
地図表示装置
【課題】 片側2車線以上の道路において、車両が右・左折するときに、表示装置に表示される3D表示の視点を運転者の視点に極力一致させる。
【解決手段】 本発明の地図表示装置は、表示装置に地図を3D表示することが可能なように構成されたものにおいて、片側2車線以上の道路を走行しているときに、車両の走行車線を特定すると共に、特定された車両の走行中の車線に基づいて3D表示の視点を変えるように構成したものである。
【解決手段】 本発明の地図表示装置は、表示装置に地図を3D表示することが可能なように構成されたものにおいて、片側2車線以上の道路を走行しているときに、車両の走行車線を特定すると共に、特定された車両の走行中の車線に基づいて3D表示の視点を変えるように構成したものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、表示装置に地図を3D表示することが可能なように構成された地図表示装置に関する。
【背景技術】
【0002】
地図を3D表示することが可能な装置である例えばカーナビゲーション装置においては、片側2車線以上の道路であっても、車両の現在位置の検出精度が車線を判別できるほど高くないことから、3D表示の視点を道路の中央部に位置させるように構成されている。
【特許文献1】特開2002−243485号公報
【特許文献2】特開平8−313282号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記従来構成の場合、車両が右折または左折する場合、片側2車線以上の道路においては、車両の位置(運転者の視点の位置)と、3D表示の視点の位置(道路の中央部)とが異なる。このため、車両が右折または左折するときに、運転者が実際に見る周囲風景と、カーナビゲーション装置の表示装置に表示される3D表示とが異なり、運転者に戸惑いを感じさせてしまうという問題点があった。
【0004】
尚、3D表示の視点を変える構成として、特許文献1に記載された構成が知られている。この構成では、運転者がジョイスティック等を操作することにより、3D表示の視点を所望の位置に設定することができる。しかし、手動操作が必要であるから、停車中しか操作できず、上記問題点を解消することはできない。また、特許文献2には、車両の進行方向に基づいて車両の位置が道路の右側であるか左側であるかを判断して表示する構成が記載されている。しかし、この特許文献2の構成では、片側2車線以上の道路において車両の走行車線を判断することはできない。
【0005】
そこで、本発明の目的は、片側2車線以上の道路において、車両が右・左折するときに、表示装置に表示される3D表示の視点を運転者の視点に極力一致させることができる地図表示装置を提供するにある。
【課題を解決するための手段】
【0006】
本発明の地図表示装置は、表示装置に地図を3D表示することが可能なように構成されたものにおいて、片側2車線以上の道路を走行しているときに、車両の走行車線を特定する車線特定手段と、特定された前記車両の走行中の車線に基づいて3D表示の視点を変える表示制御手段とを備えたところに特徴を有する。
【0007】
上記構成によれば、片側2車線以上の道路を走行しているときに、車両の走行車線を特定して、この特定された車両の走行中の車線に基づいて3D表示の視点を変えるように構成したので、車両が右・左折するときに、表示装置に表示される3D表示の視点を運転者の視点に極力一致させることができる。
【0008】
また、上記構成の場合、前記車線特定手段は、前記車両のウインカーの右・左折動作を検出することにより、前記車両の走行車線を特定するように構成されていることが好ましい。更に、前記車線特定手段は、カーナビゲーション装置により経路案内を実行している場合、前記経路案内の右・左折情報に基づいて、前記車両の走行車線を特定するように構成されていることが良い構成である。
【0009】
更にまた、前記車線特定手段は、前記車両の走行車線を検出するためのセンサから出力される検出信号に基づいて、前記車両の走行車線を特定するように構成されていることがより一層好ましい構成である。
【発明を実施するための最良の形態】
【0010】
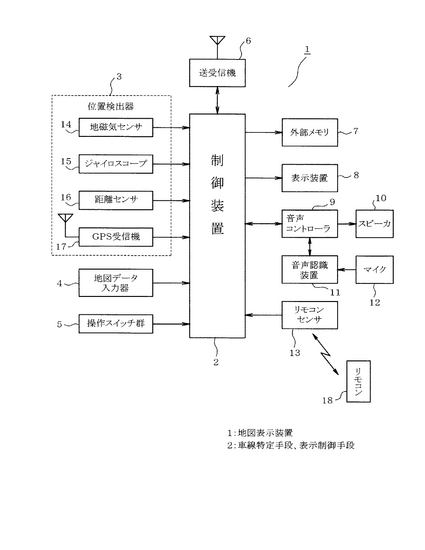
