
地雷探索装置、地雷探索方法
【課題】安全かつ、速やかに地雷を探知・除去するための地雷検出装置を提供する。
【解決手段】空中を飛行する飛行手段と、現在の位置を検出する位置検出手段と、予定される飛行経路に関する情報を記録する第1の記録手段と、前記検出された位置及び飛行経路に関する情報から飛行方向を補正する信号を生成する生成手段と、前記生成された信号に基づいて飛行を制御する制御手段と、飛行中に地雷を探索する探索手段と、探索結果を探索した位置と対応付けて記録する第2の記録手段と、を有する。予め自動航行により飛行した範囲内での地雷の探索結果が探索位置と対応付けられて記録されることにより、作業者は後日地雷が検出された場所のみに赴き地雷除去作業を完了させることで、安全が確認された領域を素早く現地住民に開放することができる。
【解決手段】空中を飛行する飛行手段と、現在の位置を検出する位置検出手段と、予定される飛行経路に関する情報を記録する第1の記録手段と、前記検出された位置及び飛行経路に関する情報から飛行方向を補正する信号を生成する生成手段と、前記生成された信号に基づいて飛行を制御する制御手段と、飛行中に地雷を探索する探索手段と、探索結果を探索した位置と対応付けて記録する第2の記録手段と、を有する。予め自動航行により飛行した範囲内での地雷の探索結果が探索位置と対応付けられて記録されることにより、作業者は後日地雷が検出された場所のみに赴き地雷除去作業を完了させることで、安全が確認された領域を素早く現地住民に開放することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地雷の探索、地雷の検出を行うための地雷探索装置及び探索方法に関する。
【背景技術】
【0002】
世界の紛争地帯では、その安価な製造費と効果の大きさから未だ多くの対人地雷が使用され、多くの命が失われている。近年地雷根絶を目的としたオタワ条約に批准する国が増加しているものの国境問題を抱える世界の主要大国が批准しておらず、実際には紛争地帯へ地雷が供給されているため地雷根絶には程遠い現状がある。そして、紛争が終結した後に残される無数の地雷が一般市民の安全を脅かし、国の復興の足枷になるという重い現実が圧し掛かっている。
【0003】
このような対人地雷の除去方法としては、地雷を破壊する方法と、地雷を解除する方法がある。地雷の威力は非常に強大であるため、地雷を破壊するにはその衝撃に耐えうる特殊重機を用いて地雷を破壊することにより、地雷を安全かつ効率よく除去することが出来る。しかしながら、特殊重機は高価であり、採算の関係上量産することが難しく、また使用可能な地形が限られるため、現実の復興支援において使用は限定されている。
【0004】
そこで、現実においては、人間が地雷検出装置と共に歩きながら地雷を発見し、地雷解除を行うという方法が地雷除去の現場では主流である。このような地雷検出装置として特許文献1に記載の地雷探査装置がある。当該装置の構成によれば、アームとレーダーユニットとが回動機構を介して固着されているため、地面が傾斜していても地面と一定距離を確保することで高い精度で地雷検出を行うことができる技術が開示されている。
【特許文献1】特開2006−250451号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記文献に開示されている装置を用いる場合は、作業者が当該装置を抱えながら歩いて地雷を検出する。検出ミスは作業者自身の死に直結するため、作業者はゆっくりした歩調で確実に検出作業を行うため、地雷の除去効率が非常に悪く、国土に散乱して埋められた地雷を除去し終わるまでに途方もない時間を必要とし、それまでに現地人が地雷と接触してしまう事故が数多く起きている。
【0006】
また、上記装置は、地面と装置のレーダーユニット部分との間に空隙を保つように作業を行う必要があるため作業者の疲労が大きく、また、地雷と装置との接触事故により作業者が被害にあう可能性も否定できない。
【0007】
本願発明は上記従来の課題を鑑み、安全かつ、速やかに地雷を探知・除去するための地雷検出装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本願発明の地雷探索装置は、空中を飛行する飛行手段と、現在の位置を検出する位置検出手段と、予定される飛行経路に関する情報を記録する第1の記録手段と、前記検出された位置及び飛行経路に関する情報から飛行方向を補正する信号を生成する生成手段と、前記生成された信号に基づいて飛行を制御する制御手段と、飛行中に地雷を探索する探索手段と、探索結果を探索した位置と対応付けて記録する第2の記録手段と、を具備する。
【発明の効果】
【0009】
本願発明によれば、地雷探索機能を備えた無人飛行装置が自動航行により地雷の検出作業を行えるため、作業者の地雷探索作業時の危険が無く、効率よく地雷の検出を行うことが出来る。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。
【0011】
(実施の形態1)
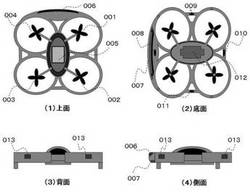
図1は、本願第1の実施の形態に係わる地雷検出装置の概観4面図であり、本装置を上面(1)、底面(2)、前面(3)、側面(4)からそれぞれ観察した図を示している。
【0012】
本発明の装置は、本体中央から突き出した4本のシャフトに取り付けられた4つのプロペラ001〜004の回転により本体は飛行・ホバーリングする。4つのプロペラは同一平面内に取り付けられ、それぞれ独立の電気モーターの駆動により独立に回転することにより安定して空中停止及び飛行を行うことが出来る。各電気モーターの回転数は飛行制御部の制御により行われる。プロペラは障害物等との接触を避けるため、内部が中空になった円柱状のフレーム内に備え付けられている。本装置は障害物が比較的多い低空を地面を這う様に飛行するため、プロペラが障害物との接触により破損する可能性が高いためである。そのため、図1に示すように本体中央に円柱状の外枠フレームがサイドガードの役割を果たす形で取り付けられることでプロペラが保護されている。
【0013】
装置本体中央には、本体ユニット005が備え付けられる。本体ユニットは、後述する装置の現在位置を検出する位置検出部、装置の飛行状態を制御する飛行制御部、予定飛行航路を予め記録しておく第1の記録部、飛行位置毎の反射波の受信状況を記録する第2の記録部、飛行位置毎の反射波の受信状況又は地雷の有無に関する情報を外部に出力する出力部等から構成される。
【0014】
前方障害物検出部006は、超音波を送信する送信部と反射波を検出する検出センサー部とから構成される。送信した超音波の反射波の受信強度や遅延プロファイルなどから飛行方向の障害物を検出する。検出センサー部で検出される反射波の上記受信状況は後述する飛行制御部に出力される。
【0015】
レーダーユニット007は、地面に埋蔵された地雷の検出を行う。具体的には電磁波を発生させて地面方向に向けて送信する送信部と反射波を検出・受信する検出センサー部から構成される。送信部から地面に向けて送信された電磁波は地面から反射されて検出センサー部で検出される。反射波は地面に埋蔵された金属物や地面の構造により異なる強度や波形として検出センサー部で検出され、検出された反射波の受信状況などから地雷が検出される。検出される反射波の受信状況は後述する地雷情報生成部に出力される。
【0016】
地面距離検出部008〜011は装置と地面との距離を検出する。具体的には超音波を発生させて地面方向に送信する送信部と反射波を検出する検出センサー部から構成される。送信部から地面に向けて送信された超音波は地面から反射されて検出センサー部で検出される。検出された反射波の受信強度や受信タイミング等に基づいて地面までの距離を求め、当該地面までの距離に関する情報を後述する飛行制御部に出力される。地面までの距離に関する情報は、必要に応じて地雷情報生成部102にも出力される。
【0017】
装置の周辺4箇所に取り付けられた周囲障害物検出部013は、周囲の障害物を検出する。具体的には前方障害物検出部と同様、超音波を送信する送信部と反射波を検出する検出センサー部から構成される。送信部から周囲に向けて送信された超音波は障害物で反射されて検出センサー部で検出される。送信部から送信した超音波のタイミングと検出された反射波の受信タイミングとの時間差などから障害物までの距離を、反射波の受信分布などから障害物の大きさを求め、後述する飛行制御部に出力される。
【0018】
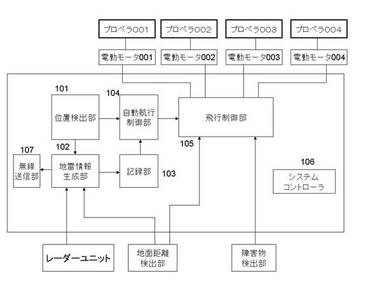
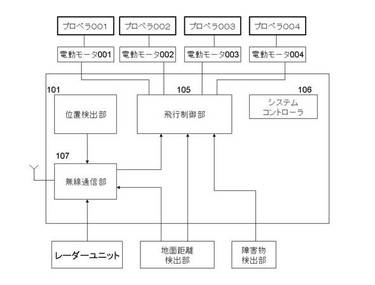
次に本体ユニット005の具体的構成について説明する。図2は本発明における本体ユニットのブロック図である。
【0019】
位置検出部101は、装置の現在位置を検出する。位置検出部101は、主にGPSアンテナ、GPSユニットで構成され、GPSユニットは、複数の衛星から送信された衛星固有のC/Aコード信号をGPSアンテナを介して受信し、各衛星から受信した信号のタイミングを基に各衛星までの擬似距離を算出して現在の位置および時刻を求める。求められた現在位置に関する位置情報は、地雷情報生成部102及び自動航行制御部104に出力される。なお、現在位置は、GPSを用いて求められる現在位置と、別途備えた現在の速度を検出する速度計、現在の移動方向を検出する方向検出計、現在の加速度を検出する加速度検出計により得られる速度情報・方位情報・加速度情報とを用いて現在位置を算出し、位置情報を地雷情報生成部102と自動航行制御部103へ出力しても良い。この構成により、GPSを用いて得られる位置情報のタイミング毎よりも細かいタイミング毎で現在位置を示す位置情報を取得することが出来る。
【0020】
地雷情報生成部102は、位置検出部101から入力した位置情報とレーダーユニットより入力した反射波の受信状況と地面距離検出部から入力した受信状況から地雷情報を生成する。図3は地雷情報の一例を示す。レーダーユニットから入力される反射波の受信強度を所定のサンプリングタイミング毎に位置検出部から入力される位置情報と関連付けて記録する。また、地雷情報生成部102は、レーダーユニットからの反射波の受信強度に、地面距離検出部で検出された本装置と地面までの距離に対する補正を行い、補正後の受信強度の値から地雷の有無の可能性をA、B、Cの3段階で判定し地雷の有無を判定する。例えば、検出番号000123のサンプリングタイミングにおいてレーダーユニットにより得られた反射波の受信強度は16.0dBであり、位置検出部101から入力された位置情報に基づいてそのサンプリングタイミングにおける装置の位置をしめす北緯34”12’5262”、東経132”36’1002”の情報が反射波強度と対応付けて記録されている。反射波の受信強度に対して、地面距離検出部から入力された装置から地面までの距離に対する補正を行った後、当該補正後の受信強度が所定の値より大きいかの判定を行い、地雷の有無を判定し、判定結果が判定結果の取得位置と対応付けられて記録されている。検出番号000123のサンプリングタイミングにおいては、補正後の受信強度が所定値を下回っていたため地雷はないとしてA判定が対応付けられて記録されている。なお、レーダーユニットからの反射波の受信強度は、地面距離検出部からの地面距離に基づいて行われる補正後の受信強度を位置と対応付けられて記録される構成であっても良い。また、地雷有無の判定は5段階評価で判定しても良い。このように本装置が飛行中の各位置において地雷の有無のデータが位置と対応付けられた管理ファイルとして地雷情報が生成されていく。生成される地雷情報は記録部103に出力されて記録・更新されていく。また、地雷情報は無線送信部107にも出力され、必要に応じて無線送信部107より外部へ送信される。
【0021】
記録部103は、地雷情報生成部102から出力される地雷情報を記録する。また記録部103は、装置の飛行予定航路情報を記録する。図4は、使用者より入力された飛行予定航路情報の一例である。予定する飛行位置の順番を示す飛行番号と飛行位置が管理テーブル状に記録されている。また、既にその位置を通過したかどうかも合わせて記録されている。各飛行番号に対応付けられた”飛行済み”が0の場合は、まだその位置を飛行しておらずその位置における地雷探索が終わっていないことを示し、”飛行済み”が1の場合は、既にその位置における地雷探索が終わっていることを示す。当該飛行予定航路情報は、本装置の使用者が予め所定のソフトウェアを用いて作成し、本装置の記録部に記録される。
【0022】
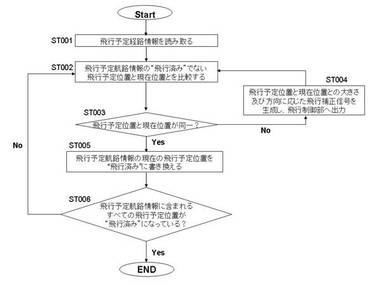
自動航行制御部104は、位置検出部101から入力される位置情報と記録部103から入力される飛行予定航路情報に基づいて飛行を制御する飛行補正信号を生成し、後述する飛行制御部105に出力する。具体的には、自動航行制御部104は記録部103から入力した飛行予定航路情報に示される“飛行済み”が0である飛行番号の位置を読み取る。図4の飛行予定航路情報において、既に飛行番号00006までは“飛行済み”が1になっており、当該飛行番号に対応付けられた位置を既に通過していることを示すため、自動航行制御部は、“飛行済み”が0である飛行番号00007に対応付けられた位置を読み取る。次に読み取った位置と位置検出部101から入力された現在位置との対比を行い、飛行補正信号を生成して飛行制御部105へ出力する。
【0023】
次に自動航行制御部104の処理シーケンスを図5を用いて説明する。自動航行制御部は、記録部に記録されている飛行予定経路情報を読み込む。次に位置検出部101から現在の位置を示す位置情報を入力する。位置情報に示す現在の位置と図4に示す飛行予定航路情報のリストの最初に示されている飛行番号に対応した位置とを比較する。例えば、位置情報が示す現在位置が北緯34度12分52秒12、東経132度36分10秒20であり、飛行予定経路における最初の位置が、北緯34度12分52秒25、東経132度36分10秒12である場合、現在位置は飛行予定位置よりも緯度で0.08秒、経度で0.13秒のずれがある。自動航行制御部104はこの位置のずれを補正するために、上記位置の差分の大きさ及び方向に応じた飛行補正信号を生成し、飛行制御部105に出力する。飛行制御部105では、入力される飛行補正信号に基づいて飛行が制御されることにより、飛行予定経路に従った飛行が行われる。自動航行制御部104は、位置検出部101より現在位置を示す位置情報を入力するタイミング毎に位置情報に示される現在の位置と、飛行予定航路情報に示される現在の飛行予定位置との比較及び飛行補正信号の生成・出力を行う。自動航行制御部104は、位置情報が示す現在位置と飛行予定位置が同一になった時、飛行予定経路情報の当該飛行予定位置の“飛行済み”の欄を0から1に書き換え、飛行予定経路に含まれるこの飛行予定位置は既に飛行済みとして、次の飛行番号に示される位置を読み取り、この位置を新たな飛行予定位置として現在位置とを比較し、上記と同様に飛行補正信号を生成して飛行制御部105へ出力する。飛行予定航路情報に示される位置すべてに関して飛行済みになった場合は、使用者により予め指定された範囲における地雷探索は完了したとして、地雷探索を終了し、予め記録されている初期位置が示す飛行場や格納倉庫へ帰還する。または飛行予定航路情報の最後の飛行番号に対応する飛行予定位置として帰還位置である飛行場の位置を記録して本装置を帰還させても良い。
【0024】
上記のように本発明の地雷探索装置では、自動航行機能を備え、予め複数の位置から構成される飛行経路を装置に読み込ませておく。そして実際に飛行経路に従って飛行する間に地面方向に向かって地雷検出用の電波を発信し続け、地面からの反射波を受信する。受信された反射波は、飛行位置と対応付けられて記録される。当該構成により、予め定めた範囲の中で地雷が発見された場所と地雷が発見されなかった場所を記録する。
【0025】
飛行制御部105は、独自の飛行制御プログラムを実行し、自動航行制御部104から出力される飛行補正信号、障害物検出部から得られる障害物情報、地面距離検出部より得られる地面までの距離に関する情報に基づいて、各プロペラを駆動させる電気モーターの回転数及びプロペラの角度を制御することで装置の飛行を制御する。
【0026】
具体的には、地面距離検出部から得られる情報により、地面までの距離が所定の距離よりも離れている場合は、4つのプロペラの回転数を上げることにより、装置を上昇させて地面までの距離を適切な所定距離へと誘導することで装置が地面へ接触することを防ぐ。逆に地面までの距離が所定の距離以上である場合は、レーダーユニットにおける地雷の検出精度が下がるため、4つのプロペラの回転数を下げることで地面までの距離を適切な距離に調節する。
【0027】
