
地図情報生成システム
【課題】新規道路を高精度に検出することが可能な地図情報生成システムを提供する。
【解決手段】車両が新規走行路を走行した場合に、この走行路を走行した回数である走行数A、及びこの新規走行路を車両が走行したときにエンジンを停止した走行回数であるオフ回数Bを求める。そして、これらの比率であるエンジン停止比率「B/A」を算出し、このエンジン停止比率が下限閾値よりも低い場合には新規走行路は新規道路であると判定し、エンジン停止比率が上限閾値よりも高い場合には新規走行路は駐車場であるものと判定する。その結果、新規道路であるか駐車場であるかの判断をより正確に判別することができ、高精度な地図データの生成が可能となる。
【解決手段】車両が新規走行路を走行した場合に、この走行路を走行した回数である走行数A、及びこの新規走行路を車両が走行したときにエンジンを停止した走行回数であるオフ回数Bを求める。そして、これらの比率であるエンジン停止比率「B/A」を算出し、このエンジン停止比率が下限閾値よりも低い場合には新規走行路は新規道路であると判定し、エンジン停止比率が上限閾値よりも高い場合には新規走行路は駐車場であるものと判定する。その結果、新規道路であるか駐車場であるかの判断をより正確に判別することができ、高精度な地図データの生成が可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置等に用いられる地図情報に、新規な道路データを追加する地図情報生成システムに関する。
【背景技術】
【0002】
車両の走行軌跡に基づいて新規な地図情報を生成する地図情報生成システムとして、例えば、特開2008−164831号公報(特許文献1)に記載されたものが知られている。該特許文献1では、車両の走行軌跡データに基づき、車両が地図情報に存在しない新規の走行路を走行した場合に、この走行路を新規の道路として地図情報に追加する。また、新規に走行した走行路は常に新規道路であるとは限らず、駐車場を走行していることも考えられるので、このような場合には新規道路として採用しない。
【0003】
この際、新規の走行路が道路であるか、或いは駐車場であるかを判断するために、下記の4つの条件を用いている。即ち、下記(イ)〜(ニ)の条件を満たす走行路は、駐車場であるものと判断して、新規道路として採用しない。
【0004】
(イ)同一の道路リンクに戻ってくる走行軌跡
(ロ)エンジンが途中で停止している走行軌跡
(ハ)途中で車両が後退している走行軌跡
(ニ)一定距離以下(例えば10m)の走行
これにより、実際に車両が新規道路を走行していない走行軌跡データを除外することが可能となり、駐車場を走行した場合に、この走行データが誤って新規道路として登録されることを防止することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−164831号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した特許文献1に開示された従来例では、エンジンオフした走行軌跡データや一定距離以下の走行軌跡データを、駐車場と判定して一律に除外するため、出入り口が異なる大規模な駐車場に侵入し、その後駐車することなく、且つエンジンを停止することなくすり抜けた場合には、駐車場を走行した場合であっても、この走行路を道路として判断してしまう。また、一定距離以下の走行軌跡データは、新規道路の場合であっても、これを駐車場であるものと判断してしまう。更に、一時的に路上に駐車した場合であっても、これを駐車場であるものと判断してしまう。
【0007】
本発明は、このような従来の課題を解決するためになされたものであり、その目的とするところは、新規道路を高精度に検出することが可能な地図情報生成システムを提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本願発明は、車両の位置情報と車両の稼動情報とを含む車両の走行軌跡情報を収集する走行軌跡情報収集手段と、前記走行軌跡情報収集手段にて収集された走行軌跡情報を記憶する走行軌跡情報記憶手段と、地図情報を記憶する地図情報記憶手段と、前記走行軌跡情報記憶手段に記憶されている走行軌跡情報から、前記地図情報記憶手段に記憶されている地図情報に含まれない新規走行路の走行軌跡情報を抽出し、この新規走行路の走行数、及び、走行数に対する車両の非稼動比率に基づいて、新規走行路が新規道路であるか否かを判定する判定手段と、前記新規走行路が新規道路であると判定された場合に、前記地図情報記憶手段に記憶されている地図情報を変更する地図情報変更手段と、を備えたことを特徴とする。
【発明の効果】
【0009】
本発明では、車両が新規走行路を走行した際の走行軌跡データを抽出し、抽出された走行数に対する車両の非稼動比率に基づいてこの新規走行路が道路であるか、或いは駐車場であるかを判定するため、新規な道路と駐車場をより正確に判別することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態に係る地図情報生成システムの構成を示すブロック図である。
【図2】第1実施形態の地図情報生成システムに係り、新規に走行する走行路を新規の道路、または駐車場と判定する場合の例を示す説明図である。
【図3】従来装置において駐車場を走行した際に、これを新規の道路として誤判定する例を示す説明図である。
【図4】第2実施形態の地図情報生成システムに係り、車両の平均速度により新規な道路と判定される場合、及び駐車場と判定される場合の例を示す説明図である。
【図5】本発明の第1実施形態に係る地図情報生成システムの処理手順を示すフローチャートである。
【図6】本発明の第2実施形態に係る地図情報生成システムの処理手順を示すフローチャートである。
【図7】本発明の第2実施形態に係る地図情報生成システムで用いる、平均速度と下限閾値、上限閾値との関係を示す特性図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態を図面に基づいて説明する。
【0012】
[第1実施形態の説明]
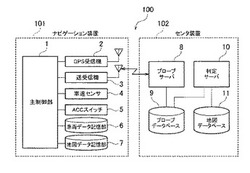
図1は、本発明の実施形態に係る地図情報生成システムの構成を示すブロック図である。図1に示すように、この地図情報生成システム100は、車両に搭載されるナビゲーション装置101と、センタ局に設置され、ナビゲーション装置101との間で通信によりデータの送受信が可能なセンタ装置102と、を備えている。
【0013】
