
地図表示装置が地図データを処理するためのコンピュータプログラム、地図表示装置及び方法
【課題】GPS機能及びジャイロスコープを搭載した可搬型情報処理装置を用いた地図表示装置において、GPSで現在位置が測位できないときに好適な表示を行う。
【解決手段】GPS受信機が受信したGPS信号に基づいて、移動体の現在位置が検出されると(S200:Yes)、検出された現在位置に応じて、表示部の地図画像上に現在位置を表示させる(S202)。GPS信号に基づいた位置検出ができないとき、位置検出が不能になる以前の移動体の状態及び位置検出が不能になった以降のジャイロスコープの出力に基づいて、移動体の現在位置を推定する(S206)。推定された現在位置と道路との乖離が所定距離以上であれば、前記推定された現在位置に応じた現在位置の表示を行わない(S212)。
【解決手段】GPS受信機が受信したGPS信号に基づいて、移動体の現在位置が検出されると(S200:Yes)、検出された現在位置に応じて、表示部の地図画像上に現在位置を表示させる(S202)。GPS信号に基づいた位置検出ができないとき、位置検出が不能になる以前の移動体の状態及び位置検出が不能になった以降のジャイロスコープの出力に基づいて、移動体の現在位置を推定する(S206)。推定された現在位置と道路との乖離が所定距離以上であれば、前記推定された現在位置に応じた現在位置の表示を行わない(S212)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、情報処理装置、特に汎用性のある可搬型情報処理装置で実行される地図データを処理するためのコンピュータプログラム、方法及び地図表示装置に関する。
【背景技術】
【0002】
従来、地図表示装置として、例えば、カーナビゲーション装置やPND(Personal/Portable
Navigation Device)等が知られている。
【0003】
車載用のカーナビゲーション専用装置では、GPS(Global
Positioning System)等によって検出した現在位置を用いるだけでなく、ジャイロスコープが検出した車両の回転角、及び車両から取得した速度情報も活用して、車両の現在の状態を判定している。その結果、高精度で車両の状態を判定することができ、車両の現在位置を道路リンクに対応付けるリンクマッチング、及び車両の進行方向が上になるように地図を表示させるヘディングアップなどの表示も高精度で行うことができる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、近年では、携帯電話機に代表される可搬型情報処理装置であっても、地図データを処理するためのコンピュータプログラムを実行できるものがある。これらの情報処理装置は、GPSなどによる位置検出機能に加えて、ジャイロスコープを搭載するものまで登場している。
【0005】
そこで、本発明の目的は、ジャイロスコープを搭載した可搬型情報処理装置を用いて、表示精度の高い地図表示装置を実現するための技術を提供することである。
【0006】
本発明の別の目的は、GPS機能及びジャイロスコープを搭載した可搬型情報処理装置を用いた地図表示装置において、GPSで現在位置が測位できないときに好適な表示を行うことである。
【課題を解決するための手段】
【0007】
本発明の一つの実施態様に従う地図画像表示装置が地図データを処理するためのコンピュータプログラムは、地図画像を表示するための地図データを記憶した地図記憶部と、前記地図データに基づく地図画像を表示する表示部と、移動体の向きの変位角を検出するジャイロスコープと、GPS信号を受信するGPS受信機と、を備えた地図画像表示装置に実行させると、前記GPS受信機が受信したGPS信号に基づいて、前記移動体の現在位置を検出する位置検出ステップと、前記GPS信号に基づいた位置検出ができないとき、位置検出が不能になる以前の前記移動体の状態及び位置検出が不能になった以降のジャイロスコープの出力に基づいて、前記移動体の現在位置を推定する位置推定ステップと、前記位置検出ステップによって検出された現在位置または前記位置推定ステップによって推定された現在位置に応じて、前記表示部の地図画像上に現在位置を表示させる表示ステップであって、前記推定された現在位置と道路との乖離が所定距離以上であれば、前記推定された現在位置に応じた現在位置の表示を行わない、前記表示ステップと、が行われる。
【0008】
好適な実施形態では、前記位置推定ステップは、前記GPS信号に基づいた移動体の位置検出が不能となった第1の時刻以前の前記移動体の走行速度、及び前記第1の時刻以降のジャイロスコープ7の出力に基づいて現在位置を推定するようにしてもよい。
【0009】
好適な実施形態では、前記位置推定ステップは、前記第1の時刻以前の前記移動体の走行速度が所定速度以上であるときに現在位置の推定を行うようにしてもよい。
【図面の簡単な説明】
【0010】
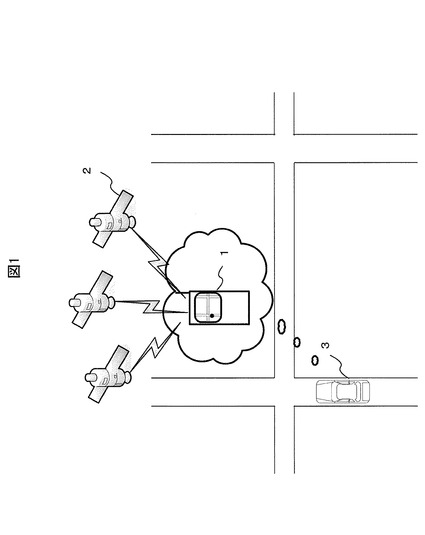
【図1】本発明の一実施形態に係るコンピュータプログラムがインストールされた地図表示装置の利用形態の説明図である。
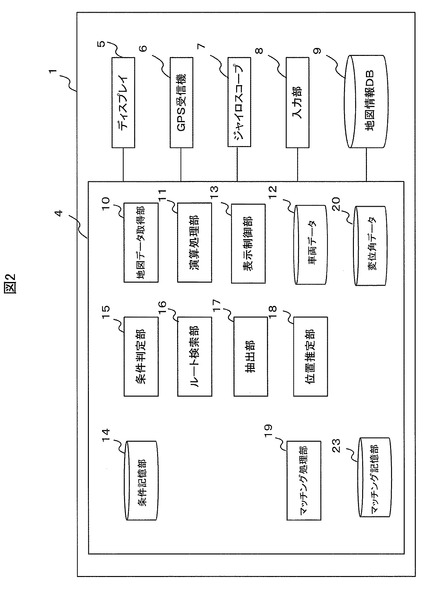
【図2】地図表示装置1の構成図である。
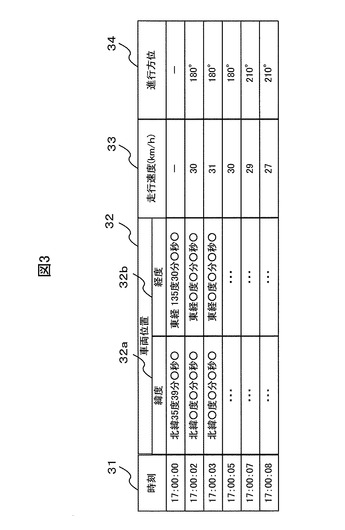
【図3】車両データ記憶部12のデータ構造の一例を示す図である。
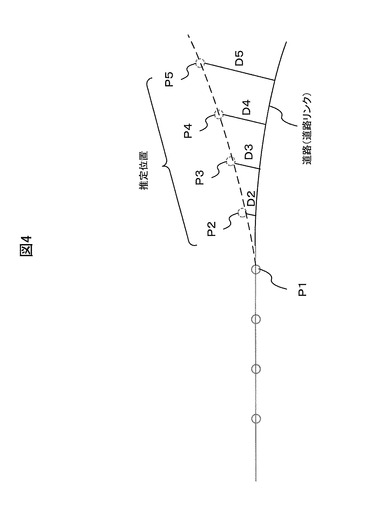
【図4】推定された現在位置と道路との乖離についての説明図である。
【図5】マッチング記憶部23のデータ構造の一例を示す図である。
【図6】リンクマッチングの説明図である。
【図7】ナビゲーションを行うときのヘディングアップ処理の手順を示すフローチャートである。
【図8】GPS測位ができないときの現在位置の推定処理を行う場合を含む、現在位置を地図画像上に表示する処理の手順を示すフローチャートである。
【図9】リンクマッチングによって、直進性のない不連続な道路リンクにマッチングされたミスマッチを検出して修正する処理手順を示すフローチャートである。
【発明を実施するための形態】
【0011】
以下、本発明の好適な実施形態に係る地図表示装置について説明する。本実施形態に係る地図表示装置1は、携帯電話機などの可搬型情報処理装置に、所定のコンピュータプログラムを実行させることにより実現される。以下に説明する実施形態では、携帯電話機にカーナビゲーション用のプログラムが実行された場合を例にとって説明するが、実行されるプログラムは、例えば歩行者用のナビゲーションプログラム等でもよいし、単に現在位置を含む地図を表示するプログラムであってもよい。
【0012】
図1は、本実施形態に係る地図表示装置1の利用形態の一例を示す図である。本実施形態に係る地図表示装置1は、例えば、車両3などの移動体に搭載して使用することができる。地図表示装置1は、現在位置を検出する手段として、GPS衛星2からのGPS信号を受信するGPS受信機を備えてもよい。地図表示装置1を車両3に搭載して使用するときは、例えば、地図表示装置1を車両3のインストルメントパネル上のフォルダに着脱自在に固定してもよいし、ユーザ(例えば助手席の人)が手で持っていてもよい。
【0013】
図2は、地図表示装置1の構成図である。
【0014】
地図表示装置1は、地図データ処理部4、ディスプレイ5、GPS受信機6、ジャイロスコープ7、入力部8及び地図情報データベース(以下、地図情報DBという)9を備える。地図データ処理部4は、携帯電話機の図示しないプロセッサ及びメモリを用いて所定のプログラムを実行することにより実現される。
【0015】
GPS受信機6は、複数のGPS衛星2からGPS信号を受信する。GPS受信機6は、受信したGPS信号を地図データ処理部4の演算処理部11へ通知する。
【0016】
ジャイロスコープ7は車両3の進行方向の変位角を検出して出力する。例えば、ジャイロスコープ7は、所定の時間間隔でその間に変位した変位角を出力する。変位角は、例えば、zyzオイラー角で表現されていてもよい。本実施形態では、ナビゲーションに利用するため、鉛直方向と垂直な2次元平面内での変位角を用いることとする。ジャイロスコープ7が検出した変位角は、変位角データ記憶部20に検出された時刻とともに保存される。
【0017】
ディスプレイ5は、例えば液晶ディスプレイなどでよい。ディスプレイ5及び入力部8は、外見上一体となったタッチパネル式の入出力装置であってもよい。ディスプレイ5には、後述する表示制御部13の制御に従って、地図画像、地図表示装置1の現在位置及びナビゲーションのためのルート等が表示される。
【0018】
入力部8は、例えば、ポインティングデバイス、入力キー、タッチセンサなどでよい。ユーザは、入力部8を操作して出発地及び目的地を入力する。入力部8から入力された情報は、後述する地図データ処理部4のルート検索部16へ送信される。
【0019】
地図情報DB9には、地図データが記憶されている。地図データには、ディスプレイ5上に地図画像を表示するための地図画像データと、道路を道路リンク及びノードで表したリンクデータが含まれる。地図情報DB9には、例えば、ネットワークを通じて取得された地図データが一時的に記憶されてもよいし、また例えば、日本道路地図のように所定地域の地図データが常に格納されていてもよい。
【0020】
地図データ処理部4は、地図データ取得部10、演算処理部11、車両データ記憶部12、表示制御部13、条件記憶部14と、条件判定部15と、ルート検索部16と、抽出部17と、位置推定部18と、マッチング処理部19と、変位角データ記憶部20と、マッチング記憶部23とを備える。地図データ処理部4内の各構成要素を以下に説明する。
【0021】
地図データ取得部10は、現在位置周辺の地図データを地図情報DB9から取得する。地図データ取得部10は、現在位置周辺の地図データを地図情報DB9から取得するため、最新の時刻31の車両位置32(図3参照)を車両データ記憶部12から取得し、この車両位置32を現在位置としてもよい。この場合、例えば、地図データ取得部10は現在位置を中心とし、ディスプレイ5に表示される範囲の地図データを取得してもよい。また、地図データ取得部10は、既にディスプレイ5に表示されている地図画像を更新するときは、表示されている地図画像との差分データのみを取得するようにしてもよい。
