
地盤改良機
【課題】比較的硬度の高い地盤に対しても、貫入の速度を大きく低下させずに、地盤中に貫入して撹拌することのできる地盤改良機を提供する。
【解決手段】ベースマシン4と、揺動可能なアーム5と、地盤中に貫入されるフレーム6と、撹拌手段7を備えた地盤改良機であって、撹拌手段7が、支持体8と回転軸10と撹拌翼11を有し、撹拌翼11が、腕部12とブレード部13と複数の撹拌爪14を有し、複数の撹拌爪14の中で支持体8に最も近い撹拌爪14aが、弾性変形可能な撹拌爪であり、撹拌爪14aが支持体8に衝突しないようにガイド部16を有する地盤改良機。
【解決手段】ベースマシン4と、揺動可能なアーム5と、地盤中に貫入されるフレーム6と、撹拌手段7を備えた地盤改良機であって、撹拌手段7が、支持体8と回転軸10と撹拌翼11を有し、撹拌翼11が、腕部12とブレード部13と複数の撹拌爪14を有し、複数の撹拌爪14の中で支持体8に最も近い撹拌爪14aが、弾性変形可能な撹拌爪であり、撹拌爪14aが支持体8に衝突しないようにガイド部16を有する地盤改良機。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地盤改良機に関し、特に、鉛直方向に回転する撹拌爪を有する撹拌手段(以下、ロータリー式撹拌手段ともいう。)を備えた地盤改良機に関する。
【背景技術】
【0002】
従来、地盤改良機として、ベースマシン(例えば、フロート式走行体)の上に旋回体を搭載し、この旋回体にアームを取り付け、このアームに撹拌機(ロータリー式撹拌手段を含むもの)を取り付けてなる軟弱地盤改良機が知られている(特許文献1参照)。
一般に、ロータリー式撹拌手段を有する地盤改良機は、主に、含水率の高い軟弱な粘性土等からなる軟弱地盤を改良の対象としていることが多い。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−68124号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロータリー式撹拌手段を有する地盤改良機を用いた場合、ベースマシン上の旋回体に取り付けられたアームが、ロータリー式撹拌手段の主な貫入力を与えるので、貫入力が比較的小さく、このため、せん断強さの大きい土質からなる地盤に貫入しようとすると、地盤からの抵抗によって貫入の速度が遅くなるという問題があった。
特に、最近、比較的硬度の高い地盤を対象にした地盤改良工事が増えており、貫入力を増大させる技術が求められている。例えば、大きい建築構造物の建築基礎のような永久構造物の支持力を確保するために、比較的硬度の高い地盤であっても、固化材を注入して、地盤を改良する需要が高まっている。
そこで、本発明は、比較的硬度の高い地盤に対しても、貫入の速度を大きく低下させずに、地盤中に貫入して撹拌することのできる地盤改良機を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明者は、上記課題を解決するために鋭意検討した結果、ロータリー式撹拌手段の回転軸から径方向外側に向かって延びる腕部の先端に固着されたブレード部から延びる複数の撹拌爪の中の一部の撹拌爪が、特定の構造を有することなどによって、比較的硬度の高い地盤に対しても、貫入の速度を大きく低下させずに、地盤中に貫入して撹拌しうることを見出し、本発明を完成した。
【0006】
すなわち、本発明は、以下の[1]〜[2]を提供するものである。