以下、本発明をカーナビゲーション装置に適用した第1の実施例について、図1および図2を参照しながら説明する。まず、図1は、本実施例のカーナビゲーション装置の電気的構成を概略的に示すブロック図である。この図1に示すように、カーナビゲーション装置1は、制御装置2と、位置検出器3と、地図データ入力器4と、操作スイッチ群5と、送受信機6と、外部メモリ7と、表示装置8と、音声コントローラ9と、スピーカ10と、音声認識装置11と、マイク12と、リモコンセンサ13とから構成されている。
【0011】
上記制御装置2は、カーナビゲーション装置1の動作全般を制御する機能を有しており、CPU、ROM、RAM、I/O及びこれらを接続するバス(いずれも図示しない)を備えて構成されている。本実施例の場合、制御装置2が車線特定手段および表示制御手段としての各機能を有している。
【0012】
位置検出器3は、地磁気センサ14と、ジャイロスコープ15と、距離センサ16と、GPS(Global Positioning System )受信機17とから構成されている。位置検出器3は、上記4つのセンサ14〜17により互いに補間しながら車両の現在位置を検出するように構成されており、高精度の位置検出機能を有している。尚、位置検出精度をそれほど必要としない場合には、4つのセンサ14〜17のうちの何れかで(または複数のセンサの組み合わせで)位置検出器3を構成しても良い。また、車両のステアリングの回転センサや、ホイールの車輪センサなどを適宜組み合わせて、位置検出器3を構成しても良い。
【0013】
地図データ入力器4は、CD−ROM、DVD−ROM、HDD、メモリ等の記憶媒体を読み取り可能な読取装置で構成されており、地図データやマップマッチング用データや目印データや音声認識用辞書データ等の各種データを入力するための装置である。操作スイッチ群5は、表示装置8の表示画面の上面に設けられたタッチスイッチ(タッチパネル)と、表示装置8の周辺部に設けられたメカニカルなプッシュスイッチ(図示しない)等とから構成されている。操作スイッチ群5のスイッチ操作により、制御装置2へ各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等)の操作指示が行われる。
【0014】
送受信機6は、例えばVICS通信装置や、携帯電話機(専用の携帯電話端末や汎用の携帯電話機等)などで構成されている。この送受信機6を介して外部(例えばVICSシステムなどのインフラ)から提供される交通情報、気象情報、施設情報、広告情報等を受信し、また外部へ車両情報、ユーザー情報等を送信することができるように構成されている。外部メモリ7は、メモリスティックやメモリカードや磁気テープやHDD等の記憶装置で構成されており、地図データや音楽データや映像データ等を記憶しておくための装置である。
【0015】
表示装置8は、フルカラー表示可能なものであり、例えば液晶ディスプレイや有機EL等で構成されており、地図データ(道路データ、文字データ及び背景データ等)、自車位置マーク、誘導経路等の付加データ等を重ねて表示することが可能なように構成されている。尚、ユーザーは、リモコン18を操作することにより、リモコンセンサ13を介して制御装置2へ種々の操作信号を与えることが可能なように構成されている。
【0016】
また、制御装置2は、現在位置(出発地)から目的地までの最適経路(誘導経路)を自動的に計算して設定する機能(経路計算機能)を備えており、この自動的に最適経路を設定する方法としては、例えばダイクストラ法等を使用している。尚、目的地は、ユーザーが操作スイッチ群5やリモコン18などを操作して設定することが可能なように構成されている。
【0017】
更に、制御装置2は、表示装置8に表示されている地図上に上記目的地までの最適経路(誘導経路)を重ねて表示する機能や、車両の現在位置を上記地図上に位置付けるマップマッチング処理を実行する機能等を備えている。また、制御装置2には、車両に搭載されたオーディオ装置(図示しない)が接続されており、制御装置2によってオーディオ装置をコントロールすることが可能なように構成されている。
【0018】
