
地盤施工機およびその工具駆動制御方法
【課題】複数の変速段から最適な変速段を自動的に選択して工具を安定的に回転駆動することのできる地盤施工機およびその工具駆動制御方法を提供する。
【解決手段】回転駆動される工具と、可変容量の油圧モータを複数備えた駆動部8と、油圧モータに供給される流体の供給側と排出側の圧力差を検出するための検出器86,87と、駆動部の複数の変速段のいずれかを自動的に選択して駆動部を駆動制御する駆動制御部80とを有し、駆動制御部は、圧力差によって変速段の選択を行うものであり、変速段移行のための圧力差の基準値と基準時間とがそれぞれの変速段移行に対して設定されており、圧力差が変速段を低速側に移行するための基準値以上である状態が基準時間以上連続した場合に、変速段を低速側に移行するものであり、圧力差が変速段を高速側に移行するための基準値以下である状態が基準時間以上連続した場合に、変速段を高速側に移行するものである。
【解決手段】回転駆動される工具と、可変容量の油圧モータを複数備えた駆動部8と、油圧モータに供給される流体の供給側と排出側の圧力差を検出するための検出器86,87と、駆動部の複数の変速段のいずれかを自動的に選択して駆動部を駆動制御する駆動制御部80とを有し、駆動制御部は、圧力差によって変速段の選択を行うものであり、変速段移行のための圧力差の基準値と基準時間とがそれぞれの変速段移行に対して設定されており、圧力差が変速段を低速側に移行するための基準値以上である状態が基準時間以上連続した場合に、変速段を低速側に移行するものであり、圧力差が変速段を高速側に移行するための基準値以下である状態が基準時間以上連続した場合に、変速段を高速側に移行するものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、オーガスクリューや撹拌工具などの工具を回転駆動して地盤に対して掘削や地盤改良の施工を行う地盤施工機およびその工具駆動制御方法に関する。さらに詳しくは、複数の変速段が設定された駆動部の最適な変速段を自動的に選択して工具を回転駆動することのできる地盤施工機およびその工具駆動制御方法に関する。
【背景技術】
【0002】
オーガスクリューを回転駆動して地盤の掘削を行ったり、撹拌工具を回転駆動して地盤改良を行ったりする地盤施工機は従来から使用されていた。例えば、地盤の掘削を行う場合、掘削を行う地盤の状態(柔らかい、固いなど)に応じて工具(オーガスクリュー)の駆動トルクおよび回転速度を適切な値に設定する必要がある。
【0003】
地盤施工機において、工具の駆動トルクと回転速度の関係がそれぞれ異なる複数の変速段を設定しておき、地盤の状態に応じて作業者がそれらの変速段から最も適切なものを選択するような技術は以前から知られていた。下記の特許文献1には、作業者の入力情報により複数の変速段から適切なものを選択して掘削を行うようにした杭施工機が記載されている。また、特許文献1には、変速段の選択を自動的に行うようにして、掘削過程で地盤状態が変化してもそれに対応して変速段を自動的に変更することも記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−240503号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
地盤施工機において、地盤の状態に応じて作業者が複数の変速段から最適な変速段を選択するようなものでは、作業者が的確に地盤の状態を認識し、どの変速段が適切であるかを的確に判断しなければならなかった。このため、作業者に高度の熟練が求められ、誰でも簡単に地盤施工機を扱える訳ではなかった。また、特許文献1のように変速段の選択を自動的に行うという技術思想もあるが、実用的な地盤施工機を実現するのはなかなか困難であった。
【0006】
特に、特許文献1のように現在の工具の駆動トルクだけから最適な変速段を選択するようにすると、変速した瞬間に駆動トルクが急激に変動し、そのトルク変動によってさらなる変速が発生してしまうことが多い。そのような場合、変速段が短時間で多数の変更を繰り返し、変速制御が安定しないことがある。また、それにより工具自体にも振動が発生して工具や地盤施工機が損傷してしまうおそれがある。
【0007】
そこで、本発明は、そのような変速段の自動変更制御の不安定さをなくし、複数の変速段から最適な変速段を自動的に選択して工具を安定的に回転駆動することのできる地盤施工機およびその工具駆動制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の地盤施工機は、回転駆動により地盤に対して施工するための工具と、出力軸の駆動トルクと回転速度との関係が変更可能な油圧モータを複数備え、前記工具を回転駆動するための駆動部と、前記油圧モータに供給される流体の供給側の圧力と前記油圧モータから排出される流体の圧力との圧力差を検出するための検出器と、前記駆動部の駆動トルクと回転速度の関係がそれぞれ異なる複数の変速段のいずれかを自動的に選択して前記駆動部を駆動制御する駆動制御部とを有し、前記駆動制御部は、前記圧力差によって前記変速段の選択を行うものであり、前記変速段から隣接する上下の変速段に移行するための前記圧力差の基準値がそれぞれの変速段移行に対して設定されているとともに、前記変速段から隣接する上下の変速段に移行するための基準時間がそれぞれの変速段移行に対して設定されており、前記圧力差が変速段を低速側に移行するための基準値以上である状態がその変速段移行のための基準時間以上連続した場合に、前記変速段を低速側に移行するものであり、前記圧力差が変速段を高速側に移行するための基準値以下である状態がその変速段移行のための基準時間以上連続した場合に、前記変速段を高速側に移行するものである。
【0009】
また、上記の地盤施工機において、前記変速段は、1速から5速の5段階に設定されたものとすることができる。
【0010】
また、上記の地盤施工機において、前記変速段の移行は、1速から3速までの低速段の範囲で自動的に移行する低速自動移行モードと、4速から5速までの高速段の範囲で自動的に移行する高速自動移行モードと、1速から5速までの全範囲で自動的に移行する完全自動移行モードの各移行モードを選択可能なものであることが好ましい。
【0011】
また、上記の地盤施工機において、前記低速自動移行モード、前記高速自動移行モードおよび前記完全自動移行モードの各モードは、各モードの開始時の変速段を指定することが可能なものであることが好ましい。
【0012】
また、上記の地盤施工機において、前記駆動制御部は、前記変速段の低速側移行を制限するために最低値を設定することが可能なものであることが好ましい。
【0013】
また、上記の地盤施工機において、前記駆動制御部は、前記変速段を手動で指定して、それ以後その変速段を維持することが可能なものであることが好ましい。
【0014】
また、本発明の地盤施工機の工具駆動制御方法は、回転駆動により地盤に対して施工するための工具と、出力軸の駆動トルクと回転速度との関係が変更可能な油圧モータを複数備え、前記工具を回転駆動するための駆動部と、前記油圧モータに供給される流体の供給側の圧力と排出側の圧力を検出するための検出器と、前記駆動部の駆動トルクと回転速度の関係がそれぞれ異なる複数の変速段のいずれかを選択して前記駆動部を駆動制御する駆動制御部とを有する地盤施工機における工具駆動制御方法であって、前記油圧モータに供給される流体の供給側の圧力と排出側の圧力との圧力差を検出する手順と、前記圧力差が現在の変速段を低速側に移行するための基準値以上である状態がその変速段移行のための基準時間以上連続した場合に、現在の変速段を低速側の隣接する変速段に移行する手順と、前記圧力差が現在の変速段を高速側に移行するための基準値以下である状態がその変速段移行のための基準時間以上連続した場合に、現在の変速段を高速側の隣接する変速段に移行する手順とを有するものである。
【発明の効果】
【0015】
本発明は、以上のように構成されているので、以下のような効果を奏する。
【0016】
油圧モータに供給される流体の供給側と排出側との圧力差の検出値に加えて、その検出値と基準値との関係が持続する時間をも考慮して自動変速制御を行うことにより、非常に安定した自動変速制御を行うことができる。また、工具や地盤施工機に異常な振動が発生することを防止して、地盤施工機の安全性や信頼性を向上させることができる。
【図面の簡単な説明】
【0017】
【図1】図1は、本発明の地盤施工機1の全体構成を示す概略図である。
【図2】図2は、回転駆動装置8の構成を示す模式図である。
【図3】図3は、回転駆動装置8の各変速段の設定を示す図である。
【図4】図4は、変速段移行のための基準値Sと基準時間Tを示す図である。
【図5】図5は、自動変速モードの処理手順を示すフローチャートである。
【図6】図6は、高速移行サブルーチンの処理手順を示すフローチャートである。
【図7】図7は、低速移行サブルーチンの処理手順を示すフローチャートである。