[1]ベースマシンと、該ベースマシンに取り付けられた揺動可能なアームと、該アームの端部から垂下されたフレームと、該フレームの下端に取り付けられた撹拌手段を備えた地盤改良機であって、上記撹拌手段が、上記フレームの下端に取り付けられた支持体と、該支持体から左右の両側に水平方向に延設された回転軸と、該回転軸に支持されて鉛直方向に回転可能な撹拌翼を有し、上記撹拌翼が、上記回転軸から径方向外側に向かって延びる腕部と、該腕部の先端に固着された水平方向に延びるブレード部と、該ブレード部から上記腕部の反対側に向かって延びる複数の撹拌爪を有し、上記複数の撹拌爪の中の、上記支持体に最も近い撹拌爪が、弾性変形可能な撹拌爪であり、上記弾性変形可能な撹拌爪がその回転軌跡の上端及びその近傍領域で上記支持体またはフレームに直接、当接しないように、上記支持体またはフレームの周囲に、上記弾性変形可能な撹拌爪を当接させて案内するためのガイド部を有し、上記弾性変形可能な撹拌爪が、上記ガイド部が配設された場所を通過する時に上記ガイド部の表面から受ける力によって上記フレームの鉛直方向の軸線から遠ざかり、かつ上記ガイド部が配設された場所以外の場所を通過する時に上記フレームの鉛直方向の軸線に近づくように構成されていることを特徴とする地盤改良機。
[2]上記弾性変形可能な撹拌爪の弾性部分が、ねじりコイルばね、または、板ばねである上記[1]に記載の地盤改良機。
【発明の効果】
【0007】
本発明の地盤改良機は、弾性変形可能な撹拌爪が、その回転軌跡の下端及びその近傍領域にて、フレームの鉛直方向の軸線に近い位置を通過するように回転するので、地盤に対する貫入力が大きく、比較的硬度の高い地盤に対しても、貫入の速度を大きく低下させることがない。
また、本発明の地盤改良機は、弾性変形可能な撹拌爪を当接させて案内するためのガイド部を有するので、弾性変形可能な撹拌爪が、フレームまたは支持体を円滑に回避することができ、撹拌爪とフレームまたは支持体との衝突による撹拌爪の破損や、フレームまたは支持体の摩耗を生じさせることがない。なお、ガイド部は、摩耗した場合に新たなガイド部と容易に交換しうるように、フレームまたは支持体に脱着可能に取り付けられる。
【図面の簡単な説明】
【0008】
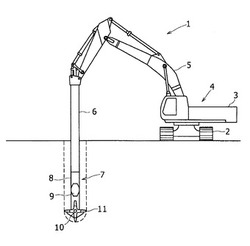
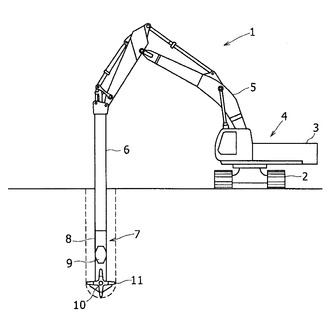
【図1】本発明の地盤改良機の一例を示す正面図である。
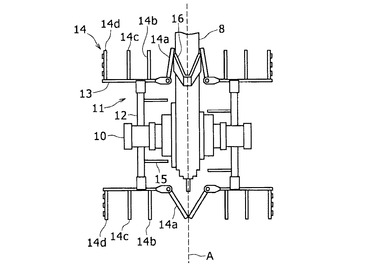
【図2】本発明の地盤改良機の撹拌手段の一例を示す正面図である。
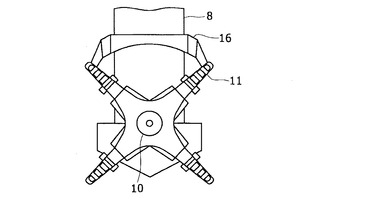
【図3】図2に示す撹拌手段の側面図である。
【図4】ねじりコイルばねを有する撹拌爪の一例を示す斜視図である。
【図5】弾性変形可能な撹拌爪として用いられる板ばねの一例を示す斜視図である。
【図6】板ばねを有する撹拌手段の一例を示す正面図である。
【発明を実施するための形態】
【0009】
以下、図面を参照しつつ本発明の地盤改良機の例を説明する。
図1中、本発明の地盤改良機は、走行体2の上に旋回体3を搭載してなるベースマシン4と、ベースマシン4に取り付けられた揺動可能なアーム5と、アーム5の端部から垂下されたフレーム6と、フレーム6の下端に取り付けられた撹拌手段7を備えている。
なお、旋回体3の内部には運転席が設けられている。運転者は、運転席にて、走行体2、旋回体3、アーム5、及び撹拌手段7の各部を制御することができる。
フレーム6は、例えば、矩形の断面形状を有する中空の管状部材であり、その外側に、固化材スラリーを供給するためのホースが取り付けられており、また、その内部空間内に、撹拌手段7の駆動用の配管等が収容されている。フレーム6の軸線(矩形の断面形状の中心点)は、鉛直方向に延びている。なお、フレーム6はケーシングと称されることもある。
