
地図情報更新方法及びナビゲーション装置
【目的】 道路幅を正しく測定して地図情報の変更処理を行えるようにする「地図情報更新方法及びナビゲーション装置」を提供することである。
【構成】 ナビゲーション装置において、通過中道路の道路幅を測定して地図情報の道路幅と比較し、異なれば測定した道路幅で地図情報の道路幅を更新する。すなわち、カメラで前方を走行中の車両を含む前方風景を撮影し、車幅検出部は前方車両の車幅Lcを求め、道路幅計算部は撮影画像における車幅と道路幅との比率(例えば、車幅のピクセル数及び道路幅のピクセル数の比)並びに車幅Lcを用いて道路幅LRを算出し、道路幅変更更新処理部は、該道路幅と地図情報の道路幅とを比較し、異なれば算出した道路幅で地図情報の道路幅を更新する。
【構成】 ナビゲーション装置において、通過中道路の道路幅を測定して地図情報の道路幅と比較し、異なれば測定した道路幅で地図情報の道路幅を更新する。すなわち、カメラで前方を走行中の車両を含む前方風景を撮影し、車幅検出部は前方車両の車幅Lcを求め、道路幅計算部は撮影画像における車幅と道路幅との比率(例えば、車幅のピクセル数及び道路幅のピクセル数の比)並びに車幅Lcを用いて道路幅LRを算出し、道路幅変更更新処理部は、該道路幅と地図情報の道路幅とを比較し、異なれば算出した道路幅で地図情報の道路幅を更新する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地図情報更新方法及びナビゲーション装置に係わり、特に通過中道路の道路幅を測定して地図情報の道路幅と比較し、異なれば測定した道路幅で地図情報の道路幅を更新する地図情報更新方法及びナビゲーション装置に関する。
【背景技術】
【0002】
ナビゲーション装置は、車両の現在位置に応じた地図情報をDVDやハードディスクHDD等の地図情報記憶媒体から読み出してディスプレイ画面に描画すると共に、走行に応じて車両マ−クを地図上で移動させ、あるいは車両マークをディスプレイ画面の一定位置(例えばディスプレイ画面の中心位置)に固定表示して地図をスクロ−ル表示する。地図情報は、(1) ノ−ドデータや道路リンクデータ、交差点データ等からなる道路レイヤと、(2) 地図上のオブジェクトを表示するための背景レイヤと、(3) 市町村名などを表示するための文字レイヤなどから構成され、ディスプレイ画面に表示される地図画像は、背景レイヤと文字レイヤに基づいて発生され、マップマッチング処理や誘導経路の探索処理は道路レイヤに基づいて行われる。
道路工事、道路の新設その他により地図情報は陳腐化する。このため、ユーザは新しい地図情報が収録された地図記憶媒体を購入して使用し、あるいは、新しい地図情報を外部のセンターよりダウンロードして地図情報の書き換えを行い、最新の地図情報に基づいてナビゲーション制御を行えるようにしている。又、自車の走行軌跡と地図情報中の道路データとを比較し、道路データが存在しない地点を走行したとき、該走行軌跡を新たな道路として地図情報に追加する技術も周知である。更に、走行中道路の幅、車線数等に関する検出情報と地図情報中のこれら情報(格納情報)を比較し異なる場合に格納情報を書き換える従来技術も提案されている(特許文献1参照)。
【特許文献1】特開2000−230834号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
