
地山状況予測方法

【課題】日常の施工管理として、簡易に切羽前方の地山の状況を予測しつつトンネルの掘進を行うことが可能な地山状況予測方法およびトンネル掘削方法を提案する。
【解決手段】第一の計測断面に切羽側計測点を設定するとともに、切羽側計測点から坑口側に距離aだけ離れた坑口側計測点を設定する作業と、切羽側計測点と坑口側計測点との位置関係である初期値を計測する作業と、切羽Kが計測断面から距離bだけ離れた位置に到達した段階で、切羽側計測点と坑口側計測点との位置関係である計測値を計測する作業と、初期値と計測値との差である相対変位を算出する作業とを行う第一工程と、切羽Kが第二の計測断面を通過後、第一工程と同様に相対変位を算出する第二工程とを備え、第一工程で算出した相対変位と第二工程で算出した相対変位との比較に基づいて、切羽Kより前方の地山状況を予測する。
【解決手段】第一の計測断面に切羽側計測点を設定するとともに、切羽側計測点から坑口側に距離aだけ離れた坑口側計測点を設定する作業と、切羽側計測点と坑口側計測点との位置関係である初期値を計測する作業と、切羽Kが計測断面から距離bだけ離れた位置に到達した段階で、切羽側計測点と坑口側計測点との位置関係である計測値を計測する作業と、初期値と計測値との差である相対変位を算出する作業とを行う第一工程と、切羽Kが第二の計測断面を通過後、第一工程と同様に相対変位を算出する第二工程とを備え、第一工程で算出した相対変位と第二工程で算出した相対変位との比較に基づいて、切羽Kより前方の地山状況を予測する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、切羽前方の地山状況を予測する地山状況予測方法に関する。
【背景技術】
【0002】
山岳トンネルの施工において、事前に切羽前方の地山の状態を把握することができれば、掘削をより安全かつより経済的に実施することが可能になる。
【0003】
トンネルの施工では、計画や設計の段階において、地表踏査や地表面からの弾性波探査などの地盤調査を実施することで、事前に地山状況の予測を行っているが、地表面からの事前調査では、線状構造物であるトンネルの地山状況を完全に把握することは困難であった。
【0004】
そのため、施工段階で地山状況の観察や計測を実施し、事前の設計や施工法を適宜修正しながら、施工の安全性や経済性を確保する方法(いわゆる情報化施工)が標準的に行われている。
【0005】
また、事前の地盤調査結果により、断層破砕帯や高圧湧水帯などの不良地山部が存在する可能性が高いと判断される領域を掘削する場合には、施工段階において切羽前方の不良地山部の正確な位置や規模、強度特性などを把握するために、先進ボーリングや坑内弾性波探査などの調査を実施することがある。
【0006】
このような情報化施工や日常の施工管理を目的として、トンネル縦断方向に一定の間隔で、天端沈下計測や内空変位計測に代表される坑内変位計測を実施することが標準的に行われている。坑内変位計測には、トータルステーションを利用することが一般的となっている。トータルステーションを利用することで、トンネル横断方向と鉛直方向のみならず、トンネル軸方向の変位を比較的容易に得ることができる。
【0007】
例えば、非特許文献1には、これらの変位量の増減の傾向により切羽前方の地山の状態を予測する方法が開示されている。
また、特許文献1には、トンネル軸方向変位、トンネル横断鉛直方向およびトンネル横断水平方向の三次元方向の計測結果を用いて、切羽前方での弱い地層帯の有無を判断する手法が開示されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第3856392号公報
【非特許文献】
【0009】
【非特許文献1】W.Schubert他,「The importance of longitudinal deformation in tunnel excavation」,「Proceedings of the 8th International Congress on Rock Mechanics,Tokyo,Japan,1995 Volume 3」,Netherlands,A.A.Balkema,1995,p.1411−1414
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、先進ボーリングや坑内弾性波探査は、切羽近傍での作業となり、トンネルの掘削作業を中断する必要があるため、全体工期に影響を及ぼす原因となる。また、多くの段取りと手間を要するため、日常の施工管理の一環として実施するのは困難であった。
【0011】
トータルステーションを用いた変位計測は、計測時に測量作業を伴い、少なからず掘削作業を中断する必要があるため、計測の頻度や計測の間隔を密に行い、より高精度な計測を実施しようとすると、全体工期に影響を及ぼすおそれがあった。
【0012】
坑内変位計測には、比較的高精度なトータルステーションが用いられるが、距離の測定精度は3mm程度である。そのため、計測変位がそれより小さい場合には、計測誤差により地山の変位挙動を捉えることができないことがあった。
【0013】
本発明は、前記の問題点を解決することを目的とするものであり、簡易にかつ高精度に切羽前方の地山の状況を予測しつつトンネルの掘進を行うことが可能な地山状況予測方法を提案することを課題とする。
【課題を解決するための手段】
【0014】
