
坂道の傾斜角度の自動計算プロセス、およびこのプロセスを実行する装置
【課題】坂道に至る前に、車両の走行に係るパラメータ(前照灯の向きやエンジンの燃料消費量)を調整するための前提となる傾斜角度を自動的に計算するプロセスを提供する。
【解決手段】
カメラ201を搭載した車両200が接近している坂道204上の対象地点までの傾斜角度θの自動計算プロセスであって、
−道路203の画像において、近傍の道路の両側に位置する第1の参照マークを検知する過程と、
−遠方の道路の両側に位置する第2の参照マークを検知する過程と、
−画像処理システムを用いて、第1の参照マークが延びる方向と、第2の参照マークが延びる方向との変化を検出する過程と、
−変化が検出されたときに、坂道204の存在を認識し、かつ変化の大きさから、第2の対象地点P2までの傾斜角度θを算出する過程とを含むようにする。
【解決手段】
カメラ201を搭載した車両200が接近している坂道204上の対象地点までの傾斜角度θの自動計算プロセスであって、
−道路203の画像において、近傍の道路の両側に位置する第1の参照マークを検知する過程と、
−遠方の道路の両側に位置する第2の参照マークを検知する過程と、
−画像処理システムを用いて、第1の参照マークが延びる方向と、第2の参照マークが延びる方向との変化を検出する過程と、
−変化が検出されたときに、坂道204の存在を認識し、かつ変化の大きさから、第2の対象地点P2までの傾斜角度θを算出する過程とを含むようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、坂道の傾斜角度の自動計算プロセスに関する。また、本発明は、この自動計算プロセスを実行しうる装置にも関する。
【0002】
本発明に係る自動計算プロセスによれば、上り坂であるか下り坂であるかに拘らず、傾斜角度を計算することにより、車両が坂道に差し掛かることを予測し、坂道に至るまでの走行パラメータを最適なものにして、坂道への接近を容易にすることができる。上述のパラメータには、エンジンの回転速度や、前照灯の向き等が含まれる。
【0003】
本発明は、高度運転支援システムの技術分野に属する。この分野に属する装置としては、障害物探知装置、暗視装置、カーブに接近したときの運転者警告装置、運転条件に応じて前照灯の向きや光度を最適にするための装置等が知られている。これらの装置は、みな、何らかのセンサを利用している。一方、上述の装置によって導き出される結果は、概ね、レーダー、ライダー(lidar)、超音波等の技術に基づいており、相対的に車両に低速度で接近する障害物も検知することができる。また、上記の結果は、カメラ等を用いるプロセスにも基づいている。
【背景技術】
【0004】
一般に遠隔的な検知(例えばACC(Autonomous Cruise Control;自律走行制御)システム)に用いられるレーダーやライダーのようなセンサは、路上における対象物の位置や、2次元的な速度に関する直接的な情報を提供する。この情報には、対象物の分類や、この対象物についての有益な情報(2次元座標上の位置や、センサを装備している車両または固定参照点(車両の位置がこの参照点に対して定められるようになっている場合)に対する相対的な速度等)が含まれる。
【0005】
しかし、上述のセンサにおける観測角度は広くないため、対象物の位置の角度についての情報は正確ではない。さらに、これらのセンサは、車両がどの車線を走行しているか、車線の数、道路の曲線形状、観測角度範囲外の障害物の分類、道路標識その他の道路基盤データ等、道路環境に関する情報を提供することができない。
【0006】
したがって、多くの運転支援装置は、センサとは別に、カメラ(通常、撮影した画像を処理するアルゴリズムとともに用いられる)を使用している。本発明は、このような運転支援装置に係るものである。
【0007】
現在のところ、車両の走行に係るパラメータを、車両が坂道に接近しているか否かによって決定する手段は存在しない。しかし、このようなパラメータの多くは、車両が坂道を通過するか否かによって、調整することが可能であった。
【0008】
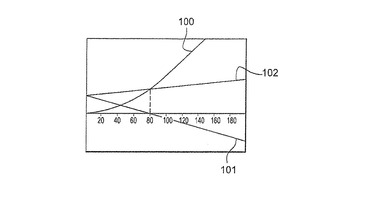
路面の照明についていうと、坂道が現れると、前照灯ビームによって照らし出される範囲は影響を受け、運転者の視界は狭まる。すなわち、図1に示すように、車両が平坦な道路を走行しているときには、前照灯ビームは、80m先を照らし出すことができる。しかし、車両が、上り坂100に接近すると、前照灯ビームが照らし出す範囲は狭まり、直線101(前照灯ビームの上限を表す)で示すように、40m先しか照らし出せなくなる。上り坂100の路面について、平坦な道路と同様に80m先を照らし出すには、直線102で示すように、前照灯ビームの向きを変える必要がある。
【0009】
車両が坂道を通過するか否かによって調整しえたパラメータのもう1つの例は、エンジンに対する燃料の供給量である。例えば、上り坂で、平坦な道路と同様の車速を維持するには、エンジンは、平坦な道を走るときよりも多くの燃料を消費しなければならない。上り坂の存在が予測されず、燃料の供給量が調整されない場合には、上り坂が開始すると、車両の速度は低下し、運転の心地よさを損なうことになる。
【0010】
従って、坂道の存在を予測することができないと、運転の心地よさは減ずることになる。
【発明の開示】
【発明が解決しようとする課題】
【0011】
本発明は、上述の問題に対する解決策を提供することを目的としている。すなわち、本発明は、車両の前方における坂道の存在を予測しうる手段を提供する。
