
地図画像統合データベース生成システム及び地図画像統合データベース生成プログラム
【課題】移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる撮影対象位置特定装置、地図画像統合データベース生成装置及び撮影対象位置特定プログラムを提供する。
【解決手段】撮影装置10が撮影対象を撮影すると、制御装置16は、この画像情報とともに、撮影装置10のシャッターに同期あるいは非同期で角度距離計測器12が計測した撮影装置10の撮影位置と撮影対象との距離データと撮影装置10の撮影方向の方位角及び仰俯角を取得する。また、上記シャッターに同期あるいは非同期で、座標計測装置14から撮影装置10の撮影位置の座標情報を取得する。次に、制御装置16は、上記取得した、距離データ、方位角及び仰俯角のデータ及び座標情報のデータに基づいて、撮影対象の座標情報を演算する。また、撮影対象の画像情報及びその座標情報は、互いに関連付けて出力する。
【解決手段】撮影装置10が撮影対象を撮影すると、制御装置16は、この画像情報とともに、撮影装置10のシャッターに同期あるいは非同期で角度距離計測器12が計測した撮影装置10の撮影位置と撮影対象との距離データと撮影装置10の撮影方向の方位角及び仰俯角を取得する。また、上記シャッターに同期あるいは非同期で、座標計測装置14から撮影装置10の撮影位置の座標情報を取得する。次に、制御装置16は、上記取得した、距離データ、方位角及び仰俯角のデータ及び座標情報のデータに基づいて、撮影対象の座標情報を演算する。また、撮影対象の画像情報及びその座標情報は、互いに関連付けて出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、撮影対象位置特定装置、地図画像統合データベース生成システム及び撮影対象位置特定プログラムに関する。
【背景技術】
【0002】
従来より、航空機等に搭載したカメラにより地表面の画像を撮影し、撮影対象である地表面等の位置を特定する技術が提案されている。例えば、下記特許文献1には、航空機に搭載され常に鉛直下方を撮影するテレビカメラが出力する映像を見ながら、リアルタイムに被害地点の判読登録ができる位置判読装置が開示されている。また、下記特許文献2には、航空機等の移動体に搭載したカメラにより地表面の画像を撮影し、カメラの撮像方向、移動体の進行方向、移動体の絶対位置、カメラと被写体との距離から被写体の絶対位置を特定する移動体に搭載された位置特定装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−331831号公報
【特許文献2】特開2001−343213号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1にかかる従来の技術においては、カメラの撮影方向が鉛直下方に限定され、撮影方向の自由度が低いという問題があった。
【0005】
また、特許文献2にかかる従来の技術においては、航空機等の移動体に固定された軸に対してカメラの回転角度を求め、この回転角度と移動体の進行方向とから方位角を決定するので、操作者が手に持って撮影を行う場合には方位角を決定できないという問題があった。
【0006】
本発明の目的は、移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる撮影対象位置特定装置、地図画像統合データベース生成装置及び撮影対象位置特定プログラムを提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の第1の実施形態は、撮影対象位置特定装置であって、任意の撮影位置から任意の撮影方向にある撮影対象を撮影する撮影手段と、前記撮影位置と前記撮影対象との距離を計測する距離計測手段と、前記撮影方向の方位角を地磁気に基づいて計測する方位角計測手段と、前記撮影方向の仰俯角を計測する仰俯角計測手段と、前記撮影位置の座標を計測する座標計測手段と、前記撮影位置の座標、前記距離、前記方位角及び前記仰俯角に基づき、前記撮影対象の座標情報を演算する撮影対象座標演算手段と、を備えることを特徴とする。
【0008】
また、第2の実施形態は、上記撮影対象位置特定装置において、前記距離計測手段は、レーザー距離計であることを特徴とする。
【0009】
また、第3の実施形態は、地図画像統合データベース生成システムであって、上記撮影対象位置特定装置と、前記撮影手段が撮影した撮影対象の画像情報と前記撮影対象座標演算手段が演算した撮影対象の座標情報とが関連付けられた地理情報システム上のデータを出力する地理情報データ出力装置と、を備えることを特徴とする。
【0010】
また、第4の実施形態は、上記地図画像統合データベース生成システムが、さらに前記地理情報データ出力装置が出力したデータを表示する表示装置を備えることを特徴とする。
【0011】
また、第5の実施形態は、上記地図画像統合データベース生成システムにおいて、前記表示装置は、前記地理情報データ出力装置が出力した画像情報を、前記方位角計測手段が計測した方位角及び前記仰俯角計測手段が計測した仰俯角に基づいて、撮影方向に直交するように傾けて3次元地図上に表示することを特徴とする。
【0012】
また、第6の実施形態は、撮影対象位置特定プログラムであって、コンピュータを、撮影手段により任意の撮影位置から任意の撮影方向にある撮影対象を撮影した画像情報を取得する画像情報取得手段、前記撮影位置と前記撮影対象との距離の計測結果を取得する距離情報取得手段、前記撮影方向の方位角の計測結果を取得する方位角取得手段、前記撮影方向の仰俯角の計測結果を取得する仰俯角取得手段、前記撮影位置の座標情報を取得する座標情報取得手段、前記撮影位置の座標、前記距離、前記方位角及び前記仰俯角に基づき、前記撮影対象の座標情報を演算する撮影対象座標演算手段、として機能させることを特徴とする。
【発明の効果】
【0013】
本発明の第1、第2及び第6の実施形態によれば、移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる。
【0014】
また、本発明の第3の実施形態によれば、撮影対象の画像情報と座標情報とを関連付けて地理情報システム上のデータを出力することができる。
【0015】
また、本発明の第4の実施形態によれば、撮影対象の画像情報と座標情報とを関連付けて地理情報システム上のデータを表示することができる。
【0016】
また、本発明の第5の実施形態によれば、画像情報を撮影方向に直交するように傾けて3次元地図上に表示し、強調表示することができる。
【図面の簡単な説明】
【0017】
【図1】実施形態にかかる地図画像統合データベース生成システムの構成図である。
【図2】図1に示された制御装置を構成するコンピュータのハードウェア構成の例を示す図である。
【図3】実施形態にかかる制御装置の機能ブロック図である。
【図4】図3に示された対象座標演算部の演算処理の説明図である。
【図5】撮影位置と撮影対象との距離が測定できなかった点に距離を付加する処理の説明図である。
【図6】図3に示された三次元画像表示制御部の処理動作の説明図である。
【図7】実施形態にかかる制御装置の動作例のフロー図である。
【発明を実施するための形態】
【0018】
以下、本発明を実施するための形態(以下、実施形態という)を説明する。
【0019】
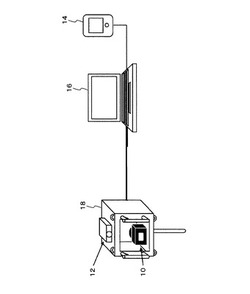
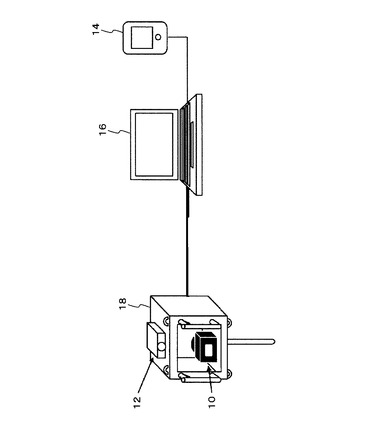
図1には、実施形態にかかる地図画像統合データベース生成システムの構成図が示される。図1において、地図画像統合データベース生成システムは、撮影装置10、角度距離計測器12、座標計測装置14、制御装置16を含んで構成されている。
【0020】
撮影装置10は、CCDカメラその他の適宜なカメラにより構成され、撮影対象を撮影して、撮影対象の画像情報を生成する。なお、撮影装置10には、動画を撮影するビデオカメラを含んでもよい。
【0021】
