
地震計及び地震計異常監視システム
【課題】検出した振動がノイズか地震かを的確に区別するとともに、地震の検出が遅れる可能性があることを的確に把握可能な地震計、及びこの地震計において地震の検出が遅れる可能性があるか否かを監視する地震計異常監視システムを提供することを目的とする。
【解決手段】地震計は、ノイズレベルを定数倍したものをトリガレベルとし、加速度センサで検出した信号が、このトリガレベルを越えると地震と判定している(S20)ため、ノイズレベルが高くなりすぎると地震の検出に遅れが生じる。そのため、ノイズレベルが一定の閾値を越えているか監視し(S15、S17)、ノイズレベルが所定の閾値を越えたら地震の検出に遅れが生じるものとして、地震計異常監視システムを構成する中央制御装置5に異常報知信号を送信している(S19)。すると、中央制御装置5において地震の検出の遅れが発生する虞がある地震計があることが警報される。
【解決手段】地震計は、ノイズレベルを定数倍したものをトリガレベルとし、加速度センサで検出した信号が、このトリガレベルを越えると地震と判定している(S20)ため、ノイズレベルが高くなりすぎると地震の検出に遅れが生じる。そのため、ノイズレベルが一定の閾値を越えているか監視し(S15、S17)、ノイズレベルが所定の閾値を越えたら地震の検出に遅れが生じるものとして、地震計異常監視システムを構成する中央制御装置5に異常報知信号を送信している(S19)。すると、中央制御装置5において地震の検出の遅れが発生する虞がある地震計があることが警報される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地震計、及び、この地震計の異常を監視する地震計異常監視システムに関する。
【背景技術】
【0002】
従来、地震計では、この地震計が設置される地震観測点において、地震が発生していない時に観測される振動(ノイズ)のノイズレベルを観測し、これに基づいてトリガレベルを決定して、検出された振動がトリガレベルを超えると、地震が発生していると判定していた。
【発明の概要】
【発明が解決しようとする課題】
【0003】
しかし、トリガレベルを高く設定しすぎると地震の検出が遅れ、一方、トリガレベルを低く設定しすぎると、地震観測点の近傍を列車が通過するなどした場合、検出した振動が列車の通過による振動(ノイズ)か地震によるものかを区別できなくなる虞があった。
【0004】
そこで本発明では、検出した振動がノイズか地震かを的確に区別するとともに、地震の検出が遅れる可能性があることを的確に把握可能な地震計、及び、この地震計において地震の検出が遅れる可能性があるか否かを監視する地震計異常監視システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するためになされた請求項1に記載された発明は、地震観測点に設置され、前記地震観測点における振動の加速度を検出する振動検出手段と、該振動検出手段が過去に検出した検出結果と現在検出している検出結果から、地震が発生していないときに前記地震観測点で観測される振動であるノイズの加速度の大きさとして評価可能なノイズレベルを算出するノイズレベル算出手段と、前記ノイズレベルに基づいて、前記振動検出手段で検出された振動の加速度が、地震による振動の加速度かを判定する基準となるトリガレベルを算出するトリガレベル算出手段と、前記振動検出手段で検出された振動の加速度が前記トリガレベルを超えた場合、地震が発生していると判定する地震判定手段と、該地震判定手段により地震が発生したと判定された場合、地震が発生したことを警報する地震警報手段と、前記ノイズレベルが、予め定めた閾値を一定期間継続して超えたか否かを判定する自己診断手段と、該自己診断手段により、前記ノイズレベルが、予め定めた閾値を一定期間継続して超えた場合、異常が発生したものとして警報する異常警報手段とを備えることを特徴とする。
【0006】
これによると、振動検出手段が過去に検出した検出結果と現在検出している検出結果から、地震が発生していないときに地震観測点で観測される振動であるノイズの加速度の大きさとして評価可能なノイズレベルを、ノイズレベル算出手段により算出している。
【0007】
そして、本発明では、この算出されたノイズレベルに基づいて、振動検出手段で検出された振動の加速度が、地震による振動の加速度かを判定する基準となるトリガレベルをトリガレベル算出手段で算出している。
【0008】
そのため、地震観測点の近傍を列車が通過するなどして、ノイズレベルが高くなっても、このノイズレベルに合わせてトリガレベルも上がるので、本発明の地震計を用いれば、検出した振動がノイズか地震かを的確に区別することができる。
【0009】
また、本発明の地震計は、ノイズレベルが、予め定めた閾値を一定期間継続して超えたか否かを判定する自己診断手段を備えており、例えば、閾値として、地震の検出が遅れる可能性がある閾値を設定することにより、その閾値をノイズレベルが一定期間継続して超えた場合、地震計が地震を正確に検出できない異常が発生したものとして、異常警報手段が警報を発する。
【0010】
そのため、本発明の地震計を用いれば、その警報により、地震の検出が遅れる可能性があることを的確に把握することができる。
次に、警報の発し方としては、請求項2に記載したように、閾値として、第1閾値と、この第1閾値よりも大きい第2閾値とを設定し、ノイズレベルが、第1閾値を一定期間継続して超えた後、さらに、第2閾値を一定期間継続して超えた場合に、警報手段により警報を発するようにしてもよい。
【0011】
このようにすると、一つの閾値を超えただけで警報を発する場合に比べて、ノイズレベルが警報を発するレベルに達しているか否かを慎重に判断することができるので、警報の正確性を担保することができる。
【0012】
次に、請求項3に記載したように、トリガレベルは、ノイズレベルを定数倍したものとしてもよい。具体的には、10倍程度に設定されることが多い。
また、前述のトリガレベルの決定方法以外に、トリガレベルを計算式による算出ではなく、値そのものを固定値とする方法がある。
【0013】
次に、請求項4に記載したように、ノイズレベル算出手段は、ノイズレベルを下記の数式により算出するとよい。
【0014】
【数1】

【0015】
この数式のうち(1)式では、(2)式においてt=0のときのノイズレベル初期値を決める式であって、予め定められたサンプリング期間(例えば2秒)内に、予め定められたサンプリング周期毎にノイズをサンプリングすると、サンプリング周期に応じた個数(例えばN個)のノイズをサンプリングできるので、そのサンプリング期間のノイズの平均値を算出している。
【0016】
(2)式は、振動検出手段が過去に検出した検出結果と現在検出している検出結果から、地震が発生していないときに地震観測点で観測される振動であるノイズの加速度の大きさとして評価可能なノイズレベルを算出する式であり、地震観測点において過去にノイズを検出した結果を無視することなく、現在ノイズを検出した結果を取り込みながら、地震観測点の平均的なノイズレベルを算出するものである。
【0017】
この(2)式は、平滑化係数をα(0<α<1)とする指数移動平均を示す式のうち、Robertsの式を用いて示しているが、Hunterの式を用いても良い。
Robertsの式を用いているのは、Hunterの式であると、時刻tのノイズレベルを算出するために、時刻t−1の加速度絶対値を掛ける必要があるため、その記憶・読み出しのための処理時間が必要となるが、この点、Robertsの式を用いると、そのような処理時間が不要となるため、地震観測の迅速性に寄与するからである。
【0018】
尚、αは、0.996〜0.998であることが好ましいが、これに限られるものではない。
次に、請求項5に記載の発明は、上記地震計を用いた地震計異常監視システムについての発明であり、複数の各地震観測点にそれぞれ設置された請求項1〜4のいずれか1項に記載の複数の地震計と、前記複数の地震計と通信し、該複数の地震計を監視する監視装置とを備え、前記監視装置は、いずれかの前記地震計から前記警報に関する異常報知信号を受信すると、該異常報知信号を送信してきた前記地震計に異常が発生していることを報知することを特徴とする。
【0019】
この地震計異常監視システムを用いれば、各地震観測点において、地震が正確に観測できるか否かをセンター装置側で正確に把握することができるので、このシステムを用いれば、各地震計の異常に対する対応を迅速に取ることができる。
【図面の簡単な説明】
【0020】
【図1】本実施形態の地震計のブロック図である。
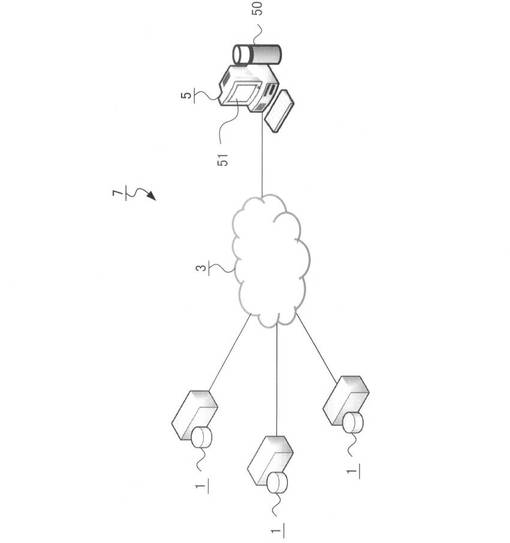
