
地域識別装置、および地域識別プログラム
【課題】車両に搭載され、自車両が走行する地域を識別する地域識別装置、および地域識別プログラムにおいて、自車両周囲の文字や記号が使用されている地域を精度よく特定できるような技術を提供する。
【解決手段】現在地識別装置1においては、自車両周囲の撮像画像に含まれる文字または記号を表す特定対象物を抽出し、複数の文字または記号が有するそれぞれの特徴と各文字または記号に対応する地域とを対応付けたデータベースを検索することによって、抽出した特定対象物がデータベース中の文字または記号である確度を演算する(S410〜S430)。抽出した特定対象物において、前述の確度が最大となり、かつ基準となる確度以上となるデータベース中の文字または記号を選択し、この選択した文字または記号に対応する地域をデータベースから抽出し、この抽出した地域を自車両が走行する地域として識別する(S450〜S480)。
【解決手段】現在地識別装置1においては、自車両周囲の撮像画像に含まれる文字または記号を表す特定対象物を抽出し、複数の文字または記号が有するそれぞれの特徴と各文字または記号に対応する地域とを対応付けたデータベースを検索することによって、抽出した特定対象物がデータベース中の文字または記号である確度を演算する(S410〜S430)。抽出した特定対象物において、前述の確度が最大となり、かつ基準となる確度以上となるデータベース中の文字または記号を選択し、この選択した文字または記号に対応する地域をデータベースから抽出し、この抽出した地域を自車両が走行する地域として識別する(S450〜S480)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載され、自車両が走行する地域を識別する地域識別装置、および地域識別プログラムに関する。
【背景技術】
【0002】
上記地域識別装置として、撮像画像中の標識と、データベース中の標識とをパターンマッチングすることで標識および標識が使用されている地域を特定する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−222485号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記地域識別装置では、標識の一部が汚れている場合や、擦れている場合、或いは、似たような標識を複数の異なる地域で利用している場合に、標識が使用されている地域を特定できない虞がある。また、標識から地域を特定する場合に限らず、自車両周囲の看板や路面に描かれている文字や記号等、自車両周囲に存在する文字や記号から地域を特定する構成においても同様の虞がある。
【0005】
そこで、このような問題点を鑑み、車両に搭載され、自車両が走行する地域を識別する地域識別装置、および地域識別プログラムにおいて、自車両周囲の文字や記号が使用されている地域を精度よく特定できる技術を提供することを本発明の目的とする。
【課題を解決するための手段】
【0006】
かかる目的を達成するために成された第1の構成の地域識別装置において、撮像画像取得手段は、自車両周囲の撮像画像を取得し、確度演算手段は、撮像画像に含まれる文字または記号を表す特定対象物を抽出し、複数の文字または記号が有するそれぞれの特徴と各文字または記号に対応する地域とを対応付けたデータベースを検索することによって、抽出した特定対象物がデータベース中の文字または記号である確度を演算する。そして、識別手段は、抽出した特定対象物において、前述の確度が最大となり、かつ基準となる確度以上となるデータベース中の文字または記号を選択し、この選択した文字または記号に対応する地域を前記データベースから抽出し、この抽出した地域を自車両が走行する地域として識別する。
【0007】
このような地域識別装置によれば、標識等の車外物の全体像でなく、撮像画像に含まれる特定対象物から地域を識別するので、全体像の一部に擦れ等、画像認識に不具合をもたらす事象が生じていたとしても、特定対象物を認識できれば、特定対象物が描かれた標識、道路ペイント等の車外物が使用されている地域を精度よく識別することができる。よって、自車両が走行する地域を精度よく識別することができる。
【0008】
なお、本発明でいう「複数の文字または記号」とは、文字および記号が合わせて複数であることを示し、文字のみ、或いは記号のみから構成されていてもよいし、文字と記号とを組み合わせて構成されていてもよい。また、「複数の文字または記号が有するそれぞれの特徴」とは、例えば、文字または記号が有する形状や配置等を示す。
【0009】
ところで、上記地域識別装置においては、第2の構成のように、確度演算手段は、撮像画像において、特定対象物が存在する領域を所定の複数の領域に分割し、この分割した各領域に特定対象物の特徴的形状が存在するか否かに応じて、抽出した特定対象物がデータベース中の各文字または記号である確度を演算するようにしてもよい。
【0010】
このような地域識別装置によれば、分割した領域毎に特徴的部分の有無を判断するので、特定対象物を特定する精度を向上させることができる。なお、本発明において「特徴的形状」とは、例えば、文字や記号における、はね、止め、はらい、線の途切れ、線の丸み、角の丸み、面取り等の形状を示す。
【0011】
また、上記地域識別装置においては、第3の構成のように、複数の文字または記号について、各文字または各記号を所定の複数の領域に分割し、分割した各領域に文字または記号の特徴的形状が存在するか否かに応じて各領域に対して点数付けを行ったデータベースを予め準備しておき、確度演算手段は、特定対象物に特徴的形状が存在するか否かに応じて各領域に対して点数付けを行い、各領域における点数の分布を、データベース内の各領域における点数の分布と比較することによって、抽出した特定対象物がデータベース中の各文字または記号である確度を演算するようにしてもよい。
【0012】
このような地域識別装置によれば、特定対象物がデータベース中に存在するか否かを点数によって求めるので、コンピュータによる処理に適した構成とすることができる。
さらに、上記地域識別装置においては、第4の構成のように、撮像画像から特定対象物を抽出する際の信頼度に関する情報を取得する信頼度取得手段と、取得した信頼度が低くなるにつれて、確度演算手段による確度が低くなるように補正する確度補正手段と、を備えていてもよい。
【0013】
このような地域識別装置によれば、撮像画像の信頼度に応じて確度を補正するので、信頼度が低い撮像画像における特定対象物に対して高確度で特定の文字や記号であると判断することを防止することができる。
【0014】
また、上記地域識別装置においては、第5の構成のように、特定対象物が表示される方向である表示方向を特定する表示方向特定手段と、撮像画像を撮像する際の方向である撮像方向と表示方向との相違に応じて撮像画像中の特定対象物の形状を補正する形状補正手段と、を備えていてもよい。
【0015】
すなわち、例えば道路標識のように、自車両の方向に文字等の特定対象物が向けられて表示されている場合(撮像方向と表示方向とが一致する場合)には、ほとんど特定対象物の形状を補正することなくデータベース中の文字や記号の形状と一致させることができるが、路上のペイントやビルの壁面に備えられた看板等のように、自車両の方向に文字等の特定対象物が向けられることなく表示されている場合(撮像方向と表示方向とが一致しない場合)には、形状に歪みが生じるため、データベース中の文字や記号の形状と一致させることができない場合がある。このため、本発明では、撮像方向と表示方向との相違に応じて撮像画像中の特定対象物の形状を補正するのである。
【0016】
このような地域識別装置によれば、撮像方向と表示方向とが一致しないことによって撮像画像中の特定対象物の形状に歪みが生じていたとしても、この特定対象物の形状を補正するので、データベース中の文字や記号であるかを確実に認識することができる。
【0017】
加えて、上記地域識別装置においては、第6の構成のように、形状補正手段は、特定対象物が存在する撮像画像中の位置に応じて各方向の相違を判断するようにしてもよい。例えば、撮像画像中において、道路の両端部の位置と無限遠点の位置が分かれば、道路の両端部の位置と無限遠点の位置とを結ぶ直線によって撮像画像中の領域を区分し、これらの直線の下側の領域については道路上のペイントとみなして表示方向を特定し、これらの直線の上側の領域については標識とみなして表示方向を特定するようにすればよい。
【0018】
このような地域識別装置によれば、特定対象物が存在する撮像画像中の位置に応じて特定対象物が表示される方向と撮像画像の撮像方向との相違の相違を判断するので、特定対象物が表示される方向を容易に特定することができる。
【0019】
また、上記地域識別装置においては、第7の構成のように、特定された地域に対応する情報を出力する出力手段を備えていてもよい。
このような地域識別装置によれば、地域を特定するだけでなく、特定した地域に対応する情報を出力することができる。
【0020】
さらに、上記地域識別装置においては、第8の構成のように、出力手段は、特定された地域に対応する交通情報を出力するようにしてもよい。
このような地域識別装置によれば、特定された地域に対応する交通情報(例えば、最高速度情報や渋滞情報、走行車線の位置等の各種情報)を出力するので、車両のドライバの運転操作を支援することができる。
【0021】
