
地図表示装置および地図表示方法
【課題】現在位置を地図上に表示する装置において、現在位置の補正を利用者の移動手段に応じて行う。
【解決手段】地図表示装置としての携帯電話は、利用者の移動手段を判別するとともに、進行すべき経路を表す経路データをサーバから取得する。携帯電話は、利用者の移動手段に応じて現在位置を補正するための補正領域を設定する。携帯電話は、GPS受信機によって現在位置を検出すると、その現在位置が、移動手段に応じて設定された補正領域内に検出されたかを判断し、補正領域内に検出されていれば、推奨経路上の位置に現在位置を補正する。
【解決手段】地図表示装置としての携帯電話は、利用者の移動手段を判別するとともに、進行すべき経路を表す経路データをサーバから取得する。携帯電話は、利用者の移動手段に応じて現在位置を補正するための補正領域を設定する。携帯電話は、GPS受信機によって現在位置を検出すると、その現在位置が、移動手段に応じて設定された補正領域内に検出されたかを判断し、補正領域内に検出されていれば、推奨経路上の位置に現在位置を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、GPS等によって測位した現在位置を補正する技術に関する。
【背景技術】
【0002】
近年、GPS(Global Positioning System/全地球測位システム)を用いて現在位置を測位し、その位置を地図上に表示する地図表示装置が普及している。GPSを用いた測位技術では、衛星からの電波の受信状況や捕捉した衛星の数に応じて、数メートルないし数十メートルの誤差が生じてしまうことが知られている。そのため、従来の地図表示装置では、測位した現在位置に誤差が生じていた場合に、近隣の道路や経路上の位置に現在位置を強制的に補正することが行われていた(下記、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−310691号公報
【0004】
従来の地図表示装置は、車両に搭載されることを前提として設計されていることが多く、補正が行われる範囲も、車両の移動特性に合わせて設定されていた。例えば、特許文献1には、案内ルートから左右200m以内の範囲に現在位置が測位されれば、案内ルート上に現在位置を補正すると記載されている。
【0005】
しかし、近年、GPSの受信機は、携帯電話やPDA等の小型機器にも搭載されつつある。こうした小型機器は、車両内だけではなく、歩行時や自転車による移動等にも利用することが可能である。そのため、従来の現在位置の補正方法では、利用者の多様な移動手段に対応することが困難になってきている。
【発明の概要】
【発明が解決しようとする課題】
【0006】
このような問題を考慮し、本発明が解決しようとする課題は、現在位置を地図上に表示する装置において、現在位置の補正を利用者の移動手段に応じて行うことにある。
【課題を解決するための手段】
【0007】
上記課題を踏まえ、本発明の一態様である地図表示装置を次のように構成した。
【0008】
本発明の一態様である地図表示装置は、
現在位置を地図上に表示する地図表示装置であって、
進行すべき経路を示す情報を含む地図データを取得するデータ取得部と、
利用者の移動手段の種別を判別する移動手段判別部と、
現在位置を逐次検出する位置検出部と、
前記検出された現在位置を前記経路上の位置に補正する範囲である補正領域を、前記判別された移動手段の種別に応じて設定する補正領域設定部と、
前記現在位置が、前記設定された補正領域内に検出された場合に限り、該現在位置を前記経路上の位置に補正する補正部と、
前記補正された現在位置を前記地図データによって表される地図画像上に表示する表示部とを備える。
【0009】
上記態様の地図表示装置によれば、現在位置の補正を行うか否かを決定するための補正領域の範囲が、利用者の移動手段の種別に応じて設定される。従って、現在位置に測定誤差が生じた場合に、利用者の移動手段に応じた好ましい補正を行うことが可能になる。なお、表示部が画面に表示する地図画像は、ラスタ形式で表されていてもよいし、ベクトル形式で表されていてもよい。
【0010】
上記態様の地図表示装置において、前記補正領域設定部は、前記補正領域として、前記経路を中心として、左右方向に、前記移動手段の種別に応じて定められた距離だけ広がりを有する領域を設定することができる。こうすることで、経路を中心とした左右方向の補正領域の範囲を移動手段の種別に応じて可変させることが可能になる。
【0011】
上記態様の地図表示装置において、前記補正領域設定部は、前記移動手段が車両である場合に、前記補正領域として、前回補正された現在位置を後端とし、該後端から前記移動手段の種別に応じた定められた距離だけ前方に先端がある領域を設定することができる。
【0012】
車両が経路上を進行している場合にはバックをすることはほとんどないと考えられる。そのため、かかる態様のように、前回補正された現在位置を後端とする補正領域を設定すれば、前回検出された現在位置よりも後ろ側に現在位置が検出された場合に、現在位置を補正することが不要となる。この結果、表示される地図画像にブレが生じることを抑制することが可能になる。また、上記態様によれば、補正領域の経路に沿った長さが移動手段に応じて設定されるので、移動手段の速度に応じて、現在位置の補正を行う範囲を可変させることが可能になる。
【0013】
上記態様の地図表示装置において、前記補正領域設定部は、前記移動手段が徒歩である場合に、前記補正領域として、前回補正された現在位置から所定の距離だけ前方および後方に広がりを有する領域を設定することができる。
【0014】
移動手段が徒歩の場合には、歩行者は、経路上を前進するだけでなく、左右に逸れたり、逆向きに進行する可能性がある。そのため、かかる態様のように、前回補正された現在位置から後方にも補正領域を設けることで、歩行者の移動特性を考慮した補正を行うことが可能になる。なお、前回補正された現在位置から前方への距離と後方への距離は、同一である必要はない。
【0015】
上記態様の地図表示装置において、前記補正領域の先端は、前記経路上に頂点を有する三角形状に形成されてもよい。こうすることで、検出された現在位置が、前回補正された現在位置から前方に離れるほど測定誤差を許容する範囲を狭めることができる。この結果、精度の高い補正を行うことが可能になる。
【0016】
上記態様の地図表示装置において、前記補正領域設定部は、前記判別された移動手段と、前記経路の属性とに応じて前記補正領域を設定してもよい。経路の属性とは、例えば、一般道や高速道路といった道路の種別のことをいう。このような態様であれば、移動手段の種別だけではなく、経路の制限速度等の特性に応じて、補正領域を設定することが可能になる。
【0017】
上記態様の地図表示装置において、前記移動手段判別部は、前記逐次検出された現在位置の履歴に基づき、前記移動手段の種別を判別してもよい。このような態様であれば、動的に補正領域の範囲を設定することが可能になるので、ユーザは、移動手段を乗り換える度に、設定の変更を行う必要がなくなり、利便性が向上することになる。
【0018】
上記態様の地図表示装置において、前記補正領域設定部は、前記判別された移動手段の速度に応じて、前記補正領域を調整することができる。こうすることで、移動手段の種別だけではなく、その速度に応じて、動的に補正領域を調整することが可能になる。
【0019】
上記態様の地図表示装置は、更に、前記補正領域よりも外側の領域であり、前記進行すべき経路と異なる経路を取得するかを判断するためのリルート領域を、前記判別された移動手段に応じて設定するリルート領域設定部と、前記現在位置が、前記設定されたリルート領域内に検出された場合に、前記経路と異なる経路であって、該現在位置を出発地とする新たな経路を取得するリルート部とを備えてもよい。
【0020】
このような態様であれば、現在位置が、現在の経路を大きく外れ、リルート領域に検出された場合に、その現在位置を出発地とする新たな経路を取得することができる。リルート領域についても、移動手段の種別に応じて設定されるので、ユーザの利便性を更に高めることができる。
【0021】
上記態様の地図表示装置において、前記表示部は、前記現在位置が、前記補正領域よりも外側にあり、かつ、前記リルート領域よりも内側にある不感領域に検出された場合に、前記検出された現在位置をそのまま前記地図画像上に表示してもよい。
【0022】
このような態様であれば、現在位置が補正領域外に検出されたとしても、直ちに新たな経路が取得されることがない。そのため、地図表示のレスポンスが低下してしまうことを抑制することが可能になる。また、このような態様であれば、不感領域に現在位置が検出された場合に、ユーザに、経路を外れていることを示唆することができるので、ユーザは、新たな経路の取得を待つことなくスムーズに経路に復帰することが可能になる。
【0023】
上記態様の地図表示装置において、前記データ取得部は、前記地図データを、無線通信によって所定のサーバから取得することができる。このような態様であれば、地図表示装置自体に、地図データを記憶するための記憶装置を備えておく必要がないため、装置のコンパクト化や製造コストの削減を図ることが可能になる。また、地図データを所定のサーバに蓄えておくことにより、地図データの更新を容易に行うことが可能になる。
【0024】
なお、本発明は、上述した地図表示装置としての構成のほか、地図表示方法や、コンピュータプログラムとしても構成することができる。かかるコンピュータプログラムは、コンピュータが読取可能な記録媒体に記録されていてもよい。記録媒体としては、例えば、フレキシブルディスクやCD−ROM、DVD−ROM、光磁気ディスク、メモリカード、ハードディスク等の種々の媒体を利用することができる。
【図面の簡単な説明】
【0025】
【図1】地図表示システム10の概略構成を示す説明図である。
【図2】経路探索処理のフローチャートである。
【図3】地図表示処理のフローチャートである。