【図2】本実施形態の地震監視システムの模式図である。
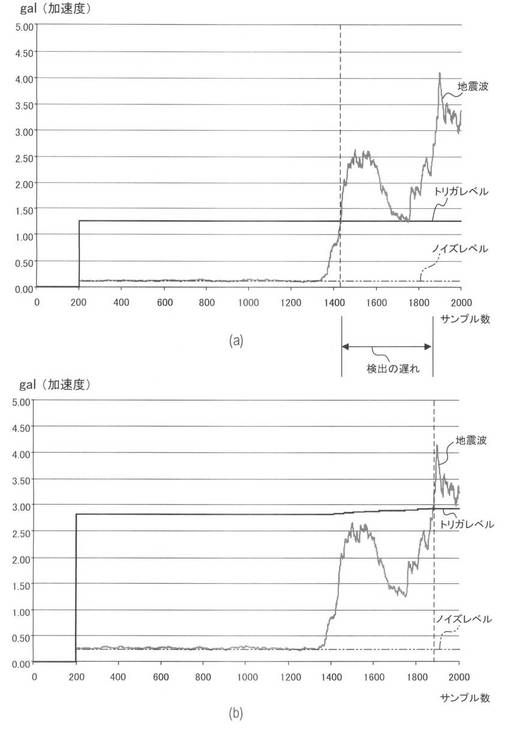
【図3】本実施形態の地震計で算出されるノイズレベルとトリガレベルのサンプル数−加速度グラフで、(a)はノイズレベルが正常時、(b)はノイズレベルが異常時のものである。
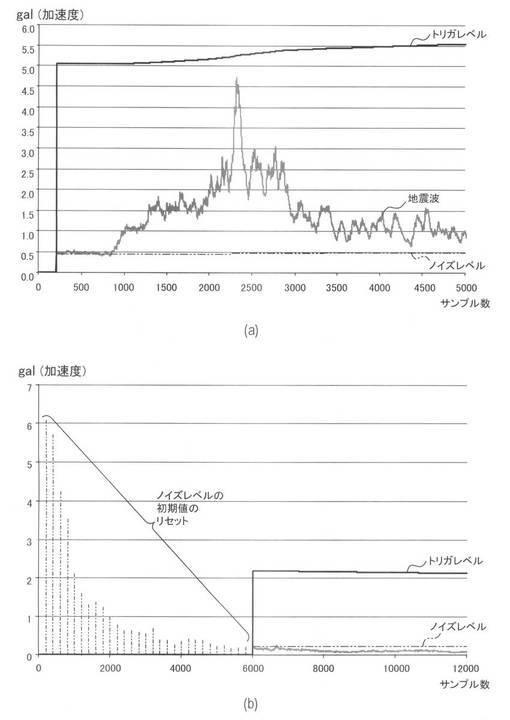
【図4】(a)は本実施形態の地震計で算出されるノイズレベルとトリガレベルのサンプル数−加速度グラフで、ノイズレベルが異常時のものである。(b)はノイズレベルが正常な値になるまでリセットされた様子を示すもので、サンプル数−加速度グラフである。
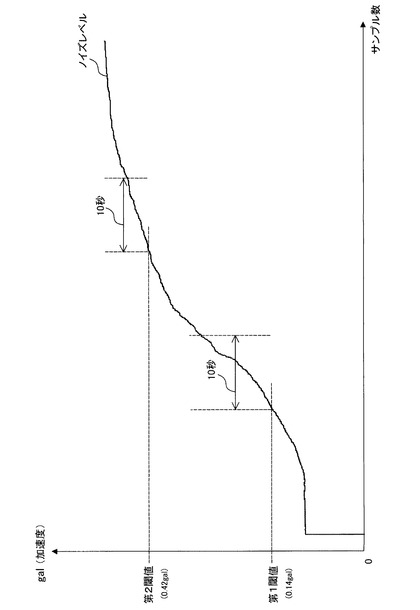
【図5】本実施形態の地震計で算出されるノイズレベルのサンプル数−加速度グラフで、地震観測中にノイズレベルが異常になった様子を示すものである。
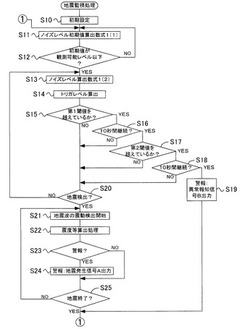
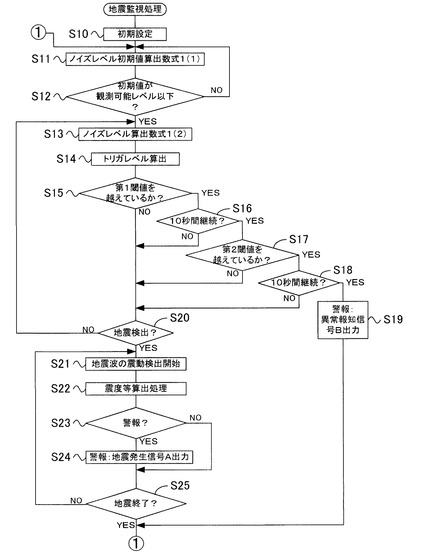
【図6】本実施形態の地震計の地震計処理部で実行される地震監視処理のフローチャートである。
【発明を実施するための形態】
【0021】
以下に本発明の実施形態を図面と共に説明する。
[1.地震計1の構成の説明]
本実施形態の地震計1について説明する。
【0022】
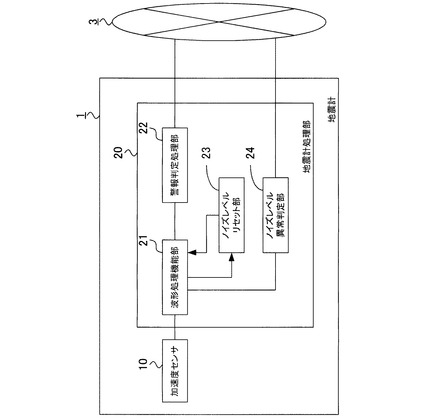
ここで、図1は本実施形態の地震計1のブロック図である。
本実施形態の地震計1は、図1に示すように、この地震計1が設置された地震観測点の振動を検出する加速度センサ10、および、この加速度センサ10を用いて観測した振動の観測結果を処理する地震計処理部20を備える。
【0023】
加速度センサ10は振動の3成分(上下、南北、東西)の加速度を計測し、その計測した加速度値をアナログの信号として地震計処理部20へ出力する。
地震計処理部20は、周知のCPU、ROM、RAM、入出力回路であるI/Oおよびこれらの構成を接続するバスラインなどで構成されて各種処理を実行する。
【0024】
この地震計処理部20は、機能毎にブロックに分けて説明すると、波形処理機能部21と、警報判定処理部22と、ノイズレベルリセット部23と、ノイズレベル異常判定部24とを有する。
【0025】
波形処理機能部21は、加速度センサ10から出力されたアナログ信号をデジタル信号に変換し、このデジタル信号に基づいて後述するノイズレベル、トリガレベルを算出する処理等を実行するブロックである。
【0026】
警報判定処理部22は、波形処理機能部21で算出されたトリガレベルを、加速度センサ10で検出された振動の加速度が越えているか否かにより、地震波による振動を検出したか否かを判定し、地震波による振動を検出したと判定したら、地震波による振動の大きさなどの情報を含む地震発生信号Aを外部の地震警報通信網3を介して後述する中央制御装置5に出力する処理を実行するブロックである。
【0027】
ノイズレベルリセット部23は、波形処理機能部21で算出されたノイズレベルの初期値が適正なものか否かを判定し、ノイズレベルの初期値が適正なものでない場合、その初期値を適正なものに調整する処理を行うブロックである。
【0028】
ノイズレベル異常判定部24は、波形処理機能部21で算出したノイズレベルに異常があった場合、異常があったことを示す異常報知信号Bを外部の地震警報通信網3を介して後述する中央制御装置5に出力する処理を実行するブロックである。
【0029】
尚、ノイズレベルの初期値や、ノイズレベルが適正か否かの判断については後述する。
[2.地震監視システム]
次に、上述した地震計1を用いた地震監視システムについて説明する。
【0030】
ここで、図2は、地震監視システム7の模式図である。
本実施形態の地震監視システム7は、複数の地震観測点のそれぞれに設置された地震計1と、これら地震計1と通信可能な中央制御装置5と、各地震計1と中央制御装置5とを通信可能に接続する地震警報通信網3とを備えている。
【0031】
この地震監視システム7では、地震が発生すると、その地震の地震波による振動を検出した各地震計1から、地震発生信号Aが地震警報通信網3を介して中央制御装置5に送信される。
【0032】
中央制御装置5では、各地震計1から地震発生信号Aを受信すると、この地震発生信号Aに含まれる各地震観測点で観測した地震波による振動の大きさを示す情報等に基づいて、地震の規模や震源その他が算出され、必要に応じて図示しない列車制御システム等に対して地震に関する情報が送信される。
【0033】
また、この地震監視システム7では、各地震計1のノイズレベルに異常があると、その異常を示す異常報知信号Bが、各地震計1のノイズレベル異常判定部24から地震警報通信網3を介して中央制御装置5に送信される。
【0034】
この異常報知信号Bを中央制御装置5が受信すると、中央制御装置5に備えられた警報装置50が点滅して報知を行い、いずれの地震計1でノイズレベルに異常があるかを、中央制御装置5が備えるモニター51に表示する。
【0035】
尚、本発明の地震計異常監視システムは、地震監視システム7のうち、各地震計1から異常報知信号Bを地震警報通信網3を介して中央制御装置5に送信し、警報装置50による警報を実行する部分に相当する。
【0036】
また、本発明の監視装置は、上記実施形態の中央制御装置5に相当する。
[3.波形処理機能部21:ノイズレベル、トリガレベル]
次に、波形処理機能部21で算出されるノイズレベル及びトリガレベルについて説明する。
【0037】
ここで、図3は、ノイズレベル、トリガレベルについて説明するグラフである。
波形処理機能部21(図1参照)は、加速度センサ10(図1参照)で検出された振動の加速度値から、下記の数式1(下記の(1)(2)の式)に基づいて、本実施形態の地震計1が設置された地震観測点でのノイズレベルを算出する処理を実行する。
【0038】
このノイズレベルは、下記の数式1に示すように、加速度センサ10が過去に検出した検出結果と現在検出している検出結果から、地震が発生していないときに各地震観測点で検出される振動であるノイズ(具体的にはノイズの加速度)の平均的な大きさとして評価可能なものである。
【0039】
本実施形態では、100Hzのサンプリング周波数で、地震観測点で観測される振動をサンプリングしている。
そのため、例えば、下記の数式1(1)の式は、数式1(2)でノイズレベルを算出する際のノイズレベルの初期値を算出しているが、本実施形態では、100Hzのサンプリング周波数で2秒間サンプリングすると、N=200個の振動がサンプルされるので、数式1(1)では、このN個のサンプルでノイズレベルの初期値が算出される。
【0040】
【数1】
【0041】
そして、この数式1により波形処理機能部21がノイズレベルが算出されると、このノイズレベルを定数倍(本実施形態では10倍)したトリガレベルが算出される。
すると、これらノイズレベルとトリガレベルは、図3(a)のサンプリング数−加速度のグラフのように観測される。
【0042】
尚、算出されたノイズレベルとトリガレベルは、算出されるごとに地震計処理部20が備えている図示しないRAMに記憶される。そして、ノイズレベルについては以後のノイズレベルの算出に用いられ、トリガレベルについては、地震が発生したか否かを検出する基準値として用いられ、サンプリング周期毎に新しいノイズレベルやトリガレベルが算出されると、それらのデータは更新される。
[4.ノイズレベルリセット部23]
ところで、ノイズレベルの初期値は、地震計1の起動直後に算出されるが、ノイズレベルの初期値を算出する際、偶然の事象によって、観測に適さない非常に大きな値のノイズレベルの初期値が設定されることがある。
【0043】
これは、ノイズレベルの初期値を算出するためのデータを取得しているときに、地震観測点の近傍を列車が通過したり、地震が発生したり、大型車両が通過するなどする場合に発生する。
【0044】
ノイズレベルの初期値が大きすぎると、上述した数式1(2)において、平滑化係数を1に近いものにしているため、ノイズレベルが長期間大きい値を保ったままとなって、図3(b)に示すように、結果としてトリガレベルも長期間高くなる。
【0045】
すると、図3(a)と図3(b)とを比較するとわかるように、地震の地震波の検出に遅れが生じたり、場合によっては、図4(a)に示すように、トリガレベルが地震の加速度よりも大きくなってしまい、地震が検出できなくなるといった障害が発生することが推測される。
【0046】