角度距離計測器12は、撮影装置10の撮影位置と撮影対象との距離、撮影装置10の撮影方向の方位角及び仰俯角を計測する。撮影位置と撮影対象との距離は、例えば従来公知のレーザー距離計等を使用して計測する。また、撮影方向は、例えば撮影装置10を構成するカメラのレンズの光軸方向であり、予め100m〜200mといった遠方において、カメラレンズの光軸と、角度距離計測器12を構成するレーザー距離計等の光軸が略平行となるよう調整された角度距離計測器12を用いて、撮影対象Pを標的するよう角度距離計測器12の光軸方向を調整し、上記撮影方向の方位角及び仰俯角を計測する。この場合、撮影方向の方位角は、従来公知の磁気センサにより地磁気の水平方向成分を検出することにより計測する。また、撮影方向の仰俯角は、従来公知の加速度センサ等を使用して計測する。なお、方位角の計測に磁気センサーを用いる場合、センサーの置き場所によっては設置場所周辺の磁界の歪の影響を受ける可能性がある。この場合は、磁気センサー設置場所周辺に磁界の歪が無い条件下と磁界の歪がある条件下で、同じ目標物を同じ地点から計測し、計測された方位角の差を求め、その差を方位角の補正値とすることができる。角度距離計測器12による上記距離及び角度の計測は、撮影装置10のシャッターと同期して行われる。なお、動画撮影を行っている場合には、所定時間間隔毎に上記計測を行う構成としてもよい。
【0022】
座標計測装置14は、GPS(全地球測位システム )受信機を含んで構成され、撮影装置10の撮影位置の座標値(例えば、経度、緯度、標高を計測する。なお、撮影対象Pの画像を平面(2次元)地図上に表示する場合には、撮影対象PのZp座標の算出に必要な撮影位置のz座標の取得は必ずしも必要ではない。上記座標値の計測は、撮影装置10のシャッターと同期して行われる。なお、動画撮影を行っている場合には、所定時間間隔毎に上記座標値の計測を行う構成としてもよい。なお、図1では、座標計測装置14が通信線により制御装置16に接続されているが、この例は使用者が撮影時に自身の身につけて(例えばポケット等に挿入して)使用し、撮影装置10と使用者とが同じ位置であるとみなせることが前提となっている。この座標計測装置14は、後述する筐体18に固定してもよい。この場合、例えばヘリコプターの窓際等、撮影装置10の近傍(1〜2m)でGPS衛星からの電波を良好に受信できる場所に設置することが好ましい。
【0023】
制御装置16は、適宜なコンピュータにより構成され、上記座標計測装置14が計測した撮影位置の座標値、上記角度距離計測器12が計測した撮影位置と撮影対象との距離、上記方位角及び上記仰俯角に基づき、撮影対象の座標情報を求める。また、求めた座標情報と、撮影装置10が撮影した撮影対象の画像情報とを関連付けて出力する。
【0024】
なお、撮影装置10及び角度距離計測器12は、使用者が手で持って操作できるように、適宜な筐体18に収容されている。この筐体18には、制御装置16を収容する構成としてもよい。また、GPS衛星からの電波を受信して撮影位置の座標値が計測できるのであれば、更に座標計測装置14を筐体18に収容する構成としてもよい。実施形態にかかる地図画像統合データベース生成システムは、角度距離計測器12が地磁気の水平方向成分を検出することにより方位角を計測するので、航空機、車両等の移動体に固定された軸に対してカメラの回転角度を求める必要がない。このため、使用者が手で持った状態でも方位角を計測することができる。
【0025】
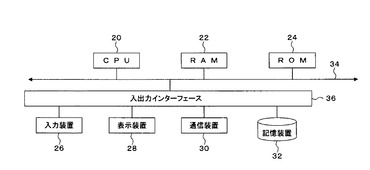
図2には、図1に示された制御装置16を構成するコンピュータのハードウェア構成の例が示される。図2において、制御装置16は、中央処理装置(例えばマイクロプロセッサ等のCPUを使用することができる)20、ランダムアクセスメモリ(RAM)22、読み出し専用メモリ(ROM)24、入力装置26、表示装置28、通信装置30及び記憶装置32を含んで構成されており、これらの構成要素は、バス34により互いに接続されている。また、入力装置26、表示装置28、通信装置30及び記憶装置32は、それぞれ入出力インターフェース36を介してバス34に接続されている。
【0026】
CPU20は、RAM22またはROM24に格納されている制御プログラムに基づいて、後述する各部の動作を制御する。RAM22は主としてCPU20の作業領域として機能し、ROM24にはBIOS等の制御プログラムその他のCPU20が使用するデータが格納されている。
【0027】
また、入力装置26は、キーボード、ポインティングデバイス等により構成され、使用者が動作指示等を入力するために使用する。
【0028】
また、表示装置28は、液晶ディスプレイ等により構成され、地図情報、撮影装置10が撮影した画像情報等を表示する。
【0029】
また、通信装置30は、USB(ユニバーサルシリアルバス)ポート、ネットワークポートその他の適宜なインターフェースにより構成され、CPU20がネットワーク等の通信手段を介して外部の装置とデータをやり取りするために使用する。また、撮影装置10、角度距離計測器12、座標計測装置14から画像情報及び距離と角度の計測値も、通信装置30を介して取得する。
【0030】
また、記憶装置32は、ハードディスク等の磁気記憶装置であり、後述する処理に必要となる種々のデータを記憶する。なお、記憶装置32としては、ハードディスクの代わりに、デジタル・バーサタイル・ディスク(DVD)、コンパクトディスク(CD)、光磁気ディスク(MO)、フレキシブルディスク(FD)、磁気テープ、電気的消去および書換可能な読出し専用メモリ(EEPROM)、フラッシュ・メモリ等を使用してもよい。
【0031】
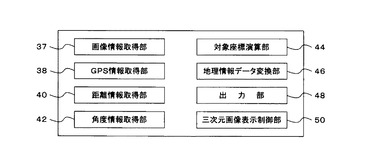
図3には、実施形態にかかる制御装置16の機能ブロック図が示される。図3において、制御装置16は、画像情報取得部37、GPS情報取得部38、距離情報取得部40、角度情報取得部42、対象座標演算部44、地理情報データ変換部46、出力部48及び三次元画像表示制御部50を含んで構成されており、これらの機能は、例えばCPU20とCPU20の処理動作を制御するプログラムとにより実現される。
【0032】
画像情報取得部37は、撮影装置10が撮影した撮影対象の画像情報を取得する。取得した画像情報には適宜な識別情報を付して地理情報データ変換部46に出力する。この識別情報としては、例えば角度距離計測器12及び座標計測装置14の計測タイミングである撮影装置10のシャッターの動作時刻とすることができる。この場合、画像情報取得部37が撮影装置10のシャッターを動作させるトリガー信号を発生させ、このトリガー信号の発生時刻を識別情報とする。このときには、シャッターを動作させるトリガー信号を角度距離計測器12及び座標計測装置14に同時に出力して各計測を行わせてもよいし、角度距離計測器12及び座標計測装置14に撮影装置10を動作させるトリガー信号とは別に、同期を取らずにトリガー信号を出力して各計測を行わせる構成としてもよい。なお、画像情報取得部37が取得する画像情報には、静止画の他、動画が含まれていてもよい。
【0033】
GPS情報取得部38は、座標計測装置14が撮影装置10のシャッターに同期して計測した撮影装置10の撮影位置の座標値を座標情報として取得する。当該座標情報には、撮影装置10のシャッターの動作時刻等の識別情報を付し、画像情報取得部37が取得した画像情報との対応関係を判定できる構成としておく。また、時刻情報を識別情報とするために、座標計測装置14で得られた時刻で制御装置16の時計を初期化し、同期が取れるようにしておく。なお、GPS情報取得部38が座標情報を取得できない場合には、ジャイロ、加速度計等を使用した公知の方法により座標情報を補正してもよい。
【0034】
距離情報取得部40は、角度距離計測器12を構成するレーザー距離計が撮影装置10のシャッターに同期あるいは非同期で計測した距離データを取得する。この距離データは、撮影装置10の撮影位置と撮影対象との距離(例えばメートル単位の値)である。なお、上記レーザー距離計が距離とは異なる形式のデータ(例えばパルス信号)を出力する場合には、距離情報取得部40がレーザー距離計の計測データから撮影装置10の撮影位置と撮影対象との距離を演算する構成としてもよい。当該距離データにも、撮影装置10のシャッターの動作時刻等の識別情報を付し、画像情報取得部37が取得した画像情報との対応関係を判定できる構成としておく。
【0035】
角度情報取得部42は、撮影装置10のシャッターに同期あるいは非同期で角度距離計測器12を構成する磁気センサが計測した撮影装置10の撮影方向の方位角及び加速度センサ等が計測した撮影装置10の撮影方向の仰俯角を取得する。なお、上記磁気センサは、磁北に対する撮影装置10の撮影方向の角度、あるいは真北からの角度に補正された磁北に対する撮影装置10の撮影方向の角度として方位角を計測する。当該方位角及び仰俯角にも、撮影装置10のシャッターの動作時刻等の識別情報を付し、画像情報取得部37が取得した画像情報との対応関係を判定できる構成としておく。