道路幅(幅員)が3.3m以下の道路は、経路探索の対象道路とならない。このため、道路が地図データベース上で3.3m以下であると、ナビゲーション装置はルート探索の対象道路とせず、例え近道であっても考慮しない。ところが、幅員拡張工事により3.3mより大きくなると経路探索の対象道路となる。上記従来技術によれば、地図情報を工事完了後の幅員に修正できるため、経路探索対象道路にすることができる。しかし、上記従来技術は、具体的に道路幅を測定する方法を開示していない。
従って、本発明の目的は、道路幅を正しく測定して地図情報の更新処理を行えるようにすることである。
【課題を解決するための手段】
【0004】
上記課題は本発明によれば、通過中道路の道路幅を測定して地図情報の道路幅と比較し、異なれば測定した道路幅で地図情報の道路幅を更新する地図情報更新方法及びナビゲーション装置により達成される。
本発明の地図情報更新方法は、前方を走行中の車両を含む前方風景を撮影するステップ、前方車両の車幅を取得するステップ、撮影画像における車幅と道路幅との比率並びに前記取得した車幅を用いて道路幅を算出するステップ、該道路幅と地図情報の道路幅とを比較し、異なれば算出した道路幅で地図情報の道路幅を更新するステップを備えている。本発明の地図情報更新方法において、前記比率は前記撮影画像における車幅のピクセル数及び道路幅のピクセル数の比である。また、本発明の地図情報更新方法において、車幅の取得は、画像より車種を識別し、該車種より前方車両の車幅を測定する。あるいは車々間通信により前方車両より車幅を取得する。
本発明のナビゲーション装置は、前方を走行中の車両を含む前方風景を撮影するカメラ、前方車両の車幅を取得する車幅取得部、撮影画像における車幅と道路幅との比率並びに前記取得した車幅を用いて道路幅を算出する道路幅計算部、該道路幅と地図情報の道路幅とを比較し、異なれば算出した道路幅で地図情報の道路幅を更新する道路幅更新処理部を備えている。上記ナビゲーション装置は、更に、車両が新リンクに進入したか検出するリンク進入検出部を備え、新リンクに進入する毎に前記更新処理を行う。
【発明の効果】
【0005】
本発明によれば、前方を走行中の車両を含む前方風景を撮影し、前方車両の車幅を取得し、撮影画像における車幅と道路幅との比率並びに前記取得した車幅を用いて道路幅を算出し、該道路幅と地図情報の道路幅とを比較し、異なれば算出した道路幅で地図情報の道路幅を更新するようにしたから、道路幅を正しく測定して地図情報の更新処理を行うことができ、幅員拡張された道路を以後経路探索の対象道路とすることができる。
【発明を実施するための最良の形態】
【0006】
ナビゲーション装置において、通過中道路の道路幅を測定して地図情報の道路幅と比較し、異なれば測定した道路幅で地図情報の道路幅を更新する。すなわち、カメラで前方を走行中の車両を含む前方風景を撮影し、車幅取得部は前方車両の車幅を取得し、道路幅計算部は撮影画像における車幅と道路幅との比率(例えば、車幅のピクセル数及び道路幅のピクセル数の比)並びに前記取得した車幅を用いて道路幅を算出し、道路幅更新処理部は、該道路幅と地図情報の道路幅とを比較し、異なれば算出した道路幅で地図情報の道路幅を更新する。
【実施例】
【0007】
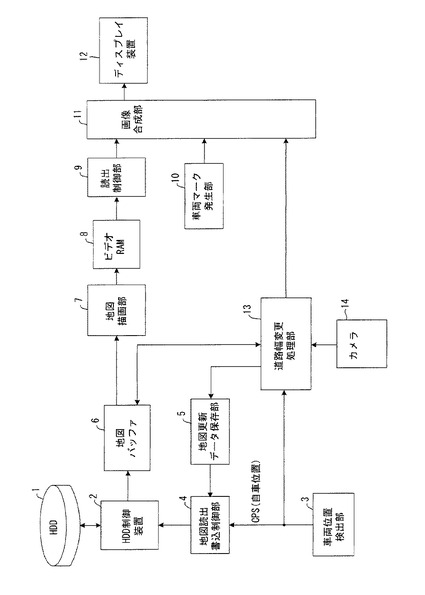
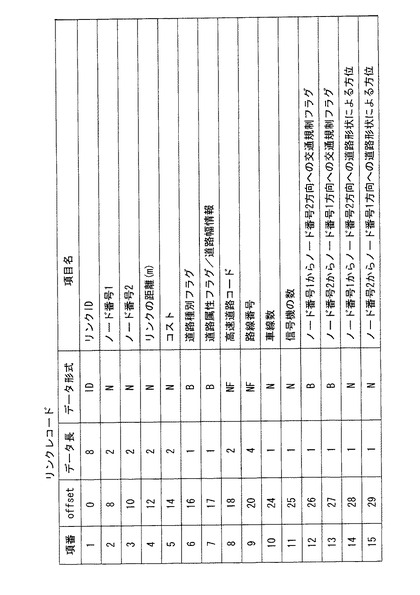
図1は本発明のナビゲーション装置の構成図である。地図情報はハードディスク(HDD)1に格納されており、HDD制御装置2が該HDDから地図情報を読出し、あるいは地図情報の書き換えを行う。地図情報の道路レイヤに含まれる道路リンクのリンクレコードは図2に示す構成をそなえ、リンクレコードの項番7の1バイトデータは道路幅情報を含み、項番10の1バイトデータは車線数情報を含んでいる。