そこで、本実施形態の地震計1では、ノイズレベルリセット部23を備え、ノイズレベルの初期値が、地震観測に遅れが生じたり、地震観測が出来なくなる虞がない適正な値になるよう調整している。
【0047】
本実施形態では、波形処理機能部21において数式1の(1)で算出されたノイズレベルの初期値が0.14gal以上である場合、ノイズレベルリセット部23は、波形処理機能部21に対しノイズレベルの初期値の算出を再度実行するようリセットを掛け、その後も、ノイズレベルの初期値が0.14gal以上になる場合は、図4(b)に示すように、0.14gal以下となるまで繰り返しリセットが掛けられる。
[5.ノイズレベル異常判定部24]
次に、ノイズレベル異常判定部24について説明する。
【0048】
このノイズレベル異常判定部24は、地震の検出中にノイズレベルに異常があった場合に異常報知信号Bを中央制御装置5に出力する処理を実行する。
より具体的には、ノイズレベル異常判定部24は、ノイズレベルの初期値として適正なものが算出され、数式1(2)によりノイズレベルの算出が実行されているときに、ノイズレベルに異常がないか否かを判定しているブロックである。
【0049】
上述したように、本実施形態の地震計1は、ノイズレベルを定数倍してトリガレベルを決定しているので、ノイズレベルの初期値以外にも、地震観測点の近傍を連続して列車が通過したり、工事が行われるなどして、地震観測中に断続的に大きい振動を連続して観測することによって、図5に示すように、地震観測中にノイズレベルが上昇することがある。
【0050】
このようにノイズレベルが上昇すると、地震観測中に地震の検出に遅れが生じたり(図3参照)、場合によっては、地震観測ができなくなる虞がある(図4(a)参照)。
そのため、本実施形態の地震計1は、ノイズレベル異常判定部24を備え、波形処理機能部21において数式1の(2)で算出されるノイズレベルを監視し、このノイズレベルについて、地震観測に遅れが生じたり、地震観測ができなくなるといった障害が発生する虞がある大きさとなった場合に異常報知信号Bを発している。
【0051】
このノイズレベル異常判定部24は、具体的には、図5に示すように、ノイズレベルが第1閾値(0.14gal)以上になる期間が10秒以上継続した後、さらに、この第1閾値よりも高い第2閾値(0.42gal)以上になる期間が10秒以上継続した場合、異常報知信号Bを地震警報通信網3を介して中央制御装置5に送信している。
【0052】
すると中央制御装置5では、警報装置50が報知を行い、いずれの地震計1でノイズレベルに異常があるかが、中央制御装置5が備えるモニター51に表示される。
このようにすれば、地震を観測できなくなった地震計1を素早く特定することができるので、それに対する対策を素早くとることができ、ノイズレベルの上昇の原因となった事象が取り除くことができるものであれば、これを取り除くことにより、異常報知信号Bを発した地震計1での地震観測が再び可能となる。
[6.警報判定処理部22]
次に、警報判定処理部22について説明する。
【0053】
この警報判定処理部22は、波形処理機能部21で算出された現在のトリガレベルと、加速度センサ10が現在検出している振動の加速度とを比較し、加速度センサ10が検出した振動の加速度が現在のトリガレベルを超えていると判定すると、地震観測点において地震波による振動を検出したものとし、その振動の大きさなどの情報を含む地震発生信号Aを地震警報通信網3を介して中央制御装置5に送信する。
【0054】
中央制御装置5は、各地震計1から地震発生信号Aを受信すると、いずれの地震観測点で、どの程度の大きさの地震波を捉えているかをモニター51に表示する。
そのため、地震が発生したとき、モニター51を見ていれば、どのような規模の地震が、どの範囲で発生したかを瞬時に把握することができる。
[7.地震監視処理]
次に、上記では、地震計1の地震計処理部20で行われる処理について機能ブロックを用いて説明したが、以下では、フローチャートを用いて説明する。
【0055】
ここで、図6は、地震計1の地震計処理部20で実行される地震監視処理のフローチャートである。
この地震監視処理は、図示しない電源ボタンを押下すると開始され、まず、S10において、図示しない地震計処理部20が備えるRAMに記憶されたノイズレベルやトリガレベルに関する情報を消去する等の初期処理が実行される。
【0056】
次に、S11〜S12の処理で、ノイズレベルの初期値を算出する処理が実行される。
S11では、電源オン時から2秒の間に100Hzのサンプリング周波数で、加速度センサ10が観測した振動の加速度の検出結果である200個のサンプリングデータから、ノイズレベルの初期値が、上述の数式1(1)に基づいて算出される。
【0057】
S12では、S11で算出したノイズレベルの初期値が、予め定められた観測可能レベル(0.14gal)以下か否かが判定され、ノイズレベルの初期値が観測可能レベル以下であると、次にS13の処理が実行される(S12:YES)。
【0058】
一方、S11で算出されたノイズレベルの初期値が観測可能レベル以上であると(S12:NO)、再びS11の処理が実行され、新たに2秒間、加速度センサ10を用いてN個の振動の加速度がサンプリングされ、再度S12において、ノイズレベルの初期値が観測可能レベル以下か否かが判定される。
【0059】
このように、この地震監視処理のフローチャートでは、S11〜S12での処理により、ノイズレベルの初期値が観測可能レベル以下となるまで2秒間ずつ繰り返し、ノイズレベルが適正な初期値となるよう算出する処理が実行される。
【0060】
S13が実行されると、数式1の(2)式により、サンプリング周期(100Hz)毎に加速度センサ10で観測された振動の加速度と、ノイズレベル初期値又は過去に算出したノイズレベルとから、現在のノイズレベルを算出する処理が実行される。
【0061】
次に、S14では、S13で算出されたノイズレベルに基づいて、トリガレベルを算出する処理が実行される。このトリガレベルは、ノイズレベルを10倍することにより求められる。そして、次に、S15の処理が実行される。
【0062】
S15では、ノイズレベルが第1閾値(0.14gal)を越えていないかチェックする処理が実行され、第1閾値を越えていない場合(S15:NO)、S20の処理が実行され、第1閾値を越えている場合(S15:YES)、S16で、ノイズレベルが第1閾値を継続して10秒以上越えているか判定する処理が実行される。
【0063】
このS16でノイズレベルが第1閾値を継続して10秒以上越えていると判定されなかった場合(S16:NO)、再びS15の処理が実行され、ノイズレベルが第1閾値を継続して10秒以上越えていると判定された場合(S16:YES)、次に、S17の処理が実行される。
【0064】
S17では、ノイズレベルが第2閾値(0.42gal)を越えていないかチェックする処理が実行され、第2閾値を越えていない場合(S17:NO)、S20の処理が実行され、第2閾値を越えている場合(S17:YES)、S18で、ノイズレベルが第2閾値を継続して10秒以上越えているか判定する処理が実行される。
【0065】
このS18でノイズレベルが第2閾値を継続して10秒以上越えていると判定されなかった場合(S18:NO)、S20の処理が実行され、ノイズレベルが第2閾値を継続して10秒以上越えていると判定された場合(S18:YES)、次に、S19の処理が実行され、異常報知信号Bを中央制御装置5に送信する処理が実行され、本処理を終了する。
【0066】
尚、S19で実行される警報は、ノイズレベルが第1閾値又は第2閾値を下回るまで実行してもよい。
次に、S20では、加速度センサ10で検出した加速度が、トリガレベルを越えるか否かを判定することにより、地震波による振動を加速度センサ10が捉えたか判定する処理が実行される。
【0067】
このS20で地震が検出されなかったら、再びS13以下の処理が実行され、地震が検出されたら、S21の処理が実行される。
S21では、地震計1を地震中状態に移行させ、加速度センサ10で検出される振動を、地震波の振動であるとみなしてサンプリング周期(100Hz)毎に検出する処理が開始される。そして、S22では、現在、加速度センサ10が検出している地震波による振動の大きさから震度等を算出処理がなされる。
【0068】
次に、S23では、S20〜S21で検出・算出された地震が警報を発する必要がある地震か否かを判定する処理が実行される。本実施形態では、S22で算出した震度が警報を出すべき震度として予め設定した震度を越えていないか判定する。
【0069】
