
地図更新システム
【課題】新規道路か否かを正しく判定する。
【解決手段】地図を記憶する地図記憶手段と、測位信号電波を受信し、測位信号に基づいて移動体の地図上の位置を検出する第1の位置検出手段21,24,28,29と、移動体の挙動を検出し、挙動に基づいて移動体の地図上の位置を検出する第2の位置検出手段21,28,31と、測位信号電波の受信可否を検出する受信可否検出手段23と、第1または第2の位置検出手段により検出された地図上の位置と測位信号電波の受信可否とに基づいて、移動体が移動している道路が地図記憶手段28に記憶されていない新規道路か否かを判定する新規道路判定手段21とを備える。
【解決手段】地図を記憶する地図記憶手段と、測位信号電波を受信し、測位信号に基づいて移動体の地図上の位置を検出する第1の位置検出手段21,24,28,29と、移動体の挙動を検出し、挙動に基づいて移動体の地図上の位置を検出する第2の位置検出手段21,28,31と、測位信号電波の受信可否を検出する受信可否検出手段23と、第1または第2の位置検出手段により検出された地図上の位置と測位信号電波の受信可否とに基づいて、移動体が移動している道路が地図記憶手段28に記憶されていない新規道路か否かを判定する新規道路判定手段21とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は地図更新システムに関する。
【背景技術】
【0002】
車両が地図データにない道路を走行した場合に、この道路を自動的に地図データに追加して更新するようにしたナビゲーション装置が知られている(例えば、特許文献1参照)。また、GPSなどの位置検出装置で検出された車両の位置と地図データの道路との間に所定距離以上のズレがある場合に、この差分データをセンターへ送信し、センターにおいて同一の道路に対する差分データが所定件数寄せられたら、この道路を新規道路として地図データベースを更新するようにした地図評価システムが知られている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−251790号公報
【特許文献2】特開2004−198997号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した従来の地図更新システムでは、GPSなどの位置検出装置で検出された車両の位置と地図データの道路位置とを比較して新しい道路か否かを判定しているため、地下道やトンネルなどのGPSなどの位置検出装置が測位信号電波を受信できない場所では、新しい道路か否かを正しく判定することができないという問題がある。
【課題を解決するための手段】
【0005】
(1) 請求項1の発明は、地図を記憶する地図記憶手段と、測位信号電波を受信し、測位信号に基づいて移動体の地図上の位置を検出する第1の位置検出手段と、移動体の挙動を検出し、挙動に基づいて移動体の地図上の位置を検出する第2の位置検出手段と、測位信号電波の受信可否を検出する受信可否検出手段と、第1または第2の位置検出手段により検出された地図上の位置と測位信号電波の受信可否とに基づいて、移動体が移動している道路が地図記憶手段に記憶されていない新規道路か否かを判定する新規道路判定手段とを備える地図更新システムである。
(2) 請求項2の発明は、請求項1に記載の地図更新システムにおいて、受信可否検出手段は所定時間中に受信可となる割合を検出し、新規道路判定手段は、第1または第2の位置検出手段により検出された地図上の位置と測位信号電波の受信可となる割合とに基づいて新規道路か否かを判定する。
(3) 請求項3の発明は、請求項2に記載の地図更新システムにおいて、新規道路判定手段は、第1または第2の位置検出手段により検出された地図上の位置と測位信号電波の受信可となる割合とに基づいて、高架または地上または地下の新規道路か否かを判定する。
(4) 請求項4の発明は、請求項1〜3のいずれか一項に記載の地図更新システムにおいて、新規道路判定手段により新規道路と判定された場合に、地図記憶手段に記憶されている地図に新規道路を追加して更新する地図更新手段を備える。
(5) 請求項5の発明は、請求項1〜3のいずれか一項に記載の地図更新システムにおいて、新規道路判定手段により新規道路と判定された場合に、その新規道路に関する情報を地図管理センターへ送信する送信手段を備える。
(6) 請求項6の発明は、請求項5に記載の地図更新システムにおいて、地図管理センターは、同一の新規道路に関する情報が所定件数送信されたら、地図管理センターの地図に新規道路を追加して更新するとともに、新規道路に関する情報を移動体へ配信する。
【発明の効果】
【0006】
本発明によれば、地下道や地下トンネルなどの測位信号電波を受信できない場所でも、新規道路か否かを正しく判定することができる。
【図面の簡単な説明】
【0007】
【図1】一実施の形態の地図更新システムの構成を示す図
【図2】カーナビゲーション装置の構成を示す図
【図3】地図管理センターの構成を示す図
【図4】新規道路走行時に既存の道路に誤ってマップマッチングする例を示す図
【図5】道路種別ごとのGPS信号電波の受信可否とセンサー群による検出結果を示す図
【図6】道路種別ごとのGPS信号電波の受信状況をさらに詳しく示す図
【図7】カーナビゲーション装置による新規道路の判定処理を示すフローチャート
【図8】地図管理センターによる新規道路の判定処理を示すフローチャート
【発明を実施するための形態】
【0008】
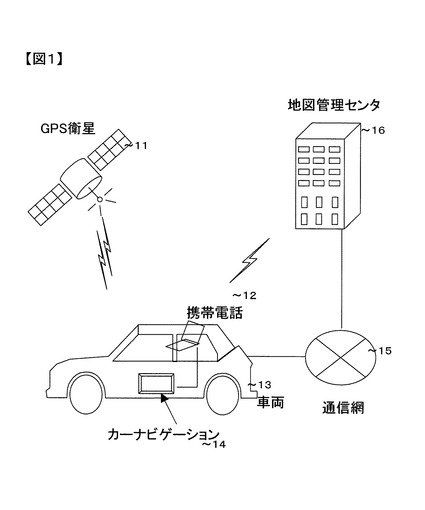
図1は一実施の形態の地図更新システムの構成を示す図である。車両13のカーナビゲーション装置14は、GPS衛星11から送出される測位信号電波を受信して自車位置を測定し、ディスプレイに表示された地図上に表示する。車両13の現在位置を含む種々の情報は、通信網15や携帯電話12などを介して地図管理センター16へ送信される。
【0009】
地図管理センター16には道路地図データベース(詳細後述)が設置されている。また、カーナビゲーション装置14も道路地図記憶装置(詳細後述)を備えている。ところが、これらの地図では新しい道路が建設されても直ちに地図データの更新が行われないため、カーナビゲーション装置14では、地図データが更新されるまでの期間は新規道路データがなく、新しく建設された地下トンネルや高架道路を走行した場合、マップマッチング機能により近くにある従来の道路を走行しているとの誤認が起きる。
【0010】
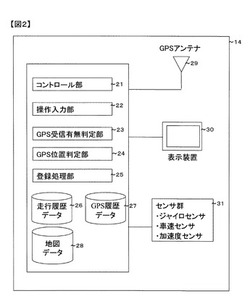