フレーム6の長さは、地盤改良工事で予定している掘削の長さに応じて、適宜、定めることができる。
【0010】
撹拌手段7は、フレーム6の下端に取り付けられた支持体8と、支持体8に支持された水平方向に延びる回転軸10と、回転軸10に支持されて鉛直方向に回転可能な撹拌翼11を有する。
支持体8は、例えば、フレーム6の下方に延びる、矩形の断面形状を有する中空の管状部分を含むものである。支持体8の中空の管状部分の内部空間内には、撹拌手段7の駆動用の配管等が収容されている。なお、モーター9が、支持体8の構成部分として、撹拌翼11の上方に配設されている。駆動源であるモーター9は、回転軸10に動力を伝達し、撹拌翼11を回転させる。また、支持体8の上部及び下部に、固化材スラリーを噴射するための噴射口(図示せず)が設けられている。本発明の地盤改良機は、撹拌手段7によって地盤(掘削土)と固化材スラリーを混合撹拌して、地盤改良体を造成するものである。
【0011】
撹拌翼11は、図2に示すように、回転軸10から径方向外側に向かって延びる腕部12と、腕部12の先端に固着された水平方向に延びる板体であるブレード部13と、ブレード部13から腕部12の反対側に向かって延びる複数の撹拌爪14を有する。なお、腕部12には、棒状の付着土落しビット15が、水平方向に延びるように固着されている。また、ブレード部13は、上述のとおり水平方向に延びる板体であり、回転軸10の回転によってブレード部13の位置が変化しても、常に水平方向に延びている。
図2に示す例では、複数の撹拌爪14として、支持体8に近い側から順に、撹拌爪14a、撹拌爪14b、撹拌爪14c、撹拌爪14d、の計4つの撹拌爪が設けられている。これらの撹拌爪は、いずれも、略二等辺三角形状の板体として形成されている。
このうち、撹拌爪14b〜14dは、ブレード部13に対して垂直な方向に延びるように、ブレード部13に固着されている。
【0012】
一方、支持体8に最も近い撹拌爪である撹拌爪14aは、ガイド部16の表面から受ける力によってフレーム6の鉛直方向の軸線から遠ざかり、かつ、ガイド部16の表面から力を受けていない時にはフレーム6の鉛直方向の軸線に近づくような弾性変形可能な撹拌爪である。図2中、フレーム6の鉛直方向の軸線は、符号Aを付した点線で示している。
図2中、回転軸10の下方に位置する撹拌翼11の撹拌爪14aが、その回転軌跡の下端及びその近傍領域にて、他の部材と衝突せずに回転することのできるように、支持体8の下端の下方には、撹拌爪14aが通過可能な空間が形成されている。このような空間が形成されているため、フレーム6の軸線Aに対して左右対称に位置する2つの撹拌翼11は、2つの撹拌爪14aによって、略V字状の形状を形成し、フレーム6の軸線Aの近傍を含む領域まで地盤を掘削することができる。
【0013】
図2中、回転軸10の上方に位置する撹拌翼11の撹拌爪14aが、その回転軌跡の上端及びその近傍領域にて、支持体8に直接、当接しないように、支持体8の周囲には、撹拌爪14aを当接させて案内するためのガイド部16が取り付けられている。
ガイド部16は、撹拌爪14aが衝撃を受けずに摺動しながら円滑に回転することができるような表面を有する。撹拌爪14aは、その回転軌跡の上端及びその近傍領域を通過する際に、ガイド部16の表面に当接して、徐々に弾性力が増大して最大負荷状態(回転軌跡の上端)に達し、その後、徐々に弾性力が低減して、ガイド部16の表面から離れる。