【0012】
そのために、本発明は、車両が通過する道路の傾斜角度を自動的に計算しうるプロセスをも提供する。また、車両に本発明に係る装置が搭載してあれば、坂道に差し掛かったときに、運転者は、坂道の傾斜角度(勾配ともいう)を正確に知ることができる。
【課題を解決するための手段】
【0013】
本発明は、基本的には、車両が通過しようとする坂道の傾斜角度の自動計算プロセスに関するものであり。車両には、前方の道路の画像を撮影しうるカメラが搭載される。
【0014】
この自動計算プロセスは、
−車両に装備されているカメラによって撮影された前方の道路の画像において、近傍の道路の両側に位置する第1の要素および第2の要素を含む第1の対象地点にあって、道路に沿って繰り返して延びる第1の参照マークを検知する過程と、
−遠方の道路の両側に位置する第2の対象地点における第2の参照マークを検知する過程と、
−画像処理システムを用いて、第1の参照マークが延びる方向と、第2の参照マークが延びる方向との変化を検出する過程と、
−変化が検出されたときに、坂道の存在を認識し、かつ変化の大きさから、第2の対象地点までの傾斜角度を算出する過程とを含んでいる。
【0015】
本発明に係る自動計算プロセスは、上述の特徴に加えて、次のいずれかの特徴を有するのが好ましい。
−前記第1および第2の参照マークは、路面の表示である。
−前記第1および第2の参照マークは、道路の路肩側に位置するものである。
−前記坂道の傾斜角度を算出する過程は、第1の参照マークの位置において、道路が平坦であると仮定して演算を行なう過程を含んでいる。
−前記坂道の傾斜角度を算出する過程は、第1の参照マークと第2の参照マークとの間において、道路の幅員が一定であると仮定して演算を行なう過程を含んでいる。
−前記第2の対象地点は、カメラが撮影しうる最大の距離にある。
−前記坂道の傾斜角度を算出する過程は、
−第1の参照マークにおいては道路が平坦である仮定しえ、カメラで撮影した画像上の垂直距離を基に、第1の参照マークまでの距離を決定する過程と、
−前記画像上で、第1の参照マークに含まれる第1の要素(301)および第2の要素(302)の間に存在する画素の数を計数する過程と、
−画素の計数値、および第1の参照マークまでの距離から、第1の対象地点における道路の幅員を導出する過程と、
−第1の対象地点における道路の幅員を導出する過程に準じて、第2の対象地点における道路の幅員を、画素の数から導出する過程と、
−第1の対象地点から第2の対象地点まで、道路の幅員が一定であると仮定する過程と、
−画素の計数値から導出した道路の幅員を基に、車両から第2の対象地点までの実際の距離を推定する過程と、
−画素の計数値を基に、第2の対象地点の垂直位置を決定する過程と、
−道路が第2の対象地点の水平位置まで平坦であると仮定した場合における、車両から第2の対象地点までの理論上の距離を推定する過程と、
−前記実際の距離と理論上の距離との差から、カメラの装着位置の道路上への投影点から第2の対象地点までの傾斜角度を算出する過程とを含んでいる。
【0016】
上記の各特徴は、互いに両立しうる限りにおいて、組み合わせることにより、種々の実施形態を実現することができる。
【0017】
また、本発明は、上記の特徴を備える自動計算プロセスを実行しうる、車両に搭載される運転支援装置であって、
−車両の前方に延びる道路を撮像しうるカメラと、
−画像処理手段であって、
−車両の近傍の第1の対象位置において、道路の両側に位置する第1の要素および第2の要素とからなる第1の参照マークと、
−車両の遠方の第2の対象位置において、第1の参照マークと同様の要素からなる第2の参照マークとを検知するための画像処理手段と、
−画像処理システムを用いて、第1の参照マークが延びる方向と、第2の参照マークが延びる方向との変化の大きさから、カメラの装着位置の道路上への投影点から第2の対象地点までの傾斜角度を導出する計算手段と、
−坂道の傾斜角度に関する情報を解析して、前照灯の光ビームの向きを制御する手段とを備える運転支援装置をも提供する。
【0018】
さらに、本発明は、上記の特徴を備える自動計算プロセスを実行することができ、前記前照灯の光ビームの向きを制御する手段の替わりに、
−坂道の傾斜角度に関する情報を解析して、エンジンへの燃料供給量を制御する手段とを備える運転支援装置をも提供する。
【0019】
最後に、本発明は、上記いずれかの運転支援装置を備える車両をも提供する。
【発明の効果】
【0020】
本発明によれば、坂道に至る前に、車両の走行に係るパラメータ(前照灯の向きやエンジンの燃料消費量)を調整するための前提となる情報を得ることができ、運転の心地よさを増すことができる。
【発明を実施するための最良の形態】
【0021】
添付の図面は、前照灯ビームの向きを調整するために、坂道の傾斜角度を自動的に計算するプロセスを、本発明の技術的範囲を限定する意図なしに示すものである。しかし、本発明に係る傾斜角度の自動計算プロセスは、上記の用途以外にも適用しうる。添付の各図面においては、特に断らない限り、共通の要素には、同一の符号を付してある。
【0022】
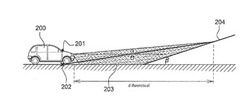
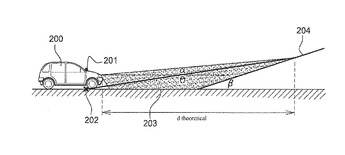
つぎに、図2と図3を参照して、本発明に係るプロセスの一実施形態を説明する。図2に示す車両200には、カメラ201が搭載されている。車両200は、平坦な道路203を走行しており、まもなく上り坂204に差し掛かるところである。図3は、カメラ201によって撮影された道路203の画像を、本発明に係る自動計算プロセス実行のための種々のパラメータとともに模式的に示す。