【0022】
車両データ記憶部12は、車両3の移動に関する車両データを記憶する。図3は、車両データ記憶部12のデータ構造の一例を示す。車両データには、例えば、時刻31と、それぞれの時刻における車両位置32と、走行速度33と、進行方位34とを含む。車両位置32は、緯度32a及び経度32bにより特定される。車両位置32、走行速度33、及び進行方位34は、以下に説明する演算処理部11により算出される。
【0023】
演算処理部11は、複数の異なる時刻において、各時刻における地図表示装置1の現在位置を検出する。例えば、演算処理部11は、GPS受信機6から通知されたGPS信号から、地図表示装置1の位置を検出してもよい。この位置は、例えば、GPS信号から算出された地図表示装置1のその時点での緯度32a及び経度32bを含む。なお、本実施形態では、地図表示装置1が車両3に搭載されている場合を扱うので、地図表示装置1の位置を車両位置として扱う。
【0024】
演算処理部11はまた、各時刻における地図表示装置1の位置を示す車両位置32を車両データ記憶部12に保存する。例えば、演算処理部11は、検出した車両位置32をそのときの時刻31に対応付けて車両データ記憶部12に記憶する。
【0025】
演算処理部11は、車両データ記憶部12に記憶されている車両位置32に基づいて、地図表示装置1を搭載している車両3の走行速度33を算出する。演算処理部11は、車両データ記憶部12を参照し、異なる時刻31及び各時刻31での車両位置32から、地図表示装置1の走行速度33を算出してもよい。例えば、演算処理部11は、ある時刻の車両位置32及びその時刻31と、それ以前に検出された一つ以上の車両位置32及びその時刻31とに基づいて走行速度33を算出する。演算処理部11は、算出した走行速度33を車両データ記憶部12に記憶してもよい。例えば、図3の例では、演算処理部11は、時刻31が「17:00:00」のときの車両位置32と、検出時刻31が「17:00:02」のときの車両位置32とからこの間の走行速度33を算出し、算出された走行速度33「30km/h」を、時刻31が「17:00:02」のときの走行速度33として記憶している。
【0026】
演算処理部11は、車両データ記憶部12に記憶されている車両位置32に基づいて、地図表示装置1が進行している進行方位を検出する。演算処理部11は、車両データ記憶部12を参照し、異なる時刻の車両位置32から、地図表示装置1の進行した方位を算出してもよい。例えば、演算処理部11は、ある時刻の車両位置32及びそれ以前に検出された一つ以上の車両位置32に基づいて進行方位34を算出する。進行方位34は、例えば北を基準(0度)として全方位360度で算出してもよい。演算処理部11は、算出した地図表示装置1の進行方位34を車両データ記憶部12に記憶してもよい。例えば、図3の例では、演算処理部11は、検出時刻31が「17:00:00」のときの車両位置32と、検出時刻31が「17:00:02」のときの車両位置32とから進行方位34を算出し、算出された第2方位「180°」を、時刻31が「17:00:02」のときの進行方位34として記憶している。
【0027】
変位角データ記憶部20には、ジャイロスコープ7が検出した変位角が、その検出時刻とともに記憶される。
【0028】
表示制御部13は、地図データ取得部10から受信した地図データに基づき、ディスプレイ5に地図画像を表示する。さらに、表示制御部13は、車両データ記憶部12から最新の時刻31における車両位置32を取得し、その車両位置32を地図表示装置1の現在位置として、地図画像に重ねて表示する。
【0029】
表示制御部13は、車両の進行方位34及び/またはジャイロスコープ7が検出した変位角に応じて、地図データに基づく地図画像をディスプレイ5に表示させる。例えば、表示制御部13は、車両3がその時点で進行している方位が所定の基準方向へ向くように、地図画像の表示方向を変更してディスプレイ5に表示させてもよい。この基準方向がディスプレイ5の上方向であるとき、いわゆるヘッディングアップ表示となる。
【0030】
車両3の進行方向は、例えば、ある基準時刻での進行方位34を基準進行方位とし、その基準進行方位に基準時刻以降にジャイロスコープ7が出力した変位角を加算して定めてもよい。基準進行方位は、後述するルート検索部16がルートを設定した後、その設定されたルートに従うナビゲーションの開始時の進行方位34であってもよい。ジャイロスコープ7では、絶対的な方位を知ることができないので、GPS測位によって得られる進行方位34で基準方位を定めてから、ジャイロスコープ7の出力を活用する。
【0031】
表示制御部13は、ナビゲーション開始時に、ジャイロスコープ7の出力を使用せず、GPS測位の結果得られた進行方位34に基づいてヘディングアップ(以下、「GPSベースのヘディングアップアップ」と称する)を行う。そして、所定のジャイロ使用開始条件を満たした後、表示制御部13は、基準進行方位とジャイロスコープ7の変位角を用いたヘディングアップアップ(以下、「ジャイロベースのヘディングアップアップ」と称する)へ切り替える。ここで、ジャイロ使用開始条件とは、例えば、GPSによって測位された車両位置32の数、走行速度33、ナビゲーション開始からの経過時間などが所定の基準値に達しているか否かとしてもよい。例えば、ナビゲーション開始時から一定時間が経過するまで、走行速度33が所定速度(例えば15km/h)に達するまで、または、車両位置32の数が所定数に達するまでは、GPSベースのヘディングアップアップを行い、それ以降はジャイロベースのヘディングアップアップを行うようにしてもよい。
【0032】
なお、ここでは、ナビゲーション開始時に基準進行方位を設定するとしているが、これは、携帯電話機で地図表示装置1のためのアプリケーションが開始された後、ナビゲーションを開始する以前の任意のタイミングに行ってもよい。例えば、ルートを設定していなくても、GPS測位を行っていれば(例えばフリーナビの動作開始時)、そのときに行ってもよい。
【0033】
表示制御部13は、ヘディングアップの切替条件に従って、GPSベースのヘディングアップを行うか、または、ジャイロベースのヘディングアップアップを行うかの切替を行ってもよい。このヘディングアップの切替条件は、条件記憶部14に記憶され、それを満たすか否かが条件判定部15によって判定される。
【0034】
例えば、ナビゲーション開始後、一旦ジャイロベースのヘディングアップアップに切り替わった後は、所定速度(例えば40km/h)を境にして、走行速度33がその速度以上のときはGPSベースのへディングアップアップ、その速度未満のときはジャイロベースのへディングアップアップを行うようにしてもよい。これにより、主に低速時にジャイロベースのヘディングアップを適用することができる。車両3の方向が大きく変わるのは一般に低速時であるから、そのときにジャイロスコープ7の出力に基づくヘディングアップを行うことで、地図表示を現実の車両3の動きによく追従させることができる。
【0035】
さらには、このGPSベースのヘッディングアップとジャイロベースのヘディングアップとの切替を行う閾値となる速度は可変であってもよい。例えば、渋滞している道路にいる場合には、渋滞していない道路にいる場合よりも閾値となる速度を低くしてもよい。道路が渋滞しているか否かの判定は、例えば、外部システムから取得する渋滞情報に基づいて行ってもよいし、一定時間以上、渋滞判定の閾値となる速度以下であるときに渋滞していると判定してもよい。
【0036】
条件記憶部14には、ヘディングアップの表示方法の切替を行うための切替条件が記憶される。切替条件は、例えば、条件判定部15が判定する条件である。切替条件は、走行速度に基づいた条件や進行方向の変化に基づく条件であってもよい。例えば、切替条件は、「走行速度が閾値以上である」、「現在位置が高速道路上である」、「現在位置が屈曲ポイント周辺ではない」等のように、GPSベースの表示切替を実行する条件を設定してもよい。条件記憶部14に記憶される条件は予め登録しておいてもよいし、使用の都度登録してもよい。また、登録してある条件の中から、ユーザが使用の際に適宜選択してもよい。
【0037】
条件判定部15は、切替条件が満たされたか否かの判定を行う。例えば、条件判定部15は、条件記憶部14に複数の切替条件が記憶されているときは、それぞれの切替条件が満たされているか否かの判定を行う。このとき、条件判定部15は、切替条件の判定のために必要なデータ等を取得してもよい。条件判定部15は、判定結果を表示制御部13に通知する。
【0038】
例えば、「走行速度が閾値以上である」という切替条件の判定を行う場合には、条件判定部15は、車両データ記憶部12を参照し、現在(最新の時刻31)の走行速度33を取得する。そして、条件判定部15は、現在の走行速度33が、閾値として設定されている速度以上であるか否かを判定する。
【0039】
また、「現在位置が高速道路上である」という切替条件の判定を行う場合には、条件判定部15は、車両データ記憶部12を参照して、現在(最新の時刻31)の車両位置32を取得する。そして、地図DBを参照して、この車両位置32が高速道路上であるか否かを判定する。
【0040】
さらには、「現在位置が屈曲ポイント周辺でない」という切替条件の判定を行う場合には、条件判定部15は、車両データ記憶部12を参照し、現在(最新の時刻31)の車両位置32を取得する。そして、条件判定部15は、現在の車両位置32が抽出部17によって抽出された屈曲ポイントから所定距離以内であるか否かを判定する。抽出部17による屈曲ポイント抽出処理については後述する。
【0041】
条件判定部15によって切替条件が満たされていると判定された場合には、表示制御部13は、ジャイロスコープ7の出力を用いずに、進行方位34に基づいて地図画像をディスプレイ5に表示させる。例えば、表示制御部13は、GPSベースのヘディングアップを行う。
【0042】
一方で、条件判定部15によって切替条件が満たされていないと判定された場合には、表示制御部13は、ジャイロスコープ7の出力に基づいて、ディスプレイ5に表示させる地図画像の表示方向を定める。例えば、表示制御部13は、ジャイロベースのヘディングアップを行う。
【0043】