【0036】
対象座標演算部44は、GPS情報取得部38が取得した撮影位置の座標情報、距離情報取得部40が取得した撮影装置10の撮影位置と撮影対象との距離、角度情報取得部42が取得した撮影装置10の撮影方向の方位角及び仰俯角に基づき、撮影対象の座標情報を演算する。この演算には、上記識別情報にて対応関係があると判別された座標情報、距離、方位角及び仰俯角が使用される。演算した座標情報には、上述した撮影装置10のシャッターの動作時刻等の識別情報を付して出力する。また、対象座標演算部44は、上記座標情報、距離、方位角及び仰俯角の補間処理を行う。更に、対象座標演算部44は、上記補間処理で得られた座標情報、距離データ及び角度情報(方位角及び仰俯角)に対して、撮影装置10のシャッターの動作時刻等の識別情報を付し、画像情報取得部37が取得した画像情報との対応関係を判定できるようにする。なお、演算手順及び補間処理の例は後述する。
【0037】
地理情報データ変換部46は、対象座標演算部44が演算して求めた撮影対象の座標情報及び撮影装置10が撮影した撮影対象の画像情報を、所定の地理情報システムのデータ形式に変換する。地理情報システムのデータ形式としては、例えば座標情報と当該座標に対応する画像情報等を属性情報として関連付けたデータ形式等があげられる。座標情報と画像情報等との関連づけは、上記識別情報に基づいて行う。なお、撮影対象Pの画像を2次元地図上に表示する場合には、撮影対象Pの標高は必ずしも必要ではない。この場合には、3次元地図上への表示にも対応できるよう、上記属性情報に標高を含めることが好ましい。
【0038】
出力部48は、地理情報データ変換部46が地理情報システムのデータ形式に変換した撮影対象の座標情報と画像情報とを表示装置28に出力して表示させる。この場合、例えば、撮影対象の座標情報に基づいて、所定の地図上の撮影対象の位置に、撮影対象の画像情報を関連付け、入力装置26のポインティングデバイスにより撮影対象の位置をクリック(領域指定)することにより、当該画像情報を表示する構成が好適である。
【0039】
三次元画像表示制御部50は、上記撮影対象の画像情報を、撮影装置10による撮影方向が画像平面に直交する(法線となる)ように傾けて3次元地図上に表示する。この表示は、表示装置28に行わせてもよいし、システム外部の表示装置に行わせてもよい。
【0040】
なお、出力部48及び三次元画像表示制御部50の両方または一方は、制御装置16とは異なるコンピュータ上に実現してもよい。この場合には、各情報を通信装置30を介して上記異なるコンピュータに送信する構成とする。
【0041】
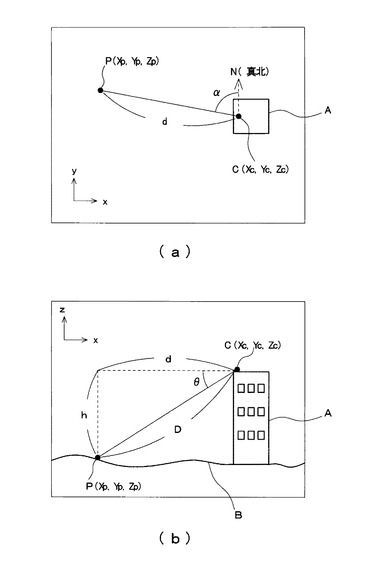
図4(a),(b)には、図3に示された対象座標演算部44の演算処理の説明図が示される。撮影装置10及び角度距離計測器12は、使用者が手で持って操作できるものであり、図4(a),(b)は、建物の屋上から使用者が地図画像統合データベース生成システムの筐体18を手で持って地表を撮影した場合の例である。
【0042】
図4(a)が(x、y)座標で規定される平面図であり、建物Aの屋上の撮影位置Cから真北Nに対して角度αの方位にある撮影対象Pを撮影している状態が示されている。また、建物Aの屋上の撮影位置Cすなわち地図画像統合データベース生成システムの撮影装置10の位置から撮影対象Pの位置までの水平距離をdで示している。なお、図4(a)では、x方向及びy方向をそれぞれ矢印で示している。
【0043】
図4(b)が(x、z)座標で規定される側面図であり、高さhの建物Aの屋上から下方の地表面B上の撮影対象Pを撮影している状態が示されている。この場合、撮影方向(仰俯角方向)は、角度θの俯角となっている。また、撮影位置Cと撮影対象Pとの距離をDで示している。なお、図4(b)では、x方向及びz方向をそれぞれ矢印で示している。
【0044】
上記方位角α、俯角θ及び距離Dには、角度距離計測器12により計測した値を用いる。なお、角度距離計測器12が計測した方位角αが磁北からの角度である場合には、真北からの角度に補正した値を用いる。これらの値は距離情報取得部40及び角度情報取得部42が取得し、対象座標演算部44に渡す。対象座標演算部44は、これらの値とGPS情報取得部38が取得した撮影位置Cの座標情報とを使用して撮影対象Pの座標情報を演算する。この場合の演算式は以下の通りである。
【0045】
撮影対象Pの座標を(Xp,Yp,Zp)とし、撮影位置Cの座標を(Xc,Yc,Zc)とすると、
Xp=Xc−d・sinα
Yp=Yc+d・cosα … (1)
Zp=Zc−D・sinθとなる。
ただし、d=D・cosθ及びh=D・sinθである。
【0046】
なお、撮影位置Cの座標値が経度、緯度、標高で取得されている場合は、下記式(2)により撮影対象Pの座標を求める。
Xp=Xc−d・sinα/Kx
Yp=Yc+d・cosα/Ky … (2)
Zp=Zc−D・sinθ
ここで、Kxは緯度Ycにおける経度1度当たりの距離であり、Kyは緯度1度当たりの距離である。
【0047】
以上のようにして求めた撮影対象Pの座標情報に基づいて、地理情報データ変換部46は、撮影対象Pの座標情報と撮影対象Pの画像情報とを関連付ける。この場合、例えば地図情報上の上記座標(Xp,Yp,Zp)で表される点(画素)を含む所定の大きさの領域を設定し、この領域に撮影装置10が撮影した撮影対象Pの画像情報を関連付ける。これにより、例えば表示装置28上に表示された地図上で、上記領域を入力装置26のポインティングデバイスによりクリックすることにより、関連付けられた画像情報を表示する構成とすることができる。その際には、当該画像情報を、上記関連付けられた座標(Xp,Yp,Zp)の近傍に表示するのが好適である。また、上記画像情報を表示させておき、これをクリックすることにより地図上の関連付けられた領域(撮影対象Pの位置)を、点滅あるいは色変更等により表示する構成とすることもできる。さらに、複数の上記画像情報を表す文字列(例えば地名)等の一覧表を作成しておき、この一覧票を表示装置28上に表示しつつ当該文字列をクリックすることにより、対応する画像情報と画像情報に関連付けられた地図上の領域の一方または両方を表示する構成としてもよい。なお、本実施例では3次元地図上に表示する場合を例に説明しているが、2次元地図上に表示する場合には必ずしもZp座標を求める必要はない。
【0048】
以上に説明した実施形態は、使用者が地図画像統合データベース生成システムの筐体18を手で持って撮影対象Pを撮影する例であったが、例えば飛行機またはヘリコプター等の航空機上から撮影を行うこともできる。
【0049】
また、角度距離計測器12で撮影位置と撮影対象Pとの距離、方位角及び仰俯角を計測する際には、上述したように、角度距離計測器12の光軸方向で行うが、距離を測定する場合には、当該光軸方向に地表面等の撮影対象Pが存在していることが前提となる。しかし、撮影方向のぶれ等により、撮影対象Pが存在しない方向で撮影装置10のシャッターが押されることも考えられる。このときには、例えば撮影方向が天空を向いている等の理由で、角度距離計測器12から出射したレーザ光が反射することができず、距離を測定することができない。この場合には、距離を測定できた点の間で直線補間を行い、距離が測定できなかった点の距離を付加する構成としてもよい。
【0050】
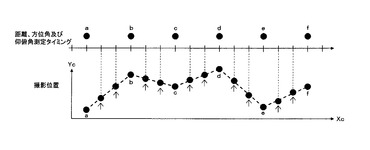
図5には、撮影位置から撮影対象への距離、方位角及び仰俯角のいずれかあるいは全てが欠測となった点に欠測値を補う処理(補間処理)の説明図が示される。図5では、上段に距離、方位角及び仰俯角の測定タイミング(撮影時に距離測定が行えた場合が丸印)が示される。また、下段に撮影位置(Xc,Yc)が丸印で示される。なお、図5は、航空機上から撮影対象を撮影した場合の例である。
【0051】