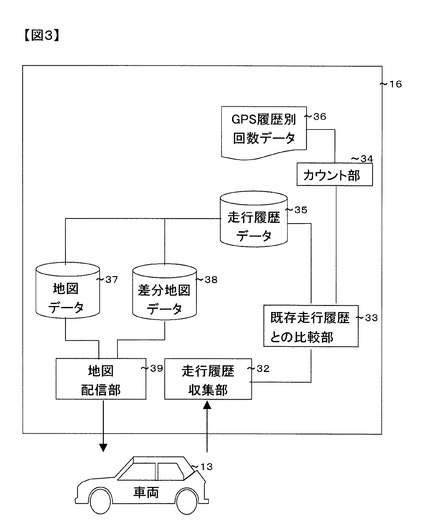
図2は、図1に示すカーナビゲーション装置14の構成を示す図である。カーナビゲーション装置14は、GPSアンテナ29などで受信した測位信号をコントロール部21、GPS位置判定部24、地図データ記憶装置28などにより処理して自車位置を検出し、表示装置30に自車位置周辺の道路地図と自車位置を表示する。GPS受信有無判定部23は、GPSアンテナ29で受信される測位信号電波の受信状況を判定する。コントロール部21は後述する新規道路の判定プログラムを実行し、GPS受信有無判定部23により判定された測位信号電波の受信状況などに基づいて、地下に道路が新設された場合や高架に道路が新設された場合など、走行中の道路が新しく建設された新規道路か否かを判定する。
【0011】
コントロール部21は、GPS位置判定部24により検出された自車位置の履歴データにより自車の走行軌跡を求め、地図データ記憶装置28に記憶されている道路地図とマップマッチングを行って走行中の道路と自車位置を特定する。この走行経路のデータは、走行履歴データ記憶装置26に記憶される。また、GPS位置判定部24により検出されたGPSデータはGPS履歴データ記憶装置27に記憶される。車両13には、車両13の挙動を示すジャイロセンサー、車速センサー、加速度センサーなどのセンサー群31が設置されており、これらのセンサー群31による検出結果は走行経路のデータと対応付けて走行履歴データ記憶装置26に記憶される。
【0012】
登録処理部25は、GPS受信有無判定部23により新規道路の判定がなされ、かつ乗員の登録指示があった場合に、新規道路を地図データ28に登録して道路地図データを更新する。詳細を後述するが、通常は新規道路に関するデータが地図管理センター16に集められ、同一の新規道路に関するデータが所定件数以上あった場合に、地図管理センター16において新規道路の登録が行われ、新規道路に関する更新データ、すなわち既存の道路地図データに新規道路データを付加するための差分データが各車両13に配信される。ここでは、自車が検出した新規道路に対して乗員の許可があった場合には、地図管理センター16を介さずに新規道路の登録、すなわち地図データ記憶装置28の道路地図データの更新が行われる。
【0013】
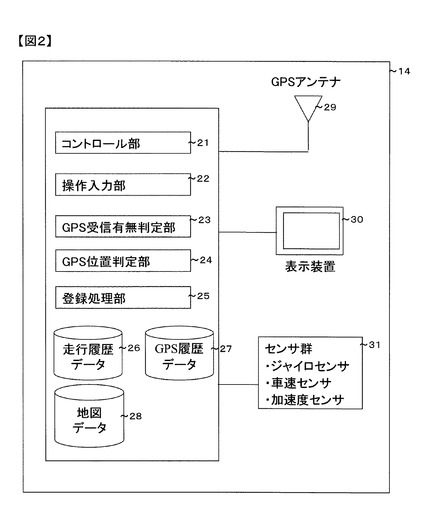
図3は地図管理センター16の構成を示す。この一実施の形態では、複数の車両から走行履歴データを収集し、地図データにない新規道路と判定した場合は道路地図データを更新し、既存の道路地図データに新規道路のデータを付加するための差分地図データを複数の車両に配信する例を示す。
【0014】
車両が新規道路を走行したと判定した場合、新規道路走行後のあるタイミングで走行履歴データを地図管理センター16に送信する。地図管理センター16では、走行履歴収集部32で車両からの走行履歴データを受信すると、既存走行履歴との比較部33により走行履歴データ記憶部35の過去の走行履歴データの中に同一の走行履歴データがあるか否かを検索する。同一の走行履歴データがない場合には、カウント部34がGPS履歴別回数データ記憶部36のカウント値を1にセットして新たなIDを付与し、走行履歴データ記憶部35に記憶する。
【0015】
一方、同一の走行履歴データがあった場合には、カウント部34はGPS履歴別回数データ記憶部36のカウント値に1を加算する。このカウント値があるしきい値に達するまでは異常な運転、データエラー、通信エラーによってもたらされた走行履歴データである可能性があり、新規道路か否かを正確に判定するためにカウント値の加算のみを行う。その後、同一の走行履歴データを何度か受信し、カウント値が予め設定したしきい値に達したら、新規道路である可能性が高いと判断して地図データ記憶装置35の道路地図データを更新する。同時に、新規道路データの追加にともなう既存の道路地図データとの差分の地図データを作成し、差分地図データ記憶装置38に記憶するとともに、地図配信部39を介して複数の車両へ差分地図データを配信する。
【0016】
ここで、カーナビゲーション装置は、GPS位置検出装置により検出された位置と各種センサーで検出された位置や偏移、距離、向きなどのデータを用いて、地図データの最寄の道路に自車位置を合わせるマップマッチング処理を行う。GPSなどの測位信号電波を受信して現在位置を検出する航法システム(衛星航法システムまたは電波航法システム)では、測位信号電波が受信できないと現在地を検出することができない。
【0017】
一方、車両の走行距離と走行方位などの車両の挙動を検出し、車両の挙動に基づいて車両の走行軌跡を演算し、道路地図データとのマップマッチングにより現在位置を検出する航法システム(自律航法システム)では、車両に搭載したセンサー群31(ジャイロセンサー、車速センサー、加速度センサーなど)の検出結果に基づいて現在位置を検出するので、測位信号電波の受信可、不可に拘わらず常に現在位置を検出することができる。トンネルや地下道などGPSの信号電波が受信できない場所を走行する場合には、上述したセンサーからのデータのみを用いて現在位置を検出し、地図データの最寄の道路に自車位置を合わせてマップマッチングを行う。
【0018】
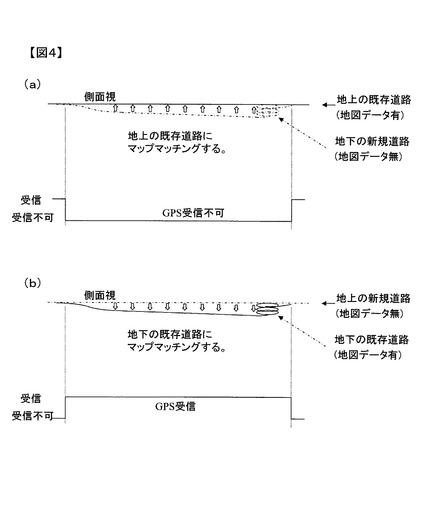
新しい道路を走行した場合に、既存の道路に誤ってマップマッチングする例を説明する。図4(a)は、カーナビゲーション装置に地図データがある地上の既存の道路に沿って、カーナビゲーション装置に地図データがない地下の新しい道路が建設された場合を示す。地下に道路が建設される場合は、公園や公共施設の地下を通って建設される場合もあるが、一般には地上にある既存の道路かその近傍に沿って建設される。地上の既存の道路から地下の新しい道路へ進入した場合には、カーナビゲーション装置に道路地図データがなく、またGPS信号電波が受信できないため、センサーによるマップマッチングで地上の既存道路を走行していると誤判定し、地上の既存道路にマップマッチングする。
【0019】
図4(b)は、カーナビゲーション装置に地図データがある地下の既存の道路に沿って、カーナビゲーション装置に地図データがない地上の新しい道路が建設された場合を示す。地下の既存の道路から地上の新しい道路へ進入した場合には、カーナビゲーション装置に地図データがないため、地上に出てGPS信号電波を受信できても、センサーによるマップマッチングでそのまま地下の既存道路を走行していると誤判定し、地下の既存道路にマップマッチングする。
【0020】
