
地図表示装置
【課題】ユーザが目的地の候補地までの所要時間を直感的に認識できる地図表示を行う。
【解決手段】本発明の地図表示装置では、出発地Oと目的地の候補地である地点A〜Fが選択されたら、出発地Oから目的地の候補地である地点A〜Fまでの移動に要する所要時間や、地点A〜Fのうちの二つの地点の間の移動に要する所要時間などを算出する。そして、出発地と地点A〜Fとの間の長さや、地点A〜Fのうちの二つの地点の間の長さなどが、それぞれの間の移動に要する所要時間に応じた長さになるように地点A〜Fの表示位置を決定し、その表示位置に基づいて線分LA〜LF、線分LAB、LBC、LCD、LDE、およびLEFのような線分を表示する。
【解決手段】本発明の地図表示装置では、出発地Oと目的地の候補地である地点A〜Fが選択されたら、出発地Oから目的地の候補地である地点A〜Fまでの移動に要する所要時間や、地点A〜Fのうちの二つの地点の間の移動に要する所要時間などを算出する。そして、出発地と地点A〜Fとの間の長さや、地点A〜Fのうちの二つの地点の間の長さなどが、それぞれの間の移動に要する所要時間に応じた長さになるように地点A〜Fの表示位置を決定し、その表示位置に基づいて線分LA〜LF、線分LAB、LBC、LCD、LDE、およびLEFのような線分を表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地図表示装置に関する。
【背景技術】
【0002】
従来、各地点間の距離に基づいた道路地図を表示するナビゲーション装置などが知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−259087号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ユーザが地図を見て行き先を決定するとき、行き先までの距離というよりはむしろ所要時間を知りたいことが多い。なぜなら、行き先に到着するまでの所要時間は、通行する道路の種別や渋滞等の状況によって変化するため、距離だけではわからないためである。ユーザは、ナビゲーション装置を利用して経路案内を行うとき、道路地図を表示しながら経路案内の目的地を選択することがある。しかし、ナビゲーション装置などで従来使用されている地図の表示方法では、ユーザは目的地までの所要時間を直感的に判断できなかった。
【課題を解決するための手段】
【0005】
本発明は、道路地図を含む地図を表示し、地図上に出発地の位置と1以上の目的地の候補地の位置とを表示する地図表示装置であって、道路地図の情報に関する情報を少なくとも含む地図データを記憶する地図データ記憶手段と、出発地を選択する出発地選択手段と、候補地を選択する候補地選択手段と、出発地選択手段により選択された出発地から候補地選択手段により選択された各候補地までの移動に必要とする所要時間をそれぞれ算出する所要時間算出手段と、所要時間算出手段により各候補地について算出された所要時間に基づいた長さだけ出発地の表示位置から離れた位置に各候補地の表示位置を決定し、出発地と各候補地の表示位置との間に線分を表示する時間地図表示手段とを備えることを特徴とする。
【発明の効果】
【0006】
各地点間の所要時間に基づいた地図表示を行い、ユーザに目的地の候補地までの所要時間を直感的に認識させることができる。
【図面の簡単な説明】
【0007】
【図1】本発明の地図表示装置の実施例であるナビゲーション装置の構成の一例を示す図である。
【図2】従来の道路地図の表示方法の一例を示す図である。
【図3】所要時間を基準とした地図表示方法の一例を示す図である。
【図4】所要時間を基準とした地図表示方法の例外処理について説明するための図である。
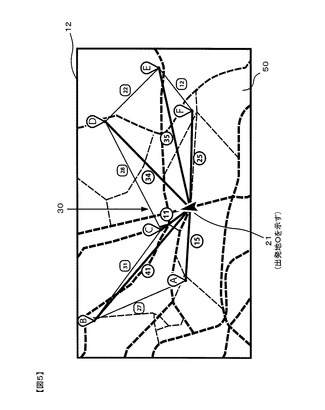
【図5】所要時間を基準とした地図表示と、変形した道路地図とを表示する地図表示方法の一例を示す図である。
【図6】本発明の一実施形態の地図表示装置において、適切な地図表示方法を選択する処理を示すフローチャートの一例である。
【図7】本発明の一実施形態の地図表示装置において、所要時間を基準とした地図を生成する処理を示すフローチャートの一例である。
【図8】所要時間を基準とした地図を生成する処理において、目的地の候補地の対を決定する方法を説明するための図である。
【発明を実施するための形態】
【0008】
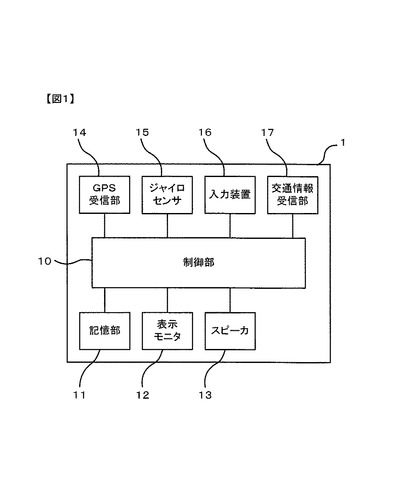
本発明の一実施形態である地図表示装置の構成例について、図1を用いて説明する。図1は、地図表示装置の一実施例としてナビゲーション装置1の構成を示している。図1のナビゲーション装置1は、制御部10、記憶部11、表示モニタ12、スピーカ13、GPS受信部14、ジャイロセンサ15、入力装置16、および交通情報受信部17を備える。
【0009】
図1の制御部10は、ナビゲーション装置1を動作させるための各種処理を実行するための部分であり、マイクロプロセッサ、各種周辺回路、RAM、ROMなどによって構成される。制御部10により実行される処理には、たとえば経路探索処理や、施設検索処理などがある。これらの処理については、多くの手法が公知となっている。
【0010】
制御部10が実行する経路探索処理とは、ユーザが設定した探索条件に基づいて、出発地または車両の現在位置から目的地までの推奨経路を探索するものである。ナビゲーション装置1は、制御部10が推奨経路を探索することにより、目的地までの所要時間を算出することができる。目的地までの所要時間は、記憶部11に記憶されている地図データや、交通情報受信部17から受信する交通情報などに基づいて算出される。
【0011】
推奨経路の探索において、推奨経路の出発地や目的地は、ナビゲーション装置1のユーザが入力装置16を介して入力すればよい。車両の現在位置は、制御部10がGPS受信部14を利用して算出することにより特定できる。経路の探索は、記憶部11に記憶されている地図データに基づいて実行される。なお、推奨経路を探索するとき、目的地だけでなく経由地を選択することとしてもよい。
【0012】
制御部10が実行する施設検索処理とは、施設のジャンルやキーワードに基づいて、記憶部11に記憶されている施設データの中から、車両の現在位置または推奨経路の周辺にある施設を検索するものである。施設の検索に利用する施設のジャンルやキーワードは、ナビゲーション装置1のユーザが入力装置16を介して入力することができる。施設のジャンルとは、施設をその用途などで分類したもので、たとえば「交通機関」、「公共施設」、「医療」などでよい。
【0013】
制御部10が実行する経路誘導処理とは、経路探索処理により探索された推奨経路に沿って運転手が車両を運転できるように、表示モニタ12やスピーカ13などを利用して運転手に案内を行い、車両を誘導するものである。制御部10は、表示モニタ12に車両の位置を示す印を付した地図を表示し、スピーカ13から音声案内を出力する。
【0014】
図1の記憶部11は、ハードディスクなどの不揮発性の記憶媒体であり、地図データや画像データ、音声データを含む各種データが記憶されている。記憶部11に記憶されているデータは、必要に応じて制御部10により記憶部11から読み出され、制御部10が実行する様々な処理や制御に利用される。また、制御部10は、記憶部11に新たなデータを記憶することや既に記憶されているデータを更新することができる。
【0015】
記憶部11に記憶される地図データは、表示モニタ12に道路地図などを表示するためのデータである。地図データには、地図上の場所を表すノードに関する情報と、ノードが表す場所と場所の間を繋ぐ道路を表すリンクに関する情報とが含まれる。ノードに関する情報には、位置情報や地点名称に関する情報などが含まれる。リンクに関する情報には、リンクが表す道路を通過するのにかかる時間を割り出すための情報や、道路種別、車両の通行が許可されている方向などの情報が含まれる。これらの情報に基づいて経路探索処理などが実行される。
【0016】
記憶部11に記憶されている地図データには、施設データが含まれる。施設データには、施設名や施設の位置、施設のジャンルなどの情報が含まれる。制御部10は、施設データを利用して前述した施設検索処理を実行することができる。
【0017】