また、スピーカ10は、音声コントローラ9から入力された音声出力信号に基づき、所定の音声(案内のための音声や画面操作の説明、音声認識結果等)を外部に報知する。マイク12は、運転者等が発生した音声を電気信号として音声認識装置11に入力する。音声認識装置11は、マイク12からの入力音声と、内部に記憶する認識辞書中の語彙データ(比較対照パターン)とを照合し、最も一致度が高いものを認識結果として音声コントローラ9に入力する。
【0019】
音声コントローラ9は、音声認識装置11を制御すると共に、音声入力があった運転者等に対し、スピーカ10を通じてトークバック出力制御(音声出力)する。また、音声認識装置11の認識結果を制御装置2に入力する処理を実行する。制御装置2は、音声認識装置11の認識結果に基づき、各種の処理(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索実行、経路案内開始、現在位置修正、表示画面変更、音量調整等)を実行する。また、制御装置2で処理された経路案内音声情報等は、音声コントローラ9を介してスピーカ10から適宜出力される。
【0020】
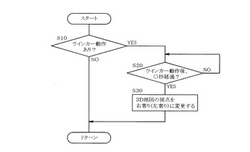
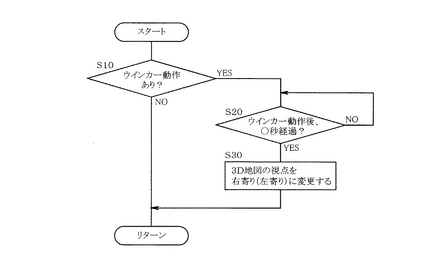
次に、上記構成のカーナビゲーション装置1の作用、特には、車両が右・左折するときに、表示装置8に表示する3D表示の視点を変える制御について、図2のフローチャートを参照して説明する。尚、図2のフローチャートは、制御装置2の制御のうちの上記3D表示の視点を変える制御部部の内容を示している。
【0021】
上記制御においては、まず、ステップS10において、車両のウインカーが操作(動作)されたか否かを判断する。この場合、制御装置2は、車両のウインカーの右・左折動作を検出することが可能なように構成されている。そして、ウインカーの動作がない場合には、ステップS10にて「NO」へ進み、何もしないで、メインルーチンへ戻る。
【0022】
これに対し、ウインカーの動作がある場合には、ステップS10にて「YES」へ進み、ステップS20へ進み、ウインカー動作後、所定時間(例えば数秒)が経過したか否かを判断する。この場合、所定時間としては、車線変更も考慮に入れて、ウインカー動作後、車線変更完了後を想定した秒数を設定しておく。尚、上記所定時間を、ユーザーにより指定(設定)可能なように構成しても良い。そして、上記ステップS20において、所定時間が経過していないときには、「NO」へ進み、所定時間が経過するのを待つ。
【0023】
これに対し、所定時間が経過したら、ステップS20において、「YES」へ進み、ステップS30へ進み、表示装置8に3D表示されている地図の3D表示の視点を右寄り(ウインカー右折動作時)または左寄り(ウインカー左折動作時)に変更する処理を行う。この場合、3D表示の視点を右寄りまたは左寄りに変更するに際しては、具体的には、次のようにする。車両が走行中の道路の幅寸法を、1車線の幅寸法(平均値)で割り算することで、おおよその車線数を算出する。この算出した車線数から、片側2車線以上あるときには、右寄りに変更する場合、片側の複数車線のうちの最も右の車線に車両が位置するように、3D表示の視点の位置を変更する。また、左寄りに変更する場合、片側の複数車線のうちの最も左の車線に車両が位置するように、3D表示の視点の位置を変更する。
【0024】
このような構成の本実施例によれば、片側2車線以上の道路を走行しているときに、車両の走行車線を特定し、この特定された車両の走行中の車線に基づいて3D表示の視点を変更するように構成したので、片側2車線以上の道路において、車両が右・左折するときに、表示装置に表示される3D表示の視点を運転者の視点に極力一致させることができる。このため、運転者が実際に見る周囲風景と、表示装置に表示される3D表示とが極力一致するようになり、運転者に戸惑いを感じさせないようにし得る。
【0025】
また、上記実施例においては、車両の走行車線を特定するに際して、車両のウインカーの右・左折動作を検出することにより、走行車線を特定するように構成したので、簡単な構成にて容易に走行車線を特定することができる。
【0026】
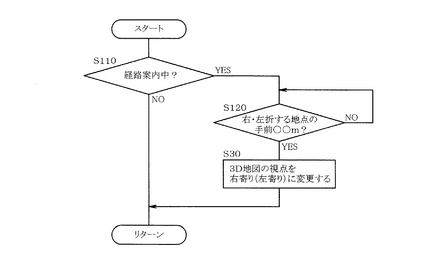
