
地山掘削機の位置検出システム及びそのシステムを備えた地山掘削機
【課題】既設トンネルと地山掘削機との位置関係にかかわらず、かつ、既設トンネルに発信器を取り付けることなく、既設トンネルとの距離を測定可能な地山掘削機の位置検出システム及びそのシステムを備えた地山掘削機を提供する。
【解決手段】位置検出システム2は、地山掘削機1の外殻1aに取り付けられて、既設トンネル3までの距離を測定可能な距離センサー10〜13と、既設トンネル3の内周面に取り付けられて、既設トンネル3の外殻3a及び地山を透過可能な信号を発信する発信器20〜27と、地山掘削機1の外殻1aに取り付けられて、発信器20〜27から発信された信号を受信可能な受信器30〜33と、を備えている。
【解決手段】位置検出システム2は、地山掘削機1の外殻1aに取り付けられて、既設トンネル3までの距離を測定可能な距離センサー10〜13と、既設トンネル3の内周面に取り付けられて、既設トンネル3の外殻3a及び地山を透過可能な信号を発信する発信器20〜27と、地山掘削機1の外殻1aに取り付けられて、発信器20〜27から発信された信号を受信可能な受信器30〜33と、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、既設トンネルに近接するトンネルを構築する際に、既設トンネルを基準とした、上記トンネルを掘削する地山掘削機の位置を検出する位置検出システム及びそのシステムを備えた地山掘削機に関する。
【背景技術】
【0002】
既設トンネルに近接するトンネルを構築する際は、このトンネルを掘削するための地山掘削機と既設トンネルとの位置関係を正確に把握する必要がある。
そこで、従来より、例えば、特許文献1に示すように、既設トンネルの地山掘削機側の外側面に発信器を、地山掘削機の既設トンネル側の側部に受信器をそれぞれ設置して、発信器から発信された信号を受信器で受信することにより、両者間の距離を測定しながらトンネルを掘削する工法が用いられている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平9−242470号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されている測定方法では、既設トンネルに設置された発信器に対向する側方位置に地山掘削機の受信部が存在しないと両者間の距離を測定することができないという問題点があった。
【0005】
そこで、本発明は、上記の問題に鑑みなされたものであり、既設トンネルに発信器を取り付けることなく、既設トンネルと地山掘削機との間の距離を測定可能な地山掘削機の位置検出システム及びそのシステムを備えた地山掘削機を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、既設トンネルに近接するトンネルを構築する際に、前記既設トンネルを基準とした、前記トンネルを掘削するための地山掘削機の位置を検出する地山掘削機の位置検出システムであって、
前記既設トンネルに向かって発信する所定の信号に起因して、前記既設トンネルまでの距離に応じて生じる信号を受信し、前記既設トンネルまでの距離を測定可能な距離センサーを備えることを特徴とする。
【0007】
また、本発明において、前記距離センサーは、進行方向に沿って所定の間隔をおいて複数配置されていることしてもよい。
【0008】
また、本発明において、前記距離センサーは、進行方向に対して直交する向きに沿って所定の間隔をおいて複数配置されていることとしてもよい。
【0009】
本発明は地山掘削機であって、上述した地山掘削機の位置検出システムを備えることを特徴とする。
【発明の効果】
【0010】
本発明によれば、既設トンネルに発信器を取り付けることなく、既設トンネルとの距離を測定可能な地山掘削機の位置検出システム及びそのシステムを備えた地山掘削機を提供することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の第一実施形態に係る既設トンネルと新設トンネルとの位置関係を示す平面図である。
【図2】既設トンネルの外殻部分と地山掘削機とを拡大して示す平面図である。
【図3】図2のA矢視図である。
【図4】既設トンネルまでの距離の測定方法を示す図である。
【図5】ヨーイングの測定方法を示す図である。
【図6】ローリングの測定方法を示す図である。
【図7】図2のB矢視図である。
【図8】γ線による測定方法を示す図である。
【図9】第1基準線に対する第2基準線のずれ量を検出する方法を示す図である。
【図10】第1基準線に対する第2基準線のずれを説明するための図である。
【図11】本発明の第二実施形態に係る既設トンネルと新設トンネルとの位置関係を示す断面図である。
【図12】発信器及び受信器を設置した状態を示す概念図である。
【発明を実施するための形態】
【0012】
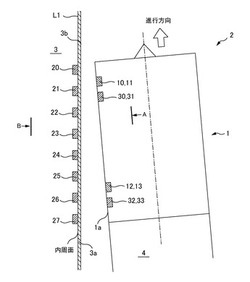
以下、本発明の地山掘削機1の位置検出システム2の好ましい実施形態について図面を用いて詳細に説明する。本発明の地山掘削機1の位置検出システム2は、既設トンネル3に対する地山掘削機1の位置及び姿勢を検出するものである。なお、本実施形態では、地山掘削機1として、シールド機を用いる場合について説明するが、これに限定されるものではなく、トンネルを掘削可能な機械であれば本発明を適用可能である。
【0013】
本発明の第一実施形態では、既設トンネル3の分岐・合流部の構築に際して、既設トンネル3に向かって側方から近接するように新設トンネル4を構築する場合について説明する。なお、本実施形態においては、既設トンネル3及び新設トンネル4はともに、矩形断面のトンネルとした場合について説明するが、この形状に限定されるものではなく、断面が真円状や楕円状のトンネルであってもよい。
【0014】
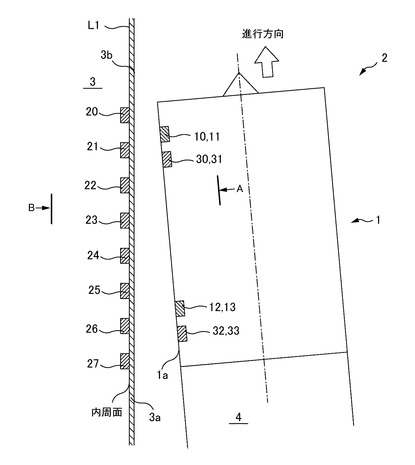
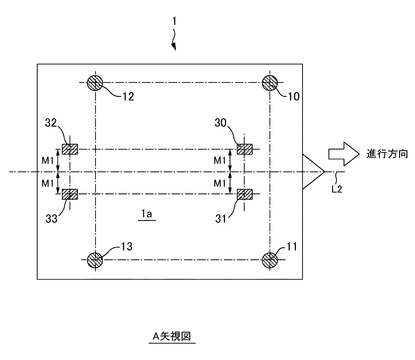
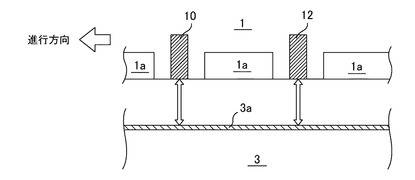
図1は、本発明の第一実施形態に係る既設トンネル3と新設トンネル4との位置関係を示す平面図である。また、図2は、既設トンネル3の外殻3a部分と地山掘削機1とを拡大して示す平面図である。また、図3は、図2のA矢視図である。
【0015】
これらの図に示すように、位置検出システム2は、地山掘削機1の外殻1aに取り付けられて、既設トンネル3までの距離を測定可能な距離センサー10〜13と、既設トンネル3の内周面に取り付けられて、既設トンネル3の外殻3a及び地山を透過可能な信号を発信する発信器20〜27と、地山掘削機1の外殻1aに取り付けられて、発信器20〜27から発信された信号を受信可能な受信器30〜33と、を備えている。
【0016】
距離センサー10〜13は、地山掘削機1の既設トンネル3側の側面(図2では左側の側面。以下、地山掘削機1のトンネル側側面という)に複数設置されている。本実施形態では、既設トンネル3の外殻3aは鋼製セグメント及びコンクリート等で構成されているものとし、距離センサー10〜13として、金属面を測定対象とする渦電流式センサーを用いた。
なお、外殻3aを構成するセグメントがRCセグメントである等、外殻3aが金属材を含んでいない場合は、既設トンネル3の外殻3aの側面を覆うように鋼板を設置するものとする。