【図8】図8は、変速範囲サブルーチンの処理手順を示すフローチャートである。
【発明を実施するための形態】
【0018】
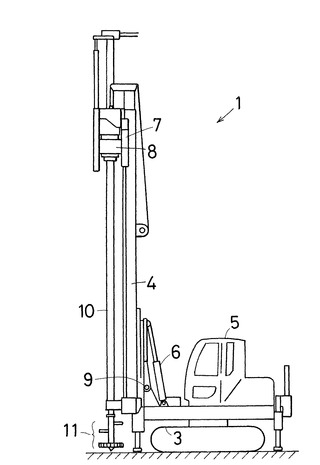
図1は、本発明の地盤施工機1の全体構成を示す概略図である。地盤施工機1は、無端状の軌道帯輪3を有し、自走可能な構成になっている。リーダ4は工具11を支持し案内するための支柱である。リーダ4は、地盤に対して垂直な状態から水平な状態まで起伏動作が可能であるとともに、運転台5と一緒に旋回できる構成になっている。地盤施工機1を移動・運搬するときは、リーダ4を水平状態に倒し、本体の上部に水平状態で保持して移動する。リーダ4は支点9を中心に揺動可能に支持されており、運転台5での操作により油圧シリンダ6を動作させてリーダ4の起伏動作が行われる。
【0019】
このリーダ4を起立させた状態で、リーダ4上を上下方向に移動可能にフィードテーブル7が設けられており、フィードテーブル7には回転駆動装置8が固定されている。回転駆動装置8は先端側に工具11を固定したチューブ体10を回転駆動するためのものである。チューブ体10は中空の管状の部材であり、内部の中空部を通して地盤改良剤などを地盤中に注入することができる。チューブ体10の先端側(下方側)には掘削具や撹拌工具等の工具11が固定されている。
【0020】
フィードテーブル7は、図示しない駆動機構によりリーダ4上を上下方向に移動することができる。フィードテーブル7が移動されれば、回転駆動装置8とともにチューブ体10および工具11も同じ量だけ移動される。例えば、工具11として下端側の掘削工具と撹拌工具を備えたものを使用し、チューブ体10を回転駆動しながら下降させて、掘削作業と撹拌による地盤改良作業とを同時に行う。このとき攪拌工具からは地盤改良剤を噴出させて地盤構成物に注入し、この地盤構成物を撹拌して地盤改良を行う。地盤改良剤は、セメントミルク等であり、チューブ体10の中空部を通して供給される。
【0021】
また、地盤施工機1には、オーガースクリュー等の掘削専用工具を取り付けて、掘削作業のみを行う場合もある。このように、地盤施工機1によって地盤改良作業や、掘削作業を行う場合、工具11の駆動トルクおよび回転速度を地盤の状態(柔らかい、固いなど)に応じて適切な値に設定する必要がある。例えば、固い地盤では工具11の駆動トルクを大きく(回転速度を小さく)しなければならず、一方、柔らかい地盤では回転速度を大きく(駆動トルクを小さく)して高能率の掘削作業を行うことができる。
【0022】
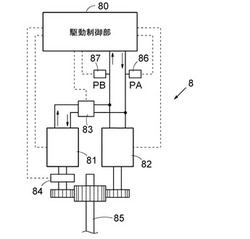
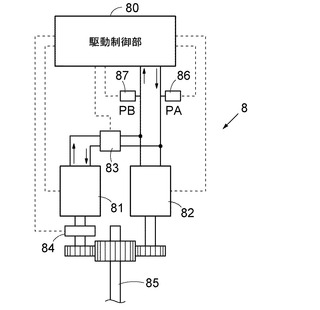
図2は、回転駆動装置8の構成を示す模式図である。チューブ体10および工具11を回転駆動するための回転駆動装置8は、2つの油圧モータ81,82を備えている。それぞれの油圧モータ81,82は可変容量型の油圧モータであり、押しのけ容積を大小2段階に変更することができるものである。具体的には、油圧モータ81は大:602[cm3/回転],小:301[cm3/回転]に押しのけ容積を変更可能であり、油圧モータ82は大:304[cm3/回転],小:152[cm3/回転]に押しのけ容積を変更可能である。
【0023】
図示のように、油圧モータ81,82の出力軸は両者とも伝導機構によって駆動軸85に接続されている。この駆動軸85がチューブ体10の回転駆動を行う。このような構成の回転駆動装置8は、油圧モータ81,82のそれぞれの押しのけ容積を変更することにより、押しのけ容積を多段に変更可能な1つの油圧モータと等価な駆動特性とすることができる。すなわち、油圧モータ81,82は、それぞれの押しのけ容積の合計値を押しのけ容積とする1つの油圧モータと等価な駆動特性となる。
【0024】
駆動制御部80は、油圧源からの圧力油を油圧モータ81,82に供給して、駆動軸85を駆動する制御を行う。また、駆動制御部80は、油圧モータ81,82のそれぞれに対して制御用のパイロット圧油を送り、各油圧モータの押しのけ容積を変更制御することができる。また、油圧モータ81を駆動から切り離して、油圧モータ82のみによって駆動軸85を駆動することも可能である。油圧モータ82のみによって駆動する場合、電磁弁83を制御して油圧モータ81への圧力油の供給を遮断するとともに、電磁クラッチ84を制御して油圧モータ81の出力軸と駆動軸85とを切り離す。
【0025】
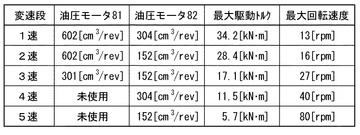
図3に示すように、回転駆動装置8には、油圧モータ81,82の押しのけ容積の変更制御および油圧モータ81の切り離し制御により、「1速」から「5速」までの5段階の変速段が設定されている。「1速」が最も駆動トルクが大きく回転速度が小さい最低速段であり、「5速」が最も駆動トルクが小さく回転速度が大きい最高速段である。
【0026】
それぞれの変速段では、油圧モータ81,82の押しのけ容積の合計値を押しのけ容積とする1つの油圧モータと等価な駆動特性となる。各変速段での油圧モータ81,82の押しのけ容積の合計値は、1速:906[cm3/回転]、2速:754[cm3/回転]、3速:453[cm3/回転]、4速:304[cm3/回転]、5速:152[cm3/回転]となっている。
【0027】
また、それぞれの変速段における最大駆動トルクと最大回転速度は図3に示すようになる。なお、その変速段の最大駆動トルクは回転速度が最小のときに発生し、その変速段の最大回転速度は駆動トルクが最小のときに発生する。すなわち、最大駆動トルクと最大回転速度は同時に発生するものではない。図3から、1速から5速に向かって、駆動トルクが順番に小さくなり、回転速度は順番に大きくなることが分かる。
【0028】
回転駆動装置8は、運転台5からの操作によって、手動変速モード、自動変速モード等の変速段の移行モードを切り換えることができ、地盤の状態や作業者の習熟度に応じた適切な変速段の移行モードを選択することができる。手動変速モードは作業者の変速操作に応じて手動で変速段の移行を行うモードである。手動変速モードは、作業者の手動変速操作に従って変速段の移行を行うので、完全に作業者の意図した通りの変速操作を行うことができる。ただし、複雑な地盤構造において適切な変速段移行を行うためには、作業者に対して高度の熟練が求められる。
【0029】
自動変速モードは駆動制御部80の駆動制御により自動的に変速段の移行を行うモードである。自動変速モードはさらに3つのモードに細分されている。低速自動移行モードは1〜3速の範囲で自動的に変速段の移行を行うモードである。高速自動移行モードは4〜5速の範囲で自動的に変速段の移行を行うモードである。そして、完全自動移行モードは1〜5速の全範囲で自動的に変速段の移行を行うモードである。自動変速モードでは、以上の3つのモードのいずれかを選択することができる。
【0030】
また、これらの全ての自動変速モードにおいて、変速段の低速側移行を制限するための変速下限ラインを設定することが可能である。例えば、変速下限ラインを2−3速間に設定すれば、1速と2速へは移行することができなくなり、3速以上の高速側の変速段のみで自動変速が行われる。そして、これらの自動変速モードにおいては、変速段の初期値を設定することができる。初期値はそれぞれのモードで移行可能な変速段の範囲内で指定することができる。
【0031】
また、手動変速モード、自動変速モードのいずれにおいても、回転駆動装置8が特定の上方位置にある場合に駆動トルクが過大となることを防止するために、変速段の1速が使用できなくなっている。これは、回転駆動装置8が例えば地表から5m以上の位置にある場合、駆動トルクが過大になると、機械の故障や転倒を招くおそれがあるからである。
【0032】
本発明の自動変速モードは、従来の自動変速とは異なる新しい制御内容を取り入れている。従来の自動変速は、特許文献1のように現在の工具の駆動トルクだけから、最適な変速段を選択するようにしていた。このような従来の自動変速では、変速した瞬間に駆動トルクが急激に変動し、そのトルク変動によってさらなる変速が発生してしまうことがあり、変速段が短時間に繰り返し変更されて変速制御が安定しないことがある。また、それにより工具自体にも振動が発生して工具や地盤施工機が損傷してしまうおそれがある。
【0033】
本発明では、駆動制御部80は、現在の工具の駆動トルクに相当する検出値だけでなくその検出値の連続する時間をも考慮して変速制御を行うものである。駆動制御部80からは、油圧モータ81,82に対して圧力油が供給される。その圧力油の供給側の圧力PAと排出側の圧力PBが検出器86,87によって検出され、それらの検出値が駆動制御部80に送られている。駆動制御部80は、油圧モータ81,82に供給される圧力油の供給側の圧力PAと、油圧モータ81,82から排出される圧力油の圧力PBとからそれらの圧力差PC=|PA−PB|を演算し、その圧力差PCに応じて自動的に変速制御を行う。
