
地盤変化の調査方法
【課題】より正確な調査結果が得られる地盤変化の調査方法を提供する。
【解決手段】本発明は、地盤上の複数の調査ポイントPSiの座標の生の変化量ΔBX(PSi)、及び、地盤上の少なくとも1の参照ポイントPRiの座標の生の変化量ΔBX(PRi)を提供する工程と、参照ポイントの座標の真の変化量ΔRX(PRi)を決定する工程S110と、調査ポイントの座標の生の変化量、参照ポイントの座標の生の変化量、及び、参照ポイントの座標の真の変化量に基づいて、調査ポイントの座標の補正された変化量ΔCX(PSi)を算出する工程S130と、を備えている。
【解決手段】本発明は、地盤上の複数の調査ポイントPSiの座標の生の変化量ΔBX(PSi)、及び、地盤上の少なくとも1の参照ポイントPRiの座標の生の変化量ΔBX(PRi)を提供する工程と、参照ポイントの座標の真の変化量ΔRX(PRi)を決定する工程S110と、調査ポイントの座標の生の変化量、参照ポイントの座標の生の変化量、及び、参照ポイントの座標の真の変化量に基づいて、調査ポイントの座標の補正された変化量ΔCX(PSi)を算出する工程S130と、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地盤の滑り、崩壊、鉛直歪み等の、様々な地盤変化を調査する技術分野に関する。
【背景技術】
【0002】
特に建築物への損害や地盤上での土木作業への損害を防止するため、地盤変化の調査が必要である。
【0003】
地下での土木作業も、地盤変化の要因となり得る。
【0004】
例えばトンネルや基礎等の地下での土木作業中に、地盤が崩壊し易い。
【0005】
従来技術によれば、調査すべき地盤上又は工作物上に調査対象を観測するための1又は複数のセオドライトを配置して、地盤変化の調査が行われる。
【0006】
最近では、地盤上の複数の調査ポイントの変化を調査するため、衛星画像を使用することが試みられている。
【0007】
この場合、調査すべき地盤の複数のレーダー画像及びデジタル地形モデルに基づいた、干渉計測法による調査が行わる。レーダー画像やデジタル地形モデルのデータは市販で容易に手に入れることができる点に特徴がある。
【0008】
上記の干渉計測法による調査では、地盤の複数の調査ポイントが選択される。最近、レーダー画像で明確に視認できる調査ポイントを選択するためのいくつかのアルゴリズムが存在する。
【0009】
調査ポイントは、十分に確認できる程度の強度のエコーを人工衛星の周期毎に人工衛星に戻すように、選択される。
【0010】
このようにして、調査ポイントのインターフェログラムが導出される。
【0011】
干渉計測法による調査の結果、調査対象の領域において、調査ポイントのリスト、調査ポイントの生の(raw)座標、及び生の(raw) 座標変化量を得ることが可能となる。
【0012】
しかしながら、上記の干渉計測法による調査の結果は、一般に、ノイズがあり(noisy)且つ質が変動し易いことが知られている。換言すると、上記調査で得られる生の座標及び生の座標変化量は、比較的不正確であり、そのままの状態で使用することは困難である。
【発明の概要】
【発明が解決しようとする課題】
【0013】
本発明の目的は、より正確な調査結果が得られる地盤変化の調査方法を提供することである。
【課題を解決するための手段】
【0014】
上記目的達成するため、本発明に係る調査方法は、地盤上の複数の調査ポイントの座標の生の変化量、及び、地盤上の少なくとも1の参照ポイントの座標の生の変化量を提供する工程と、前記参照ポイントの座標の真の変化量を決定する工程と、前記調査ポイントの座標の生の変化量、前記参照ポイントの座標の生の変化量、及び、前記参照ポイントの座標の真の変化量に基づいて、前記調査ポイントの座標の補正された変化量を算出する工程と、を備えている。
【0015】
本発明において、参照ポイントは、座標の変化量が正確に知られているポイントである。正確に知られている変化量は、「真の」変化量と称される。これに対し、「生の」変化量は、不正確であるものとして知られている変化量である。
【0016】
「生の」変化量は、特に上述した干渉計測法による調査の結果得られるものであってよいが、これに限定されるものではない。
【0017】
「真の」変化量は、1又は複数のセオドライトを用いたトポグラフィによって決定されてよい。また、複数の参照ポイントを用いることが好ましい。
【0018】
本発明は、座標の生の変化量を得るために用いられるアルゴリズムとは全く独立したものである。
【0019】
生の変化量は、衛星データ以外のデータから得られるものであってよい。
【0020】
座標の生の変化量は、調査期間を構成する複数の時点で定期的に提供されることが好ましい。参照ポイントの座標の真の変化量は、上記複数の時点のそれぞれにおいて決定される。
【0021】
本発明の調査方法は、前記調査ポイントのうち少なくとも1つの調査ポイントの座標の少なくとも1つについて、補正された経時的な変化量を決定する工程をさらに備えていることが好ましい。
【0022】
前記調査ポイントのうち少なくとも1つの調査ポイントの座標の少なくとも1つについての前記補正された経時的な的変化量が、当該調査ポイントの高度の補正された変化量であることが好ましい。
【0023】
本発明によると、複数の調査ポイントの高度の変化量を表示することができる。より詳細には、複数の調査ポイントは、調査期間中の各調査ポイントの移動量の平均を用いて、視認可能に表示される。
【0024】
本発明の調査方法は、前記経時的な変化量を表示する表示工程をさらに備えていることが好ましい。本発明において、当該表示は、データテーブル、グラフ、動画、等高線、その他、オペレータが座標の補正された経時的な変化量を知り得る任意の方法で行われてよい。
【0025】
前記表示工程の間、前記調査ポイントのそれぞれの位置と高度の補正された変化量とが、地理情報システムの地図及び衛星地図のいずれかに表示されることが好ましい。
【0026】
高度の補正された変化量は、例えば、調査ポイントの高度の経時的な変化量を示す色範囲及びグラフのいずれかで図示されてよい。
【0027】
前記調査ポイントの座標の補正された変化量を算出する工程は、連続する2つの時点での前記参照ポイントの生の座標及び真の座標の変化量を用いて行われることが好ましい。
【0028】
より正確には、前記調査ポイントの座標の補正された変化量を算出する工程が、最小二乗法による誤差分布アルゴリズムを実行してよい。当該アルゴリズムには、参照ポイントに関連するデータが組み込まれている。