また、自動航行制御部104より入力される飛行補正信号は、現在位置と飛行予定位置との差分の方向及び大きさに応じたベクトル情報であり、飛行制御部105は、当該差分の方向及び大きさに応じて4つの電気モーターの回転数を制御することで、現在位置を飛行予定経路に乗せる制御を行う。
【0028】
また、障害物検出部により、進行方向に障害物を検出した場合は、飛行制御部105に記録された障害物回避プログラムに従って障害物を回避する。飛行制御部105は、障害物回避プログラムが作動する場合、所定のアルゴリズムに従い飛行高度を上げる、飛行経路から一度外れるなどの第1の回避行動を行うための所定の飛行制御を行う。また、第1の回避行動で回避できない場合は、自動航行制御部104に対して、現在の飛行予定位置を所定数スキップした飛行番号の飛行予定位置をターゲットとして現在位置との比較及び飛行補正信号の生成を指令する。すなわち、進行方向の前面に備え付けられている前方障害物検出部によって障害物が検出された場合は、飛行予定航路情報に示される現在の飛行予定位置ではなく、現在の飛行予定位置よりも後続の飛行予定位置を新たな現在の飛行予定位置と設定し、この新たに設定された現在の飛行予定位置と位置検出部101から出力される位置情報に示される現在の位置とを比較することで飛行補正信号を生成し、飛行制御部に出力する。このように障害物回避プログラムより第2の回避行動を行うための指令が出されることで予め時系列状に飛行予定位置が記録されている飛行予定航路情報の現在の飛行予定位置を変更することで障害物が回避できる。また第2の回避行動を行うための指令により、自動航行制御部において現在の飛行予定位置よりも後続の飛行予定位置を新たな現在の飛行予定位置と設定されて回避行動が行われても、障害物を回避できない場合は、さらに後続の飛行予定位置を新たな現在の飛行予定位置と再設定する第3の回避行動を行う指令が出され、この指令に従ってより障害物を大回りに回避する行動をとることにより、障害物を適切に回避できる。
【0029】
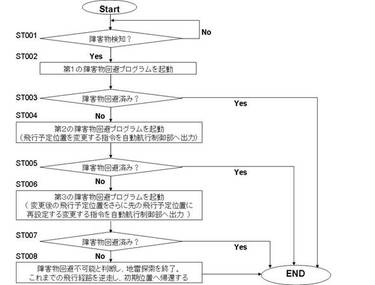
図6は、上記障害物回避プログラムを用いた障害物回避のための処理シーケンスを示した図である。
【0030】
障害物検出部により、進行方向に障害物を検出した場合(ステップ1)は、飛行制御部に記録されたプログラムが作動し、飛行制御部は、第1の障害物回避行動を行う(ステップ2)。第1の障害物回避行動は、飛行高度を上下する制御を行う、又は現在の飛行予定位置に対して、通常の飛行ルート(最短経路となるように飛行する)ではなく、所定のアルゴリズムに基づいた複数の回避飛行ルートを作成・選択し、現在の飛行予定位置への移動を試みる。この第1の障害物回避行動は、例えば進行経路に岩や段差などの障害物がある場合に、有効にそれを回避することができる。
【0031】
上記回避行動プログラムに従って回避行動を行い、回避行動後においても障害部検出部によって現在位置と現在の飛行予定位置との間に障害物が検出された場合、飛行制御部は第2の障害物回避行動を行う。第2の障害物回避行動では、例えばその飛行予定位置に樹木が生えている、建物が建っているなど、物理的にその位置に辿り着けないと判断し、その飛行予定位置を通過することを中止し、飛行予定経路を構成する時系列状に配置された複数の飛行予定位置のうち、現在の飛行予定位置の次に予定されている飛行予定位置を新たな現在の飛行予定位置と再設定する指示信号を自動航行制御部104へ出力する。自動航行制御部104において、当該指示信号に基づいて上記飛行予定位置の再設定が行われ、当該新たな飛行予定位置と現在位置との差分の大きさ及び方向に応じた飛行補正信号が生成され、飛行制御部へ入力されることで、障害物の回避が可能となる。なお、この時飛行制御部105は、飛行補正信号に基づいて電気モーターの回転数を制御するが、この第2の障害物回避行動と合わせて第1の障害物回避行動を組み合わせてもよい。例えば、飛行高度を変化させる、所定の回避アルゴリズムに基づいて飛行補正信号が示す飛行方向と直角方向に所定距離・所定時間飛行した後、新たに自動航行制御部104から出力された飛行補正信号に基づいて現在の飛行予定位置を目指して飛行する。
【0032】
上記第2の障害物回避行動を行っても、障害物が回避できずに予定飛行位置へ到達できない場合、飛行制御部は第3の回避行動プログラムを作動させる。自動航行制御部104で再設定された新たな飛行予定位置への航路で障害物が検出された場合は、再度飛行予定位置を変更させる。飛行制御部105は、自動航行制御部104に再度飛行予定位置を変更させる指示信号を出力する。自動航行制御部は、上記指示信号を入力すると、第2の障害物回避行動において再設定した飛行予定位置よりもさらに先の飛行予定位置を現在の飛行予定位置に再設定し、位置検出部より入力する現在位置と、再設定された新たな飛行予定位置との差分を飛行補正信号として生成し、飛行制御部105へ出力する。飛行制御部では新たに設定された飛行予定位置に対する自動航行に従って入力された飛行補正信号に基づいて飛行制御を行うことにより、障害物を適切に回避しつつ自動で地雷検出を行うことが可能となる。
【0033】
なお、第3の障害物回避行動を行っても障害物を回避できない場合は、飛行制御部105は、袋小路に迷い込んだと判断して、帰還用プログラムである第4のプログラムを実行させる。飛行制御部105において帰還用プログラムが作動されると、飛行制御部105は自動航行制御部104に帰還指示信号を出力する。自動航行制御部104は、飛行制御部から帰還指示信号を受信すると、記録部に記録されている初期位置から現在位置までのこれまでの飛行経路を読み込み、これまでの飛行経路を時系列を遡って逆走することで初期位置まで戻るように自動航行が行われる。このように構成することで、本装置がデッドロックに陥った場合でも適切に帰還させることが出来る。なお、所定の位置までの帰還方法は飛行経路を逆走する方法に限るものではなく、帰還用プログラムを実行し、自動航行制御部は帰還指示信号に基づいて予め設定されている帰還用の位置である所定の位置を飛行予定位置と再設定し、当該飛行予定位置と現在位置に基づいて飛行補正信号を生成して飛行制御部へ出力する。飛行制御部では飛行補正信号に基づいて飛行方向を決定すると共に、高度を地雷探索モードで設定される地面付近の低い高度から帰還モードで設定される障害物の少ない高い高度に設定し、障害物のない上空を飛行して所定位置まで帰還する。位置検出部より出力される現在位置と設定された所定の位置が同一になった場合、自動航行制御部は所定位置に到達したと判断して、着陸信号を生成して飛行制御部に出力する。飛行制御部は自動航行制御部より着陸信号を入力する所定の速度で高度を下げて着陸する。
【0034】
本発明の地雷検出装置では、地面に埋蔵・設置された地雷の検出を目的としており、地面との距離が離れるほどレーダーユニットにより受信される反射波のS/N比が劣化する。従って、例えば地面距離検出部で検出される地面から本装置までの距離が20cm〜1m程度を保つよう低く飛行することが望ましい。しかしながら、このような低空飛行を行う場合には、上空高く飛行する場合とは異なり、地面の起伏や樹木、岩、電信柱、建物、車、人間、動物など、様々な障害物か飛行経路に立ちふさがる可能性がある。このような障害物と遭遇し、障害物検出部において障害物が飛行経路内に検出された場合に、回避プログラムを作動させ、本装置が適切な回避行動を自動的にとることができるよう構成することで、外部からの操作をすることなく、地雷探索活動を継続することが出来る。
【0035】
ここで、上記第2、第3の障害物回避行動において、飛行制御部から自動航行制御部へ出力される指示信号は、障害物検出部により検出される障害物の状況に基づいて異なる指示信号が出力されても良い。飛行制御部は、例えば、障害物検出部により受信される反射波の受信強度や受信分布などに基づいて、対応する指示信号を自動航行制御部に出力する。自動航行制御部は、対応する指示信号に応じて適切な飛行予定位置を再設定するよう構成しても良い。例えば、飛行制御部は、障害物回避行動において高度の変更、飛行経路の変更など第一の回避行動が行われている間に障害物検出部によって検出される反射波の受信強度及び受信分布等に基づいて対応する指示信号を自動航行制御部へ出力し、自動航行制御部において指示信号の内容に応じて新たな飛行予定位置を再設定してもよい。例えば、障害物検出部において得られた反射波の受信分布が広い場合は、飛行制御部において第2の回避プログラムにより、障害物が大きいとして受信分布の広さに対応した指示信号が生成されて自動航行制御部に出力される。自動航行制御部では、飛行航路情報に示される現在の飛行予定位置として設定されている位置に対応する飛行番号から指示信号で指定された数だけスキップした飛行番号に対応する位置を新たな飛行予定位置として設定し、当該新たな飛行予定位置と現在位置との方向及び大きさの差分に対応した飛行補正信号を生成して飛行制御部に出力することで障害物を適切に回避できるよう構成しても良い。
【0036】
なお、上記説明では第3の障害物回避行動において所定の飛行番号分スキップした飛行番号と対応付けられた位置を飛行予定位置を再設定する方法を説明したがこれに限らず、例えば所定のアルゴリズムに基づいて現在の飛行予定位置の方向と所定の角度以上異なる方向の位置を飛行予定航路情報に含まれる複数の位置から選択し、新たな飛行予定位置として設定してよいし、飛行予定航路情報において時系列状に並べられた飛行済みでない飛行番号を所定のアルゴリズムに従って時系列を再配置して新たな飛行予定航路情報として組み換え、組み換えた飛行予定航路情報に従って現在の新たな飛行予定位置を設定してもよい。
【0037】
なお、上記説明では飛行予定航路情報に含まれる複数の位置に関して、飛行することで地雷探索が行われた位置について「飛行済み」と書き換えることにより、通過した位置と通過していない位置とが分けられる構成を説明したが、例えばその位置を飛行することで地雷検出が終わった位置について飛行予定航路情報から削除していく構成としてもよい。このように構成することで飛行が終わった位置に関する情報は、飛行予定航路情報から随時削除されていくため、飛行予定航路情報に含まれる最上位の飛行番号に対応する位置が現在の飛行予定位置となる。また、第2、第3の障害物回避プログラムが実行されることにより、飛行予定航路情報に含まれる複数の位置であって、スキップされた位置については、再度その位置について本装置が地雷探索を試みないように、飛行予定航路情報に含まれる“飛行済み”の欄を飛行済みでないことを示す“0”からスキップされた位置であることを示す“2”に書き換える処理を行っても良い。また、この位置について飛行済みとして書き換えても良いし、当該スキップされた位置と対応する飛行番号について飛行予定航路情報から削除する処理を行っても良い。
【0038】
上記の地雷探索作業により地雷検索装置で生成された地雷情報は、メモリーカードなど着脱式の記録媒体や、本装置に備え付けられた入力端子から、又、無線送信部より無線送信されるなどの手法により外部へ出力される。出力された地雷情報は、地雷除去作業の作業者が作業中に携帯するポータブル端末で読み込まれる。
【0039】
次に、上記説明した地雷探索により得られるデータについて説明する。図7は、上記地雷探索によって得られた地雷情報を所定プログラムを用いて2次元状で表示した図である。地雷除去作業を行う作業者はポータブル端末を備え当該地雷情報を2次元状で表示させる。以下当該ポータブル端末で実行されるプログラムについて説明する。
【0040】
当該プログラムはポータブル端末に記録された地雷情報に基づいて図7に示す地図を表示する。地雷情報には位置と地雷の有無が対応付けられて記録されており、この情報を読み込んでポータブル端末の画面上に表示させる。
【0041】
なお、ポータブル端末は現在の位置を検出するGPS機能を備えており、当該プログラムはGPS機能により検出された現在の位置を読み込んで、当該位置に対応する画面上の場所に自分の位置を示すアイコンをオーバーレイ表示する。
【0042】
図7において灰色の四角の領域は、予め使用者から指定された飛行予定航路情報に従って本地雷探索装置において地雷探索が行われた範囲を示す。ここで、201は作業者の現在位置を示すアイコンである。202,203は地雷を表すアイコンであり、この位置に地雷が埋まっていることを示している。204〜206は、図3に示す地雷情報において地雷の可能性があることを示すB判定であった位置について注意を促すアイコンが表示されている。例えば地面に空き缶などが転がっていた場合は、地雷探索において空き缶の位置について地雷の可能性ありとしてB判定として地雷情報が記録されるからである。207,208,209は上記説明した障害物回避行動により、飛行予定経路に含まれる範囲内であったが地雷探索が行われなかった位置を示している。
【0043】
作業者はポータブル端末の画面を確認しながら、地雷情報においてA判定とされた地雷の位置、B判定とされた地雷の可能性のある位置、地雷探索エリア内であって地雷探索が行われなかった位置について手動で地雷の有無の確認作業を行い、必要に応じて地雷除去作業を行う。
【0044】
なお、ポータブル端末において、GPSにより検出された現在位置と地雷情報に記録されたA判定、B判定とされた位置又は地雷探索が行われなかった位置までの距離が一定距離以内に入ったときは、ポータブル端末に備え付けられたスピーカーから警告音を発するように構成されることが望ましい。作業者は、画面を確認しながら地雷除去作業を行うが、画面に表示された地雷を見落とした場合に作業者が危険にさらされる。そこで、作業者が地雷の可能性がある場所に近づいた場合は、警告音発声機能や装置を振動させるバイブレーション機能に基づいて作業者に地雷の位置を再確認させる機能を有する構成とすることで、より安全に地雷除去が可能となる。なお、A判定、B判定、探索が行われなかった位置毎に警告音の大きさや種類を変えて警告できることが望ましい。
【0045】
また、当該ポータブル端末の表示画面にタッチパネル機能を備え、地雷除去又は確認作業が終了した位置の地雷アイコン等を触れることで当該位置について地雷除去・確認作業が終了したことを示すフラグアイコンを立てることができるよう構成しても良い。そのように構成することで、作業者が地雷探索範囲内でどの位置について既に確認済みであるかが一目瞭然となるため、勘違いにより同じ場所を何度も掘り返すといった2度手間を防ぐことが出来る。
【0046】
以上に説明したように、本発明の地雷探索装置は、電気モーターやプロペラなどから構成される飛行手段と、地雷を検出する地雷検出手段と、GPSのように現在位置を検出する位置検出手段と、飛行する航路に関する飛行予定航路情報を記録する第1の記録手段と、検出された現在位置と記録されている飛行予定航路情報とに基づいて飛行を制御する飛行制御ユニットと、地雷検出結果を検出位置と対応付けて記録する第2の記録手段とを有する。このように自動で地雷を検出させることで地雷除去作業者の作業量を大幅に減らすことができる。
【0047】
地雷は1つでも残せば市民の安全な生活を脅かしてしまう性質を有する兵器であるため、ある領域を安全エリアとして確立するためには、作業者はたった一つであっても地雷を見つけるために広大なエリアの探索をしなければならなかった。すなわち、地雷の検出作業というものは、地雷のない広大なエリアも念のために確認作業を行う必要があるものであり、そのことが地雷除去のスピードを遅らせる原因となっていた。このためには、地雷を検出するだけでは安全エリアの確立はできない。地雷がある場所と安全である場所を明確に区分けする必要がある。換言すれば「ここに地雷がある」という情報のみでは目的を達成できず、「ここは安全である」という情報を取得し、広大なエリアの中から安全ではない場所を抽出し、その抽出された限定領域について地雷確認作業・地雷除去作業を行うことにより、そのエリア全体について初めて安全宣言を出すことができるのである。
【0048】
上記点に着目し、本願発明では探索を行った範囲と地雷の有無の両方を記録する。図7に示すように、探索の結果、安全な場所はクリアされるため、作業者は地雷が検出された場所や、地雷の可能性がある場所、障害物があって本装置が通過できなかった場所に限定して赴き、地雷除去・地雷確認作業を行えばそのエリアの地雷除去作業は終了する。すなわち、本装置を用いることにより、人的に地雷除去作業を行う必要がある領域を大幅に限定させることが出来るため、地雷除去作業効率が飛躍的に向上するため、戦後復興処理において速やかに地雷を除去し、農地の開拓や居住エリアの確保を行えるため戦争で疲弊した国を早急に立て直すことができる。
【0049】