図4(b)に示すケースと同様な誤判定が起きるケースとして、地上の既存の道路に沿って新しく高架道が建設された場合がある。カーナビゲーション装置に地図データがある地上の既存道路に沿って、カーナビゲーション装置に地図データがない新しい高架道が建設された場合に、地上の既存道路から新しい高架道に進入すると、カーナビゲーション装置に地図データがないため、GPS信号電波を受信できても、センサーによるマップマッチングでそのまま地上の既存道路を走行していると誤判定し、地上の既存道路にマップマッチングする。
【0021】
そこで、この一実施の形態では地上の道路、地下の道路、高架の道路ではGPS信号電波の受信可否に差が生じることに注目し、GPS信号電波の受信状況を検出し、受信状況に基づいて走行中の道路が地上または地下、あるいは高架に新しく建設された道路か否かを判定する。
【0022】
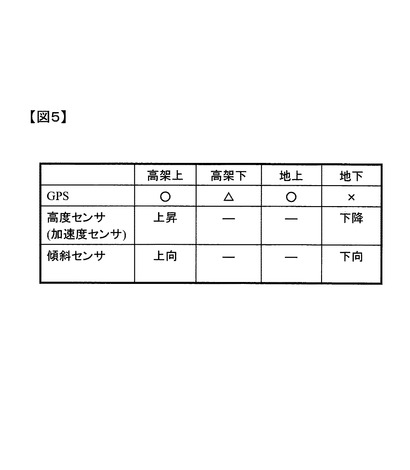
図5は、道路種別ごとのGPSアンテナ29による信号電波の受信可否と、センサー群31による検出結果を示す。GPSアンテナ29によるGPS信号電波の受信は、高架上と地上の道路では受信可能であるが、高架下の道路では受信可と不可が頻繁に切り換わる。また、地下の道路では常に受信不可となる。一方、センサー群31の高度センサー(加速度センサー)や傾斜センサーは、地上道路から高架道路へ進入した場合に上昇と上向きを検知し、地上道路から地下道路へ進入した場合には下降と下向きを検知する。
【0023】
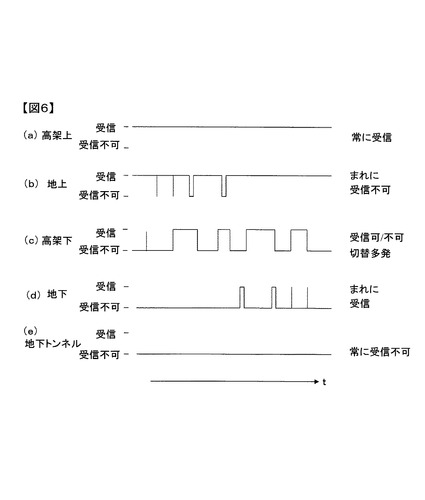
図6は、道路種別ごとのGPSアンテナ29によるGPS信号電波の受信状況をさらに詳しく示す図である。車両が高架上の道路を走行しているときには、図6(a)に示すように、上空と車両の間を遮るものがほとんどないため、常に受信可能である。車両が地上の道路を走行しているときには、図6(b)に示すように、上空と車両の間をビルや樹木によりまれに遮られるため、時々受信不可になることがある。車両が高架下の道路を走行しているときには、図6(c)に示すように、上空と車両の間を高架道により時々遮られるため、受信可と不可を繰り返す。
【0024】
車両が地下道を走行しているときには、図6(d)に示すように、上空と車両の間をほとんど遮られたままになるため、まれに受信可能となる。車両が地下トンネルを走行しているときには、図6(e)に示すように、上空と車両との間がまったく遮られるため、常に受信不可の状態が続く。このように、GPS信号電波が受信可となる比率に基づいて走行中の道路種別を判定することができる。
【0025】
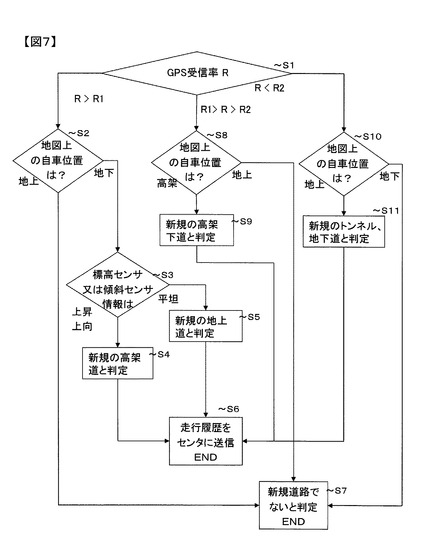
図7は、カーナビゲーション装置14による新規道路の判定処理を示すフローチャートである。カーナビゲーション装置14のコントロール部21は、車両の走行中にこの新規道路の判定処理を繰り返し実行する。ステップ1において、GPS信号電波の受信率Rを求め、GPS受信率Rに応じて分岐する。ここで、GPS受信率Rは、GPS受信有無判定部23により所定時間Tの間にGPS信号電波を受信したと判定された時間の合計値T1を求め、
R=T1/T ・・・(1)
として算出する。なお、(1)式によるGPS受信率Rの代わりに、所定時間内にGPS信号の受信可の合計時間と受信不可の合計時間の比率を用いてもよい。
【0026】
この一実施の形態では、GPS信号電波の受信率Rに基づいて走行中の道路種別を判定するために、大小二つのしきい値R1、R2(<R1)を設定する。大きいしきい値R1は、例えば、図6(b)に示す地上道路と図6(c)に示す高架下道路とを判別するための受信率とし、受信率Rがしきい値R1より大きい場合は高架上の道路または地上の道路を走行中であると判定し、受信率Rがしきい値R1より小さい場合には高架下の道路を走行中であると判定する。
【0027】
小さいしきい値R2は、例えば、図6(c)に示す高架下道路と図6(d)に示す地下道とを判別するための受信率とし、受信率Rがしきい値R2より大きい場合は高架下道路を走行中であると判定し、受信率がR2より小さい場合は地下道または地下トンネルを走行中であると判定する。なお、しきい値R1とR2の設定方法はこの一実施の形態の設定方法に限定されるものではない。
【0028】
ステップ1において、GPS信号電波の受信率Rがしきい値R1より大きいと判定された場合はステップ2へ進み、マップマッチング結果の自車位置が地図の地上道路にあるか、または地下道路にあるかを判別する。GPS受信率Rがしきい値R1より大きいから高架上道路か地上道路を走行していると考えられ、さらにマップマッチング結果の自車位置が地上道路にある場合は、地上道路を走行していると判断する。この場合ステップ7へ進み、現在走行中の道路は新規道路ではないと判定する。
【0029】
一方、GPS受信率Rがしきい値R1より大きいから高架上道路か地上道路を走行しており、かつマップマッチング結果の自車位置が地下道路にある場合は、ステップ3へ進む。ステップ3ではセンサー群31の標高センサーまたは傾斜センサーの検出結果が上昇または上向きか、あるいは平坦かを判別する。GPS受信率Rから高架上道路または地上道路を走行していると判定され、標高センサーまたは傾斜センサーにより車両が上昇または上向きの状態であると判定された場合には、地下道路へのマップマッチング結果は誤認であり、ステップ4へ進んで車両は現在新しく建設された高架上の道路を走行していると判定する。続くステップ6で新規の高架上道路に関する走行履歴データを地図管理センター16へ送信する。
【0030】
GPS受信率Rから高架上道路または地上道路を走行していると判定され、標高センサーまたは傾斜センサーにより車両が平坦な道路を走行していると判定された場合には、地下道路へのマップマッチング結果は誤認であり、ステップ5へ進んで車両は現在新しく建設された地上道路を走行していると判定する。続くステップ6で新規の地上道路に関する走行履歴データを地図管理センター16へ送信する。
【0031】
次に、ステップ1において、GPS信号電波の受信率Rがしきい値R1より小さくしきい値R2より大きいと判定された場合はステップ8へ進み、マップマッチング結果の自車位置が地図の高架上道路にあるか、または地上道路にあるかを判別する。自車位置が高架上道路にあると判別された場合はステップ9へ進み、マップマッチング結果は高架上道路であっても、GPS受診率Rは高架上道路の場合のしきい値R1より小さいので、車両は今、高架下に建設された新しい道路を走行していると判定し、ステップ6へ進んで新規の高架下道路に関する走行履歴データを地図管理センター16へ送信する。