【0029】
上記算出は、複数の調査ポイントの高度の変化量に基づいて、表面を生成することにある。その後、表面は、参照ポイントの座標の真の変化量にできるだけ一致するように変形させることで、最適化される。
【0030】
本発明の調査方法は、前記調査ポイントの生の座標、及び、前記参照ポイントの生の座標を提供する工程と、前記参照ポイントの真の座標を決定する工程と、前記調査ポイントの生の座標、前記参照ポイントの生の座標、及び、前記参照ポイントの真の座標に基づいて、前記調査ポイントの補正された座標を算出する工程と、をさらに備えていることが好ましい。
【0031】
換言すると、参照ポイントは、調査ポイントの座標の補正に用いられる。参照ポイントの真の座標と、特に干渉計測法によって推定される参照ポイントの生の座標とを知ることにより、例えば移行(参照ポイントの生の座標から真の座標への移行等)の際の変化等、全ての調査ポイントについて、補正が適用される。これにより、調査ポイントの補正された座標が得られる。
【0032】
調査ポイントの高度の変化量を調査するために本調査方法が用いられる場合は、調査ポイントの座標は、調査開始時に1回だけ補正されることが好ましい。補正は、座標の補正された変化量を用いて得られる高度の変化量を用いて、原則として調査ポイントの位置を正確に得るために行われる。
【0033】
前記座標の生の変化量及び前記生の座標の少なくともいずれかが、デジタル地形モデル及び少なくとも1のレーダー画像取得装置によって取得された複数のレーダー画像に基づいた干渉計測法による調査によって、導き出されることが好ましい。上記レーダー画像取得装置は、好ましくは人工衛星である。
【0034】
前記調査ポイントの少なくとも1つが、前記レーダー画像取得装置に向けられた少なくとも1の電磁波反射部材を含むことが好ましい。電磁波反射部材によって、調査ポイントの視認性が必要に応じて向上する。
【0035】
前記参照ポイントの少なくとも1つが、前記レーダー画像取得装置に向けられた少なくとも1の電磁波反射部材を含むことが好ましい。この場合も上記の場合と同様、電磁波反射部材によって、参照ポイントの視認性が必要に応じて向上するか、或いは、例えば安定領域に位置しているとして知られているために正確に座標が知られている参照ポイントが視認可能に表示される。ある特定の好適な参照ポイントは、レーダー画像取得装置で自然には視認できない可能性がある。本発明によれば、上記のような特定の好適な参照ポイントのレーダー画像における視認可能化(又は視認性の向上)を実現することで、当該参照ポイントの「質」を利用することができる。
【0036】
電磁波反射部材は、互いに異なる軌道を通る複数の人工衛星に向けられるように操作できることが好ましい。
【0037】
参照ポイントの真の位置を決定することに関して言えば、前記参照ポイントの真の座標が、GPS(global positioning system:全地球測位システム)及びトポグラフィのいずれかによって決定されることが好ましい。トポグラフィの測量を行うには、セオドライトを用いてよい。真の座標の変化量は、トポグラフィによって決定されることが好ましい。
【0038】
本発明はまた、コンピュータで実行された場合に上記の調査方法の工程を実行する指令を含む、コンピュータプログラムを提供する。
【0039】
当該コンピュータプログラムは、どのプログラミング言語を用いたものでもよく、また、ソースコードの形式、オブジェクトコードの形式、又は、特に規定の形式やその他所望の形式等のようにソースコードとオブジェクトコードとの中間のコードの形式であってもよい。
【0040】
本発明はまた、コンピュータによって読み取り可能であり、上記コンピュータプログラムが記録されている記録媒体を提供する。
【0041】
当該記録媒体は、例えばハードディスク、シーディーロム(CD−ROM)、フロッピー(登録商標)ディスク、その他ローカル・コンピュータ内又はリモート・サーバ内に配置可能な様々なタイプの媒体であってよい。
【0042】
本発明はさらに、地下の土木作業(例えばトンネル工事)の際に特に生じ易い地盤の非線形の変形を調査するための、上記調査方法の使用を提供する。なお、本発明によれば、線形の変形の調査も可能である。
【図面の簡単な説明】
【0043】
【図1】本発明に係る調査方法の工程を示す図である。
【図2】参照ポイントに配置されるレーダー波反射部材の斜視図である。
【図3】調査ポイントの座標の生の変化量から得られる生の表面、及び、参照ポイントの真の変化量を示す図である。
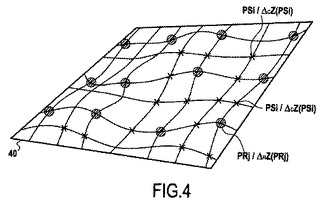
【図4】図3の生の表面を変形させて得られた、補正された表面を示す図である。
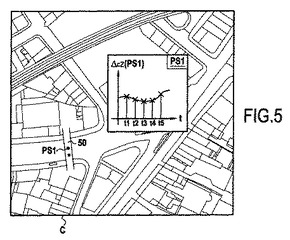
【図5】補正後の2つの調査ポイントと、これら2つの調査ポイントのうちの1つの高度の補正された変化量とを示す図である。
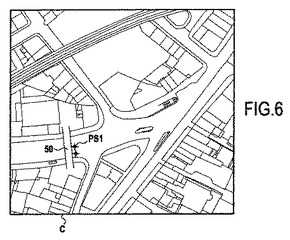
【図6】生の座標が補正されていない状態の2つの調査ポイントを示す図である。
【図7】本発明に係る調査方法を実行するコンピュータプログラムが記録されているハードディスクを含むコンピュータを示す図である。
【発明を実施するための形態】
【0044】
先ず、図1を参照しつつ、本発明に係る調査方法の工程について説明する。
【0045】
本発明に係る調査方法は、複数の調査ポイントPSiの生の座標における経時的な変化量を用いる。
【0046】
上述のように、本発明に係る調査方法は、座標の生の変化量を得るために用いられる手段又はアルゴリズムとは独立したものである。当該手段又はアルゴリズムは公知である。
【0047】
本発明に係る調査方法は、座標の生の変化量を得るための干渉計側法の工程又は調査を用いる。干渉計側法の工程は公知である。
【0048】
干渉計側法の工程の詳細を説明する前に、本発明において、調査ポイントは地盤上の領域である。地盤は、レーダー波の非常に良好な反射物であり、好適には徐々に一定になる反射特性を有する。このことは、調査ポイントの経時的な移動を検出及び調査することが可能であることを意味する。例えば、調査ポイントは、建築物、家屋の屋根、橋梁の欄干、配管、その他任意の反射構造物によって構成されてよい。
【0049】