【0034】
特定の変速段(N速)からそれに隣接する高速側の変速段(N+1速)に移行するための条件は、圧力差PCが基準値S(N,N+1)以下となり、その状態が基準時間T(N,N+1)以上連続することである。また、特定の変速段(N速)からそれに隣接する低速側の変速段(N−1速)に移行するための条件は、前述の圧力差PCが基準値S(N,N−1)以上となり、その状態が基準時間T(N,N−1)以上連続することである。
【0035】
ここで、基準値S(N,N±1)は、変速段:N速→N±1速に移行するための圧力差PCに対する条件となる値であり、図4に示されている。図4の「PC基準値」の欄が基準値S(N,N±1)を示しており、各変速段移行に対応して8種類の基準値が設定されている。基準値S(N,N±1)は、予め既定値が設定されているが、作業者のノウハウ等により8種類のそれぞれの値を変更することもできる。
【0036】
また、基準時間T(N,N±1)は、変速段:N速→N±1速に移行するための圧力差PCの条件が連続する時間に対する基準値である。図4の「基準時間」の欄に示されているように、この基準時間T(N,N±1)も各変速段移行に対応して8種類の値が設定されている。基準時間T(N,N±1)についても、予め既定値が設定されているが、作業者のノウハウ等により8種類のそれぞれの値を変更することもできる。
【0037】
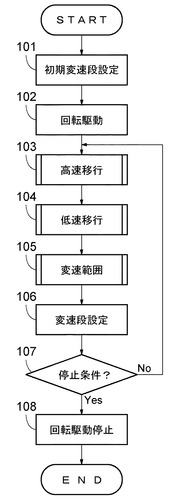
次に、駆動制御部80の自動変速モードの変速制御について具体的に説明する。図5から図8は、駆動制御部80の自動変速モードの処理手順を示すフローチャートである。これらの処理手順はコンピュータプログラムとして実装されており、駆動制御部80に含まれるCPUによって実行される。自動変速モードにおいて作業者が操作盤のスイッチにより回転駆動開始の操作を行うと図5の処理手順が開始される。まず、手順101において、変速段が予め決められている初期値に設定される。すなわち、変速段を示す変数Nにその初期値が入力される。そして、図3に示す各変速段から該当する変速段を選択し、油圧モータ81,82の押しのけ容積、電磁弁83の開閉状態、電磁クラッチ84の接続状態を制御する。
【0038】
次に、手順102において、その変速段の状態で工具の回転駆動が開始される。次に、手順103において、「高速移行」サブルーチンの呼び出し処理を行う。この「高速移行」サブルーチンは、自動変速モードにおいて、現在の変速段をより高速側の変速段に移行するかどうかを判断して決定するためのサブルーチンであり、その詳細は後に説明する。次に、手順104において、「低速移行」サブルーチンの呼び出し処理を行う。この「低速移行」サブルーチンは、自動変速モードにおいて、現在の変速段をより低速側の変速段に移行するかどうかを判断して決定するためのサブルーチンであり、その詳細は後に説明する。
【0039】
次に、手順105において、「変速範囲」サブルーチンの呼び出し処理を行う。この「変速範囲」サブルーチンは、先行する「高速移行」サブルーチンおよび「低速移行」サブルーチンで変更された変速段が、使用可能な変速段の範囲内に収まっているかどうかを判定して、範囲外の変速段になっていた場合には範囲内の変速段に修正するためのサブルーチンである。その詳細は後に説明する。
【0040】
次に、手順106において、手順103〜105で決定された変速段に従って、実際の変速段が設定される。すなわち、図3の各変速段から該当する変速段を選択し、油圧モータ81,82の押しのけ容積、電磁弁83の開閉状態、電磁クラッチ84の接続状態を制御する。なお、手順103〜105で決定された変速段は変数Nに記憶されている。
【0041】
次に、手順107において、工具の回転駆動を停止する条件が成立しているか否かを判断する。停止条件が成立する場合とは、回転駆動のスイッチが停止位置に戻された場合、掘削深さの設定により自動停止する場合、異常トルクや振動などにより異常停止する場合などである。停止条件が成立する場合は手順108に進んで工具の回転駆動を停止させ、以上の処理手順を終了する。手順107において、停止条件が成立しない場合には、手順103に戻り、手順103〜107を繰り返す。すなわち、自動変速モードでの回転駆動を続行する。
【0042】
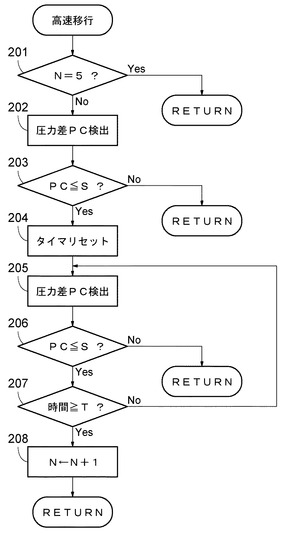
図6は、手順103で呼び出される「高速移行」サブルーチンの処理手順を示すフローチャートである。「高速移行」サブルーチンは、現在の変速段をより高速側の変速段に移行するかどうかを判断して決定するためのサブルーチンである。「高速移行」サブルーチンが呼び出されると、まず、手順201において、現在の変速段Nが最高速の5速であるか否かを判断する。現在の変速段Nが5速である場合には、何もせずに呼び出しもとに戻る。変速段Nが5速でない場合には、次の手順202に進む。
【0043】
手順202では、油圧モータの圧力油の供給側と排出側の圧力差PCを検出する。具体的には、検出器86による供給側圧力PAと検出器87による排出側圧力PBとを検出して、それらの圧力PA,PBから圧力差PCを演算する。なお、回転方向が正方向の場合に、検出器86が供給側、検出器87が排出側となるが、回転方向が逆方向の場合には、検出器86が排出側、検出器87が供給側となる。しかし、圧力PA,PBから圧力差PCを求めているので、回転方向が正方向、逆方向のいずれの場合でも制御可能である。
【0044】
次に、手順203において、圧力差PCと基準値S(N,N+1)が比較される。基準値S(N,N+1)はN速→N+1速に移行するための基準値であり、図4に示されている。図4に示された基準値の中から現在の変速段Nに該当する基準値を選択して圧力差PCと比較するのである。圧力差PCが基準値S(N,N+1)以下である場合には次の手順204に進み、そうでない場合は変速段移行の処理を行わずに呼び出しもとに戻る。
【0045】
次に、手順204において、駆動制御部80に内蔵されたタイマをリセットして時間測定を開始する。このタイマは圧力差PCが基準値S(N,N+1)以下である状態が連続する時間を測定するためのものである。次に、手順205において、油圧モータの圧力油の供給側と排出側の圧力差PCを再度検出する。そして、手順206において、圧力差PCと基準値S(N,N+1)が比較される。圧力差PCが基準値S(N,N+1)以下である場合には次の手順207に進み、そうでない場合は変速段移行の処理を行わずに呼び出しもとに戻る。
【0046】
手順207では、タイマで測定中の時間が基準時間T(N,N+1)と比較される。基準時間T(N,N+1)はN速→N+1速に移行するための基準時間であり、図4に示されている。図4に示された基準時間の中から現在の変速段Nに該当する基準時間を選択してタイマの時間と比較するのである。手順207でタイマの時間が基準時間T(N,N+1)以上となれば手順208に進み、そうでなければ手順205に戻る。
【0047】
すなわち、手順205〜207を繰り返すことにより、圧力差PCが基準値S(N,N+1)以下である状態が基準時間T(N,N+1)以上連続したかどうかを判定するのである。基準時間T(N,N+1)以上連続した場合には手順208において変数Nの値を1だけ増加させる。すなわち1段高速側の変速段の値を変数Nに記憶させる。そして呼び出しもとに戻る。
【0048】
圧力差PCが基準値S(N,N+1)以下である状態が基準時間T(N,N+1)以上連続しなかった場合には、手順206の判定で「No」となり、変速段移行の処理を行わずに呼び出しもとに戻る。
【0049】
以上の「高速移行」サブルーチンで、変数Nが変更されても、直ちに変速段の変更制御が行われるわけではなく、さらに図5の手順105で処理された後、手順106において変数Nに記憶されている変速段の値により、実際の変速段が設定される。
【0050】
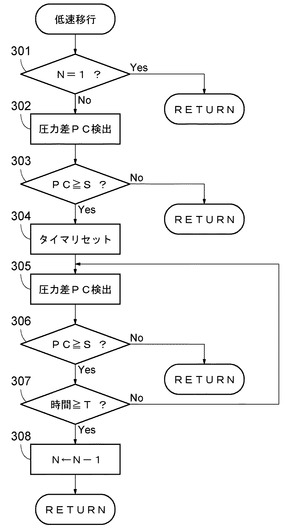
図7は、手順104で呼び出される「低速移行」サブルーチンの処理手順を示すフローチャートである。「低速移行」サブルーチンは、現在の変速段をより低速側の変速段に移行するかどうかを判断して決定するためのサブルーチンである。「低速移行」サブルーチンが呼び出されると、まず、手順301において、現在の変速段Nが最低速の1速であるか否かを判断する。現在の変速段Nが1速である場合には、何もせずに呼び出しもとに戻る。変速段Nが1速でない場合には、次の手順302に進む。
【0051】
手順302では、油圧モータの圧力油の供給側と排出側の圧力差PCを検出する。具体的には、検出器86による供給側圧力PAと検出器87による排出側圧力PBとを検出して、それらの圧力PA,PBから圧力差PCを演算する。
【0052】