車両位置検出部3は自立航法センサやGPSを備え、自車位置CPSを検出して出力する。地図読出書込制御部4は、自車位置に基づいてHDD制御装置2を制御してHDD 1より自車周辺の地図情報を読み出し、また、地図更新データ保存部5に記憶されたデータで、HDD1の陳腐化した地図情報を更新する(書き換える)。地図バッファ6はHDD1から読み出された地図情報を記憶し、地図スクロールができるように自車位置周辺の複数枚(複数ユニット)の地図情報、例えば3×3ユニットの地図情報を記憶する。
地図描画部7は、地図バッファ6に記憶された地図情報を用いて地図画像を発生し、VRAM8は地図画像を記憶し、読出制御部9は画面中心位置(自車位置)に基づいてVRAM8より切り出す1画面分の位置を変えて自車位置の移動に従って地図をスクロール表示する。車両マーク発生部10は自車位置を示す車両マークを発生し、画像合成部11は地図、車両マークなどを合成して出力し、ディスプレイ装置12は合成画像を描画する。
道路幅変更処理部13は、(1)カメラ14で撮影した前方走行中の車両を含む前方風景を取り込み、(2)前方車両の画像より車種を識別し、該車種より車幅を求め、また、(3)撮影画像をディスプレイ装置12に表示したときの車幅のピクセル数及び道路幅のピクセル数並びに車幅を用いて比例計算により道路幅を算出し、(4)該道路幅と地図情報の道路幅とを比較し、異なれば算出した実際の道路幅を地図更新データ保存部5に保存し、HDD1に記憶されている地図情報の道路幅を更新する。
なお、画像をビットマップ形式で保存する画像メモリにおけるビット数を前記ピクセル数に変えて用いることができる。また、カメラで撮影した前方風景はディスプレイ装置12に選択的に表示することができる。
【0008】
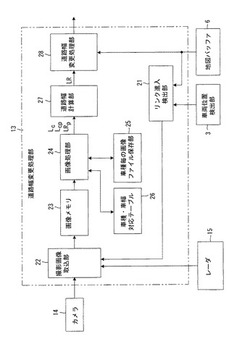
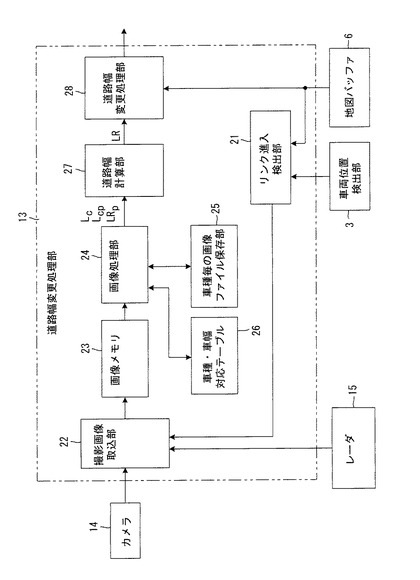
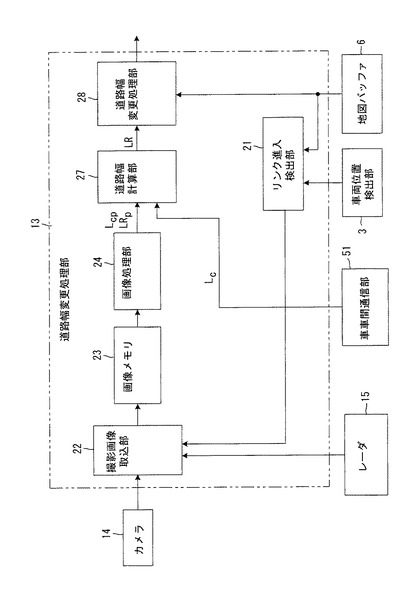
図3は道路幅変更処理部13の構成図、図4は道路幅測定説明図である。
リンク進入検出部21は車両位置と地図情報を用いて車両が新たな道路リンクに進入したか監視し、進入すれば撮影画像取込部22に画像取込を指示する。レーダ15は前方に車両が存在するか検出し、存在すれば前方車両検出信号を撮影画像取込部22に入力する。
撮影画像取込部22は、画像取込が指示され、かつ、前方に車両が存在すれば、カメラ14で撮影した前方風景画像(図4参照)を取り込んで画像メモリ23に入力し、画像メモリ23はビットマップ形式で前方風景画像を記憶する。
画像処理部24は前方風景画像より車両画像部分CIMを抽出し、画像ファイル保存部25に保存されている車種毎の画像と比較し、前方走行車両の車種を識別し、車種・車幅対応テーブル26より前方走行車両の車幅Lc(m)を検出する。なお、車幅Lc(m)はレーダ15により検出することもできる。
【0009】
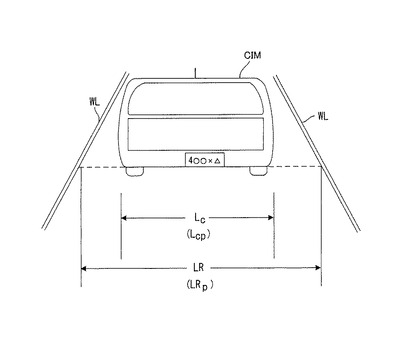
ついで、画像処理部24は、撮影画像を処理して道路上に引かれている白線WL(図4)を検出し、撮影画像をディスプレイ装置に表示したときの白線間のピクセル数LRpおよび車幅のピクセル数Lcp を求める。なお、画像メモリにおける白線間のビット数および車幅のビット数をピクセル数に変えて用いることができる。
車幅Lc(m)、白線間のピクセル数LRpおよび車幅のピクセル数Lcpが求まれば、道路幅計算部27は次式
【数1】

により白線間距離LRを算出する。この白線間距離LRが道路幅となる。たとえば、