干渉計側法の工程は、図1のS10に対応する。当該工程では、調査すべき地盤の複数のレーダー画像12が用いられる。これらレーダー画像12は、少なくとも1の人工衛星Sによって、異なる時点で、取得される。通常、各レーダー画像12は、振幅及び位相を有する。干渉計側法は、特に、連続する2つの時点で取得された2つのレーダー画像の位相差に基づく。
【0050】
干渉計側法の工程はまた、デジタル地形モデル(DTM)14を必要とする。DTM14は、トポグラフィの位相信号への関与を除去することに寄与すると共に、レーダーの形状と地理的な形状とを変換するためのマトリックスを生成する。
【0051】
DTM14は、調査対象の領域、即ち調査すべき地盤をカバーする。
【0052】
DTM14は、一般に、インターネットで入手可能である。例えば、SRTMモデルを選択することができる。
【0053】
S16において、調査ポイントのリスト及び調査ポイントの生の座標が決定される。ENVISATデータを用いることで、5〜10m(メートル)の精度の生の座標を得ることができる。
【0054】
S16において、レーダー画像の生の座標を生の地理的な座標に変換するマトリックスが算出される。
【0055】
本発明に係る調査方法を実行する際、地理的な座標を用いることが好ましい。
【0056】
その後、生のインターフェログラムが算出される。算出された生のインターフェログラムは、後に、信号の構成要素を分解する工程S18で用いられる。当該工程(ノイズ除去工程)S18は、地盤変化に関連する要素以外の要素を除去することにある。当該除去される要素は、トポグラフィの軌道の問題又は大気中の成分の変動性に関連する要素であってよい。
【0057】
したがって、干渉計側法の工程によれば、調査対象の領域において、調査ポイントPSiのリストを得ることができる。ここで、X=(x,y,z)とした場合、調査ポイントPSiの生の座標はXB(PSi)、座標の生の変化量はΔBX(PSi)と表わされる。
【0058】
以下、本発明に係る調査方法の工程についてより詳細に説明する。当該工程は、図1のS100にまとめられており、干渉計側法の工程S10で得られる生のデータに基づいて行われる。
【0059】
本実施形態において、座標の生の変化量はΔBz(PSi)と表わされる。ここで、zは、調査ポイントの高度であり、鉛直方向に関する座標である。本発明によれば、少なくとも1つ(好ましくは複数)の参照ポイントPRiが、地盤、即ち調査対象の領域から選択される。
【0060】
参照ポイントPRiは、例えば、地盤上に位置し、経時的な座標の変化量を正確に知られている又は知ることができるポイントである。参照ポイントPRiは、通常、地盤の安定した領域、少なくとも内部の経時的な活動が非常に小さな地盤の領域、又は、内部の活動を容易に計測し得る地盤の領域に位置する。ただし、これに限定されるものではない。本実施形態では、計側の精度を向上させるために複数の参照ポイントPRiを用いる。
【0061】
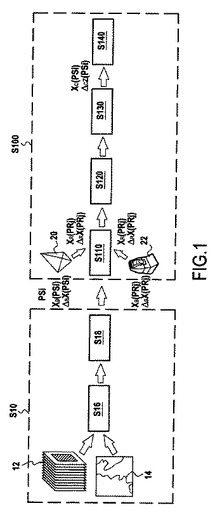
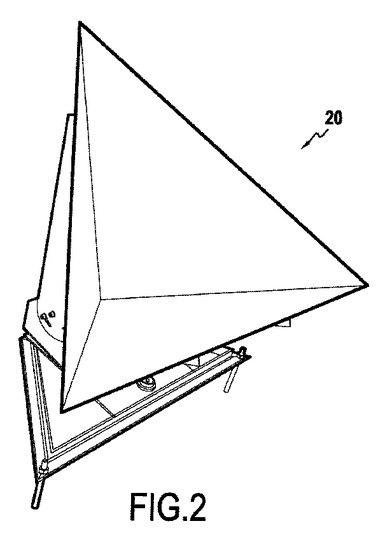
本発明の観点において、参照ポイントPRiのいくつかは、当該参照ポイントPRiが人工衛星Sで撮影されるレーダー画像12に明確に示されるのに十分な自然電磁波反射性能を有さない場合、図2に示すレーダー波反射部材20がそれぞれ配置される。レーダー波反射部材20はそれぞれ、図3に示すように、人工衛星Sの視軸Aに一致するように配置されている。
【0062】
レーダー波反射部材20は、互いに異なる軌道を通る人工衛星の視軸に一致することができるように方向転換可能であるという特徴を有する。レーダー波反射部材20は、傾斜角度及び方位角を調整可能な三面体の形状を有する。本実施形態で用いられる人工衛星は、鉛直方向に対する視軸の角度が23°のENVISATである。
【0063】
ここで、X=(x,y,z)とした場合、上述した干渉計側法の工程によって得られる参照ポイントPRiの生の座標はXB(PRi)、座標の生の変化量はΔBX(PRi)と表わされる。
【0064】
本発明によれば、S110において、参照ポイントの座標の真の変化量ΔRX(PRi)が参照ポイントの真の座標XR(PRi)と決定される。
【0065】
本実施形態において、参照ポイントの座標の真の変化量及び真の座標は、GPS及びトポグラフィのいずれかによって決定される。これらの計側は、定期的(例えば、レーダー画像12が取得される日毎)に行われることが好ましい。トポグラフィは、参照ポイントPRiに照準を合わせた1又は複数のセオドライト22を用いて行ってよい。
【0066】
上記の計側によって、参照ポイントの座標の真の変化量を示すベクトルを算出することが可能となる。
【0067】
調査期間を通して正確に知られている真の座標XR(PRk)及び座標の真の変化量ΔRX(PRk)を有する参照ポイントPRkについては、上記のような定期的な計測は不要である。このような参照ポイントPRkは、通常、レーダー波反射部材20が配置されており、位置変動のない地盤の領域に位置する。
【0068】
その後、S120において、調査ポイントの補正された座標XC(PSi)を算出する。当該工程は、調査ポイントの生の座標XB(PSi)、参照ポイントの生の座標XB(PRi)、及び、参照ポイントの真の座標XR(PRi)に基づいて行われる。
【0069】
上記工程において、調査ポイントの生の座標を補正するのに、参照ポイントが用いられる。ここで、参照ポイントの真の座標、及び、干渉計側法の工程S10で得られる参照ポイントの生の座標は、知られている。参照ポイントの生の座標XB(PRi)と真の座標XR(PRi)との間(例えば移行の際の変化量)で補正値の算出が行われ得る。そして当該補正は全ての参照ポイントの生の座標XB(PSi)に適用され、調査ポイントの補正された座標XC(PSi)が得られる。これにより、調査ポイントの精度を格段に向上させることができる。
【0070】
S130では、調査ポイントの座標の生の変化量ΔBX(PSi)、参照ポイントの座標の生の変化量ΔBX(PRi)、及び、参照ポイントの座標の真の変化量ΔRX(PRi)に基づいて、調査ポイントの座標の補正された変化量ΔCX(PSi)が算出される。
【0071】
上記工程においては、レーダー画像12の最も古いものが取得された時点を、参照時間とする。座標の変化量は、参照時間に対する変化量であり、参照ポイントの1つに関するものである。
【0072】