次に、手順303において、圧力差PCと基準値S(N,N−1)が比較される。基準値S(N,N−1)はN速→N−1速に移行するための基準値であり、図4に示されている。図4に示された基準値の中から現在の変速段Nに該当する基準値を選択して圧力差PCと比較するのである。圧力差PCが基準値S(N,N−1)以上である場合には次の手順304に進み、そうでない場合は変速段移行の処理を行わずに呼び出しもとに戻る。
【0053】
次に、手順304において、駆動制御部80に内蔵されたタイマをリセットして時間測定を開始する。このタイマは圧力差PCが基準値S(N,N−1)以上である状態が連続する時間を測定するためのものである。次に、手順305において、油圧モータの圧力油の供給側と排出側の圧力差PCを再度検出する。そして、手順306において、圧力差PCと基準値S(N,N−1)が比較される。圧力差PCが基準値S(N,N−1)以上である場合には次の手順307に進み、そうでない場合は変速段移行の処理を行わずに呼び出しもとに戻る。
【0054】
手順307では、タイマで測定中の時間が基準時間T(N,N−1)と比較される。基準時間T(N,N−1)はN速→N−1速に移行するための基準時間であり、図4に示されている。図4に示された基準時間の中から現在の変速段Nに該当する基準時間を選択してタイマの時間と比較するのである。手順307でタイマの時間が基準時間T(N,N−1)以上となれば手順308に進み、そうでなければ手順305に戻る。
【0055】
すなわち、手順305〜307を繰り返すことにより、圧力差PCが基準値S(N,N−1)以上である状態が基準時間T(N,N−1)以上連続したかどうかを判定するのである。基準時間T(N,N−1)以上連続した場合には手順308において変数Nの値を1だけ減少させる。すなわち1段低速側の変速段の値を変数Nに記憶させる。そして呼び出しもとに戻る。
【0056】
圧力差PCが基準値S(N,N−1)以上である状態が基準時間T(N,N−1)以上連続しなかった場合には、手順306の判定で「No」となり、変速段移行の処理を行わずに呼び出しもとに戻る。
【0057】
以上の「低速移行」サブルーチンで、変数Nが変更されても、直ちに変速段の変更制御が行われるわけではなく、さらに図5の手順105で処理された後、手順106において変数Nに記憶されている変速段の値により、実際の変速段が設定される。
【0058】
図8は、手順105で呼び出される「変速範囲」サブルーチンの処理手順を示すフローチャートである。この「変速範囲」サブルーチンは、前述の「高速移行」サブルーチンおよび「低速移行」サブルーチンで変更された変速段の変数値が、使用可能な変速段の範囲内に収まっているかどうかを判定して、範囲外の変速段になっていた場合には範囲内の変速段に修正するためのサブルーチンである。
【0059】
「変速範囲」サブルーチンが呼び出されると、まず、手順401において、使用可能な変速段の範囲を規定する変速段の最低値と最高値とを設定する。使用可能な変速段の範囲とは、例えば、低速自動移行モードでは1〜3速の範囲であり、高速自動移行モードは4〜5速の範囲である。すなわち、低速自動移行モードでは、使用可能な変速段の最低値が1とされ最高値が3とされる。高速自動移行モードでは変速段の最低値が4とされ最高値が5とされる。そして、完全自動移行モードでは変速段の最低値が1とされ最高値が5とされる。
【0060】
また、これらの全ての自動変速モードにおいて、変速下限ラインが設定されている場合、この変速下限ラインも最低値に反映される。例えば、変速下限ラインが2−3速間に設定されている場合、最低値が3以上となるように調整される。自動変速モードの最低値が1であっても最低値が3に修正され、最低値が4であればそのままとされる。そして、さらに特定の上方位置における変速段1速制限も考慮される。1速制限が適用される場合には、最低値が2以上となるように調整される。
【0061】
次に、手順402において、移行後の変速段を示す変数Nの値が最低値よりも小さいか否かが判断される。変数Nの値が最低値よりも小さい場合は手順403に進み、そうでない場合は手順403を跳び越して手順404に進む。手順403では、変数Nに最低値が代入され、変速段が最低値を超えて下がらないように調整される。
【0062】
次に、手順404において、変数Nの値が最高値よりも大きいか否かが判断される。変数Nの値が最高値よりも大きい場合は手順405に進み、そうでない場合は手順405を跳び越して呼び出しもとに戻る。手順405では、変数Nに最高値が代入され、変速段が最高値を超えて上がらないように調整される。そして、呼び出しもとに戻る。
【0063】
以上の図5から図8に示すような処理手順によって自動変速制御を行うことにより、現在の工具の駆動トルクに相当する検出値に加えて、その検出値と基準値との関係が持続する時間をも考慮して自動変速制御を行うことができ、非常に安定した自動変速制御を実現することができる。また、工具や地盤施工機に異常な振動が発生することを防止して、安全で信頼性の高い地盤施工機を実現することができる。
【0064】
以上のように、本発明によれば、現在の工具の駆動トルクに相当する検出値に加えて、その検出値と基準値との関係が持続する時間をも考慮して自動変速制御を行うことにより非常に安定した自動変速制御を行うことが可能な地盤施工機およびその工具駆動制御方法を提供することができる。また、工具や地盤施工機に異常な振動が発生することを防止して、安全で信頼性の高い地盤施工機を提供することができる。
【産業上の利用可能性】
【0065】
本発明の地盤施工機およびその工具駆動制御方法は、現在の工具の駆動トルクに相当する検出値に加えて、その検出値と基準値との関係が持続する時間をも考慮して自動変速制御を行うことにより非常に安定した自動変速制御を提供することができる。また、工具や地盤施工機に異常な振動が発生することを防止して、安全で信頼性の高い地盤施工機を提供することができる。
【符号の説明】
【0066】
1 地盤施工機
3 軌道帯輪
4 リーダ
5 運転台
6 油圧シリンダ
7 フィードテーブル
8 回転駆動装置
9 支点
10 チューブ体
11 工具
80 駆動制御部
81,82 油圧モータ
83 電磁弁
84 電磁クラッチ
85 駆動軸
86,87 検出器
【技術分野】
【0001】
本発明は、オーガスクリューや撹拌工具などの工具を回転駆動して地盤に対して掘削や地盤改良の施工を行う地盤施工機およびその工具駆動制御方法に関する。さらに詳しくは、複数の変速段が設定された駆動部の最適な変速段を自動的に選択して工具を回転駆動することのできる地盤施工機およびその工具駆動制御方法に関する。
【背景技術】
【0002】
オーガスクリューを回転駆動して地盤の掘削を行ったり、撹拌工具を回転駆動して地盤改良を行ったりする地盤施工機は従来から使用されていた。例えば、地盤の掘削を行う場合、掘削を行う地盤の状態(柔らかい、固いなど)に応じて工具(オーガスクリュー)の駆動トルクおよび回転速度を適切な値に設定する必要がある。
【0003】
地盤施工機において、工具の駆動トルクと回転速度の関係がそれぞれ異なる複数の変速段を設定しておき、地盤の状態に応じて作業者がそれらの変速段から最も適切なものを選択するような技術は以前から知られていた。下記の特許文献1には、作業者の入力情報により複数の変速段から適切なものを選択して掘削を行うようにした杭施工機が記載されている。また、特許文献1には、変速段の選択を自動的に行うようにして、掘削過程で地盤状態が変化してもそれに対応して変速段を自動的に変更することも記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−240503号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
地盤施工機において、地盤の状態に応じて作業者が複数の変速段から最適な変速段を選択するようなものでは、作業者が的確に地盤の状態を認識し、どの変速段が適切であるかを的確に判断しなければならなかった。このため、作業者に高度の熟練が求められ、誰でも簡単に地盤施工機を扱える訳ではなかった。また、特許文献1のように変速段の選択を自動的に行うという技術思想もあるが、実用的な地盤施工機を実現するのはなかなか困難であった。
【0006】
特に、特許文献1のように現在の工具の駆動トルクだけから最適な変速段を選択するようにすると、変速した瞬間に駆動トルクが急激に変動し、そのトルク変動によってさらなる変速が発生してしまうことが多い。そのような場合、変速段が短時間で多数の変更を繰り返し、変速制御が安定しないことがある。また、それにより工具自体にも振動が発生して工具や地盤施工機が損傷してしまうおそれがある。
【0007】