前記課題を解決するために、本発明の地山状況予測方法は、第一の計測断面に切羽側計測点を設定するとともに前記切羽側計測点から坑口側に距離aだけ離れた坑口側計測点を設定する作業と、前記切羽側計測点と前記坑口側計測点との位置関係である初期値を計測する作業と、切羽が前記計測断面から距離bだけ離れた位置に到達した段階で、前記切羽側計測点と前記坑口側計測点との位置関係である計測値を計測する作業と、前記初期値と前記計測値との差である相対変位を算出する作業とを行う第一工程と、切羽が第二の計測断面を通過後、前記第一工程と同様に相対変位を算出する第二工程とを備え、前記第一工程で算出した相対変位と前記第二工程で算出した相対変位との比較に基づいて、切羽より前方の地山状況を予測することを特徴としている。
【0015】
前記地山状況予測では、前記第二工程で算出した相対変位が前記第一工程で算出した相対変位よりも圧縮側に大きくなる場合に切羽より前方に軟弱層が存在すると予測し、前記第二工程で算出した相対変位が前記第一工程で算出した相対変位よりも引張側に大きくなる場合に切羽より前方に堅硬層が存在すると予測すればよい。
【0016】
かかる地山状況予測方法によれば、切羽前方の地山の状況を予め把握することができるため、地山状況に応じた施工方法によるトンネルの掘進が可能となり、より安全かつ経済的な施工が可能となる。
2点間におけるトンネル軸方向の相対変位を計測するため、より高精度な計測機器を利用することが可能なため、高精度に測定することができる。
【発明の効果】
【0017】
本発明の地山状況予測方法によれば、簡易かつ高精度に切羽前方の地山の状況を予測しつつトンネルの掘進を行うことが可能となる。
【図面の簡単な説明】
【0018】
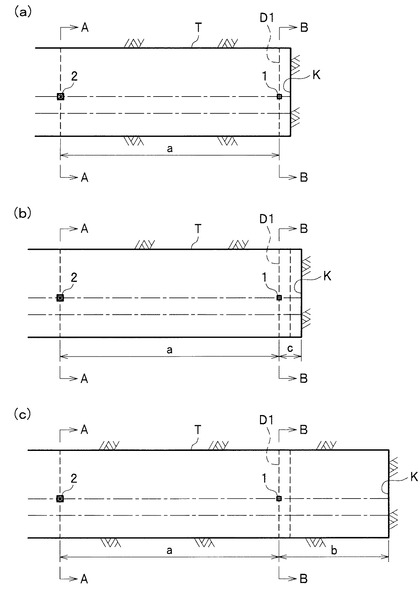
【図1】(a)〜(c)は、本実施形態に係る地山状況予測方法の各段階を示す縦断面図である。
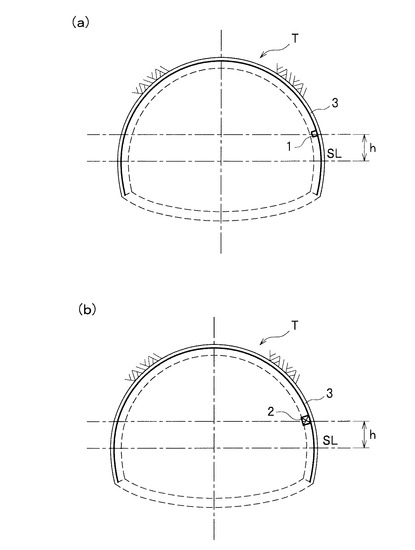
【図2】(a)はターゲットの設置状況を示す横断面図、(b)はレーザー変位計の設置状況を示す横断面図である。
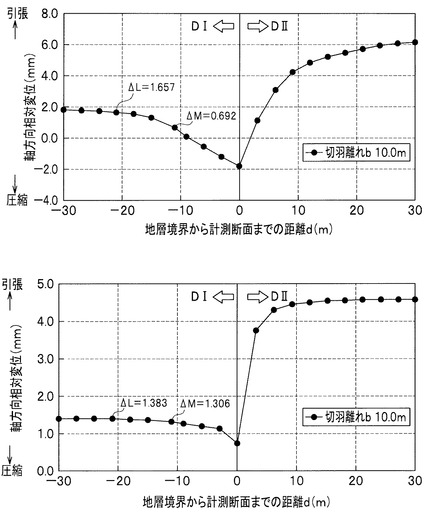
【図3】堅硬層から軟弱層に変化する地層境界を備える地山を掘削する場合の解析結果を示す図であって、(a)は計測距離20mのときの軸方向相対変位と計測断面から地層境界までの距離との関係を示す図であり、(b)は計測距離1mのときの軸方向相対変位と計測断面から地層境界までの距離との関係を示す図である。
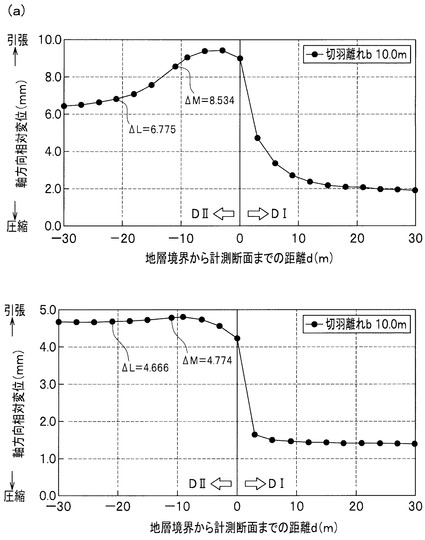
【図4】軟弱層から堅硬層に変化する地層境界を備える地山を掘削する場合の解析結果を示す図であって、(a)は計測距離20mのときの軸方向相対変位と計測断面から地層境界までの距離との関係を示す図であり、(b)は計測距離1mのときの軸方向相対変位と計測断面から地層境界までの距離との関係を示す図である。
【発明を実施するための形態】
【0019】
本発明の実施の形態について、図面を参照して説明する。
本実施形態のトンネルの掘削方法は、地山状況予測方法により切羽K前方の地山の状況を予測した上で、トンネルTの掘進を行うものである。
【0020】
地山状況予測方法は、図1に示すように、トンネルTの坑内に設置された二点間の相対変位を計測し、掘進に伴う相対変位の変化により切羽K前方の地山状況を予測するものであって、第一工程と、第二工程と、地山予測工程とを備えている。
第一工程は、第一設置作業、第一初期値計測作業、第一計測作業、第一算出作業を備えている。また、第二工程は、第二設置作業、第二初期値測定作業、第二測定作業、第二算出作業を備えている。
【0021】
第一設置作業では、図1(a)に示すように、計測断面D1(第一の計測断面)に第一切羽側計測点を設定するとともに、第一切羽側計測点から坑口側(切羽Kと反対側)に距離aだけ離れた第一坑口側計測点を設定する。
【0022】
本実施形態では、切羽Kが、計測断面D1よりも前方1mの位置に達した段階で、第一切羽側計測点にターゲット1を設置し、第一坑口側計測点にレーザー変位計2を設置する。なお、ターゲット1を設置するタイミングは、切羽Kが計測断面D1を通過した以降であれば限定されるものではない。また、レーザー変位計2を設置するタイミングは、切羽Kが第一坑口側計測点を通過した以降であれば、限定されるものではない。
【0023】
ターゲット1は、図2(a)に示すように、トンネルTの吹付けコンクリート3の表面に固定する。本実施形態では、トンネルTのスプリングラインSLから所定高さh(本実施形態では1.5m)上方に設置する。なお、ターゲット1の設置箇所は限定されるものではなく、トンネルTの天端でもいいし、側壁部でもよい。また、ターゲット1は必ずしも吹付けコンクリート3に取り付ける必要は無く、例えば、地山壁面や鋼製支保工に取り付けても良い。
【0024】
レーザー変位計2は、図2(b)に示すように、トンネルTの吹付けコンクリート3の表面に固定する。本実施形態では、ターゲット1と同様に、トンネルTのスプリングラインSLから所定高さh(本実施形態では1.5m)上方に設置する。なお、レーザー変位計2の設置箇所は限定されるものではないが、ターゲット1とレーザー変位計2を結ぶ直線が、トンネル軸線と平行になるように設置するのが望ましい。
【0025】
第一初期値計測作業では、第一切羽側計測点(ターゲット1)と第一坑口側計測点(レーザー変位計2)との位置関係(離隔距離)の初期値(第一初期値)L0を計測する。
【0026】
第一初期値L0の計測は、ターゲット1とレーザー変位計2を設置した直後に行うことを基本とする。なお、地山予測を適切に行うためには、切羽Kが計測断面D1を通過後できるだけ早い段階で初期値L0の計測を実施することが望ましい。
【0027】
