
地理的位置の現在の測定値を地図対象物に割り当てるための装置および方法
地理的位置の現在の測定値12−nを、地理的地図の地図対象物14に割り当てるための装置20。処理装置22は、現在の測定値12−nが、第1の地図対象物14−1に割り当てられるかどうかを指示する、第1の確率測度P1を決定し、かつ、仮に、第1の確率測度P1が、第1の地図対象物14−1への現在の測定値12−nの割り当てがありそうもないことを示すならば、現在の測定値12−nが、第2の地図対象物14−2に割り当てられるかどうかを指示する、第2の確率測度P2を決定する。現在の測定値12−nは、隣接地理的位置の一連の隣接測定値から発生する。一連の隣接測定値のうち、少なくとも1つの隣接測定値は、事前に既に、第1の地図対象物14−1に割り当てられている。第2の地図対象物14−2は、第1の地図対象物14−1との交差点を有している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、地理的位置の現在の測定値の精度を改良するために用いることができる、地理的位置の現在の測定値を、地理的地図または地図対象物に割り当てるための装置および方法に関する。
【背景技術】
【0002】
道路または経路を運転または歩行しながら、一定の間隔ごとに、それぞれの地理的位置の測定値を決定するとき、使用される方法によって、多かれ少なかれ、重大な誤りが生じる。現在、最も広範囲のナビゲーションシステムは、全地球側位システム(GPS)である。人工信号歪みが、数年前に除去されて以来、ほとんど努力しないで、10m〜15mの位置精度を得ることができる。その結果、位置精度は、測定時に「見られる」衛星の数に依存する。一般的に、測定精度は受信衛星の数によって増加する、と言うことができる。
【0003】
しかしながら、仮に、車や人が、一部高層建築された都市部の中の道路または路地を移動しているならば、ビルが衛星の照準線を隠すことが起きる。したがって、GPSによって達成可能な測定精度は減少する。仮に、衛星位置決定システムによって測定された地理的未加工データが、地理的な町内地図または地図に置かれるならば、比較的信じがたい位置の指示が生じる。その位置の指示は、通常、少ししかナビゲーション装置の実際の地理的位置を有さない。これは、特に、10m〜15mの精度さえ信じがたい結果をもたらす路地や小道に適用される。特に、交差点では、不正確に測定された点が、どの道路に割り当てられるかを決定することは、困難である。
【0004】
その結果、ナビゲーションシステムによって測定された地理的未加工データは、頻繁に、地図データと照合される。その結果、例えば、運転手は、彼の乗り物のナビゲーション装置の表示画面のもっともらしい位置情報を受信する。仮に、例えば、位置決定の精度が現在、約50mであって、運転手が湖の傍の道路に沿って移動する場合、ナビゲーション装置の表示画面上の乗り物の位置が、道路上ではなく、湖の中に指示されることは、非常に紛らわしい。未加工の測定値が、湖の中の(間違っている)位置を提供しても、非常に紛らわしい。この場合、ナビゲーションシステムは、そのような位置が道路ナビゲーションシステムにおける適用には非常に適さないということを検出し、地理的地図の表示画面のために、測定された地理的位置を、例えば、道路上のもっともらしい位置に対応するように修正する。
【0005】
例えば、WLAN(ワイヤレス・ローカル・エリア・ネットワーク)規格に基づいた無線放送網の増加する分布のために、これらの無線放送網は、新しい位置決め方法の基礎として自薦する。WLAN規格を基礎とする位置決めシステムでは、いわゆる受信信号強度(RSS)指紋が、基本的方法として、頻繁に使用される。この方法は、いくつかの放送局の無線信号の信号強度が、明白に特徴のある現在の位置または現在の地理的位置を、現在の位置で受信する、または、受信できるという仮定に基づいている。仮に、多数の地理的基準位置(または基準位置)を含む基準データベースが存在し、放送局の送信機識別を、対応する無線信号の信号強度と同様に、現在の位置で基準時間に受信する、または、受信できるならば、現在の位置は、現在の測定値とデータベースの基準値とを照合することによって、現在の測定値の一組(送信機識別と関連信号強度値)から推論できる。この照合は、全ての基準点に対して、それ事前に記録された測定値または基準値が、現在の位置の現在の測定値に、どの位、類似しているかを評価する。最も類似の基準点が、携帯端末装置の現在の位置の仮定値の基礎として使用される。
【0006】
このことから、そのようなWLAN規格の位置決めシステムの精度が、基準データベースの基準位置の品質に、特に、依存することは、明白である。基準測定時に基準位置で受信できる無線送信機の信号強度は、基準データベースごとに、基準測定によって実験的に決定される。これは、基準測定が実行された全ての基準位置の、それぞれの関連受信電磁界強度と品質とを含んでいる無線送信機(アクセス点)のリストを含むデータベースを生じる。その結果、例えば、基準位置は、GPS装置によって決定される。そのような測定値の精度は、上で既に議論した。
また、先行技術としては、特許文献1および特許文献2に記載の技術が知られている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】米国出願公開公報:US 6023653 A
【特許文献2】ヨーロッパ出願公開公報:EP 1022578 A2
【発明の概要】
【発明が解決しようとする課題】
【0008】
それゆえに、本発明の主たる目的は、位置測定値を地理的地図に照合させることによって、位置測定値の精度を向上させることができる、地理的位置の現在の測定値を地図対象物に割り当てるための装置および方法を提供することである。
【課題を解決するための手段】
【0009】
この目的は、独立請求項の特徴を有する装置および方法によって解決される。
【0010】
例えば、第1の道路から第2の道路への変更が行われるとき、測定位置の値を、(デジタル)地図データ、または、道路や経路などの地図対象物に照合するため、確率測度が、不正確な未加工測定値から検出できるように導入される、ということが、本発明の発見である。道路は地図対象物を表す。明らかに、正確な地理的座標は、地図対象物ごとに存在する。仮に、地理的位置の未加工測定値が、本発明の概念に従って、地図対象物に割り当てられるならば、これは、一般に、地理的位置の未加工測定値の価値向上を意味し、精度が改良されるという効果をもたらす。したがって、その後、WLAN規格に基づいた位置決めに対して、改良された位置測定値は、基準測定パケットの基準位置として非常に貴重である。
【0011】
少なくとも2つの最後の測定点にて、現在考えられている測定点の変更は、例えば、確率測度の決定に入れられる。より正確には、例えば、(最良適合)線からの、現在考えられている測定点の逸脱が、考えられる。(最良適合)線は、既に地図対象物に割り当てられた少なくとも2つの最後の測定点を通る。その結果、少なくとも2つの最後に割り当てられた測定点は、道路、経路またはビルなどの地図対象物に割り当てられた測定点を表す。
【0012】
さらに、現在考えられている位置測定値から、考えられている地図対象物(道路など)までの距離も、確率測度の決定に入れられる。
【0013】
現在考えられている測定値が、第1の地図対象物(例えば、道路)、または、第2の地図対象物(例えば、交差点)のいずれに割り当てられるべきかが、質問できるとき、現在の測定値から、第2の地図対象物(交差点)を有する第1の地図対象物(道路)の次の可能な交差点までの距離が、確率測度の決定に入れられる。
【0014】
このために、本発明は、地理的位置の現在の測定値を、地理的地図の地図対象物に割り当てるための装置を供給する。現在の測定値は、隣接する地理的位置の一連の隣接測定値から発生する。本発明に係る装置は、第1の確率測度を決定するための処理装置を含む。第1の確率測度は、現在の測定値が、第1の地図対象物に割り当てられることができるかどうかを指示する。前記一連の隣接測定値のうち、少なくとも1つの隣接測定値は、事前に既に、第1の地図対象物に割り当てられている。そして、決定の際に、仮に、第1の確率測度が、現在の測定値を第1の地図対象物に割り当てることは、ありそうもないことを指示するならば、第2の確率測度は、現在の測定値が、第1の地図対象物との交差点を有する第2の地図対象物に割り当てられることができるかどうか、を指示する。
【0015】
その結果、測定点は、様々な地図対象物に割り当てられる。例えば、屋外の道路、広場、路地、および、屋内の廊下、部屋、床、壁などは、区域的に定義された線から成る多角形として、モデル化される。これは、全ての地図対象物が、少なくとも区域的に線で形取られた地図対象物を再び含むこと、を意味する。
【0016】
さらに、本発明は、地理的基準位置と、地理的基準位置に割り当てた基準測定パケットと、の測定座標を有する基準データを改良するための装置を提供する。基準測定パケットは、地理的基準位置で決定された基準送信機識別と、基準時に基準位置で受信できる無線送信機の電磁界信号特性と、を有する。この装置は、地理的基準位置の実際の座標に近似している測定座標を、地理的地図の地図対象物の座標に照合させるための処理装置を含む。この処理装置は、測定座標より地理的基準位置の実際の座標に一層良く対応する改良座標を得て、改良座標を基準測定パケットに割り当てる。
【0017】
したがって、本発明は、例えばGPSシステムで測定された地理的な未加工測定値を、デジタル地図の地図対象物に割り当てることを許す。地図対象物は、再び、正確な位置情報が提供される。したがって、不正確な未加工の測定値が修正され、測定誤差が補償される。例えば、修正された測定値は、WLAN規格に基づいた位置決め、または、ナビゲーションシステムのための、上で既に説明したデータベースのための基準位置として、使用できる。
【0018】
この発明の上述の目的,その他の目的,特徴および利点は、図面を基準して行う以下の発明を実施するための形態の説明から一層明らかとなろう。
【図面の簡単な説明】
【0019】
【図1】本発明に係る、地理的位置の現在の測定値を地図対象物に割り当てるための装置の機能を説明するための説明図である。
【図2】本発明に係る、地理的位置の現在の測定値を地図対象物に割り当てるための方法を説明するためのブロック図である。
【図3a】第1の確率測度を決定するための部分確率の確率関数の一例を示すグラフである。
【図3b】第1の確率測度を決定するための部分確率の確率関数の一例を示すグラフである。
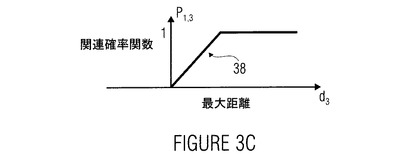
【図3c】第1の確率測度を決定するための部分確率の確率関数の一例を示すグラフである。
【図4】第1の確率測度を決定する方法のフローチャートである。
【図5a】第2の確率測度を決定するための部分確率の確率関数の一例を示すグラフである。
【図5b】第2の確率測度を決定するための部分確率の確率関数の一例を示すグラフである。
【図6】第2の確率測度を決定する方法のフローチャートである。
【図7】前の割り当ての試みが失敗したとき、正しい地図対象物を見つける可能性を説明するための説明図である。
【図8】基準データを改良するための装置を示すブロック図である。
【発明を実施するための形態】
【0020】
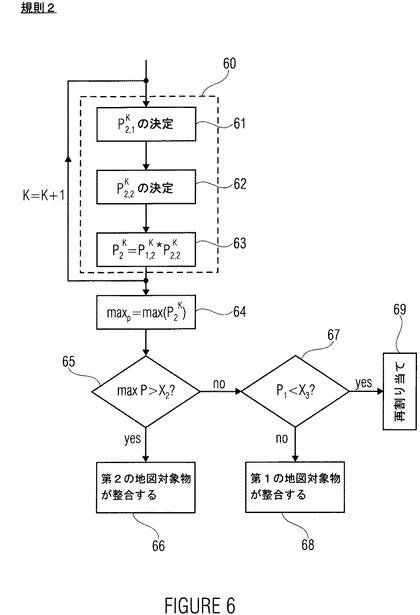
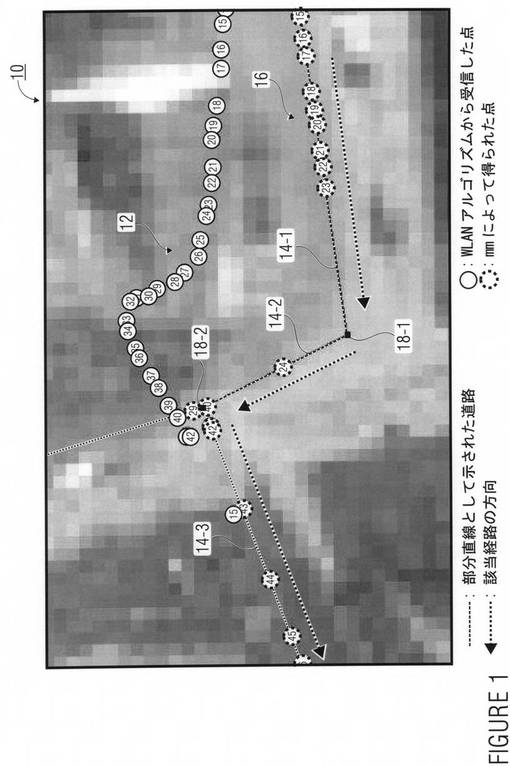
図1はデジタル地図10の(大きく拡大した)領域を示す。
【0021】
地理的位置の一連の隣接未加工測定値12が、地図10に示されている。これらの測定値12は、図1に点線矢印によって示されているように、実際に歩いたルートに沿って決定されている。したがって、測定値12は、区域的に線で形取られた地図対象物14として、地図10の中に示された道路区域に沿って、実際に記録されている。道路区域は、交差点18−1,18−2で交差している。測定位置12は、結局、道路区域14の上の実際の地理的位置に、非常に不正確に対応するだけである、ことが明確に認められる。したがって、様々な応用において、それぞれの測定点12を、正しい道路14−1,14−2,14−3にそれぞれ割り当てることが要求される。
【0022】
仮に、明白な方法で、正投影法が、測定点の最短距離と見做して、それぞれの道路に実行されるならば、少なくとも区域的に線で形取られた地図対象物(道路)14−1,14−2,14−3の上に映し出された点16によって示されるように、非常に不十分な照合結果だけが得られる。
【0023】
したがって、本実施形態によれば、以下において図2〜図8に基づいてさらに詳細に説明されるように、正しい地図対象物(道路)14を、測定点12にそれぞれ割り当てるために、規則が定められる。
【0024】
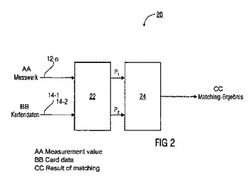
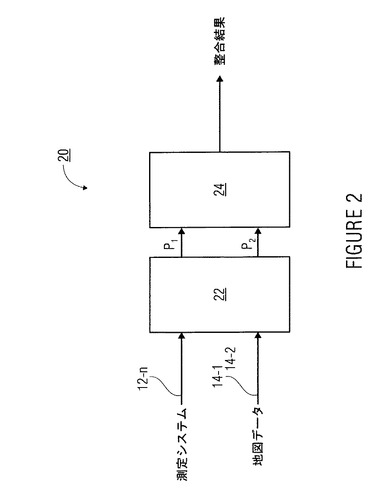
図2は、地理的位置の現在の測定値12−nを、地理的地図の地図対象物14に割り当てるための装置20のブロック図を、模式的に示す。現在の測定値12−nは、隣接地理的位置(n=1,2,・・・,N)の、一連の隣接測定値(12−1,・・・,12−N)から発生する。したがって、指数nは、実際の割り当て回数を意味する。
【0025】
装置20は、第1の確率測度P1を決定するための処理装置22を含む。第1の確率測度P1は、現在の測定値12−nが、少なくとも区域的に線で形取られた第1の地図対象物(道路)14−1に割り当てられるかどうかを示す。一連の隣接測定値(12−1,・・・,12−N)のうち、少なくとも1つの隣接測定値または前の測定値12−1,・・・,12−(n−1)が、事前に、地図対象物(道路)14−1に割り当てられている。さらに、仮に、第1の確率測度P1が、現在の測定値12−nを第1の地図対象物(道路)14−1に割り当てることは、ありそうもない、ことを示せば、処理装置22は、第2の確率測度P2を決定するために役立つ。第2の確率測度P2は、現在の測定値12−nが、少なくとも区域的に線で形取られた第2の地図対象物(道路)14−2に割り当てられるかどうかを示す。地図対象物(道路)14−2は、第1の地図対象物(道路)14−1との交差点18を有する。
【0026】