複数の切替条件があるとき、表示制御部13は、すべての切替条件が満たされていない状態から一つの切替条件が満たされたときに上述のような表示に変更してもよいし、すべての切替条件が満たされたときに変更してもよい。また、表示制御部13は、すべての切替条件が満たされている状態から一つの条件が満たされなくなったときに、上述のように表示を変更してもよいし、すべての条件が満たされなくなったときに変更してもよい。
【0044】
ルート検索部16は、出発地及び目的地が指定されると、出発地から目的地までのルートを検索を行って、ルートを設定する。出発地は、例えば現在位置であってもよいし、また例えばユーザ設定したスタート地点であってもよい。ルート検索部16は、検索したルートを表示制御部13及び抽出部17へ通知する。
【0045】
表示制御部13は、ルート検索部16が設定したルートの通知を受けたときは、通知のあったルートを、ディスプレイ5上の地図画像に反映する。
【0046】
抽出部17は、ルート検索部16が検索したルート内に、交差点などで所定角度以上曲がる屈曲ポイントを検索し、その地点の位置データを抽出する。抽出部17は、例えば、ルート検索部16によって設定された出発地から目的地までのルート内において屈曲ポイントがあった場合に、それら屈曲ポイントの緯度及び経度を抽出する。屈曲ポイントは、交差点、湾曲した道等、ルートが所定角度以上屈曲するポイントである。例えば、屈曲ポイントは、一つのノードに接続した二つの道路リンクが形成する角度が、所定角度以上である場合のノードであってもよい。屈曲ポイントと判定する際の角度は、予め定められていてもよい。抽出された屈曲ポイントの位置データは、条件判定部15へ通知される。
【0047】
位置推定部18は、車両3の現在位置を推定する。この現在位置の推定は、例えば、車両3がトンネル内に存在する場合など、GPS受信機6がGPS信号を受信できず、GPSによる位置検出(GPS測位)ができない場合に行うようにしてもよい。
【0048】
位置推定部18は、車両位置の検出が不能であるとき、位置検出が不能になる以前の車両3の状態及びそれ以降のジャイロスコープ7の出力に基づいて現在位置を推定する。例えば、位置推定部18は、第1の時刻から所定時間以上連続して測位ができないとき、第1の時刻以前の車両の走行状態と第1の時刻以降のジャイロスコープ7の出力に基づいて現在位置を推定する。位置推定部18は、例えば、車両データ記憶部12から最新の時刻31の走行速度33を取得し、走行速度はそのままに保たれていると仮定する。一方、進行方向に関しては、ジャイロスコープ7が出力した変位角に従って変わったものと仮定する。位置推定部18は、これらの仮定に従って現在位置を推定する。以下、位置推定部18によって推定された現在位置を推定位置と呼ぶ。なお、この現在位置の推定は、第1の時刻以前の車両の走行速度が所定速度以上である場合に行うようにしてもよい。低速である場合には、その後大きく進行方向を変更したり、停止したりする可能性も高く、現在位置の推定を行っても現実の位置との誤差が大きくなるおそれがあるからである。
【0049】
表示制御部13は、この推定位置を地図画像上に表示してもよい。次に説明するマッチング処理部19によってリンクマッチングが行われたときは、対応付けられた道路リンク上に推定位置を表示してもよい。また、マッチング処理部19が推定位置のリンクマッチングを行うときに、推定位置と最寄りの道路(道路リンク)との距離が所定距離以上乖離しているときは、表示制御部13は推定位置に基づく表示を行わないようにしてもよい。推定位置が現実の位置と大きく乖離していると考えられるからである。なお、最寄りの道路は、ルート設定がされている場合は、そのルート内の道路であってもよい。
【0050】
図4は、推定位置と道路との乖離についての説明図である。同図では、車両位置P1まではGPSによる測位が行われていたが、車両位置P2以降でGPS信号を受信できなくなり、GPS測位ができなくなっている状態を示す。車両位置P2〜P5は、位置推定部18が車両位置P1以前の走行速度33と車両位置P1が検出された時刻以降のジャイロスコープ7が検出した変位角に基づいて推定された推定位置である。このとき、推定位置P2〜P5と道路との距離D2〜D5が所定距離以内であるときは、表示制御部13は、実測された車両位置32のときと同じ要領で、推定位置を現在位置として表示する。しかしながら、推定位置P2〜P5と道路との距離D2〜D5が所定以上の距離になると、表示制御部13は、推定位置を現在位置として表示することを行わないようにしてもよい。
【0051】
マッチング処理部19は、GPS信号に基づいて検出された現在位置を、所定のマッチングルールに従って、いずれかの道路リンクに対応付けるリンクマッチングを行う。マッチング処理部19は、例えば、車両データ記憶部12を参照し、現在の車両位置32に最も近い道路リンクに対応付けてもよい。また、マッチング処理部19は、直前のマッチング処理で対応付けた道路リンクと連続性を有する道路リンクに対応付けてもよい。また、後述する再マッチングを行うときは、ミスマッチと判定された道路リンクを除外して再度リンクマッチングを行う。マッチング処理部19は、リンクマッチングにより対応付けられた道路リンク上の地点であって、車両位置32と最も近い地点を補正位置として、その緯度及び経度を特定する。マッチング処理部19は、マッチング処理結果をマッチング記憶部23に記憶する。
【0052】
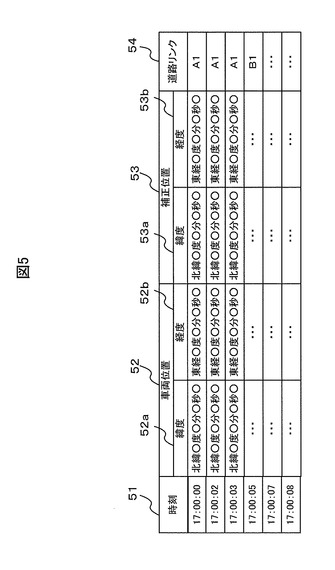
図5は、マッチング記憶部23に保存されるマッチングデータのデータ構造の一例を示す。マッチングデータは、時刻51と、その時刻の車両位置(緯度、経度)52と、車両位置52を補正した補正位置(緯度、経度)53と、対応づけられた道路リンク54とを有する。補正位置53は、道路リンク54上の地点であって、地図画像上に現在位置を表示する際に用いられる点である。
【0053】
マッチング処理部19は、ミスマッチ防止のために、一度マッチングした道路リンクが適当であるか否かを判定し、不適当であるときは再マッチングを行ってもよい。例えば、マッチング処理部19は、ビル街などでマルチパスの影響でGPS測位が大幅にずれたことによって、リンクマッチングによって対応付けられた道路リンクが不連続になっているときに、以下に説明する手順でこれを検出する。
【0054】
マッチング処理部19は、マッチング記憶部23を参照して、最新の時刻51Aの道路リンク(以下、最新リンクと称する)54Aと、その直前の時刻51Bの道路リンク(以下、直前リンクと称する)54Bとが、直進性を有しない不連続の関係であるか否かを判定する。
【0055】
ここで、第1の道路リンクと第2の道路リンクとの間に一つ以上の第3の道路リンクが入り、かつ、一つ以上の第3の道路リンクのいずれかが、第1の道路リンクと所定以上の角度を有する場合に、第1の道路リンクと第2の道路リンクは直進性を有しない不連続の関係であるとする。
【0056】
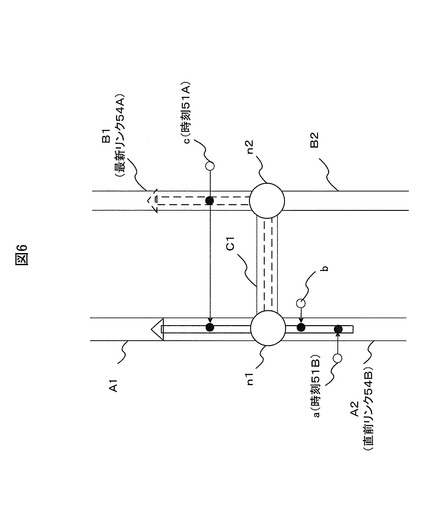
図6は、リンクマッチングの説明図である。同図の例では、道路リンクA2,A1と、道路リンクB2,B2とは、それぞれ直進性があり、かつ連続している。道路リンクA2,A1と、道路リンクB2,B2とは、互いにほぼ並行で不連続である。ここで、道路リンクA2とB1、及び道路リンクB2とA1とは、それぞれ直進性を有しない不連続の関係である。例えば、図6において、直前リンク54Bが道路リンクA2、最新リンク54Aが道路リンクB1であるとき、最新リンク54Aと、直前リンク54Bとは直進性を有しない不連続の関係である。
【0057】
最新リンク54Aと、直前リンク54Bとは直進性を有しない不連続の関係である場合、マッチング処理部19は、最新の時刻51Aと直前の時刻51Bとの間にジャイロスコープ7が検出した変位角に基づいて、直前リンク54Bのマッチングが適当であるか否かを判定する。例えば、最新リンク54Aと直前リンク54Bとが直進性を有しない不連続である場合、マッチング処理部19は、変位角データ記憶部20を参照して、最新の時刻51Aと直前の時刻51Bとの間に所定以上の大きさの変位角が検出されたか否かを判定する。最新リンク54Aと、直前リンク54Bとの位置関係から、変位角の向きを考慮に入れてもよい。
【0058】
例えば、図6の場合、道路リンクB1が最新リンク54A、道路リンクA2が直前リンク54Bというリンクマッチングが正しければ、道路リンクA2から道路リンクB1へ移動する間にノードn1、道路リンクC1及びノードn2を通過しているはずである。そこで、マッチング処理部19は、変位角データ記憶部20を参照して、最新の時刻51Aと直前の時刻51Aとの間に、右折を示す方向に所定角度以上の変位角が検出されたのち、左折を示す方向に所定角度以上の変位角が検出されているか否かを判定する。
【0059】
最新の時刻51Aと直前の時刻51Bとの間に上記のような変位角が検出されていないときは、マッチング処理部19は、直前リンク54Bのマッチングが適当でない、すなわち、ミスマッチであると判定する。そして、ミスマッチと判定された道路リンクを除外して、別の道路リンクにマッチするように再度マッチング処理を行う。
【0060】
また、マッチング処理部19が位置推定部18により推定された推定位置のリンクマッチングを行うときに、推定位置と最寄りの道路リンクとの距離が所定距離以上乖離しているときは、リンクマッチングを行わずに、表示制御部13へその旨を通知する。
【0061】
次に、本実施形態に係る地図表示装置1が行う処理手順について、フローチャートを参照して説明する。
【0062】
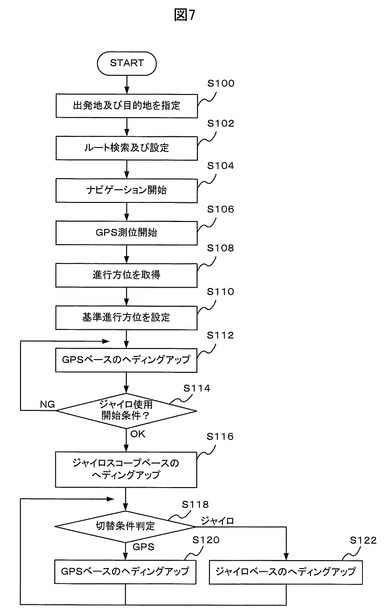
まず、目的地までのルートが設定され、ナビゲーションを行うときのヘディングアップ処理について、図7のフローチャートを用いて説明する。
【0063】
ナビゲーションを開始する際は、地図表示装置1がユーザからナビゲーションの出発地及び目的地の指定を受け付ける(S100)。この指定を受け付けると、ルート検索部16が出発地から目的地までのルート検索を行い、ルートを設定する(S102)。ルートが設定されると、ナビゲーションを開始するとともに(S104)、GPS信号による現在位置の検出(GPS測位)が開始される(S106)。ここで、GPS測位が行われている間、GPS測位によって得られた車両位置32に基づいて、演算処理部11による走行速度33及び進行方位34の算出が継続的に行われる。
