
地図画像処理装置、地図画像処理方法、および、コンピュータプログラム
【課題】3次元地図データの作成を効率良く行う。
【解決手段】地図画像処理装置200は、3次元座標空間で表された3次元地図データを記憶する記憶部D13と、3次元地図データを所定の透視投影条件で透視投影して、2次元画像500に変換する座標変換部と、現実世界を撮影した撮影画像Fnを取得する撮影画像取得部と、撮影画像に含まれる路面標識実写画像と、2次元画像に含まれる路面標識投影画像とが一致するように、透視投影条件を修正する透視投影条件修正部と、撮影画像Fnに含まれるビルBLなどの地物の画像を、修正された透視投影条件で透視投影された2次元画像に含まれる地物に対応付けることにより、撮影画像に含まれる地物の画像を3次元地図データにテクスチャマッピングするテクスチャ適用部と、を備える。
【解決手段】地図画像処理装置200は、3次元座標空間で表された3次元地図データを記憶する記憶部D13と、3次元地図データを所定の透視投影条件で透視投影して、2次元画像500に変換する座標変換部と、現実世界を撮影した撮影画像Fnを取得する撮影画像取得部と、撮影画像に含まれる路面標識実写画像と、2次元画像に含まれる路面標識投影画像とが一致するように、透視投影条件を修正する透視投影条件修正部と、撮影画像Fnに含まれるビルBLなどの地物の画像を、修正された透視投影条件で透視投影された2次元画像に含まれる地物に対応付けることにより、撮影画像に含まれる地物の画像を3次元地図データにテクスチャマッピングするテクスチャ適用部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、 地図画像処理装置、地図画像処理方法、および、コンピュータプログラムに関するものである。
【背景技術】
【0002】
コンピュータで利用可能に電子化された2次元地図データを利用して、車両や歩行者に経路案内を行う技術を始めとして、地表上の施設や道路などの情報を電子機器の表示部に表示することは広く行われている。現在は、さらに、3次元座標空間上で地表の状況を再現した3次元地図データの整備も進んでいる(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−346650号公報
【特許文献2】特開2004−126633号公報
【特許文献3】特開2003−111128号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような3次元地図データを、テクスチャマッピングなどの技術を用いてリアルに作成するには、膨大な作業が必要であるという問題があり、3次元地図データの作成を効率良く行う技術が求められている。
【0005】
本発明は、効率の良い3次元地図データの作成を行う技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0007】
[適用例1]地図画像処理装置であって
地図データを記憶する記憶部と、
前記地図データを所定の透視投影条件で透視投影して、2次元画像に変換する座標変換部と、
車両の走行方向の現実世界を撮影した撮影画像を取得する撮影画像取得部と、
前記撮影画像に含まれる路面標識実写画像を認識する路面標識認識部と、
前記路面標識実写画像と、前記透視投影条件を用いて変換された前記2次元画像に含まれる前記路面標識実写画像に対応する路面標識投影画像とを比較し、前記路面標識実写画像と前記路面標識投影画像とが一致するように、前記透視投影条件を修正する透視投影条件修正部と、
を備える、地図画像処理装置。
【0008】
適用例1の地図画像処理装置によれば、地図データを透視投影した2次元画像の透視投影条件を、現実世界を撮影した撮影画像と2次元画像とが路面標識を基準にして重なるように設定している。車両の走行方向の路面標識については、障害物により邪魔されずに撮影可能なタイミングが発生するものなので、効率よく認識することができる。そして、路面標識は、位置が安定して固定されているものなので、地図データを透視投影した2次元画像を撮影画像に対して正確に重ね合わせることが可能となる。
【0009】
[適用例2]適用例1に記載の地図画像処理装置であって、
前記撮影画像に含まれる地物の画像を、修正された前記透視投影条件で透視投影された前記2次元画像に含まれる前記地物に対応付けることにより、前記撮影画像に含まれる地物の画像を前記地図データにテクスチャマッピングするテクスチャ適用部
を備える、地図画像処理装置。
【0010】
[適用例3]適用例1に記載の地図画像処理装置であって、
前記路面標識認識部は、前記撮影画像を解析して前記路面標識実写画像の特徴点を前記撮影画像上に複数設定し、
前記透視投影条件修正部は、前記2次元画像に含まれる前記路面標識投影画像の複数の特徴点と、前記路面標識実写画像の複数の特徴点とが一致するように、前記透視投影条件を修正する、地図画像処理装置。
【0011】
なお、本発明は、種々の形態で実現することが可能であり、例えば、地図画像処理方法と、地図データを作成するためのコンピュータプログラム、当該コンピュータプログラムを記録した記録媒体等の形態で実現することができる。
【図面の簡単な説明】
【0012】
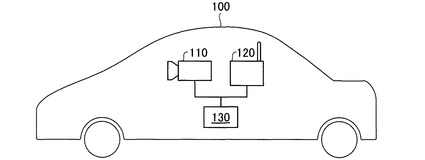
【図1】実施例としての地図画像処理システムの一部を構成する車両100の概略構成を示す説明図である。
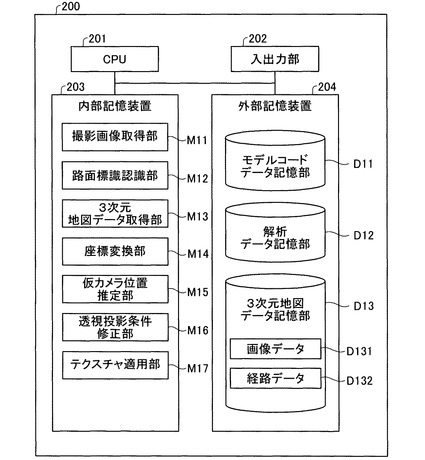
【図2】実施例としての地図画像処理システムの一部を構成する地図画像処理装置の概略構成を示す説明図である。
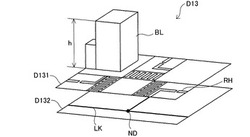
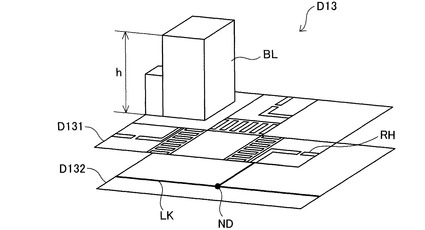
【図3】3次元地図データ記憶部D13に格納された3次元地図データの概要を説明する説明図である。
【図4】透視投影について説明する図である。
【図5】3次元データである画像データD131をある透視投影条件にて2次元画像に変換した画像500を示す図である。
【図6】図5に示す2次元画像が示す場所をほぼ同じ視点から現実に撮影したフレーム画像Fnを示す図である。
【図7】地図画像処理の処理ステップを表すフローチャートである。
【図8】路面標識認識処理の際に前処理として行われる画像処理について説明する第1の図である。
【図9】路面標識認識処理の際に前処理として行われる画像処理について説明する第2の図である。
【図10】路面標識認識処理の際に前処理として行われる画像処理について説明する第3の図である。
【図11】路面標識認識処理の際に前処理として行われる画像処理について説明する第4の図である。
【図12】路面標識認識処理の際に前処理として行われる画像処理について説明する第5の図である。
【図13】形状認識処理について示す第1の図である。
【図14】形状認識処理について示す第2の図である。
【図15】仮カメラ位置推定処理について説明する説明図である。
【図16】透視投影条件の初期値と路面標識の特徴点の設定について説明する図である。
【図17】透視投影条件修正処理について説明する図である。
【図18】図5に示す2次元画像500を最適化処理して図6に示すフレーム画像Fnと重なり合うように調整した画像を示す図である。
【図19】テクスチャ適用処理について説明する図である。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態について、図面を参照しながら、実施例に基づき説明する。
【0014】
A.実施例:
・地図画像処理システムの構成:
図1は、実施例としての地図画像処理システムの一部を構成する車両100の概略構成を示す説明図である。図示するように、車両100は、撮像装置110と、GPS受信機120と、計算機130を備えている。
【0015】