ナビゲーション装置101は、主制御部1と、GPS(Global Positioning System)より送信される自車両の位置情報を受信するGPS受信機2と、例えば携帯電話機で構成されセンタ装置102に設けられるプローブサーバ8との間でデータの送受信を行う送受信機3と、自車両の走行速度を検出する車速センサ4と、イグニッションのオン、オフを切り替えるACCスイッチ5と、車両のID及び各種のデータを記憶する車両データ記憶部6と、ナビゲーションで用いる道路ネットワーク等を含む地図情報が記憶される地図データ記憶部7と、を備えている。
【0014】
主制御部1は、ナビゲーション装置101全体を総括的に制御するものであり、特に、GPS受信機2にて受信される自車両の位置情報、及び車速センサ4より取得される車速データに基づいて、自車両が地図データ記憶部7内に記憶されている地図中に存在する道路リンクにマッチングしているか否かを判定する。そして、自車両が道路リンクにマッチングしていない場所(これを「新規走行路」とする)を走行している場合には、この新規走行路内にて、ACCスイッチ5の操作状態に基づき、エンジン(電気自動車の場合はモータ)が停止した地図上の位置を検出する処理を行う。即ち、車両の稼動情報を取得する。更に、車速センサ4の出力信号に基づいて新規走行路を走行しているときの車速を取得する。そして、これらのデータを車両データ記憶部6に記憶する処理を行う。即ち、主制御部1は、車両の位置情報と車両の稼動情報とを含む車両の走行情報を収集する走行軌跡情報収集手段としての機能を備えている。
【0015】
送受信機3は、主制御部1で取得され、車両データ記憶部6に記憶された各種のデータを無線通信にてセンタ装置102に送信する。
【0016】
一方、センタ装置102は、プローブサーバ8と、プローブデータベース9と、判定サーバ(判定手段)10と、地図データベース11と、を備えている。
【0017】
プローブサーバ8は、ナビゲーション装置101より送信される各種のデータを受信する。主として、車両が新規走行路を走行した場合に、道路リンクから外れた位置の情報及び道路リンクに戻った位置の情報、新規走行路の走行時にエンジンが停止した場合に、この停止位置の情報、新規走行路を走行する際の車速の情報を受信する。そして、受信した各情報をプローブデータベース9に出力する。なお、図1では、説明を簡略化するために、プローブサーバ8と一つのナビゲーション装置101が通信で接続されている構成について示しているが、実際にはプローブサーバ8は複数の車両に搭載されるナビゲーション装置との間で通信が可能とされており、各ナビゲーション装置より送信される各種のデータを取得することができる。
【0018】
プローブデータベース9は、プローブサーバ8で受信された各種の情報を記憶する。即ち、プローブデータベース9は、主制御部(走行軌跡情報収集手段)1にて収集された走行軌跡情報を記憶する走行軌跡情報記憶手段としての機能を備えている。また、地図データベース(地図情報記憶手段)11は、その時点で認識されている道路情報を記憶している。
【0019】
判定サーバ10は、プローブデータベース9に記憶された各種のデータに基づいて、車両が新規走行路を走行した場合に、この新規走行路が新規の道路であるか否かを判定する処理(詳細は後述)を実行する。そして、新規の道路であると判定した場合には、この道路を地図データベース11に記憶されている地図データに、新規道路として登録する。即ち、判定サーバ10は、新規走行路が新規道路であると判定された場合に、地図データベース11に記憶されている地図情報を変更する地図情報変更手段としての機能を備えている。
【0020】
次に、車両が新規走行路を走行した際に、この新規走行路が新規の道路であるか、或いは駐車場であるかを判定サーバ10が判定する処理手順について、図5に示すフローチャートを参照して説明する。
【0021】
プローブサーバ8は、複数の車両に搭載されるナビゲーション装置より送信される新規走行路の走行データ、及びエンジン(イグニッション)の停止データ、及び車速データを取得し、これらの各データをプローブデータベース9に記憶する。判定サーバ10は、プローブデータベース9に記憶されている各データに基づき、以下の処理を実行する。
【0022】
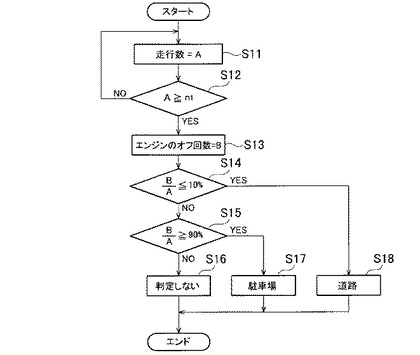
初めに、図5のステップS11において、判定サーバ10は、車両が新規走行路を走行した回数を取得し、この回数を走行数Aとして設定する。
【0023】
ステップS12において、判定サーバ10は、走行数Aが予め設定した規定数n1(例えば、n1=10)に達したか否かを判断する。そして、走行数Aが規定数n1に達していない場合には(ステップS12でNO)、ステップS11に処理を戻し、走行数Aが規定数n1に達している場合には(ステップS12でYES)、ステップS13に処理を進める。
【0024】
ステップS13において、判定サーバ10は、車両が道路マッチングしなくなった場所から道路マッチングした場所までの走行軌跡を1走行とした上で、その走行中に回数を問わずエンジン(電気自動車の場合はモータ)を停止した走行数をエンジン停止回数(オフ回数B)として設定する。
【0025】
ステップS14において、判定サーバ10は、走行数Aに対するオフ回数Bの比率、即ち、エンジン停止比率「B/A」(非稼動比率)を求め、このエンジン停止比率「B/A」が予め設定した下限閾値(判定閾値;この例では、10%とする)以下であるか否かを判定する。即ち、「B/A≦10%」であるか否かを判定する。そして、10%以下である場合には(ステップS14でYES)、ステップS18に処理を進め、10%を超える場合には(ステップS14でNO)、ステップS15に処理を進める。
【0026】
ステップS15において、判定サーバ10は、エンジン停止比率「B/A」が予め設定した上限閾値(この例では、90%とする)以上であるか否かを判定する。即ち、「B/A≧90%」であるか否かを判定する。そして、90%以上である場合には(ステップS15でYES)、ステップS17に処理を進め、90%未満である場合には(ステップS15でNO)、ステップS16に処理を進める。
【0027】
ステップS16において、判定サーバ10は、新規走行路についての判定を行わない。また、ステップS17において、判定サーバ10は、新規走行路は駐車場であるものと判定する。即ち、新規走行路を走行し、且つエンジンを停止させることが多い場合には、この走行路は駐車場である可能性が高いものと判断し、新規の道路としての登録を行わない。
【0028】
