
地盤改良工法
【課題】必要な作業者の数を低減することによりコストの低減を図る地盤改良工法を提供することを目的とする。
【解決手段】地盤改良工法では、混合攪拌機4とケーシング部3とベースマシン2とを備え、傾斜計7がケーシング部3に設けられ、距離測定器11がベースマシン2に設けられた地盤改良施工機1を使用する。地盤改良工法では、混合攪拌機4を施工区分C1に配置して、傾斜計7の測定した傾斜に基づきケーシング部3を鉛直にした後、距離測定器11がケーシング部3及び距離測定器11の間の距離を測定して、測定した距離を初期値Lとする。さらに、ケーシング部3及び混合攪拌機4の地盤への貫入又は地盤からの引き抜きの際、ケーシング部3が傾斜した場合、ケーシング部3を鉛直にすると共に、ケーシング部3及び距離測定器11の間の距離を初期値Lに合わせることによって、ケーシング部3の位置を調整する。
【解決手段】地盤改良工法では、混合攪拌機4とケーシング部3とベースマシン2とを備え、傾斜計7がケーシング部3に設けられ、距離測定器11がベースマシン2に設けられた地盤改良施工機1を使用する。地盤改良工法では、混合攪拌機4を施工区分C1に配置して、傾斜計7の測定した傾斜に基づきケーシング部3を鉛直にした後、距離測定器11がケーシング部3及び距離測定器11の間の距離を測定して、測定した距離を初期値Lとする。さらに、ケーシング部3及び混合攪拌機4の地盤への貫入又は地盤からの引き抜きの際、ケーシング部3が傾斜した場合、ケーシング部3を鉛直にすると共に、ケーシング部3及び距離測定器11の間の距離を初期値Lに合わせることによって、ケーシング部3の位置を調整する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、地盤改良工法に係り、特にショベル系の掘削機をベースマシンとして、このベースマシンのアーム先端に混合攪拌機を取り付けた地盤改良装置を使用する地盤改良工法に関する。
【背景技術】
【0002】
改良対象地盤を固化処理する地盤改良工法において、改良対象地盤を掘削しながら地盤改良材である固化材スラリーを吐出し、改良対象地盤の土壌と固化材スラリーとを混合攪拌することによって固化処理を行なうものがある。上述の地盤改良を実施する地盤改良装置の中で、地表から深度10m程度までを対象として、バックホウ等のショベル系の掘削機をベースマシンとし、このベースマシンのアーム先端に混合攪拌機を取り付けた地盤改良装置がある。そして、この地盤改良装置では、混合攪拌機は改良対象地盤に対して略垂直に貫入された後、引き抜かれ、貫入又は引き抜きの際に改良対象地盤が改良される。さらに、この貫入及び引き抜きを繰り返して、改良対象地盤内に連続した改良体が造成される。
【0003】
特許文献1には、ショベル系の掘削機であるベースマシンのアーム先端に、上下方向に周回移動するチェーン式の混合攪拌翼を備えた混合攪拌ヘッドを装着した地盤改良機械が記載されている。さらに、特許文献1には、この地盤改良機械を使用して、複数の連続した改良体を施工することにより改良壁体を構築する地盤改良方法が記載されている。
【0004】
上述の地盤改良方法では、改良壁体を構築する方向とベースマシンの走行方向とがほぼ平行になるようにベースマシンがセットされる。ベースマシンは、非走行状態で、混合攪拌ヘッドを作動させて、アームの操作により混合攪拌ヘッドを地中に貫入する。所定の深度まで混合攪拌ヘッドを貫入後、ベースマシンは、混合攪拌ヘッドを停止して、アームを旋回させながら改良壁体の長手方向と平行に所定量だけ走行する。そして、ベースマシンは、混合攪拌ヘッドを再び作動させ、アームを改良壁体の構築方向に所定量だけ旋回させることにより、混合攪拌ヘッドが改良壁体の構築方向に向かって掘進しつつ改良対象地盤を改良する。さらに、アームの旋回完了後、ベースマシンは、上述と同様にして、改良壁体の長手方向と平行に所定量だけ走行する。このように、アームの旋回による混合攪拌ヘッドの掘進工程(非走行掘進工程)及びベースマシンの走行工程(非掘進走行工程)を交互かつ連続的に繰り返すことによって、改良壁体が構築される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−307675号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1の地盤改良機械のように、混合攪拌ヘッドを地盤に貫入した状態でアームを旋回させて混合攪拌ヘッドで掘進しつつ地盤改良するのではなく、地盤改良箇所毎に混合攪拌ヘッドの貫入・引き抜きを行なって地盤改良する場合、地盤改良箇所毎で混合攪拌ヘッドの地盤改良箇所への位置合わせが必要になる。そして、ベースマシンのアームを動作させることによって混合攪拌ヘッドの位置が変化し、さらに、地盤改良箇所が変わるとベースマシンの移動が必要になることから、ベースマシンのオペレータの視線方向の混合攪拌ヘッドの位置が明確に把握できず、混合攪拌ヘッドの地盤改良箇所への位置合わせは、オペレータのみでは行なうことができない。このため、混合攪拌ヘッドの位置を観測しオペレータに通知して混合攪拌ヘッドを誘導する観測者が必要となる。
よって、地盤改良箇所が変わる毎に観測者による混合攪拌ヘッドの位置の誘導が必要になるため、地盤改良の施工中のほとんどの時間においてこの観測が必要となり、観測者は専属となる。従って、1つのベースマシンに対して、少なくとも1人の専属の観測者を必要とするため、コストが上昇するという問題がある。
【0007】
この発明はこのような問題点を解決するためになされたものであり、必要な作業者の数を低減することによりコストの低減を図る地盤改良工法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、この発明に係る地盤改良工法は、土及び固化材を混合攪拌すると共に掘削可能な混合攪拌機と、混合攪拌機が取り付けられた細長のケーシング部と、ケーシング部が可動なアームに取り付けられたベースマシンとを備える地盤改良装置による地盤改良工法において、ケーシング部には、ケーシング部の傾斜を測定する傾斜計が設けられ、ベースマシンには、ケーシング部との間の距離を測定する距離測定器が設けられており、a)混合攪拌機を第一の地盤改良箇所に配置し、傾斜計の測定した傾斜に基づきケーシング部を鉛直にするステップと、b)距離測定器がケーシング部及び距離測定器の間の距離を測定し、測定した距離を初期値とするステップと、c)ケーシング部及び混合攪拌機を所定の深度まで地盤に貫入させるステップと、d)ケーシング部及び混合攪拌機を所定の深度まで貫入後、地盤より引き抜くステップと、e)ステップc)またはd)において、ケーシング部が鉛直な状態から傾斜した際、傾斜計の測定した傾斜に基づきケーシング部を鉛直にすると共に、距離測定器の測定した距離に基づきケーシング部及び距離測定器の間の距離を初期値に合わせることによって、ケーシング部の位置を調整するステップと、f)ステップc)またはd)において、ケーシング部及び混合攪拌機の地盤への貫入から引き抜きまでの間に、混合攪拌機に固化材を供給し、混合攪拌機により固化材及び土を混合攪拌するステップとを含む。
【0009】
これにより、ケーシング部及び距離測定器の間を測定した距離の値をその初期値に設定した後、ベースマシンのオペレータは、ケーシング部の鉛直な状態からの傾斜、並びにケーシング部及び距離測定器の間の距離を確認しながら、ケーシング部の位置を所定の位置に調整しつつ、地盤改良を行なうことができる。よって、地盤改良の施工中は、地盤改良箇所にケーシング部の位置調整のための誘導者が不要になるため、必要な作業者の数を低減してコストの低減を図ることが可能である。
【0010】
地盤改良工法において、第一の地盤改良箇所から第二の地盤改良箇所に移動する際、ベースマシンが、第一の地盤改良箇所から第二の地盤改良箇所へ向かう方向と平行に移動し、混合攪拌機を第二の地盤改良箇所に配置するために、傾斜計の測定した傾斜に基づきケーシング部を鉛直にすると共に、距離測定器の測定した距離に基づきケーシング部及び距離測定器の間の距離を初期値に合わせてもよい。これにより、混合攪拌機の第一の地盤改良箇所から第二の地盤改良箇所への配置は、ベースマシンのオペレータのみで可能であるため、必要な作業者の数を低減してコストの低減を図ることが可能である。
【0011】
ケーシング部が鉛直な状態から傾斜した際、混合攪拌機の攪拌動作を緩やかにして、ケーシング部の位置を調整してもよい。ケーシング部の傾斜は、混合攪拌機が障害物に接触することや、混合攪拌機の貫入時に地盤の土質が変化すること等によって生じる。混合攪拌機の攪拌動作を緩やかにすることによって、障害物や周囲の土から混合攪拌機が受ける力が低減されるため、ケーシング部の位置の調整が容易になる。