Lc=1.7m
Lcp=200pixel (表示画面上)
LR'=Xm (未知)
LRp=384pixel (表示画面上)
とすれば、(1)式により、LR=3.264mとなる。
以上では、白線間距離LRを道路幅としたが、エッジ検出により道路両側のエッジを検出し、エッジ間距離を道路幅とすることもできる。
道路幅が求まれば、道路幅変更処理部28は、算出した道路幅LRと地図情報中の道路幅を比較し、比較の結果、測定した実際の道路幅と地図情報の道路幅が異なれば、測定した道路幅LRを地図更新データ保存部5に格納し、地図読出書込制御部4はHDD制御装置2を制御して保存した道路幅LRで地図情報に含まれる道路リンクの道路幅を書換える。
以上では、撮影した前方風景画像より車両画像部分を抽出し、画像処理により前方車両の車幅を測定したが、前方車両と車々間通信により車幅を取得することもできる。図5はかかる道路幅変更処理部の別の構成図であり、図3と同一部分には同一符号を付している。異なる点は、図3より画像ファイル保存部25、車種・車幅対応テーブル26を削除し、代わりに車々間通信部51を設け、該車々間通信部51が前方車両と通信を行って該前方車両の車幅Lcを取得して道路幅計算部27に入力し、道路幅計算部27が該車幅Lcを用いて(1)式により道路幅を計算する点である。
以上、本発明によれば、実際の道路幅をリアルタイムに算出し、地図情報の道路幅と異なっていればデータを書換えることで次回以降のルート探索時に対象道路とすることが出来る。
【図面の簡単な説明】
【0010】
【図1】本発明のナビゲーション装置の構成図である。
【図2】道路リンクのリンクレコード説明図である。
【図3】道路幅変更処理部の構成図である。
【図4】道路幅測定説明図である。
【図5】道路幅変更処理部の別の構成図である。
【符号の説明】
【0011】
3 車両位置検出部
6 地図バッファ
13 道路幅変更処理部
14 カメラ
15 レーダ
21 リンク進入検出部
22 撮影画像取込部
23 画像メモリ
24 画像処理部
25 画像ファイル保存部
26 車種・車幅対応テーブル
27 道路幅計算部
28 道路幅変更処理部
【技術分野】
【0001】
本発明は、地図情報更新方法及びナビゲーション装置に係わり、特に通過中道路の道路幅を測定して地図情報の道路幅と比較し、異なれば測定した道路幅で地図情報の道路幅を更新する地図情報更新方法及びナビゲーション装置に関する。
【背景技術】
【0002】
ナビゲーション装置は、車両の現在位置に応じた地図情報をDVDやハードディスクHDD等の地図情報記憶媒体から読み出してディスプレイ画面に描画すると共に、走行に応じて車両マ−クを地図上で移動させ、あるいは車両マークをディスプレイ画面の一定位置(例えばディスプレイ画面の中心位置)に固定表示して地図をスクロ−ル表示する。地図情報は、(1) ノ−ドデータや道路リンクデータ、交差点データ等からなる道路レイヤと、(2) 地図上のオブジェクトを表示するための背景レイヤと、(3) 市町村名などを表示するための文字レイヤなどから構成され、ディスプレイ画面に表示される地図画像は、背景レイヤと文字レイヤに基づいて発生され、マップマッチング処理や誘導経路の探索処理は道路レイヤに基づいて行われる。
道路工事、道路の新設その他により地図情報は陳腐化する。このため、ユーザは新しい地図情報が収録された地図記憶媒体を購入して使用し、あるいは、新しい地図情報を外部のセンターよりダウンロードして地図情報の書き換えを行い、最新の地図情報に基づいてナビゲーション制御を行えるようにしている。又、自車の走行軌跡と地図情報中の道路データとを比較し、道路データが存在しない地点を走行したとき、該走行軌跡を新たな道路として地図情報に追加する技術も周知である。更に、走行中道路の幅、車線数等に関する検出情報と地図情報中のこれら情報(格納情報)を比較し異なる場合に格納情報を書き換える従来技術も提案されている(特許文献1参照)。