【0023】
次に、本発明に係る自動計算プロセスの各過程を説明する。
【0024】
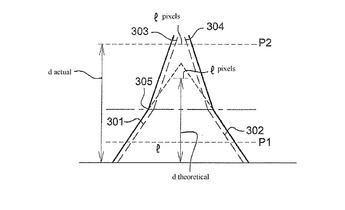
第1の過程においては、カメラ201により撮影した画像の中で、カメラ201を道路上に垂直に投影した位置202を、画像処理を通して特定の形状を認識しうるアルゴリズムによって検知する。この過程により、第1の対象地点P1において、第1の参照マーク(すなわち、第1の要素301と第2の要素302(道路203の両側において、車両の走行方向と概ね平行に延びている2本の車道外側線))が検知される。第1の対象地点P1としては、車両の近傍の位置(例えば約10m前方)を選択するのが好ましい。
【0025】
次に、カメラ201と上記の形状認識アルゴリズムを用いて、道路上の第2の対象地点P2において、上記第1の参照マークと同種の第2の参照マーク(第1の要素303と第2の要素304からなる)を検知する。第2の参照マークの位置は、カメラ201で撮影可能な最大の距離(例えば約50m前方)に設定するのが好ましい。第1の参照マークと第2の参照マークの間隔が、検出可能な最大値まで大であれば、傾斜角度の計算値は正確になる。
【0026】
第1および第2の参照マークとしては、路面の表示を採用するのが好ましい。路面の表示は、道路203に沿って繰り返し現れ、かつ長く延びているため、これを利用して、傾斜角度の存在を検知することができる。傾斜角度が存在する場合、画像における路面の表示は、道路の平坦部において延びるものと、上り坂204において延びるものとの間で折れ曲がる。
【0027】
上記の画像の場合、現地点からごく短い距離だけ前方の地点、すなわち第1の対象地点P1までは、道路は平坦であると仮定するのが好ましい。このようにして、第1の過程において、第1の対象地点P1の画像における位置(垂直方向の位置)から、この第1の対象地点P1までの距離を求める。
【0028】
ついで、第2の過程において、第1の要素301と第2の要素302との間にある画素の数を数え、メートル単位に換算することによって、道路の幅員lを計算する。
【0029】
第3の過程においては、第2の対象地点P2における道路の幅員lを、画素の数から求める。第1の対象地点P1においても、第2の対象地点P2においても、道路の幅員は一定であることを考慮すると、第1の対象地点P1から第2の対象地点P2までの実際の距離dactualは、第2の対象地点P2における(第1の要素303と第2の要素304の間の)画素の数を基に、計算することができる。
【0030】
第4の過程においては、画像における第2の対象地点P2の垂直位置を、画素の数から計算する。ついで、この計算結果から、道路が、第1の対象地点P1から、第2の対象地点P2の水平位置まで平坦であると仮定し、車両から第2の対象地点P2の水平位置までの理論的な距離dtheoreticalを導出する。
【0031】
理論的な距離dtheoreticalと実際の距離dactualの間に差があれば、道路の傾きの変化点305が存在することを確認しうる。理論的な距離dtheoreticalおよび実際の距離dactualは、第1の参照マークと第2の参照マークの間に位置する変化点305の性質を決定する。この変化点305は、傾斜角度を算出する材料となる。三角関数の公式を使って、理論的な距離dtheoreticalと実際の距離dactualの差から、カメラ201を道路上に垂直に投影した位置202と、第2の対象地点P2(その理論的な距離dtheoreticalと実際の距離dactualが計算される)とがなす傾斜角度の平均値θを求めることができる。この傾斜角度の平均値θは、上り坂204の傾斜角βに近似することができる。
【0032】
上述の計算プロセスにおいて生ずる種々の演算は、カメラで撮影された単一の画像、または一定の時間にわたって撮影された画像(通常、連続的に撮影される)を基に行われる。
【0033】
上述の自動計算プロセスによれば、道路を一定の距離にわたって前照灯によって照らし出すことができるよう、一定の視界を確保するための前照灯の角度α(前照灯の向きを制御することにより得られる)を、傾斜角度の平均値θを基に算出することができる。第2の対象地点P2が、光ビームの届く範囲よりも近くに位置する場合には、傾斜角度の平均値は、運転者が所望する範囲をすべて照らし出すことができる角度αを求めるために、第2の対象地点P2を超えた地点を対象として、一定になると想定される。
【0034】
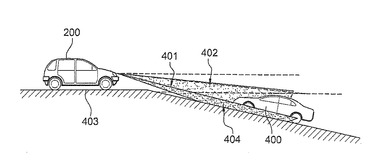
図4に示すように、本発明に係る自動計算プロセスによれば、平坦な道路403の先に下り坂404が続いている場合にも、傾斜角度を検出することができる。この場合には、平坦な道路上で射出されていた前照灯の光ビーム402を、下り坂404を向かってくる対向車両400の運転者を幻惑することのないよう、下向きの光ビーム401に修正する。
【0035】
本発明に係る計算プロセスによれば、坂道の存在を予測し、車両が坂道を登り始めるときに、走行を最適なものにするため、エンジンに供給する燃料の流量を制御することもできる。制御の方法としては、例えば、エンジンへの燃料の供給量を、傾斜角度の平均値θと関連づけることができる。
【図面の簡単な説明】
【0036】
【図1】車両が上り坂に接近するときに生ずる問題を模式的に表す図である。
【図2】本発明に係るプロセスを適用し、平地とは異なる走行パラメータで上り坂を通過しようとする車両を模式的に示す図である。