撮像装置110は、例えば、デジタルビデオカメラ、連続撮影可能なデジタルスチルカメラなど、所定の時間間隔でデジタルまたはアナログの画像データを生成できるカメラ装置である。撮像装置110は、計算機130の制御に従って動作可能であると共に、生成した画像データを計算機130に対して送信可能であるように、計算機130と通信可能に接続されている。撮像装置110は、例えば、車両100のフロントウインドウ越しに車両100の前方を撮影するように設置されている。
【0016】
GPS受信機120は、GPS(Global Positioning System/全地球測位システム)を構成する人工衛星から送信された電波を受信する装置である。GPS受信機120は、人工衛星から受信した電波をデジタルデータ(GPS情報)に変換して、計算機130に送信する。
【0017】
計算機130は、ノートパソコンなどの周知のパーソナルコンピュータである。計算機130は、図示しない中央演算装置(CPU)と、RAMやROMなどの内部記憶装置と、ハードディスクなどの外部記憶装置とを備えている。計算機130は、GPS受信機120から取得したGPS情報に基づいて、車両100の現在位置を表す現在位置情報(緯度、経度)を、一定間隔で生成し、車両100の現在位置を常に認識している。車両100はさらに走行距離計やジャイロセンサを搭載し、計算機130による現在位置の認識精度を高めても良い。計算機130は、撮像装置110が撮影したときの現在位置を撮影位置とし、撮像装置110から受信した画像データを、当該画像データが表す撮影画像の撮影位置と関連付けて、外部記憶装置に記憶する。撮影位置は、撮影時刻における車両100の現在位置とされる。
【0018】
車両100に3次元地図データを作成したい経路を走行させながら、撮像装置110による撮影を行うことにより、計算機130に3次元地図データを作成したい経路の撮影画像と現在位置をデータとして蓄積することができる。
【0019】
図2は、実施例としての地図画像処理システムの一部を構成する地図画像処理装置の概略構成を示す説明図である。地図画像処理装置200は、周知のコンピュータであり、CPU201と、入出力部202と、ROMやRAMなどの内部記憶装置203と、ハードディスクなどの外部記憶装置204とを備えている。入出力部202は、外部機器とデータを遣り取りするためのインターフェースであり、上述した計算機130と接続される。この結果、地図画像処理装置200は、計算機130に記憶された撮影画像の画像データと、撮影画像の撮影位置を示す撮影位置情報とを取得できる。
【0020】
内部記憶装置203には、地図画像処理プログラムが格納されており、CPU201が当該プログラムを実行することにより、図2の内部記憶装置203に図示した機能ブロックの機能を実現される。実現される機能ブロックは、撮影画像取得部M11と、路面標識認識部M12と、3次元地図データ取得部M13と、座標変換部M14と、仮カメラ位置推定部M15と、透視投影条件修正部M16と、テクスチャ適用部M17を含む。
【0021】
撮影画像取得部M11は、入出力部202を介して、上述した撮像装置110によって撮影された画像データと画像データに関連付けられた撮影位置情報を取得する。本実施例では、撮像装置110はビデオカメラであり、複数のフレーム画像からなる動画像と、各フレーム画像に関連付けられた撮影位置情報とが取得されるものとする。路面標識認識部M12は、後述するように、一のフレーム画像を解析して所定の路面標識を認識し、当該フレーム画像上に認識された路面標識の特徴点を複数個設定する。3次元地図データ取得部M13は、後述する3次元地図データを3次元地図データ記憶部から取得する。座標変換部M14は、3次元地図データを所定の透視投影条件で透視投影して2次元画像に座標変換を行う。この結果、3次元地図データを所定の視点から見た2次元画像を、ディスプレイなどに表示することができる。仮カメラ位置推定部M15は、フレーム画像に関連付けられた撮影位置情報や、当該フレーム画像の前や後のフレーム画像群に関連付けられた撮影位置情報から、当該フレーム画像の撮影方向や撮影位置を推定する。仮カメラ位置推定部M15は、フレーム画像の撮影方向や撮影位置の推定結果から、フレーム画像と3次元地図データの透視投影条件を仮決めする。透視投影条件修正部M16は、仮決めされた透視投影条件を初期値として後述する最適化処理を行って、最終的に3次元地図データを透視投影した2次元画像と、フレーム画像とが正確に重なり合う透視投影条件に修正する。テクスチャ適用部M17は、フレーム画像に含まれるビルなどの地物の画像を、修正された透視投影条件で透視投影された2次元画像に含まれるビルなどの地物に対応付けることにより、フレーム画像に含まれるビルなどの地物の画像を3次元地図データにテクスチャマッピングする。
【0022】
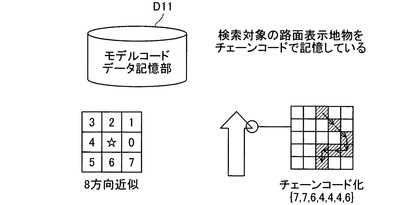
外部記憶装置204は、モデルコードデータ記憶部D11と、解析データ記憶部D12と、3次元地図データ記憶部D13とを備えている。モデルコードデータ記憶部D11には、路面標識の形状をデータ化したモデルチェーンコード(後述)が記憶されている。解析データ記憶部D12には、画像解析による路面標識の認識結果などの解析データが記憶される。3次元地図データ記憶部D13には、後述する3次元座標空間で表された3次元地図データが記憶されている。
【0023】
図3は、3次元地図データ記憶部D13に格納された3次元地図データの概要を説明する説明図である。3次元地図データは、画像データD131と、経路データD132とを含む。画像データD131は、3次元座標空間(X、Y、Z)において、地表の状況を表す3次元データである。画像データD131は、地表の表面を2次元的に表す表面画像は、比較的詳しく描画しており、路面標識RHやビルBLなどの地物の2次元形状などの正確なデータを含んでいる。一方、画像データD131は、高さ方向のデータは比較的詳しくなく、例えば、高さのあるビルBLなどの地物については、ビルBLの高さhの情報程度しか有していない。
【0024】
経路データD132は、地図画像データが表す地図画像の地表の表面に存在する交通経路に関するデータである。経路データD132は、交通経路の地表上における配置を示すネットワークを表すデータである。ネットワークデータは、交通経路における要素点ND(ノードと呼ぶ。)を表すノードデータと、ノード間を結ぶ線分LK(リンクと呼ぶ)を表すリンクデータとを含む。ノードNDは、例えば、交差点、分岐点、終点、始点、駅などの乗降位置などを表している。リンクLKは、例えば、車道、線路、歩行者道などの交通経路を表している。
【0025】
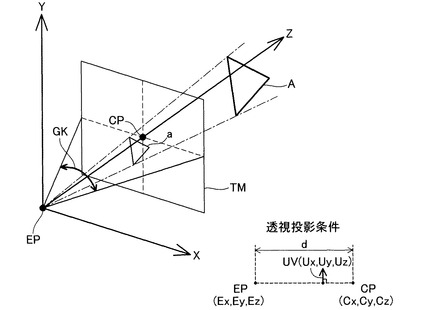
図4は、透視投影について説明する図である。3次元座標空間(X、Y、Z)で表された3次元地図データは、ディスプレイなどに2次元表示するため、2次元座標空間(U、V)に変換される。3次元空間の所定の位置に投影中心EPをおき、その前に投影面TMを置く。3次元図形Aの各点から投影中心に向かって投射線を引く。そうすると、投影面と投射線の交点の集まりとして2次元図形aが形作られる。このような投影法は透視投影と呼ばれている。カメラにて撮影される画像は、一般的に透視投影となる。投影面TMは、所定の長方形の大きさを持ち、この範囲に投影される画像のみが2次元画像として描かれる。投影面TMの大きさはアスペクト比を一定と考えれば、投影中心からの画角GKと、投影中心EPから投影面までの距離dとで決まる。図4では、3次元座標空間(X、Y、Z)の原点に投影中心EPをおき、投影面の中心(投影面中心)CPがZ軸上にある場合を例に図示している。
【0026】