【0017】
図3に示すように、距離センサー10と12、及び距離センサー11と13は、進行方向(図3中では左右方向)に沿って所定の間隔をおいてそれぞれ配置されている。また、距離センサー10と11、及び距離センサー12と13は、進行方向に対して直交する向きに(図3中では上下方向)沿って所定の間隔をおいてそれぞれ配置されている。すなわち、各距離センサー10〜13の位置が長方形の頂点位置となるように、地山掘削機1のトンネル側側面に配置されている。
【0018】
次に、この距離センサー10〜13を用いて地山掘削機1の既設トンネル3に対する位置及び姿勢を測定する方法について説明する。
【0019】
図4は、既設トンネル3に対する位置及び姿勢の測定方法を示す図である。本図に示すように、距離センサー10〜13で、既設トンネル3の外殻3aまでの距離を測定する。
【0020】
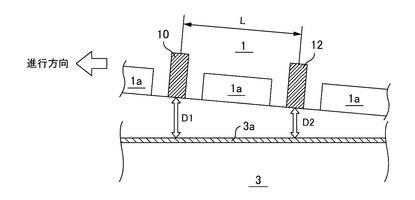
また、図5に示すように、進行方向に沿って配置された距離センサー10と12、或いは距離センサー11と13による測定値の差によりヨーイングを測定することができる。例えば、距離センサー10、12の測定値をそれぞれD1、D2とし、距離センサー10、12間の距離をLとすると、ヨーイングは(D1−D2)/Lにより算出される。これと並行して、距離センサー11と13を用いる場合も同様に測定する。
そして、両方の結果を平均して地山掘削機1のヨーイングとしてもよいし、両方の結果のうち、何れか一方の結果を採用して地山掘削機1のヨーイングとしてもよい。
なお、本実施形態では、地山掘削機1のヨーイングについて測定したが、例えば、既設トンネル3の上方に新設トンネル4を構築する場合は、地山掘削機1の下方に存在する既設トンネル3までの距離の測定値に基づいてピッチングを測定することができる。
【0021】
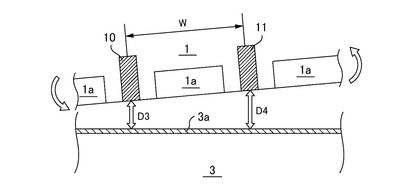
また、図6に示すように、進行方向に対して直交する向きに沿って配置された距離センサー10と11、或いは距離センサー12と13による測定値の差によりローリングを測定することができる。例えば、距離センサー10、11の測定値をそれぞれD3、D4とし、距離センサー10、11間の距離をWとすると、ローリングは(D3−D4)/Wにより算出される。これと並行して、距離センサー12と13を用いる場合も同様に測定する。
そして、両方の結果を平均して地山掘削機1のローリングとしてもよいし、両方の結果のうち、何れか一方の結果を採用して地山掘削機1のローリングとしてもよい。
【0022】
なお、本実施形態においては、距離センサー10〜13を4台用いたが、この数に限定されるものではなく、5台以上用いてもよい。
【0023】
次に、発信器20〜27及び受信器30〜33を用いて地山掘削機1の既設トンネル3の中心軸に対するずれ量を測定する方法について説明する。
【0024】
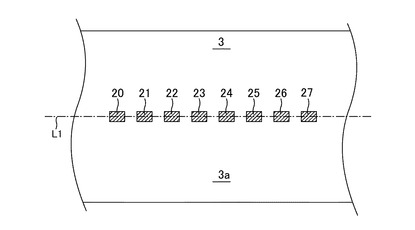
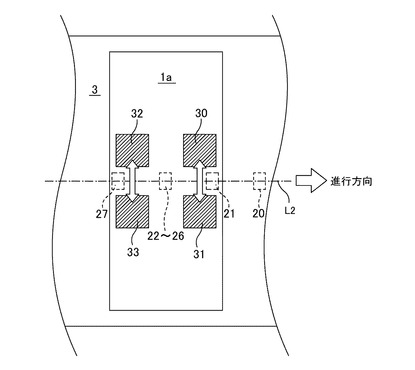
図2、図7及び図8に示すように、発信器20〜27は、既設トンネル3の内周面に、既設トンネル3の中心軸に平行で、かつ、当該中心軸と同じ高さ位置となるように設定された第1基準線L1に沿って、所定の間隔をおいて配置されている。
【0025】
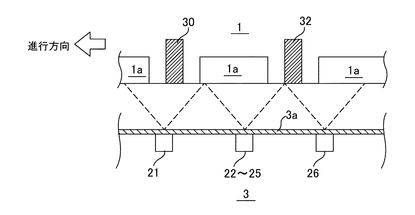
本実施形態では、発信器20〜27として、鋼製セグメント(或いは鋼板)を含む既設トンネル3の外殻3aを透過可能なγ線を放出するγ線放出器を用いた。
【0026】
発信器20〜27の設置間隔は、図2及び図8に示すように、地山掘削機1のトンネル側側面に向かって隙間無く測定用の信号を発信できるように設定されている。本実施形態では、地山掘削機1の進行方向前方側の発信器20から後方側の発信器27までの距離が、概ね地山掘削機1の全長と同じになるように設置されている。発信器20〜27は、地山掘削機1の進行に合わせて、後方側の発信器20〜27を進行方向前方側へ順番に盛り換え作業を行うものとする。これにより、地山掘削機1の全長をカバーする必要最小限の個数の発信器20〜27を用いて推進する地山掘削機1に対応して測定を行うことができる。
【0027】
γ線を放出する発信器20〜27の放出口には、特定の方向へのみγ線を放出できるようにスリットが設けられている。
【0028】
なお、各発信器20〜27におけるγ線の放出量はわずかなので、すべての発信器20〜27の放出量を合計しても「放射性同位元素等による放射線障害の防止に関する法律」(文部科学省)や「労働安全衛生法令」(厚生労働省)等に定められた放射線管理区域や管理者等を設定する必要がない程度である。
【0029】
図3に示すように、地山掘削機1の既設トンネル側側面には、複数の受信器30〜33が設置されている。
受信器30と31、及び受信器32と33は、地山掘削機1の中心軸に平行で、かつ、当該中心軸と同じ高さ位置となるように設定された第2基準線L2の両側に互いに間隔M1をおいて配置されている。すなわち、受信器30と31、及び受信器32と33の中央に第2基準線L2が位置するように配置されている。また、一対の受信器30と31、及び一対の受信器32と33は、第2基準線L2に沿って所定の間隔をおいてそれぞれ配置されている。
【0030】
本実施形態では、受信器30〜33として、γ線を検出可能なγ線レベル計(例えば、ナノグレイ社製の型番TH−3000)を用いた。このγ線レベル計は、γ線の強度をシンチレーション検出器方式で検出し、カウント表示することができる。
γ線レベル計を用いた場合の測定誤差は、数mm程度であり、高い精度での計測が可能である。
【0031】
第2基準線L2の両側にそれぞれ受信器30と31、及び受信器32と33を配置することにより、第1基準線L1に対する第2基準線L2のずれ量(つまり、既設トンネル3の中心軸に対する地山掘削機1の中心軸のずれ量)を検出可能である。以下に、このずれ量の検出方法について説明する。
【0032】
図9に示すように、発信器21が受信器30、31間の中央に位置した状態のときに、γ線の強度を測定すると受信器30、31のカウント値は同じ値となる。また、発信器27が受信器32、33間の中央に位置した状態のときに、強度を測定すると、受信器30、31のカウント値は同じ値となる。
【0033】
また、発信器21が受信器31側に近づくにつれて(図10(a)参照。図の詳細は後述する)、受信器31のカウント値は次第に大きくなり、受信器30のカウント値は次第に小さくなる。
【0034】
そして、受信器30と31の場合と同様に、発信器27が受信器33側に近づくにつれて、受信器33のカウント値は次第に大きくなり、受信器32のカウント値は次第に小さくなる。
【0035】
上述した発信器20〜27のずれ量の計算は、第1基準線L1と第2基準線L2のずれ量と、受信器30、31のカウント値の差との関係を示す関係式Fを予め実験によって求めておく。そして、測定後の受信器30、31のカウント値をその関係式Fに代入することによってずれ量が算出される。
【0036】
したがって、受信器30、31及び受信器32、33によって測定されるγ線のカウント値に基づいて上記ずれ量を検出することができる。
【0037】