図5において、a,b,c,d,e,fの各点では、撮影対象の撮影時に距離等について欠測がない。また、これ以外の点(上向き矢印で示す)は、撮影対象の撮影時に距離等が欠測となった点である。欠測となった点では、距離情報取得部40及び角度情報取得部42が、a,b,c,d,e,fの各点における測定データから、欠測となった点に対して補う値(距離情報取得部40では距離の値、角度情報取得部42では方位角及び仰俯角の値)を直線補間により算出する。例えば、a点とb点との間では距離データが測定されていないが、一定の時間間隔で取得した撮影位置データが2点あるので、a点の距離データとb点の距離データとの差の1/3の値と2/3の値を、それぞれb点の距離データから減算することにより上記2点の距離データとする。他の距離データが無い点についても同様とする。なお、図5ではシャッターに同期して距離データを取得する場合を例に示しているが、非同期の場合は撮影対象の撮影タイミングと距離測定タイミングの時間差を用いて、同様に距離データを補間することができる。方位角及び仰俯角の補間も同様である。また、GPSで座標情報が欠測となった場合にも同様にこれを補間することが可能である。
【0052】
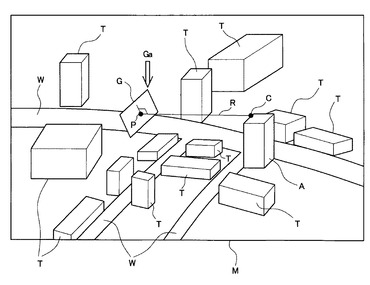
図6には、図3に示された三次元画像表示制御部50の処理動作の説明図が示される。図6の例では、建物Aの屋上の撮影位置Cから俯角方向(下向き)に撮影対象Pを撮影している。なお、撮影位置Cと撮影対象Pとは、3次元地図M上に示されている。なお、3次元地図Mは、建物A,T及び道路W等が立体的に表示された地図である。この場合、三次元画像表示制御部50は、角度距離計測器12が撮影装置10のシャッターに同期して測定し、角度情報取得部42が取得した方位角及び仰俯角に基づいて、撮影装置10が撮影した撮影対象Pの画像Gを撮影方向Rに直交するように傾けて3次元地図M上に表示する。画像Gの表示位置は、対象座標演算部44が演算した撮影対象Pの座標情報に対応する3次元地図M上の位置である。また、図6に示されるように、画像Gを矢印Gaにより指し示したり、撮影方向Rを表示してもよい。なお、撮影対象Pの座標は画像Gの中心となっている。
【0053】
三次元画像表示制御部50の上記構成により、3次元地図M上で撮影対象Pを強調表示することができる。この結果、3次元地図M上で必要な画像Gを使用者が容易に認識することができる。
【0054】
なお、上記実施形態では、3次元地図上に画像Gを表示しているが、例えば都市部等においては高層建築物等が多数存在するために画像Gが隠れてしまい、見えにくくなることが考えられる。この場合には、3次元地図上の建物全体、あるいは画像Gと視点との間に存在する建物の高さを低くする、あるいは0(例えば正射投影画像等)にして表示することが好ましい。
【0055】
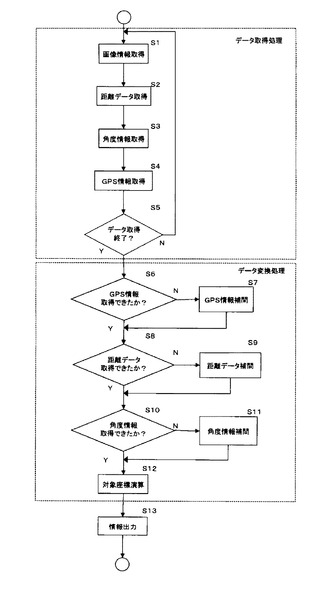
図7には、実施形態にかかる制御装置16の動作例のフローが示される。本システムにおける処理は、撮影装置10のシャッターに同期あるいは非同期で撮影対象の画像情報、撮影位置と撮影対象との距離データ、撮影方向の方位角及び仰俯角並びに撮影位置の座標情報を取得するデータ取得処理と、上記データ取得処理終了後に各取得データを確認し、欠測があればこれを補間した上で、撮影対象の座標情報を演算するデータ変換処理に大きく分かれている。まず、データ取得処理について説明する。図7において、撮影開始の指示が入力されると、画像情報取得部37が、撮影装置10が撮影した撮影対象の画像情報を取得し、地理情報データ変換部46に出力する(S1)。
【0056】
次に、距離情報取得部40が、角度距離計測器12が計測した撮影装置10の撮影位置と撮影対象との距離データを取得し、対象座標演算部44に出力する(S2)。また、角度情報取得部42が、角度距離計測器12が計測した撮影装置10の撮影方向の方位角及び仰俯角を取得し、対象座標演算部44に出力する(S3)。なお、距離データ取得ステップ(S2)と方位角及び仰俯角取得ステップ(S3)の順序は逆でも構わない。
【0057】
GPS情報取得部38は、撮影装置10のシャッターを動作させるトリガー信号のタイミング等に合わせて、座標計測装置14から撮影装置10の撮影位置の座標情報を取得する(S4)。次に、データ取得終了指示の有無を確認し(S5)、データ取得を終了しない場合にはS1に戻ってデータ取得を継続する。データ取得を終了する場合には、データ変換処理に移行する。この結果、撮影対象に関連する一連のデータ(撮影対象の画像情報、撮影位置と撮影対象との距離データ、撮影方向の方位角及び仰俯角並びに撮影位置の座標情報)を取得することができる。
【0058】
次に、データ変換処理について説明する。まずS4の処理において座標情報が取得できたか否かを判断し(S6)、取得できなかった場合は、対象座標演算部44にて座標情報の補間処理を行う(S7)。また、対象座標演算部44は、取得した座標情報及び補間処理で得た座標情報に前述した識別情報を付与する。
【0059】
次に、S2の処理において距離データを取得できたか否かを判断し(S8)、取得できなかった場合は対象座標演算部44にて補間処理を行う(S9)。また、対象座標演算部44は、S2で取得した距離データ及び補間処理で得た距離データに前述した識別情報を付与する。
【0060】
次に、S3の処理において角度情報を取得できたか否かを判断し(S10)、取得できなかった場合は対象座標演算部44にて補間処理を行う(S11)。また、対象座標演算部44は、S3で取得した角度情報及び補間処理で得た角度情報に前述した識別情報を付与する。
【0061】
次に、対象座標演算部44は、上記S2、S3、S4で取得された、またはS7、S9、S11で補間処理を行った、識別情報により互いに対応関係が判別された距離データ、方位角及び仰俯角のデータ及び座標情報のデータより、上述した式(1)または(式2)に基づいて、撮影対象の座標情報を演算する(S12)。
【0062】
最後に、S1において画像情報取得部37が取得した撮影対象の画像情報及びS12において対象座標演算部44が演算した座標情報は、地理情報データ変換部46が互いに関連付け、出力部48が表示装置28に表示させる(S13)。なお、上記互いに関連付けられた画像情報及び座標情報は、地理情報システムのデータとして通信装置30を介して外部のコンピュータ等に送信してもよい。
【0063】
上述した、図7の各ステップを実行するためのプログラムは、記録媒体に格納することも可能であり、また、そのプログラムを通信手段によって提供しても良い。その場合、例えば、上記説明したプログラムについて、「プログラムを記録したコンピュータ読み取り可能な記録媒体」の発明または「データ信号」の発明として捉えても良い。
【符号の説明】
【0064】
10 撮影装置、12 角度距離計測器、14 座標計測装置、16 制御装置、18 筐体、20 CPU、22 RAM、24 ROM、26 入力装置、28 表示装置、30 通信装置、32 記憶装置、34 バス、36 入出力インターフェース、37 画像情報取得部、38 GPS情報取得部、40 距離情報取得部、42 角度情報取得部、44 対象座標演算部、46 地理情報データ変換部、48 出力部、50 三次元画像表示制御部。
【技術分野】
【0001】
本発明は、撮影対象位置特定装置、地図画像統合データベース生成システム及び撮影対象位置特定プログラムに関する。
【背景技術】
【0002】
従来より、航空機等に搭載したカメラにより地表面の画像を撮影し、撮影対象である地表面等の位置を特定する技術が提案されている。例えば、下記特許文献1には、航空機に搭載され常に鉛直下方を撮影するテレビカメラが出力する映像を見ながら、リアルタイムに被害地点の判読登録ができる位置判読装置が開示されている。また、下記特許文献2には、航空機等の移動体に搭載したカメラにより地表面の画像を撮影し、カメラの撮像方向、移動体の進行方向、移動体の絶対位置、カメラと被写体との距離から被写体の絶対位置を特定する移動体に搭載された位置特定装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−331831号公報
【特許文献2】特開2001−343213号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1にかかる従来の技術においては、カメラの撮影方向が鉛直下方に限定され、撮影方向の自由度が低いという問題があった。
【0005】
また、特許文献2にかかる従来の技術においては、航空機等の移動体に固定された軸に対してカメラの回転角度を求め、この回転角度と移動体の進行方向とから方位角を決定するので、操作者が手に持って撮影を行う場合には方位角を決定できないという問題があった。
【0006】