図1の表示モニタ12は、様々な画像や映像などを表示するための装置であり、液晶ディスプレイ等が用いられる。制御部10の制御に基づいて表示モニタ12に地図や車両の位置を表示することにより、ナビゲーション装置1は車両を誘導することができる。
【0018】
図1のスピーカ13は、制御部10の制御により、車両の走行に関する様々な音声情報を出力する。たとえば、制御部10により探索された経路に従って車両を目的地まで案内するための案内用の音声や、警告音などを出力する。
【0019】
図1のGPS受信部14は、GPS衛星から送信されるGPS信号を受信して制御部10へ出力する。GPS信号には、車両の現在位置と現在時刻を特定するための情報として、そのGPS信号を送信したGPS衛星の位置と送信時刻が含まれている。したがって、制御部10は、所定数以上のGPS衛星からのGPS信号により、これらの情報に基づいて車両の現在位置および現在時刻を算出することができる。制御部10は、GPS信号に基づいて算出された車両の現在位置の時間変化を算出し、その車両の現在位置の時間変化に基づいて、車両が走行している方向と走行した距離を特定することができる。
【0020】
図1のジャイロセンサ15は、車両の向きの変化に応じた角速度を検出するためのセンサである。このジャイロセンサ15により検出された角速度に基づいて、車両の向きが求められ、車両が走行している方向を特定できる。
【0021】
図1の入力装置16は、ナビゲーション装置1を動作させるためにユーザから入力される各種操作を検出するための装置であり、各種の入力スイッチ類を有している。ユーザは、入力装置16を操作することにより、たとえば、目的地に設定したい施設や地名等を入力したり、予め登録された登録地の中から目的地を選択したり、表示モニタ12に表示された地図を任意の方向にスクロールしたりすることができる。入力装置16は、操作パネルやリモコンなどによって実現することができる。あるいは、入力装置16を表示モニタ12と一体化されたタッチパネルとしてもよい。
【0022】
図1の交通情報受信部17は、FM放送やテレマティクスなどにより送信される交通情報を伴うデータ信号や、図示しないVICS(登録商標)情報センタなどから送信される渋滞情報などのVICS情報などを受信し、制御部10に出力するものである。VICS情報は、主に高速道路上に設置されている電波ビーコンや、主に一般道路上に設置されている光ビーコン、またはFM多重放送によって送信される。ナビゲーション装置1は、交通情報受信部17で受信したVICS情報などから道路交通情報を取得し、経路探索処理などに利用する。
【0023】
次に、本発明の一実施形態において、表示モニタ12に表示する地図について図2および図3を用いて説明する。図2は、従来利用されている距離を基準とした地図の表示の一例である。一方、図3は本発明に係わる所要時間を基準とした地図を表示した一例である。以降、距離を基準とした地図のことを距離基準地図と記載し、所要時間を基準とした地図のことを時間基準地図と記載する。
【0024】
図2および図3では、予め地点A〜Fがナビゲーションの目的地の候補地等として選択されており、地点A〜Fの位置を示す印を距離基準地図や時間基準地図などに重ねて表示する。地点A〜Fは、たとえば施設データに含まれる施設などである。
【0025】
図2は、距離基準地図20を表示モニタ12に表示した例である。距離基準地図20は、記憶部11に記憶されている地図データに基づいて表示される道路地図である。図2では、表示モニタ12上に距離基準地図20と共に、予め設定された出発地Oの位置を示す印21および地点A〜Fの位置を示す印22A〜22Fを表示している。印22A〜22Fは、施設データに含まれる施設の位置に関する情報などに基づいた位置に表示される。
【0026】
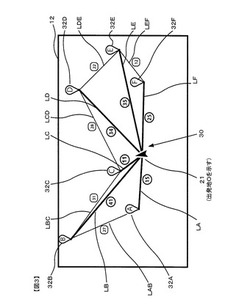
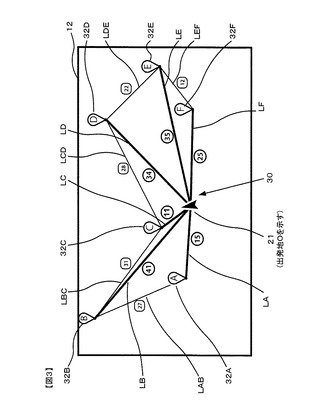
図3は、時間基準地図30を表示モニタ12に表示した例である。図3では、時間基準地図30と共に、予め設定された出発地Oを示す印21と、時間基準地図30において地点A〜Fを示す印32A〜32Fとを表示している。図3の時間基準地図30は、印21から地点A〜Fへそれぞれ延びる線分LA〜LF、ならびに地点A〜Fのうちの二つの地点間の線分LAB、LBC、LCD、LDE、およびLEFとからなる。時間基準地図30では、各線分の長さと方向を以下のように決定することにより、地点A〜Fの表示位置を決定している。
【0027】
線分LA〜LFは出発地Oから地点A〜Fまでの経路に対応し、各線分の長さは出発地Oから地点A〜Fまでの移動の所要時間にそれぞれ対応している。各線分の長さは、たとえば所要時間に基づいた所定の関数で算出すればよい。所定の関数は、たとえば一次関数などでよい。
【0028】
地点Aと地点Bとの間にある線分LABは、地点Aから地点Bまでの経路に対応しており、線分LABの長さは地点Aと地点Bとの間の移動の所要時間に対応している。この所要時間は、地点Aから地点Bまでの所要時間でも、地点Bから地点Aまでの所要時間でもよく、それらの平均値でもよい。また、地点Aと地点Bのうち、出発地からの所要時間がより小さい方から出発した所要時間としてもよい。
【0029】
同様に線分LBCは、地点Bから地点Cまでの経路に対応しており、線分LBCの長さは地点Bと地点Cとの間の移動の所要時間に対応している。線分LCDは、地点Cから地点Dまでの経路に対応しており、線分LCDの長さは地点Cと地点Dとの間の移動の所要時間に対応している。線分LDEは、地点Dから地点Eまでの経路に対応しており、線分LDEの長さは地点Dと地点Eとの間の移動の所要時間に対応している。線分LEFは、地点Eから地点Fまでの経路に対応しており、線分LEFの長さは地点Eと地点Fとの間の移動の所要時間に対応している。
【0030】
図3の時間基準地図30では、線分LA〜LFの長さが表す所要時間を丸付き数字で表示している。また、線分LAB、LBC、LCD、LDE、およびLEFの長さが表す所要時間を、線分LA〜LFとは異なる態様で表示している。
【0031】
各線分の方向は、たとえば線分LA〜LFや、線分LAB、LBC、LCD、LDE、およびLEFなどを辺とした三角形が構成できるような方向に決定する。たとえば、図3では、線分LA、LB、およびLABを3辺とする三角形OABと、LB、LC、およびLBCを3辺とする三角形OBCと、LC、LD、およびLCDを3辺とする三角形OCDと、LD、LE、およびLDEを3辺とする三角形ODEと、ならびにLE、LF、およびLEFを3辺とする三角形OEFという五つの三角形が成立するようにLA〜LFの延在する方向が決められている。このような各三角形の頂点に対応する地点のうち出発地Oを除いた2地点(たとえば、三角形OABでは地点Aと地点B)の組合せを方向決定地点対と以降では記載する。
【0032】
五つの三角形は、各辺の長さが決められているため、その形状は一意に決められる。また、三角形の向きは、たとえば時間基準地図30を構成する線分LA等のうちの一つの向きを基準として固定することにより決められる。図3の例では、線分LCの延在する方向を固定しており、その方向は図2において印21から印22Cに向かって延在する方向としている。以降、このように三角形の向きを決定するために固定する方向を固定方向と記載する。
【0033】
上記のように各線分の長さと方向を決定することにより、地点A〜Fの表示位置を決定する。
【0034】
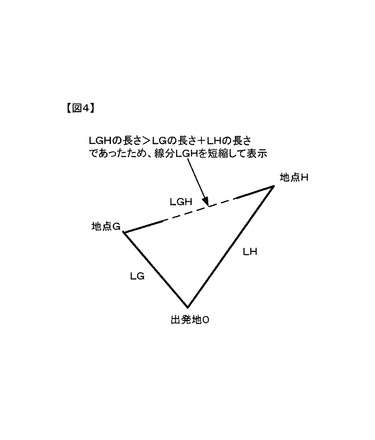
本実施の形態における時間基準地図では、線分LA〜LFの長さはその所要時間に基づいて正確に表示する。一方、線分LABなどのように地点A〜Fのうちの2点の間の線分は、必要に応じて省略してもよいし、下記のようにその一部を短縮した表示を行ってもよい。
【0035】
図4は、三つの線分が三角形の成立条件を満たさない場合に、その一部を短縮して表示した例を示すものである。図4では、三つの線分LG、LH、およびLGHで三角形OGHを構成しようとしている。線分LGは、出発地から地点Gまでの線分である。線分LHは、出発地から地点Hまでの線分である。線分LGHは、地点Gから地点Hまでの線分である。図4の例では、線分LGHの長さが、線分LGの長さと線分LHの長さとの和よりも長かったため三角形の成立条件を満たさなかった。そのため、線分LGHを一部点線で表示することにより、三角形の成立条件を満たす長さまで短縮した表示を行っている。
