路の検出開始地点と検出終了地点との間を未登録道路として検出する未登録道路検出手段144と、検出された未登録道路に対応する道路データを生成し、地図データ記憶手段に格納する道路データ生成手段145を備えている。
【解決手段】測位手段141からの現在位置データを走行軌跡データとして格納するメモリ144aと、登録道路の道路データを記憶する地図データ記憶手段142と、道路データと現在位置データとを照合してマップマッチングを行う道路照合手段143と、検出開始指示地点および検出終了指示地点を入力する入力装置130と、検出開始指示地点および検出終了指示地点が入力されており、且つ、道路照合手段によるマップマッチングまたは走行軌跡データと道路データとの比較結果に基づき得られた未登録道路の検出開始地点と検出終了地点との間を未登録道路として検出する未登録道路検出手段144と、検出された未登録道路に対応する道路データを生成し、地図データ記憶手段に格納する道路データ生成手段145を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、地図情報を処理する地図情報処理装置に関し、特に、地図データベースに登録されていない未登録道路を検出して地図データベースに登録する技術に関する。
【背景技術】
【0002】
未登録道路を地図データベースに登録する技術として、特許文献1は、道路情報に無い道路を通行した場合、その情報を保持し、新たな道路として登録することにより、CD−ROMの更新や改訂を待つこと無くナビゲーションを可能にしたナビゲーション装置を開示している。このナビゲーション装置は、GPS受信装置と、自車位置を表示する表示装置と、地図情報を格納したCD−ROMからデータを読み出すCD−ROMドライブ装置と、道路情報蓄積メモリを有する制御部とを備え、CD−ROMに格納された道路情報の道路上から自車位置が離れたことを検知した場合、または、使用者の指令に応じて、自車の軌跡データを直線とノードに変換し、道路情報メモリに蓄積を開始し、自車位置がCD−ROMに格納された道路情報の道路上に復帰した場合、または、使用者の指定に応じて蓄積を終了した場合、自車の軌跡データを新たな道路として登録する。
【0003】
また、特許文献2は、既存の地図情報に追加、削除、変更等を行うことができるナビゲーションシステムを開示している。このナビゲーションシステムは、地図情報に基づき地図を表示すると共に、目的地までの経路を探索して経路案内を行うナビゲーションシステムであって、道路の起点または終点となる複数の基準地点を設定する基準地点設定手段と、車両の位置を検出する位置検出手段と、車両が複数の基準地点のうちのいずれか1つの第1の基準地点から異なる第2の地点に地図情報に存在しない道路で移動した場合、位置検出手段により検出された位置情報に基づき道路情報を生成する地図情報生成手段と、地図情報生成手段により生成された道路情報を地図情報の一部として記憶する追加地図情報記憶手段とを備えている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平8−271272号公報
【特許文献2】特開2001−74485号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1に示されたナビゲーション装置は、道路情報によって示される道路と自車位置とを照合し、自車位置が道路上に存在するように修正するマップマッチングを実行しながら自車の軌跡データを道路情報メモリに順次蓄積するので、未登録道路を走行した場合は、その未登録道路の近傍の道路に誤マッチングするという事態が発生し、正確な未登録道路の軌跡データを道路情報メモリに蓄積することができない。その結果、未登録道路の正確なデータが得られないという問題がある。
【0006】
また、特許文献2に開示されたナビゲーションシステムは、道路の起点または終点となる複数の基準地点をあらかじめ設定しておき、車両が複数の基準地点のうちのいずれか1つの基準地点から他の基準地点に地図情報に存在しない道路上を移動した場合に、検出された位置情報に基づき道路情報を生成して地図情報の一部として記憶する。したがって、あらかじめ設定された基準地点が、未登録道路の始点または終点と正確に一致しない場合が発生し、未登録道路の正確なデータが得られないという問題がある。
【0007】
この発明は、上述した問題を解消するためになされたものであり、その課題は、未登録道路の正確なデータを得て、未登録道路を地図情報に追加できる地図情報処理装置を提供することにある。
【課題を解決するための手段】
【0008】
この発明に係る地図情報処理装置は、上記課題を解決するために、現在位置を測位する測位手段と、測位手段による測位によって順次に得られる現在位置を走行軌跡データとして格納するメモリと、登録道路の道路データを含む地図データを記憶する地図データ記憶手段と、地図データ記憶手段から読み出した道路データによって示される登録道路と測位手段によって測位された現在位置とを照合してマップマッチングを行う道路照合手段と、未登録道路の検出を開始すべき地点である検出開始指示地点および検出を終了すべき地点である検出終了指示地点を入力する入力装置と、入力装置から未登録道路の検出開始指示地点および検出終了指示地点が入力されており、且つ、道路照合手段によるマップマッチングまたはメモリから読み出した走行軌跡データと地図データ記憶手段から読み出した道路データとの比較結果に基づき得られた未登録道路の検出開始地点と検出終了地点との間を未登録道路として検出する未登録道路検出手段と、未登録道路検出手段で検出された未登録道路に対応する道路データを生成し、地図データ記憶手段に格納する道路データ生成手段とを備えている。
【発明の効果】
【0009】
この発明によれば、入力装置から未登録道路の検出開始指示地点および検出終了指示地点が入力されている場合に、道路照合手段によるマップマッチングまたはメモリから読み出した走行軌跡データと前記地図データ記憶手段から読み出した道路データとの比較結果に基づき得られた未登録道路の検出開始地点と検出終了地点との間を未登録道路として検出するように構成したので、誤マッチングを避けることができ、未登録道路の正確なデータが得られる。その結果、正確な未登録道路を登録道路として地図情報に追加できる。
【図面の簡単な説明】
【0010】
【図1】この発明の実施の形態1に係る地図情報処理装置が適用されたナビゲーション装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係る地図情報処理装置で行われる定時処理を示すフローチャートである。
【図3】図2に示す定時処理のステップST16で行われる未登録道路検出開始地点設定処理の詳細を示すフローチャートである。
【図4】この発明の実施の形態1に係る地図情報処理装置の動作を説明するための説明図である。
【図5】この発明の実施の形態1に係る地図情報処理装置において未登録道路の検出開始指示が早い時点で行われる場合の表示例を示す図である。
【図6】この発明の実施の形態1に係る地図情報処理装置において未登録道路の検出開始指示が遅い時点で行われる場合の表示例を示す図である。
【図7】図2に示す定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を示すフローチャートである。
【図8】この発明の実施の形態1に係る地図情報処理装置において未登録道路の検出終了指示が早い時点で行われる場合の表示例を示す図である。
【図9】この発明の実施の形態1に係る地図情報処理装置において未登録道路の検出終了指示が遅い時点で行われる場合の表示例を示す図である。
【図10】この発明の実施の形態1に係る地図情報処理装置において補正を弱めてマップマッチングを行う場合の動作を説明するための図である。
【図11】この発明の実施の形態2に係る地図表示装置の定時処理のステップST16で行われる未登録道路検出開始地点設定処理の詳細を示すフローチャートである。
【図12】この発明の実施の形態2に係る地図情報処理装置の動作を説明するための説明図である。
【図13】この発明の実施の形態2に係る地図情報処理装置において未登録道路の検出が開始される場合の表示例を示す図である。
【図14】この発明の実施の形態3に係る地図表示装置の定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を示すフローチャートである。
【図15】この発明の実施の形態3に係る地図情報処理装置の動作を説明するための説明図である。
【図16】この発明の実施の形態3に係る地図情報処理装置において未登録道路の検出が終了する場合の表示例を示す図である。
【図17】この発明の実施の形態4に係る地図表示装置の定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を示すフローチャートである。
【図18】この発明の実施の形態5に係る地図情報処理装置において行われる定時処理のステップST16で行われる未登録道路検出開始地点設定処理の詳細を示すフローチャートである。
【図19】この発明の実施の形態6に係る地図情報処理装置において行われる定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を示すフローチャートである。
【発明を実施するための形態】
【0011】
以下、この発明をより詳細に説明するために、この発明を実施するための最良の形態について、添付の図面にしたがって説明する。
実施の形態1.
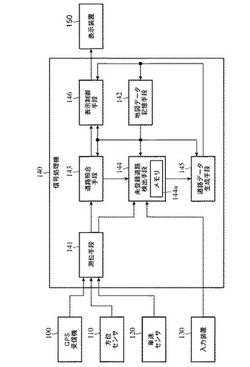
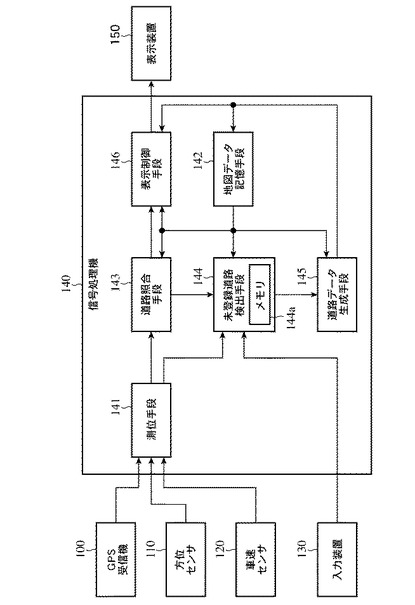
図1は、この発明の実施の形態1に係る地図情報処理装置が適用されたナビゲーション装置の構成を示すブロック図である。このナビゲーション装置は、GPS(Global Positioning System)受信機100、方位センサ110、車速センサ120、入力装置130、信号処理機140および表示装置150から構成されている。
【0012】
GPS受信機100は、人工衛星(GPS衛星)からの電波を受信することにより得られた信号から自車の現在位置の緯度、経度および高度などといった位置情報を算出する。このGPS受信機100で算出された位置情報は、信号処理機140に送られる。方位センサ110は、例えばジャイロセンサから構成されており、車両の進行方位を検出する。この方位センサ110で検出された進行方位を表す方位情報は、自律航法データとして信号処理機140に送られる。車速センサ120は、例えば速度計およびブレーキ検出装置などから構成されており、車両の走行速度およびブレーキがオンであるか否かを表すブレーキ状態を検出する。この車速センサ120で検出された走行速度およびブレーキ状態を含む車速情報は、自律航法データとして信号処理機140に送られる。
【0013】
入力装置130は、例えばリモートコントローラ、タッチパネル、音声認識機能付き音声入力装置などから構成されており、ユーザが種々のデータを入力するために使用される。例えば、入力装置130は、道路データとして登録されていない未登録道路を検出する際に、未登録道路の検出開始および検出終了の指示をユーザが入力するために使用される。この入力装置130から入力されたデータは、信号処理機140に送られる。
【0014】
信号処理機140は、例えばコンピュータから構成されており、位置検出、経路探索、経路誘導等といったナビゲーションに必要な機能を実現するための処理の他に、この発明の特徴である未登録道路を検出して登録する処理を行う。この信号処理機140の詳細は後述する。表示装置150は、例えば液晶ディスプレイ装置から構成されており、この発明の表示手段の一部に対応する。この表示装置150は、信号処理機140から送られてくる表示データにしたがって、自車の現在位置、経路等が示された地図、各種メッセージなどを表示する。
【0015】
次に、信号処理機140の詳細を説明する。信号処理機140は、測位手段141、地図データ記憶手段142、道路照合手段143、未登録道路検出手段144、道路データ生成手段145および表示制御手段146から構成されている。これらの構成要素のうち、地図データ記憶手段142以外は、図示しないメモリに記憶されている制御プログラムによって実現されている。
【0016】
測位手段141は、GPS受信機100から送られてくる位置情報と、方位センサ110および車速センサ120から送られてくる自律航法データに基づいて自車の現在位置を算出する。この測位手段141で算出された自車の現在位置を表す現在位置データは、道路照合手段143および未登録道路検出手段144に送られる。
【0017】
地図データ記憶手段142は、例えばハードディスク装置とその読取装置および書込装置とから構成されており、登録道路の道路データを含む地図データを記憶する。この地図データ記憶手段143に記憶されている地図データは、道路照合手段143、未登録道路検出手段144、道路データ生成手段145および表示制御手段146によって読み出される。また、この地図データ記憶手段142には、道路データ生成手段145で生成された道路データが格納される。
【0018】
道路照合手段143は、測位手段141から送られてくる現在位置データによって示される自車の現在位置と地図データ記憶手段142から読み出した道路データとを照合するマップマッチングを行い、このマップマッチングの結果を未登録道路検出手段144および表示制御手段146に送る。
【0019】