第1の確率測度P1は、第1の地図対象物(道路)14−1に割り当てられ、そして、実際に、現在の測定点12−nが第1の地図対称物(道路)14−1に割り当てられることが、どの位ありそうであるか、を示す。第2の確率測度P2は、第2の地図対象物(道路)14−2に割り当てられ、そして、実際に、現在の測定点12−nが第2の地図対称物(道路)14−2に割り当てられることが、どの位ありそうであるか、を示す。その結果、好ましくは、本実施形態は、交差点などの重大な位置で、ルートの変更(例えば、道路の変更)が行われるかどうか、そして、仮に、ルートの変更が行われるとすれば、どの方向のルートかを決定するために、使用できる。このため、本実施形態に従って、規則が、第1の確率測度P1、および/または、第2の確率測度P2を決定するために定められる。次に、確率測度P1,P2は、確率測度P1,P2に基づいて、現在の測定点12−nが割り当てられる地図対象物を、二者択一的に選択する選択手段24に供給される。
【0027】
最初に、第1の確率測度P1の決定が、さらに詳細に解明される。
【0028】
本実施形態によれば、第1の確率測度P1を決定するために、様々な部分確率測度または割り当て確率が決定され、次に、確率測度P1に結合される。
【0029】
第1の割り当て確率P1,1の決定が、図3aに基づいて説明される。
【0030】
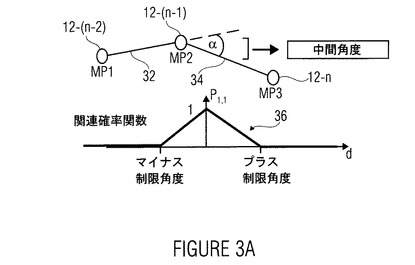
図3aは、現在の測定点(値)12−nと、前の隣接測定点(値)12−(n−1),12−(n−2)を示す。2つの隣接測定値12−(n−1),12−(n−2)は、既に、第1の地図対象物(例えば、道路)14−1に割り当てられている、と仮定される。今、現在の測定値(現在、地図対象物に割り当てられる測定値)12−nが、第1の地図対象物14−1、または、少なくとも区域的に線で形取られた第2の地図対象物14−2のいずれに割り当てられるのかを、決定されなければならない。地図対象物14−2は、第1の地図対象物14−1と交差している。この質問は、例えば、現在の測定点12−nに近い交差点の場合だけでなく、多角形によってモデル化された他の地図対象物の場合にも起こる。
【0031】
処理装置22は、現在の測定値12−nのために、第1地図対象物14−1に関して第1の割り当て確率P1,1を決定するように構成される。その結果、第1の割り当て確率P1,1は、現在の測定値12−nが、前の少なくとも2つの測定値12−(n−2),12−(n−1)によって定義された(最良適合)線32から、どの位大きく逸脱するかに依存する。したがって、図3aによれば、線34は、現在の測定値12−nと前の測定値12−(n−1)とを通る。線34は、角度αで線32に交差する。線32と線34との間の角度αが、小さければ小さいほど、すなわち、前の測定値12−(n−2),12−(n−1)によって予測されたルートからの現在の測定値12−nの逸脱が、小さければ小さいほど、前の測定値12−(n−2),12−(n−1)と同様に、現在の測定値12−nが、少なくとも区域的に線で形取られた第1の地図対象物14−1に割り当てられるという確率が、より高くなる。ここでは、単に例示的に、2つの隣接測定値12−(n−2),12−(n−1)だけが考えられる。隣接値のより大きな数は、設計パラメータであり、したがって、また、可能である。
【0032】
これは、中間角度α、または、線32からの逸脱が、小さければ小さいほど、第1の割り当て確率P1,1が、より高くなることを意味する。これは、例示的確率関数(p関数)または確率密度関数36によって図式的に示される。第1の割り当て確率P1,1は、中間角度αに対して直接に、(ここに示されているように)記入される。その結果、第1の割り当て確率P1,1の値が、直接、読まれる。確率密度関数の場合、第1の割り当て確率P1,1は、可能な範囲の角度を横切って確率密度を統合することによって生じる。中間角度αの決定は、連続した測定値12−(n−2),12−(n−1),12−nの座標が互いに異なること、すなわち、連続した測定値12−(n−2),12−(n−1),12−nが連続した動きを反映することを、明らかに要求する。中間角度αの決定のために、互いに所定の最小距離を有している連続した測定値だけが、使用されるべきである。そうでなければ、信じがたい結果が生じる。したがって、実施形態によれば、動きの静止、または、現在の測定値の割り当てに関して、あまりにも遅い動きを検出するための準備が成される。そして、第1の割り当て確率P1,1の決定のために、類似の連続した測定値をそれぞれ無視するための準備が成される。または、類似の連続した測定値をそれぞれ考えるための準備が成される。
【0033】
図3aに示された確率関数36は、以下の確率関数と同様に、単に例示に過ぎず、したがって、明らかに異なるコースを取ることができることに注目するべきである。確率関数は、個々の割り当て確率がどのように形成されるかを、質的な方法で単に描くことである。
【0034】
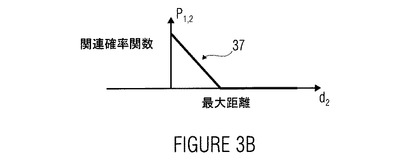
処理装置22は、さらに、現在の測定価値の12−nに対して、第1の地図対象物14−1に関する第2の割り当て確率P1,2を決定するように構成される。第2の割り当て確率P1,2は、現在の測定値12−nが、第1の地図対象物14−1からどの位遠くに離れているかに依存する。そのため、距離d2は、現在の測定値12−nの正投影、すなわち、線で形取られた第1の地図対象物14−1に対する座標によって実行される。地図対象物に映し出された測定値と現在の測定値12−nとの間の距離d2は、現在の測定値12−nと第1の地図対象物14−1との間の暗示距離を表す。例えば、距離d2が、地理的な経度および緯度仕様を使用することによって決定されるか、または、デカルト座標の手段によって決定されるかどうかは、重要ではない。
【0035】
第2の割り当て確率P1,2に関する可能確率関数37は、図3bに例示的に示されている。基本的に、第2の割り当て確率P1,2が高ければ高いほど、現在の測定値12−nは、最後の測定値が割り当てられた第1の地図対象物(道路)14−1に近いことが認められる。ここで、実際に使用された確率(密度)関数は、再び異なる。
【0036】
第1の確率測度P1は、さらに、第3の割り当て確率P1,3を含むことによって、決定される。そのため、処理装置22は、現在の測定値12−nに対して、第1の地図対象物14−1に関して第3の割り当て確率P1,3を決定するように構成される。その結果、第3の割り当て確率P1,3は、現在の測定値12−nが、第1の地図対象物14−1と第2の地図対象物14−2との交差点18からどの位遠くに離れているかに依存する。この距離は、以下、距離d3と称される。したがって、例えば、距離d3は、次の可能な街路の角までの距離を意味する。現在の測定値12−nまたはその割り当てられた地理的位置が、交差点18から遠ければ遠いほど、現在の測定値12−nが第2の地図対象物14−2に割り当てられることは、より一層ありそうもない。逆もまた同様である。これは、距離d3が大きければ大きいほど、現在の測定値12−nが第1の地図対象物14−1に割り当てられることは、より一層ありそうなことである、ことを意味する。この相関関係は、明らかに異なる図3cに示した確率関数38に基づいて例示的に示される。
【0037】
3つの割り当て確率P1,1,P1,2,P1,3から、第1の確率測度P1は、例えば、P1=f(P1,1,P1,2,P1,3)=P1,1・P1,2・P1,3に従って決定される。それぞれの割り当て確率P1,1,P1,2,P1,3が、0と1との間にあるので、第1の確率測度P1も、0と1との間にある(0≦P1≦1)。動きの静止を検出した場合、すなわち、現在の測定点が、前の測定と非常に似ている、または、等しい場合(例えば、P1,1=1)、(中間角度αは信頼性良く決定できないので、)この場合に信頼性のない第1の割り当て確率P1,1を無視することが選択される。
【0038】
第1の確率測度P1が決定されるとき、第1の確率測度P1は、第1の閾値X1と比較される。仮に、第1の確率測度P1が、第1の閾値X1を超えている(例えば、X1≦P1)ならば、現在の測定値12−nは、第1の地図対象物14−1に割り当てられる。これは、例えば、線で形取られた第1の地図対象物14−1への測定座標の正投影によっても実行できる。明らかに、他の地図規則も可能である。
【0039】
仮に、第1の確率測度P1が、第1の閾値X1未満である(例えば、P1≦X1)ならば、現在の測定値12−nは、第1の地図対象物14−1ではなく、第2の地図対象物14−2に割り当てられるべきであると想定されなければならない。この場合、例えば、第1の道路から第2の道路(第1の道路に交差している道路)への道路変更が実行される。
【0040】
第2の地図対象物14−2への現在の測定値12−nの割り当てが、確率として、どのようにして保護されるかが、図5および図6に基づいて説明される前に、第1の確率測度P1を決定するための規則が、図4に基づいて、以下に纏められる。
【0041】
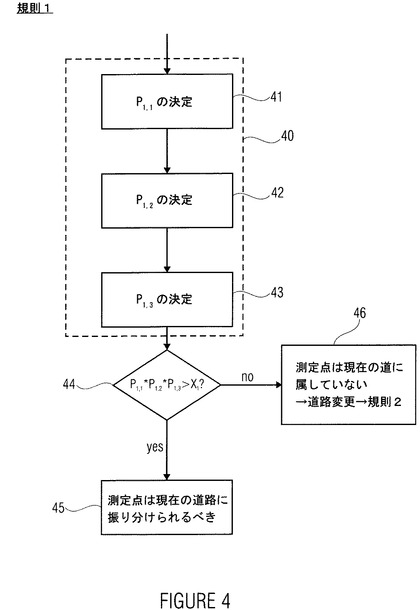
ステップ40では、第1の確率測度P1が決定される。第1の確率測度P1は、現在の測定値12−nが、第1の、少なくとも区域的に線で形取られた地図対象物14−1に割り当てられるかどうかを示す。一連の隣接測定値のうち、少なくとも1つの隣接測定値は、事前に、既に、地図対象物14−1に割り当てられている。既に上で議論したように、ステップ40は、3つの副ステップに分割される。
【0042】
第1の副ステップ41では、第1の割り当て確率P1,1は、上で説明したように決定される。その後の副ステップ42,43では、さらに、第2および第3の割り当て確率P1,2,P1,3が、既に説明したように決定される。
【0043】
次のステップ44では、3つの割り当て確率P1,1,P1,2,P1,3を含む第1の確率測度P1が、第1の閾値X1と比較される。
【0044】
仮に、ステップ44の比較が、第1の確率測度P1が第1の閾値X1より高いという結果を生ずるならば、現在の測定値12−nは、例えば、現在の道路に、すなわち、ステップ45における第1の線で形取られた地図対象物14−1に割り当てられる。
【0045】
しかしながら、仮に、ステップ44の比較が、第1の確率測度P1が十分高くないという結果を生ずるならば、現在の測定値12−nは、第1の地図対象物14−1に属さない。そして、ステップ46で、現在の測定値12−nが、第2の地図目的14−2に割り当てられるかどうかが、チェックされる。これは、第2の確率測度P2を決定することによって実行される。第2の確率測度P2は、以下で、さらに詳細に議論される。
【0046】
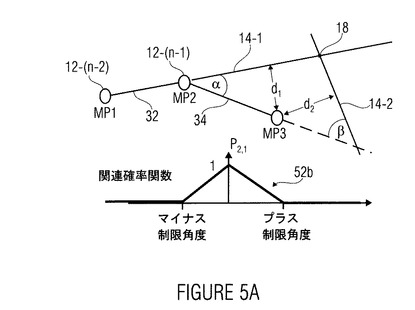
図5aは、図3aと等しい、一連の隣接測定点12−(n−2),12−(n−1),12−nを示す。
【0047】
第2の地図対象物14−2に関する第4の割り当て確率P2,1は、線34と、少なくとも区域的に線で形取られた第2の地図対象物14−2)と、の間の中間角度βに依存するように作られる。この中間角度βが、小さければ小さいほど、地図対象物14−2と線34とは、より「平行」になり、そして、現在の測定点12−nを第2の地図対象物14−2に割り当てることに関して、第4の割り当て確率P2,1は高くなる。この相関関係は、確率関数52bによって例示的に示される。
【0048】
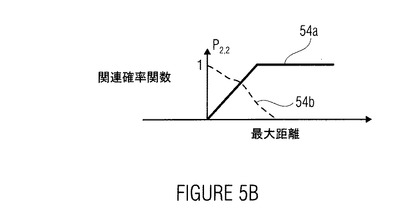
さらに、処理装置22は、現在の測定値12−nに対して、第2の地図対象物14−2に関する第5の割り当て確率P2,2を決定するように構成される。第5の割り当て確率P2,2は、例えば、現在の測定値12−nが、第1の地図対象物14−1からどの位遠くに離れているか(距離d1)、に依存する。特に、第1の地図対象物14−1が、現在の測定値12−nからの興味がある半径内で、唯一、少なくとも区域的に線で形取られた第2の地図対象物14−2によって切られるとき、第5の割り当て確率P2,2は、この様にして決定される。しかしながら、数個の可能な少なくとも区域的に線で形取られた第2の地図対象物14−2に対して、この手順は役に立つ情報を提供しない。議論した第5の割り当て確率P2,2に導く確率関数54aは、図5bに図式的に示されている。確率関数54aから、第5の割り当て確率P2,2が、高ければ高いほど、第1の地図対象物14−1から現在の測定値12−nまでの距離d1は、より大きくなる、ということは明白となる。
【0049】
好ましい実施形態によれば、処理装置22は、現在の測定値12−nに対して、第2の地図対象物14−2に関する第5の割り当て確率P2,2を決定するように構成される。第5の割り当て確率P2,2は、現在の測定値12−nが、第2の地図対象物14−2からどの位遠くに離れているか(距離d2)、に依存する。上で説明した代替手段に関して、これは、数個の可能な少なくとも区域的に線で形取られた第2の地図対象物14−2に、特に有利である。対応して、第5の割り当て確率P2,2(符号54bを参照)が高ければ高いほど、第2の地図対象物14−2から現在の測定値12−nまでの距離d2が、より小さくなる。第5の割り当て確率P2,2を決定するための上で説明した2つの方法の組み合わせも、明らかに可能である。その結果、第5の割り当て確率P2,2は、距離d1に正比例し、同時に、距離d2に反比例している。
【0050】
本実施形態によれば、第2の確率測度P2は、第4および第5の割り当て確率、すなわち、P2=f(P2,1,P2,2)に基づいて決定される。特に、第2の確率測度P2は、P2=P2,1・P2,2に従って決定される。
【0051】
第1の地図対象物14−1の形式の道路は、一般に、(第2の地図対象物14−2の形式の)交差道路を1つだけ有するものではなく、多数の交差道路を有するので、第2の確率測度P2は、現在の道路に交差するそれぞれの可能な道路ごとに決定される。可能な交差道路、すなわち、第2の地図対象物は、期待されるべき現在の測定点の測定精度に依存して、現在の測定点12−1の周囲の予め決められた地理的半径内で決定される。K個の第2の地図対象物14−2が可能である場合、K個の第2の確率測度P2k(k=1,・・・,K)が、それぞれ、K個の第2の地図対象物14−2ごとに決定される。本実施形態によれば、最もありそうな第2の地図対象物14−2は、K個の第2の確率測度P2k(k=1,・・・,K)を横切る最大値構成から生じる。これは、maxP2=P2k=max(P21,・・・,P2k)が適用されるk番目の第2の地図対象物14−2が、選択されることを意味する。
【0052】