第一計測作業では、図1(c)に示すように、トンネルTをさらに掘り進めるとともにターゲット1とレーザー変位計2との離隔距離(第一計測値)Lnを計測する。本実施形態では、トンネルTを掘り進めて、切羽Kと計測断面D1との離れが所定の距離b(b1,b2,…)になった段階(例えば1m掘進する毎)で第一計測値Ln(L1,L2,…)を計測する。
【0028】
第一計測値Lnの計測は、切羽側計測点D1と切羽Kとの離れが一定の距離(例えば20m)になるまで行う。なお、第一計測値Lnの計測は、計測断面D1と切羽Kとの距離が大きくなり、後記する第一相対変位ΔLがほぼ一定値になったと認められるまで行ってもよい。
【0029】
第一算出作業では、第一初期値L0と第一計測値Lnとを比較して第一相対変位ΔLn(軸方向相対変位)を算出する(式1参照)。なお、ΔLnが正の時を引張側の軸方向相対変位、ΔLnが負の時を圧縮側の軸方向相対変位と称す。
ΔLn=Ln−L0 ・・・ 式1
【0030】
第二設置作業では、切羽Kが第二の計測断面(計測断面D1)を通過後、計測断面D1に第二切羽側計測点を設定するとともに、第二切羽側計測点から坑口側に距離aだけ離れた第二坑口側計測点を設定する。
【0031】
本実施形態では、図1(a)に示すように、切羽Kが、計測断面D1よりも前方1mの位置に達した段階で、第二切羽計測点にターゲット1を設置し、第二坑口側計測点にレーザー変位計2を設置する。なお、ターゲット1を設置するタイミングは、切羽Kが第二計測断面を通過した以降であれば限定されるものではない。レーザー変位計2を設置するタイミングは、切羽が第二坑口側計測点を通過した以降であれば限定されるものではない。
なお、ターゲット1およびレーザー変位計2の設置方法は、第一切羽側計測点および第一坑口側計測点にターゲット1およびレーザー変位計2を設置した方法と同様に行う。
【0032】
第二初期値M0の計測は、ターゲット1とレーザー変位計2を設置した直後に行うことを基本とする。なお、第二初期値M0を計測する際のタイミングは、限定されるものではないが、第二計測断面から切羽Kまでの距離cが、第一初期値L0を計測する際の第一計測断面から切羽Kまでの距離cと同じであることが望ましい(図1(b)参照)。
【0033】
第二計測作業では、図1(c)に示すように、トンネルTをさらに掘り進めるとともに、切羽Kと計測断面D1との離れが距離bになった段階でターゲット1とレーザー変位計2との離隔距離(第二計測値)Mnを計測する。本実施形態では、切羽Kと計測断面D1の離れが距離b(b1,b2,…)になった段階(例えば1m掘進する毎)で第二計測値Mn(M1,M2,…)を計測する。なお、第二計測値Mnを計測するタイミングは、第一計測値Lnを計測するタイミングと同様とすることが望ましい。
【0034】
第二計測値Mnの計測は、第二切羽側計測点と切羽Kとの距離が一定の距離(例えば20m)になるまで行う。なお、第二計測値Mnの計測は、計測断面D1と切羽Kとの距離が大きくなり、後記する第二相対変位ΔMがほぼ一定値になったと認められるまで行ってもよい。
【0035】
第二算出作業では、第二初期値M0と第二計測値Mnとを比較して第二相対変位(軸方向相対変位)ΔMnを算出する(式3参照)。
ΔMn=Mn−M0 ・・・ 式3
【0036】
地山予測工程は、第一の工程で算出した第一相対変位ΔLnと第二の工程で算出した第二相対変位ΔMnとの差に基づいて、切羽Kよりも前方の地山状況を予測する工程である。
なお、地山状況の予測に使用する第一相対変位ΔLnおよび第二相対変位ΔMnは、それぞれ計測時の切羽Kからの離れが同じ距離b(例えば距離b=10m)の場合の計測値Ln,Mnを使用する。
【0037】
第二相対変位ΔMnが第一相対変位ΔLnよりも圧縮側に大きくなる場合(ΔLn>ΔMn)は、切羽Kより前方に軟弱層が存在すると予測し、第二相対変位ΔMnが第一相対変位ΔLnよりも引張側に大きくなる場合(ΔLn<ΔMn)には、切羽Kより前方に堅硬層が存在すると予測する。
【0038】
以後、第二工程(第二設置作業、第二初期値計測作業、第二計測作業、第二算出作業)および地山予測工程を繰り返し行う。なお、第二工程を複数回実施した場合には、地山予測工程において、既存の相対変位の中から選ばれた一または複数の相対変位と最新の相対変位とを利用すればよい。
【0039】
地山予測工程において、切羽Kの前方の地山に、軟弱層の存在が予測された場合には、必要に応じて先進ボーリングや坑内弾性波探査等などの切羽前方地山探査や、先受け工や鏡ボルト等の補助工法や対策工を実施する。
【0040】
以上、本実施形態の地山状況予測方法によれば、トンネルTの内部に設置された2点の軸方向相対変位を計測することで、簡易に切羽Kの前方の地山状況を予測することができる。また、トンネル掘削作業を中断することがないため、切羽Kの前方の地山状況の予測を日常の施工管理として実施することが可能である。
【0041】
ターゲット1およびレーザー変位計2の設置は、一次支保の施工と同時に行うことが可能なため、トンネルTの掘削作業に影響を与えることはない。
【0042】
軟弱層の存在が予測される位置において、先進ボーリングや坑内弾性波探査等などの切羽前方地山探査を実施すれば、切羽Kの前方の軟弱層の正確な位置、層厚、強度特性を把握することができる。切羽Kの前方地山探査の結果に応じて支保パターンの変更や補助工法の採用を予め決定することができるため、施工性に優れている。
【0043】
従来のトータルステーションを利用した坑内変位計測と切羽前方地山予測手法は、計測時に、測量作業を伴い、少なからず掘削作業を中断する必要があるため、計測頻度や計測間隔を密にすることができない場合があった。一方、本実施形態の地山状況予測方法によれば、レーザー変位計の設置後は、自動計測が可能であるため、トンネルTの掘削作業を中断することなく測定することが可能である。