【0064】
そこで、表示制御部13は、演算処理部11によって算出された進行方位34を取得して(S108)、これを基準進行方位に設定する(S110)。そして、表示制御部13は、GPSベースのヘディングアップを開始する(S112)。つまり、まず始めに表示制御部13は、基準進行方位がディスプレイ5の上方向へ向くように、地図画像の表示方向を調整する。
【0065】
その後、表示制御部13は、ジャイロ使用開始条件が満たされたか否かを判定する(S114)。ジャイロ使用開始条件が満たされるまでの間は、GPSベースのヘッディングアップが繰り返される(S112)。
【0066】
ジャイロ使用開始条件が満たされると(S114:OK)、表示制御部13は、ジャイロベースのヘディングアップを開始する(S116)。ここまでの処理で、ナビゲーションの開始時処理が終了し、定常処理へ移行する。
【0067】
定常処理においては、条件判定部15は、条件記憶部14に保存されている切替条件の判定を行う(S118)。この切替条件は、例えば、既に述べたように所定速度以上であるか否か、高速道路上であるか否か、あるいは、屈曲ポイントでないか否かなどでよい。
【0068】
表示制御部13は、この切替条件が満たされるときは、GPSベースのヘディングアップを行い(S120)、この切替条件が満たされないときは、ジャイロベースのヘディングアップを行う(S122)。
【0069】
これにより、本実施形態の地図表示装置1は、GPSベースのヘディングアップとジャイロベースのヘディングアップとを適切に使い分けることができる。
【0070】
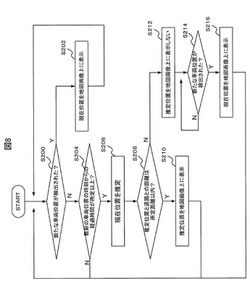
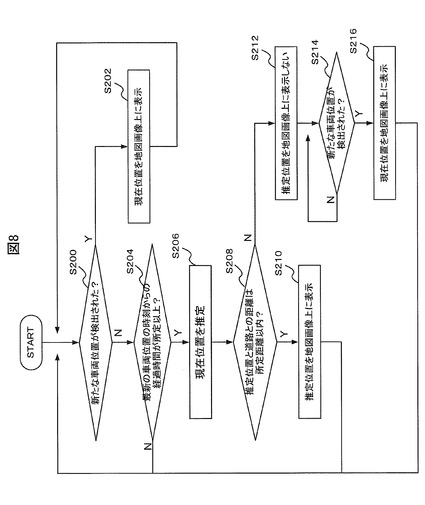
次に、GPS測位ができないときの現在位置の推定処理を行う場合を含めて、現在位置を地図画像上に表示する処理について、図8のフローチャートを用いて説明する。
【0071】
まず、表示制御部13が車両データ記憶部12を参照して、まだディスプレイ5に表示していない新たな車両位置32が検出されたか否かを判定する(S200)。新たな車両位置32が検出されたときは(S200:Yes)、表示制御部13がその車両位置32に基づいてディスプレイ5に現在位置を表示する(S202)。
【0072】
新たな車両位置32が検出されていないときは(S200:No)、最新の車両位置32が検出された時刻31からの経過時間が所定時間以上であるか否かを判定する(S204)。これは、所定時間以上、GPS測位ができていない状態であるか否かを判定している。
【0073】
最新の車両位置32が検出された時刻31からの経過時間が所定時間以上でないときは(S204:No)、ステップS200へ戻る。一方、最新の車両位置32が検出された時刻31からの経過時間が所定時間以上であるときは(S204:Yes)、位置推定部18が現在位置を推定する(S206)。
【0074】
そして、マッチング処理部19が推定された現在位置(推定位置)をリンクマッチングする過程において、推定位置と最寄りの道路(道路リンク)との距離が所定距離以内であるか否かを判定する(S208)。この距離が所定距離以内であるときは(S208:Yes)、表示制御部13がリンクマッチングによって補正された補正位置53に基づいて、ディスプレイ5上に現在位置を表示して、ステップS200へ戻る(S210)。
【0075】
一方、マップマッチングの仮定で、推定位置と最寄りの道路との距離が所定距離以内でないと判定されたときは(S208:No)、マップマッチングの処理を中止するとともに、表示制御部13は推定位置に基づく現在位置の表示を行わない。そして、表示制御部13は、それ以降、改めてGPS測位による新たな車両位置32が検出されるのを待つ(S214、S216)。つまり、再びGPS測位が可能になり、新たな車両位置32が検出されるまでは、ディスプレイ5には現在位置の表示が行われない。
【0076】
これにより、GPS測位が途切れた場合でも、推定位置が妥当であると考えられる範囲内であるときに限り、推定位置に基づく現在位置を地図画像上に表示させることができる。
【0077】
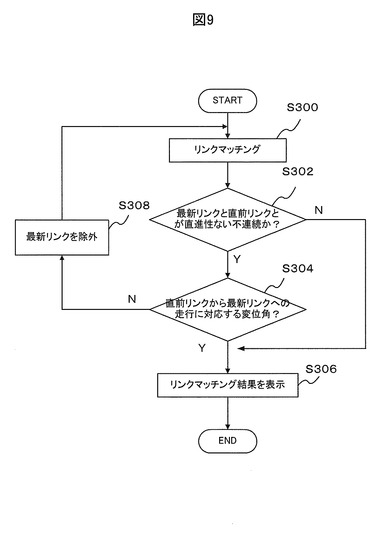
次に、リンクマッチングによって、直進性のない不連続な道路リンクにマッチングされたミスマッチを検出して修正する処理手順を、図9のフローチャートを参照して説明する。
【0078】
マッチング処理部19は、時刻31の車両位置32のリンクマッチングを行う(S300)。そして、マッチング処理部19は、そのときの時刻51及び車両位置52とともに、リンクマッチングの結果である補正位置53及び対応付けられた道路リンク54をマッチング記憶部23に記憶する。
【0079】
マッチング処理部19は、マッチング記憶部23を参照し、最新の時刻51Aの道路リンク(最新リンク)54Aと、最新の時刻より1つ前の直前の時刻51Bの道路リンク(直前リンク)54Bとが、直進性を有しない不連続の関係であるか否かを判定する(ステップS302)。
【0080】
最新リンク54Aと直前リンク54Bとが直進性を有しない不連続の関係ではないと判定された場合には(S302:No)、ステップS306へスキップする。
【0081】
一方、最新リンク54Aと直前リンク54Bとが、直進性を有しない不連続の関係であると判定された場合には(S302:Yes)、マッチング処理部19が変位角データ記憶部20を参照して、最新の時刻51Aと直前の時刻51Bとの間の変位角を判定する(S304)。すなわち、最新リンク54Aと直前リンク54Bとが直進性を有しない不連続な位置であるので、その道路リンク間を移動した場合に存在するはずである変位角の変化が、変位角データ記憶部20に記録されているか否かを判定する。
【0082】
ここで、最新の時刻51Aと直前の時刻51Bとの間に、直前リンク54Bから最新リンク51Aへ移動したことに対応する変位角が検出されていた場合(S304:Yes)、最新リンク54Aに対するリンクマッチングは正しいと判断され、表示制御部13が、リンクマッチングの結果に従って、ディスプレイ5上に地図画像を表示する(S306)。
【0083】
一方、最新の時刻51Aと直前の時刻51Bとの間に、直前リンク54Bから最新リンク51Aへ移動したことに対応する変位角が検出されていない場合は(S304:No)、マッチング処理部19は、最新リンク51Aを除外して再マッチングを行う(S308,S300)。つまり、ステップS300へ戻り、マッチング処理部19が最新リンク51A以外の道路リンクにマッチングされるようにして再マッチングを行う。
【0084】
これにより、ビル街などで生じることが多いGPS測位のズレに起因するミスマッチを防ぎ、リンクマッチングの精度を向上させることができる。
【0085】
上述した本発明の実施形態は、本発明の説明のための例示であり、本発明の範囲をそれらの実施形態にのみ限定する趣旨ではない。当業者は、本発明の要旨を逸脱することなしに、他の様々な態様で本発明を実施することができる。
【符号の説明】
【0086】
1 地図表示装置
3 車両
4 地図データ処理部
6 GPS受信機
7 ジャイロスコープ
10 地図データ取得部
11 演算処理部
12 車両データ記憶部
13 表示制御部
14 条件記憶部
15 条件判定部
16 ルート検索部
17 抽出部
18 位置推定部
19 マッチング処理部
20 変位角データ記憶部
23 マッチング記憶部
【技術分野】
【0001】
本発明は、情報処理装置、特に汎用性のある可搬型情報処理装置で実行される地図データを処理するためのコンピュータプログラム、方法及び地図表示装置に関する。
【背景技術】
【0002】
従来、地図表示装置として、例えば、カーナビゲーション装置やPND(Personal/Portable
Navigation Device)等が知られている。
【0003】
車載用のカーナビゲーション専用装置では、GPS(Global
Positioning System)等によって検出した現在位置を用いるだけでなく、ジャイロスコープが検出した車両の回転角、及び車両から取得した速度情報も活用して、車両の現在の状態を判定している。その結果、高精度で車両の状態を判定することができ、車両の現在位置を道路リンクに対応付けるリンクマッチング、及び車両の進行方向が上になるように地図を表示させるヘディングアップなどの表示も高精度で行うことができる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、近年では、携帯電話機に代表される可搬型情報処理装置であっても、地図データを処理するためのコンピュータプログラムを実行できるものがある。これらの情報処理装置は、GPSなどによる位置検出機能に加えて、ジャイロスコープを搭載するものまで登場している。
【0005】
そこで、本発明の目的は、ジャイロスコープを搭載した可搬型情報処理装置を用いて、表示精度の高い地図表示装置を実現するための技術を提供することである。
【0006】
本発明の別の目的は、GPS機能及びジャイロスコープを搭載した可搬型情報処理装置を用いた地図表示装置において、GPSで現在位置が測位できないときに好適な表示を行うことである。
【課題を解決するための手段】
【0007】
本発明の一つの実施態様に従う地図画像表示装置が地図データを処理するためのコンピュータプログラムは、地図画像を表示するための地図データを記憶した地図記憶部と、前記地図データに基づく地図画像を表示する表示部と、移動体の向きの変位角を検出するジャイロスコープと、GPS信号を受信するGPS受信機と、を備えた地図画像表示装置に実行させると、前記GPS受信機が受信したGPS信号に基づいて、前記移動体の現在位置を検出する位置検出ステップと、前記GPS信号に基づいた位置検出ができないとき、位置検出が不能になる以前の前記移動体の状態及び位置検出が不能になった以降のジャイロスコープの出力に基づいて、前記移動体の現在位置を推定する位置推定ステップと、前記位置検出ステップによって検出された現在位置または前記位置推定ステップによって推定された現在位置に応じて、前記表示部の地図画像上に現在位置を表示させる表示ステップであって、前記推定された現在位置と道路との乖離が所定距離以上であれば、前記推定された現在位置に応じた現在位置の表示を行わない、前記表示ステップと、が行われる。