【0036】
時間基準地図30は、図5のように変形した道路地図50と共に表示モニタ12に表示してもよい。変形した道路地図50は、地点A〜Fの表示位置に基づいて距離基準地図20を変形したものである。図5の例では、地点A〜Fの位置を図2の印22A〜22Fの位置から図3の32A〜32Fの位置にそれぞれ移動させ、地点A〜Fの周囲の道路地図をその移動に合わせて伸縮させている。
【0037】
時間基準地図30のような表示は、ユーザが経路探索の目的地とする地点を選択するときなどに便利である。たとえば、ユーザが目的地とする地点の候補として地点A〜Fを選択した場合に、時間基準地図30を表示することにより、それぞれの地点までの所要時間を直感的に把握することができる。
【0038】
時間基準地図30などに表示する線分は、各種条件に従って線分の色などの表示態様を変更してもよい。たとえば、出発地から延びる線分と、地点間の線分とでは、表示態様を変更してもよい。また、図4のような場合についても表示態様を変更してよい。さらに、所要時間の算出に利用した交通情報の種類や、経路上の渋滞状況などによっても表示態様を変更してもよい。
【0039】
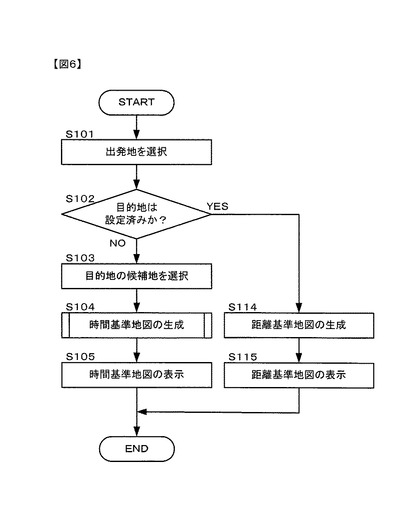
本実施の形態の地図表示装置では、表示モニタ12に表示する地図の形式を、図2の距離基準地図20のような表示と、または図5の時間基準地図30および変形した道路地図50のような表示とのいずれかから選択する。本実施の形態において表示する地図の形式を選択する処理について図6を用いて説明する。図6は、表示モニタ12に表示する地図の形式を選択する処理に関するフローチャートの一例である。図6の処理は、ナビゲーション装置1の制御部10の制御により実行される。
【0040】
図6のステップS101では、制御部10は、所要時間の算出などに用いる出発地を選択する。ステップS101の処理は、たとえば制御部10が入力装置16を制御し、ユーザによる出発地の入力を受け付けることにより実行できる。また、制御部10が車両の現在位置を特定し、特定した車両の現在位置を出発地として選択してもよい。図6の処理は、出発地が選択されたらステップS102に進む。
【0041】
図6のステップS102では、制御部10は、推奨経路の探索などに用いる目的地が図6の処理を開始する以前に予め設定されているか否かを判定する。図6の処理は、目的地が既に設定されている場合はステップS114に進み、そうでない場合はステップS103に進む。
【0042】
図6のステップS103では、制御部10は、入力装置16を制御して目的地の候補地を一つ以上選択する。ステップS103の処理は、たとえば制御部10が入力装置16を制御し、ユーザによる目的地の入力を受け付けることにより実行できる。ユーザは、任意に目的地の候補地を選択してもよいし、ナビゲーション装置1に施設検索処理などを実行させ、その結果を目的地の候補地としてもよい。図6の処理は、目的地の候補地が選択されたらステップS104に進む。
【0043】
図6のステップS104では、制御部10は、図5のような時間基準地図と変形した道路地図とを表示するための情報を生成する。ステップS104で実行される処理のフローチャートについては、図7を用いて後述する。図6の処理は、時間基準地図が生成されたらステップS105に進む。
【0044】
図6のステップS105では、制御部10は、ステップS104で生成した情報に基づいた時間基準地図や、変形した道路地図、出発地や目的地の候補地を示す印などを、図5のように表示モニタ12に表示し、図6の処理を終了する。
【0045】
図6のステップS114では、制御部10は、図2の距離基準地図20のような距離基準地図を生成する。図6の処理は、距離基準地図が生成されたらステップS115に進む。ステップS114で実行される距離基準地図を生成する処理は、たとえば次のようにして行う。制御部10は、記憶部11に記憶されている地図データに基づいて、ステップS103で選択された目的地の候補地の全てまたはその一部を含む地図範囲を決定する。次に制御部10は、その地図範囲を表示モニタ12に表示するための縮尺を決定する。そして、決定した地図範囲の地図を距離基準地図として地図データから抽出する。
【0046】
図6のステップS115では、制御部10は、ステップS114で生成した距離基準地図を、同じくステップS114で決定した縮尺で図2のように表示し、図6の処理を終了する。
【0047】
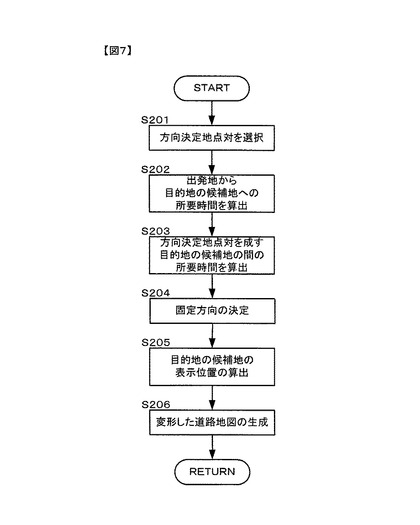
次に、図6のステップS104において実行される時間基準地図を生成する処理について、図7を用いて説明する。図7は、時間基準地図を生成する処理に関するフローチャートである。図7に示す処理は、制御部10により実行され、その処理の開始前に図6のステップS103において目的地の候補地が選択されている。
【0048】
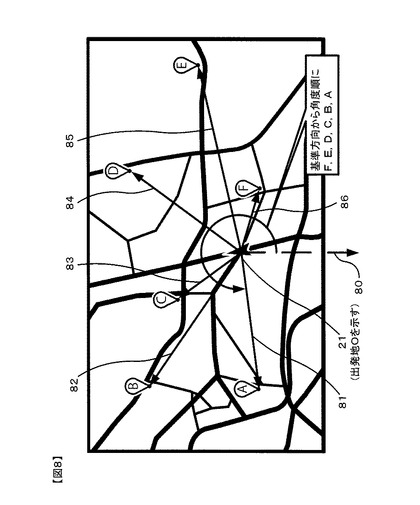
図7のステップS201では、制御部10は、ステップS103で選択された目的地の候補地を組み合わせて方向決定地点対を決定する。方向決定地点対は、たとえば図8を用いて説明される以下のような方法で決定すればよい。
【0049】
図8では、図6のステップS103において、制御部10が目的地の候補地として図2の地点A〜Fを選択したものとする。まず、制御部10は、印21が示す出発地から延びる所定の方向を基準方向80として決定する。次に制御部10は、出発地から目的地の候補地である地点A〜Fに向かう方向81〜86と基準方向80との間の角度を、0〜360°の範囲で算出する。図8の例では、算出した角度が小さい順に目的地の候補地である地点A〜Fを並べると、[F,E,D,C,B,A]という順番になる。制御部10は、この順番[F,E,D,C,B,A]の中で、[FとE]や[EとD]などのように隣り合っている二つの地点を方向決定地点対とする。
【0050】
図7の処理は、図6のステップS103で選択された目的地の候補地について方向決定地点対が決定したら、ステップS201からステップS202に進む。
【0051】
図7のステップS202では、制御部10は、図6のステップS101で選択された出発地から図6のステップS103で選択された目的地の候補地までの所要時間を算出する。出発地から目的地の候補地までの所要時間は、たとえば経路探索処理などを実行することにより算出できる。図7の処理は、出発地から目的地の候補地までの所要時間を算出したらステップS203に進む。
【0052】
図7のステップS203では、制御部10は、ステップS201で決定した方向決定地点対のそれぞれについて、方向決定地点対とした二つの目的地の候補地の間の所要時間を算出する。所要時間の算出方法は、たとえばステップS202と同様に経路探索処理などを実行すればよい。
【0053】
図7の処理は、制御部10が各方向決定地点対について二つの目的地の候補地の間の所要時間を算出したら、ステップS203からステップS204に進む。
【0054】
図7のステップS204では、制御部10は、図3の説明において前述した固定方向を決定する。固定方向は、たとえばステップS201の処理の過程で算出した角度に基づいて決定すればよい。たとえば、出発地から、角度が最小である目的地の候補地を選択し、その候補地に向かう方向(図8の[F,E,D,C,B,A]の場合、出発地から地点Fへ向かう方向)を固定方向としてもよい。また、出発地から、角度の大きさの順番(たとえば[F,E,D,C,B,A])において真ん中にある目的地の候補地(たとえば地点C)を選択し、その候補地へ向かう方向を固定方向としてもよい。あるいは、出発地における車両の向きに最も近い候補地(地点C)を選択し、その候補地へ向かう方向を固定方向としてもよい。
【0055】
図7の処理は、制御部10が固定方向を決定したら、ステップS204からステップS205に進む。
【0056】
図7のステップS205では、制御部10は、ステップS201で決定した方向決定地点対と、ステップS202およびS203で算出した所要時間と、ステップS204で算出した固定方向に基づいて、目的地の候補地の表示位置を算出する。目的地の候補地の表示位置は、たとえば次のような方法で算出する。