また、上記地域識別装置においては、第9の構成のように、画像処理によらない手法で検出された自車両の位置の情報を、自車両の位置を検出した時刻の情報とともに取得する位置情報取得手段を備え、地域識別手段は、地域を識別する際に、自車両の位置の情報と時刻の情報とを加味して地域を識別するようにしてもよい。
【0022】
このような地域識別装置によれば、本発明の地域識別装置を、位置検出手段の精度向上や位置検出手段が利用できない場合の補完として利用することができる。
さらに、上記地域識別装置においては、第10の構成のように、地域識別装置は、複数回、車両が走行する地域を特定し、地域特定手段は、地域を特定する際に、そのときの時刻を記録し、過去における地域の特定結果と過去において地域を特定した時刻とを加味して地域を特定するようにしてもよい。
【0023】
このような地域識別装置によれば、過去における地域の特定結果と過去において地域を特定した時刻とを加味して地域を特定するので、1回限り地域を識別する構成と比較して、地域の識別精度を向上させることができる。
【0024】
次に、上記目的を達成するために成された第11の構成としての地域識別プログラムは、コンピュータを、上記何れか1項に記載の地域識別装置における各手段として機能させるためのプログラムであることを特徴とする。
【0025】
このような地域識別プログラムによれば、少なくとも請求項1に記載の地域識別装置と同様の効果を享受することができる。
【図面の簡単な説明】
【0026】
【図1】現在地識別装置1の概略構成を示すブロック図である。
【図2】地域特定処理を示すフローチャートである。
【図3】特定対象物抽出処理を示すフローチャートである。
【図4】対象物の表示方向を示す前方画像である。
【図5】字体特徴量を示す説明図である。
【図6】識別処理を示すフローチャートである。
【図7】字体の違いを示す説明図である。
【図8】交通情報の出力例を示す説明図である。
【発明を実施するための形態】
【0027】
以下に本発明にかかる実施の形態を図面と共に説明する。
[本実施形態の構成]
図1は、本発明が適用された現在地識別装置1(地域識別装置)の概略構成を示すブロック図である。現在地識別装置1は、車両に搭載され、自車両(現在地識別装置1が搭載された車両)が走行する地域(国、州、県等の行政区分や地方)を識別する機能を有し、周知のカーナビゲーションとしての機能も備えている。
【0028】
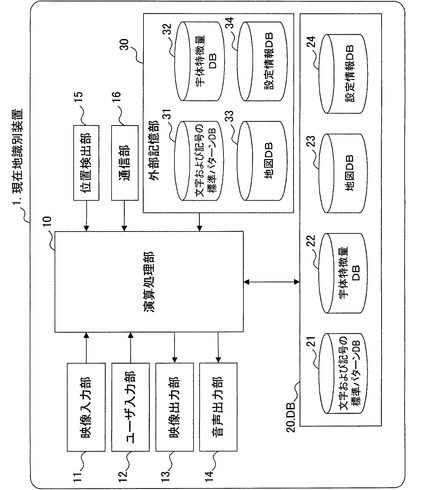
詳細には、図1に示すように、現在地識別装置1は、演算処理部10と、映像入力部11と、ユーザ入力部12と、映像出力部13と、音声出力部14と、位置検出部15と、通信部16と、データベース(DB)20と、外部記憶部30とを備えている。
【0029】
演算処理部10は、CPU、ROM、RAM等を備えた周知のマイコンとして構成されており、ROMに格納されたプログラム(地域識別プログラムを含む)や、RAMにロードされたプログラム等のデータ、或いは、外部から当該演算処理部10に入力されるデータに基づく各種処理を実施する。
【0030】
映像入力部11は、周知のカメラとして構成されており、自車両の天井付近に自車両の前方領域を撮像可能に配置されている。この映像入力部11は、例えば100ms毎に前方領域を撮像し、得られた撮像画像を演算処理部10に送る。
【0031】
ユーザ入力部12は、車両の運転者等のユーザが現在地識別装置1に対する指令を入力するためのボタンやタッチパネル等のユーザインタフェースとして構成されている。映像出力部13は、周知のディスプレイとして構成されている。
【0032】
音声出力部14は、周知のスピーカとして構成されており、演算処理部10による指令に応じて音(音声を含む)を出力する。位置検出部15は、人工衛星から送信される電波やマップマッチング等を利用した処理を行うことで、自車両が存在する位置を検出し、演算処理部10は、位置検出部15からこの位置の検出結果を必要に応じて取得する(位置情報取得手段)。
【0033】
通信部16は、車両内の他の装置や、車両外部の装置と通信するための通信インタフェースとして構成されている。データベース(DB)20は、文字および記号の標準パターンDB21と、字体特徴量DB22と、地図DB23と、設定情報DB24とを備えている。
【0034】
文字および記号の標準パターンDB21は、一般的な文字や記号の形状に関する情報が含まれており、撮像画像中に含まれる対象物と、この情報とをパターンマッチング等することによって、撮像画像中に文字や記号が含まれているかどうかを検出することができるよう設定されている。このDB21においては、撮像画像中に文字や記号が含まれているかどうかを検出できればよいため、1つの文字や記号について、1乃至2程度の形状に関する情報を備えていればよい。
【0035】
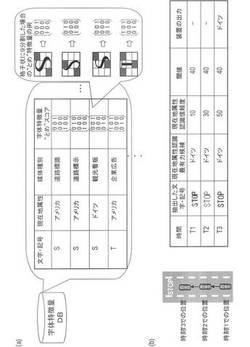
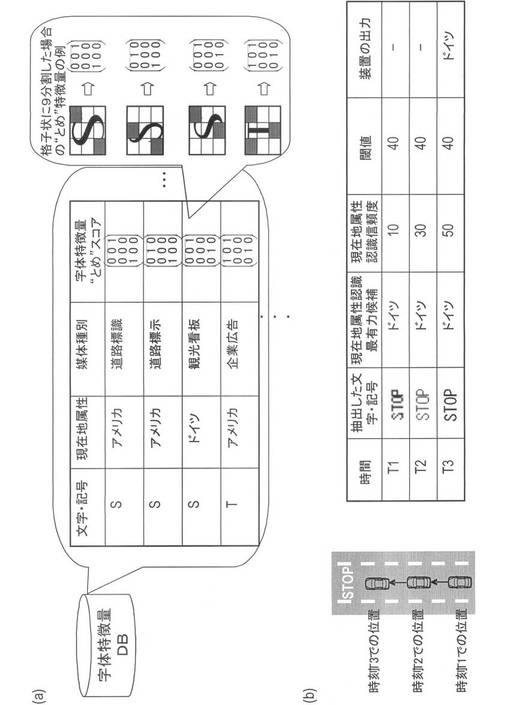
字体特徴量DB22は、複数の文字または記号について、各文字または各記号を所定の複数の領域に分割し、分割した各領域に文字または記号の特徴的形状が存在するか否かに応じて各領域に対して点数(「1」または「0」)付けを行った情報を備えており、複数の文字または記号に対して、各文字または記号に対応する地域が対応付けられている。このDB22においては、1つの文字や記号について、利用されている地域の種類の数に応じて複数の点数付けを行った情報が備えられている。
【0036】
また、本実施形態でいう特徴的形状とは、例えば、文字や記号における、はね、止め、はらい、線の途切れ、線の丸み、角の丸み、面取り等の形状等を示し、これらの形状が分割した各領域に存在するか否かに応じて、点数が付されている。また、字体特徴量DB22には、文字または記号を構成する線の太さの情報も含まれている。
【0037】
地図DB23は、緯度経度の情報が対応付けられた周知のデジタルマップを備えている。設定情報DB24は、現在地識別装置1の作動状態や現在時刻の情報、或いは過去において検出された現在地の情報等が記録される。
【0038】
外部記憶部30は、例えばフラッシュメモリ等の着脱自在な記録装置として構成されている。この外部記憶部30内には、文字および記号の標準パターンDB31と、字体特徴量DB32と、地図DB33と、設定情報DB34とが備えられている。外部記憶部30内のデータは、基本的には、データベース20の内容と同様であり、この外部記憶部30はデータベース20のバックアップとして利用される。なお、外部記憶部30の内のデータが更新されると、データベース20内のデータを更新するようにしてもよく、このようにすれば、外部記憶部30を利用してデータベース20内のデータを更新することができる。
【0039】
[本実施形態の処理]
次に上記の現在地識別装置1において実行される地域を識別する処理について図2以下の図面を用いて説明する。図2は演算処理部10が実行する地域特定処理を示すフローチャート、図3は地域特定処理のうちの特定対象物抽出処理を示すフローチャートである。また、図6は地域特定処理のうちの識別処理を示すフローチャートである。
【0040】
なお、本処理において、S120〜S140、S410〜S430の処理は本発明でいう確度演算手段に相当し、S450〜S480の処理は識別手段に相当する。
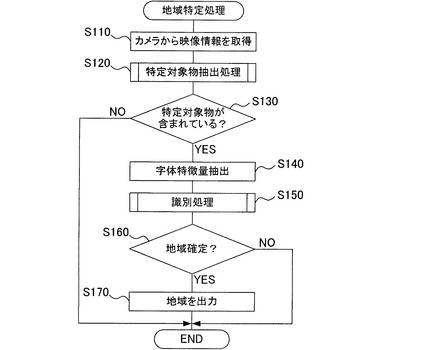
地域特定処理は、例えば、位置検出部15によって位置を検出できない場合に開始され、その後、位置検出部15によって位置を検出できない状態が解消するまで、撮像画像が得られる周期で(例えば100ms毎に)繰り返し実施される処理である。詳細には、まず、自車両周囲の撮像画像を映像入力部11から取得する(S110:撮像画像取得手段)。
【0041】
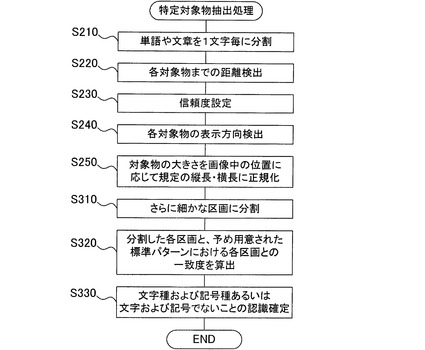
そして、特定対象物抽出処理を実施する(S120)。特定対象物抽出処理は、撮像画像から文字または記号を表す特定対象物を抽出する処理である。
詳細には、図3に示すように、まず、撮像画像中に存在する単語や文章、或いはその他の対象物を1つずつ抽出する(S210)。この処理では、撮像画像中のエッジ成分を抽出し、各エッジ成分の位置に基づき周知の文字認識のアルゴリズムを利用して、各文字や記号、或いはその他の対象物が占める領域を特定し、対象物の1つ1つを識別して抽出する。
【0042】
そして、各対象物までの距離を検出する(S220:信頼度取得手段)。対象物までの距離は、例えばレーダ装置等の距離検出装置を備えている場合には、この距離検出装置によって検出すればよい。また、距離検出装置を備えていない場合には、撮像画像中の対象物の位置や大きさに応じて対象物までの距離を特定する。
【0043】
続いて、撮像画像の信頼度を設定する(S230:確度補正手段)。この処理では、対象物までの距離が遠くなるにつれて撮像画像中の対象物が小さくなり、判別が困難になるため、対象物までの距離が遠くなるにつれて信頼度を低く設定する。なお、この処理で設定される信頼度は、対象物が文字等の特定対象物である確度を算出する際に利用され、信頼度が低くなるにつれて、対象物が特定対象物である確度が低く設定される。
【0044】
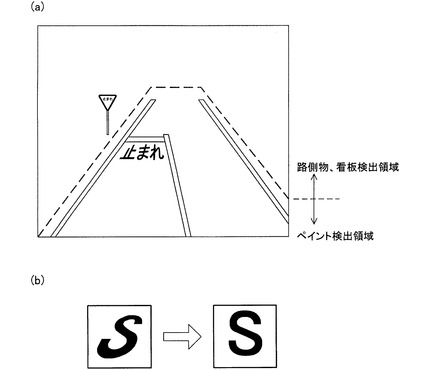
