
地図表示装置及び地図表示方法
【課題】装飾的効果に富んだ遠景表示を行う「地図表示装置及び地図表示方法」を提供する。
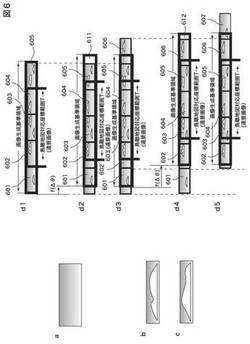
【解決手段】地図表示方位角度範囲及びその周辺分の遠景を表現した画像を、青空背景画像(a)の上にランダムに雲画像(b、c)を描画した複数のブロック601〜605の集合として生成し(d1)、生成した画像の地図表示方位角度範囲に対応する部分を、鳥瞰図的に作成した地図の地平線上に配置して表示地図画像とする。地図表示方位角度範囲が変化し、新たに地図表示角度範囲周辺となった方位角度範囲611が発生した場合(d2)、この方位角度範囲を含む所定大きさの角度範囲分の遠景を表す画像としてブロック606を生成する(d3)。また、地図表示方位角度範囲が変化し地図表示方位角度範囲及びその周辺から外れたブロック601が発生したならば(d4)、このブロック601を消去する(d5)。
【解決手段】地図表示方位角度範囲及びその周辺分の遠景を表現した画像を、青空背景画像(a)の上にランダムに雲画像(b、c)を描画した複数のブロック601〜605の集合として生成し(d1)、生成した画像の地図表示方位角度範囲に対応する部分を、鳥瞰図的に作成した地図の地平線上に配置して表示地図画像とする。地図表示方位角度範囲が変化し、新たに地図表示角度範囲周辺となった方位角度範囲611が発生した場合(d2)、この方位角度範囲を含む所定大きさの角度範囲分の遠景を表す画像としてブロック606を生成する(d3)。また、地図表示方位角度範囲が変化し地図表示方位角度範囲及びその周辺から外れたブロック601が発生したならば(d4)、このブロック601を消去する(d5)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車に搭載されたナビゲーションシステム等の地図を表示する装置において、地平線上の遠景の表現を含む地図表示を行う技術に関するものである。
【背景技術】
【0002】
地平線上の遠景の表現を含む地図表示を行う技術としては、予め全周360度分の遠景を表現した遠景画像を用意しておき、遠景画像中の地図の表示方位範囲に対応する画像部分を切り出して、鳥瞰図的に作成した地図上に、地平線上の遠景を表す画像として表示する技術が知られている(たとえば、特許文献1)。
【特許文献1】特許3250554号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
前述した地平線上の遠景を表現した地図表示を行う技術によれば、あらかじめ、全周360度分の遠景を表現した比較的大きなサイズの遠景画像を用意する必要があるため、比較的多くの記憶資源を遠景表現のためにだけ消費してしまうことになる。また、地図の表示方位が同じであれば同じ遠景が表現されることになるので変化に乏しく興趣に欠ける。
【0004】
そこで、本発明は、地図表示において地平線上の遠景を、より視覚的効果に富んだ形態で表示することを課題とする。
【課題を解決するための手段】
【0005】
前記課題達成のために、本発明は、地図を表す地図画像を表示する地図表示装置に、上方より斜め下方に地図表示範囲を観測したようすを模擬した、観測の視点からみた方位角度範囲が所定の大きさの地図である鳥瞰地図を生成する鳥瞰地図生成手段と、前記鳥瞰地図の方位角度範囲内についての地平線上の遠景を表現する遠景画像を生成する遠景画像生成手段と、前記鳥瞰地図の上部に前記遠景画像を配置した地図画像を生成する地図画像生成手段とを備え、前記遠景画像生成手段において、前記鳥瞰地図の方位角度範囲の変化に応答して、当該変化前の遠景画像のうちの前記鳥瞰地図の方位角度範囲外となった方位角度範囲についての地平線上の遠景を表現する画像部分を消去すると共に、前記鳥瞰地図の方位角度範囲に新たに含まれることとなった方位角度範囲についての地平線上の遠景を表現する画像を生成して、前記遠景画像に含めるようにしたものである。
【0006】
このような地図表示装置によれば、各方位角度について、その方位角度の遠景の表示が必要になった時点で遠景を表す画像を生成するので、予め全周360度分の遠景を表現した比較的大きなサイズの遠景画像を用意することなく任意方位について地平線上の遠景を表した地図画像の表示を行うことができるようになる。
【0007】
また、前記課題達成のために、本発明は、地図を表す地図画像を表示する地図表示装置に、上方より斜め下方に地図表示範囲を観測したようすを模擬した、観測の視点からみた方位角度範囲が所定の大きさの地図である鳥瞰地図を生成する鳥瞰地図生成手段と、前記鳥瞰地図の方位角度範囲と当該方位角度範囲周辺の方位角度範囲とを含む方位角度範囲である基準方位角度範囲内についての地平線上の遠景を表現する遠景画像を生成する遠景画像生成手段と、前記遠景画像のうちの前記鳥瞰地図の方位角度範囲についての地平線上の遠景を表現する画像部分を、前記鳥瞰地図の上部に配置した地図画像を生成する地図画像生成手段とを備え、前記遠景画像生成手段において、前記鳥瞰地図の方位角度範囲の変化に伴う前記基準方位角度範囲の変化に応答して、当該変化前の遠景画像のうちの前記基準方位角度範囲外となった方位角度範囲についての地平線上の遠景を表現する画像部分を消去すると共に、前記基準方位角度範囲に新たに含まれることとなった方位角度範囲についての地平線上の遠景を表現する画像を生成して、前記遠景画像に含めるようにしたものである。
【0008】
このような地図表示装置によれば、各方位角度について、その方位角度に、現在表示されている鳥瞰地図の方位角度が接近した時点で、その方位角度が表示が近い将来に行われる蓋然性が高いと推測して、遠景を表す画像を生成するので、予め全周360度分の遠景を表現した比較的大きなサイズの遠景画像を用意することなく任意方位について地平線上の遠景を表した地図画像の表示を行うことができるようになる。また、各方位角度についてその遠景の表示が必要となる前に、その方位角度についての遠景を表す画像を先行して生成しておくので、鳥瞰地図の方位角度変化に対する応答性に優れた地図画像の表示が可能となる。
【0009】
ここで、以上の各地図表示装置は、前記遠景画像生成手段において、前記地平線上の遠景を表現する画像として、当該画像の生成の度にランダム性をもって内容が変化する画像を生成することが好ましい。より具体的には、たとえば、前記遠景画像生成手段において、前記地平線上の遠景を表現する画像として、生成しようとする画像領域内に遠方物を表す遠方物画像をランダムに描画した画像を生成するようにしてもよい。また、この場合には、前記遠方物を表す遠方物画像を雲を表す雲画像として、前記遠景画像生成手段において、前記地平線上の遠景を表現する画像として、予め用意した相互に異なる複数の雲画像のうちから、ランダムに雲画像を選択して、生成しようとする画像領域内に選択した雲画像の配置位置をランダムに設定し、設定した配置位置に選択した雲画像を、当該雲画像の配置位置が下方であるほど描画サイズが小さくなるように描画した画像を生成するようにしてもよい。
【0010】
これらのようにすることにより、地図画像における同じ方位についての遠景を、その方位が表示方位角度範囲または表示方位角度範囲及びその周辺に含まれるようになる度に変化させることができる。したがって、装飾的変化に富んだ興趣ある地図表示を行うことができる。
ところで、以上の各地図表示装置は、ナビゲーションシステムなどにおける地図表示に適用することができる。すなわち、この場合には、ナビゲーションシステムを、たとえば、地図表示装置と、現在位置及び現在の進行方向を検出する現在状況検出手段とを含めて構成し、前記鳥瞰地図生成手段において、前記現在状況検出手段が検出した現在位置と進行方向とより定まる上方位置より、前記進行方向に向かって斜め下方に地図表示範囲を観測したようすを模擬した地図である鳥瞰地図を生成するようにすればよい。