【図4】移動手段に応じた補正領域DAを例示する説明図である。
【図5】現在位置を補正した様子を示す説明図である。
【発明を実施するための形態】
【0026】
以下、本発明の実施の形態を実施例に基づき次の順序で説明する。
A.地図表示システムの概略構成:
B.経路探索処理:
C.地図表示処理:
D.変形例:
【0027】
A.地図表示システムの概略構成:
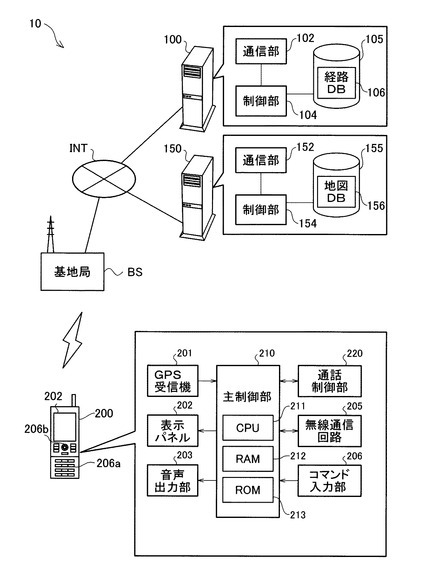
図1は、本発明の実施例としての地図表示システム10の概略構成を示す説明図である。図示するように、本実施例の地図表示システム10は、経路探索サーバ100と、地図サーバ150と、地図表示装置としての携帯電話200とを含んでいる。本実施例の携帯電話200は、GPS受信機201を備えており、これを用いて経路案内を行う機能を備えている。携帯電話200は、人が携帯する場合には歩行者用ナビゲーション装置として機能し、車両で用いる場合には、カーナビゲーション装置として機能する。
【0028】
携帯電話200は、GPS受信機201と、表示パネル202と、音声出力部203と、無線通信回路205と、コマンド入力部206と、主制御部210と、通話制御部220とを備えている。
【0029】
主制御部210は、携帯電話200の各部を制御するためのコントローラである。主制御部210は、CPU211と、RAM212と、ROM213とを備えている。CPU211は、ROM213に記憶された制御プログラムをRAM212にロードして実行することで、後述する種々の処理を実現する。主制御部210は、本願の「移動手段判別部」や「補正領域設定部」、「補正部」等に相当する。
【0030】
GPS受信機201は、GPS(Global Positioning System/全地球測位システム)を構成する人工衛星から送信された電波を受信する装置である。主制御部210は、GPS受信機201が受信した電波に基づき現在位置を検出(測位)する。主制御部210は、GPS受信機201が、3つの衛星から電波を受信することができれば、2次元的な現在位置を検出することができ、4つの衛星から電波を受信することができれば、3次元的な現在位置を検出することができる。また、5つ以上の衛星から電波を受信することができれば、高精度に現在位置を検出することができる。
【0031】
表示パネル202は、液晶ディスプレイとこれを駆動する駆動回路とを備えている。液晶ディスプレイは、たとえば、480画素×640画素(VGA)の解像度を有する。主制御部210は、表示パネル202を制御することで、地図画像や推奨経路、現在位置などを表示する。表示パネル202には、液晶ディスプレイに限らず、有機ELディスプレイなど、種々の表示装置を採用することが可能である。
【0032】
音声出力部203は、経路案内時に音声を出力するためのスピーカや、これを駆動する回路などから構成される。
【0033】
無線通信回路205は、基地局BSとの間でデータ通信もしくは音声通信を行うための回路である。基地局BSには、インターネットINTを介して経路探索サーバ100や地図サーバ150が接続されている。無線通信回路205は、基地局BSを介して、経路探索サーバ100や地図サーバ150にアクセスを行うことができる。
【0034】
通話制御部220は、音声通話のための着信や呼出、音声信号と電気信号の変換などを行う回路である。
【0035】
コマンド入力部206は、テンキー206aやカーソルキー206bなどのボタン群から構成される。ユーザは、これらのボタンを用いることで、経路探索に用いられる出発地や目的地などの入力を行うことができる。
【0036】
地図サーバ150は、通信部152と、制御部154と、記憶装置155とを備えている。記憶装置155は、地図データベース156を記憶している。通信部152は、インターネットINTを介して携帯電話200と通信を行うことができる。地図データベース156には、携帯電話200に供給する地図データがベクトル形式で記録されている。この地図データには、地形や建物、道路等の形状を表すデータが含まれている。制御部154は、携帯電話200から地図データの取得要求があると、指定された範囲の地図データを地図データベース156から検索し、通信部152を介して携帯電話200に送信する。
【0037】
経路探索サーバ100は、通信部102と、制御部104と、記憶装置105とを備えている。通信部102は、インターネットINTを介して携帯電話200と通信を行うことができる。記憶装置105には、道路のつながり状態や道路の属性が記録された経路データベース106が記憶されている。道路のつながり状態は、交差点や分岐点等の緯度経度からなるノードデータと、ノードデータを結ぶ線分によって道路を表すリンクデータとによって表されている。経路探索サーバ100は、携帯電話200から経路探索要求があると、経路データベース106を用いて、指定された出発地と目的地とを結ぶ推奨経路を探索する。そして、探索の結果、得られた推奨経路データを通信部102を介して携帯電話200に送信する。
【0038】
本実施例では、経路探索サーバ100の制御部104は、自己の記憶装置105に記憶された経路データベース106を用いて経路探索を行うものとする。しかし、経路データベース106が地図サーバ150に記憶されている場合には、インターネットINT経由で、この経路データベース106を読み込んで利用してもよい。なお、経路探索サーバ100と地図サーバ150は、一体のサーバとして構成することも可能である。地図サーバ150から携帯電話200に送信される地図データと、経路探索サーバから携帯電話200に送信される推奨経路データとは、併せて、広義の「地図データ」として捉えることが可能である。
【0039】
B.経路探索処理:
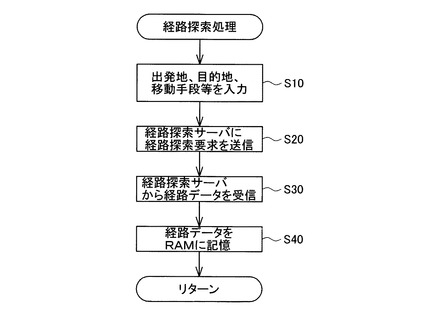
図2は、携帯電話200の主制御部210が実行する経路探索処理のフローチャートである。この処理は、ユーザが、コマンド入力部206を用いて、携帯電話200の経路案内機能を呼び出した場合に実行される処理である。
【0040】
経路探索処理が開始されると、まず、主制御部210は、コマンド入力部206を介して、ユーザから、必要に応じて、出発地、目的地、経由地、探索条件、利用する移動手段の種別等の入力を受け付ける(ステップS10)。出発地は、GPS受信機201によって検出した現在位置とすることが可能である。探索条件とは、VICS(Vehicle Information and Communication System)情報の使用の要否、出発時間や到着時間の指定、階段や屋根のある歩道を用いるか否か等の条件である。利用する移動手段は、例えば、表示パネル202に表示される「徒歩」、「自転車」、「自動車」、「電車」等の選択肢の中から、所定のGUI(グラフィカルユーザインタフェース)によって選択的に入力することができる。これらの入力を受け付けると、主制御部210は、無線通信回路205を用いて、経路探索サーバ100に、経路探索の要求信号を送信する(ステップS20)。この要求信号には、ステップS10で入力された情報が含まれている。
【0041】
経路探索サーバ100は、携帯電話200から経路探索の要求信号を受信すると、記憶部105に記憶された経路データベース106を参照して、要求信号に含まれる出発地と目的地とを結び(経由地が設定されていれば経由地を含む)、設定された探索条件を満たす推奨経路を算出する。推奨経路の算出は、例えば、周知のダイクストラ法を用いて行うことができる。経路探索サーバ100は、推奨経路を算出すると、その経路の形状を表すデータを、推奨経路データとしてベクトル形式で携帯電話200に返信する。推奨経路データには、その経路を構成する道路毎に属性情報として、その道路の種別を表す情報が記録されている。道路の種別には、例えば、一般道や高速道路といった種別が含まれている。なお、経路データベース106が移動手段毎に用意されている場合には、経路探索サーバ100は、ユーザが入力した移動手段に対応する経路データベースを用いて推奨経路を求める。こうすることで、ユーザの移動手段に適した経路を案内することができる。また、ユーザから移動手段の種別が入力されなかった場合には、デフォルトの移動手段(例えば、車両)に適した推奨経路を求めるものとしてもよい。また、出発地と目的地との距離に応じて移動手段を自動的に選択し、その移動手段に適した推奨経路を求めるものとしてもよい。例えば、出発地と目的地との距離が500m以内であれば徒歩、500m〜2kmであれば、徒歩及び車両、それ以上であれば車両、500km以上であれば、車両、電車、航空機や船舶を含む経路を探索するものとすることができる。もちろん、ユーザは、自分で移動手段を任意に選択することが可能である。
【0042】
携帯電話200の主制御部210は、経路探索サーバ100から推奨経路データを受信すると(ステップS30)、その推奨経路データをRAM212に記憶する(ステップS40)。RAM212に記憶された推奨経路データは、後述する地図表示処理において、表示パネル202上に表示される。
【0043】
C.地図表示処理:
図3は、図2に示した経路探索処理に引き続いて実行される地図表示処理のフローチャートである。本実施例では、携帯電話200の主制御部210は、この処理を、1秒に1回実行するものとする。なお、実行のタイミングは、ユーザの移動手段や移動速度に応じて変更することとしてもよい。例えば、移動手段が車両であれば、1秒間に数回実行し、徒歩であれば、数秒に1回程度実行することとすることができる。
【0044】
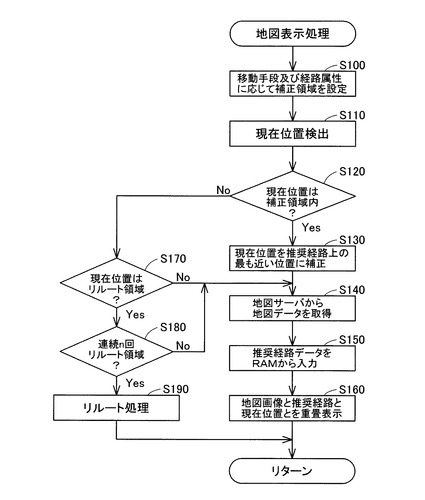
この地図表示処理が実行されると、まず、主制御部210は、ユーザの移動手段と、現在通行中の道路の属性に応じて、補正領域DAの範囲を設定する(ステップS100)。補正領域DAとは、後述するステップS110で検出した現在位置を、推奨経路上の位置に補正するか否かを決定するための領域である。現在通行中の道路の属性は、RAM212に記憶された推奨経路データを参照することで認識することができる。