次に、対象物が文字や記号等の特定対象物であると仮定した場合、この対象物が表示されている方向を検出する(S240:表示方向特定手段)。この処理では、例えば、図3(a)に示すように、撮像画像中の無限遠点の位置(無限遠点の位置は、予め設定された位置や、白線の位置から推定される。)から、撮像画像の領域を、路側物や看板が配置されている可能性が高い領域(図3(a)の破線よりも上側の領域)と、路面のペイントが配置されている可能性が高い領域(図3(a)の破線よりも下側の領域)とに分け、対象物が何れの領域に属しているかに応じて、対象物が表示されている方向を特定する。
【0045】
なお、レーダ装置やソナー装置を備えている場合には、対象物による反射波のレベルに応じて対象物が表示されている方向を特定してもよい。つまり、対象物が表示されている方向(反射面)が撮像方向(送信波の送信方向)と一致している場合には、反射波のレベルが高く、対象物が表示されている方向と撮像方向との相違が大きくなるにつれて反射波のレベルが小さくなる性質を利用すればよい。
【0046】
続いて、対象物の大きさ、および形状を画像中の位置(対象物が表示されている方向)に応じて規定の形状に正規化する(S250:形状補正手段)。この処理では、例えば、自車両側に向けて表示された標識に「S」の文字が描かれていた場合には、図3(b)右図に示すように正面から撮像されるため、表示方向による歪みを補正する必要はない。
【0047】
一方で、例えば図3(b)左図に示すように、路面に「S」という文字が描かれていた場合には、手前側に描かれている部分の幅が広く、遠方側に描かれている部分の幅が狭く見える。このため、対象物の形状を図3(b)右図に示すようなバランスのよい形状(対象物を表示方向(真上)から見たときの形状)に補正する。
【0048】
また、縦長の対象物や、横長の対象物についても正規化する。つまり、認識するにあたって適切なバランス(縦横比)となるように形状を補正する。
そして、各対象物について、対象物が存在する領域を細かな区画に分割する(S310)。この処理では、例えば、図5(a)に示すように、1つの対象物を、縦方向および横方向に3等分することで9等分する。
【0049】
続いて、対象物において分割した各区画における形状と、予め文字および記号の標準パターンDB21に準備された標準的な文字や記号のパターンにおける各区画の形状とを比較し、一致度(確度)を算出する(S320)。この処理では、分割した区画毎に周知のパターンマッチング等の処理を行えばよい。
【0050】
そして、一致度に基づいて、対象物が文字等の特定対象物であるか否かを判定する(S330)。この処理では、対象物がある特定対象物である確度が一定以上(例えば70%以上)であると判定されると、その特定対象物であると判定される。また、確度が一定未満であれば、この対象物は特定対象物ではない物体と判定される。
【0051】
このような特定対象物抽出処理が終了すると、図2に戻り、撮像画像中に特定対象物が含まれているか否かを判定する(S130)。撮像画像中に特定対象物が含まれていなければ(S130:NO)、地域特定処理を終了する。
【0052】
また、撮像画像中に特定対象物が含まれていれば(S130:YES)、字体特徴量を抽出する(S140)。字体特徴量の抽出では、抽出された特定対象物毎に、分割された各領域に、この分割した各領域に特定対象物の特徴的形状が存在するか否かを判定し、この結果に応じて、各領域に点数(スコア)付けを行う。本実施形態では、特徴的形状が存在すれば、その領域に「1」を付し、特徴的形状が存在しなければ、その領域に「0」を付すことで点数付けを行う。
【0053】
字体特徴量としては、例えば、文字や記号における、はね、止め、はらい、線の途切れ、線の丸み、角の丸み、面取り等の形状等が挙げられる。例えば、文字「S」について、「止め」の位置の有無を判定した場合には、図5(a)に示すように、字体によって「止め」の位置が異なることが分かる。このように、この処理では、「止め」や「はね」等の複数の字体特徴量の有無を検出する。
【0054】
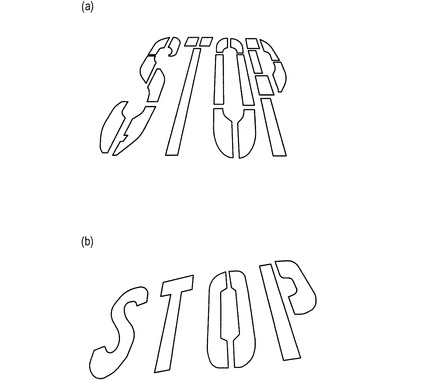
続いて、識別処理を実施する(S150)。この識別処理は、特定対象物の字体特徴量とデータベース中の文字または記号が有する字体特徴量とを比較することによって、特定対象物がデータベース中の何れかの文字または記号に該当するかを検出し、地域を特定する処理である。例えば、図7(a)、図7(b)に示すように、異なる地域において路上に「STOP」と描かれている場合があるが、地域によってその字体が異なる場合があるため、本処理では、この字体の違いを検出することで、地域を特定する。
【0055】
詳細には、図6に示すように、まず、特定対象物の媒体種別を認識する(S410)。ここで、媒体種別とは、例えば、道路標識、ペイント等の道路標示、広告、観光案内看板、交通事故防止等の啓発用看板等が挙げられる。媒体種別を認識するには、S240の処理で説明したように、路上のペイントであるか否かを識別し、その後、画像中の位置や文字の大きさ、或いは配列等に応じて詳細に種別を識別するようにすればよい。
【0056】
続いて、正規化済みの特定対象物について、字体特徴量DB22に含まれる文字または記号の太さの情報と特定対象物を構成する線の太さとを比較することで、一致度のスコアを算出する(S420)。そして、特定対象物の局所的特徴(つまり、分割された領域毎の特徴的形状の有無)に従って、一致度のスコアを算出する(S430)。
【0057】
続いて、各一致度のスコアを考慮した総合的なスコアを算出する(S440)。この処理の際には、S230の処理で設定された信頼度が低くなるにつれてスコアを低く設定する。例えば、信頼度を考慮しない場合に100点が付される場合であっても、信頼度を考慮すると80点や60点等に減点される場合があり得る。
【0058】
そして、最もスコアが高い文字または記号に対応する地域を字体特徴量DB22から抽出し、この地域を自車両が走行する地域として仮決定する(S450)。次に、フィルタリングによるスコア補正を行う(S460)。
【0059】
この処理では、過去において、位置検出部15や地域特定処理で得られた地域の検出結果を設定情報DB24から取得し、この検出結果を考慮してスコア補正を行う。例えば、近い過去における地域の検出結果が10回連続して日本の愛知県であった場合、1回のみイギリスのある地域と判定されたとしても、このイギリスとの判定結果は信頼性が低いものとしてスコアを低く設定する。つまり、過去における位置の検出結果とその位置を検出した時刻とを考慮したローパスフィルタを設定し、位置の検出結果が急激に変化しないようにすればよい。
【0060】
続いて、スコアが所定の閾値以上(例えば満点の4割以上)となる地域が存在するか否かを判定する(S470)。スコアが閾値以上となる地域が存在すれば(S470:YES)、スコア(確度)が最大となる地域を現在時刻における地域として確定し(S480)、識別処理を終了する。
【0061】
この処理では、例えば図5(b)に示すように、自車両が特定対象物から遠い状態(時刻T1、T2の状態)では、スコア(現在地属性認識信頼度)が低いため、地域の出力(装置からの出力)がされないが、自車両が特定対象物から近い状態(時刻T3の状態)では、スコアが高くなり、地域(ドイツである旨)の出力がされる。
【0062】
また、スコアが閾値以上となる地域が存在しなければ(S470:NO)、直ちに識別処理を終了する。なお、S170の処理の際には、確定された地域と、地域が確定された時刻の情報とを設定情報DB24に記録させる。
【0063】
このような識別処理が終了すると、図2に戻り、識別処理にて地域が確定されたか否かを判定する(S160)。地域が確定されていれば(S160:YES)、確定された地域を出力し(S170:出力手段)、地域特定処理を終了する。
【0064】
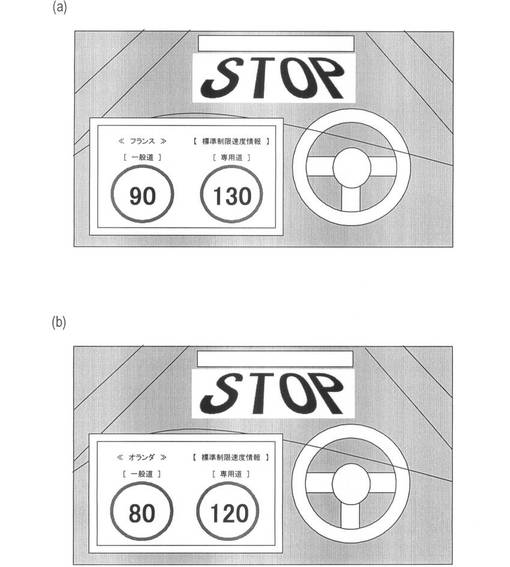
なお、S170の処理において、地域を出力すると、別途交通情報を出力する処理が実施され、例えば、この地域の法定速度の情報等の交通情報が映像出力部13や音声出力部14を介して出力される。例えば、特定された地域がフランスのある地域である場合には、図8(a)に示すように、法定速度の情報として、一般道90km/h、高速道路等の専用道130km/hと出力される。
【0065】
また、特定された地域がオランダのある地域である場合には、図8(b)に示すように、法定速度の情報として、一般道80km/h、高速道路等の専用道120km/hと出力される。また、地域が確定されていなければ(S160:NO)、直ちに地域特定処理を終了する。
【0066】
[本実施形態による効果]
以上のように詳述した現在地識別装置1において、演算処理部10は、自車両周囲の撮像画像を取得し、撮像画像に含まれる文字または記号を表す特定対象物を抽出し、複数の文字または記号が有するそれぞれの特徴(文字または記号が有する形状や配置等)と各文字または記号に対応する地域とを対応付けたデータベースを検索することによって、抽出した特定対象物がデータベース中の文字または記号である確度を演算する。そして、演算処理部10は、抽出した特定対象物において、前述の確度が最大となり、かつ基準となる確度以上となるデータベース中の文字または記号を選択し、この選択した文字または記号に対応する地域をデータベースから抽出し、この抽出した地域を自車両が走行する地域として識別する。
【0067】