所定の3次元データを投射投影した2次元画像を一義的に定める条件(透視投影条件)は、投影中心EPの座標(Ex、Ey、Ez)と、投影面中心CPの座標(Cx、Xy、Cz)と、画角GKおよび視線方向を軸とした回転成分を表すアップベクトルUV(Ux、Uy、Uz)となる。これらの9つの変数が定まれば、所定の3次元データを投射投影した2次元画像を一義的に定めることができる。
【0027】
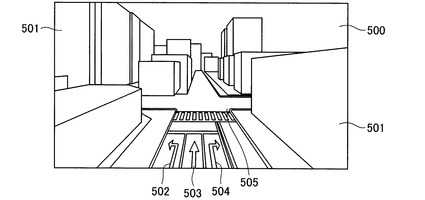
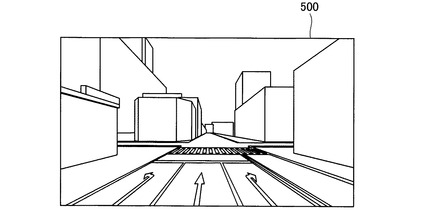
図5は、3次元データである画像データD131をある透視投影条件にて2次元画像に変換した画像500を示す図である。画像500には、ビルなどの建造物501、道路505、道路505上に描かれた路面標識502〜504などが含まれ得る。
【0028】
図6は、図5に示す2次元画像が示す場所を、ほぼ同じ視点から現実に撮影したフレーム画像Fnを示す図である。図5に示す画像500と、フレーム画像Fnとは、完全には視点や画角などが一致しておらず、完全には重なっていない。
【0029】
・地図画像処理装置200の動作:
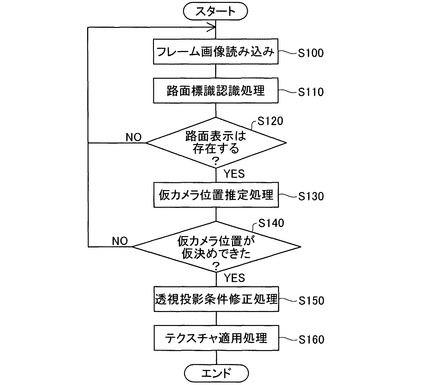
次に、フレーム画像Fnを画像データD131にテクスチャマッピングする地図画像処理について説明する。図7は、地図画像処理の処理ステップを表すフローチャートである。CPU201は、まず、フレーム画像Fnを、フレーム画像Fnの撮影位置、フレーム画像Fnの前のフレーム画像群の撮影位置と共に内部記憶装置203に読み込む(ステップS100)。
【0030】
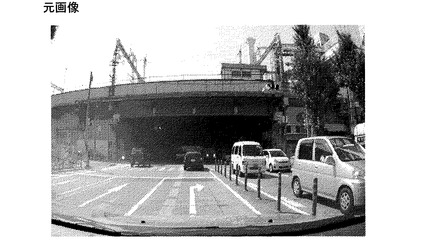
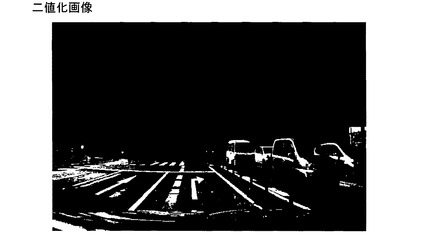
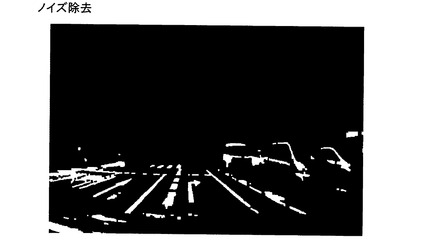
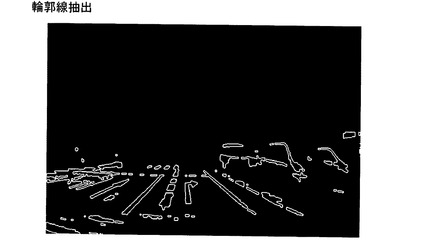
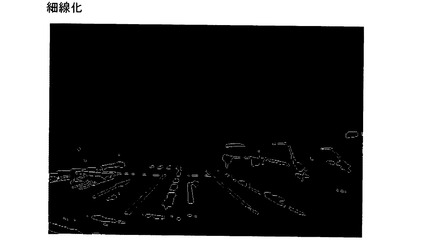
CPU201は、読み込まれたフレーム画像Fnについて路面標識認識処理を実行する(ステップS110)。路面標識認識処理は、フレーム画像Fnに写っている路面標識をフレーム画像Fnの解析により認識する処理である。本実施例では、路面標識として、直進、左折、右折などを示す矢印状の進行方向に関する路面標識の認識を行う。図8〜図12は、路面標識認識処理の際に前処理として行われる画像処理について説明する図である。図8は、画像処理前のフレーム画像Fn(元画像)を表している。CPU201は、まず、フレーム画像Fnを白と黒に2値化する。図9は、2値化処理後のフレーム画像Fnを示している。矢印状の進行方向に関する路面標識は一般的に白色であるので、2値化処理後のフレーム画像Fnにおいて、白色の領域に含まれる。CPU201は、2値化処理後のフレーム画像Fnのノイズ除去処理(図10)、輪郭線抽出処理(図11)を行う。ノイズ除去処理は、周知のノイズ除去フィルタを用いて実行され、輪郭線抽出処理は、周知のエッジ抽出処理により行われる。CPU201は、さらに、輪郭線抽出処理により抽出された輪郭線を細線化する。細線化された線は、全て閉ループとされる(図12)。
【0031】
CPU201は、細線化された各閉ループについて、形状認識処理を行う。図13、図14は、形状認識処理について示す図である。図13に示す8方向近似マトリックスを各閉ループに適用することによって、各閉ループはその形状に応じたチェーンコードに変換される。また、モデルコードデータ記憶部D11には、検索対象の路面標識の形状をチェーンコードで表したモデルデータチェーンコードのデータが記憶されている。
【0032】
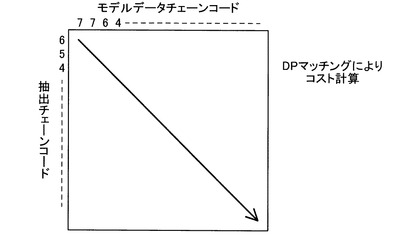
CPU201は、各閉ループのチェーンコード(抽出チェーンコード)と、モデルデータチェーンコードとについて、DPマッチングによるコスト計算を行う(図14)。DPマッチングは、典型的な伸縮マッチング手法であり、両データ間のコスト値が小さいほど両データは近似していると判定され、コスト値が大きいほど両データは近似していないと判断される。CPU201は、抽出チェーンコードとモデルデータチェーンコードとのDPマッチングによるコスト値が所定のしきい値より小さい場合に、抽出チェーンコードに対応する閉ループは、当該モデルデータチェーンコードで表された路面標識であると判断する。
【0033】
路面標識認識処理が終了すると、CPU201は、所望の路面標識がフレーム画像Fn上に存在するか否かを判断する(ステップS120)。ここで、フレーム画像Fnに路面標識がないと判断すると(ステップS120:NO)、CPU201はステップS100に戻り、別のフレーム画像Fnについて、上述の処理を実行する。フレーム画像Fnに路面標識があると判断すると(ステップS120:YES)、CPU201は仮カメラ位置推定処理を実行する(ステップS130)。
【0034】
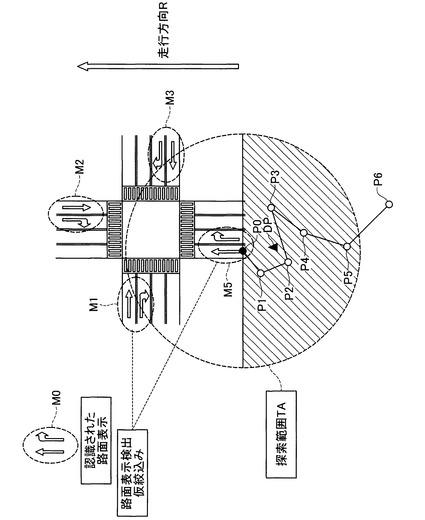
図15は、仮カメラ位置推定処理について説明する説明図である。ここで、フレーム画像Fnにおいて認識された路面標識M0は、図15に示すように、直進の矢印と右折の矢印が組み合わされた路面標識であるとする。CPU201は、3次元の地図の画像データD131において、フレーム画像Fnの撮影位置P0から所定の距離以内の範囲を探索範囲TAとして、路面標識M0と同じ形状の路面標識を検索する。その結果、路面標識M1と、路面標識M3と、路面標識M5が候補として検索される。さらに、CPU201は、フレーム画像Fnの前のフレーム画像群の撮影位置P1〜P6により、撮影位置P0における車両100の走行方向Rを推定する。その結果、CPU201は、フレーム画像Fnにおいて認識された路面標識M0は、3次元の地図の画像データD131における路面標識M5であると判断する。CPU201は、路面標識M5より所定の距離だけ手前の位置DPをフレーム画像Fnが撮影された位置であると仮決めする。
【0035】
仮カメラ位置推定処理が終了すると、CPU201は、カメラ位置が仮決めできたか否かを判断する(ステップS140)。仮決めできないと判断すると(ステップS140:NO)、CPU201は、ステップS100に戻り、別のフレーム画像Fnについて、上述の処理を実行する。仮決めできたと判断すると(ステップS140:YES)、CPU201は、透視投影条件修正処理を実行する(ステップS150)。
【0036】
透視投影条件修正処理では、フレーム画像Fnにおける認識された路面標識M0と、3次元の地図の画像データD131において路面標識M0と対応する路面標識M5の2次元画像TMとが精度良く重なり合うように、投影面TMの透視投影条件を修正する処理である。
【0037】
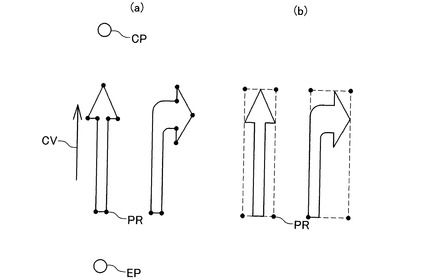
透視投影条件は、上述のとおり、投影中心EPの座標(Ex、Ey、Ez)と、投影面中心の座標CP(Cx、Xy、Cz)と、アップベクトルUV(Ux、Uy、Uz)の9つの値である。図16は、透視投影条件の初期値と、路面標識の特徴点の設定について説明する図である。本実施例では、投影中心EPと投影面中心CPとの距離dは一定値であるという制限と、投影中心EPと投影面中心CPとを結ぶ直線とアップベクトルUVは直行するという制限を設けている。投影中心EPの初期値は、先のステップにおいて、仮決めされたカメラ位置に設定される。投影面中心CPの初期値は、路面標識M5に関連付けられている方向ベクトルCVを用いて定められる。アップベクトルUVの初期値は、撮像装置110の画角を考慮して適切な値に定められる。すなわち、投影面中心CPの初期値は、投影中心EPから方向ベクトルCVの方向に距離dだけ進んだ位置に設定される。また、路面標識M5の特徴点PR(PRx、PRy、PRz)は、図16(a)に示すように、例えば、路面標識M5の各頂点に設定される。あるいは、路面標識M5の特徴点PRは、図16(b)に示すように、路面標識M5に外接する長方形の各頂点に設定されても良い。