図3は、本発明の第2の実施例を示すものである。尚、上記第1の実施例と同一構成(処理ステップ)には、同一符号(ステップ番号)を付している。上記第2の実施例では、カーナビゲーション装置1(の制御装置2)により経路案内を実行している場合に、経路案内の右・左折情報に基づいて、車両の走行車線を特定するように構成されている。
【0027】
具体的には、まず、ステップS110において、カーナビゲーション装置1の制御装置2により経路案内が実行中であるか否かを判断する。ここで、経路案内が実行中でない場合には、ステップS110にて「NO」へ進み、何もしないで、メインルーチンへ戻る。
【0028】
これに対して、経路案内が実行中である場合には、ステップS110にて「YES」へ進み、ステップS120へ進み、右・左折する地点(交差点)の手前所定距離(例えば数十m)の地点に到達したか否かを判断する。この場合、所定距離としては、車線変更完了後を想定した距離を設定しておく。尚、上記所定距離を、ユーザーにより指定(設定)可能なように構成しても良い。そして、上記ステップS120において、右・左折する地点の手前所定距離の地点に到達していないときには、「NO」へ進み、到達するのを待つ。
【0029】
これに対し、右・左折する地点の手前所定距離の地点に到達したら、ステップS120において、「YES」へ進み、ステップS30へ進み、表示装置8に3D表示されている地図の3D表示の視点を右寄り(右折時)または左寄り(左折時)に変更する処理を、前述したようにして実行する。
【0030】
そして、上述した以外の第2の実施例の構成は、第1の実施例の構成と同じ構成となっている。従って、上記第2の実施例においても、第1の実施例とほぼ同じ作用効果を得ることができる。特に、第2の実施例では、車両の走行車線を特定するに際して、カーナビゲーション装置1により経路案内を実行しているときに、その経路案内の右・左折情報に基づいて車線を特定するように構成したので、車線を特定する構成を、簡単な構成にて容易に実現することができる。
【0031】
また、車両が走行している車線を特定する構成として、車両の走行車線を検出するためのセンサから出力される検出信号に基づいて、車両の走行車線を特定するように構成しても良い。ここで、車両の走行車線を検出するための複数のセンサの一例と、これらセンサから出力される検出信号に基づいて車両の走行車線を特定する制御の内容の一例が、本出願人が既に出願した特願2004−180602に記載されている。そこで、この特願2004−180602に記載されている構成(車両の走行車線認識装置)を、本発明に適用して、車両の走行車線を特定するように構成することが好ましい。
【0032】
そして、車両の走行車線を特定した後は、表示装置8に3D表示されている地図の3D表示の視点の位置を、上記特定された車両の走行中の車線に位置させるように変更すれば良い。尚、走行中の道路の車線数は、前記ステップS30の処理で説明した方法で計算するように構成しても良い。また、上記特願2004−180602に記載されている方法で車線数を取得(地図データから取得)しても良い。
【図面の簡単な説明】
【0033】
【図1】本発明の第1の実施例を示すカーナビゲーション装置のブロック図
【図2】フローチャート
【図3】本発明の第2の実施例を示す図2相当図
【符号の説明】
【0034】
図面中、1はカーナビゲーション装置(地図表示装置)、2は制御装置(車線特定手段、表示制御手段)、3は位置検出器、4は地図データ入力器、5は操作スイッチ群、8は表示装置、9は音声コントローラ、10はスピーカ、13はリモコンセンサ、18はリモコンを示す。
【技術分野】
【0001】
本発明は、表示装置に地図を3D表示することが可能なように構成された地図表示装置に関する。
【背景技術】
【0002】
地図を3D表示することが可能な装置である例えばカーナビゲーション装置においては、片側2車線以上の道路であっても、車両の現在位置の検出精度が車線を判別できるほど高くないことから、3D表示の視点を道路の中央部に位置させるように構成されている。
【特許文献1】特開2002−243485号公報
【特許文献2】特開平8−313282号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記従来構成の場合、車両が右折または左折する場合、片側2車線以上の道路においては、車両の位置(運転者の視点の位置)と、3D表示の視点の位置(道路の中央部)とが異なる。このため、車両が右折または左折するときに、運転者が実際に見る周囲風景と、カーナビゲーション装置の表示装置に表示される3D表示とが異なり、運転者に戸惑いを感じさせてしまうという問題点があった。