このような現在地識別装置1によれば、標識等の車外物の全体像でなく、撮像画像に含まれる特定対象物から地域を識別するので、全体像の一部に擦れ等、画像認識に不具合をもたらす事象が生じていたとしても、特定対象物が描かれた標識、道路ペイント等の車外物が使用されている地域を精度よく識別することができる。よって、自車両が走行する地域を精度よく識別することができる。
【0068】
また、現在地識別装置1において演算処理部10は、撮像画像において、特定対象物が存在する領域を所定の複数の領域に分割し、この分割した各領域に特定対象物の特徴的形状(例えば、文字や記号における、はね、止め、はらい、線の途切れ、線の丸み、角の丸み、面取り等の形状)が存在するか否かに応じて、抽出した特定対象物がデータベース中の各文字または記号である確度を演算する。
【0069】
このような現在地識別装置1によれば、分割した領域毎に特徴的部分の有無を判断するので、特定対象物を特定する精度を向上させることができる。
また、現在地識別装置1においては、複数の文字または記号について、各文字または各記号を所定の複数の領域に分割し、分割した各領域に文字または記号の特徴的形状が存在するか否かに応じて各領域に対して点数付けを行ったデータベースを予め準備しており、演算処理部10は、特定対象物に特徴的形状が存在するか否かに応じて各領域に対して点数付けを行い、各領域における点数の分布を、データベース内の各領域における点数の分布と比較することによって、抽出した特定対象物がデータベース中の各文字または記号である確度を演算する。
【0070】
このような現在地識別装置1によれば、特定対象物がデータベース中に存在するか否かを点数によって求めるので、コンピュータによる処理に適した構成とすることができる。
さらに、現在地識別装置1において演算処理部10は、撮像画像から特定対象物を抽出する際の信頼度に関する情報を取得し、取得した信頼度が低くなるにつれて、特定対象物が文字または記号である確度が低くなるように補正する。
【0071】
このような現在地識別装置1によれば、撮像画像の信頼度に応じて確度を補正するので、信頼度が低い撮像画像における特定対象物に対して高確度で特定の文字や記号であると判断することを防止することができる。
【0072】
また、現在地識別装置1において演算処理部10は、特定対象物が表示される方向である表示方向を特定し、撮像画像を撮像する際の方向である撮像方向と表示方向との相違に応じて撮像画像中の特定対象物の形状を補正する。
【0073】
すなわち、例えば道路標識のように、自車両の方向に文字等の特定対象物が向けられて表示されている場合(撮像方向と表示方向とが一致する場合)には、ほとんど特定対象物の形状を補正することなくデータベース中の文字や記号の形状と一致させることができるが、路上のペイントやビルの壁面に備えられた看板等のように、自車両の方向に文字等の特定対象物が向けられることなく表示されている場合(撮像方向と表示方向とが一致しない場合)には、データベース中の文字や記号の形状と一致させることができない場合がある。このため、本発明では、撮像方向と表示方向との相違に応じて撮像画像中の特定対象物の形状を補正する。
【0074】
このような現在地識別装置1によれば、撮像方向と表示方向とが一致しないことによって撮像画像中の特定対象物の形状に歪みが生じていたとしても、この特定対象物の形状を補正するので、データベース中の文字や記号であるかを確実に認識することができる。
【0075】
加えて、現在地識別装置1において演算処理部10は、特定対象物が存在する撮像画像中の位置に応じて各方向の相違を判断する。
このような現在地識別装置1によれば、特定対象物が存在する撮像画像中の位置に応じて特定対象物が表示される方向と撮像画像の撮像方向との相違の相違を判断するので、特定対象物が表示される方向を容易に特定することができる。
【0076】
また、現在地識別装置1において演算処理部10は、特定された地域に対応する情報を出力する。
このような現在地識別装置1によれば、地域を特定するだけでなく、特定した地域に対応する情報を出力することができる。
【0077】
さらに、現在地識別装置1において演算処理部10は、特定された地域に対応する交通情報を出力する。
このような現在地識別装置1によれば、特定された地域に対応する交通情報(例えば、最高速度情報や渋滞情報、走行車線の位置等の各種情報)を出力するので、車両のドライバの運転を支援することができる。
【0078】
また、現在地識別装置1において演算処理部10は、画像処理によらない手法で検出された自車両の位置の情報を、自車両の位置を検出した時刻の情報とともに取得し、地域を識別する際に、自車両の位置の情報と時刻の情報とを加味して地域を識別する。
【0079】
このような現在地識別装置1によれば、位置検出部15の精度向上や位置検出手段が利用できない場合の補完として利用することができる。
さらに、現在地識別装置1においては、複数回、車両が走行する地域を特定し、地域特定手段は、地域を特定する際に、そのときの時刻を記録し、過去における地域の特定結果と過去において地域を特定した時刻とを加味して地域を特定する。
【0080】
このような現在地識別装置1によれば、過去における地域の特定結果と過去において地域を特定した時刻とを加味して地域を特定するので、1回限り地域を識別する構成と比較して、地域の識別精度を向上させることができる。
【0081】
[その他の実施形態]
本発明の実施の形態は、上記の実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態を採りうる。
【0082】
例えば、上記実施形態においては、地域の特定結果に対応する交通情報を出力するようにしたが、地域に関連する情報を出力すれば、どのような情報を出力してもよい。例えば、特定された地域にて受信可能なテレビ・ラジオ等の放送を受信可能なようにチューニングを行うための出力や、地域のイベント情報等の出力を行うようにしてもよい。
【符号の説明】
【0083】
1…現在地識別装置、10…演算処理部、11…映像入力部、12…ユーザ入力部、13…映像出力部、14…音声出力部、15…位置検出部、16…通信部、20…データベース、30…外部記憶部、21…文字および記号の標準パターンDB、22…字体特徴量DB、23…地図DB、24…設定情報DB、32…字体特徴量DB、33…地図DB、34…設定情報DB。
【技術分野】
【0001】
本発明は、車両に搭載され、自車両が走行する地域を識別する地域識別装置、および地域識別プログラムに関する。
【背景技術】
【0002】
上記地域識別装置として、撮像画像中の標識と、データベース中の標識とをパターンマッチングすることで標識および標識が使用されている地域を特定する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−222485号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記地域識別装置では、標識の一部が汚れている場合や、擦れている場合、或いは、似たような標識を複数の異なる地域で利用している場合に、標識が使用されている地域を特定できない虞がある。また、標識から地域を特定する場合に限らず、自車両周囲の看板や路面に描かれている文字や記号等、自車両周囲に存在する文字や記号から地域を特定する構成においても同様の虞がある。
【0005】
そこで、このような問題点を鑑み、車両に搭載され、自車両が走行する地域を識別する地域識別装置、および地域識別プログラムにおいて、自車両周囲の文字や記号が使用されている地域を精度よく特定できる技術を提供することを本発明の目的とする。
【課題を解決するための手段】
【0006】
かかる目的を達成するために成された第1の構成の地域識別装置において、撮像画像取得手段は、自車両周囲の撮像画像を取得し、確度演算手段は、撮像画像に含まれる文字または記号を表す特定対象物を抽出し、複数の文字または記号が有するそれぞれの特徴と各文字または記号に対応する地域とを対応付けたデータベースを検索することによって、抽出した特定対象物がデータベース中の文字または記号である確度を演算する。そして、識別手段は、抽出した特定対象物において、前述の確度が最大となり、かつ基準となる確度以上となるデータベース中の文字または記号を選択し、この選択した文字または記号に対応する地域を前記データベースから抽出し、この抽出した地域を自車両が走行する地域として識別する。
【0007】
このような地域識別装置によれば、標識等の車外物の全体像でなく、撮像画像に含まれる特定対象物から地域を識別するので、全体像の一部に擦れ等、画像認識に不具合をもたらす事象が生じていたとしても、特定対象物を認識できれば、特定対象物が描かれた標識、道路ペイント等の車外物が使用されている地域を精度よく識別することができる。よって、自車両が走行する地域を精度よく識別することができる。
【0008】
なお、本発明でいう「複数の文字または記号」とは、文字および記号が合わせて複数であることを示し、文字のみ、或いは記号のみから構成されていてもよいし、文字と記号とを組み合わせて構成されていてもよい。また、「複数の文字または記号が有するそれぞれの特徴」とは、例えば、文字または記号が有する形状や配置等を示す。
【0009】
ところで、上記地域識別装置においては、第2の構成のように、確度演算手段は、撮像画像において、特定対象物が存在する領域を所定の複数の領域に分割し、この分割した各領域に特定対象物の特徴的形状が存在するか否かに応じて、抽出した特定対象物がデータベース中の各文字または記号である確度を演算するようにしてもよい。