【特許文献1】特開2000−230834号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
道路幅(幅員)が3.3m以下の道路は、経路探索の対象道路とならない。このため、道路が地図データベース上で3.3m以下であると、ナビゲーション装置はルート探索の対象道路とせず、例え近道であっても考慮しない。ところが、幅員拡張工事により3.3mより大きくなると経路探索の対象道路となる。上記従来技術によれば、地図情報を工事完了後の幅員に修正できるため、経路探索対象道路にすることができる。しかし、上記従来技術は、具体的に道路幅を測定する方法を開示していない。
従って、本発明の目的は、道路幅を正しく測定して地図情報の更新処理を行えるようにすることである。
【課題を解決するための手段】
【0004】
上記課題は本発明によれば、通過中道路の道路幅を測定して地図情報の道路幅と比較し、異なれば測定した道路幅で地図情報の道路幅を更新する地図情報更新方法及びナビゲーション装置により達成される。
本発明の地図情報更新方法は、前方を走行中の車両を含む前方風景を撮影するステップ、前方車両の車幅を取得するステップ、撮影画像における車幅と道路幅との比率並びに前記取得した車幅を用いて道路幅を算出するステップ、該道路幅と地図情報の道路幅とを比較し、異なれば算出した道路幅で地図情報の道路幅を更新するステップを備えている。本発明の地図情報更新方法において、前記比率は前記撮影画像における車幅のピクセル数及び道路幅のピクセル数の比である。また、本発明の地図情報更新方法において、車幅の取得は、画像より車種を識別し、該車種より前方車両の車幅を測定する。あるいは車々間通信により前方車両より車幅を取得する。
本発明のナビゲーション装置は、前方を走行中の車両を含む前方風景を撮影するカメラ、前方車両の車幅を取得する車幅取得部、撮影画像における車幅と道路幅との比率並びに前記取得した車幅を用いて道路幅を算出する道路幅計算部、該道路幅と地図情報の道路幅とを比較し、異なれば算出した道路幅で地図情報の道路幅を更新する道路幅更新処理部を備えている。上記ナビゲーション装置は、更に、車両が新リンクに進入したか検出するリンク進入検出部を備え、新リンクに進入する毎に前記更新処理を行う。
【発明の効果】
【0005】
本発明によれば、前方を走行中の車両を含む前方風景を撮影し、前方車両の車幅を取得し、撮影画像における車幅と道路幅との比率並びに前記取得した車幅を用いて道路幅を算出し、該道路幅と地図情報の道路幅とを比較し、異なれば算出した道路幅で地図情報の道路幅を更新するようにしたから、道路幅を正しく測定して地図情報の更新処理を行うことができ、幅員拡張された道路を以後経路探索の対象道路とすることができる。
【発明を実施するための最良の形態】
【0006】
ナビゲーション装置において、通過中道路の道路幅を測定して地図情報の道路幅と比較し、異なれば測定した道路幅で地図情報の道路幅を更新する。すなわち、カメラで前方を走行中の車両を含む前方風景を撮影し、車幅取得部は前方車両の車幅を取得し、道路幅計算部は撮影画像における車幅と道路幅との比率(例えば、車幅のピクセル数及び道路幅のピクセル数の比)並びに前記取得した車幅を用いて道路幅を算出し、道路幅更新処理部は、該道路幅と地図情報の道路幅とを比較し、異なれば算出した道路幅で地図情報の道路幅を更新する。