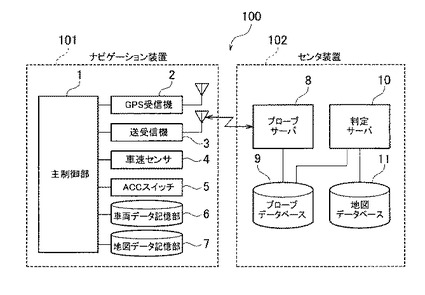
例えば、図2に示すように、既存道路N2に存在する交差点P3から、既存道路N1に存在する交差点P4に抜ける走行路L2を、車両が複数回走行する場合で、走行数が31回、エンジン停止回数が30回である場合には、停止比率は「30/31=97%≧90%」であるので、この走行路L2は駐車場Q1であるものと判断する。
【0029】
一方、ステップS18において、判定サーバ10は、この新規走行路は新規の道路であるものと判断する。即ち、新規の走行路を走行し、且つ、この走行路を走行中にエンジンを停止させることが少ない場合には、この走行路は駐車場ではなく、新規の道路である可能性が高いものと判断し、この道路を地図データベース11に記憶された地図データに登録する。
【0030】
例えば、図2に示すように、既存道路N2に存在する交差点P1から、既存道路N1に存在する交差点P2に抜ける走行路L1を、車両が複数回走行する場合で、走行数が33回、エンジン停止回数が2回である場合には、停止比率は「2/33=6%≦10%」であるので、この走行路L1は道路であるものと判断する。これにより、新規の道路が地図データベース11に新たに追加されることになり、日々変化する道路情報を、いち早く取り入れた地図データを生成することが可能となる。
【0031】
このようにして、本実施形態に係る地図情報生成システム100では、車両がナビゲーション装置の地図データに存在しない新規の走行路を走行した場合に、この走行路を走行した走行数、及びこの走行路を走行した際のエンジンの停止回数に基づいて、この走行路が道路であるか、或いは駐車場であるかを判断するので、新規な道路の判定を高精度に行うことができる。
【0032】
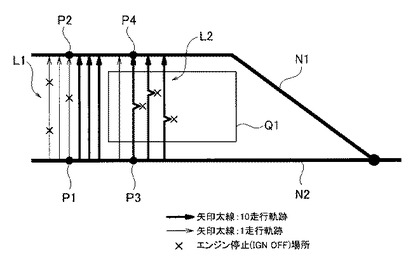
即ち、図3は、従来の方式を用いて新規走行路が新規の道路であるか、或いは駐車場であるかを判断する例を示す説明図であり、走行路L15に示すように、同一のノードに戻る場合、走行路L16に示すように、バック走行を含む場合、走行路L17に示すようにエンジンの停止を含む場合には、この走行路を駐車場Q4であるものと正しく判断する。しかし、例えば走行路L14のように、入口と出口が異なる駐車場を単に通り抜けた場合には、この走行路を新規の道路として判断してしまう。更に、走行路L18に示すように極めて短い走行路を走行した場合には、この走行路を駐車場であるものと判断してしまい、判断の精度が低くなる。しかし、本実施形態に係る地図情報生成システム100では、エンジン停止比率「B/A」と上限閾値、及び下限閾値との比較により、新規走行路が駐車場であるか道路であるかを判定するので、従来のような誤判定を防止でき、新規の道路と駐車場をより正確に判別することが可能となる。
【0033】
なお、上記した実施形態では、図5のステップS14,S15に示したように、エンジン停止比率「B/A」に上限値(例えば、90%)、及び下限値(例えば、10%)を設定し、これらに基づいて「駐車場」、「道路」、「判定せず」、を決定したが、閾値を一つ設定し(例えば、50%とする)、「B/A」がこの閾値よりも大きい場合には駐車場であると判定し、小さい場合には道路であると判定するようにしても良い。
【0034】
また、本実施形態では、非稼動比率として車両のエンジン停止比率を例に挙げて説明したが、電気自動車の場合は、モータの停止比率を用いれば良い。
【0035】
[第2実施形態の説明]
次に、第2実施形態について説明する。上述した第1実施形態では、新規走行路の走行数A、及びエンジンの停止回数(オフ回数B)に基づいて、この走行路が道路であるか、或いは駐車場であるかを判断する例について説明したが、第2実施形態では、走行数A、及びオフ回数Bに加えて、車速のデータを考慮して、走行路が道路であるか、或いは駐車場であるかを判断する。システムの構成は、図1と同様であるので構成説明を省略する。
【0036】
以下、図6に示すフローチャートを参照して、第2実施形態に係る地図情報生成システムの判定サーバ10による処理手順について説明する。
【0037】
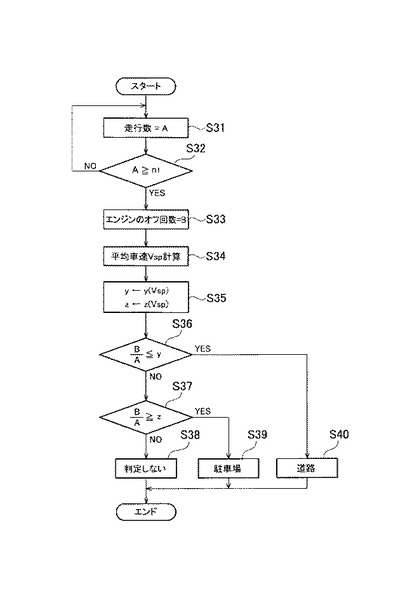
初めに、ステップS31において、判定サーバ10は、車両が新規走行路を走行した回数を取得し、この回数を走行数Aとして設定する。ステップS32において、判定サーバ10は、走行数Aが予め設定した規定数n1に達したか否かを判断する。そして、走行数Aが規定数n1に達していない場合には(ステップS32でNO)、ステップS31に処理を戻し、走行数Aが規定数n1に達している場合には(ステップS32でYES)、ステップS33に処理を進める。
【0038】
ステップS33において、判定サーバ10は、車両が道路マッチングしなくなった場所から道路マッチングした場所までの走行軌跡を1走行とした上で、その走行中に回数を問わずエンジン(電気自動車の場合はモータ)を停止した走行数をエンジン停止回数(オフ回数B)として設定する。
【0039】
ステップS34において、判定サーバ10は、新規走行路を車両が走行したときの車速の平均速度を算出し、これを平均速度Vspとする。
【0040】
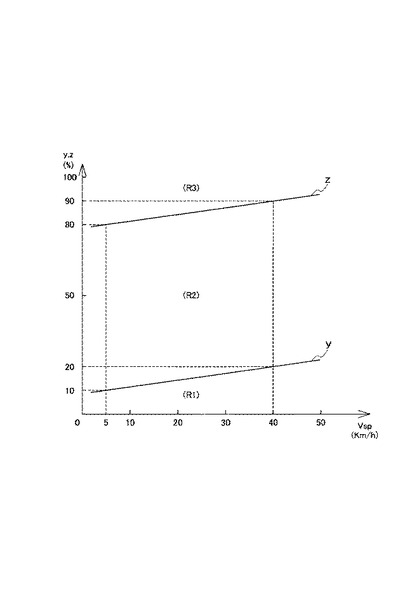
ステップS35において、判定サーバ10は、予め設定されたマップを参照して、平均速度Vspに対する下限閾値y(第1判定閾値)、及び上限閾値z(第2判定閾値)を設定する。以下、下限閾値y、及び上限閾値zの設定方法について図7に示す特性図を参照して説明する。
【0041】
判定サーバ10は、平均速度Vspに対する下限閾値y、及び上限閾値zの対応マップを記憶しており、図7に示すように下限閾値y、及び上限閾値zは共に平均速度Vspの増加に対して単調増加の特性を有している。そして、平均速度Vspが5[Km/h]の場合には、下限閾値yは10%、上限閾値zは80%に設定される。また、平均速度Vspが40[Km/h]の場合には、下限閾値yは20%、上限閾値zは90%に設定される。なお、図7は、上限閾値z、下限閾値yの一例を示しており、本実施形態はこのマップに限定されるものではない。
【0042】
ステップS36において、判定サーバ10は、走行数Aに対するオフ回数Bの比率、即ち、エンジン停止比率「B/A」を求め、このエンジン停止比率「B/A」が上記の下限閾値y以下であるか否かを判定する。即ち、「B/A≦y」であるか否かを判定する。そして、下限閾値y以下である場合には(ステップS36でYES)、ステップS40に処理を進め、そうでない場合には(ステップS36でNO)ステップS37に処理を進める。