未登録道路検出手段144は、メモリ144aを備えている。この未登録道路検出手段144は、測位手段141から送られてくる現在位置データを自車の走行軌跡データとしてメモリ144aに保存する。また、未登録道路検出手段144は、道路照合手段143から送られてくるマップマッチングの結果および入力装置130から入力された指示に基づいて、地図データ記憶手段142に道路データとして登録されていない未登録道路区間(未登録道路の検出開始地点および検出終了地点)を検出し、この検出した未登録道路区間を道路データ生成手段145に送る。
【0020】
道路データ生成手段145は、未登録道路検出手段144から送られてくる未登録道路区間、つまり未登録道路の検出開始地点および検出終了地点から未登録道路の道路データを生成する。この道路データ生成手段145において生成された道路データは、地図データ記憶手段142に送られて該地図データ記憶手段142に格納されるとともに、表示制御手段146に送られることにより表示装置150に未登録道路として表示される。
【0021】
表示制御手段146は、この発明の表示手段の他の一部に対応し、地図データ記憶手段141から読み出した道路データに基づく道路、道路照合手段143から送られてくるマップマッチングの結果に応じて生成したメッセージおよび道路データ生成手段145から送られてくる地図データによって表される未登録道路を表示するための表示データを生成し、表示装置150に送る。
【0022】
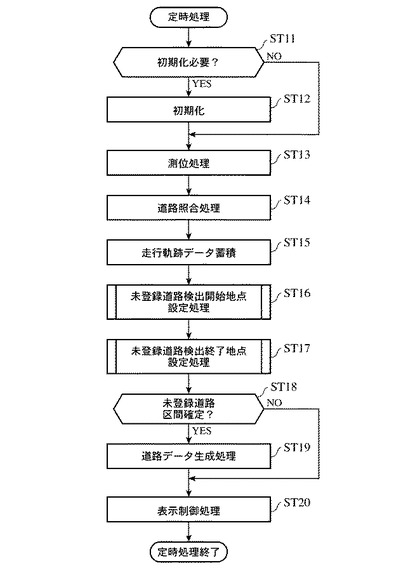
次に、上記のように構成される、この発明の実施の形態1に係る地図情報処理装置の動作を説明する。まず、実施の形態1に係る地図情報処理装置の定常時に行われる定時処理を、図2に示すフローチャートを参照しながら説明する。この定時処理は、所定時間間隔で繰り返し実行される。
【0023】
定時処理では、まず、初期化が必要であるかどうかが調べられる(ステップST11)。初期化は、例えば、電源投入直後などに必要とされる。このステップST11において、初期化が必要であることが判断されると、初期化が行われる(ステップST12)。一方、ステップST11において、初期化が必要でないことが判断されると、ステップST12の処理はスキップされる。
【0024】
次いで、測位処理が実行される(ステップST13)。すなわち、測位手段141は、GPS受信機100から送られてくる位置情報と、方位センサ110および車速センサ120から送られてくる自律航法データとに基づいて自車の現在位置を算出し、現在位置データとして道路照合手段143および未登録道路検出手段144に送る。次いで、道路照合処理が実行される(ステップST14)。すなわち、道路照合手段143は、測位手段141から送られてきた現在位置データと地図データ記憶手段142から読み出した道路データとを照合してマップマッチングを行い、このマップマッチングの結果、つまりマッチングがとれたか否かを表すデータを未登録道路検出手段144および表示制御手段146に送る。
【0025】
次いで、走行軌跡データの蓄積が行われる(ステップST15)。すなわち、未登録道路検出手段144は、測位手段141から送られてくる現在位置データを自車の走行軌跡データとしてメモリ144aに保存する。次いで、未登録道路検出開始地点設定処理が実行される(ステップST16)。すなわち、未登録道路検出手段144は、未登録道路の検出開始地点を検出し、この検出結果を道路データ生成手段145に送る。この未登録道路検出開始地点設定処理の詳細は後述する。
【0026】
次いで、未登録道路検出終了地点設定処理が実行される(ステップST17)。すなわち、未登録道路検出手段144は、未登録道路の検出終了地点を検出し、この検出結果を道路データ生成手段145に送る。この未登録道路検出終了地点設定処理の詳細は後述する。次いで、未登録道路区間が確定したかどうかが調べられる(ステップST18)。すなわち、未登録道路の検出開始地点および検出終了地点が両方とも得られたかどうかが調べられる。このステップST18において、未登録道路区間が確定したことが判断されると、道路データ生成処理が実行される(ステップST19)。すなわち、道路データ生成手段145は、未登録道路検出手段144から送られてきた未登録道路の検出開始地点および検出終了地点から未登録道路の道路データを生成し、地図データ記憶手段142に送って該地図データ記憶手段142に記憶させるとともに、表示制御手段146に送る。ステップST18において、未登録道路区間が確定していないことが判断されると、ステップST19の処理はスキップされる。
【0027】
次いで、表示制御処理が実行される(ステップST20)。すなわち、表示制御手段146は、未登録道路の道路データの生成に成功すれば、すなわち、道路データ生成手段145から道路データが送られてくれば、その旨を表すテロップを表示させるための表示データを生成して表示装置150に送るとともに、道路データ生成手段145から受け取った道路データに基づく未登録道路を表示するための表示データを生成して表示装置150に送る。これにより、ユーザは、表示装置150を見ることにより未登録道路が登録されたこと、および、登録された未登録道路を知ることができる。なお、未登録道路が登録された旨は、テロップの表示に加えて、例えば音声でユーザに知らせるように構成することもできる。以上により、定時処理は終了する。
【0028】
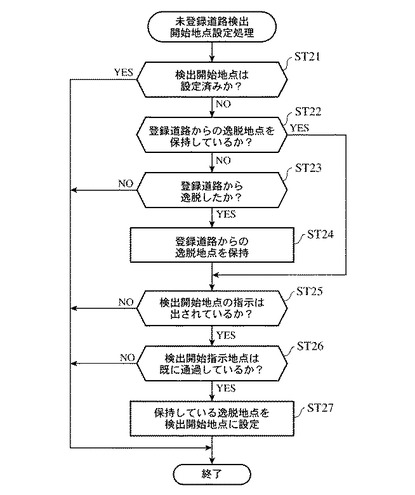
次に、定時処理のステップST16で行われる未登録道路検出開始地点設定処理の詳細を、図3に示すフローチャートを参照しながら説明する。この未登録道路検出開始地点設定処理は、未登録道路検出手段144において行われる。
【0029】
未登録道路検出開始地点設定処理では、まず、検出開始地点は設定済みであるかどうかが調べられる(ステップST21)。このステップST21において、検出開始地点が設定済みであることが判断されると、未登録道路検出開始地点設定処理は終了する。一方、ステップST21において、検出開始地点が設定済みでないことが判断されると、次いで、登録道路からの逸脱地点が保持されているかどうかが調べられる(ステップST22)。すなわち、未登録道路検出手段144は、逸脱地点を示すデータがメモリ144aに格納されているかどうかを調べる。このステップST22において、登録道路からの逸脱地点が保持されていることが判断されると、シーケンスはステップST25に進む。
【0030】
一方、ステップST22において、登録道路からの逸脱地点が保持されていないことが判断されると、次いで、登録道路から逸脱したかどうかが調べられる(ステップST23)。すなわち、未登録道路検出手段144は、道路照合手段143から送られてくるマップマッチングの結果がマッチングしていないことを示しているかどうか、または、メモリ144aから読み出した走行軌跡データによって示される道路が、地図データ記憶手段142から読み出した道路データによって示される登録道路から逸脱しているかどうかを調べる。このステップST23において、登録道路から逸脱していないことが判断されると、未登録道路検出開始地点設定処理は終了する。一方、ステップST23において、登録道路から逸脱したことが判断されると、登録道路からの逸脱地点が保持される(ステップST24)。すなわち、未登録道路検出手段144は、逸脱地点を示すデータをメモリ144aに格納する。その後、シーケンスはステップST25に進む。
【0031】
ステップST25においては、検出開始の指示が出されているかどうかが調べられる。すなわち、未登録道路検出手段144は、走行前または走行中に、入力装置130から検出開始地点を設定する指示が送られてきているかどうかを調べる。このステップST25において、検出開始の指示が出されていないことが判断されると、未登録道路検出開始地点設定処理は終了する。
【0032】
一方、ステップST25において、検出開始の指示が出されていることが判断されると、次いで、検出開始地点として指示された地点(検出開始指示地点)を既に通過しているかどうかが調べられる(ステップST26)。具体的には、未登録道路検出手段144は、測位手段141から送られてくる現在位置データと入力装置130から入力された検出開始指示地点とを比較することにより、現在位置が検出開始地点を既に通過しているかどうかを調べる。
【0033】
このステップST26において、検出開始指示地点を通過していることが判断されると、メモリ144aに保存されている逸脱地点が検出開始地点に設定される(ステップST27)。その後、未登録道路検出開始地点設定処理は終了する。一方、ステップST26において、検出開始指示地点が逸脱地点を過ぎていないことが判断されると、逸脱地点が検出開始地点に設定されずに、未登録道路検出開始地点設定処理は終了する。
【0034】
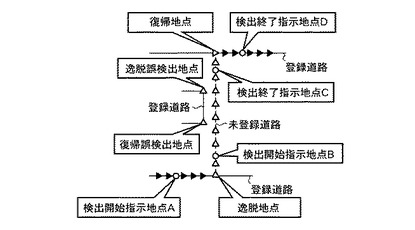
ここで、図4に示すように、検出開始指示地点としては、走行前または走行中に入力装置130を操作することにより、逸脱地点の手前の検出開始指示地点Aが指示される場合と、逸脱地点の先の検出開始指示地点Bが指示される場合がある。なお、図4において、三角印は自車マークを表し、黒塗りの三角印は自車が登録道路上に存在し、白抜きの三角印は、自車が未登録道路、逸脱地点または復帰地点に存在することを表している。以下の各図においても同じである。
【0035】
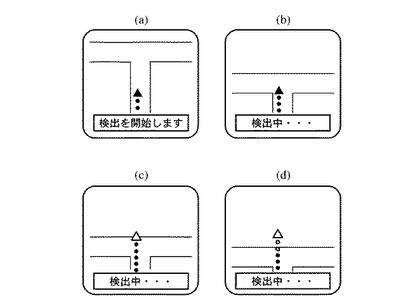
検出開始指示地点Aが指示された場合は、指示された直後は、図5(a)に示すように、表示装置150には、「検出を開始します」というメッセージとともに自車位置および道路が表示され、その後、車両の走行にしたがって、図5(b)〜図5(d)に示すように、「検出中・・・」というメッセージとともに車両の位置が順次更新されならが表示される。図5(b)は登録道路から逸脱する前における表示を示し、図5(c)は逸脱地点における表示を示し、図5(d)は登録道路を逸脱して未登録道路を走行中の表示を示す。
【0036】
検出開始指示地点Aが指示された場合は、図3のフローチャートに示す処理により、検出開始指示地点Aを通過した後に登録道路からの逸脱地点が保持された時点で、その逸脱地点が検出開始地点として設定されることになる。すなわち、ユーザの操作により指定された検出開始地点が検出開始指示地点Aのように、実際の逸脱地点へ到達する前の地点であっても、登録道路から逸脱するまで未登録道路検出の検出開始地点を設定せず、実際の逸脱地点に到達してから未登録道路の検出開始地点を設定する。
【0037】
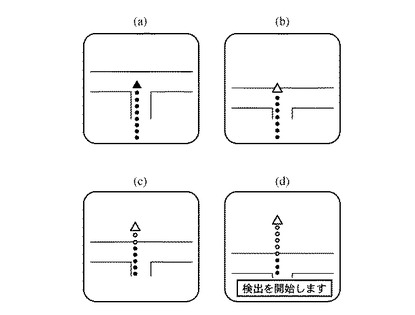
一方、検出開始指示地点Bが指示される場合は、図6(a)〜図6(c)に示すように、表示装置150には、車両の走行にしたがって自車位置が順次更新されならが表示され、その後、検出開始指示地点Bが指示されると「検出を開始します」というメッセージとともに道路が表示される。図6(a)は登録道路から逸脱する前における表示を示し、図6(b)は逸脱地点における表示を示し、図6(c)は登録道路を逸脱して未登録道路を走行中の表示を示し、図6(d)は検出開始指示地点Bが指示された時の表示を示す。
【0038】
検出開始指示地点Bが指示された場合は、図3のフローチャートに示す処理により、検出開始指示地点Bを通過した時点で、メモリ144aに格納されている逸脱地点が検出開始地点として設定されることになる。すなわち、ユーザ操作により指定された検出開始地点が検出開始指示地点Bのように、実際の逸脱地点を通過した地点であっても、登録道路から逸脱を開始した逸脱地点を保持しているので、実際の逸脱地点を未登録道路検出の検出開始地点に設定することが可能となる。
【0039】
なお、ユーザにより走行前または走行中に入力されるのは検出開始地点としたが、検出開始道路を入力するように構成することもできる。
【0040】
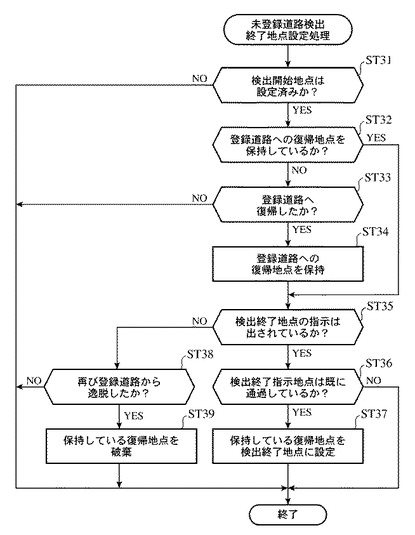
次に、定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を、図7に示すフローチャートを参照しながら説明する。この未登録道路検出終了地点設定処理は、未登録道路検出手段144において行われる。
【0041】
未登録道路検出終了地点設定処理では、まず、検出開始地点は設定済みであるかどうかが調べられる(ステップST31)。このステップST31において、検出開始地点が設定済みでないことが判断されると、未登録道路検出終了地点設定処理は終了する。一方、ステップST31において、検出開始地点が設定済みであることが判断されると、次いで、登録道路への復帰地点が保持されているかどうかが調べられる(ステップST32)。すなわち、未登録道路検出手段144は、復帰地点を示すデータがメモリ144aに格納されているかどうかを調べる。このステップST32において、登録道路への復帰地点が保持されていることが判断されると、シーケンスはステップST35に進む。
【0042】
一方、ステップST32において、登録道路への復帰地点が保持されていないことが判断されると、次いで、登録道路へ復帰したかどうかが調べられる(ステップST33)。すなわち、未登録道路検出手段144は、道路照合手段143から送られてくるマップマッチングの結果がマッチングしたことを示しているかどうか、または、メモリ144aから読み出した走行軌跡データによって示される道路が、地図データ記憶手段142から読み出した道路データによって示される登録道路に復帰したかどうかを調べる。このステップST33において、登録道路へ復帰していないことが判断されると、未登録道路検出終了地点設定処理は終了する。一方、ステップST33において、登録道路へ復帰したことが判断されると、登録道路への復帰地点が保持される(ステップST34)。すなわち、未登録道路検出手段144は、復帰地点を示すデータをメモリ144aに格納する。その後、シーケンスはステップST35に進む。