距離測定器は超音波式であってもよい。超音波式の距離測定器は、安価でありコストを低減できる。さらに、超音波式の距離測定器は、対象物の材質に関係なく安定した測定が可能であり、また、明暗の影響を受けにくい。
距離測定器はレーザー式であってもよい。レーザー光線は、その広がりが小さい。このため、レーザー光線による距離測定は、その測定点は小さくなるので、正確な距離測定を行なうことができる。
【発明の効果】
【0012】
この発明に係る地盤改良工法によると、必要な作業者の数を低減することによりコストを低減させることが可能になる。
【図面の簡単な説明】
【0013】
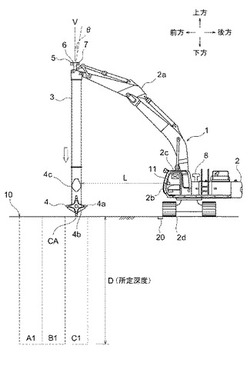
【図1】この発明の実施の形態に係る地盤改良施工機の構成を示すものであって、地盤改良施工機を動作させる前の状態を示す模式側面図である。
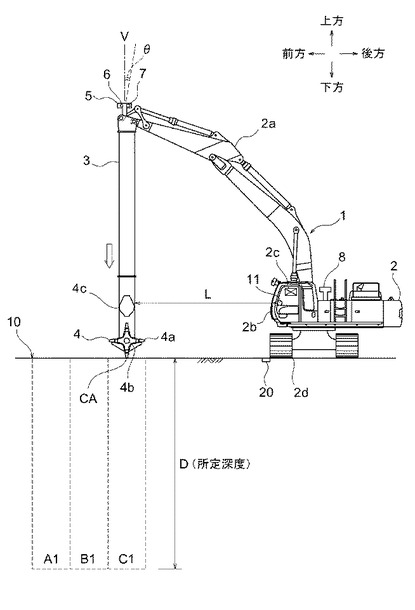
【図2】図1の地盤改良施工機が動作している状態を示す模式側面図である。
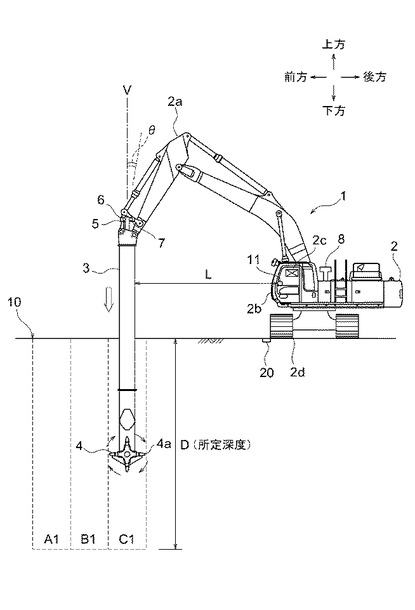
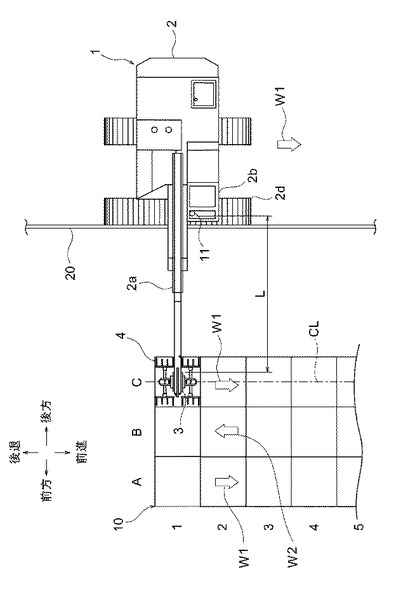
【図3】図1及び2の地盤改良施工機の状態を示す模式平面図である。
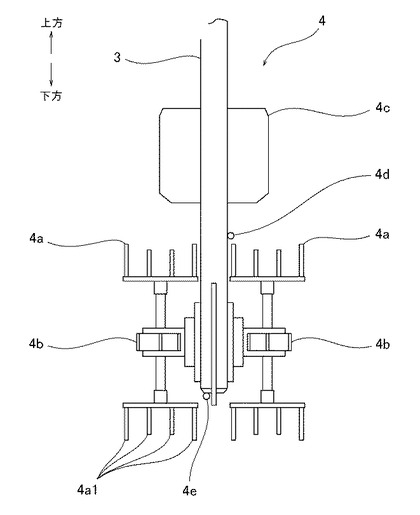
【図4】図1の攪拌機を後方側から前方側に向かって見た拡大模式側面図である。
【発明を実施するための形態】
【0014】
以下、この発明の実施の形態について添付図面に基づいて説明する。
実施の形態
図1及び4を用いて、この発明の実施の形態に係る地盤改良施工機1の構成を説明する。なお、以下の実施形態において、ベースマシンとしてショベル系の掘削機であるバックホウを使用した場合の例について説明する。
【0015】
図1を参照すると、地盤改良装置である地盤改良施工機1は、重量が45t級のベースマシン2を備えている。ベースマシン2はアーム2aを有しており、アーム2aの先端部には、矩形断面を有し且つ細長の筒状部材からなるケーシング部3の一端が取り付けられている。ケーシング部3の他端には、混合攪拌機4(以下、攪拌機4と略称する)が取り付けられており、攪拌機4が、ケーシング部3を介してベースマシン2のアーム2aに垂下された状態となっている。
【0016】
図1及び図4を合わせて参照すると、攪拌機4は、ケーシング部3を両側から挟むようにして2つの略十字形状をした攪拌翼4aを回転可能に有し、ケーシング部3の内部に攪拌翼4aを駆動するためのモータ4cを有している。攪拌機4すなわちモータ4cは、ベースマシン2の操縦室2bでの操作によって動作させることができ、モータ4cが駆動することによって攪拌翼4aはその回転軸4bを中心に回転する。さらに、攪拌翼4aには、攪拌爪4a1が複数設けられており、攪拌翼4aは、回転することによって地盤を掘削・攪拌することができる。さらに、攪拌機4には、攪拌翼4aの近傍における回転軸4bを挟んだ上下に地盤の固化材である固化材スラリーを吐出するための吐出口として、上部吐出口4d及び下部吐出口4eが設けられている。上部吐出口4d及び下部吐出口4eには、ベースマシン2とは別に設けられた固化材スラリーの製造プラントで製造された固化材スラリーが供給されるようになっている。よって、攪拌機4は、攪拌翼4aを回転させつつ固化材スラリーを吐出することによって、攪拌翼4aにより掘削されてほぐされた地盤の土と固化材スラリーとを混合攪拌し、改良対象とする地盤の土質を改良して向上させる。そして、上述に示す攪拌機4は、回転する攪拌翼4aによって地盤改良を行なうため、ロータリー式混合攪拌機と称される。
【0017】
また、図1を参照すると、ケーシング部3におけるアーム2aとの接続部側となる端部には、支持部材5が設けられており、支持部材5には、ヘッドタンク6及び傾斜計7が設けられている。さらに、ベースマシン2の安定した車体には、圧力センサ8が設けられている。圧力センサ8は、アーム2aに沿って設けられた図示しない導圧管を介してヘッドタンク6に連結されており、ヘッドタンク6との水頭差を測定することができる。また、傾斜計7は、例えば、市販のサーボ方式重力加速度検出タイプが使用される。
【0018】
圧力センサ8及び傾斜計7は、ケーブルを介して、操縦室2bに設けられた表示モニタ2cに接続されている。表示モニタ2cには、圧力センサ8からヘッドタンク6及び圧力センサ8の水頭差を示す信号が送られ、傾斜計7から傾斜計7の傾斜角度を示す信号が送られる。表示モニタ2cは、圧力センサ8から送られる信号から、ベースマシン2に対する支持部材5の相対位置を算出し、この算出結果から、攪拌機4の位置を算出することによって掘削深度を算出して表示する。また、表示モニタ2cは、傾斜計7から送られる信号から、ケーシング部3の軸方向である長手方向の、鉛直方向Vに対する前後方向への傾斜角度θを計算して表示する。なお、表示モニタ2cには、測定・算出された掘削深度及びケーシング部3の傾斜角度θが、刻々とリアルタイムで表示され続ける
【0019】
また、ベースマシン2の操縦室2bには、超音波を使用して対象物までの距離を測定する超音波式の距離測定器11が設けられている。距離測定器11は、ベースマシン2が水平な地盤に設けられている場合に、超音波を水平な前方方向、すなわちケーシング部3に向けて水平な方向に発信し、ケーシング部3におけるベースマシン2側の面と距離測定器11との距離、すなわち、ケーシング部3と距離測定器11との距離を測定するように配置されている。よって、距離測定器11は、ケーシング部3と距離測定器11との水平距離を測定する。
【0020】
距離測定器11は、操縦室2bのオペレータが、距離測定器11に設けられた測距開始ボタンを押すことによって、超音波を発信して対象物までの距離を測定し、測定距離を表示する。距離測定器11は、測定開始ボタンを押すとそれ以降継続的に測距し続け、測定された対象物までの距離は、刻々とリアルタイムで表示され続ける。また、上述に示すように、ケーシング部3の傾斜角度θも、傾斜計7の検出により表示モニタ2cにリアルタイムで表示され続けている。
このように、ケーシング部3の傾斜角度θと、ケーシング部3と距離測定器11との距離すなわちケーシング部3の水平方向の位置とを操縦室2bのオペレータが常時リアルタイムで把握できることによって、ケーシング部3の定位置での鉛直な貫入が可能になる。また、場合によっては、距離測定器11の測距開始ボタンをON(測距開始)及びOFF(測距停止)することによって、ケーシング部3と距離測定器11との距離を一時的に計測し、この一時的な計測を必要に応じて行なうようにしてもよい。
【0021】
超音波式の距離測定器11は、例えば、バイモルフ振動子を使用したものが利用できる。バイモルフ振動子は、2つの圧電セラミックが分極方向を互いに逆にした状態で張り合わされたものであり、電圧が印加されることによって、一方の圧電セラミックが伸び、他方の圧電セラミックが縮むようにして動作する。
そして、距離測定器11は、送信部と受信部とを有しており、送信部及び受信部のそれぞれにバイモルフ振動子が設けられている。
【0022】
送信部では、バイモルフ振動子は、高周波の電圧が印加されると、電圧の極性に応じて2つの圧電セラミックが伸張動作と収縮動作とを繰り返すことによって、振動し超音波を発生する。なお、バイモルフ振動子に印加される電圧の周波数であるパルスは、例えば40kHz(キロヘルツ)のパルスにタイミングパルスを加えたものとなっている。
また、受信部では、バイモルフ振動子は、送信部が発信した超音波が対象物に反射して戻ってきたものを受信し、さらに、受信した超音波のパルスに応じて振動し、交番電流を発生する。
そして、距離測定器11は、送信部から発信されるタイミングパルスを含む超音波のパルスと、受信部で発生した交番電流のパルスとから、距離測定器11と対象物との距離を算出する。
【0023】
なお、距離測定器11は、最大測定距離が12〜18m(メートル)、発信する超音波の周波数が40kHz(キロヘルツ)、測定精度が測定距離の±(プラスマイナス)1%の誤差以内、最小測定単位1cm(センチメートル)、1回の測定動作での測定に要する時間が2秒以内であるものが好ましい。なお、超音波の伝播速度は、超音波が伝播する空間の空気の温度によって変化するため、距離測定器11で受信する超音波のパルスは、超音波が伝播する空間の空気の温度によって変化する。よって、距離測定器11は、温度に応じた超音波の伝播速度の補正を自動的に行なう機能を有するものが好ましい。