【発明の効果】
【0011】
以上のように本発明によれば、地図表示において地平線上の遠景を、より視覚的効果に富んだ形態で表示することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施形態について説明する。
まず、第1の実施形態についてナビゲーションシステムへの適用を例にとり説明する。
図1に、本実施形態に係るナビゲーションシステムの構成を示す。
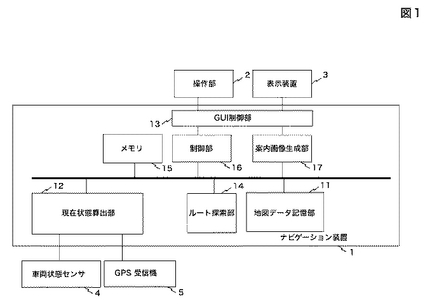
図示するように、ナビゲーションシステムは、ナビゲーション装置1と、操作部2と、表示装置3と、車両状態センサ4と、GPS受信機5とを備えて構成される。ここで、車両状態センサ4は、角加速度センサや地磁気センサなどである方位センサや車速パルスセンサなどである車速センサなどの車両状態を検出するセンサ群である。
【0013】
そして、ナビゲーション装置1は、 地図を表す地図データを記憶したDVDドライブやHDDなどの記憶装置である地図データ記憶部11、現在状態算出部12、GUI制御部13、ルート探索部14、メモリ15、制御部16、案内画像生成部17とを有する。
但し、以上のナビゲーション装置1は、ハードウエア的には、マイクロプロセッサや、メモリや、その他のグラフィックプロセッサやジオメトリックプロセッサ等の周辺デバイスを有する一般的な構成を備えたCPU回路であって良く、この場合、以上に示したナビゲーション装置1の各部は、マイクロプロセッサが予め用意されたプログラムを実行することにより具現化するプロセスとして実現されるものであって良い。また、この場合、このようなプログラムは、記録媒体や適当な通信路を介して、ナビゲーション装置1に提供されるものであって良い。
【0014】
次に、図2に地図データ記憶部11に記憶される地図データの内容を示す。
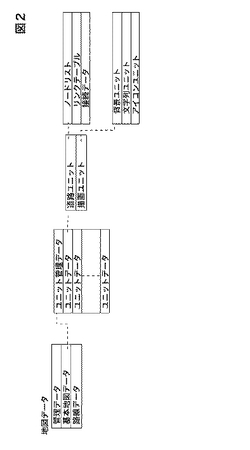
ここで、地図データは、所定の地理的区域毎に図葉と呼ばれる単位で管理されており、図葉の地理的区域またはこれを分割した区域に対応したユニットが設けられている。そして、各ユニットは、自身が属する図葉の地理的区域またはこれを分割した区域に対応し、対応する区域の地図を表現するものである。
そして、図2に示すように、地図データは、各ユニットと図葉や対応区域との関係や、地図データの製作日時などを記述した管理データ、地図を表す基本地図データ、路線データとを含んで構成される。
そして、基本地図データは、前述したユニット毎のユニットデータと、各ユニットデータと図葉や対応区域との関係を記述したユニット管理データを含む。そして、各ユニットデータはユニット内の道路ネットワークを表す道路ユニットと、ユニット内の表示地図を規定する描画ユニットとを有する。
【0015】
次に、道路ユニットは道路網を表すデータであり、ノードリストと、リンクテーブルと、接続データとを有する。
ここで、道路ユニットでは、道路を直線であるリンクの集合として表現しており、この各リンクの端点がノードである。そして、ノードリストは、各ノードの座標や、各ノードの交差点に相当するノードであるか等を表す属性などを示すデータである。また、リンクテーブルは、各リンクの両端のノードの識別や、各リンクの距離や方位や、各リンクリに与えた経路探索用のコストであるリンクコストや、リンクの属する路線の路線番号等を示すデータである。そして、接続データは、他ユニットとのノードやリンクの接続、対応関係を記述したデータである。
【0016】
次に、描画ユニットは、地形図形や道路図形や建物図形などの地図の地理的な表示要素となる各図形を規定する背景ユニットと、建物名称や道路名称や交差点名称などの地図上に表示する各文字列を規定する文字列ユニットと、駐車場やガソリンスタンド等の施設の存在を表すために地図上に表示するマークであるアイコンを規定するアイコンユニットとを有する。
【0017】
次に、地図データに含まれる路線データは、各道路毎に設けられた路線レコードを有し、各路線レコードには、道路の識別子である路線番号や、各道路の高速道路、国道、県道などの路線種別や、各道路の道路名称が記述される。
さて、このような構成において、ナビゲーション装置1の現在状態算出部12は、以下の処理を繰り返し行う。
すなわち、現在状態算出部12は、車両状態センサ4やGPS受信機5の出力から推定される現在位置に対して、地図データ記憶部11から読み出した地図データが示す前回決定した現在位置の周辺の地図とのマップマッチング処理などを施して、現在位置として最も確からしい座標と、現在の進行方向として最も確からしい方向と、現在の走行中のリンクとして最も確からしいリンクとを、それぞれ現在位置、現在進行方位、走行中リンクとして決定し、メモリ15に設定する。
【0018】
また、制御部16は、ユーザの目的地設定要求に応じて、ユーザから操作部2、GUI制御部13を介して目的地の設定を受付け、これをメモリ15にセットする。そして、目的地までの推奨ルートをルート探索部14に探索させる。ルート探索部14は、必要地理的範囲の道路ユニットのデータを地図データ記憶部11から読み出し、メモリ15に設定されている現在位置から目的地までの、走行中リンクを最初に辿る最小コストの経路を、リンクテーブルに記述されたリンクコストなどを用いた所定のコストモデルに基づいて推奨ルートとして算出し、算出した推奨ルートの経路データを、メモリ15にセットする。ここで、制御部16は、メモリ15にセットされた現在位置が目的地近傍となったならば、目的地到着と判定し、メモリ15にセットされている目的地と推奨ルートをクリアする処理も行う。
【0019】
また、制御部16はメモリ15にセットされた現在位置またはユーザが操作部2を用いて指定したポイントを基準位置とし、メモリ15にセットされた現在進行方向またはユーザから指定された方位を地図表示方位とし、基準位置と地図表示方位とその時点で設定されている地図の表示縮尺とに従って定まる地理的範囲を地図の表示範囲とし、地図表示範囲と地図表示方位を案内画像生成部17に通知する処理を繰り返す。
【0020】
一方、案内画像生成部17は、地図画像生成処理と地平線上画像生成処理によって、制御部16から通知された地図表示範囲と地図表示方位に従った地図画像を地図データの基本地図データのユニットデータの描画ユニット等に基づいて生成し、生成した地図画像上に、メモリ15にセットされている現在位置や推奨ルートや目的地を地図画像上に描画して案内画像を生成し、GUI制御部13を介して表示装置3に表示する。
【0021】
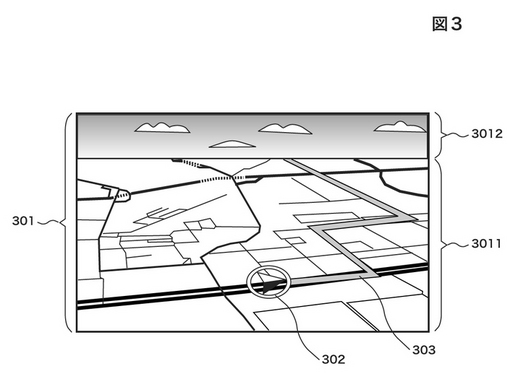
ここで、図3に、このようにして表示装置3に表示される案内画像の例を示す。
図示するように、案内画像は、鳥瞰図的に描画された地図の画像である鳥瞰地図画像3011の上に地平線上の空を表す遠景画像3012を配置して描画した地図画像301上に、現在位置を表す現在位置マーク302や、推奨ルートを表すルート図形303などを描画したものとなる。また、表示範囲内に目的地が含まれる場合には、目的地を表す目的地マークも地図画像301上に表示されることになる。
【0022】
以下、このような地図画像の生成のために案内画像生成部17が行う地図画像生成処理と地平線上画像生成処理について説明する。
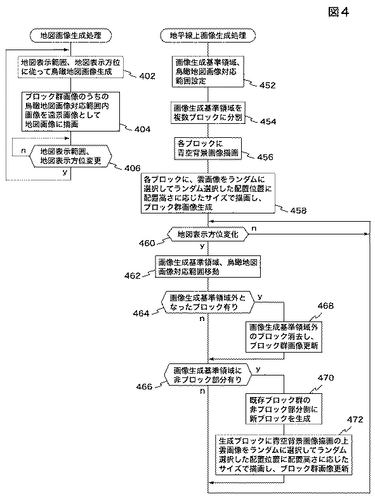
図4aに地図画像生成処理の手順を示す。
図示するように、この処理では、まず、地図表示範囲と地図表示方位に従って鳥瞰図的に生成した地図の画像である鳥瞰地図画像を生成する(ステップ402)。
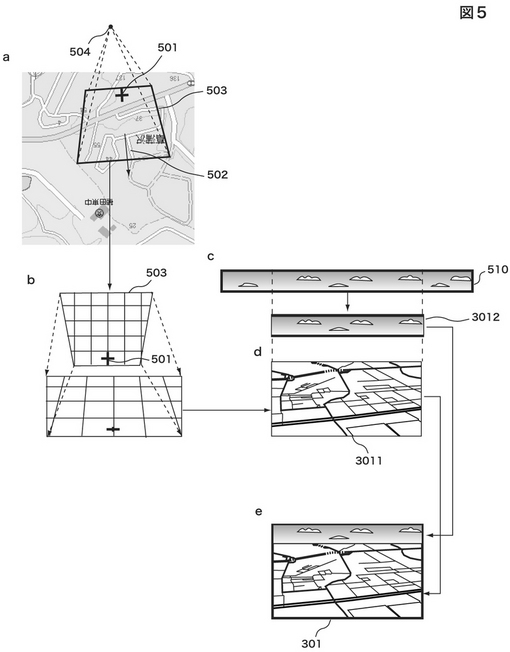
