
地盤評価装置および地盤評価方法
【課題】掘削機が所定の地盤に到達したか否かを判断することを可能とした地盤評価装置および地盤評価方法を提案する。
【解決手段】掘削機の作動状態に相関する音や振動の時刻暦データを取得する音響受信器2と三軸加速度計3と、これらの時刻暦データを解析するデータ解析部5と、掘削機Mが支持地盤GRに到達したことを報知する報知部6と、を備える地盤評価装置1と、この地盤評価装置を利用して掘削機Mが支持地盤GRに到達したか否かを判定する地盤評価方法。
【解決手段】掘削機の作動状態に相関する音や振動の時刻暦データを取得する音響受信器2と三軸加速度計3と、これらの時刻暦データを解析するデータ解析部5と、掘削機Mが支持地盤GRに到達したことを報知する報知部6と、を備える地盤評価装置1と、この地盤評価装置を利用して掘削機Mが支持地盤GRに到達したか否かを判定する地盤評価方法。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地盤評価装置および地盤評価方法に関する。
【背景技術】
【0002】
アースオーガ等の掘削機による支持層までの掘削は、一般的に試験ボーリング等の結果に応じて設定された設計深度まで掘削することにより行われている。
掘削機による掘削が支持層にまで到達したか否かの判断は、掘削中に行うことは困難であったため、掘削後に行う貫入試験などにより確認していた。
【0003】
ところが、掘削後に確認を行う場合、貫入試験の結果、所定の支持層に到達していないことが発覚した場合には、その補修作業に手間がかかっていた。
【0004】
そのため、掘削中の地盤を調査することを可能とした調査方法が多数開発されている。
例えば、特許文献1には、掘削機のロッドの打撃数、回転圧、削孔長等の削孔データに基いて、地盤の強度を調査する方法が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−197429号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところが、特許文献1に記載の調査方法は、地盤の強度を判断することができるものの、地盤の種類までは特定することはできなかった。
そのため、例えば、基礎工事等において、支持層の手前に当該支持層と同程度の強度を有した岩盤層が介在していると、支持層に到達したか否かの判断をするのが困難であった。
なお、上記問題は、TBMやシールドマシンが所定の地盤(例えば破砕帯等)に近づいたか否かを判断する場合においても同様にあてはまる。
【0007】
本発明は、前記問題点を解決するものであって、掘削機が所定の地盤に到達したか否かを判断することを可能とした地盤評価装置および地盤評価方法を提案することを課題とする。
【課題を解決するための手段】
【0008】
このような課題を解決する本発明の地盤評価装置は、掘削機の作動状態に相関する物理量の時刻暦データを取得するデータ取得部と、前記データ取得部で取得された時刻暦データを解析するデータ解析部と、前記掘削機が目標地盤に到達したことを報知する報知部と、を備えるものであって、前記データ解析部は、前記データ取得部で取得された時刻暦データに対してスペクトル解析を行い、周波数領域の関数である掘削時周波数スペクトルを演算するスペクトル解析手段と、前記掘削機の非掘削時に取得した非掘削時周波数スペクトルを、前記掘削時周波数スペクトルから差し引いて第一補正スペクトルを演算する第一補正手段と、前記目標地盤と同等の地盤を前記掘削機で掘削した際に取得した教師スペクトルを記憶する記憶手段と、前記教師スペクトルの積分値を前記第一補正スペクトルの積分値で除算して補正係数を演算する補正係数演算手段と、前記第一補正スペクトルに前記補正係数を乗算して第二補正スペクトルを演算する第二補正手段と、前記教師スペクトルと前記第二補正スペクトルとの相関係数を演算する相関係数演算手段と、前記相関係数が閾値を超えているか否かを判定する判定手段と、を具備しており、前記報知部は、前記相関係数が前記閾値を超えていると判定された場合に、前記掘削機が前記目標地盤に到達したことを報知することを特徴としている。
【0009】
また、本発明の地盤評価方法は、掘削機の作動状態に相関する物理量の時刻暦データを取得し、前記時刻暦データを解析して前記掘削機が目標地盤に到達したか否かを判断する地盤評価方法であって、前記時刻暦データに対してスペクトル解析を行い、周波数領域の関数である掘削時周波数スペクトルを演算するスペクトル解析ステップと、前記掘削機の非掘削時に取得した非掘削時周波数スペクトルを、前記掘削時周波数スペクトルから差し引いて第一補正スペクトルを演算する第一補正ステップと、前記目標地盤と同等の地盤を前記掘削機で掘削した際に取得した教師スペクトルの積分値を前記第一補正スペクトルの積分値で除算して補正係数を演算する補正係数演算ステップと、前記第一補正スペクトルに前記補正係数を乗算して第二補正スペクトルを演算する第二補正ステップと、前記教師スペクトルと前記第二補正スペクトルとの相関係数を演算する相関係数演算ステップと、前記相関係数が閾値を超えているか否かを判定する判定ステップと、を備えることを特徴としている。
【0010】
「掘削機の作動状態に相関する物理量」には、例えば、掘削機の周辺で観測される音(駆動源の作動音や地盤との接触に伴って発生する音など)、掘削機の振動に伴う加速度、電動モータに供給する電流や電動モータの出力(トルク)、油圧モータに供給する作動油の圧力や油圧モータの出力(トルク)、回転軸に発生するひずみ(せん断ひずみ)などが含まれる。
【0011】
かかる地盤評価装置および地盤評価方法によれば、掘削機の作動状態に相関する物理量(例えば、音、加速度、トルク、電流、圧力等)を取得することにより、掘削機が目標地盤に到達したか否かを高精度に検知することを可能としている。
【0012】
また、掘削機が目標地盤に到達した際には、報知部(例えば、モニター等の表示手段、スピーカー、表示灯など)により知らせるため、作業員の経験値や技術力に関わらず、認知することが可能である。
また、目標地盤に到達したか否かの判定は、掘削中の地盤のスペクトルと目標地盤の教師スペクトルとの相関係数により認定するため、客観的なものとなる。
【発明の効果】
【0013】
本発明の地盤評価装置および地盤評価方法によれば、掘削機が所定の地盤に到達したか否かを適切に判断することが可能となる。
【図面の簡単な説明】
【0014】
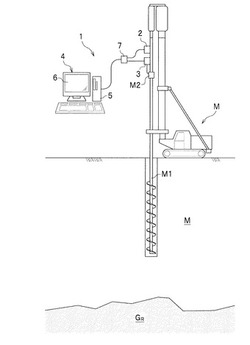
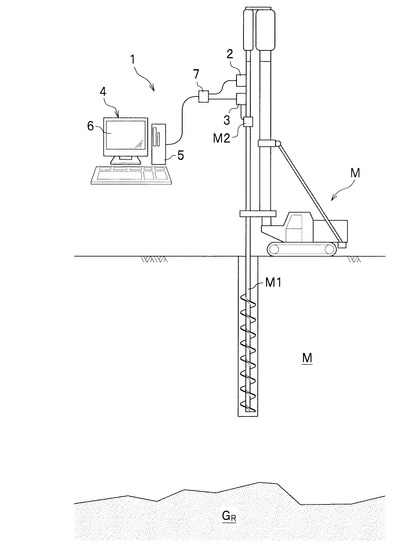
【図1】本発明の実施形態に係る地盤評価装置の設置状況を示す模式図である。
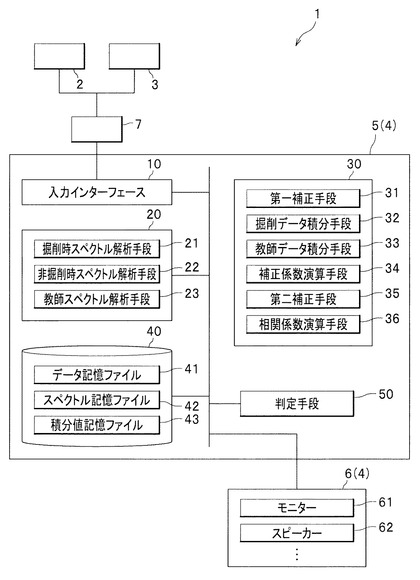
【図2】同じく地盤評価装置の構成を示すブロック図である。