【0010】
このような地域識別装置によれば、分割した領域毎に特徴的部分の有無を判断するので、特定対象物を特定する精度を向上させることができる。なお、本発明において「特徴的形状」とは、例えば、文字や記号における、はね、止め、はらい、線の途切れ、線の丸み、角の丸み、面取り等の形状を示す。
【0011】
また、上記地域識別装置においては、第3の構成のように、複数の文字または記号について、各文字または各記号を所定の複数の領域に分割し、分割した各領域に文字または記号の特徴的形状が存在するか否かに応じて各領域に対して点数付けを行ったデータベースを予め準備しておき、確度演算手段は、特定対象物に特徴的形状が存在するか否かに応じて各領域に対して点数付けを行い、各領域における点数の分布を、データベース内の各領域における点数の分布と比較することによって、抽出した特定対象物がデータベース中の各文字または記号である確度を演算するようにしてもよい。
【0012】
このような地域識別装置によれば、特定対象物がデータベース中に存在するか否かを点数によって求めるので、コンピュータによる処理に適した構成とすることができる。
さらに、上記地域識別装置においては、第4の構成のように、撮像画像から特定対象物を抽出する際の信頼度に関する情報を取得する信頼度取得手段と、取得した信頼度が低くなるにつれて、確度演算手段による確度が低くなるように補正する確度補正手段と、を備えていてもよい。
【0013】
このような地域識別装置によれば、撮像画像の信頼度に応じて確度を補正するので、信頼度が低い撮像画像における特定対象物に対して高確度で特定の文字や記号であると判断することを防止することができる。
【0014】
また、上記地域識別装置においては、第5の構成のように、特定対象物が表示される方向である表示方向を特定する表示方向特定手段と、撮像画像を撮像する際の方向である撮像方向と表示方向との相違に応じて撮像画像中の特定対象物の形状を補正する形状補正手段と、を備えていてもよい。
【0015】
すなわち、例えば道路標識のように、自車両の方向に文字等の特定対象物が向けられて表示されている場合(撮像方向と表示方向とが一致する場合)には、ほとんど特定対象物の形状を補正することなくデータベース中の文字や記号の形状と一致させることができるが、路上のペイントやビルの壁面に備えられた看板等のように、自車両の方向に文字等の特定対象物が向けられることなく表示されている場合(撮像方向と表示方向とが一致しない場合)には、形状に歪みが生じるため、データベース中の文字や記号の形状と一致させることができない場合がある。このため、本発明では、撮像方向と表示方向との相違に応じて撮像画像中の特定対象物の形状を補正するのである。
【0016】
このような地域識別装置によれば、撮像方向と表示方向とが一致しないことによって撮像画像中の特定対象物の形状に歪みが生じていたとしても、この特定対象物の形状を補正するので、データベース中の文字や記号であるかを確実に認識することができる。
【0017】
加えて、上記地域識別装置においては、第6の構成のように、形状補正手段は、特定対象物が存在する撮像画像中の位置に応じて各方向の相違を判断するようにしてもよい。例えば、撮像画像中において、道路の両端部の位置と無限遠点の位置が分かれば、道路の両端部の位置と無限遠点の位置とを結ぶ直線によって撮像画像中の領域を区分し、これらの直線の下側の領域については道路上のペイントとみなして表示方向を特定し、これらの直線の上側の領域については標識とみなして表示方向を特定するようにすればよい。
【0018】
このような地域識別装置によれば、特定対象物が存在する撮像画像中の位置に応じて特定対象物が表示される方向と撮像画像の撮像方向との相違の相違を判断するので、特定対象物が表示される方向を容易に特定することができる。
【0019】
また、上記地域識別装置においては、第7の構成のように、特定された地域に対応する情報を出力する出力手段を備えていてもよい。
このような地域識別装置によれば、地域を特定するだけでなく、特定した地域に対応する情報を出力することができる。
【0020】
さらに、上記地域識別装置においては、第8の構成のように、出力手段は、特定された地域に対応する交通情報を出力するようにしてもよい。
このような地域識別装置によれば、特定された地域に対応する交通情報(例えば、最高速度情報や渋滞情報、走行車線の位置等の各種情報)を出力するので、車両のドライバの運転操作を支援することができる。
【0021】
また、上記地域識別装置においては、第9の構成のように、画像処理によらない手法で検出された自車両の位置の情報を、自車両の位置を検出した時刻の情報とともに取得する位置情報取得手段を備え、地域識別手段は、地域を識別する際に、自車両の位置の情報と時刻の情報とを加味して地域を識別するようにしてもよい。
【0022】
このような地域識別装置によれば、本発明の地域識別装置を、位置検出手段の精度向上や位置検出手段が利用できない場合の補完として利用することができる。
さらに、上記地域識別装置においては、第10の構成のように、地域識別装置は、複数回、車両が走行する地域を特定し、地域特定手段は、地域を特定する際に、そのときの時刻を記録し、過去における地域の特定結果と過去において地域を特定した時刻とを加味して地域を特定するようにしてもよい。
【0023】
このような地域識別装置によれば、過去における地域の特定結果と過去において地域を特定した時刻とを加味して地域を特定するので、1回限り地域を識別する構成と比較して、地域の識別精度を向上させることができる。
【0024】
次に、上記目的を達成するために成された第11の構成としての地域識別プログラムは、コンピュータを、上記何れか1項に記載の地域識別装置における各手段として機能させるためのプログラムであることを特徴とする。
【0025】
このような地域識別プログラムによれば、少なくとも請求項1に記載の地域識別装置と同様の効果を享受することができる。
【図面の簡単な説明】
【0026】
【図1】現在地識別装置1の概略構成を示すブロック図である。
【図2】地域特定処理を示すフローチャートである。
【図3】特定対象物抽出処理を示すフローチャートである。
【図4】対象物の表示方向を示す前方画像である。
【図5】字体特徴量を示す説明図である。
【図6】識別処理を示すフローチャートである。
【図7】字体の違いを示す説明図である。
【図8】交通情報の出力例を示す説明図である。
【発明を実施するための形態】
【0027】
以下に本発明にかかる実施の形態を図面と共に説明する。
[本実施形態の構成]
図1は、本発明が適用された現在地識別装置1(地域識別装置)の概略構成を示すブロック図である。現在地識別装置1は、車両に搭載され、自車両(現在地識別装置1が搭載された車両)が走行する地域(国、州、県等の行政区分や地方)を識別する機能を有し、周知のカーナビゲーションとしての機能も備えている。
【0028】
詳細には、図1に示すように、現在地識別装置1は、演算処理部10と、映像入力部11と、ユーザ入力部12と、映像出力部13と、音声出力部14と、位置検出部15と、通信部16と、データベース(DB)20と、外部記憶部30とを備えている。
【0029】
演算処理部10は、CPU、ROM、RAM等を備えた周知のマイコンとして構成されており、ROMに格納されたプログラム(地域識別プログラムを含む)や、RAMにロードされたプログラム等のデータ、或いは、外部から当該演算処理部10に入力されるデータに基づく各種処理を実施する。
【0030】
映像入力部11は、周知のカメラとして構成されており、自車両の天井付近に自車両の前方領域を撮像可能に配置されている。この映像入力部11は、例えば100ms毎に前方領域を撮像し、得られた撮像画像を演算処理部10に送る。
【0031】
ユーザ入力部12は、車両の運転者等のユーザが現在地識別装置1に対する指令を入力するためのボタンやタッチパネル等のユーザインタフェースとして構成されている。映像出力部13は、周知のディスプレイとして構成されている。
【0032】
音声出力部14は、周知のスピーカとして構成されており、演算処理部10による指令に応じて音(音声を含む)を出力する。位置検出部15は、人工衛星から送信される電波やマップマッチング等を利用した処理を行うことで、自車両が存在する位置を検出し、演算処理部10は、位置検出部15からこの位置の検出結果を必要に応じて取得する(位置情報取得手段)。
【0033】
通信部16は、車両内の他の装置や、車両外部の装置と通信するための通信インタフェースとして構成されている。データベース(DB)20は、文字および記号の標準パターンDB21と、字体特徴量DB22と、地図DB23と、設定情報DB24とを備えている。
【0034】
文字および記号の標準パターンDB21は、一般的な文字や記号の形状に関する情報が含まれており、撮像画像中に含まれる対象物と、この情報とをパターンマッチング等することによって、撮像画像中に文字や記号が含まれているかどうかを検出することができるよう設定されている。このDB21においては、撮像画像中に文字や記号が含まれているかどうかを検出できればよいため、1つの文字や記号について、1乃至2程度の形状に関する情報を備えていればよい。
【0035】