【0032】
一方、自車位置が地上道路にあると判定された場合はステップ7へ進み、新規道路ではないと判定する。
【0033】
ステップ1において、GPS信号電波の受診率Rがしきい値R2より小さいと判定された場合はステップ10へ進み、マップマッチング結果の自車位置が地図の地上道路にあるか、または地下道路にあるかを判別する。自車位置が地上道路にあると判別された場合はステップ11へ進み、マップマッチング結果は地上道路であっても、GPS受診率Rが高架下道路の場合のしきい値R1より小さいので、車両は今、地下に建設された新しい道路を走行していると判定し、ステップ6へ進んで新規の地下道路に関する走行履歴データを地図管理センター16へ送信する。
【0034】
一方、自車位置が地下道路にあると判定された場合はステップ7へ進み、GPS受信率Rによる判定結果とマップマッチングによる道路種別の判定結果が一致するので新規道路ではないと判定する。
【0035】
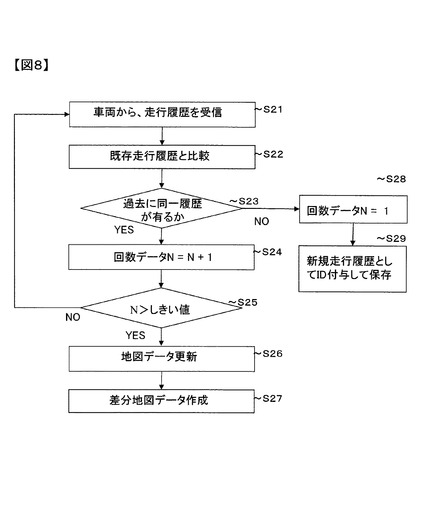
図8は、地図管理センター16による新規道路の判定処理を示すフローチャートである。地図管理センター16はこの新規道路の判定処理を繰り返し実行する。ステップ21で車両から走行履歴データを受信したらステップ22へ進み、既存走行履歴との比較部33により走行履歴データ記憶装置35に記憶されているそれまでに各車から収集した走行履歴データと比較する。続くステップ23において、走行履歴データ記憶装置35に過去の同一の履歴データが記憶されているか否かを判別する。
【0036】
同一の履歴データが記憶されていない場合はステップ28へ進み、カウント部34により回数データNに1を設定してGPS履歴別回数データ記憶部36に記憶し、続くステップ29で新規走行履歴データとしてID番号を付与して走行履歴データ記憶装置35に記憶する。
【0037】
一方、同一の履歴データが記憶されている場合はステップ24へ進み、カウント部34によりGPS履歴別回数データ記憶部36に記憶されている同一の履歴データの回数データNに1を加算する。続くステップ25では、この回数データNが予め設定したしきい値を超えるか否かを判別する。回数データNがしきい値を越えていない場合は、データエラーや通信エラーが原因の誤りの可能性があるため、新規道路と確定できないとしてステップ21へ戻り、上述した処理を繰り返す。
【0038】
一方、回数データNがしきい値を超えた場合はステップ26へ進み、履歴データが新規道路のものであると判断して地図データ記憶装置37の道路地図データを更新する。続くステップ27では、更新前の道路地図データに対する更新後の道路地図データの差分地図データを生成し、地図配信部39から各車両に配信する。
【0039】
上述した一実施の形態では、自動車に搭載されたナビゲーション装置を例に挙げて説明したが、本発明は鉄道車両や航空機などを含む自動車以外のあらゆる移動体に適用することができる。また、例えばナビゲーション携帯端末などの車両以外の移動体にも適用することができる。
【0040】
なお、上述した実施の形態とそれらの変形例において、実施の形態と変形例とのあらゆる組み合わせが可能である。
【0041】
上述した実施の形態とその変形例によれば以下のような作用効果を奏することができる。まず、測位信号電波を受信し、受信した測位信号に基づいて車両の地図上の位置を検出するとともに、車両の挙動を検出し、検出した挙動に基づいて車両の地図上の位置を検出する。さらに、測位信号電波の受信可否を検出し、検出された地図上の位置と測位信号電波の受信可否とに基づいて、車両が走行中の道路が地図データ記憶装置に記憶されていない新規道路か否かを判定するようにしたので、地下道や地下トンネルなどの測位信号電波を受信できない場所でも、新規道路か否かを正しく判定することができる。
【0042】
上述した実施の形態とその変形例によれば、測位信号電波を所定時間中に受信可となる受信率を検出し、検出された地図上の位置と測位信号電波の受信率とに基づいて新規道路か否かを判定するようにしたので、高架または地上または地下の新規道路か否かを正しく判定することができる。
【0043】
上述した実施の形態とその変形例によれば、新規道路と判定された場合に、その新規道路に関する情報を地図管理センターへ送信し、地図管理センターでは、同一の新規道路に関する情報が所定件数送信されたら、地図管理センターの地図データ記憶装置に新規道路を追加して更新するとともに、新規道路に関する情報を車両へ配信するようにしたので、車両における誤判定や各種エラーにより新規道路ではない道路が追加されるのを防止でき、道路地図更新におけるシステムの信頼性を向上させることができる。
【符号の説明】
【0044】
13;車両、14;カーナビゲーション装置、16;地図管理センター、21;コントロール部、22;操作入力部、23;GPS受信有無判定部、24;GPS位置判定部、25;登録処理部、28;地図データ記憶装置、31;センサー群、33;既存走行履歴との比較部、34;カウント部、35;走行履歴データ記憶装置、36;GPS履歴別回数データ記憶装置、37;地図データ記憶装置、39;地図配信部
【技術分野】
【0001】
本発明は地図更新システムに関する。
【背景技術】
【0002】
車両が地図データにない道路を走行した場合に、この道路を自動的に地図データに追加して更新するようにしたナビゲーション装置が知られている(例えば、特許文献1参照)。また、GPSなどの位置検出装置で検出された車両の位置と地図データの道路との間に所定距離以上のズレがある場合に、この差分データをセンターへ送信し、センターにおいて同一の道路に対する差分データが所定件数寄せられたら、この道路を新規道路として地図データベースを更新するようにした地図評価システムが知られている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−251790号公報
【特許文献2】特開2004−198997号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した従来の地図更新システムでは、GPSなどの位置検出装置で検出された車両の位置と地図データの道路位置とを比較して新しい道路か否かを判定しているため、地下道やトンネルなどのGPSなどの位置検出装置が測位信号電波を受信できない場所では、新しい道路か否かを正しく判定することができないという問題がある。
【課題を解決するための手段】
【0005】