次に、第1基準線L1に対して第2基準線L2がずれている状態の例を幾つか示して具体的に説明する。
【0038】
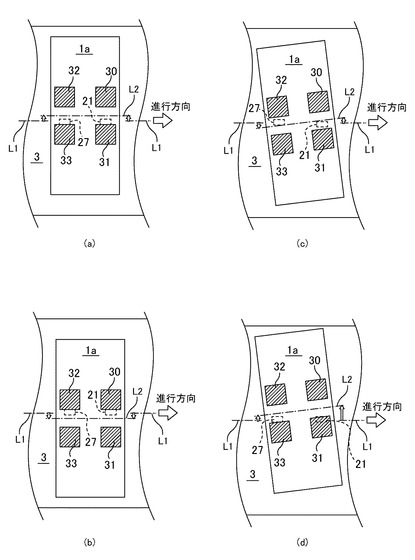
まず、図10(a)に示すように、地山掘削機1の中心軸が、既設トンネル3の中心軸よりも高い位置で、既設トンネル3の中心軸に対して平行な状態で存在している場合について説明する。
【0039】
係る場合、発信器21、27が、受信器31、33の近くに位置するため、受信器31、33のカウント値は、それぞれ受信器30、32のカウント値よりも大きくなる。また、受信器31と33と、受信器30と32とのカウント値はそれぞれ同じ値となる。
【0040】
そして、第1基準線に対する第2基準線L2のずれ量は、受信器30、31、及び受信器32、33のカウント値を上記関係式Fに代入することにより、それぞれ算出される。
【0041】
なお、本実施形態では、発信器21、27がそれぞれ受信器31、33に近づいた場合のずれ量をプラス表示し、発信器21、27がそれぞれ受信器30、32に近づいた場合のずれ量をマイナス表示することとする。すなわち、プラス表示されると第2基準線L2は上方へ、マイナス表示されると第2基準線L2は下方へずれていることを表すこととなる。
【0042】
ずれ量は、受信器30、31の設置されている部位、及び受信器32、33の設置されている部位についてそれぞれ算出される。本例の場合は、受信器31と33と、受信器30と32とのカウント値はそれぞれ同じ値なので、第2基準線L2のずれ量は、受信器30、31の設置されている部位、及び受信器32、33の設置されている部位について同じ値がプラス表示にて算出される。
【0043】
したがって、第2基準線L2は、第1基準線L1に対して平行に上方へずれた状態であると判断できる。
【0044】
次に、図10(b)に示すように、地山掘削機1の中心軸が、既設トンネル3の中心軸よりも低い位置で、既設トンネル3の中心軸に対して平行な状態で存在している場合について説明する。
【0045】
係る場合、発信器21、27が、受信器30、32の近くに位置するため、受信器30、32のカウント値は、それぞれ受信器31、33のカウント値よりも大きくなる。また、受信器30と32と、受信器31と33とのカウント値はそれぞれ同じ値となる。
【0046】
そして、第1基準線に対する第2基準線L2のずれ量は、受信器30、31、及び受信器32、33のカウント値を上記関係式Fに代入することにより、それぞれ算出される。
【0047】
本例の場合は、受信器31と33と、受信器30と32とのカウント値はそれぞれ同じ値なので、第2基準線L2のずれ量は、受信器30、31の設置されている部位、及び受信器32、33の設置されている部位について同じ値がマイナス表示にて算出される。
【0048】
したがって、第2基準線L2が第1基準線L1に対して並行に下方へずれた状態であると判断できる。
【0049】
次に、図10(c)に示すように、地山掘削機1の前方側が上向きに傾いた状態で存在している場合について説明する。
【0050】
係る場合、発信器21、27が、受信器31、32の近くに位置するため、受信器31、32のカウント値は、それぞれ受信器30、33のカウント値よりも大きくなる。また、各受信器30〜33のカウント値はそれぞれ異なる値となる。
【0051】
そして、第2基準線L2のずれ量は、受信器30、31、及び受信器32、33のカウント値を上記関係式Fに代入することにより、それぞれ算出される。
【0052】
本例の場合は、各受信器30〜33のカウント値はそれぞれ異なる値であるが、受信器31が受信器30よりも大きいカウント値を示し、かつ、受信器32が受信器33よりも大きいカウント値を示しているので、第2基準線L2のずれ量は、受信器30、31の設置されている部位、及び受信器32、33の設置されている部位について異なる値がそれぞれプラス表示、マイナス表示にて算出される。
【0053】
したがって、受信器30、31の設置されている部位では、第2基準線L2の位置が第1基準線L1に対して上方へずれて、かつ、受信器32、33の設置部位では、第2基準線L2の位置が下方へずれていることとなる。すなわち、第2基準線L2の前方側が上向きに傾いた状態であると判断できる。
【0054】
そして、図10(d)に示すように、地山掘削機1の前方側が上向きに傾いた状態で、上記図10(c)よりも大幅に上方に存在している場合について説明する。
【0055】
係る場合、発信器21、27が、受信器31、33の近くに位置しているが、発信器21と受信器31、発信器27と受信器33までの距離はそれぞれ異なるため、各受信器30〜33のカウント値は全く異なる値を示す。
ただし、発信器21、27が、受信器30、32よりも受信器31、33の近くに位置するため、受信器31、33のカウント値は、それぞれ受信器30、32のカウント値よりも大きくなる。
また、発信器21から受信器31までの距離は、発信器27から受信器33までの距離よりも短いため、受信器31のカウント値は、受信器33のカウント値よりも大きくなる。
さらに、発信器27から受信器32までの距離は、発信器21から受信器30までの距離よりも短いため、受信器32のカウント値は、受信器30のカウント値よりも大きくなる。
【0056】
そして、第2基準線L2のずれ量は、受信器30、31、及び受信器32、33のカウント値を上記関係式Fに代入することにより、それぞれ算出される。
【0057】
本例の場合は、各受信器30〜33のカウント値はそれぞれ異なる値であるが、受信器31、33がそれぞれ受信器30、32よりも大きいカウント値を示しているので、第2基準線L2のずれ量は、受信器30、31の設置されている部位、及び受信器32、33の設置されている部位について異なる値がそれぞれプラス表示にて算出される。
ここで、受信器30、31の設置されている部位のずれ量は、受信器32、33の設置されている部位のずれ量よりも大きな値となる。
【0058】
したがって、受信器30と31、及び受信器32と33の設置されている部位において共に、第2基準線L2の位置が第1基準線L1に対して上方へずれ、かつ、第2基準線L2の前方側が上向きに傾いた状態であると判断できる。
【0059】
また、図示はしないが、地山掘削機1の前方側が下向きに傾いた状態で存在している場合も、上記と同様に、各受信器30〜33のカウント値を上記関係式Fに代入し、第2基準線L2のずれ量を算出することにより、第1基準線L1に対する第2基準線L2の位置を判断することができる。
【0060】
上述した構成からなる地山掘削機1で既設トンネル3に近接する新設トンネル4を掘削する際は、距離センサー10〜13で既設トンネル3との距離を測定して、ヨーイング及びローリングを算出する。また、これと並行して、受信器30〜33でγ線の強度を測定して、第1基準線L1に対する第2基準線L2のずれ量を算出する。そして、ヨーイング、ローリング及び第1基準線L1に対するずれ量が設計等により定められた範囲内である場合は、そのまま地山掘削機1を推進させる。しかし、ヨーイング、ローリング、第1基準線L1に対するずれ量の何れかが設計等により定められている範囲外の場合は、シールドジャッキや中折れジャッキ等を調整して地山掘削機1の姿勢を修正する。
【0061】
そして、予め設計等により定められた距離を掘削したら、掘削作業を停止して、既設トンネル3と新設トンネル4との間を掘削して両トンネル3、4を接続する。