【0043】
ステップS37において、判定サーバ10は、エンジン停止比率「B/A」が上記の上限閾値z以上であるか否かを判定する。即ち、「B/A≧z」であるか否かを判定する。そして、上限閾値z以上である場合には(ステップS37でYES)、ステップS39に処理を進め、そうでない場合には(ステップS37でNO)ステップS38に処理を進める。
【0044】
ステップS38において、判定サーバ10は、新規走行路についての判定を行わない。即ち、エンジン停止比率「B/A」が図7に示す領域R2内となる場合には、データに曖昧さが含まれるので、新規走行路が道路であるか駐車場であるかの判定を行わない。
【0045】
また、ステップS39において、判定サーバ10は、新規走行路は駐車場であるものと判定する。即ち、エンジン停止比率「B/A」が領域R3内となる場合には、この新規走行路は駐車場であるものと判定する。ステップS40において、判定サーバ10は、新規走行路は道路であるものと判定する。即ち、エンジン停止比率「B/A」が領域R1内となる場合には、この新規走行路は道路であるものと判定する。
【0046】
上記のように、本実施形態では、新規走行路の走行数Aが規定数n1回に達しており、更に、エンジン停止比率「B/A」と閾値との比較を行う際に、車両の平均速度Vspに応じて、下限閾値y、及び上限閾値zを変更している。具体的には、図7に示したように、平均速度Vspが大きい場合(速度が速い場合)には、下限閾値y、及び上限閾値zが共に大きい数値に設定されるので、駐車場と判断される確率が低くなり、反対に道路であると判定される確率が高くなる。
【0047】
つまり、車速が早い場合には、車両が意識的に通り抜けている可能性が高いので、駐車場である確率は低く、これを反映するために上限閾値z、及び下限閾値yを共に大きく設定している。これとは反対に、車速が遅い場合には、車両が駐車スペースを探すために走行している可能性が高いので、駐車場である確率が高く、これを反映するために上限閾値z、及び下限閾値yを小さく設定している。このため、より高精度に、新規走行路が道路であるか、或いは駐車場であるかを判定することが可能となる。
【0048】
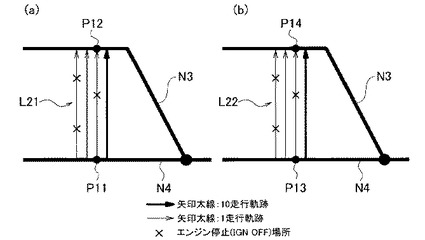
以下、これを図4に示す具体例を参照して説明する。図4(a)に示すように、既存道路N4の交差点P11にて車両が道路マッチングしなくなり(既存道路N4から外れてしまい)、その後、既存道路N3の交差点P12で道路マッチングした場合には、この車両は新規走行路L21を走行したものと考えられる。そして、この走行数が13回であり、エンジンが停止した回数が2回である場合には、エンジン停止比率は「2/13=15%」とされる。この際、車両の平均速度が5[Km/h]であった場合には、下限閾値yは10%に設定され、上限閾値zは80%に設定されるので(図7参照)、上記のエンジン停止比率15%の場合は、図7の領域R2に属することになり、道路或いは駐車場の判定処理が行われない。
【0049】
他方、図4(b)に示すように、既存道路N4の交差点P13にて道路マッチングしなくなり、その後、既存道路N3の交差点P14で道路マッチングした場合には、この車両は新規走行路L22を走行したものと考えられる。そして、この走行数が13回であり、このうちエンジンが停止した回数が2回である場合には、エンジン停止比率は「2/13=15%」とされる。この際、車両の平均速度が40[Km/h]である場合には、下限閾値yは20%に設定されるので、上記のエンジン停止比率15%の場合は、図7の領域R1に属することになり、新規走行路は道路であるものと判定する。
【0050】
即ち、走行数A、及びエンジン停止回数(オフ回数B)が同一であっても、車速が速い場合の方が道路として判断される確率が高くなるように設定され、判断の精度が向上することになる。
【0051】
このようにして、第2実施形態に係る地図情報生成システム100では、車両の走行数、及びエンジン停止比率に加え、車両の平均速度Vspを用いて車両が新規に走行した新規走行路が道路であるか、或いは駐車場であるかを判定するので、より高精度な判定が可能であり、精度の高い地図情報を追加して登録することが可能となる。
【0052】
以上、本発明の地図情報生成システムを図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置き換えることができる。
【0053】
例えば、上述した実施形態では、車両が道路リンクから外れたか否かの判定をナビゲーション装置101側で行う場合を例に挙げて説明したが、本発明はこれに限定されるものではなく、センタ装置102側で行うようにしても良い。
【0054】
また、上述した実施形態では、車両が道路マッチングしなくなった場所から道路マッチングした場所までの走行軌跡を1走行とした上で、その走行中に回数を問わずエンジン(電気自動車の場合はモータ)を停止した走行数をエンジン停止回数(オフ回数B)として設定したが、1走行中に複数回エンジンを停止した場合に、その複数回分エンジンを停止したとしてエンジン停止回数(オフ回数B)を設定しても良い。
【産業上の利用可能性】
【0055】
本発明は、ナビゲーション装置等に用いる地図データを新規なものに更新することに利用することができる。
【符号の説明】
【0056】
1 主制御部
2 GPS受信機
3 送受信機
4 車速センサ
5 ACCスイッチ
6 車両データ記憶部
7 地図データ記憶部
8 プローブサーバ
9 プローブデータベース
10 判定サーバ
11 地図データベース
100 地図情報生成システム
101 ナビゲーション装置
102 センタ装置
【技術分野】
【0001】
本発明は、ナビゲーション装置等に用いられる地図情報に、新規な道路データを追加する地図情報生成システムに関する。
【背景技術】
【0002】
車両の走行軌跡に基づいて新規な地図情報を生成する地図情報生成システムとして、例えば、特開2008−164831号公報(特許文献1)に記載されたものが知られている。該特許文献1では、車両の走行軌跡データに基づき、車両が地図情報に存在しない新規の走行路を走行した場合に、この走行路を新規の道路として地図情報に追加する。また、新規に走行した走行路は常に新規道路であるとは限らず、駐車場を走行していることも考えられるので、このような場合には新規道路として採用しない。
【0003】