仮に、選択された第2の確率測度maxP2が、第2の閾値X2より高ければ、現在の測定値12−nは、maxP2に属する選択された第2の地図対象物14−2に割り当てられるべきであると想定される。しかしながら、仮に、選択された第2の確率測度maxP2が、第2の閾値X2より低いならば、第1の確率測度P1は、現在の測定値12−nのために、再び考慮される。仮に、第1の確率測度P1が第3の閾値X3(第3の閾値X2は、第1の閾値X1より低い)より高いならば、現在の測定値12−nは、そのまま、第1の地図対象物14−1に割り当てられる。しかしながら、仮に、第1の確率測度P1が第3の閾値X3より低いならば、最後の測定値12−(n−1),12−(n−2)の割り当ての間に、何かが既に「支障をきたした」と想定される。この場合、現在の測定値12−nの配置または割り当てが、再び実行されなければならない。
【0053】
これが議論される前に、第2の確率測度P2の決定が、図6に基づいて纏められる。
【0054】
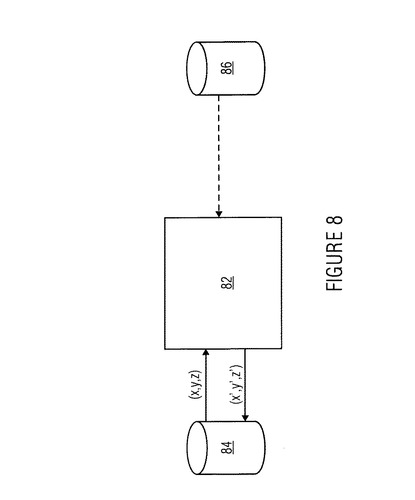
図6は、第2の確率測度P2を決定するステップ60を示す。仮に、第1の確率測度P1が、現在の測定値12−nを第1の地図対象物14−1へ割り当てることがありそうもないことを指示するならば、第2の確率測度P2は、現在の測定値12−nが、少なくとも区域的に線で形取られた第2の地図対象物14−2に割り当てられるかどうかを指示する。第2の地図対象物14−2は、第1の地図対象物14−1と交差点18を有する。
【0055】
上で説明したように、ステップ60は、循環経路によって示されるように、複数の可能な第2の地図対象物ごとに実行される。さらに、ステップ60は、副ステップ61,62,63に分割される。第1の副ステップ61では、第1の割り当て確率P2,1kが、それぞれの可能な第2の地図対象物ごとに決定される。第2の副ステップ62では、第5の割り当て確率P2,2kが決定される。
【0056】
第4および第5の割り当て確率P2,1k,P2,2kから、第2の確率測度P2kが、第3の副ステップ63で計算される。副ステップ61,62,63は、言及したように、それぞれの可能な第2の地図対象物k(k=1,・・・,K)ごとに実行される。その結果、K個の第2の確率測度が、最大値構成のためにステップ64に供給される。仮に、最大確率測度maxP2が決定されるならば、最大確率測度maxP2は、ステップ65で第2の閾値X2と比較される。仮に、最大確率測度maxP2が第2の閾値X2を超えるならば、現在の測定値12−nは、ステップ66で、最大確率測度maxP2が属する第2の地図対象物14−2に割り当てられる。
【0057】
しかしながら、仮に、最大確率測度maxP2が第2の閾値X2未満ならば、第1の確率測度P1の考慮が、現在の測定価値の12−nに対して、再び実行される。第1の確率測度P1は、ステップ67で、第3の閾値X3(<X1)と比較される。仮に、このステップ67の比較で、第1の確率測度P1が第3の閾値X3を超えているという結果を生じるならば、現在の測定値12−nは、ステップ68で、第1の地図対象物14−1に割り当てられる。
【0058】
仮に、ステップ67の比較が、第1の確率測度P1が第3の閾値X3未満であるという結果を生じるならば、虚偽の陳述が、最後の測定値12−(n−1),12−(n−2)の割り当ての間に作られた、という確率が高い。この場合、ステップ69の再割り当てが、現在の測定値12−nに対して行われる。この再割り当ては、以下で説明される。
【0059】
再割り当てのオプションは、図7に模式的に示される。
【0060】
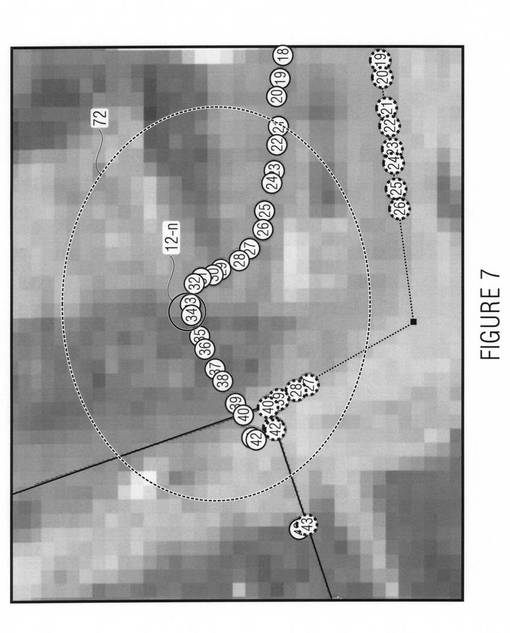
現在の測定値(測定点)12−nに対して、付近検索が実行される。このため、地図対象物(例えば、道路)が、現在の測定値12−nの周囲の予め定義された地理的付近72内で検索される。このため、現在の測定値12−nは、それぞれの道路(例えば、付近72の全ての道路)までの距離を見つけるために、それぞれの道路に正投影法で写像される。現在の測定値12−nまでの距離が最も短い道路が、地図対象物として選択され、現在の測定値12−nが、選択された地図対象物に割り当てられる。
【0061】
次に、現在の測定値12−nの再割り当てに対しては、確率測度が、第2の確率測度P2に対応して決定される。第2の確率測度P2の計算は、図5a、5bおよび6に基づいて既に議論されている。これは、測定値12−n,12−(n−1)を通る線34が、再割り当てされるべき区域的に線で形取られた地図対象物14−2に関連することを意味する。現在の測定値12−nは、地図対象物14−2までの距離が最も短い。その中で、測定値12−n,12−(n−1)を通る線34と再割り当てされるべき地図対象物14−2との間の中間角度βが、考えられる。この中間角度βが小さければ小さいほど、再割り当てされた地図対象物に、現在の測定点12−nの正しい割り当てをすることに関して、再割り当てされるべき地図対象物14−2と線34とが、より平行であり、そして、割り当て確率P2,1が、より高い。上で既に説明したように、再割り当てされた地図対象物に関する割り当て確率P2,2は、現在の測定値12−nに対して決定される。割り当て確率P2,2は、現在の測定値12−nが、再割り当てされるべき地図対象物14−2から、どの位遠くに離れているかに依存する。本実施形態によれば、再割り当てのための確率測度P2は、割り当て確率P2,1および割り当て確率P2,2に基づいて、すなわち、P2=f(P2,1,P2,2)に基づいて決定される。特に、再割り当てのための確率測度P2は、P2=P2,1・P2,2に従って決定される。
【0062】
ここで提示された概念は、例えば、リアルタイム(実際にはリアルタイム)でナビゲーションする場合と、後で地理的基準データ(地図データ)に沿って運転する、または、歩くルートを照合する場合との両方に使用できる。このように、本実施形態は、どのルートが都市やビルなどを通って取られるか、を表示できる。
【0063】
また、本実施形態は、WLAN規格に基づいた位置決めまたはナビゲーションシステムのために使用されるべき基準データを改良のためにも適用される。始めに、地理的基準位置ためのHF指紋を有する基準測定パケットの形式の基準データが、WLAN規格に基づいたナビゲーションシステムのために決定されなければならないことは、既に説明されている。ここで考慮するWLAN規格に基づいた位置決めシステムは、基本的方法として、受信信号強度(RSS)指紋を使用する。この方法は、現在の位置で受信する、または、受信できる、いくつかの放送局の無線信号の信号強度が、現在の位置を明白に特徴付けるという想定に基づいている。仮に、基準データベースが、多数の基準位置、基準点で受信する(または、受信できる)放送局の送信機識別、および、対応する無線信号の信号強度を含みながら、存在するならば、現在の位置が、現在測定された測定値とデータベースの基準値との照合によって、1連の現在の測定値(送信機識別と関連信号強度値)から推論できる。この照合は、全ての基準点ごとに、その前に記録された測定値または基準値が、現在の位置の現在の測定値と、どの位類似しているかを評価する。次に、最も類似の基準点が、携帯端末装置の現在の位置の期待値の基礎として使用される。
【0064】
基準測定時に基準位置で受信できる無線送信機の信号強度は、基準データベースごとに、基準測定によって実験的に決定される。結果は、基準測定が実行された全ての基準位置に対して、それぞれの関連受信電磁界強度と品質とを含んでいる無線送信機(アクセス点)のリストを含むデータベースである。このリストは、基準パケットとも称される。WLAN構成で、そのような基準データベースは、以下のパラメータを例示的に含む。
【0065】
【表1】

【0066】
【表2】
【0067】
【表3】
【0068】
表1、表2、表3において、「RID」は基準位置識別を表し、「MAC」は受信された放送局のアドレスを表す。「RSSI(Received Signal Strength Indicator)」は、無線送信機の受信電磁界強度を表し、例えば表1中の数字46530は、−46.530dBmを意味する。「X」、「Y」、「Z」は、デカルト座標の基準位置を表し、例えば、表3の「X」中の数字24583は、245.83mを意味する。「CREATED」は、測定値を取った時間を表す。
【0069】
「PGS(%)」は、測定値を取るとき、この放送局が、割合ベースで、どの位の頻度で見られたかを示す。すなわち、PGS=90(%)は、放送局が、平均10回の測定のうち9回で測定されたことを意味する。
【0070】
上で示した表において、基準位置識別(RID)に関連した全ての情報が、基準測定パケットに対応している。これは、上の例示的表が、3つの異なる地理的基準位置に対応する3つの基準測定パケットを含むことを意味する。
【0071】
位置決めしているとき、現在受信された無線送信機が、照合段階で、基準データベースからの基準パケットと比較される。無線送信機は、それぞれの関連受信電磁界強度(測定パケット)を含む。現在の測定パケットまでの距離がより短い基準パケットが、すなわち、多数の共通無線送信機とわずかに異なって受信された電磁界強度が、現在の測定パケットに良く合致する。良く合致した基準パケットに属する基準位置は、非常にありえそうであり、位置を計算する段階で考慮される。位置計算段階は、基準位置から、携帯端末装置の位置を計算する。携帯端末装置の位置の期待値は、位置計算段階の結果である。期待値の品質は、特に、基準パケット(特に基準位置)の品質に依存する。
【0072】
基準位置は、例えば、GPS受信機によって決定される。説明したように、そのようなGPS受信機は限られた程度の精度しかない。次に、説明された概念によって、保存された測定パケットの記録された基準位置が、修正され、地図対象物に割り当てられる。その結果、データベースに保存された基準位置の精度が、大きく向上する。
【0073】
したがって、本実施形態は、地理的基準位置の測定座標と、測定座標に割り当てられた基準測定パケットと、を有する基準データを改良するための概念を提供する。基準測定パケットは、地理的基準位置で決定された基準送信機識別と、基準時に基準位置で受信できる無線送信機の電磁界信号特性を有する。したがって、地理的基準位置の実際の座標に不正確に対応する測定座標は、測定座標の付近内にある地理的地図の地図対象物の座標に照合され、測定座標より地理的基準位置の実際の座標に良く対応する改良座標を得る。その後、改良座標は、基準測定パケットに割り当てられる。
【0074】
これに関して、図8は、データベース84に結合した処理装置82を示す。処理装置82は、データベース84から、基準測定パケット、特に、地理的基準位置の座標(x,y,z)を受信できる。
【0075】
したがって、処理装置82は、上で説明した処理装置22を含む。処理装置22は、地理的基準位置の座標に不正確に対応する測定座標(x,y,z)を、測定座標の付近内にある地理的地図の地図対象物14の座標に照合し、測定座標より地理的基準位置の実際の座標に良く対応する改良座標(x´,y´,z´)を得るように調整される。さらに、処理装置22は、改良座標(x´,y´,z´)を基準測定パケットに割り当てる、または、測定座標(x,y,z)を改良座標(x´,y´,z´)に置き換えるように調整される。
【0076】
地図対象物に対応するデジタル地図データは、例えば、地図データベース86から得られる。このため、図8に示されるように、処理装置82は地図データベース86に結合される。
【0077】
測定座標(x,y,z)の付近内の地図対象物は、例えば、測定座標(x,y,z)の周囲の付近検索によって決定される。明らかに、付近の半径は、それぞれの応用と測定精度とに依存し、例えば、100m未満(特に30m未満)である。
【0078】
無線信号の電磁界特性は、無線信号の受信電磁界強度、受信パワースペクトル、信号対雑音比(SN比)、入射角、伝播時間、分極または位相位置などに関連した信号特性である。基準送信機識別は、例えば、基準位置で受信できる無線送信機のMACアドレスから成る。
【0079】
したがって、割り当てられた基準測定パケット(すなわち、受信できるWLAN送信機の放送指紋)が記録されている基準位置は、比較的不正確な方法で測定される。例えば、測定は、どんなルートに沿った運転または徒歩でも、これらのルートに沿った間隔で測定パケットを記録することによって行われる。例えば、測定パケットは、応用によって、2〜30秒ごとに記録され、データベース84に保存される。運転または徒歩のために、例えば、プロの運転手(例えば、タクシー運転手、バス運転手など)、郵便配達人またはバイク便運転者のために使用される。すなわち、特定の領域内を、毎日、とにかく移動している人々のために、基準データは記録されるべきである。これは、基準データベース84の比較的単純で費用対効果に優れた発生を許容する。
【0080】
次に、処理装置82は、提供された方法を使用して、後工程(地図照合工程)によって、測定基準位置を、運転または徒歩したルートに対応する高精度な地図データに照合できる。このため、処理装置82は、基準測定パケットが測定基準位置と共に保存されるデータベース84へのアクセスだけを必要とする。また、それぞれの高精度な地図の材料へのアクセスは、その後の地図照合を行うことができるように要求される。このため、地図データは、適切な地図データベース86から検索される。このため、処理装置82は、地図データを外部のデータベース86から検索するためのインターネットインタフェースのような、適切なインタフェースを持つことができる。基準データベース84は、そのようなインタフェースによって、処理装置82に結合可能である。
【0081】
インタフェースを介して、データベース84に保存された測定パケットの基準位置の測定座標(x,y,z)が受信される。受信された座標に基づいて、測定座標(x,y,z)が位置している地理的領域に関して、評価が成される。これは、処理装置82が、処理装置82に結合された測定座標(x,y,z)に基づいた地図データベース86から、地理的地図の材料を要求することを可能にする。そのような地図データベース86は、多数回かつ頻繁に、無料で利用可能である。(デジタル)地図データベース86の地図データは、道路、経路またはビルなどのような地図対象物の高精度な地理的座標を含む。そのため、本発明の概念によって、ここで説明された地図照合によって、測定座標(x,y,z)を高精度な地図データに照合することは、可能である。この高精度な地図データを有する測定座標(x,y,z)の照合は、基準測定パケットの全ての測定位置ごとに実行される。地図照合が実行された後、基準位置の改良座標(x´,y´,z´)は、データベース84に書き戻される。好ましくは、基準測定パケットの古い測定座標(x,y,z)は、新しい改良座標(x´,y´,z´)に置き換えられる。