ここで、地図表示範囲は、図5aに示すように、現在位置などの基準位置501に対して、基準位置501から地図表示方位方向502に進むほど地図表示方位方向502と垂直な方向の範囲が広くなる台形形状の地理的範囲503として設定される。そして、地図データの描画ユニットが表す地図表示領域503内の地図を図5bに示すように長方形の地図に座標変換によって変形することにより、図5aの地図上空の視点位置504から地図表示方位方向502に向かって斜め下方向に地図を観測した鳥瞰地図画像3011を図5dに示すように作成する。
【0023】
図4aに戻り、鳥瞰地図画像を生成したならば、案内画像生成部17は、次に、後述する地平線上画像生成処理によって生成されるブロック群画像510のうちの、鳥瞰地図画像3011に対応する左右方向座標範囲内の画像部分を抽出して遠景画像3012とし、作成した鳥瞰地図画像3011の上に配置して地図画像301を生成する(ステップ404)。
【0024】
ここで、図5cに示すように地平線上画像生成処理によって生成されるブロック群画像は、鳥瞰地図画像3011よりも左右方向に大きい画像として生成される。また、地平線上画像生成処理によって、ブロック群画像には、鳥瞰地図画像3011に対応する左右方向座標範囲が設定される。また、ブロック群画像の、鳥瞰地図画像3011に対応する左右方向座標範囲内の画像部分が遠景画像3012として抽出される。そして、図5eに示すように、抽出した3012を、図5dの鳥瞰地図画像3011の上に配置して地図画像301が作成される。
【0025】
そして、制御部16から通知される地図表示範囲または地図表示方位の変化を待って(ステップ406)、ステップ402からの処理を繰り返す。
次に、前述したブロック群画像を生成する地平線上画像生成処理について説明する。
図4bに、この地平線上画像生成処理の詳細について説明する。
まず、座標系V上に、画像生成基準領域と、鳥瞰地図画像に対応する左右方向座標範囲を設定する(ステップ452)。画像生成基準領域は、鳥瞰地図画像の横方向画素数をLとし、生成しようとする遠景画像の上下方向画素数をMとして、左右方向の画像座標範囲が0〜{(n+2i)×L}/nであり、上下方向の画素座標範囲が0からMである領域として設定する。そして、(i×L)/n〜{(n+i)×L}/nの左右方向座標範囲を、鳥瞰地図画像の左右方向座標範囲に対応づける。すなわち、画像生成基準領域の左右方向中央が、鳥瞰地図画像の左右方向中央に対応するように、座標系V上の左右方向座標を鳥瞰地図画像の左右方向座標範囲に対応づける。ただし、{(n+2i)×θ}/n<360度とする。ここでθは、鳥瞰地図画像の水平方向の視野角であり、鳥瞰地図画像に含まれる地平線が全周360度中の何度分の角度を表現しているかを表す。すなわち、画像生成基準領域の左右方向の大きさは、全周360度に対応する左右方向サイズ未満の大きさとする。
【0026】
次に、座標系V上で、画像生成基準領域に設定した左右方向の画像座標範囲を、左右方向にn+2iの領域に分割し、分割した各々左右方向座標範囲の大きさがL/nであり、上下方向座標範囲が0〜Mである領域を、各々ブロックとする(ステップ454)。
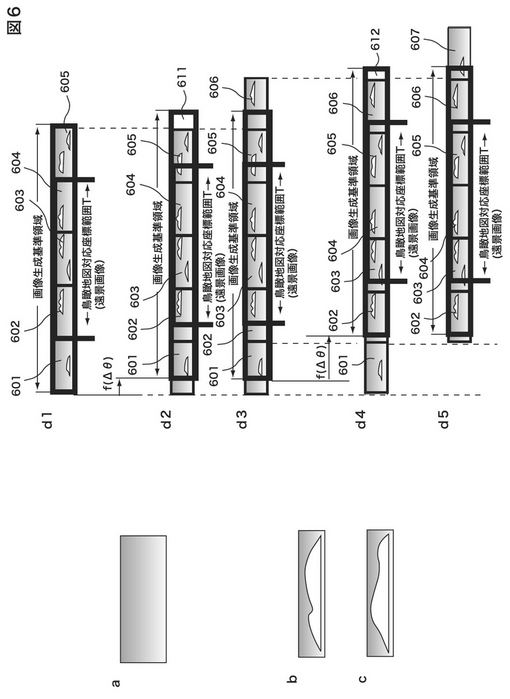
そして、各ブロックを、予め用意した青空を表現した図6aに示すような青空背景画像で塗りつぶす(ステップ456)。そして、各ブロックについて雲画像の描画を行う(ステップ458)。すなわち、予め用意しておいた図6b、cに示すような異なる形態の複数の雲画像のうちからランダムに雲画像をランダム数選択して、選択した各雲画像のブロック内の配置位置をランダムに決定し、選択した各雲画像を決定したブロック内の配置位置に描画する。ただし、各雲画像は、配置位置がブロック内で下側であるほど小さく縮小して描画することにより、遠景の遠近感が表現されるようにする。また、雲画像の配置位置は、ブロック外に雲画像がはみ出さないように、すなわち、ブロック内に必ず雲画像の全てが収まるように定める。そして、このように青空背景画像の上に雲画像をランダムに描画して生成した各ブロックの画像の連結によって形成される画像を前述したブロック群画像とする。
【0027】
そして、地図表示方位の変化を監視し(ステップ460)、地図表示方位が変化したならば、画像生成基準領域を再設定する(ステップ462)。すなわち、鳥瞰地図画像の水平方向の視野角をθ、地図表示方位の変化をΔθとして、{(Δθ×L)/θ)}左右方向に画像生成基準領域を座標系V上で移動する。また、鳥瞰地図画像の左右方向座標範囲に対応づける座標系V上の左右方向座標範囲を、{(Δθ×L)/θ)}左右方向に移動する(ステップ462)。なお、θ、Δθは、視線方向の時計廻り方向の回転(地平線に向かって左から右に視線を移動する方向)を正にとる。
【0028】
次に、座標系V上で移動後の画像生成基準領域外となったブロックが存在するかどうかを調べ(ステップ464)、存在しない場合にはステップ466に進み、存在する場合には、移動後の画像生成基準領域外となったブロックとその画像を消去した上で(ステップ468)、ステップ466に進む。
【0029】
そして、ステップ466では、画像生成基準領域に、いずれのブロックにも属していない部分が存在するかどうかを調べ、存在していなければステップ460からの処理に戻る。一方、いずれのブロックにも属していない部分が存在する場合には、その部分をカバーするように、左右方向の画素座標範囲の大きさがL/nであり、上下方向の画素座標範囲が0からMである新たな座標系V上のブロックを、既存のブロック群のブロック非存在側に連結する形態で配置する(ステップ470)。そして、新たに生成したブロックに対して、青空背景画像で塗りつぶしと、雲画像のランダムな描画を前述のように行って(ステップ472)、新たなブロックの画像と既存のブロックの画像の連結を、新たなブロック群画像とし、ステップ460からの処理に戻る。
【0030】
以上、地平線上画像生成処理について説明した。
以下、以上の処理による遠景画像の生成例について説明する。
ここでは、一例として図6aに示すように、前述したi、nをi=1、n=3として、左右方向画素座標範囲の大きさが5L/3の領域を画像生成基準領域として設定した場合を例にとり説明する。この場合には、まず、図6d1に示すように、鳥瞰地図画像の左右方向の大きさの5/3の左右方向の大きさを持つ画像生成基準領域が設定され、真ん中の3/5の範囲が鳥瞰地図に対応する左右方向座標範囲として設定される。また、画像生成基準領域内に、鳥瞰地図画像の左右方向の大きさの1/3の左右方向大きさを持つブロック601〜605が5つ設定され、この5つのブロック601〜605に青空背景画像を背景に雲画像がランダムに描画されてブロック群画像となる。そして、この5つのブロック601〜605のうちの、鳥瞰地図画像に対応する左右方向座標範囲に対応する真ん中の3つのブロック602〜604の画像部分が遠景画像として抽出されて、鳥瞰地図画像上に配置されて地図画像を形成することになる。
【0031】
次に、表示地図方位がΔθ変化すると、鳥瞰地図上の水平線は、f(Δθ)={(Δθ×L)/θ)}左右方向に移動する。そこで、これに合わせて鳥瞰地図に対応する左右方向座標範囲をf(Δθ)移動する。また、画像生成基準領域を同様にf(Δθ)左右方向に移動する。結果、ブロック群画像中から地図画像を形成する遠景画像として抽出する部分も、表示地図方位の変化に連動して、f(Δθ)左右方向に移動することになる。たとえば、表示地図方位が正方向に変化した場合には、図6d2に示すように、鳥瞰地図に対応する左右方向座標範囲、画像生成基準領域が右方向に移動し、ブロック群画像から遠景画像として抽出する部分も、表示地図方位の正の変化に連動して右方向に移動する。
【0032】
また、この移動によって、図6d2に示すように、画像生成基準領域内の右端に、いずれのブロックにも属さない領域611が発生したならば、図6d3に示すように、新しいブロック606が生成されて、この領域611をカバーするように既存のブロック601〜605の右端に連結される。そして、この生成したブロック606に空背景画像を背景に雲画像がランダムに描画される。そして、ブロック601〜606の画像の連結が新たなブロック群画像となる。