また、トータルステーションと比較して高精度に測定することができるため、予測精度も高い。
【0044】
以上、本発明について、好適な実施形態について説明した。しかし、本発明は、前述の各実施形態に限られず、前記の各構成要素については、本発明の趣旨を逸脱しない範囲で、適宜変更が可能である。
【0045】
例えば、前記実施形態では、レーザー変位計を使用する場合について説明したが、2点の相対変位の測定を高精度に計測することが可能であれば、計測器はレーザー変位計に限定されるものではなく、例えば、伸縮計等も使用可能である。
【0046】
また、トンネルTの断面形状等も限定されるものではない。
【実施例】
【0047】
次に、本発明にかかる地山状況予測方法について検証した結果について説明する。
本検証は、トンネル側面における2点間のトンネル軸方向相対変位の変化を計測することにより、切羽前方の地山状況(地山の硬軟)を予測できることを三次元逐次掘削解析により検証した。
【0048】
地盤は、線形弾性モデルとし、堅硬層として地山等級DI、軟弱層として地山等級DIIと仮定し、堅硬層から軟弱層に変化する地層境界を備えるモデルとした。解析用地盤物性値は、トンネル数値解析マニュアル(日本道路公団、1998年)などを参照して、各地山等級の代表値を採用した。表1に解析用地盤物性値を示す。
また、初期地圧は、トンネル天端位置に、土被り100m相当の地圧が作用するものとし、側圧係数は1.0とした。
【0049】
【表1】

【0050】
解析では、1m毎に掘進するものとし、上半・下半を同時に掘削するものとした。なお、一次支保(吹付けコンクリート、鋼製支保工、ロックボルト)はモデル化していない。
【0051】
地層境界を貫通するトンネルについて、地層境界におけるトンネル内に設置した2点(切羽側計測点および坑口側計測点)の相対変位の変化を算出した。
2点間の距離(計測距離a)を20mとして、切羽から切羽側計測点までの距離bが10m場合における相対変位の変化を算出した。
【0052】
図3(a)に、本解析モデルにおける、トンネル掘進にともなう2点間の相対変位の解析結果を示す。ただし、図3(a)では、引張を正とし圧縮を負としている。
【0053】
図3(a)に示すように、切羽が地層境界(横軸の0)に達するまでに、軸方向相対変位が圧縮側に大きく変化することがわかる。例えば、計測断面から地層境界までの距離dが21m(切羽Kから地層境界までの距離eが11m)の場合は第一相対変位ΔLが1.657mm、距離dが11m(距離e=1m)では第二相対変位ΔMが0.692mmとなり、軸方向相対変位(ΔL−ΔM)が圧縮側に0.965mm大きくなっている。
【0054】
ここで、高精度レーザー変位計の精度は、±0.2mm程度であるため、軸方向相対変位の差(ΔL−ΔM)を捉えることは十分に可能である。したがって、レーザー変位計を用いて軸方向相対変位を計測することで、堅硬層から軟弱層に変化する地層において切羽前方の地山を予測できることが実証された。
【0055】
図3(b)に、同解析モデルについて、計測距離aを1mとした場合における相対変位の変化を算出した結果を示す。
図3(b)に示すように、距離dが21m(距離e=11m)の場合は第一相対変位ΔLが1.383mm、距離dが11m(距離e=1m)では第二相対変位ΔMが1.306mmとなり、軸方向相対変位(ΔL−ΔM)が圧縮側に0.077mm大きくなっている。
【0056】
ここで、伸縮計の分解能は0.01mmであるから、伸縮計を用いることで、軸方向相対変位の差(ΔL−ΔM)を捉えることは十分に可能である。
【0057】
図4には、軟弱層DIIから堅硬層DIに変化する地層境界を備える解析モデルについて、相対変位の変化を解析した結果を示す。
【0058】
図4(a)に示すように、計測距離aが20mの場合での軸方向相対変位は、距離dが21m(距離e=11m)での第一相対変位ΔLが6.775mmであったのに対し、距離dが11m(距離e=1m)の第二相対変位ΔMが8.534mmであった。
したがって、切羽の前方の堅硬層の影響を受けて、軸方向相対変位(ΔL−ΔM)が引張側に1.759mm大きくなることがわかる。
【0059】
また、図4(b)に示すように、計測距離bが1mの場合でも、距離dが21m(距離e=11m)の第一相対変位ΔLが4.666mmであったのに対し、距離dが11m(距離e=1m)の第二相対変位ΔMが4.774であった。したがって、切羽の前方の堅硬層の影響を受けて、軸方向相対変位(ΔL−ΔM)が引張側に0.108mm大きくなることがわかる。
【0060】
したがって、本発明の地山状況予測方法によれば、トンネル坑内に設けられた2点間の軸方向相対変位を利用することで、切羽Kの前方の堅硬層または軟弱層の有無を予測が可能であることが実証された。
【符号の説明】
【0061】
1 ターゲット
2 レーザー変位計
K 切羽
T トンネル
【技術分野】
【0001】
本発明は、切羽前方の地山状況を予測する地山状況予測方法に関する。
【背景技術】
【0002】
山岳トンネルの施工において、事前に切羽前方の地山の状態を把握することができれば、掘削をより安全かつより経済的に実施することが可能になる。
【0003】
トンネルの施工では、計画や設計の段階において、地表踏査や地表面からの弾性波探査などの地盤調査を実施することで、事前に地山状況の予測を行っているが、地表面からの事前調査では、線状構造物であるトンネルの地山状況を完全に把握することは困難であった。