【0004】
尚、3D表示の視点を変える構成として、特許文献1に記載された構成が知られている。この構成では、運転者がジョイスティック等を操作することにより、3D表示の視点を所望の位置に設定することができる。しかし、手動操作が必要であるから、停車中しか操作できず、上記問題点を解消することはできない。また、特許文献2には、車両の進行方向に基づいて車両の位置が道路の右側であるか左側であるかを判断して表示する構成が記載されている。しかし、この特許文献2の構成では、片側2車線以上の道路において車両の走行車線を判断することはできない。
【0005】
そこで、本発明の目的は、片側2車線以上の道路において、車両が右・左折するときに、表示装置に表示される3D表示の視点を運転者の視点に極力一致させることができる地図表示装置を提供するにある。
【課題を解決するための手段】
【0006】
本発明の地図表示装置は、表示装置に地図を3D表示することが可能なように構成されたものにおいて、片側2車線以上の道路を走行しているときに、車両の走行車線を特定する車線特定手段と、特定された前記車両の走行中の車線に基づいて3D表示の視点を変える表示制御手段とを備えたところに特徴を有する。
【0007】
上記構成によれば、片側2車線以上の道路を走行しているときに、車両の走行車線を特定して、この特定された車両の走行中の車線に基づいて3D表示の視点を変えるように構成したので、車両が右・左折するときに、表示装置に表示される3D表示の視点を運転者の視点に極力一致させることができる。
【0008】
また、上記構成の場合、前記車線特定手段は、前記車両のウインカーの右・左折動作を検出することにより、前記車両の走行車線を特定するように構成されていることが好ましい。更に、前記車線特定手段は、カーナビゲーション装置により経路案内を実行している場合、前記経路案内の右・左折情報に基づいて、前記車両の走行車線を特定するように構成されていることが良い構成である。
【0009】
更にまた、前記車線特定手段は、前記車両の走行車線を検出するためのセンサから出力される検出信号に基づいて、前記車両の走行車線を特定するように構成されていることがより一層好ましい構成である。
【発明を実施するための最良の形態】
【0010】
以下、本発明をカーナビゲーション装置に適用した第1の実施例について、図1および図2を参照しながら説明する。まず、図1は、本実施例のカーナビゲーション装置の電気的構成を概略的に示すブロック図である。この図1に示すように、カーナビゲーション装置1は、制御装置2と、位置検出器3と、地図データ入力器4と、操作スイッチ群5と、送受信機6と、外部メモリ7と、表示装置8と、音声コントローラ9と、スピーカ10と、音声認識装置11と、マイク12と、リモコンセンサ13とから構成されている。
【0011】
上記制御装置2は、カーナビゲーション装置1の動作全般を制御する機能を有しており、CPU、ROM、RAM、I/O及びこれらを接続するバス(いずれも図示しない)を備えて構成されている。本実施例の場合、制御装置2が車線特定手段および表示制御手段としての各機能を有している。
【0012】
位置検出器3は、地磁気センサ14と、ジャイロスコープ15と、距離センサ16と、GPS(Global Positioning System )受信機17とから構成されている。位置検出器3は、上記4つのセンサ14〜17により互いに補間しながら車両の現在位置を検出するように構成されており、高精度の位置検出機能を有している。尚、位置検出精度をそれほど必要としない場合には、4つのセンサ14〜17のうちの何れかで(または複数のセンサの組み合わせで)位置検出器3を構成しても良い。また、車両のステアリングの回転センサや、ホイールの車輪センサなどを適宜組み合わせて、位置検出器3を構成しても良い。
【0013】
