
地点案内装置及び地点案内方法
【課題】補機を有した自車両がエネルギ補充施設まで走行不可能となるまでエネルギ残量が減少した場合に、救助車両を待つ間の快適性が低下することを抑制することが可能な地点を案内する地点案内装置及び地点案内方法を提供する。
【解決手段】ナビゲーション装置は、充電施設の位置情報、自車両の現在位置情報、及び自車両の電力残量に基づいて、自車両が充電施設まで走行可能であるか否かを判定する判定手段と、判定手段により自車両が充電施設まで走行可能でないと判定された場合に、自車両の電力残量、自車両の現在位置情報、及び自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、自車両がエアコンの使用を継続した場合に該エアコンが使用不可能となる時点と救助車両が到着する時点との差が最小となる場所を、救助車両を待つための推奨待機場所として自車両の乗員に報知する報知手段とを備える。
【解決手段】ナビゲーション装置は、充電施設の位置情報、自車両の現在位置情報、及び自車両の電力残量に基づいて、自車両が充電施設まで走行可能であるか否かを判定する判定手段と、判定手段により自車両が充電施設まで走行可能でないと判定された場合に、自車両の電力残量、自車両の現在位置情報、及び自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、自車両がエアコンの使用を継続した場合に該エアコンが使用不可能となる時点と救助車両が到着する時点との差が最小となる場所を、救助車両を待つための推奨待機場所として自車両の乗員に報知する報知手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地点案内装置及び地点案内方法に関する。
【背景技術】
【0002】
従来、ナビゲーションシステムには、特許文献1に示すように、通常の自動車の燃料または電気自動車のバッテリ等のエネルギ残量を考慮して、自車両が経路上の2つ先のエネルギ補充施設まで走行できない場合に、経路上の1つ先のエネルギ補充施設でのエネルギ補充を案内するものが知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−46571号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1のナビゲーションシステムでは、自車両がエネルギ不足に陥って走行不能となることを回避させるべく、運転者にエネルギ補充を案内することまではできるものの、そうした案内のメッセージを運転者が無視したり又は見落としたりした場合の対処までは考慮されていない。
【0005】
すなわち、自車両がエネルギ不足に陥ってエネルギ補充施設まで走行不能となった場合には、救助車両を呼ぶことになるが、救助車両が自車両に到着するまでの間、走行不能となった場所で待っていなければならない。特に、炎天下の環境などで待つ場合、エネルギ不足の自車両では、エアコンなどの補機を使用することもできず、救助車両を待つ間は非常に不快な思いをしなければならないという問題がある。
【0006】
本発明は、このような従来技術に存在する問題点に着目してなされたものである。その目的とするところは、補機を有した自車両がエネルギ補充施設まで走行不可能となるまでエネルギ残量が減少した場合に、救助車両を待つ間の快適性が低下することを抑制することが可能な地点を案内する地点案内装置及び地点案内方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明に係る地点案内装置は、エネルギ補充施設の位置情報、自車両の現在位置情報、及び前記自車両のエネルギ情報に基づいて、前記自車両が前記エネルギ補充施設まで走行可能であるか否かを判定する判定手段と、前記判定手段により前記自車両が前記エネルギ補充施設まで走行可能でないと判定された場合に、前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が補機の使用を継続した場合に前記補機が使用不可能となる時点と前記救助車両が到着する時点との差が最小となる場所を、前記救助車両を待つための推奨待機場所として前記自車両の乗員に報知する報知手段とを備えたことを要旨とする。
【0008】
上記構成によれば、エアコンなどの補機を有した自車両が判定手段によりエネルギ補充施設まで走行可能でないと判定された場合に、現時点で残っているエネルギによりエアコンなどの補機を使用しながら推奨待機場所で救助車両を待つことで、補機が使用不可能となる時点から救助車両が到着するまでの時間を最小限に抑えることができる。したがって、救助車両を待つ間の快適性が低下することを抑制することが可能となる。
【0009】
また、本発明に係る地点案内装置は、前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が前記補機の使用を継続しながら現在位置で待機した場合に前記補機が使用不可能となる時点と、前記救助車両が前記自車両の現在位置に到着する時点とを算出する第1算出手段と、前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が前記補機の使用を継続しながら走行した場合の走行限界地点を検索し、前記自車両が前記補機の使用を継続しながら走行して前記走行限界地点に到着する時点と、前記救助車両が前記走行限界地点に到着する時点とを算出する第2算出手段と、前記第1算出手段による算出結果に基づき、前記自車両が前記補機の使用を継続しながら現在位置で待機した場合に前記補機が使用不可能となる時点と前記救助車両が前記自車両の現在位置に到着する時点との差を算出するとともに、前記第2算出手段による算出結果に基づき、前記自車両が前記補機の使用を継続しながら走行して前記走行限界地点に到着する時点と前記救助車両が前記走行限界地点に到着する時点との差を算出し、これらの算出した差が最小となる地点を前記自車両の現在位置及び前記走行限界地点のうちから選択する選択手段とを備え、前記報知手段は、前記選択手段によって選択した前記地点を、前記推奨待機場所として前記自車両の乗員に報知することを要旨とする。
【0010】
上記構成によれば、現在位置及び走行限界地点のうちから、補機が使用不可能となる時点から救助車両が到着するまでの時間を最小限に抑えることができる地点を選択することが可能であるため、自車両の乗員は当該選択された推奨待機場所で救助車両を待つことで、救助車両を待つ間の快適性が低下することを抑制することが可能となる。
【0011】
また、本発明に係る地点案内装置において、前記報知手段は、前記第1算出手段による算出結果において前記自車両が前記補機を使用しながら現在位置で待機した場合に前記補機が使用不可能となる時点よりも前記救助車両が前記自車両の現在位置に到着する時点の方が早い場合に、前記自車両の現在位置を前記推奨待機場所として前記自車両の乗員に報知することを要旨とする。
【0012】
上記構成によれば、無駄な移動をすることなく、自車両の現在位置で救助車両を快適に待つことが可能となる。
さらに、上記目的を達成するために、本発明に係る地点案内方法は、エネルギ補充施設の位置情報、自車両の現在位置情報、及び前記自車両のエネルギ情報に基づいて、前記自車両が前記エネルギ補充施設まで走行可能であるか否かを判定する判定ステップと、前記判定ステップで前記自車両が前記エネルギ補充施設まで走行可能でないと判定された場合に、前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が補機の使用を継続した場合に前記補機が使用不可能となる時点と前記救助車両が到着する時点との差が最小となる場所を、前記救助車両を待つための推奨待機場所として前記自車両の乗員に報知する報知ステップとを備えたことを要旨とする。
【0013】
上記構成によれば、上記地点案内装置と同様の作用効果を得ることが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る地点案内装置を備えたシステムを示すブロック図。
【図2】地点案内処理ルーチンを示すフローチャート。
【図3】救助処理ルーチンを示すフローチャート。
【図4】救助処理ルーチンを示すフローチャート。
【図5】自車両の現在位置と各走行限界地点との位置関係を示す模式図。
【発明を実施するための形態】
【0015】
以下、本発明を具体化した一実施形態について、図1〜図4に従って説明する。
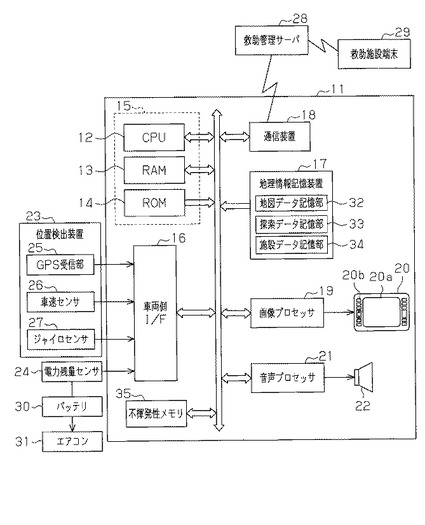
図1に示すように、電気自動車である自車両に搭載された地点案内装置としてのナビゲーション装置11は、制御装置15、車両側インターフェース(I/F)16、地理情報記憶装置17、通信装置18、画像プロセッサ19、ディスプレイ20、音声プロセッサ21、スピーカ22、及び不揮発性メモリ35を備えている。
【0016】
ディスプレイ20は、自車両の乗員(ユーザ)に各種情報を視認可能な状態で提供する表示画面20aと、複数種類の操作ボタン20bとを備えている。そして、ディスプレイ20は、乗員による操作ボタン20bの操作を受付けた場合、その操作内容に応じた信号を制御装置15に送信する。そして、ディスプレイ20は、送信した信号の返答として制御装置15から送信された画像データに基づく画像を表示画面20aに表示させる。スピーカ22は、ディスプレイ20の表示画面20aに表示された画像に基づく案内や説明などを音声で出力する。
【0017】