【0033】
次に、さらに、表示地図方位が正方向に変化すると、先ほどと同様に、図6d4に示すように、鳥瞰地図に対応する左右方向座標範囲、画像生成基準領域がさらに右方向に移動し、ブロック群画像から遠景画像として抽出する部分もさらに右方向に移動する。そして、この移動によって、左端のブロック601が、画像生成基準領域に含まれなくなり、図6d5に示すように、このブロック601が消去される。一方で、画像生成基準領域内の右端に、いずれのブロックにも属さない領域612が発生するので、図6d5に示すように、新しいブロック607が生成されて、この領域612をカバーするように既存のブロック602〜606の右端に連結される。そして、この生成したブロック607に空背景画像を背景に雲画像がランダムに描画される。そして、ブロック602〜607の画像の連結が新たなブロック群画像となる。
【0034】
以上、本発明の実施形態について説明した。
以上のように、本実施形態よれば、予め全周360度分の遠景を表現した比較的大きなサイズの遠景画像を用意することなく任意方位について地平線上の遠景を表した地図画像の表示を行うことができる。また、本実施形態によれば、ある方位範囲付近の方位が表示対象となった各回において、その方位範囲の遠景を表現する画像として、ランダムに雲画像を描画した遠景画像を生成するので、表示方位が同じであっても、その方位の遠景は各回ごとに変化する。したがって、装飾的変化に富んだ興趣ある地図表示を行うことができる。
【0035】
なお、以上の実施形態では、ある方位範囲付近の方位が表示対象となった各回において、その方位範囲の遠景画像の部分(ブロック)を生成したが、これは、その方位範囲が表示対象になった時点で、その方位範囲の遠景画像の部分(ブロック)を生成するようにしてもよい。また、この場合には、その方位範囲が表示対象から外れた時点で、その方位範囲の遠景画像の部分(ブロック)を削除するようにしてよい。
また、以上の実施形態では、地平線上の遠景を表す遠景画像として、青空を背景として雲を配置した画像を用いる場合について説明したが、本実施形態のランダムに遠景画像を生成する技術は、その他の表現によって遠景を表す遠景画像を用いる場合について同様に適用することができる。たとえば、夜空を表す背景上に星を表す画像をランダムに描画した画像や、青空を表す背景上の下部に遠方のビル群や山を表す画像をランダムに描画した画像や、夜空を表す背景上の下部に遠方の町明かりをランダムに描画した画像を遠景画像として用いる場合などにも同様に適用することができる。
【図面の簡単な説明】
【0036】
【図1】本発明の実施形態に係るナビゲーションシステムの構成を示すブロック図である。
【図2】本発明の実施形態に係るナビゲーションシステムが備える地図データの内容を示す図である。
【図3】本発明の実施形態に係るナビゲーションシステムの表示画面例を示す図である。
【図4】本発明の実施形態に係るナビゲーションシステムの地図画像生成処理と地平線上画像生成処理を示すフローチャートである。
【図5】本発明の実施形態に係るナビゲーションシステムの地図画像生成例を示す図である。
【図6】本発明の実施形態に係るナビゲーションシステムの遠景画像生成例を示す図である。
【符号の説明】
【0037】
1…ナビゲーション装置、2…操作部、3…表示装置、4…車両状態センサ、5…GPS受信機、11…地図データ記憶部、12…現在状態算出部、13…GUI制御部、14…ルート探索部、15…メモリ、16…制御部、17…案内画像生成部。
【技術分野】
【0001】
本発明は、自動車に搭載されたナビゲーションシステム等の地図を表示する装置において、地平線上の遠景の表現を含む地図表示を行う技術に関するものである。
【背景技術】
【0002】
地平線上の遠景の表現を含む地図表示を行う技術としては、予め全周360度分の遠景を表現した遠景画像を用意しておき、遠景画像中の地図の表示方位範囲に対応する画像部分を切り出して、鳥瞰図的に作成した地図上に、地平線上の遠景を表す画像として表示する技術が知られている(たとえば、特許文献1)。
【特許文献1】特許3250554号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
前述した地平線上の遠景を表現した地図表示を行う技術によれば、あらかじめ、全周360度分の遠景を表現した比較的大きなサイズの遠景画像を用意する必要があるため、比較的多くの記憶資源を遠景表現のためにだけ消費してしまうことになる。また、地図の表示方位が同じであれば同じ遠景が表現されることになるので変化に乏しく興趣に欠ける。
【0004】
そこで、本発明は、地図表示において地平線上の遠景を、より視覚的効果に富んだ形態で表示することを課題とする。
【課題を解決するための手段】
【0005】
前記課題達成のために、本発明は、地図を表す地図画像を表示する地図表示装置に、上方より斜め下方に地図表示範囲を観測したようすを模擬した、観測の視点からみた方位角度範囲が所定の大きさの地図である鳥瞰地図を生成する鳥瞰地図生成手段と、前記鳥瞰地図の方位角度範囲内についての地平線上の遠景を表現する遠景画像を生成する遠景画像生成手段と、前記鳥瞰地図の上部に前記遠景画像を配置した地図画像を生成する地図画像生成手段とを備え、前記遠景画像生成手段において、前記鳥瞰地図の方位角度範囲の変化に応答して、当該変化前の遠景画像のうちの前記鳥瞰地図の方位角度範囲外となった方位角度範囲についての地平線上の遠景を表現する画像部分を消去すると共に、前記鳥瞰地図の方位角度範囲に新たに含まれることとなった方位角度範囲についての地平線上の遠景を表現する画像を生成して、前記遠景画像に含めるようにしたものである。
【0006】
このような地図表示装置によれば、各方位角度について、その方位角度の遠景の表示が必要になった時点で遠景を表す画像を生成するので、予め全周360度分の遠景を表現した比較的大きなサイズの遠景画像を用意することなく任意方位について地平線上の遠景を表した地図画像の表示を行うことができるようになる。
【0007】
また、前記課題達成のために、本発明は、地図を表す地図画像を表示する地図表示装置に、上方より斜め下方に地図表示範囲を観測したようすを模擬した、観測の視点からみた方位角度範囲が所定の大きさの地図である鳥瞰地図を生成する鳥瞰地図生成手段と、前記鳥瞰地図の方位角度範囲と当該方位角度範囲周辺の方位角度範囲とを含む方位角度範囲である基準方位角度範囲内についての地平線上の遠景を表現する遠景画像を生成する遠景画像生成手段と、前記遠景画像のうちの前記鳥瞰地図の方位角度範囲についての地平線上の遠景を表現する画像部分を、前記鳥瞰地図の上部に配置した地図画像を生成する地図画像生成手段とを備え、前記遠景画像生成手段において、前記鳥瞰地図の方位角度範囲の変化に伴う前記基準方位角度範囲の変化に応答して、当該変化前の遠景画像のうちの前記基準方位角度範囲外となった方位角度範囲についての地平線上の遠景を表現する画像部分を消去すると共に、前記基準方位角度範囲に新たに含まれることとなった方位角度範囲についての地平線上の遠景を表現する画像を生成して、前記遠景画像に含めるようにしたものである。
【0008】
このような地図表示装置によれば、各方位角度について、その方位角度に、現在表示されている鳥瞰地図の方位角度が接近した時点で、その方位角度が表示が近い将来に行われる蓋然性が高いと推測して、遠景を表す画像を生成するので、予め全周360度分の遠景を表現した比較的大きなサイズの遠景画像を用意することなく任意方位について地平線上の遠景を表した地図画像の表示を行うことができるようになる。また、各方位角度についてその遠景の表示が必要となる前に、その方位角度についての遠景を表す画像を先行して生成しておくので、鳥瞰地図の方位角度変化に対する応答性に優れた地図画像の表示が可能となる。