なお、上記説明では、飛行予定位置と現在位置とが同一の場合に、その飛行予定位置は通過済みとして次の飛行予定位置へ飛行する構成について説明したが、これに限るものではなく、例えば現在の位置情報に示される現在位置と過去の位置情報に示される現在位置とを直線補間して得られる位置が飛行予定位置とほぼ同一又は所定の誤差の範囲内である場合は、既にその飛行予定位置は飛行済みとして処理しても良い。現在位置を示す位置情報は、位置検出部101から所定のタイミング毎に出力されるため、飛行予定位置に示す場所を通過している場合もあるからである。例えば、現在の位置情報に示される現在位置が北緯34度12分52秒12、東経132度36分10秒20であり、1つ前の位置情報に示されていた現在位置が、北緯34度12分52秒12、東経132度36分10秒04であった場合、この2点を線形補完して得られる北緯34度12分52秒12、東経132度36分10秒04〜20の位置は既に飛行済みであるとして、この位置範囲に現在の飛行予定位置が含まれているかを比較する。例えば飛行予定位置が北緯34度12分52秒12、東経132度36分10秒14であった場合は、既にこの飛行予定位置は本装置が通過済みであり、この位置においてレーダーユニットの受信部において反射波が受信されているため、この位置の地雷探索は行われているものとして、この飛行予定位置は飛行済みに書き換えて次の飛行予定位置と現在位置の比較へ移る。このように処理することで、高速度で飛行しながらでも適切に自動航行が可能となる。
【0050】
また、障害物検出部は電磁波を定期的に送信する送信部と反射波を受信する受信部と、受信した反射波の受信強度や空間分布などを解析して障害物の検出処理を行う処理部とから構成されてもよい。飛行制御部は、当該障害物検出部で検出された障害物までの距離及び障害物の大きさに基づいて対応する指示信号を生成し、自動航行制御部へ出力する。自動航行制御部では、入力した指示信号に基づいて飛行予定航路情報の中から適切な位置を現在の飛行予定位置に設定する。例えば検出された障害物が大きい場合、新たな飛行予定位置として現在の飛行予定位置の次の飛行予定位置に変更しても、障害物を回避しきれないことも多い。そこで、大きい障害物に対応する指示信号を飛行制御部から入力した場合は、現在の飛行予定位置から大きさに応じた所定のステップ分先の飛行予定位置を新たな飛行予定位置に再設定して自動航行を行っても良い。障害物の大きさに応じて現在の飛行予定位置よりも大きくかけ離れた場所が飛行予定位置に設定されることで障害物を大きな回避ルートを通って適切に回避できる。その他、障害物検出部を光学カメラで構成し、光学的に取得された画像から障害物を判定・検出するよう構成しても良い。
【0051】
なお、本装置においてバッテリー残量を検出する検出部を新たに有し、バッテリーの残量が予め設定された所定の残量よりも少なくなった場合に、地雷探索を強制終了し、初期位置又は使用者から無線指示された所定の位置へ帰還する制御を行うよう構成しても良い。本装置が自動航行する場合に、障害物の回避による飛行距離の延長などが原因で当初の予定よりも本装置のバッテリーの消費が激しく、地雷探索を終了する前にバッテリー切れで墜落してしまうことが想定され、本装置の破損や行方不明に繋がってしまう。そこで、本装置において、予め地雷探索を中断するバッテリー残量の値を設定する設定部と、バッテリー残量を検出するバッテリー残量検出部と、この設定されたバッテリー残量の値と検出された現在のバッテリー残量の比較を行う比較部を有し、現在のバッテリー残量が設定されたバッテリー残量を下回った場合に、当該比較部は、バッテリー残量を下回ったことを示す信号を自動航行制御部に出力し、自動航行制御部は、入力した上記信号に基づいて、飛行予定航路情報に基づく地雷探索用の航行モードから、これまでの飛行経路を記録した飛行経路情報に基づく帰還用の帰還モードに変更され、予め指定された帰還用位置を飛行予定位置と設定することにより帰還用の位置又は初期位置へ帰還するよう構成されていても良い。自動航行制御部では、位置検出部より入力される現在位置と帰還用の位置または初期位置との差分の大きさおよび方向に基づく飛行補正信号が飛行制御部へ入力されることにより、最終的に所定の位置へ帰還できる。
【0052】
なお、上記説明では、比較部は予め設定されたバッテリー残量の値と現在のバッテリー残量の値とを比較する構成を説明したがこれに限るものではなく、位置検出部より入力される現在位置と予め設定された所定の帰還位置までの距離に応じて帰還モードに変更するバッテリー残量の値を求め、当該求められた値と検出部で検出されるバッテリー残量の値とを比較するよう構成しても良い。バッテリー残量が少なくなっていても現在の飛行位置が帰還位置と近ければ帰還可能であるため、地雷探索作業を続けて継続することが可能となる。
【0053】
なお、本装置が地雷探索作業中に岩などの障害物との接触による破損、樹木と絡まるなどのアクシデントにより身動きが取れなくなる場合が想定される。この場合、本装置の使用者は、装置を回収するために、飛行予定航路情報で指定した範囲内を探し回らなければならない。そこで、自動航行制御部は、飛行補正信号を飛行制御部に一定期間出力しても、位置検出部で検出される現在位置が所定の移動量以上移動しない場合は、スタックしていると判断し、飛行制御部に回避信号を出力する。飛行制御部は、自動航行制御部から、回避信号を受信すると、現在装置が陥っているトラブルを回避するための回避プログラムを起動させる。当該回避プログラムを起動すると、周囲に取り付けられた障害物検出部により検出される障害物の距離が最も大きい方向に移動を試みる、その場で高速回転を行う、高度を急上昇させる等の所定の飛行制御を行い、現状の打開試みる。当該回避プログラムに従ってトラブルの回避を試みた後、自動航行制御部は飛行補正信号を一定期間飛行制御部に出力しても位置検出部から入力される現在位置がほぼ同一である場合は、自力でのトラブル回避は不可能と判断し、緊急信号を生成してシステムコントローラ106に出力する。システムコントローラ106は緊急信号を入力すると、位置検出部101に現在位置を示す位置情報を無線送信部へ出力させる指示を、地雷情報生成部102にこれまでに生成した地雷情報を無線送信部へ出力させる指示をそれぞれ行う。無線送信部は入力したこれらの情報を無線送信する。このように構成することで、本装置がスタックして身動きが取れなくなっても、本装置の位置を示す情報及びそれまでの地雷情報が使用者へ送信されるため、使用者は受信した本装置の場所を示す位置情報に基づいて装置の回収を速やかに行うことが出来る。システムコントローラ106は、その他装置全体の制御も行う。
【0054】
なお、飛行経路に関する情報は記録部103に記録される構成を示したが、SDカードやフラッシュメモリーのようなメモリーカードに記録される構成であっても良い。本体ユニット005は、メモリーカードを挿入するメモリーカードスロットを有し、自動航行制御部は、当該メモリーカードスロットに挿入されたメモリーカードに記録された飛行予定航路情報に基づいて経路補正を行う構成であっても良い。
【0055】
なお、飛行予定航路情報を記録する記録部と地雷情報を記録する記録部は同一であってもよいし、異なる2つの記録部を用意して別々に記録しても良い。また、本装置にはメモリーカードスロットを1つ保有し、メモリーカードに飛行予定航路情報を記録して本体に装着し、自動航行制御部が当該メモリーカードから飛行予定航路情報を読み取り、地雷情報生成部は、生成した地雷情報を当該装着されているメモリーカードに記録するよう構成しても良い。
【0056】
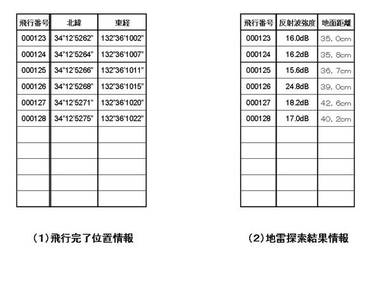
なお、上記説明では地雷情報は、図3に示すように地雷探索位置と当該位置における地雷探索結果が対応付けられて地雷情報として記録される構成を示したが、これに限るものではない。例えば図8にしめすように、地雷情報生成部は飛行予定航路情報に基づく自動航行により、実際に飛行し、地雷探索を行った位置について飛行完了位置情報として1つのファイルを作成し、レーダーユニットから入力される飛行中の地雷探索結果に関しては、地雷探索結果情報として1つのファイルを作成し、個別に管理する構成であっても良い。これら2つのファイルにおいて、地雷探索位置と当該位置での地雷探索結果が対応付けられて記録されることにより、地雷情報として1つのファイルに纏める場合と同様の結果を得ることが出来る。なお、図8の場合では、飛行完了位置情報の中で地雷探索位置が固有に割り当てられた番号と対応付けられており、地雷探索結果情報の中で当該番号と地雷探索結果が対応付けられて記録されていることにより、地雷探索位置と地雷探索結果が対応付けられて記録される。
【0057】
また、図9に示すように実際に飛行し、地雷探索を行った位置について飛行完了位置情報として1つのファイルを作成し、地雷の有無を示す1のファイルを作成しても良い。地雷の有無を示すファイルは、レーダーユニットから入力する反射波の受信強度に地面距離検出部で検出された地面までの距離に基づく補正を行い補正後の受信強度と所定の値とを対比して地雷の有無を判定し、判定結果を飛行番号と対応付けて記録している。当該飛行番号は、飛行完了位置情報において地雷探索位置と対応付けられているため、当該2つのファイルを作成することで、安全エリアと危険エリアとを知ることが出来る。これら2つのファイルを合わせて地雷情報として記録する。
【0058】
地雷の発見のみを目的とする場合は、地雷がある場所のみを記録すればよいことになるが、安全な領域を確保するという観点に立てば、地雷の場所を記録するというだけでは目的を達成できない。すなわち、どのエリアは地雷がない安全地帯であり、どのエリアは地雷が埋蔵されているかの両方を記録する必要がある。そこで本発明では、地雷探索を行ったエリアについて、反射波の受信強度等の受信状況を地雷検出結果として位置と対応付けて記録する。また、必要に応じて、上記受信状況を解析し、解析の結果、上記検出作業において地雷が検出されなかった位置は、地雷が埋蔵されていないとして安全エリアであることを意味するA判定を、地雷が検出された位置は、地雷が埋蔵されているとして危険エリアであることを意味するC判定を、地雷がある可能性がある位置は、注意エリアとして注意エリアであることを意味するB判定を、それぞれ位置と共に記録する。このように地雷が検出された場所と検出されなかった場所の両方に関して、地雷探索位置と対応付けて記録することで、どのエリアが危険であるということのみならず、どのエリアは安全であるかというデータを取得することができるため、危険エリアの地雷を除去すれば、自動航行により地雷探索が行われた範囲に関して安全であることを保証でき、現地民に素早く土地を開放することが出来る。
【0059】
(実施の形態2)
本実施の形態の地雷探索装置では、リアルタイムで地雷の検出を行うことを可能としたものである。
【0060】
世界を見渡すと未だ多くの国で紛争状態が続いている。紛争地帯ではPKOが治安維持に当たっているが、反政府勢力は現在の勢力分布のまま紛争が終結することを望まないことも多々有り、PKOの車両を狙って地雷を仕掛ける事件が散見される。地雷は短時間で設置が可能であるため、テロリストが予め車両が通過するという情報を獲得し、通過に合わせて地雷を設置する場合には、これを防ぐ手立ては限られてくる。本実施の形態の地雷探索装置ではこのような地雷に対して適切に除去することを目的としている。
【0061】
図10は本発明の地雷探索装置の使用方法を示した図である。走行する車両1001の進行方向前方に地雷探索装置1002と1003が飛行している。車両が通過する前に車両通過予定位置に対して地雷探索を行い、地雷が発見された場合は車両に地雷の存在を通知する。
【0062】
図11は本発明の地雷探索装置のブロック図である。なお、図1と同一のブロックに関しては一部説明を省略する。
【0063】
地雷探索装置は、新たに無線通信部208を有する。無線通信部内の受信部では、アンテナを介して受信された信号に対してダウンコンバート、A/D等の受信処理を行い、処理後の信号を復調部へ出力する。復調部は入力した信号に対して復調処理を行い、処理後の信号を復号化部へ出力する。復号化部では、入力した信号に対して復号化処理を行い処理後の信号がバッファ部へ出力される。バッファ部に出力される信号は、主に車両の位置を表す車両位置情報、車両の速度を表す車両速度情報、車両から送信される飛行操作情報、他の地雷探索装置から送信される飛行情報などが含まれる。バッファ部で一時保存されたこれらの情報はシステムコントローラ106の制御に従って、復号化された信号を適切なブロックへ出力する。
【0064】
自動航行制御部104は、位置検出部から入力した現在位置及び図示せぬ一時記録部に記録された飛行予定航路情報に基づいて自動航行を行う。飛行予定経路情報は予め使用者から無線入力された車両が走行する経路すなわち本装置の飛行経路に関する情報である。また自動航行制御部は無線通信部より、車両の位置情報及び車両速度情報を入力し、これらの情報に基づいて飛行予定経路情報の中から現在飛行すべき位置を求め、現在位置との差分の大きさ及び方向から飛行補正信号を生成して飛行制御部105に出力する。
【0065】
図12は上記飛行予定航路情報を示している。時系列状に並べられた飛行番号毎に飛行予定位置が対応付けられて管理テーブルとして記録されている。管理テーブルに示された「●」は、現在の車両の位置を表し、無線通信部より入力された車両位置情報から特定される。自動航行制御部は、車両位置情報に示す現在の車両位置と最も近い位置を示す飛行番号の位置を車両が走行していると判断する。この場合では車両位置情報に示される位置が、飛行番号005に対応する北緯34”12’5266”、東経132”36’1011”の場所に最も近かったため、車両は飛行番号005に対応する位置を通過していると判断する。本装置は車両に先立って飛行し、地雷探索を行う必要があるため、車両のいる飛行番号005の位置から3ステップ先の飛行番号008を現在の飛行予定位置と設定し、当該飛行予定位置と現在位置との差分から飛行補正信号を生成して飛行制御部に出力する。なお、テーブルには飛行予定位置に対応する飛行番号に本装置の飛行予定位置を示す「◎」が表示されている。
【0066】
なお、上記説明では車両の走行位置に最も近い位置の飛行番号から3ステップ先の飛行番号の位置を飛行予定位置として設定したが、何ステップ先を飛行予定位置とするかは、無線通信部より入力される車両速度情報に基づいて決定されても良い。例えば、車両が高速度で走行している場合、車両位置と地雷探索装置の位置が近い場合、地雷が装置により検出され、車両に通知されても、ブレーキが間に合わず地雷と接触してしまう可能性がある。しかし、必要以上に車両から離れてしまうとポータブル通信端末からのリモートコントロールが困難になる。そこで、自動航行制御部は、無線通信部より入力した車両の速度を表す車両速度情報に基づいて車両と本装置との距離間隔を変更・調節する制御、すなわち車両位置情報から特定される車両の位置に最も近い位置と対応付けられた飛行番号と、本装置の飛行予定位置の飛行番号の間隔を変更・調整する制御を行う。このように構成すれば、例えば車両が時速100km/hの高速度で走行している場合は、車両位置に対応する飛行番号と、装置の飛行予定位置に対応する飛行番号の間隔を10ステップと大きく設定して飛行を制御することにより、早めに地雷が検出されるため、車両は余裕を持って停止することができる。
【0067】
飛行制御部は、自動航行制御部より出力される飛行補正信号及び、地面距離検出部より検出される地面との距離に関する情報、障害物検出部より検出される障害物に関する情報、無線通信部より出力される車両速度情報及び飛行操作情報等に基づいて電気モーターの回転数等を制御する。より具体的には、飛行補正信号に基づいて飛行方向を制御する。地面距離検出部より出力される情報に基づいて地面との距離を一定に保つ制御を行う。障害物検出部より出力される情報に基づいて障害物を回避する制御を行う。車両速度情報に基づいて飛行速度を制御する。また使用者が自ら本装置を操作するために送信されて無線通信部より入力される飛行操作情報に基づいて飛行制御が行われる。飛行制御部では飛行補正信号よりも飛行操作情報を優先させて飛行制御を行う。すなわち本装置特有の自動航行制御部により行われる自動航行制御処理に基づいて得られる飛行補正信号が東の方向に飛行することを指示する内容であっても、飛行操作情報が西の方向に飛行することを指示する内容であれば、飛行制御部は飛行操作情報を優先させて西へ飛行する制御を行う。使用者からの飛行指示である飛行操作情報の方が、使用者の意図をより反映しているためである。
【0068】
地雷検出部はレーダーユニットから出力される反射波の受信強度や受信波形、及び、地面距離検出部より検出される地面までの距離に関する情報に基づいて地雷の有無を検出・判定する。地雷検出部において地雷有りと判定された場合は、地雷の存在を示す地雷信号を無線通信部のバッファ部へ出力する。
【0069】
無線通信部において、バッファ部に入力された信号は符号化部でターボ符号化等の符号化処理が行われ、変調部に出力される。変調部では符号化処理後の信号に対して16QAMやQPSK等の変調処理を行い変調処理後の信号を送信部に出力する。送信部では変調処理後の信号に対してD/A変換、アップコンバート等の処理を行い、アンテナを介して車両に備え付けられた通信端末へ出力する。