【0038】
図示は省略するが、フレーム画像Fnにおいて認識された路面標識M0についても、路面標識M5に設定された特徴点PRと対応する位置にそれぞれ特徴点FP(Uc、Vc)が設定される。
【0039】
図17は、透視投影条件修正処理について説明する図である。まず、CPU201は、路面標識M5の特徴点PR(PRx、PRy、PRz)を、設定された透視投影条件で透視投影された2次元画像上の座標VP(Ur、Vr)に変換する。CPU201は、次に、2次元画像上の特徴点VP(Ur、Vr)と、対応するフレーム画像Fnの特徴点FP(Uc、Vc)との距離の各特徴点についての和Sを算出する。算出式は、以下の式(1)で表される。
【数1】

【0040】
式1において、iは、各特徴点を識別する識別子であり、Nは、特徴点の数である。透視投影条件修正処理は、数1で求められた和Sを最小にする透視投影条件を求める最適化問題に帰着する。最適化処理には、透視投影条件を少しずつ変化させながら和Sを最小にする透視投影条件を求める各種の最適化アルゴリズムが用いられ得るが、本実施例では、周知のシミュレーティドアニーリング法(焼きなまし法)を用いることとする。
【0041】
最終的に透視投影条件が修正されると、フレーム画像Fnと、3次元の地図の画像データD131を透視投影した2次元画像が、画像全体で正確に重なり合う。図18は、図5に示す2次元画像500を最適化処理して、図6に示すフレーム画像Fnと重なり合うように調整した画像を示す図である。図18と図6のように、透視投影条件設定処理によって、3次元の地図の画像データD131を透視投影した2次元画像と、フレーム画像Fnとが、正確に重なり合うことがわかる。
【0042】
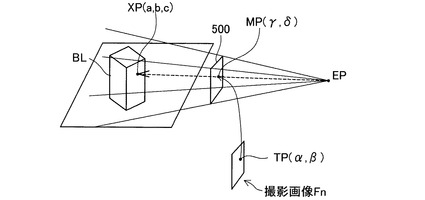
透視投影条件設定処理が終了すると、CPU201は、テクスチャ適用処理を実行する(ステップS160)。テクスチャ適用処理は、フレーム画像Fnに含まれるビルBLなどの地物のリアルな画像を、ステップS150で修正された透視投影条件で透視投影された2次元画像に含まれる対応する地物に対応付けることにより、フレーム画像Fnに含まれるビルBLの壁面などの地物のリアルな画像を3次元の地図の画像データD131にマッピングする処理である。図19は、テクスチャ適用処理について説明する図である。フレーム画像Fn上の画素TPの画素値(RGB値、HSV値など)を、画素TPと対応する2次元画像500上の座標MPに対応付ける。フレーム画像Fnと2次元画像500とは、透視投影条件設定処理によって、正しく重なり合うように対応付けられているので、フレーム画像Fn上の画素TPを対応付ける2次元画像500上の座標MPを求めることは容易である。フレーム画像Fn上の画素TPの画素値は、ステップS150で修正された透視投影条件で逆変換した3次元の地図上の座標XP(a、b、c)に最終的に対応付け(マッピング)される。
【0043】
以上説明した実施例によれば、3次元地図データを透視投影した2次元画像の透視投影条件を、現実世界を撮影した撮影画像と2次元画像とが路面標識を基準にして重なるように設定している。車両の走行方向の路面標識については、障害物により邪魔されずに撮影可能なタイミングが発生するものなので、効率よく認識することができる。そして、路面標識は、位置が安定して固定されているものなので、3次元地図データを透視投影した2次元画像を撮影画像に対して正確に重ね合わせることが可能となる。また、3次元の地図の画像データD131を透視投影した2次元画像上の路面標識が、撮影画像の対応する路面標識と精度良く重なるように、透視投影条件を求めたうえで、撮影画像の内容を3次元の地図の画像データD131にマッピングするので、自動的に精度良く、3次元の地図の画像データD131にテクスチャマッピングを実行できる。さらに、現在、正確で充実したデータが存在する路面標識を用いて、透視投影条件を求めるので、多くの交差点付近の3次元の地図の画像データD131を充実させることができる。
【0044】
B.変形例
・第1変形例:
上記実施例では、進行方向に関する路面標識を用いて、透視投影した2次元画像と撮影画像とを重ね合わせたが、他の路面標識を用いても良い。他の路面標識は、3次元の地図の画像データD131において、正確な位置データが用意されているものが好ましく、一般には、地表上に2次元的に描かれている地物が好ましい。例えば、最高速度に関する標識、車両通行区分に関する標識、横断歩道又は自転車横断帯があることを示す標識等を用いることができる。
【0045】
・第2変形例:
上記実施例において、ハードウェアによって実現されていた構成の一部をソフトウェアに置き換えるようにしてもよく、逆に、ソフトウェアによって実現されていた構成の一部をハードウェアに置き換えるようにしても良い。
【0046】
・第3変形例
上記実施例では、テクスチャマッピングに利用しているが、カメラ装置を搭載した車両について、透視投影条件を設定した2次元画像を運転席近傍のディスプレイに表示してナビゲーションに利用してもよい。本発明においては、車両の位置と2次元画像の投影中心とをほぼ一致させることができるので、例えば、車両がいずれのレーンに位置しているかを把握するナビゲーションを行なうことも可能になる。
【0047】
・第4変形例
上記実施例では、3次元地図データを透視投影して2次元画像に変換しているが、2次元地図データを透視投影して、特定の角度からの俯瞰図としての2次元画像に変換してもよい。この2次元画像を利用して撮影画像の地物の画像をテクスチャマッピングする場合は、撮影画像の地物の画像を基に輪郭線を抽出し、透視投影条件で逆変換して3次元のワイヤーフレームを生成して3次元地図データを作成することも可能である。
【0048】
以上、本発明の実施例および変形例について説明したが、本発明はこれらの実施例および変形例になんら限定されるものではなく、その要旨を逸脱しない範囲内において種々の態様での実施が可能である。
【符号の説明】
【0049】
100…車両、110…撮像装置、120…GPS受信機、130…計算機、200…地図画像処理装置、201…CPU、202…入出力部、203…内部記憶装置、204…外部記憶装置
【技術分野】
【0001】
本発明は、 地図画像処理装置、地図画像処理方法、および、コンピュータプログラムに関するものである。
【背景技術】
【0002】
コンピュータで利用可能に電子化された2次元地図データを利用して、車両や歩行者に経路案内を行う技術を始めとして、地表上の施設や道路などの情報を電子機器の表示部に表示することは広く行われている。現在は、さらに、3次元座標空間上で地表の状況を再現した3次元地図データの整備も進んでいる(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−346650号公報
【特許文献2】特開2004−126633号公報
【特許文献3】特開2003−111128号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような3次元地図データを、テクスチャマッピングなどの技術を用いてリアルに作成するには、膨大な作業が必要であるという問題があり、3次元地図データの作成を効率良く行う技術が求められている。
【0005】
本発明は、効率の良い3次元地図データの作成を行う技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0007】
[適用例1]地図画像処理装置であって
地図データを記憶する記憶部と、
前記地図データを所定の透視投影条件で透視投影して、2次元画像に変換する座標変換部と、
車両の走行方向の現実世界を撮影した撮影画像を取得する撮影画像取得部と、
前記撮影画像に含まれる路面標識実写画像を認識する路面標識認識部と、