【0082】
したがって、本実施形態は、WLAN規格に基づいた位置決めシステムなどのような、指紋に基づいた位置決めシステムのための高精度な基準データベースを供給することを助ける。したがって、補正プロセスの位置精度は、高精度である必要はない。その結果、複雑で高価なGPS受信装置は必要でない。測定基準位置の精度は、測定位置を高精度な地図データに照合することによって、次の後工程で得られる。したがって、本実施形態は、測定された地理的位置が、WLAN規格に基づいた位置決めまたはナビゲーション装置のための基準位置として使用される、という後工程のオプションを提供する。説明した後工程によって、測定地理的位置の品質は、大きく改良され、したがって、WLAN規格に基づいたシステムにおける放送指紋照合によって得られた位置情報の品質も、大きく改良される。そこでは、最終的に、現在決定された放送指紋が、基準位置での保存された放送指紋と比較される。そして、それに基づいて、現在の地理的位置の期待値が、基準位置の助けで決定される。
【0083】
最後に、本発明に係る方法は、環境によって、ハードウェアまたはソフトウェアの中で実現されることに注目するべきである。実現は、電子的に読み込み可能な制御信号を有するデジタル記憶媒体、特に、ディスク、CDまたはDVDで成される。デジタル記憶媒体は、発明の方法が実行されるように、プログラム可能コンピュータシステムと協働する。したがって、一般に、コンピュータプログラム製品がコンピュータ、および/または、マイクロコントローラ上で稼動するとき、本発明は、発明の方法を実行するための機械読取可能な担持体に、プログラムコードを保存するコンピュータプログラム製品から成る。言い換えれば、本発明は、コンピュータプログラムが、コンピュータ、および/または、マイクロコントローラ上で稼動するとき、現在の測定値を割り当てるための方法を実行するためのプログラムコードを有しているコンピュータプログラムとして実現される。
【技術分野】
【0001】
本発明は、例えば、地理的位置の現在の測定値の精度を改良するために用いることができる、地理的位置の現在の測定値を、地理的地図または地図対象物に割り当てるための装置および方法に関する。
【背景技術】
【0002】
道路または経路を運転または歩行しながら、一定の間隔ごとに、それぞれの地理的位置の測定値を決定するとき、使用される方法によって、多かれ少なかれ、重大な誤りが生じる。現在、最も広範囲のナビゲーションシステムは、全地球側位システム(GPS)である。人工信号歪みが、数年前に除去されて以来、ほとんど努力しないで、10m〜15mの位置精度を得ることができる。その結果、位置精度は、測定時に「見られる」衛星の数に依存する。一般的に、測定精度は受信衛星の数によって増加する、と言うことができる。
【0003】
しかしながら、仮に、車や人が、一部高層建築された都市部の中の道路または路地を移動しているならば、ビルが衛星の照準線を隠すことが起きる。したがって、GPSによって達成可能な測定精度は減少する。仮に、衛星位置決定システムによって測定された地理的未加工データが、地理的な町内地図または地図に置かれるならば、比較的信じがたい位置の指示が生じる。その位置の指示は、通常、少ししかナビゲーション装置の実際の地理的位置を有さない。これは、特に、10m〜15mの精度さえ信じがたい結果をもたらす路地や小道に適用される。特に、交差点では、不正確に測定された点が、どの道路に割り当てられるかを決定することは、困難である。
【0004】
その結果、ナビゲーションシステムによって測定された地理的未加工データは、頻繁に、地図データと照合される。その結果、例えば、運転手は、彼の乗り物のナビゲーション装置の表示画面のもっともらしい位置情報を受信する。仮に、例えば、位置決定の精度が現在、約50mであって、運転手が湖の傍の道路に沿って移動する場合、ナビゲーション装置の表示画面上の乗り物の位置が、道路上ではなく、湖の中に指示されることは、非常に紛らわしい。未加工の測定値が、湖の中の(間違っている)位置を提供しても、非常に紛らわしい。この場合、ナビゲーションシステムは、そのような位置が道路ナビゲーションシステムにおける適用には非常に適さないということを検出し、地理的地図の表示画面のために、測定された地理的位置を、例えば、道路上のもっともらしい位置に対応するように修正する。
【0005】
例えば、WLAN(ワイヤレス・ローカル・エリア・ネットワーク)規格に基づいた無線放送網の増加する分布のために、これらの無線放送網は、新しい位置決め方法の基礎として自薦する。WLAN規格を基礎とする位置決めシステムでは、いわゆる受信信号強度(RSS)指紋が、基本的方法として、頻繁に使用される。この方法は、いくつかの放送局の無線信号の信号強度が、明白に特徴のある現在の位置または現在の地理的位置を、現在の位置で受信する、または、受信できるという仮定に基づいている。仮に、多数の地理的基準位置(または基準位置)を含む基準データベースが存在し、放送局の送信機識別を、対応する無線信号の信号強度と同様に、現在の位置で基準時間に受信する、または、受信できるならば、現在の位置は、現在の測定値とデータベースの基準値とを照合することによって、現在の測定値の一組(送信機識別と関連信号強度値)から推論できる。この照合は、全ての基準点に対して、それ事前に記録された測定値または基準値が、現在の位置の現在の測定値に、どの位、類似しているかを評価する。最も類似の基準点が、携帯端末装置の現在の位置の仮定値の基礎として使用される。
【0006】
このことから、そのようなWLAN規格の位置決めシステムの精度が、基準データベースの基準位置の品質に、特に、依存することは、明白である。基準測定時に基準位置で受信できる無線送信機の信号強度は、基準データベースごとに、基準測定によって実験的に決定される。これは、基準測定が実行された全ての基準位置の、それぞれの関連受信電磁界強度と品質とを含んでいる無線送信機(アクセス点)のリストを含むデータベースを生じる。その結果、例えば、基準位置は、GPS装置によって決定される。そのような測定値の精度は、上で既に議論した。
また、先行技術としては、特許文献1および特許文献2に記載の技術が知られている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】米国出願公開公報:US 6023653 A
【特許文献2】ヨーロッパ出願公開公報:EP 1022578 A2
【発明の概要】
【発明が解決しようとする課題】
【0008】
それゆえに、本発明の主たる目的は、位置測定値を地理的地図に照合させることによって、位置測定値の精度を向上させることができる、地理的位置の現在の測定値を地図対象物に割り当てるための装置および方法を提供することである。
【課題を解決するための手段】
【0009】
この目的は、独立請求項の特徴を有する装置および方法によって解決される。
【0010】
例えば、第1の道路から第2の道路への変更が行われるとき、測定位置の値を、(デジタル)地図データ、または、道路や経路などの地図対象物に照合するため、確率測度が、不正確な未加工測定値から検出できるように導入される、ということが、本発明の発見である。道路は地図対象物を表す。明らかに、正確な地理的座標は、地図対象物ごとに存在する。仮に、地理的位置の未加工測定値が、本発明の概念に従って、地図対象物に割り当てられるならば、これは、一般に、地理的位置の未加工測定値の価値向上を意味し、精度が改良されるという効果をもたらす。したがって、その後、WLAN規格に基づいた位置決めに対して、改良された位置測定値は、基準測定パケットの基準位置として非常に貴重である。
【0011】
少なくとも2つの最後の測定点にて、現在考えられている測定点の変更は、例えば、確率測度の決定に入れられる。より正確には、例えば、(最良適合)線からの、現在考えられている測定点の逸脱が、考えられる。(最良適合)線は、既に地図対象物に割り当てられた少なくとも2つの最後の測定点を通る。その結果、少なくとも2つの最後に割り当てられた測定点は、道路、経路またはビルなどの地図対象物に割り当てられた測定点を表す。
【0012】
さらに、現在考えられている位置測定値から、考えられている地図対象物(道路など)までの距離も、確率測度の決定に入れられる。
【0013】
現在考えられている測定値が、第1の地図対象物(例えば、道路)、または、第2の地図対象物(例えば、交差点)のいずれに割り当てられるべきかが、質問できるとき、現在の測定値から、第2の地図対象物(交差点)を有する第1の地図対象物(道路)の次の可能な交差点までの距離が、確率測度の決定に入れられる。
【0014】
このために、本発明は、地理的位置の現在の測定値を、地理的地図の地図対象物に割り当てるための装置を供給する。現在の測定値は、隣接する地理的位置の一連の隣接測定値から発生する。本発明に係る装置は、第1の確率測度を決定するための処理装置を含む。第1の確率測度は、現在の測定値が、第1の地図対象物に割り当てられることができるかどうかを指示する。前記一連の隣接測定値のうち、少なくとも1つの隣接測定値は、事前に既に、第1の地図対象物に割り当てられている。そして、決定の際に、仮に、第1の確率測度が、現在の測定値を第1の地図対象物に割り当てることは、ありそうもないことを指示するならば、第2の確率測度は、現在の測定値が、第1の地図対象物との交差点を有する第2の地図対象物に割り当てられることができるかどうか、を指示する。
【0015】
その結果、測定点は、様々な地図対象物に割り当てられる。例えば、屋外の道路、広場、路地、および、屋内の廊下、部屋、床、壁などは、区域的に定義された線から成る多角形として、モデル化される。これは、全ての地図対象物が、少なくとも区域的に線で形取られた地図対象物を再び含むこと、を意味する。
【0016】
さらに、本発明は、地理的基準位置と、地理的基準位置に割り当てた基準測定パケットと、の測定座標を有する基準データを改良するための装置を提供する。基準測定パケットは、地理的基準位置で決定された基準送信機識別と、基準時に基準位置で受信できる無線送信機の電磁界信号特性と、を有する。この装置は、地理的基準位置の実際の座標に近似している測定座標を、地理的地図の地図対象物の座標に照合させるための処理装置を含む。この処理装置は、測定座標より地理的基準位置の実際の座標に一層良く対応する改良座標を得て、改良座標を基準測定パケットに割り当てる。
【0017】
したがって、本発明は、例えばGPSシステムで測定された地理的な未加工測定値を、デジタル地図の地図対象物に割り当てることを許す。地図対象物は、再び、正確な位置情報が提供される。したがって、不正確な未加工の測定値が修正され、測定誤差が補償される。例えば、修正された測定値は、WLAN規格に基づいた位置決め、または、ナビゲーションシステムのための、上で既に説明したデータベースのための基準位置として、使用できる。
【0018】
この発明の上述の目的,その他の目的,特徴および利点は、図面を基準して行う以下の発明を実施するための形態の説明から一層明らかとなろう。
【図面の簡単な説明】
【0019】
【図1】本発明に係る、地理的位置の現在の測定値を地図対象物に割り当てるための装置の機能を説明するための説明図である。
【図2】本発明に係る、地理的位置の現在の測定値を地図対象物に割り当てるための方法を説明するためのブロック図である。
【図3a】第1の確率測度を決定するための部分確率の確率関数の一例を示すグラフである。
【図3b】第1の確率測度を決定するための部分確率の確率関数の一例を示すグラフである。
【図3c】第1の確率測度を決定するための部分確率の確率関数の一例を示すグラフである。
【図4】第1の確率測度を決定する方法のフローチャートである。
【図5a】第2の確率測度を決定するための部分確率の確率関数の一例を示すグラフである。
【図5b】第2の確率測度を決定するための部分確率の確率関数の一例を示すグラフである。
【図6】第2の確率測度を決定する方法のフローチャートである。
【図7】前の割り当ての試みが失敗したとき、正しい地図対象物を見つける可能性を説明するための説明図である。
【図8】基準データを改良するための装置を示すブロック図である。
【発明を実施するための形態】
【0020】
図1はデジタル地図10の(大きく拡大した)領域を示す。
【0021】
地理的位置の一連の隣接未加工測定値12が、地図10に示されている。これらの測定値12は、図1に点線矢印によって示されているように、実際に歩いたルートに沿って決定されている。したがって、測定値12は、区域的に線で形取られた地図対象物14として、地図10の中に示された道路区域に沿って、実際に記録されている。道路区域は、交差点18−1,18−2で交差している。測定位置12は、結局、道路区域14の上の実際の地理的位置に、非常に不正確に対応するだけである、ことが明確に認められる。したがって、様々な応用において、それぞれの測定点12を、正しい道路14−1,14−2,14−3にそれぞれ割り当てることが要求される。
【0022】
仮に、明白な方法で、正投影法が、測定点の最短距離と見做して、それぞれの道路に実行されるならば、少なくとも区域的に線で形取られた地図対象物(道路)14−1,14−2,14−3の上に映し出された点16によって示されるように、非常に不十分な照合結果だけが得られる。
【0023】
したがって、本実施形態によれば、以下において図2〜図8に基づいてさらに詳細に説明されるように、正しい地図対象物(道路)14を、測定点12にそれぞれ割り当てるために、規則が定められる。
【0024】
図2は、地理的位置の現在の測定値12−nを、地理的地図の地図対象物14に割り当てるための装置20のブロック図を、模式的に示す。現在の測定値12−nは、隣接地理的位置(n=1,2,・・・,N)の、一連の隣接測定値(12−1,・・・,12−N)から発生する。したがって、指数nは、実際の割り当て回数を意味する。
【0025】
装置20は、第1の確率測度P1を決定するための処理装置22を含む。第1の確率測度P1は、現在の測定値12−nが、少なくとも区域的に線で形取られた第1の地図対象物(道路)14−1に割り当てられるかどうかを示す。一連の隣接測定値(12−1,・・・,12−N)のうち、少なくとも1つの隣接測定値または前の測定値12−1,・・・,12−(n−1)が、事前に、地図対象物(道路)14−1に割り当てられている。さらに、仮に、第1の確率測度P1が、現在の測定値12−nを第1の地図対象物(道路)14−1に割り当てることは、ありそうもない、ことを示せば、処理装置22は、第2の確率測度P2を決定するために役立つ。第2の確率測度P2は、現在の測定値12−nが、少なくとも区域的に線で形取られた第2の地図対象物(道路)14−2に割り当てられるかどうかを示す。地図対象物(道路)14−2は、第1の地図対象物(道路)14−1との交差点18を有する。