【実施例】
【0007】
図1は本発明のナビゲーション装置の構成図である。地図情報はハードディスク(HDD)1に格納されており、HDD制御装置2が該HDDから地図情報を読出し、あるいは地図情報の書き換えを行う。地図情報の道路レイヤに含まれる道路リンクのリンクレコードは図2に示す構成をそなえ、リンクレコードの項番7の1バイトデータは道路幅情報を含み、項番10の1バイトデータは車線数情報を含んでいる。
車両位置検出部3は自立航法センサやGPSを備え、自車位置CPSを検出して出力する。地図読出書込制御部4は、自車位置に基づいてHDD制御装置2を制御してHDD 1より自車周辺の地図情報を読み出し、また、地図更新データ保存部5に記憶されたデータで、HDD1の陳腐化した地図情報を更新する(書き換える)。地図バッファ6はHDD1から読み出された地図情報を記憶し、地図スクロールができるように自車位置周辺の複数枚(複数ユニット)の地図情報、例えば3×3ユニットの地図情報を記憶する。
地図描画部7は、地図バッファ6に記憶された地図情報を用いて地図画像を発生し、VRAM8は地図画像を記憶し、読出制御部9は画面中心位置(自車位置)に基づいてVRAM8より切り出す1画面分の位置を変えて自車位置の移動に従って地図をスクロール表示する。車両マーク発生部10は自車位置を示す車両マークを発生し、画像合成部11は地図、車両マークなどを合成して出力し、ディスプレイ装置12は合成画像を描画する。
道路幅変更処理部13は、(1)カメラ14で撮影した前方走行中の車両を含む前方風景を取り込み、(2)前方車両の画像より車種を識別し、該車種より車幅を求め、また、(3)撮影画像をディスプレイ装置12に表示したときの車幅のピクセル数及び道路幅のピクセル数並びに車幅を用いて比例計算により道路幅を算出し、(4)該道路幅と地図情報の道路幅とを比較し、異なれば算出した実際の道路幅を地図更新データ保存部5に保存し、HDD1に記憶されている地図情報の道路幅を更新する。
なお、画像をビットマップ形式で保存する画像メモリにおけるビット数を前記ピクセル数に変えて用いることができる。また、カメラで撮影した前方風景はディスプレイ装置12に選択的に表示することができる。
【0008】
図3は道路幅変更処理部13の構成図、図4は道路幅測定説明図である。
リンク進入検出部21は車両位置と地図情報を用いて車両が新たな道路リンクに進入したか監視し、進入すれば撮影画像取込部22に画像取込を指示する。レーダ15は前方に車両が存在するか検出し、存在すれば前方車両検出信号を撮影画像取込部22に入力する。
撮影画像取込部22は、画像取込が指示され、かつ、前方に車両が存在すれば、カメラ14で撮影した前方風景画像(図4参照)を取り込んで画像メモリ23に入力し、画像メモリ23はビットマップ形式で前方風景画像を記憶する。
画像処理部24は前方風景画像より車両画像部分CIMを抽出し、画像ファイル保存部25に保存されている車種毎の画像と比較し、前方走行車両の車種を識別し、車種・車幅対応テーブル26より前方走行車両の車幅Lc(m)を検出する。なお、車幅Lc(m)はレーダ15により検出することもできる。
【0009】
ついで、画像処理部24は、撮影画像を処理して道路上に引かれている白線WL(図4)を検出し、撮影画像をディスプレイ装置に表示したときの白線間のピクセル数LRpおよび車幅のピクセル数Lcp を求める。なお、画像メモリにおける白線間のビット数および車幅のビット数をピクセル数に変えて用いることができる。