(1) 請求項1の発明は、地図を記憶する地図記憶手段と、測位信号電波を受信し、測位信号に基づいて移動体の地図上の位置を検出する第1の位置検出手段と、移動体の挙動を検出し、挙動に基づいて移動体の地図上の位置を検出する第2の位置検出手段と、測位信号電波の受信可否を検出する受信可否検出手段と、第1または第2の位置検出手段により検出された地図上の位置と測位信号電波の受信可否とに基づいて、移動体が移動している道路が地図記憶手段に記憶されていない新規道路か否かを判定する新規道路判定手段とを備える地図更新システムである。
(2) 請求項2の発明は、請求項1に記載の地図更新システムにおいて、受信可否検出手段は所定時間中に受信可となる割合を検出し、新規道路判定手段は、第1または第2の位置検出手段により検出された地図上の位置と測位信号電波の受信可となる割合とに基づいて新規道路か否かを判定する。
(3) 請求項3の発明は、請求項2に記載の地図更新システムにおいて、新規道路判定手段は、第1または第2の位置検出手段により検出された地図上の位置と測位信号電波の受信可となる割合とに基づいて、高架または地上または地下の新規道路か否かを判定する。
(4) 請求項4の発明は、請求項1〜3のいずれか一項に記載の地図更新システムにおいて、新規道路判定手段により新規道路と判定された場合に、地図記憶手段に記憶されている地図に新規道路を追加して更新する地図更新手段を備える。
(5) 請求項5の発明は、請求項1〜3のいずれか一項に記載の地図更新システムにおいて、新規道路判定手段により新規道路と判定された場合に、その新規道路に関する情報を地図管理センターへ送信する送信手段を備える。
(6) 請求項6の発明は、請求項5に記載の地図更新システムにおいて、地図管理センターは、同一の新規道路に関する情報が所定件数送信されたら、地図管理センターの地図に新規道路を追加して更新するとともに、新規道路に関する情報を移動体へ配信する。
【発明の効果】
【0006】
本発明によれば、地下道や地下トンネルなどの測位信号電波を受信できない場所でも、新規道路か否かを正しく判定することができる。
【図面の簡単な説明】
【0007】
【図1】一実施の形態の地図更新システムの構成を示す図
【図2】カーナビゲーション装置の構成を示す図
【図3】地図管理センターの構成を示す図
【図4】新規道路走行時に既存の道路に誤ってマップマッチングする例を示す図
【図5】道路種別ごとのGPS信号電波の受信可否とセンサー群による検出結果を示す図
【図6】道路種別ごとのGPS信号電波の受信状況をさらに詳しく示す図
【図7】カーナビゲーション装置による新規道路の判定処理を示すフローチャート
【図8】地図管理センターによる新規道路の判定処理を示すフローチャート
【発明を実施するための形態】
【0008】
図1は一実施の形態の地図更新システムの構成を示す図である。車両13のカーナビゲーション装置14は、GPS衛星11から送出される測位信号電波を受信して自車位置を測定し、ディスプレイに表示された地図上に表示する。車両13の現在位置を含む種々の情報は、通信網15や携帯電話12などを介して地図管理センター16へ送信される。
【0009】
地図管理センター16には道路地図データベース(詳細後述)が設置されている。また、カーナビゲーション装置14も道路地図記憶装置(詳細後述)を備えている。ところが、これらの地図では新しい道路が建設されても直ちに地図データの更新が行われないため、カーナビゲーション装置14では、地図データが更新されるまでの期間は新規道路データがなく、新しく建設された地下トンネルや高架道路を走行した場合、マップマッチング機能により近くにある従来の道路を走行しているとの誤認が起きる。
【0010】
図2は、図1に示すカーナビゲーション装置14の構成を示す図である。カーナビゲーション装置14は、GPSアンテナ29などで受信した測位信号をコントロール部21、GPS位置判定部24、地図データ記憶装置28などにより処理して自車位置を検出し、表示装置30に自車位置周辺の道路地図と自車位置を表示する。GPS受信有無判定部23は、GPSアンテナ29で受信される測位信号電波の受信状況を判定する。コントロール部21は後述する新規道路の判定プログラムを実行し、GPS受信有無判定部23により判定された測位信号電波の受信状況などに基づいて、地下に道路が新設された場合や高架に道路が新設された場合など、走行中の道路が新しく建設された新規道路か否かを判定する。
【0011】
コントロール部21は、GPS位置判定部24により検出された自車位置の履歴データにより自車の走行軌跡を求め、地図データ記憶装置28に記憶されている道路地図とマップマッチングを行って走行中の道路と自車位置を特定する。この走行経路のデータは、走行履歴データ記憶装置26に記憶される。また、GPS位置判定部24により検出されたGPSデータはGPS履歴データ記憶装置27に記憶される。車両13には、車両13の挙動を示すジャイロセンサー、車速センサー、加速度センサーなどのセンサー群31が設置されており、これらのセンサー群31による検出結果は走行経路のデータと対応付けて走行履歴データ記憶装置26に記憶される。
【0012】
登録処理部25は、GPS受信有無判定部23により新規道路の判定がなされ、かつ乗員の登録指示があった場合に、新規道路を地図データ28に登録して道路地図データを更新する。詳細を後述するが、通常は新規道路に関するデータが地図管理センター16に集められ、同一の新規道路に関するデータが所定件数以上あった場合に、地図管理センター16において新規道路の登録が行われ、新規道路に関する更新データ、すなわち既存の道路地図データに新規道路データを付加するための差分データが各車両13に配信される。ここでは、自車が検出した新規道路に対して乗員の許可があった場合には、地図管理センター16を介さずに新規道路の登録、すなわち地図データ記憶装置28の道路地図データの更新が行われる。
【0013】
図3は地図管理センター16の構成を示す。この一実施の形態では、複数の車両から走行履歴データを収集し、地図データにない新規道路と判定した場合は道路地図データを更新し、既存の道路地図データに新規道路のデータを付加するための差分地図データを複数の車両に配信する例を示す。
【0014】
車両が新規道路を走行したと判定した場合、新規道路走行後のあるタイミングで走行履歴データを地図管理センター16に送信する。地図管理センター16では、走行履歴収集部32で車両からの走行履歴データを受信すると、既存走行履歴との比較部33により走行履歴データ記憶部35の過去の走行履歴データの中に同一の走行履歴データがあるか否かを検索する。同一の走行履歴データがない場合には、カウント部34がGPS履歴別回数データ記憶部36のカウント値を1にセットして新たなIDを付与し、走行履歴データ記憶部35に記憶する。