【0043】
ステップST35においては、検出終了の指示が出されているかどうかが調べられる。すなわち、未登録道路検出手段144は、走行前または走行中に、入力装置130から検出終了地点を設定する指示が送られてきているかどうかを調べる。このステップST35において、検出終了の指示が出されていることが判断されると、次いで、検出終了地点として指示された地点(検出終了指示地点)を既に通過しているかどうかが調べられる(ステップST36)。具体的には、未登録道路検出手段144は、測位手段141から送られてくる現在位置データと入力装置130から入力された検出終了指示地点とを比較することにより、現在位置が検出終了指示地点を既に通過しているかどうかを調べる。
【0044】
このステップST36において、検出終了指示地点を既に通過していることが判断されると、メモリ144aに保存されている復帰地点が検出終了地点に設定される(ステップST37)。その後、未登録道路検出終了地点設定処理は終了する。一方、ステップST36において、検出終了指示地点を通過していないことが判断されると、復帰地点が検出終了地点に設定されずに、未登録道路検出終了地点設定処理は終了する。
【0045】
上記ステップST35において、検出終了地点の指示が出されていないことが判断されると、次いで、再び登録道路から逸脱したかどうかが調べられる(ステップST38)。すなわち、未登録道路検出手段144は、測位手段141から送られてくる現在位置データと地図データ記憶手段142から読み出した道路データとを比較することにより、自車の現在位置が再び登録道路から逸脱したかどうかを調べる。
【0046】
このステップST38において、再び登録道路から逸脱していないことが判断されると、未登録道路検出終了地点設定処理は終了する。一方、ステップST38において、再び登録道路から逸脱したことが判断されると、メモリ144aに保持されている復帰地点が破棄される(ステップST39)。その後、未登録道路検出終了地点設定処理は終了する。
【0047】
ここで、図4に示すように、検出終了指示地点としては、走行前または走行中に入力装置130を操作することにより、復帰地点の手前の検出終了指示地点Cが指示される場合と、復帰地点の先の検出終了指示地点Dが指示される場合がある。
【0048】
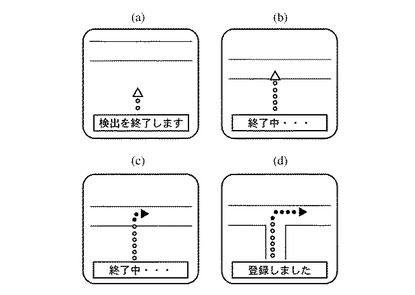
検出終了指示地点Cが指示された場合は、指示された直後は、図8(a)に示すように、表示装置150には、「検出を終了します」というメッセージとともに自車マークが表示され、その後、車両の走行にしたがって、図8(b)および図8(c)に示すように、「終了中・・・」というメッセージとともに自車位置が順次更新されならが表示される。図8(b)は登録道路への復帰地点における表示を示し、図8(c)は復帰地点を通過して登録道路を走行中の表示を示す。そして、未登録道路の登録が完了すると、図8(d)に示すように「登録しました」というメッセージが表示される。
【0049】
検出終了指示地点Cが指示された場合は、図7のフローチャートに示す処理により、検出終了指示地点Cを通過した後に登録道路への復帰地点が保持された時点で、その復帰地点が検出終了地点として設定されることになる。すなわち、ユーザ操作により指定された検出終了地点が検出終了指示地点Cのように、実際の復帰地点へ到達する前の地点であっても、登録道路へ復帰するまで未登録道路検出の検出終了地点を設定せず、実際の復帰地点に到達してから未登録道路の検出終了地点を設定する。
【0050】
一方、検出終了指示地点Dが指示される場合は、図9(a)〜図9(c)に示すように、表示装置150には、車両の走行にしたがって自車位置が順次更新されならが表示され、その後、検出終了指示地点Dが指示されると「検出を終了します」というメッセージとともに道路が表示される。図9(a)は登録道路に復帰する前における表示を示し、図9(b)は復帰地点における表示を示し、図9(c)は登録道路に復帰して登録道路を走行中の表示を示し、図9(d)は検出終了指示地点Dが指示された時の表示を示す。検出終了指示地点Dが指示された場合は、「検出を終了します」というメッセージが表示装置150に表示される。
【0051】
検出終了指示地点Dが指示された場合は、図7のフローチャートに示す処理により、検出終了指示地点Dを通過した時点で、メモリ144aに格納されている復帰地点が検出終了地点として設定されることになる。すなわち、ユーザ操作により指定された検出終了地点が検出終了指示地点Dのように、実際の復帰地点を通過した地点であっても、登録道路に復帰した地点を保持しているので、実際の復帰地点を未登録道路検出の検出終了地点に設定することが可能となる。
【0052】
なお、ユーザにより走行前または走行中に入力されるのは検出終了地点としたが、検出終了道路を入力するように構成することもできる。
【0053】
また、道路照合手段143は、登録道路からの逸脱地点および登録道路への復帰地点を検出する場合は、マップマッチングによる補正を弱めてマップマッチングを行うように構成できる。すなわち、ナビゲーション装置においては、一般に、測位手段141で測定された自車の現在位置と、地図データ記憶手段142から読み出された道路データによって示される登録道路とを照合するマップマッチング処理が行われて自車位置が補正され、この補正された自車位置が表示装置150に表示される。これにより、自車位置と登録道路との位置にずれがあっても、自車位置がその登録道路上に表示されるように修正される。
【0054】
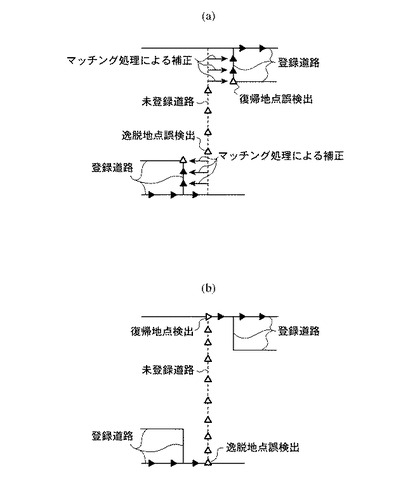
このようなマップマッチング処理によって自車位置が補正されることにより、未登録道路を走行している場合であっても、近傍の登録道路を走行しているとみなされる場合がある。このため、マップマッチング処理で補正された登録道路からの逸脱地点および登録道路への復帰地点を、未登録道路の検出開始地点と検出終了地点の判定に用いた場合、図10(a)に示すように、逸脱地点および復帰地点の近傍で並走する登録道路にマッチングする場合が発生し、逸脱地点および復帰地点を誤って検出する場合がある。また、測位手段141から得られる現在位置データには、GPSに起因する誤差などが含まれる。したがって、マップマッチング処理を行うことなく、測位手段141から得られた自車位置データのみを用いて登録道路からの逸脱地点および登録道路への復帰地点を検出することは困難である。
【0055】
そこで、登録道路からの逸脱地点および登録道路への復帰地点を検出する場合は、道路照合手段143は、自車位置を表示するための一般的なマップマッチング処理を行わずに、それよりも補正を弱めたマップマッチング処理を行い、このマップマッチング処理によって得られた自車位置から、登録道路からの逸脱地点および登録道路への復帰地点を検出するように構成することができる。ここで、補正を弱めたマップマッチング処理は、例えばマッチングしたと判断する未登録道路から登録道路までの距離を、一般的なマップマッチング処理の場合の距離よりも小さくすることによって実現することができる。
【0056】
これにより、図10(b)に示すように、未登録道路を走行しても、逸脱地点および復帰地点の近傍で並走する登録道路にマッチングし難くなるので、逸脱地点および復帰地点を正確に検出することができる。その結果、登録道路から未登録道路への逸脱地点および未登録道路から登録道路への復帰地点の位置検出精度を向上させることができる。また、未登録道路に並走する登録道路への誤マッチングを防止することができる。
【0057】
なお、道路照合手段143は、登録道路からの逸脱地点および登録道路への復帰地点を検出するための補正を弱めたマップマッチング処理に並行して、表示装置150に表示するために、一般的なマップマッチング処理を行うように構成できる。この一般的なマップマッチング処理の結果は、表示制御手段146に送られ、表示装置150に自車の現在位置を表示するために使用される。
【0058】
また、未登録道路検出手段144は、未登録道路の検出開始地点と検出終了地点との間に登録道路が存在する場合は、入力装置130から入力された指示に応じて、検出開始地点から登録道路の始点までの区間、および、登録道路の終点から検出終了地点までの区間を未登録道路として検出するか、登録道路を含む検出開始地点から検出終了地点までの区間を未登録道路として検出するように構成できる。
【0059】
また、未登録道路検出手段144は、入力装置130から検出開始指示地点が入力された後に、該入力装置130から入力されたキャンセルの指示に応じて、未登録道路の検出をキャンセルするように構成できる。
【0060】
さらに、入力装置130からは、未登録道路の検出開始地点に接続される登録道路および未登録道路の検出終了地点に接続される登録道路の少なくとも1つが走行前に入力されるように構成できる。
【0061】
なお、未登録道路の検出開始地点が設定された後、図4に示すように、未登録道路と並走する道路へ誤マッチングし、ユーザが意図していない登録道路へ誤接続される恐れがある。しかしながら、上述した地図情報処理装置によれば、入力装置130によって検出終了指示地点が入力されていない場合は、並走道路へ誤マッチングし、復帰地点を保持したとしても再び逸脱を検出すれば、保持されている復帰地点は破棄され、入力装置130によって入力された検出終了指示地点まで未登録道路の検出終了地点の設定は行われないので、ユーザが意図しない未登録道路が検出されることはない。
【0062】
実施の形態2.
この発明の実施の形態2に係る地図情報処理装置は、登録道路からの逸脱が所定距離または所定時間以上検出されない場合に、未登録道路の検出開始地点の検出を終了するようにしたものである。
【0063】
この実施の形態2に係る地図情報処理装置の構成は、実施の形態1に係る地図情報処理装置の構成と同じである。
【0064】
次に、この発明の実施の形態2に係る地図情報処理装置の動作を説明する。実施の形態2に係る地図情報処理装置の定常時に行われる定時処理は、基本的には図2のフローチャートに示した実施の形態1に係る地図情報処理装置の定時処理と同じであり、ステップST16で行われる未登録道路検出開始地点設定処理の内容が異なる。以下では、実施の形態1と異なる部分を中心に説明する。
【0065】
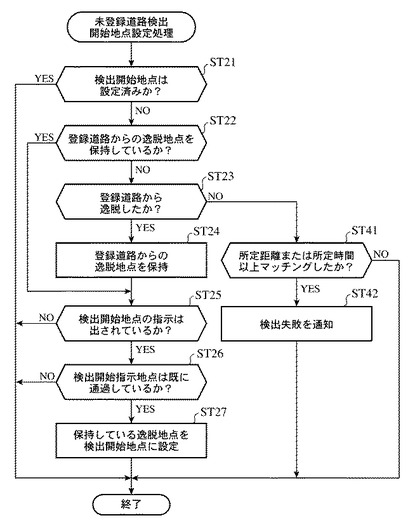
図11は、定時処理のステップST16で行われる未登録道路検出開始地点設定処理の詳細を示すフローチャートである。この未登録道路検出開始地点設定処理では、図3に示した実施の形態1に係る未登録道路検出開始地点設定処理に、ステップST41およびST42が追加されて構成されている。なお、図3のフローチャートに示した処理と同じステップには、図3で使用した符号と同じ符号を付して説明を省略する。
【0066】
すなわち、ステップST23において、登録道路から逸脱していないことが判断されると、所定距離または所定時間以上マッチングしたかどうかが調べられる(ステップST41)。すなわち、未登録道路検出手段144は、道路照合手段143から送られてくるマップマッチングの結果が所定距離または所定時間以上マッチングしていることを示しているかどうか、または、メモリ144aから読み出した走行軌跡データによって示される道路が、地図データ記憶手段142から読み出した道路データによって示される登録道路から所定距離または所定時間以上逸脱しない状態が続いているかどうかを調べる。
【0067】
このステップST41において、所定距離または所定時間以上マッチングしていないことが判断されると、未登録道路検出開始地点設定処理は終了する。一方、ステップST41において、所定距離または所定時間以上マッチングしていることが判断されると、未登録道路検出手段144は、未登録道路へ進入しなかったものと認識し、未登録道路の検出失敗が通知される(ステップST42)。すなわち、表示制御手段146は、未登録道路検出手段144からの指示に応じて、未登録道路の検出失敗を表すメッセージを作成し、表示データとして表示装置150に送る。その後、未登録道路検出開始地点設定処理は終了し、未登録道路の検出は自動終了する。
【0068】
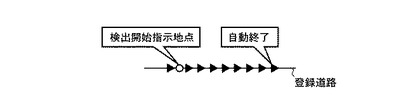
以上の処理により、図12に示すように、走行前または走行中に入力装置130を操作することにより、検出開始指示地点が指示された後に、所定距離または所定時間以上マッチングが継続した場合は、未登録道路の検出は自動終了する。
【0069】
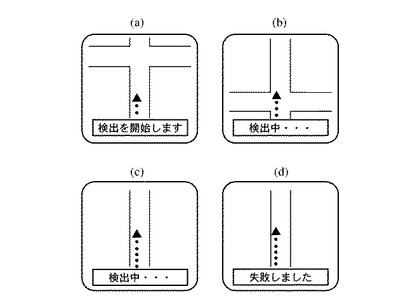
検出開始指示地点が指示された場合は、指示された直後は、図13(a)に示すように、表示装置150には、「検出を開始します」というメッセージとともに自車マークおよび道路が表示され、その後、車両の走行にしたがって、図13(b)および図13(c)に示すように、「検出中・・・」というメッセージとともに自車位置が順次更新されならが表示される。そして、所定距離または所定時間以上逸脱しない状態が続くと、図13(d)に示すように、「失敗しました」というメッセージを表示して未登録道路の検出処理は終了する。
【0070】
実施の形態3.