【0057】
まず、ステップS202およびS203で算出した所要時間のそれぞれを引数とした所定の関数に基づいて、所要時間を表示モニタ12上の長さに変換する演算を行う。そして、方向決定地点対を成す二つの目的地の候補地について、出発地から各目的地の候補地までの移動に要する所要時間に応じた長さをそれぞれ有する二辺と、二つの目的地の候補地の間の移動に要する所要時間に応じた長さを有する一辺とにより三角形を構成する。次に、ステップS204で決定した固定方向に基づいて当該三角形を配置する方向を決定する。そして、当該三角形を表示モニタ12に配置したときの三角形の各頂点の表示位置を各目的地の候補地の表示位置として算出する。
【0058】
図7の処理は、制御部10が、各目的地の候補地の表示位置を算出したら、ステップS205からステップS206に進む。
【0059】
図7のステップS206では、制御部10は、ステップS205で算出した目的地の候補地の表示位置と記憶部11に記憶した地図データとに基づいて、変形した道路地図を生成する。
【0060】
制御部10は、変形した道路地図の生成が完了したらステップS206の処理を終了する。図7のステップS201〜S206の処理結果は、時間基準地図と変形した道路地図とを表示するための情報として、図6のステップS105以降で利用する。そこで、制御部10は、ステップS201〜S206の処理結果を図7の処理の戻り値として図6の処理に戻り、図6のステップS105に進む。
【0061】
以上で説明した実施形態によれば、次の作用効果を奏する。
【0062】
ユーザに入力装置12を介して出発地と目的地の候補地を選択させ(図6のステップS101とステップS103)、出発地から目的地の候補地までの移動に必要とする所要時間をそれぞれ算出し(図7のステップS202)、その所要時間に基づいて目的地の候補地の表示モニタ12上の表示位置を算出し、出発地から目的地の候補地の表示位置までの間に線分を表示する(図7のステップS205、図6のステップS105)。これにより、ユーザに目的地の候補地までの所要時間を直感的に認識させることができる。
【0063】
さらに、目的地の候補地が二つ以上あるときは、方向決定地点対を成す二つの目的地の候補地間の移動に必要とする所要時間を算出し(図7のステップS203)、その所要時間に基づいて目的地の候補地の表示モニタ12上の表示位置を算出し、二つの目的地の候補地の表示位置の間に線分を表示する(図7のステップS205、図6のステップS105)。これにより、ユーザに目的地の候補地間の移動の所要時間を直感的に認識させることができる。
【0064】
また、目的地の候補地の中から方向決定地点対を選択し(図7のステップS201)、目的地の候補地の中から一つを選択し、固定方向を決定する(図7のステップS204)。そして、方向決定地点対と、固定方向と、各所要時間に基づいて三角形を構成する位置に目的地の候補地の表示位置を決定する(図7のステップS205)。これにより、二つ以上の候補地について見やすい時間基準地図を作成できる。
【0065】
以上で説明した実施形態は、以下のように変形して実施できる。
【0066】
時間基準地図30において、線分LABなどのように地点A〜Fのうちの2点間の線分を省略する場合、線分LA〜LFの延在する方向は、図2の距離基準地図20において印21が示す位置から印22A〜22Fが示す位置に向かう方向と一致させてもよい。
【0067】
図5のような地図表示において、時間基準地図30または変形した道路地図50の表示/非表示を切り換えられるものとしてもよい。
【0068】
図5のような地図表示の代わりに時間基準地図30と距離基準地図20とを表示モニタ12に並べて表示するようにしてもよい。
【0069】
以上で説明した実施の形態では、印21が示す地点を出発地としたが、車両の現在位置としてもよい。この場合、時間地図表示30および変形した道路地図50は、車両の移動に伴って変化していくことが望ましい。
【0070】
以上で説明した実施の形態は、地図表示装置の一例としてナビゲーション装置1をとりあげたが、その内容に限定されるものではない。たとえば、ユーザのパソコンからインターネットを介してサーバへアクセスし、目的地検索が可能な検索システムなどに適用してもよい。
【0071】
以上で説明した実施の形態は、地図表示装置の一例としてジャイロセンサ15などを搭載したナビゲーション装置1をとりあげたが、本発明の地図表示装置は車両用に限定しない。たとえば、ユーザが徒歩などで移動するときに利用する地図表示装置に適用してもよい。さらに、移動手段の種類を選択可能とし、選択した移動手段の種類に応じて時間基準地図における各地点間の線分の長さを決定する所定の関数を決定することで、移動手段の種類ごとに時間基準地図を変化させてもよい。また、利用する移動手段の種類ごとに表示態様を変化させることで、複数の移動手段を利用した経路に関して時間基準地図を表示してもよい。
【0072】
以上で説明した各実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されない。
【符号の説明】
【0073】
1 ナビゲーション装置
10 制御部
11 記憶部
12 表示モニタ
13 スピーカ
14 GPS受信部
15 ジャイロセンサ
16 入力装置
17 交通情報受信部
20 距離基準地図
30 時間基準地図
50 変形した道路地図
【技術分野】
【0001】
本発明は、地図表示装置に関する。
【背景技術】
【0002】
従来、各地点間の距離に基づいた道路地図を表示するナビゲーション装置などが知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−259087号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ユーザが地図を見て行き先を決定するとき、行き先までの距離というよりはむしろ所要時間を知りたいことが多い。なぜなら、行き先に到着するまでの所要時間は、通行する道路の種別や渋滞等の状況によって変化するため、距離だけではわからないためである。ユーザは、ナビゲーション装置を利用して経路案内を行うとき、道路地図を表示しながら経路案内の目的地を選択することがある。しかし、ナビゲーション装置などで従来使用されている地図の表示方法では、ユーザは目的地までの所要時間を直感的に判断できなかった。
【課題を解決するための手段】
【0005】
本発明は、道路地図を含む地図を表示し、地図上に出発地の位置と1以上の目的地の候補地の位置とを表示する地図表示装置であって、道路地図の情報に関する情報を少なくとも含む地図データを記憶する地図データ記憶手段と、出発地を選択する出発地選択手段と、候補地を選択する候補地選択手段と、出発地選択手段により選択された出発地から候補地選択手段により選択された各候補地までの移動に必要とする所要時間をそれぞれ算出する所要時間算出手段と、所要時間算出手段により各候補地について算出された所要時間に基づいた長さだけ出発地の表示位置から離れた位置に各候補地の表示位置を決定し、出発地と各候補地の表示位置との間に線分を表示する時間地図表示手段とを備えることを特徴とする。
【発明の効果】
【0006】
各地点間の所要時間に基づいた地図表示を行い、ユーザに目的地の候補地までの所要時間を直感的に認識させることができる。
【図面の簡単な説明】
【0007】
【図1】本発明の地図表示装置の実施例であるナビゲーション装置の構成の一例を示す図である。
【図2】従来の道路地図の表示方法の一例を示す図である。
【図3】所要時間を基準とした地図表示方法の一例を示す図である。
【図4】所要時間を基準とした地図表示方法の例外処理について説明するための図である。
【図5】所要時間を基準とした地図表示と、変形した道路地図とを表示する地図表示方法の一例を示す図である。
【図6】本発明の一実施形態の地図表示装置において、適切な地図表示方法を選択する処理を示すフローチャートの一例である。
【図7】本発明の一実施形態の地図表示装置において、所要時間を基準とした地図を生成する処理を示すフローチャートの一例である。
【図8】所要時間を基準とした地図を生成する処理において、目的地の候補地の対を決定する方法を説明するための図である。