【0009】
ここで、以上の各地図表示装置は、前記遠景画像生成手段において、前記地平線上の遠景を表現する画像として、当該画像の生成の度にランダム性をもって内容が変化する画像を生成することが好ましい。より具体的には、たとえば、前記遠景画像生成手段において、前記地平線上の遠景を表現する画像として、生成しようとする画像領域内に遠方物を表す遠方物画像をランダムに描画した画像を生成するようにしてもよい。また、この場合には、前記遠方物を表す遠方物画像を雲を表す雲画像として、前記遠景画像生成手段において、前記地平線上の遠景を表現する画像として、予め用意した相互に異なる複数の雲画像のうちから、ランダムに雲画像を選択して、生成しようとする画像領域内に選択した雲画像の配置位置をランダムに設定し、設定した配置位置に選択した雲画像を、当該雲画像の配置位置が下方であるほど描画サイズが小さくなるように描画した画像を生成するようにしてもよい。
【0010】
これらのようにすることにより、地図画像における同じ方位についての遠景を、その方位が表示方位角度範囲または表示方位角度範囲及びその周辺に含まれるようになる度に変化させることができる。したがって、装飾的変化に富んだ興趣ある地図表示を行うことができる。
ところで、以上の各地図表示装置は、ナビゲーションシステムなどにおける地図表示に適用することができる。すなわち、この場合には、ナビゲーションシステムを、たとえば、地図表示装置と、現在位置及び現在の進行方向を検出する現在状況検出手段とを含めて構成し、前記鳥瞰地図生成手段において、前記現在状況検出手段が検出した現在位置と進行方向とより定まる上方位置より、前記進行方向に向かって斜め下方に地図表示範囲を観測したようすを模擬した地図である鳥瞰地図を生成するようにすればよい。
【発明の効果】
【0011】
以上のように本発明によれば、地図表示において地平線上の遠景を、より視覚的効果に富んだ形態で表示することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施形態について説明する。
まず、第1の実施形態についてナビゲーションシステムへの適用を例にとり説明する。
図1に、本実施形態に係るナビゲーションシステムの構成を示す。
図示するように、ナビゲーションシステムは、ナビゲーション装置1と、操作部2と、表示装置3と、車両状態センサ4と、GPS受信機5とを備えて構成される。ここで、車両状態センサ4は、角加速度センサや地磁気センサなどである方位センサや車速パルスセンサなどである車速センサなどの車両状態を検出するセンサ群である。
【0013】
そして、ナビゲーション装置1は、 地図を表す地図データを記憶したDVDドライブやHDDなどの記憶装置である地図データ記憶部11、現在状態算出部12、GUI制御部13、ルート探索部14、メモリ15、制御部16、案内画像生成部17とを有する。
但し、以上のナビゲーション装置1は、ハードウエア的には、マイクロプロセッサや、メモリや、その他のグラフィックプロセッサやジオメトリックプロセッサ等の周辺デバイスを有する一般的な構成を備えたCPU回路であって良く、この場合、以上に示したナビゲーション装置1の各部は、マイクロプロセッサが予め用意されたプログラムを実行することにより具現化するプロセスとして実現されるものであって良い。また、この場合、このようなプログラムは、記録媒体や適当な通信路を介して、ナビゲーション装置1に提供されるものであって良い。
【0014】
次に、図2に地図データ記憶部11に記憶される地図データの内容を示す。
ここで、地図データは、所定の地理的区域毎に図葉と呼ばれる単位で管理されており、図葉の地理的区域またはこれを分割した区域に対応したユニットが設けられている。そして、各ユニットは、自身が属する図葉の地理的区域またはこれを分割した区域に対応し、対応する区域の地図を表現するものである。
そして、図2に示すように、地図データは、各ユニットと図葉や対応区域との関係や、地図データの製作日時などを記述した管理データ、地図を表す基本地図データ、路線データとを含んで構成される。
そして、基本地図データは、前述したユニット毎のユニットデータと、各ユニットデータと図葉や対応区域との関係を記述したユニット管理データを含む。そして、各ユニットデータはユニット内の道路ネットワークを表す道路ユニットと、ユニット内の表示地図を規定する描画ユニットとを有する。
【0015】
次に、道路ユニットは道路網を表すデータであり、ノードリストと、リンクテーブルと、接続データとを有する。
ここで、道路ユニットでは、道路を直線であるリンクの集合として表現しており、この各リンクの端点がノードである。そして、ノードリストは、各ノードの座標や、各ノードの交差点に相当するノードであるか等を表す属性などを示すデータである。また、リンクテーブルは、各リンクの両端のノードの識別や、各リンクの距離や方位や、各リンクリに与えた経路探索用のコストであるリンクコストや、リンクの属する路線の路線番号等を示すデータである。そして、接続データは、他ユニットとのノードやリンクの接続、対応関係を記述したデータである。
【0016】
次に、描画ユニットは、地形図形や道路図形や建物図形などの地図の地理的な表示要素となる各図形を規定する背景ユニットと、建物名称や道路名称や交差点名称などの地図上に表示する各文字列を規定する文字列ユニットと、駐車場やガソリンスタンド等の施設の存在を表すために地図上に表示するマークであるアイコンを規定するアイコンユニットとを有する。
【0017】
次に、地図データに含まれる路線データは、各道路毎に設けられた路線レコードを有し、各路線レコードには、道路の識別子である路線番号や、各道路の高速道路、国道、県道などの路線種別や、各道路の道路名称が記述される。
さて、このような構成において、ナビゲーション装置1の現在状態算出部12は、以下の処理を繰り返し行う。
すなわち、現在状態算出部12は、車両状態センサ4やGPS受信機5の出力から推定される現在位置に対して、地図データ記憶部11から読み出した地図データが示す前回決定した現在位置の周辺の地図とのマップマッチング処理などを施して、現在位置として最も確からしい座標と、現在の進行方向として最も確からしい方向と、現在の走行中のリンクとして最も確からしいリンクとを、それぞれ現在位置、現在進行方位、走行中リンクとして決定し、メモリ15に設定する。
【0018】
また、制御部16は、ユーザの目的地設定要求に応じて、ユーザから操作部2、GUI制御部13を介して目的地の設定を受付け、これをメモリ15にセットする。そして、目的地までの推奨ルートをルート探索部14に探索させる。ルート探索部14は、必要地理的範囲の道路ユニットのデータを地図データ記憶部11から読み出し、メモリ15に設定されている現在位置から目的地までの、走行中リンクを最初に辿る最小コストの経路を、リンクテーブルに記述されたリンクコストなどを用いた所定のコストモデルに基づいて推奨ルートとして算出し、算出した推奨ルートの経路データを、メモリ15にセットする。ここで、制御部16は、メモリ15にセットされた現在位置が目的地近傍となったならば、目的地到着と判定し、メモリ15にセットされている目的地と推奨ルートをクリアする処理も行う。
【0019】
また、制御部16はメモリ15にセットされた現在位置またはユーザが操作部2を用いて指定したポイントを基準位置とし、メモリ15にセットされた現在進行方向またはユーザから指定された方位を地図表示方位とし、基準位置と地図表示方位とその時点で設定されている地図の表示縮尺とに従って定まる地理的範囲を地図の表示範囲とし、地図表示範囲と地図表示方位を案内画像生成部17に通知する処理を繰り返す。
【0020】