【0062】
以上説明した本実施形態における位置検出システム2によれば、地山掘削機1に設けた距離センサー10〜13のみによって、既設トンネル3に発信器を取り付けることなく、既設トンネル3と地山掘削機1との距離を測定することができる。
【0063】
また、距離センサー10〜13を進行方向に沿って複数配置しているため、地山掘削機1のヨーイングを測定することができる。さらに、距離センサー10〜13を進行方向に対して直交する向きに沿って複数配置しているため、地山掘削機1のローリングを測定することができる。そして、地山掘削機1は、ヨーイング及びローリングを測定しながら推進するため、設計等により定められた傾斜角度で正確に既設トンネル3に近接することができる。
【0064】
また、発信器20〜27から放出されるγ線を複数の受信器30〜33で受信するので、第1基準線L1に対する第2基準線L2のずれ量を検出することができる。したがって、既設トンネル3の中心軸に対する地山掘削機1の中心軸の上下方向のずれ量及び傾きを検出することができる。さらに、既設トンネル3に対する地山掘削機1の中心軸の上下方向のずれ量及び傾きを検出しながら、その結果に基づいて、地山掘削機1の姿勢を修正して推進させることができるので、新しいトンネルを精度良く構築することができる。
【0065】
なお、本実施形態では、既設トンネル3に向かって近接する新設トンネル4を構築する場合について説明したが、これに限定されるものではなく、既設トンネル3から離間するように新設トンネル4を構築する場合にも本発明を適用可能である。
【0066】
なお、本実施形態において、第1基準線L1と第2基準線L2とのずれ量を検出するために、γ線を放出する発信器及びその受信器を用いた場合について説明したが、これに限定されるものではなく、既設トンネル3と地山掘削機1との離間距離に応じて測定装置を変更することとする。例えば、離間距離が10mm〜100mm程度の場合には、高精度にずれを検出しなければならないため、γ線を用いて測定するが、離間距離が数m以上ある場合には、γ線では測定できないため、γ線よりもやや精度は低くなるが離間距離が大きくても測定可能な超音波センサーやレーダーセンサー等を用い、所定距離まで近接したらγ線を用いて測定を行うこととしてもよい。
【0067】
なお、本実施形態において、第1基準線L1を、既設トンネル3の中心軸に対して平行に既設トンネル3の外殻3aの内周面に設定した場合について説明したが、この位置に限定されるものではなく、例えば、第1基準線L1を、既設トンネル3の中心軸に設定したり、既設トンネル3の周方向に、リング状に設定したりしてもよい。既設トンネル3の周方向に第1基準線L1を設定した場合を以下の第二実施形態で説明する。
【0068】
なお、本実施形態において、第2基準線L2を、地山掘削機1の中心軸に対して平行に地山掘削機1の外殻1aの内周面に設定した場合について説明したが、この位置に限定されるものではなく、例えば、第2基準線L2を、地山掘削機1の中心軸に設定してもよい。
【0069】
次に、本発明の第二実施形態について説明する。第二実施形態は、円形断面の既設トンネル3の周囲を拡幅する際に、既設トンネル3の周りを地山掘削機1で掘削するものである。
以下の説明において、第一実施形態に対応する部分には同一の符号を付して説明を省略し、主に相違点について説明する。
【0070】
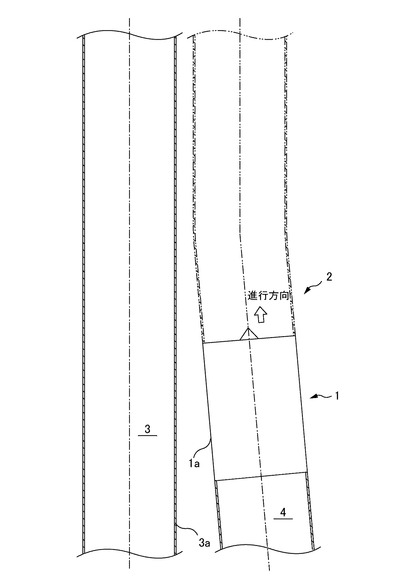
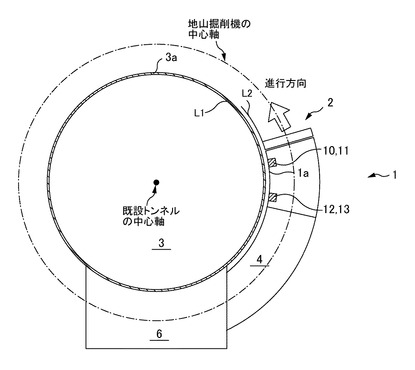
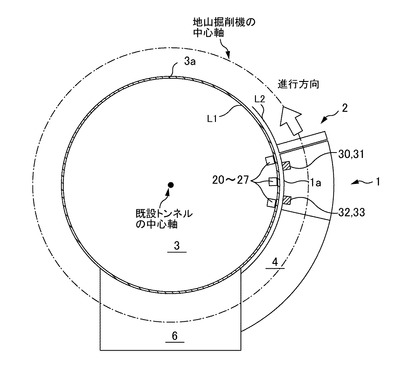
図11は、本発明の第二実施形態に係る既設トンネル3と新設トンネル4との位置関係を示す断面図である。
図11に示すように、既設トンネル3の底盤を開削して構築された発進立坑6から既設トンネル3の外殻3aに沿って地山掘削機1を推進させて、新設トンネル4を構築する。
本実施形態において、既設トンネル3内に設定される第1基準線L1は、既設トンネル3の周方向に、リング状に設定されている。
【0071】
また、図12に示すように、発信器20〜27は、第1基準線L1に沿って既設トンネル3の内周面に複数配置されている。
地山掘削機1は、第1基準線L1に沿って既設トンネル3の外周部を掘削する。地山掘削機1は、図示しないが、発進立坑6に設置されたジャッキにより、円弧状の押管を介して進行方向へ押し出されることによって推進する。
また、地山掘削機1の既設トンネル3側の底面には、地山掘削機1の中心軸を鉛直真下に投影した第2基準線L2が設定されている。
【0072】
図11及び図12中では、図面の簡略化のため、距離センサー10〜13及び受信器30〜33の数を省略して表示しているが、距離センサー10〜13及び受信器30〜33は地山掘削機1の既設トンネル3側の底面に、第1実施形態と同様に、複数設置されている。
【0073】
上述した構成からなる地山掘削機1で既設トンネル3の外周部を掘削する際は、距離センサー10〜13で既設トンネル3との距離を測定して、ピッチング及びローリングを算出するとともに、受信器30〜33でγ線の強度を測定して、第1基準線L1に対する第2基準線L2のずれ量を算出する。そして、ピッチング、ローリング及び第1基準線L1に対するずれ量が設計等により定められた範囲内である場合は、そのまま地山掘削機1を推進させる。しかし、ピッチング、ローリング、第1基準線L1に対するずれ量の何れかが設計等により定められている範囲外の場合は、シールドジャッキや中折れジャッキ等を調整して地山掘削機1の姿勢を修正する。
【0074】
以上説明した本実施形態における位置検出システム2によれば、既設トンネル3の周方向に設定された第1基準線L1に沿って地山掘削機1を推進させることができるので、既設トンネル3の周囲を正確に掘削することができる。したがって、地山掘削機1を発進立坑6に精度良く到達させることができる。
【0075】
なお、上述した各実施形態において、距離センサー10〜13として、渦電流式センサーを用いたが、これに限定されるものではなく、超音波センサーや電磁波センサーを用いてもよい。要は、測定用の信号を発信し、既設トンネル3までの距離を測定可能な機能を備えたものであればよい。
【0076】
また、上述した各実施形態において、発信器20〜27として、γ線放出器を用いたが、これに限定されるものではなく、鋼製セグメントから構成された(或いは鋼板を含む)既設トンネル3の外殻3aを透過可能な性質を有する信号を発信する機能を備えたものであればよい。
【0077】
また、上述した各実施形態において、第1基準線L1に対する第2基準線L2のずれ量を測定しながら地山掘削機1を推進させる場合について説明したが、既設トンネル3に対して新設トンネル4の深度方向の位置を測定する必要がない場合には、発信器20〜27及び受信器30〜33によるずれ量の測定を省略して、距離センサー10〜13のみによる距離の測定を行ってもよい。
【符号の説明】
【0078】
1 地山掘削機
1a 外殻
2 位置検出システム
3 既設トンネル
3a 外殻
4 新設トンネル
6 発進立坑
10〜13 距離センサー
20〜27 発信器
30〜33 受信器
L1 第1基準線
L2 第2基準線
【技術分野】
【0001】
本発明は、既設トンネルに近接するトンネルを構築する際に、既設トンネルを基準とした、上記トンネルを掘削する地山掘削機の位置を検出する位置検出システム及びそのシステムを備えた地山掘削機に関する。