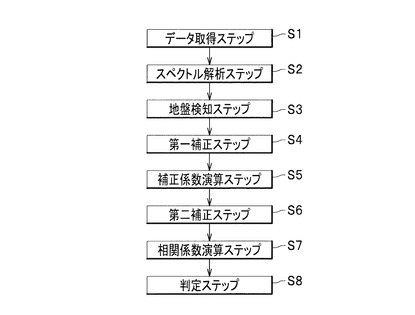
【図3】本実施形態に係る地盤評価方法を示すフローチャートである。
【図4】計測波形を示すグラフである。
【図5】(a)および(b)は、掘削時周波数スペクトルを示すグラフである。
【図6】(a)は非掘削時周波数スペクトルを示すグラフ、(b)は掘削時周波数スペクトルを示すグラフ、(c)は第一補正スペクトルを示すグラフである。
【図7】(a)第一補正スペクトルを示すグラフ、(b)は教師スペクトルを示すグラフ、(c)は第二補正スペクトルを示すグラフである。
【発明を実施するための形態】
【0015】
本発明の好適な実施の形態について、図面を参照して説明する。
本実施形態の地盤評価装置1は、図1に示すように、支持地盤(目標地盤)GRまで掘削を行うアースオーガ掘削機(以下、単に「掘削機」という)MのオーガM1が支持地盤GRまで到達したか否かを判定するものである。
【0016】
地盤評価装置1は、音響受信器(データ取得部)2と、三軸加速度計(データ取得部)3と、コンピュータ4と、を備えている。
【0017】
音響受信器2は、掘削機Mによる地盤Gの掘削に伴って発生する音(例えば、オーガM1の先端部が地盤Gに接触することにより発生する音)を受信する装置である。
三軸加速度計3は、掘削機Mによる地盤Gの掘削に伴ってロッドに発生する振動(加速度)を計測する装置である。三軸加速度計3は、鉛直方向の加速度と、水平面内において直交する二つの軸に沿う方向の加速度とを計測する。
なお、本実施形態では、データ取得部として、音響受信器2と三軸加速度計3を使用するものとしたが、オーガM1の駆動源の出力トルクを計測するトルク計測器、ロッドに発生するせん断ひずみを計測するひずみゲージなどをデータ取得部としてもよい。また、掘削機Mの駆動源が電動モータである場合には、電動モータに供給される電流を計測する電流計をデータ取得部とすることができ、駆動源が油圧モータである場合には、油圧モータに供給される作動油の油圧を計測する圧力計をデータ取得部とすることができる。また、これらの計測器は、複数の計測器を併用してもよいし、1つのみを使用してもよい。また、三軸加速度計3に代えて一軸加速度計や二軸加速度計を採用してもよい。
【0018】
本実施形態では、オーガM1の着脱作業の妨げとならないように、音響受信器2および三軸加速度計3を掘削機MのオーガM1の取付部M2よりも上方に設置するが、音響受信器2および三軸加速度計3の取付箇所は限定されるものではない。図示は省略するが、取付部M2の下側やオーガM1の先端部に音響受信器2や三軸加速度計3を取り付けても差し支えない。
【0019】
コンピュータ4は、データ解析部5と、報知部6とを備えている。データ解析部5は、音響受信器2が取得した音の時刻暦データと三軸加速度計3が取得した振動(加速度)の時刻暦データとをコンバータ(A/D変換器)7を介して入手し、解析するものである。報知部6は、データ解析部5から出力された情報を報知するものであり、本実施形態では、モニター61やスピーカー62にて構成されている(図2参照)。
【0020】
データ解析部5は、図2に示すように、入力インターフェース10と、解析手段20と、算出手段30と、記憶手段40と、判定手段50と、を備えている。
【0021】
入力インターフェース10は、音響受信器2および三軸加速度計3から送信された物理量の時刻暦データを取得する手段である。
なお、入力インターフェース10は、データ取得部から出力されるデータの形式等に応じて適宜設定されるものであって、例えば、データ取得部として電力計を備える場合には電力データ用の入力インターフェースを備えるものとする。データ解析部5に取り込まれた時刻暦データは、記憶手段40に格納される。
【0022】
解析手段20は、入力インターフェース10を介して取得した各種時刻暦データのスペクトル解析を行う手段である。本実施形態の解析手段20は、掘削時スペクトル解析手段21と、非掘削時スペクトル解析手段22と、教師スペクトル解析手段23と、を備えている。各手段の具体的な機能は、後述する。
【0023】
算出手段30は、第一補正手段31と、掘削データ積分手段32と、教師データ積分手段33と、補正係数演算手段34と、第二補正手段35と、相関係数演算手段36と、を備えている。各手段の具体的な機能は、後述する。
【0024】
記憶手段40は、書き込み可能な不揮発性の半導体メモリ(フラッシュメモリ)、ハードディスク装置、光ディスク装置などにより構成されるものであり、入力インターフェース10を介して入力されたデータを記憶するデータ記憶ファイル41と、解析手段20により解析されたデータを記憶するスペクトル記憶ファイル42と、算出手段30により算出された結果等を記憶する積分値記憶ファイル43とを備えている。
【0025】
判定手段50は、相関係数演算手段36により算出された相関係数を利用してオーガM1(掘削機)が支持地盤GRに到達したか否かを判定する手段である。
【0026】
なお、本実施形態では、図示せぬ中央演算処理装置(CPUやMPU)が解析手段20、算出手段30および判定手段50として機能する。
【0027】
次に、地盤評価装置1を利用した地盤評価方法について説明する。
本実施形態にかかる地盤評価方法は、図3に示すように、データ取得ステップS1と、スペクトル解析ステップS2と、地盤検知ステップS3と、第一補正ステップS4と、補正係数演算ステップS5と、第二補正ステップS6と、相関係数演算ステップS7と、判定ステップS8と、を備えている。
【0028】
なお、地盤評価装置1のスペクトル記憶ファイル42には、予め教師スペクトル(図7(b)参照)と非掘削時周波数スペクトル(図6(a)参照)が記憶されており、積分値記憶ファイル43には、予め教師積分値が記憶されている。
【0029】
ここで、教師スペクトルは、先行掘削の際にデータ取得部で取得した時刻暦データをスペクトル解析(FFT、MEMなど)して得た周波数スペクトル(周波数領域の関数)である。すなわち、教師スペクトルは、目標地盤(支持地盤GR)と同等の地盤(本実施形態では、支持地盤GRとする)において前もって掘削機Mによる掘削を行って、掘削機Mの作動状態に相関する物理量(本実施形態では音および加速度)の時刻暦データをデータ取得部で取得し、取得した時刻暦データを教師スペクトル解析手段23にてスペクトル解析を行うことで得ることができる。ちなみに、本実施形態の教師スペクトル解析手段23は、FFT(高速フーリエ変換)を行うが、MEM(最大エントロピー法)その他のスペクトル解析を行うように構成してもよい。
【0030】
なお、本実施形態では、試験ボーリングを行うことで支持地盤GRの深度が確認された個所または当該試験ボーリングの近傍において掘削機Mにより先行掘削を行い、オーガM1の先端部が支持地盤GRを掘削している最中に、掘削機Mの作動状態に相関する物理量の時刻暦データ(以下、「先行掘削時データ」という。)を採取している。