ガイド部16を有しない場合、撹拌爪14aが支持体8に衝突するので、支持体8に最も近い撹拌爪である撹拌爪14aが破損したり、支持体8が摩耗する。
なお、支持体8が鉛直方向に短尺である場合、ガイド部16は、フレーム6(図1参照)に取り付けてもよい。
ガイド部16は、例えば、金属板等の板状部材を加工して作製することができる。ガイド部16は、支持体8またはフレーム6に、容易に脱着することができるように取り付けられる。ガイド部16は、施工を繰り返して摩耗した場合、新たなガイド部と交換される。
【0014】
図3は、図2に示す一対の撹拌翼11の片方を、側方から見た状態を示すものである。
図3中、回転軸10から、弾性変形可能な撹拌爪14aを有する撹拌翼11が、全部で4つ、90度の間隔を空けて、設けられている。
なお、本発明においては、図3に示す形態以外に、例えば、弾性変形可能な撹拌爪を有する撹拌翼と、弾性変形しない撹拌爪を有する撹拌翼を組み合わせて、撹拌手段を構成したもの(この場合、弾性変形可能な撹拌爪を有する撹拌翼の数は、1つ以上の任意の数である。)や、回転軸の周囲の撹拌翼の数を4つではなく、3つ以下または5つ以上にしたもの、あるいは、4つと3つを組み合わせたものなどを採用することができる。
【0015】
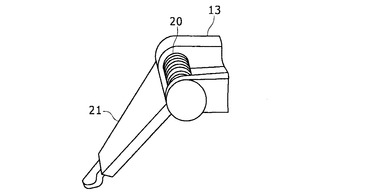
図2に示す撹拌爪14aとしては、例えば、図4に示すようなねじりコイルばねを有する撹拌爪が挙げられる。図4中、弾性変形可能な撹拌爪は、ブレード部13との連結部分に配設したねじりコイルばね20と、略二等辺三角形状の板体である撹拌爪本体21とによって構成されている。
【0016】
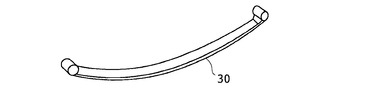
弾性変形可能な撹拌爪としては、図5に示すような板ばね30を用いることもできる。
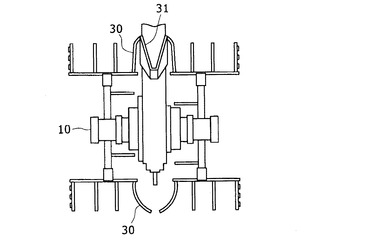
板ばね30を用いた撹拌手段の例を、図6に示す。図6に示す撹拌手段は、撹拌爪14aに代えて板ばね30を用いたこと、及び、ガイド部16に代えて、板ばね30の形状及び大きさに対応させたガイド部31を採用したこと以外は図2に示す撹拌手段と同様である。
【符号の説明】
【0017】
1 地盤改良機
2 走行体
3 旋回体
4 ベースマシン
5 アーム
6 フレーム(ケーシング)
7 撹拌手段
8 支持体
9 モーター
10 回転軸
11 撹拌翼
12 腕部
13 ブレード部
14 撹拌爪
14a 弾性変形可能な撹拌爪
14b〜14d 弾性変形しない撹拌爪
15 付着土落しビット
16、31 ガイド部
20 ねじりコイルばね
21 撹拌爪本体
30 板ばね
【技術分野】
【0001】
本発明は、地盤改良機に関し、特に、鉛直方向に回転する撹拌爪を有する撹拌手段(以下、ロータリー式撹拌手段ともいう。)を備えた地盤改良機に関する。
【背景技術】
【0002】
従来、地盤改良機として、ベースマシン(例えば、フロート式走行体)の上に旋回体を搭載し、この旋回体にアームを取り付け、このアームに撹拌機(ロータリー式撹拌手段を含むもの)を取り付けてなる軟弱地盤改良機が知られている(特許文献1参照)。
一般に、ロータリー式撹拌手段を有する地盤改良機は、主に、含水率の高い軟弱な粘性土等からなる軟弱地盤を改良の対象としていることが多い。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−68124号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロータリー式撹拌手段を有する地盤改良機を用いた場合、ベースマシン上の旋回体に取り付けられたアームが、ロータリー式撹拌手段の主な貫入力を与えるので、貫入力が比較的小さく、このため、せん断強さの大きい土質からなる地盤に貫入しようとすると、地盤からの抵抗によって貫入の速度が遅くなるという問題があった。