【背景技術】
【0002】
既設トンネルに近接するトンネルを構築する際は、このトンネルを掘削するための地山掘削機と既設トンネルとの位置関係を正確に把握する必要がある。
そこで、従来より、例えば、特許文献1に示すように、既設トンネルの地山掘削機側の外側面に発信器を、地山掘削機の既設トンネル側の側部に受信器をそれぞれ設置して、発信器から発信された信号を受信器で受信することにより、両者間の距離を測定しながらトンネルを掘削する工法が用いられている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平9−242470号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されている測定方法では、既設トンネルに設置された発信器に対向する側方位置に地山掘削機の受信部が存在しないと両者間の距離を測定することができないという問題点があった。
【0005】
そこで、本発明は、上記の問題に鑑みなされたものであり、既設トンネルに発信器を取り付けることなく、既設トンネルと地山掘削機との間の距離を測定可能な地山掘削機の位置検出システム及びそのシステムを備えた地山掘削機を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、既設トンネルに近接するトンネルを構築する際に、前記既設トンネルを基準とした、前記トンネルを掘削するための地山掘削機の位置を検出する地山掘削機の位置検出システムであって、
前記既設トンネルに向かって発信する所定の信号に起因して、前記既設トンネルまでの距離に応じて生じる信号を受信し、前記既設トンネルまでの距離を測定可能な距離センサーを備えることを特徴とする。
【0007】
また、本発明において、前記距離センサーは、進行方向に沿って所定の間隔をおいて複数配置されていることしてもよい。
【0008】
また、本発明において、前記距離センサーは、進行方向に対して直交する向きに沿って所定の間隔をおいて複数配置されていることとしてもよい。
【0009】
本発明は地山掘削機であって、上述した地山掘削機の位置検出システムを備えることを特徴とする。
【発明の効果】
【0010】
本発明によれば、既設トンネルに発信器を取り付けることなく、既設トンネルとの距離を測定可能な地山掘削機の位置検出システム及びそのシステムを備えた地山掘削機を提供することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の第一実施形態に係る既設トンネルと新設トンネルとの位置関係を示す平面図である。
【図2】既設トンネルの外殻部分と地山掘削機とを拡大して示す平面図である。
【図3】図2のA矢視図である。
【図4】既設トンネルまでの距離の測定方法を示す図である。
【図5】ヨーイングの測定方法を示す図である。
【図6】ローリングの測定方法を示す図である。
【図7】図2のB矢視図である。
【図8】γ線による測定方法を示す図である。
【図9】第1基準線に対する第2基準線のずれ量を検出する方法を示す図である。
【図10】第1基準線に対する第2基準線のずれを説明するための図である。
【図11】本発明の第二実施形態に係る既設トンネルと新設トンネルとの位置関係を示す断面図である。
【図12】発信器及び受信器を設置した状態を示す概念図である。
【発明を実施するための形態】
【0012】
以下、本発明の地山掘削機1の位置検出システム2の好ましい実施形態について図面を用いて詳細に説明する。本発明の地山掘削機1の位置検出システム2は、既設トンネル3に対する地山掘削機1の位置及び姿勢を検出するものである。なお、本実施形態では、地山掘削機1として、シールド機を用いる場合について説明するが、これに限定されるものではなく、トンネルを掘削可能な機械であれば本発明を適用可能である。
【0013】
本発明の第一実施形態では、既設トンネル3の分岐・合流部の構築に際して、既設トンネル3に向かって側方から近接するように新設トンネル4を構築する場合について説明する。なお、本実施形態においては、既設トンネル3及び新設トンネル4はともに、矩形断面のトンネルとした場合について説明するが、この形状に限定されるものではなく、断面が真円状や楕円状のトンネルであってもよい。
【0014】
図1は、本発明の第一実施形態に係る既設トンネル3と新設トンネル4との位置関係を示す平面図である。また、図2は、既設トンネル3の外殻3a部分と地山掘削機1とを拡大して示す平面図である。また、図3は、図2のA矢視図である。
【0015】
これらの図に示すように、位置検出システム2は、地山掘削機1の外殻1aに取り付けられて、既設トンネル3までの距離を測定可能な距離センサー10〜13と、既設トンネル3の内周面に取り付けられて、既設トンネル3の外殻3a及び地山を透過可能な信号を発信する発信器20〜27と、地山掘削機1の外殻1aに取り付けられて、発信器20〜27から発信された信号を受信可能な受信器30〜33と、を備えている。
【0016】
距離センサー10〜13は、地山掘削機1の既設トンネル3側の側面(図2では左側の側面。以下、地山掘削機1のトンネル側側面という)に複数設置されている。本実施形態では、既設トンネル3の外殻3aは鋼製セグメント及びコンクリート等で構成されているものとし、距離センサー10〜13として、金属面を測定対象とする渦電流式センサーを用いた。
なお、外殻3aを構成するセグメントがRCセグメントである等、外殻3aが金属材を含んでいない場合は、既設トンネル3の外殻3aの側面を覆うように鋼板を設置するものとする。
【0017】
図3に示すように、距離センサー10と12、及び距離センサー11と13は、進行方向(図3中では左右方向)に沿って所定の間隔をおいてそれぞれ配置されている。また、距離センサー10と11、及び距離センサー12と13は、進行方向に対して直交する向きに(図3中では上下方向)沿って所定の間隔をおいてそれぞれ配置されている。すなわち、各距離センサー10〜13の位置が長方形の頂点位置となるように、地山掘削機1のトンネル側側面に配置されている。
【0018】
次に、この距離センサー10〜13を用いて地山掘削機1の既設トンネル3に対する位置及び姿勢を測定する方法について説明する。
【0019】
図4は、既設トンネル3に対する位置及び姿勢の測定方法を示す図である。本図に示すように、距離センサー10〜13で、既設トンネル3の外殻3aまでの距離を測定する。
【0020】
また、図5に示すように、進行方向に沿って配置された距離センサー10と12、或いは距離センサー11と13による測定値の差によりヨーイングを測定することができる。例えば、距離センサー10、12の測定値をそれぞれD1、D2とし、距離センサー10、12間の距離をLとすると、ヨーイングは(D1−D2)/Lにより算出される。これと並行して、距離センサー11と13を用いる場合も同様に測定する。
そして、両方の結果を平均して地山掘削機1のヨーイングとしてもよいし、両方の結果のうち、何れか一方の結果を採用して地山掘削機1のヨーイングとしてもよい。
なお、本実施形態では、地山掘削機1のヨーイングについて測定したが、例えば、既設トンネル3の上方に新設トンネル4を構築する場合は、地山掘削機1の下方に存在する既設トンネル3までの距離の測定値に基づいてピッチングを測定することができる。