【図3】本発明に係るプロセスにおいて用いる、車両前方の上り坂の画像を模式的に示す図である。
【図4】本発明に係るプロセスを適用し、平地とは異なる走行パラメータで下り坂を通過しようとする車両を模式的に示す図である。
【符号の説明】
【0037】
200 車両
201 カメラ
203 平坦な道路
204 上り坂
202 カメラを道路上に垂直に投影した位置
301,302 第1の参照マーク
303,304 第2の参照マーク
401 下向きの光ビーム
402 前照灯の光ビーム
403 平坦な道路
404 下り坂
P1 第1の対象地点
P2 第2の対象地点
α 前照灯の角度
β 上り坂の傾斜角
θ 傾斜角度の平均値
【技術分野】
【0001】
本発明は、坂道の傾斜角度の自動計算プロセスに関する。また、本発明は、この自動計算プロセスを実行しうる装置にも関する。
【0002】
本発明に係る自動計算プロセスによれば、上り坂であるか下り坂であるかに拘らず、傾斜角度を計算することにより、車両が坂道に差し掛かることを予測し、坂道に至るまでの走行パラメータを最適なものにして、坂道への接近を容易にすることができる。上述のパラメータには、エンジンの回転速度や、前照灯の向き等が含まれる。
【0003】
本発明は、高度運転支援システムの技術分野に属する。この分野に属する装置としては、障害物探知装置、暗視装置、カーブに接近したときの運転者警告装置、運転条件に応じて前照灯の向きや光度を最適にするための装置等が知られている。これらの装置は、みな、何らかのセンサを利用している。一方、上述の装置によって導き出される結果は、概ね、レーダー、ライダー(lidar)、超音波等の技術に基づいており、相対的に車両に低速度で接近する障害物も検知することができる。また、上記の結果は、カメラ等を用いるプロセスにも基づいている。
【背景技術】
【0004】
一般に遠隔的な検知(例えばACC(Autonomous Cruise Control;自律走行制御)システム)に用いられるレーダーやライダーのようなセンサは、路上における対象物の位置や、2次元的な速度に関する直接的な情報を提供する。この情報には、対象物の分類や、この対象物についての有益な情報(2次元座標上の位置や、センサを装備している車両または固定参照点(車両の位置がこの参照点に対して定められるようになっている場合)に対する相対的な速度等)が含まれる。
【0005】
しかし、上述のセンサにおける観測角度は広くないため、対象物の位置の角度についての情報は正確ではない。さらに、これらのセンサは、車両がどの車線を走行しているか、車線の数、道路の曲線形状、観測角度範囲外の障害物の分類、道路標識その他の道路基盤データ等、道路環境に関する情報を提供することができない。
【0006】
したがって、多くの運転支援装置は、センサとは別に、カメラ(通常、撮影した画像を処理するアルゴリズムとともに用いられる)を使用している。本発明は、このような運転支援装置に係るものである。
【0007】
現在のところ、車両の走行に係るパラメータを、車両が坂道に接近しているか否かによって決定する手段は存在しない。しかし、このようなパラメータの多くは、車両が坂道を通過するか否かによって、調整することが可能であった。
【0008】
路面の照明についていうと、坂道が現れると、前照灯ビームによって照らし出される範囲は影響を受け、運転者の視界は狭まる。すなわち、図1に示すように、車両が平坦な道路を走行しているときには、前照灯ビームは、80m先を照らし出すことができる。しかし、車両が、上り坂100に接近すると、前照灯ビームが照らし出す範囲は狭まり、直線101(前照灯ビームの上限を表す)で示すように、40m先しか照らし出せなくなる。上り坂100の路面について、平坦な道路と同様に80m先を照らし出すには、直線102で示すように、前照灯ビームの向きを変える必要がある。
【0009】
車両が坂道を通過するか否かによって調整しえたパラメータのもう1つの例は、エンジンに対する燃料の供給量である。例えば、上り坂で、平坦な道路と同様の車速を維持するには、エンジンは、平坦な道を走るときよりも多くの燃料を消費しなければならない。上り坂の存在が予測されず、燃料の供給量が調整されない場合には、上り坂が開始すると、車両の速度は低下し、運転の心地よさを損なうことになる。
【0010】
従って、坂道の存在を予測することができないと、運転の心地よさは減ずることになる。
【発明の開示】
【発明が解決しようとする課題】
【0011】
本発明は、上述の問題に対する解決策を提供することを目的としている。すなわち、本発明は、車両の前方における坂道の存在を予測しうる手段を提供する。
【0012】
そのために、本発明は、車両が通過する道路の傾斜角度を自動的に計算しうるプロセスをも提供する。また、車両に本発明に係る装置が搭載してあれば、坂道に差し掛かったときに、運転者は、坂道の傾斜角度(勾配ともいう)を正確に知ることができる。
【課題を解決するための手段】
【0013】
本発明は、基本的には、車両が通過しようとする坂道の傾斜角度の自動計算プロセスに関するものであり。車両には、前方の道路の画像を撮影しうるカメラが搭載される。
【0014】
この自動計算プロセスは、
−車両に装備されているカメラによって撮影された前方の道路の画像において、近傍の道路の両側に位置する第1の要素および第2の要素を含む第1の対象地点にあって、道路に沿って繰り返して延びる第1の参照マークを検知する過程と、
−遠方の道路の両側に位置する第2の対象地点における第2の参照マークを検知する過程と、