人工衛星Sで取得されるレーダー画像12について、参照ポイントの真の座標を含む最小二乗法による誤差分布アルゴリズムを実行する。当該アルゴリズムは、2つのレーダー画像間の座標の変化量に適用される。本実施形態において、現時点での補正された座標の変化量を得るための工程S130は、第2のレーダー画像が取得された時点と現時点との間で適用される。ここで、第2のレーダー画像は、参照時間に取得されたレーダー画像の後に取得される。
【0073】
上記算出は、調査ポイントの高度の生の変化量ΔBz(PSi)と参照ポイントの高度の生の変化量ΔBz(PRi)とに基づいて、図3に点線で示されている数学的な表面30を生成することにある。本実施形態において、z以外の2つの座標(x,y)は、地盤の沈下を調査の対象とする限り、無視される。
【0074】
その後、表面30は、上述したアルゴリズムによって、参照ポイントの高度の真の変化量ΔRz(PRi)にできるだけ一致するように変形させることで、最適化される。これにより、調査ポイントの高度の補正された変化量をΔCz(PSi)として、図4に実線で示す補正された表面40が得られる。
【0075】
なお、本発明の範囲を超えない限りは、調査ポイントの他の2つの座標(x,y)についても真の変化量を算出してよい。
【0076】
本発明では、1の調査ポイントPS1の補正された座標の少なくとも1の経時的な変化量を表示する工程S140が行われる。本実施形態では、図5に示すように、地理情報システムの地図C上に、調査ポイントPS1の位置及びその高度の補正された変化量が表示されている。調査ポイントPS1は、補正された座標に基づいて配置されている。
【0077】
図6には、調査ポイントPS1の生の座標に基づく位置が示されている。ここでは、調査ポイントPS1が橋50を外れた水中の不正な位置にあることが分かるであろう。
【0078】
調査ポイントPS1を選択することで、ユーザは、当該調査ポイントPS1の高度の補正された経時的な変化量ΔCz(PS1)のグラフを得ることができる。ユーザが地図C上で素早く視認できるよう、色コードが用いられてよい。調査ポイントの色コードは、現時点で高度の最大の変化量を示す。
【0079】
本発明に係る調査方法は、標準プログラミング言語での指令を含むコンピュータプログラムの形態で提供されることが好ましい。本実施形態において、コンピュータプログラムは、図7に示すコンピュータ62のハードディスク60に記録されている。
【0080】
本発明に係るコンピュータプログラム又はその一部は、リモート・コンピュータによってリモートアクセス可能なサーバに読み込まれてもよい。
【0081】
本発明に係る調査方法によると、トンネル等の地下の土木作業が行われている最中における、いかなる地盤の崩壊をも検知することができる。トンネルの建設で生じる変形は非線形の場合が多く、従来用いられているアルゴリズムは線形回帰に依存するため、上記のような非線形の変形を検知することはできない。
【技術分野】
【0001】
本発明は、地盤の滑り、崩壊、鉛直歪み等の、様々な地盤変化を調査する技術分野に関する。
【背景技術】
【0002】
特に建築物への損害や地盤上での土木作業への損害を防止するため、地盤変化の調査が必要である。
【0003】
地下での土木作業も、地盤変化の要因となり得る。
【0004】
例えばトンネルや基礎等の地下での土木作業中に、地盤が崩壊し易い。
【0005】
従来技術によれば、調査すべき地盤上又は工作物上に調査対象を観測するための1又は複数のセオドライトを配置して、地盤変化の調査が行われる。
【0006】
最近では、地盤上の複数の調査ポイントの変化を調査するため、衛星画像を使用することが試みられている。
【0007】
この場合、調査すべき地盤の複数のレーダー画像及びデジタル地形モデルに基づいた、干渉計測法による調査が行わる。レーダー画像やデジタル地形モデルのデータは市販で容易に手に入れることができる点に特徴がある。
【0008】
上記の干渉計測法による調査では、地盤の複数の調査ポイントが選択される。最近、レーダー画像で明確に視認できる調査ポイントを選択するためのいくつかのアルゴリズムが存在する。
【0009】
調査ポイントは、十分に確認できる程度の強度のエコーを人工衛星の周期毎に人工衛星に戻すように、選択される。
【0010】
このようにして、調査ポイントのインターフェログラムが導出される。
【0011】
干渉計測法による調査の結果、調査対象の領域において、調査ポイントのリスト、調査ポイントの生の(raw)座標、及び生の(raw) 座標変化量を得ることが可能となる。
【0012】
しかしながら、上記の干渉計測法による調査の結果は、一般に、ノイズがあり(noisy)且つ質が変動し易いことが知られている。換言すると、上記調査で得られる生の座標及び生の座標変化量は、比較的不正確であり、そのままの状態で使用することは困難である。
【発明の概要】
【発明が解決しようとする課題】
【0013】
本発明の目的は、より正確な調査結果が得られる地盤変化の調査方法を提供することである。
【課題を解決するための手段】
【0014】
上記目的達成するため、本発明に係る調査方法は、地盤上の複数の調査ポイントの座標の生の変化量、及び、地盤上の少なくとも1の参照ポイントの座標の生の変化量を提供する工程と、前記参照ポイントの座標の真の変化量を決定する工程と、前記調査ポイントの座標の生の変化量、前記参照ポイントの座標の生の変化量、及び、前記参照ポイントの座標の真の変化量に基づいて、前記調査ポイントの座標の補正された変化量を算出する工程と、を備えている。
【0015】
本発明において、参照ポイントは、座標の変化量が正確に知られているポイントである。正確に知られている変化量は、「真の」変化量と称される。これに対し、「生の」変化量は、不正確であるものとして知られている変化量である。
【0016】
「生の」変化量は、特に上述した干渉計測法による調査の結果得られるものであってよいが、これに限定されるものではない。
【0017】
「真の」変化量は、1又は複数のセオドライトを用いたトポグラフィによって決定されてよい。また、複数の参照ポイントを用いることが好ましい。
【0018】
本発明は、座標の生の変化量を得るために用いられるアルゴリズムとは全く独立したものである。
【0019】
生の変化量は、衛星データ以外のデータから得られるものであってよい。
【0020】
座標の生の変化量は、調査期間を構成する複数の時点で定期的に提供されることが好ましい。参照ポイントの座標の真の変化量は、上記複数の時点のそれぞれにおいて決定される。