【0024】
次に、この発明の実施の形態に係る地盤改良施工機1による地盤改良の方法を説明する。
図3を参照すると、地盤改良を行なうエリアは、矩形状をした施工箇所10で示される。施工箇所10は、攪拌機4の形状に合わせて格子状に区分されており、列部分をA〜Cの3つの列に区分され、さらに、各列を行部分1、2、3、4、5・・・・・・に区分されている。よって、各施工区分は矩形状になっており、各施工区分の境界は、ベースマシン2のオペレータ及び施工場所の作業者から目視できるように、消石灰等による白いラインで明示されている。
【0025】
そして、詳細は後述するが、各施工区分においてケーシング部3と共に攪拌機4を鉛直下方向に地盤に貫入させて地盤改良が行なわれる。
また、各施工区分に対する施工の順序について、列部分の施工は、列A、B、Cの順で行なわれ、各列部分、例えば、列部分Aでは、施工区分A1、A2、A3・・・・・・の順で方向W1に向かって行なわれる。さらに、列部分Aの施工完了後、列部分Bの施工が行なわれる。このとき、列部分Bでの施工は、方向W1と反対の方向W2に向かって進められる。そして、列部分Bの施工完了後、列部分Cの施工が、施工区分C1から方向W1に向かって進められる。また、図1に示すように、各施工区分における地盤改良は、地盤表面から深度Dまで行なわれる。なお、45t級のベースマシン2を使用した場合、深度Dは11m(メートル)程度以下である。
よって、すべての施工区分の地盤改良を行なうことによって、施工箇所10では、施工箇所10の全体にわたる連続した改良体が形成される。
【0026】
ここで、第一の地盤改良箇所である施工区分C1における地盤改良施工機1による地盤改良の方法を説明する。
図1を参照すると、施工箇所10における施工区分C1の近傍に地盤改良施工機1のベースマシン2がセットされる。この際、操縦室2bのオペレータは、施工場所に配置された合図者の誘導により、ケーシング部3を介してアーム2aに垂下させた状態の攪拌機4が施工区分C1の上方に位置するようにベースマシン2の位置決めを行なう。このとき、図3を参照すると、ベースマシン2は、クローラ2dの長手方向である走行方向が、施工箇所10の列Cの長手方向、すなわち、施工区分C1、C2、C3・・・・・・の中心である杭芯を結ぶ線CLと平行になるように配置されている。
【0027】
さらに、図1を参照すると、操縦室2bのオペレータは、施工場所に配置された合図者の誘導により、アーム2aを操作して、攪拌機4の中心の位置と施工区分C1の杭芯CAの位置とを合わせるようにして攪拌機4を施工区分C1内に配置し、さらに、表示モニタ2cに表示されるケーシング部3の長手方向の傾斜角度θを確認しながら、傾斜角度θが0度となるように、すなわちケーシング部3の長手方向が鉛直方向Vになるようにケーシング部3の位置決めを行なう。
ベースマシン2及びケーシング部3の位置決めが完了すると、クローラ2dにおける施工箇所10側の側部に沿って、列Cの長手方向すなわち線CLと平行に、消石灰等による白いライン20が引かれる。(図3参照)
【0028】
さらに、操縦室2bのオペレータにより、距離測定器11が作動される。距離測定器11は、鉛直方向Vに直立したケーシング部3と距離測定器11との距離を測定し、測定した距離の値を初期値Lとして記憶する。
そして、上述に示す一連の動作を完了することによって、施工区分C1への地盤改良施工機1のセットが完了する。
【0029】
地盤改良施工機1のセット完了後、操縦室2bのオペレータは、攪拌機4を動作させ、さらに、アーム2aを操作することによって、攪拌翼4aを回転させている攪拌機4を地盤に貫入する。
攪拌機4は、アーム2aによって下方に押しつけられることにより、回転する攪拌翼4aが地盤をほぐしつつ、下方に掘進する。このとき、操縦室2bのオペレータは、表示モニタ2cに表示されるケーシング部3の傾斜角度θを確認しながら、アーム2aを操作する。
【0030】
図2を参照すると、攪拌機4が地中に貫入されると、オペレータは、攪拌翼4aを回転させたまま攪拌機4の下部吐出口4e(図4参照)から固化材スラリーを吐出させる。これにより、吐出された固化材スラリーが、攪拌機4の周辺の土と混合・攪拌される。
ここで、固化材スラリーと改良対象地盤の土との混合攪拌状況について説明する。固化材スラリーと改良対象地盤の土との混合攪拌は、事前に行なった固化材スラリーと改良対象土との配合試験等で予め決定された固化材添加量となるように、所定深度Dまでの間において攪拌機4を所定の一定の速度で貫入させながら、固化材スラリーを所定の流量で連続して吐出して、行なわれる。それによって、攪拌機4は、単位時間当たりの攪拌機4の貫入距離に攪拌機4の平面積すなわち攪拌機4の水平方向の攪拌領域の面積を掛けて算出される土量の土と、所定の流量で単位時間当たりに地盤中に供給された量の固化材スラリーとを、単位時間当たりに混合・攪拌する。
【0031】
また、攪拌翼4aを回転させつつ攪拌機4を地盤に貫入させていく過程で、地盤の土質の変化や地盤に存在する障害物との接触等の影響により攪拌翼4aに加わる力が変化すると、攪拌機4が水平方向に移動することがある。このとき、ケーシング部3の傾斜角度θが変化するが、表示モニタ2cに表示されるケーシング部3の傾斜角度θが所定の範囲を超えた場合、操縦室2bのオペレータは、攪拌機4の攪拌翼4aの回転数を下げ、そして、アーム2aによるケーシング部3の貫入を停止するか又はケーシング部3の貫入速度を低下させ、距離測定器11を作動させてケーシング部3と距離測定器11との距離を測定する。ここで、攪拌機4の攪拌翼4aの回転数を下げること、ケーシング部3の貫入を停止すること、又は、ケーシング部3の貫入速度を低下させることは、攪拌機4の攪拌動作を緩めることである。
【0032】
オペレータは、ケーシング部3の傾斜角度θと、距離測定器11により測定された距離及び距離の初期値Lの差とからケーシング部3の状態を把握する。そして、オペレータは、アーム2aを操作して、ケーシング部3の長手方向が傾斜角度θを0度すなわち鉛直となり、ケーシング部3と距離測定器11との距離の測定値が初期値Lと同一になるように、ケーシング部3の位置修正を行なう。なお、攪拌機4の攪拌翼4aの回転数を下げることによって、攪拌翼4aが地盤や地盤に存在する障害物等から受ける力を低減することができ、また、攪拌翼4aを回転させておくことによって、周囲の土を緩め、ケーシング部3の位置修正を容易にすることが可能である。
【0033】
オペレータは、ケーシング部3の位置を修正し、ケーシング部3の傾斜角度θが0度であり、且つケーシング部3と距離測定器11との距離が初期値Lと同一であることを確認後、攪拌機4の攪拌翼4aの回転数を再び上昇させ、アーム2aを操作してケーシング部3及び攪拌機4の地盤への貫入速度をケーシング部3の位置修正前の速度である当初の設定速度に戻して、貫入を続ける。そして、オペレータは、表示モニタ2cに表示される掘削深度が所定深度Dになると、アーム2aの貫入を停止させ、固化材スラリーの吐出を停止し、そのままの位置(最下端位置)で先端処理として攪拌翼4aの回転を続ける。この先端処理が終了すると、オペレータは、アーム2aを操作して、攪拌翼4aを回転させたままケーシング部3及び攪拌機4を上方に引き上げる。
【0034】
ケーシング部3及び攪拌機4を引き上げる際、オペレータは、表示モニタ2cに表示されるケーシング部3の傾斜角度θを確認しながら、ケーシング部3の長手方向が鉛直方向Vを維持するようにして引き上げを行なう。そして、攪拌機4が地表に引き上げられると、施工区分C1の地盤改良が完了する。
上述に示すように、固化材スラリーと土とを混合攪拌しつつ攪拌機4を所定深度Dまで貫入することによって、施工区分C1は、深度D全体にわたって地盤改良が行なわれる。
【0035】
図3を参照すると、施工区分C1の地盤改良の完了後、オペレータは、第二の地盤改良箇所である施工区分C2の地盤改良を行なうために、ベースマシン2をライン20に沿って方向W1に移動させる。ベースマシン2の移動は、ベースマシン2のアーム2aを旋回させずに行なわれ、そして、施工区分C1からC2への方向と平行、すなわち、施工区分C1及びC2の杭芯同士を結ぶ線CLと平行に行なわれる。このため、オペレータは、施工箇所10に引かれた施工区分C2を明示するライン20を確認しながら、攪拌機4の前後方向の位置をアーム2aにより調整し、且つ攪拌機4の前進後退方向の位置をクローラ2dの移動により調整することによって、攪拌機4を施工区分C2の上方に位置するように移動させる。さらに、オペレータは、表示モニタ2cに表示されるケーシング部3の傾斜角度θ(図1参照)が0度となるように、そして、距離測定器11によりケーシング部3と距離測定器11との距離を測定して、その測定値が初期値Lと同一になるように、アーム2aを操作して、ケーシング部3及び攪拌機4の位置を微調整する。