【0026】
第1の確率測度P1は、第1の地図対象物(道路)14−1に割り当てられ、そして、実際に、現在の測定点12−nが第1の地図対称物(道路)14−1に割り当てられることが、どの位ありそうであるか、を示す。第2の確率測度P2は、第2の地図対象物(道路)14−2に割り当てられ、そして、実際に、現在の測定点12−nが第2の地図対称物(道路)14−2に割り当てられることが、どの位ありそうであるか、を示す。その結果、好ましくは、本実施形態は、交差点などの重大な位置で、ルートの変更(例えば、道路の変更)が行われるかどうか、そして、仮に、ルートの変更が行われるとすれば、どの方向のルートかを決定するために、使用できる。このため、本実施形態に従って、規則が、第1の確率測度P1、および/または、第2の確率測度P2を決定するために定められる。次に、確率測度P1,P2は、確率測度P1,P2に基づいて、現在の測定点12−nが割り当てられる地図対象物を、二者択一的に選択する選択手段24に供給される。
【0027】
最初に、第1の確率測度P1の決定が、さらに詳細に解明される。
【0028】
本実施形態によれば、第1の確率測度P1を決定するために、様々な部分確率測度または割り当て確率が決定され、次に、確率測度P1に結合される。
【0029】
第1の割り当て確率P1,1の決定が、図3aに基づいて説明される。
【0030】
図3aは、現在の測定点(値)12−nと、前の隣接測定点(値)12−(n−1),12−(n−2)を示す。2つの隣接測定値12−(n−1),12−(n−2)は、既に、第1の地図対象物(例えば、道路)14−1に割り当てられている、と仮定される。今、現在の測定値(現在、地図対象物に割り当てられる測定値)12−nが、第1の地図対象物14−1、または、少なくとも区域的に線で形取られた第2の地図対象物14−2のいずれに割り当てられるのかを、決定されなければならない。地図対象物14−2は、第1の地図対象物14−1と交差している。この質問は、例えば、現在の測定点12−nに近い交差点の場合だけでなく、多角形によってモデル化された他の地図対象物の場合にも起こる。
【0031】
処理装置22は、現在の測定値12−nのために、第1地図対象物14−1に関して第1の割り当て確率P1,1を決定するように構成される。その結果、第1の割り当て確率P1,1は、現在の測定値12−nが、前の少なくとも2つの測定値12−(n−2),12−(n−1)によって定義された(最良適合)線32から、どの位大きく逸脱するかに依存する。したがって、図3aによれば、線34は、現在の測定値12−nと前の測定値12−(n−1)とを通る。線34は、角度αで線32に交差する。線32と線34との間の角度αが、小さければ小さいほど、すなわち、前の測定値12−(n−2),12−(n−1)によって予測されたルートからの現在の測定値12−nの逸脱が、小さければ小さいほど、前の測定値12−(n−2),12−(n−1)と同様に、現在の測定値12−nが、少なくとも区域的に線で形取られた第1の地図対象物14−1に割り当てられるという確率が、より高くなる。ここでは、単に例示的に、2つの隣接測定値12−(n−2),12−(n−1)だけが考えられる。隣接値のより大きな数は、設計パラメータであり、したがって、また、可能である。
【0032】
これは、中間角度α、または、線32からの逸脱が、小さければ小さいほど、第1の割り当て確率P1,1が、より高くなることを意味する。これは、例示的確率関数(p関数)または確率密度関数36によって図式的に示される。第1の割り当て確率P1,1は、中間角度αに対して直接に、(ここに示されているように)記入される。その結果、第1の割り当て確率P1,1の値が、直接、読まれる。確率密度関数の場合、第1の割り当て確率P1,1は、可能な範囲の角度を横切って確率密度を統合することによって生じる。中間角度αの決定は、連続した測定値12−(n−2),12−(n−1),12−nの座標が互いに異なること、すなわち、連続した測定値12−(n−2),12−(n−1),12−nが連続した動きを反映することを、明らかに要求する。中間角度αの決定のために、互いに所定の最小距離を有している連続した測定値だけが、使用されるべきである。そうでなければ、信じがたい結果が生じる。したがって、実施形態によれば、動きの静止、または、現在の測定値の割り当てに関して、あまりにも遅い動きを検出するための準備が成される。そして、第1の割り当て確率P1,1の決定のために、類似の連続した測定値をそれぞれ無視するための準備が成される。または、類似の連続した測定値をそれぞれ考えるための準備が成される。
【0033】
図3aに示された確率関数36は、以下の確率関数と同様に、単に例示に過ぎず、したがって、明らかに異なるコースを取ることができることに注目するべきである。確率関数は、個々の割り当て確率がどのように形成されるかを、質的な方法で単に描くことである。
【0034】
処理装置22は、さらに、現在の測定価値の12−nに対して、第1の地図対象物14−1に関する第2の割り当て確率P1,2を決定するように構成される。第2の割り当て確率P1,2は、現在の測定値12−nが、第1の地図対象物14−1からどの位遠くに離れているかに依存する。そのため、距離d2は、現在の測定値12−nの正投影、すなわち、線で形取られた第1の地図対象物14−1に対する座標によって実行される。地図対象物に映し出された測定値と現在の測定値12−nとの間の距離d2は、現在の測定値12−nと第1の地図対象物14−1との間の暗示距離を表す。例えば、距離d2が、地理的な経度および緯度仕様を使用することによって決定されるか、または、デカルト座標の手段によって決定されるかどうかは、重要ではない。
【0035】
第2の割り当て確率P1,2に関する可能確率関数37は、図3bに例示的に示されている。基本的に、第2の割り当て確率P1,2が高ければ高いほど、現在の測定値12−nは、最後の測定値が割り当てられた第1の地図対象物(道路)14−1に近いことが認められる。ここで、実際に使用された確率(密度)関数は、再び異なる。
【0036】
第1の確率測度P1は、さらに、第3の割り当て確率P1,3を含むことによって、決定される。そのため、処理装置22は、現在の測定値12−nに対して、第1の地図対象物14−1に関して第3の割り当て確率P1,3を決定するように構成される。その結果、第3の割り当て確率P1,3は、現在の測定値12−nが、第1の地図対象物14−1と第2の地図対象物14−2との交差点18からどの位遠くに離れているかに依存する。この距離は、以下、距離d3と称される。したがって、例えば、距離d3は、次の可能な街路の角までの距離を意味する。現在の測定値12−nまたはその割り当てられた地理的位置が、交差点18から遠ければ遠いほど、現在の測定値12−nが第2の地図対象物14−2に割り当てられることは、より一層ありそうもない。逆もまた同様である。これは、距離d3が大きければ大きいほど、現在の測定値12−nが第1の地図対象物14−1に割り当てられることは、より一層ありそうなことである、ことを意味する。この相関関係は、明らかに異なる図3cに示した確率関数38に基づいて例示的に示される。
【0037】
3つの割り当て確率P1,1,P1,2,P1,3から、第1の確率測度P1は、例えば、P1=f(P1,1,P1,2,P1,3)=P1,1・P1,2・P1,3に従って決定される。それぞれの割り当て確率P1,1,P1,2,P1,3が、0と1との間にあるので、第1の確率測度P1も、0と1との間にある(0≦P1≦1)。動きの静止を検出した場合、すなわち、現在の測定点が、前の測定と非常に似ている、または、等しい場合(例えば、P1,1=1)、(中間角度αは信頼性良く決定できないので、)この場合に信頼性のない第1の割り当て確率P1,1を無視することが選択される。
【0038】
第1の確率測度P1が決定されるとき、第1の確率測度P1は、第1の閾値X1と比較される。仮に、第1の確率測度P1が、第1の閾値X1を超えている(例えば、X1≦P1)ならば、現在の測定値12−nは、第1の地図対象物14−1に割り当てられる。これは、例えば、線で形取られた第1の地図対象物14−1への測定座標の正投影によっても実行できる。明らかに、他の地図規則も可能である。
【0039】
仮に、第1の確率測度P1が、第1の閾値X1未満である(例えば、P1≦X1)ならば、現在の測定値12−nは、第1の地図対象物14−1ではなく、第2の地図対象物14−2に割り当てられるべきであると想定されなければならない。この場合、例えば、第1の道路から第2の道路(第1の道路に交差している道路)への道路変更が実行される。
【0040】
第2の地図対象物14−2への現在の測定値12−nの割り当てが、確率として、どのようにして保護されるかが、図5および図6に基づいて説明される前に、第1の確率測度P1を決定するための規則が、図4に基づいて、以下に纏められる。
【0041】
ステップ40では、第1の確率測度P1が決定される。第1の確率測度P1は、現在の測定値12−nが、第1の、少なくとも区域的に線で形取られた地図対象物14−1に割り当てられるかどうかを示す。一連の隣接測定値のうち、少なくとも1つの隣接測定値は、事前に、既に、地図対象物14−1に割り当てられている。既に上で議論したように、ステップ40は、3つの副ステップに分割される。
【0042】
第1の副ステップ41では、第1の割り当て確率P1,1は、上で説明したように決定される。その後の副ステップ42,43では、さらに、第2および第3の割り当て確率P1,2,P1,3が、既に説明したように決定される。
【0043】
次のステップ44では、3つの割り当て確率P1,1,P1,2,P1,3を含む第1の確率測度P1が、第1の閾値X1と比較される。
【0044】
仮に、ステップ44の比較が、第1の確率測度P1が第1の閾値X1より高いという結果を生ずるならば、現在の測定値12−nは、例えば、現在の道路に、すなわち、ステップ45における第1の線で形取られた地図対象物14−1に割り当てられる。
【0045】
しかしながら、仮に、ステップ44の比較が、第1の確率測度P1が十分高くないという結果を生ずるならば、現在の測定値12−nは、第1の地図対象物14−1に属さない。そして、ステップ46で、現在の測定値12−nが、第2の地図目的14−2に割り当てられるかどうかが、チェックされる。これは、第2の確率測度P2を決定することによって実行される。第2の確率測度P2は、以下で、さらに詳細に議論される。
【0046】
図5aは、図3aと等しい、一連の隣接測定点12−(n−2),12−(n−1),12−nを示す。
【0047】
第2の地図対象物14−2に関する第4の割り当て確率P2,1は、線34と、少なくとも区域的に線で形取られた第2の地図対象物14−2)と、の間の中間角度βに依存するように作られる。この中間角度βが、小さければ小さいほど、地図対象物14−2と線34とは、より「平行」になり、そして、現在の測定点12−nを第2の地図対象物14−2に割り当てることに関して、第4の割り当て確率P2,1は高くなる。この相関関係は、確率関数52bによって例示的に示される。
【0048】
さらに、処理装置22は、現在の測定値12−nに対して、第2の地図対象物14−2に関する第5の割り当て確率P2,2を決定するように構成される。第5の割り当て確率P2,2は、例えば、現在の測定値12−nが、第1の地図対象物14−1からどの位遠くに離れているか(距離d1)、に依存する。特に、第1の地図対象物14−1が、現在の測定値12−nからの興味がある半径内で、唯一、少なくとも区域的に線で形取られた第2の地図対象物14−2によって切られるとき、第5の割り当て確率P2,2は、この様にして決定される。しかしながら、数個の可能な少なくとも区域的に線で形取られた第2の地図対象物14−2に対して、この手順は役に立つ情報を提供しない。議論した第5の割り当て確率P2,2に導く確率関数54aは、図5bに図式的に示されている。確率関数54aから、第5の割り当て確率P2,2が、高ければ高いほど、第1の地図対象物14−1から現在の測定値12−nまでの距離d1は、より大きくなる、ということは明白となる。
【0049】
好ましい実施形態によれば、処理装置22は、現在の測定値12−nに対して、第2の地図対象物14−2に関する第5の割り当て確率P2,2を決定するように構成される。第5の割り当て確率P2,2は、現在の測定値12−nが、第2の地図対象物14−2からどの位遠くに離れているか(距離d2)、に依存する。上で説明した代替手段に関して、これは、数個の可能な少なくとも区域的に線で形取られた第2の地図対象物14−2に、特に有利である。対応して、第5の割り当て確率P2,2(符号54bを参照)が高ければ高いほど、第2の地図対象物14−2から現在の測定値12−nまでの距離d2が、より小さくなる。第5の割り当て確率P2,2を決定するための上で説明した2つの方法の組み合わせも、明らかに可能である。その結果、第5の割り当て確率P2,2は、距離d1に正比例し、同時に、距離d2に反比例している。
【0050】
本実施形態によれば、第2の確率測度P2は、第4および第5の割り当て確率、すなわち、P2=f(P2,1,P2,2)に基づいて決定される。特に、第2の確率測度P2は、P2=P2,1・P2,2に従って決定される。
【0051】
第1の地図対象物14−1の形式の道路は、一般に、(第2の地図対象物14−2の形式の)交差道路を1つだけ有するものではなく、多数の交差道路を有するので、第2の確率測度P2は、現在の道路に交差するそれぞれの可能な道路ごとに決定される。可能な交差道路、すなわち、第2の地図対象物は、期待されるべき現在の測定点の測定精度に依存して、現在の測定点12−1の周囲の予め決められた地理的半径内で決定される。K個の第2の地図対象物14−2が可能である場合、K個の第2の確率測度P2k(k=1,・・・,K)が、それぞれ、K個の第2の地図対象物14−2ごとに決定される。本実施形態によれば、最もありそうな第2の地図対象物14−2は、K個の第2の確率測度P2k(k=1,・・・,K)を横切る最大値構成から生じる。これは、maxP2=P2k=max(P21,・・・,P2k)が適用されるk番目の第2の地図対象物14−2が、選択されることを意味する。
【0052】