【0021】
また、図6に示すように、進行方向に対して直交する向きに沿って配置された距離センサー10と11、或いは距離センサー12と13による測定値の差によりローリングを測定することができる。例えば、距離センサー10、11の測定値をそれぞれD3、D4とし、距離センサー10、11間の距離をWとすると、ローリングは(D3−D4)/Wにより算出される。これと並行して、距離センサー12と13を用いる場合も同様に測定する。
そして、両方の結果を平均して地山掘削機1のローリングとしてもよいし、両方の結果のうち、何れか一方の結果を採用して地山掘削機1のローリングとしてもよい。
【0022】
なお、本実施形態においては、距離センサー10〜13を4台用いたが、この数に限定されるものではなく、5台以上用いてもよい。
【0023】
次に、発信器20〜27及び受信器30〜33を用いて地山掘削機1の既設トンネル3の中心軸に対するずれ量を測定する方法について説明する。
【0024】
図2、図7及び図8に示すように、発信器20〜27は、既設トンネル3の内周面に、既設トンネル3の中心軸に平行で、かつ、当該中心軸と同じ高さ位置となるように設定された第1基準線L1に沿って、所定の間隔をおいて配置されている。
【0025】
本実施形態では、発信器20〜27として、鋼製セグメント(或いは鋼板)を含む既設トンネル3の外殻3aを透過可能なγ線を放出するγ線放出器を用いた。
【0026】
発信器20〜27の設置間隔は、図2及び図8に示すように、地山掘削機1のトンネル側側面に向かって隙間無く測定用の信号を発信できるように設定されている。本実施形態では、地山掘削機1の進行方向前方側の発信器20から後方側の発信器27までの距離が、概ね地山掘削機1の全長と同じになるように設置されている。発信器20〜27は、地山掘削機1の進行に合わせて、後方側の発信器20〜27を進行方向前方側へ順番に盛り換え作業を行うものとする。これにより、地山掘削機1の全長をカバーする必要最小限の個数の発信器20〜27を用いて推進する地山掘削機1に対応して測定を行うことができる。
【0027】
γ線を放出する発信器20〜27の放出口には、特定の方向へのみγ線を放出できるようにスリットが設けられている。
【0028】
なお、各発信器20〜27におけるγ線の放出量はわずかなので、すべての発信器20〜27の放出量を合計しても「放射性同位元素等による放射線障害の防止に関する法律」(文部科学省)や「労働安全衛生法令」(厚生労働省)等に定められた放射線管理区域や管理者等を設定する必要がない程度である。
【0029】
図3に示すように、地山掘削機1の既設トンネル側側面には、複数の受信器30〜33が設置されている。
受信器30と31、及び受信器32と33は、地山掘削機1の中心軸に平行で、かつ、当該中心軸と同じ高さ位置となるように設定された第2基準線L2の両側に互いに間隔M1をおいて配置されている。すなわち、受信器30と31、及び受信器32と33の中央に第2基準線L2が位置するように配置されている。また、一対の受信器30と31、及び一対の受信器32と33は、第2基準線L2に沿って所定の間隔をおいてそれぞれ配置されている。
【0030】
本実施形態では、受信器30〜33として、γ線を検出可能なγ線レベル計(例えば、ナノグレイ社製の型番TH−3000)を用いた。このγ線レベル計は、γ線の強度をシンチレーション検出器方式で検出し、カウント表示することができる。
γ線レベル計を用いた場合の測定誤差は、数mm程度であり、高い精度での計測が可能である。
【0031】
第2基準線L2の両側にそれぞれ受信器30と31、及び受信器32と33を配置することにより、第1基準線L1に対する第2基準線L2のずれ量(つまり、既設トンネル3の中心軸に対する地山掘削機1の中心軸のずれ量)を検出可能である。以下に、このずれ量の検出方法について説明する。
【0032】
図9に示すように、発信器21が受信器30、31間の中央に位置した状態のときに、γ線の強度を測定すると受信器30、31のカウント値は同じ値となる。また、発信器27が受信器32、33間の中央に位置した状態のときに、強度を測定すると、受信器30、31のカウント値は同じ値となる。
【0033】
また、発信器21が受信器31側に近づくにつれて(図10(a)参照。図の詳細は後述する)、受信器31のカウント値は次第に大きくなり、受信器30のカウント値は次第に小さくなる。
【0034】
そして、受信器30と31の場合と同様に、発信器27が受信器33側に近づくにつれて、受信器33のカウント値は次第に大きくなり、受信器32のカウント値は次第に小さくなる。
【0035】
上述した発信器20〜27のずれ量の計算は、第1基準線L1と第2基準線L2のずれ量と、受信器30、31のカウント値の差との関係を示す関係式Fを予め実験によって求めておく。そして、測定後の受信器30、31のカウント値をその関係式Fに代入することによってずれ量が算出される。
【0036】
したがって、受信器30、31及び受信器32、33によって測定されるγ線のカウント値に基づいて上記ずれ量を検出することができる。
【0037】
次に、第1基準線L1に対して第2基準線L2がずれている状態の例を幾つか示して具体的に説明する。
【0038】
まず、図10(a)に示すように、地山掘削機1の中心軸が、既設トンネル3の中心軸よりも高い位置で、既設トンネル3の中心軸に対して平行な状態で存在している場合について説明する。
【0039】
係る場合、発信器21、27が、受信器31、33の近くに位置するため、受信器31、33のカウント値は、それぞれ受信器30、32のカウント値よりも大きくなる。また、受信器31と33と、受信器30と32とのカウント値はそれぞれ同じ値となる。
【0040】
そして、第1基準線に対する第2基準線L2のずれ量は、受信器30、31、及び受信器32、33のカウント値を上記関係式Fに代入することにより、それぞれ算出される。
【0041】
なお、本実施形態では、発信器21、27がそれぞれ受信器31、33に近づいた場合のずれ量をプラス表示し、発信器21、27がそれぞれ受信器30、32に近づいた場合のずれ量をマイナス表示することとする。すなわち、プラス表示されると第2基準線L2は上方へ、マイナス表示されると第2基準線L2は下方へずれていることを表すこととなる。
【0042】
ずれ量は、受信器30、31の設置されている部位、及び受信器32、33の設置されている部位についてそれぞれ算出される。本例の場合は、受信器31と33と、受信器30と32とのカウント値はそれぞれ同じ値なので、第2基準線L2のずれ量は、受信器30、31の設置されている部位、及び受信器32、33の設置されている部位について同じ値がプラス表示にて算出される。
【0043】
したがって、第2基準線L2は、第1基準線L1に対して平行に上方へずれた状態であると判断できる。
【0044】
次に、図10(b)に示すように、地山掘削機1の中心軸が、既設トンネル3の中心軸よりも低い位置で、既設トンネル3の中心軸に対して平行な状態で存在している場合について説明する。
【0045】
係る場合、発信器21、27が、受信器30、32の近くに位置するため、受信器30、32のカウント値は、それぞれ受信器31、33のカウント値よりも大きくなる。また、受信器30と32と、受信器31と33とのカウント値はそれぞれ同じ値となる。
【0046】