【0008】
好適な実施形態では、前記位置推定ステップは、前記GPS信号に基づいた移動体の位置検出が不能となった第1の時刻以前の前記移動体の走行速度、及び前記第1の時刻以降のジャイロスコープ7の出力に基づいて現在位置を推定するようにしてもよい。
【0009】
好適な実施形態では、前記位置推定ステップは、前記第1の時刻以前の前記移動体の走行速度が所定速度以上であるときに現在位置の推定を行うようにしてもよい。
【図面の簡単な説明】
【0010】
【図1】本発明の一実施形態に係るコンピュータプログラムがインストールされた地図表示装置の利用形態の説明図である。
【図2】地図表示装置1の構成図である。
【図3】車両データ記憶部12のデータ構造の一例を示す図である。
【図4】推定された現在位置と道路との乖離についての説明図である。
【図5】マッチング記憶部23のデータ構造の一例を示す図である。
【図6】リンクマッチングの説明図である。
【図7】ナビゲーションを行うときのヘディングアップ処理の手順を示すフローチャートである。
【図8】GPS測位ができないときの現在位置の推定処理を行う場合を含む、現在位置を地図画像上に表示する処理の手順を示すフローチャートである。
【図9】リンクマッチングによって、直進性のない不連続な道路リンクにマッチングされたミスマッチを検出して修正する処理手順を示すフローチャートである。
【発明を実施するための形態】
【0011】
以下、本発明の好適な実施形態に係る地図表示装置について説明する。本実施形態に係る地図表示装置1は、携帯電話機などの可搬型情報処理装置に、所定のコンピュータプログラムを実行させることにより実現される。以下に説明する実施形態では、携帯電話機にカーナビゲーション用のプログラムが実行された場合を例にとって説明するが、実行されるプログラムは、例えば歩行者用のナビゲーションプログラム等でもよいし、単に現在位置を含む地図を表示するプログラムであってもよい。
【0012】
図1は、本実施形態に係る地図表示装置1の利用形態の一例を示す図である。本実施形態に係る地図表示装置1は、例えば、車両3などの移動体に搭載して使用することができる。地図表示装置1は、現在位置を検出する手段として、GPS衛星2からのGPS信号を受信するGPS受信機を備えてもよい。地図表示装置1を車両3に搭載して使用するときは、例えば、地図表示装置1を車両3のインストルメントパネル上のフォルダに着脱自在に固定してもよいし、ユーザ(例えば助手席の人)が手で持っていてもよい。
【0013】
図2は、地図表示装置1の構成図である。
【0014】
地図表示装置1は、地図データ処理部4、ディスプレイ5、GPS受信機6、ジャイロスコープ7、入力部8及び地図情報データベース(以下、地図情報DBという)9を備える。地図データ処理部4は、携帯電話機の図示しないプロセッサ及びメモリを用いて所定のプログラムを実行することにより実現される。
【0015】
GPS受信機6は、複数のGPS衛星2からGPS信号を受信する。GPS受信機6は、受信したGPS信号を地図データ処理部4の演算処理部11へ通知する。
【0016】
ジャイロスコープ7は車両3の進行方向の変位角を検出して出力する。例えば、ジャイロスコープ7は、所定の時間間隔でその間に変位した変位角を出力する。変位角は、例えば、zyzオイラー角で表現されていてもよい。本実施形態では、ナビゲーションに利用するため、鉛直方向と垂直な2次元平面内での変位角を用いることとする。ジャイロスコープ7が検出した変位角は、変位角データ記憶部20に検出された時刻とともに保存される。
【0017】
ディスプレイ5は、例えば液晶ディスプレイなどでよい。ディスプレイ5及び入力部8は、外見上一体となったタッチパネル式の入出力装置であってもよい。ディスプレイ5には、後述する表示制御部13の制御に従って、地図画像、地図表示装置1の現在位置及びナビゲーションのためのルート等が表示される。
【0018】
入力部8は、例えば、ポインティングデバイス、入力キー、タッチセンサなどでよい。ユーザは、入力部8を操作して出発地及び目的地を入力する。入力部8から入力された情報は、後述する地図データ処理部4のルート検索部16へ送信される。
【0019】
地図情報DB9には、地図データが記憶されている。地図データには、ディスプレイ5上に地図画像を表示するための地図画像データと、道路を道路リンク及びノードで表したリンクデータが含まれる。地図情報DB9には、例えば、ネットワークを通じて取得された地図データが一時的に記憶されてもよいし、また例えば、日本道路地図のように所定地域の地図データが常に格納されていてもよい。
【0020】
地図データ処理部4は、地図データ取得部10、演算処理部11、車両データ記憶部12、表示制御部13、条件記憶部14と、条件判定部15と、ルート検索部16と、抽出部17と、位置推定部18と、マッチング処理部19と、変位角データ記憶部20と、マッチング記憶部23とを備える。地図データ処理部4内の各構成要素を以下に説明する。
【0021】
地図データ取得部10は、現在位置周辺の地図データを地図情報DB9から取得する。地図データ取得部10は、現在位置周辺の地図データを地図情報DB9から取得するため、最新の時刻31の車両位置32(図3参照)を車両データ記憶部12から取得し、この車両位置32を現在位置としてもよい。この場合、例えば、地図データ取得部10は現在位置を中心とし、ディスプレイ5に表示される範囲の地図データを取得してもよい。また、地図データ取得部10は、既にディスプレイ5に表示されている地図画像を更新するときは、表示されている地図画像との差分データのみを取得するようにしてもよい。
【0022】
車両データ記憶部12は、車両3の移動に関する車両データを記憶する。図3は、車両データ記憶部12のデータ構造の一例を示す。車両データには、例えば、時刻31と、それぞれの時刻における車両位置32と、走行速度33と、進行方位34とを含む。車両位置32は、緯度32a及び経度32bにより特定される。車両位置32、走行速度33、及び進行方位34は、以下に説明する演算処理部11により算出される。
【0023】
演算処理部11は、複数の異なる時刻において、各時刻における地図表示装置1の現在位置を検出する。例えば、演算処理部11は、GPS受信機6から通知されたGPS信号から、地図表示装置1の位置を検出してもよい。この位置は、例えば、GPS信号から算出された地図表示装置1のその時点での緯度32a及び経度32bを含む。なお、本実施形態では、地図表示装置1が車両3に搭載されている場合を扱うので、地図表示装置1の位置を車両位置として扱う。
【0024】
演算処理部11はまた、各時刻における地図表示装置1の位置を示す車両位置32を車両データ記憶部12に保存する。例えば、演算処理部11は、検出した車両位置32をそのときの時刻31に対応付けて車両データ記憶部12に記憶する。
【0025】
演算処理部11は、車両データ記憶部12に記憶されている車両位置32に基づいて、地図表示装置1を搭載している車両3の走行速度33を算出する。演算処理部11は、車両データ記憶部12を参照し、異なる時刻31及び各時刻31での車両位置32から、地図表示装置1の走行速度33を算出してもよい。例えば、演算処理部11は、ある時刻の車両位置32及びその時刻31と、それ以前に検出された一つ以上の車両位置32及びその時刻31とに基づいて走行速度33を算出する。演算処理部11は、算出した走行速度33を車両データ記憶部12に記憶してもよい。例えば、図3の例では、演算処理部11は、時刻31が「17:00:00」のときの車両位置32と、検出時刻31が「17:00:02」のときの車両位置32とからこの間の走行速度33を算出し、算出された走行速度33「30km/h」を、時刻31が「17:00:02」のときの走行速度33として記憶している。
【0026】
演算処理部11は、車両データ記憶部12に記憶されている車両位置32に基づいて、地図表示装置1が進行している進行方位を検出する。演算処理部11は、車両データ記憶部12を参照し、異なる時刻の車両位置32から、地図表示装置1の進行した方位を算出してもよい。例えば、演算処理部11は、ある時刻の車両位置32及びそれ以前に検出された一つ以上の車両位置32に基づいて進行方位34を算出する。進行方位34は、例えば北を基準(0度)として全方位360度で算出してもよい。演算処理部11は、算出した地図表示装置1の進行方位34を車両データ記憶部12に記憶してもよい。例えば、図3の例では、演算処理部11は、検出時刻31が「17:00:00」のときの車両位置32と、検出時刻31が「17:00:02」のときの車両位置32とから進行方位34を算出し、算出された第2方位「180°」を、時刻31が「17:00:02」のときの進行方位34として記憶している。
【0027】
変位角データ記憶部20には、ジャイロスコープ7が検出した変位角が、その検出時刻とともに記憶される。
【0028】
表示制御部13は、地図データ取得部10から受信した地図データに基づき、ディスプレイ5に地図画像を表示する。さらに、表示制御部13は、車両データ記憶部12から最新の時刻31における車両位置32を取得し、その車両位置32を地図表示装置1の現在位置として、地図画像に重ねて表示する。
【0029】
表示制御部13は、車両の進行方位34及び/またはジャイロスコープ7が検出した変位角に応じて、地図データに基づく地図画像をディスプレイ5に表示させる。例えば、表示制御部13は、車両3がその時点で進行している方位が所定の基準方向へ向くように、地図画像の表示方向を変更してディスプレイ5に表示させてもよい。この基準方向がディスプレイ5の上方向であるとき、いわゆるヘッディングアップ表示となる。
【0030】
車両3の進行方向は、例えば、ある基準時刻での進行方位34を基準進行方位とし、その基準進行方位に基準時刻以降にジャイロスコープ7が出力した変位角を加算して定めてもよい。基準進行方位は、後述するルート検索部16がルートを設定した後、その設定されたルートに従うナビゲーションの開始時の進行方位34であってもよい。ジャイロスコープ7では、絶対的な方位を知ることができないので、GPS測位によって得られる進行方位34で基準方位を定めてから、ジャイロスコープ7の出力を活用する。
【0031】