この発明の実施の形態3に係る地図情報処理装置は、登録道路へ復帰した後に所定距離または所定時間以上が経過した場合に、ユーザによる検出終了の指示がなされてなくても未登録道路の検出終了地点の検出を終了するようにしたものである。
【0071】
この実施の形態3に係る地図情報処理装置の構成は、実施の形態1に係る地図情報処理装置の構成と同じである。
【0072】
次に、この発明の実施の形態3に係る地図情報処理装置の動作を説明する。実施の形態3に係る地図情報処理装置の定常時に行われる定時処理は、基本的には図2のフローチャートに示した実施の形態1に係る地図情報処理装置の定時処理と同じであり、ステップST17で行われる未登録道路検出終了地点設定処理の内容が異なる。以下では、実施の形態1と異なる部分を中心に説明する。
【0073】
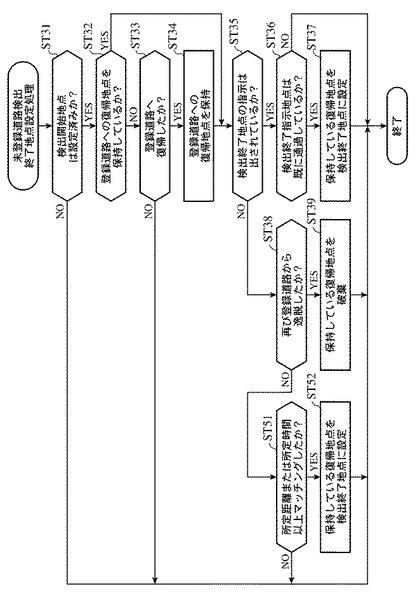
図14は、定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を示すフローチャートである。この未登録道路検出終了地点設定処理では、図7に示した実施の形態1に係る未登録道路検出終了地点設定処理に、ステップST51およびST52が追加されて構成されている。なお、図7のフローチャートに示した処理と同じステップには、図7で使用した符号と同じ符号を付して説明を省略する。
【0074】
すなわち、ステップST38において、再び登録道路から逸脱していないことが判断されると、所定距離または所定時間以上マッチングしたかどうかが調べられる(ステップST51)。すなわち、未登録道路検出手段144は、道路照合手段143から送られてくるマップマッチングの結果が所定距離または所定時間以上マッチングしていることを示しているかどうか、または、メモリ144aから読み出した走行軌跡データによって示される道路が、地図データ記憶手段142から読み出した道路データによって示される登録道路から所定距離または所定時間以上逸脱しない状態が続いているかどうかを調べる。
【0075】
このステップST51において、所定距離または所定時間以上マッチングしていないことが判断されると、未登録道路検出終了地点設定処理は終了する。一方、ステップST51において、所定距離または所定時間以上マッチングしていることが判断されると、未登録道路検出手段144は、登録道路を逸脱しなかったものと認識し、メモリ144aに保存されている復帰地点が検出終了地点に設定される(ステップST52)。その後、未登録道路検出終了地点設定処理は終了し、未登録道路の検出は自動終了する。
【0076】
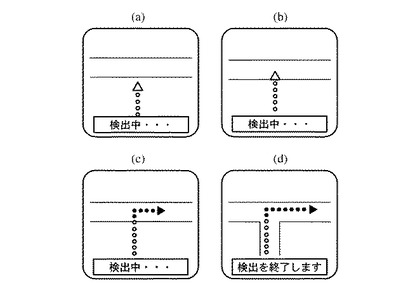
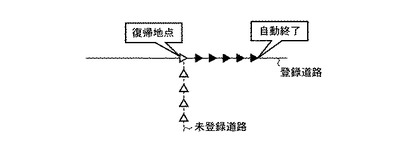
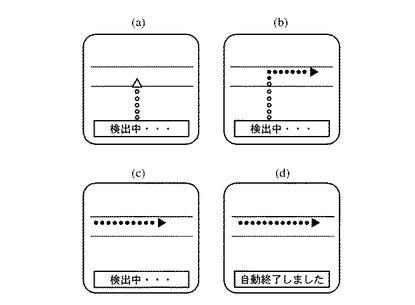
以上の処理により、図15に示すように、復帰地点から登録道路に復帰後に、入力装置130を操作して検出終了指示地点が所定距離または所定時間以上指示されない場合は、未登録道路の検出は自動終了する。
【0077】
検出終了指示地点が指示されない場合は、図16(a)に示すように、表示装置150には、「検出中・・・」というメッセージとともに自車マークおよび道路が表示され、その後、車両の走行にしたがって、図16(b)および図16(c)に示すように、「検出中・・・」というメッセージとともに自車位置が順次更新されならが表示される。そして、所定距離または所定時間以上逸脱しない状態が続くと、図16(d)に示すように、「自動終了しました」というメッセージを表示して未登録道路の検出処理は終了する。
【0078】
実施の形態4.
この発明の実施の形態4に係る地図情報処理装置は、未登録道路の検出開始地点の検出を開始した後、登録道路へ復帰せず駐車状態へ遷移した場合に、未登録道路の検出終了地点の検出を終了するようにしたものである。
【0079】
この実施の形態4に係る地図情報処理装置の構成は、測位手段141の機能を除き、実施の形態1に係る地図情報処理装置の構成と同じである。すなわち、測位手段141は、上述したように、自車の現在位置を算出する他に、車速センサ120から自律航法データとして送られてくる車速情報に含まれる走行速度およびブレーキ状態に基づき車両状態を検出する。具体的には、測位手段141は、車速センサ120から送られてくる走行速度がゼロでない場合は、車両状態は「走行中」、走行速度がゼロであって、且つブレーキ状態によってブレーキのオフが示されている場合は、車両状態は「停車中」、走行速度がゼロであって、且つブレーキ状態によってブレーキのオンが示されている場合は、車両状態は「駐車中」であるとそれぞれ判断する。この測位手段141で判断された車両状態を表すデータは、道路照合手段143および未登録道路検出手段144に送られる。この場合の測位手段141は、この発明の車両状態取得部に対応する。
【0080】
次に、この発明の実施の形態4に係る地図情報処理装置の動作の説明をする。実施の形態4に係る地図情報処理装置の定常時に行われる定時処理は、基本的には図2のフローチャートに示した実施の形態1に係る地図情報処理装置の定時処理と同じであり、ステップST17で行われる未登録道路検出終了地点設定処理の内容が異なる。以下では、実施の形態1と異なる部分を中心に説明する。
【0081】
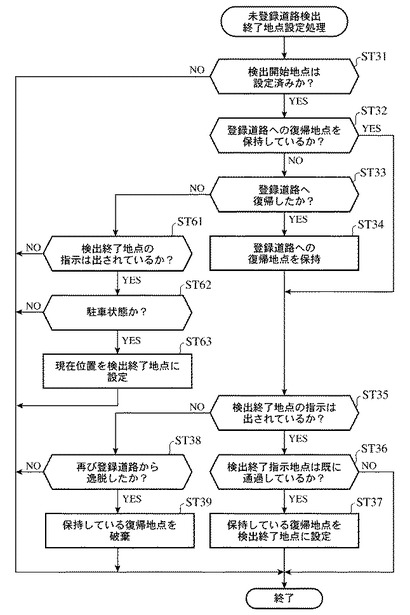
図17は、定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を示すフローチャートである。この未登録道路検出終了地点設定処理では、図7に示した実施の形態1に係る未登録道路検出終了地点設定処理に、ステップST61、ステップST62およびステップST63が追加されて構成されている。なお、図7のフローチャートに示した処理と同じステップには、図7で使用した符号と同じ符号を付して説明を省略する。
【0082】
すなわち、ステップST33において、登録道路へ復帰していないことが判断されると、シーケンスはステップST61に進む。ステップST61においては、検出終了の指示が出されているかどうかが調べられる。すわなち、未登録道路検出手段144は、走行前または走行中に、入力装置130から検出終了地点を設定する指示が送られてきているかどうかを調べる。このステップST61において、検出終了の指示が出されていることが判断されると、次いで、駐車状態であるかどいうかが調べられる(ステップST62)。すなわち、未登録道路検出手段144は、測位手段141から車両状態を表すデータを取得し、車両状態が駐車中であるかどうかを調べる。なお、ステップST61において、検出終了の指示が出されていないことが判断されると、検出終了地点を設定せずに、未登録道路検出終了地点設定処理は終了する。
【0083】
上記ステップST62において、車両状態が駐車中であることが判断されると、現在位置が検出終了地点に設定される(ステップST63)。すなわち、未登録道路検出手段144は、測位手段141から取得した現在位置を未登録道路検出の検出終了地点に設定する。その後、未登録道路検出終了地点設定処理は終了する。なお、ステップST62において、車両状態が駐車中でないことが判断されると、検出終了地点を設定せずに未登録道路検出終了地点設定処理は終了する。
【0084】
以上説明したように、実施の形態4に係る地図情報処理装置によれば、例えば自宅の駐車場などといった行き止まりの未登録道路を検出することが可能になる。
【0085】
なお、上述した実施の形態4に係る地図情報処理装置では、図7に示した実施の形態1に係る未登録道路検出終了地点設定処理に、ステップST61、ステップST62およびステップST63を追加して未登録道路検出終了地点設定処理を行うように構成したが、図14に示した実施の形態3に係る未登録道路検出終了地点設定処理に、図17のステップST61、ステップST62およびステップST63に相当する処理を追加して未登録道路検出終了地点設定処理を行うように構成することもできる。
【0086】
実施の形態5.
この発明の実施の形態5に係る地図情報処理装置は、実施の形態1に係る地図情報処理装置において、未登録道路の検出開始地点を強制的に指示できるようにしたものである。
【0087】
この実施の形態5に係る地図情報処理装置の構成は、実施の形態1に係る地図情報処理装置の構成と同じである。この実施の形態5に係る地図情報処理装置においては、入力装置130は、検出開始地点を強制的に指示するためにも使用される。
【0088】
次に、この発明の実施の形態5に係る地図情報処理装置の動作を説明する。実施の形態5に係る地図情報処理装置の定常時に行われる定時処理は、基本的には図2のフローチャートに示した実施の形態1に係る地図情報処理装置の定時処理と同じであり、ステップST16で行われる未登録道路検出開始地点設定処理の内容が異なる。以下では、実施の形態1と異なる部分を中心に説明する。
【0089】
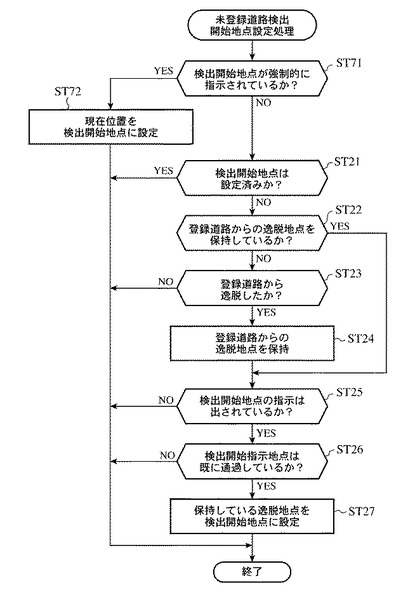
図18は、定時処理のステップST16で行われる未登録道路検出開始地点設定処理の詳細を示すフローチャートである。この未登録道路検出開始地点設定処理では、図3に示した実施の形態1に係る未登録道路検出開始地点設定処理に、ステップST71およびST72が追加されて構成されている。なお、図3のフローチャートに示した処理と同じ処理を行うステップには、図3で使用した符号と同じ符号を付して説明を省略する。
【0090】
未登録道路検出開始地点設定処理では、まず、検出開始地点が強制的に指示されているかどうかが調べられる(ステップST71)。すなわち、未登録道路検出手段144は、入力装置130から、検出開始地点が強制的に指示されているかどうかを調べる。このステップST71において、検出開始地点が強制的に指示されていることが判断されると、現在位置が検出開始地点に設定される(ステップST72)。すなわち、未登録道路検出手段144は、測位手段141から現在位置データを取得し、この現在位置データによって示される地点を検出開始地点とする。その後、未登録道路検出開始地点設定処理は終了する。一方、ステップST71において、検出開始地点が強制的に指示されていないことが判断されると、シーケンスはステップST21に進み、以下、実施の形態1に係る地図情報処理装置と同様の処理が実行される。
【0091】
以上説明したように、実施の形態5に係る地図情報処理装置によれば、例えば自宅の駐車場などといった行き止まり地点から未登録道路の検出を開始することが可能になる。なお、図11に示した実施の形態2の処理に、ステップST71,ステップST72を追加して未登録道路検出開始地点設定処理を行うように構成することもできる。
【0092】
実施の形態6.