【0045】
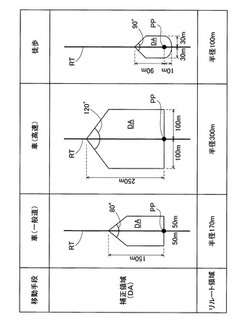
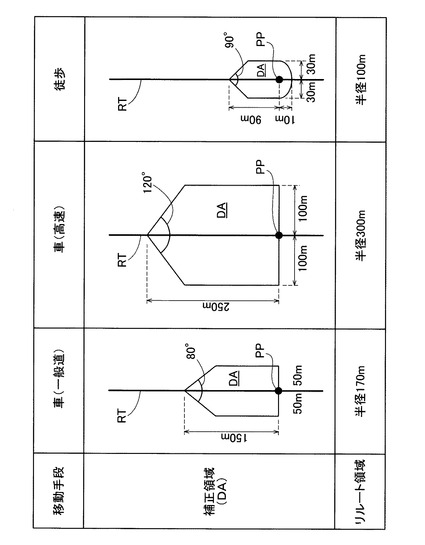
図4は、移動手段に応じた補正領域DAを例示する説明図である。図4には、移動手段が車で一般道を通行している場合の補正領域DAと、同じく移動手段が車で高速道路を通行している場合の補正領域DAと、移動手段が徒歩の場合の補正領域DAを示している。図示するように、補正領域DAは、速度の速い移動手段ほど、その面積が大きく設定される。
【0046】
例えば、移動手段が車で一般道を通行している場合には、補正領域DAは、当該地図表示処理を前回実行した結果、補正された現在位置PPから、推奨経路RTを挟んで左右方向にそれぞれ50m、推奨経路RTに沿って前方に150mの範囲を有する領域であり、先端部が80°の角度を有する三角形状に形成された領域に設定される。この先端部の頂点は、推奨経路RT上に位置している。
【0047】
移動手段が車で高速道路を通行している場合には、補正領域DAは、前回の現在位置PPから推奨経路RTを挟んで左右方向にそれぞれ100m、推奨経路RTに沿って前方に250mの領域を有し、先端部が120°の角度を有する三角形状に形成された領域に設定される。一般道を通行している場合に比べ、補正領域DAが前方向に長いのは、一般道よりも高速道路の方が移動速度が速いためであり、左右方向の広がりが大きいのは、高速道路では、経路を逸れて移動することが困難であることから、測定誤差を大きく許容することが可能なためである。
【0048】
移動手段が徒歩の場合には、補正領域DAは、前回の現在位置PPから推奨経路RTを挟んで左右方向にそれぞれ30m、経路に沿って前方90m、後方10mの領域を有し、先端部が90°の角度を有する三角形状に形成された領域に設定される。また、後方の領域は、移動手段が車の場合とは異なり、円弧状の領域に設定される。歩行者は、常に前進するとは限らず、後方に移動した場合にも現在位置の補正を行うためである。
【0049】
補正領域DAを設定すると、主制御部210は、GPS受信機201を用いて、現在位置を検出する(ステップS110)。そして、検出された現在位置が、ステップS100で設定された補正領域DA内であるか否かを判断する(ステップS120)。
【0050】
検出された現在位置が、補正領域DA内であれば(ステップS120:Yes)、主制御部210は、その現在位置を、推奨経路上の最も近い位置に補正する(ステップS130)。具体的には、主制御部210は、検出された現在位置から推奨経路RTに対して垂線を引き、その垂線と推奨経路とが交わる位置に現在位置を補正する。なお、検出された現在位置が、推奨経路RT上の位置であれば、かかるステップS130の処理はスキップしてもよい。
【0051】
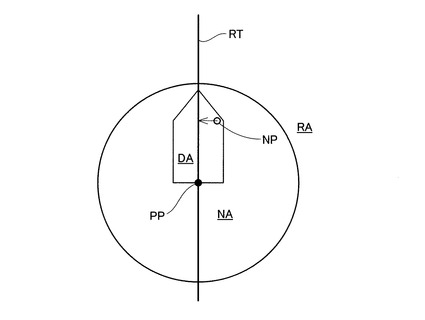
図5は、補正領域DA内に検出された現在位置を補正した様子を示す説明図である。図5には、補正領域DAの先端部付近に現在位置NPが検出された例を示している。上記ステップS130では、この現在位置NPは、図中に矢印で示した方向に移動され、推奨経路RT上の位置に補正される。
【0052】
現在位置を補正すると、主制御部210は、補正後の現在位置を含む所定の範囲(例えば、500m四方)の地図データを地図サーバから取得する(ステップS140)。現在位置周辺の地図データがRAM212にバッファリングされている場合には、主制御部210は、バッファリングされているデータの中から、現在位置に対応する地図データを取得する。取得する地図データの範囲は、ユーザが設定した地図の表示スケールに合わせて調整することができる。
【0053】
地図データを取得すると、主制御部210は、RAM212から推奨経路データを入力する(ステップS150)。この推奨経路データは、図2に示した経路探索処理において、経路探索サーバ100から受信したデータである。
【0054】
続いて、主制御部210は、ステップS140で取得したベクトル形式の地図データと、ステップS150で入力したベクトル形式の推奨経路データとを重畳させて表示パネル202に描画する。そして、更に、その上に、補正後の現在位置を示すマークを重畳させる。以上の処理によって、補正後の現在位置を地図画像上に表示することができる。
【0055】
上記ステップS120において、検出された現在位置が補正領域DA外であると判断した場合には(ステップS120:No)、主制御部210は、検出された現在位置がリルート領域RAにあるかを判断する(ステップS170)。リルート領域RAとは、図5に示すように、補正領域DAよりも外側に位置する円周外の領域である。リルート領域RAについても、補正領域DAと同様に、ユーザの移動手段(および通行中の道路の属性)に応じてその範囲が設定される。
【0056】
図4には、移動手段に応じたリルート領域RAの例を示している。図4に示すように、本実施例では、一般道を通行中の車に対しては、前回の現在位置PPから半径170mの円周外の領域が、高速道路を通行中の車に対しては、前回の現在位置PPから半径300mの円周外の領域が、徒歩の場合には、前回の現在位置PPから半径100mの円周外の領域が、リルート領域RAとして設定されるものとした。
【0057】
現在位置NPがリルート領域RAに検出されると(ステップS170:Yes)、主制御部210は、更に、現在位置NPが、連続して10回、リルート領域RAに検出されたかを判断する(ステップS180)。この回数は、ユーザの移動手段に応じて可変させるものとしてもよい。連続して10回、現在位置NPがリルート領域RAに検出された場合には(ステップS180:Yes)、主制御部210は、リルート処理を行う(ステップS190)。リルート処理とは、推奨経路を再度求めるための処理である。リルート処理の処理内容は、出発地がリルート領域RAに検出された現在位置NPとなるだけで、図2に示した経路探索処理とほぼ同様の処理内容である。
【0058】
リルート処理における出発地は、最後に検出した現在位置NPとしても良いし、10回検出した現在位置の平均位置としてもよい。また、10回のうち、最も精度が高く検出できた現在位置としてもよい。精度の優劣は、例えば、現在位置を測位した際に捕捉した衛星の数に応じて判断することができる。この場合、捕捉していた衛星の数が多いほど精度が高いといえる。他にも、例えば、精度のレベルを表すパラメータをGPS受信機201から取得することで、精度の優劣を判断することも可能である。
【0059】
ステップS170において、現在位置NPがリルート領域RAに検出されなかった場合、もしくは、ステップS180において、連続して10回、リルート領域RAに検出されなかった場合には、主制御部210は、処理をステップS140に移行する。つまり、ステップS130における現在位置NPの補正をスキップして、検出された現在位置をそのまま地図画像上に表示する(ステップS140〜S160)。こうすることで、表示パネル202には、補正されていない現在位置NPが表示されることになる。
【0060】
ステップS170やステップS180において「No」と判定された場合には、補正領域DAでもリルート領域RAでもない領域に現在位置NPが検出されたことになる。このような領域を、本実施例では、不感領域NAという(図5参照)。つまり、本実施例では、現在位置NPが不感領域NA内に検出された場合には、現在位置NPの補正もリルート処理も行うことなく、検出された現在位置NPをそのまま画面上に表示するのである。こうすることで、現在位置が補正領域DA外に検出された場合に、経路探索サーバとの通信が必須となるリルート処理が一律に行われてしまうことを防止することができる。この結果、地図画像の表示レスポンスが低下してしまうことを抑制することができる。また、不感領域NAに現在位置NPが検出された場合に、検出された現在位置NPをそのまま画面上に表示すれば、ユーザに、経路を外れていることを示唆することができる。そのため、ユーザは、リルート処理の結果を待つことなくスムーズに推奨経路に復帰することが可能になる。ユーザは、意図的に推奨経路の脇に存在する測道を通行したり、推奨経路近辺の近道や抜け道を通行する場合があるので、不感領域NAを設ければ、このような状況において頻繁にリルートが行われてしまうことを抑制することができるのである。
【0061】
以上で説明した本実施例の地図表示システムによれば、ユーザの移動手段や通行している道路の属性に応じて補正領域DAの範囲を変更することができる。そのため、移動手段の移動特性(平均速度や回転可能半径等)に応じた現在位置の補正を行うことが可能になる。
【0062】
また、本実施例では、図4に示したように、補正領域DAの先端部は、三角形状であるものとした。従って、GPS受信機201を用いて検出した現在位置NPが、前回の現在位置PPから前方に離れるほど測定誤差を許容する範囲を狭めることができる。こうすることで、精度の高い補正を行うことが可能になる。
【0063】
また、本実施例では、移動手段が車の場合には、図3に示したように、前回の現在位置PPから前方の方向にのみ補正領域DAを設定することとした。車が推奨経路RTに沿って移動している限りは、基本的に、車はバックしないと考えることができるためである。このように、前回の現在位置PPから前方の方向のみに補正領域DAを設定すれば、測定誤差によって現在位置NPが、前回の現在位置PPよりも後方に検出された場合に、地図画像上の現在位置が、推奨経路RT上を後退してしまうことを抑制することができる。この結果、表示される地図画像にブレが生じることを抑制することが可能になる。
【0064】