一方、案内画像生成部17は、地図画像生成処理と地平線上画像生成処理によって、制御部16から通知された地図表示範囲と地図表示方位に従った地図画像を地図データの基本地図データのユニットデータの描画ユニット等に基づいて生成し、生成した地図画像上に、メモリ15にセットされている現在位置や推奨ルートや目的地を地図画像上に描画して案内画像を生成し、GUI制御部13を介して表示装置3に表示する。
【0021】
ここで、図3に、このようにして表示装置3に表示される案内画像の例を示す。
図示するように、案内画像は、鳥瞰図的に描画された地図の画像である鳥瞰地図画像3011の上に地平線上の空を表す遠景画像3012を配置して描画した地図画像301上に、現在位置を表す現在位置マーク302や、推奨ルートを表すルート図形303などを描画したものとなる。また、表示範囲内に目的地が含まれる場合には、目的地を表す目的地マークも地図画像301上に表示されることになる。
【0022】
以下、このような地図画像の生成のために案内画像生成部17が行う地図画像生成処理と地平線上画像生成処理について説明する。
図4aに地図画像生成処理の手順を示す。
図示するように、この処理では、まず、地図表示範囲と地図表示方位に従って鳥瞰図的に生成した地図の画像である鳥瞰地図画像を生成する(ステップ402)。
ここで、地図表示範囲は、図5aに示すように、現在位置などの基準位置501に対して、基準位置501から地図表示方位方向502に進むほど地図表示方位方向502と垂直な方向の範囲が広くなる台形形状の地理的範囲503として設定される。そして、地図データの描画ユニットが表す地図表示領域503内の地図を図5bに示すように長方形の地図に座標変換によって変形することにより、図5aの地図上空の視点位置504から地図表示方位方向502に向かって斜め下方向に地図を観測した鳥瞰地図画像3011を図5dに示すように作成する。
【0023】
図4aに戻り、鳥瞰地図画像を生成したならば、案内画像生成部17は、次に、後述する地平線上画像生成処理によって生成されるブロック群画像510のうちの、鳥瞰地図画像3011に対応する左右方向座標範囲内の画像部分を抽出して遠景画像3012とし、作成した鳥瞰地図画像3011の上に配置して地図画像301を生成する(ステップ404)。
【0024】
ここで、図5cに示すように地平線上画像生成処理によって生成されるブロック群画像は、鳥瞰地図画像3011よりも左右方向に大きい画像として生成される。また、地平線上画像生成処理によって、ブロック群画像には、鳥瞰地図画像3011に対応する左右方向座標範囲が設定される。また、ブロック群画像の、鳥瞰地図画像3011に対応する左右方向座標範囲内の画像部分が遠景画像3012として抽出される。そして、図5eに示すように、抽出した3012を、図5dの鳥瞰地図画像3011の上に配置して地図画像301が作成される。
【0025】
そして、制御部16から通知される地図表示範囲または地図表示方位の変化を待って(ステップ406)、ステップ402からの処理を繰り返す。
次に、前述したブロック群画像を生成する地平線上画像生成処理について説明する。
図4bに、この地平線上画像生成処理の詳細について説明する。
まず、座標系V上に、画像生成基準領域と、鳥瞰地図画像に対応する左右方向座標範囲を設定する(ステップ452)。画像生成基準領域は、鳥瞰地図画像の横方向画素数をLとし、生成しようとする遠景画像の上下方向画素数をMとして、左右方向の画像座標範囲が0〜{(n+2i)×L}/nであり、上下方向の画素座標範囲が0からMである領域として設定する。そして、(i×L)/n〜{(n+i)×L}/nの左右方向座標範囲を、鳥瞰地図画像の左右方向座標範囲に対応づける。すなわち、画像生成基準領域の左右方向中央が、鳥瞰地図画像の左右方向中央に対応するように、座標系V上の左右方向座標を鳥瞰地図画像の左右方向座標範囲に対応づける。ただし、{(n+2i)×θ}/n<360度とする。ここでθは、鳥瞰地図画像の水平方向の視野角であり、鳥瞰地図画像に含まれる地平線が全周360度中の何度分の角度を表現しているかを表す。すなわち、画像生成基準領域の左右方向の大きさは、全周360度に対応する左右方向サイズ未満の大きさとする。
【0026】
次に、座標系V上で、画像生成基準領域に設定した左右方向の画像座標範囲を、左右方向にn+2iの領域に分割し、分割した各々左右方向座標範囲の大きさがL/nであり、上下方向座標範囲が0〜Mである領域を、各々ブロックとする(ステップ454)。
そして、各ブロックを、予め用意した青空を表現した図6aに示すような青空背景画像で塗りつぶす(ステップ456)。そして、各ブロックについて雲画像の描画を行う(ステップ458)。すなわち、予め用意しておいた図6b、cに示すような異なる形態の複数の雲画像のうちからランダムに雲画像をランダム数選択して、選択した各雲画像のブロック内の配置位置をランダムに決定し、選択した各雲画像を決定したブロック内の配置位置に描画する。ただし、各雲画像は、配置位置がブロック内で下側であるほど小さく縮小して描画することにより、遠景の遠近感が表現されるようにする。また、雲画像の配置位置は、ブロック外に雲画像がはみ出さないように、すなわち、ブロック内に必ず雲画像の全てが収まるように定める。そして、このように青空背景画像の上に雲画像をランダムに描画して生成した各ブロックの画像の連結によって形成される画像を前述したブロック群画像とする。
【0027】
そして、地図表示方位の変化を監視し(ステップ460)、地図表示方位が変化したならば、画像生成基準領域を再設定する(ステップ462)。すなわち、鳥瞰地図画像の水平方向の視野角をθ、地図表示方位の変化をΔθとして、{(Δθ×L)/θ)}左右方向に画像生成基準領域を座標系V上で移動する。また、鳥瞰地図画像の左右方向座標範囲に対応づける座標系V上の左右方向座標範囲を、{(Δθ×L)/θ)}左右方向に移動する(ステップ462)。なお、θ、Δθは、視線方向の時計廻り方向の回転(地平線に向かって左から右に視線を移動する方向)を正にとる。
【0028】
次に、座標系V上で移動後の画像生成基準領域外となったブロックが存在するかどうかを調べ(ステップ464)、存在しない場合にはステップ466に進み、存在する場合には、移動後の画像生成基準領域外となったブロックとその画像を消去した上で(ステップ468)、ステップ466に進む。
【0029】
そして、ステップ466では、画像生成基準領域に、いずれのブロックにも属していない部分が存在するかどうかを調べ、存在していなければステップ460からの処理に戻る。一方、いずれのブロックにも属していない部分が存在する場合には、その部分をカバーするように、左右方向の画素座標範囲の大きさがL/nであり、上下方向の画素座標範囲が0からMである新たな座標系V上のブロックを、既存のブロック群のブロック非存在側に連結する形態で配置する(ステップ470)。そして、新たに生成したブロックに対して、青空背景画像で塗りつぶしと、雲画像のランダムな描画を前述のように行って(ステップ472)、新たなブロックの画像と既存のブロックの画像の連結を、新たなブロック群画像とし、ステップ460からの処理に戻る。
【0030】
以上、地平線上画像生成処理について説明した。
以下、以上の処理による遠景画像の生成例について説明する。
ここでは、一例として図6aに示すように、前述したi、nをi=1、n=3として、左右方向画素座標範囲の大きさが5L/3の領域を画像生成基準領域として設定した場合を例にとり説明する。この場合には、まず、図6d1に示すように、鳥瞰地図画像の左右方向の大きさの5/3の左右方向の大きさを持つ画像生成基準領域が設定され、真ん中の3/5の範囲が鳥瞰地図に対応する左右方向座標範囲として設定される。また、画像生成基準領域内に、鳥瞰地図画像の左右方向の大きさの1/3の左右方向大きさを持つブロック601〜605が5つ設定され、この5つのブロック601〜605に青空背景画像を背景に雲画像がランダムに描画されてブロック群画像となる。そして、この5つのブロック601〜605のうちの、鳥瞰地図画像に対応する左右方向座標範囲に対応する真ん中の3つのブロック602〜604の画像部分が遠景画像として抽出されて、鳥瞰地図画像上に配置されて地図画像を形成することになる。