前記路面標識実写画像と、前記透視投影条件を用いて変換された前記2次元画像に含まれる前記路面標識実写画像に対応する路面標識投影画像とを比較し、前記路面標識実写画像と前記路面標識投影画像とが一致するように、前記透視投影条件を修正する透視投影条件修正部と、
を備える、地図画像処理装置。
【0008】
適用例1の地図画像処理装置によれば、地図データを透視投影した2次元画像の透視投影条件を、現実世界を撮影した撮影画像と2次元画像とが路面標識を基準にして重なるように設定している。車両の走行方向の路面標識については、障害物により邪魔されずに撮影可能なタイミングが発生するものなので、効率よく認識することができる。そして、路面標識は、位置が安定して固定されているものなので、地図データを透視投影した2次元画像を撮影画像に対して正確に重ね合わせることが可能となる。
【0009】
[適用例2]適用例1に記載の地図画像処理装置であって、
前記撮影画像に含まれる地物の画像を、修正された前記透視投影条件で透視投影された前記2次元画像に含まれる前記地物に対応付けることにより、前記撮影画像に含まれる地物の画像を前記地図データにテクスチャマッピングするテクスチャ適用部
を備える、地図画像処理装置。
【0010】
[適用例3]適用例1に記載の地図画像処理装置であって、
前記路面標識認識部は、前記撮影画像を解析して前記路面標識実写画像の特徴点を前記撮影画像上に複数設定し、
前記透視投影条件修正部は、前記2次元画像に含まれる前記路面標識投影画像の複数の特徴点と、前記路面標識実写画像の複数の特徴点とが一致するように、前記透視投影条件を修正する、地図画像処理装置。
【0011】
なお、本発明は、種々の形態で実現することが可能であり、例えば、地図画像処理方法と、地図データを作成するためのコンピュータプログラム、当該コンピュータプログラムを記録した記録媒体等の形態で実現することができる。
【図面の簡単な説明】
【0012】
【図1】実施例としての地図画像処理システムの一部を構成する車両100の概略構成を示す説明図である。
【図2】実施例としての地図画像処理システムの一部を構成する地図画像処理装置の概略構成を示す説明図である。
【図3】3次元地図データ記憶部D13に格納された3次元地図データの概要を説明する説明図である。
【図4】透視投影について説明する図である。
【図5】3次元データである画像データD131をある透視投影条件にて2次元画像に変換した画像500を示す図である。
【図6】図5に示す2次元画像が示す場所をほぼ同じ視点から現実に撮影したフレーム画像Fnを示す図である。
【図7】地図画像処理の処理ステップを表すフローチャートである。
【図8】路面標識認識処理の際に前処理として行われる画像処理について説明する第1の図である。
【図9】路面標識認識処理の際に前処理として行われる画像処理について説明する第2の図である。
【図10】路面標識認識処理の際に前処理として行われる画像処理について説明する第3の図である。
【図11】路面標識認識処理の際に前処理として行われる画像処理について説明する第4の図である。
【図12】路面標識認識処理の際に前処理として行われる画像処理について説明する第5の図である。
【図13】形状認識処理について示す第1の図である。
【図14】形状認識処理について示す第2の図である。
【図15】仮カメラ位置推定処理について説明する説明図である。
【図16】透視投影条件の初期値と路面標識の特徴点の設定について説明する図である。
【図17】透視投影条件修正処理について説明する図である。
【図18】図5に示す2次元画像500を最適化処理して図6に示すフレーム画像Fnと重なり合うように調整した画像を示す図である。
【図19】テクスチャ適用処理について説明する図である。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態について、図面を参照しながら、実施例に基づき説明する。
【0014】
A.実施例:
・地図画像処理システムの構成:
図1は、実施例としての地図画像処理システムの一部を構成する車両100の概略構成を示す説明図である。図示するように、車両100は、撮像装置110と、GPS受信機120と、計算機130を備えている。
【0015】
撮像装置110は、例えば、デジタルビデオカメラ、連続撮影可能なデジタルスチルカメラなど、所定の時間間隔でデジタルまたはアナログの画像データを生成できるカメラ装置である。撮像装置110は、計算機130の制御に従って動作可能であると共に、生成した画像データを計算機130に対して送信可能であるように、計算機130と通信可能に接続されている。撮像装置110は、例えば、車両100のフロントウインドウ越しに車両100の前方を撮影するように設置されている。
【0016】
GPS受信機120は、GPS(Global Positioning System/全地球測位システム)を構成する人工衛星から送信された電波を受信する装置である。GPS受信機120は、人工衛星から受信した電波をデジタルデータ(GPS情報)に変換して、計算機130に送信する。
【0017】
計算機130は、ノートパソコンなどの周知のパーソナルコンピュータである。計算機130は、図示しない中央演算装置(CPU)と、RAMやROMなどの内部記憶装置と、ハードディスクなどの外部記憶装置とを備えている。計算機130は、GPS受信機120から取得したGPS情報に基づいて、車両100の現在位置を表す現在位置情報(緯度、経度)を、一定間隔で生成し、車両100の現在位置を常に認識している。車両100はさらに走行距離計やジャイロセンサを搭載し、計算機130による現在位置の認識精度を高めても良い。計算機130は、撮像装置110が撮影したときの現在位置を撮影位置とし、撮像装置110から受信した画像データを、当該画像データが表す撮影画像の撮影位置と関連付けて、外部記憶装置に記憶する。撮影位置は、撮影時刻における車両100の現在位置とされる。
【0018】
車両100に3次元地図データを作成したい経路を走行させながら、撮像装置110による撮影を行うことにより、計算機130に3次元地図データを作成したい経路の撮影画像と現在位置をデータとして蓄積することができる。
【0019】
図2は、実施例としての地図画像処理システムの一部を構成する地図画像処理装置の概略構成を示す説明図である。地図画像処理装置200は、周知のコンピュータであり、CPU201と、入出力部202と、ROMやRAMなどの内部記憶装置203と、ハードディスクなどの外部記憶装置204とを備えている。入出力部202は、外部機器とデータを遣り取りするためのインターフェースであり、上述した計算機130と接続される。この結果、地図画像処理装置200は、計算機130に記憶された撮影画像の画像データと、撮影画像の撮影位置を示す撮影位置情報とを取得できる。
【0020】
内部記憶装置203には、地図画像処理プログラムが格納されており、CPU201が当該プログラムを実行することにより、図2の内部記憶装置203に図示した機能ブロックの機能を実現される。実現される機能ブロックは、撮影画像取得部M11と、路面標識認識部M12と、3次元地図データ取得部M13と、座標変換部M14と、仮カメラ位置推定部M15と、透視投影条件修正部M16と、テクスチャ適用部M17を含む。
【0021】