−画像処理システムを用いて、第1の参照マークが延びる方向と、第2の参照マークが延びる方向との変化を検出する過程と、
−変化が検出されたときに、坂道の存在を認識し、かつ変化の大きさから、第2の対象地点までの傾斜角度を算出する過程とを含んでいる。
【0015】
本発明に係る自動計算プロセスは、上述の特徴に加えて、次のいずれかの特徴を有するのが好ましい。
−前記第1および第2の参照マークは、路面の表示である。
−前記第1および第2の参照マークは、道路の路肩側に位置するものである。
−前記坂道の傾斜角度を算出する過程は、第1の参照マークの位置において、道路が平坦であると仮定して演算を行なう過程を含んでいる。
−前記坂道の傾斜角度を算出する過程は、第1の参照マークと第2の参照マークとの間において、道路の幅員が一定であると仮定して演算を行なう過程を含んでいる。
−前記第2の対象地点は、カメラが撮影しうる最大の距離にある。
−前記坂道の傾斜角度を算出する過程は、
−第1の参照マークにおいては道路が平坦である仮定しえ、カメラで撮影した画像上の垂直距離を基に、第1の参照マークまでの距離を決定する過程と、
−前記画像上で、第1の参照マークに含まれる第1の要素(301)および第2の要素(302)の間に存在する画素の数を計数する過程と、
−画素の計数値、および第1の参照マークまでの距離から、第1の対象地点における道路の幅員を導出する過程と、
−第1の対象地点における道路の幅員を導出する過程に準じて、第2の対象地点における道路の幅員を、画素の数から導出する過程と、
−第1の対象地点から第2の対象地点まで、道路の幅員が一定であると仮定する過程と、
−画素の計数値から導出した道路の幅員を基に、車両から第2の対象地点までの実際の距離を推定する過程と、
−画素の計数値を基に、第2の対象地点の垂直位置を決定する過程と、
−道路が第2の対象地点の水平位置まで平坦であると仮定した場合における、車両から第2の対象地点までの理論上の距離を推定する過程と、
−前記実際の距離と理論上の距離との差から、カメラの装着位置の道路上への投影点から第2の対象地点までの傾斜角度を算出する過程とを含んでいる。
【0016】
上記の各特徴は、互いに両立しうる限りにおいて、組み合わせることにより、種々の実施形態を実現することができる。
【0017】
また、本発明は、上記の特徴を備える自動計算プロセスを実行しうる、車両に搭載される運転支援装置であって、
−車両の前方に延びる道路を撮像しうるカメラと、
−画像処理手段であって、
−車両の近傍の第1の対象位置において、道路の両側に位置する第1の要素および第2の要素とからなる第1の参照マークと、
−車両の遠方の第2の対象位置において、第1の参照マークと同様の要素からなる第2の参照マークとを検知するための画像処理手段と、
−画像処理システムを用いて、第1の参照マークが延びる方向と、第2の参照マークが延びる方向との変化の大きさから、カメラの装着位置の道路上への投影点から第2の対象地点までの傾斜角度を導出する計算手段と、
−坂道の傾斜角度に関する情報を解析して、前照灯の光ビームの向きを制御する手段とを備える運転支援装置をも提供する。
【0018】
さらに、本発明は、上記の特徴を備える自動計算プロセスを実行することができ、前記前照灯の光ビームの向きを制御する手段の替わりに、
−坂道の傾斜角度に関する情報を解析して、エンジンへの燃料供給量を制御する手段とを備える運転支援装置をも提供する。
【0019】
最後に、本発明は、上記いずれかの運転支援装置を備える車両をも提供する。
【発明の効果】
【0020】
本発明によれば、坂道に至る前に、車両の走行に係るパラメータ(前照灯の向きやエンジンの燃料消費量)を調整するための前提となる情報を得ることができ、運転の心地よさを増すことができる。
【発明を実施するための最良の形態】
【0021】
添付の図面は、前照灯ビームの向きを調整するために、坂道の傾斜角度を自動的に計算するプロセスを、本発明の技術的範囲を限定する意図なしに示すものである。しかし、本発明に係る傾斜角度の自動計算プロセスは、上記の用途以外にも適用しうる。添付の各図面においては、特に断らない限り、共通の要素には、同一の符号を付してある。
【0022】
つぎに、図2と図3を参照して、本発明に係るプロセスの一実施形態を説明する。図2に示す車両200には、カメラ201が搭載されている。車両200は、平坦な道路203を走行しており、まもなく上り坂204に差し掛かるところである。図3は、カメラ201によって撮影された道路203の画像を、本発明に係る自動計算プロセス実行のための種々のパラメータとともに模式的に示す。
【0023】
次に、本発明に係る自動計算プロセスの各過程を説明する。
【0024】
第1の過程においては、カメラ201により撮影した画像の中で、カメラ201を道路上に垂直に投影した位置202を、画像処理を通して特定の形状を認識しうるアルゴリズムによって検知する。この過程により、第1の対象地点P1において、第1の参照マーク(すなわち、第1の要素301と第2の要素302(道路203の両側において、車両の走行方向と概ね平行に延びている2本の車道外側線))が検知される。第1の対象地点P1としては、車両の近傍の位置(例えば約10m前方)を選択するのが好ましい。
【0025】
次に、カメラ201と上記の形状認識アルゴリズムを用いて、道路上の第2の対象地点P2において、上記第1の参照マークと同種の第2の参照マーク(第1の要素303と第2の要素304からなる)を検知する。第2の参照マークの位置は、カメラ201で撮影可能な最大の距離(例えば約50m前方)に設定するのが好ましい。第1の参照マークと第2の参照マークの間隔が、検出可能な最大値まで大であれば、傾斜角度の計算値は正確になる。