【0031】
また、教師積分値は、教師スペクトルを積分することで算出される(式1参照)。教師積分値の演算は、教師データ積分手段33により行われる。
【0032】
【数1】

【0033】
非掘削時周波数スペクトルは、非掘削時にデータ取得部で取得された時刻暦データをスペクトル解析することで算出されたものである。
本実施形態では、先行掘削により削孔された掘削孔内においてオーガM1を空回転(下降させずに回転)させ、その際に音響受信器2や三軸加速度計3で取得した音や振動等の物理量の時刻暦データに対して、非掘削時スペクトル解析手段22によりスペクトル解析を行うことで、周波数領域の関数である非掘削時周波数スペクトルを算出する。
【0034】
なお、本実施形態では、地中(掘削孔内)においてオーガM1を空回転させた際に取得した音や振動の時刻暦データから、非掘削時周波数スペクトルを算出する場合を例示したが、空中(掘削孔の外)でオーガM1を空回転させた際に得られる音等の時刻暦データから、非掘削時周波数スペクトルを算出してもよい。空中でオーガM1を回転させる場合、オーガM1(ロッド)は、支持地盤GRの掘削時と同程度の長さを有しているのが望ましい。
【0035】
本実施形態では、教師スペクトルおよび非掘削時周波数スペクトルを、データ解析部5により算出するものとしたが、教師スペクトルおよび非掘削時周波数スペクトルは、直接入力されたデータであってもよい。
【0036】
本掘削の際には、まず、データ取得ステップS1が実行される。データ取得ステップS1では、掘削機Mによる地盤掘削時の音や振動の時刻暦データ(掘削機Mの作動状態に相関する物理量の時刻暦データ)を取得する。
【0037】
掘削機Mによる地盤の掘削破壊に伴って放出される音は、音響受信器2が受信する。音響受信器2により受信された音の時刻暦データは、コンバータ7および入力インターフェース10を介してデータ解析部5に入力され、データ記憶ファイル41に記憶される。
【0038】
掘削機Mによる地盤掘削時にオーガM1に発生する振動は、三軸加速度計3により計測する。三軸加速度計3により計測された振動(加速度)の時刻暦データは、コンバータ7および入力インターフェース10を介してデータ解析部5に入力され、データ記憶手段41に記憶される。
【0039】
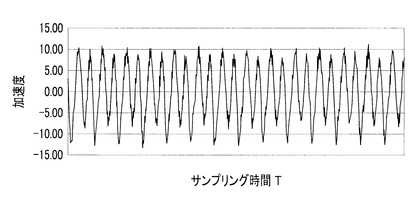
本掘削時の音や振動の時刻暦データは、図4に示すようなアナログ波形として取得されるが、コンバータ7によりデジタル波形に変換され、サンプリング間隔(サンプリング周波数の逆数)ごとの離散データとしてデータ記憶ファイル41に記憶される。ちなみに、図4のグラフの縦軸は、加速度である。なお、入力された離散データ等をモニター61に表示してもよい。
なお、本掘削時の音や振動のサンプリング時間Tは、長く取るのが望ましいが、データ処理に要する時間や記憶するデータ量を考慮して設定する。本実施形態では1回のサンプリング時間として10秒〜60秒確保するが、サンプリング時間はこれに限定されるものではない。
【0040】
スペクトル解析ステップS2では、データ記憶ファイル41に記憶された本掘削時の時刻暦データに対して、掘削時スペクトル解析手段21によりスペクトル解析を行い、周波数領域の関数である掘削時周波数スペクトルを演算する。
【0041】
掘削時スペクトル解析手段21は、データ記憶ファイル41に時刻暦データが記憶されると起動する。掘削時スペクトル解析手段21は、データ記憶ファイル41の中から音や振動等の時刻暦データ(離散化された時刻暦データ)を読み出し、読み出した時刻暦データに対してスペクトル解析(本実施形態ではFFT)を行うことで、掘削時周波数スペクトルを得る。
【0042】
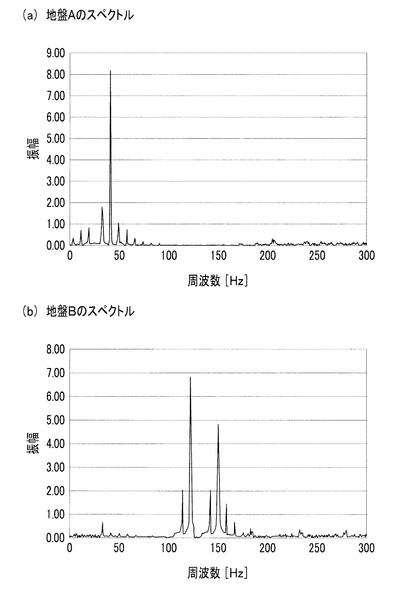
掘削時スペクトル解析手段21により得られた掘削時周波数スペクトルは、図5(a)または(b)に示すように、周波数と振幅との関係からなるグラフにより示すことができる。
【0043】
地盤差異検知ステップS3では、スペクトル解析ステップS2により算出された掘削時周波数スペクトルをモニタ61上において確認し、スペクトル記憶ファイル42に予め記憶された教師スペクトルとの差異を検知する。
ここで、掘削時周波数スペクトルが、教師スペクトルと明らかに異なると判断される場合は、第一補正ステップS4以降の作業を行わずに、掘削機Mによる掘削を続行する。
【0044】
なお、地盤差異検知ステップS3は、必要に応じて行えばよく、省略してもよい。また、掘削時周波数スペクトルと教師スペクトルとの差異の検知は、機械的に行ってもよい。
【0045】
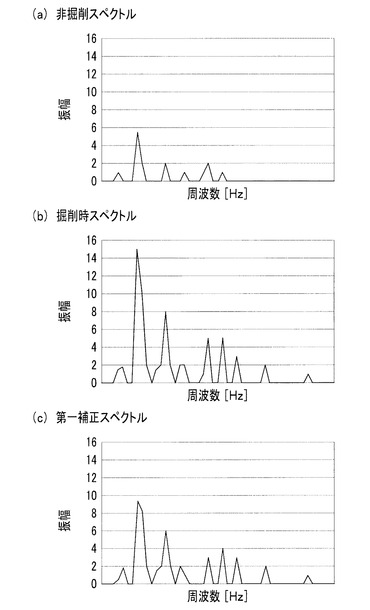
第一補正ステップS4では、第一補正手段31により、スペクトル解析ステップS2において算出された掘削時周波数スペクトルから掘削機械の特有の音・振動をキャンセルして、第一補正スペクトルを得る。
【0046】
すなわち、第一補正手段31は、スペクトル記憶ファイル42の中から掘削時周波数スペクトル(図6(b)参照)および非掘削時周波数スペクトル(図6(a)参照)を読み出し、掘削時周波数スペクトルから非掘削時周波数スペクトルを差し引いて、第一補正スペクトル(図6(c)参照)を算出する。第一補正スペクトルは、スペクトル記憶ファイル42に記憶される。
【0047】
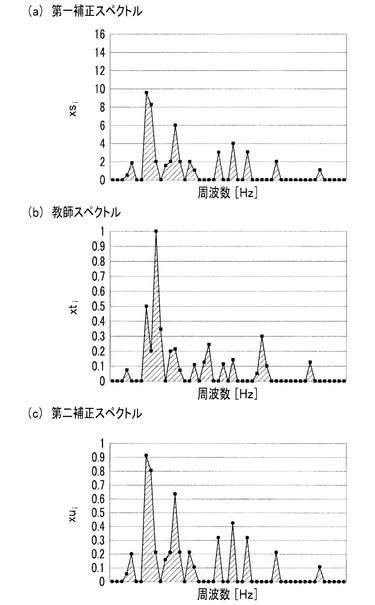
補正係数演算ステップS5では、教師積分値を第一補正スペクトルの積分値で除算して補正係数を演算する。教師積分値は、図7の(b)に示す教師スペクトルの積分値(ハッチング部分の面積)であり、積分値記憶ファイル43に予め記憶されているものを使用する。
【0048】
第一補正スペクトルの積分値は、図7の(a)のハッチング部分の「面積」であり、掘削データ積分手段32により演算される。すなわち、掘削データ積分手段32は、スペクトル記憶ファイル42の中から第一補正スペクトル(図7(a)参照)を読み出し、これを積分して積分値(以下、「第一積分値」という。)を算出する(式2参照)。第一積分値は、積分値記憶ファイル43に記憶される。
【0049】
【数2】
【0050】
補正係数は、補正係数演算手段34により演算される。すなわち、掘削データ積分手段32により第一積分値SSが算出されると、補正係数演算手段34は、積分値記憶ファイル43の中から第一積分値SSおよび教師積分値Stを読み出し、教師積分値Stを第一積分値SSで除算することにより補正係数kを算出する(式3)。算出された補正係数kは、記憶手段40に記憶される。
【0051】
【数3】
【0052】