字体特徴量DB22は、複数の文字または記号について、各文字または各記号を所定の複数の領域に分割し、分割した各領域に文字または記号の特徴的形状が存在するか否かに応じて各領域に対して点数(「1」または「0」)付けを行った情報を備えており、複数の文字または記号に対して、各文字または記号に対応する地域が対応付けられている。このDB22においては、1つの文字や記号について、利用されている地域の種類の数に応じて複数の点数付けを行った情報が備えられている。
【0036】
また、本実施形態でいう特徴的形状とは、例えば、文字や記号における、はね、止め、はらい、線の途切れ、線の丸み、角の丸み、面取り等の形状等を示し、これらの形状が分割した各領域に存在するか否かに応じて、点数が付されている。また、字体特徴量DB22には、文字または記号を構成する線の太さの情報も含まれている。
【0037】
地図DB23は、緯度経度の情報が対応付けられた周知のデジタルマップを備えている。設定情報DB24は、現在地識別装置1の作動状態や現在時刻の情報、或いは過去において検出された現在地の情報等が記録される。
【0038】
外部記憶部30は、例えばフラッシュメモリ等の着脱自在な記録装置として構成されている。この外部記憶部30内には、文字および記号の標準パターンDB31と、字体特徴量DB32と、地図DB33と、設定情報DB34とが備えられている。外部記憶部30内のデータは、基本的には、データベース20の内容と同様であり、この外部記憶部30はデータベース20のバックアップとして利用される。なお、外部記憶部30の内のデータが更新されると、データベース20内のデータを更新するようにしてもよく、このようにすれば、外部記憶部30を利用してデータベース20内のデータを更新することができる。
【0039】
[本実施形態の処理]
次に上記の現在地識別装置1において実行される地域を識別する処理について図2以下の図面を用いて説明する。図2は演算処理部10が実行する地域特定処理を示すフローチャート、図3は地域特定処理のうちの特定対象物抽出処理を示すフローチャートである。また、図6は地域特定処理のうちの識別処理を示すフローチャートである。
【0040】
なお、本処理において、S120〜S140、S410〜S430の処理は本発明でいう確度演算手段に相当し、S450〜S480の処理は識別手段に相当する。
地域特定処理は、例えば、位置検出部15によって位置を検出できない場合に開始され、その後、位置検出部15によって位置を検出できない状態が解消するまで、撮像画像が得られる周期で(例えば100ms毎に)繰り返し実施される処理である。詳細には、まず、自車両周囲の撮像画像を映像入力部11から取得する(S110:撮像画像取得手段)。
【0041】
そして、特定対象物抽出処理を実施する(S120)。特定対象物抽出処理は、撮像画像から文字または記号を表す特定対象物を抽出する処理である。
詳細には、図3に示すように、まず、撮像画像中に存在する単語や文章、或いはその他の対象物を1つずつ抽出する(S210)。この処理では、撮像画像中のエッジ成分を抽出し、各エッジ成分の位置に基づき周知の文字認識のアルゴリズムを利用して、各文字や記号、或いはその他の対象物が占める領域を特定し、対象物の1つ1つを識別して抽出する。
【0042】
そして、各対象物までの距離を検出する(S220:信頼度取得手段)。対象物までの距離は、例えばレーダ装置等の距離検出装置を備えている場合には、この距離検出装置によって検出すればよい。また、距離検出装置を備えていない場合には、撮像画像中の対象物の位置や大きさに応じて対象物までの距離を特定する。
【0043】
続いて、撮像画像の信頼度を設定する(S230:確度補正手段)。この処理では、対象物までの距離が遠くなるにつれて撮像画像中の対象物が小さくなり、判別が困難になるため、対象物までの距離が遠くなるにつれて信頼度を低く設定する。なお、この処理で設定される信頼度は、対象物が文字等の特定対象物である確度を算出する際に利用され、信頼度が低くなるにつれて、対象物が特定対象物である確度が低く設定される。
【0044】
次に、対象物が文字や記号等の特定対象物であると仮定した場合、この対象物が表示されている方向を検出する(S240:表示方向特定手段)。この処理では、例えば、図3(a)に示すように、撮像画像中の無限遠点の位置(無限遠点の位置は、予め設定された位置や、白線の位置から推定される。)から、撮像画像の領域を、路側物や看板が配置されている可能性が高い領域(図3(a)の破線よりも上側の領域)と、路面のペイントが配置されている可能性が高い領域(図3(a)の破線よりも下側の領域)とに分け、対象物が何れの領域に属しているかに応じて、対象物が表示されている方向を特定する。
【0045】
なお、レーダ装置やソナー装置を備えている場合には、対象物による反射波のレベルに応じて対象物が表示されている方向を特定してもよい。つまり、対象物が表示されている方向(反射面)が撮像方向(送信波の送信方向)と一致している場合には、反射波のレベルが高く、対象物が表示されている方向と撮像方向との相違が大きくなるにつれて反射波のレベルが小さくなる性質を利用すればよい。
【0046】
続いて、対象物の大きさ、および形状を画像中の位置(対象物が表示されている方向)に応じて規定の形状に正規化する(S250:形状補正手段)。この処理では、例えば、自車両側に向けて表示された標識に「S」の文字が描かれていた場合には、図3(b)右図に示すように正面から撮像されるため、表示方向による歪みを補正する必要はない。
【0047】
一方で、例えば図3(b)左図に示すように、路面に「S」という文字が描かれていた場合には、手前側に描かれている部分の幅が広く、遠方側に描かれている部分の幅が狭く見える。このため、対象物の形状を図3(b)右図に示すようなバランスのよい形状(対象物を表示方向(真上)から見たときの形状)に補正する。
【0048】
また、縦長の対象物や、横長の対象物についても正規化する。つまり、認識するにあたって適切なバランス(縦横比)となるように形状を補正する。
そして、各対象物について、対象物が存在する領域を細かな区画に分割する(S310)。この処理では、例えば、図5(a)に示すように、1つの対象物を、縦方向および横方向に3等分することで9等分する。
【0049】
続いて、対象物において分割した各区画における形状と、予め文字および記号の標準パターンDB21に準備された標準的な文字や記号のパターンにおける各区画の形状とを比較し、一致度(確度)を算出する(S320)。この処理では、分割した区画毎に周知のパターンマッチング等の処理を行えばよい。
【0050】
そして、一致度に基づいて、対象物が文字等の特定対象物であるか否かを判定する(S330)。この処理では、対象物がある特定対象物である確度が一定以上(例えば70%以上)であると判定されると、その特定対象物であると判定される。また、確度が一定未満であれば、この対象物は特定対象物ではない物体と判定される。
【0051】
このような特定対象物抽出処理が終了すると、図2に戻り、撮像画像中に特定対象物が含まれているか否かを判定する(S130)。撮像画像中に特定対象物が含まれていなければ(S130:NO)、地域特定処理を終了する。
【0052】
また、撮像画像中に特定対象物が含まれていれば(S130:YES)、字体特徴量を抽出する(S140)。字体特徴量の抽出では、抽出された特定対象物毎に、分割された各領域に、この分割した各領域に特定対象物の特徴的形状が存在するか否かを判定し、この結果に応じて、各領域に点数(スコア)付けを行う。本実施形態では、特徴的形状が存在すれば、その領域に「1」を付し、特徴的形状が存在しなければ、その領域に「0」を付すことで点数付けを行う。
【0053】
字体特徴量としては、例えば、文字や記号における、はね、止め、はらい、線の途切れ、線の丸み、角の丸み、面取り等の形状等が挙げられる。例えば、文字「S」について、「止め」の位置の有無を判定した場合には、図5(a)に示すように、字体によって「止め」の位置が異なることが分かる。このように、この処理では、「止め」や「はね」等の複数の字体特徴量の有無を検出する。
【0054】
続いて、識別処理を実施する(S150)。この識別処理は、特定対象物の字体特徴量とデータベース中の文字または記号が有する字体特徴量とを比較することによって、特定対象物がデータベース中の何れかの文字または記号に該当するかを検出し、地域を特定する処理である。例えば、図7(a)、図7(b)に示すように、異なる地域において路上に「STOP」と描かれている場合があるが、地域によってその字体が異なる場合があるため、本処理では、この字体の違いを検出することで、地域を特定する。
【0055】
詳細には、図6に示すように、まず、特定対象物の媒体種別を認識する(S410)。ここで、媒体種別とは、例えば、道路標識、ペイント等の道路標示、広告、観光案内看板、交通事故防止等の啓発用看板等が挙げられる。媒体種別を認識するには、S240の処理で説明したように、路上のペイントであるか否かを識別し、その後、画像中の位置や文字の大きさ、或いは配列等に応じて詳細に種別を識別するようにすればよい。
【0056】
続いて、正規化済みの特定対象物について、字体特徴量DB22に含まれる文字または記号の太さの情報と特定対象物を構成する線の太さとを比較することで、一致度のスコアを算出する(S420)。そして、特定対象物の局所的特徴(つまり、分割された領域毎の特徴的形状の有無)に従って、一致度のスコアを算出する(S430)。
【0057】
続いて、各一致度のスコアを考慮した総合的なスコアを算出する(S440)。この処理の際には、S230の処理で設定された信頼度が低くなるにつれてスコアを低く設定する。例えば、信頼度を考慮しない場合に100点が付される場合であっても、信頼度を考慮すると80点や60点等に減点される場合があり得る。