【0021】
本発明の調査方法は、前記調査ポイントのうち少なくとも1つの調査ポイントの座標の少なくとも1つについて、補正された経時的な変化量を決定する工程をさらに備えていることが好ましい。
【0022】
前記調査ポイントのうち少なくとも1つの調査ポイントの座標の少なくとも1つについての前記補正された経時的な的変化量が、当該調査ポイントの高度の補正された変化量であることが好ましい。
【0023】
本発明によると、複数の調査ポイントの高度の変化量を表示することができる。より詳細には、複数の調査ポイントは、調査期間中の各調査ポイントの移動量の平均を用いて、視認可能に表示される。
【0024】
本発明の調査方法は、前記経時的な変化量を表示する表示工程をさらに備えていることが好ましい。本発明において、当該表示は、データテーブル、グラフ、動画、等高線、その他、オペレータが座標の補正された経時的な変化量を知り得る任意の方法で行われてよい。
【0025】
前記表示工程の間、前記調査ポイントのそれぞれの位置と高度の補正された変化量とが、地理情報システムの地図及び衛星地図のいずれかに表示されることが好ましい。
【0026】
高度の補正された変化量は、例えば、調査ポイントの高度の経時的な変化量を示す色範囲及びグラフのいずれかで図示されてよい。
【0027】
前記調査ポイントの座標の補正された変化量を算出する工程は、連続する2つの時点での前記参照ポイントの生の座標及び真の座標の変化量を用いて行われることが好ましい。
【0028】
より正確には、前記調査ポイントの座標の補正された変化量を算出する工程が、最小二乗法による誤差分布アルゴリズムを実行してよい。当該アルゴリズムには、参照ポイントに関連するデータが組み込まれている。
【0029】
上記算出は、複数の調査ポイントの高度の変化量に基づいて、表面を生成することにある。その後、表面は、参照ポイントの座標の真の変化量にできるだけ一致するように変形させることで、最適化される。
【0030】
本発明の調査方法は、前記調査ポイントの生の座標、及び、前記参照ポイントの生の座標を提供する工程と、前記参照ポイントの真の座標を決定する工程と、前記調査ポイントの生の座標、前記参照ポイントの生の座標、及び、前記参照ポイントの真の座標に基づいて、前記調査ポイントの補正された座標を算出する工程と、をさらに備えていることが好ましい。
【0031】
換言すると、参照ポイントは、調査ポイントの座標の補正に用いられる。参照ポイントの真の座標と、特に干渉計測法によって推定される参照ポイントの生の座標とを知ることにより、例えば移行(参照ポイントの生の座標から真の座標への移行等)の際の変化等、全ての調査ポイントについて、補正が適用される。これにより、調査ポイントの補正された座標が得られる。
【0032】
調査ポイントの高度の変化量を調査するために本調査方法が用いられる場合は、調査ポイントの座標は、調査開始時に1回だけ補正されることが好ましい。補正は、座標の補正された変化量を用いて得られる高度の変化量を用いて、原則として調査ポイントの位置を正確に得るために行われる。
【0033】
前記座標の生の変化量及び前記生の座標の少なくともいずれかが、デジタル地形モデル及び少なくとも1のレーダー画像取得装置によって取得された複数のレーダー画像に基づいた干渉計測法による調査によって、導き出されることが好ましい。上記レーダー画像取得装置は、好ましくは人工衛星である。
【0034】
前記調査ポイントの少なくとも1つが、前記レーダー画像取得装置に向けられた少なくとも1の電磁波反射部材を含むことが好ましい。電磁波反射部材によって、調査ポイントの視認性が必要に応じて向上する。
【0035】
前記参照ポイントの少なくとも1つが、前記レーダー画像取得装置に向けられた少なくとも1の電磁波反射部材を含むことが好ましい。この場合も上記の場合と同様、電磁波反射部材によって、参照ポイントの視認性が必要に応じて向上するか、或いは、例えば安定領域に位置しているとして知られているために正確に座標が知られている参照ポイントが視認可能に表示される。ある特定の好適な参照ポイントは、レーダー画像取得装置で自然には視認できない可能性がある。本発明によれば、上記のような特定の好適な参照ポイントのレーダー画像における視認可能化(又は視認性の向上)を実現することで、当該参照ポイントの「質」を利用することができる。
【0036】
電磁波反射部材は、互いに異なる軌道を通る複数の人工衛星に向けられるように操作できることが好ましい。
【0037】
参照ポイントの真の位置を決定することに関して言えば、前記参照ポイントの真の座標が、GPS(global positioning system:全地球測位システム)及びトポグラフィのいずれかによって決定されることが好ましい。トポグラフィの測量を行うには、セオドライトを用いてよい。真の座標の変化量は、トポグラフィによって決定されることが好ましい。
【0038】
本発明はまた、コンピュータで実行された場合に上記の調査方法の工程を実行する指令を含む、コンピュータプログラムを提供する。
【0039】
当該コンピュータプログラムは、どのプログラミング言語を用いたものでもよく、また、ソースコードの形式、オブジェクトコードの形式、又は、特に規定の形式やその他所望の形式等のようにソースコードとオブジェクトコードとの中間のコードの形式であってもよい。
【0040】
本発明はまた、コンピュータによって読み取り可能であり、上記コンピュータプログラムが記録されている記録媒体を提供する。
【0041】
当該記録媒体は、例えばハードディスク、シーディーロム(CD−ROM)、フロッピー(登録商標)ディスク、その他ローカル・コンピュータ内又はリモート・サーバ内に配置可能な様々なタイプの媒体であってよい。
【0042】
本発明はさらに、地下の土木作業(例えばトンネル工事)の際に特に生じ易い地盤の非線形の変形を調査するための、上記調査方法の使用を提供する。なお、本発明によれば、線形の変形の調査も可能である。
【図面の簡単な説明】
【0043】
【図1】本発明に係る調査方法の工程を示す図である。
【図2】参照ポイントに配置されるレーダー波反射部材の斜視図である。
【図3】調査ポイントの座標の生の変化量から得られる生の表面、及び、参照ポイントの真の変化量を示す図である。
【図4】図3の生の表面を変形させて得られた、補正された表面を示す図である。