この際、新規の走行路が道路であるか、或いは駐車場であるかを判断するために、下記の4つの条件を用いている。即ち、下記(イ)〜(ニ)の条件を満たす走行路は、駐車場であるものと判断して、新規道路として採用しない。
【0004】
(イ)同一の道路リンクに戻ってくる走行軌跡
(ロ)エンジンが途中で停止している走行軌跡
(ハ)途中で車両が後退している走行軌跡
(ニ)一定距離以下(例えば10m)の走行
これにより、実際に車両が新規道路を走行していない走行軌跡データを除外することが可能となり、駐車場を走行した場合に、この走行データが誤って新規道路として登録されることを防止することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−164831号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した特許文献1に開示された従来例では、エンジンオフした走行軌跡データや一定距離以下の走行軌跡データを、駐車場と判定して一律に除外するため、出入り口が異なる大規模な駐車場に侵入し、その後駐車することなく、且つエンジンを停止することなくすり抜けた場合には、駐車場を走行した場合であっても、この走行路を道路として判断してしまう。また、一定距離以下の走行軌跡データは、新規道路の場合であっても、これを駐車場であるものと判断してしまう。更に、一時的に路上に駐車した場合であっても、これを駐車場であるものと判断してしまう。
【0007】
本発明は、このような従来の課題を解決するためになされたものであり、その目的とするところは、新規道路を高精度に検出することが可能な地図情報生成システムを提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本願発明は、車両の位置情報と車両の稼動情報とを含む車両の走行軌跡情報を収集する走行軌跡情報収集手段と、前記走行軌跡情報収集手段にて収集された走行軌跡情報を記憶する走行軌跡情報記憶手段と、地図情報を記憶する地図情報記憶手段と、前記走行軌跡情報記憶手段に記憶されている走行軌跡情報から、前記地図情報記憶手段に記憶されている地図情報に含まれない新規走行路の走行軌跡情報を抽出し、この新規走行路の走行数、及び、走行数に対する車両の非稼動比率に基づいて、新規走行路が新規道路であるか否かを判定する判定手段と、前記新規走行路が新規道路であると判定された場合に、前記地図情報記憶手段に記憶されている地図情報を変更する地図情報変更手段と、を備えたことを特徴とする。
【発明の効果】
【0009】
本発明では、車両が新規走行路を走行した際の走行軌跡データを抽出し、抽出された走行数に対する車両の非稼動比率に基づいてこの新規走行路が道路であるか、或いは駐車場であるかを判定するため、新規な道路と駐車場をより正確に判別することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態に係る地図情報生成システムの構成を示すブロック図である。
【図2】第1実施形態の地図情報生成システムに係り、新規に走行する走行路を新規の道路、または駐車場と判定する場合の例を示す説明図である。
【図3】従来装置において駐車場を走行した際に、これを新規の道路として誤判定する例を示す説明図である。
【図4】第2実施形態の地図情報生成システムに係り、車両の平均速度により新規な道路と判定される場合、及び駐車場と判定される場合の例を示す説明図である。
【図5】本発明の第1実施形態に係る地図情報生成システムの処理手順を示すフローチャートである。
【図6】本発明の第2実施形態に係る地図情報生成システムの処理手順を示すフローチャートである。
【図7】本発明の第2実施形態に係る地図情報生成システムで用いる、平均速度と下限閾値、上限閾値との関係を示す特性図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態を図面に基づいて説明する。
【0012】
[第1実施形態の説明]
図1は、本発明の実施形態に係る地図情報生成システムの構成を示すブロック図である。図1に示すように、この地図情報生成システム100は、車両に搭載されるナビゲーション装置101と、センタ局に設置され、ナビゲーション装置101との間で通信によりデータの送受信が可能なセンタ装置102と、を備えている。
【0013】
ナビゲーション装置101は、主制御部1と、GPS(Global Positioning System)より送信される自車両の位置情報を受信するGPS受信機2と、例えば携帯電話機で構成されセンタ装置102に設けられるプローブサーバ8との間でデータの送受信を行う送受信機3と、自車両の走行速度を検出する車速センサ4と、イグニッションのオン、オフを切り替えるACCスイッチ5と、車両のID及び各種のデータを記憶する車両データ記憶部6と、ナビゲーションで用いる道路ネットワーク等を含む地図情報が記憶される地図データ記憶部7と、を備えている。
【0014】
主制御部1は、ナビゲーション装置101全体を総括的に制御するものであり、特に、GPS受信機2にて受信される自車両の位置情報、及び車速センサ4より取得される車速データに基づいて、自車両が地図データ記憶部7内に記憶されている地図中に存在する道路リンクにマッチングしているか否かを判定する。そして、自車両が道路リンクにマッチングしていない場所(これを「新規走行路」とする)を走行している場合には、この新規走行路内にて、ACCスイッチ5の操作状態に基づき、エンジン(電気自動車の場合はモータ)が停止した地図上の位置を検出する処理を行う。即ち、車両の稼動情報を取得する。更に、車速センサ4の出力信号に基づいて新規走行路を走行しているときの車速を取得する。そして、これらのデータを車両データ記憶部6に記憶する処理を行う。即ち、主制御部1は、車両の位置情報と車両の稼動情報とを含む車両の走行情報を収集する走行軌跡情報収集手段としての機能を備えている。
【0015】
送受信機3は、主制御部1で取得され、車両データ記憶部6に記憶された各種のデータを無線通信にてセンタ装置102に送信する。
【0016】
一方、センタ装置102は、プローブサーバ8と、プローブデータベース9と、判定サーバ(判定手段)10と、地図データベース11と、を備えている。
【0017】