S23の処理で、警報を発する必要があると判定された場合(S23:YES)、S24の処理が実行され、このS24では、S22で震度を算出したときに用いた加速度センサ10で検出された振動の大きさや、S22で算出された震度等の情報を含む地震発生信号Aを中央制御装置5に出力する処理が実行され、警報を発する必要がないと判定された場合は(S23:NO)、S25の処理が実行される。
【0070】
S25では、地震が終了したか否かが判定される。この判定は、加速度センサ10が現在検出している振動が、地震終了レベルを下回っているか否かにより判定する。
尚、「地震終了レベル」とは、ノイズレベルを定数倍したレベルであり、ノイズレベルを何倍したものとするかは、地震観測点の特性その他の要件で決定される。
【0071】
このS25で地震が終了したと判定されなかった場合(S25:NO)、再びS22以下の処理が実行され、地震が終了したと判定された場合(S25:YES)、本処理を終了して、S11以下の処理が実行される。
【0072】
尚、以上説明した地震監視処理のうち、上述のS12の処理がノイズレベルリセット部23に相当し、S15〜S19の処理がノイズレベル異常判定部24に相当する。
また、S22〜S24の処理が警報判定処理部22に相当し、S11、S13、S14、S20、S21の処理が波形処理機能部21に相当する。
[上記実施形態の地震計1の特徴]
上記実施形態の地震計1によると、加速度センサ10により過去に検出した検出結果と現在検出している検出結果から、地震が発生していないときに地震観測点で観測される振動であるノイズの加速度の大きさとして評価可能なノイズレベルを、数式1を用いて算出している(S13)。
【0073】
そして、本実施形態では、この算出されたノイズレベルに基づいて、加速度センサ10で検出された振動の加速度が、地震による振動の加速度かを判定する基準となるトリガレベルを算出している(S14)。
【0074】
そのため、本実施形態の地震計1を用いれば、地震観測点の周囲を列車が通過するなどして、ノイズレベルが高くなっても、このノイズレベルに合わせてトリガレベルも上がり、列車の通過等で発生した振動を検出しなくなるので、検出した振動がノイズか地震かを的確に区別することができる。
【0075】
一方、本実施形態の地震計1は、ノイズレベルが、予め定めた閾値を一定期間継続して超えたか否かを自己診断しており(S15、S17)、ノイズレベルが、予め定めた閾値を一定期間継続して超え、例えば、地震の検出が遅れる可能性がある場合など、地震観測が正確に行えない虞があることを警報している(S19)。
【0076】
そのため、本実施形態の地震計1を用いれば、地震の検出が遅れる可能性がある場合、S15〜S19の処理により地震観測が正確に行えない虞があることを警報するので、地震の検出が遅れる可能性があることを的確に把握することができる。
【0077】
また、自己診断(S15、S17)は、ノイズレベルが異常となったか否かを、第1閾値及び、この第1閾値よりも大きい第2閾値の2段階に分けて行っているので、一つの閾値を超えただけで警報を発する場合に比べて、ノイズレベルが異常か否かを慎重に判断することができる。
【0078】
また、本実施形態では、各地震観測点に設置された地震計1でノイズレベルに異常があれば、地震が正確に観測できるか否かを中央制御装置5で正確に把握することができるので、このシステムを用いれば、各地震計1で地震が観測できなくなった場合の対応を迅速に取ることができる。
【0079】
さらに、本実施形態の地震計1は、地震計1をはじめて設置したとき、または、リセットを掛けたときに、ノイズレベルの初期値が異常に高い場合、繰り返しリセットを掛けて、正常となるようにしている。
【0080】
リセットを掛けないと、ノイズレベルが落ち着くまで長期間(本実施形態では例えば3分)かかるが、本実施形態では比較的短い時間で(本実施形態では10秒程度)で落ち着くこととなる。
【0081】
そのため、本実施形態の地震計1は、ノイズレベルが高すぎて長期間地震を検出できなかったり、検出タイミングが遅れることを最小限に抑えることができる。
[対応関係]
特許請求の範囲に記載された振動検出手段は上記実施形態の加速度センサ10に相当し、ノイズレベル算出手段は波形処理機能部21及び地震監視処理中のS13の処理に相当し、トリガレベル算出手段は波形処理機能部21及び地震監視処理中のS14の処理に相当する。
【0082】
特許請求の範囲に記載された地震判定手段は上記実施形態の警報判定処理部22及び地震監視処理中のS20の処理に相当し、地震警報手段は上記実施形態の警報判定処理部22及び地震監視処理中のS24の処理に相当する。
【0083】
特許請求の範囲に記載された自己診断手段は上記実施形態のノイズレベル異常判定部24及び地震監視処理中のS15〜S18の処理に相当し、異常警報手段は上記実施形態のノイズレベル警報判定処理部22及び地震監視処理中のS19の処理に相当する。
【0084】
特許請求の範囲に記載された監視装置は、本実施形態の中央制御装置5に相当する。
以上、請求項の各構成に対応する実施形態上の各構成について説明したが、請求項の各構成に対応する各構成は、上記実施形態のものに限られない。
[その他の実施形態]
上記実施形態では、警報判定処理部22において、地震観測点において地震波による振動が観測された場合、地震発生信号Aを外部の地震警報通信網3に出力する例について説明したが、地震計1に警報装置を設けておき(別体でも一体でもよい)、その警報装置を作動させてもよい。このようにすると、地震があった際、地震計1の側にいた監視員等は、地震があることを素早く知ることができる。
【0085】
ノイズレベル異常判定部24は、波形処理機能部21で算出したノイズレベルに異常があった場合、異常があったことを示す異常報知信号Bを外部の地震警報通信網3に出力する例について説明したが、その異常を報知する報知装置を地震計1に設けておき(別体でも一体でもよい)、その報知装置を作動させてもよい。このようにすると、ノイズレベルに異常があった場合、地震計1の側にいた監視員等は、地震計1の異常を素早く知ることができるので、これに対する対策を素早く取ることができる。
【0086】
また、上記数式1の(2)式は、平滑化係数をα(0<α<1)とする指数移動平均を示す式のうち、Robertsの式を用いて示しているが、Hunterの式を用いても良い。Robertsの式を用いているのは、Hunterの式であると、時刻tのノイズレベルを算出するために、時刻t−1の加速度絶対値を掛ける必要があるため、その記憶・読み出しのための処理時間が必要となるが、この点、Robertsの式を用いると、そのような処理時間が不要となるため、地震観測の迅速性に寄与するからである。
【0087】
αは、0.996〜0.998であることが好ましいが、これに限られるものではない。
また、本発明は、特許請求の範囲に記載された発明の趣旨に合致するものであればよく、上述の実施形態に限定されるものではない。
【符号の説明】
【0088】
1…地震計、3…地震警報通信網、5…中央制御装置、7…地震監視システム、10…加速度センサ、20…地震計処理部、21…波形処理機能部、22…警報判定処理部、23…ノイズレベルリセット部、24…ノイズレベル異常判定部、50…警報装置、51…モニター。
【技術分野】
【0001】
本発明は、地震計、及び、この地震計の異常を監視する地震計異常監視システムに関する。
【背景技術】
【0002】
従来、地震計では、この地震計が設置される地震観測点において、地震が発生していない時に観測される振動(ノイズ)のノイズレベルを観測し、これに基づいてトリガレベルを決定して、検出された振動がトリガレベルを超えると、地震が発生していると判定していた。
【発明の概要】
【発明が解決しようとする課題】
【0003】
しかし、トリガレベルを高く設定しすぎると地震の検出が遅れ、一方、トリガレベルを低く設定しすぎると、地震観測点の近傍を列車が通過するなどした場合、検出した振動が列車の通過による振動(ノイズ)か地震によるものかを区別できなくなる虞があった。
【0004】
そこで本発明では、検出した振動がノイズか地震かを的確に区別するとともに、地震の検出が遅れる可能性があることを的確に把握可能な地震計、及び、この地震計において地震の検出が遅れる可能性があるか否かを監視する地震計異常監視システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するためになされた請求項1に記載された発明は、地震観測点に設置され、前記地震観測点における振動の加速度を検出する振動検出手段と、該振動検出手段が過去に検出した検出結果と現在検出している検出結果から、地震が発生していないときに前記地震観測点で観測される振動であるノイズの加速度の大きさとして評価可能なノイズレベルを算出するノイズレベル算出手段と、前記ノイズレベルに基づいて、前記振動検出手段で検出された振動の加速度が、地震による振動の加速度かを判定する基準となるトリガレベルを算出するトリガレベル算出手段と、前記振動検出手段で検出された振動の加速度が前記トリガレベルを超えた場合、地震が発生していると判定する地震判定手段と、該地震判定手段により地震が発生したと判定された場合、地震が発生したことを警報する地震警報手段と、前記ノイズレベルが、予め定めた閾値を一定期間継続して超えたか否かを判定する自己診断手段と、該自己診断手段により、前記ノイズレベルが、予め定めた閾値を一定期間継続して超えた場合、異常が発生したものとして警報する異常警報手段とを備えることを特徴とする。