この発明の実施の形態6に係る地図情報処理装置は、実施の形態1に係る地図情報処理装置において、未登録道路の検出終了地点を強制的に指示できるようにしたものである。
【0093】
この実施の形態6に係る地図情報処理装置の構成は、実施の形態1に係る地図情報処理装置の構成と同じである。この実施の形態6に係る地図情報処理装置においては、入力装置130は、検出終了地点を強制的に指示するためにも使用される。
【0094】
次に、この発明の実施の形態6に係る地図情報処理装置の動作を説明する。実施の形態6に係る地図情報処理装置の定常時に行われる定時処理は、基本的には図2のフローチャートに示した実施の形態1に係る地図情報処理装置の定時処理と同じであり、ステップST17で行われる未登録道路検出終了地点設定処理の内容が異なる。以下では、実施の形態1と異なる部分を中心に説明する。
【0095】
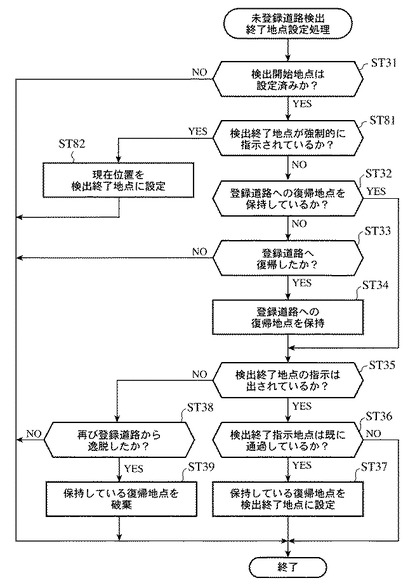
図19は、定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を示すフローチャートである。この未登録道路検出開始地点設定処理では、図7に示した実施の形態1に係る未登録道路検出終了地点設定処理に、ステップST81およびST82が追加されて構成されている。なお、図7のフローチャートに示した処理と同じ処理を行うステップには、図7で使用した符号と同じ符号を付して説明を省略する。
【0096】
未登録道路検出終了地点設定処理では、まず、検出開始地点は設定済みであるかどうかが調べられる(ステップST31)。このステップST31において、検出開始地点が設定済みでないことが判断されると、未登録道路検出終了地点設定処理は終了する。一方、ステップST31において、検出開始地点が設定済みであることが判断されると、次いで、検出終了地点が強制的に指示されているかどうかが調べられる(ステップST81)。すなわち、未登録道路検出手段144は、入力装置130から、検出終了地点が強制的に指示されているかどうかを調べる。
【0097】
このステップST81において、検出終了地点が強制的に指示されていることが判断されると、現在位置が検出終了地点に設定される(ステップST82)。すなわち、未登録道路検出手段144は、測位手段141から現在位置データを取得し、この現在位置データによって示される地点を検出終了地点とする。その後、未登録道路検出終了地点設定処理は終了する。一方、ステップST81において、検出終了地点が強制的に指示されていないことが判断されると、シーケンスはステップST32に進み、以下、実施の形態1に係る地図情報処理装置と同様の処理が実行される。
【0098】
以上説明したように、実施の形態6に係る地図情報処理装置によれば、例えば自宅の駐車場などといった行き止まり地点で未登録道路の検出を終了することが可能になる。なお、図14に示した実施の形態3、図17に示した実施の形態4の処理に、ステップST81,ステップST82を追加して未登録道路終了地点設定処理を行うように構成することもできる。
【0099】
以上のように、この発明に係る地図情報処理装置は、入力装置から未登録道路の検出開始指示地点および検出終了指示地点が入力されている場合に、道路照合手段によるマップマッチングまたはメモリから読み出した走行軌跡データと地図データ記憶手段から読み出した道路データとの比較結果に基づき得られた未登録道路の検出開始地点と検出終了地点との間を未登録道路として検出するように構成したので、誤マッチングを避けることができ、未登録道路の正確なデータが得られる。したがって、車両搭載のナビゲーション装置に内蔵される地図情報処理装置などに用いるのに適している。
【技術分野】
【0001】
この発明は、地図情報を処理する地図情報処理装置に関し、特に、地図データベースに登録されていない未登録道路を検出して地図データベースに登録する技術に関する。
【背景技術】
【0002】
未登録道路を地図データベースに登録する技術として、特許文献1は、道路情報に無い道路を通行した場合、その情報を保持し、新たな道路として登録することにより、CD−ROMの更新や改訂を待つこと無くナビゲーションを可能にしたナビゲーション装置を開示している。このナビゲーション装置は、GPS受信装置と、自車位置を表示する表示装置と、地図情報を格納したCD−ROMからデータを読み出すCD−ROMドライブ装置と、道路情報蓄積メモリを有する制御部とを備え、CD−ROMに格納された道路情報の道路上から自車位置が離れたことを検知した場合、または、使用者の指令に応じて、自車の軌跡データを直線とノードに変換し、道路情報メモリに蓄積を開始し、自車位置がCD−ROMに格納された道路情報の道路上に復帰した場合、または、使用者の指定に応じて蓄積を終了した場合、自車の軌跡データを新たな道路として登録する。
【0003】
また、特許文献2は、既存の地図情報に追加、削除、変更等を行うことができるナビゲーションシステムを開示している。このナビゲーションシステムは、地図情報に基づき地図を表示すると共に、目的地までの経路を探索して経路案内を行うナビゲーションシステムであって、道路の起点または終点となる複数の基準地点を設定する基準地点設定手段と、車両の位置を検出する位置検出手段と、車両が複数の基準地点のうちのいずれか1つの第1の基準地点から異なる第2の地点に地図情報に存在しない道路で移動した場合、位置検出手段により検出された位置情報に基づき道路情報を生成する地図情報生成手段と、地図情報生成手段により生成された道路情報を地図情報の一部として記憶する追加地図情報記憶手段とを備えている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平8−271272号公報
【特許文献2】特開2001−74485号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1に示されたナビゲーション装置は、道路情報によって示される道路と自車位置とを照合し、自車位置が道路上に存在するように修正するマップマッチングを実行しながら自車の軌跡データを道路情報メモリに順次蓄積するので、未登録道路を走行した場合は、その未登録道路の近傍の道路に誤マッチングするという事態が発生し、正確な未登録道路の軌跡データを道路情報メモリに蓄積することができない。その結果、未登録道路の正確なデータが得られないという問題がある。
【0006】
また、特許文献2に開示されたナビゲーションシステムは、道路の起点または終点となる複数の基準地点をあらかじめ設定しておき、車両が複数の基準地点のうちのいずれか1つの基準地点から他の基準地点に地図情報に存在しない道路上を移動した場合に、検出された位置情報に基づき道路情報を生成して地図情報の一部として記憶する。したがって、あらかじめ設定された基準地点が、未登録道路の始点または終点と正確に一致しない場合が発生し、未登録道路の正確なデータが得られないという問題がある。
【0007】
この発明は、上述した問題を解消するためになされたものであり、その課題は、未登録道路の正確なデータを得て、未登録道路を地図情報に追加できる地図情報処理装置を提供することにある。
【課題を解決するための手段】
【0008】
この発明に係る地図情報処理装置は、上記課題を解決するために、現在位置を測位する測位手段と、測位手段による測位によって順次に得られる現在位置を走行軌跡データとして格納するメモリと、登録道路の道路データを含む地図データを記憶する地図データ記憶手段と、地図データ記憶手段から読み出した道路データによって示される登録道路と測位手段によって測位された現在位置とを照合してマップマッチングを行う道路照合手段と、未登録道路の検出を開始すべき地点である検出開始指示地点および検出を終了すべき地点である検出終了指示地点を入力する入力装置と、入力装置から未登録道路の検出開始指示地点および検出終了指示地点が入力されており、且つ、道路照合手段によるマップマッチングまたはメモリから読み出した走行軌跡データと地図データ記憶手段から読み出した道路データとの比較結果に基づき得られた未登録道路の検出開始地点と検出終了地点との間を未登録道路として検出する未登録道路検出手段と、未登録道路検出手段で検出された未登録道路に対応する道路データを生成し、地図データ記憶手段に格納する道路データ生成手段とを備えている。
【発明の効果】
【0009】
この発明によれば、入力装置から未登録道路の検出開始指示地点および検出終了指示地点が入力されている場合に、道路照合手段によるマップマッチングまたはメモリから読み出した走行軌跡データと前記地図データ記憶手段から読み出した道路データとの比較結果に基づき得られた未登録道路の検出開始地点と検出終了地点との間を未登録道路として検出するように構成したので、誤マッチングを避けることができ、未登録道路の正確なデータが得られる。その結果、正確な未登録道路を登録道路として地図情報に追加できる。
【図面の簡単な説明】
【0010】
【図1】この発明の実施の形態1に係る地図情報処理装置が適用されたナビゲーション装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係る地図情報処理装置で行われる定時処理を示すフローチャートである。
【図3】図2に示す定時処理のステップST16で行われる未登録道路検出開始地点設定処理の詳細を示すフローチャートである。
【図4】この発明の実施の形態1に係る地図情報処理装置の動作を説明するための説明図である。
【図5】この発明の実施の形態1に係る地図情報処理装置において未登録道路の検出開始指示が早い時点で行われる場合の表示例を示す図である。
【図6】この発明の実施の形態1に係る地図情報処理装置において未登録道路の検出開始指示が遅い時点で行われる場合の表示例を示す図である。
【図7】図2に示す定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を示すフローチャートである。
【図8】この発明の実施の形態1に係る地図情報処理装置において未登録道路の検出終了指示が早い時点で行われる場合の表示例を示す図である。
【図9】この発明の実施の形態1に係る地図情報処理装置において未登録道路の検出終了指示が遅い時点で行われる場合の表示例を示す図である。
【図10】この発明の実施の形態1に係る地図情報処理装置において補正を弱めてマップマッチングを行う場合の動作を説明するための図である。
【図11】この発明の実施の形態2に係る地図表示装置の定時処理のステップST16で行われる未登録道路検出開始地点設定処理の詳細を示すフローチャートである。
【図12】この発明の実施の形態2に係る地図情報処理装置の動作を説明するための説明図である。
【図13】この発明の実施の形態2に係る地図情報処理装置において未登録道路の検出が開始される場合の表示例を示す図である。
【図14】この発明の実施の形態3に係る地図表示装置の定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を示すフローチャートである。
【図15】この発明の実施の形態3に係る地図情報処理装置の動作を説明するための説明図である。
【図16】この発明の実施の形態3に係る地図情報処理装置において未登録道路の検出が終了する場合の表示例を示す図である。
【図17】この発明の実施の形態4に係る地図表示装置の定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を示すフローチャートである。
【図18】この発明の実施の形態5に係る地図情報処理装置において行われる定時処理のステップST16で行われる未登録道路検出開始地点設定処理の詳細を示すフローチャートである。
【図19】この発明の実施の形態6に係る地図情報処理装置において行われる定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を示すフローチャートである。
【発明を実施するための形態】
【0011】
以下、この発明をより詳細に説明するために、この発明を実施するための最良の形態について、添付の図面にしたがって説明する。
実施の形態1.
図1は、この発明の実施の形態1に係る地図情報処理装置が適用されたナビゲーション装置の構成を示すブロック図である。このナビゲーション装置は、GPS(Global Positioning System)受信機100、方位センサ110、車速センサ120、入力装置130、信号処理機140および表示装置150から構成されている。
【0012】
GPS受信機100は、人工衛星(GPS衛星)からの電波を受信することにより得られた信号から自車の現在位置の緯度、経度および高度などといった位置情報を算出する。このGPS受信機100で算出された位置情報は、信号処理機140に送られる。方位センサ110は、例えばジャイロセンサから構成されており、車両の進行方位を検出する。この方位センサ110で検出された進行方位を表す方位情報は、自律航法データとして信号処理機140に送られる。車速センサ120は、例えば速度計およびブレーキ検出装置などから構成されており、車両の走行速度およびブレーキがオンであるか否かを表すブレーキ状態を検出する。この車速センサ120で検出された走行速度およびブレーキ状態を含む車速情報は、自律航法データとして信号処理機140に送られる。
【0013】
入力装置130は、例えばリモートコントローラ、タッチパネル、音声認識機能付き音声入力装置などから構成されており、ユーザが種々のデータを入力するために使用される。例えば、入力装置130は、道路データとして登録されていない未登録道路を検出する際に、未登録道路の検出開始および検出終了の指示をユーザが入力するために使用される。この入力装置130から入力されたデータは、信号処理機140に送られる。
【0014】
信号処理機140は、例えばコンピュータから構成されており、位置検出、経路探索、経路誘導等といったナビゲーションに必要な機能を実現するための処理の他に、この発明の特徴である未登録道路を検出して登録する処理を行う。この信号処理機140の詳細は後述する。表示装置150は、例えば液晶ディスプレイ装置から構成されており、この発明の表示手段の一部に対応する。この表示装置150は、信号処理機140から送られてくる表示データにしたがって、自車の現在位置、経路等が示された地図、各種メッセージなどを表示する。
【0015】
次に、信号処理機140の詳細を説明する。信号処理機140は、測位手段141、地図データ記憶手段142、道路照合手段143、未登録道路検出手段144、道路データ生成手段145および表示制御手段146から構成されている。これらの構成要素のうち、地図データ記憶手段142以外は、図示しないメモリに記憶されている制御プログラムによって実現されている。
【0016】
測位手段141は、GPS受信機100から送られてくる位置情報と、方位センサ110および車速センサ120から送られてくる自律航法データに基づいて自車の現在位置を算出する。この測位手段141で算出された自車の現在位置を表す現在位置データは、道路照合手段143および未登録道路検出手段144に送られる。
【0017】
地図データ記憶手段142は、例えばハードディスク装置とその読取装置および書込装置とから構成されており、登録道路の道路データを含む地図データを記憶する。この地図データ記憶手段143に記憶されている地図データは、道路照合手段143、未登録道路検出手段144、道路データ生成手段145および表示制御手段146によって読み出される。また、この地図データ記憶手段142には、道路データ生成手段145で生成された道路データが格納される。
【0018】
道路照合手段143は、測位手段141から送られてくる現在位置データによって示される自車の現在位置と地図データ記憶手段142から読み出した道路データとを照合するマップマッチングを行い、このマップマッチングの結果を未登録道路検出手段144および表示制御手段146に送る。
【0019】
未登録道路検出手段144は、メモリ144aを備えている。この未登録道路検出手段144は、測位手段141から送られてくる現在位置データを自車の走行軌跡データとしてメモリ144aに保存する。また、未登録道路検出手段144は、道路照合手段143から送られてくるマップマッチングの結果および入力装置130から入力された指示に基づいて、地図データ記憶手段142に道路データとして登録されていない未登録道路区間(未登録道路の検出開始地点および検出終了地点)を検出し、この検出した未登録道路区間を道路データ生成手段145に送る。
【0020】
道路データ生成手段145は、未登録道路検出手段144から送られてくる未登録道路区間、つまり未登録道路の検出開始地点および検出終了地点から未登録道路の道路データを生成する。この道路データ生成手段145において生成された道路データは、地図データ記憶手段142に送られて該地図データ記憶手段142に格納されるとともに、表示制御手段146に送られることにより表示装置150に未登録道路として表示される。
【0021】
表示制御手段146は、この発明の表示手段の他の一部に対応し、地図データ記憶手段141から読み出した道路データに基づく道路、道路照合手段143から送られてくるマップマッチングの結果に応じて生成したメッセージおよび道路データ生成手段145から送られてくる地図データによって表される未登録道路を表示するための表示データを生成し、表示装置150に送る。
【0022】
次に、上記のように構成される、この発明の実施の形態1に係る地図情報処理装置の動作を説明する。まず、実施の形態1に係る地図情報処理装置の定常時に行われる定時処理を、図2に示すフローチャートを参照しながら説明する。この定時処理は、所定時間間隔で繰り返し実行される。
【0023】
定時処理では、まず、初期化が必要であるかどうかが調べられる(ステップST11)。初期化は、例えば、電源投入直後などに必要とされる。このステップST11において、初期化が必要であることが判断されると、初期化が行われる(ステップST12)。一方、ステップST11において、初期化が必要でないことが判断されると、ステップST12の処理はスキップされる。
【0024】
次いで、測位処理が実行される(ステップST13)。すなわち、測位手段141は、GPS受信機100から送られてくる位置情報と、方位センサ110および車速センサ120から送られてくる自律航法データとに基づいて自車の現在位置を算出し、現在位置データとして道路照合手段143および未登録道路検出手段144に送る。次いで、道路照合処理が実行される(ステップST14)。すなわち、道路照合手段143は、測位手段141から送られてきた現在位置データと地図データ記憶手段142から読み出した道路データとを照合してマップマッチングを行い、このマップマッチングの結果、つまりマッチングがとれたか否かを表すデータを未登録道路検出手段144および表示制御手段146に送る。
【0025】
次いで、走行軌跡データの蓄積が行われる(ステップST15)。すなわち、未登録道路検出手段144は、測位手段141から送られてくる現在位置データを自車の走行軌跡データとしてメモリ144aに保存する。次いで、未登録道路検出開始地点設定処理が実行される(ステップST16)。すなわち、未登録道路検出手段144は、未登録道路の検出開始地点を検出し、この検出結果を道路データ生成手段145に送る。この未登録道路検出開始地点設定処理の詳細は後述する。