【発明を実施するための形態】
【0008】
本発明の一実施形態である地図表示装置の構成例について、図1を用いて説明する。図1は、地図表示装置の一実施例としてナビゲーション装置1の構成を示している。図1のナビゲーション装置1は、制御部10、記憶部11、表示モニタ12、スピーカ13、GPS受信部14、ジャイロセンサ15、入力装置16、および交通情報受信部17を備える。
【0009】
図1の制御部10は、ナビゲーション装置1を動作させるための各種処理を実行するための部分であり、マイクロプロセッサ、各種周辺回路、RAM、ROMなどによって構成される。制御部10により実行される処理には、たとえば経路探索処理や、施設検索処理などがある。これらの処理については、多くの手法が公知となっている。
【0010】
制御部10が実行する経路探索処理とは、ユーザが設定した探索条件に基づいて、出発地または車両の現在位置から目的地までの推奨経路を探索するものである。ナビゲーション装置1は、制御部10が推奨経路を探索することにより、目的地までの所要時間を算出することができる。目的地までの所要時間は、記憶部11に記憶されている地図データや、交通情報受信部17から受信する交通情報などに基づいて算出される。
【0011】
推奨経路の探索において、推奨経路の出発地や目的地は、ナビゲーション装置1のユーザが入力装置16を介して入力すればよい。車両の現在位置は、制御部10がGPS受信部14を利用して算出することにより特定できる。経路の探索は、記憶部11に記憶されている地図データに基づいて実行される。なお、推奨経路を探索するとき、目的地だけでなく経由地を選択することとしてもよい。
【0012】
制御部10が実行する施設検索処理とは、施設のジャンルやキーワードに基づいて、記憶部11に記憶されている施設データの中から、車両の現在位置または推奨経路の周辺にある施設を検索するものである。施設の検索に利用する施設のジャンルやキーワードは、ナビゲーション装置1のユーザが入力装置16を介して入力することができる。施設のジャンルとは、施設をその用途などで分類したもので、たとえば「交通機関」、「公共施設」、「医療」などでよい。
【0013】
制御部10が実行する経路誘導処理とは、経路探索処理により探索された推奨経路に沿って運転手が車両を運転できるように、表示モニタ12やスピーカ13などを利用して運転手に案内を行い、車両を誘導するものである。制御部10は、表示モニタ12に車両の位置を示す印を付した地図を表示し、スピーカ13から音声案内を出力する。
【0014】
図1の記憶部11は、ハードディスクなどの不揮発性の記憶媒体であり、地図データや画像データ、音声データを含む各種データが記憶されている。記憶部11に記憶されているデータは、必要に応じて制御部10により記憶部11から読み出され、制御部10が実行する様々な処理や制御に利用される。また、制御部10は、記憶部11に新たなデータを記憶することや既に記憶されているデータを更新することができる。
【0015】
記憶部11に記憶される地図データは、表示モニタ12に道路地図などを表示するためのデータである。地図データには、地図上の場所を表すノードに関する情報と、ノードが表す場所と場所の間を繋ぐ道路を表すリンクに関する情報とが含まれる。ノードに関する情報には、位置情報や地点名称に関する情報などが含まれる。リンクに関する情報には、リンクが表す道路を通過するのにかかる時間を割り出すための情報や、道路種別、車両の通行が許可されている方向などの情報が含まれる。これらの情報に基づいて経路探索処理などが実行される。
【0016】
記憶部11に記憶されている地図データには、施設データが含まれる。施設データには、施設名や施設の位置、施設のジャンルなどの情報が含まれる。制御部10は、施設データを利用して前述した施設検索処理を実行することができる。
【0017】
図1の表示モニタ12は、様々な画像や映像などを表示するための装置であり、液晶ディスプレイ等が用いられる。制御部10の制御に基づいて表示モニタ12に地図や車両の位置を表示することにより、ナビゲーション装置1は車両を誘導することができる。
【0018】
図1のスピーカ13は、制御部10の制御により、車両の走行に関する様々な音声情報を出力する。たとえば、制御部10により探索された経路に従って車両を目的地まで案内するための案内用の音声や、警告音などを出力する。
【0019】
図1のGPS受信部14は、GPS衛星から送信されるGPS信号を受信して制御部10へ出力する。GPS信号には、車両の現在位置と現在時刻を特定するための情報として、そのGPS信号を送信したGPS衛星の位置と送信時刻が含まれている。したがって、制御部10は、所定数以上のGPS衛星からのGPS信号により、これらの情報に基づいて車両の現在位置および現在時刻を算出することができる。制御部10は、GPS信号に基づいて算出された車両の現在位置の時間変化を算出し、その車両の現在位置の時間変化に基づいて、車両が走行している方向と走行した距離を特定することができる。
【0020】
図1のジャイロセンサ15は、車両の向きの変化に応じた角速度を検出するためのセンサである。このジャイロセンサ15により検出された角速度に基づいて、車両の向きが求められ、車両が走行している方向を特定できる。
【0021】
図1の入力装置16は、ナビゲーション装置1を動作させるためにユーザから入力される各種操作を検出するための装置であり、各種の入力スイッチ類を有している。ユーザは、入力装置16を操作することにより、たとえば、目的地に設定したい施設や地名等を入力したり、予め登録された登録地の中から目的地を選択したり、表示モニタ12に表示された地図を任意の方向にスクロールしたりすることができる。入力装置16は、操作パネルやリモコンなどによって実現することができる。あるいは、入力装置16を表示モニタ12と一体化されたタッチパネルとしてもよい。
【0022】
図1の交通情報受信部17は、FM放送やテレマティクスなどにより送信される交通情報を伴うデータ信号や、図示しないVICS(登録商標)情報センタなどから送信される渋滞情報などのVICS情報などを受信し、制御部10に出力するものである。VICS情報は、主に高速道路上に設置されている電波ビーコンや、主に一般道路上に設置されている光ビーコン、またはFM多重放送によって送信される。ナビゲーション装置1は、交通情報受信部17で受信したVICS情報などから道路交通情報を取得し、経路探索処理などに利用する。
【0023】
次に、本発明の一実施形態において、表示モニタ12に表示する地図について図2および図3を用いて説明する。図2は、従来利用されている距離を基準とした地図の表示の一例である。一方、図3は本発明に係わる所要時間を基準とした地図を表示した一例である。以降、距離を基準とした地図のことを距離基準地図と記載し、所要時間を基準とした地図のことを時間基準地図と記載する。
【0024】
図2および図3では、予め地点A〜Fがナビゲーションの目的地の候補地等として選択されており、地点A〜Fの位置を示す印を距離基準地図や時間基準地図などに重ねて表示する。地点A〜Fは、たとえば施設データに含まれる施設などである。
【0025】
図2は、距離基準地図20を表示モニタ12に表示した例である。距離基準地図20は、記憶部11に記憶されている地図データに基づいて表示される道路地図である。図2では、表示モニタ12上に距離基準地図20と共に、予め設定された出発地Oの位置を示す印21および地点A〜Fの位置を示す印22A〜22Fを表示している。印22A〜22Fは、施設データに含まれる施設の位置に関する情報などに基づいた位置に表示される。
【0026】
図3は、時間基準地図30を表示モニタ12に表示した例である。図3では、時間基準地図30と共に、予め設定された出発地Oを示す印21と、時間基準地図30において地点A〜Fを示す印32A〜32Fとを表示している。図3の時間基準地図30は、印21から地点A〜Fへそれぞれ延びる線分LA〜LF、ならびに地点A〜Fのうちの二つの地点間の線分LAB、LBC、LCD、LDE、およびLEFとからなる。時間基準地図30では、各線分の長さと方向を以下のように決定することにより、地点A〜Fの表示位置を決定している。
【0027】