撮影画像取得部M11は、入出力部202を介して、上述した撮像装置110によって撮影された画像データと画像データに関連付けられた撮影位置情報を取得する。本実施例では、撮像装置110はビデオカメラであり、複数のフレーム画像からなる動画像と、各フレーム画像に関連付けられた撮影位置情報とが取得されるものとする。路面標識認識部M12は、後述するように、一のフレーム画像を解析して所定の路面標識を認識し、当該フレーム画像上に認識された路面標識の特徴点を複数個設定する。3次元地図データ取得部M13は、後述する3次元地図データを3次元地図データ記憶部から取得する。座標変換部M14は、3次元地図データを所定の透視投影条件で透視投影して2次元画像に座標変換を行う。この結果、3次元地図データを所定の視点から見た2次元画像を、ディスプレイなどに表示することができる。仮カメラ位置推定部M15は、フレーム画像に関連付けられた撮影位置情報や、当該フレーム画像の前や後のフレーム画像群に関連付けられた撮影位置情報から、当該フレーム画像の撮影方向や撮影位置を推定する。仮カメラ位置推定部M15は、フレーム画像の撮影方向や撮影位置の推定結果から、フレーム画像と3次元地図データの透視投影条件を仮決めする。透視投影条件修正部M16は、仮決めされた透視投影条件を初期値として後述する最適化処理を行って、最終的に3次元地図データを透視投影した2次元画像と、フレーム画像とが正確に重なり合う透視投影条件に修正する。テクスチャ適用部M17は、フレーム画像に含まれるビルなどの地物の画像を、修正された透視投影条件で透視投影された2次元画像に含まれるビルなどの地物に対応付けることにより、フレーム画像に含まれるビルなどの地物の画像を3次元地図データにテクスチャマッピングする。
【0022】
外部記憶装置204は、モデルコードデータ記憶部D11と、解析データ記憶部D12と、3次元地図データ記憶部D13とを備えている。モデルコードデータ記憶部D11には、路面標識の形状をデータ化したモデルチェーンコード(後述)が記憶されている。解析データ記憶部D12には、画像解析による路面標識の認識結果などの解析データが記憶される。3次元地図データ記憶部D13には、後述する3次元座標空間で表された3次元地図データが記憶されている。
【0023】
図3は、3次元地図データ記憶部D13に格納された3次元地図データの概要を説明する説明図である。3次元地図データは、画像データD131と、経路データD132とを含む。画像データD131は、3次元座標空間(X、Y、Z)において、地表の状況を表す3次元データである。画像データD131は、地表の表面を2次元的に表す表面画像は、比較的詳しく描画しており、路面標識RHやビルBLなどの地物の2次元形状などの正確なデータを含んでいる。一方、画像データD131は、高さ方向のデータは比較的詳しくなく、例えば、高さのあるビルBLなどの地物については、ビルBLの高さhの情報程度しか有していない。
【0024】
経路データD132は、地図画像データが表す地図画像の地表の表面に存在する交通経路に関するデータである。経路データD132は、交通経路の地表上における配置を示すネットワークを表すデータである。ネットワークデータは、交通経路における要素点ND(ノードと呼ぶ。)を表すノードデータと、ノード間を結ぶ線分LK(リンクと呼ぶ)を表すリンクデータとを含む。ノードNDは、例えば、交差点、分岐点、終点、始点、駅などの乗降位置などを表している。リンクLKは、例えば、車道、線路、歩行者道などの交通経路を表している。
【0025】
図4は、透視投影について説明する図である。3次元座標空間(X、Y、Z)で表された3次元地図データは、ディスプレイなどに2次元表示するため、2次元座標空間(U、V)に変換される。3次元空間の所定の位置に投影中心EPをおき、その前に投影面TMを置く。3次元図形Aの各点から投影中心に向かって投射線を引く。そうすると、投影面と投射線の交点の集まりとして2次元図形aが形作られる。このような投影法は透視投影と呼ばれている。カメラにて撮影される画像は、一般的に透視投影となる。投影面TMは、所定の長方形の大きさを持ち、この範囲に投影される画像のみが2次元画像として描かれる。投影面TMの大きさはアスペクト比を一定と考えれば、投影中心からの画角GKと、投影中心EPから投影面までの距離dとで決まる。図4では、3次元座標空間(X、Y、Z)の原点に投影中心EPをおき、投影面の中心(投影面中心)CPがZ軸上にある場合を例に図示している。
【0026】
所定の3次元データを投射投影した2次元画像を一義的に定める条件(透視投影条件)は、投影中心EPの座標(Ex、Ey、Ez)と、投影面中心CPの座標(Cx、Xy、Cz)と、画角GKおよび視線方向を軸とした回転成分を表すアップベクトルUV(Ux、Uy、Uz)となる。これらの9つの変数が定まれば、所定の3次元データを投射投影した2次元画像を一義的に定めることができる。
【0027】
図5は、3次元データである画像データD131をある透視投影条件にて2次元画像に変換した画像500を示す図である。画像500には、ビルなどの建造物501、道路505、道路505上に描かれた路面標識502〜504などが含まれ得る。
【0028】
図6は、図5に示す2次元画像が示す場所を、ほぼ同じ視点から現実に撮影したフレーム画像Fnを示す図である。図5に示す画像500と、フレーム画像Fnとは、完全には視点や画角などが一致しておらず、完全には重なっていない。
【0029】
・地図画像処理装置200の動作:
次に、フレーム画像Fnを画像データD131にテクスチャマッピングする地図画像処理について説明する。図7は、地図画像処理の処理ステップを表すフローチャートである。CPU201は、まず、フレーム画像Fnを、フレーム画像Fnの撮影位置、フレーム画像Fnの前のフレーム画像群の撮影位置と共に内部記憶装置203に読み込む(ステップS100)。
【0030】
CPU201は、読み込まれたフレーム画像Fnについて路面標識認識処理を実行する(ステップS110)。路面標識認識処理は、フレーム画像Fnに写っている路面標識をフレーム画像Fnの解析により認識する処理である。本実施例では、路面標識として、直進、左折、右折などを示す矢印状の進行方向に関する路面標識の認識を行う。図8〜図12は、路面標識認識処理の際に前処理として行われる画像処理について説明する図である。図8は、画像処理前のフレーム画像Fn(元画像)を表している。CPU201は、まず、フレーム画像Fnを白と黒に2値化する。図9は、2値化処理後のフレーム画像Fnを示している。矢印状の進行方向に関する路面標識は一般的に白色であるので、2値化処理後のフレーム画像Fnにおいて、白色の領域に含まれる。CPU201は、2値化処理後のフレーム画像Fnのノイズ除去処理(図10)、輪郭線抽出処理(図11)を行う。ノイズ除去処理は、周知のノイズ除去フィルタを用いて実行され、輪郭線抽出処理は、周知のエッジ抽出処理により行われる。CPU201は、さらに、輪郭線抽出処理により抽出された輪郭線を細線化する。細線化された線は、全て閉ループとされる(図12)。
【0031】
CPU201は、細線化された各閉ループについて、形状認識処理を行う。図13、図14は、形状認識処理について示す図である。図13に示す8方向近似マトリックスを各閉ループに適用することによって、各閉ループはその形状に応じたチェーンコードに変換される。また、モデルコードデータ記憶部D11には、検索対象の路面標識の形状をチェーンコードで表したモデルデータチェーンコードのデータが記憶されている。
【0032】
CPU201は、各閉ループのチェーンコード(抽出チェーンコード)と、モデルデータチェーンコードとについて、DPマッチングによるコスト計算を行う(図14)。DPマッチングは、典型的な伸縮マッチング手法であり、両データ間のコスト値が小さいほど両データは近似していると判定され、コスト値が大きいほど両データは近似していないと判断される。CPU201は、抽出チェーンコードとモデルデータチェーンコードとのDPマッチングによるコスト値が所定のしきい値より小さい場合に、抽出チェーンコードに対応する閉ループは、当該モデルデータチェーンコードで表された路面標識であると判断する。
【0033】
路面標識認識処理が終了すると、CPU201は、所望の路面標識がフレーム画像Fn上に存在するか否かを判断する(ステップS120)。ここで、フレーム画像Fnに路面標識がないと判断すると(ステップS120:NO)、CPU201はステップS100に戻り、別のフレーム画像Fnについて、上述の処理を実行する。フレーム画像Fnに路面標識があると判断すると(ステップS120:YES)、CPU201は仮カメラ位置推定処理を実行する(ステップS130)。