表示制御部13は、ナビゲーション開始時に、ジャイロスコープ7の出力を使用せず、GPS測位の結果得られた進行方位34に基づいてヘディングアップ(以下、「GPSベースのヘディングアップアップ」と称する)を行う。そして、所定のジャイロ使用開始条件を満たした後、表示制御部13は、基準進行方位とジャイロスコープ7の変位角を用いたヘディングアップアップ(以下、「ジャイロベースのヘディングアップアップ」と称する)へ切り替える。ここで、ジャイロ使用開始条件とは、例えば、GPSによって測位された車両位置32の数、走行速度33、ナビゲーション開始からの経過時間などが所定の基準値に達しているか否かとしてもよい。例えば、ナビゲーション開始時から一定時間が経過するまで、走行速度33が所定速度(例えば15km/h)に達するまで、または、車両位置32の数が所定数に達するまでは、GPSベースのヘディングアップアップを行い、それ以降はジャイロベースのヘディングアップアップを行うようにしてもよい。
【0032】
なお、ここでは、ナビゲーション開始時に基準進行方位を設定するとしているが、これは、携帯電話機で地図表示装置1のためのアプリケーションが開始された後、ナビゲーションを開始する以前の任意のタイミングに行ってもよい。例えば、ルートを設定していなくても、GPS測位を行っていれば(例えばフリーナビの動作開始時)、そのときに行ってもよい。
【0033】
表示制御部13は、ヘディングアップの切替条件に従って、GPSベースのヘディングアップを行うか、または、ジャイロベースのヘディングアップアップを行うかの切替を行ってもよい。このヘディングアップの切替条件は、条件記憶部14に記憶され、それを満たすか否かが条件判定部15によって判定される。
【0034】
例えば、ナビゲーション開始後、一旦ジャイロベースのヘディングアップアップに切り替わった後は、所定速度(例えば40km/h)を境にして、走行速度33がその速度以上のときはGPSベースのへディングアップアップ、その速度未満のときはジャイロベースのへディングアップアップを行うようにしてもよい。これにより、主に低速時にジャイロベースのヘディングアップを適用することができる。車両3の方向が大きく変わるのは一般に低速時であるから、そのときにジャイロスコープ7の出力に基づくヘディングアップを行うことで、地図表示を現実の車両3の動きによく追従させることができる。
【0035】
さらには、このGPSベースのヘッディングアップとジャイロベースのヘディングアップとの切替を行う閾値となる速度は可変であってもよい。例えば、渋滞している道路にいる場合には、渋滞していない道路にいる場合よりも閾値となる速度を低くしてもよい。道路が渋滞しているか否かの判定は、例えば、外部システムから取得する渋滞情報に基づいて行ってもよいし、一定時間以上、渋滞判定の閾値となる速度以下であるときに渋滞していると判定してもよい。
【0036】
条件記憶部14には、ヘディングアップの表示方法の切替を行うための切替条件が記憶される。切替条件は、例えば、条件判定部15が判定する条件である。切替条件は、走行速度に基づいた条件や進行方向の変化に基づく条件であってもよい。例えば、切替条件は、「走行速度が閾値以上である」、「現在位置が高速道路上である」、「現在位置が屈曲ポイント周辺ではない」等のように、GPSベースの表示切替を実行する条件を設定してもよい。条件記憶部14に記憶される条件は予め登録しておいてもよいし、使用の都度登録してもよい。また、登録してある条件の中から、ユーザが使用の際に適宜選択してもよい。
【0037】
条件判定部15は、切替条件が満たされたか否かの判定を行う。例えば、条件判定部15は、条件記憶部14に複数の切替条件が記憶されているときは、それぞれの切替条件が満たされているか否かの判定を行う。このとき、条件判定部15は、切替条件の判定のために必要なデータ等を取得してもよい。条件判定部15は、判定結果を表示制御部13に通知する。
【0038】
例えば、「走行速度が閾値以上である」という切替条件の判定を行う場合には、条件判定部15は、車両データ記憶部12を参照し、現在(最新の時刻31)の走行速度33を取得する。そして、条件判定部15は、現在の走行速度33が、閾値として設定されている速度以上であるか否かを判定する。
【0039】
また、「現在位置が高速道路上である」という切替条件の判定を行う場合には、条件判定部15は、車両データ記憶部12を参照して、現在(最新の時刻31)の車両位置32を取得する。そして、地図DBを参照して、この車両位置32が高速道路上であるか否かを判定する。
【0040】
さらには、「現在位置が屈曲ポイント周辺でない」という切替条件の判定を行う場合には、条件判定部15は、車両データ記憶部12を参照し、現在(最新の時刻31)の車両位置32を取得する。そして、条件判定部15は、現在の車両位置32が抽出部17によって抽出された屈曲ポイントから所定距離以内であるか否かを判定する。抽出部17による屈曲ポイント抽出処理については後述する。
【0041】
条件判定部15によって切替条件が満たされていると判定された場合には、表示制御部13は、ジャイロスコープ7の出力を用いずに、進行方位34に基づいて地図画像をディスプレイ5に表示させる。例えば、表示制御部13は、GPSベースのヘディングアップを行う。
【0042】
一方で、条件判定部15によって切替条件が満たされていないと判定された場合には、表示制御部13は、ジャイロスコープ7の出力に基づいて、ディスプレイ5に表示させる地図画像の表示方向を定める。例えば、表示制御部13は、ジャイロベースのヘディングアップを行う。
【0043】
複数の切替条件があるとき、表示制御部13は、すべての切替条件が満たされていない状態から一つの切替条件が満たされたときに上述のような表示に変更してもよいし、すべての切替条件が満たされたときに変更してもよい。また、表示制御部13は、すべての切替条件が満たされている状態から一つの条件が満たされなくなったときに、上述のように表示を変更してもよいし、すべての条件が満たされなくなったときに変更してもよい。
【0044】
ルート検索部16は、出発地及び目的地が指定されると、出発地から目的地までのルートを検索を行って、ルートを設定する。出発地は、例えば現在位置であってもよいし、また例えばユーザ設定したスタート地点であってもよい。ルート検索部16は、検索したルートを表示制御部13及び抽出部17へ通知する。
【0045】
表示制御部13は、ルート検索部16が設定したルートの通知を受けたときは、通知のあったルートを、ディスプレイ5上の地図画像に反映する。
【0046】
抽出部17は、ルート検索部16が検索したルート内に、交差点などで所定角度以上曲がる屈曲ポイントを検索し、その地点の位置データを抽出する。抽出部17は、例えば、ルート検索部16によって設定された出発地から目的地までのルート内において屈曲ポイントがあった場合に、それら屈曲ポイントの緯度及び経度を抽出する。屈曲ポイントは、交差点、湾曲した道等、ルートが所定角度以上屈曲するポイントである。例えば、屈曲ポイントは、一つのノードに接続した二つの道路リンクが形成する角度が、所定角度以上である場合のノードであってもよい。屈曲ポイントと判定する際の角度は、予め定められていてもよい。抽出された屈曲ポイントの位置データは、条件判定部15へ通知される。
【0047】
位置推定部18は、車両3の現在位置を推定する。この現在位置の推定は、例えば、車両3がトンネル内に存在する場合など、GPS受信機6がGPS信号を受信できず、GPSによる位置検出(GPS測位)ができない場合に行うようにしてもよい。
【0048】
位置推定部18は、車両位置の検出が不能であるとき、位置検出が不能になる以前の車両3の状態及びそれ以降のジャイロスコープ7の出力に基づいて現在位置を推定する。例えば、位置推定部18は、第1の時刻から所定時間以上連続して測位ができないとき、第1の時刻以前の車両の走行状態と第1の時刻以降のジャイロスコープ7の出力に基づいて現在位置を推定する。位置推定部18は、例えば、車両データ記憶部12から最新の時刻31の走行速度33を取得し、走行速度はそのままに保たれていると仮定する。一方、進行方向に関しては、ジャイロスコープ7が出力した変位角に従って変わったものと仮定する。位置推定部18は、これらの仮定に従って現在位置を推定する。以下、位置推定部18によって推定された現在位置を推定位置と呼ぶ。なお、この現在位置の推定は、第1の時刻以前の車両の走行速度が所定速度以上である場合に行うようにしてもよい。低速である場合には、その後大きく進行方向を変更したり、停止したりする可能性も高く、現在位置の推定を行っても現実の位置との誤差が大きくなるおそれがあるからである。
【0049】
表示制御部13は、この推定位置を地図画像上に表示してもよい。次に説明するマッチング処理部19によってリンクマッチングが行われたときは、対応付けられた道路リンク上に推定位置を表示してもよい。また、マッチング処理部19が推定位置のリンクマッチングを行うときに、推定位置と最寄りの道路(道路リンク)との距離が所定距離以上乖離しているときは、表示制御部13は推定位置に基づく表示を行わないようにしてもよい。推定位置が現実の位置と大きく乖離していると考えられるからである。なお、最寄りの道路は、ルート設定がされている場合は、そのルート内の道路であってもよい。
【0050】
図4は、推定位置と道路との乖離についての説明図である。同図では、車両位置P1まではGPSによる測位が行われていたが、車両位置P2以降でGPS信号を受信できなくなり、GPS測位ができなくなっている状態を示す。車両位置P2〜P5は、位置推定部18が車両位置P1以前の走行速度33と車両位置P1が検出された時刻以降のジャイロスコープ7が検出した変位角に基づいて推定された推定位置である。このとき、推定位置P2〜P5と道路との距離D2〜D5が所定距離以内であるときは、表示制御部13は、実測された車両位置32のときと同じ要領で、推定位置を現在位置として表示する。しかしながら、推定位置P2〜P5と道路との距離D2〜D5が所定以上の距離になると、表示制御部13は、推定位置を現在位置として表示することを行わないようにしてもよい。
【0051】