【0026】
第1および第2の参照マークとしては、路面の表示を採用するのが好ましい。路面の表示は、道路203に沿って繰り返し現れ、かつ長く延びているため、これを利用して、傾斜角度の存在を検知することができる。傾斜角度が存在する場合、画像における路面の表示は、道路の平坦部において延びるものと、上り坂204において延びるものとの間で折れ曲がる。
【0027】
上記の画像の場合、現地点からごく短い距離だけ前方の地点、すなわち第1の対象地点P1までは、道路は平坦であると仮定するのが好ましい。このようにして、第1の過程において、第1の対象地点P1の画像における位置(垂直方向の位置)から、この第1の対象地点P1までの距離を求める。
【0028】
ついで、第2の過程において、第1の要素301と第2の要素302との間にある画素の数を数え、メートル単位に換算することによって、道路の幅員lを計算する。
【0029】
第3の過程においては、第2の対象地点P2における道路の幅員lを、画素の数から求める。第1の対象地点P1においても、第2の対象地点P2においても、道路の幅員は一定であることを考慮すると、第1の対象地点P1から第2の対象地点P2までの実際の距離dactualは、第2の対象地点P2における(第1の要素303と第2の要素304の間の)画素の数を基に、計算することができる。
【0030】
第4の過程においては、画像における第2の対象地点P2の垂直位置を、画素の数から計算する。ついで、この計算結果から、道路が、第1の対象地点P1から、第2の対象地点P2の水平位置まで平坦であると仮定し、車両から第2の対象地点P2の水平位置までの理論的な距離dtheoreticalを導出する。
【0031】
理論的な距離dtheoreticalと実際の距離dactualの間に差があれば、道路の傾きの変化点305が存在することを確認しうる。理論的な距離dtheoreticalおよび実際の距離dactualは、第1の参照マークと第2の参照マークの間に位置する変化点305の性質を決定する。この変化点305は、傾斜角度を算出する材料となる。三角関数の公式を使って、理論的な距離dtheoreticalと実際の距離dactualの差から、カメラ201を道路上に垂直に投影した位置202と、第2の対象地点P2(その理論的な距離dtheoreticalと実際の距離dactualが計算される)とがなす傾斜角度の平均値θを求めることができる。この傾斜角度の平均値θは、上り坂204の傾斜角βに近似することができる。
【0032】
上述の計算プロセスにおいて生ずる種々の演算は、カメラで撮影された単一の画像、または一定の時間にわたって撮影された画像(通常、連続的に撮影される)を基に行われる。
【0033】
上述の自動計算プロセスによれば、道路を一定の距離にわたって前照灯によって照らし出すことができるよう、一定の視界を確保するための前照灯の角度α(前照灯の向きを制御することにより得られる)を、傾斜角度の平均値θを基に算出することができる。第2の対象地点P2が、光ビームの届く範囲よりも近くに位置する場合には、傾斜角度の平均値は、運転者が所望する範囲をすべて照らし出すことができる角度αを求めるために、第2の対象地点P2を超えた地点を対象として、一定になると想定される。
【0034】
図4に示すように、本発明に係る自動計算プロセスによれば、平坦な道路403の先に下り坂404が続いている場合にも、傾斜角度を検出することができる。この場合には、平坦な道路上で射出されていた前照灯の光ビーム402を、下り坂404を向かってくる対向車両400の運転者を幻惑することのないよう、下向きの光ビーム401に修正する。
【0035】
本発明に係る計算プロセスによれば、坂道の存在を予測し、車両が坂道を登り始めるときに、走行を最適なものにするため、エンジンに供給する燃料の流量を制御することもできる。制御の方法としては、例えば、エンジンへの燃料の供給量を、傾斜角度の平均値θと関連づけることができる。
【図面の簡単な説明】
【0036】
【図1】車両が上り坂に接近するときに生ずる問題を模式的に表す図である。
【図2】本発明に係るプロセスを適用し、平地とは異なる走行パラメータで上り坂を通過しようとする車両を模式的に示す図である。
【図3】本発明に係るプロセスにおいて用いる、車両前方の上り坂の画像を模式的に示す図である。
【図4】本発明に係るプロセスを適用し、平地とは異なる走行パラメータで下り坂を通過しようとする車両を模式的に示す図である。
【符号の説明】
【0037】
200 車両
201 カメラ
203 平坦な道路
204 上り坂
202 カメラを道路上に垂直に投影した位置
301,302 第1の参照マーク
303,304 第2の参照マーク
401 下向きの光ビーム
402 前照灯の光ビーム
403 平坦な道路
404 下り坂
P1 第1の対象地点
P2 第2の対象地点
α 前照灯の角度
β 上り坂の傾斜角
θ 傾斜角度の平均値
【特許請求の範囲】
【請求項1】
車両(200)が接近している坂道(204)上の対象地点までの傾斜角度(θ)の自動計算プロセスであって、
−車両に装備されているカメラ(201)によって撮影された前方の道路(203)の画像において、近傍の道路の両側に位置する第1の要素(301)および第2の要素(302)を含む第1の対象地点(P1)にあって、道路に沿って繰り返して延びる第1の参照マークを検知する過程と、
−遠方の道路の両側に位置する第2の対象地点(P2)における第2の参照マークを検知する過程と、