本発明の目的は、移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる撮影対象位置特定装置、地図画像統合データベース生成装置及び撮影対象位置特定プログラムを提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の第1の実施形態は、撮影対象位置特定装置であって、任意の撮影位置から任意の撮影方向にある撮影対象を撮影する撮影手段と、前記撮影位置と前記撮影対象との距離を計測する距離計測手段と、前記撮影方向の方位角を地磁気に基づいて計測する方位角計測手段と、前記撮影方向の仰俯角を計測する仰俯角計測手段と、前記撮影位置の座標を計測する座標計測手段と、前記撮影位置の座標、前記距離、前記方位角及び前記仰俯角に基づき、前記撮影対象の座標情報を演算する撮影対象座標演算手段と、を備えることを特徴とする。
【0008】
また、第2の実施形態は、上記撮影対象位置特定装置において、前記距離計測手段は、レーザー距離計であることを特徴とする。
【0009】
また、第3の実施形態は、地図画像統合データベース生成システムであって、上記撮影対象位置特定装置と、前記撮影手段が撮影した撮影対象の画像情報と前記撮影対象座標演算手段が演算した撮影対象の座標情報とが関連付けられた地理情報システム上のデータを出力する地理情報データ出力装置と、を備えることを特徴とする。
【0010】
また、第4の実施形態は、上記地図画像統合データベース生成システムが、さらに前記地理情報データ出力装置が出力したデータを表示する表示装置を備えることを特徴とする。
【0011】
また、第5の実施形態は、上記地図画像統合データベース生成システムにおいて、前記表示装置は、前記地理情報データ出力装置が出力した画像情報を、前記方位角計測手段が計測した方位角及び前記仰俯角計測手段が計測した仰俯角に基づいて、撮影方向に直交するように傾けて3次元地図上に表示することを特徴とする。
【0012】
また、第6の実施形態は、撮影対象位置特定プログラムであって、コンピュータを、撮影手段により任意の撮影位置から任意の撮影方向にある撮影対象を撮影した画像情報を取得する画像情報取得手段、前記撮影位置と前記撮影対象との距離の計測結果を取得する距離情報取得手段、前記撮影方向の方位角の計測結果を取得する方位角取得手段、前記撮影方向の仰俯角の計測結果を取得する仰俯角取得手段、前記撮影位置の座標情報を取得する座標情報取得手段、前記撮影位置の座標、前記距離、前記方位角及び前記仰俯角に基づき、前記撮影対象の座標情報を演算する撮影対象座標演算手段、として機能させることを特徴とする。
【発明の効果】
【0013】
本発明の第1、第2及び第6の実施形態によれば、移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる。
【0014】
また、本発明の第3の実施形態によれば、撮影対象の画像情報と座標情報とを関連付けて地理情報システム上のデータを出力することができる。
【0015】
また、本発明の第4の実施形態によれば、撮影対象の画像情報と座標情報とを関連付けて地理情報システム上のデータを表示することができる。
【0016】
また、本発明の第5の実施形態によれば、画像情報を撮影方向に直交するように傾けて3次元地図上に表示し、強調表示することができる。
【図面の簡単な説明】
【0017】
【図1】実施形態にかかる地図画像統合データベース生成システムの構成図である。
【図2】図1に示された制御装置を構成するコンピュータのハードウェア構成の例を示す図である。
【図3】実施形態にかかる制御装置の機能ブロック図である。
【図4】図3に示された対象座標演算部の演算処理の説明図である。
【図5】撮影位置と撮影対象との距離が測定できなかった点に距離を付加する処理の説明図である。
【図6】図3に示された三次元画像表示制御部の処理動作の説明図である。
【図7】実施形態にかかる制御装置の動作例のフロー図である。
【発明を実施するための形態】
【0018】
以下、本発明を実施するための形態(以下、実施形態という)を説明する。
【0019】
図1には、実施形態にかかる地図画像統合データベース生成システムの構成図が示される。図1において、地図画像統合データベース生成システムは、撮影装置10、角度距離計測器12、座標計測装置14、制御装置16を含んで構成されている。
【0020】
撮影装置10は、CCDカメラその他の適宜なカメラにより構成され、撮影対象を撮影して、撮影対象の画像情報を生成する。なお、撮影装置10には、動画を撮影するビデオカメラを含んでもよい。
【0021】
角度距離計測器12は、撮影装置10の撮影位置と撮影対象との距離、撮影装置10の撮影方向の方位角及び仰俯角を計測する。撮影位置と撮影対象との距離は、例えば従来公知のレーザー距離計等を使用して計測する。また、撮影方向は、例えば撮影装置10を構成するカメラのレンズの光軸方向であり、予め100m〜200mといった遠方において、カメラレンズの光軸と、角度距離計測器12を構成するレーザー距離計等の光軸が略平行となるよう調整された角度距離計測器12を用いて、撮影対象Pを標的するよう角度距離計測器12の光軸方向を調整し、上記撮影方向の方位角及び仰俯角を計測する。この場合、撮影方向の方位角は、従来公知の磁気センサにより地磁気の水平方向成分を検出することにより計測する。また、撮影方向の仰俯角は、従来公知の加速度センサ等を使用して計測する。なお、方位角の計測に磁気センサーを用いる場合、センサーの置き場所によっては設置場所周辺の磁界の歪の影響を受ける可能性がある。この場合は、磁気センサー設置場所周辺に磁界の歪が無い条件下と磁界の歪がある条件下で、同じ目標物を同じ地点から計測し、計測された方位角の差を求め、その差を方位角の補正値とすることができる。角度距離計測器12による上記距離及び角度の計測は、撮影装置10のシャッターと同期して行われる。なお、動画撮影を行っている場合には、所定時間間隔毎に上記計測を行う構成としてもよい。
【0022】
座標計測装置14は、GPS(全地球測位システム )受信機を含んで構成され、撮影装置10の撮影位置の座標値(例えば、経度、緯度、標高を計測する。なお、撮影対象Pの画像を平面(2次元)地図上に表示する場合には、撮影対象PのZp座標の算出に必要な撮影位置のz座標の取得は必ずしも必要ではない。上記座標値の計測は、撮影装置10のシャッターと同期して行われる。なお、動画撮影を行っている場合には、所定時間間隔毎に上記座標値の計測を行う構成としてもよい。なお、図1では、座標計測装置14が通信線により制御装置16に接続されているが、この例は使用者が撮影時に自身の身につけて(例えばポケット等に挿入して)使用し、撮影装置10と使用者とが同じ位置であるとみなせることが前提となっている。この座標計測装置14は、後述する筐体18に固定してもよい。この場合、例えばヘリコプターの窓際等、撮影装置10の近傍(1〜2m)でGPS衛星からの電波を良好に受信できる場所に設置することが好ましい。
【0023】
制御装置16は、適宜なコンピュータにより構成され、上記座標計測装置14が計測した撮影位置の座標値、上記角度距離計測器12が計測した撮影位置と撮影対象との距離、上記方位角及び上記仰俯角に基づき、撮影対象の座標情報を求める。また、求めた座標情報と、撮影装置10が撮影した撮影対象の画像情報とを関連付けて出力する。
【0024】
なお、撮影装置10及び角度距離計測器12は、使用者が手で持って操作できるように、適宜な筐体18に収容されている。この筐体18には、制御装置16を収容する構成としてもよい。また、GPS衛星からの電波を受信して撮影位置の座標値が計測できるのであれば、更に座標計測装置14を筐体18に収容する構成としてもよい。実施形態にかかる地図画像統合データベース生成システムは、角度距離計測器12が地磁気の水平方向成分を検出することにより方位角を計測するので、航空機、車両等の移動体に固定された軸に対してカメラの回転角度を求める必要がない。このため、使用者が手で持った状態でも方位角を計測することができる。
【0025】
図2には、図1に示された制御装置16を構成するコンピュータのハードウェア構成の例が示される。図2において、制御装置16は、中央処理装置(例えばマイクロプロセッサ等のCPUを使用することができる)20、ランダムアクセスメモリ(RAM)22、読み出し専用メモリ(ROM)24、入力装置26、表示装置28、通信装置30及び記憶装置32を含んで構成されており、これらの構成要素は、バス34により互いに接続されている。また、入力装置26、表示装置28、通信装置30及び記憶装置32は、それぞれ入出力インターフェース36を介してバス34に接続されている。