特に、最近、比較的硬度の高い地盤を対象にした地盤改良工事が増えており、貫入力を増大させる技術が求められている。例えば、大きい建築構造物の建築基礎のような永久構造物の支持力を確保するために、比較的硬度の高い地盤であっても、固化材を注入して、地盤を改良する需要が高まっている。
そこで、本発明は、比較的硬度の高い地盤に対しても、貫入の速度を大きく低下させずに、地盤中に貫入して撹拌することのできる地盤改良機を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明者は、上記課題を解決するために鋭意検討した結果、ロータリー式撹拌手段の回転軸から径方向外側に向かって延びる腕部の先端に固着されたブレード部から延びる複数の撹拌爪の中の一部の撹拌爪が、特定の構造を有することなどによって、比較的硬度の高い地盤に対しても、貫入の速度を大きく低下させずに、地盤中に貫入して撹拌しうることを見出し、本発明を完成した。
【0006】
すなわち、本発明は、以下の[1]〜[2]を提供するものである。
[1]ベースマシンと、該ベースマシンに取り付けられた揺動可能なアームと、該アームの端部から垂下されたフレームと、該フレームの下端に取り付けられた撹拌手段を備えた地盤改良機であって、上記撹拌手段が、上記フレームの下端に取り付けられた支持体と、該支持体から左右の両側に水平方向に延設された回転軸と、該回転軸に支持されて鉛直方向に回転可能な撹拌翼を有し、上記撹拌翼が、上記回転軸から径方向外側に向かって延びる腕部と、該腕部の先端に固着された水平方向に延びるブレード部と、該ブレード部から上記腕部の反対側に向かって延びる複数の撹拌爪を有し、上記複数の撹拌爪の中の、上記支持体に最も近い撹拌爪が、弾性変形可能な撹拌爪であり、上記弾性変形可能な撹拌爪がその回転軌跡の上端及びその近傍領域で上記支持体またはフレームに直接、当接しないように、上記支持体またはフレームの周囲に、上記弾性変形可能な撹拌爪を当接させて案内するためのガイド部を有し、上記弾性変形可能な撹拌爪が、上記ガイド部が配設された場所を通過する時に上記ガイド部の表面から受ける力によって上記フレームの鉛直方向の軸線から遠ざかり、かつ上記ガイド部が配設された場所以外の場所を通過する時に上記フレームの鉛直方向の軸線に近づくように構成されていることを特徴とする地盤改良機。
[2]上記弾性変形可能な撹拌爪の弾性部分が、ねじりコイルばね、または、板ばねである上記[1]に記載の地盤改良機。
【発明の効果】
【0007】
本発明の地盤改良機は、弾性変形可能な撹拌爪が、その回転軌跡の下端及びその近傍領域にて、フレームの鉛直方向の軸線に近い位置を通過するように回転するので、地盤に対する貫入力が大きく、比較的硬度の高い地盤に対しても、貫入の速度を大きく低下させることがない。
また、本発明の地盤改良機は、弾性変形可能な撹拌爪を当接させて案内するためのガイド部を有するので、弾性変形可能な撹拌爪が、フレームまたは支持体を円滑に回避することができ、撹拌爪とフレームまたは支持体との衝突による撹拌爪の破損や、フレームまたは支持体の摩耗を生じさせることがない。なお、ガイド部は、摩耗した場合に新たなガイド部と容易に交換しうるように、フレームまたは支持体に脱着可能に取り付けられる。
【図面の簡単な説明】
【0008】
【図1】本発明の地盤改良機の一例を示す正面図である。