制御装置15には、車両側I/F16を介して位置検出装置23及び電力残量センサ24が電気的に接続されるとともに、バスを介して通信装置18、地理情報記憶装置17、画像プロセッサ19、音声プロセッサ21、及び不揮発性メモリ35が電気的に接続されている。位置検出装置23は、GPS(Global Positioning System)受信部25、車速センサ26及びジャイロセンサ27を有している。
【0018】
制御装置15は、GPS受信部25によって受信された受信信号に基づき、電波航法によって緯度や経度などの絶対位置を検出する。また、制御装置15は、車速センサ26及びジャイロセンサ27からの検出信号に基づき、自律航法を用いて基準位置からの相対位置を算出する。そして、制御装置15は、位置検出装置23から出力される絶対位置及び相対位置を組み合わせて自車両の現在位置を特定する。
【0019】
電力残量センサ24は、自車両の駆動源であるバッテリ30と電気的に接続されている。そして、電力残量センサ24は、バッテリ30の電力残量(エネルギ残量)を検出するとともに、その検出信号を制御装置15に出力する。また、バッテリ30は、自車両に搭載された補機の一例としてのエアコン(エアーコンディショナー)31にも電力を供給する。なお、補機とは、車内で乗員が快適に過ごすための電化製品全般(例えば、テレビ、ラジオ、CDプレーヤ、マッサージ機、空気清浄機など)を示す。
【0020】
通信装置18は、車外に設置された救助管理サーバ28と情報の送受信が可能になっている。救助管理サーバ28は、各所の救助施設に設置された救助施設端末29とそれぞれ情報の送受信が可能になっている。救助施設は、車両の救助を行うための複数台の救助車両を保有している。
【0021】
救助管理サーバ28には、各救助施設の位置情報(自車両の救助に向かうことが可能な救助車両の出発位置情報)、プローブ情報やリンク毎の平均車速情報などの道路交通情報が記憶されている。そして、通信装置18は、救助管理サーバ28から受信した各種情報を制御装置15に出力する。
【0022】
制御装置15は、CPU12、RAM13及びROM14を備えている。ROM14には、乗員によって選択された施設属性に合致する地点候補(例えば、海水浴場やレストラン)を検索するためのプログラム、目的地までのルートの探索や案内をするためのプログラム、後述する地点案内プログラム(図2、図3及び図4に示すプログラム)などが記憶されている。RAM13には、CPU12の作業領域と、探索された経路情報、救助管理サーバ28から取得した各種情報及び電力残量センサ24から取得した自車両の電力残量情報(エネルギ情報)などを記憶する記憶領域とが形成される。
【0023】
地理情報記憶装置17は、ハードディスクや光ディスクなどの外部記憶媒体によって構成されている。こうした地理情報記憶装置17には、地図データ記憶部32、探索データ記憶部33及び施設データ記憶部34が形成されている。地図データ記憶部32は、道路地図、住宅地図及び建物形状地図などの地図データを記憶している。探索データ記憶部33は、道路の起伏(勾配)情報、所定の地点間の道路における交通規制情報、距離及び通行料金といった各種道路情報に関するデータを記憶している。
【0024】
施設データ記憶部34は、電気自動車の救助施設、電気自動車の充電施設(エネルギ補充施設)、区役所、病院、駅、レストラン、遊園地、駐車場などの各種施設及び該各種施設の名称、住所(位置)、電話番号及び施設属性などのデータを記憶している。また、利用料金(入場料など)が発生する施設に関しては、利用料金に関するデータも施設データ記憶部34に記憶されている。なお、施設属性とは、施設(地点候補)を特定するためのジャンルを含んだ概念である。
【0025】
不揮発性メモリ35には、現時点の電力残量にて、自車両がエアコン31の使用を継続して走行することが可能な距離(以下、「走行可能距離」という)を算出するための第1演算式、及び、現時点の電力残量にて、自車両が停車状態である場合にエアコン31の使用を継続することが可能な時間(以下、「使用継続時間」という)を算出するための第2演算式などが記憶されている。
【0026】
そして、第1演算式は、現時点のバッテリ30の電力残量、単位時間あたり(単位距離あたり)のエアコン31の消費電力、リンク(道路)毎の走行に必要な電力量などのパラメータに基づいて走行可能距離を算出する式である。したがって、例えば、現時点のバッテリ30の電力残量が多いほど走行可能距離が長くなる一方、エアコン31の消費電力が大きいほど走行可能距離が短くなる。
【0027】
また、第2演算式は、現時点のバッテリ30の電力残量、単位時間あたりのエアコン31の消費電力などのパラメータに基づいて使用継続時間を算出する式である。したがって、例えば、現時点のバッテリ30の電力残量が多いほど使用継続時間が長くなる一方、エアコン31の消費電力が大きいほど使用継続時間が短くなる。
【0028】
画像プロセッサ19は、制御装置15からの制御信号に基づいて表示画面20aに表示するための各種の画像データを生成し、該生成した画像データをディスプレイ20に出力する。その結果、ディスプレイ20の表示画面20aには、入力された画像データに基づく画像が表示される。例えば、自車両の現在位置から目的地までのルートが制御装置15で探索された場合、画像プロセッサ19は、探索されたルート及び該ルートに沿った案内の開始の許可を求める画面などを表示させるための画像データを生成し、該画像データに基づく画像を表示画面20aに表示させる。また、目的とする地点候補が制御装置15によって検索された場合、画像プロセッサ19は、検索された地点候補を案内するための画像データを生成し、該画像データに基づく画像を表示画面20aに表示させる。
【0029】
音声プロセッサ21は、制御装置15からの制御信号に基づいてスピーカ22から出力するための各種の音声データを生成し、該生成した音声データをスピーカ22に出力する。その結果、スピーカ22からは、入力された音声データに基づく音声が出力される。例えば、自車両の現在位置から目的地までのルートが制御装置15で探索された場合、音声プロセッサ21は、探索されたルートや目的地に関する説明などを出力させるための音声データを生成し、該音声データに基づく音声をスピーカ22に出力させる。
【0030】
次に、本実施形態の制御装置15が地点案内プログラムに基づき実行する地点案内処理ルーチンについて、図2、図3及び図4に示すフローチャート、図5に示す模式図を参照して説明する。
【0031】
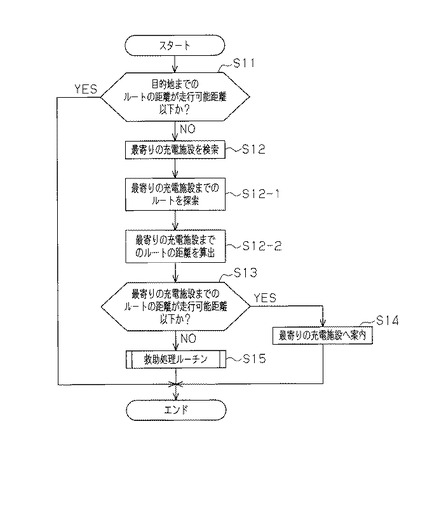
さて、地点案内処理ルーチンは、乗員による操作ボタン20bの操作によって目的地が制御装置15に入力されたことを契機に実行される。そして、この地点案内処理ルーチンにおいて、制御装置15は、まず、自車両の現在位置から目的地までのルートの距離が、第1演算式に基づいて算出した走行可能距離以下であるか否かを判定する(ステップS11)。
【0032】
ステップS11の判定結果が肯定判定(YES)である場合、制御装置15は、地点案内処理ルーチンを終了する。一方、ステップS11の判定結果が否定判定(NO)である場合、制御装置15は、最寄りの充電施設を検索する(ステップS12)。続いて、制御装置15は、自車両の現在位置からステップS12で検索した最寄りの充電施設までのルートを探索する(ステップS12−1)。
【0033】
続いて、制御装置15は、ステップS12−1で探索した自車両の現在位置から最寄りの充電施設までのルートの距離を、施設データ記憶部34に記憶された充電施設の位置情報と、位置検出装置23から出力される絶対位置及び相対位置に基づいて特定した自車両の現在位置情報とに基づいて算出する(ステップS12−2)。
【0034】
続いて、制御装置15は、ステップS12−2で算出した自車両の現在位置から最寄りの充電施設までのルートの距離が、第1演算式に基づいて算出した走行可能距離以下であるか否かを判定する(ステップS13)。したがって、本実施形態では、制御装置15が、充電施設まで走行可能であるか否かを判定する判定手段として機能する。また、ステップS12−2及びステップS13が判定ステップに相当する。
【0035】
ステップS13の判定結果が肯定判定(YES)である場合、制御装置15及び画像プロセッサ19はディスプレイ20の表示画面20aにステップS12−1で探索した最寄りの充電施設までのルートを表示するとともに、制御装置15及び音声プロセッサ21はスピーカ22からその充電施設までのルートを音声で出力する(ステップS14)。その後、制御装置15は、地点案内処理ルーチンを終了する。
【0036】
一方、ステップS13の判定結果が否定判定(NO)である場合、制御装置15は、救助処理ルーチンを実行し(ステップS15)、その後、地点案内処理ルーチンを終了する。ここで、通常、制御装置15は、ステップS13の判定が否定判定(NO)とならないように充電施設への案内を乗員に対して行うようにしているが、乗員が充電施設への案内を無視したり見落としたりして充電施設へ向かわなかった場合に、ステップS13の判定が否定判定(NO)となる。
【0037】
次に、本実施形態の制御装置15が実行する救助処理ルーチンについて説明する。
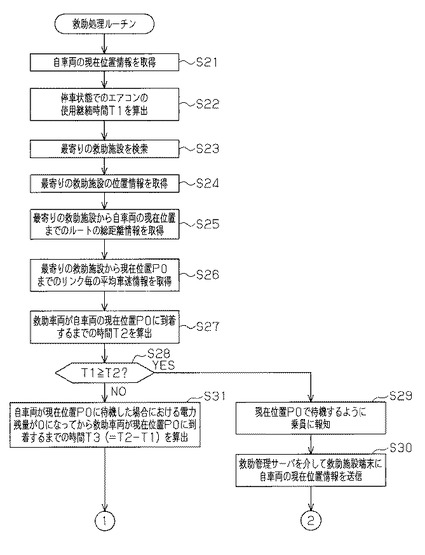
さて、救助処理ルーチンは、ステップS13の判定が制御装置15によって否定判定(NO)であると判定されたことを契機に実行される。すなわち、救助処理ルーチンは、制御装置15により自車両が最寄りの充電施設まで走行可能でないと判定されたことを契機に実行される。そして、この救助処理ルーチンにおいて、制御装置15は、まず、位置検出装置23から出力される絶対位置及び相対位置を組み合わせて自車両の現在位置情報を取得する(ステップS21)。