線分LA〜LFは出発地Oから地点A〜Fまでの経路に対応し、各線分の長さは出発地Oから地点A〜Fまでの移動の所要時間にそれぞれ対応している。各線分の長さは、たとえば所要時間に基づいた所定の関数で算出すればよい。所定の関数は、たとえば一次関数などでよい。
【0028】
地点Aと地点Bとの間にある線分LABは、地点Aから地点Bまでの経路に対応しており、線分LABの長さは地点Aと地点Bとの間の移動の所要時間に対応している。この所要時間は、地点Aから地点Bまでの所要時間でも、地点Bから地点Aまでの所要時間でもよく、それらの平均値でもよい。また、地点Aと地点Bのうち、出発地からの所要時間がより小さい方から出発した所要時間としてもよい。
【0029】
同様に線分LBCは、地点Bから地点Cまでの経路に対応しており、線分LBCの長さは地点Bと地点Cとの間の移動の所要時間に対応している。線分LCDは、地点Cから地点Dまでの経路に対応しており、線分LCDの長さは地点Cと地点Dとの間の移動の所要時間に対応している。線分LDEは、地点Dから地点Eまでの経路に対応しており、線分LDEの長さは地点Dと地点Eとの間の移動の所要時間に対応している。線分LEFは、地点Eから地点Fまでの経路に対応しており、線分LEFの長さは地点Eと地点Fとの間の移動の所要時間に対応している。
【0030】
図3の時間基準地図30では、線分LA〜LFの長さが表す所要時間を丸付き数字で表示している。また、線分LAB、LBC、LCD、LDE、およびLEFの長さが表す所要時間を、線分LA〜LFとは異なる態様で表示している。
【0031】
各線分の方向は、たとえば線分LA〜LFや、線分LAB、LBC、LCD、LDE、およびLEFなどを辺とした三角形が構成できるような方向に決定する。たとえば、図3では、線分LA、LB、およびLABを3辺とする三角形OABと、LB、LC、およびLBCを3辺とする三角形OBCと、LC、LD、およびLCDを3辺とする三角形OCDと、LD、LE、およびLDEを3辺とする三角形ODEと、ならびにLE、LF、およびLEFを3辺とする三角形OEFという五つの三角形が成立するようにLA〜LFの延在する方向が決められている。このような各三角形の頂点に対応する地点のうち出発地Oを除いた2地点(たとえば、三角形OABでは地点Aと地点B)の組合せを方向決定地点対と以降では記載する。
【0032】
五つの三角形は、各辺の長さが決められているため、その形状は一意に決められる。また、三角形の向きは、たとえば時間基準地図30を構成する線分LA等のうちの一つの向きを基準として固定することにより決められる。図3の例では、線分LCの延在する方向を固定しており、その方向は図2において印21から印22Cに向かって延在する方向としている。以降、このように三角形の向きを決定するために固定する方向を固定方向と記載する。
【0033】
上記のように各線分の長さと方向を決定することにより、地点A〜Fの表示位置を決定する。
【0034】
本実施の形態における時間基準地図では、線分LA〜LFの長さはその所要時間に基づいて正確に表示する。一方、線分LABなどのように地点A〜Fのうちの2点の間の線分は、必要に応じて省略してもよいし、下記のようにその一部を短縮した表示を行ってもよい。
【0035】
図4は、三つの線分が三角形の成立条件を満たさない場合に、その一部を短縮して表示した例を示すものである。図4では、三つの線分LG、LH、およびLGHで三角形OGHを構成しようとしている。線分LGは、出発地から地点Gまでの線分である。線分LHは、出発地から地点Hまでの線分である。線分LGHは、地点Gから地点Hまでの線分である。図4の例では、線分LGHの長さが、線分LGの長さと線分LHの長さとの和よりも長かったため三角形の成立条件を満たさなかった。そのため、線分LGHを一部点線で表示することにより、三角形の成立条件を満たす長さまで短縮した表示を行っている。
【0036】
時間基準地図30は、図5のように変形した道路地図50と共に表示モニタ12に表示してもよい。変形した道路地図50は、地点A〜Fの表示位置に基づいて距離基準地図20を変形したものである。図5の例では、地点A〜Fの位置を図2の印22A〜22Fの位置から図3の32A〜32Fの位置にそれぞれ移動させ、地点A〜Fの周囲の道路地図をその移動に合わせて伸縮させている。
【0037】
時間基準地図30のような表示は、ユーザが経路探索の目的地とする地点を選択するときなどに便利である。たとえば、ユーザが目的地とする地点の候補として地点A〜Fを選択した場合に、時間基準地図30を表示することにより、それぞれの地点までの所要時間を直感的に把握することができる。
【0038】
時間基準地図30などに表示する線分は、各種条件に従って線分の色などの表示態様を変更してもよい。たとえば、出発地から延びる線分と、地点間の線分とでは、表示態様を変更してもよい。また、図4のような場合についても表示態様を変更してよい。さらに、所要時間の算出に利用した交通情報の種類や、経路上の渋滞状況などによっても表示態様を変更してもよい。
【0039】
本実施の形態の地図表示装置では、表示モニタ12に表示する地図の形式を、図2の距離基準地図20のような表示と、または図5の時間基準地図30および変形した道路地図50のような表示とのいずれかから選択する。本実施の形態において表示する地図の形式を選択する処理について図6を用いて説明する。図6は、表示モニタ12に表示する地図の形式を選択する処理に関するフローチャートの一例である。図6の処理は、ナビゲーション装置1の制御部10の制御により実行される。
【0040】
図6のステップS101では、制御部10は、所要時間の算出などに用いる出発地を選択する。ステップS101の処理は、たとえば制御部10が入力装置16を制御し、ユーザによる出発地の入力を受け付けることにより実行できる。また、制御部10が車両の現在位置を特定し、特定した車両の現在位置を出発地として選択してもよい。図6の処理は、出発地が選択されたらステップS102に進む。
【0041】
図6のステップS102では、制御部10は、推奨経路の探索などに用いる目的地が図6の処理を開始する以前に予め設定されているか否かを判定する。図6の処理は、目的地が既に設定されている場合はステップS114に進み、そうでない場合はステップS103に進む。
【0042】
図6のステップS103では、制御部10は、入力装置16を制御して目的地の候補地を一つ以上選択する。ステップS103の処理は、たとえば制御部10が入力装置16を制御し、ユーザによる目的地の入力を受け付けることにより実行できる。ユーザは、任意に目的地の候補地を選択してもよいし、ナビゲーション装置1に施設検索処理などを実行させ、その結果を目的地の候補地としてもよい。図6の処理は、目的地の候補地が選択されたらステップS104に進む。
【0043】
図6のステップS104では、制御部10は、図5のような時間基準地図と変形した道路地図とを表示するための情報を生成する。ステップS104で実行される処理のフローチャートについては、図7を用いて後述する。図6の処理は、時間基準地図が生成されたらステップS105に進む。
【0044】
図6のステップS105では、制御部10は、ステップS104で生成した情報に基づいた時間基準地図や、変形した道路地図、出発地や目的地の候補地を示す印などを、図5のように表示モニタ12に表示し、図6の処理を終了する。
【0045】
図6のステップS114では、制御部10は、図2の距離基準地図20のような距離基準地図を生成する。図6の処理は、距離基準地図が生成されたらステップS115に進む。ステップS114で実行される距離基準地図を生成する処理は、たとえば次のようにして行う。制御部10は、記憶部11に記憶されている地図データに基づいて、ステップS103で選択された目的地の候補地の全てまたはその一部を含む地図範囲を決定する。次に制御部10は、その地図範囲を表示モニタ12に表示するための縮尺を決定する。そして、決定した地図範囲の地図を距離基準地図として地図データから抽出する。
【0046】
図6のステップS115では、制御部10は、ステップS114で生成した距離基準地図を、同じくステップS114で決定した縮尺で図2のように表示し、図6の処理を終了する。
【0047】