【0070】
車両において通信端末で地雷信号が受信された場合は、警告音等で車両の運転手に地雷の存在を通知することで地雷との接触を防ぐことが出来る。
【0071】
(実施の形態3)
本実施の形態の地雷探索装置は、実施の形態2における地雷探索装置の機能の一部をポータブル通信端末へ委譲した構成としたものである。
【0072】
地雷探索装置は飛行維持による電力消費が大きいため、長時間地雷探索作業を維持するためには、無駄な処理を省くことが望ましい。そこで本実施の形態の地雷探索装置は、実施の形態2の地雷探索装置において行われている処理の一部を、車両側で担当することにより省電力を図る構成としている。図13に本実施の形態における地雷探索装置のブロック図を示す。
【0073】
GPSなどで構成される位置検出部において検出された本装置の現在位置を示す位置情報は、無線通信部へ出力される。またレーダーユニットで受信した反射波の受信強度や地面距離検出部で検出された地面との距離に関する情報も、無線通信部へ出力される。これらの情報は、無線通信部より車両に備え付けられた通信端末に送信される。
【0074】
通信端末より送信された信号は無線通信部で受信され、受信された飛行補正信号及び飛行操作情報は飛行制御部へ出力される。
【0075】
飛行制御部は、無線通信部より入力した飛行補正信号、飛行操作情報、及び地面距離検出部より入力した地面との距離に関する情報、障害物検出部より検出された障害物に関する情報に基づいて4つのプロペラに接続された電気モーターの回転数を変更・制御する。
【0076】
図14は本装置の使用者が有するポータブル通信端末であり、地雷探索装置を遠隔地から制御できるリモートコントローラーでもある。
【0077】
当該ポータブル通信端末にはスピーカー401が備え付けられ、警告音を発することにより地雷の存在を使用者に警告する。402は警告ランプであり、地雷の存在を使用者に視覚を通じて警告する。
【0078】
当該端末には画像表示部403を有し、画面に地雷探索装置より検出・出力される反射波の受信状況や、記録部に記録された地図情報に、車両位置や地雷探索装置の位置を多重して表示する。使用者は、目視で観察している地雷探索装置の飛行を制御するために入力部404に備え付けられたレバーを操作して、地雷探索装置の飛行速度や飛行方向を操作する。入力された信号は飛行制御情報として、車両位置情報等などと共にアンテナ405を介して地雷探索装置へ送信される。
【0079】
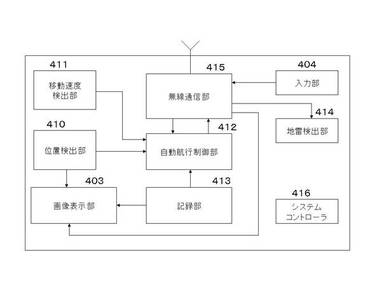
図15に本ポータブル通信端末のブロック図を示す。
【0080】
移動速度検出部411は車輪の回転数など外部から入力した車両の移動方向及び移動速度を生成し、自動航行制御部412に出力する。移動速度検出部411は位置検出部410から入力した位置情報の差分から移動方向及び移動速度を求める構成であっても良い。
【0081】
位置検出部410はGPS及び加速度計を用いて現在の位置を示す位置情報を生成し、画像表示部403及び自動航行制御部412へ出力する。
【0082】
自動航行制御部412は、上記入力した車両の移動速度及び移動方向に関する情報、車両の位置を示す位置情報、記録部413から入力する飛行予定航路情報に基づいて飛行予定航路情報に示される飛行経路に含まれる位置のうち、現在地雷探索装置が飛行すべき位置を求める。自動航行制御部412は、無線通信部415から入力する位置情報が示す地雷探索装置の現在の位置と上記求めた飛行すべき位置との比較を行い、当該差分を埋めるための飛行補正信号を生成し、無線通信部415へ出力する。なお、当該自動航行制御部412の処理内容は、図11に示す自動航行制御部104の処理内容と同一である。本実施の形態により自動航行制御部で行われていた処理が使用者側が保有する端末内で行われることにより地雷探索装置の消費電力を削減できる。
【0083】
無線通信部415は、自動航行制御部412から入力した飛行補正信号及び入力部404から入力した飛行操作情報を地雷探索装置へ送信する。また、地雷探索装置より送信される地雷探索装置の位置に関する位置情報、地雷探索装置のレーダーユニットによって得られた地雷探索結果である反射波の受信強度や空間分布等の受信状況に関する情報、地面と地雷探索装置との距離に関する情報を受信する。受信した上記位置情報は、自動航行制御部412及び画像表示部403に出力され、受信状況に関する情報は、画像表示部403及び地雷検出部414へ、地面との距離に関する情報は地雷検出部414へそれぞれ出力される。
【0084】
画像表示部403では、無線通信部415から入力した地雷探索結果である受信状況に関する情報を波形で表示したり、記録部413に記録されている地図情報を読み取って、位置検出部より入力される車両の位置情報及び無線通信部415から入力される地雷探索装置の位置を示す位置情報を地図に多重して表示したりする。
【0085】
地雷検出部414は、無線通信部415より入力した地雷探索結果である受信状況に関する情報及び地面との距離に関する情報に基づいて地雷検出を行う。たとえば、反射波の受信状況に地面との距離に関する情報に基づく補正を行った後に受信強度が所定の判定地を上回るかどうかの比較処理を行い、比較結果に基づいて地雷を検出する。地雷が検出された場合、端末に備え付けられたスピーカーからの警告音、警告ランプの点滅等の手段によって使用者に地雷の存在を通知する。
【0086】
システムコントローラ416は、端末全体の制御を行う。
【0087】
上記構成により、電力を消費する複数の処理に関して、使用者側の端末を用いて行うことができるため、地雷探索装置における電力消費を抑え、長時間の飛行が可能となる。
【0088】
なお、本地雷探索装置には前方を撮影するカメラを更に備え、無線通信部より、当該カメラで取得された画像を送信するよう構成しても良い。ポータブル通信端末で当該画像が受信され、画像表示部で表示されることにより、使用者は、装置目線で入力部404を通じて本地雷探索装置を操作できるため、障害物の回避などが用意となる。
【0089】
以上、各実施の形態において説明したように、本装置によれば、独立の駆動する複数のプロペラ及び電動モーターにより飛行制御が行われるため、より安定したホバーリングが可能となり、地雷探索など、地面と一定の距離・一定姿勢を保って移動する必要がある飛行に適している。なお、プロペラ及びモーターの数は4つで説明したが、これに限らず例えば6つ又は8つとして設計しても良い。プロペラ数を増やすことにより、電力消費の観点でデメリットはあるものの、より細かな移動が可能となるため、複雑な地形にも対応できる。また、車両型の無人地雷検出装置では、車両が通過する際に地雷に触れてしまい、装置が破壊されるという問題が生じるが、本装置では飛行しているためそのような問題も生じない。
【0090】
なお、当該装置を飛行型ではなく、車両型にすることでも、安全エリアと危険エリアとを区別して記録するという本願第1の発明に関しては達成することは可能である。すなわち、飛行手段を走行手段に置き換え、複数の車輪と、車輪を駆動させるモーターと、現在の位置を検出する位置検出手段と、予定される飛行経路に関する情報を記録する第1の記録手段と、前記検出された位置及び飛行経路に関する情報から飛行方向を補正する信号を生成する生成手段と、前記生成された信号に基づいて走行方向及び走行速度を制御する制御手段と、走行中に地雷を探索する探索手段と、探索結果を探索した位置と対応付けて記録する第2の記録手段と、を具備する地雷探索装置と構成することで、本願第1の発明に関しては達成することができる。ただし、地雷との接触による装置の破壊される場合がある点、地雷が埋蔵されている複雑な地形への対応ができないという課題、地雷探索速度が飛行型と比べて著しく遅く、安全エリアを確保するスピードに欠けるという欠点は残る。
【0091】
また、上記説明では地雷を検出するレーダユニットは送信した電波の反射波の受信状況から地雷を検出する構成を示したがこれに限るものではなく、赤外線カメラで構成し、地表付近の温度分布を検出し、温度分布の検出結果に基づいて地雷を検出しても良いし、光学カメラで構成し、光学的に得られる画像と予め記録した地雷の形とのマッチング処理を行うことで地雷を検出しても良い。また、これらを組み合わせて地雷を検出しても良い。
【0092】
なお、上記説明では地雷を検出するレーダーユニットと、地面との距離を検出する地面距離検出部を別途設けたが、1つに統合し、レーダーユニットにより得られる反射波の受信状況から地面までの距離を検出するよう構成しても良い。
【0093】
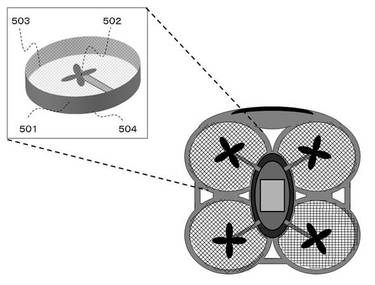
また、地雷検出装置のプロペラ部分を図16に示すようにカバーで覆っても良い。地雷検出を行う地形は草原や山岳地帯も想定され、草や樹木が生えている場所も探索することがあるため、本装置のプロペラ部分がむき出しの状態の場合、草に絡まって走行不能になることがある。そこで、本装置に備え付けられた4つのプロペラであって、プロペラへの気流の供給を可能にしつつ、草木が直接プロペラと接触することを防ぐため、網目状の蓋をプロペラの上下に配置する。すなわち、プロペラの側面をカバーするプラスチックや樹脂で成型された円柱状のサイドカバー501の中空状態の場所にプロペラ502が位置しており、円柱状のサイドカバーの上面と底面を網目状の上面蓋503と底面蓋504で覆うよう構成する。ここのように構成することで、草の覆い茂った場所を低空飛行して地雷探索を行う場合でも、草は底面カバー503によって押し付けられることにより曲げられ、プロペラに絡みつくことがないため、プロペラおよびプロペラと本体をつなぐ接続シャフトを保護することが出来る。
【0094】
なお、上面カバー及び底面カバーは、図17の(1)、(2)に示すように線上のカバーでも良いし、(3)のように同心円状のカバーでも良いし、(4)、(5)のように網目状のカバーであっても良い。地雷探索を行う場所に合わせて網目の細かさや線の間隔が異なるカバーを用いれるよう当該カバーは着脱式であっても良い。当該カバーは軽量アルミホイルや針金、プラスチックなどを成型して製造される。このように空気を通して上面から底面に抜ける気流の流れを発生できるようにした上面の蓋と底面の蓋の中間位置にプロペラを配置し、側面をプラスチックなどの本体フレームで覆うことでプロペラを保護し、草木とプロペラとの接触で飛行不能になることを防ぐことが出来る。
【0095】
なお、上記各実施の形態を組み合わせて本地雷検出装置を構成しても良い。その他、適宜設計変更が可能である。
【産業上の利用可能性】
【0096】
本発明にかかる地雷検出装置は、地雷の検出その他地表のデータ測量など広く利用可能である。
【図面の簡単な説明】
【0097】
【図1】本発明に係る地雷検出装置の概観4面図
【図2】本発明実施の形態1に係る地雷検出装置のブロック図
【図3】地雷情報生成部で作成される地雷情報を表す図
【図4】地雷検出装置の飛行予定経路を示した飛行予定航路情報を示す図
【図5】自動航行制御部による自動航行処理を示すシーケンス図
【図6】飛行制御部による障害物回避プログラムのシーケンス図
【図7】作成された地雷情報を所定の表示プログラムで2次元表示した図
【図8】地雷情報の別の形態を示した図
【図9】地雷情報の別の形態を示した図
【図10】走行する車両と本発明の地雷探索装置の位置関係を示した図
【図11】本発明実施の形態2に係る地雷探索装置のブロック図
【図12】車両及び地雷探索装置の移動予定経路を示した飛行予定航路情報を示す図
【図13】本発明実施の形態3に係る地雷探索装置のブロック図
【図14】本発明実施の形態3に係るポータブル通信端末の概観図
【図15】本発明実施の形態3に係るポータブル通信端末のブロック図
【図16】プロペラ保護用の覆いを被せた本発明の地雷検出装置の概観図
【図17】プロペラ保護用の覆いを表す図
【符号の説明】
【0098】
001,002,003,004 飛行用プロペラ
005 本体ユニット
006 障害物検出部
007 レーダーユニット
008,009,010,011 地面距離検出部
012 バッテリー
013 障害物検出部
101 位置検出部
102 地雷情報生成部
103 記録部
104 自動航行制御部
105 飛行制御部
106 システムコントローラ
107 無線送信部
208 無線通信部
209 地雷検出部
401 スピーカー
402 警告ランプ
403 画像表示部
404 入力部
405 アンテナ
410 位置検出部
411 移動速度検出部
412 自動航行制御部
413 記録部
414 地雷検出部
415 無線通信部
416 システムコントローラ
【技術分野】
【0001】
本発明は、地雷の探索、地雷の検出を行うための地雷探索装置及び探索方法に関する。
【背景技術】
【0002】
世界の紛争地帯では、その安価な製造費と効果の大きさから未だ多くの対人地雷が使用され、多くの命が失われている。近年地雷根絶を目的としたオタワ条約に批准する国が増加しているものの国境問題を抱える世界の主要大国が批准しておらず、実際には紛争地帯へ地雷が供給されているため地雷根絶には程遠い現状がある。そして、紛争が終結した後に残される無数の地雷が一般市民の安全を脅かし、国の復興の足枷になるという重い現実が圧し掛かっている。
【0003】
このような対人地雷の除去方法としては、地雷を破壊する方法と、地雷を解除する方法がある。地雷の威力は非常に強大であるため、地雷を破壊するにはその衝撃に耐えうる特殊重機を用いて地雷を破壊することにより、地雷を安全かつ効率よく除去することが出来る。しかしながら、特殊重機は高価であり、採算の関係上量産することが難しく、また使用可能な地形が限られるため、現実の復興支援において使用は限定されている。
【0004】
そこで、現実においては、人間が地雷検出装置と共に歩きながら地雷を発見し、地雷解除を行うという方法が地雷除去の現場では主流である。このような地雷検出装置として特許文献1に記載の地雷探査装置がある。当該装置の構成によれば、アームとレーダーユニットとが回動機構を介して固着されているため、地面が傾斜していても地面と一定距離を確保することで高い精度で地雷検出を行うことができる技術が開示されている。
【特許文献1】特開2006−250451号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記文献に開示されている装置を用いる場合は、作業者が当該装置を抱えながら歩いて地雷を検出する。検出ミスは作業者自身の死に直結するため、作業者はゆっくりした歩調で確実に検出作業を行うため、地雷の除去効率が非常に悪く、国土に散乱して埋められた地雷を除去し終わるまでに途方もない時間を必要とし、それまでに現地人が地雷と接触してしまう事故が数多く起きている。
【0006】
また、上記装置は、地面と装置のレーダーユニット部分との間に空隙を保つように作業を行う必要があるため作業者の疲労が大きく、また、地雷と装置との接触事故により作業者が被害にあう可能性も否定できない。
【0007】
本願発明は上記従来の課題を鑑み、安全かつ、速やかに地雷を探知・除去するための地雷検出装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本願発明の地雷探索装置は、空中を飛行する飛行手段と、現在の位置を検出する位置検出手段と、予定される飛行経路に関する情報を記録する第1の記録手段と、前記検出された位置及び飛行経路に関する情報から飛行方向を補正する信号を生成する生成手段と、前記生成された信号に基づいて飛行を制御する制御手段と、飛行中に地雷を探索する探索手段と、探索結果を探索した位置と対応付けて記録する第2の記録手段と、を具備する。
【発明の効果】
【0009】
本願発明によれば、地雷探索機能を備えた無人飛行装置が自動航行により地雷の検出作業を行えるため、作業者の地雷探索作業時の危険が無く、効率よく地雷の検出を行うことが出来る。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。
【0011】
(実施の形態1)
図1は、本願第1の実施の形態に係わる地雷検出装置の概観4面図であり、本装置を上面(1)、底面(2)、前面(3)、側面(4)からそれぞれ観察した図を示している。
【0012】
本発明の装置は、本体中央から突き出した4本のシャフトに取り付けられた4つのプロペラ001〜004の回転により本体は飛行・ホバーリングする。4つのプロペラは同一平面内に取り付けられ、それぞれ独立の電気モーターの駆動により独立に回転することにより安定して空中停止及び飛行を行うことが出来る。各電気モーターの回転数は飛行制御部の制御により行われる。プロペラは障害物等との接触を避けるため、内部が中空になった円柱状のフレーム内に備え付けられている。本装置は障害物が比較的多い低空を地面を這う様に飛行するため、プロペラが障害物との接触により破損する可能性が高いためである。そのため、図1に示すように本体中央に円柱状の外枠フレームがサイドガードの役割を果たす形で取り付けられることでプロペラが保護されている。