第二補正ステップS6では、補正係数演算ステップS5において算出された補正係数kを利用して第二補正スペクトル(図7(c)参照)を演算する。
【0053】
すなわち、補正係数kの演算が終了すると、第二補正手段35が起動して第二補正スペクトルの演算が開始される。
第二補正手段35は、スペクトル記憶ファイル42の中から第一補正スペクトルを読み出し、読み出した第一補正スペクトルに補正係数kを乗算して第二補正スペクトルを演算する。なお、第二補正スペクトルの各周波数における振幅xuiは、第一補正スペクトルの各周波数における振幅xsi に補正係数kを乗じた値であり、第二補正スペクトルの積分値(図7の(c)のハッチング部分の面積)は、教師積分値(図7の(b)のハッチング部分の面積)と等しくなる。
【0054】
相関係数演算ステップS7では、教師スペクトルと第二補正スペクトルとの相関係数Rを演算する。
【0055】
相関係数Rは、相関係数演算手段36により演算される。
相関係数演算手段36は、式4に示すように、教師スペクトルと第二補正スペクトルを利用して相関係数Rを算出する。
【0056】
【数4】
【0057】
判定ステップS8では、相関係数Rが閾値R0を超えているか否かを判定する。
すなわち、判定手段50は、予め設定された閾値R0と相関係数Rとを比較し、相関係数Rが閾値R0を超えている(R>R0)場合には、掘削中の地盤が支持地盤GRであると判定し、相関係数Rが閾値R0を超えていない(R≦R0)場合には、掘削中の地盤が支持地盤GRでない(支持地盤GRに到達していない)と判定する。
なお、相関係数Rが1であれば、第二補正スペクトルと教師スペクトルとが全く同じスペクトルであることを示している。
【0058】
判定ステップS8により、掘削機M(オーガM1)が支持地盤GRに到達したと判断されると、報知部6に信号が送られ、当該信号を受けた報知部6は、オーガM1の先端が支持地盤GRへ到達したことを作業員等に報知する。本実施形態では、支持地盤GRへ到達したことを示す画像がモニター61に表示されるとともに、支持地盤GRへ到達したことを知らせる音(音声やブザー等)がスピーカー62から発せられる。
なお、データ取得ステップS1から判定ステップS8までを複数回行い、相関係数Rが閾値R0を超えている(R>R0)という判定が複数回連続し、かつ、その回数が規定回数に達した場合に、掘削中の地盤が支持地盤GRであると判定するように構成してもよい。
【0059】
以上、本実施形態の地盤評価装置1および地盤評価方法によれば、本掘削時における掘削機Mの状態が目標地盤と同等の地盤を掘削したときの状態と似通っているかを数値的に判断することができるため、作業員の個人差などによる誤差が生じることなく、一定の精度を確保することが可能となる。
【0060】
また、地盤の強度のみではなく、掘削破壊による音やロッドに伝わる振動等を利用して地盤の評価を行うため、強度のみが似通った地盤を目標地盤と認識してしまうことがなく、高精度に施工を行うことができる。
つまり、地盤の種類により変化する掘削時の音や振動を利用することで、支持地盤GRの上方に存在する他の岩盤や玉石層等を、支持地盤GRとして認識することを防止する。
【0061】
また、掘削機Mから発する音や振動を除外したスペクトル(第一補正スペクトル)を利用して判定しているため高精度である。
【0062】
以上、本発明について、好適な実施形態について説明した。しかし、本発明は、前述の各実施形態に限られず、前記の各構成要素については、本発明の趣旨を逸脱しない範囲で、適宜変更が可能であることはいうまでもない。
【0063】
例えば、前記実施形態では、オーガ掘削機による基礎掘削について、本発明の地盤評価装置および地盤評価方法を採用した場合について説明したが、本発明の地盤評価装置および地盤評価方法を適用可能な工法は限定されるものではなく、あらゆる回転式の掘削機を利用する工法に採用可能である。
例えば、TBMやシールド工法において採用することで、破砕帯の前後に存在する地盤を目標地盤として施工を行えば、破砕帯での掘削開始前に、予め破砕帯に近づいていることを把握することができるため、補助工法の準備などを先行して行うことが可能となる。
【0064】
また、データ取得部として音響受信器と三軸加速器を使用する場合について説明したが、データ取得部の数は限定されるものではなく、適宜設定すればよい。
また、データ取得部の種類も限定されるものではなく、例えば、モータの電流を測定する電流計、一軸加速度計、二軸加速度計、速度計、回転軸のせん断ひずみゲージ等を使用してもよい。
【0065】
また、ストローク計を備えることで、支持層への削孔深(根入れ深さ等)を測定する構成としてもよい。
【符号の説明】
【0066】
1 地盤評価装置
2 音響受信器(データ取得部)
3 三軸加速度計(データ取得部)
4 コンピュータ
5 データ解析部
6 報知部
10 入力インターフェース
20 解析手段
30 算出手段
40 記憶手段
50 判定手段
【技術分野】
【0001】
本発明は、地盤評価装置および地盤評価方法に関する。
【背景技術】
【0002】
アースオーガ等の掘削機による支持層までの掘削は、一般的に試験ボーリング等の結果に応じて設定された設計深度まで掘削することにより行われている。
掘削機による掘削が支持層にまで到達したか否かの判断は、掘削中に行うことは困難であったため、掘削後に行う貫入試験などにより確認していた。
【0003】
ところが、掘削後に確認を行う場合、貫入試験の結果、所定の支持層に到達していないことが発覚した場合には、その補修作業に手間がかかっていた。
【0004】
そのため、掘削中の地盤を調査することを可能とした調査方法が多数開発されている。
例えば、特許文献1には、掘削機のロッドの打撃数、回転圧、削孔長等の削孔データに基いて、地盤の強度を調査する方法が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−197429号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところが、特許文献1に記載の調査方法は、地盤の強度を判断することができるものの、地盤の種類までは特定することはできなかった。
そのため、例えば、基礎工事等において、支持層の手前に当該支持層と同程度の強度を有した岩盤層が介在していると、支持層に到達したか否かの判断をするのが困難であった。
なお、上記問題は、TBMやシールドマシンが所定の地盤(例えば破砕帯等)に近づいたか否かを判断する場合においても同様にあてはまる。
【0007】
本発明は、前記問題点を解決するものであって、掘削機が所定の地盤に到達したか否かを判断することを可能とした地盤評価装置および地盤評価方法を提案することを課題とする。
【課題を解決するための手段】
【0008】