【0034】
図15は、仮カメラ位置推定処理について説明する説明図である。ここで、フレーム画像Fnにおいて認識された路面標識M0は、図15に示すように、直進の矢印と右折の矢印が組み合わされた路面標識であるとする。CPU201は、3次元の地図の画像データD131において、フレーム画像Fnの撮影位置P0から所定の距離以内の範囲を探索範囲TAとして、路面標識M0と同じ形状の路面標識を検索する。その結果、路面標識M1と、路面標識M3と、路面標識M5が候補として検索される。さらに、CPU201は、フレーム画像Fnの前のフレーム画像群の撮影位置P1〜P6により、撮影位置P0における車両100の走行方向Rを推定する。その結果、CPU201は、フレーム画像Fnにおいて認識された路面標識M0は、3次元の地図の画像データD131における路面標識M5であると判断する。CPU201は、路面標識M5より所定の距離だけ手前の位置DPをフレーム画像Fnが撮影された位置であると仮決めする。
【0035】
仮カメラ位置推定処理が終了すると、CPU201は、カメラ位置が仮決めできたか否かを判断する(ステップS140)。仮決めできないと判断すると(ステップS140:NO)、CPU201は、ステップS100に戻り、別のフレーム画像Fnについて、上述の処理を実行する。仮決めできたと判断すると(ステップS140:YES)、CPU201は、透視投影条件修正処理を実行する(ステップS150)。
【0036】
透視投影条件修正処理では、フレーム画像Fnにおける認識された路面標識M0と、3次元の地図の画像データD131において路面標識M0と対応する路面標識M5の2次元画像TMとが精度良く重なり合うように、投影面TMの透視投影条件を修正する処理である。
【0037】
透視投影条件は、上述のとおり、投影中心EPの座標(Ex、Ey、Ez)と、投影面中心の座標CP(Cx、Xy、Cz)と、アップベクトルUV(Ux、Uy、Uz)の9つの値である。図16は、透視投影条件の初期値と、路面標識の特徴点の設定について説明する図である。本実施例では、投影中心EPと投影面中心CPとの距離dは一定値であるという制限と、投影中心EPと投影面中心CPとを結ぶ直線とアップベクトルUVは直行するという制限を設けている。投影中心EPの初期値は、先のステップにおいて、仮決めされたカメラ位置に設定される。投影面中心CPの初期値は、路面標識M5に関連付けられている方向ベクトルCVを用いて定められる。アップベクトルUVの初期値は、撮像装置110の画角を考慮して適切な値に定められる。すなわち、投影面中心CPの初期値は、投影中心EPから方向ベクトルCVの方向に距離dだけ進んだ位置に設定される。また、路面標識M5の特徴点PR(PRx、PRy、PRz)は、図16(a)に示すように、例えば、路面標識M5の各頂点に設定される。あるいは、路面標識M5の特徴点PRは、図16(b)に示すように、路面標識M5に外接する長方形の各頂点に設定されても良い。
【0038】
図示は省略するが、フレーム画像Fnにおいて認識された路面標識M0についても、路面標識M5に設定された特徴点PRと対応する位置にそれぞれ特徴点FP(Uc、Vc)が設定される。
【0039】
図17は、透視投影条件修正処理について説明する図である。まず、CPU201は、路面標識M5の特徴点PR(PRx、PRy、PRz)を、設定された透視投影条件で透視投影された2次元画像上の座標VP(Ur、Vr)に変換する。CPU201は、次に、2次元画像上の特徴点VP(Ur、Vr)と、対応するフレーム画像Fnの特徴点FP(Uc、Vc)との距離の各特徴点についての和Sを算出する。算出式は、以下の式(1)で表される。
【数1】
【0040】
式1において、iは、各特徴点を識別する識別子であり、Nは、特徴点の数である。透視投影条件修正処理は、数1で求められた和Sを最小にする透視投影条件を求める最適化問題に帰着する。最適化処理には、透視投影条件を少しずつ変化させながら和Sを最小にする透視投影条件を求める各種の最適化アルゴリズムが用いられ得るが、本実施例では、周知のシミュレーティドアニーリング法(焼きなまし法)を用いることとする。
【0041】
最終的に透視投影条件が修正されると、フレーム画像Fnと、3次元の地図の画像データD131を透視投影した2次元画像が、画像全体で正確に重なり合う。図18は、図5に示す2次元画像500を最適化処理して、図6に示すフレーム画像Fnと重なり合うように調整した画像を示す図である。図18と図6のように、透視投影条件設定処理によって、3次元の地図の画像データD131を透視投影した2次元画像と、フレーム画像Fnとが、正確に重なり合うことがわかる。
【0042】
透視投影条件設定処理が終了すると、CPU201は、テクスチャ適用処理を実行する(ステップS160)。テクスチャ適用処理は、フレーム画像Fnに含まれるビルBLなどの地物のリアルな画像を、ステップS150で修正された透視投影条件で透視投影された2次元画像に含まれる対応する地物に対応付けることにより、フレーム画像Fnに含まれるビルBLの壁面などの地物のリアルな画像を3次元の地図の画像データD131にマッピングする処理である。図19は、テクスチャ適用処理について説明する図である。フレーム画像Fn上の画素TPの画素値(RGB値、HSV値など)を、画素TPと対応する2次元画像500上の座標MPに対応付ける。フレーム画像Fnと2次元画像500とは、透視投影条件設定処理によって、正しく重なり合うように対応付けられているので、フレーム画像Fn上の画素TPを対応付ける2次元画像500上の座標MPを求めることは容易である。フレーム画像Fn上の画素TPの画素値は、ステップS150で修正された透視投影条件で逆変換した3次元の地図上の座標XP(a、b、c)に最終的に対応付け(マッピング)される。
【0043】
以上説明した実施例によれば、3次元地図データを透視投影した2次元画像の透視投影条件を、現実世界を撮影した撮影画像と2次元画像とが路面標識を基準にして重なるように設定している。車両の走行方向の路面標識については、障害物により邪魔されずに撮影可能なタイミングが発生するものなので、効率よく認識することができる。そして、路面標識は、位置が安定して固定されているものなので、3次元地図データを透視投影した2次元画像を撮影画像に対して正確に重ね合わせることが可能となる。また、3次元の地図の画像データD131を透視投影した2次元画像上の路面標識が、撮影画像の対応する路面標識と精度良く重なるように、透視投影条件を求めたうえで、撮影画像の内容を3次元の地図の画像データD131にマッピングするので、自動的に精度良く、3次元の地図の画像データD131にテクスチャマッピングを実行できる。さらに、現在、正確で充実したデータが存在する路面標識を用いて、透視投影条件を求めるので、多くの交差点付近の3次元の地図の画像データD131を充実させることができる。
【0044】
B.変形例
・第1変形例:
上記実施例では、進行方向に関する路面標識を用いて、透視投影した2次元画像と撮影画像とを重ね合わせたが、他の路面標識を用いても良い。他の路面標識は、3次元の地図の画像データD131において、正確な位置データが用意されているものが好ましく、一般には、地表上に2次元的に描かれている地物が好ましい。例えば、最高速度に関する標識、車両通行区分に関する標識、横断歩道又は自転車横断帯があることを示す標識等を用いることができる。
【0045】
・第2変形例:
上記実施例において、ハードウェアによって実現されていた構成の一部をソフトウェアに置き換えるようにしてもよく、逆に、ソフトウェアによって実現されていた構成の一部をハードウェアに置き換えるようにしても良い。
【0046】