そこで、本発明は、そのような変速段の自動変更制御の不安定さをなくし、複数の変速段から最適な変速段を自動的に選択して工具を安定的に回転駆動することのできる地盤施工機およびその工具駆動制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の地盤施工機は、回転駆動により地盤に対して施工するための工具と、出力軸の駆動トルクと回転速度との関係が変更可能な油圧モータを複数備え、前記工具を回転駆動するための駆動部と、前記油圧モータに供給される流体の供給側の圧力と前記油圧モータから排出される流体の圧力との圧力差を検出するための検出器と、前記駆動部の駆動トルクと回転速度の関係がそれぞれ異なる複数の変速段のいずれかを自動的に選択して前記駆動部を駆動制御する駆動制御部とを有し、前記駆動制御部は、前記圧力差によって前記変速段の選択を行うものであり、前記変速段から隣接する上下の変速段に移行するための前記圧力差の基準値がそれぞれの変速段移行に対して設定されているとともに、前記変速段から隣接する上下の変速段に移行するための基準時間がそれぞれの変速段移行に対して設定されており、前記圧力差が変速段を低速側に移行するための基準値以上である状態がその変速段移行のための基準時間以上連続した場合に、前記変速段を低速側に移行するものであり、前記圧力差が変速段を高速側に移行するための基準値以下である状態がその変速段移行のための基準時間以上連続した場合に、前記変速段を高速側に移行するものである。
【0009】
また、上記の地盤施工機において、前記変速段は、1速から5速の5段階に設定されたものとすることができる。
【0010】
また、上記の地盤施工機において、前記変速段の移行は、1速から3速までの低速段の範囲で自動的に移行する低速自動移行モードと、4速から5速までの高速段の範囲で自動的に移行する高速自動移行モードと、1速から5速までの全範囲で自動的に移行する完全自動移行モードの各移行モードを選択可能なものであることが好ましい。
【0011】
また、上記の地盤施工機において、前記低速自動移行モード、前記高速自動移行モードおよび前記完全自動移行モードの各モードは、各モードの開始時の変速段を指定することが可能なものであることが好ましい。
【0012】
また、上記の地盤施工機において、前記駆動制御部は、前記変速段の低速側移行を制限するために最低値を設定することが可能なものであることが好ましい。
【0013】
また、上記の地盤施工機において、前記駆動制御部は、前記変速段を手動で指定して、それ以後その変速段を維持することが可能なものであることが好ましい。
【0014】
また、本発明の地盤施工機の工具駆動制御方法は、回転駆動により地盤に対して施工するための工具と、出力軸の駆動トルクと回転速度との関係が変更可能な油圧モータを複数備え、前記工具を回転駆動するための駆動部と、前記油圧モータに供給される流体の供給側の圧力と排出側の圧力を検出するための検出器と、前記駆動部の駆動トルクと回転速度の関係がそれぞれ異なる複数の変速段のいずれかを選択して前記駆動部を駆動制御する駆動制御部とを有する地盤施工機における工具駆動制御方法であって、前記油圧モータに供給される流体の供給側の圧力と排出側の圧力との圧力差を検出する手順と、前記圧力差が現在の変速段を低速側に移行するための基準値以上である状態がその変速段移行のための基準時間以上連続した場合に、現在の変速段を低速側の隣接する変速段に移行する手順と、前記圧力差が現在の変速段を高速側に移行するための基準値以下である状態がその変速段移行のための基準時間以上連続した場合に、現在の変速段を高速側の隣接する変速段に移行する手順とを有するものである。
【発明の効果】
【0015】
本発明は、以上のように構成されているので、以下のような効果を奏する。
【0016】
油圧モータに供給される流体の供給側と排出側との圧力差の検出値に加えて、その検出値と基準値との関係が持続する時間をも考慮して自動変速制御を行うことにより、非常に安定した自動変速制御を行うことができる。また、工具や地盤施工機に異常な振動が発生することを防止して、地盤施工機の安全性や信頼性を向上させることができる。
【図面の簡単な説明】
【0017】
【図1】図1は、本発明の地盤施工機1の全体構成を示す概略図である。
【図2】図2は、回転駆動装置8の構成を示す模式図である。
【図3】図3は、回転駆動装置8の各変速段の設定を示す図である。
【図4】図4は、変速段移行のための基準値Sと基準時間Tを示す図である。
【図5】図5は、自動変速モードの処理手順を示すフローチャートである。
【図6】図6は、高速移行サブルーチンの処理手順を示すフローチャートである。
【図7】図7は、低速移行サブルーチンの処理手順を示すフローチャートである。
【図8】図8は、変速範囲サブルーチンの処理手順を示すフローチャートである。
【発明を実施するための形態】
【0018】
図1は、本発明の地盤施工機1の全体構成を示す概略図である。地盤施工機1は、無端状の軌道帯輪3を有し、自走可能な構成になっている。リーダ4は工具11を支持し案内するための支柱である。リーダ4は、地盤に対して垂直な状態から水平な状態まで起伏動作が可能であるとともに、運転台5と一緒に旋回できる構成になっている。地盤施工機1を移動・運搬するときは、リーダ4を水平状態に倒し、本体の上部に水平状態で保持して移動する。リーダ4は支点9を中心に揺動可能に支持されており、運転台5での操作により油圧シリンダ6を動作させてリーダ4の起伏動作が行われる。
【0019】
このリーダ4を起立させた状態で、リーダ4上を上下方向に移動可能にフィードテーブル7が設けられており、フィードテーブル7には回転駆動装置8が固定されている。回転駆動装置8は先端側に工具11を固定したチューブ体10を回転駆動するためのものである。チューブ体10は中空の管状の部材であり、内部の中空部を通して地盤改良剤などを地盤中に注入することができる。チューブ体10の先端側(下方側)には掘削具や撹拌工具等の工具11が固定されている。
【0020】
フィードテーブル7は、図示しない駆動機構によりリーダ4上を上下方向に移動することができる。フィードテーブル7が移動されれば、回転駆動装置8とともにチューブ体10および工具11も同じ量だけ移動される。例えば、工具11として下端側の掘削工具と撹拌工具を備えたものを使用し、チューブ体10を回転駆動しながら下降させて、掘削作業と撹拌による地盤改良作業とを同時に行う。このとき攪拌工具からは地盤改良剤を噴出させて地盤構成物に注入し、この地盤構成物を撹拌して地盤改良を行う。地盤改良剤は、セメントミルク等であり、チューブ体10の中空部を通して供給される。
【0021】
また、地盤施工機1には、オーガースクリュー等の掘削専用工具を取り付けて、掘削作業のみを行う場合もある。このように、地盤施工機1によって地盤改良作業や、掘削作業を行う場合、工具11の駆動トルクおよび回転速度を地盤の状態(柔らかい、固いなど)に応じて適切な値に設定する必要がある。例えば、固い地盤では工具11の駆動トルクを大きく(回転速度を小さく)しなければならず、一方、柔らかい地盤では回転速度を大きく(駆動トルクを小さく)して高能率の掘削作業を行うことができる。
【0022】
図2は、回転駆動装置8の構成を示す模式図である。チューブ体10および工具11を回転駆動するための回転駆動装置8は、2つの油圧モータ81,82を備えている。それぞれの油圧モータ81,82は可変容量型の油圧モータであり、押しのけ容積を大小2段階に変更することができるものである。具体的には、油圧モータ81は大:602[cm3/回転],小:301[cm3/回転]に押しのけ容積を変更可能であり、油圧モータ82は大:304[cm3/回転],小:152[cm3/回転]に押しのけ容積を変更可能である。
【0023】
図示のように、油圧モータ81,82の出力軸は両者とも伝導機構によって駆動軸85に接続されている。この駆動軸85がチューブ体10の回転駆動を行う。このような構成の回転駆動装置8は、油圧モータ81,82のそれぞれの押しのけ容積を変更することにより、押しのけ容積を多段に変更可能な1つの油圧モータと等価な駆動特性とすることができる。すなわち、油圧モータ81,82は、それぞれの押しのけ容積の合計値を押しのけ容積とする1つの油圧モータと等価な駆動特性となる。
【0024】
駆動制御部80は、油圧源からの圧力油を油圧モータ81,82に供給して、駆動軸85を駆動する制御を行う。また、駆動制御部80は、油圧モータ81,82のそれぞれに対して制御用のパイロット圧油を送り、各油圧モータの押しのけ容積を変更制御することができる。また、油圧モータ81を駆動から切り離して、油圧モータ82のみによって駆動軸85を駆動することも可能である。油圧モータ82のみによって駆動する場合、電磁弁83を制御して油圧モータ81への圧力油の供給を遮断するとともに、電磁クラッチ84を制御して油圧モータ81の出力軸と駆動軸85とを切り離す。
【0025】
図3に示すように、回転駆動装置8には、油圧モータ81,82の押しのけ容積の変更制御および油圧モータ81の切り離し制御により、「1速」から「5速」までの5段階の変速段が設定されている。「1速」が最も駆動トルクが大きく回転速度が小さい最低速段であり、「5速」が最も駆動トルクが小さく回転速度が大きい最高速段である。
【0026】