−画像処理システムを用いて、第1の参照マークが延びる方向と、第2の参照マークが延びる方向との変化を検出する過程と、
−変化が検出されたときに、坂道(204)の存在を認識し、かつ変化の大きさから、第2の対象地点(P2)までの傾斜角度(θ)を算出する過程とを含む自動計算プロセス。
【請求項2】
前記第1および第2の参照マークは、路面の表示であることを特徴とする請求項1に記載の自動計算プロセス。
【請求項3】
前記第1および第2の参照マークは、道路の路肩側に位置するものであることを特徴とする請求項1に記載の自動計算プロセス。
【請求項4】
前記坂道(204)の傾斜角度(θ)を算出する過程は、第1の参照マークの位置において、道路(203)が平坦であると仮定して演算を行なう過程を含むことを特徴とする請求項1〜3のいずれかに記載の自動計算プロセス。
【請求項5】
前記坂道(204)の傾斜角度(θ)を算出する過程は、第1の参照マークと第2の参照マークとの間において、道路の幅員が一定であると仮定して演算を行なう過程を含むことを特徴とする請求項1〜4のいずれかに記載の自動計算プロセス。
【請求項6】
前記第2の対象地点(P2)は、カメラ(201)が撮影しうる最大の距離にあることを特徴とする請求項1〜5のいずれかに記載の自動計算プロセス。
【請求項7】
前記坂道(204)の傾斜角度(θ)を算出する過程は、
−第1の参照マークにおいては道路が平坦である仮定しつつ、カメラで撮影した画像上の垂直距離を基に、第1の参照マークまでの距離を決定する過程と、
−前記画像上で、第1の参照マークに含まれる第1の要素(301)および第2の要素(302)の間に存在する画素の数を計数する過程と、
−画素の計数値、および第1の参照マークまでの距離から、第1の対象地点(P1)における道路の幅員を導出する過程と、
−第1の対象地点(P1)における道路の幅員を導出する過程に準じて、第2の対象地点(P2)における道路の幅員を、画素の数から導出する過程と、
−第1の対象地点(P1)から第2の対象地点(P2)まで、道路の幅員が一定であると仮定する過程と、
−画素の計数値から導出した道路の幅員を基に、車両から第2の対象地点(P2)までの実際の距離(dactual)を推定する過程と、
−画素の計数値を基に、第2の対象地点(P2)の垂直位置を決定する過程と、
−道路が第2の対象地点(P2)の水平位置まで平坦であると仮定した場合における、車両から第2の対象地点(P2)までの理論上の距離(dtheoretical)を推定する過程と、
−前記実際の距離(dactual)と理論上の距離(dtheoretical)との差から、カメラの装着位置の道路上への投影点(202)から第2の対象地点(P2)までの傾斜角度(θ)を算出する過程とを含むことを特徴とする請求項1〜6のいずれかに記載の自動計算プロセス。
【請求項8】
請求項1〜7のいずれかに記載の自動計算プロセスを実行しうる、車両(200)に搭載される運転支援装置であって、
−車両の前方に延びる道路(203)を撮像しうるカメラ(201)と、
−画像処理手段であって、
−車両の近傍の第1の対象位置(P1)において、道路の両側に位置する第1の要素(301)および第2の要素(302)とからなる第1の参照マークと、
−車両の遠方の第2の対象位置(P2)において、第1の参照マークと同様の要素(303)(304)からなる第2の参照マークとを検知するための画像処理手段と、
−画像処理システムを用いて、第1の参照マークが延びる方向と、第2の参照マークが延びる方向との変化の大きさから、カメラの装着位置の道路上への投影点(202)から第2の対象地点(P2)までの傾斜角度(θ)を導出する計算手段と、
−坂道の傾斜角度(θ)に関する情報を解析して、前照灯の光ビームの向きを制御する手段とを備える運転支援装置。
【請求項9】
請求項1〜7のいずれかに記載の自動計算プロセスを実行しうる、車両(200)に搭載される運転支援装置であって、
−車両の前方に延びる道路(203)を撮像しうるカメラ(201)と、
−画像処理手段であって、
−車両の近傍の第1の対象位置(P1)において、道路の両側に位置する第1の要素(301)および第2の要素(302)とからなる第1の参照マークと、
−車両の遠方の第2の対象位置(P2)において、第1の参照マークと同様の要素(303)(304)からなる第2の参照マークとを検知するための画像処理手段と、
−画像処理システムを用いて、第1の参照マークが延びる方向と、第2の参照マークが延びる方向との変化の大きさから、カメラの装着位置の道路上への投影点(202)から第2の対象地点(P2)までの傾斜角度(θ)を導出する計算手段と、
−坂道の傾斜角度(θ)に関する情報を解析して、エンジンへの燃料供給量を制御する手段とを備える運転支援装置。
【請求項10】
請求項8または9に記載の運転支援装置を備える車両(200)。
【請求項1】
車両(200)が接近している坂道(204)上の対象地点までの傾斜角度(θ)の自動計算プロセスであって、
−車両に装備されているカメラ(201)によって撮影された前方の道路(203)の画像において、近傍の道路の両側に位置する第1の要素(301)および第2の要素(302)を含む第1の対象地点(P1)にあって、道路に沿って繰り返して延びる第1の参照マークを検知する過程と、
−遠方の道路の両側に位置する第2の対象地点(P2)における第2の参照マークを検知する過程と、
−画像処理システムを用いて、第1の参照マークが延びる方向と、第2の参照マークが延びる方向との変化を検出する過程と、
−変化が検出されたときに、坂道(204)の存在を認識し、かつ変化の大きさから、第2の対象地点(P2)までの傾斜角度(θ)を算出する過程とを含む自動計算プロセス。