【図5】補正後の2つの調査ポイントと、これら2つの調査ポイントのうちの1つの高度の補正された変化量とを示す図である。
【図6】生の座標が補正されていない状態の2つの調査ポイントを示す図である。
【図7】本発明に係る調査方法を実行するコンピュータプログラムが記録されているハードディスクを含むコンピュータを示す図である。
【発明を実施するための形態】
【0044】
先ず、図1を参照しつつ、本発明に係る調査方法の工程について説明する。
【0045】
本発明に係る調査方法は、複数の調査ポイントPSiの生の座標における経時的な変化量を用いる。
【0046】
上述のように、本発明に係る調査方法は、座標の生の変化量を得るために用いられる手段又はアルゴリズムとは独立したものである。当該手段又はアルゴリズムは公知である。
【0047】
本発明に係る調査方法は、座標の生の変化量を得るための干渉計側法の工程又は調査を用いる。干渉計側法の工程は公知である。
【0048】
干渉計側法の工程の詳細を説明する前に、本発明において、調査ポイントは地盤上の領域である。地盤は、レーダー波の非常に良好な反射物であり、好適には徐々に一定になる反射特性を有する。このことは、調査ポイントの経時的な移動を検出及び調査することが可能であることを意味する。例えば、調査ポイントは、建築物、家屋の屋根、橋梁の欄干、配管、その他任意の反射構造物によって構成されてよい。
【0049】
干渉計側法の工程は、図1のS10に対応する。当該工程では、調査すべき地盤の複数のレーダー画像12が用いられる。これらレーダー画像12は、少なくとも1の人工衛星Sによって、異なる時点で、取得される。通常、各レーダー画像12は、振幅及び位相を有する。干渉計側法は、特に、連続する2つの時点で取得された2つのレーダー画像の位相差に基づく。
【0050】
干渉計側法の工程はまた、デジタル地形モデル(DTM)14を必要とする。DTM14は、トポグラフィの位相信号への関与を除去することに寄与すると共に、レーダーの形状と地理的な形状とを変換するためのマトリックスを生成する。
【0051】
DTM14は、調査対象の領域、即ち調査すべき地盤をカバーする。
【0052】
DTM14は、一般に、インターネットで入手可能である。例えば、SRTMモデルを選択することができる。
【0053】
S16において、調査ポイントのリスト及び調査ポイントの生の座標が決定される。ENVISATデータを用いることで、5〜10m(メートル)の精度の生の座標を得ることができる。
【0054】
S16において、レーダー画像の生の座標を生の地理的な座標に変換するマトリックスが算出される。
【0055】
本発明に係る調査方法を実行する際、地理的な座標を用いることが好ましい。
【0056】
その後、生のインターフェログラムが算出される。算出された生のインターフェログラムは、後に、信号の構成要素を分解する工程S18で用いられる。当該工程(ノイズ除去工程)S18は、地盤変化に関連する要素以外の要素を除去することにある。当該除去される要素は、トポグラフィの軌道の問題又は大気中の成分の変動性に関連する要素であってよい。
【0057】
したがって、干渉計側法の工程によれば、調査対象の領域において、調査ポイントPSiのリストを得ることができる。ここで、X=(x,y,z)とした場合、調査ポイントPSiの生の座標はXB(PSi)、座標の生の変化量はΔBX(PSi)と表わされる。
【0058】
以下、本発明に係る調査方法の工程についてより詳細に説明する。当該工程は、図1のS100にまとめられており、干渉計側法の工程S10で得られる生のデータに基づいて行われる。
【0059】
本実施形態において、座標の生の変化量はΔBz(PSi)と表わされる。ここで、zは、調査ポイントの高度であり、鉛直方向に関する座標である。本発明によれば、少なくとも1つ(好ましくは複数)の参照ポイントPRiが、地盤、即ち調査対象の領域から選択される。
【0060】
参照ポイントPRiは、例えば、地盤上に位置し、経時的な座標の変化量を正確に知られている又は知ることができるポイントである。参照ポイントPRiは、通常、地盤の安定した領域、少なくとも内部の経時的な活動が非常に小さな地盤の領域、又は、内部の活動を容易に計測し得る地盤の領域に位置する。ただし、これに限定されるものではない。本実施形態では、計側の精度を向上させるために複数の参照ポイントPRiを用いる。
【0061】
本発明の観点において、参照ポイントPRiのいくつかは、当該参照ポイントPRiが人工衛星Sで撮影されるレーダー画像12に明確に示されるのに十分な自然電磁波反射性能を有さない場合、図2に示すレーダー波反射部材20がそれぞれ配置される。レーダー波反射部材20はそれぞれ、図3に示すように、人工衛星Sの視軸Aに一致するように配置されている。
【0062】
レーダー波反射部材20は、互いに異なる軌道を通る人工衛星の視軸に一致することができるように方向転換可能であるという特徴を有する。レーダー波反射部材20は、傾斜角度及び方位角を調整可能な三面体の形状を有する。本実施形態で用いられる人工衛星は、鉛直方向に対する視軸の角度が23°のENVISATである。
【0063】
ここで、X=(x,y,z)とした場合、上述した干渉計側法の工程によって得られる参照ポイントPRiの生の座標はXB(PRi)、座標の生の変化量はΔBX(PRi)と表わされる。
【0064】
本発明によれば、S110において、参照ポイントの座標の真の変化量ΔRX(PRi)が参照ポイントの真の座標XR(PRi)と決定される。
【0065】
本実施形態において、参照ポイントの座標の真の変化量及び真の座標は、GPS及びトポグラフィのいずれかによって決定される。これらの計側は、定期的(例えば、レーダー画像12が取得される日毎)に行われることが好ましい。トポグラフィは、参照ポイントPRiに照準を合わせた1又は複数のセオドライト22を用いて行ってよい。
【0066】
上記の計側によって、参照ポイントの座標の真の変化量を示すベクトルを算出することが可能となる。
【0067】
調査期間を通して正確に知られている真の座標XR(PRk)及び座標の真の変化量ΔRX(PRk)を有する参照ポイントPRkについては、上記のような定期的な計測は不要である。このような参照ポイントPRkは、通常、レーダー波反射部材20が配置されており、位置変動のない地盤の領域に位置する。
【0068】
その後、S120において、調査ポイントの補正された座標XC(PSi)を算出する。当該工程は、調査ポイントの生の座標XB(PSi)、参照ポイントの生の座標XB(PRi)、及び、参照ポイントの真の座標XR(PRi)に基づいて行われる。