マッチング処理部19は、GPS信号に基づいて検出された現在位置を、所定のマッチングルールに従って、いずれかの道路リンクに対応付けるリンクマッチングを行う。マッチング処理部19は、例えば、車両データ記憶部12を参照し、現在の車両位置32に最も近い道路リンクに対応付けてもよい。また、マッチング処理部19は、直前のマッチング処理で対応付けた道路リンクと連続性を有する道路リンクに対応付けてもよい。また、後述する再マッチングを行うときは、ミスマッチと判定された道路リンクを除外して再度リンクマッチングを行う。マッチング処理部19は、リンクマッチングにより対応付けられた道路リンク上の地点であって、車両位置32と最も近い地点を補正位置として、その緯度及び経度を特定する。マッチング処理部19は、マッチング処理結果をマッチング記憶部23に記憶する。
【0052】
図5は、マッチング記憶部23に保存されるマッチングデータのデータ構造の一例を示す。マッチングデータは、時刻51と、その時刻の車両位置(緯度、経度)52と、車両位置52を補正した補正位置(緯度、経度)53と、対応づけられた道路リンク54とを有する。補正位置53は、道路リンク54上の地点であって、地図画像上に現在位置を表示する際に用いられる点である。
【0053】
マッチング処理部19は、ミスマッチ防止のために、一度マッチングした道路リンクが適当であるか否かを判定し、不適当であるときは再マッチングを行ってもよい。例えば、マッチング処理部19は、ビル街などでマルチパスの影響でGPS測位が大幅にずれたことによって、リンクマッチングによって対応付けられた道路リンクが不連続になっているときに、以下に説明する手順でこれを検出する。
【0054】
マッチング処理部19は、マッチング記憶部23を参照して、最新の時刻51Aの道路リンク(以下、最新リンクと称する)54Aと、その直前の時刻51Bの道路リンク(以下、直前リンクと称する)54Bとが、直進性を有しない不連続の関係であるか否かを判定する。
【0055】
ここで、第1の道路リンクと第2の道路リンクとの間に一つ以上の第3の道路リンクが入り、かつ、一つ以上の第3の道路リンクのいずれかが、第1の道路リンクと所定以上の角度を有する場合に、第1の道路リンクと第2の道路リンクは直進性を有しない不連続の関係であるとする。
【0056】
図6は、リンクマッチングの説明図である。同図の例では、道路リンクA2,A1と、道路リンクB2,B2とは、それぞれ直進性があり、かつ連続している。道路リンクA2,A1と、道路リンクB2,B2とは、互いにほぼ並行で不連続である。ここで、道路リンクA2とB1、及び道路リンクB2とA1とは、それぞれ直進性を有しない不連続の関係である。例えば、図6において、直前リンク54Bが道路リンクA2、最新リンク54Aが道路リンクB1であるとき、最新リンク54Aと、直前リンク54Bとは直進性を有しない不連続の関係である。
【0057】
最新リンク54Aと、直前リンク54Bとは直進性を有しない不連続の関係である場合、マッチング処理部19は、最新の時刻51Aと直前の時刻51Bとの間にジャイロスコープ7が検出した変位角に基づいて、直前リンク54Bのマッチングが適当であるか否かを判定する。例えば、最新リンク54Aと直前リンク54Bとが直進性を有しない不連続である場合、マッチング処理部19は、変位角データ記憶部20を参照して、最新の時刻51Aと直前の時刻51Bとの間に所定以上の大きさの変位角が検出されたか否かを判定する。最新リンク54Aと、直前リンク54Bとの位置関係から、変位角の向きを考慮に入れてもよい。
【0058】
例えば、図6の場合、道路リンクB1が最新リンク54A、道路リンクA2が直前リンク54Bというリンクマッチングが正しければ、道路リンクA2から道路リンクB1へ移動する間にノードn1、道路リンクC1及びノードn2を通過しているはずである。そこで、マッチング処理部19は、変位角データ記憶部20を参照して、最新の時刻51Aと直前の時刻51Aとの間に、右折を示す方向に所定角度以上の変位角が検出されたのち、左折を示す方向に所定角度以上の変位角が検出されているか否かを判定する。
【0059】
最新の時刻51Aと直前の時刻51Bとの間に上記のような変位角が検出されていないときは、マッチング処理部19は、直前リンク54Bのマッチングが適当でない、すなわち、ミスマッチであると判定する。そして、ミスマッチと判定された道路リンクを除外して、別の道路リンクにマッチするように再度マッチング処理を行う。
【0060】
また、マッチング処理部19が位置推定部18により推定された推定位置のリンクマッチングを行うときに、推定位置と最寄りの道路リンクとの距離が所定距離以上乖離しているときは、リンクマッチングを行わずに、表示制御部13へその旨を通知する。
【0061】
次に、本実施形態に係る地図表示装置1が行う処理手順について、フローチャートを参照して説明する。
【0062】
まず、目的地までのルートが設定され、ナビゲーションを行うときのヘディングアップ処理について、図7のフローチャートを用いて説明する。
【0063】
ナビゲーションを開始する際は、地図表示装置1がユーザからナビゲーションの出発地及び目的地の指定を受け付ける(S100)。この指定を受け付けると、ルート検索部16が出発地から目的地までのルート検索を行い、ルートを設定する(S102)。ルートが設定されると、ナビゲーションを開始するとともに(S104)、GPS信号による現在位置の検出(GPS測位)が開始される(S106)。ここで、GPS測位が行われている間、GPS測位によって得られた車両位置32に基づいて、演算処理部11による走行速度33及び進行方位34の算出が継続的に行われる。
【0064】
そこで、表示制御部13は、演算処理部11によって算出された進行方位34を取得して(S108)、これを基準進行方位に設定する(S110)。そして、表示制御部13は、GPSベースのヘディングアップを開始する(S112)。つまり、まず始めに表示制御部13は、基準進行方位がディスプレイ5の上方向へ向くように、地図画像の表示方向を調整する。
【0065】
その後、表示制御部13は、ジャイロ使用開始条件が満たされたか否かを判定する(S114)。ジャイロ使用開始条件が満たされるまでの間は、GPSベースのヘッディングアップが繰り返される(S112)。
【0066】
ジャイロ使用開始条件が満たされると(S114:OK)、表示制御部13は、ジャイロベースのヘディングアップを開始する(S116)。ここまでの処理で、ナビゲーションの開始時処理が終了し、定常処理へ移行する。
【0067】
定常処理においては、条件判定部15は、条件記憶部14に保存されている切替条件の判定を行う(S118)。この切替条件は、例えば、既に述べたように所定速度以上であるか否か、高速道路上であるか否か、あるいは、屈曲ポイントでないか否かなどでよい。
【0068】
表示制御部13は、この切替条件が満たされるときは、GPSベースのヘディングアップを行い(S120)、この切替条件が満たされないときは、ジャイロベースのヘディングアップを行う(S122)。
【0069】
これにより、本実施形態の地図表示装置1は、GPSベースのヘディングアップとジャイロベースのヘディングアップとを適切に使い分けることができる。
【0070】
次に、GPS測位ができないときの現在位置の推定処理を行う場合を含めて、現在位置を地図画像上に表示する処理について、図8のフローチャートを用いて説明する。
【0071】
まず、表示制御部13が車両データ記憶部12を参照して、まだディスプレイ5に表示していない新たな車両位置32が検出されたか否かを判定する(S200)。新たな車両位置32が検出されたときは(S200:Yes)、表示制御部13がその車両位置32に基づいてディスプレイ5に現在位置を表示する(S202)。
【0072】
新たな車両位置32が検出されていないときは(S200:No)、最新の車両位置32が検出された時刻31からの経過時間が所定時間以上であるか否かを判定する(S204)。これは、所定時間以上、GPS測位ができていない状態であるか否かを判定している。
【0073】
最新の車両位置32が検出された時刻31からの経過時間が所定時間以上でないときは(S204:No)、ステップS200へ戻る。一方、最新の車両位置32が検出された時刻31からの経過時間が所定時間以上であるときは(S204:Yes)、位置推定部18が現在位置を推定する(S206)。
【0074】
そして、マッチング処理部19が推定された現在位置(推定位置)をリンクマッチングする過程において、推定位置と最寄りの道路(道路リンク)との距離が所定距離以内であるか否かを判定する(S208)。この距離が所定距離以内であるときは(S208:Yes)、表示制御部13がリンクマッチングによって補正された補正位置53に基づいて、ディスプレイ5上に現在位置を表示して、ステップS200へ戻る(S210)。
【0075】
一方、マップマッチングの仮定で、推定位置と最寄りの道路との距離が所定距離以内でないと判定されたときは(S208:No)、マップマッチングの処理を中止するとともに、表示制御部13は推定位置に基づく現在位置の表示を行わない。そして、表示制御部13は、それ以降、改めてGPS測位による新たな車両位置32が検出されるのを待つ(S214、S216)。つまり、再びGPS測位が可能になり、新たな車両位置32が検出されるまでは、ディスプレイ5には現在位置の表示が行われない。
【0076】
これにより、GPS測位が途切れた場合でも、推定位置が妥当であると考えられる範囲内であるときに限り、推定位置に基づく現在位置を地図画像上に表示させることができる。
【0077】
次に、リンクマッチングによって、直進性のない不連続な道路リンクにマッチングされたミスマッチを検出して修正する処理手順を、図9のフローチャートを参照して説明する。
【0078】
マッチング処理部19は、時刻31の車両位置32のリンクマッチングを行う(S300)。そして、マッチング処理部19は、そのときの時刻51及び車両位置52とともに、リンクマッチングの結果である補正位置53及び対応付けられた道路リンク54をマッチング記憶部23に記憶する。
【0079】
マッチング処理部19は、マッチング記憶部23を参照し、最新の時刻51Aの道路リンク(最新リンク)54Aと、最新の時刻より1つ前の直前の時刻51Bの道路リンク(直前リンク)54Bとが、直進性を有しない不連続の関係であるか否かを判定する(ステップS302)。
【0080】
最新リンク54Aと直前リンク54Bとが直進性を有しない不連続の関係ではないと判定された場合には(S302:No)、ステップS306へスキップする。