【0015】
一方、同一の走行履歴データがあった場合には、カウント部34はGPS履歴別回数データ記憶部36のカウント値に1を加算する。このカウント値があるしきい値に達するまでは異常な運転、データエラー、通信エラーによってもたらされた走行履歴データである可能性があり、新規道路か否かを正確に判定するためにカウント値の加算のみを行う。その後、同一の走行履歴データを何度か受信し、カウント値が予め設定したしきい値に達したら、新規道路である可能性が高いと判断して地図データ記憶装置35の道路地図データを更新する。同時に、新規道路データの追加にともなう既存の道路地図データとの差分の地図データを作成し、差分地図データ記憶装置38に記憶するとともに、地図配信部39を介して複数の車両へ差分地図データを配信する。
【0016】
ここで、カーナビゲーション装置は、GPS位置検出装置により検出された位置と各種センサーで検出された位置や偏移、距離、向きなどのデータを用いて、地図データの最寄の道路に自車位置を合わせるマップマッチング処理を行う。GPSなどの測位信号電波を受信して現在位置を検出する航法システム(衛星航法システムまたは電波航法システム)では、測位信号電波が受信できないと現在地を検出することができない。
【0017】
一方、車両の走行距離と走行方位などの車両の挙動を検出し、車両の挙動に基づいて車両の走行軌跡を演算し、道路地図データとのマップマッチングにより現在位置を検出する航法システム(自律航法システム)では、車両に搭載したセンサー群31(ジャイロセンサー、車速センサー、加速度センサーなど)の検出結果に基づいて現在位置を検出するので、測位信号電波の受信可、不可に拘わらず常に現在位置を検出することができる。トンネルや地下道などGPSの信号電波が受信できない場所を走行する場合には、上述したセンサーからのデータのみを用いて現在位置を検出し、地図データの最寄の道路に自車位置を合わせてマップマッチングを行う。
【0018】
新しい道路を走行した場合に、既存の道路に誤ってマップマッチングする例を説明する。図4(a)は、カーナビゲーション装置に地図データがある地上の既存の道路に沿って、カーナビゲーション装置に地図データがない地下の新しい道路が建設された場合を示す。地下に道路が建設される場合は、公園や公共施設の地下を通って建設される場合もあるが、一般には地上にある既存の道路かその近傍に沿って建設される。地上の既存の道路から地下の新しい道路へ進入した場合には、カーナビゲーション装置に道路地図データがなく、またGPS信号電波が受信できないため、センサーによるマップマッチングで地上の既存道路を走行していると誤判定し、地上の既存道路にマップマッチングする。
【0019】
図4(b)は、カーナビゲーション装置に地図データがある地下の既存の道路に沿って、カーナビゲーション装置に地図データがない地上の新しい道路が建設された場合を示す。地下の既存の道路から地上の新しい道路へ進入した場合には、カーナビゲーション装置に地図データがないため、地上に出てGPS信号電波を受信できても、センサーによるマップマッチングでそのまま地下の既存道路を走行していると誤判定し、地下の既存道路にマップマッチングする。
【0020】
図4(b)に示すケースと同様な誤判定が起きるケースとして、地上の既存の道路に沿って新しく高架道が建設された場合がある。カーナビゲーション装置に地図データがある地上の既存道路に沿って、カーナビゲーション装置に地図データがない新しい高架道が建設された場合に、地上の既存道路から新しい高架道に進入すると、カーナビゲーション装置に地図データがないため、GPS信号電波を受信できても、センサーによるマップマッチングでそのまま地上の既存道路を走行していると誤判定し、地上の既存道路にマップマッチングする。
【0021】
そこで、この一実施の形態では地上の道路、地下の道路、高架の道路ではGPS信号電波の受信可否に差が生じることに注目し、GPS信号電波の受信状況を検出し、受信状況に基づいて走行中の道路が地上または地下、あるいは高架に新しく建設された道路か否かを判定する。
【0022】
図5は、道路種別ごとのGPSアンテナ29による信号電波の受信可否と、センサー群31による検出結果を示す。GPSアンテナ29によるGPS信号電波の受信は、高架上と地上の道路では受信可能であるが、高架下の道路では受信可と不可が頻繁に切り換わる。また、地下の道路では常に受信不可となる。一方、センサー群31の高度センサー(加速度センサー)や傾斜センサーは、地上道路から高架道路へ進入した場合に上昇と上向きを検知し、地上道路から地下道路へ進入した場合には下降と下向きを検知する。
【0023】
図6は、道路種別ごとのGPSアンテナ29によるGPS信号電波の受信状況をさらに詳しく示す図である。車両が高架上の道路を走行しているときには、図6(a)に示すように、上空と車両の間を遮るものがほとんどないため、常に受信可能である。車両が地上の道路を走行しているときには、図6(b)に示すように、上空と車両の間をビルや樹木によりまれに遮られるため、時々受信不可になることがある。車両が高架下の道路を走行しているときには、図6(c)に示すように、上空と車両の間を高架道により時々遮られるため、受信可と不可を繰り返す。
【0024】
車両が地下道を走行しているときには、図6(d)に示すように、上空と車両の間をほとんど遮られたままになるため、まれに受信可能となる。車両が地下トンネルを走行しているときには、図6(e)に示すように、上空と車両との間がまったく遮られるため、常に受信不可の状態が続く。このように、GPS信号電波が受信可となる比率に基づいて走行中の道路種別を判定することができる。
【0025】
図7は、カーナビゲーション装置14による新規道路の判定処理を示すフローチャートである。カーナビゲーション装置14のコントロール部21は、車両の走行中にこの新規道路の判定処理を繰り返し実行する。ステップ1において、GPS信号電波の受信率Rを求め、GPS受信率Rに応じて分岐する。ここで、GPS受信率Rは、GPS受信有無判定部23により所定時間Tの間にGPS信号電波を受信したと判定された時間の合計値T1を求め、
R=T1/T ・・・(1)
として算出する。なお、(1)式によるGPS受信率Rの代わりに、所定時間内にGPS信号の受信可の合計時間と受信不可の合計時間の比率を用いてもよい。
【0026】