地図データ入力器4は、CD−ROM、DVD−ROM、HDD、メモリ等の記憶媒体を読み取り可能な読取装置で構成されており、地図データやマップマッチング用データや目印データや音声認識用辞書データ等の各種データを入力するための装置である。操作スイッチ群5は、表示装置8の表示画面の上面に設けられたタッチスイッチ(タッチパネル)と、表示装置8の周辺部に設けられたメカニカルなプッシュスイッチ(図示しない)等とから構成されている。操作スイッチ群5のスイッチ操作により、制御装置2へ各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等)の操作指示が行われる。
【0014】
送受信機6は、例えばVICS通信装置や、携帯電話機(専用の携帯電話端末や汎用の携帯電話機等)などで構成されている。この送受信機6を介して外部(例えばVICSシステムなどのインフラ)から提供される交通情報、気象情報、施設情報、広告情報等を受信し、また外部へ車両情報、ユーザー情報等を送信することができるように構成されている。外部メモリ7は、メモリスティックやメモリカードや磁気テープやHDD等の記憶装置で構成されており、地図データや音楽データや映像データ等を記憶しておくための装置である。
【0015】
表示装置8は、フルカラー表示可能なものであり、例えば液晶ディスプレイや有機EL等で構成されており、地図データ(道路データ、文字データ及び背景データ等)、自車位置マーク、誘導経路等の付加データ等を重ねて表示することが可能なように構成されている。尚、ユーザーは、リモコン18を操作することにより、リモコンセンサ13を介して制御装置2へ種々の操作信号を与えることが可能なように構成されている。
【0016】
また、制御装置2は、現在位置(出発地)から目的地までの最適経路(誘導経路)を自動的に計算して設定する機能(経路計算機能)を備えており、この自動的に最適経路を設定する方法としては、例えばダイクストラ法等を使用している。尚、目的地は、ユーザーが操作スイッチ群5やリモコン18などを操作して設定することが可能なように構成されている。
【0017】
更に、制御装置2は、表示装置8に表示されている地図上に上記目的地までの最適経路(誘導経路)を重ねて表示する機能や、車両の現在位置を上記地図上に位置付けるマップマッチング処理を実行する機能等を備えている。また、制御装置2には、車両に搭載されたオーディオ装置(図示しない)が接続されており、制御装置2によってオーディオ装置をコントロールすることが可能なように構成されている。
【0018】
また、スピーカ10は、音声コントローラ9から入力された音声出力信号に基づき、所定の音声(案内のための音声や画面操作の説明、音声認識結果等)を外部に報知する。マイク12は、運転者等が発生した音声を電気信号として音声認識装置11に入力する。音声認識装置11は、マイク12からの入力音声と、内部に記憶する認識辞書中の語彙データ(比較対照パターン)とを照合し、最も一致度が高いものを認識結果として音声コントローラ9に入力する。
【0019】
音声コントローラ9は、音声認識装置11を制御すると共に、音声入力があった運転者等に対し、スピーカ10を通じてトークバック出力制御(音声出力)する。また、音声認識装置11の認識結果を制御装置2に入力する処理を実行する。制御装置2は、音声認識装置11の認識結果に基づき、各種の処理(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索実行、経路案内開始、現在位置修正、表示画面変更、音量調整等)を実行する。また、制御装置2で処理された経路案内音声情報等は、音声コントローラ9を介してスピーカ10から適宜出力される。
【0020】
次に、上記構成のカーナビゲーション装置1の作用、特には、車両が右・左折するときに、表示装置8に表示する3D表示の視点を変える制御について、図2のフローチャートを参照して説明する。尚、図2のフローチャートは、制御装置2の制御のうちの上記3D表示の視点を変える制御部部の内容を示している。
【0021】
上記制御においては、まず、ステップS10において、車両のウインカーが操作(動作)されたか否かを判断する。この場合、制御装置2は、車両のウインカーの右・左折動作を検出することが可能なように構成されている。そして、ウインカーの動作がない場合には、ステップS10にて「NO」へ進み、何もしないで、メインルーチンへ戻る。
【0022】