【0026】
CPU20は、RAM22またはROM24に格納されている制御プログラムに基づいて、後述する各部の動作を制御する。RAM22は主としてCPU20の作業領域として機能し、ROM24にはBIOS等の制御プログラムその他のCPU20が使用するデータが格納されている。
【0027】
また、入力装置26は、キーボード、ポインティングデバイス等により構成され、使用者が動作指示等を入力するために使用する。
【0028】
また、表示装置28は、液晶ディスプレイ等により構成され、地図情報、撮影装置10が撮影した画像情報等を表示する。
【0029】
また、通信装置30は、USB(ユニバーサルシリアルバス)ポート、ネットワークポートその他の適宜なインターフェースにより構成され、CPU20がネットワーク等の通信手段を介して外部の装置とデータをやり取りするために使用する。また、撮影装置10、角度距離計測器12、座標計測装置14から画像情報及び距離と角度の計測値も、通信装置30を介して取得する。
【0030】
また、記憶装置32は、ハードディスク等の磁気記憶装置であり、後述する処理に必要となる種々のデータを記憶する。なお、記憶装置32としては、ハードディスクの代わりに、デジタル・バーサタイル・ディスク(DVD)、コンパクトディスク(CD)、光磁気ディスク(MO)、フレキシブルディスク(FD)、磁気テープ、電気的消去および書換可能な読出し専用メモリ(EEPROM)、フラッシュ・メモリ等を使用してもよい。
【0031】
図3には、実施形態にかかる制御装置16の機能ブロック図が示される。図3において、制御装置16は、画像情報取得部37、GPS情報取得部38、距離情報取得部40、角度情報取得部42、対象座標演算部44、地理情報データ変換部46、出力部48及び三次元画像表示制御部50を含んで構成されており、これらの機能は、例えばCPU20とCPU20の処理動作を制御するプログラムとにより実現される。
【0032】
画像情報取得部37は、撮影装置10が撮影した撮影対象の画像情報を取得する。取得した画像情報には適宜な識別情報を付して地理情報データ変換部46に出力する。この識別情報としては、例えば角度距離計測器12及び座標計測装置14の計測タイミングである撮影装置10のシャッターの動作時刻とすることができる。この場合、画像情報取得部37が撮影装置10のシャッターを動作させるトリガー信号を発生させ、このトリガー信号の発生時刻を識別情報とする。このときには、シャッターを動作させるトリガー信号を角度距離計測器12及び座標計測装置14に同時に出力して各計測を行わせてもよいし、角度距離計測器12及び座標計測装置14に撮影装置10を動作させるトリガー信号とは別に、同期を取らずにトリガー信号を出力して各計測を行わせる構成としてもよい。なお、画像情報取得部37が取得する画像情報には、静止画の他、動画が含まれていてもよい。
【0033】
GPS情報取得部38は、座標計測装置14が撮影装置10のシャッターに同期して計測した撮影装置10の撮影位置の座標値を座標情報として取得する。当該座標情報には、撮影装置10のシャッターの動作時刻等の識別情報を付し、画像情報取得部37が取得した画像情報との対応関係を判定できる構成としておく。また、時刻情報を識別情報とするために、座標計測装置14で得られた時刻で制御装置16の時計を初期化し、同期が取れるようにしておく。なお、GPS情報取得部38が座標情報を取得できない場合には、ジャイロ、加速度計等を使用した公知の方法により座標情報を補正してもよい。
【0034】
距離情報取得部40は、角度距離計測器12を構成するレーザー距離計が撮影装置10のシャッターに同期あるいは非同期で計測した距離データを取得する。この距離データは、撮影装置10の撮影位置と撮影対象との距離(例えばメートル単位の値)である。なお、上記レーザー距離計が距離とは異なる形式のデータ(例えばパルス信号)を出力する場合には、距離情報取得部40がレーザー距離計の計測データから撮影装置10の撮影位置と撮影対象との距離を演算する構成としてもよい。当該距離データにも、撮影装置10のシャッターの動作時刻等の識別情報を付し、画像情報取得部37が取得した画像情報との対応関係を判定できる構成としておく。
【0035】
角度情報取得部42は、撮影装置10のシャッターに同期あるいは非同期で角度距離計測器12を構成する磁気センサが計測した撮影装置10の撮影方向の方位角及び加速度センサ等が計測した撮影装置10の撮影方向の仰俯角を取得する。なお、上記磁気センサは、磁北に対する撮影装置10の撮影方向の角度、あるいは真北からの角度に補正された磁北に対する撮影装置10の撮影方向の角度として方位角を計測する。当該方位角及び仰俯角にも、撮影装置10のシャッターの動作時刻等の識別情報を付し、画像情報取得部37が取得した画像情報との対応関係を判定できる構成としておく。
【0036】
対象座標演算部44は、GPS情報取得部38が取得した撮影位置の座標情報、距離情報取得部40が取得した撮影装置10の撮影位置と撮影対象との距離、角度情報取得部42が取得した撮影装置10の撮影方向の方位角及び仰俯角に基づき、撮影対象の座標情報を演算する。この演算には、上記識別情報にて対応関係があると判別された座標情報、距離、方位角及び仰俯角が使用される。演算した座標情報には、上述した撮影装置10のシャッターの動作時刻等の識別情報を付して出力する。また、対象座標演算部44は、上記座標情報、距離、方位角及び仰俯角の補間処理を行う。更に、対象座標演算部44は、上記補間処理で得られた座標情報、距離データ及び角度情報(方位角及び仰俯角)に対して、撮影装置10のシャッターの動作時刻等の識別情報を付し、画像情報取得部37が取得した画像情報との対応関係を判定できるようにする。なお、演算手順及び補間処理の例は後述する。
【0037】
地理情報データ変換部46は、対象座標演算部44が演算して求めた撮影対象の座標情報及び撮影装置10が撮影した撮影対象の画像情報を、所定の地理情報システムのデータ形式に変換する。地理情報システムのデータ形式としては、例えば座標情報と当該座標に対応する画像情報等を属性情報として関連付けたデータ形式等があげられる。座標情報と画像情報等との関連づけは、上記識別情報に基づいて行う。なお、撮影対象Pの画像を2次元地図上に表示する場合には、撮影対象Pの標高は必ずしも必要ではない。この場合には、3次元地図上への表示にも対応できるよう、上記属性情報に標高を含めることが好ましい。
【0038】
出力部48は、地理情報データ変換部46が地理情報システムのデータ形式に変換した撮影対象の座標情報と画像情報とを表示装置28に出力して表示させる。この場合、例えば、撮影対象の座標情報に基づいて、所定の地図上の撮影対象の位置に、撮影対象の画像情報を関連付け、入力装置26のポインティングデバイスにより撮影対象の位置をクリック(領域指定)することにより、当該画像情報を表示する構成が好適である。
【0039】
三次元画像表示制御部50は、上記撮影対象の画像情報を、撮影装置10による撮影方向が画像平面に直交する(法線となる)ように傾けて3次元地図上に表示する。この表示は、表示装置28に行わせてもよいし、システム外部の表示装置に行わせてもよい。
【0040】
なお、出力部48及び三次元画像表示制御部50の両方または一方は、制御装置16とは異なるコンピュータ上に実現してもよい。この場合には、各情報を通信装置30を介して上記異なるコンピュータに送信する構成とする。
【0041】
図4(a),(b)には、図3に示された対象座標演算部44の演算処理の説明図が示される。撮影装置10及び角度距離計測器12は、使用者が手で持って操作できるものであり、図4(a),(b)は、建物の屋上から使用者が地図画像統合データベース生成システムの筐体18を手で持って地表を撮影した場合の例である。
【0042】
図4(a)が(x、y)座標で規定される平面図であり、建物Aの屋上の撮影位置Cから真北Nに対して角度αの方位にある撮影対象Pを撮影している状態が示されている。また、建物Aの屋上の撮影位置Cすなわち地図画像統合データベース生成システムの撮影装置10の位置から撮影対象Pの位置までの水平距離をdで示している。なお、図4(a)では、x方向及びy方向をそれぞれ矢印で示している。
【0043】