これに対して、移動手段が徒歩の場合には、歩行者は、経路を逆方向に移動したり、左右に移動したりする可能性がある。そこで、本実施例では、図3に示したように、移動手段が徒歩の場合には、前回の現在位置PPから後方の方向にも補正領域DAが存在するものとした。そのため、歩行者が、推奨経路RTを逆方向に移動した場合においても、正しく、現在位置を表示することが可能になる。
【0065】
また、本実施例では、現在位置が補正領域DAに検出された場合には、現在位置を推奨経路上に補正し、不感領域NAに検出された場合には、検出された現在位置をそのまま表示する。また、リルート領域RAに検出された場合にはリルート処理を行う。そのため、検出された現在位置と推奨経路RTとの位置関係に応じて、好ましい地図表示を行うことが可能になる。
【0066】
D.変形例:
以上、本発明の実施例について説明したが、本発明はこのような実施例に限定されず、その趣旨を逸脱しない範囲で種々の構成を採ることができることはいうまでもない。例えば、図4に示した補正領域やリルート範囲を規定する数値や形状は一例であり、適宜、他の数値や形状を設定することが可能である。また、上述した実施例では、地図データと推奨経路データとは、ベクトル形式のデータとしたが、ラスタ形式のデータであってもよい。その他、以下のような変形が可能である。
【0067】
(D1)変形例1:
上記実施例では、主制御部210は、ユーザの移動手段を、ユーザからの入力を受けて判別することとした(図2のステップS10参照)。これに対して、例えば、主制御部210は、逐次検出した現在位置の履歴と測位の時間間隔から平均速度を求め、この平均速度に応じて、ユーザの移動手段を推定することとしてもよい。例えば、平均速度が20km/h以上であれば「車」、10km/h未満であれば「徒歩」、10〜20km/hであれば「自転車」などと推定することができる。
【0068】
(D2)変形例2:
上記実施例では、ユーザの移動手段に応じて補正領域DAの範囲が設定されるものとした。これに加えて、補正領域DAは、移動手段の速度に応じて調整されるものとしてもよい。例えば、主制御部210は、逐次検出した現在位置の履歴と測位の時間間隔から平均速度を求め、この平均速度が速いほど補正領域DAの前後方向の長さを長くすることが可能である。こうすることで、例えば、移動手段が同じ「車」であっても、軽自動車やスポーツカーといった車種の違いによって、異なる補正領域DAを適用することが可能になる。
【0069】
(D3)変形例3:
図4には、移動手段が車と徒歩の場合の補正領域DAを示した。しかし、これら以外にも、例えば、移動手段が自転車や列車の場合の補正領域DAが規定されていてもよい。また、図4の例によれば、移動手段が徒歩の場合にも、車の場合とほぼ同様の形状の補正領域DAが設定されることになる。しかし、徒歩の場合には、補正領域DAは、円形や楕円形の領域に設定されることとしてもよい。人は、必ずしも、推奨経路に沿って前進するとは限らず、左右方向に寄り道したり、後ろを向いて推奨経路とは逆方向に進む可能性があるからである。
【0070】
(D4)変形例4:
上記実施例では、移動手段に応じて補正領域DAの範囲が設定されることとした。これに対して、補正領域DAの範囲は、例えば、地図の表示モードに応じて可変させるものとしてもよい。地図の表示モードとしては、上記実施例のように経路の案内を行う「経路案内モード」や、経路の案内を行わずに現在位置の表示のみを行う「現在位置表示モード」がある。例えば、「経路案内モード」では、図4に示したように多角形状の補正領域DAを設定し、「現在位置表示モード」では、円状の補正領域DAを設定することが可能である。「現在位置表示モード」では、推奨経路が存在しないため、移動手段がどの方向に進むかが不明であり、また、推奨経路が存在しないと、図4のように、経路に沿った補正領域DAを規定することができないためである。このように、地図の表示モードに応じて補正領域DAを可変させることとすれば、ユーザの利便性を更に向上させることが可能になる。
【0071】
(D5)変形例5:
上述した実施例では、地図表示装置として、携帯電話200を適用した例を説明した。しかし、地図表示装置としては、携帯電話200に限らず、周知のカーナビゲーションシステムやPDA、パーソナルコンピュータ等を適用することが可能である。
【0072】
(D6)変形例6:
上述した実施例では、経路の探索は、経路探索サーバ100が行うこととした。これに対して、経路データベースの記録されたフラッシュメモリ等の記憶装置を携帯電話200に実装し、この記憶装置内の経路データベースを用いることで、携帯電話200自体が経路探索を行うこととしてもよい。また、この記憶装置内に地図データも含まれていれば、その地図データを用いて、地図を描画することとしてもよい。
【0073】
(D7)変形例7:
上述した実施例では、GPS受信機201単体で現在位置を測位することとした。しかし、現在位置の測位は、例えば、GPS受信機201と車速センサや加速度センサを併用して行うこととしてもよい。
【符号の説明】
【0074】
10…地図表示システム
100…経路探索サーバ
102…通信部
104…制御部
105…記憶装置
106…経路データベース
150…地図サーバ
152…通信部
154…制御部
155…記憶装置
156…地図データベース
200…携帯電話
201…GPS受信機
202…表示パネル
203…音声出力部
205…無線通信回路
206…コマンド入力部
210…主制御部
211…CPU
212…RAM
213…ROM
220…通話制御部
NA…不感領域
DA…補正領域
RA…リルート領域
BS…基地局
RT…推奨経路
【技術分野】
【0001】
本発明は、GPS等によって測位した現在位置を補正する技術に関する。
【背景技術】
【0002】
近年、GPS(Global Positioning System/全地球測位システム)を用いて現在位置を測位し、その位置を地図上に表示する地図表示装置が普及している。GPSを用いた測位技術では、衛星からの電波の受信状況や捕捉した衛星の数に応じて、数メートルないし数十メートルの誤差が生じてしまうことが知られている。そのため、従来の地図表示装置では、測位した現在位置に誤差が生じていた場合に、近隣の道路や経路上の位置に現在位置を強制的に補正することが行われていた(下記、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−310691号公報
【0004】
従来の地図表示装置は、車両に搭載されることを前提として設計されていることが多く、補正が行われる範囲も、車両の移動特性に合わせて設定されていた。例えば、特許文献1には、案内ルートから左右200m以内の範囲に現在位置が測位されれば、案内ルート上に現在位置を補正すると記載されている。
【0005】
しかし、近年、GPSの受信機は、携帯電話やPDA等の小型機器にも搭載されつつある。こうした小型機器は、車両内だけではなく、歩行時や自転車による移動等にも利用することが可能である。そのため、従来の現在位置の補正方法では、利用者の多様な移動手段に対応することが困難になってきている。
【発明の概要】
【発明が解決しようとする課題】
【0006】
このような問題を考慮し、本発明が解決しようとする課題は、現在位置を地図上に表示する装置において、現在位置の補正を利用者の移動手段に応じて行うことにある。
【課題を解決するための手段】
【0007】
上記課題を踏まえ、本発明の一態様である地図表示装置を次のように構成した。
【0008】
本発明の一態様である地図表示装置は、
現在位置を地図上に表示する地図表示装置であって、
進行すべき経路を示す情報を含む地図データを取得するデータ取得部と、
利用者の移動手段の種別を判別する移動手段判別部と、
現在位置を逐次検出する位置検出部と、
前記検出された現在位置を前記経路上の位置に補正する範囲である補正領域を、前記判別された移動手段の種別に応じて設定する補正領域設定部と、
前記現在位置が、前記設定された補正領域内に検出された場合に限り、該現在位置を前記経路上の位置に補正する補正部と、
前記補正された現在位置を前記地図データによって表される地図画像上に表示する表示部とを備える。
【0009】
上記態様の地図表示装置によれば、現在位置の補正を行うか否かを決定するための補正領域の範囲が、利用者の移動手段の種別に応じて設定される。従って、現在位置に測定誤差が生じた場合に、利用者の移動手段に応じた好ましい補正を行うことが可能になる。なお、表示部が画面に表示する地図画像は、ラスタ形式で表されていてもよいし、ベクトル形式で表されていてもよい。
【0010】
上記態様の地図表示装置において、前記補正領域設定部は、前記補正領域として、前記経路を中心として、左右方向に、前記移動手段の種別に応じて定められた距離だけ広がりを有する領域を設定することができる。こうすることで、経路を中心とした左右方向の補正領域の範囲を移動手段の種別に応じて可変させることが可能になる。
【0011】
上記態様の地図表示装置において、前記補正領域設定部は、前記移動手段が車両である場合に、前記補正領域として、前回補正された現在位置を後端とし、該後端から前記移動手段の種別に応じた定められた距離だけ前方に先端がある領域を設定することができる。
【0012】
車両が経路上を進行している場合にはバックをすることはほとんどないと考えられる。そのため、かかる態様のように、前回補正された現在位置を後端とする補正領域を設定すれば、前回検出された現在位置よりも後ろ側に現在位置が検出された場合に、現在位置を補正することが不要となる。この結果、表示される地図画像にブレが生じることを抑制することが可能になる。また、上記態様によれば、補正領域の経路に沿った長さが移動手段に応じて設定されるので、移動手段の速度に応じて、現在位置の補正を行う範囲を可変させることが可能になる。
【0013】
上記態様の地図表示装置において、前記補正領域設定部は、前記移動手段が徒歩である場合に、前記補正領域として、前回補正された現在位置から所定の距離だけ前方および後方に広がりを有する領域を設定することができる。
【0014】