仮に、選択された第2の確率測度maxP2が、第2の閾値X2より高ければ、現在の測定値12−nは、maxP2に属する選択された第2の地図対象物14−2に割り当てられるべきであると想定される。しかしながら、仮に、選択された第2の確率測度maxP2が、第2の閾値X2より低いならば、第1の確率測度P1は、現在の測定値12−nのために、再び考慮される。仮に、第1の確率測度P1が第3の閾値X3(第3の閾値X2は、第1の閾値X1より低い)より高いならば、現在の測定値12−nは、そのまま、第1の地図対象物14−1に割り当てられる。しかしながら、仮に、第1の確率測度P1が第3の閾値X3より低いならば、最後の測定値12−(n−1),12−(n−2)の割り当ての間に、何かが既に「支障をきたした」と想定される。この場合、現在の測定値12−nの配置または割り当てが、再び実行されなければならない。
【0053】
これが議論される前に、第2の確率測度P2の決定が、図6に基づいて纏められる。
【0054】
図6は、第2の確率測度P2を決定するステップ60を示す。仮に、第1の確率測度P1が、現在の測定値12−nを第1の地図対象物14−1へ割り当てることがありそうもないことを指示するならば、第2の確率測度P2は、現在の測定値12−nが、少なくとも区域的に線で形取られた第2の地図対象物14−2に割り当てられるかどうかを指示する。第2の地図対象物14−2は、第1の地図対象物14−1と交差点18を有する。
【0055】
上で説明したように、ステップ60は、循環経路によって示されるように、複数の可能な第2の地図対象物ごとに実行される。さらに、ステップ60は、副ステップ61,62,63に分割される。第1の副ステップ61では、第1の割り当て確率P2,1kが、それぞれの可能な第2の地図対象物ごとに決定される。第2の副ステップ62では、第5の割り当て確率P2,2kが決定される。
【0056】
第4および第5の割り当て確率P2,1k,P2,2kから、第2の確率測度P2kが、第3の副ステップ63で計算される。副ステップ61,62,63は、言及したように、それぞれの可能な第2の地図対象物k(k=1,・・・,K)ごとに実行される。その結果、K個の第2の確率測度が、最大値構成のためにステップ64に供給される。仮に、最大確率測度maxP2が決定されるならば、最大確率測度maxP2は、ステップ65で第2の閾値X2と比較される。仮に、最大確率測度maxP2が第2の閾値X2を超えるならば、現在の測定値12−nは、ステップ66で、最大確率測度maxP2が属する第2の地図対象物14−2に割り当てられる。
【0057】
しかしながら、仮に、最大確率測度maxP2が第2の閾値X2未満ならば、第1の確率測度P1の考慮が、現在の測定価値の12−nに対して、再び実行される。第1の確率測度P1は、ステップ67で、第3の閾値X3(<X1)と比較される。仮に、このステップ67の比較で、第1の確率測度P1が第3の閾値X3を超えているという結果を生じるならば、現在の測定値12−nは、ステップ68で、第1の地図対象物14−1に割り当てられる。
【0058】
仮に、ステップ67の比較が、第1の確率測度P1が第3の閾値X3未満であるという結果を生じるならば、虚偽の陳述が、最後の測定値12−(n−1),12−(n−2)の割り当ての間に作られた、という確率が高い。この場合、ステップ69の再割り当てが、現在の測定値12−nに対して行われる。この再割り当ては、以下で説明される。
【0059】
再割り当てのオプションは、図7に模式的に示される。
【0060】
現在の測定値(測定点)12−nに対して、付近検索が実行される。このため、地図対象物(例えば、道路)が、現在の測定値12−nの周囲の予め定義された地理的付近72内で検索される。このため、現在の測定値12−nは、それぞれの道路(例えば、付近72の全ての道路)までの距離を見つけるために、それぞれの道路に正投影法で写像される。現在の測定値12−nまでの距離が最も短い道路が、地図対象物として選択され、現在の測定値12−nが、選択された地図対象物に割り当てられる。
【0061】
次に、現在の測定値12−nの再割り当てに対しては、確率測度が、第2の確率測度P2に対応して決定される。第2の確率測度P2の計算は、図5a、5bおよび6に基づいて既に議論されている。これは、測定値12−n,12−(n−1)を通る線34が、再割り当てされるべき区域的に線で形取られた地図対象物14−2に関連することを意味する。現在の測定値12−nは、地図対象物14−2までの距離が最も短い。その中で、測定値12−n,12−(n−1)を通る線34と再割り当てされるべき地図対象物14−2との間の中間角度βが、考えられる。この中間角度βが小さければ小さいほど、再割り当てされた地図対象物に、現在の測定点12−nの正しい割り当てをすることに関して、再割り当てされるべき地図対象物14−2と線34とが、より平行であり、そして、割り当て確率P2,1が、より高い。上で既に説明したように、再割り当てされた地図対象物に関する割り当て確率P2,2は、現在の測定値12−nに対して決定される。割り当て確率P2,2は、現在の測定値12−nが、再割り当てされるべき地図対象物14−2から、どの位遠くに離れているかに依存する。本実施形態によれば、再割り当てのための確率測度P2は、割り当て確率P2,1および割り当て確率P2,2に基づいて、すなわち、P2=f(P2,1,P2,2)に基づいて決定される。特に、再割り当てのための確率測度P2は、P2=P2,1・P2,2に従って決定される。
【0062】
ここで提示された概念は、例えば、リアルタイム(実際にはリアルタイム)でナビゲーションする場合と、後で地理的基準データ(地図データ)に沿って運転する、または、歩くルートを照合する場合との両方に使用できる。このように、本実施形態は、どのルートが都市やビルなどを通って取られるか、を表示できる。
【0063】
また、本実施形態は、WLAN規格に基づいた位置決めまたはナビゲーションシステムのために使用されるべき基準データを改良のためにも適用される。始めに、地理的基準位置ためのHF指紋を有する基準測定パケットの形式の基準データが、WLAN規格に基づいたナビゲーションシステムのために決定されなければならないことは、既に説明されている。ここで考慮するWLAN規格に基づいた位置決めシステムは、基本的方法として、受信信号強度(RSS)指紋を使用する。この方法は、現在の位置で受信する、または、受信できる、いくつかの放送局の無線信号の信号強度が、現在の位置を明白に特徴付けるという想定に基づいている。仮に、基準データベースが、多数の基準位置、基準点で受信する(または、受信できる)放送局の送信機識別、および、対応する無線信号の信号強度を含みながら、存在するならば、現在の位置が、現在測定された測定値とデータベースの基準値との照合によって、1連の現在の測定値(送信機識別と関連信号強度値)から推論できる。この照合は、全ての基準点ごとに、その前に記録された測定値または基準値が、現在の位置の現在の測定値と、どの位類似しているかを評価する。次に、最も類似の基準点が、携帯端末装置の現在の位置の期待値の基礎として使用される。
【0064】
基準測定時に基準位置で受信できる無線送信機の信号強度は、基準データベースごとに、基準測定によって実験的に決定される。結果は、基準測定が実行された全ての基準位置に対して、それぞれの関連受信電磁界強度と品質とを含んでいる無線送信機(アクセス点)のリストを含むデータベースである。このリストは、基準パケットとも称される。WLAN構成で、そのような基準データベースは、以下のパラメータを例示的に含む。
【0065】
【表1】
【0066】
【表2】
【0067】
【表3】
【0068】
表1、表2、表3において、「RID」は基準位置識別を表し、「MAC」は受信された放送局のアドレスを表す。「RSSI(Received Signal Strength Indicator)」は、無線送信機の受信電磁界強度を表し、例えば表1中の数字46530は、−46.530dBmを意味する。「X」、「Y」、「Z」は、デカルト座標の基準位置を表し、例えば、表3の「X」中の数字24583は、245.83mを意味する。「CREATED」は、測定値を取った時間を表す。
【0069】
「PGS(%)」は、測定値を取るとき、この放送局が、割合ベースで、どの位の頻度で見られたかを示す。すなわち、PGS=90(%)は、放送局が、平均10回の測定のうち9回で測定されたことを意味する。
【0070】
上で示した表において、基準位置識別(RID)に関連した全ての情報が、基準測定パケットに対応している。これは、上の例示的表が、3つの異なる地理的基準位置に対応する3つの基準測定パケットを含むことを意味する。
【0071】
位置決めしているとき、現在受信された無線送信機が、照合段階で、基準データベースからの基準パケットと比較される。無線送信機は、それぞれの関連受信電磁界強度(測定パケット)を含む。現在の測定パケットまでの距離がより短い基準パケットが、すなわち、多数の共通無線送信機とわずかに異なって受信された電磁界強度が、現在の測定パケットに良く合致する。良く合致した基準パケットに属する基準位置は、非常にありえそうであり、位置を計算する段階で考慮される。位置計算段階は、基準位置から、携帯端末装置の位置を計算する。携帯端末装置の位置の期待値は、位置計算段階の結果である。期待値の品質は、特に、基準パケット(特に基準位置)の品質に依存する。
【0072】
基準位置は、例えば、GPS受信機によって決定される。説明したように、そのようなGPS受信機は限られた程度の精度しかない。次に、説明された概念によって、保存された測定パケットの記録された基準位置が、修正され、地図対象物に割り当てられる。その結果、データベースに保存された基準位置の精度が、大きく向上する。
【0073】
したがって、本実施形態は、地理的基準位置の測定座標と、測定座標に割り当てられた基準測定パケットと、を有する基準データを改良するための概念を提供する。基準測定パケットは、地理的基準位置で決定された基準送信機識別と、基準時に基準位置で受信できる無線送信機の電磁界信号特性を有する。したがって、地理的基準位置の実際の座標に不正確に対応する測定座標は、測定座標の付近内にある地理的地図の地図対象物の座標に照合され、測定座標より地理的基準位置の実際の座標に良く対応する改良座標を得る。その後、改良座標は、基準測定パケットに割り当てられる。
【0074】
これに関して、図8は、データベース84に結合した処理装置82を示す。処理装置82は、データベース84から、基準測定パケット、特に、地理的基準位置の座標(x,y,z)を受信できる。
【0075】
したがって、処理装置82は、上で説明した処理装置22を含む。処理装置22は、地理的基準位置の座標に不正確に対応する測定座標(x,y,z)を、測定座標の付近内にある地理的地図の地図対象物14の座標に照合し、測定座標より地理的基準位置の実際の座標に良く対応する改良座標(x´,y´,z´)を得るように調整される。さらに、処理装置22は、改良座標(x´,y´,z´)を基準測定パケットに割り当てる、または、測定座標(x,y,z)を改良座標(x´,y´,z´)に置き換えるように調整される。
【0076】
地図対象物に対応するデジタル地図データは、例えば、地図データベース86から得られる。このため、図8に示されるように、処理装置82は地図データベース86に結合される。
【0077】
測定座標(x,y,z)の付近内の地図対象物は、例えば、測定座標(x,y,z)の周囲の付近検索によって決定される。明らかに、付近の半径は、それぞれの応用と測定精度とに依存し、例えば、100m未満(特に30m未満)である。
【0078】
無線信号の電磁界特性は、無線信号の受信電磁界強度、受信パワースペクトル、信号対雑音比(SN比)、入射角、伝播時間、分極または位相位置などに関連した信号特性である。基準送信機識別は、例えば、基準位置で受信できる無線送信機のMACアドレスから成る。
【0079】
したがって、割り当てられた基準測定パケット(すなわち、受信できるWLAN送信機の放送指紋)が記録されている基準位置は、比較的不正確な方法で測定される。例えば、測定は、どんなルートに沿った運転または徒歩でも、これらのルートに沿った間隔で測定パケットを記録することによって行われる。例えば、測定パケットは、応用によって、2〜30秒ごとに記録され、データベース84に保存される。運転または徒歩のために、例えば、プロの運転手(例えば、タクシー運転手、バス運転手など)、郵便配達人またはバイク便運転者のために使用される。すなわち、特定の領域内を、毎日、とにかく移動している人々のために、基準データは記録されるべきである。これは、基準データベース84の比較的単純で費用対効果に優れた発生を許容する。
【0080】
次に、処理装置82は、提供された方法を使用して、後工程(地図照合工程)によって、測定基準位置を、運転または徒歩したルートに対応する高精度な地図データに照合できる。このため、処理装置82は、基準測定パケットが測定基準位置と共に保存されるデータベース84へのアクセスだけを必要とする。また、それぞれの高精度な地図の材料へのアクセスは、その後の地図照合を行うことができるように要求される。このため、地図データは、適切な地図データベース86から検索される。このため、処理装置82は、地図データを外部のデータベース86から検索するためのインターネットインタフェースのような、適切なインタフェースを持つことができる。基準データベース84は、そのようなインタフェースによって、処理装置82に結合可能である。
【0081】
インタフェースを介して、データベース84に保存された測定パケットの基準位置の測定座標(x,y,z)が受信される。受信された座標に基づいて、測定座標(x,y,z)が位置している地理的領域に関して、評価が成される。これは、処理装置82が、処理装置82に結合された測定座標(x,y,z)に基づいた地図データベース86から、地理的地図の材料を要求することを可能にする。そのような地図データベース86は、多数回かつ頻繁に、無料で利用可能である。(デジタル)地図データベース86の地図データは、道路、経路またはビルなどのような地図対象物の高精度な地理的座標を含む。そのため、本発明の概念によって、ここで説明された地図照合によって、測定座標(x,y,z)を高精度な地図データに照合することは、可能である。この高精度な地図データを有する測定座標(x,y,z)の照合は、基準測定パケットの全ての測定位置ごとに実行される。地図照合が実行された後、基準位置の改良座標(x´,y´,z´)は、データベース84に書き戻される。好ましくは、基準測定パケットの古い測定座標(x,y,z)は、新しい改良座標(x´,y´,z´)に置き換えられる。
【0082】