このような課題を解決する本発明の地盤評価装置は、掘削機の作動状態に相関する物理量の時刻暦データを取得するデータ取得部と、前記データ取得部で取得された時刻暦データを解析するデータ解析部と、前記掘削機が目標地盤に到達したことを報知する報知部と、を備えるものであって、前記データ解析部は、前記データ取得部で取得された時刻暦データに対してスペクトル解析を行い、周波数領域の関数である掘削時周波数スペクトルを演算するスペクトル解析手段と、前記掘削機の非掘削時に取得した非掘削時周波数スペクトルを、前記掘削時周波数スペクトルから差し引いて第一補正スペクトルを演算する第一補正手段と、前記目標地盤と同等の地盤を前記掘削機で掘削した際に取得した教師スペクトルを記憶する記憶手段と、前記教師スペクトルの積分値を前記第一補正スペクトルの積分値で除算して補正係数を演算する補正係数演算手段と、前記第一補正スペクトルに前記補正係数を乗算して第二補正スペクトルを演算する第二補正手段と、前記教師スペクトルと前記第二補正スペクトルとの相関係数を演算する相関係数演算手段と、前記相関係数が閾値を超えているか否かを判定する判定手段と、を具備しており、前記報知部は、前記相関係数が前記閾値を超えていると判定された場合に、前記掘削機が前記目標地盤に到達したことを報知することを特徴としている。
【0009】
また、本発明の地盤評価方法は、掘削機の作動状態に相関する物理量の時刻暦データを取得し、前記時刻暦データを解析して前記掘削機が目標地盤に到達したか否かを判断する地盤評価方法であって、前記時刻暦データに対してスペクトル解析を行い、周波数領域の関数である掘削時周波数スペクトルを演算するスペクトル解析ステップと、前記掘削機の非掘削時に取得した非掘削時周波数スペクトルを、前記掘削時周波数スペクトルから差し引いて第一補正スペクトルを演算する第一補正ステップと、前記目標地盤と同等の地盤を前記掘削機で掘削した際に取得した教師スペクトルの積分値を前記第一補正スペクトルの積分値で除算して補正係数を演算する補正係数演算ステップと、前記第一補正スペクトルに前記補正係数を乗算して第二補正スペクトルを演算する第二補正ステップと、前記教師スペクトルと前記第二補正スペクトルとの相関係数を演算する相関係数演算ステップと、前記相関係数が閾値を超えているか否かを判定する判定ステップと、を備えることを特徴としている。
【0010】
「掘削機の作動状態に相関する物理量」には、例えば、掘削機の周辺で観測される音(駆動源の作動音や地盤との接触に伴って発生する音など)、掘削機の振動に伴う加速度、電動モータに供給する電流や電動モータの出力(トルク)、油圧モータに供給する作動油の圧力や油圧モータの出力(トルク)、回転軸に発生するひずみ(せん断ひずみ)などが含まれる。
【0011】
かかる地盤評価装置および地盤評価方法によれば、掘削機の作動状態に相関する物理量(例えば、音、加速度、トルク、電流、圧力等)を取得することにより、掘削機が目標地盤に到達したか否かを高精度に検知することを可能としている。
【0012】
また、掘削機が目標地盤に到達した際には、報知部(例えば、モニター等の表示手段、スピーカー、表示灯など)により知らせるため、作業員の経験値や技術力に関わらず、認知することが可能である。
また、目標地盤に到達したか否かの判定は、掘削中の地盤のスペクトルと目標地盤の教師スペクトルとの相関係数により認定するため、客観的なものとなる。
【発明の効果】
【0013】
本発明の地盤評価装置および地盤評価方法によれば、掘削機が所定の地盤に到達したか否かを適切に判断することが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態に係る地盤評価装置の設置状況を示す模式図である。
【図2】同じく地盤評価装置の構成を示すブロック図である。
【図3】本実施形態に係る地盤評価方法を示すフローチャートである。
【図4】計測波形を示すグラフである。
【図5】(a)および(b)は、掘削時周波数スペクトルを示すグラフである。
【図6】(a)は非掘削時周波数スペクトルを示すグラフ、(b)は掘削時周波数スペクトルを示すグラフ、(c)は第一補正スペクトルを示すグラフである。
【図7】(a)第一補正スペクトルを示すグラフ、(b)は教師スペクトルを示すグラフ、(c)は第二補正スペクトルを示すグラフである。
【発明を実施するための形態】
【0015】
本発明の好適な実施の形態について、図面を参照して説明する。
本実施形態の地盤評価装置1は、図1に示すように、支持地盤(目標地盤)GRまで掘削を行うアースオーガ掘削機(以下、単に「掘削機」という)MのオーガM1が支持地盤GRまで到達したか否かを判定するものである。
【0016】
地盤評価装置1は、音響受信器(データ取得部)2と、三軸加速度計(データ取得部)3と、コンピュータ4と、を備えている。
【0017】
音響受信器2は、掘削機Mによる地盤Gの掘削に伴って発生する音(例えば、オーガM1の先端部が地盤Gに接触することにより発生する音)を受信する装置である。
三軸加速度計3は、掘削機Mによる地盤Gの掘削に伴ってロッドに発生する振動(加速度)を計測する装置である。三軸加速度計3は、鉛直方向の加速度と、水平面内において直交する二つの軸に沿う方向の加速度とを計測する。
なお、本実施形態では、データ取得部として、音響受信器2と三軸加速度計3を使用するものとしたが、オーガM1の駆動源の出力トルクを計測するトルク計測器、ロッドに発生するせん断ひずみを計測するひずみゲージなどをデータ取得部としてもよい。また、掘削機Mの駆動源が電動モータである場合には、電動モータに供給される電流を計測する電流計をデータ取得部とすることができ、駆動源が油圧モータである場合には、油圧モータに供給される作動油の油圧を計測する圧力計をデータ取得部とすることができる。また、これらの計測器は、複数の計測器を併用してもよいし、1つのみを使用してもよい。また、三軸加速度計3に代えて一軸加速度計や二軸加速度計を採用してもよい。
【0018】
本実施形態では、オーガM1の着脱作業の妨げとならないように、音響受信器2および三軸加速度計3を掘削機MのオーガM1の取付部M2よりも上方に設置するが、音響受信器2および三軸加速度計3の取付箇所は限定されるものではない。図示は省略するが、取付部M2の下側やオーガM1の先端部に音響受信器2や三軸加速度計3を取り付けても差し支えない。
【0019】
コンピュータ4は、データ解析部5と、報知部6とを備えている。データ解析部5は、音響受信器2が取得した音の時刻暦データと三軸加速度計3が取得した振動(加速度)の時刻暦データとをコンバータ(A/D変換器)7を介して入手し、解析するものである。報知部6は、データ解析部5から出力された情報を報知するものであり、本実施形態では、モニター61やスピーカー62にて構成されている(図2参照)。
【0020】
データ解析部5は、図2に示すように、入力インターフェース10と、解析手段20と、算出手段30と、記憶手段40と、判定手段50と、を備えている。