プローブサーバ8は、ナビゲーション装置101より送信される各種のデータを受信する。主として、車両が新規走行路を走行した場合に、道路リンクから外れた位置の情報及び道路リンクに戻った位置の情報、新規走行路の走行時にエンジンが停止した場合に、この停止位置の情報、新規走行路を走行する際の車速の情報を受信する。そして、受信した各情報をプローブデータベース9に出力する。なお、図1では、説明を簡略化するために、プローブサーバ8と一つのナビゲーション装置101が通信で接続されている構成について示しているが、実際にはプローブサーバ8は複数の車両に搭載されるナビゲーション装置との間で通信が可能とされており、各ナビゲーション装置より送信される各種のデータを取得することができる。
【0018】
プローブデータベース9は、プローブサーバ8で受信された各種の情報を記憶する。即ち、プローブデータベース9は、主制御部(走行軌跡情報収集手段)1にて収集された走行軌跡情報を記憶する走行軌跡情報記憶手段としての機能を備えている。また、地図データベース(地図情報記憶手段)11は、その時点で認識されている道路情報を記憶している。
【0019】
判定サーバ10は、プローブデータベース9に記憶された各種のデータに基づいて、車両が新規走行路を走行した場合に、この新規走行路が新規の道路であるか否かを判定する処理(詳細は後述)を実行する。そして、新規の道路であると判定した場合には、この道路を地図データベース11に記憶されている地図データに、新規道路として登録する。即ち、判定サーバ10は、新規走行路が新規道路であると判定された場合に、地図データベース11に記憶されている地図情報を変更する地図情報変更手段としての機能を備えている。
【0020】
次に、車両が新規走行路を走行した際に、この新規走行路が新規の道路であるか、或いは駐車場であるかを判定サーバ10が判定する処理手順について、図5に示すフローチャートを参照して説明する。
【0021】
プローブサーバ8は、複数の車両に搭載されるナビゲーション装置より送信される新規走行路の走行データ、及びエンジン(イグニッション)の停止データ、及び車速データを取得し、これらの各データをプローブデータベース9に記憶する。判定サーバ10は、プローブデータベース9に記憶されている各データに基づき、以下の処理を実行する。
【0022】
初めに、図5のステップS11において、判定サーバ10は、車両が新規走行路を走行した回数を取得し、この回数を走行数Aとして設定する。
【0023】
ステップS12において、判定サーバ10は、走行数Aが予め設定した規定数n1(例えば、n1=10)に達したか否かを判断する。そして、走行数Aが規定数n1に達していない場合には(ステップS12でNO)、ステップS11に処理を戻し、走行数Aが規定数n1に達している場合には(ステップS12でYES)、ステップS13に処理を進める。
【0024】
ステップS13において、判定サーバ10は、車両が道路マッチングしなくなった場所から道路マッチングした場所までの走行軌跡を1走行とした上で、その走行中に回数を問わずエンジン(電気自動車の場合はモータ)を停止した走行数をエンジン停止回数(オフ回数B)として設定する。
【0025】
ステップS14において、判定サーバ10は、走行数Aに対するオフ回数Bの比率、即ち、エンジン停止比率「B/A」(非稼動比率)を求め、このエンジン停止比率「B/A」が予め設定した下限閾値(判定閾値;この例では、10%とする)以下であるか否かを判定する。即ち、「B/A≦10%」であるか否かを判定する。そして、10%以下である場合には(ステップS14でYES)、ステップS18に処理を進め、10%を超える場合には(ステップS14でNO)、ステップS15に処理を進める。
【0026】
ステップS15において、判定サーバ10は、エンジン停止比率「B/A」が予め設定した上限閾値(この例では、90%とする)以上であるか否かを判定する。即ち、「B/A≧90%」であるか否かを判定する。そして、90%以上である場合には(ステップS15でYES)、ステップS17に処理を進め、90%未満である場合には(ステップS15でNO)、ステップS16に処理を進める。
【0027】
ステップS16において、判定サーバ10は、新規走行路についての判定を行わない。また、ステップS17において、判定サーバ10は、新規走行路は駐車場であるものと判定する。即ち、新規走行路を走行し、且つエンジンを停止させることが多い場合には、この走行路は駐車場である可能性が高いものと判断し、新規の道路としての登録を行わない。
【0028】
例えば、図2に示すように、既存道路N2に存在する交差点P3から、既存道路N1に存在する交差点P4に抜ける走行路L2を、車両が複数回走行する場合で、走行数が31回、エンジン停止回数が30回である場合には、停止比率は「30/31=97%≧90%」であるので、この走行路L2は駐車場Q1であるものと判断する。
【0029】
一方、ステップS18において、判定サーバ10は、この新規走行路は新規の道路であるものと判断する。即ち、新規の走行路を走行し、且つ、この走行路を走行中にエンジンを停止させることが少ない場合には、この走行路は駐車場ではなく、新規の道路である可能性が高いものと判断し、この道路を地図データベース11に記憶された地図データに登録する。
【0030】
例えば、図2に示すように、既存道路N2に存在する交差点P1から、既存道路N1に存在する交差点P2に抜ける走行路L1を、車両が複数回走行する場合で、走行数が33回、エンジン停止回数が2回である場合には、停止比率は「2/33=6%≦10%」であるので、この走行路L1は道路であるものと判断する。これにより、新規の道路が地図データベース11に新たに追加されることになり、日々変化する道路情報を、いち早く取り入れた地図データを生成することが可能となる。
【0031】
このようにして、本実施形態に係る地図情報生成システム100では、車両がナビゲーション装置の地図データに存在しない新規の走行路を走行した場合に、この走行路を走行した走行数、及びこの走行路を走行した際のエンジンの停止回数に基づいて、この走行路が道路であるか、或いは駐車場であるかを判断するので、新規な道路の判定を高精度に行うことができる。
【0032】
即ち、図3は、従来の方式を用いて新規走行路が新規の道路であるか、或いは駐車場であるかを判断する例を示す説明図であり、走行路L15に示すように、同一のノードに戻る場合、走行路L16に示すように、バック走行を含む場合、走行路L17に示すようにエンジンの停止を含む場合には、この走行路を駐車場Q4であるものと正しく判断する。しかし、例えば走行路L14のように、入口と出口が異なる駐車場を単に通り抜けた場合には、この走行路を新規の道路として判断してしまう。更に、走行路L18に示すように極めて短い走行路を走行した場合には、この走行路を駐車場であるものと判断してしまい、判断の精度が低くなる。しかし、本実施形態に係る地図情報生成システム100では、エンジン停止比率「B/A」と上限閾値、及び下限閾値との比較により、新規走行路が駐車場であるか道路であるかを判定するので、従来のような誤判定を防止でき、新規の道路と駐車場をより正確に判別することが可能となる。