【0036】
オペレータは、ケーシング部3及び攪拌機4が所定の位置となったことを確認後、攪拌機4を作動させて、施工区分C2の地盤改良の施工を開始する。その後の動作は、施工区分C1と同様にして行なわれる。
上述のように各施工区分において同様の動作を繰り返すことによって、施工区分C2、C3、C4、C5・・・・・・の地盤改良が、地盤改良施工機1によって、順次行なわれていく。
【0037】
このように、この発明に係る地盤改良施工機1であって、土及び固化材スラリーを混合攪拌すると共に掘削可能な混合攪拌機4と、混合攪拌機4が取り付けられた細長のケーシング部3と、ケーシング部3が可動なアーム2aに取り付けられたベースマシン2とを備える地盤改良施工機1によれば、ケーシング部3には、ケーシング部3の傾斜を測定する傾斜計7が設けられ、ベースマシン2には、ケーシング部3との間の距離を測定する距離測定器11が設けられており、
a)混合攪拌機4を第一の地盤改良箇所である施工区分C1に配置し、傾斜計7の測定した傾斜に基づきケーシング部3を鉛直にするステップと、
b)距離測定器11がケーシング部3及び距離測定器11の間の距離を測定し、測定した距離を初期値Lとするステップと、
c)ケーシング部3及び混合攪拌機4を所定の深度Dまで地盤に貫入させるステップと、
d)ケーシング部3及び混合攪拌機4を所定の深度Dまで貫入後、地盤より引き抜くステップと、
e)ステップc)またはd)において、ケーシング部3が鉛直な状態から傾斜した際、傾斜計7の測定した傾斜に基づきケーシング部3を鉛直にすると共に、距離測定器11の測定した距離に基づきケーシング部3及び距離測定器11の間の距離を初期値Lに合わせることによって、ケーシング部3の位置を調整するステップと、
f)ステップc)またはd)において、ケーシング部3及び混合攪拌機4の地盤への貫入から引き抜きまでの間に、混合攪拌機4に固化材スラリーを供給し、混合攪拌機4により固化材スラリー及び土を混合攪拌するステップとを行なうことにより地盤改良工法を行なうことができる。
【0038】
これによって、ケーシング部3及び距離測定器11の間を測定した距離を距離の初期値Lに設定した後、ベースマシン2のオペレータは、ケーシング部3の鉛直な状態からの傾斜、並びにケーシング部3及び距離測定器11の間の距離を確認しながら、ケーシング部3の位置を所定の位置に調整しつつ、地盤改良を行なうことができる。よって、地盤改良の施工中は、地盤改良箇所にケーシング部3の位置調整のための誘導者が不要になるため、必要な作業者の数を低減してコストの低減を図ることが可能である。
【0039】
また、第一の地盤改良箇所である施工区分C1から第二の地盤改良箇所である施工区分C2に移動する際、ベースマシン2が、施工区分C1から施工区分C2へ向かう方向と平行に移動し、混合攪拌機4を施工区分C2に配置するために、傾斜計7の測定した傾斜に基づきケーシング部3を鉛直にすると共に、距離測定器11の測定した距離に基づきケーシング部3及び距離測定器11の間の距離を初期値Lに合わせている。これによって、混合攪拌機4の施工区分C1から施工区分C2への配置は、ベースマシン2のオペレータのみで可能であるため、必要な作業者の数を低減してコストの低減を図ることが可能である。
【0040】
また、ケーシング部3が鉛直な状態から傾斜した際、混合攪拌機4の攪拌動作を緩やかにして、ケーシング部3の位置を調整する。ケーシング部3の傾斜は、混合攪拌機4が障害物に接触することや、混合攪拌機4の貫入時に地盤の土質が変化すること等によって生じる。混合攪拌機4の攪拌動作を緩やかにすることによって、障害物や周囲の土から混合攪拌機4が受ける力が低減されるため、ケーシング部3の位置の調整が容易になる。
また、距離測定器11は超音波式であるが、超音波式の距離測定器は、安価でありコストを低減できる。さらに、超音波式の距離測定器は、対象物の材質に関係なく安定した測定が可能であり、また、明暗の影響を受けにくい。
【0041】
また、実施の形態では、距離測定器11として、超音波式の距離測定器を使用していたが、レーザー光線を使用して対象物までの距離を測定するレーザー式の距離測定器を使用することもできる。レーザー式の距離測定器としては、例えば、最大測定距離50m程度、測定精度±1.5mm程度、最小表示単位0.1mm程度、応答時間0.2秒程度で、光源として620〜690nm(ナノメートル)程度の波長の光を放出するレーザーダイオードを持ち、10m先のレーザースポット径が8mm程度のレーザー距離センサが挙げられる。このようなレーザー距離センサは、例えば、RS−232Cのコネクタ等の出力機構を備え、表示モニタ2cのような周辺機器に接続することによって常時リアルタイムに距離表示できることが好ましい。なお、レーザー光線は、レーザー距離センサの10m先のレーザースポット径が8mm程度であるように、その広がりが小さい。このため、レーザー光線による距離測定は、その測定点が小さいので、正確な距離測定を行なうことができる。さらに、レーザー光線を使用した距離測定器は、レーザー光線を全て吸収する又は全反射するような対象物以外に使用することができるため、ケーシング部3に対して直接距離を測定することができる。
【0042】
また、実施の形態では、ケーシング部3及び攪拌機4を地盤に貫入する時にのみ、固化材スラリーを地中に吐出していたが、これに限定されるものでない。ケーシング部3及び攪拌機4を地盤から引き上げる際にも、固化材スラリーを地中に吐出してもよい。この場合、固化材スラリーの吐出口を下部吐出口4eから上部吐出口4dに切り替える必要がある。固化材スラリーの吐出時期及び吐出量は、改良対象となる地盤の土質や改良目標強度等によって決定される。
また、ベースマシン2の安定した箇所にさらに傾斜計を設けることによって、ベースマシン2の傾斜角度を検出するようにしてもよい。ベースマシン2が傾斜している場合、ケーシング部3と距離測定器11との間の距離が距離測定器11により水平距離ではなく斜距離として測定されるが、この測定された斜距離を、ベースマシン2の傾斜角度に応じて、水平距離に補正するようにしてもよい。これにより、より精度の高いケーシング部3の位置管理が可能になる。
【符号の説明】
【0043】
1 地盤改良施工機(地盤改良装置)、2 ベースマシン、2a アーム(ベースマシンのアーム)、3 ケーシング部、4 混合攪拌機、7 傾斜計、11 距離測定器、C1 施工区分(第一の地盤改良箇所)、C2 施工区分(第二の地盤改良箇所)、D 深度(所定の深度)、L 初期値(測定した距離の初期値)。
【技術分野】
【0001】
この発明は、地盤改良工法に係り、特にショベル系の掘削機をベースマシンとして、このベースマシンのアーム先端に混合攪拌機を取り付けた地盤改良装置を使用する地盤改良工法に関する。
【背景技術】
【0002】
改良対象地盤を固化処理する地盤改良工法において、改良対象地盤を掘削しながら地盤改良材である固化材スラリーを吐出し、改良対象地盤の土壌と固化材スラリーとを混合攪拌することによって固化処理を行なうものがある。上述の地盤改良を実施する地盤改良装置の中で、地表から深度10m程度までを対象として、バックホウ等のショベル系の掘削機をベースマシンとし、このベースマシンのアーム先端に混合攪拌機を取り付けた地盤改良装置がある。そして、この地盤改良装置では、混合攪拌機は改良対象地盤に対して略垂直に貫入された後、引き抜かれ、貫入又は引き抜きの際に改良対象地盤が改良される。さらに、この貫入及び引き抜きを繰り返して、改良対象地盤内に連続した改良体が造成される。
【0003】
特許文献1には、ショベル系の掘削機であるベースマシンのアーム先端に、上下方向に周回移動するチェーン式の混合攪拌翼を備えた混合攪拌ヘッドを装着した地盤改良機械が記載されている。さらに、特許文献1には、この地盤改良機械を使用して、複数の連続した改良体を施工することにより改良壁体を構築する地盤改良方法が記載されている。
【0004】