【図2】本発明の地盤改良機の撹拌手段の一例を示す正面図である。
【図3】図2に示す撹拌手段の側面図である。
【図4】ねじりコイルばねを有する撹拌爪の一例を示す斜視図である。
【図5】弾性変形可能な撹拌爪として用いられる板ばねの一例を示す斜視図である。
【図6】板ばねを有する撹拌手段の一例を示す正面図である。
【発明を実施するための形態】
【0009】
以下、図面を参照しつつ本発明の地盤改良機の例を説明する。
図1中、本発明の地盤改良機は、走行体2の上に旋回体3を搭載してなるベースマシン4と、ベースマシン4に取り付けられた揺動可能なアーム5と、アーム5の端部から垂下されたフレーム6と、フレーム6の下端に取り付けられた撹拌手段7を備えている。
なお、旋回体3の内部には運転席が設けられている。運転者は、運転席にて、走行体2、旋回体3、アーム5、及び撹拌手段7の各部を制御することができる。
フレーム6は、例えば、矩形の断面形状を有する中空の管状部材であり、その外側に、固化材スラリーを供給するためのホースが取り付けられており、また、その内部空間内に、撹拌手段7の駆動用の配管等が収容されている。フレーム6の軸線(矩形の断面形状の中心点)は、鉛直方向に延びている。なお、フレーム6はケーシングと称されることもある。
フレーム6の長さは、地盤改良工事で予定している掘削の長さに応じて、適宜、定めることができる。
【0010】
撹拌手段7は、フレーム6の下端に取り付けられた支持体8と、支持体8に支持された水平方向に延びる回転軸10と、回転軸10に支持されて鉛直方向に回転可能な撹拌翼11を有する。
支持体8は、例えば、フレーム6の下方に延びる、矩形の断面形状を有する中空の管状部分を含むものである。支持体8の中空の管状部分の内部空間内には、撹拌手段7の駆動用の配管等が収容されている。なお、モーター9が、支持体8の構成部分として、撹拌翼11の上方に配設されている。駆動源であるモーター9は、回転軸10に動力を伝達し、撹拌翼11を回転させる。また、支持体8の上部及び下部に、固化材スラリーを噴射するための噴射口(図示せず)が設けられている。本発明の地盤改良機は、撹拌手段7によって地盤(掘削土)と固化材スラリーを混合撹拌して、地盤改良体を造成するものである。
【0011】
撹拌翼11は、図2に示すように、回転軸10から径方向外側に向かって延びる腕部12と、腕部12の先端に固着された水平方向に延びる板体であるブレード部13と、ブレード部13から腕部12の反対側に向かって延びる複数の撹拌爪14を有する。なお、腕部12には、棒状の付着土落しビット15が、水平方向に延びるように固着されている。また、ブレード部13は、上述のとおり水平方向に延びる板体であり、回転軸10の回転によってブレード部13の位置が変化しても、常に水平方向に延びている。
図2に示す例では、複数の撹拌爪14として、支持体8に近い側から順に、撹拌爪14a、撹拌爪14b、撹拌爪14c、撹拌爪14d、の計4つの撹拌爪が設けられている。これらの撹拌爪は、いずれも、略二等辺三角形状の板体として形成されている。
このうち、撹拌爪14b〜14dは、ブレード部13に対して垂直な方向に延びるように、ブレード部13に固着されている。
【0012】
一方、支持体8に最も近い撹拌爪である撹拌爪14aは、ガイド部16の表面から受ける力によってフレーム6の鉛直方向の軸線から遠ざかり、かつ、ガイド部16の表面から力を受けていない時にはフレーム6の鉛直方向の軸線に近づくような弾性変形可能な撹拌爪である。図2中、フレーム6の鉛直方向の軸線は、符号Aを付した点線で示している。