【0038】
続いて、制御装置15は、電力残量センサ24から取得した自車両の現時点でのバッテリ30の電力残量と不揮発性メモリ35に記憶された第2演算式とに基づき、現時点のバッテリ30の電力残量にて自車両が現在位置P0において停車状態で待機した場合に、エアコン31の使用を継続することが可能な使用継続時間T1を算出する(ステップS22)。すなわち、この使用継続時間T1は、エアコン31の使用を継続しながら自車両が現在位置P0において停車状態で待機した場合に、バッテリ30の電力残量が0になってエアコン31が使用不可能となる時点までの時間である。
【0039】
続いて、制御装置15は、最寄りの救助施設を検索し(ステップS23)、その後、ステップS23で検索した救助施設の位置情報(救助車両の出発位置情報)を施設データ記憶部34から取得する(ステップS24)。そして次に、制御装置15は、ステップS21で取得した自車両の現在位置情報及びステップS24で取得した救助施設の位置情報に基づき、最寄りの救助施設から自車両の現在位置P0までのルートを探索し、当該探索されたルートの総距離情報を探索データ記憶部33から取得する(ステップS25)。
【0040】
続いて、制御装置15は、ステップS24で取得した最寄りの救助施設からステップS21で取得した自車両の現在位置P0までのルートを構成するリンク毎の平均車速情報を、通信装置18を介して救助管理サーバ28から取得する(ステップS26)。続いて、制御装置15は、ステップS25で取得した最寄りの救助施設から自車両の現在位置P0までの総距離情報と、ステップS26で取得した最寄りの救助施設から自車両の現在位置P0までのリンク毎の平均車速情報とに基づいて、救助車両が最寄りの救助施設を出発して自車両の現在位置P0に到着する時点までの時間T2を算出する(ステップS27)。
【0041】
したがって、本実施形態では、制御装置15が、現在位置P0に待機した場合にエアコン(補機)31が使用不可能となる時点と救助車両が現在位置P0に到着する時点とを算出する第1算出手段としても機能する。
【0042】
続いて、制御装置15は、ステップS22で算出した現時点のバッテリ30の電力残量にて自車両が現在位置P0において停車状態で待機した場合に、エアコン31の使用を継続することが可能な使用継続時間T1がステップS27で算出した救助車両が最寄りの救助施設を出発して自車両の現在位置P0に到着するまでの時間T2以上であるか否かを判定する(ステップS28)。
【0043】
ステップS28の判定結果が肯定判定(YES)である場合、制御装置15及び画像プロセッサ19はディスプレイ20の表示画面20aに「現在位置で待機しましょう」という文字を表示するとともに、制御装置15及び音声プロセッサ21はスピーカ22から「現在位置で待機しましょう」という文言を音声で出力する(ステップS29)。すなわち、ディスプレイ20及びスピーカ22を通じて自車両の乗員に対して現在位置P0で待機するように報知される。さらに換言すれば、自車両の現在位置P0が推奨待機場所として自車両の乗員に対して報知される。
【0044】
続いて、制御装置15は、通信装置18及び救助管理サーバ28を介して救助施設端末29に自車両の現在位置情報を送信する(ステップS30)。これにより、救助施設から救助車両が自車両の救助に向かうようになる。このとき、自車両では、少なくとも該自車両が停車している現在位置P0に救助車両が到着するまではエアコン31を使用することができる。このため、自車両の乗員は、無駄な移動をすることなく、自車両の現在位置P0で救助車両を快適に待つことができる。その後、制御装置15は、救助処理ルーチンを終了する。
【0045】
一方、ステップS28の判定結果が否定判定(NO)である場合、制御装置15は、自車両が現在位置P0に待機した場合におけるバッテリ30の電力残量が0になってエアコン31が使用不可能となる時点から救助車両が現在位置P0に到着する時点までの時間T3を算出する(ステップS31)。すなわち、制御装置15は、ステップS27で算出した救助車両が自車両の現在位置P0に到着するまでの時間T2からステップS22で算出した自車両が現在位置P0において停車状態で待機した場合に、エアコン31の使用を継続することが可能な使用継続時間T1を減算することで、時間T3を算出する。さらに換言すれば、時間T2と使用継続時間T1との差が時間T3となる。
【0046】
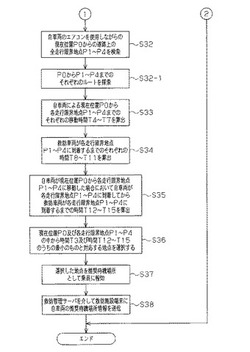
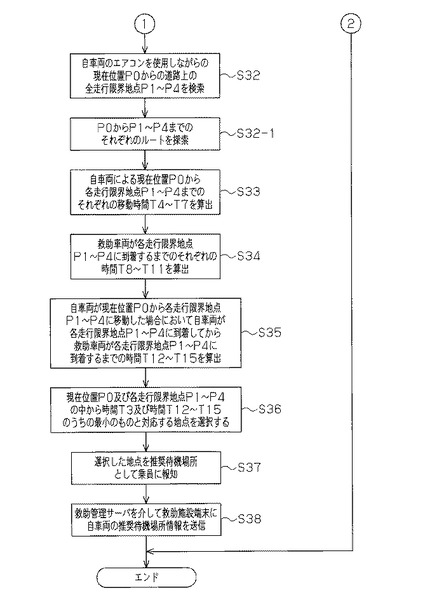
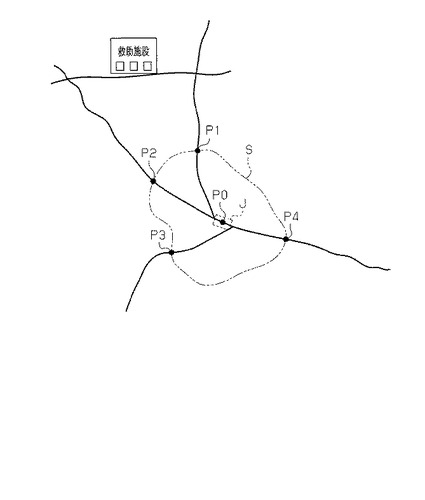
続いて、制御装置15は、不揮発性メモリ35に記憶された第1演算式、地図データ記憶部32に記憶された道路地図データ、及び探索データ記憶部33に記憶された道路の起伏(勾配)情報などに基づいて、自車両がエアコン31の使用を継続しながら走行した場合の現在位置P0から到達可能な道路上の限界地点である走行限界地点を全て検索する(ステップS32)。本実施形態では、図5に示すように、4つの走行限界地点P1〜P4が見つかったものとする。
【0047】
すなわち、ステップS32において、制御装置15は、図5に示すように、自車両Jの現在位置P0から、当該現在位置P0におけるバッテリ30の電力残量にて到達可能な領域である走行可能領域Sのうち、道路上の全走行限界地点P1〜P4を検索する。このとき、走行可能領域Sが現在位置P0を中心とした真円形状とならないのは、道路によって路面摩擦や勾配等が異なるため、各道路を走行するために必要な電力量(エネルギ量)や、下り坂で回収できる回生エネルギ量(自車両が下り坂を下るときの運動エネルギを回生ブレーキによって変換して得られる電力量)などに差が生じるからである。
【0048】
続いて、制御装置15は、現在位置P0からステップ32で検索した走行限界地点P1〜P4までのそれぞれのルートを探索する(ステップS32−1)。続いて、制御装置15は、ステップS32−1で探索した現在位置P0から各走行限界地点P1〜P4までのそれぞれのルートの距離及び救助管理サーバ28から通信装置18を介して取得した現在位置P0から各走行限界地点P1〜P4までのそれぞれのルートを構成するリンクの平均車速に基づいて、自車両Jによる現在位置P0から各走行限界地点P1〜P4までのそれぞれの移動時間T4〜T7を算出する(ステップS33)。すなわち、自車両Jがエアコン31の使用を継続しながら走行して各走行限界地点P1〜P4に到着する時点を算出する。
【0049】
続いて、制御装置15は、探索データ記憶部33に記憶された救助施設から各走行限界地点P1〜P4までのそれぞれのルートの距離及び救助管理サーバ28から通信装置18を介して取得した救助施設から各走行限界地点P1〜P4までのそれぞれのルートの平均車速に基づいて、救助車両による救助施設から各走行限界地点P1〜P4までのそれぞれの移動時間T8〜T11を算出する(ステップS34)。すなわち、救助車両が各走行限界地点P1〜P4に到着する時点をそれぞれ算出する。
【0050】
したがって、本実施形態では、制御装置15が、自車両がエアコン(補機)31を使用しながら走行して走行限界地点に到着する時点と救助車両がその走行限界地点に到着する時点とを算出する第2算出手段としても機能する。
【0051】
続いて、制御装置15は、自車両Jが現在位置P0から各走行限界地点P1〜P4に移動した場合における、自車両が各走行限界地点P1〜P4に到着してから救助車両が各走行限界地点P1〜P4に到着する時点までのそれぞれの時間T12〜T15を算出する(ステップS35)。すなわち、これらの時間T12〜T15は、制御装置15により、ステップS34で算出した移動時間T8〜T11からステップS33で算出した移動時間T4〜T7をそれぞれ減算することで算出される。さらに換言すれば、移動時間T8〜T11と移動時間T4〜T7とのそれぞれの差がそれぞれ時間T12〜T15となる。
【0052】
続いて、制御装置15は、現在位置P0及び各走行限界地点P1〜P4の中から、ステップS31で算出した時間T3及びステップS35でそれぞれ算出した時間T12〜T15のうちの最小のものと対応する地点(場所)を選択する(ステップS36)。すなわち、制御装置15は、時間T3及び時間T12〜T15を互いに比較した結果、最小となる時間と対応する地点を選択する。
【0053】
したがって、本実施形態では、制御装置15が、自車両が各走行限界地点P1〜P4に到着する時点(すなわち、エアコン(補機)31が使用不可能となる時点)と、救助車両が各走行限界地点P1〜P4に到着する時点との差が最小となる地点を自車両の現在位置P0及び各走行限界地点P1〜P4のうちから選択する選択手段としても機能する。
【0054】
続いて、制御装置15及び画像プロセッサ19は、ステップS36で選択した地点を、救助車両を待つための推奨待機場所として自車両Jの乗員に報知する(ステップS37)。このステップS37において制御装置15が選択した地点が自車両Jの現在位置P0であった場合には、制御装置15及び画像プロセッサ19はディスプレイ20の表示画面20aに「現在位置で待機しましょう」という文字を表示するとともに、制御装置15及び音声プロセッサ21はスピーカ22から「現在位置で待機しましょう」という文言を音声で出力する。
【0055】