移動手段が徒歩の場合には、歩行者は、経路上を前進するだけでなく、左右に逸れたり、逆向きに進行する可能性がある。そのため、かかる態様のように、前回補正された現在位置から後方にも補正領域を設けることで、歩行者の移動特性を考慮した補正を行うことが可能になる。なお、前回補正された現在位置から前方への距離と後方への距離は、同一である必要はない。
【0015】
上記態様の地図表示装置において、前記補正領域の先端は、前記経路上に頂点を有する三角形状に形成されてもよい。こうすることで、検出された現在位置が、前回補正された現在位置から前方に離れるほど測定誤差を許容する範囲を狭めることができる。この結果、精度の高い補正を行うことが可能になる。
【0016】
上記態様の地図表示装置において、前記補正領域設定部は、前記判別された移動手段と、前記経路の属性とに応じて前記補正領域を設定してもよい。経路の属性とは、例えば、一般道や高速道路といった道路の種別のことをいう。このような態様であれば、移動手段の種別だけではなく、経路の制限速度等の特性に応じて、補正領域を設定することが可能になる。
【0017】
上記態様の地図表示装置において、前記移動手段判別部は、前記逐次検出された現在位置の履歴に基づき、前記移動手段の種別を判別してもよい。このような態様であれば、動的に補正領域の範囲を設定することが可能になるので、ユーザは、移動手段を乗り換える度に、設定の変更を行う必要がなくなり、利便性が向上することになる。
【0018】
上記態様の地図表示装置において、前記補正領域設定部は、前記判別された移動手段の速度に応じて、前記補正領域を調整することができる。こうすることで、移動手段の種別だけではなく、その速度に応じて、動的に補正領域を調整することが可能になる。
【0019】
上記態様の地図表示装置は、更に、前記補正領域よりも外側の領域であり、前記進行すべき経路と異なる経路を取得するかを判断するためのリルート領域を、前記判別された移動手段に応じて設定するリルート領域設定部と、前記現在位置が、前記設定されたリルート領域内に検出された場合に、前記経路と異なる経路であって、該現在位置を出発地とする新たな経路を取得するリルート部とを備えてもよい。
【0020】
このような態様であれば、現在位置が、現在の経路を大きく外れ、リルート領域に検出された場合に、その現在位置を出発地とする新たな経路を取得することができる。リルート領域についても、移動手段の種別に応じて設定されるので、ユーザの利便性を更に高めることができる。
【0021】
上記態様の地図表示装置において、前記表示部は、前記現在位置が、前記補正領域よりも外側にあり、かつ、前記リルート領域よりも内側にある不感領域に検出された場合に、前記検出された現在位置をそのまま前記地図画像上に表示してもよい。
【0022】
このような態様であれば、現在位置が補正領域外に検出されたとしても、直ちに新たな経路が取得されることがない。そのため、地図表示のレスポンスが低下してしまうことを抑制することが可能になる。また、このような態様であれば、不感領域に現在位置が検出された場合に、ユーザに、経路を外れていることを示唆することができるので、ユーザは、新たな経路の取得を待つことなくスムーズに経路に復帰することが可能になる。
【0023】
上記態様の地図表示装置において、前記データ取得部は、前記地図データを、無線通信によって所定のサーバから取得することができる。このような態様であれば、地図表示装置自体に、地図データを記憶するための記憶装置を備えておく必要がないため、装置のコンパクト化や製造コストの削減を図ることが可能になる。また、地図データを所定のサーバに蓄えておくことにより、地図データの更新を容易に行うことが可能になる。
【0024】
なお、本発明は、上述した地図表示装置としての構成のほか、地図表示方法や、コンピュータプログラムとしても構成することができる。かかるコンピュータプログラムは、コンピュータが読取可能な記録媒体に記録されていてもよい。記録媒体としては、例えば、フレキシブルディスクやCD−ROM、DVD−ROM、光磁気ディスク、メモリカード、ハードディスク等の種々の媒体を利用することができる。
【図面の簡単な説明】
【0025】
【図1】地図表示システム10の概略構成を示す説明図である。
【図2】経路探索処理のフローチャートである。
【図3】地図表示処理のフローチャートである。
【図4】移動手段に応じた補正領域DAを例示する説明図である。
【図5】現在位置を補正した様子を示す説明図である。
【発明を実施するための形態】
【0026】
以下、本発明の実施の形態を実施例に基づき次の順序で説明する。
A.地図表示システムの概略構成:
B.経路探索処理:
C.地図表示処理:
D.変形例:
【0027】
A.地図表示システムの概略構成:
図1は、本発明の実施例としての地図表示システム10の概略構成を示す説明図である。図示するように、本実施例の地図表示システム10は、経路探索サーバ100と、地図サーバ150と、地図表示装置としての携帯電話200とを含んでいる。本実施例の携帯電話200は、GPS受信機201を備えており、これを用いて経路案内を行う機能を備えている。携帯電話200は、人が携帯する場合には歩行者用ナビゲーション装置として機能し、車両で用いる場合には、カーナビゲーション装置として機能する。
【0028】
携帯電話200は、GPS受信機201と、表示パネル202と、音声出力部203と、無線通信回路205と、コマンド入力部206と、主制御部210と、通話制御部220とを備えている。
【0029】
主制御部210は、携帯電話200の各部を制御するためのコントローラである。主制御部210は、CPU211と、RAM212と、ROM213とを備えている。CPU211は、ROM213に記憶された制御プログラムをRAM212にロードして実行することで、後述する種々の処理を実現する。主制御部210は、本願の「移動手段判別部」や「補正領域設定部」、「補正部」等に相当する。
【0030】
GPS受信機201は、GPS(Global Positioning System/全地球測位システム)を構成する人工衛星から送信された電波を受信する装置である。主制御部210は、GPS受信機201が受信した電波に基づき現在位置を検出(測位)する。主制御部210は、GPS受信機201が、3つの衛星から電波を受信することができれば、2次元的な現在位置を検出することができ、4つの衛星から電波を受信することができれば、3次元的な現在位置を検出することができる。また、5つ以上の衛星から電波を受信することができれば、高精度に現在位置を検出することができる。
【0031】
表示パネル202は、液晶ディスプレイとこれを駆動する駆動回路とを備えている。液晶ディスプレイは、たとえば、480画素×640画素(VGA)の解像度を有する。主制御部210は、表示パネル202を制御することで、地図画像や推奨経路、現在位置などを表示する。表示パネル202には、液晶ディスプレイに限らず、有機ELディスプレイなど、種々の表示装置を採用することが可能である。
【0032】
音声出力部203は、経路案内時に音声を出力するためのスピーカや、これを駆動する回路などから構成される。
【0033】
無線通信回路205は、基地局BSとの間でデータ通信もしくは音声通信を行うための回路である。基地局BSには、インターネットINTを介して経路探索サーバ100や地図サーバ150が接続されている。無線通信回路205は、基地局BSを介して、経路探索サーバ100や地図サーバ150にアクセスを行うことができる。
【0034】
通話制御部220は、音声通話のための着信や呼出、音声信号と電気信号の変換などを行う回路である。
【0035】
コマンド入力部206は、テンキー206aやカーソルキー206bなどのボタン群から構成される。ユーザは、これらのボタンを用いることで、経路探索に用いられる出発地や目的地などの入力を行うことができる。
【0036】
地図サーバ150は、通信部152と、制御部154と、記憶装置155とを備えている。記憶装置155は、地図データベース156を記憶している。通信部152は、インターネットINTを介して携帯電話200と通信を行うことができる。地図データベース156には、携帯電話200に供給する地図データがベクトル形式で記録されている。この地図データには、地形や建物、道路等の形状を表すデータが含まれている。制御部154は、携帯電話200から地図データの取得要求があると、指定された範囲の地図データを地図データベース156から検索し、通信部152を介して携帯電話200に送信する。
【0037】
経路探索サーバ100は、通信部102と、制御部104と、記憶装置105とを備えている。通信部102は、インターネットINTを介して携帯電話200と通信を行うことができる。記憶装置105には、道路のつながり状態や道路の属性が記録された経路データベース106が記憶されている。道路のつながり状態は、交差点や分岐点等の緯度経度からなるノードデータと、ノードデータを結ぶ線分によって道路を表すリンクデータとによって表されている。経路探索サーバ100は、携帯電話200から経路探索要求があると、経路データベース106を用いて、指定された出発地と目的地とを結ぶ推奨経路を探索する。そして、探索の結果、得られた推奨経路データを通信部102を介して携帯電話200に送信する。
【0038】
本実施例では、経路探索サーバ100の制御部104は、自己の記憶装置105に記憶された経路データベース106を用いて経路探索を行うものとする。しかし、経路データベース106が地図サーバ150に記憶されている場合には、インターネットINT経由で、この経路データベース106を読み込んで利用してもよい。なお、経路探索サーバ100と地図サーバ150は、一体のサーバとして構成することも可能である。地図サーバ150から携帯電話200に送信される地図データと、経路探索サーバから携帯電話200に送信される推奨経路データとは、併せて、広義の「地図データ」として捉えることが可能である。
【0039】
B.経路探索処理:
図2は、携帯電話200の主制御部210が実行する経路探索処理のフローチャートである。この処理は、ユーザが、コマンド入力部206を用いて、携帯電話200の経路案内機能を呼び出した場合に実行される処理である。
【0040】
経路探索処理が開始されると、まず、主制御部210は、コマンド入力部206を介して、ユーザから、必要に応じて、出発地、目的地、経由地、探索条件、利用する移動手段の種別等の入力を受け付ける(ステップS10)。出発地は、GPS受信機201によって検出した現在位置とすることが可能である。探索条件とは、VICS(Vehicle Information and Communication System)情報の使用の要否、出発時間や到着時間の指定、階段や屋根のある歩道を用いるか否か等の条件である。利用する移動手段は、例えば、表示パネル202に表示される「徒歩」、「自転車」、「自動車」、「電車」等の選択肢の中から、所定のGUI(グラフィカルユーザインタフェース)によって選択的に入力することができる。これらの入力を受け付けると、主制御部210は、無線通信回路205を用いて、経路探索サーバ100に、経路探索の要求信号を送信する(ステップS20)。この要求信号には、ステップS10で入力された情報が含まれている。
【0041】
経路探索サーバ100は、携帯電話200から経路探索の要求信号を受信すると、記憶部105に記憶された経路データベース106を参照して、要求信号に含まれる出発地と目的地とを結び(経由地が設定されていれば経由地を含む)、設定された探索条件を満たす推奨経路を算出する。推奨経路の算出は、例えば、周知のダイクストラ法を用いて行うことができる。経路探索サーバ100は、推奨経路を算出すると、その経路の形状を表すデータを、推奨経路データとしてベクトル形式で携帯電話200に返信する。推奨経路データには、その経路を構成する道路毎に属性情報として、その道路の種別を表す情報が記録されている。道路の種別には、例えば、一般道や高速道路といった種別が含まれている。なお、経路データベース106が移動手段毎に用意されている場合には、経路探索サーバ100は、ユーザが入力した移動手段に対応する経路データベースを用いて推奨経路を求める。こうすることで、ユーザの移動手段に適した経路を案内することができる。また、ユーザから移動手段の種別が入力されなかった場合には、デフォルトの移動手段(例えば、車両)に適した推奨経路を求めるものとしてもよい。また、出発地と目的地との距離に応じて移動手段を自動的に選択し、その移動手段に適した推奨経路を求めるものとしてもよい。例えば、出発地と目的地との距離が500m以内であれば徒歩、500m〜2kmであれば、徒歩及び車両、それ以上であれば車両、500km以上であれば、車両、電車、航空機や船舶を含む経路を探索するものとすることができる。もちろん、ユーザは、自分で移動手段を任意に選択することが可能である。
【0042】
携帯電話200の主制御部210は、経路探索サーバ100から推奨経路データを受信すると(ステップS30)、その推奨経路データをRAM212に記憶する(ステップS40)。RAM212に記憶された推奨経路データは、後述する地図表示処理において、表示パネル202上に表示される。
【0043】
C.地図表示処理:
図3は、図2に示した経路探索処理に引き続いて実行される地図表示処理のフローチャートである。本実施例では、携帯電話200の主制御部210は、この処理を、1秒に1回実行するものとする。なお、実行のタイミングは、ユーザの移動手段や移動速度に応じて変更することとしてもよい。例えば、移動手段が車両であれば、1秒間に数回実行し、徒歩であれば、数秒に1回程度実行することとすることができる。
【0044】
この地図表示処理が実行されると、まず、主制御部210は、ユーザの移動手段と、現在通行中の道路の属性に応じて、補正領域DAの範囲を設定する(ステップS100)。補正領域DAとは、後述するステップS110で検出した現在位置を、推奨経路上の位置に補正するか否かを決定するための領域である。現在通行中の道路の属性は、RAM212に記憶された推奨経路データを参照することで認識することができる。
【0045】
図4は、移動手段に応じた補正領域DAを例示する説明図である。図4には、移動手段が車で一般道を通行している場合の補正領域DAと、同じく移動手段が車で高速道路を通行している場合の補正領域DAと、移動手段が徒歩の場合の補正領域DAを示している。図示するように、補正領域DAは、速度の速い移動手段ほど、その面積が大きく設定される。
【0046】
例えば、移動手段が車で一般道を通行している場合には、補正領域DAは、当該地図表示処理を前回実行した結果、補正された現在位置PPから、推奨経路RTを挟んで左右方向にそれぞれ50m、推奨経路RTに沿って前方に150mの範囲を有する領域であり、先端部が80°の角度を有する三角形状に形成された領域に設定される。この先端部の頂点は、推奨経路RT上に位置している。
【0047】
移動手段が車で高速道路を通行している場合には、補正領域DAは、前回の現在位置PPから推奨経路RTを挟んで左右方向にそれぞれ100m、推奨経路RTに沿って前方に250mの領域を有し、先端部が120°の角度を有する三角形状に形成された領域に設定される。一般道を通行している場合に比べ、補正領域DAが前方向に長いのは、一般道よりも高速道路の方が移動速度が速いためであり、左右方向の広がりが大きいのは、高速道路では、経路を逸れて移動することが困難であることから、測定誤差を大きく許容することが可能なためである。
【0048】
移動手段が徒歩の場合には、補正領域DAは、前回の現在位置PPから推奨経路RTを挟んで左右方向にそれぞれ30m、経路に沿って前方90m、後方10mの領域を有し、先端部が90°の角度を有する三角形状に形成された領域に設定される。また、後方の領域は、移動手段が車の場合とは異なり、円弧状の領域に設定される。歩行者は、常に前進するとは限らず、後方に移動した場合にも現在位置の補正を行うためである。
【0049】
補正領域DAを設定すると、主制御部210は、GPS受信機201を用いて、現在位置を検出する(ステップS110)。そして、検出された現在位置が、ステップS100で設定された補正領域DA内であるか否かを判断する(ステップS120)。
【0050】
検出された現在位置が、補正領域DA内であれば(ステップS120:Yes)、主制御部210は、その現在位置を、推奨経路上の最も近い位置に補正する(ステップS130)。具体的には、主制御部210は、検出された現在位置から推奨経路RTに対して垂線を引き、その垂線と推奨経路とが交わる位置に現在位置を補正する。なお、検出された現在位置が、推奨経路RT上の位置であれば、かかるステップS130の処理はスキップしてもよい。
【0051】
図5は、補正領域DA内に検出された現在位置を補正した様子を示す説明図である。図5には、補正領域DAの先端部付近に現在位置NPが検出された例を示している。上記ステップS130では、この現在位置NPは、図中に矢印で示した方向に移動され、推奨経路RT上の位置に補正される。
【0052】
現在位置を補正すると、主制御部210は、補正後の現在位置を含む所定の範囲(例えば、500m四方)の地図データを地図サーバから取得する(ステップS140)。現在位置周辺の地図データがRAM212にバッファリングされている場合には、主制御部210は、バッファリングされているデータの中から、現在位置に対応する地図データを取得する。取得する地図データの範囲は、ユーザが設定した地図の表示スケールに合わせて調整することができる。
【0053】
地図データを取得すると、主制御部210は、RAM212から推奨経路データを入力する(ステップS150)。この推奨経路データは、図2に示した経路探索処理において、経路探索サーバ100から受信したデータである。
【0054】
続いて、主制御部210は、ステップS140で取得したベクトル形式の地図データと、ステップS150で入力したベクトル形式の推奨経路データとを重畳させて表示パネル202に描画する。そして、更に、その上に、補正後の現在位置を示すマークを重畳させる。以上の処理によって、補正後の現在位置を地図画像上に表示することができる。
【0055】
上記ステップS120において、検出された現在位置が補正領域DA外であると判断した場合には(ステップS120:No)、主制御部210は、検出された現在位置がリルート領域RAにあるかを判断する(ステップS170)。リルート領域RAとは、図5に示すように、補正領域DAよりも外側に位置する円周外の領域である。リルート領域RAについても、補正領域DAと同様に、ユーザの移動手段(および通行中の道路の属性)に応じてその範囲が設定される。
【0056】
図4には、移動手段に応じたリルート領域RAの例を示している。図4に示すように、本実施例では、一般道を通行中の車に対しては、前回の現在位置PPから半径170mの円周外の領域が、高速道路を通行中の車に対しては、前回の現在位置PPから半径300mの円周外の領域が、徒歩の場合には、前回の現在位置PPから半径100mの円周外の領域が、リルート領域RAとして設定されるものとした。
【0057】
現在位置NPがリルート領域RAに検出されると(ステップS170:Yes)、主制御部210は、更に、現在位置NPが、連続して10回、リルート領域RAに検出されたかを判断する(ステップS180)。この回数は、ユーザの移動手段に応じて可変させるものとしてもよい。連続して10回、現在位置NPがリルート領域RAに検出された場合には(ステップS180:Yes)、主制御部210は、リルート処理を行う(ステップS190)。リルート処理とは、推奨経路を再度求めるための処理である。リルート処理の処理内容は、出発地がリルート領域RAに検出された現在位置NPとなるだけで、図2に示した経路探索処理とほぼ同様の処理内容である。
【0058】