【0069】
上記工程において、調査ポイントの生の座標を補正するのに、参照ポイントが用いられる。ここで、参照ポイントの真の座標、及び、干渉計側法の工程S10で得られる参照ポイントの生の座標は、知られている。参照ポイントの生の座標XB(PRi)と真の座標XR(PRi)との間(例えば移行の際の変化量)で補正値の算出が行われ得る。そして当該補正は全ての参照ポイントの生の座標XB(PSi)に適用され、調査ポイントの補正された座標XC(PSi)が得られる。これにより、調査ポイントの精度を格段に向上させることができる。
【0070】
S130では、調査ポイントの座標の生の変化量ΔBX(PSi)、参照ポイントの座標の生の変化量ΔBX(PRi)、及び、参照ポイントの座標の真の変化量ΔRX(PRi)に基づいて、調査ポイントの座標の補正された変化量ΔCX(PSi)が算出される。
【0071】
上記工程においては、レーダー画像12の最も古いものが取得された時点を、参照時間とする。座標の変化量は、参照時間に対する変化量であり、参照ポイントの1つに関するものである。
【0072】
人工衛星Sで取得されるレーダー画像12について、参照ポイントの真の座標を含む最小二乗法による誤差分布アルゴリズムを実行する。当該アルゴリズムは、2つのレーダー画像間の座標の変化量に適用される。本実施形態において、現時点での補正された座標の変化量を得るための工程S130は、第2のレーダー画像が取得された時点と現時点との間で適用される。ここで、第2のレーダー画像は、参照時間に取得されたレーダー画像の後に取得される。
【0073】
上記算出は、調査ポイントの高度の生の変化量ΔBz(PSi)と参照ポイントの高度の生の変化量ΔBz(PRi)とに基づいて、図3に点線で示されている数学的な表面30を生成することにある。本実施形態において、z以外の2つの座標(x,y)は、地盤の沈下を調査の対象とする限り、無視される。
【0074】
その後、表面30は、上述したアルゴリズムによって、参照ポイントの高度の真の変化量ΔRz(PRi)にできるだけ一致するように変形させることで、最適化される。これにより、調査ポイントの高度の補正された変化量をΔCz(PSi)として、図4に実線で示す補正された表面40が得られる。
【0075】
なお、本発明の範囲を超えない限りは、調査ポイントの他の2つの座標(x,y)についても真の変化量を算出してよい。
【0076】
本発明では、1の調査ポイントPS1の補正された座標の少なくとも1の経時的な変化量を表示する工程S140が行われる。本実施形態では、図5に示すように、地理情報システムの地図C上に、調査ポイントPS1の位置及びその高度の補正された変化量が表示されている。調査ポイントPS1は、補正された座標に基づいて配置されている。
【0077】
図6には、調査ポイントPS1の生の座標に基づく位置が示されている。ここでは、調査ポイントPS1が橋50を外れた水中の不正な位置にあることが分かるであろう。
【0078】
調査ポイントPS1を選択することで、ユーザは、当該調査ポイントPS1の高度の補正された経時的な変化量ΔCz(PS1)のグラフを得ることができる。ユーザが地図C上で素早く視認できるよう、色コードが用いられてよい。調査ポイントの色コードは、現時点で高度の最大の変化量を示す。
【0079】
本発明に係る調査方法は、標準プログラミング言語での指令を含むコンピュータプログラムの形態で提供されることが好ましい。本実施形態において、コンピュータプログラムは、図7に示すコンピュータ62のハードディスク60に記録されている。
【0080】
本発明に係るコンピュータプログラム又はその一部は、リモート・コンピュータによってリモートアクセス可能なサーバに読み込まれてもよい。
【0081】
本発明に係る調査方法によると、トンネル等の地下の土木作業が行われている最中における、いかなる地盤の崩壊をも検知することができる。トンネルの建設で生じる変形は非線形の場合が多く、従来用いられているアルゴリズムは線形回帰に依存するため、上記のような非線形の変形を検知することはできない。
【特許請求の範囲】
【請求項1】
地盤上の複数の調査ポイントの座標の生の変化量、及び、地盤上の少なくとも1の参照ポイントの座標の生の変化量を提供する工程と、
前記参照ポイントの座標の真の変化量を決定する工程と、
前記調査ポイントの座標の生の変化量、前記参照ポイントの座標の生の変化量、及び、前記参照ポイントの座標の真の変化量に基づいて、前記調査ポイントの座標の補正された変化量を算出する工程と、
を備えたことを特徴とする、地盤変化の調査方法。
【請求項2】
前記調査ポイントのうち少なくとも1つの調査ポイントの座標の少なくとも1つについて、補正された経時的な変化量を決定する工程をさらに備えたことを特徴とする、請求項1に記載の調査方法。
【請求項3】
前記調査ポイントのうち少なくとも1つの調査ポイントの座標の少なくとも1つについての前記補正された経時的な変化量が、当該調査ポイントの高度の補正された変化量であることを特徴とする、請求項2に記載の調査方法。
【請求項4】
前記経時的な変化量を表示する表示工程をさらに備えたことを特徴とする、請求項2又は3に記載の調査方法。
【請求項5】
前記表示工程の間、前記調査ポイントのそれぞれの位置と高度の補正された変化量とが、地理情報システムの地図及び衛星地図のいずれかに表示されることを特徴とする、請求項4に記載の調査方法。
【請求項6】
前記調査ポイントの座標の補正された変化量を算出する工程が、連続する2つの時点での前記参照ポイントの生の座標及び真の座標の変化量を用いて行われることを特徴とする、請求項1〜5のいずれか一項に記載の調査方法。
【請求項7】
前記調査ポイントの座標の補正された変化量を算出する工程が、最小二乗法による誤差分布アルゴリズムを実行することを特徴とする、請求項1〜6のいずれか一項に記載の調査方法。
【請求項8】
前記調査ポイントの生の座標、及び、前記参照ポイントの生の座標を提供する工程と、
前記参照ポイントの真の座標を決定する工程と、
前記調査ポイントの生の座標、前記参照ポイントの生の座標、及び、前記参照ポイントの真の座標に基づいて、前記調査ポイントの補正された座標を算出する工程と、
をさらに備えたことを特徴とする、請求項1〜7のいずれか一項に記載の調査方法。
【請求項9】