【請求項2】
前記第1および第2の参照マークは、路面の表示であることを特徴とする請求項1に記載の自動計算プロセス。
【請求項3】
前記第1および第2の参照マークは、道路の路肩側に位置するものであることを特徴とする請求項1に記載の自動計算プロセス。
【請求項4】
前記坂道(204)の傾斜角度(θ)を算出する過程は、第1の参照マークの位置において、道路(203)が平坦であると仮定して演算を行なう過程を含むことを特徴とする請求項1〜3のいずれかに記載の自動計算プロセス。
【請求項5】
前記坂道(204)の傾斜角度(θ)を算出する過程は、第1の参照マークと第2の参照マークとの間において、道路の幅員が一定であると仮定して演算を行なう過程を含むことを特徴とする請求項1〜4のいずれかに記載の自動計算プロセス。
【請求項6】
前記第2の対象地点(P2)は、カメラ(201)が撮影しうる最大の距離にあることを特徴とする請求項1〜5のいずれかに記載の自動計算プロセス。
【請求項7】
前記坂道(204)の傾斜角度(θ)を算出する過程は、
−第1の参照マークにおいては道路が平坦である仮定しつつ、カメラで撮影した画像上の垂直距離を基に、第1の参照マークまでの距離を決定する過程と、
−前記画像上で、第1の参照マークに含まれる第1の要素(301)および第2の要素(302)の間に存在する画素の数を計数する過程と、
−画素の計数値、および第1の参照マークまでの距離から、第1の対象地点(P1)における道路の幅員を導出する過程と、
−第1の対象地点(P1)における道路の幅員を導出する過程に準じて、第2の対象地点(P2)における道路の幅員を、画素の数から導出する過程と、
−第1の対象地点(P1)から第2の対象地点(P2)まで、道路の幅員が一定であると仮定する過程と、
−画素の計数値から導出した道路の幅員を基に、車両から第2の対象地点(P2)までの実際の距離(dactual)を推定する過程と、
−画素の計数値を基に、第2の対象地点(P2)の垂直位置を決定する過程と、
−道路が第2の対象地点(P2)の水平位置まで平坦であると仮定した場合における、車両から第2の対象地点(P2)までの理論上の距離(dtheoretical)を推定する過程と、
−前記実際の距離(dactual)と理論上の距離(dtheoretical)との差から、カメラの装着位置の道路上への投影点(202)から第2の対象地点(P2)までの傾斜角度(θ)を算出する過程とを含むことを特徴とする請求項1〜6のいずれかに記載の自動計算プロセス。
【請求項8】
請求項1〜7のいずれかに記載の自動計算プロセスを実行しうる、車両(200)に搭載される運転支援装置であって、
−車両の前方に延びる道路(203)を撮像しうるカメラ(201)と、
−画像処理手段であって、
−車両の近傍の第1の対象位置(P1)において、道路の両側に位置する第1の要素(301)および第2の要素(302)とからなる第1の参照マークと、
−車両の遠方の第2の対象位置(P2)において、第1の参照マークと同様の要素(303)(304)からなる第2の参照マークとを検知するための画像処理手段と、
−画像処理システムを用いて、第1の参照マークが延びる方向と、第2の参照マークが延びる方向との変化の大きさから、カメラの装着位置の道路上への投影点(202)から第2の対象地点(P2)までの傾斜角度(θ)を導出する計算手段と、
−坂道の傾斜角度(θ)に関する情報を解析して、前照灯の光ビームの向きを制御する手段とを備える運転支援装置。
【請求項9】
請求項1〜7のいずれかに記載の自動計算プロセスを実行しうる、車両(200)に搭載される運転支援装置であって、
−車両の前方に延びる道路(203)を撮像しうるカメラ(201)と、
−画像処理手段であって、
−車両の近傍の第1の対象位置(P1)において、道路の両側に位置する第1の要素(301)および第2の要素(302)とからなる第1の参照マークと、
−車両の遠方の第2の対象位置(P2)において、第1の参照マークと同様の要素(303)(304)からなる第2の参照マークとを検知するための画像処理手段と、
−画像処理システムを用いて、第1の参照マークが延びる方向と、第2の参照マークが延びる方向との変化の大きさから、カメラの装着位置の道路上への投影点(202)から第2の対象地点(P2)までの傾斜角度(θ)を導出する計算手段と、
−坂道の傾斜角度(θ)に関する情報を解析して、エンジンへの燃料供給量を制御する手段とを備える運転支援装置。
【請求項10】
請求項8または9に記載の運転支援装置を備える車両(200)。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2009−133830(P2009−133830A)
【公開日】平成21年6月18日(2009.6.18)
【国際特許分類】
【外国語出願】
【出願番号】特願2008−266604(P2008−266604)
【出願日】平成20年10月15日(2008.10.15)
【出願人】(391011607)ヴァレオ ビジョン (133)
【氏名又は名称原語表記】VALEO VISION
【Fターム(参考)】
【公開日】平成21年6月18日(2009.6.18)
【国際特許分類】
【出願番号】特願2008−266604(P2008−266604)
【出願日】平成20年10月15日(2008.10.15)
【出願人】(391011607)ヴァレオ ビジョン (133)
【氏名又は名称原語表記】VALEO VISION
【Fターム(参考)】
[ Back to top ]