【0021】
入力インターフェース10は、音響受信器2および三軸加速度計3から送信された物理量の時刻暦データを取得する手段である。
なお、入力インターフェース10は、データ取得部から出力されるデータの形式等に応じて適宜設定されるものであって、例えば、データ取得部として電力計を備える場合には電力データ用の入力インターフェースを備えるものとする。データ解析部5に取り込まれた時刻暦データは、記憶手段40に格納される。
【0022】
解析手段20は、入力インターフェース10を介して取得した各種時刻暦データのスペクトル解析を行う手段である。本実施形態の解析手段20は、掘削時スペクトル解析手段21と、非掘削時スペクトル解析手段22と、教師スペクトル解析手段23と、を備えている。各手段の具体的な機能は、後述する。
【0023】
算出手段30は、第一補正手段31と、掘削データ積分手段32と、教師データ積分手段33と、補正係数演算手段34と、第二補正手段35と、相関係数演算手段36と、を備えている。各手段の具体的な機能は、後述する。
【0024】
記憶手段40は、書き込み可能な不揮発性の半導体メモリ(フラッシュメモリ)、ハードディスク装置、光ディスク装置などにより構成されるものであり、入力インターフェース10を介して入力されたデータを記憶するデータ記憶ファイル41と、解析手段20により解析されたデータを記憶するスペクトル記憶ファイル42と、算出手段30により算出された結果等を記憶する積分値記憶ファイル43とを備えている。
【0025】
判定手段50は、相関係数演算手段36により算出された相関係数を利用してオーガM1(掘削機)が支持地盤GRに到達したか否かを判定する手段である。
【0026】
なお、本実施形態では、図示せぬ中央演算処理装置(CPUやMPU)が解析手段20、算出手段30および判定手段50として機能する。
【0027】
次に、地盤評価装置1を利用した地盤評価方法について説明する。
本実施形態にかかる地盤評価方法は、図3に示すように、データ取得ステップS1と、スペクトル解析ステップS2と、地盤検知ステップS3と、第一補正ステップS4と、補正係数演算ステップS5と、第二補正ステップS6と、相関係数演算ステップS7と、判定ステップS8と、を備えている。
【0028】
なお、地盤評価装置1のスペクトル記憶ファイル42には、予め教師スペクトル(図7(b)参照)と非掘削時周波数スペクトル(図6(a)参照)が記憶されており、積分値記憶ファイル43には、予め教師積分値が記憶されている。
【0029】
ここで、教師スペクトルは、先行掘削の際にデータ取得部で取得した時刻暦データをスペクトル解析(FFT、MEMなど)して得た周波数スペクトル(周波数領域の関数)である。すなわち、教師スペクトルは、目標地盤(支持地盤GR)と同等の地盤(本実施形態では、支持地盤GRとする)において前もって掘削機Mによる掘削を行って、掘削機Mの作動状態に相関する物理量(本実施形態では音および加速度)の時刻暦データをデータ取得部で取得し、取得した時刻暦データを教師スペクトル解析手段23にてスペクトル解析を行うことで得ることができる。ちなみに、本実施形態の教師スペクトル解析手段23は、FFT(高速フーリエ変換)を行うが、MEM(最大エントロピー法)その他のスペクトル解析を行うように構成してもよい。
【0030】
なお、本実施形態では、試験ボーリングを行うことで支持地盤GRの深度が確認された個所または当該試験ボーリングの近傍において掘削機Mにより先行掘削を行い、オーガM1の先端部が支持地盤GRを掘削している最中に、掘削機Mの作動状態に相関する物理量の時刻暦データ(以下、「先行掘削時データ」という。)を採取している。
【0031】
また、教師積分値は、教師スペクトルを積分することで算出される(式1参照)。教師積分値の演算は、教師データ積分手段33により行われる。
【0032】
【数1】
【0033】
非掘削時周波数スペクトルは、非掘削時にデータ取得部で取得された時刻暦データをスペクトル解析することで算出されたものである。
本実施形態では、先行掘削により削孔された掘削孔内においてオーガM1を空回転(下降させずに回転)させ、その際に音響受信器2や三軸加速度計3で取得した音や振動等の物理量の時刻暦データに対して、非掘削時スペクトル解析手段22によりスペクトル解析を行うことで、周波数領域の関数である非掘削時周波数スペクトルを算出する。
【0034】
なお、本実施形態では、地中(掘削孔内)においてオーガM1を空回転させた際に取得した音や振動の時刻暦データから、非掘削時周波数スペクトルを算出する場合を例示したが、空中(掘削孔の外)でオーガM1を空回転させた際に得られる音等の時刻暦データから、非掘削時周波数スペクトルを算出してもよい。空中でオーガM1を回転させる場合、オーガM1(ロッド)は、支持地盤GRの掘削時と同程度の長さを有しているのが望ましい。
【0035】
本実施形態では、教師スペクトルおよび非掘削時周波数スペクトルを、データ解析部5により算出するものとしたが、教師スペクトルおよび非掘削時周波数スペクトルは、直接入力されたデータであってもよい。
【0036】
本掘削の際には、まず、データ取得ステップS1が実行される。データ取得ステップS1では、掘削機Mによる地盤掘削時の音や振動の時刻暦データ(掘削機Mの作動状態に相関する物理量の時刻暦データ)を取得する。
【0037】
掘削機Mによる地盤の掘削破壊に伴って放出される音は、音響受信器2が受信する。音響受信器2により受信された音の時刻暦データは、コンバータ7および入力インターフェース10を介してデータ解析部5に入力され、データ記憶ファイル41に記憶される。
【0038】
掘削機Mによる地盤掘削時にオーガM1に発生する振動は、三軸加速度計3により計測する。三軸加速度計3により計測された振動(加速度)の時刻暦データは、コンバータ7および入力インターフェース10を介してデータ解析部5に入力され、データ記憶手段41に記憶される。
【0039】
本掘削時の音や振動の時刻暦データは、図4に示すようなアナログ波形として取得されるが、コンバータ7によりデジタル波形に変換され、サンプリング間隔(サンプリング周波数の逆数)ごとの離散データとしてデータ記憶ファイル41に記憶される。ちなみに、図4のグラフの縦軸は、加速度である。なお、入力された離散データ等をモニター61に表示してもよい。
なお、本掘削時の音や振動のサンプリング時間Tは、長く取るのが望ましいが、データ処理に要する時間や記憶するデータ量を考慮して設定する。本実施形態では1回のサンプリング時間として10秒〜60秒確保するが、サンプリング時間はこれに限定されるものではない。
【0040】
スペクトル解析ステップS2では、データ記憶ファイル41に記憶された本掘削時の時刻暦データに対して、掘削時スペクトル解析手段21によりスペクトル解析を行い、周波数領域の関数である掘削時周波数スペクトルを演算する。