したがって、本実施形態は、WLAN規格に基づいた位置決めシステムなどのような、指紋に基づいた位置決めシステムのための高精度な基準データベースを供給することを助ける。したがって、補正プロセスの位置精度は、高精度である必要はない。その結果、複雑で高価なGPS受信装置は必要でない。測定基準位置の精度は、測定位置を高精度な地図データに照合することによって、次の後工程で得られる。したがって、本実施形態は、測定された地理的位置が、WLAN規格に基づいた位置決めまたはナビゲーション装置のための基準位置として使用される、という後工程のオプションを提供する。説明した後工程によって、測定地理的位置の品質は、大きく改良され、したがって、WLAN規格に基づいたシステムにおける放送指紋照合によって得られた位置情報の品質も、大きく改良される。そこでは、最終的に、現在決定された放送指紋が、基準位置での保存された放送指紋と比較される。そして、それに基づいて、現在の地理的位置の期待値が、基準位置の助けで決定される。
【0083】
最後に、本発明に係る方法は、環境によって、ハードウェアまたはソフトウェアの中で実現されることに注目するべきである。実現は、電子的に読み込み可能な制御信号を有するデジタル記憶媒体、特に、ディスク、CDまたはDVDで成される。デジタル記憶媒体は、発明の方法が実行されるように、プログラム可能コンピュータシステムと協働する。したがって、一般に、コンピュータプログラム製品がコンピュータ、および/または、マイクロコントローラ上で稼動するとき、本発明は、発明の方法を実行するための機械読取可能な担持体に、プログラムコードを保存するコンピュータプログラム製品から成る。言い換えれば、本発明は、コンピュータプログラムが、コンピュータ、および/または、マイクロコントローラ上で稼動するとき、現在の測定値を割り当てるための方法を実行するためのプログラムコードを有しているコンピュータプログラムとして実現される。
【特許請求の範囲】
【請求項1】
地理的位置の現在の測定値(12−n)を、地理的地図(10)の地図対象物(14)に割り当てるための装置(20)であって、
前記現在の測定値(12−n)が、第1の地図対象物(14−1)に割り当てられるかどうかを指示する、第1の確率測度(P1)を決定し、かつ、仮に、前記第1の確率測度(P1)が、前記現在の測定値(12−n)を、前記第1の地図対象物(14−1)に割り当てることがありそうもないことを示すならば、前記現在の測定値(12−n)が、第2の地図対象物(14−2)に割り当てられるかどうかを指示する、第2の確率測度(P2)を決定するための処理装置(22)を備え、
前記現在の測定値(12−n)は、隣接地理的位置の一連の隣接測定値から発生し、
前記一連の隣接測定値のうち、少なくとも1つの隣接測定値(12−(n−1);12−(n−2))は、事前に既に、前記第1の地図対象物(14−1)に割り当てられ、
前記第2の地図対象物(14−2)は、前記第1の地図対象物(14−1)との交差点(18)を有していること、
を特徴とする、装置。
【請求項2】
前記処理装置(22)は、前記現在の測定値(12−n)のために、前記第1の地図対象物(14−1)に関する第1の割り当て確率(P1,1)を決定するように構成され、
前記第1の割り当て確率(P1,1)は、前記現在の測定値(12−n)が、少なくとも2つの前の測定値(12−(n−1);12−(n−2))によって定義された線(32)から、どの位大きく逸脱しているかに依存していること、
を特徴とする、請求項1に記載の装置。
【請求項3】
前記第1の割り当て確率(P1,1)が低ければ低いほど、前記線(32)からの前記現在の測定値(12−n)の逸脱(α)が、より大きいこと、を特徴とする、請求項2に記載の装置。
【請求項4】
前記処理装置(22)は、前記現在の測定値(12−n)のために、前記第1の地図対象物(14−1)に関する第2の割り当て確率(P1,2)を決定するように構成され、
前記第2の割り当て確率(P1,2)は、前記現在の測定値(12−n)が、前記第1の地図対象物(14−1)から、どの位遠くに離れているかに依存していること、
を特徴とする、請求項1〜請求項3のいずれかに記載の装置。
【請求項5】
前記第2の割り当て確率(P1,2)が低ければ低いほど、前記第1の地図対象物(14−1)から前記現在の測定値(12−n)までの距離(d2)が、より長いこと、を特徴とする、請求項4に記載の装置。
【請求項6】
前記処理装置(22)は、前記現在の測定値(12−n)のために、前記第1の地図対象物(14−1)に関する第3の割り当て確率(P1,3)を決定するように構成され、
前記第3の割り当て確率(P1,3)は、前記現在の測定値(12−n)が、前記第1の地図対象物(14−1)と前記第2の地図対象物(14−2)との交差点(18)から、どの位遠くに離れているかに依存していること、
を特徴とする、請求項1〜請求項5のいずれかに記載の装置。
【請求項7】
前記第3の割り当て確率(P1,3)が高ければ高いほど、前記現在の測定値(12−n)から前記交差点(18)までの距離(d3)が、より長いこと、を特徴とする、請求項6に記載の装置。
【請求項8】
前記処理装置(22)は、前記第1の割り当て確率(P1,1)、前記第2の割り当て確率(P1,2)、および/または、前記第3の割り当て確率(P1,3)の少なくともいずれか1つに基づいた前記第1の確率測度(P1)を決定するように構成されていること、を特徴とする、請求項1〜請求項7のいずれかに記載の装置。
【請求項9】
前記処理装置(22)は、前記第1の割り当て確率(P1,1)、前記第2の割り当て確率(P1,2)、および、前記第3の割り当て確率(P1,3)に基づいた前記第1の確率測度(P1)を決定するように構成されていること、を特徴とする、請求項8に記載の装置。
【請求項10】
前記処理装置(22)は、前記現在の測定値(12−n)のために、前記第2の地図対象物(14−2)に関する第4の割り当て確率(P2,1)を決定するように構成され、
前記第4の割り当て確率(P2,1)は、前記第2の地図対象物(14−2)と、前記第1の地図対象物(14−1)に割り当てられた最後の測定値(12−(n−1))と前記現在の測定値(12−n)とで形成された線(34)と、によって形成された角度が、どの位大きいかに依存していること、
を特徴とする、請求項1〜請求項9のいずれかに記載の装置。
【請求項11】
前記第4の割り当て確率(P2,1)が高ければ高いほど、前記角度が、より小さいこと、を特徴とする、請求項10に記載の装置。
【請求項12】
前記処理装置(22)は、前記現在の測定値(12−n)のために、前記第2の地図対象物(14−2)に関する第5の割り当て確率(P2,2)を決定するように構成され、
前記第5の割り当て確率(P2,2)は、前記現在の測定値(12−n)が、前記第2の地図対象物(14−2)から、どの位遠くに離れているかに依存していること、
を特徴とする、請求項1〜請求項11のいずれかに記載の装置。
【請求項13】
前記第5の割り当て確率(P2,2)が高ければ高いほど、前記第2の地図対象物(14−2)から前記現在の測定値(12−n)までの距離が、より短いこと、を特徴とする、請求項12に記載の装置。
【請求項14】
前記処理装置(22)は、前記第4の割り当て確率(P2,1)、および/または、前記第5の割り当て確率(P2,2)の少なくともいずれか1つに基づいた前記第2の確率測度(P2)を決定するように構成されていること、を特徴とする、請求項10〜請求項13のいずれかに記載の装置。
【請求項15】
前記処理装置(22)は、前記第4の割り当て確率(P2,1)および前記第5の割り当て確率(P2,2)に基づいた前記第2の確率測度(P2)を決定するように構成されていること、を特徴とする、請求項14に記載の装置。
【請求項16】
複数の前記第2の地図対象物(14−2)が存在し、それぞれの前記第2の地図対象物(14−2)が、前記第1の地図対象物(14−1)との交差点を有し、かつ、前記現在の測定値(12−n)の予め定義された付近(72)内を通り、
前記処理装置(22)は、複数の前記第2の地図対象物(14−2)ごとに、前記第2の確率測度(P2)に対応する確率測度(P2k)を決定し、このようにして決定された前記確率測度(P2k)から、最も高い確率(maxP2)に対応する前記確率測度(P2k)を選択するように構成されていること、
を特徴とする、請求項1〜請求項15のいずれかに記載の装置。
【請求項17】
前記処理装置(22)は、前記最も高い確率(maxP2)が予め決定された値(X2)を超えるとき、前記最も高い確率(maxP2)に対応する前記第2の地図対象物(14−2)を、前記現在の測定点(12−n)に割り当てるように構成されていること、を特徴とする、請求項16に記載の装置。
【請求項18】
前記処理装置(22)は、前記最も高い確率(maxP2)が予め決定された値(X2)未満であるとき、前記最も高い確率(maxP2)に対応する前記第2の地図対象物(14−2)に基づいた前記第1の確率測度(P1)を決定するように構成されていること、を特徴とする、請求項16に記載の装置。
【請求項19】
仮に、前記第2の地図対象物(14−2)に基づいた前記第1の確率測度(P1)が、予め決定された値(X3)未満であるならば、前記現在の測定点(12−n)の予め定義された地理的付近(72)内の別の地図対象物(79)を選択して、前記別の地図対象物(79)を前記処理装置(22)を供給するように構成されていること、を特徴とする、請求項18に記載の装置。
【請求項20】
前記処理装置(22)は、前記別の地図対象物(79)に関する割り当て確率(P2)に基づいた前記別の地図対象物(79)を決定するように構成され、
前記割り当て確率(P2)は、前記現在の測定値(12−n)が、前記別の地図対象物(79)から、どの位遠くに離れているか、そして、前記別の地図対象物(14−2)と、最後に割り当てられた測定値(12−(n−1))と前記現在の測定値(12−n)とによって形成された線(34)と、によって形成された角度が、どの位大きいか、に依存していること、
を特徴とする、請求項19に記載の装置。
【請求項21】
前記地図対象物(14;79)は、少なくとも区域的に線で形取られた地図対象物であること、を特徴とする、請求項1〜請求項20のいずれかに記載の装置。
【請求項22】
前記地図対象物(14;79)は、道路もしくは経路を表していること、を特徴とする、請求項1〜請求項21のいずれかに記載の装置。
【請求項23】
地理的基準位置の測定座標と前記地理的基準位置に割り当てられた基準測定パケットとを含む基準データを、改良するための装置であって、
地理的地図の地図対象物の座標に、前記地理的基準位置の実際の座標に近似する前記測定座標を照合して、前記測定座標より前記地理的基準位置の前記実際の座標に良く対応する改良座標を得て、そして、前記改良座標を、前記基準測定パケットに割り当てるための処理装置(82)を備え、
前記基準測定パケットは、前記地理的基準位置で決定された基準送信機識別と、基準時に前記基準位置で受信できる無線送信機の電磁界信号特性と、を含むこと、
を特徴とする、装置。
【請求項24】
前記電磁界信号特性は、受信電磁界強度に関連した無線信号の信号特性であること、を特徴とする、請求項23に記載の装置。
【請求項25】
前記電磁界信号特性は、RSSI値、受信電力スペクトル、もしくは、信号対雑音比であること、を特徴とする、請求項24に記載の装置。
【請求項26】
前記処理装置(82)は、基準測定パケットにおいて、地理的な基準位置の測定座標を、改良された座標に置き換えるように構成されていること、を特徴とする、請求項24または請求項25に記載の装置。
【請求項27】
前記地図対象物(14;79)の前記座標は、前記地図対象物(14;79)に割り当てられた風景物の実際の座標に対応していること、を特徴とする、請求項23〜請求項26のいずれかに記載の装置。
【請求項28】
前記地図対象物(14;79)は、道路、経路、もしくは、ビルを表すこと、を特徴とする、請求項23〜請求項27のいずれかに記載の装置。
【請求項29】
地理的位置の現在の測定値(12−n)を、地理的地図の地図対象物(14)に割り当てるための方法であって、
前記現在の測定値(12−n)が、少なくとも区域的に線で形取られた第1の地図対象物(14−1)に割り当てられるかどうかを指示する、第1の確率測度(P1)を決定するステップと、
仮に、前記第1の確率測度(P1)が、前記現在の測定値(12−n)を、前記第1の地図対象物(14−1)に割り当てることがありそうもないことを示すならば、前記現在の測定値(12−n)が、少なくとも区域的に線で形取られた第2の地図対象物(14−2)に割り当てられるかどうかを指示する、第2の確率測度(P2)を決定するステップと、を備え、
前記現在の測定値(12−n)は、隣接地理的位置の一連の隣接測定値から発生し、
前記一連の隣接測定値のうち少なくとも1つの隣接測定値は、事前に既に、前記地図対象物(14−1)に割り当てられ、
前記第2の地図対象物(14−2)は、前記第1の地図対象物(14−1)との交差点(18)を有していること、
を特徴とする、装置。
【請求項30】
地理的基準位置の測定座標と前記地理的基準位置に割り当てられた基準測定パケットとを含む基準データを、改良するための方法であって、
地理的地図の地図対象物の座標に、前記地理的基準位置の実際の座標に近似する前記測定座標を照合して、前記測定座標より前記地理的基準位置の前記実際の座標に良く対応する改良座標を得る照合ステップと、
前記改良座標を、前記基準測定パケットに割り当てるステップと、を備え、
前記基準測定パケットは、前記地理的基準位置で決定された基準送信機識別と、基準時に前記基準位置で受信できる無線送信機の電磁界信号特性と、を含むこと、
を特徴とする、方法。
【請求項31】
前記照合ステップは、
前記測定座標が、少なくとも区域的に線で形取られた第1の地図対象物(14−1)に割り当てられるかどうかを指示する、第1の確率測度(P1)を決定するステップと、
仮に、前記第1の確率測度(P1)が、前記地理的基準位置の前記測定座標を、前記第1の地図対象物(14−1)に割り当てることがありそうもないことを示すならば、前記測定座標が、少なくとも区域的に線で形取られた第2の地図対象物(14−2)に割り当てられるかどうかを指示する、第2の確率測度(P2)を決定するステップと、を備え、
一連の隣接測定座標のうち少なくとも1つの隣接測定座標は、事前に既に、前記地図対象物(14−1)に割り当てられ、
前記第2の地図対象物(14−2)は、前記第1の地図対象物(14−1)との交差点(18)を有していること、
を特徴とする、請求項30に記載の方法。
【請求項32】