【0026】
次いで、未登録道路検出終了地点設定処理が実行される(ステップST17)。すなわち、未登録道路検出手段144は、未登録道路の検出終了地点を検出し、この検出結果を道路データ生成手段145に送る。この未登録道路検出終了地点設定処理の詳細は後述する。次いで、未登録道路区間が確定したかどうかが調べられる(ステップST18)。すなわち、未登録道路の検出開始地点および検出終了地点が両方とも得られたかどうかが調べられる。このステップST18において、未登録道路区間が確定したことが判断されると、道路データ生成処理が実行される(ステップST19)。すなわち、道路データ生成手段145は、未登録道路検出手段144から送られてきた未登録道路の検出開始地点および検出終了地点から未登録道路の道路データを生成し、地図データ記憶手段142に送って該地図データ記憶手段142に記憶させるとともに、表示制御手段146に送る。ステップST18において、未登録道路区間が確定していないことが判断されると、ステップST19の処理はスキップされる。
【0027】
次いで、表示制御処理が実行される(ステップST20)。すなわち、表示制御手段146は、未登録道路の道路データの生成に成功すれば、すなわち、道路データ生成手段145から道路データが送られてくれば、その旨を表すテロップを表示させるための表示データを生成して表示装置150に送るとともに、道路データ生成手段145から受け取った道路データに基づく未登録道路を表示するための表示データを生成して表示装置150に送る。これにより、ユーザは、表示装置150を見ることにより未登録道路が登録されたこと、および、登録された未登録道路を知ることができる。なお、未登録道路が登録された旨は、テロップの表示に加えて、例えば音声でユーザに知らせるように構成することもできる。以上により、定時処理は終了する。
【0028】
次に、定時処理のステップST16で行われる未登録道路検出開始地点設定処理の詳細を、図3に示すフローチャートを参照しながら説明する。この未登録道路検出開始地点設定処理は、未登録道路検出手段144において行われる。
【0029】
未登録道路検出開始地点設定処理では、まず、検出開始地点は設定済みであるかどうかが調べられる(ステップST21)。このステップST21において、検出開始地点が設定済みであることが判断されると、未登録道路検出開始地点設定処理は終了する。一方、ステップST21において、検出開始地点が設定済みでないことが判断されると、次いで、登録道路からの逸脱地点が保持されているかどうかが調べられる(ステップST22)。すなわち、未登録道路検出手段144は、逸脱地点を示すデータがメモリ144aに格納されているかどうかを調べる。このステップST22において、登録道路からの逸脱地点が保持されていることが判断されると、シーケンスはステップST25に進む。
【0030】
一方、ステップST22において、登録道路からの逸脱地点が保持されていないことが判断されると、次いで、登録道路から逸脱したかどうかが調べられる(ステップST23)。すなわち、未登録道路検出手段144は、道路照合手段143から送られてくるマップマッチングの結果がマッチングしていないことを示しているかどうか、または、メモリ144aから読み出した走行軌跡データによって示される道路が、地図データ記憶手段142から読み出した道路データによって示される登録道路から逸脱しているかどうかを調べる。このステップST23において、登録道路から逸脱していないことが判断されると、未登録道路検出開始地点設定処理は終了する。一方、ステップST23において、登録道路から逸脱したことが判断されると、登録道路からの逸脱地点が保持される(ステップST24)。すなわち、未登録道路検出手段144は、逸脱地点を示すデータをメモリ144aに格納する。その後、シーケンスはステップST25に進む。
【0031】
ステップST25においては、検出開始の指示が出されているかどうかが調べられる。すなわち、未登録道路検出手段144は、走行前または走行中に、入力装置130から検出開始地点を設定する指示が送られてきているかどうかを調べる。このステップST25において、検出開始の指示が出されていないことが判断されると、未登録道路検出開始地点設定処理は終了する。
【0032】
一方、ステップST25において、検出開始の指示が出されていることが判断されると、次いで、検出開始地点として指示された地点(検出開始指示地点)を既に通過しているかどうかが調べられる(ステップST26)。具体的には、未登録道路検出手段144は、測位手段141から送られてくる現在位置データと入力装置130から入力された検出開始指示地点とを比較することにより、現在位置が検出開始地点を既に通過しているかどうかを調べる。
【0033】
このステップST26において、検出開始指示地点を通過していることが判断されると、メモリ144aに保存されている逸脱地点が検出開始地点に設定される(ステップST27)。その後、未登録道路検出開始地点設定処理は終了する。一方、ステップST26において、検出開始指示地点が逸脱地点を過ぎていないことが判断されると、逸脱地点が検出開始地点に設定されずに、未登録道路検出開始地点設定処理は終了する。
【0034】
ここで、図4に示すように、検出開始指示地点としては、走行前または走行中に入力装置130を操作することにより、逸脱地点の手前の検出開始指示地点Aが指示される場合と、逸脱地点の先の検出開始指示地点Bが指示される場合がある。なお、図4において、三角印は自車マークを表し、黒塗りの三角印は自車が登録道路上に存在し、白抜きの三角印は、自車が未登録道路、逸脱地点または復帰地点に存在することを表している。以下の各図においても同じである。
【0035】
検出開始指示地点Aが指示された場合は、指示された直後は、図5(a)に示すように、表示装置150には、「検出を開始します」というメッセージとともに自車位置および道路が表示され、その後、車両の走行にしたがって、図5(b)〜図5(d)に示すように、「検出中・・・」というメッセージとともに車両の位置が順次更新されならが表示される。図5(b)は登録道路から逸脱する前における表示を示し、図5(c)は逸脱地点における表示を示し、図5(d)は登録道路を逸脱して未登録道路を走行中の表示を示す。
【0036】
検出開始指示地点Aが指示された場合は、図3のフローチャートに示す処理により、検出開始指示地点Aを通過した後に登録道路からの逸脱地点が保持された時点で、その逸脱地点が検出開始地点として設定されることになる。すなわち、ユーザの操作により指定された検出開始地点が検出開始指示地点Aのように、実際の逸脱地点へ到達する前の地点であっても、登録道路から逸脱するまで未登録道路検出の検出開始地点を設定せず、実際の逸脱地点に到達してから未登録道路の検出開始地点を設定する。
【0037】
一方、検出開始指示地点Bが指示される場合は、図6(a)〜図6(c)に示すように、表示装置150には、車両の走行にしたがって自車位置が順次更新されならが表示され、その後、検出開始指示地点Bが指示されると「検出を開始します」というメッセージとともに道路が表示される。図6(a)は登録道路から逸脱する前における表示を示し、図6(b)は逸脱地点における表示を示し、図6(c)は登録道路を逸脱して未登録道路を走行中の表示を示し、図6(d)は検出開始指示地点Bが指示された時の表示を示す。
【0038】
検出開始指示地点Bが指示された場合は、図3のフローチャートに示す処理により、検出開始指示地点Bを通過した時点で、メモリ144aに格納されている逸脱地点が検出開始地点として設定されることになる。すなわち、ユーザ操作により指定された検出開始地点が検出開始指示地点Bのように、実際の逸脱地点を通過した地点であっても、登録道路から逸脱を開始した逸脱地点を保持しているので、実際の逸脱地点を未登録道路検出の検出開始地点に設定することが可能となる。
【0039】
なお、ユーザにより走行前または走行中に入力されるのは検出開始地点としたが、検出開始道路を入力するように構成することもできる。
【0040】
次に、定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を、図7に示すフローチャートを参照しながら説明する。この未登録道路検出終了地点設定処理は、未登録道路検出手段144において行われる。
【0041】
未登録道路検出終了地点設定処理では、まず、検出開始地点は設定済みであるかどうかが調べられる(ステップST31)。このステップST31において、検出開始地点が設定済みでないことが判断されると、未登録道路検出終了地点設定処理は終了する。一方、ステップST31において、検出開始地点が設定済みであることが判断されると、次いで、登録道路への復帰地点が保持されているかどうかが調べられる(ステップST32)。すなわち、未登録道路検出手段144は、復帰地点を示すデータがメモリ144aに格納されているかどうかを調べる。このステップST32において、登録道路への復帰地点が保持されていることが判断されると、シーケンスはステップST35に進む。
【0042】
一方、ステップST32において、登録道路への復帰地点が保持されていないことが判断されると、次いで、登録道路へ復帰したかどうかが調べられる(ステップST33)。すなわち、未登録道路検出手段144は、道路照合手段143から送られてくるマップマッチングの結果がマッチングしたことを示しているかどうか、または、メモリ144aから読み出した走行軌跡データによって示される道路が、地図データ記憶手段142から読み出した道路データによって示される登録道路に復帰したかどうかを調べる。このステップST33において、登録道路へ復帰していないことが判断されると、未登録道路検出終了地点設定処理は終了する。一方、ステップST33において、登録道路へ復帰したことが判断されると、登録道路への復帰地点が保持される(ステップST34)。すなわち、未登録道路検出手段144は、復帰地点を示すデータをメモリ144aに格納する。その後、シーケンスはステップST35に進む。
【0043】
ステップST35においては、検出終了の指示が出されているかどうかが調べられる。すなわち、未登録道路検出手段144は、走行前または走行中に、入力装置130から検出終了地点を設定する指示が送られてきているかどうかを調べる。このステップST35において、検出終了の指示が出されていることが判断されると、次いで、検出終了地点として指示された地点(検出終了指示地点)を既に通過しているかどうかが調べられる(ステップST36)。具体的には、未登録道路検出手段144は、測位手段141から送られてくる現在位置データと入力装置130から入力された検出終了指示地点とを比較することにより、現在位置が検出終了指示地点を既に通過しているかどうかを調べる。
【0044】
このステップST36において、検出終了指示地点を既に通過していることが判断されると、メモリ144aに保存されている復帰地点が検出終了地点に設定される(ステップST37)。その後、未登録道路検出終了地点設定処理は終了する。一方、ステップST36において、検出終了指示地点を通過していないことが判断されると、復帰地点が検出終了地点に設定されずに、未登録道路検出終了地点設定処理は終了する。
【0045】
上記ステップST35において、検出終了地点の指示が出されていないことが判断されると、次いで、再び登録道路から逸脱したかどうかが調べられる(ステップST38)。すなわち、未登録道路検出手段144は、測位手段141から送られてくる現在位置データと地図データ記憶手段142から読み出した道路データとを比較することにより、自車の現在位置が再び登録道路から逸脱したかどうかを調べる。
【0046】
このステップST38において、再び登録道路から逸脱していないことが判断されると、未登録道路検出終了地点設定処理は終了する。一方、ステップST38において、再び登録道路から逸脱したことが判断されると、メモリ144aに保持されている復帰地点が破棄される(ステップST39)。その後、未登録道路検出終了地点設定処理は終了する。
【0047】
ここで、図4に示すように、検出終了指示地点としては、走行前または走行中に入力装置130を操作することにより、復帰地点の手前の検出終了指示地点Cが指示される場合と、復帰地点の先の検出終了指示地点Dが指示される場合がある。
【0048】
検出終了指示地点Cが指示された場合は、指示された直後は、図8(a)に示すように、表示装置150には、「検出を終了します」というメッセージとともに自車マークが表示され、その後、車両の走行にしたがって、図8(b)および図8(c)に示すように、「終了中・・・」というメッセージとともに自車位置が順次更新されならが表示される。図8(b)は登録道路への復帰地点における表示を示し、図8(c)は復帰地点を通過して登録道路を走行中の表示を示す。そして、未登録道路の登録が完了すると、図8(d)に示すように「登録しました」というメッセージが表示される。
【0049】
検出終了指示地点Cが指示された場合は、図7のフローチャートに示す処理により、検出終了指示地点Cを通過した後に登録道路への復帰地点が保持された時点で、その復帰地点が検出終了地点として設定されることになる。すなわち、ユーザ操作により指定された検出終了地点が検出終了指示地点Cのように、実際の復帰地点へ到達する前の地点であっても、登録道路へ復帰するまで未登録道路検出の検出終了地点を設定せず、実際の復帰地点に到達してから未登録道路の検出終了地点を設定する。
【0050】
一方、検出終了指示地点Dが指示される場合は、図9(a)〜図9(c)に示すように、表示装置150には、車両の走行にしたがって自車位置が順次更新されならが表示され、その後、検出終了指示地点Dが指示されると「検出を終了します」というメッセージとともに道路が表示される。図9(a)は登録道路に復帰する前における表示を示し、図9(b)は復帰地点における表示を示し、図9(c)は登録道路に復帰して登録道路を走行中の表示を示し、図9(d)は検出終了指示地点Dが指示された時の表示を示す。検出終了指示地点Dが指示された場合は、「検出を終了します」というメッセージが表示装置150に表示される。
【0051】
検出終了指示地点Dが指示された場合は、図7のフローチャートに示す処理により、検出終了指示地点Dを通過した時点で、メモリ144aに格納されている復帰地点が検出終了地点として設定されることになる。すなわち、ユーザ操作により指定された検出終了地点が検出終了指示地点Dのように、実際の復帰地点を通過した地点であっても、登録道路に復帰した地点を保持しているので、実際の復帰地点を未登録道路検出の検出終了地点に設定することが可能となる。
【0052】
なお、ユーザにより走行前または走行中に入力されるのは検出終了地点としたが、検出終了道路を入力するように構成することもできる。
【0053】
また、道路照合手段143は、登録道路からの逸脱地点および登録道路への復帰地点を検出する場合は、マップマッチングによる補正を弱めてマップマッチングを行うように構成できる。すなわち、ナビゲーション装置においては、一般に、測位手段141で測定された自車の現在位置と、地図データ記憶手段142から読み出された道路データによって示される登録道路とを照合するマップマッチング処理が行われて自車位置が補正され、この補正された自車位置が表示装置150に表示される。これにより、自車位置と登録道路との位置にずれがあっても、自車位置がその登録道路上に表示されるように修正される。
【0054】
このようなマップマッチング処理によって自車位置が補正されることにより、未登録道路を走行している場合であっても、近傍の登録道路を走行しているとみなされる場合がある。このため、マップマッチング処理で補正された登録道路からの逸脱地点および登録道路への復帰地点を、未登録道路の検出開始地点と検出終了地点の判定に用いた場合、図10(a)に示すように、逸脱地点および復帰地点の近傍で並走する登録道路にマッチングする場合が発生し、逸脱地点および復帰地点を誤って検出する場合がある。また、測位手段141から得られる現在位置データには、GPSに起因する誤差などが含まれる。したがって、マップマッチング処理を行うことなく、測位手段141から得られた自車位置データのみを用いて登録道路からの逸脱地点および登録道路への復帰地点を検出することは困難である。
【0055】
そこで、登録道路からの逸脱地点および登録道路への復帰地点を検出する場合は、道路照合手段143は、自車位置を表示するための一般的なマップマッチング処理を行わずに、それよりも補正を弱めたマップマッチング処理を行い、このマップマッチング処理によって得られた自車位置から、登録道路からの逸脱地点および登録道路への復帰地点を検出するように構成することができる。ここで、補正を弱めたマップマッチング処理は、例えばマッチングしたと判断する未登録道路から登録道路までの距離を、一般的なマップマッチング処理の場合の距離よりも小さくすることによって実現することができる。
【0056】
これにより、図10(b)に示すように、未登録道路を走行しても、逸脱地点および復帰地点の近傍で並走する登録道路にマッチングし難くなるので、逸脱地点および復帰地点を正確に検出することができる。その結果、登録道路から未登録道路への逸脱地点および未登録道路から登録道路への復帰地点の位置検出精度を向上させることができる。また、未登録道路に並走する登録道路への誤マッチングを防止することができる。
【0057】
なお、道路照合手段143は、登録道路からの逸脱地点および登録道路への復帰地点を検出するための補正を弱めたマップマッチング処理に並行して、表示装置150に表示するために、一般的なマップマッチング処理を行うように構成できる。この一般的なマップマッチング処理の結果は、表示制御手段146に送られ、表示装置150に自車の現在位置を表示するために使用される。
【0058】
また、未登録道路検出手段144は、未登録道路の検出開始地点と検出終了地点との間に登録道路が存在する場合は、入力装置130から入力された指示に応じて、検出開始地点から登録道路の始点までの区間、および、登録道路の終点から検出終了地点までの区間を未登録道路として検出するか、登録道路を含む検出開始地点から検出終了地点までの区間を未登録道路として検出するように構成できる。
【0059】
また、未登録道路検出手段144は、入力装置130から検出開始指示地点が入力された後に、該入力装置130から入力されたキャンセルの指示に応じて、未登録道路の検出をキャンセルするように構成できる。
【0060】
さらに、入力装置130からは、未登録道路の検出開始地点に接続される登録道路および未登録道路の検出終了地点に接続される登録道路の少なくとも1つが走行前に入力されるように構成できる。
【0061】
なお、未登録道路の検出開始地点が設定された後、図4に示すように、未登録道路と並走する道路へ誤マッチングし、ユーザが意図していない登録道路へ誤接続される恐れがある。しかしながら、上述した地図情報処理装置によれば、入力装置130によって検出終了指示地点が入力されていない場合は、並走道路へ誤マッチングし、復帰地点を保持したとしても再び逸脱を検出すれば、保持されている復帰地点は破棄され、入力装置130によって入力された検出終了指示地点まで未登録道路の検出終了地点の設定は行われないので、ユーザが意図しない未登録道路が検出されることはない。
【0062】
実施の形態2.