これに対し、ウインカーの動作がある場合には、ステップS10にて「YES」へ進み、ステップS20へ進み、ウインカー動作後、所定時間(例えば数秒)が経過したか否かを判断する。この場合、所定時間としては、車線変更も考慮に入れて、ウインカー動作後、車線変更完了後を想定した秒数を設定しておく。尚、上記所定時間を、ユーザーにより指定(設定)可能なように構成しても良い。そして、上記ステップS20において、所定時間が経過していないときには、「NO」へ進み、所定時間が経過するのを待つ。
【0023】
これに対し、所定時間が経過したら、ステップS20において、「YES」へ進み、ステップS30へ進み、表示装置8に3D表示されている地図の3D表示の視点を右寄り(ウインカー右折動作時)または左寄り(ウインカー左折動作時)に変更する処理を行う。この場合、3D表示の視点を右寄りまたは左寄りに変更するに際しては、具体的には、次のようにする。車両が走行中の道路の幅寸法を、1車線の幅寸法(平均値)で割り算することで、おおよその車線数を算出する。この算出した車線数から、片側2車線以上あるときには、右寄りに変更する場合、片側の複数車線のうちの最も右の車線に車両が位置するように、3D表示の視点の位置を変更する。また、左寄りに変更する場合、片側の複数車線のうちの最も左の車線に車両が位置するように、3D表示の視点の位置を変更する。
【0024】
このような構成の本実施例によれば、片側2車線以上の道路を走行しているときに、車両の走行車線を特定し、この特定された車両の走行中の車線に基づいて3D表示の視点を変更するように構成したので、片側2車線以上の道路において、車両が右・左折するときに、表示装置に表示される3D表示の視点を運転者の視点に極力一致させることができる。このため、運転者が実際に見る周囲風景と、表示装置に表示される3D表示とが極力一致するようになり、運転者に戸惑いを感じさせないようにし得る。
【0025】
また、上記実施例においては、車両の走行車線を特定するに際して、車両のウインカーの右・左折動作を検出することにより、走行車線を特定するように構成したので、簡単な構成にて容易に走行車線を特定することができる。
【0026】
図3は、本発明の第2の実施例を示すものである。尚、上記第1の実施例と同一構成(処理ステップ)には、同一符号(ステップ番号)を付している。上記第2の実施例では、カーナビゲーション装置1(の制御装置2)により経路案内を実行している場合に、経路案内の右・左折情報に基づいて、車両の走行車線を特定するように構成されている。
【0027】
具体的には、まず、ステップS110において、カーナビゲーション装置1の制御装置2により経路案内が実行中であるか否かを判断する。ここで、経路案内が実行中でない場合には、ステップS110にて「NO」へ進み、何もしないで、メインルーチンへ戻る。
【0028】
これに対して、経路案内が実行中である場合には、ステップS110にて「YES」へ進み、ステップS120へ進み、右・左折する地点(交差点)の手前所定距離(例えば数十m)の地点に到達したか否かを判断する。この場合、所定距離としては、車線変更完了後を想定した距離を設定しておく。尚、上記所定距離を、ユーザーにより指定(設定)可能なように構成しても良い。そして、上記ステップS120において、右・左折する地点の手前所定距離の地点に到達していないときには、「NO」へ進み、到達するのを待つ。
【0029】
これに対し、右・左折する地点の手前所定距離の地点に到達したら、ステップS120において、「YES」へ進み、ステップS30へ進み、表示装置8に3D表示されている地図の3D表示の視点を右寄り(右折時)または左寄り(左折時)に変更する処理を、前述したようにして実行する。
【0030】
そして、上述した以外の第2の実施例の構成は、第1の実施例の構成と同じ構成となっている。従って、上記第2の実施例においても、第1の実施例とほぼ同じ作用効果を得ることができる。特に、第2の実施例では、車両の走行車線を特定するに際して、カーナビゲーション装置1により経路案内を実行しているときに、その経路案内の右・左折情報に基づいて車線を特定するように構成したので、車線を特定する構成を、簡単な構成にて容易に実現することができる。
【0031】