図2中、回転軸10の下方に位置する撹拌翼11の撹拌爪14aが、その回転軌跡の下端及びその近傍領域にて、他の部材と衝突せずに回転することのできるように、支持体8の下端の下方には、撹拌爪14aが通過可能な空間が形成されている。このような空間が形成されているため、フレーム6の軸線Aに対して左右対称に位置する2つの撹拌翼11は、2つの撹拌爪14aによって、略V字状の形状を形成し、フレーム6の軸線Aの近傍を含む領域まで地盤を掘削することができる。
【0013】
図2中、回転軸10の上方に位置する撹拌翼11の撹拌爪14aが、その回転軌跡の上端及びその近傍領域にて、支持体8に直接、当接しないように、支持体8の周囲には、撹拌爪14aを当接させて案内するためのガイド部16が取り付けられている。
ガイド部16は、撹拌爪14aが衝撃を受けずに摺動しながら円滑に回転することができるような表面を有する。撹拌爪14aは、その回転軌跡の上端及びその近傍領域を通過する際に、ガイド部16の表面に当接して、徐々に弾性力が増大して最大負荷状態(回転軌跡の上端)に達し、その後、徐々に弾性力が低減して、ガイド部16の表面から離れる。
ガイド部16を有しない場合、撹拌爪14aが支持体8に衝突するので、支持体8に最も近い撹拌爪である撹拌爪14aが破損したり、支持体8が摩耗する。
なお、支持体8が鉛直方向に短尺である場合、ガイド部16は、フレーム6(図1参照)に取り付けてもよい。
ガイド部16は、例えば、金属板等の板状部材を加工して作製することができる。ガイド部16は、支持体8またはフレーム6に、容易に脱着することができるように取り付けられる。ガイド部16は、施工を繰り返して摩耗した場合、新たなガイド部と交換される。
【0014】
図3は、図2に示す一対の撹拌翼11の片方を、側方から見た状態を示すものである。
図3中、回転軸10から、弾性変形可能な撹拌爪14aを有する撹拌翼11が、全部で4つ、90度の間隔を空けて、設けられている。
なお、本発明においては、図3に示す形態以外に、例えば、弾性変形可能な撹拌爪を有する撹拌翼と、弾性変形しない撹拌爪を有する撹拌翼を組み合わせて、撹拌手段を構成したもの(この場合、弾性変形可能な撹拌爪を有する撹拌翼の数は、1つ以上の任意の数である。)や、回転軸の周囲の撹拌翼の数を4つではなく、3つ以下または5つ以上にしたもの、あるいは、4つと3つを組み合わせたものなどを採用することができる。
【0015】
図2に示す撹拌爪14aとしては、例えば、図4に示すようなねじりコイルばねを有する撹拌爪が挙げられる。図4中、弾性変形可能な撹拌爪は、ブレード部13との連結部分に配設したねじりコイルばね20と、略二等辺三角形状の板体である撹拌爪本体21とによって構成されている。
【0016】
弾性変形可能な撹拌爪としては、図5に示すような板ばね30を用いることもできる。
板ばね30を用いた撹拌手段の例を、図6に示す。図6に示す撹拌手段は、撹拌爪14aに代えて板ばね30を用いたこと、及び、ガイド部16に代えて、板ばね30の形状及び大きさに対応させたガイド部31を採用したこと以外は図2に示す撹拌手段と同様である。
【符号の説明】
【0017】
1 地盤改良機
2 走行体
3 旋回体
4 ベースマシン
5 アーム
6 フレーム(ケーシング)
7 撹拌手段
8 支持体
9 モーター
10 回転軸
11 撹拌翼
12 腕部
13 ブレード部
14 撹拌爪
14a 弾性変形可能な撹拌爪
14b〜14d 弾性変形しない撹拌爪
15 付着土落しビット
16、31 ガイド部
20 ねじりコイルばね
21 撹拌爪本体
30 板ばね
【特許請求の範囲】
【請求項1】
ベースマシンと、該ベースマシンに取り付けられた揺動可能なアームと、該アームの端部から垂下されたフレームと、該フレームの下端に取り付けられた撹拌手段を備えた地盤改良機であって、