リルート処理における出発地は、最後に検出した現在位置NPとしても良いし、10回検出した現在位置の平均位置としてもよい。また、10回のうち、最も精度が高く検出できた現在位置としてもよい。精度の優劣は、例えば、現在位置を測位した際に捕捉した衛星の数に応じて判断することができる。この場合、捕捉していた衛星の数が多いほど精度が高いといえる。他にも、例えば、精度のレベルを表すパラメータをGPS受信機201から取得することで、精度の優劣を判断することも可能である。
【0059】
ステップS170において、現在位置NPがリルート領域RAに検出されなかった場合、もしくは、ステップS180において、連続して10回、リルート領域RAに検出されなかった場合には、主制御部210は、処理をステップS140に移行する。つまり、ステップS130における現在位置NPの補正をスキップして、検出された現在位置をそのまま地図画像上に表示する(ステップS140〜S160)。こうすることで、表示パネル202には、補正されていない現在位置NPが表示されることになる。
【0060】
ステップS170やステップS180において「No」と判定された場合には、補正領域DAでもリルート領域RAでもない領域に現在位置NPが検出されたことになる。このような領域を、本実施例では、不感領域NAという(図5参照)。つまり、本実施例では、現在位置NPが不感領域NA内に検出された場合には、現在位置NPの補正もリルート処理も行うことなく、検出された現在位置NPをそのまま画面上に表示するのである。こうすることで、現在位置が補正領域DA外に検出された場合に、経路探索サーバとの通信が必須となるリルート処理が一律に行われてしまうことを防止することができる。この結果、地図画像の表示レスポンスが低下してしまうことを抑制することができる。また、不感領域NAに現在位置NPが検出された場合に、検出された現在位置NPをそのまま画面上に表示すれば、ユーザに、経路を外れていることを示唆することができる。そのため、ユーザは、リルート処理の結果を待つことなくスムーズに推奨経路に復帰することが可能になる。ユーザは、意図的に推奨経路の脇に存在する測道を通行したり、推奨経路近辺の近道や抜け道を通行する場合があるので、不感領域NAを設ければ、このような状況において頻繁にリルートが行われてしまうことを抑制することができるのである。
【0061】
以上で説明した本実施例の地図表示システムによれば、ユーザの移動手段や通行している道路の属性に応じて補正領域DAの範囲を変更することができる。そのため、移動手段の移動特性(平均速度や回転可能半径等)に応じた現在位置の補正を行うことが可能になる。
【0062】
また、本実施例では、図4に示したように、補正領域DAの先端部は、三角形状であるものとした。従って、GPS受信機201を用いて検出した現在位置NPが、前回の現在位置PPから前方に離れるほど測定誤差を許容する範囲を狭めることができる。こうすることで、精度の高い補正を行うことが可能になる。
【0063】
また、本実施例では、移動手段が車の場合には、図3に示したように、前回の現在位置PPから前方の方向にのみ補正領域DAを設定することとした。車が推奨経路RTに沿って移動している限りは、基本的に、車はバックしないと考えることができるためである。このように、前回の現在位置PPから前方の方向のみに補正領域DAを設定すれば、測定誤差によって現在位置NPが、前回の現在位置PPよりも後方に検出された場合に、地図画像上の現在位置が、推奨経路RT上を後退してしまうことを抑制することができる。この結果、表示される地図画像にブレが生じることを抑制することが可能になる。
【0064】
これに対して、移動手段が徒歩の場合には、歩行者は、経路を逆方向に移動したり、左右に移動したりする可能性がある。そこで、本実施例では、図3に示したように、移動手段が徒歩の場合には、前回の現在位置PPから後方の方向にも補正領域DAが存在するものとした。そのため、歩行者が、推奨経路RTを逆方向に移動した場合においても、正しく、現在位置を表示することが可能になる。
【0065】
また、本実施例では、現在位置が補正領域DAに検出された場合には、現在位置を推奨経路上に補正し、不感領域NAに検出された場合には、検出された現在位置をそのまま表示する。また、リルート領域RAに検出された場合にはリルート処理を行う。そのため、検出された現在位置と推奨経路RTとの位置関係に応じて、好ましい地図表示を行うことが可能になる。
【0066】
D.変形例:
以上、本発明の実施例について説明したが、本発明はこのような実施例に限定されず、その趣旨を逸脱しない範囲で種々の構成を採ることができることはいうまでもない。例えば、図4に示した補正領域やリルート範囲を規定する数値や形状は一例であり、適宜、他の数値や形状を設定することが可能である。また、上述した実施例では、地図データと推奨経路データとは、ベクトル形式のデータとしたが、ラスタ形式のデータであってもよい。その他、以下のような変形が可能である。
【0067】
(D1)変形例1:
上記実施例では、主制御部210は、ユーザの移動手段を、ユーザからの入力を受けて判別することとした(図2のステップS10参照)。これに対して、例えば、主制御部210は、逐次検出した現在位置の履歴と測位の時間間隔から平均速度を求め、この平均速度に応じて、ユーザの移動手段を推定することとしてもよい。例えば、平均速度が20km/h以上であれば「車」、10km/h未満であれば「徒歩」、10〜20km/hであれば「自転車」などと推定することができる。
【0068】
(D2)変形例2:
上記実施例では、ユーザの移動手段に応じて補正領域DAの範囲が設定されるものとした。これに加えて、補正領域DAは、移動手段の速度に応じて調整されるものとしてもよい。例えば、主制御部210は、逐次検出した現在位置の履歴と測位の時間間隔から平均速度を求め、この平均速度が速いほど補正領域DAの前後方向の長さを長くすることが可能である。こうすることで、例えば、移動手段が同じ「車」であっても、軽自動車やスポーツカーといった車種の違いによって、異なる補正領域DAを適用することが可能になる。
【0069】
(D3)変形例3:
図4には、移動手段が車と徒歩の場合の補正領域DAを示した。しかし、これら以外にも、例えば、移動手段が自転車や列車の場合の補正領域DAが規定されていてもよい。また、図4の例によれば、移動手段が徒歩の場合にも、車の場合とほぼ同様の形状の補正領域DAが設定されることになる。しかし、徒歩の場合には、補正領域DAは、円形や楕円形の領域に設定されることとしてもよい。人は、必ずしも、推奨経路に沿って前進するとは限らず、左右方向に寄り道したり、後ろを向いて推奨経路とは逆方向に進む可能性があるからである。
【0070】
(D4)変形例4:
上記実施例では、移動手段に応じて補正領域DAの範囲が設定されることとした。これに対して、補正領域DAの範囲は、例えば、地図の表示モードに応じて可変させるものとしてもよい。地図の表示モードとしては、上記実施例のように経路の案内を行う「経路案内モード」や、経路の案内を行わずに現在位置の表示のみを行う「現在位置表示モード」がある。例えば、「経路案内モード」では、図4に示したように多角形状の補正領域DAを設定し、「現在位置表示モード」では、円状の補正領域DAを設定することが可能である。「現在位置表示モード」では、推奨経路が存在しないため、移動手段がどの方向に進むかが不明であり、また、推奨経路が存在しないと、図4のように、経路に沿った補正領域DAを規定することができないためである。このように、地図の表示モードに応じて補正領域DAを可変させることとすれば、ユーザの利便性を更に向上させることが可能になる。
【0071】
(D5)変形例5:
上述した実施例では、地図表示装置として、携帯電話200を適用した例を説明した。しかし、地図表示装置としては、携帯電話200に限らず、周知のカーナビゲーションシステムやPDA、パーソナルコンピュータ等を適用することが可能である。
【0072】
(D6)変形例6:
上述した実施例では、経路の探索は、経路探索サーバ100が行うこととした。これに対して、経路データベースの記録されたフラッシュメモリ等の記憶装置を携帯電話200に実装し、この記憶装置内の経路データベースを用いることで、携帯電話200自体が経路探索を行うこととしてもよい。また、この記憶装置内に地図データも含まれていれば、その地図データを用いて、地図を描画することとしてもよい。
【0073】
(D7)変形例7:
上述した実施例では、GPS受信機201単体で現在位置を測位することとした。しかし、現在位置の測位は、例えば、GPS受信機201と車速センサや加速度センサを併用して行うこととしてもよい。
【符号の説明】
【0074】
10…地図表示システム
100…経路探索サーバ
102…通信部
104…制御部
105…記憶装置
106…経路データベース
150…地図サーバ
152…通信部
154…制御部
155…記憶装置
156…地図データベース
200…携帯電話
201…GPS受信機
202…表示パネル
203…音声出力部
205…無線通信回路
206…コマンド入力部
210…主制御部
211…CPU
212…RAM
213…ROM
220…通話制御部
NA…不感領域
DA…補正領域
RA…リルート領域
BS…基地局
RT…推奨経路
【特許請求の範囲】
【請求項1】
現在位置を地図上に表示する地図表示装置であって、
進行すべき経路を示す情報を含む地図データを取得するデータ取得部と、
利用者の移動手段の種別を判別する移動手段判別部と、
現在位置を逐次検出する位置検出部と、
前記検出された現在位置を前記経路上の位置に補正する範囲である補正領域を、前記判別された移動手段の種別に応じて設定する補正領域設定部と、
前記現在位置が、前記設定された補正領域内に検出された場合に限り、該現在位置を前記経路上の位置に補正する補正部と、
前記補正された現在位置を前記地図データによって表される地図画像上に表示する表示部と
を備える地図表示装置。
【請求項2】
請求項1に記載の地図表示装置であって、