上述の地盤改良方法では、改良壁体を構築する方向とベースマシンの走行方向とがほぼ平行になるようにベースマシンがセットされる。ベースマシンは、非走行状態で、混合攪拌ヘッドを作動させて、アームの操作により混合攪拌ヘッドを地中に貫入する。所定の深度まで混合攪拌ヘッドを貫入後、ベースマシンは、混合攪拌ヘッドを停止して、アームを旋回させながら改良壁体の長手方向と平行に所定量だけ走行する。そして、ベースマシンは、混合攪拌ヘッドを再び作動させ、アームを改良壁体の構築方向に所定量だけ旋回させることにより、混合攪拌ヘッドが改良壁体の構築方向に向かって掘進しつつ改良対象地盤を改良する。さらに、アームの旋回完了後、ベースマシンは、上述と同様にして、改良壁体の長手方向と平行に所定量だけ走行する。このように、アームの旋回による混合攪拌ヘッドの掘進工程(非走行掘進工程)及びベースマシンの走行工程(非掘進走行工程)を交互かつ連続的に繰り返すことによって、改良壁体が構築される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−307675号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1の地盤改良機械のように、混合攪拌ヘッドを地盤に貫入した状態でアームを旋回させて混合攪拌ヘッドで掘進しつつ地盤改良するのではなく、地盤改良箇所毎に混合攪拌ヘッドの貫入・引き抜きを行なって地盤改良する場合、地盤改良箇所毎で混合攪拌ヘッドの地盤改良箇所への位置合わせが必要になる。そして、ベースマシンのアームを動作させることによって混合攪拌ヘッドの位置が変化し、さらに、地盤改良箇所が変わるとベースマシンの移動が必要になることから、ベースマシンのオペレータの視線方向の混合攪拌ヘッドの位置が明確に把握できず、混合攪拌ヘッドの地盤改良箇所への位置合わせは、オペレータのみでは行なうことができない。このため、混合攪拌ヘッドの位置を観測しオペレータに通知して混合攪拌ヘッドを誘導する観測者が必要となる。
よって、地盤改良箇所が変わる毎に観測者による混合攪拌ヘッドの位置の誘導が必要になるため、地盤改良の施工中のほとんどの時間においてこの観測が必要となり、観測者は専属となる。従って、1つのベースマシンに対して、少なくとも1人の専属の観測者を必要とするため、コストが上昇するという問題がある。
【0007】
この発明はこのような問題点を解決するためになされたものであり、必要な作業者の数を低減することによりコストの低減を図る地盤改良工法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、この発明に係る地盤改良工法は、土及び固化材を混合攪拌すると共に掘削可能な混合攪拌機と、混合攪拌機が取り付けられた細長のケーシング部と、ケーシング部が可動なアームに取り付けられたベースマシンとを備える地盤改良装置による地盤改良工法において、ケーシング部には、ケーシング部の傾斜を測定する傾斜計が設けられ、ベースマシンには、ケーシング部との間の距離を測定する距離測定器が設けられており、a)混合攪拌機を第一の地盤改良箇所に配置し、傾斜計の測定した傾斜に基づきケーシング部を鉛直にするステップと、b)距離測定器がケーシング部及び距離測定器の間の距離を測定し、測定した距離を初期値とするステップと、c)ケーシング部及び混合攪拌機を所定の深度まで地盤に貫入させるステップと、d)ケーシング部及び混合攪拌機を所定の深度まで貫入後、地盤より引き抜くステップと、e)ステップc)またはd)において、ケーシング部が鉛直な状態から傾斜した際、傾斜計の測定した傾斜に基づきケーシング部を鉛直にすると共に、距離測定器の測定した距離に基づきケーシング部及び距離測定器の間の距離を初期値に合わせることによって、ケーシング部の位置を調整するステップと、f)ステップc)またはd)において、ケーシング部及び混合攪拌機の地盤への貫入から引き抜きまでの間に、混合攪拌機に固化材を供給し、混合攪拌機により固化材及び土を混合攪拌するステップとを含む。
【0009】
これにより、ケーシング部及び距離測定器の間を測定した距離の値をその初期値に設定した後、ベースマシンのオペレータは、ケーシング部の鉛直な状態からの傾斜、並びにケーシング部及び距離測定器の間の距離を確認しながら、ケーシング部の位置を所定の位置に調整しつつ、地盤改良を行なうことができる。よって、地盤改良の施工中は、地盤改良箇所にケーシング部の位置調整のための誘導者が不要になるため、必要な作業者の数を低減してコストの低減を図ることが可能である。
【0010】
地盤改良工法において、第一の地盤改良箇所から第二の地盤改良箇所に移動する際、ベースマシンが、第一の地盤改良箇所から第二の地盤改良箇所へ向かう方向と平行に移動し、混合攪拌機を第二の地盤改良箇所に配置するために、傾斜計の測定した傾斜に基づきケーシング部を鉛直にすると共に、距離測定器の測定した距離に基づきケーシング部及び距離測定器の間の距離を初期値に合わせてもよい。これにより、混合攪拌機の第一の地盤改良箇所から第二の地盤改良箇所への配置は、ベースマシンのオペレータのみで可能であるため、必要な作業者の数を低減してコストの低減を図ることが可能である。
【0011】
ケーシング部が鉛直な状態から傾斜した際、混合攪拌機の攪拌動作を緩やかにして、ケーシング部の位置を調整してもよい。ケーシング部の傾斜は、混合攪拌機が障害物に接触することや、混合攪拌機の貫入時に地盤の土質が変化すること等によって生じる。混合攪拌機の攪拌動作を緩やかにすることによって、障害物や周囲の土から混合攪拌機が受ける力が低減されるため、ケーシング部の位置の調整が容易になる。
距離測定器は超音波式であってもよい。超音波式の距離測定器は、安価でありコストを低減できる。さらに、超音波式の距離測定器は、対象物の材質に関係なく安定した測定が可能であり、また、明暗の影響を受けにくい。
距離測定器はレーザー式であってもよい。レーザー光線は、その広がりが小さい。このため、レーザー光線による距離測定は、その測定点は小さくなるので、正確な距離測定を行なうことができる。
【発明の効果】
【0012】
この発明に係る地盤改良工法によると、必要な作業者の数を低減することによりコストを低減させることが可能になる。
【図面の簡単な説明】
【0013】
【図1】この発明の実施の形態に係る地盤改良施工機の構成を示すものであって、地盤改良施工機を動作させる前の状態を示す模式側面図である。
【図2】図1の地盤改良施工機が動作している状態を示す模式側面図である。
【図3】図1及び2の地盤改良施工機の状態を示す模式平面図である。
【図4】図1の攪拌機を後方側から前方側に向かって見た拡大模式側面図である。
【発明を実施するための形態】
【0014】
以下、この発明の実施の形態について添付図面に基づいて説明する。
実施の形態
図1及び4を用いて、この発明の実施の形態に係る地盤改良施工機1の構成を説明する。なお、以下の実施形態において、ベースマシンとしてショベル系の掘削機であるバックホウを使用した場合の例について説明する。
【0015】
図1を参照すると、地盤改良装置である地盤改良施工機1は、重量が45t級のベースマシン2を備えている。ベースマシン2はアーム2aを有しており、アーム2aの先端部には、矩形断面を有し且つ細長の筒状部材からなるケーシング部3の一端が取り付けられている。ケーシング部3の他端には、混合攪拌機4(以下、攪拌機4と略称する)が取り付けられており、攪拌機4が、ケーシング部3を介してベースマシン2のアーム2aに垂下された状態となっている。
【0016】
図1及び図4を合わせて参照すると、攪拌機4は、ケーシング部3を両側から挟むようにして2つの略十字形状をした攪拌翼4aを回転可能に有し、ケーシング部3の内部に攪拌翼4aを駆動するためのモータ4cを有している。攪拌機4すなわちモータ4cは、ベースマシン2の操縦室2bでの操作によって動作させることができ、モータ4cが駆動することによって攪拌翼4aはその回転軸4bを中心に回転する。さらに、攪拌翼4aには、攪拌爪4a1が複数設けられており、攪拌翼4aは、回転することによって地盤を掘削・攪拌することができる。さらに、攪拌機4には、攪拌翼4aの近傍における回転軸4bを挟んだ上下に地盤の固化材である固化材スラリーを吐出するための吐出口として、上部吐出口4d及び下部吐出口4eが設けられている。上部吐出口4d及び下部吐出口4eには、ベースマシン2とは別に設けられた固化材スラリーの製造プラントで製造された固化材スラリーが供給されるようになっている。よって、攪拌機4は、攪拌翼4aを回転させつつ固化材スラリーを吐出することによって、攪拌翼4aにより掘削されてほぐされた地盤の土と固化材スラリーとを混合攪拌し、改良対象とする地盤の土質を改良して向上させる。そして、上述に示す攪拌機4は、回転する攪拌翼4aによって地盤改良を行なうため、ロータリー式混合攪拌機と称される。
【0017】