【0081】
一方、最新リンク54Aと直前リンク54Bとが、直進性を有しない不連続の関係であると判定された場合には(S302:Yes)、マッチング処理部19が変位角データ記憶部20を参照して、最新の時刻51Aと直前の時刻51Bとの間の変位角を判定する(S304)。すなわち、最新リンク54Aと直前リンク54Bとが直進性を有しない不連続な位置であるので、その道路リンク間を移動した場合に存在するはずである変位角の変化が、変位角データ記憶部20に記録されているか否かを判定する。
【0082】
ここで、最新の時刻51Aと直前の時刻51Bとの間に、直前リンク54Bから最新リンク51Aへ移動したことに対応する変位角が検出されていた場合(S304:Yes)、最新リンク54Aに対するリンクマッチングは正しいと判断され、表示制御部13が、リンクマッチングの結果に従って、ディスプレイ5上に地図画像を表示する(S306)。
【0083】
一方、最新の時刻51Aと直前の時刻51Bとの間に、直前リンク54Bから最新リンク51Aへ移動したことに対応する変位角が検出されていない場合は(S304:No)、マッチング処理部19は、最新リンク51Aを除外して再マッチングを行う(S308,S300)。つまり、ステップS300へ戻り、マッチング処理部19が最新リンク51A以外の道路リンクにマッチングされるようにして再マッチングを行う。
【0084】
これにより、ビル街などで生じることが多いGPS測位のズレに起因するミスマッチを防ぎ、リンクマッチングの精度を向上させることができる。
【0085】
上述した本発明の実施形態は、本発明の説明のための例示であり、本発明の範囲をそれらの実施形態にのみ限定する趣旨ではない。当業者は、本発明の要旨を逸脱することなしに、他の様々な態様で本発明を実施することができる。
【符号の説明】
【0086】
1 地図表示装置
3 車両
4 地図データ処理部
6 GPS受信機
7 ジャイロスコープ
10 地図データ取得部
11 演算処理部
12 車両データ記憶部
13 表示制御部
14 条件記憶部
15 条件判定部
16 ルート検索部
17 抽出部
18 位置推定部
19 マッチング処理部
20 変位角データ記憶部
23 マッチング記憶部
【特許請求の範囲】
【請求項1】
地図画像を表示するための地図データを記憶した地図記憶部と、前記地図データに基づく地図画像を表示する表示部と、移動体の向きの変位角を検出するジャイロスコープと、GPS信号を受信するGPS受信機と、を備えた地図画像表示装置が地図データを処理するためのコンピュータプログラムであって、
前記地図画像表示装置に、
前記GPS受信機が受信したGPS信号に基づいて、前記移動体の現在位置を検出する位置検出ステップと、
前記GPS信号に基づいた位置検出ができないとき、位置検出が不能になる以前の前記移動体の状態及び位置検出が不能になった以降のジャイロスコープの出力に基づいて、前記移動体の現在位置を推定する位置推定ステップと、
前記位置検出ステップによって検出された現在位置または前記位置推定ステップによって推定された現在位置に応じて、前記表示部の地図画像上に現在位置を表示させる表示ステップであって、前記推定された現在位置と道路との乖離が所定距離以上であれば、前記推定された現在位置に応じた現在位置の表示を行わない、前記表示ステップと、を実行させるコンピュータプログラム。
【請求項2】
前記位置推定ステップは、前記GPS信号に基づいた移動体の位置検出が不能となった第1の時刻以前の前記移動体の走行速度、及び前記第1の時刻以降のジャイロスコープ7の出力に基づいて現在位置を推定する、請求項1記載のコンピュータプログラム。
【請求項3】
前記位置推定ステップは、前記第1の時刻以前の前記移動体の走行速度が所定速度以上であるときに現在位置の推定を行う、請求項2記載のコンピュータプログラム。
【請求項4】
地図画像を表示するための地図データを記憶した地図記憶部と、
前記地図データに基づく地図画像を表示する表示部と、
移動体の向きの変位角を検出するジャイロスコープと、
GPS信号を受信するGPS受信機と、
前記GPS受信機が受信したGPS信号に基づいて、前記移動体の現在位置を検出する位置検出部と、
前記GPS信号に基づいた位置検出ができないとき、位置検出が不能になる以前の前記移動体の状態及び位置検出が不能になった以降のジャイロスコープの出力に基づいて、前記移動体の現在位置を推定する位置推定部と、
前記位置検出部によって検出された現在位置または前記位置推定部によって推定された現在位置に応じて、前記表示部の地図画像上に現在位置を表示させる表示制御部であって、前記推定された現在位置と道路との乖離が所定距離以上であれば、前記推定された現在位置に応じた現在位置の表示を行わない、前記表示制御部と、を備える地図画像表示装置。
【請求項5】
地図画像を表示するための地図データを記憶した地図記憶部と、前記地図データに基づく地図画像を表示する表示部と、移動体の向きの変位角を検出するジャイロスコープと、GPS信号を受信するGPS受信機と、を備えた地図画像表示装置が地図データを処理するための方法であって、
前記地図画像表示装置が、
前記GPS受信機が受信したGPS信号に基づいて、前記移動体の現在位置を検出する位置検出ステップと、
前記GPS信号に基づいた位置検出ができないとき、位置検出が不能になる以前の前記移動体の状態及び位置検出が不能になった以降のジャイロスコープの出力に基づいて、前記移動体の現在位置を推定する位置推定ステップと、
前記位置検出ステップによって検出された現在位置または前記位置推定ステップによって推定された現在位置に応じて、前記表示部の地図画像上に現在位置を表示させる表示ステップであって、前記推定された現在位置と道路との乖離が所定距離以上であれば、前記推定された現在位置に応じた現在位置の表示を行わない、前記表示ステップと、を行う方法。
【請求項1】
地図画像を表示するための地図データを記憶した地図記憶部と、前記地図データに基づく地図画像を表示する表示部と、移動体の向きの変位角を検出するジャイロスコープと、GPS信号を受信するGPS受信機と、を備えた地図画像表示装置が地図データを処理するためのコンピュータプログラムであって、
前記地図画像表示装置に、
前記GPS受信機が受信したGPS信号に基づいて、前記移動体の現在位置を検出する位置検出ステップと、
前記GPS信号に基づいた位置検出ができないとき、位置検出が不能になる以前の前記移動体の状態及び位置検出が不能になった以降のジャイロスコープの出力に基づいて、前記移動体の現在位置を推定する位置推定ステップと、
前記位置検出ステップによって検出された現在位置または前記位置推定ステップによって推定された現在位置に応じて、前記表示部の地図画像上に現在位置を表示させる表示ステップであって、前記推定された現在位置と道路との乖離が所定距離以上であれば、前記推定された現在位置に応じた現在位置の表示を行わない、前記表示ステップと、を実行させるコンピュータプログラム。
【請求項2】
前記位置推定ステップは、前記GPS信号に基づいた移動体の位置検出が不能となった第1の時刻以前の前記移動体の走行速度、及び前記第1の時刻以降のジャイロスコープ7の出力に基づいて現在位置を推定する、請求項1記載のコンピュータプログラム。
【請求項3】
前記位置推定ステップは、前記第1の時刻以前の前記移動体の走行速度が所定速度以上であるときに現在位置の推定を行う、請求項2記載のコンピュータプログラム。
【請求項4】
地図画像を表示するための地図データを記憶した地図記憶部と、
前記地図データに基づく地図画像を表示する表示部と、
移動体の向きの変位角を検出するジャイロスコープと、
GPS信号を受信するGPS受信機と、
前記GPS受信機が受信したGPS信号に基づいて、前記移動体の現在位置を検出する位置検出部と、
前記GPS信号に基づいた位置検出ができないとき、位置検出が不能になる以前の前記移動体の状態及び位置検出が不能になった以降のジャイロスコープの出力に基づいて、前記移動体の現在位置を推定する位置推定部と、
前記位置検出部によって検出された現在位置または前記位置推定部によって推定された現在位置に応じて、前記表示部の地図画像上に現在位置を表示させる表示制御部であって、前記推定された現在位置と道路との乖離が所定距離以上であれば、前記推定された現在位置に応じた現在位置の表示を行わない、前記表示制御部と、を備える地図画像表示装置。
【請求項5】
地図画像を表示するための地図データを記憶した地図記憶部と、前記地図データに基づく地図画像を表示する表示部と、移動体の向きの変位角を検出するジャイロスコープと、GPS信号を受信するGPS受信機と、を備えた地図画像表示装置が地図データを処理するための方法であって、
前記地図画像表示装置が、
前記GPS受信機が受信したGPS信号に基づいて、前記移動体の現在位置を検出する位置検出ステップと、
前記GPS信号に基づいた位置検出ができないとき、位置検出が不能になる以前の前記移動体の状態及び位置検出が不能になった以降のジャイロスコープの出力に基づいて、前記移動体の現在位置を推定する位置推定ステップと、
前記位置検出ステップによって検出された現在位置または前記位置推定ステップによって推定された現在位置に応じて、前記表示部の地図画像上に現在位置を表示させる表示ステップであって、前記推定された現在位置と道路との乖離が所定距離以上であれば、前記推定された現在位置に応じた現在位置の表示を行わない、前記表示ステップと、を行う方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−73092(P2012−73092A)
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願番号】特願2010−217635(P2010−217635)
【出願日】平成22年9月28日(2010.9.28)
【出願人】(000155469)株式会社野村総合研究所 (1,067)
【Fターム(参考)】
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願日】平成22年9月28日(2010.9.28)
【出願人】(000155469)株式会社野村総合研究所 (1,067)
【Fターム(参考)】
[ Back to top ]