【0041】
掘削時スペクトル解析手段21は、データ記憶ファイル41に時刻暦データが記憶されると起動する。掘削時スペクトル解析手段21は、データ記憶ファイル41の中から音や振動等の時刻暦データ(離散化された時刻暦データ)を読み出し、読み出した時刻暦データに対してスペクトル解析(本実施形態ではFFT)を行うことで、掘削時周波数スペクトルを得る。
【0042】
掘削時スペクトル解析手段21により得られた掘削時周波数スペクトルは、図5(a)または(b)に示すように、周波数と振幅との関係からなるグラフにより示すことができる。
【0043】
地盤差異検知ステップS3では、スペクトル解析ステップS2により算出された掘削時周波数スペクトルをモニタ61上において確認し、スペクトル記憶ファイル42に予め記憶された教師スペクトルとの差異を検知する。
ここで、掘削時周波数スペクトルが、教師スペクトルと明らかに異なると判断される場合は、第一補正ステップS4以降の作業を行わずに、掘削機Mによる掘削を続行する。
【0044】
なお、地盤差異検知ステップS3は、必要に応じて行えばよく、省略してもよい。また、掘削時周波数スペクトルと教師スペクトルとの差異の検知は、機械的に行ってもよい。
【0045】
第一補正ステップS4では、第一補正手段31により、スペクトル解析ステップS2において算出された掘削時周波数スペクトルから掘削機械の特有の音・振動をキャンセルして、第一補正スペクトルを得る。
【0046】
すなわち、第一補正手段31は、スペクトル記憶ファイル42の中から掘削時周波数スペクトル(図6(b)参照)および非掘削時周波数スペクトル(図6(a)参照)を読み出し、掘削時周波数スペクトルから非掘削時周波数スペクトルを差し引いて、第一補正スペクトル(図6(c)参照)を算出する。第一補正スペクトルは、スペクトル記憶ファイル42に記憶される。
【0047】
補正係数演算ステップS5では、教師積分値を第一補正スペクトルの積分値で除算して補正係数を演算する。教師積分値は、図7の(b)に示す教師スペクトルの積分値(ハッチング部分の面積)であり、積分値記憶ファイル43に予め記憶されているものを使用する。
【0048】
第一補正スペクトルの積分値は、図7の(a)のハッチング部分の「面積」であり、掘削データ積分手段32により演算される。すなわち、掘削データ積分手段32は、スペクトル記憶ファイル42の中から第一補正スペクトル(図7(a)参照)を読み出し、これを積分して積分値(以下、「第一積分値」という。)を算出する(式2参照)。第一積分値は、積分値記憶ファイル43に記憶される。
【0049】
【数2】
【0050】
補正係数は、補正係数演算手段34により演算される。すなわち、掘削データ積分手段32により第一積分値SSが算出されると、補正係数演算手段34は、積分値記憶ファイル43の中から第一積分値SSおよび教師積分値Stを読み出し、教師積分値Stを第一積分値SSで除算することにより補正係数kを算出する(式3)。算出された補正係数kは、記憶手段40に記憶される。
【0051】
【数3】
【0052】
第二補正ステップS6では、補正係数演算ステップS5において算出された補正係数kを利用して第二補正スペクトル(図7(c)参照)を演算する。
【0053】
すなわち、補正係数kの演算が終了すると、第二補正手段35が起動して第二補正スペクトルの演算が開始される。
第二補正手段35は、スペクトル記憶ファイル42の中から第一補正スペクトルを読み出し、読み出した第一補正スペクトルに補正係数kを乗算して第二補正スペクトルを演算する。なお、第二補正スペクトルの各周波数における振幅xuiは、第一補正スペクトルの各周波数における振幅xsi に補正係数kを乗じた値であり、第二補正スペクトルの積分値(図7の(c)のハッチング部分の面積)は、教師積分値(図7の(b)のハッチング部分の面積)と等しくなる。
【0054】
相関係数演算ステップS7では、教師スペクトルと第二補正スペクトルとの相関係数Rを演算する。
【0055】
相関係数Rは、相関係数演算手段36により演算される。
相関係数演算手段36は、式4に示すように、教師スペクトルと第二補正スペクトルを利用して相関係数Rを算出する。
【0056】
【数4】
【0057】
判定ステップS8では、相関係数Rが閾値R0を超えているか否かを判定する。
すなわち、判定手段50は、予め設定された閾値R0と相関係数Rとを比較し、相関係数Rが閾値R0を超えている(R>R0)場合には、掘削中の地盤が支持地盤GRであると判定し、相関係数Rが閾値R0を超えていない(R≦R0)場合には、掘削中の地盤が支持地盤GRでない(支持地盤GRに到達していない)と判定する。
なお、相関係数Rが1であれば、第二補正スペクトルと教師スペクトルとが全く同じスペクトルであることを示している。
【0058】
判定ステップS8により、掘削機M(オーガM1)が支持地盤GRに到達したと判断されると、報知部6に信号が送られ、当該信号を受けた報知部6は、オーガM1の先端が支持地盤GRへ到達したことを作業員等に報知する。本実施形態では、支持地盤GRへ到達したことを示す画像がモニター61に表示されるとともに、支持地盤GRへ到達したことを知らせる音(音声やブザー等)がスピーカー62から発せられる。
なお、データ取得ステップS1から判定ステップS8までを複数回行い、相関係数Rが閾値R0を超えている(R>R0)という判定が複数回連続し、かつ、その回数が規定回数に達した場合に、掘削中の地盤が支持地盤GRであると判定するように構成してもよい。
【0059】
以上、本実施形態の地盤評価装置1および地盤評価方法によれば、本掘削時における掘削機Mの状態が目標地盤と同等の地盤を掘削したときの状態と似通っているかを数値的に判断することができるため、作業員の個人差などによる誤差が生じることなく、一定の精度を確保することが可能となる。
【0060】
また、地盤の強度のみではなく、掘削破壊による音やロッドに伝わる振動等を利用して地盤の評価を行うため、強度のみが似通った地盤を目標地盤と認識してしまうことがなく、高精度に施工を行うことができる。
つまり、地盤の種類により変化する掘削時の音や振動を利用することで、支持地盤GRの上方に存在する他の岩盤や玉石層等を、支持地盤GRとして認識することを防止する。
【0061】
また、掘削機Mから発する音や振動を除外したスペクトル(第一補正スペクトル)を利用して判定しているため高精度である。
【0062】
以上、本発明について、好適な実施形態について説明した。しかし、本発明は、前述の各実施形態に限られず、前記の各構成要素については、本発明の趣旨を逸脱しない範囲で、適宜変更が可能であることはいうまでもない。
【0063】