それぞれの変速段では、油圧モータ81,82の押しのけ容積の合計値を押しのけ容積とする1つの油圧モータと等価な駆動特性となる。各変速段での油圧モータ81,82の押しのけ容積の合計値は、1速:906[cm3/回転]、2速:754[cm3/回転]、3速:453[cm3/回転]、4速:304[cm3/回転]、5速:152[cm3/回転]となっている。
【0027】
また、それぞれの変速段における最大駆動トルクと最大回転速度は図3に示すようになる。なお、その変速段の最大駆動トルクは回転速度が最小のときに発生し、その変速段の最大回転速度は駆動トルクが最小のときに発生する。すなわち、最大駆動トルクと最大回転速度は同時に発生するものではない。図3から、1速から5速に向かって、駆動トルクが順番に小さくなり、回転速度は順番に大きくなることが分かる。
【0028】
回転駆動装置8は、運転台5からの操作によって、手動変速モード、自動変速モード等の変速段の移行モードを切り換えることができ、地盤の状態や作業者の習熟度に応じた適切な変速段の移行モードを選択することができる。手動変速モードは作業者の変速操作に応じて手動で変速段の移行を行うモードである。手動変速モードは、作業者の手動変速操作に従って変速段の移行を行うので、完全に作業者の意図した通りの変速操作を行うことができる。ただし、複雑な地盤構造において適切な変速段移行を行うためには、作業者に対して高度の熟練が求められる。
【0029】
自動変速モードは駆動制御部80の駆動制御により自動的に変速段の移行を行うモードである。自動変速モードはさらに3つのモードに細分されている。低速自動移行モードは1〜3速の範囲で自動的に変速段の移行を行うモードである。高速自動移行モードは4〜5速の範囲で自動的に変速段の移行を行うモードである。そして、完全自動移行モードは1〜5速の全範囲で自動的に変速段の移行を行うモードである。自動変速モードでは、以上の3つのモードのいずれかを選択することができる。
【0030】
また、これらの全ての自動変速モードにおいて、変速段の低速側移行を制限するための変速下限ラインを設定することが可能である。例えば、変速下限ラインを2−3速間に設定すれば、1速と2速へは移行することができなくなり、3速以上の高速側の変速段のみで自動変速が行われる。そして、これらの自動変速モードにおいては、変速段の初期値を設定することができる。初期値はそれぞれのモードで移行可能な変速段の範囲内で指定することができる。
【0031】
また、手動変速モード、自動変速モードのいずれにおいても、回転駆動装置8が特定の上方位置にある場合に駆動トルクが過大となることを防止するために、変速段の1速が使用できなくなっている。これは、回転駆動装置8が例えば地表から5m以上の位置にある場合、駆動トルクが過大になると、機械の故障や転倒を招くおそれがあるからである。
【0032】
本発明の自動変速モードは、従来の自動変速とは異なる新しい制御内容を取り入れている。従来の自動変速は、特許文献1のように現在の工具の駆動トルクだけから、最適な変速段を選択するようにしていた。このような従来の自動変速では、変速した瞬間に駆動トルクが急激に変動し、そのトルク変動によってさらなる変速が発生してしまうことがあり、変速段が短時間に繰り返し変更されて変速制御が安定しないことがある。また、それにより工具自体にも振動が発生して工具や地盤施工機が損傷してしまうおそれがある。
【0033】
本発明では、駆動制御部80は、現在の工具の駆動トルクに相当する検出値だけでなくその検出値の連続する時間をも考慮して変速制御を行うものである。駆動制御部80からは、油圧モータ81,82に対して圧力油が供給される。その圧力油の供給側の圧力PAと排出側の圧力PBが検出器86,87によって検出され、それらの検出値が駆動制御部80に送られている。駆動制御部80は、油圧モータ81,82に供給される圧力油の供給側の圧力PAと、油圧モータ81,82から排出される圧力油の圧力PBとからそれらの圧力差PC=|PA−PB|を演算し、その圧力差PCに応じて自動的に変速制御を行う。
【0034】
特定の変速段(N速)からそれに隣接する高速側の変速段(N+1速)に移行するための条件は、圧力差PCが基準値S(N,N+1)以下となり、その状態が基準時間T(N,N+1)以上連続することである。また、特定の変速段(N速)からそれに隣接する低速側の変速段(N−1速)に移行するための条件は、前述の圧力差PCが基準値S(N,N−1)以上となり、その状態が基準時間T(N,N−1)以上連続することである。
【0035】
ここで、基準値S(N,N±1)は、変速段:N速→N±1速に移行するための圧力差PCに対する条件となる値であり、図4に示されている。図4の「PC基準値」の欄が基準値S(N,N±1)を示しており、各変速段移行に対応して8種類の基準値が設定されている。基準値S(N,N±1)は、予め既定値が設定されているが、作業者のノウハウ等により8種類のそれぞれの値を変更することもできる。
【0036】
また、基準時間T(N,N±1)は、変速段:N速→N±1速に移行するための圧力差PCの条件が連続する時間に対する基準値である。図4の「基準時間」の欄に示されているように、この基準時間T(N,N±1)も各変速段移行に対応して8種類の値が設定されている。基準時間T(N,N±1)についても、予め既定値が設定されているが、作業者のノウハウ等により8種類のそれぞれの値を変更することもできる。
【0037】
次に、駆動制御部80の自動変速モードの変速制御について具体的に説明する。図5から図8は、駆動制御部80の自動変速モードの処理手順を示すフローチャートである。これらの処理手順はコンピュータプログラムとして実装されており、駆動制御部80に含まれるCPUによって実行される。自動変速モードにおいて作業者が操作盤のスイッチにより回転駆動開始の操作を行うと図5の処理手順が開始される。まず、手順101において、変速段が予め決められている初期値に設定される。すなわち、変速段を示す変数Nにその初期値が入力される。そして、図3に示す各変速段から該当する変速段を選択し、油圧モータ81,82の押しのけ容積、電磁弁83の開閉状態、電磁クラッチ84の接続状態を制御する。
【0038】
次に、手順102において、その変速段の状態で工具の回転駆動が開始される。次に、手順103において、「高速移行」サブルーチンの呼び出し処理を行う。この「高速移行」サブルーチンは、自動変速モードにおいて、現在の変速段をより高速側の変速段に移行するかどうかを判断して決定するためのサブルーチンであり、その詳細は後に説明する。次に、手順104において、「低速移行」サブルーチンの呼び出し処理を行う。この「低速移行」サブルーチンは、自動変速モードにおいて、現在の変速段をより低速側の変速段に移行するかどうかを判断して決定するためのサブルーチンであり、その詳細は後に説明する。
【0039】
次に、手順105において、「変速範囲」サブルーチンの呼び出し処理を行う。この「変速範囲」サブルーチンは、先行する「高速移行」サブルーチンおよび「低速移行」サブルーチンで変更された変速段が、使用可能な変速段の範囲内に収まっているかどうかを判定して、範囲外の変速段になっていた場合には範囲内の変速段に修正するためのサブルーチンである。その詳細は後に説明する。
【0040】
次に、手順106において、手順103〜105で決定された変速段に従って、実際の変速段が設定される。すなわち、図3の各変速段から該当する変速段を選択し、油圧モータ81,82の押しのけ容積、電磁弁83の開閉状態、電磁クラッチ84の接続状態を制御する。なお、手順103〜105で決定された変速段は変数Nに記憶されている。
【0041】
次に、手順107において、工具の回転駆動を停止する条件が成立しているか否かを判断する。停止条件が成立する場合とは、回転駆動のスイッチが停止位置に戻された場合、掘削深さの設定により自動停止する場合、異常トルクや振動などにより異常停止する場合などである。停止条件が成立する場合は手順108に進んで工具の回転駆動を停止させ、以上の処理手順を終了する。手順107において、停止条件が成立しない場合には、手順103に戻り、手順103〜107を繰り返す。すなわち、自動変速モードでの回転駆動を続行する。
【0042】
図6は、手順103で呼び出される「高速移行」サブルーチンの処理手順を示すフローチャートである。「高速移行」サブルーチンは、現在の変速段をより高速側の変速段に移行するかどうかを判断して決定するためのサブルーチンである。「高速移行」サブルーチンが呼び出されると、まず、手順201において、現在の変速段Nが最高速の5速であるか否かを判断する。現在の変速段Nが5速である場合には、何もせずに呼び出しもとに戻る。変速段Nが5速でない場合には、次の手順202に進む。
【0043】