【0004】
そのため、施工段階で地山状況の観察や計測を実施し、事前の設計や施工法を適宜修正しながら、施工の安全性や経済性を確保する方法(いわゆる情報化施工)が標準的に行われている。
【0005】
また、事前の地盤調査結果により、断層破砕帯や高圧湧水帯などの不良地山部が存在する可能性が高いと判断される領域を掘削する場合には、施工段階において切羽前方の不良地山部の正確な位置や規模、強度特性などを把握するために、先進ボーリングや坑内弾性波探査などの調査を実施することがある。
【0006】
このような情報化施工や日常の施工管理を目的として、トンネル縦断方向に一定の間隔で、天端沈下計測や内空変位計測に代表される坑内変位計測を実施することが標準的に行われている。坑内変位計測には、トータルステーションを利用することが一般的となっている。トータルステーションを利用することで、トンネル横断方向と鉛直方向のみならず、トンネル軸方向の変位を比較的容易に得ることができる。
【0007】
例えば、非特許文献1には、これらの変位量の増減の傾向により切羽前方の地山の状態を予測する方法が開示されている。
また、特許文献1には、トンネル軸方向変位、トンネル横断鉛直方向およびトンネル横断水平方向の三次元方向の計測結果を用いて、切羽前方での弱い地層帯の有無を判断する手法が開示されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第3856392号公報
【非特許文献】
【0009】
【非特許文献1】W.Schubert他,「The importance of longitudinal deformation in tunnel excavation」,「Proceedings of the 8th International Congress on Rock Mechanics,Tokyo,Japan,1995 Volume 3」,Netherlands,A.A.Balkema,1995,p.1411−1414
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、先進ボーリングや坑内弾性波探査は、切羽近傍での作業となり、トンネルの掘削作業を中断する必要があるため、全体工期に影響を及ぼす原因となる。また、多くの段取りと手間を要するため、日常の施工管理の一環として実施するのは困難であった。
【0011】
トータルステーションを用いた変位計測は、計測時に測量作業を伴い、少なからず掘削作業を中断する必要があるため、計測の頻度や計測の間隔を密に行い、より高精度な計測を実施しようとすると、全体工期に影響を及ぼすおそれがあった。
【0012】
坑内変位計測には、比較的高精度なトータルステーションが用いられるが、距離の測定精度は3mm程度である。そのため、計測変位がそれより小さい場合には、計測誤差により地山の変位挙動を捉えることができないことがあった。
【0013】
本発明は、前記の問題点を解決することを目的とするものであり、簡易にかつ高精度に切羽前方の地山の状況を予測しつつトンネルの掘進を行うことが可能な地山状況予測方法を提案することを課題とする。
【課題を解決するための手段】
【0014】
前記課題を解決するために、本発明の地山状況予測方法は、第一の計測断面に切羽側計測点を設定するとともに前記切羽側計測点から坑口側に距離aだけ離れた坑口側計測点を設定する作業と、前記切羽側計測点と前記坑口側計測点との位置関係である初期値を計測する作業と、切羽が前記計測断面から距離bだけ離れた位置に到達した段階で、前記切羽側計測点と前記坑口側計測点との位置関係である計測値を計測する作業と、前記初期値と前記計測値との差である相対変位を算出する作業とを行う第一工程と、切羽が第二の計測断面を通過後、前記第一工程と同様に相対変位を算出する第二工程とを備え、前記第一工程で算出した相対変位と前記第二工程で算出した相対変位との比較に基づいて、切羽より前方の地山状況を予測することを特徴としている。
【0015】
前記地山状況予測では、前記第二工程で算出した相対変位が前記第一工程で算出した相対変位よりも圧縮側に大きくなる場合に切羽より前方に軟弱層が存在すると予測し、前記第二工程で算出した相対変位が前記第一工程で算出した相対変位よりも引張側に大きくなる場合に切羽より前方に堅硬層が存在すると予測すればよい。
【0016】
かかる地山状況予測方法によれば、切羽前方の地山の状況を予め把握することができるため、地山状況に応じた施工方法によるトンネルの掘進が可能となり、より安全かつ経済的な施工が可能となる。
2点間におけるトンネル軸方向の相対変位を計測するため、より高精度な計測機器を利用することが可能なため、高精度に測定することができる。
【発明の効果】
【0017】
本発明の地山状況予測方法によれば、簡易かつ高精度に切羽前方の地山の状況を予測しつつトンネルの掘進を行うことが可能となる。
【図面の簡単な説明】
【0018】
【図1】(a)〜(c)は、本実施形態に係る地山状況予測方法の各段階を示す縦断面図である。
【図2】(a)はターゲットの設置状況を示す横断面図、(b)はレーザー変位計の設置状況を示す横断面図である。
【図3】堅硬層から軟弱層に変化する地層境界を備える地山を掘削する場合の解析結果を示す図であって、(a)は計測距離20mのときの軸方向相対変位と計測断面から地層境界までの距離との関係を示す図であり、(b)は計測距離1mのときの軸方向相対変位と計測断面から地層境界までの距離との関係を示す図である。