【0013】
装置本体中央には、本体ユニット005が備え付けられる。本体ユニットは、後述する装置の現在位置を検出する位置検出部、装置の飛行状態を制御する飛行制御部、予定飛行航路を予め記録しておく第1の記録部、飛行位置毎の反射波の受信状況を記録する第2の記録部、飛行位置毎の反射波の受信状況又は地雷の有無に関する情報を外部に出力する出力部等から構成される。
【0014】
前方障害物検出部006は、超音波を送信する送信部と反射波を検出する検出センサー部とから構成される。送信した超音波の反射波の受信強度や遅延プロファイルなどから飛行方向の障害物を検出する。検出センサー部で検出される反射波の上記受信状況は後述する飛行制御部に出力される。
【0015】
レーダーユニット007は、地面に埋蔵された地雷の検出を行う。具体的には電磁波を発生させて地面方向に向けて送信する送信部と反射波を検出・受信する検出センサー部から構成される。送信部から地面に向けて送信された電磁波は地面から反射されて検出センサー部で検出される。反射波は地面に埋蔵された金属物や地面の構造により異なる強度や波形として検出センサー部で検出され、検出された反射波の受信状況などから地雷が検出される。検出される反射波の受信状況は後述する地雷情報生成部に出力される。
【0016】
地面距離検出部008〜011は装置と地面との距離を検出する。具体的には超音波を発生させて地面方向に送信する送信部と反射波を検出する検出センサー部から構成される。送信部から地面に向けて送信された超音波は地面から反射されて検出センサー部で検出される。検出された反射波の受信強度や受信タイミング等に基づいて地面までの距離を求め、当該地面までの距離に関する情報を後述する飛行制御部に出力される。地面までの距離に関する情報は、必要に応じて地雷情報生成部102にも出力される。
【0017】
装置の周辺4箇所に取り付けられた周囲障害物検出部013は、周囲の障害物を検出する。具体的には前方障害物検出部と同様、超音波を送信する送信部と反射波を検出する検出センサー部から構成される。送信部から周囲に向けて送信された超音波は障害物で反射されて検出センサー部で検出される。送信部から送信した超音波のタイミングと検出された反射波の受信タイミングとの時間差などから障害物までの距離を、反射波の受信分布などから障害物の大きさを求め、後述する飛行制御部に出力される。
【0018】
次に本体ユニット005の具体的構成について説明する。図2は本発明における本体ユニットのブロック図である。
【0019】
位置検出部101は、装置の現在位置を検出する。位置検出部101は、主にGPSアンテナ、GPSユニットで構成され、GPSユニットは、複数の衛星から送信された衛星固有のC/Aコード信号をGPSアンテナを介して受信し、各衛星から受信した信号のタイミングを基に各衛星までの擬似距離を算出して現在の位置および時刻を求める。求められた現在位置に関する位置情報は、地雷情報生成部102及び自動航行制御部104に出力される。なお、現在位置は、GPSを用いて求められる現在位置と、別途備えた現在の速度を検出する速度計、現在の移動方向を検出する方向検出計、現在の加速度を検出する加速度検出計により得られる速度情報・方位情報・加速度情報とを用いて現在位置を算出し、位置情報を地雷情報生成部102と自動航行制御部103へ出力しても良い。この構成により、GPSを用いて得られる位置情報のタイミング毎よりも細かいタイミング毎で現在位置を示す位置情報を取得することが出来る。
【0020】
地雷情報生成部102は、位置検出部101から入力した位置情報とレーダーユニットより入力した反射波の受信状況と地面距離検出部から入力した受信状況から地雷情報を生成する。図3は地雷情報の一例を示す。レーダーユニットから入力される反射波の受信強度を所定のサンプリングタイミング毎に位置検出部から入力される位置情報と関連付けて記録する。また、地雷情報生成部102は、レーダーユニットからの反射波の受信強度に、地面距離検出部で検出された本装置と地面までの距離に対する補正を行い、補正後の受信強度の値から地雷の有無の可能性をA、B、Cの3段階で判定し地雷の有無を判定する。例えば、検出番号000123のサンプリングタイミングにおいてレーダーユニットにより得られた反射波の受信強度は16.0dBであり、位置検出部101から入力された位置情報に基づいてそのサンプリングタイミングにおける装置の位置をしめす北緯34”12’5262”、東経132”36’1002”の情報が反射波強度と対応付けて記録されている。反射波の受信強度に対して、地面距離検出部から入力された装置から地面までの距離に対する補正を行った後、当該補正後の受信強度が所定の値より大きいかの判定を行い、地雷の有無を判定し、判定結果が判定結果の取得位置と対応付けられて記録されている。検出番号000123のサンプリングタイミングにおいては、補正後の受信強度が所定値を下回っていたため地雷はないとしてA判定が対応付けられて記録されている。なお、レーダーユニットからの反射波の受信強度は、地面距離検出部からの地面距離に基づいて行われる補正後の受信強度を位置と対応付けられて記録される構成であっても良い。また、地雷有無の判定は5段階評価で判定しても良い。このように本装置が飛行中の各位置において地雷の有無のデータが位置と対応付けられた管理ファイルとして地雷情報が生成されていく。生成される地雷情報は記録部103に出力されて記録・更新されていく。また、地雷情報は無線送信部107にも出力され、必要に応じて無線送信部107より外部へ送信される。
【0021】
記録部103は、地雷情報生成部102から出力される地雷情報を記録する。また記録部103は、装置の飛行予定航路情報を記録する。図4は、使用者より入力された飛行予定航路情報の一例である。予定する飛行位置の順番を示す飛行番号と飛行位置が管理テーブル状に記録されている。また、既にその位置を通過したかどうかも合わせて記録されている。各飛行番号に対応付けられた”飛行済み”が0の場合は、まだその位置を飛行しておらずその位置における地雷探索が終わっていないことを示し、”飛行済み”が1の場合は、既にその位置における地雷探索が終わっていることを示す。当該飛行予定航路情報は、本装置の使用者が予め所定のソフトウェアを用いて作成し、本装置の記録部に記録される。
【0022】
自動航行制御部104は、位置検出部101から入力される位置情報と記録部103から入力される飛行予定航路情報に基づいて飛行を制御する飛行補正信号を生成し、後述する飛行制御部105に出力する。具体的には、自動航行制御部104は記録部103から入力した飛行予定航路情報に示される“飛行済み”が0である飛行番号の位置を読み取る。図4の飛行予定航路情報において、既に飛行番号00006までは“飛行済み”が1になっており、当該飛行番号に対応付けられた位置を既に通過していることを示すため、自動航行制御部は、“飛行済み”が0である飛行番号00007に対応付けられた位置を読み取る。次に読み取った位置と位置検出部101から入力された現在位置との対比を行い、飛行補正信号を生成して飛行制御部105へ出力する。
【0023】
次に自動航行制御部104の処理シーケンスを図5を用いて説明する。自動航行制御部は、記録部に記録されている飛行予定経路情報を読み込む。次に位置検出部101から現在の位置を示す位置情報を入力する。位置情報に示す現在の位置と図4に示す飛行予定航路情報のリストの最初に示されている飛行番号に対応した位置とを比較する。例えば、位置情報が示す現在位置が北緯34度12分52秒12、東経132度36分10秒20であり、飛行予定経路における最初の位置が、北緯34度12分52秒25、東経132度36分10秒12である場合、現在位置は飛行予定位置よりも緯度で0.08秒、経度で0.13秒のずれがある。自動航行制御部104はこの位置のずれを補正するために、上記位置の差分の大きさ及び方向に応じた飛行補正信号を生成し、飛行制御部105に出力する。飛行制御部105では、入力される飛行補正信号に基づいて飛行が制御されることにより、飛行予定経路に従った飛行が行われる。自動航行制御部104は、位置検出部101より現在位置を示す位置情報を入力するタイミング毎に位置情報に示される現在の位置と、飛行予定航路情報に示される現在の飛行予定位置との比較及び飛行補正信号の生成・出力を行う。自動航行制御部104は、位置情報が示す現在位置と飛行予定位置が同一になった時、飛行予定経路情報の当該飛行予定位置の“飛行済み”の欄を0から1に書き換え、飛行予定経路に含まれるこの飛行予定位置は既に飛行済みとして、次の飛行番号に示される位置を読み取り、この位置を新たな飛行予定位置として現在位置とを比較し、上記と同様に飛行補正信号を生成して飛行制御部105へ出力する。飛行予定航路情報に示される位置すべてに関して飛行済みになった場合は、使用者により予め指定された範囲における地雷探索は完了したとして、地雷探索を終了し、予め記録されている初期位置が示す飛行場や格納倉庫へ帰還する。または飛行予定航路情報の最後の飛行番号に対応する飛行予定位置として帰還位置である飛行場の位置を記録して本装置を帰還させても良い。
【0024】
上記のように本発明の地雷探索装置では、自動航行機能を備え、予め複数の位置から構成される飛行経路を装置に読み込ませておく。そして実際に飛行経路に従って飛行する間に地面方向に向かって地雷検出用の電波を発信し続け、地面からの反射波を受信する。受信された反射波は、飛行位置と対応付けられて記録される。当該構成により、予め定めた範囲の中で地雷が発見された場所と地雷が発見されなかった場所を記録する。
【0025】
飛行制御部105は、独自の飛行制御プログラムを実行し、自動航行制御部104から出力される飛行補正信号、障害物検出部から得られる障害物情報、地面距離検出部より得られる地面までの距離に関する情報に基づいて、各プロペラを駆動させる電気モーターの回転数及びプロペラの角度を制御することで装置の飛行を制御する。
【0026】
具体的には、地面距離検出部から得られる情報により、地面までの距離が所定の距離よりも離れている場合は、4つのプロペラの回転数を上げることにより、装置を上昇させて地面までの距離を適切な所定距離へと誘導することで装置が地面へ接触することを防ぐ。逆に地面までの距離が所定の距離以上である場合は、レーダーユニットにおける地雷の検出精度が下がるため、4つのプロペラの回転数を下げることで地面までの距離を適切な距離に調節する。
【0027】
また、自動航行制御部104より入力される飛行補正信号は、現在位置と飛行予定位置との差分の方向及び大きさに応じたベクトル情報であり、飛行制御部105は、当該差分の方向及び大きさに応じて4つの電気モーターの回転数を制御することで、現在位置を飛行予定経路に乗せる制御を行う。
【0028】
また、障害物検出部により、進行方向に障害物を検出した場合は、飛行制御部105に記録された障害物回避プログラムに従って障害物を回避する。飛行制御部105は、障害物回避プログラムが作動する場合、所定のアルゴリズムに従い飛行高度を上げる、飛行経路から一度外れるなどの第1の回避行動を行うための所定の飛行制御を行う。また、第1の回避行動で回避できない場合は、自動航行制御部104に対して、現在の飛行予定位置を所定数スキップした飛行番号の飛行予定位置をターゲットとして現在位置との比較及び飛行補正信号の生成を指令する。すなわち、進行方向の前面に備え付けられている前方障害物検出部によって障害物が検出された場合は、飛行予定航路情報に示される現在の飛行予定位置ではなく、現在の飛行予定位置よりも後続の飛行予定位置を新たな現在の飛行予定位置と設定し、この新たに設定された現在の飛行予定位置と位置検出部101から出力される位置情報に示される現在の位置とを比較することで飛行補正信号を生成し、飛行制御部に出力する。このように障害物回避プログラムより第2の回避行動を行うための指令が出されることで予め時系列状に飛行予定位置が記録されている飛行予定航路情報の現在の飛行予定位置を変更することで障害物が回避できる。また第2の回避行動を行うための指令により、自動航行制御部において現在の飛行予定位置よりも後続の飛行予定位置を新たな現在の飛行予定位置と設定されて回避行動が行われても、障害物を回避できない場合は、さらに後続の飛行予定位置を新たな現在の飛行予定位置と再設定する第3の回避行動を行う指令が出され、この指令に従ってより障害物を大回りに回避する行動をとることにより、障害物を適切に回避できる。
【0029】
図6は、上記障害物回避プログラムを用いた障害物回避のための処理シーケンスを示した図である。
【0030】
障害物検出部により、進行方向に障害物を検出した場合(ステップ1)は、飛行制御部に記録されたプログラムが作動し、飛行制御部は、第1の障害物回避行動を行う(ステップ2)。第1の障害物回避行動は、飛行高度を上下する制御を行う、又は現在の飛行予定位置に対して、通常の飛行ルート(最短経路となるように飛行する)ではなく、所定のアルゴリズムに基づいた複数の回避飛行ルートを作成・選択し、現在の飛行予定位置への移動を試みる。この第1の障害物回避行動は、例えば進行経路に岩や段差などの障害物がある場合に、有効にそれを回避することができる。
【0031】
上記回避行動プログラムに従って回避行動を行い、回避行動後においても障害部検出部によって現在位置と現在の飛行予定位置との間に障害物が検出された場合、飛行制御部は第2の障害物回避行動を行う。第2の障害物回避行動では、例えばその飛行予定位置に樹木が生えている、建物が建っているなど、物理的にその位置に辿り着けないと判断し、その飛行予定位置を通過することを中止し、飛行予定経路を構成する時系列状に配置された複数の飛行予定位置のうち、現在の飛行予定位置の次に予定されている飛行予定位置を新たな現在の飛行予定位置と再設定する指示信号を自動航行制御部104へ出力する。自動航行制御部104において、当該指示信号に基づいて上記飛行予定位置の再設定が行われ、当該新たな飛行予定位置と現在位置との差分の大きさ及び方向に応じた飛行補正信号が生成され、飛行制御部へ入力されることで、障害物の回避が可能となる。なお、この時飛行制御部105は、飛行補正信号に基づいて電気モーターの回転数を制御するが、この第2の障害物回避行動と合わせて第1の障害物回避行動を組み合わせてもよい。例えば、飛行高度を変化させる、所定の回避アルゴリズムに基づいて飛行補正信号が示す飛行方向と直角方向に所定距離・所定時間飛行した後、新たに自動航行制御部104から出力された飛行補正信号に基づいて現在の飛行予定位置を目指して飛行する。
【0032】
上記第2の障害物回避行動を行っても、障害物が回避できずに予定飛行位置へ到達できない場合、飛行制御部は第3の回避行動プログラムを作動させる。自動航行制御部104で再設定された新たな飛行予定位置への航路で障害物が検出された場合は、再度飛行予定位置を変更させる。飛行制御部105は、自動航行制御部104に再度飛行予定位置を変更させる指示信号を出力する。自動航行制御部は、上記指示信号を入力すると、第2の障害物回避行動において再設定した飛行予定位置よりもさらに先の飛行予定位置を現在の飛行予定位置に再設定し、位置検出部より入力する現在位置と、再設定された新たな飛行予定位置との差分を飛行補正信号として生成し、飛行制御部105へ出力する。飛行制御部では新たに設定された飛行予定位置に対する自動航行に従って入力された飛行補正信号に基づいて飛行制御を行うことにより、障害物を適切に回避しつつ自動で地雷検出を行うことが可能となる。
【0033】
なお、第3の障害物回避行動を行っても障害物を回避できない場合は、飛行制御部105は、袋小路に迷い込んだと判断して、帰還用プログラムである第4のプログラムを実行させる。飛行制御部105において帰還用プログラムが作動されると、飛行制御部105は自動航行制御部104に帰還指示信号を出力する。自動航行制御部104は、飛行制御部から帰還指示信号を受信すると、記録部に記録されている初期位置から現在位置までのこれまでの飛行経路を読み込み、これまでの飛行経路を時系列を遡って逆走することで初期位置まで戻るように自動航行が行われる。このように構成することで、本装置がデッドロックに陥った場合でも適切に帰還させることが出来る。なお、所定の位置までの帰還方法は飛行経路を逆走する方法に限るものではなく、帰還用プログラムを実行し、自動航行制御部は帰還指示信号に基づいて予め設定されている帰還用の位置である所定の位置を飛行予定位置と再設定し、当該飛行予定位置と現在位置に基づいて飛行補正信号を生成して飛行制御部へ出力する。飛行制御部では飛行補正信号に基づいて飛行方向を決定すると共に、高度を地雷探索モードで設定される地面付近の低い高度から帰還モードで設定される障害物の少ない高い高度に設定し、障害物のない上空を飛行して所定位置まで帰還する。位置検出部より出力される現在位置と設定された所定の位置が同一になった場合、自動航行制御部は所定位置に到達したと判断して、着陸信号を生成して飛行制御部に出力する。飛行制御部は自動航行制御部より着陸信号を入力する所定の速度で高度を下げて着陸する。