車幅Lc(m)、白線間のピクセル数LRpおよび車幅のピクセル数Lcpが求まれば、道路幅計算部27は次式
【数1】
により白線間距離LRを算出する。この白線間距離LRが道路幅となる。たとえば、
Lc=1.7m
Lcp=200pixel (表示画面上)
LR'=Xm (未知)
LRp=384pixel (表示画面上)
とすれば、(1)式により、LR=3.264mとなる。
以上では、白線間距離LRを道路幅としたが、エッジ検出により道路両側のエッジを検出し、エッジ間距離を道路幅とすることもできる。
道路幅が求まれば、道路幅変更処理部28は、算出した道路幅LRと地図情報中の道路幅を比較し、比較の結果、測定した実際の道路幅と地図情報の道路幅が異なれば、測定した道路幅LRを地図更新データ保存部5に格納し、地図読出書込制御部4はHDD制御装置2を制御して保存した道路幅LRで地図情報に含まれる道路リンクの道路幅を書換える。
以上では、撮影した前方風景画像より車両画像部分を抽出し、画像処理により前方車両の車幅を測定したが、前方車両と車々間通信により車幅を取得することもできる。図5はかかる道路幅変更処理部の別の構成図であり、図3と同一部分には同一符号を付している。異なる点は、図3より画像ファイル保存部25、車種・車幅対応テーブル26を削除し、代わりに車々間通信部51を設け、該車々間通信部51が前方車両と通信を行って該前方車両の車幅Lcを取得して道路幅計算部27に入力し、道路幅計算部27が該車幅Lcを用いて(1)式により道路幅を計算する点である。
以上、本発明によれば、実際の道路幅をリアルタイムに算出し、地図情報の道路幅と異なっていればデータを書換えることで次回以降のルート探索時に対象道路とすることが出来る。
【図面の簡単な説明】
【0010】
【図1】本発明のナビゲーション装置の構成図である。
【図2】道路リンクのリンクレコード説明図である。
【図3】道路幅変更処理部の構成図である。
【図4】道路幅測定説明図である。
【図5】道路幅変更処理部の別の構成図である。
【符号の説明】
【0011】
3 車両位置検出部
6 地図バッファ
13 道路幅変更処理部
14 カメラ
15 レーダ
21 リンク進入検出部
22 撮影画像取込部
23 画像メモリ
24 画像処理部
25 画像ファイル保存部
26 車種・車幅対応テーブル
27 道路幅計算部
28 道路幅変更処理部
【特許請求の範囲】
【請求項1】
通過中道路の道路幅を測定して地図情報における道路幅と比較し、異なれば測定した道路幅で地図情報の道路幅を更新する地図情報更新方法において、
前方を走行中の車両を含む前方風景を撮影し、
前方車両の車幅を取得し、
撮影画像における車幅と道路幅との比率および前記取得した車幅を用いて道路幅を算出し、
該道路幅と地図情報の道路幅とを比較し、異なれば算出した道路幅で地図情報の道路幅を更新する、
ことを特徴とする地図情報更新方法。
【請求項2】
前記比率は、前記撮影画像における車幅のピクセル数及び道路幅のピクセル数の比であることを特徴とする請求項1記載の地図情報更新方法。
【請求項3】
前方車両の画像より車種を識別し、該車種より前方車両の車幅を測定することを特徴とする請求項1記載の地図情報更新方法。
【請求項4】
車々間通信により前方車両から前記車幅を取得する、
ことを特徴とする請求項1記載の地図更新方法。
【請求項5】
通過中道路の道路幅を測定して地図情報の道路幅と比較し、異なれば測定した道路幅で地図情報の道路幅を更新するナビゲーション装置において、
前方を走行中の車両を含む前方風景を撮影するカメラ、
前方車両の車幅を取得する車幅取得部、