例えば、前記実施形態では、オーガ掘削機による基礎掘削について、本発明の地盤評価装置および地盤評価方法を採用した場合について説明したが、本発明の地盤評価装置および地盤評価方法を適用可能な工法は限定されるものではなく、あらゆる回転式の掘削機を利用する工法に採用可能である。
例えば、TBMやシールド工法において採用することで、破砕帯の前後に存在する地盤を目標地盤として施工を行えば、破砕帯での掘削開始前に、予め破砕帯に近づいていることを把握することができるため、補助工法の準備などを先行して行うことが可能となる。
【0064】
また、データ取得部として音響受信器と三軸加速器を使用する場合について説明したが、データ取得部の数は限定されるものではなく、適宜設定すればよい。
また、データ取得部の種類も限定されるものではなく、例えば、モータの電流を測定する電流計、一軸加速度計、二軸加速度計、速度計、回転軸のせん断ひずみゲージ等を使用してもよい。
【0065】
また、ストローク計を備えることで、支持層への削孔深(根入れ深さ等)を測定する構成としてもよい。
【符号の説明】
【0066】
1 地盤評価装置
2 音響受信器(データ取得部)
3 三軸加速度計(データ取得部)
4 コンピュータ
5 データ解析部
6 報知部
10 入力インターフェース
20 解析手段
30 算出手段
40 記憶手段
50 判定手段
【特許請求の範囲】
【請求項1】
掘削機の作動状態に相関する物理量の時刻暦データを取得するデータ取得部と、
前記データ取得部で取得された時刻暦データを解析するデータ解析部と、
前記掘削機が目標地盤に到達したことを報知する報知部と、を備える地盤評価装置であって、
前記データ解析部は、
前記データ取得部で取得された時刻暦データに対してスペクトル解析を行い、周波数領域の関数である掘削時周波数スペクトルを演算するスペクトル解析手段と、
前記掘削機の非掘削時に取得した非掘削時周波数スペクトルを、前記掘削時周波数スペクトルから差し引いて第一補正スペクトルを演算する第一補正手段と、
前記目標地盤と同等の地盤を前記掘削機で掘削した際に取得した教師スペクトルを記憶する記憶手段と、
前記教師スペクトルの積分値を前記第一補正スペクトルの積分値で除算して補正係数を演算する補正係数演算手段と、
前記第一補正スペクトルに前記補正係数を乗算して第二補正スペクトルを演算する第二補正手段と、
前記教師スペクトルと前記第二補正スペクトルとの相関係数を演算する相関係数演算手段と、
前記相関係数が閾値を超えているか否かを判定する判定手段と、を具備し、
前記報知部は、前記相関係数が前記閾値を超えていると判定された場合に、前記掘削機が前記目標地盤に到達したことを報知する、ことを特徴とする地盤評価装置。
【請求項2】
掘削機の作動状態に相関する物理量の時刻暦データを取得し、
前記時刻暦データを解析して前記掘削機が目標地盤に到達したか否かを判断する地盤評価方法であって、
前記時刻暦データに対してスペクトル解析を行い、周波数領域の関数である掘削時周波数スペクトルを演算するスペクトル解析ステップと、
前記掘削機の非掘削時に取得した非掘削時周波数スペクトルを、前記掘削時周波数スペクトルから差し引いて第一補正スペクトルを演算する第一補正ステップと、
前記目標地盤と同等の地盤を前記掘削機で掘削した際に取得した教師スペクトルの積分値を前記第一補正スペクトルの積分値で除算して補正係数を演算する補正係数演算ステップと、
前記第一補正スペクトルに前記補正係数を乗算して第二補正スペクトルを演算する第二補正ステップと、
前記教師スペクトルと前記第二補正スペクトルとの相関係数を演算する相関係数演算ステップと、
前記相関係数が閾値を超えているか否かを判定する判定ステップと、を備えることを特徴とする地盤評価方法。
【請求項1】
掘削機の作動状態に相関する物理量の時刻暦データを取得するデータ取得部と、
前記データ取得部で取得された時刻暦データを解析するデータ解析部と、
前記掘削機が目標地盤に到達したことを報知する報知部と、を備える地盤評価装置であって、
前記データ解析部は、
前記データ取得部で取得された時刻暦データに対してスペクトル解析を行い、周波数領域の関数である掘削時周波数スペクトルを演算するスペクトル解析手段と、
前記掘削機の非掘削時に取得した非掘削時周波数スペクトルを、前記掘削時周波数スペクトルから差し引いて第一補正スペクトルを演算する第一補正手段と、
前記目標地盤と同等の地盤を前記掘削機で掘削した際に取得した教師スペクトルを記憶する記憶手段と、
前記教師スペクトルの積分値を前記第一補正スペクトルの積分値で除算して補正係数を演算する補正係数演算手段と、
前記第一補正スペクトルに前記補正係数を乗算して第二補正スペクトルを演算する第二補正手段と、
前記教師スペクトルと前記第二補正スペクトルとの相関係数を演算する相関係数演算手段と、
前記相関係数が閾値を超えているか否かを判定する判定手段と、を具備し、
前記報知部は、前記相関係数が前記閾値を超えていると判定された場合に、前記掘削機が前記目標地盤に到達したことを報知する、ことを特徴とする地盤評価装置。
【請求項2】
掘削機の作動状態に相関する物理量の時刻暦データを取得し、
前記時刻暦データを解析して前記掘削機が目標地盤に到達したか否かを判断する地盤評価方法であって、
前記時刻暦データに対してスペクトル解析を行い、周波数領域の関数である掘削時周波数スペクトルを演算するスペクトル解析ステップと、
前記掘削機の非掘削時に取得した非掘削時周波数スペクトルを、前記掘削時周波数スペクトルから差し引いて第一補正スペクトルを演算する第一補正ステップと、
前記目標地盤と同等の地盤を前記掘削機で掘削した際に取得した教師スペクトルの積分値を前記第一補正スペクトルの積分値で除算して補正係数を演算する補正係数演算ステップと、
前記第一補正スペクトルに前記補正係数を乗算して第二補正スペクトルを演算する第二補正ステップと、
前記教師スペクトルと前記第二補正スペクトルとの相関係数を演算する相関係数演算ステップと、
前記相関係数が閾値を超えているか否かを判定する判定ステップと、を備えることを特徴とする地盤評価方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−38257(P2011−38257A)
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願番号】特願2009−183968(P2009−183968)
【出願日】平成21年8月7日(2009.8.7)
【出願人】(000206211)大成建設株式会社 (1,602)
【Fターム(参考)】
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願日】平成21年8月7日(2009.8.7)
【出願人】(000206211)大成建設株式会社 (1,602)
【Fターム(参考)】
[ Back to top ]