【0058】
そして、最もスコアが高い文字または記号に対応する地域を字体特徴量DB22から抽出し、この地域を自車両が走行する地域として仮決定する(S450)。次に、フィルタリングによるスコア補正を行う(S460)。
【0059】
この処理では、過去において、位置検出部15や地域特定処理で得られた地域の検出結果を設定情報DB24から取得し、この検出結果を考慮してスコア補正を行う。例えば、近い過去における地域の検出結果が10回連続して日本の愛知県であった場合、1回のみイギリスのある地域と判定されたとしても、このイギリスとの判定結果は信頼性が低いものとしてスコアを低く設定する。つまり、過去における位置の検出結果とその位置を検出した時刻とを考慮したローパスフィルタを設定し、位置の検出結果が急激に変化しないようにすればよい。
【0060】
続いて、スコアが所定の閾値以上(例えば満点の4割以上)となる地域が存在するか否かを判定する(S470)。スコアが閾値以上となる地域が存在すれば(S470:YES)、スコア(確度)が最大となる地域を現在時刻における地域として確定し(S480)、識別処理を終了する。
【0061】
この処理では、例えば図5(b)に示すように、自車両が特定対象物から遠い状態(時刻T1、T2の状態)では、スコア(現在地属性認識信頼度)が低いため、地域の出力(装置からの出力)がされないが、自車両が特定対象物から近い状態(時刻T3の状態)では、スコアが高くなり、地域(ドイツである旨)の出力がされる。
【0062】
また、スコアが閾値以上となる地域が存在しなければ(S470:NO)、直ちに識別処理を終了する。なお、S170の処理の際には、確定された地域と、地域が確定された時刻の情報とを設定情報DB24に記録させる。
【0063】
このような識別処理が終了すると、図2に戻り、識別処理にて地域が確定されたか否かを判定する(S160)。地域が確定されていれば(S160:YES)、確定された地域を出力し(S170:出力手段)、地域特定処理を終了する。
【0064】
なお、S170の処理において、地域を出力すると、別途交通情報を出力する処理が実施され、例えば、この地域の法定速度の情報等の交通情報が映像出力部13や音声出力部14を介して出力される。例えば、特定された地域がフランスのある地域である場合には、図8(a)に示すように、法定速度の情報として、一般道90km/h、高速道路等の専用道130km/hと出力される。
【0065】
また、特定された地域がオランダのある地域である場合には、図8(b)に示すように、法定速度の情報として、一般道80km/h、高速道路等の専用道120km/hと出力される。また、地域が確定されていなければ(S160:NO)、直ちに地域特定処理を終了する。
【0066】
[本実施形態による効果]
以上のように詳述した現在地識別装置1において、演算処理部10は、自車両周囲の撮像画像を取得し、撮像画像に含まれる文字または記号を表す特定対象物を抽出し、複数の文字または記号が有するそれぞれの特徴(文字または記号が有する形状や配置等)と各文字または記号に対応する地域とを対応付けたデータベースを検索することによって、抽出した特定対象物がデータベース中の文字または記号である確度を演算する。そして、演算処理部10は、抽出した特定対象物において、前述の確度が最大となり、かつ基準となる確度以上となるデータベース中の文字または記号を選択し、この選択した文字または記号に対応する地域をデータベースから抽出し、この抽出した地域を自車両が走行する地域として識別する。
【0067】
このような現在地識別装置1によれば、標識等の車外物の全体像でなく、撮像画像に含まれる特定対象物から地域を識別するので、全体像の一部に擦れ等、画像認識に不具合をもたらす事象が生じていたとしても、特定対象物が描かれた標識、道路ペイント等の車外物が使用されている地域を精度よく識別することができる。よって、自車両が走行する地域を精度よく識別することができる。
【0068】
また、現在地識別装置1において演算処理部10は、撮像画像において、特定対象物が存在する領域を所定の複数の領域に分割し、この分割した各領域に特定対象物の特徴的形状(例えば、文字や記号における、はね、止め、はらい、線の途切れ、線の丸み、角の丸み、面取り等の形状)が存在するか否かに応じて、抽出した特定対象物がデータベース中の各文字または記号である確度を演算する。
【0069】
このような現在地識別装置1によれば、分割した領域毎に特徴的部分の有無を判断するので、特定対象物を特定する精度を向上させることができる。
また、現在地識別装置1においては、複数の文字または記号について、各文字または各記号を所定の複数の領域に分割し、分割した各領域に文字または記号の特徴的形状が存在するか否かに応じて各領域に対して点数付けを行ったデータベースを予め準備しており、演算処理部10は、特定対象物に特徴的形状が存在するか否かに応じて各領域に対して点数付けを行い、各領域における点数の分布を、データベース内の各領域における点数の分布と比較することによって、抽出した特定対象物がデータベース中の各文字または記号である確度を演算する。
【0070】
このような現在地識別装置1によれば、特定対象物がデータベース中に存在するか否かを点数によって求めるので、コンピュータによる処理に適した構成とすることができる。
さらに、現在地識別装置1において演算処理部10は、撮像画像から特定対象物を抽出する際の信頼度に関する情報を取得し、取得した信頼度が低くなるにつれて、特定対象物が文字または記号である確度が低くなるように補正する。
【0071】
このような現在地識別装置1によれば、撮像画像の信頼度に応じて確度を補正するので、信頼度が低い撮像画像における特定対象物に対して高確度で特定の文字や記号であると判断することを防止することができる。
【0072】
また、現在地識別装置1において演算処理部10は、特定対象物が表示される方向である表示方向を特定し、撮像画像を撮像する際の方向である撮像方向と表示方向との相違に応じて撮像画像中の特定対象物の形状を補正する。
【0073】
すなわち、例えば道路標識のように、自車両の方向に文字等の特定対象物が向けられて表示されている場合(撮像方向と表示方向とが一致する場合)には、ほとんど特定対象物の形状を補正することなくデータベース中の文字や記号の形状と一致させることができるが、路上のペイントやビルの壁面に備えられた看板等のように、自車両の方向に文字等の特定対象物が向けられることなく表示されている場合(撮像方向と表示方向とが一致しない場合)には、データベース中の文字や記号の形状と一致させることができない場合がある。このため、本発明では、撮像方向と表示方向との相違に応じて撮像画像中の特定対象物の形状を補正する。
【0074】
このような現在地識別装置1によれば、撮像方向と表示方向とが一致しないことによって撮像画像中の特定対象物の形状に歪みが生じていたとしても、この特定対象物の形状を補正するので、データベース中の文字や記号であるかを確実に認識することができる。
【0075】
加えて、現在地識別装置1において演算処理部10は、特定対象物が存在する撮像画像中の位置に応じて各方向の相違を判断する。
このような現在地識別装置1によれば、特定対象物が存在する撮像画像中の位置に応じて特定対象物が表示される方向と撮像画像の撮像方向との相違の相違を判断するので、特定対象物が表示される方向を容易に特定することができる。
【0076】
また、現在地識別装置1において演算処理部10は、特定された地域に対応する情報を出力する。
このような現在地識別装置1によれば、地域を特定するだけでなく、特定した地域に対応する情報を出力することができる。
【0077】
さらに、現在地識別装置1において演算処理部10は、特定された地域に対応する交通情報を出力する。
このような現在地識別装置1によれば、特定された地域に対応する交通情報(例えば、最高速度情報や渋滞情報、走行車線の位置等の各種情報)を出力するので、車両のドライバの運転を支援することができる。
【0078】
また、現在地識別装置1において演算処理部10は、画像処理によらない手法で検出された自車両の位置の情報を、自車両の位置を検出した時刻の情報とともに取得し、地域を識別する際に、自車両の位置の情報と時刻の情報とを加味して地域を識別する。
【0079】
このような現在地識別装置1によれば、位置検出部15の精度向上や位置検出手段が利用できない場合の補完として利用することができる。
さらに、現在地識別装置1においては、複数回、車両が走行する地域を特定し、地域特定手段は、地域を特定する際に、そのときの時刻を記録し、過去における地域の特定結果と過去において地域を特定した時刻とを加味して地域を特定する。
【0080】
このような現在地識別装置1によれば、過去における地域の特定結果と過去において地域を特定した時刻とを加味して地域を特定するので、1回限り地域を識別する構成と比較して、地域の識別精度を向上させることができる。
【0081】
[その他の実施形態]
本発明の実施の形態は、上記の実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態を採りうる。
【0082】