【0031】
次に、表示地図方位がΔθ変化すると、鳥瞰地図上の水平線は、f(Δθ)={(Δθ×L)/θ)}左右方向に移動する。そこで、これに合わせて鳥瞰地図に対応する左右方向座標範囲をf(Δθ)移動する。また、画像生成基準領域を同様にf(Δθ)左右方向に移動する。結果、ブロック群画像中から地図画像を形成する遠景画像として抽出する部分も、表示地図方位の変化に連動して、f(Δθ)左右方向に移動することになる。たとえば、表示地図方位が正方向に変化した場合には、図6d2に示すように、鳥瞰地図に対応する左右方向座標範囲、画像生成基準領域が右方向に移動し、ブロック群画像から遠景画像として抽出する部分も、表示地図方位の正の変化に連動して右方向に移動する。
【0032】
また、この移動によって、図6d2に示すように、画像生成基準領域内の右端に、いずれのブロックにも属さない領域611が発生したならば、図6d3に示すように、新しいブロック606が生成されて、この領域611をカバーするように既存のブロック601〜605の右端に連結される。そして、この生成したブロック606に空背景画像を背景に雲画像がランダムに描画される。そして、ブロック601〜606の画像の連結が新たなブロック群画像となる。
【0033】
次に、さらに、表示地図方位が正方向に変化すると、先ほどと同様に、図6d4に示すように、鳥瞰地図に対応する左右方向座標範囲、画像生成基準領域がさらに右方向に移動し、ブロック群画像から遠景画像として抽出する部分もさらに右方向に移動する。そして、この移動によって、左端のブロック601が、画像生成基準領域に含まれなくなり、図6d5に示すように、このブロック601が消去される。一方で、画像生成基準領域内の右端に、いずれのブロックにも属さない領域612が発生するので、図6d5に示すように、新しいブロック607が生成されて、この領域612をカバーするように既存のブロック602〜606の右端に連結される。そして、この生成したブロック607に空背景画像を背景に雲画像がランダムに描画される。そして、ブロック602〜607の画像の連結が新たなブロック群画像となる。
【0034】
以上、本発明の実施形態について説明した。
以上のように、本実施形態よれば、予め全周360度分の遠景を表現した比較的大きなサイズの遠景画像を用意することなく任意方位について地平線上の遠景を表した地図画像の表示を行うことができる。また、本実施形態によれば、ある方位範囲付近の方位が表示対象となった各回において、その方位範囲の遠景を表現する画像として、ランダムに雲画像を描画した遠景画像を生成するので、表示方位が同じであっても、その方位の遠景は各回ごとに変化する。したがって、装飾的変化に富んだ興趣ある地図表示を行うことができる。
【0035】
なお、以上の実施形態では、ある方位範囲付近の方位が表示対象となった各回において、その方位範囲の遠景画像の部分(ブロック)を生成したが、これは、その方位範囲が表示対象になった時点で、その方位範囲の遠景画像の部分(ブロック)を生成するようにしてもよい。また、この場合には、その方位範囲が表示対象から外れた時点で、その方位範囲の遠景画像の部分(ブロック)を削除するようにしてよい。
また、以上の実施形態では、地平線上の遠景を表す遠景画像として、青空を背景として雲を配置した画像を用いる場合について説明したが、本実施形態のランダムに遠景画像を生成する技術は、その他の表現によって遠景を表す遠景画像を用いる場合について同様に適用することができる。たとえば、夜空を表す背景上に星を表す画像をランダムに描画した画像や、青空を表す背景上の下部に遠方のビル群や山を表す画像をランダムに描画した画像や、夜空を表す背景上の下部に遠方の町明かりをランダムに描画した画像を遠景画像として用いる場合などにも同様に適用することができる。
【図面の簡単な説明】
【0036】
【図1】本発明の実施形態に係るナビゲーションシステムの構成を示すブロック図である。
【図2】本発明の実施形態に係るナビゲーションシステムが備える地図データの内容を示す図である。
【図3】本発明の実施形態に係るナビゲーションシステムの表示画面例を示す図である。
【図4】本発明の実施形態に係るナビゲーションシステムの地図画像生成処理と地平線上画像生成処理を示すフローチャートである。
【図5】本発明の実施形態に係るナビゲーションシステムの地図画像生成例を示す図である。
【図6】本発明の実施形態に係るナビゲーションシステムの遠景画像生成例を示す図である。
【符号の説明】
【0037】
1…ナビゲーション装置、2…操作部、3…表示装置、4…車両状態センサ、5…GPS受信機、11…地図データ記憶部、12…現在状態算出部、13…GUI制御部、14…ルート探索部、15…メモリ、16…制御部、17…案内画像生成部。
【特許請求の範囲】
【請求項1】
地図を表す地図画像を表示する地図表示装置であって、
上方より斜め下方に地図表示範囲を観測したようすを模擬した、観測の視点からみた方位角度範囲が所定の大きさの地図である鳥瞰地図を生成する鳥瞰地図生成手段と、
前記鳥瞰地図の方位角度範囲内についての地平線上の遠景を表現する遠景画像を生成する遠景画像生成手段と、
前記鳥瞰地図の上部に前記遠景画像を配置した地図画像を生成する地図画像生成手段とを有し、
前記遠景画像生成手段は、前記鳥瞰地図の方位角度範囲の変化に応答して、当該変化前の遠景画像のうちの前記鳥瞰地図の方位角度範囲外となった方位角度範囲についての地平線上の遠景を表現する画像部分を消去すると共に、前記鳥瞰地図の方位角度範囲に新たに含まれることとなった方位角度範囲についての地平線上の遠景を表現する画像を生成して、前記遠景画像に含めることを特徴とする地図表示装置。
【請求項2】
地図を表す地図画像を表示する地図表示装置であって、
上方より斜め下方に地図表示範囲を観測したようすを模擬した、観測の視点からみた方位角度範囲が所定の大きさの地図である鳥瞰地図を生成する鳥瞰地図生成手段と、
前記鳥瞰地図の方位角度範囲と当該方位角度範囲周辺の方位角度範囲とを含む方位角度範囲である基準方位角度範囲内についての地平線上の遠景を表現する遠景画像を生成する遠景画像生成手段と、
前記遠景画像のうちの前記鳥瞰地図の方位角度範囲についての地平線上の遠景を表現する画像部分を、前記鳥瞰地図の上部に配置した地図画像を生成する地図画像生成手段とを有し、
前記遠景画像生成手段は、前記鳥瞰地図の方位角度範囲の変化に伴う前記基準方位角度範囲の変化に応答して、当該変化前の遠景画像のうちの前記基準方位角度範囲外となった方位角度範囲についての地平線上の遠景を表現する画像部分を消去すると共に、前記基準方位角度範囲に新たに含まれることとなった方位角度範囲についての地平線上の遠景を表現する画像を生成して、前記遠景画像に含めることを特徴とする地図表示装置。
【請求項3】
請求項1または2記載の地図表示装置であって、
前記遠景画像生成手段は、前記地平線上の遠景を表現する画像として、当該画像の生成の度にランダム性をもって内容が変化する画像を生成することを特徴とする地図表示装置。
【請求項4】
請求項1または2記載の地図表示装置であって、
前記遠景画像生成手段は、前記地平線上の遠景を表現する画像として、生成しようとする画像領域内に遠方物を表す遠方物画像をランダムに描画した画像を生成することを特徴とする地図表示装置。
【請求項5】
請求項4記載の地図表示装置であって、
前記遠方物を表す遠方物画像は雲を表す雲画像であって、