一方、ステップS37において制御装置15が選択した地点が各走行限界地点P1〜P4のうちのいずれかであった場合には、制御装置15及び画像プロセッサ19はディスプレイ20の表示画面20aにステップS37で選択した走行限界地点までのルートを表示するとともに、制御装置15及び音声プロセッサ21はスピーカ22から該走行限界地点までの移動を促す文言及び該走行限界地点までのルートを音声で出力する。
【0056】
したがって、本実施形態では、制御装置15、画像プロセッサ19、ディスプレイ20、音声プロセッサ21、及びスピーカ22が推奨待機場所を自車両の乗員に報知する報知手段として機能する。また、ステップS36及びステップS37が報知ステップに相当する。
【0057】
続いて、制御装置15は、ステップS37で選択した地点を推奨待機場所情報として、通信装置18及び救助管理サーバ28を介して救助施設端末29に送信する(ステップS38)。これにより、救助施設から救助車両が自車両Jの救助に向かうようになる。このとき、自車両Jの乗員は、推奨待機場所で救助車両を待つことで、エアコン31が使用不可能となってから救助車両が到着するまでの待ち時間を最小限に抑えることができる。このため、救助車両を待つ間の自車両J内での快適性が低下することを抑制することができる。その後、制御装置15は、救助処理ルーチンを終了する。
【0058】
以上、詳述した実施形態によれば以下の効果を得ることができる。
(1)ナビゲーション装置11は、エアコン31を有した自車両Jが充電施設まで走行可能でないと判定した場合に、自車両Jの現在位置P0及び各走行限界地点P1〜P4のうちから、エアコン31が使用不可能となる時点から救助車両が到着するまでの時間が最小となる地点を選択し、その選択した地点を、救助車両を待つための推奨待機場所として自車両Jの乗員に報知する。このため、この報知された推奨待機場所で救助車両を待つことで、エアコン31が使用不可能となる時点から救助車両が到着するまでの時間を最小限に抑えることができる。したがって、自車両J内で救助車両を待つ間の快適性が低下することを抑制することができる。
【0059】
(2)ナビゲーション装置11は、自車両Jがエアコン31を使用しながら現在位置P0で待機した場合にエアコン31が使用不可能となる時点よりも救助車両が自車両Jの現在位置P0に到着する時点の方が早い場合には、自車両Jの現在位置P0を、救助車両を待つための推奨待機場所として自車両Jの乗員に報知する。このため、この報知された推奨待機場所である自車両Jの現在位置P0で救助車両を待つことで、無駄な移動をすることなく、エアコン31を使用して快適に救助車両を待つことができる。
(変更例)
なお、上記実施形態は、以下のような別の実施形態に変更してもよい。
【0060】
・ステップS13では、制御装置15が自車両の現在位置から充電施設まで走行可能であるか否かを、距離同士の比較によって判定していたが、電力量同士の比較によって判定するようにしてもよい。すなわち、ステップS12−2において、ステップS12−1で探索した自車両の現在位置から最寄りの充電施設までエアコン31の使用を継続して自車両が走行するのに必要な電力量を算出し、ステップS13において、自車両の現時点でのバッテリ30の電力残量が、ステップS12−2で算出した電力量以上であるか否かを判定するようにしてもよい。
【0061】
・ステップS32において、自車両の現在位置P0よりも救助施設側に位置する走行限界地点のみを検索するようにしてもよい。
・ステップS30及びステップS38において、ディスプレイ20の表示画面20aに救助施設の電話番号や電子メールアドレスを表示させるようにしてもよい。この場合、乗員が携帯電話(音声通話または電子メール)で救助施設に推奨待機場所を連絡する。
【0062】
・ステップS36において、時間T3及び時間T12〜T15のうちの最小となる時間が複数あった場合には、それらの最小となる時間に対応する各地点(複数の候補地点)の中から乗員に選択させる構成としてもよい。この構成によれば、乗員が推奨待機場所を自分の都合に合わせて自由に選ぶことができるようになる。
【0063】
・自車両に搭載可能であってエアコン31以外の快適性を得るための電化製品(例えば、テレビ、ラジオ、CDプレーヤ、マッサージ機、空気清浄機など)を補機として用いてもよい。
【0064】
・エアコン31とエアコン以外の補機とを併用して快適性を得るようにしてもよい。
・地点案内処理ルーチン(地点案内プログラム)は、救助管理サーバ28で実行するようにしてもよい。この場合、自車両に救助管理サーバ28と必要な各種情報の送受信が可能な端末装置(例えば、ナビゲーション装置)を搭載し、該端末装置を介して乗員に推奨待機場所を報知する。
【0065】
・本発明の地点案内装置を、携帯電話などの移動式情報端末に具体化してもよい。この場合、移動式情報端末に、上記各処理ルーチンを実行させるための地点案内プログラムをインストールさせ、上記各処理ルーチンを適宜実行させる。
【0066】
・本発明の地点案内装置を、パーソナルコンピュータなどの情報端末に具体化してもよい。この場合、情報端末に、地点案内プログラムをインストールさせ、上記各処理ルーチンを適宜実行させる。
【0067】
・自車両は、ガソリン車やディーゼル車などの内燃機関を駆動源とする自動車であってもよいし、内燃機関及び電気モータの2つの駆動源を備えたハイブリット車であってもよい。
【0068】
・各移動時間の算出においては、リンク毎の平均車速として、現在提供されている交通情報や、現在時刻に対応する統計交通情報などを利用する構成としてもよい。
次に、上記実施形態及び別の実施形態から把握できる技術的思想を以下に追記する。
【0069】
(イ)救助車両を待つための推奨待機場所を制御装置に案内させる地点案内プログラムにおいて、
前記制御装置に、
エネルギ補充施設の位置情報、自車両の現在位置情報、及び前記自車両のエネルギ情報に基づいて、前記自車両が前記エネルギ補充施設まで走行可能であるか否かを判定する判定ステップと、
前記判定ステップで前記自車両が前記エネルギ補充施設まで走行可能でないと判定された場合に、前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が前記補機の使用を継続した場合に前記補機が使用不可能となる時点と前記救助車両が到着する時点との差が最小となる場所を、前記救助車両を待つための推奨待機場所として前記自車両の乗員に報知する報知ステップと
を実行させることを特徴とする地点案内プログラム。
【0070】
上記構成によれば、上記地点案内装置と同様の作用効果を得ることが可能となる。
【符号の説明】
【0071】
11…地点案内装置としてのナビゲーション装置、15…判定手段、報知手段、第1算出手段、第2算出手段、及び選択手段を構成する制御装置、19…報知手段を構成する画像プロセッサ、20…報知手段を構成するディスプレイ、21…報知手段を構成する音声プロセッサ、22…報知手段を構成する及びスピーカ、J…自車両、P0…自車両の現在位置、P1〜P4…自車両の走行限界地点。
【技術分野】
【0001】
本発明は、地点案内装置及び地点案内方法に関する。
【背景技術】
【0002】
従来、ナビゲーションシステムには、特許文献1に示すように、通常の自動車の燃料または電気自動車のバッテリ等のエネルギ残量を考慮して、自車両が経路上の2つ先のエネルギ補充施設まで走行できない場合に、経路上の1つ先のエネルギ補充施設でのエネルギ補充を案内するものが知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−46571号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1のナビゲーションシステムでは、自車両がエネルギ不足に陥って走行不能となることを回避させるべく、運転者にエネルギ補充を案内することまではできるものの、そうした案内のメッセージを運転者が無視したり又は見落としたりした場合の対処までは考慮されていない。
【0005】
すなわち、自車両がエネルギ不足に陥ってエネルギ補充施設まで走行不能となった場合には、救助車両を呼ぶことになるが、救助車両が自車両に到着するまでの間、走行不能となった場所で待っていなければならない。特に、炎天下の環境などで待つ場合、エネルギ不足の自車両では、エアコンなどの補機を使用することもできず、救助車両を待つ間は非常に不快な思いをしなければならないという問題がある。
【0006】
本発明は、このような従来技術に存在する問題点に着目してなされたものである。その目的とするところは、補機を有した自車両がエネルギ補充施設まで走行不可能となるまでエネルギ残量が減少した場合に、救助車両を待つ間の快適性が低下することを抑制することが可能な地点を案内する地点案内装置及び地点案内方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明に係る地点案内装置は、エネルギ補充施設の位置情報、自車両の現在位置情報、及び前記自車両のエネルギ情報に基づいて、前記自車両が前記エネルギ補充施設まで走行可能であるか否かを判定する判定手段と、前記判定手段により前記自車両が前記エネルギ補充施設まで走行可能でないと判定された場合に、前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が補機の使用を継続した場合に前記補機が使用不可能となる時点と前記救助車両が到着する時点との差が最小となる場所を、前記救助車両を待つための推奨待機場所として前記自車両の乗員に報知する報知手段とを備えたことを要旨とする。