【0034】
本発明の地雷検出装置では、地面に埋蔵・設置された地雷の検出を目的としており、地面との距離が離れるほどレーダーユニットにより受信される反射波のS/N比が劣化する。従って、例えば地面距離検出部で検出される地面から本装置までの距離が20cm〜1m程度を保つよう低く飛行することが望ましい。しかしながら、このような低空飛行を行う場合には、上空高く飛行する場合とは異なり、地面の起伏や樹木、岩、電信柱、建物、車、人間、動物など、様々な障害物か飛行経路に立ちふさがる可能性がある。このような障害物と遭遇し、障害物検出部において障害物が飛行経路内に検出された場合に、回避プログラムを作動させ、本装置が適切な回避行動を自動的にとることができるよう構成することで、外部からの操作をすることなく、地雷探索活動を継続することが出来る。
【0035】
ここで、上記第2、第3の障害物回避行動において、飛行制御部から自動航行制御部へ出力される指示信号は、障害物検出部により検出される障害物の状況に基づいて異なる指示信号が出力されても良い。飛行制御部は、例えば、障害物検出部により受信される反射波の受信強度や受信分布などに基づいて、対応する指示信号を自動航行制御部に出力する。自動航行制御部は、対応する指示信号に応じて適切な飛行予定位置を再設定するよう構成しても良い。例えば、飛行制御部は、障害物回避行動において高度の変更、飛行経路の変更など第一の回避行動が行われている間に障害物検出部によって検出される反射波の受信強度及び受信分布等に基づいて対応する指示信号を自動航行制御部へ出力し、自動航行制御部において指示信号の内容に応じて新たな飛行予定位置を再設定してもよい。例えば、障害物検出部において得られた反射波の受信分布が広い場合は、飛行制御部において第2の回避プログラムにより、障害物が大きいとして受信分布の広さに対応した指示信号が生成されて自動航行制御部に出力される。自動航行制御部では、飛行航路情報に示される現在の飛行予定位置として設定されている位置に対応する飛行番号から指示信号で指定された数だけスキップした飛行番号に対応する位置を新たな飛行予定位置として設定し、当該新たな飛行予定位置と現在位置との方向及び大きさの差分に対応した飛行補正信号を生成して飛行制御部に出力することで障害物を適切に回避できるよう構成しても良い。
【0036】
なお、上記説明では第3の障害物回避行動において所定の飛行番号分スキップした飛行番号と対応付けられた位置を飛行予定位置を再設定する方法を説明したがこれに限らず、例えば所定のアルゴリズムに基づいて現在の飛行予定位置の方向と所定の角度以上異なる方向の位置を飛行予定航路情報に含まれる複数の位置から選択し、新たな飛行予定位置として設定してよいし、飛行予定航路情報において時系列状に並べられた飛行済みでない飛行番号を所定のアルゴリズムに従って時系列を再配置して新たな飛行予定航路情報として組み換え、組み換えた飛行予定航路情報に従って現在の新たな飛行予定位置を設定してもよい。
【0037】
なお、上記説明では飛行予定航路情報に含まれる複数の位置に関して、飛行することで地雷探索が行われた位置について「飛行済み」と書き換えることにより、通過した位置と通過していない位置とが分けられる構成を説明したが、例えばその位置を飛行することで地雷検出が終わった位置について飛行予定航路情報から削除していく構成としてもよい。このように構成することで飛行が終わった位置に関する情報は、飛行予定航路情報から随時削除されていくため、飛行予定航路情報に含まれる最上位の飛行番号に対応する位置が現在の飛行予定位置となる。また、第2、第3の障害物回避プログラムが実行されることにより、飛行予定航路情報に含まれる複数の位置であって、スキップされた位置については、再度その位置について本装置が地雷探索を試みないように、飛行予定航路情報に含まれる“飛行済み”の欄を飛行済みでないことを示す“0”からスキップされた位置であることを示す“2”に書き換える処理を行っても良い。また、この位置について飛行済みとして書き換えても良いし、当該スキップされた位置と対応する飛行番号について飛行予定航路情報から削除する処理を行っても良い。
【0038】
上記の地雷探索作業により地雷検索装置で生成された地雷情報は、メモリーカードなど着脱式の記録媒体や、本装置に備え付けられた入力端子から、又、無線送信部より無線送信されるなどの手法により外部へ出力される。出力された地雷情報は、地雷除去作業の作業者が作業中に携帯するポータブル端末で読み込まれる。
【0039】
次に、上記説明した地雷探索により得られるデータについて説明する。図7は、上記地雷探索によって得られた地雷情報を所定プログラムを用いて2次元状で表示した図である。地雷除去作業を行う作業者はポータブル端末を備え当該地雷情報を2次元状で表示させる。以下当該ポータブル端末で実行されるプログラムについて説明する。
【0040】
当該プログラムはポータブル端末に記録された地雷情報に基づいて図7に示す地図を表示する。地雷情報には位置と地雷の有無が対応付けられて記録されており、この情報を読み込んでポータブル端末の画面上に表示させる。
【0041】
なお、ポータブル端末は現在の位置を検出するGPS機能を備えており、当該プログラムはGPS機能により検出された現在の位置を読み込んで、当該位置に対応する画面上の場所に自分の位置を示すアイコンをオーバーレイ表示する。
【0042】
図7において灰色の四角の領域は、予め使用者から指定された飛行予定航路情報に従って本地雷探索装置において地雷探索が行われた範囲を示す。ここで、201は作業者の現在位置を示すアイコンである。202,203は地雷を表すアイコンであり、この位置に地雷が埋まっていることを示している。204〜206は、図3に示す地雷情報において地雷の可能性があることを示すB判定であった位置について注意を促すアイコンが表示されている。例えば地面に空き缶などが転がっていた場合は、地雷探索において空き缶の位置について地雷の可能性ありとしてB判定として地雷情報が記録されるからである。207,208,209は上記説明した障害物回避行動により、飛行予定経路に含まれる範囲内であったが地雷探索が行われなかった位置を示している。
【0043】
作業者はポータブル端末の画面を確認しながら、地雷情報においてA判定とされた地雷の位置、B判定とされた地雷の可能性のある位置、地雷探索エリア内であって地雷探索が行われなかった位置について手動で地雷の有無の確認作業を行い、必要に応じて地雷除去作業を行う。
【0044】
なお、ポータブル端末において、GPSにより検出された現在位置と地雷情報に記録されたA判定、B判定とされた位置又は地雷探索が行われなかった位置までの距離が一定距離以内に入ったときは、ポータブル端末に備え付けられたスピーカーから警告音を発するように構成されることが望ましい。作業者は、画面を確認しながら地雷除去作業を行うが、画面に表示された地雷を見落とした場合に作業者が危険にさらされる。そこで、作業者が地雷の可能性がある場所に近づいた場合は、警告音発声機能や装置を振動させるバイブレーション機能に基づいて作業者に地雷の位置を再確認させる機能を有する構成とすることで、より安全に地雷除去が可能となる。なお、A判定、B判定、探索が行われなかった位置毎に警告音の大きさや種類を変えて警告できることが望ましい。
【0045】
また、当該ポータブル端末の表示画面にタッチパネル機能を備え、地雷除去又は確認作業が終了した位置の地雷アイコン等を触れることで当該位置について地雷除去・確認作業が終了したことを示すフラグアイコンを立てることができるよう構成しても良い。そのように構成することで、作業者が地雷探索範囲内でどの位置について既に確認済みであるかが一目瞭然となるため、勘違いにより同じ場所を何度も掘り返すといった2度手間を防ぐことが出来る。
【0046】
以上に説明したように、本発明の地雷探索装置は、電気モーターやプロペラなどから構成される飛行手段と、地雷を検出する地雷検出手段と、GPSのように現在位置を検出する位置検出手段と、飛行する航路に関する飛行予定航路情報を記録する第1の記録手段と、検出された現在位置と記録されている飛行予定航路情報とに基づいて飛行を制御する飛行制御ユニットと、地雷検出結果を検出位置と対応付けて記録する第2の記録手段とを有する。このように自動で地雷を検出させることで地雷除去作業者の作業量を大幅に減らすことができる。
【0047】
地雷は1つでも残せば市民の安全な生活を脅かしてしまう性質を有する兵器であるため、ある領域を安全エリアとして確立するためには、作業者はたった一つであっても地雷を見つけるために広大なエリアの探索をしなければならなかった。すなわち、地雷の検出作業というものは、地雷のない広大なエリアも念のために確認作業を行う必要があるものであり、そのことが地雷除去のスピードを遅らせる原因となっていた。このためには、地雷を検出するだけでは安全エリアの確立はできない。地雷がある場所と安全である場所を明確に区分けする必要がある。換言すれば「ここに地雷がある」という情報のみでは目的を達成できず、「ここは安全である」という情報を取得し、広大なエリアの中から安全ではない場所を抽出し、その抽出された限定領域について地雷確認作業・地雷除去作業を行うことにより、そのエリア全体について初めて安全宣言を出すことができるのである。
【0048】
上記点に着目し、本願発明では探索を行った範囲と地雷の有無の両方を記録する。図7に示すように、探索の結果、安全な場所はクリアされるため、作業者は地雷が検出された場所や、地雷の可能性がある場所、障害物があって本装置が通過できなかった場所に限定して赴き、地雷除去・地雷確認作業を行えばそのエリアの地雷除去作業は終了する。すなわち、本装置を用いることにより、人的に地雷除去作業を行う必要がある領域を大幅に限定させることが出来るため、地雷除去作業効率が飛躍的に向上するため、戦後復興処理において速やかに地雷を除去し、農地の開拓や居住エリアの確保を行えるため戦争で疲弊した国を早急に立て直すことができる。
【0049】
なお、上記説明では、飛行予定位置と現在位置とが同一の場合に、その飛行予定位置は通過済みとして次の飛行予定位置へ飛行する構成について説明したが、これに限るものではなく、例えば現在の位置情報に示される現在位置と過去の位置情報に示される現在位置とを直線補間して得られる位置が飛行予定位置とほぼ同一又は所定の誤差の範囲内である場合は、既にその飛行予定位置は飛行済みとして処理しても良い。現在位置を示す位置情報は、位置検出部101から所定のタイミング毎に出力されるため、飛行予定位置に示す場所を通過している場合もあるからである。例えば、現在の位置情報に示される現在位置が北緯34度12分52秒12、東経132度36分10秒20であり、1つ前の位置情報に示されていた現在位置が、北緯34度12分52秒12、東経132度36分10秒04であった場合、この2点を線形補完して得られる北緯34度12分52秒12、東経132度36分10秒04〜20の位置は既に飛行済みであるとして、この位置範囲に現在の飛行予定位置が含まれているかを比較する。例えば飛行予定位置が北緯34度12分52秒12、東経132度36分10秒14であった場合は、既にこの飛行予定位置は本装置が通過済みであり、この位置においてレーダーユニットの受信部において反射波が受信されているため、この位置の地雷探索は行われているものとして、この飛行予定位置は飛行済みに書き換えて次の飛行予定位置と現在位置の比較へ移る。このように処理することで、高速度で飛行しながらでも適切に自動航行が可能となる。
【0050】
また、障害物検出部は電磁波を定期的に送信する送信部と反射波を受信する受信部と、受信した反射波の受信強度や空間分布などを解析して障害物の検出処理を行う処理部とから構成されてもよい。飛行制御部は、当該障害物検出部で検出された障害物までの距離及び障害物の大きさに基づいて対応する指示信号を生成し、自動航行制御部へ出力する。自動航行制御部では、入力した指示信号に基づいて飛行予定航路情報の中から適切な位置を現在の飛行予定位置に設定する。例えば検出された障害物が大きい場合、新たな飛行予定位置として現在の飛行予定位置の次の飛行予定位置に変更しても、障害物を回避しきれないことも多い。そこで、大きい障害物に対応する指示信号を飛行制御部から入力した場合は、現在の飛行予定位置から大きさに応じた所定のステップ分先の飛行予定位置を新たな飛行予定位置に再設定して自動航行を行っても良い。障害物の大きさに応じて現在の飛行予定位置よりも大きくかけ離れた場所が飛行予定位置に設定されることで障害物を大きな回避ルートを通って適切に回避できる。その他、障害物検出部を光学カメラで構成し、光学的に取得された画像から障害物を判定・検出するよう構成しても良い。
【0051】
なお、本装置においてバッテリー残量を検出する検出部を新たに有し、バッテリーの残量が予め設定された所定の残量よりも少なくなった場合に、地雷探索を強制終了し、初期位置又は使用者から無線指示された所定の位置へ帰還する制御を行うよう構成しても良い。本装置が自動航行する場合に、障害物の回避による飛行距離の延長などが原因で当初の予定よりも本装置のバッテリーの消費が激しく、地雷探索を終了する前にバッテリー切れで墜落してしまうことが想定され、本装置の破損や行方不明に繋がってしまう。そこで、本装置において、予め地雷探索を中断するバッテリー残量の値を設定する設定部と、バッテリー残量を検出するバッテリー残量検出部と、この設定されたバッテリー残量の値と検出された現在のバッテリー残量の比較を行う比較部を有し、現在のバッテリー残量が設定されたバッテリー残量を下回った場合に、当該比較部は、バッテリー残量を下回ったことを示す信号を自動航行制御部に出力し、自動航行制御部は、入力した上記信号に基づいて、飛行予定航路情報に基づく地雷探索用の航行モードから、これまでの飛行経路を記録した飛行経路情報に基づく帰還用の帰還モードに変更され、予め指定された帰還用位置を飛行予定位置と設定することにより帰還用の位置又は初期位置へ帰還するよう構成されていても良い。自動航行制御部では、位置検出部より入力される現在位置と帰還用の位置または初期位置との差分の大きさおよび方向に基づく飛行補正信号が飛行制御部へ入力されることにより、最終的に所定の位置へ帰還できる。
【0052】
なお、上記説明では、比較部は予め設定されたバッテリー残量の値と現在のバッテリー残量の値とを比較する構成を説明したがこれに限るものではなく、位置検出部より入力される現在位置と予め設定された所定の帰還位置までの距離に応じて帰還モードに変更するバッテリー残量の値を求め、当該求められた値と検出部で検出されるバッテリー残量の値とを比較するよう構成しても良い。バッテリー残量が少なくなっていても現在の飛行位置が帰還位置と近ければ帰還可能であるため、地雷探索作業を続けて継続することが可能となる。
【0053】
なお、本装置が地雷探索作業中に岩などの障害物との接触による破損、樹木と絡まるなどのアクシデントにより身動きが取れなくなる場合が想定される。この場合、本装置の使用者は、装置を回収するために、飛行予定航路情報で指定した範囲内を探し回らなければならない。そこで、自動航行制御部は、飛行補正信号を飛行制御部に一定期間出力しても、位置検出部で検出される現在位置が所定の移動量以上移動しない場合は、スタックしていると判断し、飛行制御部に回避信号を出力する。飛行制御部は、自動航行制御部から、回避信号を受信すると、現在装置が陥っているトラブルを回避するための回避プログラムを起動させる。当該回避プログラムを起動すると、周囲に取り付けられた障害物検出部により検出される障害物の距離が最も大きい方向に移動を試みる、その場で高速回転を行う、高度を急上昇させる等の所定の飛行制御を行い、現状の打開試みる。当該回避プログラムに従ってトラブルの回避を試みた後、自動航行制御部は飛行補正信号を一定期間飛行制御部に出力しても位置検出部から入力される現在位置がほぼ同一である場合は、自力でのトラブル回避は不可能と判断し、緊急信号を生成してシステムコントローラ106に出力する。システムコントローラ106は緊急信号を入力すると、位置検出部101に現在位置を示す位置情報を無線送信部へ出力させる指示を、地雷情報生成部102にこれまでに生成した地雷情報を無線送信部へ出力させる指示をそれぞれ行う。無線送信部は入力したこれらの情報を無線送信する。このように構成することで、本装置がスタックして身動きが取れなくなっても、本装置の位置を示す情報及びそれまでの地雷情報が使用者へ送信されるため、使用者は受信した本装置の場所を示す位置情報に基づいて装置の回収を速やかに行うことが出来る。システムコントローラ106は、その他装置全体の制御も行う。