手順202では、油圧モータの圧力油の供給側と排出側の圧力差PCを検出する。具体的には、検出器86による供給側圧力PAと検出器87による排出側圧力PBとを検出して、それらの圧力PA,PBから圧力差PCを演算する。なお、回転方向が正方向の場合に、検出器86が供給側、検出器87が排出側となるが、回転方向が逆方向の場合には、検出器86が排出側、検出器87が供給側となる。しかし、圧力PA,PBから圧力差PCを求めているので、回転方向が正方向、逆方向のいずれの場合でも制御可能である。
【0044】
次に、手順203において、圧力差PCと基準値S(N,N+1)が比較される。基準値S(N,N+1)はN速→N+1速に移行するための基準値であり、図4に示されている。図4に示された基準値の中から現在の変速段Nに該当する基準値を選択して圧力差PCと比較するのである。圧力差PCが基準値S(N,N+1)以下である場合には次の手順204に進み、そうでない場合は変速段移行の処理を行わずに呼び出しもとに戻る。
【0045】
次に、手順204において、駆動制御部80に内蔵されたタイマをリセットして時間測定を開始する。このタイマは圧力差PCが基準値S(N,N+1)以下である状態が連続する時間を測定するためのものである。次に、手順205において、油圧モータの圧力油の供給側と排出側の圧力差PCを再度検出する。そして、手順206において、圧力差PCと基準値S(N,N+1)が比較される。圧力差PCが基準値S(N,N+1)以下である場合には次の手順207に進み、そうでない場合は変速段移行の処理を行わずに呼び出しもとに戻る。
【0046】
手順207では、タイマで測定中の時間が基準時間T(N,N+1)と比較される。基準時間T(N,N+1)はN速→N+1速に移行するための基準時間であり、図4に示されている。図4に示された基準時間の中から現在の変速段Nに該当する基準時間を選択してタイマの時間と比較するのである。手順207でタイマの時間が基準時間T(N,N+1)以上となれば手順208に進み、そうでなければ手順205に戻る。
【0047】
すなわち、手順205〜207を繰り返すことにより、圧力差PCが基準値S(N,N+1)以下である状態が基準時間T(N,N+1)以上連続したかどうかを判定するのである。基準時間T(N,N+1)以上連続した場合には手順208において変数Nの値を1だけ増加させる。すなわち1段高速側の変速段の値を変数Nに記憶させる。そして呼び出しもとに戻る。
【0048】
圧力差PCが基準値S(N,N+1)以下である状態が基準時間T(N,N+1)以上連続しなかった場合には、手順206の判定で「No」となり、変速段移行の処理を行わずに呼び出しもとに戻る。
【0049】
以上の「高速移行」サブルーチンで、変数Nが変更されても、直ちに変速段の変更制御が行われるわけではなく、さらに図5の手順105で処理された後、手順106において変数Nに記憶されている変速段の値により、実際の変速段が設定される。
【0050】
図7は、手順104で呼び出される「低速移行」サブルーチンの処理手順を示すフローチャートである。「低速移行」サブルーチンは、現在の変速段をより低速側の変速段に移行するかどうかを判断して決定するためのサブルーチンである。「低速移行」サブルーチンが呼び出されると、まず、手順301において、現在の変速段Nが最低速の1速であるか否かを判断する。現在の変速段Nが1速である場合には、何もせずに呼び出しもとに戻る。変速段Nが1速でない場合には、次の手順302に進む。
【0051】
手順302では、油圧モータの圧力油の供給側と排出側の圧力差PCを検出する。具体的には、検出器86による供給側圧力PAと検出器87による排出側圧力PBとを検出して、それらの圧力PA,PBから圧力差PCを演算する。
【0052】
次に、手順303において、圧力差PCと基準値S(N,N−1)が比較される。基準値S(N,N−1)はN速→N−1速に移行するための基準値であり、図4に示されている。図4に示された基準値の中から現在の変速段Nに該当する基準値を選択して圧力差PCと比較するのである。圧力差PCが基準値S(N,N−1)以上である場合には次の手順304に進み、そうでない場合は変速段移行の処理を行わずに呼び出しもとに戻る。
【0053】
次に、手順304において、駆動制御部80に内蔵されたタイマをリセットして時間測定を開始する。このタイマは圧力差PCが基準値S(N,N−1)以上である状態が連続する時間を測定するためのものである。次に、手順305において、油圧モータの圧力油の供給側と排出側の圧力差PCを再度検出する。そして、手順306において、圧力差PCと基準値S(N,N−1)が比較される。圧力差PCが基準値S(N,N−1)以上である場合には次の手順307に進み、そうでない場合は変速段移行の処理を行わずに呼び出しもとに戻る。
【0054】
手順307では、タイマで測定中の時間が基準時間T(N,N−1)と比較される。基準時間T(N,N−1)はN速→N−1速に移行するための基準時間であり、図4に示されている。図4に示された基準時間の中から現在の変速段Nに該当する基準時間を選択してタイマの時間と比較するのである。手順307でタイマの時間が基準時間T(N,N−1)以上となれば手順308に進み、そうでなければ手順305に戻る。
【0055】
すなわち、手順305〜307を繰り返すことにより、圧力差PCが基準値S(N,N−1)以上である状態が基準時間T(N,N−1)以上連続したかどうかを判定するのである。基準時間T(N,N−1)以上連続した場合には手順308において変数Nの値を1だけ減少させる。すなわち1段低速側の変速段の値を変数Nに記憶させる。そして呼び出しもとに戻る。
【0056】
圧力差PCが基準値S(N,N−1)以上である状態が基準時間T(N,N−1)以上連続しなかった場合には、手順306の判定で「No」となり、変速段移行の処理を行わずに呼び出しもとに戻る。
【0057】
以上の「低速移行」サブルーチンで、変数Nが変更されても、直ちに変速段の変更制御が行われるわけではなく、さらに図5の手順105で処理された後、手順106において変数Nに記憶されている変速段の値により、実際の変速段が設定される。
【0058】
図8は、手順105で呼び出される「変速範囲」サブルーチンの処理手順を示すフローチャートである。この「変速範囲」サブルーチンは、前述の「高速移行」サブルーチンおよび「低速移行」サブルーチンで変更された変速段の変数値が、使用可能な変速段の範囲内に収まっているかどうかを判定して、範囲外の変速段になっていた場合には範囲内の変速段に修正するためのサブルーチンである。
【0059】
「変速範囲」サブルーチンが呼び出されると、まず、手順401において、使用可能な変速段の範囲を規定する変速段の最低値と最高値とを設定する。使用可能な変速段の範囲とは、例えば、低速自動移行モードでは1〜3速の範囲であり、高速自動移行モードは4〜5速の範囲である。すなわち、低速自動移行モードでは、使用可能な変速段の最低値が1とされ最高値が3とされる。高速自動移行モードでは変速段の最低値が4とされ最高値が5とされる。そして、完全自動移行モードでは変速段の最低値が1とされ最高値が5とされる。
【0060】
また、これらの全ての自動変速モードにおいて、変速下限ラインが設定されている場合、この変速下限ラインも最低値に反映される。例えば、変速下限ラインが2−3速間に設定されている場合、最低値が3以上となるように調整される。自動変速モードの最低値が1であっても最低値が3に修正され、最低値が4であればそのままとされる。そして、さらに特定の上方位置における変速段1速制限も考慮される。1速制限が適用される場合には、最低値が2以上となるように調整される。
【0061】
次に、手順402において、移行後の変速段を示す変数Nの値が最低値よりも小さいか否かが判断される。変数Nの値が最低値よりも小さい場合は手順403に進み、そうでない場合は手順403を跳び越して手順404に進む。手順403では、変数Nに最低値が代入され、変速段が最低値を超えて下がらないように調整される。
【0062】
次に、手順404において、変数Nの値が最高値よりも大きいか否かが判断される。変数Nの値が最高値よりも大きい場合は手順405に進み、そうでない場合は手順405を跳び越して呼び出しもとに戻る。手順405では、変数Nに最高値が代入され、変速段が最高値を超えて上がらないように調整される。そして、呼び出しもとに戻る。
【0063】
以上の図5から図8に示すような処理手順によって自動変速制御を行うことにより、現在の工具の駆動トルクに相当する検出値に加えて、その検出値と基準値との関係が持続する時間をも考慮して自動変速制御を行うことができ、非常に安定した自動変速制御を実現することができる。また、工具や地盤施工機に異常な振動が発生することを防止して、安全で信頼性の高い地盤施工機を実現することができる。
【0064】
以上のように、本発明によれば、現在の工具の駆動トルクに相当する検出値に加えて、その検出値と基準値との関係が持続する時間をも考慮して自動変速制御を行うことにより非常に安定した自動変速制御を行うことが可能な地盤施工機およびその工具駆動制御方法を提供することができる。また、工具や地盤施工機に異常な振動が発生することを防止して、安全で信頼性の高い地盤施工機を提供することができる。