【図4】軟弱層から堅硬層に変化する地層境界を備える地山を掘削する場合の解析結果を示す図であって、(a)は計測距離20mのときの軸方向相対変位と計測断面から地層境界までの距離との関係を示す図であり、(b)は計測距離1mのときの軸方向相対変位と計測断面から地層境界までの距離との関係を示す図である。
【発明を実施するための形態】
【0019】
本発明の実施の形態について、図面を参照して説明する。
本実施形態のトンネルの掘削方法は、地山状況予測方法により切羽K前方の地山の状況を予測した上で、トンネルTの掘進を行うものである。
【0020】
地山状況予測方法は、図1に示すように、トンネルTの坑内に設置された二点間の相対変位を計測し、掘進に伴う相対変位の変化により切羽K前方の地山状況を予測するものであって、第一工程と、第二工程と、地山予測工程とを備えている。
第一工程は、第一設置作業、第一初期値計測作業、第一計測作業、第一算出作業を備えている。また、第二工程は、第二設置作業、第二初期値測定作業、第二測定作業、第二算出作業を備えている。
【0021】
第一設置作業では、図1(a)に示すように、計測断面D1(第一の計測断面)に第一切羽側計測点を設定するとともに、第一切羽側計測点から坑口側(切羽Kと反対側)に距離aだけ離れた第一坑口側計測点を設定する。
【0022】
本実施形態では、切羽Kが、計測断面D1よりも前方1mの位置に達した段階で、第一切羽側計測点にターゲット1を設置し、第一坑口側計測点にレーザー変位計2を設置する。なお、ターゲット1を設置するタイミングは、切羽Kが計測断面D1を通過した以降であれば限定されるものではない。また、レーザー変位計2を設置するタイミングは、切羽Kが第一坑口側計測点を通過した以降であれば、限定されるものではない。
【0023】
ターゲット1は、図2(a)に示すように、トンネルTの吹付けコンクリート3の表面に固定する。本実施形態では、トンネルTのスプリングラインSLから所定高さh(本実施形態では1.5m)上方に設置する。なお、ターゲット1の設置箇所は限定されるものではなく、トンネルTの天端でもいいし、側壁部でもよい。また、ターゲット1は必ずしも吹付けコンクリート3に取り付ける必要は無く、例えば、地山壁面や鋼製支保工に取り付けても良い。
【0024】
レーザー変位計2は、図2(b)に示すように、トンネルTの吹付けコンクリート3の表面に固定する。本実施形態では、ターゲット1と同様に、トンネルTのスプリングラインSLから所定高さh(本実施形態では1.5m)上方に設置する。なお、レーザー変位計2の設置箇所は限定されるものではないが、ターゲット1とレーザー変位計2を結ぶ直線が、トンネル軸線と平行になるように設置するのが望ましい。
【0025】
第一初期値計測作業では、第一切羽側計測点(ターゲット1)と第一坑口側計測点(レーザー変位計2)との位置関係(離隔距離)の初期値(第一初期値)L0を計測する。
【0026】
第一初期値L0の計測は、ターゲット1とレーザー変位計2を設置した直後に行うことを基本とする。なお、地山予測を適切に行うためには、切羽Kが計測断面D1を通過後できるだけ早い段階で初期値L0の計測を実施することが望ましい。
【0027】
第一計測作業では、図1(c)に示すように、トンネルTをさらに掘り進めるとともにターゲット1とレーザー変位計2との離隔距離(第一計測値)Lnを計測する。本実施形態では、トンネルTを掘り進めて、切羽Kと計測断面D1との離れが所定の距離b(b1,b2,…)になった段階(例えば1m掘進する毎)で第一計測値Ln(L1,L2,…)を計測する。
【0028】
第一計測値Lnの計測は、切羽側計測点D1と切羽Kとの離れが一定の距離(例えば20m)になるまで行う。なお、第一計測値Lnの計測は、計測断面D1と切羽Kとの距離が大きくなり、後記する第一相対変位ΔLがほぼ一定値になったと認められるまで行ってもよい。
【0029】
第一算出作業では、第一初期値L0と第一計測値Lnとを比較して第一相対変位ΔLn(軸方向相対変位)を算出する(式1参照)。なお、ΔLnが正の時を引張側の軸方向相対変位、ΔLnが負の時を圧縮側の軸方向相対変位と称す。
ΔLn=Ln−L0 ・・・ 式1
【0030】
第二設置作業では、切羽Kが第二の計測断面(計測断面D1)を通過後、計測断面D1に第二切羽側計測点を設定するとともに、第二切羽側計測点から坑口側に距離aだけ離れた第二坑口側計測点を設定する。
【0031】
本実施形態では、図1(a)に示すように、切羽Kが、計測断面D1よりも前方1mの位置に達した段階で、第二切羽計測点にターゲット1を設置し、第二坑口側計測点にレーザー変位計2を設置する。なお、ターゲット1を設置するタイミングは、切羽Kが第二計測断面を通過した以降であれば限定されるものではない。レーザー変位計2を設置するタイミングは、切羽が第二坑口側計測点を通過した以降であれば限定されるものではない。
なお、ターゲット1およびレーザー変位計2の設置方法は、第一切羽側計測点および第一坑口側計測点にターゲット1およびレーザー変位計2を設置した方法と同様に行う。
【0032】
第二初期値M0の計測は、ターゲット1とレーザー変位計2を設置した直後に行うことを基本とする。なお、第二初期値M0を計測する際のタイミングは、限定されるものではないが、第二計測断面から切羽Kまでの距離cが、第一初期値L0を計測する際の第一計測断面から切羽Kまでの距離cと同じであることが望ましい(図1(b)参照)。
【0033】
第二計測作業では、図1(c)に示すように、トンネルTをさらに掘り進めるとともに、切羽Kと計測断面D1との離れが距離bになった段階でターゲット1とレーザー変位計2との離隔距離(第二計測値)Mnを計測する。本実施形態では、切羽Kと計測断面D1の離れが距離b(b1,b2,…)になった段階(例えば1m掘進する毎)で第二計測値Mn(M1,M2,…)を計測する。なお、第二計測値Mnを計測するタイミングは、第一計測値Lnを計測するタイミングと同様とすることが望ましい。