この一実施の形態では、GPS信号電波の受信率Rに基づいて走行中の道路種別を判定するために、大小二つのしきい値R1、R2(<R1)を設定する。大きいしきい値R1は、例えば、図6(b)に示す地上道路と図6(c)に示す高架下道路とを判別するための受信率とし、受信率Rがしきい値R1より大きい場合は高架上の道路または地上の道路を走行中であると判定し、受信率Rがしきい値R1より小さい場合には高架下の道路を走行中であると判定する。
【0027】
小さいしきい値R2は、例えば、図6(c)に示す高架下道路と図6(d)に示す地下道とを判別するための受信率とし、受信率Rがしきい値R2より大きい場合は高架下道路を走行中であると判定し、受信率がR2より小さい場合は地下道または地下トンネルを走行中であると判定する。なお、しきい値R1とR2の設定方法はこの一実施の形態の設定方法に限定されるものではない。
【0028】
ステップ1において、GPS信号電波の受信率Rがしきい値R1より大きいと判定された場合はステップ2へ進み、マップマッチング結果の自車位置が地図の地上道路にあるか、または地下道路にあるかを判別する。GPS受信率Rがしきい値R1より大きいから高架上道路か地上道路を走行していると考えられ、さらにマップマッチング結果の自車位置が地上道路にある場合は、地上道路を走行していると判断する。この場合ステップ7へ進み、現在走行中の道路は新規道路ではないと判定する。
【0029】
一方、GPS受信率Rがしきい値R1より大きいから高架上道路か地上道路を走行しており、かつマップマッチング結果の自車位置が地下道路にある場合は、ステップ3へ進む。ステップ3ではセンサー群31の標高センサーまたは傾斜センサーの検出結果が上昇または上向きか、あるいは平坦かを判別する。GPS受信率Rから高架上道路または地上道路を走行していると判定され、標高センサーまたは傾斜センサーにより車両が上昇または上向きの状態であると判定された場合には、地下道路へのマップマッチング結果は誤認であり、ステップ4へ進んで車両は現在新しく建設された高架上の道路を走行していると判定する。続くステップ6で新規の高架上道路に関する走行履歴データを地図管理センター16へ送信する。
【0030】
GPS受信率Rから高架上道路または地上道路を走行していると判定され、標高センサーまたは傾斜センサーにより車両が平坦な道路を走行していると判定された場合には、地下道路へのマップマッチング結果は誤認であり、ステップ5へ進んで車両は現在新しく建設された地上道路を走行していると判定する。続くステップ6で新規の地上道路に関する走行履歴データを地図管理センター16へ送信する。
【0031】
次に、ステップ1において、GPS信号電波の受信率Rがしきい値R1より小さくしきい値R2より大きいと判定された場合はステップ8へ進み、マップマッチング結果の自車位置が地図の高架上道路にあるか、または地上道路にあるかを判別する。自車位置が高架上道路にあると判別された場合はステップ9へ進み、マップマッチング結果は高架上道路であっても、GPS受診率Rは高架上道路の場合のしきい値R1より小さいので、車両は今、高架下に建設された新しい道路を走行していると判定し、ステップ6へ進んで新規の高架下道路に関する走行履歴データを地図管理センター16へ送信する。
【0032】
一方、自車位置が地上道路にあると判定された場合はステップ7へ進み、新規道路ではないと判定する。
【0033】
ステップ1において、GPS信号電波の受診率Rがしきい値R2より小さいと判定された場合はステップ10へ進み、マップマッチング結果の自車位置が地図の地上道路にあるか、または地下道路にあるかを判別する。自車位置が地上道路にあると判別された場合はステップ11へ進み、マップマッチング結果は地上道路であっても、GPS受診率Rが高架下道路の場合のしきい値R1より小さいので、車両は今、地下に建設された新しい道路を走行していると判定し、ステップ6へ進んで新規の地下道路に関する走行履歴データを地図管理センター16へ送信する。
【0034】
一方、自車位置が地下道路にあると判定された場合はステップ7へ進み、GPS受信率Rによる判定結果とマップマッチングによる道路種別の判定結果が一致するので新規道路ではないと判定する。
【0035】
図8は、地図管理センター16による新規道路の判定処理を示すフローチャートである。地図管理センター16はこの新規道路の判定処理を繰り返し実行する。ステップ21で車両から走行履歴データを受信したらステップ22へ進み、既存走行履歴との比較部33により走行履歴データ記憶装置35に記憶されているそれまでに各車から収集した走行履歴データと比較する。続くステップ23において、走行履歴データ記憶装置35に過去の同一の履歴データが記憶されているか否かを判別する。
【0036】
同一の履歴データが記憶されていない場合はステップ28へ進み、カウント部34により回数データNに1を設定してGPS履歴別回数データ記憶部36に記憶し、続くステップ29で新規走行履歴データとしてID番号を付与して走行履歴データ記憶装置35に記憶する。
【0037】
一方、同一の履歴データが記憶されている場合はステップ24へ進み、カウント部34によりGPS履歴別回数データ記憶部36に記憶されている同一の履歴データの回数データNに1を加算する。続くステップ25では、この回数データNが予め設定したしきい値を超えるか否かを判別する。回数データNがしきい値を越えていない場合は、データエラーや通信エラーが原因の誤りの可能性があるため、新規道路と確定できないとしてステップ21へ戻り、上述した処理を繰り返す。
【0038】
一方、回数データNがしきい値を超えた場合はステップ26へ進み、履歴データが新規道路のものであると判断して地図データ記憶装置37の道路地図データを更新する。続くステップ27では、更新前の道路地図データに対する更新後の道路地図データの差分地図データを生成し、地図配信部39から各車両に配信する。
【0039】
上述した一実施の形態では、自動車に搭載されたナビゲーション装置を例に挙げて説明したが、本発明は鉄道車両や航空機などを含む自動車以外のあらゆる移動体に適用することができる。また、例えばナビゲーション携帯端末などの車両以外の移動体にも適用することができる。
【0040】
なお、上述した実施の形態とそれらの変形例において、実施の形態と変形例とのあらゆる組み合わせが可能である。
【0041】
上述した実施の形態とその変形例によれば以下のような作用効果を奏することができる。まず、測位信号電波を受信し、受信した測位信号に基づいて車両の地図上の位置を検出するとともに、車両の挙動を検出し、検出した挙動に基づいて車両の地図上の位置を検出する。さらに、測位信号電波の受信可否を検出し、検出された地図上の位置と測位信号電波の受信可否とに基づいて、車両が走行中の道路が地図データ記憶装置に記憶されていない新規道路か否かを判定するようにしたので、地下道や地下トンネルなどの測位信号電波を受信できない場所でも、新規道路か否かを正しく判定することができる。