また、図1を参照すると、ケーシング部3におけるアーム2aとの接続部側となる端部には、支持部材5が設けられており、支持部材5には、ヘッドタンク6及び傾斜計7が設けられている。さらに、ベースマシン2の安定した車体には、圧力センサ8が設けられている。圧力センサ8は、アーム2aに沿って設けられた図示しない導圧管を介してヘッドタンク6に連結されており、ヘッドタンク6との水頭差を測定することができる。また、傾斜計7は、例えば、市販のサーボ方式重力加速度検出タイプが使用される。
【0018】
圧力センサ8及び傾斜計7は、ケーブルを介して、操縦室2bに設けられた表示モニタ2cに接続されている。表示モニタ2cには、圧力センサ8からヘッドタンク6及び圧力センサ8の水頭差を示す信号が送られ、傾斜計7から傾斜計7の傾斜角度を示す信号が送られる。表示モニタ2cは、圧力センサ8から送られる信号から、ベースマシン2に対する支持部材5の相対位置を算出し、この算出結果から、攪拌機4の位置を算出することによって掘削深度を算出して表示する。また、表示モニタ2cは、傾斜計7から送られる信号から、ケーシング部3の軸方向である長手方向の、鉛直方向Vに対する前後方向への傾斜角度θを計算して表示する。なお、表示モニタ2cには、測定・算出された掘削深度及びケーシング部3の傾斜角度θが、刻々とリアルタイムで表示され続ける
【0019】
また、ベースマシン2の操縦室2bには、超音波を使用して対象物までの距離を測定する超音波式の距離測定器11が設けられている。距離測定器11は、ベースマシン2が水平な地盤に設けられている場合に、超音波を水平な前方方向、すなわちケーシング部3に向けて水平な方向に発信し、ケーシング部3におけるベースマシン2側の面と距離測定器11との距離、すなわち、ケーシング部3と距離測定器11との距離を測定するように配置されている。よって、距離測定器11は、ケーシング部3と距離測定器11との水平距離を測定する。
【0020】
距離測定器11は、操縦室2bのオペレータが、距離測定器11に設けられた測距開始ボタンを押すことによって、超音波を発信して対象物までの距離を測定し、測定距離を表示する。距離測定器11は、測定開始ボタンを押すとそれ以降継続的に測距し続け、測定された対象物までの距離は、刻々とリアルタイムで表示され続ける。また、上述に示すように、ケーシング部3の傾斜角度θも、傾斜計7の検出により表示モニタ2cにリアルタイムで表示され続けている。
このように、ケーシング部3の傾斜角度θと、ケーシング部3と距離測定器11との距離すなわちケーシング部3の水平方向の位置とを操縦室2bのオペレータが常時リアルタイムで把握できることによって、ケーシング部3の定位置での鉛直な貫入が可能になる。また、場合によっては、距離測定器11の測距開始ボタンをON(測距開始)及びOFF(測距停止)することによって、ケーシング部3と距離測定器11との距離を一時的に計測し、この一時的な計測を必要に応じて行なうようにしてもよい。
【0021】
超音波式の距離測定器11は、例えば、バイモルフ振動子を使用したものが利用できる。バイモルフ振動子は、2つの圧電セラミックが分極方向を互いに逆にした状態で張り合わされたものであり、電圧が印加されることによって、一方の圧電セラミックが伸び、他方の圧電セラミックが縮むようにして動作する。
そして、距離測定器11は、送信部と受信部とを有しており、送信部及び受信部のそれぞれにバイモルフ振動子が設けられている。
【0022】
送信部では、バイモルフ振動子は、高周波の電圧が印加されると、電圧の極性に応じて2つの圧電セラミックが伸張動作と収縮動作とを繰り返すことによって、振動し超音波を発生する。なお、バイモルフ振動子に印加される電圧の周波数であるパルスは、例えば40kHz(キロヘルツ)のパルスにタイミングパルスを加えたものとなっている。
また、受信部では、バイモルフ振動子は、送信部が発信した超音波が対象物に反射して戻ってきたものを受信し、さらに、受信した超音波のパルスに応じて振動し、交番電流を発生する。
そして、距離測定器11は、送信部から発信されるタイミングパルスを含む超音波のパルスと、受信部で発生した交番電流のパルスとから、距離測定器11と対象物との距離を算出する。
【0023】
なお、距離測定器11は、最大測定距離が12〜18m(メートル)、発信する超音波の周波数が40kHz(キロヘルツ)、測定精度が測定距離の±(プラスマイナス)1%の誤差以内、最小測定単位1cm(センチメートル)、1回の測定動作での測定に要する時間が2秒以内であるものが好ましい。なお、超音波の伝播速度は、超音波が伝播する空間の空気の温度によって変化するため、距離測定器11で受信する超音波のパルスは、超音波が伝播する空間の空気の温度によって変化する。よって、距離測定器11は、温度に応じた超音波の伝播速度の補正を自動的に行なう機能を有するものが好ましい。
【0024】
次に、この発明の実施の形態に係る地盤改良施工機1による地盤改良の方法を説明する。
図3を参照すると、地盤改良を行なうエリアは、矩形状をした施工箇所10で示される。施工箇所10は、攪拌機4の形状に合わせて格子状に区分されており、列部分をA〜Cの3つの列に区分され、さらに、各列を行部分1、2、3、4、5・・・・・・に区分されている。よって、各施工区分は矩形状になっており、各施工区分の境界は、ベースマシン2のオペレータ及び施工場所の作業者から目視できるように、消石灰等による白いラインで明示されている。
【0025】
そして、詳細は後述するが、各施工区分においてケーシング部3と共に攪拌機4を鉛直下方向に地盤に貫入させて地盤改良が行なわれる。
また、各施工区分に対する施工の順序について、列部分の施工は、列A、B、Cの順で行なわれ、各列部分、例えば、列部分Aでは、施工区分A1、A2、A3・・・・・・の順で方向W1に向かって行なわれる。さらに、列部分Aの施工完了後、列部分Bの施工が行なわれる。このとき、列部分Bでの施工は、方向W1と反対の方向W2に向かって進められる。そして、列部分Bの施工完了後、列部分Cの施工が、施工区分C1から方向W1に向かって進められる。また、図1に示すように、各施工区分における地盤改良は、地盤表面から深度Dまで行なわれる。なお、45t級のベースマシン2を使用した場合、深度Dは11m(メートル)程度以下である。
よって、すべての施工区分の地盤改良を行なうことによって、施工箇所10では、施工箇所10の全体にわたる連続した改良体が形成される。
【0026】
ここで、第一の地盤改良箇所である施工区分C1における地盤改良施工機1による地盤改良の方法を説明する。
図1を参照すると、施工箇所10における施工区分C1の近傍に地盤改良施工機1のベースマシン2がセットされる。この際、操縦室2bのオペレータは、施工場所に配置された合図者の誘導により、ケーシング部3を介してアーム2aに垂下させた状態の攪拌機4が施工区分C1の上方に位置するようにベースマシン2の位置決めを行なう。このとき、図3を参照すると、ベースマシン2は、クローラ2dの長手方向である走行方向が、施工箇所10の列Cの長手方向、すなわち、施工区分C1、C2、C3・・・・・・の中心である杭芯を結ぶ線CLと平行になるように配置されている。
【0027】
さらに、図1を参照すると、操縦室2bのオペレータは、施工場所に配置された合図者の誘導により、アーム2aを操作して、攪拌機4の中心の位置と施工区分C1の杭芯CAの位置とを合わせるようにして攪拌機4を施工区分C1内に配置し、さらに、表示モニタ2cに表示されるケーシング部3の長手方向の傾斜角度θを確認しながら、傾斜角度θが0度となるように、すなわちケーシング部3の長手方向が鉛直方向Vになるようにケーシング部3の位置決めを行なう。
ベースマシン2及びケーシング部3の位置決めが完了すると、クローラ2dにおける施工箇所10側の側部に沿って、列Cの長手方向すなわち線CLと平行に、消石灰等による白いライン20が引かれる。(図3参照)
【0028】
さらに、操縦室2bのオペレータにより、距離測定器11が作動される。距離測定器11は、鉛直方向Vに直立したケーシング部3と距離測定器11との距離を測定し、測定した距離の値を初期値Lとして記憶する。
そして、上述に示す一連の動作を完了することによって、施工区分C1への地盤改良施工機1のセットが完了する。
【0029】
地盤改良施工機1のセット完了後、操縦室2bのオペレータは、攪拌機4を動作させ、さらに、アーム2aを操作することによって、攪拌翼4aを回転させている攪拌機4を地盤に貫入する。
攪拌機4は、アーム2aによって下方に押しつけられることにより、回転する攪拌翼4aが地盤をほぐしつつ、下方に掘進する。このとき、操縦室2bのオペレータは、表示モニタ2cに表示されるケーシング部3の傾斜角度θを確認しながら、アーム2aを操作する。