次に、図6のステップS104において実行される時間基準地図を生成する処理について、図7を用いて説明する。図7は、時間基準地図を生成する処理に関するフローチャートである。図7に示す処理は、制御部10により実行され、その処理の開始前に図6のステップS103において目的地の候補地が選択されている。
【0048】
図7のステップS201では、制御部10は、ステップS103で選択された目的地の候補地を組み合わせて方向決定地点対を決定する。方向決定地点対は、たとえば図8を用いて説明される以下のような方法で決定すればよい。
【0049】
図8では、図6のステップS103において、制御部10が目的地の候補地として図2の地点A〜Fを選択したものとする。まず、制御部10は、印21が示す出発地から延びる所定の方向を基準方向80として決定する。次に制御部10は、出発地から目的地の候補地である地点A〜Fに向かう方向81〜86と基準方向80との間の角度を、0〜360°の範囲で算出する。図8の例では、算出した角度が小さい順に目的地の候補地である地点A〜Fを並べると、[F,E,D,C,B,A]という順番になる。制御部10は、この順番[F,E,D,C,B,A]の中で、[FとE]や[EとD]などのように隣り合っている二つの地点を方向決定地点対とする。
【0050】
図7の処理は、図6のステップS103で選択された目的地の候補地について方向決定地点対が決定したら、ステップS201からステップS202に進む。
【0051】
図7のステップS202では、制御部10は、図6のステップS101で選択された出発地から図6のステップS103で選択された目的地の候補地までの所要時間を算出する。出発地から目的地の候補地までの所要時間は、たとえば経路探索処理などを実行することにより算出できる。図7の処理は、出発地から目的地の候補地までの所要時間を算出したらステップS203に進む。
【0052】
図7のステップS203では、制御部10は、ステップS201で決定した方向決定地点対のそれぞれについて、方向決定地点対とした二つの目的地の候補地の間の所要時間を算出する。所要時間の算出方法は、たとえばステップS202と同様に経路探索処理などを実行すればよい。
【0053】
図7の処理は、制御部10が各方向決定地点対について二つの目的地の候補地の間の所要時間を算出したら、ステップS203からステップS204に進む。
【0054】
図7のステップS204では、制御部10は、図3の説明において前述した固定方向を決定する。固定方向は、たとえばステップS201の処理の過程で算出した角度に基づいて決定すればよい。たとえば、出発地から、角度が最小である目的地の候補地を選択し、その候補地に向かう方向(図8の[F,E,D,C,B,A]の場合、出発地から地点Fへ向かう方向)を固定方向としてもよい。また、出発地から、角度の大きさの順番(たとえば[F,E,D,C,B,A])において真ん中にある目的地の候補地(たとえば地点C)を選択し、その候補地へ向かう方向を固定方向としてもよい。あるいは、出発地における車両の向きに最も近い候補地(地点C)を選択し、その候補地へ向かう方向を固定方向としてもよい。
【0055】
図7の処理は、制御部10が固定方向を決定したら、ステップS204からステップS205に進む。
【0056】
図7のステップS205では、制御部10は、ステップS201で決定した方向決定地点対と、ステップS202およびS203で算出した所要時間と、ステップS204で算出した固定方向に基づいて、目的地の候補地の表示位置を算出する。目的地の候補地の表示位置は、たとえば次のような方法で算出する。
【0057】
まず、ステップS202およびS203で算出した所要時間のそれぞれを引数とした所定の関数に基づいて、所要時間を表示モニタ12上の長さに変換する演算を行う。そして、方向決定地点対を成す二つの目的地の候補地について、出発地から各目的地の候補地までの移動に要する所要時間に応じた長さをそれぞれ有する二辺と、二つの目的地の候補地の間の移動に要する所要時間に応じた長さを有する一辺とにより三角形を構成する。次に、ステップS204で決定した固定方向に基づいて当該三角形を配置する方向を決定する。そして、当該三角形を表示モニタ12に配置したときの三角形の各頂点の表示位置を各目的地の候補地の表示位置として算出する。
【0058】
図7の処理は、制御部10が、各目的地の候補地の表示位置を算出したら、ステップS205からステップS206に進む。
【0059】
図7のステップS206では、制御部10は、ステップS205で算出した目的地の候補地の表示位置と記憶部11に記憶した地図データとに基づいて、変形した道路地図を生成する。
【0060】
制御部10は、変形した道路地図の生成が完了したらステップS206の処理を終了する。図7のステップS201〜S206の処理結果は、時間基準地図と変形した道路地図とを表示するための情報として、図6のステップS105以降で利用する。そこで、制御部10は、ステップS201〜S206の処理結果を図7の処理の戻り値として図6の処理に戻り、図6のステップS105に進む。
【0061】
以上で説明した実施形態によれば、次の作用効果を奏する。
【0062】
ユーザに入力装置12を介して出発地と目的地の候補地を選択させ(図6のステップS101とステップS103)、出発地から目的地の候補地までの移動に必要とする所要時間をそれぞれ算出し(図7のステップS202)、その所要時間に基づいて目的地の候補地の表示モニタ12上の表示位置を算出し、出発地から目的地の候補地の表示位置までの間に線分を表示する(図7のステップS205、図6のステップS105)。これにより、ユーザに目的地の候補地までの所要時間を直感的に認識させることができる。
【0063】
さらに、目的地の候補地が二つ以上あるときは、方向決定地点対を成す二つの目的地の候補地間の移動に必要とする所要時間を算出し(図7のステップS203)、その所要時間に基づいて目的地の候補地の表示モニタ12上の表示位置を算出し、二つの目的地の候補地の表示位置の間に線分を表示する(図7のステップS205、図6のステップS105)。これにより、ユーザに目的地の候補地間の移動の所要時間を直感的に認識させることができる。
【0064】
また、目的地の候補地の中から方向決定地点対を選択し(図7のステップS201)、目的地の候補地の中から一つを選択し、固定方向を決定する(図7のステップS204)。そして、方向決定地点対と、固定方向と、各所要時間に基づいて三角形を構成する位置に目的地の候補地の表示位置を決定する(図7のステップS205)。これにより、二つ以上の候補地について見やすい時間基準地図を作成できる。
【0065】
以上で説明した実施形態は、以下のように変形して実施できる。
【0066】
時間基準地図30において、線分LABなどのように地点A〜Fのうちの2点間の線分を省略する場合、線分LA〜LFの延在する方向は、図2の距離基準地図20において印21が示す位置から印22A〜22Fが示す位置に向かう方向と一致させてもよい。
【0067】
図5のような地図表示において、時間基準地図30または変形した道路地図50の表示/非表示を切り換えられるものとしてもよい。
【0068】
図5のような地図表示の代わりに時間基準地図30と距離基準地図20とを表示モニタ12に並べて表示するようにしてもよい。
【0069】
以上で説明した実施の形態では、印21が示す地点を出発地としたが、車両の現在位置としてもよい。この場合、時間地図表示30および変形した道路地図50は、車両の移動に伴って変化していくことが望ましい。
【0070】
以上で説明した実施の形態は、地図表示装置の一例としてナビゲーション装置1をとりあげたが、その内容に限定されるものではない。たとえば、ユーザのパソコンからインターネットを介してサーバへアクセスし、目的地検索が可能な検索システムなどに適用してもよい。
【0071】
以上で説明した実施の形態は、地図表示装置の一例としてジャイロセンサ15などを搭載したナビゲーション装置1をとりあげたが、本発明の地図表示装置は車両用に限定しない。たとえば、ユーザが徒歩などで移動するときに利用する地図表示装置に適用してもよい。さらに、移動手段の種類を選択可能とし、選択した移動手段の種類に応じて時間基準地図における各地点間の線分の長さを決定する所定の関数を決定することで、移動手段の種類ごとに時間基準地図を変化させてもよい。また、利用する移動手段の種類ごとに表示態様を変化させることで、複数の移動手段を利用した経路に関して時間基準地図を表示してもよい。