前記遠景画像生成手段は、前記地平線上の遠景を表現する画像として、予め用意した相互に異なる複数の雲画像のうちから、ランダムに雲画像を選択して、選択した雲画像の配置位置を生成しようとする画像領域内にランダムに設定し、設定した配置位置に選択した雲画像を、当該雲画像の配置位置が下方であるほど描画サイズが小さくなるように描画した画像を生成することを特徴とする地図表示装置。
【請求項6】
請求項1、2、3、4または5記載の地図表示装置と、
現在位置及び現在の進行方向を検出する現在状況検出手段とを有し、
前記鳥瞰地図生成手段は、前記現在状況検出手段が検出した現在位置と進行方向とより定まる上方位置より、前記進行方向に向かって斜め下方に地図表示範囲を観測したようすを模擬した地図である鳥瞰地図を生成することを特徴とするナビゲーションシステム。
【請求項7】
地図を表す地図画像を表示する地図表示装置において地図を表示する地図表示方法であって、
上方より斜め下方に地図表示範囲を観測したようすを模擬した、観測の視点からみた方位角度範囲が所定の大きさの地図である鳥瞰地図を生成するステップと、
前記鳥瞰地図の方位角度範囲、または、前記鳥瞰地図の方位角度範囲と当該方位角度範囲周辺の方位角度範囲とを含む範囲を、基準方位角度範囲とし、当該基準方位角度範囲内についての地平線上の遠景を表現する遠景画像を生成するステップと、
前記遠景画像のうちの前記鳥瞰地図の方位角度範囲についての地平線上の遠景を表現する画像部分を、前記鳥瞰地図の上部に配置した地図画像を生成するステップと、
前記鳥瞰地図の方位角度範囲の変化に伴う前記基準方位角度範囲の変化に応答して、当該変化前の遠景画像のうちの前記基準方位角度範囲外となった方位角度範囲についての地平線上の遠景を表現する画像部分を消去すると共に、前記基準方位角度範囲に新たに含まれることとなった方位角度範囲についての地平線上の遠景を表現する画像を生成して、前記遠景画像に含めるステップとを有することを特徴とする地図表示方法。
【請求項8】
請求項7記載の地図表示方法であって、
前記基準方位角度範囲に新たに含まれることとなった方位角度範囲についての地平線上の遠景を表現する画像を生成する際に、当該地平線上の遠景を表現する画像として、当該画像の生成の度にランダム性をもって内容が変化する画像を生成することを特徴とする地図表示装置。
【請求項1】
地図を表す地図画像を表示する地図表示装置であって、
上方より斜め下方に地図表示範囲を観測したようすを模擬した、観測の視点からみた方位角度範囲が所定の大きさの地図である鳥瞰地図を生成する鳥瞰地図生成手段と、
前記鳥瞰地図の方位角度範囲内についての地平線上の遠景を表現する遠景画像を生成する遠景画像生成手段と、
前記鳥瞰地図の上部に前記遠景画像を配置した地図画像を生成する地図画像生成手段とを有し、
前記遠景画像生成手段は、前記鳥瞰地図の方位角度範囲の変化に応答して、当該変化前の遠景画像のうちの前記鳥瞰地図の方位角度範囲外となった方位角度範囲についての地平線上の遠景を表現する画像部分を消去すると共に、前記鳥瞰地図の方位角度範囲に新たに含まれることとなった方位角度範囲についての地平線上の遠景を表現する画像を生成して、前記遠景画像に含めることを特徴とする地図表示装置。
【請求項2】
地図を表す地図画像を表示する地図表示装置であって、
上方より斜め下方に地図表示範囲を観測したようすを模擬した、観測の視点からみた方位角度範囲が所定の大きさの地図である鳥瞰地図を生成する鳥瞰地図生成手段と、
前記鳥瞰地図の方位角度範囲と当該方位角度範囲周辺の方位角度範囲とを含む方位角度範囲である基準方位角度範囲内についての地平線上の遠景を表現する遠景画像を生成する遠景画像生成手段と、
前記遠景画像のうちの前記鳥瞰地図の方位角度範囲についての地平線上の遠景を表現する画像部分を、前記鳥瞰地図の上部に配置した地図画像を生成する地図画像生成手段とを有し、
前記遠景画像生成手段は、前記鳥瞰地図の方位角度範囲の変化に伴う前記基準方位角度範囲の変化に応答して、当該変化前の遠景画像のうちの前記基準方位角度範囲外となった方位角度範囲についての地平線上の遠景を表現する画像部分を消去すると共に、前記基準方位角度範囲に新たに含まれることとなった方位角度範囲についての地平線上の遠景を表現する画像を生成して、前記遠景画像に含めることを特徴とする地図表示装置。
【請求項3】
請求項1または2記載の地図表示装置であって、
前記遠景画像生成手段は、前記地平線上の遠景を表現する画像として、当該画像の生成の度にランダム性をもって内容が変化する画像を生成することを特徴とする地図表示装置。
【請求項4】
請求項1または2記載の地図表示装置であって、
前記遠景画像生成手段は、前記地平線上の遠景を表現する画像として、生成しようとする画像領域内に遠方物を表す遠方物画像をランダムに描画した画像を生成することを特徴とする地図表示装置。
【請求項5】
請求項4記載の地図表示装置であって、
前記遠方物を表す遠方物画像は雲を表す雲画像であって、
前記遠景画像生成手段は、前記地平線上の遠景を表現する画像として、予め用意した相互に異なる複数の雲画像のうちから、ランダムに雲画像を選択して、選択した雲画像の配置位置を生成しようとする画像領域内にランダムに設定し、設定した配置位置に選択した雲画像を、当該雲画像の配置位置が下方であるほど描画サイズが小さくなるように描画した画像を生成することを特徴とする地図表示装置。
【請求項6】
請求項1、2、3、4または5記載の地図表示装置と、
現在位置及び現在の進行方向を検出する現在状況検出手段とを有し、
前記鳥瞰地図生成手段は、前記現在状況検出手段が検出した現在位置と進行方向とより定まる上方位置より、前記進行方向に向かって斜め下方に地図表示範囲を観測したようすを模擬した地図である鳥瞰地図を生成することを特徴とするナビゲーションシステム。
【請求項7】
地図を表す地図画像を表示する地図表示装置において地図を表示する地図表示方法であって、
上方より斜め下方に地図表示範囲を観測したようすを模擬した、観測の視点からみた方位角度範囲が所定の大きさの地図である鳥瞰地図を生成するステップと、
前記鳥瞰地図の方位角度範囲、または、前記鳥瞰地図の方位角度範囲と当該方位角度範囲周辺の方位角度範囲とを含む範囲を、基準方位角度範囲とし、当該基準方位角度範囲内についての地平線上の遠景を表現する遠景画像を生成するステップと、
前記遠景画像のうちの前記鳥瞰地図の方位角度範囲についての地平線上の遠景を表現する画像部分を、前記鳥瞰地図の上部に配置した地図画像を生成するステップと、
前記鳥瞰地図の方位角度範囲の変化に伴う前記基準方位角度範囲の変化に応答して、当該変化前の遠景画像のうちの前記基準方位角度範囲外となった方位角度範囲についての地平線上の遠景を表現する画像部分を消去すると共に、前記基準方位角度範囲に新たに含まれることとなった方位角度範囲についての地平線上の遠景を表現する画像を生成して、前記遠景画像に含めるステップとを有することを特徴とする地図表示方法。
【請求項8】
請求項7記載の地図表示方法であって、
前記基準方位角度範囲に新たに含まれることとなった方位角度範囲についての地平線上の遠景を表現する画像を生成する際に、当該地平線上の遠景を表現する画像として、当該画像の生成の度にランダム性をもって内容が変化する画像を生成することを特徴とする地図表示装置。
【図1】


【図2】
【図4】
【図3】
【図5】
【図6】
【図2】
【図4】
【図3】
【図5】
【図6】
【公開番号】特開2006−17878(P2006−17878A)
【公開日】平成18年1月19日(2006.1.19)
【国際特許分類】
【出願番号】特願2004−193733(P2004−193733)
【出願日】平成16年6月30日(2004.6.30)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成18年1月19日(2006.1.19)
【国際特許分類】
【出願日】平成16年6月30日(2004.6.30)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]