【0008】
上記構成によれば、エアコンなどの補機を有した自車両が判定手段によりエネルギ補充施設まで走行可能でないと判定された場合に、現時点で残っているエネルギによりエアコンなどの補機を使用しながら推奨待機場所で救助車両を待つことで、補機が使用不可能となる時点から救助車両が到着するまでの時間を最小限に抑えることができる。したがって、救助車両を待つ間の快適性が低下することを抑制することが可能となる。
【0009】
また、本発明に係る地点案内装置は、前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が前記補機の使用を継続しながら現在位置で待機した場合に前記補機が使用不可能となる時点と、前記救助車両が前記自車両の現在位置に到着する時点とを算出する第1算出手段と、前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が前記補機の使用を継続しながら走行した場合の走行限界地点を検索し、前記自車両が前記補機の使用を継続しながら走行して前記走行限界地点に到着する時点と、前記救助車両が前記走行限界地点に到着する時点とを算出する第2算出手段と、前記第1算出手段による算出結果に基づき、前記自車両が前記補機の使用を継続しながら現在位置で待機した場合に前記補機が使用不可能となる時点と前記救助車両が前記自車両の現在位置に到着する時点との差を算出するとともに、前記第2算出手段による算出結果に基づき、前記自車両が前記補機の使用を継続しながら走行して前記走行限界地点に到着する時点と前記救助車両が前記走行限界地点に到着する時点との差を算出し、これらの算出した差が最小となる地点を前記自車両の現在位置及び前記走行限界地点のうちから選択する選択手段とを備え、前記報知手段は、前記選択手段によって選択した前記地点を、前記推奨待機場所として前記自車両の乗員に報知することを要旨とする。
【0010】
上記構成によれば、現在位置及び走行限界地点のうちから、補機が使用不可能となる時点から救助車両が到着するまでの時間を最小限に抑えることができる地点を選択することが可能であるため、自車両の乗員は当該選択された推奨待機場所で救助車両を待つことで、救助車両を待つ間の快適性が低下することを抑制することが可能となる。
【0011】
また、本発明に係る地点案内装置において、前記報知手段は、前記第1算出手段による算出結果において前記自車両が前記補機を使用しながら現在位置で待機した場合に前記補機が使用不可能となる時点よりも前記救助車両が前記自車両の現在位置に到着する時点の方が早い場合に、前記自車両の現在位置を前記推奨待機場所として前記自車両の乗員に報知することを要旨とする。
【0012】
上記構成によれば、無駄な移動をすることなく、自車両の現在位置で救助車両を快適に待つことが可能となる。
さらに、上記目的を達成するために、本発明に係る地点案内方法は、エネルギ補充施設の位置情報、自車両の現在位置情報、及び前記自車両のエネルギ情報に基づいて、前記自車両が前記エネルギ補充施設まで走行可能であるか否かを判定する判定ステップと、前記判定ステップで前記自車両が前記エネルギ補充施設まで走行可能でないと判定された場合に、前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が補機の使用を継続した場合に前記補機が使用不可能となる時点と前記救助車両が到着する時点との差が最小となる場所を、前記救助車両を待つための推奨待機場所として前記自車両の乗員に報知する報知ステップとを備えたことを要旨とする。
【0013】
上記構成によれば、上記地点案内装置と同様の作用効果を得ることが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る地点案内装置を備えたシステムを示すブロック図。
【図2】地点案内処理ルーチンを示すフローチャート。
【図3】救助処理ルーチンを示すフローチャート。
【図4】救助処理ルーチンを示すフローチャート。
【図5】自車両の現在位置と各走行限界地点との位置関係を示す模式図。
【発明を実施するための形態】
【0015】
以下、本発明を具体化した一実施形態について、図1〜図4に従って説明する。
図1に示すように、電気自動車である自車両に搭載された地点案内装置としてのナビゲーション装置11は、制御装置15、車両側インターフェース(I/F)16、地理情報記憶装置17、通信装置18、画像プロセッサ19、ディスプレイ20、音声プロセッサ21、スピーカ22、及び不揮発性メモリ35を備えている。
【0016】
ディスプレイ20は、自車両の乗員(ユーザ)に各種情報を視認可能な状態で提供する表示画面20aと、複数種類の操作ボタン20bとを備えている。そして、ディスプレイ20は、乗員による操作ボタン20bの操作を受付けた場合、その操作内容に応じた信号を制御装置15に送信する。そして、ディスプレイ20は、送信した信号の返答として制御装置15から送信された画像データに基づく画像を表示画面20aに表示させる。スピーカ22は、ディスプレイ20の表示画面20aに表示された画像に基づく案内や説明などを音声で出力する。
【0017】
制御装置15には、車両側I/F16を介して位置検出装置23及び電力残量センサ24が電気的に接続されるとともに、バスを介して通信装置18、地理情報記憶装置17、画像プロセッサ19、音声プロセッサ21、及び不揮発性メモリ35が電気的に接続されている。位置検出装置23は、GPS(Global Positioning System)受信部25、車速センサ26及びジャイロセンサ27を有している。
【0018】
制御装置15は、GPS受信部25によって受信された受信信号に基づき、電波航法によって緯度や経度などの絶対位置を検出する。また、制御装置15は、車速センサ26及びジャイロセンサ27からの検出信号に基づき、自律航法を用いて基準位置からの相対位置を算出する。そして、制御装置15は、位置検出装置23から出力される絶対位置及び相対位置を組み合わせて自車両の現在位置を特定する。
【0019】
電力残量センサ24は、自車両の駆動源であるバッテリ30と電気的に接続されている。そして、電力残量センサ24は、バッテリ30の電力残量(エネルギ残量)を検出するとともに、その検出信号を制御装置15に出力する。また、バッテリ30は、自車両に搭載された補機の一例としてのエアコン(エアーコンディショナー)31にも電力を供給する。なお、補機とは、車内で乗員が快適に過ごすための電化製品全般(例えば、テレビ、ラジオ、CDプレーヤ、マッサージ機、空気清浄機など)を示す。
【0020】
通信装置18は、車外に設置された救助管理サーバ28と情報の送受信が可能になっている。救助管理サーバ28は、各所の救助施設に設置された救助施設端末29とそれぞれ情報の送受信が可能になっている。救助施設は、車両の救助を行うための複数台の救助車両を保有している。
【0021】
救助管理サーバ28には、各救助施設の位置情報(自車両の救助に向かうことが可能な救助車両の出発位置情報)、プローブ情報やリンク毎の平均車速情報などの道路交通情報が記憶されている。そして、通信装置18は、救助管理サーバ28から受信した各種情報を制御装置15に出力する。
【0022】
制御装置15は、CPU12、RAM13及びROM14を備えている。ROM14には、乗員によって選択された施設属性に合致する地点候補(例えば、海水浴場やレストラン)を検索するためのプログラム、目的地までのルートの探索や案内をするためのプログラム、後述する地点案内プログラム(図2、図3及び図4に示すプログラム)などが記憶されている。RAM13には、CPU12の作業領域と、探索された経路情報、救助管理サーバ28から取得した各種情報及び電力残量センサ24から取得した自車両の電力残量情報(エネルギ情報)などを記憶する記憶領域とが形成される。
【0023】
地理情報記憶装置17は、ハードディスクや光ディスクなどの外部記憶媒体によって構成されている。こうした地理情報記憶装置17には、地図データ記憶部32、探索データ記憶部33及び施設データ記憶部34が形成されている。地図データ記憶部32は、道路地図、住宅地図及び建物形状地図などの地図データを記憶している。探索データ記憶部33は、道路の起伏(勾配)情報、所定の地点間の道路における交通規制情報、距離及び通行料金といった各種道路情報に関するデータを記憶している。
【0024】
施設データ記憶部34は、電気自動車の救助施設、電気自動車の充電施設(エネルギ補充施設)、区役所、病院、駅、レストラン、遊園地、駐車場などの各種施設及び該各種施設の名称、住所(位置)、電話番号及び施設属性などのデータを記憶している。また、利用料金(入場料など)が発生する施設に関しては、利用料金に関するデータも施設データ記憶部34に記憶されている。なお、施設属性とは、施設(地点候補)を特定するためのジャンルを含んだ概念である。
【0025】
不揮発性メモリ35には、現時点の電力残量にて、自車両がエアコン31の使用を継続して走行することが可能な距離(以下、「走行可能距離」という)を算出するための第1演算式、及び、現時点の電力残量にて、自車両が停車状態である場合にエアコン31の使用を継続することが可能な時間(以下、「使用継続時間」という)を算出するための第2演算式などが記憶されている。
【0026】
そして、第1演算式は、現時点のバッテリ30の電力残量、単位時間あたり(単位距離あたり)のエアコン31の消費電力、リンク(道路)毎の走行に必要な電力量などのパラメータに基づいて走行可能距離を算出する式である。したがって、例えば、現時点のバッテリ30の電力残量が多いほど走行可能距離が長くなる一方、エアコン31の消費電力が大きいほど走行可能距離が短くなる。