【0033】
なお、上記した実施形態では、図5のステップS14,S15に示したように、エンジン停止比率「B/A」に上限値(例えば、90%)、及び下限値(例えば、10%)を設定し、これらに基づいて「駐車場」、「道路」、「判定せず」、を決定したが、閾値を一つ設定し(例えば、50%とする)、「B/A」がこの閾値よりも大きい場合には駐車場であると判定し、小さい場合には道路であると判定するようにしても良い。
【0034】
また、本実施形態では、非稼動比率として車両のエンジン停止比率を例に挙げて説明したが、電気自動車の場合は、モータの停止比率を用いれば良い。
【0035】
[第2実施形態の説明]
次に、第2実施形態について説明する。上述した第1実施形態では、新規走行路の走行数A、及びエンジンの停止回数(オフ回数B)に基づいて、この走行路が道路であるか、或いは駐車場であるかを判断する例について説明したが、第2実施形態では、走行数A、及びオフ回数Bに加えて、車速のデータを考慮して、走行路が道路であるか、或いは駐車場であるかを判断する。システムの構成は、図1と同様であるので構成説明を省略する。
【0036】
以下、図6に示すフローチャートを参照して、第2実施形態に係る地図情報生成システムの判定サーバ10による処理手順について説明する。
【0037】
初めに、ステップS31において、判定サーバ10は、車両が新規走行路を走行した回数を取得し、この回数を走行数Aとして設定する。ステップS32において、判定サーバ10は、走行数Aが予め設定した規定数n1に達したか否かを判断する。そして、走行数Aが規定数n1に達していない場合には(ステップS32でNO)、ステップS31に処理を戻し、走行数Aが規定数n1に達している場合には(ステップS32でYES)、ステップS33に処理を進める。
【0038】
ステップS33において、判定サーバ10は、車両が道路マッチングしなくなった場所から道路マッチングした場所までの走行軌跡を1走行とした上で、その走行中に回数を問わずエンジン(電気自動車の場合はモータ)を停止した走行数をエンジン停止回数(オフ回数B)として設定する。
【0039】
ステップS34において、判定サーバ10は、新規走行路を車両が走行したときの車速の平均速度を算出し、これを平均速度Vspとする。
【0040】
ステップS35において、判定サーバ10は、予め設定されたマップを参照して、平均速度Vspに対する下限閾値y(第1判定閾値)、及び上限閾値z(第2判定閾値)を設定する。以下、下限閾値y、及び上限閾値zの設定方法について図7に示す特性図を参照して説明する。
【0041】
判定サーバ10は、平均速度Vspに対する下限閾値y、及び上限閾値zの対応マップを記憶しており、図7に示すように下限閾値y、及び上限閾値zは共に平均速度Vspの増加に対して単調増加の特性を有している。そして、平均速度Vspが5[Km/h]の場合には、下限閾値yは10%、上限閾値zは80%に設定される。また、平均速度Vspが40[Km/h]の場合には、下限閾値yは20%、上限閾値zは90%に設定される。なお、図7は、上限閾値z、下限閾値yの一例を示しており、本実施形態はこのマップに限定されるものではない。
【0042】
ステップS36において、判定サーバ10は、走行数Aに対するオフ回数Bの比率、即ち、エンジン停止比率「B/A」を求め、このエンジン停止比率「B/A」が上記の下限閾値y以下であるか否かを判定する。即ち、「B/A≦y」であるか否かを判定する。そして、下限閾値y以下である場合には(ステップS36でYES)、ステップS40に処理を進め、そうでない場合には(ステップS36でNO)ステップS37に処理を進める。
【0043】
ステップS37において、判定サーバ10は、エンジン停止比率「B/A」が上記の上限閾値z以上であるか否かを判定する。即ち、「B/A≧z」であるか否かを判定する。そして、上限閾値z以上である場合には(ステップS37でYES)、ステップS39に処理を進め、そうでない場合には(ステップS37でNO)ステップS38に処理を進める。
【0044】
ステップS38において、判定サーバ10は、新規走行路についての判定を行わない。即ち、エンジン停止比率「B/A」が図7に示す領域R2内となる場合には、データに曖昧さが含まれるので、新規走行路が道路であるか駐車場であるかの判定を行わない。
【0045】
また、ステップS39において、判定サーバ10は、新規走行路は駐車場であるものと判定する。即ち、エンジン停止比率「B/A」が領域R3内となる場合には、この新規走行路は駐車場であるものと判定する。ステップS40において、判定サーバ10は、新規走行路は道路であるものと判定する。即ち、エンジン停止比率「B/A」が領域R1内となる場合には、この新規走行路は道路であるものと判定する。
【0046】
上記のように、本実施形態では、新規走行路の走行数Aが規定数n1回に達しており、更に、エンジン停止比率「B/A」と閾値との比較を行う際に、車両の平均速度Vspに応じて、下限閾値y、及び上限閾値zを変更している。具体的には、図7に示したように、平均速度Vspが大きい場合(速度が速い場合)には、下限閾値y、及び上限閾値zが共に大きい数値に設定されるので、駐車場と判断される確率が低くなり、反対に道路であると判定される確率が高くなる。
【0047】
つまり、車速が早い場合には、車両が意識的に通り抜けている可能性が高いので、駐車場である確率は低く、これを反映するために上限閾値z、及び下限閾値yを共に大きく設定している。これとは反対に、車速が遅い場合には、車両が駐車スペースを探すために走行している可能性が高いので、駐車場である確率が高く、これを反映するために上限閾値z、及び下限閾値yを小さく設定している。このため、より高精度に、新規走行路が道路であるか、或いは駐車場であるかを判定することが可能となる。
【0048】
以下、これを図4に示す具体例を参照して説明する。図4(a)に示すように、既存道路N4の交差点P11にて車両が道路マッチングしなくなり(既存道路N4から外れてしまい)、その後、既存道路N3の交差点P12で道路マッチングした場合には、この車両は新規走行路L21を走行したものと考えられる。そして、この走行数が13回であり、エンジンが停止した回数が2回である場合には、エンジン停止比率は「2/13=15%」とされる。この際、車両の平均速度が5[Km/h]であった場合には、下限閾値yは10%に設定され、上限閾値zは80%に設定されるので(図7参照)、上記のエンジン停止比率15%の場合は、図7の領域R2に属することになり、道路或いは駐車場の判定処理が行われない。