【0006】
これによると、振動検出手段が過去に検出した検出結果と現在検出している検出結果から、地震が発生していないときに地震観測点で観測される振動であるノイズの加速度の大きさとして評価可能なノイズレベルを、ノイズレベル算出手段により算出している。
【0007】
そして、本発明では、この算出されたノイズレベルに基づいて、振動検出手段で検出された振動の加速度が、地震による振動の加速度かを判定する基準となるトリガレベルをトリガレベル算出手段で算出している。
【0008】
そのため、地震観測点の近傍を列車が通過するなどして、ノイズレベルが高くなっても、このノイズレベルに合わせてトリガレベルも上がるので、本発明の地震計を用いれば、検出した振動がノイズか地震かを的確に区別することができる。
【0009】
また、本発明の地震計は、ノイズレベルが、予め定めた閾値を一定期間継続して超えたか否かを判定する自己診断手段を備えており、例えば、閾値として、地震の検出が遅れる可能性がある閾値を設定することにより、その閾値をノイズレベルが一定期間継続して超えた場合、地震計が地震を正確に検出できない異常が発生したものとして、異常警報手段が警報を発する。
【0010】
そのため、本発明の地震計を用いれば、その警報により、地震の検出が遅れる可能性があることを的確に把握することができる。
次に、警報の発し方としては、請求項2に記載したように、閾値として、第1閾値と、この第1閾値よりも大きい第2閾値とを設定し、ノイズレベルが、第1閾値を一定期間継続して超えた後、さらに、第2閾値を一定期間継続して超えた場合に、警報手段により警報を発するようにしてもよい。
【0011】
このようにすると、一つの閾値を超えただけで警報を発する場合に比べて、ノイズレベルが警報を発するレベルに達しているか否かを慎重に判断することができるので、警報の正確性を担保することができる。
【0012】
次に、請求項3に記載したように、トリガレベルは、ノイズレベルを定数倍したものとしてもよい。具体的には、10倍程度に設定されることが多い。
また、前述のトリガレベルの決定方法以外に、トリガレベルを計算式による算出ではなく、値そのものを固定値とする方法がある。
【0013】
次に、請求項4に記載したように、ノイズレベル算出手段は、ノイズレベルを下記の数式により算出するとよい。
【0014】
【数1】
【0015】
この数式のうち(1)式では、(2)式においてt=0のときのノイズレベル初期値を決める式であって、予め定められたサンプリング期間(例えば2秒)内に、予め定められたサンプリング周期毎にノイズをサンプリングすると、サンプリング周期に応じた個数(例えばN個)のノイズをサンプリングできるので、そのサンプリング期間のノイズの平均値を算出している。
【0016】
(2)式は、振動検出手段が過去に検出した検出結果と現在検出している検出結果から、地震が発生していないときに地震観測点で観測される振動であるノイズの加速度の大きさとして評価可能なノイズレベルを算出する式であり、地震観測点において過去にノイズを検出した結果を無視することなく、現在ノイズを検出した結果を取り込みながら、地震観測点の平均的なノイズレベルを算出するものである。
【0017】
この(2)式は、平滑化係数をα(0<α<1)とする指数移動平均を示す式のうち、Robertsの式を用いて示しているが、Hunterの式を用いても良い。
Robertsの式を用いているのは、Hunterの式であると、時刻tのノイズレベルを算出するために、時刻t−1の加速度絶対値を掛ける必要があるため、その記憶・読み出しのための処理時間が必要となるが、この点、Robertsの式を用いると、そのような処理時間が不要となるため、地震観測の迅速性に寄与するからである。
【0018】
尚、αは、0.996〜0.998であることが好ましいが、これに限られるものではない。
次に、請求項5に記載の発明は、上記地震計を用いた地震計異常監視システムについての発明であり、複数の各地震観測点にそれぞれ設置された請求項1〜4のいずれか1項に記載の複数の地震計と、前記複数の地震計と通信し、該複数の地震計を監視する監視装置とを備え、前記監視装置は、いずれかの前記地震計から前記警報に関する異常報知信号を受信すると、該異常報知信号を送信してきた前記地震計に異常が発生していることを報知することを特徴とする。
【0019】
この地震計異常監視システムを用いれば、各地震観測点において、地震が正確に観測できるか否かをセンター装置側で正確に把握することができるので、このシステムを用いれば、各地震計の異常に対する対応を迅速に取ることができる。
【図面の簡単な説明】
【0020】
【図1】本実施形態の地震計のブロック図である。
【図2】本実施形態の地震監視システムの模式図である。
【図3】本実施形態の地震計で算出されるノイズレベルとトリガレベルのサンプル数−加速度グラフで、(a)はノイズレベルが正常時、(b)はノイズレベルが異常時のものである。
【図4】(a)は本実施形態の地震計で算出されるノイズレベルとトリガレベルのサンプル数−加速度グラフで、ノイズレベルが異常時のものである。(b)はノイズレベルが正常な値になるまでリセットされた様子を示すもので、サンプル数−加速度グラフである。
【図5】本実施形態の地震計で算出されるノイズレベルのサンプル数−加速度グラフで、地震観測中にノイズレベルが異常になった様子を示すものである。
【図6】本実施形態の地震計の地震計処理部で実行される地震監視処理のフローチャートである。
【発明を実施するための形態】
【0021】
以下に本発明の実施形態を図面と共に説明する。
[1.地震計1の構成の説明]
本実施形態の地震計1について説明する。
【0022】
ここで、図1は本実施形態の地震計1のブロック図である。
本実施形態の地震計1は、図1に示すように、この地震計1が設置された地震観測点の振動を検出する加速度センサ10、および、この加速度センサ10を用いて観測した振動の観測結果を処理する地震計処理部20を備える。
【0023】
加速度センサ10は振動の3成分(上下、南北、東西)の加速度を計測し、その計測した加速度値をアナログの信号として地震計処理部20へ出力する。
地震計処理部20は、周知のCPU、ROM、RAM、入出力回路であるI/Oおよびこれらの構成を接続するバスラインなどで構成されて各種処理を実行する。
【0024】
この地震計処理部20は、機能毎にブロックに分けて説明すると、波形処理機能部21と、警報判定処理部22と、ノイズレベルリセット部23と、ノイズレベル異常判定部24とを有する。
【0025】
波形処理機能部21は、加速度センサ10から出力されたアナログ信号をデジタル信号に変換し、このデジタル信号に基づいて後述するノイズレベル、トリガレベルを算出する処理等を実行するブロックである。
【0026】
警報判定処理部22は、波形処理機能部21で算出されたトリガレベルを、加速度センサ10で検出された振動の加速度が越えているか否かにより、地震波による振動を検出したか否かを判定し、地震波による振動を検出したと判定したら、地震波による振動の大きさなどの情報を含む地震発生信号Aを外部の地震警報通信網3を介して後述する中央制御装置5に出力する処理を実行するブロックである。
【0027】
ノイズレベルリセット部23は、波形処理機能部21で算出されたノイズレベルの初期値が適正なものか否かを判定し、ノイズレベルの初期値が適正なものでない場合、その初期値を適正なものに調整する処理を行うブロックである。
【0028】
ノイズレベル異常判定部24は、波形処理機能部21で算出したノイズレベルに異常があった場合、異常があったことを示す異常報知信号Bを外部の地震警報通信網3を介して後述する中央制御装置5に出力する処理を実行するブロックである。
【0029】
尚、ノイズレベルの初期値や、ノイズレベルが適正か否かの判断については後述する。
[2.地震監視システム]
次に、上述した地震計1を用いた地震監視システムについて説明する。
【0030】
ここで、図2は、地震監視システム7の模式図である。