【0030】
図2を参照すると、攪拌機4が地中に貫入されると、オペレータは、攪拌翼4aを回転させたまま攪拌機4の下部吐出口4e(図4参照)から固化材スラリーを吐出させる。これにより、吐出された固化材スラリーが、攪拌機4の周辺の土と混合・攪拌される。
ここで、固化材スラリーと改良対象地盤の土との混合攪拌状況について説明する。固化材スラリーと改良対象地盤の土との混合攪拌は、事前に行なった固化材スラリーと改良対象土との配合試験等で予め決定された固化材添加量となるように、所定深度Dまでの間において攪拌機4を所定の一定の速度で貫入させながら、固化材スラリーを所定の流量で連続して吐出して、行なわれる。それによって、攪拌機4は、単位時間当たりの攪拌機4の貫入距離に攪拌機4の平面積すなわち攪拌機4の水平方向の攪拌領域の面積を掛けて算出される土量の土と、所定の流量で単位時間当たりに地盤中に供給された量の固化材スラリーとを、単位時間当たりに混合・攪拌する。
【0031】
また、攪拌翼4aを回転させつつ攪拌機4を地盤に貫入させていく過程で、地盤の土質の変化や地盤に存在する障害物との接触等の影響により攪拌翼4aに加わる力が変化すると、攪拌機4が水平方向に移動することがある。このとき、ケーシング部3の傾斜角度θが変化するが、表示モニタ2cに表示されるケーシング部3の傾斜角度θが所定の範囲を超えた場合、操縦室2bのオペレータは、攪拌機4の攪拌翼4aの回転数を下げ、そして、アーム2aによるケーシング部3の貫入を停止するか又はケーシング部3の貫入速度を低下させ、距離測定器11を作動させてケーシング部3と距離測定器11との距離を測定する。ここで、攪拌機4の攪拌翼4aの回転数を下げること、ケーシング部3の貫入を停止すること、又は、ケーシング部3の貫入速度を低下させることは、攪拌機4の攪拌動作を緩めることである。
【0032】
オペレータは、ケーシング部3の傾斜角度θと、距離測定器11により測定された距離及び距離の初期値Lの差とからケーシング部3の状態を把握する。そして、オペレータは、アーム2aを操作して、ケーシング部3の長手方向が傾斜角度θを0度すなわち鉛直となり、ケーシング部3と距離測定器11との距離の測定値が初期値Lと同一になるように、ケーシング部3の位置修正を行なう。なお、攪拌機4の攪拌翼4aの回転数を下げることによって、攪拌翼4aが地盤や地盤に存在する障害物等から受ける力を低減することができ、また、攪拌翼4aを回転させておくことによって、周囲の土を緩め、ケーシング部3の位置修正を容易にすることが可能である。
【0033】
オペレータは、ケーシング部3の位置を修正し、ケーシング部3の傾斜角度θが0度であり、且つケーシング部3と距離測定器11との距離が初期値Lと同一であることを確認後、攪拌機4の攪拌翼4aの回転数を再び上昇させ、アーム2aを操作してケーシング部3及び攪拌機4の地盤への貫入速度をケーシング部3の位置修正前の速度である当初の設定速度に戻して、貫入を続ける。そして、オペレータは、表示モニタ2cに表示される掘削深度が所定深度Dになると、アーム2aの貫入を停止させ、固化材スラリーの吐出を停止し、そのままの位置(最下端位置)で先端処理として攪拌翼4aの回転を続ける。この先端処理が終了すると、オペレータは、アーム2aを操作して、攪拌翼4aを回転させたままケーシング部3及び攪拌機4を上方に引き上げる。
【0034】
ケーシング部3及び攪拌機4を引き上げる際、オペレータは、表示モニタ2cに表示されるケーシング部3の傾斜角度θを確認しながら、ケーシング部3の長手方向が鉛直方向Vを維持するようにして引き上げを行なう。そして、攪拌機4が地表に引き上げられると、施工区分C1の地盤改良が完了する。
上述に示すように、固化材スラリーと土とを混合攪拌しつつ攪拌機4を所定深度Dまで貫入することによって、施工区分C1は、深度D全体にわたって地盤改良が行なわれる。
【0035】
図3を参照すると、施工区分C1の地盤改良の完了後、オペレータは、第二の地盤改良箇所である施工区分C2の地盤改良を行なうために、ベースマシン2をライン20に沿って方向W1に移動させる。ベースマシン2の移動は、ベースマシン2のアーム2aを旋回させずに行なわれ、そして、施工区分C1からC2への方向と平行、すなわち、施工区分C1及びC2の杭芯同士を結ぶ線CLと平行に行なわれる。このため、オペレータは、施工箇所10に引かれた施工区分C2を明示するライン20を確認しながら、攪拌機4の前後方向の位置をアーム2aにより調整し、且つ攪拌機4の前進後退方向の位置をクローラ2dの移動により調整することによって、攪拌機4を施工区分C2の上方に位置するように移動させる。さらに、オペレータは、表示モニタ2cに表示されるケーシング部3の傾斜角度θ(図1参照)が0度となるように、そして、距離測定器11によりケーシング部3と距離測定器11との距離を測定して、その測定値が初期値Lと同一になるように、アーム2aを操作して、ケーシング部3及び攪拌機4の位置を微調整する。
【0036】
オペレータは、ケーシング部3及び攪拌機4が所定の位置となったことを確認後、攪拌機4を作動させて、施工区分C2の地盤改良の施工を開始する。その後の動作は、施工区分C1と同様にして行なわれる。
上述のように各施工区分において同様の動作を繰り返すことによって、施工区分C2、C3、C4、C5・・・・・・の地盤改良が、地盤改良施工機1によって、順次行なわれていく。
【0037】
このように、この発明に係る地盤改良施工機1であって、土及び固化材スラリーを混合攪拌すると共に掘削可能な混合攪拌機4と、混合攪拌機4が取り付けられた細長のケーシング部3と、ケーシング部3が可動なアーム2aに取り付けられたベースマシン2とを備える地盤改良施工機1によれば、ケーシング部3には、ケーシング部3の傾斜を測定する傾斜計7が設けられ、ベースマシン2には、ケーシング部3との間の距離を測定する距離測定器11が設けられており、
a)混合攪拌機4を第一の地盤改良箇所である施工区分C1に配置し、傾斜計7の測定した傾斜に基づきケーシング部3を鉛直にするステップと、
b)距離測定器11がケーシング部3及び距離測定器11の間の距離を測定し、測定した距離を初期値Lとするステップと、
c)ケーシング部3及び混合攪拌機4を所定の深度Dまで地盤に貫入させるステップと、
d)ケーシング部3及び混合攪拌機4を所定の深度Dまで貫入後、地盤より引き抜くステップと、
e)ステップc)またはd)において、ケーシング部3が鉛直な状態から傾斜した際、傾斜計7の測定した傾斜に基づきケーシング部3を鉛直にすると共に、距離測定器11の測定した距離に基づきケーシング部3及び距離測定器11の間の距離を初期値Lに合わせることによって、ケーシング部3の位置を調整するステップと、
f)ステップc)またはd)において、ケーシング部3及び混合攪拌機4の地盤への貫入から引き抜きまでの間に、混合攪拌機4に固化材スラリーを供給し、混合攪拌機4により固化材スラリー及び土を混合攪拌するステップとを行なうことにより地盤改良工法を行なうことができる。
【0038】
これによって、ケーシング部3及び距離測定器11の間を測定した距離を距離の初期値Lに設定した後、ベースマシン2のオペレータは、ケーシング部3の鉛直な状態からの傾斜、並びにケーシング部3及び距離測定器11の間の距離を確認しながら、ケーシング部3の位置を所定の位置に調整しつつ、地盤改良を行なうことができる。よって、地盤改良の施工中は、地盤改良箇所にケーシング部3の位置調整のための誘導者が不要になるため、必要な作業者の数を低減してコストの低減を図ることが可能である。
【0039】
また、第一の地盤改良箇所である施工区分C1から第二の地盤改良箇所である施工区分C2に移動する際、ベースマシン2が、施工区分C1から施工区分C2へ向かう方向と平行に移動し、混合攪拌機4を施工区分C2に配置するために、傾斜計7の測定した傾斜に基づきケーシング部3を鉛直にすると共に、距離測定器11の測定した距離に基づきケーシング部3及び距離測定器11の間の距離を初期値Lに合わせている。これによって、混合攪拌機4の施工区分C1から施工区分C2への配置は、ベースマシン2のオペレータのみで可能であるため、必要な作業者の数を低減してコストの低減を図ることが可能である。
【0040】
また、ケーシング部3が鉛直な状態から傾斜した際、混合攪拌機4の攪拌動作を緩やかにして、ケーシング部3の位置を調整する。ケーシング部3の傾斜は、混合攪拌機4が障害物に接触することや、混合攪拌機4の貫入時に地盤の土質が変化すること等によって生じる。混合攪拌機4の攪拌動作を緩やかにすることによって、障害物や周囲の土から混合攪拌機4が受ける力が低減されるため、ケーシング部3の位置の調整が容易になる。