図4(b)が(x、z)座標で規定される側面図であり、高さhの建物Aの屋上から下方の地表面B上の撮影対象Pを撮影している状態が示されている。この場合、撮影方向(仰俯角方向)は、角度θの俯角となっている。また、撮影位置Cと撮影対象Pとの距離をDで示している。なお、図4(b)では、x方向及びz方向をそれぞれ矢印で示している。
【0044】
上記方位角α、俯角θ及び距離Dには、角度距離計測器12により計測した値を用いる。なお、角度距離計測器12が計測した方位角αが磁北からの角度である場合には、真北からの角度に補正した値を用いる。これらの値は距離情報取得部40及び角度情報取得部42が取得し、対象座標演算部44に渡す。対象座標演算部44は、これらの値とGPS情報取得部38が取得した撮影位置Cの座標情報とを使用して撮影対象Pの座標情報を演算する。この場合の演算式は以下の通りである。
【0045】
撮影対象Pの座標を(Xp,Yp,Zp)とし、撮影位置Cの座標を(Xc,Yc,Zc)とすると、
Xp=Xc−d・sinα
Yp=Yc+d・cosα … (1)
Zp=Zc−D・sinθとなる。
ただし、d=D・cosθ及びh=D・sinθである。
【0046】
なお、撮影位置Cの座標値が経度、緯度、標高で取得されている場合は、下記式(2)により撮影対象Pの座標を求める。
Xp=Xc−d・sinα/Kx
Yp=Yc+d・cosα/Ky … (2)
Zp=Zc−D・sinθ
ここで、Kxは緯度Ycにおける経度1度当たりの距離であり、Kyは緯度1度当たりの距離である。
【0047】
以上のようにして求めた撮影対象Pの座標情報に基づいて、地理情報データ変換部46は、撮影対象Pの座標情報と撮影対象Pの画像情報とを関連付ける。この場合、例えば地図情報上の上記座標(Xp,Yp,Zp)で表される点(画素)を含む所定の大きさの領域を設定し、この領域に撮影装置10が撮影した撮影対象Pの画像情報を関連付ける。これにより、例えば表示装置28上に表示された地図上で、上記領域を入力装置26のポインティングデバイスによりクリックすることにより、関連付けられた画像情報を表示する構成とすることができる。その際には、当該画像情報を、上記関連付けられた座標(Xp,Yp,Zp)の近傍に表示するのが好適である。また、上記画像情報を表示させておき、これをクリックすることにより地図上の関連付けられた領域(撮影対象Pの位置)を、点滅あるいは色変更等により表示する構成とすることもできる。さらに、複数の上記画像情報を表す文字列(例えば地名)等の一覧表を作成しておき、この一覧票を表示装置28上に表示しつつ当該文字列をクリックすることにより、対応する画像情報と画像情報に関連付けられた地図上の領域の一方または両方を表示する構成としてもよい。なお、本実施例では3次元地図上に表示する場合を例に説明しているが、2次元地図上に表示する場合には必ずしもZp座標を求める必要はない。
【0048】
以上に説明した実施形態は、使用者が地図画像統合データベース生成システムの筐体18を手で持って撮影対象Pを撮影する例であったが、例えば飛行機またはヘリコプター等の航空機上から撮影を行うこともできる。
【0049】
また、角度距離計測器12で撮影位置と撮影対象Pとの距離、方位角及び仰俯角を計測する際には、上述したように、角度距離計測器12の光軸方向で行うが、距離を測定する場合には、当該光軸方向に地表面等の撮影対象Pが存在していることが前提となる。しかし、撮影方向のぶれ等により、撮影対象Pが存在しない方向で撮影装置10のシャッターが押されることも考えられる。このときには、例えば撮影方向が天空を向いている等の理由で、角度距離計測器12から出射したレーザ光が反射することができず、距離を測定することができない。この場合には、距離を測定できた点の間で直線補間を行い、距離が測定できなかった点の距離を付加する構成としてもよい。
【0050】
図5には、撮影位置から撮影対象への距離、方位角及び仰俯角のいずれかあるいは全てが欠測となった点に欠測値を補う処理(補間処理)の説明図が示される。図5では、上段に距離、方位角及び仰俯角の測定タイミング(撮影時に距離測定が行えた場合が丸印)が示される。また、下段に撮影位置(Xc,Yc)が丸印で示される。なお、図5は、航空機上から撮影対象を撮影した場合の例である。
【0051】
図5において、a,b,c,d,e,fの各点では、撮影対象の撮影時に距離等について欠測がない。また、これ以外の点(上向き矢印で示す)は、撮影対象の撮影時に距離等が欠測となった点である。欠測となった点では、距離情報取得部40及び角度情報取得部42が、a,b,c,d,e,fの各点における測定データから、欠測となった点に対して補う値(距離情報取得部40では距離の値、角度情報取得部42では方位角及び仰俯角の値)を直線補間により算出する。例えば、a点とb点との間では距離データが測定されていないが、一定の時間間隔で取得した撮影位置データが2点あるので、a点の距離データとb点の距離データとの差の1/3の値と2/3の値を、それぞれb点の距離データから減算することにより上記2点の距離データとする。他の距離データが無い点についても同様とする。なお、図5ではシャッターに同期して距離データを取得する場合を例に示しているが、非同期の場合は撮影対象の撮影タイミングと距離測定タイミングの時間差を用いて、同様に距離データを補間することができる。方位角及び仰俯角の補間も同様である。また、GPSで座標情報が欠測となった場合にも同様にこれを補間することが可能である。
【0052】
図6には、図3に示された三次元画像表示制御部50の処理動作の説明図が示される。図6の例では、建物Aの屋上の撮影位置Cから俯角方向(下向き)に撮影対象Pを撮影している。なお、撮影位置Cと撮影対象Pとは、3次元地図M上に示されている。なお、3次元地図Mは、建物A,T及び道路W等が立体的に表示された地図である。この場合、三次元画像表示制御部50は、角度距離計測器12が撮影装置10のシャッターに同期して測定し、角度情報取得部42が取得した方位角及び仰俯角に基づいて、撮影装置10が撮影した撮影対象Pの画像Gを撮影方向Rに直交するように傾けて3次元地図M上に表示する。画像Gの表示位置は、対象座標演算部44が演算した撮影対象Pの座標情報に対応する3次元地図M上の位置である。また、図6に示されるように、画像Gを矢印Gaにより指し示したり、撮影方向Rを表示してもよい。なお、撮影対象Pの座標は画像Gの中心となっている。
【0053】
三次元画像表示制御部50の上記構成により、3次元地図M上で撮影対象Pを強調表示することができる。この結果、3次元地図M上で必要な画像Gを使用者が容易に認識することができる。
【0054】
なお、上記実施形態では、3次元地図上に画像Gを表示しているが、例えば都市部等においては高層建築物等が多数存在するために画像Gが隠れてしまい、見えにくくなることが考えられる。この場合には、3次元地図上の建物全体、あるいは画像Gと視点との間に存在する建物の高さを低くする、あるいは0(例えば正射投影画像等)にして表示することが好ましい。
【0055】
図7には、実施形態にかかる制御装置16の動作例のフローが示される。本システムにおける処理は、撮影装置10のシャッターに同期あるいは非同期で撮影対象の画像情報、撮影位置と撮影対象との距離データ、撮影方向の方位角及び仰俯角並びに撮影位置の座標情報を取得するデータ取得処理と、上記データ取得処理終了後に各取得データを確認し、欠測があればこれを補間した上で、撮影対象の座標情報を演算するデータ変換処理に大きく分かれている。まず、データ取得処理について説明する。図7において、撮影開始の指示が入力されると、画像情報取得部37が、撮影装置10が撮影した撮影対象の画像情報を取得し、地理情報データ変換部46に出力する(S1)。
【0056】
次に、距離情報取得部40が、角度距離計測器12が計測した撮影装置10の撮影位置と撮影対象との距離データを取得し、対象座標演算部44に出力する(S2)。また、角度情報取得部42が、角度距離計測器12が計測した撮影装置10の撮影方向の方位角及び仰俯角を取得し、対象座標演算部44に出力する(S3)。なお、距離データ取得ステップ(S2)と方位角及び仰俯角取得ステップ(S3)の順序は逆でも構わない。
【0057】
GPS情報取得部38は、撮影装置10のシャッターを動作させるトリガー信号のタイミング等に合わせて、座標計測装置14から撮影装置10の撮影位置の座標情報を取得する(S4)。次に、データ取得終了指示の有無を確認し(S5)、データ取得を終了しない場合にはS1に戻ってデータ取得を継続する。データ取得を終了する場合には、データ変換処理に移行する。この結果、撮影対象に関連する一連のデータ(撮影対象の画像情報、撮影位置と撮影対象との距離データ、撮影方向の方位角及び仰俯角並びに撮影位置の座標情報)を取得することができる。