前記座標の生の変化量及び前記生の座標の少なくともいずれかが、デジタル地形モデル及び少なくとも1のレーダー画像取得装置によって取得された複数のレーダー画像に基づいた干渉計測法による調査によって、導き出されることを特徴とする、請求項8に記載の調査方法。
【請求項10】
前記調査ポイントの少なくとも1つが、前記レーダー画像取得装置に向けられた少なくとも1の電磁波反射部材を含むことを特徴とする、請求項9に記載の調査方法。
【請求項11】
前記参照ポイントの少なくとも1つが、前記レーダー画像取得装置に向けられた少なくとも1の電磁波反射部材を含むことを特徴とする、請求項9又は10に記載の調査方法。
【請求項12】
前記参照ポイントの真の座標が、GPS及びトポグラフィのいずれかによって決定されることを特徴とする、請求項1〜11のいずれか一項に記載の調査方法。
【請求項13】
コンピュータで実行された場合に、請求項1〜12のいずれか一項に記載の調査方法の工程を実行する指令を含むことを特徴とする、コンピュータプログラム。
【請求項14】
コンピュータによって読み取り可能であり、請求項13に記載のコンピュータプログラムが記録されていることを特徴とする、記録媒体。
【請求項15】
地下の土木作業の際に特に生じ易い地盤の非線形の変形を調査するための、請求項1〜12のいずれか一項に記載の調査方法の使用。
【請求項1】
地盤上の複数の調査ポイントの座標の生の変化量、及び、地盤上の少なくとも1の参照ポイントの座標の生の変化量を提供する工程と、
前記参照ポイントの座標の真の変化量を決定する工程と、
前記調査ポイントの座標の生の変化量、前記参照ポイントの座標の生の変化量、及び、前記参照ポイントの座標の真の変化量に基づいて、前記調査ポイントの座標の補正された変化量を算出する工程と、
を備えたことを特徴とする、地盤変化の調査方法。
【請求項2】
前記調査ポイントのうち少なくとも1つの調査ポイントの座標の少なくとも1つについて、補正された経時的な変化量を決定する工程をさらに備えたことを特徴とする、請求項1に記載の調査方法。
【請求項3】
前記調査ポイントのうち少なくとも1つの調査ポイントの座標の少なくとも1つについての前記補正された経時的な変化量が、当該調査ポイントの高度の補正された変化量であることを特徴とする、請求項2に記載の調査方法。
【請求項4】
前記経時的な変化量を表示する表示工程をさらに備えたことを特徴とする、請求項2又は3に記載の調査方法。
【請求項5】
前記表示工程の間、前記調査ポイントのそれぞれの位置と高度の補正された変化量とが、地理情報システムの地図及び衛星地図のいずれかに表示されることを特徴とする、請求項4に記載の調査方法。
【請求項6】
前記調査ポイントの座標の補正された変化量を算出する工程が、連続する2つの時点での前記参照ポイントの生の座標及び真の座標の変化量を用いて行われることを特徴とする、請求項1〜5のいずれか一項に記載の調査方法。
【請求項7】
前記調査ポイントの座標の補正された変化量を算出する工程が、最小二乗法による誤差分布アルゴリズムを実行することを特徴とする、請求項1〜6のいずれか一項に記載の調査方法。
【請求項8】
前記調査ポイントの生の座標、及び、前記参照ポイントの生の座標を提供する工程と、
前記参照ポイントの真の座標を決定する工程と、
前記調査ポイントの生の座標、前記参照ポイントの生の座標、及び、前記参照ポイントの真の座標に基づいて、前記調査ポイントの補正された座標を算出する工程と、
をさらに備えたことを特徴とする、請求項1〜7のいずれか一項に記載の調査方法。
【請求項9】
前記座標の生の変化量及び前記生の座標の少なくともいずれかが、デジタル地形モデル及び少なくとも1のレーダー画像取得装置によって取得された複数のレーダー画像に基づいた干渉計測法による調査によって、導き出されることを特徴とする、請求項8に記載の調査方法。
【請求項10】
前記調査ポイントの少なくとも1つが、前記レーダー画像取得装置に向けられた少なくとも1の電磁波反射部材を含むことを特徴とする、請求項9に記載の調査方法。
【請求項11】
前記参照ポイントの少なくとも1つが、前記レーダー画像取得装置に向けられた少なくとも1の電磁波反射部材を含むことを特徴とする、請求項9又は10に記載の調査方法。
【請求項12】
前記参照ポイントの真の座標が、GPS及びトポグラフィのいずれかによって決定されることを特徴とする、請求項1〜11のいずれか一項に記載の調査方法。
【請求項13】
コンピュータで実行された場合に、請求項1〜12のいずれか一項に記載の調査方法の工程を実行する指令を含むことを特徴とする、コンピュータプログラム。
【請求項14】
コンピュータによって読み取り可能であり、請求項13に記載のコンピュータプログラムが記録されていることを特徴とする、記録媒体。
【請求項15】
地下の土木作業の際に特に生じ易い地盤の非線形の変形を調査するための、請求項1〜12のいずれか一項に記載の調査方法の使用。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2012−533744(P2012−533744A)
【公表日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2012−521078(P2012−521078)
【出願日】平成22年7月7日(2010.7.7)
【国際出願番号】PCT/FR2010/051425
【国際公開番号】WO2011/010042
【国際公開日】平成23年1月27日(2011.1.27)
【出願人】(509167338)
【氏名又は名称原語表記】SOLETANCHE FREYSSINET
【住所又は居所原語表記】133 Boulevard National,92500 RUEIL MALMAISON,France
【Fターム(参考)】
【公表日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願日】平成22年7月7日(2010.7.7)
【国際出願番号】PCT/FR2010/051425
【国際公開番号】WO2011/010042
【国際公開日】平成23年1月27日(2011.1.27)
【出願人】(509167338)
【氏名又は名称原語表記】SOLETANCHE FREYSSINET
【住所又は居所原語表記】133 Boulevard National,92500 RUEIL MALMAISON,France
【Fターム(参考)】
[ Back to top ]