本実施形態の地震監視システム7は、複数の地震観測点のそれぞれに設置された地震計1と、これら地震計1と通信可能な中央制御装置5と、各地震計1と中央制御装置5とを通信可能に接続する地震警報通信網3とを備えている。
【0031】
この地震監視システム7では、地震が発生すると、その地震の地震波による振動を検出した各地震計1から、地震発生信号Aが地震警報通信網3を介して中央制御装置5に送信される。
【0032】
中央制御装置5では、各地震計1から地震発生信号Aを受信すると、この地震発生信号Aに含まれる各地震観測点で観測した地震波による振動の大きさを示す情報等に基づいて、地震の規模や震源その他が算出され、必要に応じて図示しない列車制御システム等に対して地震に関する情報が送信される。
【0033】
また、この地震監視システム7では、各地震計1のノイズレベルに異常があると、その異常を示す異常報知信号Bが、各地震計1のノイズレベル異常判定部24から地震警報通信網3を介して中央制御装置5に送信される。
【0034】
この異常報知信号Bを中央制御装置5が受信すると、中央制御装置5に備えられた警報装置50が点滅して報知を行い、いずれの地震計1でノイズレベルに異常があるかを、中央制御装置5が備えるモニター51に表示する。
【0035】
尚、本発明の地震計異常監視システムは、地震監視システム7のうち、各地震計1から異常報知信号Bを地震警報通信網3を介して中央制御装置5に送信し、警報装置50による警報を実行する部分に相当する。
【0036】
また、本発明の監視装置は、上記実施形態の中央制御装置5に相当する。
[3.波形処理機能部21:ノイズレベル、トリガレベル]
次に、波形処理機能部21で算出されるノイズレベル及びトリガレベルについて説明する。
【0037】
ここで、図3は、ノイズレベル、トリガレベルについて説明するグラフである。
波形処理機能部21(図1参照)は、加速度センサ10(図1参照)で検出された振動の加速度値から、下記の数式1(下記の(1)(2)の式)に基づいて、本実施形態の地震計1が設置された地震観測点でのノイズレベルを算出する処理を実行する。
【0038】
このノイズレベルは、下記の数式1に示すように、加速度センサ10が過去に検出した検出結果と現在検出している検出結果から、地震が発生していないときに各地震観測点で検出される振動であるノイズ(具体的にはノイズの加速度)の平均的な大きさとして評価可能なものである。
【0039】
本実施形態では、100Hzのサンプリング周波数で、地震観測点で観測される振動をサンプリングしている。
そのため、例えば、下記の数式1(1)の式は、数式1(2)でノイズレベルを算出する際のノイズレベルの初期値を算出しているが、本実施形態では、100Hzのサンプリング周波数で2秒間サンプリングすると、N=200個の振動がサンプルされるので、数式1(1)では、このN個のサンプルでノイズレベルの初期値が算出される。
【0040】
【数1】
【0041】
そして、この数式1により波形処理機能部21がノイズレベルが算出されると、このノイズレベルを定数倍(本実施形態では10倍)したトリガレベルが算出される。
すると、これらノイズレベルとトリガレベルは、図3(a)のサンプリング数−加速度のグラフのように観測される。
【0042】
尚、算出されたノイズレベルとトリガレベルは、算出されるごとに地震計処理部20が備えている図示しないRAMに記憶される。そして、ノイズレベルについては以後のノイズレベルの算出に用いられ、トリガレベルについては、地震が発生したか否かを検出する基準値として用いられ、サンプリング周期毎に新しいノイズレベルやトリガレベルが算出されると、それらのデータは更新される。
[4.ノイズレベルリセット部23]
ところで、ノイズレベルの初期値は、地震計1の起動直後に算出されるが、ノイズレベルの初期値を算出する際、偶然の事象によって、観測に適さない非常に大きな値のノイズレベルの初期値が設定されることがある。
【0043】
これは、ノイズレベルの初期値を算出するためのデータを取得しているときに、地震観測点の近傍を列車が通過したり、地震が発生したり、大型車両が通過するなどする場合に発生する。
【0044】
ノイズレベルの初期値が大きすぎると、上述した数式1(2)において、平滑化係数を1に近いものにしているため、ノイズレベルが長期間大きい値を保ったままとなって、図3(b)に示すように、結果としてトリガレベルも長期間高くなる。
【0045】
すると、図3(a)と図3(b)とを比較するとわかるように、地震の地震波の検出に遅れが生じたり、場合によっては、図4(a)に示すように、トリガレベルが地震の加速度よりも大きくなってしまい、地震が検出できなくなるといった障害が発生することが推測される。
【0046】
そこで、本実施形態の地震計1では、ノイズレベルリセット部23を備え、ノイズレベルの初期値が、地震観測に遅れが生じたり、地震観測が出来なくなる虞がない適正な値になるよう調整している。
【0047】
本実施形態では、波形処理機能部21において数式1の(1)で算出されたノイズレベルの初期値が0.14gal以上である場合、ノイズレベルリセット部23は、波形処理機能部21に対しノイズレベルの初期値の算出を再度実行するようリセットを掛け、その後も、ノイズレベルの初期値が0.14gal以上になる場合は、図4(b)に示すように、0.14gal以下となるまで繰り返しリセットが掛けられる。
[5.ノイズレベル異常判定部24]
次に、ノイズレベル異常判定部24について説明する。
【0048】
このノイズレベル異常判定部24は、地震の検出中にノイズレベルに異常があった場合に異常報知信号Bを中央制御装置5に出力する処理を実行する。
より具体的には、ノイズレベル異常判定部24は、ノイズレベルの初期値として適正なものが算出され、数式1(2)によりノイズレベルの算出が実行されているときに、ノイズレベルに異常がないか否かを判定しているブロックである。
【0049】
上述したように、本実施形態の地震計1は、ノイズレベルを定数倍してトリガレベルを決定しているので、ノイズレベルの初期値以外にも、地震観測点の近傍を連続して列車が通過したり、工事が行われるなどして、地震観測中に断続的に大きい振動を連続して観測することによって、図5に示すように、地震観測中にノイズレベルが上昇することがある。
【0050】
このようにノイズレベルが上昇すると、地震観測中に地震の検出に遅れが生じたり(図3参照)、場合によっては、地震観測ができなくなる虞がある(図4(a)参照)。
そのため、本実施形態の地震計1は、ノイズレベル異常判定部24を備え、波形処理機能部21において数式1の(2)で算出されるノイズレベルを監視し、このノイズレベルについて、地震観測に遅れが生じたり、地震観測ができなくなるといった障害が発生する虞がある大きさとなった場合に異常報知信号Bを発している。
【0051】
このノイズレベル異常判定部24は、具体的には、図5に示すように、ノイズレベルが第1閾値(0.14gal)以上になる期間が10秒以上継続した後、さらに、この第1閾値よりも高い第2閾値(0.42gal)以上になる期間が10秒以上継続した場合、異常報知信号Bを地震警報通信網3を介して中央制御装置5に送信している。
【0052】
すると中央制御装置5では、警報装置50が報知を行い、いずれの地震計1でノイズレベルに異常があるかが、中央制御装置5が備えるモニター51に表示される。
このようにすれば、地震を観測できなくなった地震計1を素早く特定することができるので、それに対する対策を素早くとることができ、ノイズレベルの上昇の原因となった事象が取り除くことができるものであれば、これを取り除くことにより、異常報知信号Bを発した地震計1での地震観測が再び可能となる。
[6.警報判定処理部22]
次に、警報判定処理部22について説明する。
【0053】
この警報判定処理部22は、波形処理機能部21で算出された現在のトリガレベルと、加速度センサ10が現在検出している振動の加速度とを比較し、加速度センサ10が検出した振動の加速度が現在のトリガレベルを超えていると判定すると、地震観測点において地震波による振動を検出したものとし、その振動の大きさなどの情報を含む地震発生信号Aを地震警報通信網3を介して中央制御装置5に送信する。
【0054】
中央制御装置5は、各地震計1から地震発生信号Aを受信すると、いずれの地震観測点で、どの程度の大きさの地震波を捉えているかをモニター51に表示する。
そのため、地震が発生したとき、モニター51を見ていれば、どのような規模の地震が、どの範囲で発生したかを瞬時に把握することができる。
[7.地震監視処理]