前記補正領域設定部は、前記補正領域として、前記経路を中心として、左右方向に、前記移動手段の種別に応じて定められた距離だけ広がりを有する領域を設定する
地図表示装置。
【請求項3】
請求項2に記載の地図表示装置であって、
前記補正領域設定部は、前記移動手段が車両である場合に、前記補正領域として、前回補正された現在位置を後端とし、該後端から前記移動手段の種別に応じた定められた距離だけ前方に先端がある領域を設定する
地図表示装置。
【請求項4】
請求項2に記載の地図表示装置であって、
前記補正領域設定部は、前記移動手段が徒歩である場合に、前記補正領域として、前回補正された現在位置から所定の距離だけ前方および後方に広がりを有する領域を設定する
地図表示装置。
【請求項5】
請求項2ないし請求項4のいずれかに記載の地図表示装置であって、
前記補正領域の先端は、前記経路上に頂点を有する三角形状に形成されている
地図表示装置。
【請求項6】
請求項1ないし請求項5のいずれかに記載の地図表示装置であって、
前記補正領域設定部は、前記判別された移動手段の種別と、前記経路の属性とに応じて前記補正領域を設定する
地図表示装置。
【請求項7】
請求項1ないし請求項6のいずれかに記載の地図表示装置であって、
前記移動手段判別部は、前記逐次検出された現在位置の履歴に基づき、前記移動手段の種別を判別する
地図表示装置。
【請求項8】
請求項1ないし請求項7のいずれかに記載の地図表示装置であって、
前記補正領域設定部は、前記判別された移動手段の速度に応じて、前記補正領域を調整する
地図表示装置。
【請求項9】
請求項1ないし請求項8のいずれかに記載の地図表示装置であって、更に、
前記補正領域よりも外側の領域であり、前記進行すべき経路と異なる経路を取得するかを判断するためのリルート領域を、前記判別された移動手段に応じて設定するリルート領域設定部と、
前記現在位置が、前記設定されたリルート領域内に検出された場合に、前記経路と異なる経路であって、該現在位置を出発地とする新たな経路を取得するリルート部と
を備える地図表示装置。
【請求項10】
請求項9に記載の地図表示装置であって、
前記表示部は、前記現在位置が、前記補正領域よりも外側にあり、かつ、前記リルート領域よりも内側にある不感領域に検出された場合に、前記検出された現在位置をそのまま前記地図画像上に表示する
地図表示装置。
【請求項11】
請求項1ないし請求項10のいずれかに記載の地図表示装置であって、
前記データ取得部は、前記地図データを、無線通信によって所定のサーバから取得する
地図表示装置。
【請求項12】
コンピュータが現在位置を地図上に表示する地図表示方法であって、
進行すべき経路を示す情報を含む地図データを取得し、
利用者の移動手段の種別を判別し、
現在位置を逐次検出し、
前記検出された現在位置を前記経路上の位置に補正する範囲である補正領域を、前記判別された移動手段の種別に応じて設定し、
前記現在位置が、前記設定された補正領域内に検出された場合に限り、該現在位置を前記経路上の位置に補正し、
前記補正された現在位置を前記地図データによって表される地図画像上に表示する
地図表示方法。
【請求項13】
コンピュータが現在位置を地図上に表示するためのコンピュータプログラムであって、
進行すべき経路を示す情報を含む地図データを取得するデータ取得機能と、
利用者の移動手段を判別する移動手段判別機能と、
現在位置を逐次検出する位置検出機能と、
前記検出された現在位置を前記経路上の位置に補正する範囲である補正領域を、前記判別された移動手段の種別に応じて設定する補正領域設定機能と、
前記現在位置が、前記設定された補正領域内に検出された場合に限り、該現在位置を前記経路上の位置に補正する補正機能と、
前記補正された現在位置を前記地図データによって表される地図画像上に表示する表示機能と
をコンピュータに実現させるコンピュータプログラム。
【請求項14】
請求項13に記載のコンピュータプログラムを記録したコンピュータ読み取り可能な記録媒体。
【請求項1】
現在位置を地図上に表示する地図表示装置であって、
進行すべき経路を示す情報を含む地図データを取得するデータ取得部と、
利用者の移動手段の種別を判別する移動手段判別部と、
現在位置を逐次検出する位置検出部と、
前記検出された現在位置を前記経路上の位置に補正する範囲である補正領域を、前記判別された移動手段の種別に応じて設定する補正領域設定部と、
前記現在位置が、前記設定された補正領域内に検出された場合に限り、該現在位置を前記経路上の位置に補正する補正部と、
前記補正された現在位置を前記地図データによって表される地図画像上に表示する表示部と
を備える地図表示装置。
【請求項2】
請求項1に記載の地図表示装置であって、
前記補正領域設定部は、前記補正領域として、前記経路を中心として、左右方向に、前記移動手段の種別に応じて定められた距離だけ広がりを有する領域を設定する
地図表示装置。
【請求項3】
請求項2に記載の地図表示装置であって、
前記補正領域設定部は、前記移動手段が車両である場合に、前記補正領域として、前回補正された現在位置を後端とし、該後端から前記移動手段の種別に応じた定められた距離だけ前方に先端がある領域を設定する
地図表示装置。
【請求項4】
請求項2に記載の地図表示装置であって、
前記補正領域設定部は、前記移動手段が徒歩である場合に、前記補正領域として、前回補正された現在位置から所定の距離だけ前方および後方に広がりを有する領域を設定する
地図表示装置。
【請求項5】
請求項2ないし請求項4のいずれかに記載の地図表示装置であって、
前記補正領域の先端は、前記経路上に頂点を有する三角形状に形成されている
地図表示装置。
【請求項6】
請求項1ないし請求項5のいずれかに記載の地図表示装置であって、
前記補正領域設定部は、前記判別された移動手段の種別と、前記経路の属性とに応じて前記補正領域を設定する
地図表示装置。
【請求項7】
請求項1ないし請求項6のいずれかに記載の地図表示装置であって、
前記移動手段判別部は、前記逐次検出された現在位置の履歴に基づき、前記移動手段の種別を判別する
地図表示装置。
【請求項8】
請求項1ないし請求項7のいずれかに記載の地図表示装置であって、
前記補正領域設定部は、前記判別された移動手段の速度に応じて、前記補正領域を調整する
地図表示装置。
【請求項9】
請求項1ないし請求項8のいずれかに記載の地図表示装置であって、更に、
前記補正領域よりも外側の領域であり、前記進行すべき経路と異なる経路を取得するかを判断するためのリルート領域を、前記判別された移動手段に応じて設定するリルート領域設定部と、
前記現在位置が、前記設定されたリルート領域内に検出された場合に、前記経路と異なる経路であって、該現在位置を出発地とする新たな経路を取得するリルート部と
を備える地図表示装置。
【請求項10】
請求項9に記載の地図表示装置であって、
前記表示部は、前記現在位置が、前記補正領域よりも外側にあり、かつ、前記リルート領域よりも内側にある不感領域に検出された場合に、前記検出された現在位置をそのまま前記地図画像上に表示する
地図表示装置。
【請求項11】
請求項1ないし請求項10のいずれかに記載の地図表示装置であって、
前記データ取得部は、前記地図データを、無線通信によって所定のサーバから取得する
地図表示装置。
【請求項12】
コンピュータが現在位置を地図上に表示する地図表示方法であって、
進行すべき経路を示す情報を含む地図データを取得し、
利用者の移動手段の種別を判別し、
現在位置を逐次検出し、
前記検出された現在位置を前記経路上の位置に補正する範囲である補正領域を、前記判別された移動手段の種別に応じて設定し、
前記現在位置が、前記設定された補正領域内に検出された場合に限り、該現在位置を前記経路上の位置に補正し、
前記補正された現在位置を前記地図データによって表される地図画像上に表示する
地図表示方法。
【請求項13】
コンピュータが現在位置を地図上に表示するためのコンピュータプログラムであって、
進行すべき経路を示す情報を含む地図データを取得するデータ取得機能と、
利用者の移動手段を判別する移動手段判別機能と、
現在位置を逐次検出する位置検出機能と、
前記検出された現在位置を前記経路上の位置に補正する範囲である補正領域を、前記判別された移動手段の種別に応じて設定する補正領域設定機能と、
前記現在位置が、前記設定された補正領域内に検出された場合に限り、該現在位置を前記経路上の位置に補正する補正機能と、
前記補正された現在位置を前記地図データによって表される地図画像上に表示する表示機能と
をコンピュータに実現させるコンピュータプログラム。
【請求項14】
請求項13に記載のコンピュータプログラムを記録したコンピュータ読み取り可能な記録媒体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−98300(P2012−98300A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2012−419(P2012−419)
【出願日】平成24年1月5日(2012.1.5)
【分割の表示】特願2007−208968(P2007−208968)の分割
【原出願日】平成19年8月10日(2007.8.10)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(500578216)株式会社ゼンリンデータコム (231)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成24年1月5日(2012.1.5)
【分割の表示】特願2007−208968(P2007−208968)の分割
【原出願日】平成19年8月10日(2007.8.10)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(500578216)株式会社ゼンリンデータコム (231)
【Fターム(参考)】
[ Back to top ]