【0072】
以上で説明した各実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されない。
【符号の説明】
【0073】
1 ナビゲーション装置
10 制御部
11 記憶部
12 表示モニタ
13 スピーカ
14 GPS受信部
15 ジャイロセンサ
16 入力装置
17 交通情報受信部
20 距離基準地図
30 時間基準地図
50 変形した道路地図
【特許請求の範囲】
【請求項1】
道路地図を含む地図を表示し、前記地図上に出発地の位置と1以上の目的地の候補地の位置とを表示する地図表示装置であって、
前記道路地図の情報に関する情報を少なくとも含む地図データを記憶する地図データ記憶手段と、
前記出発地を選択する出発地選択手段と、
前記候補地を選択する候補地選択手段と、
前記出発地選択手段により選択された出発地から前記候補地選択手段により選択された各候補地までの移動に必要とする所要時間をそれぞれ算出する所要時間算出手段と、
前記所要時間算出手段により各候補地について算出された所要時間に基づいた長さだけ前記出発地の表示位置から離れた位置に各候補地の表示位置を決定し、前記出発地と各候補地の表示位置との間に線分を表示する時間地図表示手段とを備えることを特徴とする地図表示装置。
【請求項2】
請求項1の地図表示装置において、
前記候補地が2以上存在するときに、このうちいずれか二つの候補地の間の移動に必要とする所要時間を算出する候補地間所要時間算出手段を更に備え、
前記時間地図表示手段は、前記候補地間所要時間算出手段により算出された所要時間にそれぞれ対応した長さだけ離れた位置に当該二つの候補地の表示位置を決定し、当該二つの候補地の表示位置の間に線分を表示することを特徴とする地図表示装置。
【請求項3】
請求項2に記載の地図表示装置において、
前記2以上の候補地の中から一つを選択し、選択された候補地を表示する位置を決定するための方向を決定する方向決定手段と、
前記2以上の候補地の中から対となる候補地を一対以上選択する候補地対選択手段と、
前記所要時間算出手段により算出された所要時間と、前記候補地間所要時間算出手段により算出された所要時間と、前記方向決定手段により決定された方向と、前記候補地対選択手段により選択された前記候補地の対とに基づいて前記候補地の表示位置を算出する表示位置算出手段とを更に備え、
前記時間地図表示手段は、前記候補地の表示位置を前記表示位置算出手段が算出した表示位置に決定し、前記出発地と前記候補地の表示位置との間、および前記二つの候補地の表示位置の間に線分を表示することを特徴とする地図表示装置。
【請求項4】
請求項3に記載の地図表示装置において、
前記表示位置算出手段は、
前記対となる二つの候補地のそれぞれについて前記所要時間算出手段により算出された所要時間に応じた長さを各々が有する二つの辺と、当該対となる二つの候補地の間について前記候補地間所要時間算出手段により算出された所要時間に応じた長さを有する一辺とにより三角形を構成し、
前記出発地から見て前記方向決定手段により決定された方向に当該候補地が配置されるように前記三角形の配置方向を決定し、
前記決定された配置方向における三角形の各頂点の表示位置を算出することにより、当該三角形の各頂点に対応した各候補地の表示位置を算出することを特徴とする地図表示装置。
【請求項5】
請求項1から4のいずれか一項に記載の地図表示装置において、
前記時間地図表示手段は、前記候補地の表示位置に基づいて、前記道路地図を変形した地図を前記表示画面に表示することを特徴とする地図表示装置。
【請求項6】
請求項1から5のいずれか一項に記載の地図表示装置において、
前記所要時間は、道路に関する情報と少なくとも渋滞に関する情報を含む交通情報とに基づいて算出することを特徴とする地図表示装置。
【請求項7】
請求項6に記載の地図表示装置において、
前記時間地図表示手段は、所要時間の算出に利用した交通情報の種類に応じて表示態様を変えることを特徴とする地図表示装置。
【請求項1】
道路地図を含む地図を表示し、前記地図上に出発地の位置と1以上の目的地の候補地の位置とを表示する地図表示装置であって、
前記道路地図の情報に関する情報を少なくとも含む地図データを記憶する地図データ記憶手段と、
前記出発地を選択する出発地選択手段と、
前記候補地を選択する候補地選択手段と、
前記出発地選択手段により選択された出発地から前記候補地選択手段により選択された各候補地までの移動に必要とする所要時間をそれぞれ算出する所要時間算出手段と、
前記所要時間算出手段により各候補地について算出された所要時間に基づいた長さだけ前記出発地の表示位置から離れた位置に各候補地の表示位置を決定し、前記出発地と各候補地の表示位置との間に線分を表示する時間地図表示手段とを備えることを特徴とする地図表示装置。
【請求項2】
請求項1の地図表示装置において、
前記候補地が2以上存在するときに、このうちいずれか二つの候補地の間の移動に必要とする所要時間を算出する候補地間所要時間算出手段を更に備え、
前記時間地図表示手段は、前記候補地間所要時間算出手段により算出された所要時間にそれぞれ対応した長さだけ離れた位置に当該二つの候補地の表示位置を決定し、当該二つの候補地の表示位置の間に線分を表示することを特徴とする地図表示装置。
【請求項3】
請求項2に記載の地図表示装置において、
前記2以上の候補地の中から一つを選択し、選択された候補地を表示する位置を決定するための方向を決定する方向決定手段と、
前記2以上の候補地の中から対となる候補地を一対以上選択する候補地対選択手段と、
前記所要時間算出手段により算出された所要時間と、前記候補地間所要時間算出手段により算出された所要時間と、前記方向決定手段により決定された方向と、前記候補地対選択手段により選択された前記候補地の対とに基づいて前記候補地の表示位置を算出する表示位置算出手段とを更に備え、
前記時間地図表示手段は、前記候補地の表示位置を前記表示位置算出手段が算出した表示位置に決定し、前記出発地と前記候補地の表示位置との間、および前記二つの候補地の表示位置の間に線分を表示することを特徴とする地図表示装置。
【請求項4】
請求項3に記載の地図表示装置において、
前記表示位置算出手段は、
前記対となる二つの候補地のそれぞれについて前記所要時間算出手段により算出された所要時間に応じた長さを各々が有する二つの辺と、当該対となる二つの候補地の間について前記候補地間所要時間算出手段により算出された所要時間に応じた長さを有する一辺とにより三角形を構成し、
前記出発地から見て前記方向決定手段により決定された方向に当該候補地が配置されるように前記三角形の配置方向を決定し、
前記決定された配置方向における三角形の各頂点の表示位置を算出することにより、当該三角形の各頂点に対応した各候補地の表示位置を算出することを特徴とする地図表示装置。
【請求項5】
請求項1から4のいずれか一項に記載の地図表示装置において、
前記時間地図表示手段は、前記候補地の表示位置に基づいて、前記道路地図を変形した地図を前記表示画面に表示することを特徴とする地図表示装置。
【請求項6】
請求項1から5のいずれか一項に記載の地図表示装置において、
前記所要時間は、道路に関する情報と少なくとも渋滞に関する情報を含む交通情報とに基づいて算出することを特徴とする地図表示装置。
【請求項7】
請求項6に記載の地図表示装置において、
前記時間地図表示手段は、所要時間の算出に利用した交通情報の種類に応じて表示態様を変えることを特徴とする地図表示装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−221356(P2011−221356A)
【公開日】平成23年11月4日(2011.11.4)
【国際特許分類】
【出願番号】特願2010−91669(P2010−91669)
【出願日】平成22年4月12日(2010.4.12)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成23年11月4日(2011.11.4)
【国際特許分類】
【出願日】平成22年4月12日(2010.4.12)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]