次に、上記では、地震計1の地震計処理部20で行われる処理について機能ブロックを用いて説明したが、以下では、フローチャートを用いて説明する。
【0055】
ここで、図6は、地震計1の地震計処理部20で実行される地震監視処理のフローチャートである。
この地震監視処理は、図示しない電源ボタンを押下すると開始され、まず、S10において、図示しない地震計処理部20が備えるRAMに記憶されたノイズレベルやトリガレベルに関する情報を消去する等の初期処理が実行される。
【0056】
次に、S11〜S12の処理で、ノイズレベルの初期値を算出する処理が実行される。
S11では、電源オン時から2秒の間に100Hzのサンプリング周波数で、加速度センサ10が観測した振動の加速度の検出結果である200個のサンプリングデータから、ノイズレベルの初期値が、上述の数式1(1)に基づいて算出される。
【0057】
S12では、S11で算出したノイズレベルの初期値が、予め定められた観測可能レベル(0.14gal)以下か否かが判定され、ノイズレベルの初期値が観測可能レベル以下であると、次にS13の処理が実行される(S12:YES)。
【0058】
一方、S11で算出されたノイズレベルの初期値が観測可能レベル以上であると(S12:NO)、再びS11の処理が実行され、新たに2秒間、加速度センサ10を用いてN個の振動の加速度がサンプリングされ、再度S12において、ノイズレベルの初期値が観測可能レベル以下か否かが判定される。
【0059】
このように、この地震監視処理のフローチャートでは、S11〜S12での処理により、ノイズレベルの初期値が観測可能レベル以下となるまで2秒間ずつ繰り返し、ノイズレベルが適正な初期値となるよう算出する処理が実行される。
【0060】
S13が実行されると、数式1の(2)式により、サンプリング周期(100Hz)毎に加速度センサ10で観測された振動の加速度と、ノイズレベル初期値又は過去に算出したノイズレベルとから、現在のノイズレベルを算出する処理が実行される。
【0061】
次に、S14では、S13で算出されたノイズレベルに基づいて、トリガレベルを算出する処理が実行される。このトリガレベルは、ノイズレベルを10倍することにより求められる。そして、次に、S15の処理が実行される。
【0062】
S15では、ノイズレベルが第1閾値(0.14gal)を越えていないかチェックする処理が実行され、第1閾値を越えていない場合(S15:NO)、S20の処理が実行され、第1閾値を越えている場合(S15:YES)、S16で、ノイズレベルが第1閾値を継続して10秒以上越えているか判定する処理が実行される。
【0063】
このS16でノイズレベルが第1閾値を継続して10秒以上越えていると判定されなかった場合(S16:NO)、再びS15の処理が実行され、ノイズレベルが第1閾値を継続して10秒以上越えていると判定された場合(S16:YES)、次に、S17の処理が実行される。
【0064】
S17では、ノイズレベルが第2閾値(0.42gal)を越えていないかチェックする処理が実行され、第2閾値を越えていない場合(S17:NO)、S20の処理が実行され、第2閾値を越えている場合(S17:YES)、S18で、ノイズレベルが第2閾値を継続して10秒以上越えているか判定する処理が実行される。
【0065】
このS18でノイズレベルが第2閾値を継続して10秒以上越えていると判定されなかった場合(S18:NO)、S20の処理が実行され、ノイズレベルが第2閾値を継続して10秒以上越えていると判定された場合(S18:YES)、次に、S19の処理が実行され、異常報知信号Bを中央制御装置5に送信する処理が実行され、本処理を終了する。
【0066】
尚、S19で実行される警報は、ノイズレベルが第1閾値又は第2閾値を下回るまで実行してもよい。
次に、S20では、加速度センサ10で検出した加速度が、トリガレベルを越えるか否かを判定することにより、地震波による振動を加速度センサ10が捉えたか判定する処理が実行される。
【0067】
このS20で地震が検出されなかったら、再びS13以下の処理が実行され、地震が検出されたら、S21の処理が実行される。
S21では、地震計1を地震中状態に移行させ、加速度センサ10で検出される振動を、地震波の振動であるとみなしてサンプリング周期(100Hz)毎に検出する処理が開始される。そして、S22では、現在、加速度センサ10が検出している地震波による振動の大きさから震度等を算出処理がなされる。
【0068】
次に、S23では、S20〜S21で検出・算出された地震が警報を発する必要がある地震か否かを判定する処理が実行される。本実施形態では、S22で算出した震度が警報を出すべき震度として予め設定した震度を越えていないか判定する。
【0069】
S23の処理で、警報を発する必要があると判定された場合(S23:YES)、S24の処理が実行され、このS24では、S22で震度を算出したときに用いた加速度センサ10で検出された振動の大きさや、S22で算出された震度等の情報を含む地震発生信号Aを中央制御装置5に出力する処理が実行され、警報を発する必要がないと判定された場合は(S23:NO)、S25の処理が実行される。
【0070】
S25では、地震が終了したか否かが判定される。この判定は、加速度センサ10が現在検出している振動が、地震終了レベルを下回っているか否かにより判定する。
尚、「地震終了レベル」とは、ノイズレベルを定数倍したレベルであり、ノイズレベルを何倍したものとするかは、地震観測点の特性その他の要件で決定される。
【0071】
このS25で地震が終了したと判定されなかった場合(S25:NO)、再びS22以下の処理が実行され、地震が終了したと判定された場合(S25:YES)、本処理を終了して、S11以下の処理が実行される。
【0072】
尚、以上説明した地震監視処理のうち、上述のS12の処理がノイズレベルリセット部23に相当し、S15〜S19の処理がノイズレベル異常判定部24に相当する。
また、S22〜S24の処理が警報判定処理部22に相当し、S11、S13、S14、S20、S21の処理が波形処理機能部21に相当する。
[上記実施形態の地震計1の特徴]
上記実施形態の地震計1によると、加速度センサ10により過去に検出した検出結果と現在検出している検出結果から、地震が発生していないときに地震観測点で観測される振動であるノイズの加速度の大きさとして評価可能なノイズレベルを、数式1を用いて算出している(S13)。
【0073】
そして、本実施形態では、この算出されたノイズレベルに基づいて、加速度センサ10で検出された振動の加速度が、地震による振動の加速度かを判定する基準となるトリガレベルを算出している(S14)。
【0074】
そのため、本実施形態の地震計1を用いれば、地震観測点の周囲を列車が通過するなどして、ノイズレベルが高くなっても、このノイズレベルに合わせてトリガレベルも上がり、列車の通過等で発生した振動を検出しなくなるので、検出した振動がノイズか地震かを的確に区別することができる。
【0075】
一方、本実施形態の地震計1は、ノイズレベルが、予め定めた閾値を一定期間継続して超えたか否かを自己診断しており(S15、S17)、ノイズレベルが、予め定めた閾値を一定期間継続して超え、例えば、地震の検出が遅れる可能性がある場合など、地震観測が正確に行えない虞があることを警報している(S19)。
【0076】
そのため、本実施形態の地震計1を用いれば、地震の検出が遅れる可能性がある場合、S15〜S19の処理により地震観測が正確に行えない虞があることを警報するので、地震の検出が遅れる可能性があることを的確に把握することができる。
【0077】
また、自己診断(S15、S17)は、ノイズレベルが異常となったか否かを、第1閾値及び、この第1閾値よりも大きい第2閾値の2段階に分けて行っているので、一つの閾値を超えただけで警報を発する場合に比べて、ノイズレベルが異常か否かを慎重に判断することができる。
【0078】
また、本実施形態では、各地震観測点に設置された地震計1でノイズレベルに異常があれば、地震が正確に観測できるか否かを中央制御装置5で正確に把握することができるので、このシステムを用いれば、各地震計1で地震が観測できなくなった場合の対応を迅速に取ることができる。
【0079】
さらに、本実施形態の地震計1は、地震計1をはじめて設置したとき、または、リセットを掛けたときに、ノイズレベルの初期値が異常に高い場合、繰り返しリセットを掛けて、正常となるようにしている。
【0080】
リセットを掛けないと、ノイズレベルが落ち着くまで長期間(本実施形態では例えば3分)かかるが、本実施形態では比較的短い時間で(本実施形態では10秒程度)で落ち着くこととなる。
【0081】