コンピュータもしくはマイクロコントローラが稼動するとき、請求項29〜請求項31のいずれかに記載の方法がを実行されること、を特徴とする、コンピュータプログラム。
【請求項1】
地理的位置の現在の測定値(12−n)を、地理的地図(10)の地図対象物(14)に割り当てるための装置(20)であって、
前記現在の測定値(12−n)が、第1の地図対象物(14−1)に割り当てられるかどうかを指示する、第1の確率測度(P1)を決定し、かつ、仮に、前記第1の確率測度(P1)が、前記現在の測定値(12−n)を、前記第1の地図対象物(14−1)に割り当てることがありそうもないことを示すならば、前記現在の測定値(12−n)が、第2の地図対象物(14−2)に割り当てられるかどうかを指示する、第2の確率測度(P2)を決定するための処理装置(22)を備え、
前記現在の測定値(12−n)は、隣接地理的位置の一連の隣接測定値から発生し、
前記一連の隣接測定値のうち、少なくとも1つの隣接測定値(12−(n−1);12−(n−2))は、事前に既に、前記第1の地図対象物(14−1)に割り当てられ、
前記第2の地図対象物(14−2)は、前記第1の地図対象物(14−1)との交差点(18)を有していること、
を特徴とする、装置。
【請求項2】
前記処理装置(22)は、前記現在の測定値(12−n)のために、前記第1の地図対象物(14−1)に関する第1の割り当て確率(P1,1)を決定するように構成され、
前記第1の割り当て確率(P1,1)は、前記現在の測定値(12−n)が、少なくとも2つの前の測定値(12−(n−1);12−(n−2))によって定義された線(32)から、どの位大きく逸脱しているかに依存していること、
を特徴とする、請求項1に記載の装置。
【請求項3】
前記第1の割り当て確率(P1,1)が低ければ低いほど、前記線(32)からの前記現在の測定値(12−n)の逸脱(α)が、より大きいこと、を特徴とする、請求項2に記載の装置。
【請求項4】
前記処理装置(22)は、前記現在の測定値(12−n)のために、前記第1の地図対象物(14−1)に関する第2の割り当て確率(P1,2)を決定するように構成され、
前記第2の割り当て確率(P1,2)は、前記現在の測定値(12−n)が、前記第1の地図対象物(14−1)から、どの位遠くに離れているかに依存していること、
を特徴とする、請求項1〜請求項3のいずれかに記載の装置。
【請求項5】
前記第2の割り当て確率(P1,2)が低ければ低いほど、前記第1の地図対象物(14−1)から前記現在の測定値(12−n)までの距離(d2)が、より長いこと、を特徴とする、請求項4に記載の装置。
【請求項6】
前記処理装置(22)は、前記現在の測定値(12−n)のために、前記第1の地図対象物(14−1)に関する第3の割り当て確率(P1,3)を決定するように構成され、
前記第3の割り当て確率(P1,3)は、前記現在の測定値(12−n)が、前記第1の地図対象物(14−1)と前記第2の地図対象物(14−2)との交差点(18)から、どの位遠くに離れているかに依存していること、
を特徴とする、請求項1〜請求項5のいずれかに記載の装置。
【請求項7】
前記第3の割り当て確率(P1,3)が高ければ高いほど、前記現在の測定値(12−n)から前記交差点(18)までの距離(d3)が、より長いこと、を特徴とする、請求項6に記載の装置。
【請求項8】
前記処理装置(22)は、前記第1の割り当て確率(P1,1)、前記第2の割り当て確率(P1,2)、および/または、前記第3の割り当て確率(P1,3)の少なくともいずれか1つに基づいた前記第1の確率測度(P1)を決定するように構成されていること、を特徴とする、請求項1〜請求項7のいずれかに記載の装置。
【請求項9】
前記処理装置(22)は、前記第1の割り当て確率(P1,1)、前記第2の割り当て確率(P1,2)、および、前記第3の割り当て確率(P1,3)に基づいた前記第1の確率測度(P1)を決定するように構成されていること、を特徴とする、請求項8に記載の装置。
【請求項10】
前記処理装置(22)は、前記現在の測定値(12−n)のために、前記第2の地図対象物(14−2)に関する第4の割り当て確率(P2,1)を決定するように構成され、
前記第4の割り当て確率(P2,1)は、前記第2の地図対象物(14−2)と、前記第1の地図対象物(14−1)に割り当てられた最後の測定値(12−(n−1))と前記現在の測定値(12−n)とで形成された線(34)と、によって形成された角度が、どの位大きいかに依存していること、
を特徴とする、請求項1〜請求項9のいずれかに記載の装置。
【請求項11】
前記第4の割り当て確率(P2,1)が高ければ高いほど、前記角度が、より小さいこと、を特徴とする、請求項10に記載の装置。
【請求項12】
前記処理装置(22)は、前記現在の測定値(12−n)のために、前記第2の地図対象物(14−2)に関する第5の割り当て確率(P2,2)を決定するように構成され、
前記第5の割り当て確率(P2,2)は、前記現在の測定値(12−n)が、前記第2の地図対象物(14−2)から、どの位遠くに離れているかに依存していること、
を特徴とする、請求項1〜請求項11のいずれかに記載の装置。
【請求項13】
前記第5の割り当て確率(P2,2)が高ければ高いほど、前記第2の地図対象物(14−2)から前記現在の測定値(12−n)までの距離が、より短いこと、を特徴とする、請求項12に記載の装置。
【請求項14】
前記処理装置(22)は、前記第4の割り当て確率(P2,1)、および/または、前記第5の割り当て確率(P2,2)の少なくともいずれか1つに基づいた前記第2の確率測度(P2)を決定するように構成されていること、を特徴とする、請求項10〜請求項13のいずれかに記載の装置。
【請求項15】
前記処理装置(22)は、前記第4の割り当て確率(P2,1)および前記第5の割り当て確率(P2,2)に基づいた前記第2の確率測度(P2)を決定するように構成されていること、を特徴とする、請求項14に記載の装置。
【請求項16】
複数の前記第2の地図対象物(14−2)が存在し、それぞれの前記第2の地図対象物(14−2)が、前記第1の地図対象物(14−1)との交差点を有し、かつ、前記現在の測定値(12−n)の予め定義された付近(72)内を通り、
前記処理装置(22)は、複数の前記第2の地図対象物(14−2)ごとに、前記第2の確率測度(P2)に対応する確率測度(P2k)を決定し、このようにして決定された前記確率測度(P2k)から、最も高い確率(maxP2)に対応する前記確率測度(P2k)を選択するように構成されていること、
を特徴とする、請求項1〜請求項15のいずれかに記載の装置。
【請求項17】
前記処理装置(22)は、前記最も高い確率(maxP2)が予め決定された値(X2)を超えるとき、前記最も高い確率(maxP2)に対応する前記第2の地図対象物(14−2)を、前記現在の測定点(12−n)に割り当てるように構成されていること、を特徴とする、請求項16に記載の装置。
【請求項18】
前記処理装置(22)は、前記最も高い確率(maxP2)が予め決定された値(X2)未満であるとき、前記最も高い確率(maxP2)に対応する前記第2の地図対象物(14−2)に基づいた前記第1の確率測度(P1)を決定するように構成されていること、を特徴とする、請求項16に記載の装置。
【請求項19】
仮に、前記第2の地図対象物(14−2)に基づいた前記第1の確率測度(P1)が、予め決定された値(X3)未満であるならば、前記現在の測定点(12−n)の予め定義された地理的付近(72)内の別の地図対象物(79)を選択して、前記別の地図対象物(79)を前記処理装置(22)を供給するように構成されていること、を特徴とする、請求項18に記載の装置。
【請求項20】
前記処理装置(22)は、前記別の地図対象物(79)に関する割り当て確率(P2)に基づいた前記別の地図対象物(79)を決定するように構成され、
前記割り当て確率(P2)は、前記現在の測定値(12−n)が、前記別の地図対象物(79)から、どの位遠くに離れているか、そして、前記別の地図対象物(14−2)と、最後に割り当てられた測定値(12−(n−1))と前記現在の測定値(12−n)とによって形成された線(34)と、によって形成された角度が、どの位大きいか、に依存していること、
を特徴とする、請求項19に記載の装置。
【請求項21】
前記地図対象物(14;79)は、少なくとも区域的に線で形取られた地図対象物であること、を特徴とする、請求項1〜請求項20のいずれかに記載の装置。
【請求項22】
前記地図対象物(14;79)は、道路もしくは経路を表していること、を特徴とする、請求項1〜請求項21のいずれかに記載の装置。
【請求項23】
地理的基準位置の測定座標と前記地理的基準位置に割り当てられた基準測定パケットとを含む基準データを、改良するための装置であって、
地理的地図の地図対象物の座標に、前記地理的基準位置の実際の座標に近似する前記測定座標を照合して、前記測定座標より前記地理的基準位置の前記実際の座標に良く対応する改良座標を得て、そして、前記改良座標を、前記基準測定パケットに割り当てるための処理装置(82)を備え、
前記基準測定パケットは、前記地理的基準位置で決定された基準送信機識別と、基準時に前記基準位置で受信できる無線送信機の電磁界信号特性と、を含むこと、
を特徴とする、装置。
【請求項24】
前記電磁界信号特性は、受信電磁界強度に関連した無線信号の信号特性であること、を特徴とする、請求項23に記載の装置。
【請求項25】
前記電磁界信号特性は、RSSI値、受信電力スペクトル、もしくは、信号対雑音比であること、を特徴とする、請求項24に記載の装置。
【請求項26】
前記処理装置(82)は、基準測定パケットにおいて、地理的な基準位置の測定座標を、改良された座標に置き換えるように構成されていること、を特徴とする、請求項24または請求項25に記載の装置。
【請求項27】
前記地図対象物(14;79)の前記座標は、前記地図対象物(14;79)に割り当てられた風景物の実際の座標に対応していること、を特徴とする、請求項23〜請求項26のいずれかに記載の装置。
【請求項28】
前記地図対象物(14;79)は、道路、経路、もしくは、ビルを表すこと、を特徴とする、請求項23〜請求項27のいずれかに記載の装置。
【請求項29】
地理的位置の現在の測定値(12−n)を、地理的地図の地図対象物(14)に割り当てるための方法であって、
前記現在の測定値(12−n)が、少なくとも区域的に線で形取られた第1の地図対象物(14−1)に割り当てられるかどうかを指示する、第1の確率測度(P1)を決定するステップと、
仮に、前記第1の確率測度(P1)が、前記現在の測定値(12−n)を、前記第1の地図対象物(14−1)に割り当てることがありそうもないことを示すならば、前記現在の測定値(12−n)が、少なくとも区域的に線で形取られた第2の地図対象物(14−2)に割り当てられるかどうかを指示する、第2の確率測度(P2)を決定するステップと、を備え、
前記現在の測定値(12−n)は、隣接地理的位置の一連の隣接測定値から発生し、
前記一連の隣接測定値のうち少なくとも1つの隣接測定値は、事前に既に、前記地図対象物(14−1)に割り当てられ、
前記第2の地図対象物(14−2)は、前記第1の地図対象物(14−1)との交差点(18)を有していること、
を特徴とする、装置。
【請求項30】
地理的基準位置の測定座標と前記地理的基準位置に割り当てられた基準測定パケットとを含む基準データを、改良するための方法であって、
地理的地図の地図対象物の座標に、前記地理的基準位置の実際の座標に近似する前記測定座標を照合して、前記測定座標より前記地理的基準位置の前記実際の座標に良く対応する改良座標を得る照合ステップと、
前記改良座標を、前記基準測定パケットに割り当てるステップと、を備え、
前記基準測定パケットは、前記地理的基準位置で決定された基準送信機識別と、基準時に前記基準位置で受信できる無線送信機の電磁界信号特性と、を含むこと、
を特徴とする、方法。
【請求項31】
前記照合ステップは、
前記測定座標が、少なくとも区域的に線で形取られた第1の地図対象物(14−1)に割り当てられるかどうかを指示する、第1の確率測度(P1)を決定するステップと、
仮に、前記第1の確率測度(P1)が、前記地理的基準位置の前記測定座標を、前記第1の地図対象物(14−1)に割り当てることがありそうもないことを示すならば、前記測定座標が、少なくとも区域的に線で形取られた第2の地図対象物(14−2)に割り当てられるかどうかを指示する、第2の確率測度(P2)を決定するステップと、を備え、
一連の隣接測定座標のうち少なくとも1つの隣接測定座標は、事前に既に、前記地図対象物(14−1)に割り当てられ、
前記第2の地図対象物(14−2)は、前記第1の地図対象物(14−1)との交差点(18)を有していること、
を特徴とする、請求項30に記載の方法。
【請求項32】
コンピュータもしくはマイクロコントローラが稼動するとき、請求項29〜請求項31のいずれかに記載の方法がを実行されること、を特徴とする、コンピュータプログラム。
【図2】

【図3a】
【図3b】
【図3c】
【図4】
【図5a】
【図5b】
【図6】
【図8】
【図1】
【図7】
【図3a】
【図3b】
【図3c】
【図4】
【図5a】
【図5b】
【図6】
【図8】
【図1】
【図7】
【公表番号】特表2011−525623(P2011−525623A)
【公表日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願番号】特願2011−515192(P2011−515192)
【出願日】平成21年6月23日(2009.6.23)
【国際出願番号】PCT/EP2009/004524
【国際公開番号】WO2009/156126
【国際公開日】平成21年12月30日(2009.12.30)
【出願人】(591037214)フラウンホッファー−ゲゼルシャフト ツァ フェルダールング デァ アンゲヴァンテン フォアシュンク エー.ファオ (259)
【Fターム(参考)】
【公表日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願日】平成21年6月23日(2009.6.23)
【国際出願番号】PCT/EP2009/004524
【国際公開番号】WO2009/156126
【国際公開日】平成21年12月30日(2009.12.30)
【出願人】(591037214)フラウンホッファー−ゲゼルシャフト ツァ フェルダールング デァ アンゲヴァンテン フォアシュンク エー.ファオ (259)
【Fターム(参考)】
[ Back to top ]