この発明の実施の形態2に係る地図情報処理装置は、登録道路からの逸脱が所定距離または所定時間以上検出されない場合に、未登録道路の検出開始地点の検出を終了するようにしたものである。
【0063】
この実施の形態2に係る地図情報処理装置の構成は、実施の形態1に係る地図情報処理装置の構成と同じである。
【0064】
次に、この発明の実施の形態2に係る地図情報処理装置の動作を説明する。実施の形態2に係る地図情報処理装置の定常時に行われる定時処理は、基本的には図2のフローチャートに示した実施の形態1に係る地図情報処理装置の定時処理と同じであり、ステップST16で行われる未登録道路検出開始地点設定処理の内容が異なる。以下では、実施の形態1と異なる部分を中心に説明する。
【0065】
図11は、定時処理のステップST16で行われる未登録道路検出開始地点設定処理の詳細を示すフローチャートである。この未登録道路検出開始地点設定処理では、図3に示した実施の形態1に係る未登録道路検出開始地点設定処理に、ステップST41およびST42が追加されて構成されている。なお、図3のフローチャートに示した処理と同じステップには、図3で使用した符号と同じ符号を付して説明を省略する。
【0066】
すなわち、ステップST23において、登録道路から逸脱していないことが判断されると、所定距離または所定時間以上マッチングしたかどうかが調べられる(ステップST41)。すなわち、未登録道路検出手段144は、道路照合手段143から送られてくるマップマッチングの結果が所定距離または所定時間以上マッチングしていることを示しているかどうか、または、メモリ144aから読み出した走行軌跡データによって示される道路が、地図データ記憶手段142から読み出した道路データによって示される登録道路から所定距離または所定時間以上逸脱しない状態が続いているかどうかを調べる。
【0067】
このステップST41において、所定距離または所定時間以上マッチングしていないことが判断されると、未登録道路検出開始地点設定処理は終了する。一方、ステップST41において、所定距離または所定時間以上マッチングしていることが判断されると、未登録道路検出手段144は、未登録道路へ進入しなかったものと認識し、未登録道路の検出失敗が通知される(ステップST42)。すなわち、表示制御手段146は、未登録道路検出手段144からの指示に応じて、未登録道路の検出失敗を表すメッセージを作成し、表示データとして表示装置150に送る。その後、未登録道路検出開始地点設定処理は終了し、未登録道路の検出は自動終了する。
【0068】
以上の処理により、図12に示すように、走行前または走行中に入力装置130を操作することにより、検出開始指示地点が指示された後に、所定距離または所定時間以上マッチングが継続した場合は、未登録道路の検出は自動終了する。
【0069】
検出開始指示地点が指示された場合は、指示された直後は、図13(a)に示すように、表示装置150には、「検出を開始します」というメッセージとともに自車マークおよび道路が表示され、その後、車両の走行にしたがって、図13(b)および図13(c)に示すように、「検出中・・・」というメッセージとともに自車位置が順次更新されならが表示される。そして、所定距離または所定時間以上逸脱しない状態が続くと、図13(d)に示すように、「失敗しました」というメッセージを表示して未登録道路の検出処理は終了する。
【0070】
実施の形態3.
この発明の実施の形態3に係る地図情報処理装置は、登録道路へ復帰した後に所定距離または所定時間以上が経過した場合に、ユーザによる検出終了の指示がなされてなくても未登録道路の検出終了地点の検出を終了するようにしたものである。
【0071】
この実施の形態3に係る地図情報処理装置の構成は、実施の形態1に係る地図情報処理装置の構成と同じである。
【0072】
次に、この発明の実施の形態3に係る地図情報処理装置の動作を説明する。実施の形態3に係る地図情報処理装置の定常時に行われる定時処理は、基本的には図2のフローチャートに示した実施の形態1に係る地図情報処理装置の定時処理と同じであり、ステップST17で行われる未登録道路検出終了地点設定処理の内容が異なる。以下では、実施の形態1と異なる部分を中心に説明する。
【0073】
図14は、定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を示すフローチャートである。この未登録道路検出終了地点設定処理では、図7に示した実施の形態1に係る未登録道路検出終了地点設定処理に、ステップST51およびST52が追加されて構成されている。なお、図7のフローチャートに示した処理と同じステップには、図7で使用した符号と同じ符号を付して説明を省略する。
【0074】
すなわち、ステップST38において、再び登録道路から逸脱していないことが判断されると、所定距離または所定時間以上マッチングしたかどうかが調べられる(ステップST51)。すなわち、未登録道路検出手段144は、道路照合手段143から送られてくるマップマッチングの結果が所定距離または所定時間以上マッチングしていることを示しているかどうか、または、メモリ144aから読み出した走行軌跡データによって示される道路が、地図データ記憶手段142から読み出した道路データによって示される登録道路から所定距離または所定時間以上逸脱しない状態が続いているかどうかを調べる。
【0075】
このステップST51において、所定距離または所定時間以上マッチングしていないことが判断されると、未登録道路検出終了地点設定処理は終了する。一方、ステップST51において、所定距離または所定時間以上マッチングしていることが判断されると、未登録道路検出手段144は、登録道路を逸脱しなかったものと認識し、メモリ144aに保存されている復帰地点が検出終了地点に設定される(ステップST52)。その後、未登録道路検出終了地点設定処理は終了し、未登録道路の検出は自動終了する。
【0076】
以上の処理により、図15に示すように、復帰地点から登録道路に復帰後に、入力装置130を操作して検出終了指示地点が所定距離または所定時間以上指示されない場合は、未登録道路の検出は自動終了する。
【0077】
検出終了指示地点が指示されない場合は、図16(a)に示すように、表示装置150には、「検出中・・・」というメッセージとともに自車マークおよび道路が表示され、その後、車両の走行にしたがって、図16(b)および図16(c)に示すように、「検出中・・・」というメッセージとともに自車位置が順次更新されならが表示される。そして、所定距離または所定時間以上逸脱しない状態が続くと、図16(d)に示すように、「自動終了しました」というメッセージを表示して未登録道路の検出処理は終了する。
【0078】
実施の形態4.
この発明の実施の形態4に係る地図情報処理装置は、未登録道路の検出開始地点の検出を開始した後、登録道路へ復帰せず駐車状態へ遷移した場合に、未登録道路の検出終了地点の検出を終了するようにしたものである。
【0079】
この実施の形態4に係る地図情報処理装置の構成は、測位手段141の機能を除き、実施の形態1に係る地図情報処理装置の構成と同じである。すなわち、測位手段141は、上述したように、自車の現在位置を算出する他に、車速センサ120から自律航法データとして送られてくる車速情報に含まれる走行速度およびブレーキ状態に基づき車両状態を検出する。具体的には、測位手段141は、車速センサ120から送られてくる走行速度がゼロでない場合は、車両状態は「走行中」、走行速度がゼロであって、且つブレーキ状態によってブレーキのオフが示されている場合は、車両状態は「停車中」、走行速度がゼロであって、且つブレーキ状態によってブレーキのオンが示されている場合は、車両状態は「駐車中」であるとそれぞれ判断する。この測位手段141で判断された車両状態を表すデータは、道路照合手段143および未登録道路検出手段144に送られる。この場合の測位手段141は、この発明の車両状態取得部に対応する。
【0080】
次に、この発明の実施の形態4に係る地図情報処理装置の動作の説明をする。実施の形態4に係る地図情報処理装置の定常時に行われる定時処理は、基本的には図2のフローチャートに示した実施の形態1に係る地図情報処理装置の定時処理と同じであり、ステップST17で行われる未登録道路検出終了地点設定処理の内容が異なる。以下では、実施の形態1と異なる部分を中心に説明する。
【0081】
図17は、定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を示すフローチャートである。この未登録道路検出終了地点設定処理では、図7に示した実施の形態1に係る未登録道路検出終了地点設定処理に、ステップST61、ステップST62およびステップST63が追加されて構成されている。なお、図7のフローチャートに示した処理と同じステップには、図7で使用した符号と同じ符号を付して説明を省略する。
【0082】
すなわち、ステップST33において、登録道路へ復帰していないことが判断されると、シーケンスはステップST61に進む。ステップST61においては、検出終了の指示が出されているかどうかが調べられる。すわなち、未登録道路検出手段144は、走行前または走行中に、入力装置130から検出終了地点を設定する指示が送られてきているかどうかを調べる。このステップST61において、検出終了の指示が出されていることが判断されると、次いで、駐車状態であるかどいうかが調べられる(ステップST62)。すなわち、未登録道路検出手段144は、測位手段141から車両状態を表すデータを取得し、車両状態が駐車中であるかどうかを調べる。なお、ステップST61において、検出終了の指示が出されていないことが判断されると、検出終了地点を設定せずに、未登録道路検出終了地点設定処理は終了する。
【0083】
上記ステップST62において、車両状態が駐車中であることが判断されると、現在位置が検出終了地点に設定される(ステップST63)。すなわち、未登録道路検出手段144は、測位手段141から取得した現在位置を未登録道路検出の検出終了地点に設定する。その後、未登録道路検出終了地点設定処理は終了する。なお、ステップST62において、車両状態が駐車中でないことが判断されると、検出終了地点を設定せずに未登録道路検出終了地点設定処理は終了する。
【0084】
以上説明したように、実施の形態4に係る地図情報処理装置によれば、例えば自宅の駐車場などといった行き止まりの未登録道路を検出することが可能になる。
【0085】
なお、上述した実施の形態4に係る地図情報処理装置では、図7に示した実施の形態1に係る未登録道路検出終了地点設定処理に、ステップST61、ステップST62およびステップST63を追加して未登録道路検出終了地点設定処理を行うように構成したが、図14に示した実施の形態3に係る未登録道路検出終了地点設定処理に、図17のステップST61、ステップST62およびステップST63に相当する処理を追加して未登録道路検出終了地点設定処理を行うように構成することもできる。
【0086】
実施の形態5.
この発明の実施の形態5に係る地図情報処理装置は、実施の形態1に係る地図情報処理装置において、未登録道路の検出開始地点を強制的に指示できるようにしたものである。
【0087】
この実施の形態5に係る地図情報処理装置の構成は、実施の形態1に係る地図情報処理装置の構成と同じである。この実施の形態5に係る地図情報処理装置においては、入力装置130は、検出開始地点を強制的に指示するためにも使用される。
【0088】
次に、この発明の実施の形態5に係る地図情報処理装置の動作を説明する。実施の形態5に係る地図情報処理装置の定常時に行われる定時処理は、基本的には図2のフローチャートに示した実施の形態1に係る地図情報処理装置の定時処理と同じであり、ステップST16で行われる未登録道路検出開始地点設定処理の内容が異なる。以下では、実施の形態1と異なる部分を中心に説明する。
【0089】
図18は、定時処理のステップST16で行われる未登録道路検出開始地点設定処理の詳細を示すフローチャートである。この未登録道路検出開始地点設定処理では、図3に示した実施の形態1に係る未登録道路検出開始地点設定処理に、ステップST71およびST72が追加されて構成されている。なお、図3のフローチャートに示した処理と同じ処理を行うステップには、図3で使用した符号と同じ符号を付して説明を省略する。
【0090】
未登録道路検出開始地点設定処理では、まず、検出開始地点が強制的に指示されているかどうかが調べられる(ステップST71)。すなわち、未登録道路検出手段144は、入力装置130から、検出開始地点が強制的に指示されているかどうかを調べる。このステップST71において、検出開始地点が強制的に指示されていることが判断されると、現在位置が検出開始地点に設定される(ステップST72)。すなわち、未登録道路検出手段144は、測位手段141から現在位置データを取得し、この現在位置データによって示される地点を検出開始地点とする。その後、未登録道路検出開始地点設定処理は終了する。一方、ステップST71において、検出開始地点が強制的に指示されていないことが判断されると、シーケンスはステップST21に進み、以下、実施の形態1に係る地図情報処理装置と同様の処理が実行される。
【0091】
以上説明したように、実施の形態5に係る地図情報処理装置によれば、例えば自宅の駐車場などといった行き止まり地点から未登録道路の検出を開始することが可能になる。なお、図11に示した実施の形態2の処理に、ステップST71,ステップST72を追加して未登録道路検出開始地点設定処理を行うように構成することもできる。
【0092】
実施の形態6.