【産業上の利用可能性】
【0065】
本発明の地盤施工機およびその工具駆動制御方法は、現在の工具の駆動トルクに相当する検出値に加えて、その検出値と基準値との関係が持続する時間をも考慮して自動変速制御を行うことにより非常に安定した自動変速制御を提供することができる。また、工具や地盤施工機に異常な振動が発生することを防止して、安全で信頼性の高い地盤施工機を提供することができる。
【符号の説明】
【0066】
1 地盤施工機
3 軌道帯輪
4 リーダ
5 運転台
6 油圧シリンダ
7 フィードテーブル
8 回転駆動装置
9 支点
10 チューブ体
11 工具
80 駆動制御部
81,82 油圧モータ
83 電磁弁
84 電磁クラッチ
85 駆動軸
86,87 検出器
【特許請求の範囲】
【請求項1】
回転駆動により地盤に対して施工するための工具(11)と、
出力軸の駆動トルクと回転速度との関係が変更可能な油圧モータ(81,82)を複数備え、前記工具(11)を回転駆動するための駆動部(8)と、
前記油圧モータ(81,82)に供給される流体の供給側の圧力と前記油圧モータ(81,82)から排出される流体の圧力との圧力差を検出するための検出器(86,87)と、
前記駆動部(8)の駆動トルクと回転速度の関係がそれぞれ異なる複数の変速段のいずれかを自動的に選択して前記駆動部(8)を駆動制御する駆動制御部(80)とを有し、
前記駆動制御部(80)は、
前記圧力差によって前記変速段の選択を行うものであり、
前記変速段から隣接する上下の変速段に移行するための前記圧力差の基準値がそれぞれの変速段移行に対して設定されているとともに、前記変速段から隣接する上下の変速段に移行するための基準時間がそれぞれの変速段移行に対して設定されており、
前記圧力差が変速段を低速側に移行するための基準値以上である状態がその変速段移行のための基準時間以上連続した場合に、前記変速段を低速側に移行するものであり、
前記圧力差が変速段を高速側に移行するための基準値以下である状態がその変速段移行のための基準時間以上連続した場合に、前記変速段を高速側に移行するものである地盤施工機。
【請求項2】
請求項1に記載した地盤施工機であって、
前記変速段は、1速から5速の5段階に設定されたものである地盤施工機。
【請求項3】
請求項2に記載した地盤施工機であって、
前記変速段の移行は、1速から3速までの低速段の範囲で自動的に移行する低速自動移行モードと、4速から5速までの高速段の範囲で自動的に移行する高速自動移行モードと、1速から5速までの全範囲で自動的に移行する完全自動移行モードの各移行モードを選択可能なものである地盤施工機。
【請求項4】
請求項3に記載した地盤施工機であって、
前記低速自動移行モード、前記高速自動移行モードおよび前記完全自動移行モードの各モードは、各モードの開始時の変速段を指定することが可能なものである地盤施工機。
【請求項5】
請求項1〜4のいずれか1項に記載した地盤施工機であって、
前記駆動制御部(80)は、前記変速段の低速側移行を制限するために最低値を設定することが可能なものである地盤施工機。
【請求項6】
請求項1〜5のいずれか1項に記載した地盤施工機であって、
前記駆動制御部は、前記変速段を手動で指定して、それ以後その変速段を維持することが可能なものである地盤施工機。
【請求項7】
回転駆動により地盤に対して施工するための工具(11)と、
出力軸の駆動トルクと回転速度との関係が変更可能な油圧モータ(81,82)を複数備え、前記工具(11)を回転駆動するための駆動部(8)と、
前記油圧モータ(81,82)に供給される流体の供給側の圧力と排出側の圧力を検出するための検出器(86,87)と、
前記駆動部(8)の駆動トルクと回転速度の関係がそれぞれ異なる複数の変速段のいずれかを選択して前記駆動部を駆動制御する駆動制御部(80)とを有する地盤施工機における工具駆動制御方法であって、
前記油圧モータ(81,82)に供給される流体の供給側の圧力と排出側の圧力との圧力差を検出する手順と、
前記圧力差が現在の変速段を低速側に移行するための基準値以上である状態がその変速段移行のための基準時間以上連続した場合に、現在の変速段を低速側の隣接する変速段に移行する手順と、
前記圧力差が現在の変速段を高速側に移行するための基準値以下である状態がその変速段移行のための基準時間以上連続した場合に、現在の変速段を高速側の隣接する変速段に移行する手順とを有する地盤施工機の工具駆動制御方法。
【請求項1】
回転駆動により地盤に対して施工するための工具(11)と、
出力軸の駆動トルクと回転速度との関係が変更可能な油圧モータ(81,82)を複数備え、前記工具(11)を回転駆動するための駆動部(8)と、
前記油圧モータ(81,82)に供給される流体の供給側の圧力と前記油圧モータ(81,82)から排出される流体の圧力との圧力差を検出するための検出器(86,87)と、
前記駆動部(8)の駆動トルクと回転速度の関係がそれぞれ異なる複数の変速段のいずれかを自動的に選択して前記駆動部(8)を駆動制御する駆動制御部(80)とを有し、
前記駆動制御部(80)は、
前記圧力差によって前記変速段の選択を行うものであり、
前記変速段から隣接する上下の変速段に移行するための前記圧力差の基準値がそれぞれの変速段移行に対して設定されているとともに、前記変速段から隣接する上下の変速段に移行するための基準時間がそれぞれの変速段移行に対して設定されており、
前記圧力差が変速段を低速側に移行するための基準値以上である状態がその変速段移行のための基準時間以上連続した場合に、前記変速段を低速側に移行するものであり、
前記圧力差が変速段を高速側に移行するための基準値以下である状態がその変速段移行のための基準時間以上連続した場合に、前記変速段を高速側に移行するものである地盤施工機。
【請求項2】
請求項1に記載した地盤施工機であって、
前記変速段は、1速から5速の5段階に設定されたものである地盤施工機。
【請求項3】
請求項2に記載した地盤施工機であって、
前記変速段の移行は、1速から3速までの低速段の範囲で自動的に移行する低速自動移行モードと、4速から5速までの高速段の範囲で自動的に移行する高速自動移行モードと、1速から5速までの全範囲で自動的に移行する完全自動移行モードの各移行モードを選択可能なものである地盤施工機。
【請求項4】
請求項3に記載した地盤施工機であって、
前記低速自動移行モード、前記高速自動移行モードおよび前記完全自動移行モードの各モードは、各モードの開始時の変速段を指定することが可能なものである地盤施工機。
【請求項5】
請求項1〜4のいずれか1項に記載した地盤施工機であって、
前記駆動制御部(80)は、前記変速段の低速側移行を制限するために最低値を設定することが可能なものである地盤施工機。
【請求項6】
請求項1〜5のいずれか1項に記載した地盤施工機であって、
前記駆動制御部は、前記変速段を手動で指定して、それ以後その変速段を維持することが可能なものである地盤施工機。
【請求項7】
回転駆動により地盤に対して施工するための工具(11)と、
出力軸の駆動トルクと回転速度との関係が変更可能な油圧モータ(81,82)を複数備え、前記工具(11)を回転駆動するための駆動部(8)と、
前記油圧モータ(81,82)に供給される流体の供給側の圧力と排出側の圧力を検出するための検出器(86,87)と、
前記駆動部(8)の駆動トルクと回転速度の関係がそれぞれ異なる複数の変速段のいずれかを選択して前記駆動部を駆動制御する駆動制御部(80)とを有する地盤施工機における工具駆動制御方法であって、
前記油圧モータ(81,82)に供給される流体の供給側の圧力と排出側の圧力との圧力差を検出する手順と、
前記圧力差が現在の変速段を低速側に移行するための基準値以上である状態がその変速段移行のための基準時間以上連続した場合に、現在の変速段を低速側の隣接する変速段に移行する手順と、
前記圧力差が現在の変速段を高速側に移行するための基準値以下である状態がその変速段移行のための基準時間以上連続した場合に、現在の変速段を高速側の隣接する変速段に移行する手順とを有する地盤施工機の工具駆動制御方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−69140(P2011−69140A)
【公開日】平成23年4月7日(2011.4.7)
【国際特許分類】
【出願番号】特願2009−222041(P2009−222041)
【出願日】平成21年9月28日(2009.9.28)
【出願人】(390025759)株式会社ワイビーエム (26)
【Fターム(参考)】
【公開日】平成23年4月7日(2011.4.7)
【国際特許分類】
【出願日】平成21年9月28日(2009.9.28)
【出願人】(390025759)株式会社ワイビーエム (26)
【Fターム(参考)】
[ Back to top ]