また、車両が走行している車線を特定する構成として、車両の走行車線を検出するためのセンサから出力される検出信号に基づいて、車両の走行車線を特定するように構成しても良い。ここで、車両の走行車線を検出するための複数のセンサの一例と、これらセンサから出力される検出信号に基づいて車両の走行車線を特定する制御の内容の一例が、本出願人が既に出願した特願2004−180602に記載されている。そこで、この特願2004−180602に記載されている構成(車両の走行車線認識装置)を、本発明に適用して、車両の走行車線を特定するように構成することが好ましい。
【0032】
そして、車両の走行車線を特定した後は、表示装置8に3D表示されている地図の3D表示の視点の位置を、上記特定された車両の走行中の車線に位置させるように変更すれば良い。尚、走行中の道路の車線数は、前記ステップS30の処理で説明した方法で計算するように構成しても良い。また、上記特願2004−180602に記載されている方法で車線数を取得(地図データから取得)しても良い。
【図面の簡単な説明】
【0033】
【図1】本発明の第1の実施例を示すカーナビゲーション装置のブロック図
【図2】フローチャート
【図3】本発明の第2の実施例を示す図2相当図
【符号の説明】
【0034】
図面中、1はカーナビゲーション装置(地図表示装置)、2は制御装置(車線特定手段、表示制御手段)、3は位置検出器、4は地図データ入力器、5は操作スイッチ群、8は表示装置、9は音声コントローラ、10はスピーカ、13はリモコンセンサ、18はリモコンを示す。
【特許請求の範囲】
【請求項1】
表示装置に地図を3D表示することが可能なように構成された地図表示装置において、
片側2車線以上の道路を走行しているときに、車両の走行車線を特定する車線特定手段と、
特定された前記車両の走行中の車線に基づいて3D表示の視点を変える表示制御手段とを備えたことを特徴とする地図表示装置。
【請求項2】
前記車線特定手段は、前記車両のウインカーの右・左折動作を検出することにより、前記車両の走行車線を特定するように構成されていることを特徴とする請求項1記載の地図表示装置。
【請求項3】
前記車線特定手段は、カーナビゲーション装置により経路案内を実行している場合、前記経路案内の右・左折情報に基づいて、前記車両の走行車線を特定するように構成されていることを特徴とする請求項1記載の地図表示装置。
【請求項4】
前記車線特定手段は、前記車両の走行車線を検出するためのセンサから出力される検出信号に基づいて、前記車両の走行車線を特定するように構成されていることを特徴とする請求項1記載の地図表示装置。
【請求項1】
表示装置に地図を3D表示することが可能なように構成された地図表示装置において、
片側2車線以上の道路を走行しているときに、車両の走行車線を特定する車線特定手段と、
特定された前記車両の走行中の車線に基づいて3D表示の視点を変える表示制御手段とを備えたことを特徴とする地図表示装置。
【請求項2】
前記車線特定手段は、前記車両のウインカーの右・左折動作を検出することにより、前記車両の走行車線を特定するように構成されていることを特徴とする請求項1記載の地図表示装置。
【請求項3】
前記車線特定手段は、カーナビゲーション装置により経路案内を実行している場合、前記経路案内の右・左折情報に基づいて、前記車両の走行車線を特定するように構成されていることを特徴とする請求項1記載の地図表示装置。
【請求項4】
前記車線特定手段は、前記車両の走行車線を検出するためのセンサから出力される検出信号に基づいて、前記車両の走行車線を特定するように構成されていることを特徴とする請求項1記載の地図表示装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2006−343480(P2006−343480A)
【公開日】平成18年12月21日(2006.12.21)
【国際特許分類】
【出願番号】特願2005−168191(P2005−168191)
【出願日】平成17年6月8日(2005.6.8)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年12月21日(2006.12.21)
【国際特許分類】
【出願日】平成17年6月8日(2005.6.8)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]