・第3変形例
上記実施例では、テクスチャマッピングに利用しているが、カメラ装置を搭載した車両について、透視投影条件を設定した2次元画像を運転席近傍のディスプレイに表示してナビゲーションに利用してもよい。本発明においては、車両の位置と2次元画像の投影中心とをほぼ一致させることができるので、例えば、車両がいずれのレーンに位置しているかを把握するナビゲーションを行なうことも可能になる。
【0047】
・第4変形例
上記実施例では、3次元地図データを透視投影して2次元画像に変換しているが、2次元地図データを透視投影して、特定の角度からの俯瞰図としての2次元画像に変換してもよい。この2次元画像を利用して撮影画像の地物の画像をテクスチャマッピングする場合は、撮影画像の地物の画像を基に輪郭線を抽出し、透視投影条件で逆変換して3次元のワイヤーフレームを生成して3次元地図データを作成することも可能である。
【0048】
以上、本発明の実施例および変形例について説明したが、本発明はこれらの実施例および変形例になんら限定されるものではなく、その要旨を逸脱しない範囲内において種々の態様での実施が可能である。
【符号の説明】
【0049】
100…車両、110…撮像装置、120…GPS受信機、130…計算機、200…地図画像処理装置、201…CPU、202…入出力部、203…内部記憶装置、204…外部記憶装置
【特許請求の範囲】
【請求項1】
地図画像処理装置であって
地図データを記憶する記憶部と、
前記地図データを所定の透視投影条件で透視投影して、2次元画像に変換する座標変換部と、
車両の走行方向の現実世界を撮影した撮影画像を取得する撮影画像取得部と、
前記撮影画像に含まれる路面標識実写画像を認識する路面標識認識部と、
前記路面標識実写画像と、前記透視投影条件を用いて変換された前記2次元画像に含まれる前記路面標識実写画像に対応する路面標識投影画像とを比較し、前記路面標識実写画像と前記路面標識投影画像とが一致するように、前記透視投影条件を修正する透視投影条件修正部と、
を備える、地図画像処理装置。
【請求項2】
請求項1に記載の地図画像処理装置であって、
前記路面標識認識部は、前記撮影画像を解析して前記路面標識実写画像の特徴点を前記撮影画像上に複数設定し、
前記透視投影条件修正部は、前記2次元画像に含まれる前記路面標識投影画像の複数の特徴点と、前記路面標識実写画像の複数の特徴点とが一致するように、前記透視投影条件を修正する、地図画像処理装置。
【請求項3】
請求項1に記載の地図画像処理装置であって、
前記撮影画像に含まれる地物の画像を、修正された前記透視投影条件で透視投影された前記2次元画像に含まれる前記地物に対応付けることにより、前記撮影画像に含まれる地物の画像を前記地図データにテクスチャマッピングするテクスチャ適用部
を備える、地図画像処理装置。
【請求項4】
地図データを記憶する記憶部を有する情報処理装置を用いた地図生成方法であって、
前記地図データを所定の透視投影条件で透視投影して、2次元画像に変換し、
車両の走行方向の現実世界を撮影した撮影画像を取得し、
前記撮影画像に含まれる路面標識実写画像を認識し、
前記路面標識実写画像と、前記透視投影条件を用いて変換された前記2次元画像に含まれる前記路面標識実写画像に対応する路面標識投影画像とを比較し、前記路面標識実写画像と前記路面標識投影画像とが一致するように、前記透視投影条件を修正する、地図画像処理方法。
【請求項5】
地図データを記憶する記憶部を有する情報処理装置に地図画像処理するコンピュータプログラムであって、
前記地図データを所定の透視投影条件で透視投影して、2次元画像に変換する座標変換機能と、
車両の走行方向の現実世界を撮影した撮影画像を取得する撮影画像取得機能と、
前記撮影画像に含まれる路面標識実写画像を認識する路面標識認識機能と、
前記路面標識実写画像と、前記透視投影条件を用いて変換された前記2次元画像に含まれる前記路面標識実写画像に対応する路面標識投影画像とを比較し、前記路面標識実写画像と前記路面標識投影画像とが一致するように、前記透視投影条件を修正する透視投影条件修正機能と、
を前記情報処理装置のコンピュータに実現させる、コンピュータプログラム。
【請求項1】
地図画像処理装置であって
地図データを記憶する記憶部と、
前記地図データを所定の透視投影条件で透視投影して、2次元画像に変換する座標変換部と、
車両の走行方向の現実世界を撮影した撮影画像を取得する撮影画像取得部と、
前記撮影画像に含まれる路面標識実写画像を認識する路面標識認識部と、
前記路面標識実写画像と、前記透視投影条件を用いて変換された前記2次元画像に含まれる前記路面標識実写画像に対応する路面標識投影画像とを比較し、前記路面標識実写画像と前記路面標識投影画像とが一致するように、前記透視投影条件を修正する透視投影条件修正部と、
を備える、地図画像処理装置。
【請求項2】
請求項1に記載の地図画像処理装置であって、
前記路面標識認識部は、前記撮影画像を解析して前記路面標識実写画像の特徴点を前記撮影画像上に複数設定し、
前記透視投影条件修正部は、前記2次元画像に含まれる前記路面標識投影画像の複数の特徴点と、前記路面標識実写画像の複数の特徴点とが一致するように、前記透視投影条件を修正する、地図画像処理装置。
【請求項3】
請求項1に記載の地図画像処理装置であって、
前記撮影画像に含まれる地物の画像を、修正された前記透視投影条件で透視投影された前記2次元画像に含まれる前記地物に対応付けることにより、前記撮影画像に含まれる地物の画像を前記地図データにテクスチャマッピングするテクスチャ適用部
を備える、地図画像処理装置。
【請求項4】
地図データを記憶する記憶部を有する情報処理装置を用いた地図生成方法であって、
前記地図データを所定の透視投影条件で透視投影して、2次元画像に変換し、
車両の走行方向の現実世界を撮影した撮影画像を取得し、
前記撮影画像に含まれる路面標識実写画像を認識し、
前記路面標識実写画像と、前記透視投影条件を用いて変換された前記2次元画像に含まれる前記路面標識実写画像に対応する路面標識投影画像とを比較し、前記路面標識実写画像と前記路面標識投影画像とが一致するように、前記透視投影条件を修正する、地図画像処理方法。
【請求項5】
地図データを記憶する記憶部を有する情報処理装置に地図画像処理するコンピュータプログラムであって、
前記地図データを所定の透視投影条件で透視投影して、2次元画像に変換する座標変換機能と、
車両の走行方向の現実世界を撮影した撮影画像を取得する撮影画像取得機能と、
前記撮影画像に含まれる路面標識実写画像を認識する路面標識認識機能と、
前記路面標識実写画像と、前記透視投影条件を用いて変換された前記2次元画像に含まれる前記路面標識実写画像に対応する路面標識投影画像とを比較し、前記路面標識実写画像と前記路面標識投影画像とが一致するように、前記透視投影条件を修正する透視投影条件修正機能と、
を前記情報処理装置のコンピュータに実現させる、コンピュータプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】

【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2010−218362(P2010−218362A)
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願番号】特願2009−65837(P2009−65837)
【出願日】平成21年3月18日(2009.3.18)
【出願人】(502002186)株式会社ジオ技術研究所 (23)
【Fターム(参考)】
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願日】平成21年3月18日(2009.3.18)
【出願人】(502002186)株式会社ジオ技術研究所 (23)
【Fターム(参考)】
[ Back to top ]