そして、第1基準線に対する第2基準線L2のずれ量は、受信器30、31、及び受信器32、33のカウント値を上記関係式Fに代入することにより、それぞれ算出される。
【0047】
本例の場合は、受信器31と33と、受信器30と32とのカウント値はそれぞれ同じ値なので、第2基準線L2のずれ量は、受信器30、31の設置されている部位、及び受信器32、33の設置されている部位について同じ値がマイナス表示にて算出される。
【0048】
したがって、第2基準線L2が第1基準線L1に対して並行に下方へずれた状態であると判断できる。
【0049】
次に、図10(c)に示すように、地山掘削機1の前方側が上向きに傾いた状態で存在している場合について説明する。
【0050】
係る場合、発信器21、27が、受信器31、32の近くに位置するため、受信器31、32のカウント値は、それぞれ受信器30、33のカウント値よりも大きくなる。また、各受信器30〜33のカウント値はそれぞれ異なる値となる。
【0051】
そして、第2基準線L2のずれ量は、受信器30、31、及び受信器32、33のカウント値を上記関係式Fに代入することにより、それぞれ算出される。
【0052】
本例の場合は、各受信器30〜33のカウント値はそれぞれ異なる値であるが、受信器31が受信器30よりも大きいカウント値を示し、かつ、受信器32が受信器33よりも大きいカウント値を示しているので、第2基準線L2のずれ量は、受信器30、31の設置されている部位、及び受信器32、33の設置されている部位について異なる値がそれぞれプラス表示、マイナス表示にて算出される。
【0053】
したがって、受信器30、31の設置されている部位では、第2基準線L2の位置が第1基準線L1に対して上方へずれて、かつ、受信器32、33の設置部位では、第2基準線L2の位置が下方へずれていることとなる。すなわち、第2基準線L2の前方側が上向きに傾いた状態であると判断できる。
【0054】
そして、図10(d)に示すように、地山掘削機1の前方側が上向きに傾いた状態で、上記図10(c)よりも大幅に上方に存在している場合について説明する。
【0055】
係る場合、発信器21、27が、受信器31、33の近くに位置しているが、発信器21と受信器31、発信器27と受信器33までの距離はそれぞれ異なるため、各受信器30〜33のカウント値は全く異なる値を示す。
ただし、発信器21、27が、受信器30、32よりも受信器31、33の近くに位置するため、受信器31、33のカウント値は、それぞれ受信器30、32のカウント値よりも大きくなる。
また、発信器21から受信器31までの距離は、発信器27から受信器33までの距離よりも短いため、受信器31のカウント値は、受信器33のカウント値よりも大きくなる。
さらに、発信器27から受信器32までの距離は、発信器21から受信器30までの距離よりも短いため、受信器32のカウント値は、受信器30のカウント値よりも大きくなる。
【0056】
そして、第2基準線L2のずれ量は、受信器30、31、及び受信器32、33のカウント値を上記関係式Fに代入することにより、それぞれ算出される。
【0057】
本例の場合は、各受信器30〜33のカウント値はそれぞれ異なる値であるが、受信器31、33がそれぞれ受信器30、32よりも大きいカウント値を示しているので、第2基準線L2のずれ量は、受信器30、31の設置されている部位、及び受信器32、33の設置されている部位について異なる値がそれぞれプラス表示にて算出される。
ここで、受信器30、31の設置されている部位のずれ量は、受信器32、33の設置されている部位のずれ量よりも大きな値となる。
【0058】
したがって、受信器30と31、及び受信器32と33の設置されている部位において共に、第2基準線L2の位置が第1基準線L1に対して上方へずれ、かつ、第2基準線L2の前方側が上向きに傾いた状態であると判断できる。
【0059】
また、図示はしないが、地山掘削機1の前方側が下向きに傾いた状態で存在している場合も、上記と同様に、各受信器30〜33のカウント値を上記関係式Fに代入し、第2基準線L2のずれ量を算出することにより、第1基準線L1に対する第2基準線L2の位置を判断することができる。
【0060】
上述した構成からなる地山掘削機1で既設トンネル3に近接する新設トンネル4を掘削する際は、距離センサー10〜13で既設トンネル3との距離を測定して、ヨーイング及びローリングを算出する。また、これと並行して、受信器30〜33でγ線の強度を測定して、第1基準線L1に対する第2基準線L2のずれ量を算出する。そして、ヨーイング、ローリング及び第1基準線L1に対するずれ量が設計等により定められた範囲内である場合は、そのまま地山掘削機1を推進させる。しかし、ヨーイング、ローリング、第1基準線L1に対するずれ量の何れかが設計等により定められている範囲外の場合は、シールドジャッキや中折れジャッキ等を調整して地山掘削機1の姿勢を修正する。
【0061】
そして、予め設計等により定められた距離を掘削したら、掘削作業を停止して、既設トンネル3と新設トンネル4との間を掘削して両トンネル3、4を接続する。
【0062】
以上説明した本実施形態における位置検出システム2によれば、地山掘削機1に設けた距離センサー10〜13のみによって、既設トンネル3に発信器を取り付けることなく、既設トンネル3と地山掘削機1との距離を測定することができる。
【0063】
また、距離センサー10〜13を進行方向に沿って複数配置しているため、地山掘削機1のヨーイングを測定することができる。さらに、距離センサー10〜13を進行方向に対して直交する向きに沿って複数配置しているため、地山掘削機1のローリングを測定することができる。そして、地山掘削機1は、ヨーイング及びローリングを測定しながら推進するため、設計等により定められた傾斜角度で正確に既設トンネル3に近接することができる。
【0064】
また、発信器20〜27から放出されるγ線を複数の受信器30〜33で受信するので、第1基準線L1に対する第2基準線L2のずれ量を検出することができる。したがって、既設トンネル3の中心軸に対する地山掘削機1の中心軸の上下方向のずれ量及び傾きを検出することができる。さらに、既設トンネル3に対する地山掘削機1の中心軸の上下方向のずれ量及び傾きを検出しながら、その結果に基づいて、地山掘削機1の姿勢を修正して推進させることができるので、新しいトンネルを精度良く構築することができる。
【0065】
なお、本実施形態では、既設トンネル3に向かって近接する新設トンネル4を構築する場合について説明したが、これに限定されるものではなく、既設トンネル3から離間するように新設トンネル4を構築する場合にも本発明を適用可能である。
【0066】
なお、本実施形態において、第1基準線L1と第2基準線L2とのずれ量を検出するために、γ線を放出する発信器及びその受信器を用いた場合について説明したが、これに限定されるものではなく、既設トンネル3と地山掘削機1との離間距離に応じて測定装置を変更することとする。例えば、離間距離が10mm〜100mm程度の場合には、高精度にずれを検出しなければならないため、γ線を用いて測定するが、離間距離が数m以上ある場合には、γ線では測定できないため、γ線よりもやや精度は低くなるが離間距離が大きくても測定可能な超音波センサーやレーダーセンサー等を用い、所定距離まで近接したらγ線を用いて測定を行うこととしてもよい。
【0067】