【0049】
他方、図4(b)に示すように、既存道路N4の交差点P13にて道路マッチングしなくなり、その後、既存道路N3の交差点P14で道路マッチングした場合には、この車両は新規走行路L22を走行したものと考えられる。そして、この走行数が13回であり、このうちエンジンが停止した回数が2回である場合には、エンジン停止比率は「2/13=15%」とされる。この際、車両の平均速度が40[Km/h]である場合には、下限閾値yは20%に設定されるので、上記のエンジン停止比率15%の場合は、図7の領域R1に属することになり、新規走行路は道路であるものと判定する。
【0050】
即ち、走行数A、及びエンジン停止回数(オフ回数B)が同一であっても、車速が速い場合の方が道路として判断される確率が高くなるように設定され、判断の精度が向上することになる。
【0051】
このようにして、第2実施形態に係る地図情報生成システム100では、車両の走行数、及びエンジン停止比率に加え、車両の平均速度Vspを用いて車両が新規に走行した新規走行路が道路であるか、或いは駐車場であるかを判定するので、より高精度な判定が可能であり、精度の高い地図情報を追加して登録することが可能となる。
【0052】
以上、本発明の地図情報生成システムを図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置き換えることができる。
【0053】
例えば、上述した実施形態では、車両が道路リンクから外れたか否かの判定をナビゲーション装置101側で行う場合を例に挙げて説明したが、本発明はこれに限定されるものではなく、センタ装置102側で行うようにしても良い。
【0054】
また、上述した実施形態では、車両が道路マッチングしなくなった場所から道路マッチングした場所までの走行軌跡を1走行とした上で、その走行中に回数を問わずエンジン(電気自動車の場合はモータ)を停止した走行数をエンジン停止回数(オフ回数B)として設定したが、1走行中に複数回エンジンを停止した場合に、その複数回分エンジンを停止したとしてエンジン停止回数(オフ回数B)を設定しても良い。
【産業上の利用可能性】
【0055】
本発明は、ナビゲーション装置等に用いる地図データを新規なものに更新することに利用することができる。
【符号の説明】
【0056】
1 主制御部
2 GPS受信機
3 送受信機
4 車速センサ
5 ACCスイッチ
6 車両データ記憶部
7 地図データ記憶部
8 プローブサーバ
9 プローブデータベース
10 判定サーバ
11 地図データベース
100 地図情報生成システム
101 ナビゲーション装置
102 センタ装置
【特許請求の範囲】
【請求項1】
車両の位置情報と車両の稼動情報とを含む車両の走行軌跡情報を収集する走行軌跡情報収集手段と、
前記走行軌跡情報収集手段にて収集された走行軌跡情報を記憶する走行軌跡情報記憶手段と、
地図情報を記憶する地図情報記憶手段と、
前記走行軌跡情報記憶手段に記憶されている走行軌跡情報から、前記地図情報記憶手段に記憶されている地図情報に含まれない新規走行路の走行軌跡情報を抽出し、この新規走行路の走行数、及び、走行数に対する車両の非稼動比率に基づいて、新規走行路が新規道路であるか否かを判定する判定手段と、
前記新規走行路が新規道路であると判定された場合に、前記地図情報記憶手段に記憶されている地図情報を変更する地図情報変更手段と、
を備えたことを特徴とする地図情報生成システム。
【請求項2】
前記判定手段は、前記走行数に対する車両の非稼動比率が、予め設定した第1判定閾値以下である場合には、新規走行路は道路であると判定し、前記第1判定閾値よりも大きい第2判定閾値以上である場合には、駐車場であると判定することを特徴とする請求項1に記載の地図情報生成システム。
【請求項3】
前記走行軌跡情報収集手段は、車両の稼動情報として車速を収集し、
前記判定手段は、前記走行軌跡情報記憶手段に記憶された走行軌跡情報から、新規走行路を走行しているときの平均車速を算出し、前記平均車速が大きいほど、前記第1判定閾値、及び第2判定閾値を大きい数値に設定することを特徴とする請求項2に記載の地図情報生成システム。
【請求項1】
車両の位置情報と車両の稼動情報とを含む車両の走行軌跡情報を収集する走行軌跡情報収集手段と、
前記走行軌跡情報収集手段にて収集された走行軌跡情報を記憶する走行軌跡情報記憶手段と、
地図情報を記憶する地図情報記憶手段と、
前記走行軌跡情報記憶手段に記憶されている走行軌跡情報から、前記地図情報記憶手段に記憶されている地図情報に含まれない新規走行路の走行軌跡情報を抽出し、この新規走行路の走行数、及び、走行数に対する車両の非稼動比率に基づいて、新規走行路が新規道路であるか否かを判定する判定手段と、
前記新規走行路が新規道路であると判定された場合に、前記地図情報記憶手段に記憶されている地図情報を変更する地図情報変更手段と、
を備えたことを特徴とする地図情報生成システム。
【請求項2】
前記判定手段は、前記走行数に対する車両の非稼動比率が、予め設定した第1判定閾値以下である場合には、新規走行路は道路であると判定し、前記第1判定閾値よりも大きい第2判定閾値以上である場合には、駐車場であると判定することを特徴とする請求項1に記載の地図情報生成システム。
【請求項3】
前記走行軌跡情報収集手段は、車両の稼動情報として車速を収集し、
前記判定手段は、前記走行軌跡情報記憶手段に記憶された走行軌跡情報から、新規走行路を走行しているときの平均車速を算出し、前記平均車速が大きいほど、前記第1判定閾値、及び第2判定閾値を大きい数値に設定することを特徴とする請求項2に記載の地図情報生成システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−20036(P2013−20036A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−152535(P2011−152535)
【出願日】平成23年7月11日(2011.7.11)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月11日(2011.7.11)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]