この発明の実施の形態6に係る地図情報処理装置は、実施の形態1に係る地図情報処理装置において、未登録道路の検出終了地点を強制的に指示できるようにしたものである。
【0093】
この実施の形態6に係る地図情報処理装置の構成は、実施の形態1に係る地図情報処理装置の構成と同じである。この実施の形態6に係る地図情報処理装置においては、入力装置130は、検出終了地点を強制的に指示するためにも使用される。
【0094】
次に、この発明の実施の形態6に係る地図情報処理装置の動作を説明する。実施の形態6に係る地図情報処理装置の定常時に行われる定時処理は、基本的には図2のフローチャートに示した実施の形態1に係る地図情報処理装置の定時処理と同じであり、ステップST17で行われる未登録道路検出終了地点設定処理の内容が異なる。以下では、実施の形態1と異なる部分を中心に説明する。
【0095】
図19は、定時処理のステップST17で行われる未登録道路検出終了地点設定処理の詳細を示すフローチャートである。この未登録道路検出開始地点設定処理では、図7に示した実施の形態1に係る未登録道路検出終了地点設定処理に、ステップST81およびST82が追加されて構成されている。なお、図7のフローチャートに示した処理と同じ処理を行うステップには、図7で使用した符号と同じ符号を付して説明を省略する。
【0096】
未登録道路検出終了地点設定処理では、まず、検出開始地点は設定済みであるかどうかが調べられる(ステップST31)。このステップST31において、検出開始地点が設定済みでないことが判断されると、未登録道路検出終了地点設定処理は終了する。一方、ステップST31において、検出開始地点が設定済みであることが判断されると、次いで、検出終了地点が強制的に指示されているかどうかが調べられる(ステップST81)。すなわち、未登録道路検出手段144は、入力装置130から、検出終了地点が強制的に指示されているかどうかを調べる。
【0097】
このステップST81において、検出終了地点が強制的に指示されていることが判断されると、現在位置が検出終了地点に設定される(ステップST82)。すなわち、未登録道路検出手段144は、測位手段141から現在位置データを取得し、この現在位置データによって示される地点を検出終了地点とする。その後、未登録道路検出終了地点設定処理は終了する。一方、ステップST81において、検出終了地点が強制的に指示されていないことが判断されると、シーケンスはステップST32に進み、以下、実施の形態1に係る地図情報処理装置と同様の処理が実行される。
【0098】
以上説明したように、実施の形態6に係る地図情報処理装置によれば、例えば自宅の駐車場などといった行き止まり地点で未登録道路の検出を終了することが可能になる。なお、図14に示した実施の形態3、図17に示した実施の形態4の処理に、ステップST81,ステップST82を追加して未登録道路終了地点設定処理を行うように構成することもできる。
【0099】
以上のように、この発明に係る地図情報処理装置は、入力装置から未登録道路の検出開始指示地点および検出終了指示地点が入力されている場合に、道路照合手段によるマップマッチングまたはメモリから読み出した走行軌跡データと地図データ記憶手段から読み出した道路データとの比較結果に基づき得られた未登録道路の検出開始地点と検出終了地点との間を未登録道路として検出するように構成したので、誤マッチングを避けることができ、未登録道路の正確なデータが得られる。したがって、車両搭載のナビゲーション装置に内蔵される地図情報処理装置などに用いるのに適している。
【特許請求の範囲】
【請求項1】
現在位置を測位する測位手段と、
前記測位手段による測位によって順次に得られる現在位置を走行軌跡データとして格納するメモリと、
登録道路の道路データを含む地図データを記憶する地図データ記憶手段と、
前記地図データ記憶手段から読み出した道路データによって示される登録道路と前記測位手段によって測位された現在位置とを照合してマップマッチングを行う道路照合手段と、
未登録道路の検出を開始すべき地点である検出開始指示地点および検出を終了すべき地点である検出終了指示地点を入力する入力装置と、
前記入力装置から未登録道路の検出開始指示地点および検出終了指示地点が入力されており、且つ、前記道路照合手段によるマップマッチングまたは前記メモリから読み出した走行軌跡データと前記地図データ記憶手段から読み出した道路データとの比較結果に基づき得られた未登録道路の検出開始地点と検出終了地点との間を未登録道路として検出する未登録道路検出手段と、
前記未登録道路検出手段で検出された未登録道路に対応する道路データを生成し、前記地図データ記憶手段に格納する道路データ生成手段
とを備えた地図情報処理装置。
【請求項2】
未登録道路検出手段は、入力装置から入力された検出開始指示地点が未登録道路の検出開始地点に到達する前の地点である場合に、道路照合手段によってマップマッチングがとれなくなったことが判断された登録道路からの逸脱地点を検出開始地点とする
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項3】
未登録道路検出手段は、入力装置から入力された検出開始指示地点が未登録道路の検出開始地点に到達した後の地点である場合に、メモリから読み出した走行軌跡データと地図データ記憶手段から読み出した道路データとの一致がとれなくなった登録道路からの逸脱地点を検出開始地点とする
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項4】
未登録道路検出手段は、入力装置から入力された検出終了指示地点が未登録道路の検出終了地点に到達する前の地点である場合に、道路照合手段によってマップマッチングがとれるようになったことが判断された登録道路への復帰地点を検出終了地点とする
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項5】
未登録道路検出手段は、入力装置から入力された検出終了指示地点が未登録道路の検出終了地点に到達した後の地点である場合に、メモリから読み出した走行軌跡データと地図データ記憶手段から読み出した道路データとの一致がとれるようになった登録道路への復帰地点を検出終了地点とする
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項6】
未登録道路検出手段は、入力装置から検出開始指示地点が入力されている場合に、道路照合手段によってマップマッチングがとれて登録道路から逸脱しない状態が所定距離または所定時間以上継続した場合に、未登録道路の検出を終了する
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項7】
未登録道路検出手段は、入力装置から検出終了指示地点が入力されておらず、且つ、道路照合手段によってマップマッチングが所定距離または所定時間以上とれた場合に、前記道路照合手段によってマップマッチングがとれるようになったことが判断された登録道路への復帰地点を検出終了地点とする
ことを特徴とする請求項5記載の地図情報処理装置。
【請求項8】
車両が走行中、停車中または駐車中であるかを表す車両状態を取得する車両状態取得部を備え、
入力装置から検出終了指示地点が入力されており、且つ、前記車両状態取得部により取得された車両状態が駐車中であることを示している場合は、測位手段によって測位された現在位置を検出終了地点とする
ことを特徴とする請求項4または請求項5記載の地図情報処理装置。
【請求項9】
道路照合手段は、登録道路からの逸脱地点および登録道路への復帰地点を検出する場合は、マップマッチングの成否を判定するための補正を弱めてマップマッチングを行う
ことを特徴とする請求項1から請求項8のうちのいずれか1項記載の地図情報処理装置。
【請求項10】
現在位置を表示する表示手段を備え、
道路照合手段は、補正を弱めたマップマッチングに並行して、補正を弱めない一般的なマップマッチングを行い、
前記表示手段は、前記道路照合手段による一般的なマップマッチングの結果に応じて現在位置を表示する
ことを特徴とする請求項9記載の地図情報処理装置。
【請求項11】
未登録道路検出手段は、未登録道路の検出開始地点と検出終了地点との間に登録道路が存在する場合は、入力装置から入力された指示に応じて、検出開始地点から前記登録道路の始点までの区間、および、前記登録道路の終点から検出終了地点までの区間を未登録道路として検出するか、前記登録道路を含む検出開始地点から検出終了地点までの区間を未登録道路として検出する
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項12】
未登録道路検出手段は、入力装置から検出開始指示地点が入力された後に、該入力装置から入力されたキャンセルの指示に応じて、未登録道路の検出をキャンセルする
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項13】
入力装置からは、未登録道路の検出開始地点に接続される登録道路および未登録道路の検出終了地点に接続される登録道路の少なくとも1つが走行前に入力される
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項14】
未登録道路検出手段は、入力装置から検出開始指示地点が強制的に指示された場合に、測位手段により測位された現在位置を検出開始地点とする
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項15】
未登録道路検出手段は、入力装置から検出終了指示地点が強制的に指示された場合に、測位手段により測位された現在位置を検出終了地点とする
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項1】
現在位置を測位する測位手段と、
前記測位手段による測位によって順次に得られる現在位置を走行軌跡データとして格納するメモリと、
登録道路の道路データを含む地図データを記憶する地図データ記憶手段と、
前記地図データ記憶手段から読み出した道路データによって示される登録道路と前記測位手段によって測位された現在位置とを照合してマップマッチングを行う道路照合手段と、
未登録道路の検出を開始すべき地点である検出開始指示地点および検出を終了すべき地点である検出終了指示地点を入力する入力装置と、
前記入力装置から未登録道路の検出開始指示地点および検出終了指示地点が入力されており、且つ、前記道路照合手段によるマップマッチングまたは前記メモリから読み出した走行軌跡データと前記地図データ記憶手段から読み出した道路データとの比較結果に基づき得られた未登録道路の検出開始地点と検出終了地点との間を未登録道路として検出する未登録道路検出手段と、
前記未登録道路検出手段で検出された未登録道路に対応する道路データを生成し、前記地図データ記憶手段に格納する道路データ生成手段
とを備えた地図情報処理装置。
【請求項2】
未登録道路検出手段は、入力装置から入力された検出開始指示地点が未登録道路の検出開始地点に到達する前の地点である場合に、道路照合手段によってマップマッチングがとれなくなったことが判断された登録道路からの逸脱地点を検出開始地点とする
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項3】
未登録道路検出手段は、入力装置から入力された検出開始指示地点が未登録道路の検出開始地点に到達した後の地点である場合に、メモリから読み出した走行軌跡データと地図データ記憶手段から読み出した道路データとの一致がとれなくなった登録道路からの逸脱地点を検出開始地点とする
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項4】
未登録道路検出手段は、入力装置から入力された検出終了指示地点が未登録道路の検出終了地点に到達する前の地点である場合に、道路照合手段によってマップマッチングがとれるようになったことが判断された登録道路への復帰地点を検出終了地点とする
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項5】
未登録道路検出手段は、入力装置から入力された検出終了指示地点が未登録道路の検出終了地点に到達した後の地点である場合に、メモリから読み出した走行軌跡データと地図データ記憶手段から読み出した道路データとの一致がとれるようになった登録道路への復帰地点を検出終了地点とする
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項6】
未登録道路検出手段は、入力装置から検出開始指示地点が入力されている場合に、道路照合手段によってマップマッチングがとれて登録道路から逸脱しない状態が所定距離または所定時間以上継続した場合に、未登録道路の検出を終了する
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項7】
未登録道路検出手段は、入力装置から検出終了指示地点が入力されておらず、且つ、道路照合手段によってマップマッチングが所定距離または所定時間以上とれた場合に、前記道路照合手段によってマップマッチングがとれるようになったことが判断された登録道路への復帰地点を検出終了地点とする
ことを特徴とする請求項5記載の地図情報処理装置。
【請求項8】
車両が走行中、停車中または駐車中であるかを表す車両状態を取得する車両状態取得部を備え、
入力装置から検出終了指示地点が入力されており、且つ、前記車両状態取得部により取得された車両状態が駐車中であることを示している場合は、測位手段によって測位された現在位置を検出終了地点とする
ことを特徴とする請求項4または請求項5記載の地図情報処理装置。
【請求項9】
道路照合手段は、登録道路からの逸脱地点および登録道路への復帰地点を検出する場合は、マップマッチングの成否を判定するための補正を弱めてマップマッチングを行う
ことを特徴とする請求項1から請求項8のうちのいずれか1項記載の地図情報処理装置。
【請求項10】
現在位置を表示する表示手段を備え、
道路照合手段は、補正を弱めたマップマッチングに並行して、補正を弱めない一般的なマップマッチングを行い、
前記表示手段は、前記道路照合手段による一般的なマップマッチングの結果に応じて現在位置を表示する
ことを特徴とする請求項9記載の地図情報処理装置。
【請求項11】
未登録道路検出手段は、未登録道路の検出開始地点と検出終了地点との間に登録道路が存在する場合は、入力装置から入力された指示に応じて、検出開始地点から前記登録道路の始点までの区間、および、前記登録道路の終点から検出終了地点までの区間を未登録道路として検出するか、前記登録道路を含む検出開始地点から検出終了地点までの区間を未登録道路として検出する
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項12】
未登録道路検出手段は、入力装置から検出開始指示地点が入力された後に、該入力装置から入力されたキャンセルの指示に応じて、未登録道路の検出をキャンセルする
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項13】
入力装置からは、未登録道路の検出開始地点に接続される登録道路および未登録道路の検出終了地点に接続される登録道路の少なくとも1つが走行前に入力される
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項14】
未登録道路検出手段は、入力装置から検出開始指示地点が強制的に指示された場合に、測位手段により測位された現在位置を検出開始地点とする
ことを特徴とする請求項1記載の地図情報処理装置。
【請求項15】
未登録道路検出手段は、入力装置から検出終了指示地点が強制的に指示された場合に、測位手段により測位された現在位置を検出終了地点とする
ことを特徴とする請求項1記載の地図情報処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2011−2466(P2011−2466A)
【公開日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願番号】特願2010−210639(P2010−210639)
【出願日】平成22年9月21日(2010.9.21)
【分割の表示】特願2008−538583(P2008−538583)の分割
【原出願日】平成19年6月27日(2007.6.27)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願日】平成22年9月21日(2010.9.21)
【分割の表示】特願2008−538583(P2008−538583)の分割
【原出願日】平成19年6月27日(2007.6.27)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]