【0027】
また、第2演算式は、現時点のバッテリ30の電力残量、単位時間あたりのエアコン31の消費電力などのパラメータに基づいて使用継続時間を算出する式である。したがって、例えば、現時点のバッテリ30の電力残量が多いほど使用継続時間が長くなる一方、エアコン31の消費電力が大きいほど使用継続時間が短くなる。
【0028】
画像プロセッサ19は、制御装置15からの制御信号に基づいて表示画面20aに表示するための各種の画像データを生成し、該生成した画像データをディスプレイ20に出力する。その結果、ディスプレイ20の表示画面20aには、入力された画像データに基づく画像が表示される。例えば、自車両の現在位置から目的地までのルートが制御装置15で探索された場合、画像プロセッサ19は、探索されたルート及び該ルートに沿った案内の開始の許可を求める画面などを表示させるための画像データを生成し、該画像データに基づく画像を表示画面20aに表示させる。また、目的とする地点候補が制御装置15によって検索された場合、画像プロセッサ19は、検索された地点候補を案内するための画像データを生成し、該画像データに基づく画像を表示画面20aに表示させる。
【0029】
音声プロセッサ21は、制御装置15からの制御信号に基づいてスピーカ22から出力するための各種の音声データを生成し、該生成した音声データをスピーカ22に出力する。その結果、スピーカ22からは、入力された音声データに基づく音声が出力される。例えば、自車両の現在位置から目的地までのルートが制御装置15で探索された場合、音声プロセッサ21は、探索されたルートや目的地に関する説明などを出力させるための音声データを生成し、該音声データに基づく音声をスピーカ22に出力させる。
【0030】
次に、本実施形態の制御装置15が地点案内プログラムに基づき実行する地点案内処理ルーチンについて、図2、図3及び図4に示すフローチャート、図5に示す模式図を参照して説明する。
【0031】
さて、地点案内処理ルーチンは、乗員による操作ボタン20bの操作によって目的地が制御装置15に入力されたことを契機に実行される。そして、この地点案内処理ルーチンにおいて、制御装置15は、まず、自車両の現在位置から目的地までのルートの距離が、第1演算式に基づいて算出した走行可能距離以下であるか否かを判定する(ステップS11)。
【0032】
ステップS11の判定結果が肯定判定(YES)である場合、制御装置15は、地点案内処理ルーチンを終了する。一方、ステップS11の判定結果が否定判定(NO)である場合、制御装置15は、最寄りの充電施設を検索する(ステップS12)。続いて、制御装置15は、自車両の現在位置からステップS12で検索した最寄りの充電施設までのルートを探索する(ステップS12−1)。
【0033】
続いて、制御装置15は、ステップS12−1で探索した自車両の現在位置から最寄りの充電施設までのルートの距離を、施設データ記憶部34に記憶された充電施設の位置情報と、位置検出装置23から出力される絶対位置及び相対位置に基づいて特定した自車両の現在位置情報とに基づいて算出する(ステップS12−2)。
【0034】
続いて、制御装置15は、ステップS12−2で算出した自車両の現在位置から最寄りの充電施設までのルートの距離が、第1演算式に基づいて算出した走行可能距離以下であるか否かを判定する(ステップS13)。したがって、本実施形態では、制御装置15が、充電施設まで走行可能であるか否かを判定する判定手段として機能する。また、ステップS12−2及びステップS13が判定ステップに相当する。
【0035】
ステップS13の判定結果が肯定判定(YES)である場合、制御装置15及び画像プロセッサ19はディスプレイ20の表示画面20aにステップS12−1で探索した最寄りの充電施設までのルートを表示するとともに、制御装置15及び音声プロセッサ21はスピーカ22からその充電施設までのルートを音声で出力する(ステップS14)。その後、制御装置15は、地点案内処理ルーチンを終了する。
【0036】
一方、ステップS13の判定結果が否定判定(NO)である場合、制御装置15は、救助処理ルーチンを実行し(ステップS15)、その後、地点案内処理ルーチンを終了する。ここで、通常、制御装置15は、ステップS13の判定が否定判定(NO)とならないように充電施設への案内を乗員に対して行うようにしているが、乗員が充電施設への案内を無視したり見落としたりして充電施設へ向かわなかった場合に、ステップS13の判定が否定判定(NO)となる。
【0037】
次に、本実施形態の制御装置15が実行する救助処理ルーチンについて説明する。
さて、救助処理ルーチンは、ステップS13の判定が制御装置15によって否定判定(NO)であると判定されたことを契機に実行される。すなわち、救助処理ルーチンは、制御装置15により自車両が最寄りの充電施設まで走行可能でないと判定されたことを契機に実行される。そして、この救助処理ルーチンにおいて、制御装置15は、まず、位置検出装置23から出力される絶対位置及び相対位置を組み合わせて自車両の現在位置情報を取得する(ステップS21)。
【0038】
続いて、制御装置15は、電力残量センサ24から取得した自車両の現時点でのバッテリ30の電力残量と不揮発性メモリ35に記憶された第2演算式とに基づき、現時点のバッテリ30の電力残量にて自車両が現在位置P0において停車状態で待機した場合に、エアコン31の使用を継続することが可能な使用継続時間T1を算出する(ステップS22)。すなわち、この使用継続時間T1は、エアコン31の使用を継続しながら自車両が現在位置P0において停車状態で待機した場合に、バッテリ30の電力残量が0になってエアコン31が使用不可能となる時点までの時間である。
【0039】
続いて、制御装置15は、最寄りの救助施設を検索し(ステップS23)、その後、ステップS23で検索した救助施設の位置情報(救助車両の出発位置情報)を施設データ記憶部34から取得する(ステップS24)。そして次に、制御装置15は、ステップS21で取得した自車両の現在位置情報及びステップS24で取得した救助施設の位置情報に基づき、最寄りの救助施設から自車両の現在位置P0までのルートを探索し、当該探索されたルートの総距離情報を探索データ記憶部33から取得する(ステップS25)。
【0040】
続いて、制御装置15は、ステップS24で取得した最寄りの救助施設からステップS21で取得した自車両の現在位置P0までのルートを構成するリンク毎の平均車速情報を、通信装置18を介して救助管理サーバ28から取得する(ステップS26)。続いて、制御装置15は、ステップS25で取得した最寄りの救助施設から自車両の現在位置P0までの総距離情報と、ステップS26で取得した最寄りの救助施設から自車両の現在位置P0までのリンク毎の平均車速情報とに基づいて、救助車両が最寄りの救助施設を出発して自車両の現在位置P0に到着する時点までの時間T2を算出する(ステップS27)。
【0041】
したがって、本実施形態では、制御装置15が、現在位置P0に待機した場合にエアコン(補機)31が使用不可能となる時点と救助車両が現在位置P0に到着する時点とを算出する第1算出手段としても機能する。
【0042】
続いて、制御装置15は、ステップS22で算出した現時点のバッテリ30の電力残量にて自車両が現在位置P0において停車状態で待機した場合に、エアコン31の使用を継続することが可能な使用継続時間T1がステップS27で算出した救助車両が最寄りの救助施設を出発して自車両の現在位置P0に到着するまでの時間T2以上であるか否かを判定する(ステップS28)。
【0043】
ステップS28の判定結果が肯定判定(YES)である場合、制御装置15及び画像プロセッサ19はディスプレイ20の表示画面20aに「現在位置で待機しましょう」という文字を表示するとともに、制御装置15及び音声プロセッサ21はスピーカ22から「現在位置で待機しましょう」という文言を音声で出力する(ステップS29)。すなわち、ディスプレイ20及びスピーカ22を通じて自車両の乗員に対して現在位置P0で待機するように報知される。さらに換言すれば、自車両の現在位置P0が推奨待機場所として自車両の乗員に対して報知される。
【0044】
続いて、制御装置15は、通信装置18及び救助管理サーバ28を介して救助施設端末29に自車両の現在位置情報を送信する(ステップS30)。これにより、救助施設から救助車両が自車両の救助に向かうようになる。このとき、自車両では、少なくとも該自車両が停車している現在位置P0に救助車両が到着するまではエアコン31を使用することができる。このため、自車両の乗員は、無駄な移動をすることなく、自車両の現在位置P0で救助車両を快適に待つことができる。その後、制御装置15は、救助処理ルーチンを終了する。
【0045】
一方、ステップS28の判定結果が否定判定(NO)である場合、制御装置15は、自車両が現在位置P0に待機した場合におけるバッテリ30の電力残量が0になってエアコン31が使用不可能となる時点から救助車両が現在位置P0に到着する時点までの時間T3を算出する(ステップS31)。すなわち、制御装置15は、ステップS27で算出した救助車両が自車両の現在位置P0に到着するまでの時間T2からステップS22で算出した自車両が現在位置P0において停車状態で待機した場合に、エアコン31の使用を継続することが可能な使用継続時間T1を減算することで、時間T3を算出する。さらに換言すれば、時間T2と使用継続時間T1との差が時間T3となる。