なお、本実施形態において、第1基準線L1を、既設トンネル3の中心軸に対して平行に既設トンネル3の外殻3aの内周面に設定した場合について説明したが、この位置に限定されるものではなく、例えば、第1基準線L1を、既設トンネル3の中心軸に設定したり、既設トンネル3の周方向に、リング状に設定したりしてもよい。既設トンネル3の周方向に第1基準線L1を設定した場合を以下の第二実施形態で説明する。
【0068】
なお、本実施形態において、第2基準線L2を、地山掘削機1の中心軸に対して平行に地山掘削機1の外殻1aの内周面に設定した場合について説明したが、この位置に限定されるものではなく、例えば、第2基準線L2を、地山掘削機1の中心軸に設定してもよい。
【0069】
次に、本発明の第二実施形態について説明する。第二実施形態は、円形断面の既設トンネル3の周囲を拡幅する際に、既設トンネル3の周りを地山掘削機1で掘削するものである。
以下の説明において、第一実施形態に対応する部分には同一の符号を付して説明を省略し、主に相違点について説明する。
【0070】
図11は、本発明の第二実施形態に係る既設トンネル3と新設トンネル4との位置関係を示す断面図である。
図11に示すように、既設トンネル3の底盤を開削して構築された発進立坑6から既設トンネル3の外殻3aに沿って地山掘削機1を推進させて、新設トンネル4を構築する。
本実施形態において、既設トンネル3内に設定される第1基準線L1は、既設トンネル3の周方向に、リング状に設定されている。
【0071】
また、図12に示すように、発信器20〜27は、第1基準線L1に沿って既設トンネル3の内周面に複数配置されている。
地山掘削機1は、第1基準線L1に沿って既設トンネル3の外周部を掘削する。地山掘削機1は、図示しないが、発進立坑6に設置されたジャッキにより、円弧状の押管を介して進行方向へ押し出されることによって推進する。
また、地山掘削機1の既設トンネル3側の底面には、地山掘削機1の中心軸を鉛直真下に投影した第2基準線L2が設定されている。
【0072】
図11及び図12中では、図面の簡略化のため、距離センサー10〜13及び受信器30〜33の数を省略して表示しているが、距離センサー10〜13及び受信器30〜33は地山掘削機1の既設トンネル3側の底面に、第1実施形態と同様に、複数設置されている。
【0073】
上述した構成からなる地山掘削機1で既設トンネル3の外周部を掘削する際は、距離センサー10〜13で既設トンネル3との距離を測定して、ピッチング及びローリングを算出するとともに、受信器30〜33でγ線の強度を測定して、第1基準線L1に対する第2基準線L2のずれ量を算出する。そして、ピッチング、ローリング及び第1基準線L1に対するずれ量が設計等により定められた範囲内である場合は、そのまま地山掘削機1を推進させる。しかし、ピッチング、ローリング、第1基準線L1に対するずれ量の何れかが設計等により定められている範囲外の場合は、シールドジャッキや中折れジャッキ等を調整して地山掘削機1の姿勢を修正する。
【0074】
以上説明した本実施形態における位置検出システム2によれば、既設トンネル3の周方向に設定された第1基準線L1に沿って地山掘削機1を推進させることができるので、既設トンネル3の周囲を正確に掘削することができる。したがって、地山掘削機1を発進立坑6に精度良く到達させることができる。
【0075】
なお、上述した各実施形態において、距離センサー10〜13として、渦電流式センサーを用いたが、これに限定されるものではなく、超音波センサーや電磁波センサーを用いてもよい。要は、測定用の信号を発信し、既設トンネル3までの距離を測定可能な機能を備えたものであればよい。
【0076】
また、上述した各実施形態において、発信器20〜27として、γ線放出器を用いたが、これに限定されるものではなく、鋼製セグメントから構成された(或いは鋼板を含む)既設トンネル3の外殻3aを透過可能な性質を有する信号を発信する機能を備えたものであればよい。
【0077】
また、上述した各実施形態において、第1基準線L1に対する第2基準線L2のずれ量を測定しながら地山掘削機1を推進させる場合について説明したが、既設トンネル3に対して新設トンネル4の深度方向の位置を測定する必要がない場合には、発信器20〜27及び受信器30〜33によるずれ量の測定を省略して、距離センサー10〜13のみによる距離の測定を行ってもよい。
【符号の説明】
【0078】
1 地山掘削機
1a 外殻
2 位置検出システム
3 既設トンネル
3a 外殻
4 新設トンネル
6 発進立坑
10〜13 距離センサー
20〜27 発信器
30〜33 受信器
L1 第1基準線
L2 第2基準線
【特許請求の範囲】
【請求項1】
既設トンネルに近接するトンネルを構築する際に、前記既設トンネルを基準とした、前記トンネルを掘削するための地山掘削機の位置を検出する地山掘削機の位置検出システムであって、
前記既設トンネルに向かって発信する所定の信号に起因して、前記既設トンネルまでの距離に応じて生じる信号を受信し、前記既設トンネルまでの距離を測定可能な距離センサーを備えることを特徴とする地山掘削機の位置検出システム。
【請求項2】
前記距離センサーは、進行方向に沿って所定の間隔をおいて複数配置されていることを特徴とする請求項1に記載の地山掘削機の位置検出システム。
【請求項3】
前記距離センサーは、進行方向に対して直交する向きに沿って所定の間隔をおいて複数配置されていることを特徴とする請求項1又は2に記載の地山掘削機の位置検出システム。
【請求項4】
請求項1〜3のうち、何れか1項に記載された地山掘削機の位置検出システムを備えることを特徴とする地山掘削機。
【請求項1】
既設トンネルに近接するトンネルを構築する際に、前記既設トンネルを基準とした、前記トンネルを掘削するための地山掘削機の位置を検出する地山掘削機の位置検出システムであって、
前記既設トンネルに向かって発信する所定の信号に起因して、前記既設トンネルまでの距離に応じて生じる信号を受信し、前記既設トンネルまでの距離を測定可能な距離センサーを備えることを特徴とする地山掘削機の位置検出システム。
【請求項2】
前記距離センサーは、進行方向に沿って所定の間隔をおいて複数配置されていることを特徴とする請求項1に記載の地山掘削機の位置検出システム。
【請求項3】
前記距離センサーは、進行方向に対して直交する向きに沿って所定の間隔をおいて複数配置されていることを特徴とする請求項1又は2に記載の地山掘削機の位置検出システム。
【請求項4】
請求項1〜3のうち、何れか1項に記載された地山掘削機の位置検出システムを備えることを特徴とする地山掘削機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−102546(P2012−102546A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2010−252131(P2010−252131)
【出願日】平成22年11月10日(2010.11.10)
【出願人】(000000549)株式会社大林組 (1,758)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成22年11月10日(2010.11.10)
【出願人】(000000549)株式会社大林組 (1,758)
【Fターム(参考)】
[ Back to top ]