例えば、上記実施形態においては、地域の特定結果に対応する交通情報を出力するようにしたが、地域に関連する情報を出力すれば、どのような情報を出力してもよい。例えば、特定された地域にて受信可能なテレビ・ラジオ等の放送を受信可能なようにチューニングを行うための出力や、地域のイベント情報等の出力を行うようにしてもよい。
【符号の説明】
【0083】
1…現在地識別装置、10…演算処理部、11…映像入力部、12…ユーザ入力部、13…映像出力部、14…音声出力部、15…位置検出部、16…通信部、20…データベース、30…外部記憶部、21…文字および記号の標準パターンDB、22…字体特徴量DB、23…地図DB、24…設定情報DB、32…字体特徴量DB、33…地図DB、34…設定情報DB。
【特許請求の範囲】
【請求項1】
車両に搭載され、自車両が走行する地域を識別する地域識別装置であって、
自車両周囲の撮像画像を取得する撮像画像取得手段と、
前記撮像画像に含まれる文字または記号を表す特定対象物を抽出し、複数の文字または記号が有するそれぞれの特徴と各文字または記号に対応する地域とを対応付けたデータベースを検索することによって、前記抽出した特定対象物が前記データベース中の文字または記号である確度を演算する確度演算手段と、
前記抽出した特定対象物において、前記確度が最大となり、かつ基準となる確度以上となるデータベース中の文字または記号を選択し、該選択した文字または記号に対応する地域を前記データベースから抽出し、該抽出した地域を自車両が走行する地域として識別する識別手段と、
を備えたことを特徴とする地域識別装置。
【請求項2】
請求項1に記載の地域識別装置において、
前記確度演算手段は、前記撮像画像において、前記特定対象物が存在する領域を所定の複数の領域に分割し、該分割した各領域に特定対象物の特徴的形状が存在するか否かに応じて、前記抽出した特定対象物が前記データベース中の各文字または記号である確度を演算すること
を特徴とする地域識別装置。
【請求項3】
請求項2に記載の地域識別装置において、
複数の文字または記号について、各文字または各記号を所定の複数の領域に分割し、分割した各領域に文字または記号の特徴的形状が存在するか否かに応じて各領域に対して点数付けを行ったデータベースを予め準備しておき、
前記確度演算手段は、前記特定対象物に特徴的形状が存在するか否かに応じて各領域に対して点数付けを行い、各領域における点数の分布を、前記データベース内の各領域における点数の分布と比較することによって、前記抽出した特定対象物が前記データベース中の各文字または記号である確度を演算すること
を特徴とする地域識別装置。
【請求項4】
請求項1〜請求項3の何れか1項に記載の地域識別装置において、
前記撮像画像から特定対象物を抽出する際の信頼度に関する情報を取得する信頼度取得手段と、
前記取得した信頼度が低くなるにつれて、前記確度演算手段による確度が低くなるように補正する確度補正手段と、
を備えたことを特徴とする地域識別装置。
【請求項5】
請求項1〜請求項4の何れか1項に記載の地域識別装置において、
前記特定対象物が表示される方向である表示方向を特定する表示方向特定手段と、
前記撮像画像を撮像する際の方向である撮像方向と前記表示方向との相違に応じて前記撮像画像中の特定対象物の形状を補正する形状補正手段と、
を備えたことを特徴とする地域識別装置。
【請求項6】
請求項5に記載の地域識別装置において、
前記形状補正手段は、前記特定対象物が存在する撮像画像中の位置に応じて前記各方向の相違を判断すること
を特徴とする地域識別装置。
【請求項7】
請求項1〜請求項6の何れか1項に記載の地域識別装置において、
前記特定された地域に対応する情報を出力する出力手段を備えたこと
を特徴とする地域識別装置。
【請求項8】
請求項7に記載の地域識別装置において、
前記出力手段は、前記特定された地域に対応する交通情報を出力すること
を特徴とする地域識別装置。
【請求項9】
請求項1〜請求項8の何れか1項に記載の地域識別装置において、
画像処理によらない手法で検出された自車両の位置の情報を、自車両の位置を検出した時刻の情報とともに取得する位置情報取得手段を備え、
前記地域識別手段は、地域を識別する際に、前記自車両の位置の情報と前記時刻の情報とを加味して地域を識別すること
を特徴とする地域識別装置。
【請求項10】
請求項1〜請求項9の何れか1項に記載の地域識別装置において、
当該地域識別装置は、複数回、車両が走行する地域を特定し、
前記地域特定手段は、地域を特定する際に、そのときの時刻を記録し、過去における地域の特定結果と過去において地域を特定した時刻とを加味して地域を特定すること
を特徴とする地域識別装置。
【請求項11】
コンピュータを、請求項1〜請求項10の何れか1項に記載の地域識別装置における各手段として機能させるための地域識別プログラム。
【請求項1】
車両に搭載され、自車両が走行する地域を識別する地域識別装置であって、
自車両周囲の撮像画像を取得する撮像画像取得手段と、
前記撮像画像に含まれる文字または記号を表す特定対象物を抽出し、複数の文字または記号が有するそれぞれの特徴と各文字または記号に対応する地域とを対応付けたデータベースを検索することによって、前記抽出した特定対象物が前記データベース中の文字または記号である確度を演算する確度演算手段と、
前記抽出した特定対象物において、前記確度が最大となり、かつ基準となる確度以上となるデータベース中の文字または記号を選択し、該選択した文字または記号に対応する地域を前記データベースから抽出し、該抽出した地域を自車両が走行する地域として識別する識別手段と、
を備えたことを特徴とする地域識別装置。
【請求項2】
請求項1に記載の地域識別装置において、
前記確度演算手段は、前記撮像画像において、前記特定対象物が存在する領域を所定の複数の領域に分割し、該分割した各領域に特定対象物の特徴的形状が存在するか否かに応じて、前記抽出した特定対象物が前記データベース中の各文字または記号である確度を演算すること
を特徴とする地域識別装置。
【請求項3】
請求項2に記載の地域識別装置において、
複数の文字または記号について、各文字または各記号を所定の複数の領域に分割し、分割した各領域に文字または記号の特徴的形状が存在するか否かに応じて各領域に対して点数付けを行ったデータベースを予め準備しておき、
前記確度演算手段は、前記特定対象物に特徴的形状が存在するか否かに応じて各領域に対して点数付けを行い、各領域における点数の分布を、前記データベース内の各領域における点数の分布と比較することによって、前記抽出した特定対象物が前記データベース中の各文字または記号である確度を演算すること
を特徴とする地域識別装置。
【請求項4】
請求項1〜請求項3の何れか1項に記載の地域識別装置において、
前記撮像画像から特定対象物を抽出する際の信頼度に関する情報を取得する信頼度取得手段と、
前記取得した信頼度が低くなるにつれて、前記確度演算手段による確度が低くなるように補正する確度補正手段と、
を備えたことを特徴とする地域識別装置。
【請求項5】
請求項1〜請求項4の何れか1項に記載の地域識別装置において、
前記特定対象物が表示される方向である表示方向を特定する表示方向特定手段と、
前記撮像画像を撮像する際の方向である撮像方向と前記表示方向との相違に応じて前記撮像画像中の特定対象物の形状を補正する形状補正手段と、
を備えたことを特徴とする地域識別装置。
【請求項6】
請求項5に記載の地域識別装置において、
前記形状補正手段は、前記特定対象物が存在する撮像画像中の位置に応じて前記各方向の相違を判断すること
を特徴とする地域識別装置。
【請求項7】
請求項1〜請求項6の何れか1項に記載の地域識別装置において、
前記特定された地域に対応する情報を出力する出力手段を備えたこと
を特徴とする地域識別装置。
【請求項8】
請求項7に記載の地域識別装置において、
前記出力手段は、前記特定された地域に対応する交通情報を出力すること
を特徴とする地域識別装置。
【請求項9】
請求項1〜請求項8の何れか1項に記載の地域識別装置において、
画像処理によらない手法で検出された自車両の位置の情報を、自車両の位置を検出した時刻の情報とともに取得する位置情報取得手段を備え、
前記地域識別手段は、地域を識別する際に、前記自車両の位置の情報と前記時刻の情報とを加味して地域を識別すること
を特徴とする地域識別装置。
【請求項10】
請求項1〜請求項9の何れか1項に記載の地域識別装置において、
当該地域識別装置は、複数回、車両が走行する地域を特定し、
前記地域特定手段は、地域を特定する際に、そのときの時刻を記録し、過去における地域の特定結果と過去において地域を特定した時刻とを加味して地域を特定すること
を特徴とする地域識別装置。
【請求項11】
コンピュータを、請求項1〜請求項10の何れか1項に記載の地域識別装置における各手段として機能させるための地域識別プログラム。
【図1】


【図2】
【図3】
【図4】
【図6】

【図7】
【図5】
【図8】
【図2】
【図3】
【図4】
【図6】
【図7】
【図5】
【図8】
【公開番号】特開2012−189511(P2012−189511A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−54678(P2011−54678)
【出願日】平成23年3月11日(2011.3.11)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月11日(2011.3.11)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]