【0046】
続いて、制御装置15は、不揮発性メモリ35に記憶された第1演算式、地図データ記憶部32に記憶された道路地図データ、及び探索データ記憶部33に記憶された道路の起伏(勾配)情報などに基づいて、自車両がエアコン31の使用を継続しながら走行した場合の現在位置P0から到達可能な道路上の限界地点である走行限界地点を全て検索する(ステップS32)。本実施形態では、図5に示すように、4つの走行限界地点P1〜P4が見つかったものとする。
【0047】
すなわち、ステップS32において、制御装置15は、図5に示すように、自車両Jの現在位置P0から、当該現在位置P0におけるバッテリ30の電力残量にて到達可能な領域である走行可能領域Sのうち、道路上の全走行限界地点P1〜P4を検索する。このとき、走行可能領域Sが現在位置P0を中心とした真円形状とならないのは、道路によって路面摩擦や勾配等が異なるため、各道路を走行するために必要な電力量(エネルギ量)や、下り坂で回収できる回生エネルギ量(自車両が下り坂を下るときの運動エネルギを回生ブレーキによって変換して得られる電力量)などに差が生じるからである。
【0048】
続いて、制御装置15は、現在位置P0からステップ32で検索した走行限界地点P1〜P4までのそれぞれのルートを探索する(ステップS32−1)。続いて、制御装置15は、ステップS32−1で探索した現在位置P0から各走行限界地点P1〜P4までのそれぞれのルートの距離及び救助管理サーバ28から通信装置18を介して取得した現在位置P0から各走行限界地点P1〜P4までのそれぞれのルートを構成するリンクの平均車速に基づいて、自車両Jによる現在位置P0から各走行限界地点P1〜P4までのそれぞれの移動時間T4〜T7を算出する(ステップS33)。すなわち、自車両Jがエアコン31の使用を継続しながら走行して各走行限界地点P1〜P4に到着する時点を算出する。
【0049】
続いて、制御装置15は、探索データ記憶部33に記憶された救助施設から各走行限界地点P1〜P4までのそれぞれのルートの距離及び救助管理サーバ28から通信装置18を介して取得した救助施設から各走行限界地点P1〜P4までのそれぞれのルートの平均車速に基づいて、救助車両による救助施設から各走行限界地点P1〜P4までのそれぞれの移動時間T8〜T11を算出する(ステップS34)。すなわち、救助車両が各走行限界地点P1〜P4に到着する時点をそれぞれ算出する。
【0050】
したがって、本実施形態では、制御装置15が、自車両がエアコン(補機)31を使用しながら走行して走行限界地点に到着する時点と救助車両がその走行限界地点に到着する時点とを算出する第2算出手段としても機能する。
【0051】
続いて、制御装置15は、自車両Jが現在位置P0から各走行限界地点P1〜P4に移動した場合における、自車両が各走行限界地点P1〜P4に到着してから救助車両が各走行限界地点P1〜P4に到着する時点までのそれぞれの時間T12〜T15を算出する(ステップS35)。すなわち、これらの時間T12〜T15は、制御装置15により、ステップS34で算出した移動時間T8〜T11からステップS33で算出した移動時間T4〜T7をそれぞれ減算することで算出される。さらに換言すれば、移動時間T8〜T11と移動時間T4〜T7とのそれぞれの差がそれぞれ時間T12〜T15となる。
【0052】
続いて、制御装置15は、現在位置P0及び各走行限界地点P1〜P4の中から、ステップS31で算出した時間T3及びステップS35でそれぞれ算出した時間T12〜T15のうちの最小のものと対応する地点(場所)を選択する(ステップS36)。すなわち、制御装置15は、時間T3及び時間T12〜T15を互いに比較した結果、最小となる時間と対応する地点を選択する。
【0053】
したがって、本実施形態では、制御装置15が、自車両が各走行限界地点P1〜P4に到着する時点(すなわち、エアコン(補機)31が使用不可能となる時点)と、救助車両が各走行限界地点P1〜P4に到着する時点との差が最小となる地点を自車両の現在位置P0及び各走行限界地点P1〜P4のうちから選択する選択手段としても機能する。
【0054】
続いて、制御装置15及び画像プロセッサ19は、ステップS36で選択した地点を、救助車両を待つための推奨待機場所として自車両Jの乗員に報知する(ステップS37)。このステップS37において制御装置15が選択した地点が自車両Jの現在位置P0であった場合には、制御装置15及び画像プロセッサ19はディスプレイ20の表示画面20aに「現在位置で待機しましょう」という文字を表示するとともに、制御装置15及び音声プロセッサ21はスピーカ22から「現在位置で待機しましょう」という文言を音声で出力する。
【0055】
一方、ステップS37において制御装置15が選択した地点が各走行限界地点P1〜P4のうちのいずれかであった場合には、制御装置15及び画像プロセッサ19はディスプレイ20の表示画面20aにステップS37で選択した走行限界地点までのルートを表示するとともに、制御装置15及び音声プロセッサ21はスピーカ22から該走行限界地点までの移動を促す文言及び該走行限界地点までのルートを音声で出力する。
【0056】
したがって、本実施形態では、制御装置15、画像プロセッサ19、ディスプレイ20、音声プロセッサ21、及びスピーカ22が推奨待機場所を自車両の乗員に報知する報知手段として機能する。また、ステップS36及びステップS37が報知ステップに相当する。
【0057】
続いて、制御装置15は、ステップS37で選択した地点を推奨待機場所情報として、通信装置18及び救助管理サーバ28を介して救助施設端末29に送信する(ステップS38)。これにより、救助施設から救助車両が自車両Jの救助に向かうようになる。このとき、自車両Jの乗員は、推奨待機場所で救助車両を待つことで、エアコン31が使用不可能となってから救助車両が到着するまでの待ち時間を最小限に抑えることができる。このため、救助車両を待つ間の自車両J内での快適性が低下することを抑制することができる。その後、制御装置15は、救助処理ルーチンを終了する。
【0058】
以上、詳述した実施形態によれば以下の効果を得ることができる。
(1)ナビゲーション装置11は、エアコン31を有した自車両Jが充電施設まで走行可能でないと判定した場合に、自車両Jの現在位置P0及び各走行限界地点P1〜P4のうちから、エアコン31が使用不可能となる時点から救助車両が到着するまでの時間が最小となる地点を選択し、その選択した地点を、救助車両を待つための推奨待機場所として自車両Jの乗員に報知する。このため、この報知された推奨待機場所で救助車両を待つことで、エアコン31が使用不可能となる時点から救助車両が到着するまでの時間を最小限に抑えることができる。したがって、自車両J内で救助車両を待つ間の快適性が低下することを抑制することができる。
【0059】
(2)ナビゲーション装置11は、自車両Jがエアコン31を使用しながら現在位置P0で待機した場合にエアコン31が使用不可能となる時点よりも救助車両が自車両Jの現在位置P0に到着する時点の方が早い場合には、自車両Jの現在位置P0を、救助車両を待つための推奨待機場所として自車両Jの乗員に報知する。このため、この報知された推奨待機場所である自車両Jの現在位置P0で救助車両を待つことで、無駄な移動をすることなく、エアコン31を使用して快適に救助車両を待つことができる。
(変更例)
なお、上記実施形態は、以下のような別の実施形態に変更してもよい。
【0060】
・ステップS13では、制御装置15が自車両の現在位置から充電施設まで走行可能であるか否かを、距離同士の比較によって判定していたが、電力量同士の比較によって判定するようにしてもよい。すなわち、ステップS12−2において、ステップS12−1で探索した自車両の現在位置から最寄りの充電施設までエアコン31の使用を継続して自車両が走行するのに必要な電力量を算出し、ステップS13において、自車両の現時点でのバッテリ30の電力残量が、ステップS12−2で算出した電力量以上であるか否かを判定するようにしてもよい。
【0061】
・ステップS32において、自車両の現在位置P0よりも救助施設側に位置する走行限界地点のみを検索するようにしてもよい。
・ステップS30及びステップS38において、ディスプレイ20の表示画面20aに救助施設の電話番号や電子メールアドレスを表示させるようにしてもよい。この場合、乗員が携帯電話(音声通話または電子メール)で救助施設に推奨待機場所を連絡する。
【0062】
・ステップS36において、時間T3及び時間T12〜T15のうちの最小となる時間が複数あった場合には、それらの最小となる時間に対応する各地点(複数の候補地点)の中から乗員に選択させる構成としてもよい。この構成によれば、乗員が推奨待機場所を自分の都合に合わせて自由に選ぶことができるようになる。
【0063】
・自車両に搭載可能であってエアコン31以外の快適性を得るための電化製品(例えば、テレビ、ラジオ、CDプレーヤ、マッサージ機、空気清浄機など)を補機として用いてもよい。
【0064】
・エアコン31とエアコン以外の補機とを併用して快適性を得るようにしてもよい。
・地点案内処理ルーチン(地点案内プログラム)は、救助管理サーバ28で実行するようにしてもよい。この場合、自車両に救助管理サーバ28と必要な各種情報の送受信が可能な端末装置(例えば、ナビゲーション装置)を搭載し、該端末装置を介して乗員に推奨待機場所を報知する。
【0065】