上記撹拌手段が、上記フレームの下端に取り付けられた支持体と、該支持体から左右の両側に水平方向に延設された回転軸と、該回転軸に支持されて鉛直方向に回転可能な撹拌翼を有し、
上記撹拌翼が、上記回転軸から径方向外側に向かって延びる腕部と、該腕部の先端に固着された水平方向に延びるブレード部と、該ブレード部から上記腕部の反対側に向かって延びる複数の撹拌爪を有し、
上記複数の撹拌爪の中の、上記支持体に最も近い撹拌爪が、弾性変形可能な撹拌爪であり、
上記弾性変形可能な撹拌爪がその回転軌跡の上端及びその近傍領域で上記支持体またはフレームに直接、当接しないように、上記支持体またはフレームの周囲に、上記弾性変形可能な撹拌爪を当接させて案内するためのガイド部を有し、
上記弾性変形可能な撹拌爪が、上記ガイド部が配設された場所を通過する時に上記ガイド部の表面から受ける力によって上記フレームの鉛直方向の軸線から遠ざかり、かつ上記ガイド部が配設された場所以外の場所を通過する時に上記フレームの鉛直方向の軸線に近づくように構成されていることを特徴とする地盤改良機。
【請求項2】
上記弾性変形可能な撹拌爪の弾性部分が、ねじりコイルばね、または、板ばねである請求項1に記載の地盤改良機。
【請求項1】
ベースマシンと、該ベースマシンに取り付けられた揺動可能なアームと、該アームの端部から垂下されたフレームと、該フレームの下端に取り付けられた撹拌手段を備えた地盤改良機であって、
上記撹拌手段が、上記フレームの下端に取り付けられた支持体と、該支持体から左右の両側に水平方向に延設された回転軸と、該回転軸に支持されて鉛直方向に回転可能な撹拌翼を有し、
上記撹拌翼が、上記回転軸から径方向外側に向かって延びる腕部と、該腕部の先端に固着された水平方向に延びるブレード部と、該ブレード部から上記腕部の反対側に向かって延びる複数の撹拌爪を有し、
上記複数の撹拌爪の中の、上記支持体に最も近い撹拌爪が、弾性変形可能な撹拌爪であり、
上記弾性変形可能な撹拌爪がその回転軌跡の上端及びその近傍領域で上記支持体またはフレームに直接、当接しないように、上記支持体またはフレームの周囲に、上記弾性変形可能な撹拌爪を当接させて案内するためのガイド部を有し、
上記弾性変形可能な撹拌爪が、上記ガイド部が配設された場所を通過する時に上記ガイド部の表面から受ける力によって上記フレームの鉛直方向の軸線から遠ざかり、かつ上記ガイド部が配設された場所以外の場所を通過する時に上記フレームの鉛直方向の軸線に近づくように構成されていることを特徴とする地盤改良機。
【請求項2】
上記弾性変形可能な撹拌爪の弾性部分が、ねじりコイルばね、または、板ばねである請求項1に記載の地盤改良機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−57208(P2013−57208A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−196444(P2011−196444)
【出願日】平成23年9月8日(2011.9.8)
【出願人】(000185972)小野田ケミコ株式会社 (58)
【出願人】(000177416)三和機材株式会社 (144)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月8日(2011.9.8)
【出願人】(000185972)小野田ケミコ株式会社 (58)
【出願人】(000177416)三和機材株式会社 (144)
【Fターム(参考)】
[ Back to top ]