【0058】
次に、データ変換処理について説明する。まずS4の処理において座標情報が取得できたか否かを判断し(S6)、取得できなかった場合は、対象座標演算部44にて座標情報の補間処理を行う(S7)。また、対象座標演算部44は、取得した座標情報及び補間処理で得た座標情報に前述した識別情報を付与する。
【0059】
次に、S2の処理において距離データを取得できたか否かを判断し(S8)、取得できなかった場合は対象座標演算部44にて補間処理を行う(S9)。また、対象座標演算部44は、S2で取得した距離データ及び補間処理で得た距離データに前述した識別情報を付与する。
【0060】
次に、S3の処理において角度情報を取得できたか否かを判断し(S10)、取得できなかった場合は対象座標演算部44にて補間処理を行う(S11)。また、対象座標演算部44は、S3で取得した角度情報及び補間処理で得た角度情報に前述した識別情報を付与する。
【0061】
次に、対象座標演算部44は、上記S2、S3、S4で取得された、またはS7、S9、S11で補間処理を行った、識別情報により互いに対応関係が判別された距離データ、方位角及び仰俯角のデータ及び座標情報のデータより、上述した式(1)または(式2)に基づいて、撮影対象の座標情報を演算する(S12)。
【0062】
最後に、S1において画像情報取得部37が取得した撮影対象の画像情報及びS12において対象座標演算部44が演算した座標情報は、地理情報データ変換部46が互いに関連付け、出力部48が表示装置28に表示させる(S13)。なお、上記互いに関連付けられた画像情報及び座標情報は、地理情報システムのデータとして通信装置30を介して外部のコンピュータ等に送信してもよい。
【0063】
上述した、図7の各ステップを実行するためのプログラムは、記録媒体に格納することも可能であり、また、そのプログラムを通信手段によって提供しても良い。その場合、例えば、上記説明したプログラムについて、「プログラムを記録したコンピュータ読み取り可能な記録媒体」の発明または「データ信号」の発明として捉えても良い。
【符号の説明】
【0064】
10 撮影装置、12 角度距離計測器、14 座標計測装置、16 制御装置、18 筐体、20 CPU、22 RAM、24 ROM、26 入力装置、28 表示装置、30 通信装置、32 記憶装置、34 バス、36 入出力インターフェース、37 画像情報取得部、38 GPS情報取得部、40 距離情報取得部、42 角度情報取得部、44 対象座標演算部、46 地理情報データ変換部、48 出力部、50 三次元画像表示制御部。
【特許請求の範囲】
【請求項1】
任意の撮影位置から任意の撮影方向にある撮影対象を撮影する撮影手段と、
前記撮影位置と前記撮影対象との距離を計測する距離計測手段と、
前記撮影方向の方位角を地磁気に基づいて計測する方位角計測手段と、
前記撮影方向の仰俯角を計測する仰俯角計測手段と、
前記撮影位置の座標を計測する座標計測手段と、
前記撮影位置の座標、前記距離、前記方位角及び前記仰俯角に基づき、前記撮影対象の座標情報を演算する撮影対象座標演算手段と、
を備えることを特徴とする撮影対象位置特定装置。
【請求項2】
請求項1記載の撮影対象位置特定装置において、前記距離計測手段は、レーザー距離計であることを特徴とする撮影対象位置特定装置。
【請求項3】
請求項1または請求項2記載の撮影対象位置特定装置と、
前記撮影手段が撮影した撮影対象の画像情報と前記撮影対象座標演算手段が演算した撮影対象の座標情報とが関連付けられた地理情報システム上のデータを出力する地理情報データ出力装置と、
を備えることを特徴とする地図画像統合データベース生成システム。
【請求項4】
請求項3記載の地図画像統合データベース生成システムが、さらに前記地理情報データ出力装置が出力したデータを表示する表示装置を備えることを特徴とする地図画像統合データベース生成システム。
【請求項5】
請求項4に記載の地図画像統合データベース生成システムにおいて、前記表示装置は、前記地理情報データ出力装置が出力した画像情報を、前記方位角計測手段が計測した方位角及び前記仰俯角計測手段が計測した仰俯角に基づいて、撮影方向に直交するように傾けて3次元地図上に表示することを特徴とする地図画像統合データベース生成システム。
【請求項6】
コンピュータを、
撮影手段により任意の撮影位置から任意の撮影方向にある撮影対象を撮影した画像情報を取得する画像情報取得手段、
前記撮影位置と前記撮影対象との距離の計測結果を取得する距離情報取得手段、
前記撮影方向の方位角の計測結果を取得する方位角取得手段、
前記撮影方向の仰俯角の計測結果を取得する仰俯角取得手段、
前記撮影位置の座標情報を取得する座標情報取得手段、
前記撮影位置の座標、前記距離、前記方位角及び前記仰俯角に基づき、前記撮影対象の座標情報を演算する撮影対象座標演算手段、
として機能させることを特徴とする撮影対象位置特定プログラム。
【請求項1】
任意の撮影位置から任意の撮影方向にある撮影対象を撮影する撮影手段と、
前記撮影位置と前記撮影対象との距離を計測する距離計測手段と、
前記撮影方向の方位角を地磁気に基づいて計測する方位角計測手段と、
前記撮影方向の仰俯角を計測する仰俯角計測手段と、
前記撮影位置の座標を計測する座標計測手段と、
前記撮影位置の座標、前記距離、前記方位角及び前記仰俯角に基づき、前記撮影対象の座標情報を演算する撮影対象座標演算手段と、
を備えることを特徴とする撮影対象位置特定装置。
【請求項2】
請求項1記載の撮影対象位置特定装置において、前記距離計測手段は、レーザー距離計であることを特徴とする撮影対象位置特定装置。
【請求項3】
請求項1または請求項2記載の撮影対象位置特定装置と、
前記撮影手段が撮影した撮影対象の画像情報と前記撮影対象座標演算手段が演算した撮影対象の座標情報とが関連付けられた地理情報システム上のデータを出力する地理情報データ出力装置と、
を備えることを特徴とする地図画像統合データベース生成システム。
【請求項4】
請求項3記載の地図画像統合データベース生成システムが、さらに前記地理情報データ出力装置が出力したデータを表示する表示装置を備えることを特徴とする地図画像統合データベース生成システム。
【請求項5】
請求項4に記載の地図画像統合データベース生成システムにおいて、前記表示装置は、前記地理情報データ出力装置が出力した画像情報を、前記方位角計測手段が計測した方位角及び前記仰俯角計測手段が計測した仰俯角に基づいて、撮影方向に直交するように傾けて3次元地図上に表示することを特徴とする地図画像統合データベース生成システム。
【請求項6】
コンピュータを、
撮影手段により任意の撮影位置から任意の撮影方向にある撮影対象を撮影した画像情報を取得する画像情報取得手段、
前記撮影位置と前記撮影対象との距離の計測結果を取得する距離情報取得手段、
前記撮影方向の方位角の計測結果を取得する方位角取得手段、
前記撮影方向の仰俯角の計測結果を取得する仰俯角取得手段、
前記撮影位置の座標情報を取得する座標情報取得手段、
前記撮影位置の座標、前記距離、前記方位角及び前記仰俯角に基づき、前記撮影対象の座標情報を演算する撮影対象座標演算手段、
として機能させることを特徴とする撮影対象位置特定プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−38944(P2011−38944A)
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願番号】特願2009−187896(P2009−187896)
【出願日】平成21年8月13日(2009.8.13)
【特許番号】特許第4560128号(P4560128)
【特許公報発行日】平成22年10月13日(2010.10.13)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願日】平成21年8月13日(2009.8.13)
【特許番号】特許第4560128号(P4560128)
【特許公報発行日】平成22年10月13日(2010.10.13)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
[ Back to top ]