・本発明の地点案内装置を、携帯電話などの移動式情報端末に具体化してもよい。この場合、移動式情報端末に、上記各処理ルーチンを実行させるための地点案内プログラムをインストールさせ、上記各処理ルーチンを適宜実行させる。
【0066】
・本発明の地点案内装置を、パーソナルコンピュータなどの情報端末に具体化してもよい。この場合、情報端末に、地点案内プログラムをインストールさせ、上記各処理ルーチンを適宜実行させる。
【0067】
・自車両は、ガソリン車やディーゼル車などの内燃機関を駆動源とする自動車であってもよいし、内燃機関及び電気モータの2つの駆動源を備えたハイブリット車であってもよい。
【0068】
・各移動時間の算出においては、リンク毎の平均車速として、現在提供されている交通情報や、現在時刻に対応する統計交通情報などを利用する構成としてもよい。
次に、上記実施形態及び別の実施形態から把握できる技術的思想を以下に追記する。
【0069】
(イ)救助車両を待つための推奨待機場所を制御装置に案内させる地点案内プログラムにおいて、
前記制御装置に、
エネルギ補充施設の位置情報、自車両の現在位置情報、及び前記自車両のエネルギ情報に基づいて、前記自車両が前記エネルギ補充施設まで走行可能であるか否かを判定する判定ステップと、
前記判定ステップで前記自車両が前記エネルギ補充施設まで走行可能でないと判定された場合に、前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が前記補機の使用を継続した場合に前記補機が使用不可能となる時点と前記救助車両が到着する時点との差が最小となる場所を、前記救助車両を待つための推奨待機場所として前記自車両の乗員に報知する報知ステップと
を実行させることを特徴とする地点案内プログラム。
【0070】
上記構成によれば、上記地点案内装置と同様の作用効果を得ることが可能となる。
【符号の説明】
【0071】
11…地点案内装置としてのナビゲーション装置、15…判定手段、報知手段、第1算出手段、第2算出手段、及び選択手段を構成する制御装置、19…報知手段を構成する画像プロセッサ、20…報知手段を構成するディスプレイ、21…報知手段を構成する音声プロセッサ、22…報知手段を構成する及びスピーカ、J…自車両、P0…自車両の現在位置、P1〜P4…自車両の走行限界地点。
【特許請求の範囲】
【請求項1】
エネルギ補充施設の位置情報、自車両の現在位置情報、及び前記自車両のエネルギ情報に基づいて、前記自車両が前記エネルギ補充施設まで走行可能であるか否かを判定する判定手段と、
前記判定手段により前記自車両が前記エネルギ補充施設まで走行可能でないと判定された場合に、前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が補機の使用を継続した場合に前記補機が使用不可能となる時点と前記救助車両が到着する時点との差が最小となる場所を、前記救助車両を待つための推奨待機場所として前記自車両の乗員に報知する報知手段と
を備えたことを特徴とする地点案内装置。
【請求項2】
前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が前記補機の使用を継続しながら現在位置で待機した場合に前記補機が使用不可能となる時点と、前記救助車両が前記自車両の現在位置に到着する時点とを算出する第1算出手段と、
前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が前記補機の使用を継続しながら走行した場合の走行限界地点を検索し、前記自車両が前記補機の使用を継続しながら走行して前記走行限界地点に到着する時点と、前記救助車両が前記走行限界地点に到着する時点とを算出する第2算出手段と、
前記第1算出手段による算出結果に基づき、前記自車両が前記補機の使用を継続しながら現在位置で待機した場合に前記補機が使用不可能となる時点と前記救助車両が前記自車両の現在位置に到着する時点との差を算出するとともに、前記第2算出手段による算出結果に基づき、前記自車両が前記補機の使用を継続しながら走行して前記走行限界地点に到着する時点と前記救助車両が前記走行限界地点に到着する時点との差を算出し、これらの算出した差が最小となる地点を前記自車両の現在位置及び前記走行限界地点のうちから選択する選択手段と
を備え、
前記報知手段は、前記選択手段によって選択した前記地点を、前記推奨待機場所として前記自車両の乗員に報知することを特徴とする請求項1に記載の地点案内装置。
【請求項3】
前記報知手段は、前記第1算出手段による算出結果において前記自車両が前記補機の使用を継続しながら現在位置で待機した場合に前記補機が使用不可能となる時点よりも前記救助車両が前記自車両の現在位置に到着する時点の方が早い場合に、前記自車両の現在位置を前記推奨待機場所として前記自車両の乗員に報知することを特徴とする請求項2に記載の地点案内装置。
【請求項4】
エネルギ補充施設の位置情報、自車両の現在位置情報、及び前記自車両のエネルギ情報に基づいて、前記自車両が前記エネルギ補充施設まで走行可能であるか否かを判定する判定ステップと、
前記判定ステップで前記自車両が前記エネルギ補充施設まで走行可能でないと判定された場合に、前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が補機の使用を継続した場合に前記補機が使用不可能となる時点と前記救助車両が到着する時点との差が最小となる場所を、前記救助車両を待つための推奨待機場所として前記自車両の乗員に報知する報知ステップと
を備えたことを特徴とする地点案内方法。
【請求項1】
エネルギ補充施設の位置情報、自車両の現在位置情報、及び前記自車両のエネルギ情報に基づいて、前記自車両が前記エネルギ補充施設まで走行可能であるか否かを判定する判定手段と、
前記判定手段により前記自車両が前記エネルギ補充施設まで走行可能でないと判定された場合に、前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が補機の使用を継続した場合に前記補機が使用不可能となる時点と前記救助車両が到着する時点との差が最小となる場所を、前記救助車両を待つための推奨待機場所として前記自車両の乗員に報知する報知手段と
を備えたことを特徴とする地点案内装置。
【請求項2】
前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が前記補機の使用を継続しながら現在位置で待機した場合に前記補機が使用不可能となる時点と、前記救助車両が前記自車両の現在位置に到着する時点とを算出する第1算出手段と、
前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が前記補機の使用を継続しながら走行した場合の走行限界地点を検索し、前記自車両が前記補機の使用を継続しながら走行して前記走行限界地点に到着する時点と、前記救助車両が前記走行限界地点に到着する時点とを算出する第2算出手段と、
前記第1算出手段による算出結果に基づき、前記自車両が前記補機の使用を継続しながら現在位置で待機した場合に前記補機が使用不可能となる時点と前記救助車両が前記自車両の現在位置に到着する時点との差を算出するとともに、前記第2算出手段による算出結果に基づき、前記自車両が前記補機の使用を継続しながら走行して前記走行限界地点に到着する時点と前記救助車両が前記走行限界地点に到着する時点との差を算出し、これらの算出した差が最小となる地点を前記自車両の現在位置及び前記走行限界地点のうちから選択する選択手段と
を備え、
前記報知手段は、前記選択手段によって選択した前記地点を、前記推奨待機場所として前記自車両の乗員に報知することを特徴とする請求項1に記載の地点案内装置。
【請求項3】
前記報知手段は、前記第1算出手段による算出結果において前記自車両が前記補機の使用を継続しながら現在位置で待機した場合に前記補機が使用不可能となる時点よりも前記救助車両が前記自車両の現在位置に到着する時点の方が早い場合に、前記自車両の現在位置を前記推奨待機場所として前記自車両の乗員に報知することを特徴とする請求項2に記載の地点案内装置。
【請求項4】
エネルギ補充施設の位置情報、自車両の現在位置情報、及び前記自車両のエネルギ情報に基づいて、前記自車両が前記エネルギ補充施設まで走行可能であるか否かを判定する判定ステップと、
前記判定ステップで前記自車両が前記エネルギ補充施設まで走行可能でないと判定された場合に、前記自車両のエネルギ情報、前記自車両の現在位置情報、及び前記自車両の救助に向かうことが可能な救助車両の出発位置情報に基づき、前記自車両が補機の使用を継続した場合に前記補機が使用不可能となる時点と前記救助車両が到着する時点との差が最小となる場所を、前記救助車両を待つための推奨待機場所として前記自車両の乗員に報知する報知ステップと
を備えたことを特徴とする地点案内方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−150045(P2012−150045A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2011−9801(P2011−9801)
【出願日】平成23年1月20日(2011.1.20)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願日】平成23年1月20日(2011.1.20)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]