撮影画像における車幅と道路幅との比率および前記取得した車幅を用いて道路幅を算出する道路幅計算部、
該道路幅と地図情報の道路幅とを比較し、異なれば算出した道路幅で地図情報の道路幅を更新する道路幅更新処理部、
を備えたことを特徴とするナビゲーション装置。
【請求項6】
車両が新リンクに進入したか検出するリンク進入検出部、
を備え、新リンクに進入する毎に前記更新処理を行う、
ことを特徴とする請求項5記載のナビゲーション装置。
【請求項7】
前記道路幅計算部は、前記比率を前記撮影画像における車幅のピクセル数及び道路幅のピクセル数の比より算出する、
ことを特徴とする請求項5記載のナビゲーション装置。
【請求項8】
前記車幅取得部は、車々間通信により前方車両から前記車幅を取得する、
ことを特徴とする請求項5記載のナビゲーション装置
【請求項1】
通過中道路の道路幅を測定して地図情報における道路幅と比較し、異なれば測定した道路幅で地図情報の道路幅を更新する地図情報更新方法において、
前方を走行中の車両を含む前方風景を撮影し、
前方車両の車幅を取得し、
撮影画像における車幅と道路幅との比率および前記取得した車幅を用いて道路幅を算出し、
該道路幅と地図情報の道路幅とを比較し、異なれば算出した道路幅で地図情報の道路幅を更新する、
ことを特徴とする地図情報更新方法。
【請求項2】
前記比率は、前記撮影画像における車幅のピクセル数及び道路幅のピクセル数の比であることを特徴とする請求項1記載の地図情報更新方法。
【請求項3】
前方車両の画像より車種を識別し、該車種より前方車両の車幅を測定することを特徴とする請求項1記載の地図情報更新方法。
【請求項4】
車々間通信により前方車両から前記車幅を取得する、
ことを特徴とする請求項1記載の地図更新方法。
【請求項5】
通過中道路の道路幅を測定して地図情報の道路幅と比較し、異なれば測定した道路幅で地図情報の道路幅を更新するナビゲーション装置において、
前方を走行中の車両を含む前方風景を撮影するカメラ、
前方車両の車幅を取得する車幅取得部、
撮影画像における車幅と道路幅との比率および前記取得した車幅を用いて道路幅を算出する道路幅計算部、
該道路幅と地図情報の道路幅とを比較し、異なれば算出した道路幅で地図情報の道路幅を更新する道路幅更新処理部、
を備えたことを特徴とするナビゲーション装置。
【請求項6】
車両が新リンクに進入したか検出するリンク進入検出部、
を備え、新リンクに進入する毎に前記更新処理を行う、
ことを特徴とする請求項5記載のナビゲーション装置。
【請求項7】
前記道路幅計算部は、前記比率を前記撮影画像における車幅のピクセル数及び道路幅のピクセル数の比より算出する、
ことを特徴とする請求項5記載のナビゲーション装置。
【請求項8】
前記車幅取得部は、車々間通信により前方車両から前記車幅を取得する、
ことを特徴とする請求項5記載のナビゲーション装置
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2007−4655(P2007−4655A)
【公開日】平成19年1月11日(2007.1.11)
【国際特許分類】
【出願番号】特願2005−186079(P2005−186079)
【出願日】平成17年6月27日(2005.6.27)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成19年1月11日(2007.1.11)
【国際特許分類】
【出願日】平成17年6月27日(2005.6.27)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]