【0042】
上述した実施の形態とその変形例によれば、測位信号電波を所定時間中に受信可となる受信率を検出し、検出された地図上の位置と測位信号電波の受信率とに基づいて新規道路か否かを判定するようにしたので、高架または地上または地下の新規道路か否かを正しく判定することができる。
【0043】
上述した実施の形態とその変形例によれば、新規道路と判定された場合に、その新規道路に関する情報を地図管理センターへ送信し、地図管理センターでは、同一の新規道路に関する情報が所定件数送信されたら、地図管理センターの地図データ記憶装置に新規道路を追加して更新するとともに、新規道路に関する情報を車両へ配信するようにしたので、車両における誤判定や各種エラーにより新規道路ではない道路が追加されるのを防止でき、道路地図更新におけるシステムの信頼性を向上させることができる。
【符号の説明】
【0044】
13;車両、14;カーナビゲーション装置、16;地図管理センター、21;コントロール部、22;操作入力部、23;GPS受信有無判定部、24;GPS位置判定部、25;登録処理部、28;地図データ記憶装置、31;センサー群、33;既存走行履歴との比較部、34;カウント部、35;走行履歴データ記憶装置、36;GPS履歴別回数データ記憶装置、37;地図データ記憶装置、39;地図配信部
【特許請求の範囲】
【請求項1】
地図を記憶する地図記憶手段と、
測位信号電波を受信し、測位信号に基づいて移動体の前記地図上の位置を検出する第1の位置検出手段と、
前記移動体の挙動を検出し、挙動に基づいて前記移動体の前記地図上の位置を検出する第2の位置検出手段と、
前記測位信号電波の受信可否を検出する受信可否検出手段と、
前記第1または第2の位置検出手段により検出された前記地図上の位置と前記測位信号電波の受信可否とに基づいて、前記移動体が移動している道路が前記地図記憶手段に記憶されていない新規道路か否かを判定する新規道路判定手段とを備えることを特徴とする地図更新システム。
【請求項2】
請求項1に記載の地図更新システムにおいて、
前記受信可否検出手段は所定時間中に受信可となる割合を検出し、
前記新規道路判定手段は、前記第1または第2の位置検出手段により検出された前記地図上の位置と前記測位信号電波の受信可となる割合とに基づいて新規道路か否かを判定することを特徴とする地図更新システム。
【請求項3】
請求項2に記載の地図更新システムにおいて、
前記新規道路判定手段は、前記第1または第2の位置検出手段により検出された前記地図上の位置と前記測位信号電波の受信可となる割合とに基づいて、高架または地上または地下の新規道路か否かを判定することを特徴とする地図更新システム。
【請求項4】
請求項1〜3のいずれか一項に記載の地図更新システムにおいて、
前記新規道路判定手段により新規道路と判定された場合に、前記地図記憶手段に記憶されている地図に前記新規道路を追加して更新する地図更新手段を備えることを特徴とする地図更新システム。
【請求項5】
請求項1〜3のいずれか一項に記載の地図更新システムにおいて、
前記新規道路判定手段により新規道路と判定された場合に、その新規道路に関する情報を地図管理センターへ送信する送信手段を備えることを特徴とする地図更新システム。
【請求項6】
請求項5に記載の地図更新システムにおいて、
前記地図管理センターは、同一の新規道路に関する情報が所定件数送信されたら、前記地図管理センターの地図に前記新規道路を追加して更新するとともに、前記新規道路に関する情報を前記移動体へ配信することを特徴とする地図更新システム。
【請求項1】
地図を記憶する地図記憶手段と、
測位信号電波を受信し、測位信号に基づいて移動体の前記地図上の位置を検出する第1の位置検出手段と、
前記移動体の挙動を検出し、挙動に基づいて前記移動体の前記地図上の位置を検出する第2の位置検出手段と、
前記測位信号電波の受信可否を検出する受信可否検出手段と、
前記第1または第2の位置検出手段により検出された前記地図上の位置と前記測位信号電波の受信可否とに基づいて、前記移動体が移動している道路が前記地図記憶手段に記憶されていない新規道路か否かを判定する新規道路判定手段とを備えることを特徴とする地図更新システム。
【請求項2】
請求項1に記載の地図更新システムにおいて、
前記受信可否検出手段は所定時間中に受信可となる割合を検出し、
前記新規道路判定手段は、前記第1または第2の位置検出手段により検出された前記地図上の位置と前記測位信号電波の受信可となる割合とに基づいて新規道路か否かを判定することを特徴とする地図更新システム。
【請求項3】
請求項2に記載の地図更新システムにおいて、
前記新規道路判定手段は、前記第1または第2の位置検出手段により検出された前記地図上の位置と前記測位信号電波の受信可となる割合とに基づいて、高架または地上または地下の新規道路か否かを判定することを特徴とする地図更新システム。
【請求項4】
請求項1〜3のいずれか一項に記載の地図更新システムにおいて、
前記新規道路判定手段により新規道路と判定された場合に、前記地図記憶手段に記憶されている地図に前記新規道路を追加して更新する地図更新手段を備えることを特徴とする地図更新システム。
【請求項5】
請求項1〜3のいずれか一項に記載の地図更新システムにおいて、
前記新規道路判定手段により新規道路と判定された場合に、その新規道路に関する情報を地図管理センターへ送信する送信手段を備えることを特徴とする地図更新システム。
【請求項6】
請求項5に記載の地図更新システムにおいて、
前記地図管理センターは、同一の新規道路に関する情報が所定件数送信されたら、前記地図管理センターの地図に前記新規道路を追加して更新するとともに、前記新規道路に関する情報を前記移動体へ配信することを特徴とする地図更新システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−2782(P2012−2782A)
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願番号】特願2010−140722(P2010−140722)
【出願日】平成22年6月21日(2010.6.21)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願日】平成22年6月21日(2010.6.21)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]