そのため、本実施形態の地震計1は、ノイズレベルが高すぎて長期間地震を検出できなかったり、検出タイミングが遅れることを最小限に抑えることができる。
[対応関係]
特許請求の範囲に記載された振動検出手段は上記実施形態の加速度センサ10に相当し、ノイズレベル算出手段は波形処理機能部21及び地震監視処理中のS13の処理に相当し、トリガレベル算出手段は波形処理機能部21及び地震監視処理中のS14の処理に相当する。
【0082】
特許請求の範囲に記載された地震判定手段は上記実施形態の警報判定処理部22及び地震監視処理中のS20の処理に相当し、地震警報手段は上記実施形態の警報判定処理部22及び地震監視処理中のS24の処理に相当する。
【0083】
特許請求の範囲に記載された自己診断手段は上記実施形態のノイズレベル異常判定部24及び地震監視処理中のS15〜S18の処理に相当し、異常警報手段は上記実施形態のノイズレベル警報判定処理部22及び地震監視処理中のS19の処理に相当する。
【0084】
特許請求の範囲に記載された監視装置は、本実施形態の中央制御装置5に相当する。
以上、請求項の各構成に対応する実施形態上の各構成について説明したが、請求項の各構成に対応する各構成は、上記実施形態のものに限られない。
[その他の実施形態]
上記実施形態では、警報判定処理部22において、地震観測点において地震波による振動が観測された場合、地震発生信号Aを外部の地震警報通信網3に出力する例について説明したが、地震計1に警報装置を設けておき(別体でも一体でもよい)、その警報装置を作動させてもよい。このようにすると、地震があった際、地震計1の側にいた監視員等は、地震があることを素早く知ることができる。
【0085】
ノイズレベル異常判定部24は、波形処理機能部21で算出したノイズレベルに異常があった場合、異常があったことを示す異常報知信号Bを外部の地震警報通信網3に出力する例について説明したが、その異常を報知する報知装置を地震計1に設けておき(別体でも一体でもよい)、その報知装置を作動させてもよい。このようにすると、ノイズレベルに異常があった場合、地震計1の側にいた監視員等は、地震計1の異常を素早く知ることができるので、これに対する対策を素早く取ることができる。
【0086】
また、上記数式1の(2)式は、平滑化係数をα(0<α<1)とする指数移動平均を示す式のうち、Robertsの式を用いて示しているが、Hunterの式を用いても良い。Robertsの式を用いているのは、Hunterの式であると、時刻tのノイズレベルを算出するために、時刻t−1の加速度絶対値を掛ける必要があるため、その記憶・読み出しのための処理時間が必要となるが、この点、Robertsの式を用いると、そのような処理時間が不要となるため、地震観測の迅速性に寄与するからである。
【0087】
αは、0.996〜0.998であることが好ましいが、これに限られるものではない。
また、本発明は、特許請求の範囲に記載された発明の趣旨に合致するものであればよく、上述の実施形態に限定されるものではない。
【符号の説明】
【0088】
1…地震計、3…地震警報通信網、5…中央制御装置、7…地震監視システム、10…加速度センサ、20…地震計処理部、21…波形処理機能部、22…警報判定処理部、23…ノイズレベルリセット部、24…ノイズレベル異常判定部、50…警報装置、51…モニター。
【特許請求の範囲】
【請求項1】
地震観測点に設置され、前記地震観測点における振動の加速度を検出する振動検出手段と、
該振動検出手段が過去に検出した検出結果と現在検出している検出結果から、地震が発生していないときに前記地震観測点で観測される振動であるノイズの加速度の大きさとして評価可能なノイズレベルを算出するノイズレベル算出手段と、
前記ノイズレベルに基づいて、前記振動検出手段で検出された振動の加速度が、地震による振動の加速度かを判定する基準となるトリガレベルを算出するトリガレベル算出手段と、
前記振動検出手段で検出された振動の加速度が前記トリガレベルを超えた場合、地震が発生していると判定する地震判定手段と、
該地震判定手段により地震が発生したと判定された場合、地震が発生したことを警報する地震警報手段と、
前記ノイズレベルが、予め定めた閾値を一定期間継続して超えたか否かを判定する自己診断手段と、
該自己診断手段により、前記ノイズレベルが、予め定めた閾値を一定期間継続して超えた場合、異常が発生したものとして警報する異常警報手段と
を備えることを特徴とする地震計。
【請求項2】
請求項1に記載の地震計において、
前記閾値として、第1閾値と、該第1閾値よりも大きい第2閾値とがあり、
前記警報手段は、
前記ノイズレベルが、前記第1閾値を一定期間継続して超えた後、さらに、前記第2閾値を一定期間継続して超えた場合、警報を行うことを特徴とする地震計。
【請求項3】
請求項1,2のいずれか1項に記載の地震計において、
前記トリガレベルは、前記ノイズレベルを定数倍したものであることを特徴とする地震計。
【請求項4】
請求項1〜3のいずれか1項に記載の地震計において、
前記ノイズレベル算出手段は、
前記ノイズレベルを下記の数式により算出することを特徴とする地震計。
【数1】
【請求項5】
複数の各地震観測点にそれぞれ設置された請求項1〜4のいずれか1項に記載の複数の地震計と、
前記複数の地震計と通信し、該複数の地震計を監視する監視装置と
を備え、
前記監視装置は、
いずれかの前記地震計から前記警報に関する異常報知信号を受信すると、該異常報知信号を送信してきた前記地震計に異常が発生していることを報知する
ことを特徴とする地震計異常監視システム。
【請求項1】
地震観測点に設置され、前記地震観測点における振動の加速度を検出する振動検出手段と、
該振動検出手段が過去に検出した検出結果と現在検出している検出結果から、地震が発生していないときに前記地震観測点で観測される振動であるノイズの加速度の大きさとして評価可能なノイズレベルを算出するノイズレベル算出手段と、
前記ノイズレベルに基づいて、前記振動検出手段で検出された振動の加速度が、地震による振動の加速度かを判定する基準となるトリガレベルを算出するトリガレベル算出手段と、
前記振動検出手段で検出された振動の加速度が前記トリガレベルを超えた場合、地震が発生していると判定する地震判定手段と、
該地震判定手段により地震が発生したと判定された場合、地震が発生したことを警報する地震警報手段と、
前記ノイズレベルが、予め定めた閾値を一定期間継続して超えたか否かを判定する自己診断手段と、
該自己診断手段により、前記ノイズレベルが、予め定めた閾値を一定期間継続して超えた場合、異常が発生したものとして警報する異常警報手段と
を備えることを特徴とする地震計。
【請求項2】
請求項1に記載の地震計において、
前記閾値として、第1閾値と、該第1閾値よりも大きい第2閾値とがあり、
前記警報手段は、
前記ノイズレベルが、前記第1閾値を一定期間継続して超えた後、さらに、前記第2閾値を一定期間継続して超えた場合、警報を行うことを特徴とする地震計。
【請求項3】
請求項1,2のいずれか1項に記載の地震計において、
前記トリガレベルは、前記ノイズレベルを定数倍したものであることを特徴とする地震計。
【請求項4】
請求項1〜3のいずれか1項に記載の地震計において、
前記ノイズレベル算出手段は、
前記ノイズレベルを下記の数式により算出することを特徴とする地震計。
【数1】
【請求項5】
複数の各地震観測点にそれぞれ設置された請求項1〜4のいずれか1項に記載の複数の地震計と、
前記複数の地震計と通信し、該複数の地震計を監視する監視装置と
を備え、
前記監視装置は、
いずれかの前記地震計から前記警報に関する異常報知信号を受信すると、該異常報知信号を送信してきた前記地震計に異常が発生していることを報知する
ことを特徴とする地震計異常監視システム。
【図1】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【公開番号】特開2013−108847(P2013−108847A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254149(P2011−254149)
【出願日】平成23年11月21日(2011.11.21)
【出願人】(390021577)東海旅客鉄道株式会社 (413)
【出願人】(591102095)三菱スペース・ソフトウエア株式会社 (148)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月21日(2011.11.21)
【出願人】(390021577)東海旅客鉄道株式会社 (413)
【出願人】(591102095)三菱スペース・ソフトウエア株式会社 (148)
[ Back to top ]