【0054】
なお、飛行経路に関する情報は記録部103に記録される構成を示したが、SDカードやフラッシュメモリーのようなメモリーカードに記録される構成であっても良い。本体ユニット005は、メモリーカードを挿入するメモリーカードスロットを有し、自動航行制御部は、当該メモリーカードスロットに挿入されたメモリーカードに記録された飛行予定航路情報に基づいて経路補正を行う構成であっても良い。
【0055】
なお、飛行予定航路情報を記録する記録部と地雷情報を記録する記録部は同一であってもよいし、異なる2つの記録部を用意して別々に記録しても良い。また、本装置にはメモリーカードスロットを1つ保有し、メモリーカードに飛行予定航路情報を記録して本体に装着し、自動航行制御部が当該メモリーカードから飛行予定航路情報を読み取り、地雷情報生成部は、生成した地雷情報を当該装着されているメモリーカードに記録するよう構成しても良い。
【0056】
なお、上記説明では地雷情報は、図3に示すように地雷探索位置と当該位置における地雷探索結果が対応付けられて地雷情報として記録される構成を示したが、これに限るものではない。例えば図8にしめすように、地雷情報生成部は飛行予定航路情報に基づく自動航行により、実際に飛行し、地雷探索を行った位置について飛行完了位置情報として1つのファイルを作成し、レーダーユニットから入力される飛行中の地雷探索結果に関しては、地雷探索結果情報として1つのファイルを作成し、個別に管理する構成であっても良い。これら2つのファイルにおいて、地雷探索位置と当該位置での地雷探索結果が対応付けられて記録されることにより、地雷情報として1つのファイルに纏める場合と同様の結果を得ることが出来る。なお、図8の場合では、飛行完了位置情報の中で地雷探索位置が固有に割り当てられた番号と対応付けられており、地雷探索結果情報の中で当該番号と地雷探索結果が対応付けられて記録されていることにより、地雷探索位置と地雷探索結果が対応付けられて記録される。
【0057】
また、図9に示すように実際に飛行し、地雷探索を行った位置について飛行完了位置情報として1つのファイルを作成し、地雷の有無を示す1のファイルを作成しても良い。地雷の有無を示すファイルは、レーダーユニットから入力する反射波の受信強度に地面距離検出部で検出された地面までの距離に基づく補正を行い補正後の受信強度と所定の値とを対比して地雷の有無を判定し、判定結果を飛行番号と対応付けて記録している。当該飛行番号は、飛行完了位置情報において地雷探索位置と対応付けられているため、当該2つのファイルを作成することで、安全エリアと危険エリアとを知ることが出来る。これら2つのファイルを合わせて地雷情報として記録する。
【0058】
地雷の発見のみを目的とする場合は、地雷がある場所のみを記録すればよいことになるが、安全な領域を確保するという観点に立てば、地雷の場所を記録するというだけでは目的を達成できない。すなわち、どのエリアは地雷がない安全地帯であり、どのエリアは地雷が埋蔵されているかの両方を記録する必要がある。そこで本発明では、地雷探索を行ったエリアについて、反射波の受信強度等の受信状況を地雷検出結果として位置と対応付けて記録する。また、必要に応じて、上記受信状況を解析し、解析の結果、上記検出作業において地雷が検出されなかった位置は、地雷が埋蔵されていないとして安全エリアであることを意味するA判定を、地雷が検出された位置は、地雷が埋蔵されているとして危険エリアであることを意味するC判定を、地雷がある可能性がある位置は、注意エリアとして注意エリアであることを意味するB判定を、それぞれ位置と共に記録する。このように地雷が検出された場所と検出されなかった場所の両方に関して、地雷探索位置と対応付けて記録することで、どのエリアが危険であるということのみならず、どのエリアは安全であるかというデータを取得することができるため、危険エリアの地雷を除去すれば、自動航行により地雷探索が行われた範囲に関して安全であることを保証でき、現地民に素早く土地を開放することが出来る。
【0059】
(実施の形態2)
本実施の形態の地雷探索装置では、リアルタイムで地雷の検出を行うことを可能としたものである。
【0060】
世界を見渡すと未だ多くの国で紛争状態が続いている。紛争地帯ではPKOが治安維持に当たっているが、反政府勢力は現在の勢力分布のまま紛争が終結することを望まないことも多々有り、PKOの車両を狙って地雷を仕掛ける事件が散見される。地雷は短時間で設置が可能であるため、テロリストが予め車両が通過するという情報を獲得し、通過に合わせて地雷を設置する場合には、これを防ぐ手立ては限られてくる。本実施の形態の地雷探索装置ではこのような地雷に対して適切に除去することを目的としている。
【0061】
図10は本発明の地雷探索装置の使用方法を示した図である。走行する車両1001の進行方向前方に地雷探索装置1002と1003が飛行している。車両が通過する前に車両通過予定位置に対して地雷探索を行い、地雷が発見された場合は車両に地雷の存在を通知する。
【0062】
図11は本発明の地雷探索装置のブロック図である。なお、図1と同一のブロックに関しては一部説明を省略する。
【0063】
地雷探索装置は、新たに無線通信部208を有する。無線通信部内の受信部では、アンテナを介して受信された信号に対してダウンコンバート、A/D等の受信処理を行い、処理後の信号を復調部へ出力する。復調部は入力した信号に対して復調処理を行い、処理後の信号を復号化部へ出力する。復号化部では、入力した信号に対して復号化処理を行い処理後の信号がバッファ部へ出力される。バッファ部に出力される信号は、主に車両の位置を表す車両位置情報、車両の速度を表す車両速度情報、車両から送信される飛行操作情報、他の地雷探索装置から送信される飛行情報などが含まれる。バッファ部で一時保存されたこれらの情報はシステムコントローラ106の制御に従って、復号化された信号を適切なブロックへ出力する。
【0064】
自動航行制御部104は、位置検出部から入力した現在位置及び図示せぬ一時記録部に記録された飛行予定航路情報に基づいて自動航行を行う。飛行予定経路情報は予め使用者から無線入力された車両が走行する経路すなわち本装置の飛行経路に関する情報である。また自動航行制御部は無線通信部より、車両の位置情報及び車両速度情報を入力し、これらの情報に基づいて飛行予定経路情報の中から現在飛行すべき位置を求め、現在位置との差分の大きさ及び方向から飛行補正信号を生成して飛行制御部105に出力する。
【0065】
図12は上記飛行予定航路情報を示している。時系列状に並べられた飛行番号毎に飛行予定位置が対応付けられて管理テーブルとして記録されている。管理テーブルに示された「●」は、現在の車両の位置を表し、無線通信部より入力された車両位置情報から特定される。自動航行制御部は、車両位置情報に示す現在の車両位置と最も近い位置を示す飛行番号の位置を車両が走行していると判断する。この場合では車両位置情報に示される位置が、飛行番号005に対応する北緯34”12’5266”、東経132”36’1011”の場所に最も近かったため、車両は飛行番号005に対応する位置を通過していると判断する。本装置は車両に先立って飛行し、地雷探索を行う必要があるため、車両のいる飛行番号005の位置から3ステップ先の飛行番号008を現在の飛行予定位置と設定し、当該飛行予定位置と現在位置との差分から飛行補正信号を生成して飛行制御部に出力する。なお、テーブルには飛行予定位置に対応する飛行番号に本装置の飛行予定位置を示す「◎」が表示されている。
【0066】
なお、上記説明では車両の走行位置に最も近い位置の飛行番号から3ステップ先の飛行番号の位置を飛行予定位置として設定したが、何ステップ先を飛行予定位置とするかは、無線通信部より入力される車両速度情報に基づいて決定されても良い。例えば、車両が高速度で走行している場合、車両位置と地雷探索装置の位置が近い場合、地雷が装置により検出され、車両に通知されても、ブレーキが間に合わず地雷と接触してしまう可能性がある。しかし、必要以上に車両から離れてしまうとポータブル通信端末からのリモートコントロールが困難になる。そこで、自動航行制御部は、無線通信部より入力した車両の速度を表す車両速度情報に基づいて車両と本装置との距離間隔を変更・調節する制御、すなわち車両位置情報から特定される車両の位置に最も近い位置と対応付けられた飛行番号と、本装置の飛行予定位置の飛行番号の間隔を変更・調整する制御を行う。このように構成すれば、例えば車両が時速100km/hの高速度で走行している場合は、車両位置に対応する飛行番号と、装置の飛行予定位置に対応する飛行番号の間隔を10ステップと大きく設定して飛行を制御することにより、早めに地雷が検出されるため、車両は余裕を持って停止することができる。
【0067】
飛行制御部は、自動航行制御部より出力される飛行補正信号及び、地面距離検出部より検出される地面との距離に関する情報、障害物検出部より検出される障害物に関する情報、無線通信部より出力される車両速度情報及び飛行操作情報等に基づいて電気モーターの回転数等を制御する。より具体的には、飛行補正信号に基づいて飛行方向を制御する。地面距離検出部より出力される情報に基づいて地面との距離を一定に保つ制御を行う。障害物検出部より出力される情報に基づいて障害物を回避する制御を行う。車両速度情報に基づいて飛行速度を制御する。また使用者が自ら本装置を操作するために送信されて無線通信部より入力される飛行操作情報に基づいて飛行制御が行われる。飛行制御部では飛行補正信号よりも飛行操作情報を優先させて飛行制御を行う。すなわち本装置特有の自動航行制御部により行われる自動航行制御処理に基づいて得られる飛行補正信号が東の方向に飛行することを指示する内容であっても、飛行操作情報が西の方向に飛行することを指示する内容であれば、飛行制御部は飛行操作情報を優先させて西へ飛行する制御を行う。使用者からの飛行指示である飛行操作情報の方が、使用者の意図をより反映しているためである。
【0068】
地雷検出部はレーダーユニットから出力される反射波の受信強度や受信波形、及び、地面距離検出部より検出される地面までの距離に関する情報に基づいて地雷の有無を検出・判定する。地雷検出部において地雷有りと判定された場合は、地雷の存在を示す地雷信号を無線通信部のバッファ部へ出力する。
【0069】
無線通信部において、バッファ部に入力された信号は符号化部でターボ符号化等の符号化処理が行われ、変調部に出力される。変調部では符号化処理後の信号に対して16QAMやQPSK等の変調処理を行い変調処理後の信号を送信部に出力する。送信部では変調処理後の信号に対してD/A変換、アップコンバート等の処理を行い、アンテナを介して車両に備え付けられた通信端末へ出力する。
【0070】
車両において通信端末で地雷信号が受信された場合は、警告音等で車両の運転手に地雷の存在を通知することで地雷との接触を防ぐことが出来る。
【0071】
(実施の形態3)
本実施の形態の地雷探索装置は、実施の形態2における地雷探索装置の機能の一部をポータブル通信端末へ委譲した構成としたものである。
【0072】
地雷探索装置は飛行維持による電力消費が大きいため、長時間地雷探索作業を維持するためには、無駄な処理を省くことが望ましい。そこで本実施の形態の地雷探索装置は、実施の形態2の地雷探索装置において行われている処理の一部を、車両側で担当することにより省電力を図る構成としている。図13に本実施の形態における地雷探索装置のブロック図を示す。
【0073】
GPSなどで構成される位置検出部において検出された本装置の現在位置を示す位置情報は、無線通信部へ出力される。またレーダーユニットで受信した反射波の受信強度や地面距離検出部で検出された地面との距離に関する情報も、無線通信部へ出力される。これらの情報は、無線通信部より車両に備え付けられた通信端末に送信される。
【0074】
通信端末より送信された信号は無線通信部で受信され、受信された飛行補正信号及び飛行操作情報は飛行制御部へ出力される。
【0075】
飛行制御部は、無線通信部より入力した飛行補正信号、飛行操作情報、及び地面距離検出部より入力した地面との距離に関する情報、障害物検出部より検出された障害物に関する情報に基づいて4つのプロペラに接続された電気モーターの回転数を変更・制御する。
【0076】
図14は本装置の使用者が有するポータブル通信端末であり、地雷探索装置を遠隔地から制御できるリモートコントローラーでもある。
【0077】
当該ポータブル通信端末にはスピーカー401が備え付けられ、警告音を発することにより地雷の存在を使用者に警告する。402は警告ランプであり、地雷の存在を使用者に視覚を通じて警告する。
【0078】
当該端末には画像表示部403を有し、画面に地雷探索装置より検出・出力される反射波の受信状況や、記録部に記録された地図情報に、車両位置や地雷探索装置の位置を多重して表示する。使用者は、目視で観察している地雷探索装置の飛行を制御するために入力部404に備え付けられたレバーを操作して、地雷探索装置の飛行速度や飛行方向を操作する。入力された信号は飛行制御情報として、車両位置情報等などと共にアンテナ405を介して地雷探索装置へ送信される。
【0079】
図15に本ポータブル通信端末のブロック図を示す。
【0080】
移動速度検出部411は車輪の回転数など外部から入力した車両の移動方向及び移動速度を生成し、自動航行制御部412に出力する。移動速度検出部411は位置検出部410から入力した位置情報の差分から移動方向及び移動速度を求める構成であっても良い。
【0081】
位置検出部410はGPS及び加速度計を用いて現在の位置を示す位置情報を生成し、画像表示部403及び自動航行制御部412へ出力する。
【0082】
自動航行制御部412は、上記入力した車両の移動速度及び移動方向に関する情報、車両の位置を示す位置情報、記録部413から入力する飛行予定航路情報に基づいて飛行予定航路情報に示される飛行経路に含まれる位置のうち、現在地雷探索装置が飛行すべき位置を求める。自動航行制御部412は、無線通信部415から入力する位置情報が示す地雷探索装置の現在の位置と上記求めた飛行すべき位置との比較を行い、当該差分を埋めるための飛行補正信号を生成し、無線通信部415へ出力する。なお、当該自動航行制御部412の処理内容は、図11に示す自動航行制御部104の処理内容と同一である。本実施の形態により自動航行制御部で行われていた処理が使用者側が保有する端末内で行われることにより地雷探索装置の消費電力を削減できる。
【0083】
無線通信部415は、自動航行制御部412から入力した飛行補正信号及び入力部404から入力した飛行操作情報を地雷探索装置へ送信する。また、地雷探索装置より送信される地雷探索装置の位置に関する位置情報、地雷探索装置のレーダーユニットによって得られた地雷探索結果である反射波の受信強度や空間分布等の受信状況に関する情報、地面と地雷探索装置との距離に関する情報を受信する。受信した上記位置情報は、自動航行制御部412及び画像表示部403に出力され、受信状況に関する情報は、画像表示部403及び地雷検出部414へ、地面との距離に関する情報は地雷検出部414へそれぞれ出力される。
【0084】
画像表示部403では、無線通信部415から入力した地雷探索結果である受信状況に関する情報を波形で表示したり、記録部413に記録されている地図情報を読み取って、位置検出部より入力される車両の位置情報及び無線通信部415から入力される地雷探索装置の位置を示す位置情報を地図に多重して表示したりする。
【0085】
地雷検出部414は、無線通信部415より入力した地雷探索結果である受信状況に関する情報及び地面との距離に関する情報に基づいて地雷検出を行う。たとえば、反射波の受信状況に地面との距離に関する情報に基づく補正を行った後に受信強度が所定の判定地を上回るかどうかの比較処理を行い、比較結果に基づいて地雷を検出する。地雷が検出された場合、端末に備え付けられたスピーカーからの警告音、警告ランプの点滅等の手段によって使用者に地雷の存在を通知する。
【0086】
システムコントローラ416は、端末全体の制御を行う。
【0087】
上記構成により、電力を消費する複数の処理に関して、使用者側の端末を用いて行うことができるため、地雷探索装置における電力消費を抑え、長時間の飛行が可能となる。
【0088】
なお、本地雷探索装置には前方を撮影するカメラを更に備え、無線通信部より、当該カメラで取得された画像を送信するよう構成しても良い。ポータブル通信端末で当該画像が受信され、画像表示部で表示されることにより、使用者は、装置目線で入力部404を通じて本地雷探索装置を操作できるため、障害物の回避などが用意となる。
【0089】