【0034】
第二計測値Mnの計測は、第二切羽側計測点と切羽Kとの距離が一定の距離(例えば20m)になるまで行う。なお、第二計測値Mnの計測は、計測断面D1と切羽Kとの距離が大きくなり、後記する第二相対変位ΔMがほぼ一定値になったと認められるまで行ってもよい。
【0035】
第二算出作業では、第二初期値M0と第二計測値Mnとを比較して第二相対変位(軸方向相対変位)ΔMnを算出する(式3参照)。
ΔMn=Mn−M0 ・・・ 式3
【0036】
地山予測工程は、第一の工程で算出した第一相対変位ΔLnと第二の工程で算出した第二相対変位ΔMnとの差に基づいて、切羽Kよりも前方の地山状況を予測する工程である。
なお、地山状況の予測に使用する第一相対変位ΔLnおよび第二相対変位ΔMnは、それぞれ計測時の切羽Kからの離れが同じ距離b(例えば距離b=10m)の場合の計測値Ln,Mnを使用する。
【0037】
第二相対変位ΔMnが第一相対変位ΔLnよりも圧縮側に大きくなる場合(ΔLn>ΔMn)は、切羽Kより前方に軟弱層が存在すると予測し、第二相対変位ΔMnが第一相対変位ΔLnよりも引張側に大きくなる場合(ΔLn<ΔMn)には、切羽Kより前方に堅硬層が存在すると予測する。
【0038】
以後、第二工程(第二設置作業、第二初期値計測作業、第二計測作業、第二算出作業)および地山予測工程を繰り返し行う。なお、第二工程を複数回実施した場合には、地山予測工程において、既存の相対変位の中から選ばれた一または複数の相対変位と最新の相対変位とを利用すればよい。
【0039】
地山予測工程において、切羽Kの前方の地山に、軟弱層の存在が予測された場合には、必要に応じて先進ボーリングや坑内弾性波探査等などの切羽前方地山探査や、先受け工や鏡ボルト等の補助工法や対策工を実施する。
【0040】
以上、本実施形態の地山状況予測方法によれば、トンネルTの内部に設置された2点の軸方向相対変位を計測することで、簡易に切羽Kの前方の地山状況を予測することができる。また、トンネル掘削作業を中断することがないため、切羽Kの前方の地山状況の予測を日常の施工管理として実施することが可能である。
【0041】
ターゲット1およびレーザー変位計2の設置は、一次支保の施工と同時に行うことが可能なため、トンネルTの掘削作業に影響を与えることはない。
【0042】
軟弱層の存在が予測される位置において、先進ボーリングや坑内弾性波探査等などの切羽前方地山探査を実施すれば、切羽Kの前方の軟弱層の正確な位置、層厚、強度特性を把握することができる。切羽Kの前方地山探査の結果に応じて支保パターンの変更や補助工法の採用を予め決定することができるため、施工性に優れている。
【0043】
従来のトータルステーションを利用した坑内変位計測と切羽前方地山予測手法は、計測時に、測量作業を伴い、少なからず掘削作業を中断する必要があるため、計測頻度や計測間隔を密にすることができない場合があった。一方、本実施形態の地山状況予測方法によれば、レーザー変位計の設置後は、自動計測が可能であるため、トンネルTの掘削作業を中断することなく測定することが可能である。
また、トータルステーションと比較して高精度に測定することができるため、予測精度も高い。
【0044】
以上、本発明について、好適な実施形態について説明した。しかし、本発明は、前述の各実施形態に限られず、前記の各構成要素については、本発明の趣旨を逸脱しない範囲で、適宜変更が可能である。
【0045】
例えば、前記実施形態では、レーザー変位計を使用する場合について説明したが、2点の相対変位の測定を高精度に計測することが可能であれば、計測器はレーザー変位計に限定されるものではなく、例えば、伸縮計等も使用可能である。
【0046】
また、トンネルTの断面形状等も限定されるものではない。
【実施例】
【0047】
次に、本発明にかかる地山状況予測方法について検証した結果について説明する。
本検証は、トンネル側面における2点間のトンネル軸方向相対変位の変化を計測することにより、切羽前方の地山状況(地山の硬軟)を予測できることを三次元逐次掘削解析により検証した。
【0048】
地盤は、線形弾性モデルとし、堅硬層として地山等級DI、軟弱層として地山等級DIIと仮定し、堅硬層から軟弱層に変化する地層境界を備えるモデルとした。解析用地盤物性値は、トンネル数値解析マニュアル(日本道路公団、1998年)などを参照して、各地山等級の代表値を採用した。表1に解析用地盤物性値を示す。
また、初期地圧は、トンネル天端位置に、土被り100m相当の地圧が作用するものとし、側圧係数は1.0とした。
【0049】
【表1】
【0050】
解析では、1m毎に掘進するものとし、上半・下半を同時に掘削するものとした。なお、一次支保(吹付けコンクリート、鋼製支保工、ロックボルト)はモデル化していない。
【0051】
地層境界を貫通するトンネルについて、地層境界におけるトンネル内に設置した2点(切羽側計測点および坑口側計測点)の相対変位の変化を算出した。
2点間の距離(計測距離a)を20mとして、切羽から切羽側計測点までの距離bが10m場合における相対変位の変化を算出した。
【0052】
図3(a)に、本解析モデルにおける、トンネル掘進にともなう2点間の相対変位の解析結果を示す。ただし、図3(a)では、引張を正とし圧縮を負としている。
【0053】