また、距離測定器11は超音波式であるが、超音波式の距離測定器は、安価でありコストを低減できる。さらに、超音波式の距離測定器は、対象物の材質に関係なく安定した測定が可能であり、また、明暗の影響を受けにくい。
【0041】
また、実施の形態では、距離測定器11として、超音波式の距離測定器を使用していたが、レーザー光線を使用して対象物までの距離を測定するレーザー式の距離測定器を使用することもできる。レーザー式の距離測定器としては、例えば、最大測定距離50m程度、測定精度±1.5mm程度、最小表示単位0.1mm程度、応答時間0.2秒程度で、光源として620〜690nm(ナノメートル)程度の波長の光を放出するレーザーダイオードを持ち、10m先のレーザースポット径が8mm程度のレーザー距離センサが挙げられる。このようなレーザー距離センサは、例えば、RS−232Cのコネクタ等の出力機構を備え、表示モニタ2cのような周辺機器に接続することによって常時リアルタイムに距離表示できることが好ましい。なお、レーザー光線は、レーザー距離センサの10m先のレーザースポット径が8mm程度であるように、その広がりが小さい。このため、レーザー光線による距離測定は、その測定点が小さいので、正確な距離測定を行なうことができる。さらに、レーザー光線を使用した距離測定器は、レーザー光線を全て吸収する又は全反射するような対象物以外に使用することができるため、ケーシング部3に対して直接距離を測定することができる。
【0042】
また、実施の形態では、ケーシング部3及び攪拌機4を地盤に貫入する時にのみ、固化材スラリーを地中に吐出していたが、これに限定されるものでない。ケーシング部3及び攪拌機4を地盤から引き上げる際にも、固化材スラリーを地中に吐出してもよい。この場合、固化材スラリーの吐出口を下部吐出口4eから上部吐出口4dに切り替える必要がある。固化材スラリーの吐出時期及び吐出量は、改良対象となる地盤の土質や改良目標強度等によって決定される。
また、ベースマシン2の安定した箇所にさらに傾斜計を設けることによって、ベースマシン2の傾斜角度を検出するようにしてもよい。ベースマシン2が傾斜している場合、ケーシング部3と距離測定器11との間の距離が距離測定器11により水平距離ではなく斜距離として測定されるが、この測定された斜距離を、ベースマシン2の傾斜角度に応じて、水平距離に補正するようにしてもよい。これにより、より精度の高いケーシング部3の位置管理が可能になる。
【符号の説明】
【0043】
1 地盤改良施工機(地盤改良装置)、2 ベースマシン、2a アーム(ベースマシンのアーム)、3 ケーシング部、4 混合攪拌機、7 傾斜計、11 距離測定器、C1 施工区分(第一の地盤改良箇所)、C2 施工区分(第二の地盤改良箇所)、D 深度(所定の深度)、L 初期値(測定した距離の初期値)。
【特許請求の範囲】
【請求項1】
土及び固化材を混合攪拌すると共に掘削可能な混合攪拌機と、前記混合攪拌機が取り付けられた細長のケーシング部と、前記ケーシング部が可動なアームに取り付けられたベースマシンとを備える地盤改良装置による地盤改良工法において、
前記ケーシング部には、前記ケーシング部の傾斜を測定する傾斜計が設けられ、
前記ベースマシンには、前記ケーシング部との間の距離を測定する距離測定器が設けられており、
a)前記混合攪拌機を第一の地盤改良箇所に配置し、前記傾斜計の測定した傾斜に基づき前記ケーシング部を鉛直にするステップと、
b)前記距離測定器が前記ケーシング部及び前記距離測定器の間の距離を測定し、測定した距離を初期値とするステップと、
c)前記ケーシング部及び前記混合攪拌機を所定の深度まで地盤に貫入させるステップと、
d)前記ケーシング部及び前記混合攪拌機を所定の深度まで貫入後、地盤より引き抜くステップと、
e)ステップc)またはd)において、前記ケーシング部が鉛直な状態から傾斜した際、前記傾斜計の測定した傾斜に基づき前記ケーシング部を鉛直にすると共に、前記距離測定器の測定した距離に基づき前記ケーシング部及び前記距離測定器の間の距離を前記初期値に合わせることによって、前記ケーシング部の位置を調整するステップと、
f)ステップc)またはd)において、前記ケーシング部及び前記混合攪拌機の地盤への貫入から引き抜きまでの間に、前記混合攪拌機に固化材を供給し、前記混合攪拌機により前記固化材及び土を混合攪拌するステップと
を含む地盤改良工法。
【請求項2】
前記第一の地盤改良箇所から第二の地盤改良箇所に移動する際、
前記ベースマシンが、前記第一の地盤改良箇所から前記第二の地盤改良箇所へ向かう方向と平行に移動し、
前記混合攪拌機を前記第二の地盤改良箇所に配置するために、前記傾斜計の測定した傾斜に基づき前記ケーシング部を鉛直にすると共に、前記距離測定器の測定した距離に基づき前記ケーシング部及び前記距離測定器の間の距離を前記初期値に合わせる、請求項1に記載の地盤改良工法。
【請求項3】
前記ケーシング部が鉛直な状態から傾斜した際、前記混合攪拌機の攪拌動作を緩やかにして、前記ケーシング部の位置を調整する、請求項1または2に記載の地盤改良工法。
【請求項4】
前記距離測定器は超音波式である、請求項1〜3のいずれか一項に記載の地盤改良工法。
【請求項5】
前記距離測定器はレーザー式である、請求項1〜3のいずれか一項に記載の地盤改良工法。
【請求項1】
土及び固化材を混合攪拌すると共に掘削可能な混合攪拌機と、前記混合攪拌機が取り付けられた細長のケーシング部と、前記ケーシング部が可動なアームに取り付けられたベースマシンとを備える地盤改良装置による地盤改良工法において、
前記ケーシング部には、前記ケーシング部の傾斜を測定する傾斜計が設けられ、
前記ベースマシンには、前記ケーシング部との間の距離を測定する距離測定器が設けられており、
a)前記混合攪拌機を第一の地盤改良箇所に配置し、前記傾斜計の測定した傾斜に基づき前記ケーシング部を鉛直にするステップと、
b)前記距離測定器が前記ケーシング部及び前記距離測定器の間の距離を測定し、測定した距離を初期値とするステップと、
c)前記ケーシング部及び前記混合攪拌機を所定の深度まで地盤に貫入させるステップと、
d)前記ケーシング部及び前記混合攪拌機を所定の深度まで貫入後、地盤より引き抜くステップと、
e)ステップc)またはd)において、前記ケーシング部が鉛直な状態から傾斜した際、前記傾斜計の測定した傾斜に基づき前記ケーシング部を鉛直にすると共に、前記距離測定器の測定した距離に基づき前記ケーシング部及び前記距離測定器の間の距離を前記初期値に合わせることによって、前記ケーシング部の位置を調整するステップと、
f)ステップc)またはd)において、前記ケーシング部及び前記混合攪拌機の地盤への貫入から引き抜きまでの間に、前記混合攪拌機に固化材を供給し、前記混合攪拌機により前記固化材及び土を混合攪拌するステップと
を含む地盤改良工法。
【請求項2】
前記第一の地盤改良箇所から第二の地盤改良箇所に移動する際、
前記ベースマシンが、前記第一の地盤改良箇所から前記第二の地盤改良箇所へ向かう方向と平行に移動し、
前記混合攪拌機を前記第二の地盤改良箇所に配置するために、前記傾斜計の測定した傾斜に基づき前記ケーシング部を鉛直にすると共に、前記距離測定器の測定した距離に基づき前記ケーシング部及び前記距離測定器の間の距離を前記初期値に合わせる、請求項1に記載の地盤改良工法。
【請求項3】
前記ケーシング部が鉛直な状態から傾斜した際、前記混合攪拌機の攪拌動作を緩やかにして、前記ケーシング部の位置を調整する、請求項1または2に記載の地盤改良工法。
【請求項4】
前記距離測定器は超音波式である、請求項1〜3のいずれか一項に記載の地盤改良工法。
【請求項5】
前記距離測定器はレーザー式である、請求項1〜3のいずれか一項に記載の地盤改良工法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−132729(P2011−132729A)
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願番号】特願2009−292541(P2009−292541)
【出願日】平成21年12月24日(2009.12.24)
【出願人】(000185972)小野田ケミコ株式会社 (58)
【Fターム(参考)】
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願日】平成21年12月24日(2009.12.24)
【出願人】(000185972)小野田ケミコ株式会社 (58)
【Fターム(参考)】
[ Back to top ]