以上、各実施の形態において説明したように、本装置によれば、独立の駆動する複数のプロペラ及び電動モーターにより飛行制御が行われるため、より安定したホバーリングが可能となり、地雷探索など、地面と一定の距離・一定姿勢を保って移動する必要がある飛行に適している。なお、プロペラ及びモーターの数は4つで説明したが、これに限らず例えば6つ又は8つとして設計しても良い。プロペラ数を増やすことにより、電力消費の観点でデメリットはあるものの、より細かな移動が可能となるため、複雑な地形にも対応できる。また、車両型の無人地雷検出装置では、車両が通過する際に地雷に触れてしまい、装置が破壊されるという問題が生じるが、本装置では飛行しているためそのような問題も生じない。
【0090】
なお、当該装置を飛行型ではなく、車両型にすることでも、安全エリアと危険エリアとを区別して記録するという本願第1の発明に関しては達成することは可能である。すなわち、飛行手段を走行手段に置き換え、複数の車輪と、車輪を駆動させるモーターと、現在の位置を検出する位置検出手段と、予定される飛行経路に関する情報を記録する第1の記録手段と、前記検出された位置及び飛行経路に関する情報から飛行方向を補正する信号を生成する生成手段と、前記生成された信号に基づいて走行方向及び走行速度を制御する制御手段と、走行中に地雷を探索する探索手段と、探索結果を探索した位置と対応付けて記録する第2の記録手段と、を具備する地雷探索装置と構成することで、本願第1の発明に関しては達成することができる。ただし、地雷との接触による装置の破壊される場合がある点、地雷が埋蔵されている複雑な地形への対応ができないという課題、地雷探索速度が飛行型と比べて著しく遅く、安全エリアを確保するスピードに欠けるという欠点は残る。
【0091】
また、上記説明では地雷を検出するレーダユニットは送信した電波の反射波の受信状況から地雷を検出する構成を示したがこれに限るものではなく、赤外線カメラで構成し、地表付近の温度分布を検出し、温度分布の検出結果に基づいて地雷を検出しても良いし、光学カメラで構成し、光学的に得られる画像と予め記録した地雷の形とのマッチング処理を行うことで地雷を検出しても良い。また、これらを組み合わせて地雷を検出しても良い。
【0092】
なお、上記説明では地雷を検出するレーダーユニットと、地面との距離を検出する地面距離検出部を別途設けたが、1つに統合し、レーダーユニットにより得られる反射波の受信状況から地面までの距離を検出するよう構成しても良い。
【0093】
また、地雷検出装置のプロペラ部分を図16に示すようにカバーで覆っても良い。地雷検出を行う地形は草原や山岳地帯も想定され、草や樹木が生えている場所も探索することがあるため、本装置のプロペラ部分がむき出しの状態の場合、草に絡まって走行不能になることがある。そこで、本装置に備え付けられた4つのプロペラであって、プロペラへの気流の供給を可能にしつつ、草木が直接プロペラと接触することを防ぐため、網目状の蓋をプロペラの上下に配置する。すなわち、プロペラの側面をカバーするプラスチックや樹脂で成型された円柱状のサイドカバー501の中空状態の場所にプロペラ502が位置しており、円柱状のサイドカバーの上面と底面を網目状の上面蓋503と底面蓋504で覆うよう構成する。ここのように構成することで、草の覆い茂った場所を低空飛行して地雷探索を行う場合でも、草は底面カバー503によって押し付けられることにより曲げられ、プロペラに絡みつくことがないため、プロペラおよびプロペラと本体をつなぐ接続シャフトを保護することが出来る。
【0094】
なお、上面カバー及び底面カバーは、図17の(1)、(2)に示すように線上のカバーでも良いし、(3)のように同心円状のカバーでも良いし、(4)、(5)のように網目状のカバーであっても良い。地雷探索を行う場所に合わせて網目の細かさや線の間隔が異なるカバーを用いれるよう当該カバーは着脱式であっても良い。当該カバーは軽量アルミホイルや針金、プラスチックなどを成型して製造される。このように空気を通して上面から底面に抜ける気流の流れを発生できるようにした上面の蓋と底面の蓋の中間位置にプロペラを配置し、側面をプラスチックなどの本体フレームで覆うことでプロペラを保護し、草木とプロペラとの接触で飛行不能になることを防ぐことが出来る。
【0095】
なお、上記各実施の形態を組み合わせて本地雷検出装置を構成しても良い。その他、適宜設計変更が可能である。
【産業上の利用可能性】
【0096】
本発明にかかる地雷検出装置は、地雷の検出その他地表のデータ測量など広く利用可能である。
【図面の簡単な説明】
【0097】
【図1】本発明に係る地雷検出装置の概観4面図
【図2】本発明実施の形態1に係る地雷検出装置のブロック図
【図3】地雷情報生成部で作成される地雷情報を表す図
【図4】地雷検出装置の飛行予定経路を示した飛行予定航路情報を示す図
【図5】自動航行制御部による自動航行処理を示すシーケンス図
【図6】飛行制御部による障害物回避プログラムのシーケンス図
【図7】作成された地雷情報を所定の表示プログラムで2次元表示した図
【図8】地雷情報の別の形態を示した図
【図9】地雷情報の別の形態を示した図
【図10】走行する車両と本発明の地雷探索装置の位置関係を示した図
【図11】本発明実施の形態2に係る地雷探索装置のブロック図
【図12】車両及び地雷探索装置の移動予定経路を示した飛行予定航路情報を示す図
【図13】本発明実施の形態3に係る地雷探索装置のブロック図
【図14】本発明実施の形態3に係るポータブル通信端末の概観図
【図15】本発明実施の形態3に係るポータブル通信端末のブロック図
【図16】プロペラ保護用の覆いを被せた本発明の地雷検出装置の概観図
【図17】プロペラ保護用の覆いを表す図
【符号の説明】
【0098】
001,002,003,004 飛行用プロペラ
005 本体ユニット
006 障害物検出部
007 レーダーユニット
008,009,010,011 地面距離検出部
012 バッテリー
013 障害物検出部
101 位置検出部
102 地雷情報生成部
103 記録部
104 自動航行制御部
105 飛行制御部
106 システムコントローラ
107 無線送信部
208 無線通信部
209 地雷検出部
401 スピーカー
402 警告ランプ
403 画像表示部
404 入力部
405 アンテナ
410 位置検出部
411 移動速度検出部
412 自動航行制御部
413 記録部
414 地雷検出部
415 無線通信部
416 システムコントローラ
【特許請求の範囲】
【請求項1】
空中を飛行する飛行手段と、
現在の位置を検出する位置検出手段と、
予定される飛行経路に関する情報を記録する第1の記録手段と、
前記検出された位置及び飛行経路に関する情報から飛行方向を補正する信号を生成する生成手段と、
前記生成された信号に基づいて飛行を制御する制御手段と、
飛行中に地雷を探索する探索手段と、
探索結果を探索した位置と対応付けて記録する第2の記録手段と、
を具備する地雷探索装置。
【請求項2】
前記第2の記録手段は、前記飛行手段によって飛行した位置毎に前記探索手段における探索結果を探索した位置と対応付けて記録する、
請求項1に記載の地雷探索装置。
【請求項3】
前記探索手段は、電磁波を発生する発生手段と、前記発生された電磁波の反射波を受信する受信手段と、から構成される、
請求項1又は請求項2に記載の地雷探索装置。
【請求項4】
前記第2の記録手段は、前記飛行手段によって飛行した位置毎に前記受信手段で受信される反射波の受信強度を前記反射波を受信した位置と対応付けて記録する、
請求項3に記載の地雷探索装置。
【請求項5】
前記探索手段は、前記受信手段で受信された反射波の受信強度に基づいて地雷の有無を判定する判定手段を更に備え、
前記第2の記録手段は、前記飛行した位置毎に前記判定した地雷の有無と前記反射波を受信した位置とを対応付けて記録する、
請求項3又は請求項4に記載の画像記録装置。
【請求項6】
地面までの距離を検出する距離検出手段を更に具備し、
前記制御手段は前記検出された距離に基づいて飛行高度を制御し、
前記第2の記録手段は、前記探索結果と探索した位置における前記距離検出手段において検出された地面までの距離と前記探索した位置とを対応付けて記録する、
請求項1から請求項4に記載の地雷探索装置。
【請求項7】
前記第2の記録手段は、前記探索結果に対して前記検出された距離に基づいて補正を行い、補正後の探索結果と前記探索した位置とを対応付けて記録する、
請求項1から請求項4に記載の地雷探索装置。
【請求項8】
前記判定手段は、反射波の受信強度に前記検出された距離に基づく補正を行い、補正後の受信強度を所定の値と比較することで地雷の有無を判定する、
請求項5に記載の地雷探索装置。
【請求項9】
前記飛行経路に関する情報には、複数の位置が記録され、
前記生成手段は、前記飛行経路に関する情報から選択した一の位置と前記検出された位置とを比較することにより求められる当該2つの位置の差分に基づいて前記飛行方向を補正する信号を生成する、
請求項1に記載の地雷探索装置。
【請求項10】
前記生成手段は、飛行経路に関する情報に含まれる複数の位置について既に通過した位置と未だ通過してない位置とを区別する更新を行う、
請求項9に記載の地雷探索装置。
【請求項11】
障害物を検出する障害物検出手段を更に具備し、
前記制御手段は、障害物検出手段の検出結果に基づいて飛行を制御する、
請求項1に記載の地雷探索装置。
【請求項12】
前記生成手段は、障害物検出手段の検出結果に基づいて複数の位置を含む飛行経路に関する情報から現在の飛行予定位置として選択された一の位置から飛行経路に関する情報に含まれる他の位置を現在の飛行予定位置として再選択する制御を行い、再選択後の位置と前記検出された位置とを比較することにより前記2つの位置の差分に基づいて前記飛行方向を補正する信号を生成する、
請求項11に記載の画像記録装置。
【請求項13】
前記飛行手段は、同一平面状に配置された複数のプロペラが複数の電動モーターにより独立で駆動することを特徴とする請求項1に記載の地雷探索装置。
【請求項14】
前記複数のプロペラは側面を覆う外枠及び外枠の上面を覆う空気を通過させる上面蓋及び外枠の底面を覆う空気を通過させる底面蓋で区切られる中空内部に配置される、
請求項13に記載の地雷探索装置。
【請求項15】
前記地雷検出手段は、地表面の温度分布を検出する赤外線カメラから構成される、
請求項1に記載の地雷探索装置。
【請求項16】
空中を飛行する飛行手段と、
現在の位置を検出する位置検出手段と、
予定される飛行経路に関する情報を無線受信する無線受信手段と、
前記検出された位置及び前記飛行経路に関する情報に基づいて飛行を制御する制御手段と、
飛行中に地雷を探索する探索手段と、
探索結果を探索した位置と対応付けて無線送信する無線送信手段と、
を具備する地雷探索装置。
【請求項17】
空中を飛行する飛行手段を備えた飛行装置を用いた地雷探索方法であって、
予定される飛行経路に関する情報を記録する第1の記録ステップと、
現在の位置を検出する位置検出ステップと、
前記検出された位置及び飛行経路に関する情報から飛行方向を補正する信号を生成する生成ステップと、
前記生成された信号に基づいて飛行を制御する制御ステップと、
飛行中に地雷を探索する探索ステップと、
探索結果を探索した位置と対応付けて記録する第2の記録ステップと、
を具備する地雷探索方法。
【請求項1】
空中を飛行する飛行手段と、
現在の位置を検出する位置検出手段と、
予定される飛行経路に関する情報を記録する第1の記録手段と、
前記検出された位置及び飛行経路に関する情報から飛行方向を補正する信号を生成する生成手段と、
前記生成された信号に基づいて飛行を制御する制御手段と、
飛行中に地雷を探索する探索手段と、
探索結果を探索した位置と対応付けて記録する第2の記録手段と、
を具備する地雷探索装置。
【請求項2】
前記第2の記録手段は、前記飛行手段によって飛行した位置毎に前記探索手段における探索結果を探索した位置と対応付けて記録する、
請求項1に記載の地雷探索装置。
【請求項3】
前記探索手段は、電磁波を発生する発生手段と、前記発生された電磁波の反射波を受信する受信手段と、から構成される、
請求項1又は請求項2に記載の地雷探索装置。
【請求項4】
前記第2の記録手段は、前記飛行手段によって飛行した位置毎に前記受信手段で受信される反射波の受信強度を前記反射波を受信した位置と対応付けて記録する、
請求項3に記載の地雷探索装置。
【請求項5】
前記探索手段は、前記受信手段で受信された反射波の受信強度に基づいて地雷の有無を判定する判定手段を更に備え、
前記第2の記録手段は、前記飛行した位置毎に前記判定した地雷の有無と前記反射波を受信した位置とを対応付けて記録する、
請求項3又は請求項4に記載の画像記録装置。
【請求項6】
地面までの距離を検出する距離検出手段を更に具備し、
前記制御手段は前記検出された距離に基づいて飛行高度を制御し、
前記第2の記録手段は、前記探索結果と探索した位置における前記距離検出手段において検出された地面までの距離と前記探索した位置とを対応付けて記録する、
請求項1から請求項4に記載の地雷探索装置。
【請求項7】
前記第2の記録手段は、前記探索結果に対して前記検出された距離に基づいて補正を行い、補正後の探索結果と前記探索した位置とを対応付けて記録する、
請求項1から請求項4に記載の地雷探索装置。
【請求項8】
前記判定手段は、反射波の受信強度に前記検出された距離に基づく補正を行い、補正後の受信強度を所定の値と比較することで地雷の有無を判定する、
請求項5に記載の地雷探索装置。
【請求項9】
前記飛行経路に関する情報には、複数の位置が記録され、
前記生成手段は、前記飛行経路に関する情報から選択した一の位置と前記検出された位置とを比較することにより求められる当該2つの位置の差分に基づいて前記飛行方向を補正する信号を生成する、
請求項1に記載の地雷探索装置。
【請求項10】
前記生成手段は、飛行経路に関する情報に含まれる複数の位置について既に通過した位置と未だ通過してない位置とを区別する更新を行う、
請求項9に記載の地雷探索装置。
【請求項11】
障害物を検出する障害物検出手段を更に具備し、
前記制御手段は、障害物検出手段の検出結果に基づいて飛行を制御する、
請求項1に記載の地雷探索装置。
【請求項12】
前記生成手段は、障害物検出手段の検出結果に基づいて複数の位置を含む飛行経路に関する情報から現在の飛行予定位置として選択された一の位置から飛行経路に関する情報に含まれる他の位置を現在の飛行予定位置として再選択する制御を行い、再選択後の位置と前記検出された位置とを比較することにより前記2つの位置の差分に基づいて前記飛行方向を補正する信号を生成する、
請求項11に記載の画像記録装置。
【請求項13】
前記飛行手段は、同一平面状に配置された複数のプロペラが複数の電動モーターにより独立で駆動することを特徴とする請求項1に記載の地雷探索装置。
【請求項14】
前記複数のプロペラは側面を覆う外枠及び外枠の上面を覆う空気を通過させる上面蓋及び外枠の底面を覆う空気を通過させる底面蓋で区切られる中空内部に配置される、
請求項13に記載の地雷探索装置。
【請求項15】
前記地雷検出手段は、地表面の温度分布を検出する赤外線カメラから構成される、
請求項1に記載の地雷探索装置。
【請求項16】
空中を飛行する飛行手段と、
現在の位置を検出する位置検出手段と、
予定される飛行経路に関する情報を無線受信する無線受信手段と、
前記検出された位置及び前記飛行経路に関する情報に基づいて飛行を制御する制御手段と、
飛行中に地雷を探索する探索手段と、
探索結果を探索した位置と対応付けて無線送信する無線送信手段と、
を具備する地雷探索装置。
【請求項17】
空中を飛行する飛行手段を備えた飛行装置を用いた地雷探索方法であって、
予定される飛行経路に関する情報を記録する第1の記録ステップと、
現在の位置を検出する位置検出ステップと、
前記検出された位置及び飛行経路に関する情報から飛行方向を補正する信号を生成する生成ステップと、
前記生成された信号に基づいて飛行を制御する制御ステップと、
飛行中に地雷を探索する探索ステップと、
探索結果を探索した位置と対応付けて記録する第2の記録ステップと、
を具備する地雷探索方法。
【図1】



【図2】
【図3】

【図4】

【図5】
【図6】
【図7】

【図8】
【図9】

【図10】

【図11】

【図12】

【図13】
【図14】

【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−37204(P2012−37204A)
【公開日】平成24年2月23日(2012.2.23)
【国際特許分類】
【出願番号】特願2010−180399(P2010−180399)
【出願日】平成22年8月11日(2010.8.11)
【出願人】(707000956)
【Fターム(参考)】
【公開日】平成24年2月23日(2012.2.23)
【国際特許分類】
【出願日】平成22年8月11日(2010.8.11)
【出願人】(707000956)
【Fターム(参考)】
[ Back to top ]