図3(a)に示すように、切羽が地層境界(横軸の0)に達するまでに、軸方向相対変位が圧縮側に大きく変化することがわかる。例えば、計測断面から地層境界までの距離dが21m(切羽Kから地層境界までの距離eが11m)の場合は第一相対変位ΔLが1.657mm、距離dが11m(距離e=1m)では第二相対変位ΔMが0.692mmとなり、軸方向相対変位(ΔL−ΔM)が圧縮側に0.965mm大きくなっている。
【0054】
ここで、高精度レーザー変位計の精度は、±0.2mm程度であるため、軸方向相対変位の差(ΔL−ΔM)を捉えることは十分に可能である。したがって、レーザー変位計を用いて軸方向相対変位を計測することで、堅硬層から軟弱層に変化する地層において切羽前方の地山を予測できることが実証された。
【0055】
図3(b)に、同解析モデルについて、計測距離aを1mとした場合における相対変位の変化を算出した結果を示す。
図3(b)に示すように、距離dが21m(距離e=11m)の場合は第一相対変位ΔLが1.383mm、距離dが11m(距離e=1m)では第二相対変位ΔMが1.306mmとなり、軸方向相対変位(ΔL−ΔM)が圧縮側に0.077mm大きくなっている。
【0056】
ここで、伸縮計の分解能は0.01mmであるから、伸縮計を用いることで、軸方向相対変位の差(ΔL−ΔM)を捉えることは十分に可能である。
【0057】
図4には、軟弱層DIIから堅硬層DIに変化する地層境界を備える解析モデルについて、相対変位の変化を解析した結果を示す。
【0058】
図4(a)に示すように、計測距離aが20mの場合での軸方向相対変位は、距離dが21m(距離e=11m)での第一相対変位ΔLが6.775mmであったのに対し、距離dが11m(距離e=1m)の第二相対変位ΔMが8.534mmであった。
したがって、切羽の前方の堅硬層の影響を受けて、軸方向相対変位(ΔL−ΔM)が引張側に1.759mm大きくなることがわかる。
【0059】
また、図4(b)に示すように、計測距離bが1mの場合でも、距離dが21m(距離e=11m)の第一相対変位ΔLが4.666mmであったのに対し、距離dが11m(距離e=1m)の第二相対変位ΔMが4.774であった。したがって、切羽の前方の堅硬層の影響を受けて、軸方向相対変位(ΔL−ΔM)が引張側に0.108mm大きくなることがわかる。
【0060】
したがって、本発明の地山状況予測方法によれば、トンネル坑内に設けられた2点間の軸方向相対変位を利用することで、切羽Kの前方の堅硬層または軟弱層の有無を予測が可能であることが実証された。
【符号の説明】
【0061】
1 ターゲット
2 レーザー変位計
K 切羽
T トンネル
【特許請求の範囲】
【請求項1】
第一の計測断面に切羽側計測点を設定するとともに、前記切羽側計測点から坑口側に距離aだけ離れた坑口側計測点を設定する作業と、
前記切羽側計測点と前記坑口側計測点との位置関係である初期値を計測する作業と、
切羽が前記計測断面から距離bだけ離れた位置に到達した段階で、前記切羽側計測点と前記坑口側計測点との位置関係である計測値を計測する作業と、
前記初期値と前記計測値との差である相対変位を算出する作業と、を行う第一工程と、
切羽が第二の計測断面を通過後、前記第一工程と同様に相対変位を算出する第二工程と、を備え、
前記第一工程で算出した相対変位と前記第二工程で算出した相対変位との比較に基づいて、切羽より前方の地山状況を予測することを特徴とする、地山状況予測方法。
【請求項2】
前記第二工程で算出した相対変位が前記第一工程で算出した相対変位よりも圧縮側に大きくなる場合に、切羽より前方に軟弱層が存在すると予測し、
前記第二工程で算出した相対変位が前記第一工程で算出した相対変位よりも引張側に大きくなる場合に、切羽より前方に堅硬層が存在すると予測することを特徴とする、請求項1に記載の地山状況予測方法。
【請求項1】
第一の計測断面に切羽側計測点を設定するとともに、前記切羽側計測点から坑口側に距離aだけ離れた坑口側計測点を設定する作業と、
前記切羽側計測点と前記坑口側計測点との位置関係である初期値を計測する作業と、
切羽が前記計測断面から距離bだけ離れた位置に到達した段階で、前記切羽側計測点と前記坑口側計測点との位置関係である計測値を計測する作業と、
前記初期値と前記計測値との差である相対変位を算出する作業と、を行う第一工程と、
切羽が第二の計測断面を通過後、前記第一工程と同様に相対変位を算出する第二工程と、を備え、
前記第一工程で算出した相対変位と前記第二工程で算出した相対変位との比較に基づいて、切羽より前方の地山状況を予測することを特徴とする、地山状況予測方法。
【請求項2】
前記第二工程で算出した相対変位が前記第一工程で算出した相対変位よりも圧縮側に大きくなる場合に、切羽より前方に軟弱層が存在すると予測し、
前記第二工程で算出した相対変位が前記第一工程で算出した相対変位よりも引張側に大きくなる場合に、切羽より前方に堅硬層が存在すると予測することを特徴とする、請求項1に記載の地山状況予測方法。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−180675(P2012−180675A)
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願番号】特願2011−43910(P2011−43910)
【出願日】平成23年3月1日(2011.3.1)
【出願人】(000206211)大成建設株式会社 (1,602)
【Fターム(参考)】
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願日】平成23年3月1日(2011.3.1)
【出願人】(000206211)大成建設株式会社 (1,602)
【Fターム(参考)】
[ Back to top ]